Embed Size (px)
Citation preview
![Page 1: [IEEE 2013 IFIP Wireless Days (WD) - Valencia, Spain (2013.11.13-2013.11.15)] 2013 IFIP Wireless Days (WD) - Multi-path multi-channel data aggregation scheduling in wireless sensor](https://reader037.pdfslide.net/reader037/viewer/2022092907/5750a8601a28abcf0cc81c7b/html5/thumbnails/1.jpg)
Multi-Path Multi-Channel Data Aggregation
Scheduling in Wireless Sensor Networks
Miloud Bagaa∗, Mohamed Younis§, Adlen Ksentini‡ and Nadjib Badache∗
∗ Department of Theories and Computer Engineering, CERIST, Algiers, Algeria.
Emails:{bagaa,badache}@mail.cerist.dz§ Department of Computer Science and Electrical Engineering, University of Maryland Baltimore County.
Email:[email protected]‡ IRISA, University of Rennes 1, Rennes, France Email: [email protected]
Abstract—In-network aggregation is employed to cut on re-dundancy and conserve the network resources. To meet thecriticality and responsiveness goals, the aggregated data are tobe disseminated to the base-station reliably while reducing thedelivery latency. In this paper, a novel approach is proposed forReliable Multi-channel Scheduling for timely dissemination ofAggregated data (RMSA). RMSA strives to form an aggregationtree such that there are k disjoint paths from each node tothe base-station and finds a collision free schedule for nodetransmissions so that the aggregated data reaches the base-stationin minimal time. RMSA is a cross-layer scheme that intertwinesthe formation of the multi-path structure and the assignmentof transmission slots to the individual node with the objectiveof increasing the simultaneity of transmissions and reducing thebuffering delay. The availability of multiple radio channels isfurther exploited in order to prevent colliding transmissions andboost the overall network throughput. RMSA is validated throughsimulation and is shown to outperform previously publishedschemes.
Index Terms—wireless sensor network, data aggregation,scheduling media access, multi-path routing, multi-channels.
I. INTRODUCTION
Wireless sensor networks (WSNs) can be used in many
applications such as security surveillance [2]. Responsiveness
in these applications is very important in order to prevent harm
from being inflicted, e.g., damages caused by some intruders.
This requires careful management of the limited bandwidth
in order to increase the data throughput and reduce packet
delivery latency. In addition, like most WSNs operating in
inaccessible setups the sensor nodes operate on small batteries
and energy-efficiency has to be instrumented at all layers
of the communication protocol stack, most notably at the
link and network layers. The use of Time Division Multiple
Access (TDMA) is deemed effective for achieving these design
goals since it avoids medium access collisions among nodes
and thus reduces the data latency and energy consumed in
failed-transmissions and in idle-listening [3]. In-network data
aggregation helps in limiting medium access contention by
reducing the number of transmitted packets, and thus it can
enable timely delivery of data and facilitate finding low-latency
medium access schedule [4].
While time-based medium access scheduling and in-network
data aggregation have individually received lots of attention
from the research community, few solutions have been recently
proposed in literature to reduce the data latency by combining
the formation of the aggregation tree with medium access
scheduling [5] [4]. These solutions assume that a sensor node
uses only one channel to communicate with its neighbors.
However, the new generation of sensor nodes is equipped with
multi-channel radio transceiver, which allows them to com-
municate on multi-channels. For example Micaz is equipped
with a CC2420 transceiver that provides 16 non-overlapping
frequency channel. Exploiting the availability of multiple
channels would increase the simultaneous of transmission, and
hence reduce more the time latency.
However, the harsh conditions that the nodes operate in and
the limited on-board energy supply make them susceptible
to failure. Moreover, the wireless links often suffer from
interferences and packets may get lost before reaching the
base-station. Therefore, the failure of nodes and links is
an inevitable, which can reduce dramatically the quality of
the service provided by the WSN to the applications. To
mitigate the effect of link and node failures, few solutions have
been proposed in [9] [10]. These solutions employ multi-path
routing, such that each node has more than one parent while
forwarding the aggregated data towards the base-station.
In this paper, we pursue a novel cross-layer approach for
low-latency and reliable delivery of aggregated data in WSN.
Our approach, which we call RMSA, exploits the availability of
multi-channel links in order to minimize data delivery latency
and ensure data freshness. To mitigate the effect of link and
node failures, a multi-path routing topology is established
where each node can reach the base-station over k node-
disjoint paths. RMSA intertwines the formation of the multi-
path routing topology and the medium access scheduling
in order to minimize the buffering delay at the aggregation
nodes while ensuring the freshness of the data. Contemporary
schemes found in the literature pursue breadth-first ordering
when forming the aggregation tree, where a node in level Lwith respect to the base-station always sends its data to a node
(parent) in level L − 1. Unlike these schemes, in RMSA a
node that is L-hop away from the base-station (i.e., in level
L) selects its parents from nodes in levels L−1, L, and L+1and its time slot as the earliest one in all the channels.
