Embed Size (px)
Citation preview
![Page 1: [IEEE 2013 10th IEEE International Conference on Control and Automation (ICCA) - Hangzhou, China (2013.06.12-2013.06.14)] 2013 10th IEEE International Conference on Control and Automation](https://reader037.pdfslide.net/reader037/viewer/2022100205/5750abcb1a28abcf0ce22757/html5/thumbnails/1.jpg)
Chip Design of Fuzzy Neural Networks for Face Recognition in Mobile-Robots
Gin-Der Wu
Department of Electrical Engineering
National Chi Nan University
Puli, Taiwan, R.O. C.
Zhen-Wei Zhu
Department of Electrical Engineering
National Chi Nan University
Puli, Taiwan, R.O. C.
Abstract- Fuzzy neural networks (FNN) have been successfully
applied to classification problems. In this study, we design a
FNN-based chip to achieve the face recognition of
mobile-robots. The underlying notion of the proposed FNN is
to split the generation of fuzzy rules into linear discriminant
analysis (LDA) and Gaussian mixture model (GMM). In LDA,
the weights are updated by seeking directions that are efficient
for discrimination. In GMM, the parameter learning adopts
the gradient descent method to reduce the cost function. The
major contribution of this paper is to propose the hardware
architecture of FNN chip. Furthermore, it has been fabricated
in UMC 90nm technology. Since LDA-derived fuzzy rules
increase the discriminative capability among different classes,
the proposed FNN chip can classify highly confusable
patterns.
Keywords: fuzzy neural networks, linear discriminant analysis
(LDA), Gaussian mixture model (GMM).
I. INTRODUCTION
A fuzzy system provides human-like knowledge that
consists of a group of fuzzy IF–THEN rules. FNN
integrates the capability of fuzzy reasoning in handling
uncertain information and the capability of neural networks
in learning from processes. They have been successfully
applied in areas such as pattern classification, control, and
signal processing [1]-[4]. In particular, fuzzy-rule-based
methods for pattern classification have received
considerable attention [5]-[7]. To create fuzzy IF-THEN
rules, most methods adopt back-propagation to train
parameters of fuzzy rules. Since the training of fuzzy rules
can be regarded as the clustering of input data, the method
of clustering can be also adopted for fuzzy rules generation.
In these FNNs, parameters are learned by minimizing only
the training error (or empirical risk), which does not
account for a small test error. Generalization performance
may be inadequate when the FNN is over-fitted.
In classifiers, Gaussian mapping is the conventional
means to map the input patterns into a feature space. To
consider the noise attack or malice distortion, the most
important aspect of classification is not the training error or
generalization ability. In fact, the kernel is the
discriminative capability. This idea motivates us to split the
generation of fuzzy rules into linear discriminant analysis
(LDA) and Gaussian mixture model (GMM). In LDA, the
weights are updated by seeking directions that are efficient
for discrimination. In GMM, the parameter learning adopts
the gradient descent method to adjust the shape of the
Gaussian membership function and reduce the cost function.
Based on this concept, this work adopts a maximizing
discriminability based self-organizing fuzzy network
(MDSOFN) [8]. In contrast with the other FNN, MDSOFN
has a higher discriminative capability, while preserving the
small network size of FNN. The major contribution of this
paper is to propose the hardware architecture of MDSOFN.
To implement the FNN, this paper uses
hardware/software co-design method. Calculus chain rule is
applied to update the weights of fuzzy-networks. FNN can
implement the nonlinear function to classify confusable
patterns.
Gaussian class
x1 xj xn
Within Class SW & Between Class SB
x1 xj xn
... ... ... ...
y
Layer1
Layer2
Layer3
Layer4
Layer5
w1l
w2l
w3l
t1 tm
Fig. 1 Structure of fuzzy neural network.
II. STRUCTURE OF FNN
This section discusses the optimization of fuzzy rules for
classification problems. The structure of FNN is shown in
2013 10th IEEE International Conference on Control and Automation (ICCA)Hangzhou, China, June 12-14, 2013
978-1-4673-4708-2/13/$31.00 ©2013 IEEE 619
![Page 2: [IEEE 2013 10th IEEE International Conference on Control and Automation (ICCA) - Hangzhou, China (2013.06.12-2013.06.14)] 2013 10th IEEE International Conference on Control and Automation](https://reader037.pdfslide.net/reader037/viewer/2022100205/5750abcb1a28abcf0ce22757/html5/thumbnails/2.jpg)
Fig. 1. There are no rules initially in this FNN, and they are
created and adapted by structure learning and parameters
learning. There are five layers in this FNN which realizes a
fuzzy model of the following form:
1 1 2 2
1 1
Rule : IF is and is ... and is ...
Then k
i i i n ni
k Mf
i mi m
k m
x A x A x A
y e a t
(1)
where ix is input variable, iy is the output, and niA
are fuzzy sets. This fuzzy rule is separated into two parts:
GMM and LDA part. The GMM part is formed as kfe ,
which implies the firing strength. This variable is the
Gaussian membership function with two parameters, mean
and variance. LDA transformation can be regarded as a
change of input coordinates. LDA can increase the
discriminability of fuzzy.
