Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003 1
Delay-BoundedPacket Scheduling of BurstyTraffic over Wir elessChannels
DineshRajan,AshutoshSabharwal andBehnaamAazhang
Abstract— In this paper, we study minimal power transmissionof bursty sourcesover wir elesschannelswith constraints on meanqueuing delay. The power minimizing schedulersadapt powerand rate of transmission basedon the queue and channel state.We show that packet scheduling based on queue state can beused to trade queuing delay with transmission power, even onadditivewhite Gaussiannoisechannels.Our extensive simulationsshow that small increasesin averagedelay can lead to substantialsavings in transmission power, thereby providing another avenuefor mobile devices to save on battery power. We proposea low-complexity scheduler that has near optimal performance. Wealso construct a variable rate QAM basedtransmission schemeto show the benefits of the proposedformulation in a practicalcommunication system.Power optimal schedulerswith absolutepacket delay constraints are also studied and their performanceis evaluated via simulations.
Index Terms— Packet scheduling, power control, queuing de-lay, traffic regulation, wir elesschannels.
I . INTRODUCTION
The current and future wireless systemswill support amultitude of serviceswith a wide range of delay, rate andreliability requirements.The task of delivering wide varietyof servicesis complicatedby the hostile time-varying natureof wireless channels.The limited battery resourcesat themobile devices add yet anotherdimensionin the challengeof reliable contentdelivery. Thus, it is imperative that meth-ods for wirelesstransmissionshouldbe designedto achievetargetdelayandthroughputwith minimal power consumption.Recognizing that transmissionpower is one of the majorbatteryconsumers1 in a mobiledevice, in this paper, we studythe tradeoff betweentransmissionpower and communicationdelay in wirelesschannels.
Delaying communicationbasedon channelconditions tosave transmissionpower is commonly usedin wirelesssys-tems. The transmissionschemewhich maximizeslong-termthroughput transmitsmore power and information in goodchannelstates,andlessin poor conditions[1]. Thus,it delayssomeparts of input traffic to wait for good channelstates,buying more utility for the available power resourcestoachieve the maximal long-term throughput.The informationtheoreticconceptof power andratecontrol is reflectedin theINFOSTATION [2] basedarchitecture,where mobile nodes
DineshRajan is with the Departmentof Electrical Engineering,SouthernMethodistUniversity, Dallas,TX. AshutoshSabharwal andBehnaamAazhangarewith the Departmentof Electrical andComputerEngineering,Rice Uni-versity, Houston,TX. This work wassupportedin partby Nokia Corporation,andby NSF undergrant0311398.
1In a typical TDMA phone,approximately60%of thebatteryconsumptioncanbe attributed to transmissionRF amplifier.
transmit data only when they are close to base-stations.Bywaitingfor extremelygoodconditions,moreor lessguaranteedby the proximity to base-stations,mobile devices ensurethattransmissionpower is most efficiently used.But the wait toreachcloseto base-stations(often sparselyplaced)canresultin large transmissiondelays.
In this paper, we addressthe problemof schedulingtrans-missionof packet dataover a time-slottedsingle-userwirelesslink. We incorporate queuing delay2 as one of our maindesign constraint. With a bound on mean queuing delay,our objective is to minimize the averagetransmissionpower.The inclusion of explicit delayconstraintis motivatedby theneedto supportapplicationswith differentdelay-sensitivities.The solution to the proposedformulation leads to methodswhich performpower andratecontrol, even in additive whiteGaussianchannels(AWGN), if the traffic is bursty. Note that,muchlike [1], rateandpower adaptationis donebasedon theGaussianchannelcoding theorem[3]; the relation betweeninstantaneousrateandpower is
��������� � ���� ��� � � � � ����� �The following example clarifies how the convex relationbetweenpower andrate leadsto reducedpower requirementsas the delay increases.
Consider the transmissionof an On-Off source over anAWGN channelwith noise variance � � ��
. The On-Offsourceproducespackets at a constantrate, � packets/time-slot, in the On state and no packets in the Off state. Letthe sourcearrivals be independentand identically distributedacrosstime. First, considera schemein which all packetsin the system are transmittedas soon as they arrive, theaverage power required to guaranteeerror free receptionequals��� ���� �"! #�� $ ��%&� �'(�)�� $ ��%&� *' (assumingthat �packets requiretransmissionat � bits/sec/Hz).Now, consideran alternatetransmissionschemewhich schedulespacketsasfollows. When there are
%� or more packets available,%� of
thosepacketsare transmitted(assuming� is an even integer)andtheremainingpacketsarebufferedfor futuretransmission.If the queuehaslessthan
%� packets,all packetsarebuffered.In thesecondtransmissionscheme,theaveragepowerrequiredis no less than �,+- � , which is lower than � � due toconvexity of exponential function ��. . The power savingsin the secondschemecan be attributed to increasedpacket
2There are many componentsthat affect the total transmissiondelay. Inthis paper we only considerqueuing delays. The delay due to encoding,propagationand decodingare assumedto be small and nearlyconstant,andhenceneglected.