978-1-4799-0543-0/13/$31.00 ©2013 IEEE
![Page 2: [IEEE 2013 IFIP Wireless Days (WD) - Valencia, Spain (2013.11.13-2013.11.15)] 2013 IFIP Wireless Days (WD) - Multi-path multi-channel data aggregation scheduling in wireless sensor](https://reader037.pdfslide.net/reader037/viewer/2022092907/5750a8601a28abcf0cc81c7b/html5/thumbnails/2.jpg)
The rest of the paper is organized as follows. Related
work is summarized in section II. The problem formulation
and the basic idea of our approach are presented in section
III. The approach details are provides in section IV. The
simulation results are discussed in section V. Finally, the paper
is concluded in section VI.
II. RELATED WORK
It is important to avoid mixing data from different periods
in periodic applications so that the data aggregation will
not degrade the accuracy of the assessment process. This
requirement is often referred to as data freshness and imposes
ordering and latency constraints on the aggregation tree. In
other words, the data reading sent from a node to its parent
on the tree should be aggregated with readings made in the
same sampling period. To ensure that the time slot at which
each parent in the tree transmits data must be later than that
of all its children. In addition to the energy savings achieved
by data aggregation, reduced latency and increased medium
efficiency are the most popular performance objectives. Chen
et al. proved that scheduling transmissions on an aggregation
tree in order to achieve minimum delivery latency is a NP-hard
problem [5]. They further proposed a centralized heuristic to
assign time slots to reduce the latency on a given aggregation
tree. On the other hand, Bagaa et al. [4] combined the tree
construction and nodes scheduling process in order to reduce
the delay.
Both solutions proposed in [5] and [4] do not support
multi-channel links when scheduling network nodes. In order
to further reduce the data delivery latency, the approaches
of [3], [6], [7], and [8] exploit the capabilities of emerging
multi-channel transceivers. In [8] network nodes are grouped
into clusters. The cluster heads are organized into tree to
aggregate and forward data from whole the network to the
base-station. To reduce the latency, the branches of the tree
are assigned different channels. Meanwhile, a Receiver-Based
Channel Assignment (RBCA) protocol is proposed in [3], in
which the children of the same parent use the same channel
to transmit their data. A Tree-Based Multi-Channel Protocol
(TMCP) is proposed in [7]. In TMCP, the aggregation tree
is subdivided into a set of sub-trees such that the root of
each of them is a neighbor of the base-station. To increase
the network throughput, each sub-tree is assigned a different
channel. On the other hand, in JFTSS [6] the links of the
tree are sorted such that the link which conflicts with the
most number of other links has high priority for channel
reassignment. However, RBCA, TMCP and JFTSS do not
ensure the aggregation freshness when scheduling network
nodes.
A major drawback for the solutions discussed above is
that they do not consider links and nodes failure, which can
significantly affect the data throughput. EMDC [9] and RTAD
[10] are recently proposed to deal with potential link and
node failures by forming multi-path aggregation topologies.
Nevertheless, both solutions assume that only one channel is
used when scheduling network nodes.
III. PROBLEM FORMULATION AND BASIC IDEA
The problem addressed in this paper is: given C channels
how to schedule all the network nodes without collisions so
that the sensor data are reliability delivered to the base-station
in minimal time. Each node is assumed to have one half-
duplex multi-channel transceiver such that it cannot transmit
and receive simultaneously and cannot hear two messages at
the same time, even on different channels. In other words, this
transceiver can use at most C channels, and at given time,
each node can use only one channel to transmit or receive
data. As proved by Chen et al. in [5], achieving optimal data
aggregation scheduling is NP-hard problem. Therefore, we
pursue heuristics to schedule network nodes’ transmissions.
Most of published solutions in the literature create tree
structure then schedule nodes transmissions by allocating slots
and channels, such that the collisions are prevented. Therefore,
if a node loses its parent, these solutions should be rerun to
connect whole network nodes with base-station and devise new
transmission schedule. Our proposed scheme overcomes this
limitation by forming k paths from each node to the base-
station. RMSA also opts to reduce time latency by increasing
the time slot reuse and by selecting for each node the earliest
time slot in all channels. Time slot reuse in this context means
that multiple nodes are able to transmit at the same time
without causing an interference at the receivers. Moreover,
in RMSA the formation of aggregation multi-path structure
and the medium access scheduling process are intertwined
in order to increase simultaneity among the transmissions.