Layer 1:The nodes in this layer only transmit input
values to the next layer directly.
(1)
if u and(1)
io f . (2)
where i = 1,2,…, n .
Layer 2: In GMM part, each node corresponds to one
linguistic label of the input variables in Layer 1. With the
Gaussian membership function, the operation performed in
this layer is (2) 2
2
( )i ij
ij
u mf
and
(2) f
ijo e . (3)
where ijm and ij are the center and the width of the
Gaussian membership function.
In LDA part, the between-class matrix BS and
within-class matrix WS are calculated as follows.
( ) ( )
1 1 1
1 1( ( ) )( ( ) )
j jN NJj j T
B j
j n nj j
s N X n X nN N
(4)
( ) ( ) ( ) ( )
1 1
1[ ( ( ) )( ( ) ) ]
jNJj j j j T
W j
j nj
s N X n X nN
(5)
Layer 3: In GMM part, the links are used to perform
precondition matching of fuzzy logic rule. Hence, we use
the following AND operation.
(3)
1
p
ij
i
f u
and (3)
io f . (6)
The output node represents the firing strength of the
corresponding fuzzy rule.
In LDA part, transform the input vector X(j) into T(j) as
follows. ( ) ( )( ) ( )j jT n W X n (7)
where ( )1 2( ) [ ]j T
NX n x x x , ( )1 2( ) [ ]j T
MT n t t t and
W is optimal to increase the discriminability.
Layer 4: In this layer, LDA and GMM are merged
together. The node is the essential node that represents a
fuzzy set of output variable. The center of each Gaussian
membership function ( 0 0i ia m ) is delivered to the next
layer for the LMOM (local mean of maximum)
defuzzification operation. (4)
1
k
Kf
i
k
u e
is the firing strength
of GMM.
(4)a = 0
11
( )k
K Mf
i mi m
mk
e a a t
=01
( )k
K Mf
mi m
mk
e a t
(8)
where mia is the corresponding parameter of variable mt .
In this equation, 0 0ia t with 0 1t implies the center of a
Gaussian membership function ( 0 0i ia m ).
Layer 5: Each node in this layer corresponds to one output
variable. The node integrates all of the actions
recommended by Layer 3 and Layer 4 as follows.
(4)
1
R
i
i
f u
(9)
(4)(5)
1 0(5) 1
(4)
1
( )R MR
i mi mii mi
R
i
i
u a tu
af
u
. (10)
where R denotes the number of input space rules.
III. HARDWARE OF FNN
To calculate mean (mij), variance (σij), and parameter
(amj), the hardware of FNN is proposed in Fig.2. Their
update rules are shown as follows.
(2)(3)0
2(4)
1
( 1)
2( ) ( ) [ ( ) ( )]
ij
M
mi md m i miij kR
k ijii
m t
a t y u mm t y t y t u
u
(11)
(2) 2(3)0
3(4)
1
( 1)
2( ) ( ) [ ( ) ( )]
ij
M
mi md m i miij kR
k ijii
t
a t y u mt y t y t u
u
(12)
(4)
(4)
1
( 1)
( ) [ ( ) ( )]
mi
d imi mR
ii
a t
ua t y t y t t
u
(13)
620
![Page 3: [IEEE 2013 10th IEEE International Conference on Control and Automation (ICCA) - Hangzhou, China (2013.06.12-2013.06.14)] 2013 10th IEEE International Conference on Control and Automation](https://reader037.pdfslide.net/reader037/viewer/2022100205/5750abcb1a28abcf0ce22757/html5/thumbnails/3.jpg)
Fuzzifier Module
Defuzzier Module ijm
ij
mia
Mean RAM
Variance RAM
Parameter RAM
24
RAM_GRAM_F
24
24
Gaussian lookup table
ROM
Address generator
fe
2
2)2( )(
ij
iji muf
14
10
10
2424
24
24
12
22
Input
24
ixoutput
ky
610
Address bus
24
Learning Module
Rule count register
ijm
ij
mia
fe
2
2)2( )(
ij
iji muf
24
24
24
12
22
Control Unit
LDA
24
mu
)4(
iu
M
m mmita0
)4(
iu
M
m mmita0
Fig.2 Hardware of fuzzy neural network.
variance
xi
mean
ParameterParameter
LUT(Gaussian)
LDA
ij
ijm
a1i~amiaoi
mju
REG
REG
REG
RAM_F
RAM_G
Input pattern
Fig.3 The architecture of fuzzifier module.
REG
RAM_F
RAM_G
REG output
Fig.4 The architecture of defuzzier module.
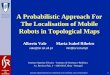
The embedded SRAM is produced by UMC 90um
cell-base technology. This memory-based structure can
reduce the control complexity and the power consumption.
The architecture of fuzzifier module is shown in Fig. 3. The
fuzzifier stage will multiply the firing strength from the
Gaussian membership function in layer 2 and store the
firing strength into SRAM (RAM_G). This fuzzifier stage
will run i x j times where i is the number of input nodes,
and j is the number of fuzzy rules. After LDA, the linear
accumulation result will be stored into SRAM (RAM_F).