2 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003
delayin the system.The above simpleexampleillustratestheaveragepowersavingsdueto powerandratecontrolcombinedwith queuingbasedcommunicationdelay. In the sequel,weformalize the joint power and rate control schemes,whichwe genericallylabel asschedulers, andderive minimal powermethodswith delaybounds.
The power gain from additionalcommunicationdelay wasindependentlyrecognizedin [4], and lazy packet schedulingwasproposedto reduceaveragepower consumption.Thoughrelatedin essence,our formulation differs considerablyfromthework in [4]. In [4], optimaloff-line andnearoptimalonlineschedulerswereproposedusingbothfinite andinfinite horizonoptimization.An indirectboundon packet delaywasimposedby requiringtheschedulerstransmitall packetsarriving in timeinterval / !103254 to departno later than 2 . Thus, the schedulerflushesthe queueevery 2 seconds.The emphasisin [4] wasto demonstratethat additional delay can help save power,henceno specific constraintson target delay were imposed.Schedulerssatisfyingexplicitly imposedpacket delayboundswere derived in [5], wherethe authorsfound minimal powertransmissionschemesfor a two-stateGilbert-Elliot channels.Though the work in [5] is closest to our formulation, theauthorsuseda more optimistic relation betweenpower andrate - the power was assumedto dependlinearly on the rate.As will becomeevident from the subsequentdevelopmentinthis paper, the gain due to additional delay in [5] is onlydue to channeltime-variation,and not the sourceburstiness.In [6], the authorsproposedynamicpower control policies intime-varying channelsunderenergy and threedifferentdelayconstraints;the optimal policies are basedon thresholdingreceived signal strengthand residualbattery energy. Again,thework in [6] notesthe impactof increasingdelayon energyefficiency but it differs considerablyfrom our formulation ofthe delay-constrainedtransmission.Power savings in fadingchannelswith additional delay has also been investigatedin [7], [8].
The main contributions in this paperareas follows:6 For AWGN channels,we completely characterizetheachievabledelay-power region for the setof randomizedstationaryschedulerswhich make their transmissiondeci-sionsbasedon queuestate.A randomizedschedulercantake one of several possibleactionsfor a given systemstatewith finite probability, andgeneralizesdeterministicschedulerswhich take thesameactionfor a givensystemstate.As thefirst importantresult,weshow thatfor delay-power characterization,deterministicschedulersform abasisof the set of randomizedschedulers.Throughoutthis paper, the analysisis performedfor finite buffer sizesystemswith no permissiblebuffer overflow.As anotherapplicationof the proposedformulation,wederiveoptimaldelay-boundedschedulersfor transmissionof constantrate traffic over finite-statefading channels.Dependingon the delay constraint,the schedulingdeci-sionsexhibit a mix of time water-filling [1] and outageminimizingpowercontrol[9]. If thedelayboundis small,the schedulertransmitspackets in poor channelcondi-tions like the outagepower control while the schedulerusesonly goodchannelstatesfor large delays.
6 The optimal power minimizing schedulerrequiresa dy-namic programmingbasedoptimization,which is com-putationallycumbersomefor large systems(sourceswithlargeburstsor systemswith largebuffer sizes).Basedontheempiricallyobservedpropertiesof the optimalsched-ulers, we proposea single-parameterscheduler, labeledlog-linear scheduler, with near optimal performance.The empirically observed near-optimal performanceofthe log-linear scheduleris used to derive an approxi-materelation betweenmeanqueuingdelay and averagetransmit power. The approximaterelation is found toaccuratelypredictthe performanceof optimal schedulersfor moderateto high delays.6 We show that similar results can be obtained if themeanqueuingdelay bound is replacedby an absolutedelay bound such that no packet suffers more than aprespecifiedmaximumdelay.6 To demonstratethe practicalapplicationof the proposedscheduling,we constructa convolutionallycodedvariablerate QAM system,andshow that small additionaldelaycan lead to substantialpower savings. In variable rateQAM systemswherethe transmissionrateandpower iscontrolledby the transmitter, the receiver is unaware ofthe transmittedrate.We show that the transmissionrateinformation (requiredfor appropriatedecoding)can bederived without requiringany protocol information.