For each node u, RMSA uses a subset of k neighbors of uto act as parents in order to simultaneously reach the next
hop on k distinct-paths. Let us denote by γ(u) and ρ(u)the set of neighbors and parents of node u, respectively (i.e.,
ρ(u) ⊆ γ(u)).
For each channel i the neighbors γ(u) of a node u can be
subdivided into three disjoint subsets according to a time slot
τ . The set δτi (u) of node u consists of nodes which are: (a) not
selected as parents at time slot τ on channel i, and (b) cannot
overhear other transmutations at this time slot using channel
i. Formally, each node in δτi (u) has at least one neighbor (i.e.,
scheduled node) which has already selected its parents, and
sets its time slot and its channel to τ and i, respectively; The
set τi (u) has nodes which are selected as parents by other
scheduled nodes at time slot τ and channel i. The neighbors
of nodes in this set are prevented from using τ on channel idue to collision. The set ϕτi (u) has the nodes which can be
selected as parents of node u at time slot τ on channel i and
can be formally defined as:
ϕτi (u) = γ(u)− (δτi (u) ∪ ξτ (u)
k⋃
j=1
τj (u)) (1)
such that ξτ (u) is the set of u’s neighbors which are (i)scheduled and (ii) their time slot is lower or equal to τ . We
remove ξτ (u) from ϕτi (u) in order to ensure data freshness
and prevent the creation of cycles. If τi (u) 6= ∅ or ϕτi (u) = ∅,
![Page 3: [IEEE 2013 IFIP Wireless Days (WD) - Valencia, Spain (2013.11.13-2013.11.15)] 2013 IFIP Wireless Days (WD) - Multi-path multi-channel data aggregation scheduling in wireless sensor](https://reader037.pdfslide.net/reader037/viewer/2022092907/5750a8601a28abcf0cc81c7b/html5/thumbnails/3.jpg)
node u should select a time slot that is higher than τ in order
to avoid introducing collision with nodes in τi (u).
In RMSA, to ensure the communication between a node uand its parents ρ(u) only one channel CHu and one time
slot TSu are sufficient. In order to increase the network
throughput, CHu and TSu should be selected such that the
time latency is reduced. To do that, TSu should be selected as
the earliest available time slot in all channels, whereas CHu
is the channel which allows more time slot reuse. While all
neighbors of u cannot receive another packet when u transmits
at time slot TSu on channel CHu, a node v ∈ (γ(u)− ρ(u))can transmit to a node w ∈ γ(v) at TSu on channel CHu as
long as w /∈ γ(u) and v is not neighbor of ρ(u). Moreover,
if v uses a channel different than CHu, it can transmit to any
node in w ∈ (γ(v)− ρ(u)) at TSu. RMSA takes advantage of
this observation to boost the simultaneity of transmissions, and
consequently minimize the data delivery latency, by increasing
the chance of finding u’s parents ρ(u) for which u can use a
smallest time slot.
IV. RELIABLE MULTI-CHANNEL SCHEDULING FOR
TIMELY DISSEMINATION OF AGGREGATED DATA (RMSA)
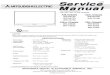
In order to facilitate the presentation of RMSA, Figure 1
will be referenced throughout the discussion. Figure 1 shows
a detailed example of RMSA execution using two channels
and for k = 2. In this figure, a dashed arrow between
two nodes a and b indicates that a has chosen b as one of
its parents when the arrow becomes solid it indicates that
the link (a, b) is scheduled. The dotted lines represent the
graph connectivity, i.e., the presence of a communication
link between a pair of nodes. The gray number besides the
dashed and solid arrow (a, b) represents a’s transmission slot.
The black number besides the dashed and solid arrow (a, b)represents a’s transmission channel.
A. Algorithm description
To reduce data latency, the time slot reuse should be
increased as much as possible. To do so RMSA addresses
the following issues: (i) how the nodes select their parents
in multi-path structure; (ii) how time slots and channels
are distributed over nodes, such that the time slot reuse is
maximized. In addition to CHu, TSu, ρ(u), γ(u), δτi , τi , ϕτidefined earlier, the following notation will be used to explain
RMSA:
• SCu: Set of u’s scheduled neighbors, i.e., the neighbors
which have already selected their parents and set their
channel and time slot,
• SCu: Set of u’s unscheduled neighbors i.e., the neighbors
which have not yet selected their parents. Formally,
SCu = γ(u)− SCu,
• T ji : Time slot j on channel i,• ηi: The node whose identifier is i,• ψi(u): The parents of node u on channel i,
1) Temporal ordering of transmissions: During the execu-
tion of RMSA, each node can be in one of the following three
states:
i) Unready state : a node in this state is not yet ready to
select its parent. Initially, all nodes except the leaves are
in an unready state. A node in this state is represented by
a gray circle.
ii) Ready state : a node in this state is ready to select its
parent. Initially, all leaf nodes are in this state. A node in
this state is represented by a white circle.
iii) Scheduled state : a node in this state has already se-
lected its parents and set its time slot and channel. Ini-
tially, all nodes are not scheduled. When RMSA completes
its execution all nodes except the base-station should be
scheduled. A node in this state is represented by a black
circle.