The architecture of defuzzier module is shown in Fig. 4.
When the defuzzier stage is triggered, it will catch the data
from SRAMs (RAM_G, RAM_F).Finally, the proposed
FNN chip has been successfully fabricated in UMC 90nm
1P9M CMOS technology. Fig. 5 is the die photo of FNN
chip. Table I shows its specification.
Fig. 5 Die photo of FNN chip.
Table I Chip specification
Process UMC 90nm 1P9M COMS
technology
Die Size 2.765mm × 2.765 mm
Gate count 1143539
Power Dissipation 10.3 mA
Operating Frequency 100Mhz
Power Supply 3.3v for I/O, 1v for core
IV. EXPERIMENTS
Due to the commercial or security demands, face
recognition has become one popular research topic in recent
years. To test the chip of FNN in classification problems,
the experiment tests face recognition. The flowchart of face
recognition is shown in Fig. 6.
Dimensionality reduction
face image simple set
DCT transformZig-Zag scan to 1-D vector and select
low frequency bandOutputFNN
Fig. 6 The flowchart of face recognition.
The ORL (http://people.cs.uchicago.edu/~dinoj/vis/orl/)
facial database is adopted. There are 400 facial images.
They include 40 classes and each has 10 facial images.
Each images is 92 × 112 with 256 gray levels. All pictures
are scaled to 46 × 56. The facial features (55 DCT
coefficients) are extracted and stored into embedded
SRAMs. Fig. 7 shows the learning curve. The vertical axis
represents the mean-square-error (MSE) of total patterns.
The total number of fuzzy rules is 23, and the recognition
rate is 90%.
621
![Page 4: [IEEE 2013 10th IEEE International Conference on Control and Automation (ICCA) - Hangzhou, China (2013.06.12-2013.06.14)] 2013 10th IEEE International Conference on Control and Automation](https://reader037.pdfslide.net/reader037/viewer/2022100205/5750abcb1a28abcf0ce22757/html5/thumbnails/4.jpg)
Fig. 7 The learning curve of FNN.
V. CONCLUSION
This paper proposes the chip design of FNN for face
recognition in mobile-robots. The generation of fuzzy rules
can be divided into linear discriminant analysis (LDA) and
Gaussian mixture model (GMM). In LDA, the weights are
updated by seeking directions that are efficient for
discrimination. In GMM, the parameter learning adopts the
gradient descent method to reduce the cost function. Since
LDA-derived fuzzy rules increase the discriminative
capability among different classes, the proposed FNN chip
can classify highly confusable patterns. Finally, the chip has
been fabricated in UMC 90nm technology. The experiment
of face recognition verifies that its function works well.
REFERENCE
[1] C. F. Juang, and C. M. Chang, “Human Body Posture Classification by a NeuralFuzzy Network and Home Care System Application,”IEEE Trans.Syst., Mam, Cybern., A, Syst., Hum.,vol. 37, no. 6, Nov. 2007
[2] C. Garcia and M. Delakis, “Convolutional Face Finder:A Neural Architecture for Fastand Robust Face Detection,” IEEE Trans. Pattern Analysis and Machine Intelligence, vol. 26, No. 11, Nov. 2004.
[3] R. J. Wai,and C. M. Liu,“Design of Dynamic Petri Recurrent Fuzzy NeuralNetwork and Its Application to Path-TrackingControl of Nonholonomic Mobile Robot,” IEEETran. on industrial electronics, vol. 56, no. 7, July 2009
[4] C. Quek, M. Pasquier, and B. B. Seng Lim, “POP-TRAFFIC: a novel fuzzy neural approach to road traffic analysis and prediction,”IEEE Trans. intelligent transportation systems, vol. 7, no. 2, June 2006
[5] J. S.Wang and C. S. G. Lee, “Self-adaptive neuron-fuzzy inference systems for classification applications,” IEEE Trans. Fuzzy Syst., vol. 10, no. 6,pp. 790–802, Dec. 2002.
[6] L. I.Kuncheva, “Howgood are fuzzy IF–THEN classifiers?,” IEEE Trans.Syst., Man, Cybern. B, Cybern., vol. 30, no. 4, pp. 501–509, Aug. 2000.
[7] H. Ishibuchi and T. Nakashima, “Effect of rule weights in fuzzy rulebasedclassification systems,” IEEE Trans. Fuzzy Syst., vol. 9, no. 4,pp. 506–5z15, Aug. 2001.
[8] G. D. Wuand P.H. Huang, “A Maximizing-Discriminability-Based Self-Organizing Fuzzy Network forClassification Problems,”IEEE Trans. Fuzzy syst., Vol. 18, No. 2, April 2010.
622










![[POSTER] Semantic Augmented Reality Environment with ...eprints.bournemouth.ac.uk/30318/1/ISMAR_Poster.pdf · augmented reality (ISMAR), 2011 10th IEEE international symposium on,](https://img.pdfslide.net/doc/110x75/5ece30576bbfcd2591178f6c/poster-semantic-augmented-reality-environment-with-augmented-reality-ismar.jpg)