A non-leaf node in RMSA will not change its state from
unready to ready until all its neighbors in level L + 1 are
scheduled. Therefore, nodes in RMSA will be scheduled
bottom-up, level by level in a breadth-first order. Each node
in level L will not be ready until all its L + 1 neighbors
are scheduled. For example in Figure 1(a) η1, η2, η3 and
η4, which are in level 3 should be scheduled before nodes
η5, · · · , η11 in level 2. The scheduling of nodes in a breadth-
first order does not mean that the aggregated data is also
routed on a breadth-first tree.
2) Assigning parents and time slots: When a node u is
ready to schedule (i.e., whose state is ready), it should be
assigned CHu, TSu and ρ(u) which reduce the time latency,
ensure the aggregation freshness and maximize the time slot
reuse. To do so for each channel i we compute the earliest
time slot T τi that ensures the aggregation freshness and avoids
medium access collision. Formally, T τi is defined as the
earliest time slot in channel i which is higher than the slots
of all u’s children, and which ensures that τi (u) = ∅ and
ϕτi (u) 6= ∅. Moreover, a set of k parents ψi(u) for each
channel i are selected from ϕτi (u) which reduces the time
latency, and increases time slot reuse and network reliability.
To provide more flexibility in picking parents in ψi(u) that
meet the criteria above. In RMSA, the parents ψi(u) of a node
u, which is in level L, can be selected from levels L − 1,
L and L + 1, respectively. If u is an already-scheduled node
and w is one of its parents (w ∈ ψi(u)), all w’s neighbors
in SCw will be forbidden from using τ on channel i when
setting their schedule since ∀v ∈ SCw, τi (v) 6= ∅. If a node
selects parents which have the highest number of unscheduled
neighbors, many nodes will be prevented from using TSu in
subsequent iterations. In order to increase the time slots reuse,
for each channel the k parents ψi(u) should be selected such
that |⋃
w∈ψi(u)
SCw−({u}∪ψi(u))| is minimized and the fault-
tolerance goal is achieved. If there is more than k nodes in
(u) which fulfill the above conditions, the k parents ψi(u) for
channel i are selected as the ones whose ID is the smallest.
Obviously, if u’s node degree is less than k, all neighbors are
![Page 4: [IEEE 2013 IFIP Wireless Days (WD) - Valencia, Spain (2013.11.13-2013.11.15)] 2013 IFIP Wireless Days (WD) - Multi-path multi-channel data aggregation scheduling in wireless sensor](https://reader037.pdfslide.net/reader037/viewer/2022092907/5750a8601a28abcf0cc81c7b/html5/thumbnails/4.jpg)
3
2
1
1
2
3
4
56
7
8
9 10
11
1213
14
15
16
17
18
1:11:1
1:1
1:1
1:1 1:1
1:1
1:1
(a)
3
2
1
1
2
3
4
56
7
8
9 10
11
1213
14
15
16
17
18
1:11:1
2:1
2:1
2:1
2:1
1:1
1:1
(b)
3
2
1
1
2
3
4
56
7
8
9 10
11
1213
14
15
16
17
18
1:11:1
2:1
2:1
1:2
1:2
1:1
1:1
(c)
3
2
1
1
2
3
4
56
7
8
9 10
11
1213
14
15
16
17
18
1:11:1
2:1
2:1
1:2
1:2
1:1
1:1
1:2 1:2
1:21:2
1:21:3
1:3
2:1
2:1
1:3
1:3
1:2
1:2
(d)
3
2
1
1
2
3
4
56
7
8
9 10
11
1213
14
15
16
17
18
1:11:1
2:1
2:1
1:2
1:2
1:1
1:1
1:2 1:2
2:2
2:22:2 1:3
1:3
2:1
2:1
1:3
1:3
1:2
1:2
(e)
3
2
1
1
2
3
4
56
7
8
9 10
11
1213
14
15
16
17
18
1:11:1
2:1
2:1
1:2
1:2
1:1
1:1
1:2 1:22:2
2:3 2:3 1:3
1:3
2:1
2:1
1:3
1:3
1:2
1:2
(f)
3
2
1
1
2
3
4
56
7
8
9 10
11
1213
14
15
16
17
18
1:11:1
2:1
2:1
1:2
1:2
1:1
1:1
1:2 1:22:2
2:3 2:3 1:3
1:3
2:1
2:1
1:3
1:3
1:2
1:2
1:4
1:41:4
1:4
1:4
1:4
1:4
2:3
(g)
3
2
1
1
2
3
4
56
7
8
9 10
11
1213
14
15
16
17
18
1:11:1
2:1
2:1
1:2
1:2
1:1
1:1
1:2 1:22:2
2:3 2:3 1:3
1:3
2:1
2:1
1:3
1:3
1:2
1:2
1:4
1:4
1:5
1:52:4
2:4
2:4
2:3
(h)
3
2
1
1
2
3
4
56
7
8
9 10
11
1213
14
15
16
17
18
1:11:1
2:1
2:1
1:2
1:2
1:1
1:1
1:2 1:22:2
2:3 2:3 1:3
1:3
2:1
2:1
1:3
1:3
1:2
1:2
1:4
1:4
1:5
1:51:5
1:5 2:4
2:41:5
2:3
(i)
3
2
1
1
2
3
4
56
7
8
9 10
11
1213
14
15
16
17
18
1:11:1
2:1
2:1
1:2
1:2
1:1
1:1
1:2 1:22:2
2:3 2:3 1:3
1:3
2:1
2:1
1:3
1:3
1:2
1:2
1:4
1:4
1:5
1:5
1:61:6
1:72:4
2:4
1:82:3
(j)
Fig. 1: Detailed illustrative example to show how RMSA is applied
used as parents and reliability goal will not be met at that
node.
To increase the time slot reuse and also reduce the time
latency, CHu is set to be the channel i which offers the
earliest time slot T τi . If there is many channels which qualify,
CHu is picked as the one which enables the selection of
the parents ψi(u) with the fewest number of unscheduled
neighbors. If there is more than one channel which fulfill the
above conditions, CHu is set as the channel i which allows
the selection of the highest number of parents ψi(u) in order
to increase the network reliability. If there is more than one
channel which fulfill all the above conditions, the channel with
smallest ID will be selected. Meanwhile, ρ(u) and TSu will
be selected according to CHu value. ρ(u) and TSu are set to
ψCHu(u) and T τCHu
, respectively, in order to further enable
more simultaneity transmissions,
RMSA allows each node u to select its parents from sched-
uled nodes, i.e., {ρ(u)} ∩ SCu 6= ∅. From equation 1 a node
u in RMSA selects its parent w from ϕτi ∩ SCu if and only
if TSu < TSw, thus the data freshness is ensured and the
creation of cycles are prevented.
Figure 1(a) shows how node η2 choses CH2, TS2 and
ρ(2). We note that #11 (2) = ∅ and ϕ#1
1 (2) = {η7, η8, η9}.Therefore, slot #1 is the earliest available time slot on channel
1 that can be assigned to η2. Node η2 has to select two
nodes among its neighbors as parents ψ1(2) on channel 1 from
ϕ#11 (2). The choices are:
1) Nodes η7 and η9: If node η2 selects node η7 and η9 as its
parents ψ1(2) on channel 1, the number of unscheduled
neighbors that will be prevented from using the same
time slot is |SC7 ∪ SC9 − {η2, η7, η9}| = 11. Therefore,
if node η7 and η9 are selected as parents, eleven nodes
will be prevented from using time slot #1 on channel 1.
2) Nodes η8 and η9: If node η8 and η9 are selected as
parents, eight nodes will be prevented from using time
slot #1 on channel 1.
3) Nodes η7 and η8: Only 7 nodes will be prevented from
using time slot #1 on channel 1.
Obviously the best choice is {η7, η8} since it imposes the least
constraints and it is likely to enable the reuse of time slot #1on channel 1 and consequently reduce latency. For the same
reason in channel 2 the earliest available time slot that can be
assigned to η2 is #1 and its parents ψ2(2) = {η7, η8}. As the
two channels offer the same time slot, whose parents have the
same number of unscheduled neighbors and |ψ1(2)| = |ψ2(2)|,η2 selects the channel which has the smallest ID, which is 1.
Thus, CH2, TS2 and ρ(2) will be set to 1, #1 and {η7, η9},respectively.
Meanwhile, in Figure 1(b) #11 (3) = {η10}, which means
that the time slot #1 with channel 1 is reserved by the children
of η10, and if η3 uses this time slot on channel 1 a collision will
occur at η10. As #21 (3) = ∅ and ϕ#2
1 (3) = {η8, η9, η10}, the
earliest time slot that can be assigned to η3 on channel 1 is #2.
Also, it has to select two nodes among its neighbors as parents
ψ1(3) on channel 1 from ϕ#21 (3). The choice {η8, η9} prevents
7 nodes to use time slot #2 on channel 1, whereas the choices
{η8, η10} and {η9, η10} prevent only 6 nodes to use time slot
#2 on channel 1. Obviously the best choice are {η9, η10}or {η8, η10} . So, η3 has to choose between {η9, η10} and
{η8, η10}. As nodes in {η8, η10} have the smallest identifier
compared to {η9, η10}, ψ1(3) sets to {η8, η10}. In the same
Figure, #12 (3) = ∅ and ϕ#1
2 (3) = {η8, η9}, the earliest time
slot that can be assigned to η3 on channel 2 is #1 and its
parents ψ2(3) = {η8, η9}. As channel 2 offers the earliest time
![Page 5: [IEEE 2013 IFIP Wireless Days (WD) - Valencia, Spain (2013.11.13-2013.11.15)] 2013 IFIP Wireless Days (WD) - Multi-path multi-channel data aggregation scheduling in wireless sensor](https://reader037.pdfslide.net/reader037/viewer/2022092907/5750a8601a28abcf0cc81c7b/html5/thumbnails/5.jpg)
0
20
40
60
80
100
120
140
0 100 200 300 400 500 600
Nu
mb
er
of
slo
ts
Number of nodes(N)
EMDCRTAD
DAS-UTRMSARBCATMCPJFTSS
(a)
0
20
40
60
80
100
120
140
160
180
200
0 20 40 60 80 100 120
Nu
mb
er
of
slo
ts
Network density (ψ)
EMDCRTAD
DAS-UTRMSARBCATMCPJFTSS
(b)
0
20
40
60
80
100
120
140
160
180
0 2 4 6 8 10 12 14 16
Nu
mb
er
of
slo
ts
Number of channels
EMDC
RTAD
DAS-UT
RMSA
RBCA
TMCP
JFTSS
(c)
0
20
40
60
80
100
120
140
160
1 2 3 4 5 6 7 8 9 10
Nu
mb
er
of
slo
ts
Required number of parents (k)
EMDCRTAD
DAS-UTRMSA
(d)
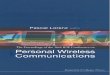
Fig. 2: Comparison of the data delivery latency of RMSA and the baseline approaches versus: (a) the number of nodes (N),(b) the network density (ψ), (c) the number of channels (C), and (d) the number of parents (k).
slot, CH3, TS3 and ρ(3) will be set to 2, #1 and {η8, η9},respectively. In both scenarios, η3 which is in level L selects
its parent ρ(3) from L− 1.
Figure 1(d) shows an example to illustrate the selection
of a parent of η9 from scheduled nodes and level L + 1.
As shown in Figure 1(d), ξ#1(9) = {η2}, #11 (9) = ∅,
ϕ#11 (9) = {η3, η11, η14, η15, η16, η17} and {η3, η15} have the
fewest unscheduled neighbors, η9 selects {η3, η15} as its
parents on T#11 . Note that, η3 is selected from the scheduled
nodes without creating cycle as shown in Figure 1(e).3) Scheduling the transmitting nodes: Assigning CHu,
TSu and ρ(u) to a ready node u does not mean that uis automatically scheduled as there might be another ready
node v and a collision would be created if both nodes
are scheduled simultaneously. Figure 1(a) shows the conflict
which can happen between nodes η1 and η2 if they are
scheduled simultaneously. Based on the parent selection and
time slot assignment procedure discussed above, we have: (i)ρ(1) = {η5, η6}, CH1 = 1 and TS1 = 1; (ii) ρ(2) = {η7,
η8}, CH2 = 1 and TS2 = 1. Therefore, if η1 and η2 are
scheduled simultaneously a collision will occur at η7 and η8.
RMSA resolves such a conflict by considering every pair for
ready nodes u and v in the level that is being scheduled. A
conflict exists between nodes u and v if one of the following
conditions holds:
1) A collision: If TSu = TSv and
a) ρ(u) ∩ ρ(v) 6= ∅ or
b) CHu = CHv and (ρ(u) ∩ γ(v) 6= ∅ or ρ(v) ∩ γ(u) 6=∅).
2) Violation of data freshness or creation of cycle: If both
u and v are ready nodes and u selects v as a parent or
the other way around, i.e., v ∈ ρ(u) or u ∈ ρ(v).
To resolve a collision, RMSA picks the one among the
two nodes u and v whose parents collectively have the
least number of unscheduled neighbors and reschedule its
transmission in order to enable the most reuse. In case of
a tie, the node, either u and v, that has the least number
of unscheduled neighbors will keep the earliest slot in order
to allow as many nodes as possible to be parent in this slot
with channel CHu, i.e., reduce the size of δTSu
CHu. In the case
both u and v, fulfill the above conditions, the node with the
smallest ID will be scheduled. Meanwhile, the violation of
data freshness or creation of cycles are resolved as follows:
If v ∈ ρ(u) or u ∈ ρ(v) then the node which has the earliest
time slot, say u, should be scheduled first. That is if node vsets u as one of its parents and v is scheduled first, node ushould change its time slot to be later than TSv in order to
ensure the data freshness. If TSu = TSv , the conflict will be
resolved using the same approach.
Coming back to the example in Figure 1(a), let us consider
η1 and η2. If η1 is scheduled first, the set #11 of the four
unscheduled neighbors of η1’s parents (i.e., SC5 ∪ SC6 −{η1, η5, η6} = {η7, η12, η13, η14}), will not be empty and will
be prevented from transmitting at T#11 . Moreover, two nodes
(i.e., γ(1)−ρ(1) = {η7, η8}) will be prevented from serving as
parents at T#11 . Assigning slot #1 to η2 makes {η7, η8} locked
and will disallow: (i) seven unscheduled neighbors (i.e.,
SC7∪SC8−{η2, η7, η8} = {η1, η3, η6, η12, η13, η14, η15}) to
transmit at T#11 and (ii) one node (i.e., γ(2) − ρ(2) = {η9}
) to serve as a parent. As η1 prevents less number of nodes
to use T#11 , η1 is to be allocated T#1
1 to transmit before η2.
Afterwards, based on the parent selection criteria discussed
above, η2 recomputes its CHu, TSu and ρ(u). As shown in
Figure 1(b), CH2 = 2, TS2 = 1 and ρ(2) = {η7, η8}. Then
scheduled as shown in Figure 1(c).
V. SIMULATION RESULTS
In this section, we validate the performance of RMSA using
simulation and compare it to that of DAS-UT [4], EMDC [9],
JFTSS [6], TMCP [7] and RBCA [3] and RTAD [10]. The
following metrics are used:
• Time latency (latest time slot): is defined as the time
required for the base-station to receive the aggregated
data from all sensor nodes;
• Robustness: This metric reports the percentage of nodes
that have k parents. Recall that RMSA strives to maintain
k paths to the base-station. However, it may not be
possible to do so since some nodes may have fewer
than k neighbors, and most importantly due to the fact
that fewer than k neighbors would be able to receive
a transmission as a result of the employed transmission
scheduling approach.
In the simulation experiments, we assume that all nodes
have the same transmission range. We generate a topology of
N nodes and network density ψ in a square area according to
a uniform random distribution. The algorithms evaluation is
![Page 6: [IEEE 2013 IFIP Wireless Days (WD) - Valencia, Spain (2013.11.13-2013.11.15)] 2013 IFIP Wireless Days (WD) - Multi-path multi-channel data aggregation scheduling in wireless sensor](https://reader037.pdfslide.net/reader037/viewer/2022092907/5750a8601a28abcf0cc81c7b/html5/thumbnails/6.jpg)
0
10
20
30
40
50
60
70
80
90
100
110
120
50 100 150 200 250 300 350 400 450 500 550 600
Robustn
ess
Number of nodes(N)
EMDCRTADRMSA
(a)
0
10
20
30
40
50
60
70
80
90
100
110
120
5 10 20 30 40 50 60 70 80 90 100 110
Robustn
ess
Network density (ψ)
EMDCRTADRMSA
(b)
0
10
20
30
40
50
60
70
80
90
100
110
120
1 2 4 6 8 10 12 14 16
Robustn
ess
Number of channels
EMDC
RTAD
RMSA
(c)
0
10
20
30
40
50
60
70
80
90
100
110
120
1 2 3 4 5 6 7 8 9 10
Robustn
ess
Required number of parents (k)
EMDCRTADRMSA
(d)
Fig. 3: Assessing the robustness of RMSA compared to the baseline approaches versus: (a) the number of nodes (N), (b) the
network density (ψ), (c) the number of channels (C), and (d) the number of parents (k).
performed by varying the number of nodes, network density,
the required number of parents k and the number of channels
C. We chose these metrics due to their impact on the time
latency and robustness. We conduct four sets of experiments:
(i) Vary N , and fix (i) ψ to 50, (ii) C to 8 and (iii) k to 5;
(ii) Vary ψ, and fix (i) N to 300, (ii) C to 8 and (iii) k to
5; (iii) Vary C, and fix (i) N to 300, (ii) ψ to 50 and (iii)k to 5; (vi) Vary k, and fix (i) N to 300, (ii) ψ to 50 and
(iii) C to 8.
As JFTSS, TMCP and RBCA do not meet the data freshness
requirement and in order to fairly compare RMSA with them,
we have slightly modified their implementations so that the
data freshness would be ensured. Basically, when the parent
node is ready to be scheduled, it is assigned a time slot later
than all its children. In our simulation results, each plotted
point represents the average of 35 executions. We plot the
95% confidence interval on the graphs.
A. Time latency
Figure 2 shows time latency as a function of N , ψ, C and
K. Time latency depends on the required number of parents
k, number of channels used by each node C, the flexibility in
choosing parents from the same, preceding and succeeding
levels, and the effectiveness of time-slot reuse mechanism.
When the value of k is high and/or value of C is low, the
size of δτi (u) and τi (u) will significantly grow, and then only
few nodes will succeed in reusing existing time slots. Although
RMSA uses multi-path structure, it outperforms all the baseline
solutions in term of data latency. RMSA has better results
due to: (i) intertwining the multi-path structure formation and
transmission scheduling; (ii) allowing nodes to select their
parents from three levels and from already scheduled nodes;
(iii) using multi-channels when scheduling network nodes.
B. Robustness
Figure 3 shows the percentage of nodes which select kparents as a function of N , ψ, C and k. All the nodes, in
DAS-UT, RBCA, TMCP and JFTSS, select only 1 (i.e., less
than k) parent. As shown in this Figure, in EMDC less than
%35 of nodes end up with k parents or more, whereas in RTAD
and RMSA more than 80% of nodes do so. This implies that
RMSA achieves high dependability.
VI. CONCLUSION
In this paper, we have presented RMSA which lowers the
data collection latency while taking into account possible
nodes and links failures. RMSA achieves its objective by: (i)intertwining the multi-path structure construction and nodes
scheduling, (ii) allowing each node to use more than one
channels so that an optimal time-slot and channel assignment
can be achieved, (iii) dissemination of sensor data over at
least k-node disjoint paths, (iv) employing criteria for parent
selection for nodes on the multi-path structure that maximize
time slot reuse. The simulation results have shown that RMSA
outperforms competing solutions in the literature with respect
to the number of nodes, the network density, the number of
channels and the required number of parents.
REFERENCES
[1] M. Rahimi, R. Baer, O. I. Iroezi, J. C. Garcia, J. Warrior, D. Estrin,and M. Srivastava, “Cyclops: In situ image sensing and interpretationin wireless sensor networks,” in In SenSys. ACM Press, 2005, pp.192–204.
[2] D. Dudek, C. Haas, A. Kuntz, M. Zitterbart, D. Krger, P. Rothenpieler,D. Pfisterer, and S. Fischer, “A wireless sensor network for bordersurveillance,” in Proc. of the 7th ACM Conference on Embedded
Networked Sensor Systems, Berkeley, 2009.[3] O. D. Incel, A. Ghosh, B. Krishnamachari, and K. Chintalapudi, “Fast
data collection in tree-based wireless sensor networks,” IEEE Trans.
Mob. Comput., vol. 11, no. 1, pp. 86–99, 2012.[4] M. Bagaa, A. Derhab, N. Lasla, A. Ouadjaout, and N. Badache, “Semi-
structured and unstructured data aggregation scheduling in wirelesssensor networks,” in INFOCOM, A. G. Greenberg and K. Sohraby, Eds.IEEE, 2012, pp. 2671–2675.
[5] X. Chen, X. Hu, and J. Zhu, “Minimum data aggregation time problemin wireless sensor networks,” in MSN, ser. Lecture Notes in ComputerScience, X. Jia, J. Wu, and Y. He, Eds., vol. 3794. Springer, 2005, pp.133–142.
[6] X. Lin and S. Rasool, “A distributed joint channel-assignment, schedul-ing and routing algorithm for multi-channel ad-hoc wireless networks,”in Proc. of IEEE INFOCOM, Anchorage, Alaska, May 2007.
[7] Y. Wu, J. A. Stankovic, T. He, and S. Lin, “Realistic and efficient multi-channel communications in wireless sensor networks,” in Proc. of IEEE
INFOCOM, Phoenix, AZ, 2008.[8] M. Younis and S. Bushra, “Efficient distributed medium access arbitra-
tion for multi-channel wireless sensor networks,” in Proc. of IEEE ICC,Glasgow, Scotland, 2007.
[9] H. V. Luu and X. Tang, “An efficient multi-path data collection schemein wireless sensor networks,” in ICDCS Workshops. IEEE ComputerSociety, 2011, pp. 198–207.
[10] M. Bagaa, M. Younis, A. Ouadjaout, and N. Badache, “Efficient multi-path data aggregation scheduling in wireless sensor networks,” in Proc.
of IEEE International Conference on Communication ICC, Budapest,Hungary, 2013.