All resultsin this paperassumeindependentand identicallydistributed packet arrivals in each slot for simplicity. Theanalysiscan be extendedto Markov arrival processeswhicharemoreappropriatemodelsfor multimediaapplicationslikevideo transmission.
The main resultsin the papercanbe attributedto inclusionof finite delay constraintsalong with a bursty traffic model.If delay is not a consideration,adequatequeuingdelay cancompletelyremoveall burstinessandstandardinformationthe-oretic analysisapplies[10]. The importanceof incorporatingtraffic modelin thedesignof wirelesscommunicationsystemshas been well recognized;for insightful reviews, see [11],[12]. The effect of queuing delay on probability of erroris studied in [13] using a simplified Gaussianmulti-accesschannelmodel.
In this paper, we study only single user systems andschedulepackets over time. Schedulingis more commonlyreferred to selectingpackets when there are multiple inputflows [14]; e.g., first comefirst serve (FCFS),last comefirstserve (LCFS), earliestdeadlinefirst (EDF) andweightedfairqueuing(WFQ). Thereis extensive work on schedulingoverwirelesschannels[15]–[19]. Again, the main idea is to effi-ciently usesystemresources,oftenwith anaim of fair divisionof resources.One of the interestingresults in this paper isthat efficient schedulingof packets helps even in a singleuser single flow system.In an actual wirelessnetwork, theproposedpacket schedulercanbe combinedwith a multi-flowservicediscipline,like WFQ, to achieve fairnesswith efficientpower usage.The single userproblemprovides methodsfortraffic regulation in circuit-switchedTDMA systems,and themultiuserproblemforms the basisfor schedulingin CDMAsystems.In our relatedwork [20], we focuson the multi-user

RAJAN ET.AL.: DELAY-BOUNDED PACKET SCHEDULING OF BURSTY TRAFFIC OVER WIRELESSCHANNELS 3
problem.In this7
paper, we focus on schedulerswhich do not dropor loose packets, and seekto minimize their averagepowerutilization. If the minimal power schedulerrequires morepower than available, then the transmitteris forced to droppackets.A power-limited outagebasedformulation is studiedin [21]–[23], whereweshow thatadditionaldelayhelpsreduceprobability of outage.
The restof the paperis organizedasfollows. In SectionIIwe introducethesystemmodelandsetup theschedulingprob-lem of interest.We provide a techniqueto find power efficientschedulersunderaveragedelay constraintsand discusssomeof their propertiesin SectionIII. Schedulingunder absolutedelayconstraintsis addressedin SectionIV. We demonstrateschedulinggains in a simple practical systemin SectionV.We concludein SectionVII.
I I . PRELIMINARIES AND PROBLEM FORMULATION
In this section,we introducethe time-slottedsystemmodelusedin the paper. We define the queue,sourceand channelmodel in Section II-A. Our emphasisin this paper is ondesign of schedulerswhich guaranteeinformation theoreticreliability, discussedin SectionII-B. Finally, a classof reliableschedulers,labeledzero outage schedulers is presentedandcharacterizedin SectionII-C.
A. SystemModel
We considera singleusertime-slottedsystemwith an inputbuffer, shown in Figure 1; the period of each time-slot isassumedto be 298 seconds.The sourceproducespackets atan averagerate of : packets/time-slot.In time-slot ; , thesourceproduces<>= packets, eachof size ? bits, where <>=has a distribution @ $ <>= ' with a finite support, / !A0 �B�C� 0BDE4 ,i.e., the largest numberof packets that arrive in a time-slotis D . The arrival processF*<G=,H is assumedto be independentand identically distributedfrom onetime-slot to another. Thearriving packetsarequeuedin theinputbuffer, which canstorea maximumof I packets.
Thenumberof queuedpacketsin thebuffer at thebeginningof the ;KJML time-slotaredenotedby N = . TheschedulerchoosesO = packets for transmissionat the beginning of the time-slot,and usespower � = for transmission.Sincethe length of thetime-slot is fixed, the rate of transmissionis variedbasedonthe selectednumberof packets, O = . Denotingthe transmittedsignalby PQ= , the received signal is given byR = �ES =�PQ= UT = 0 (1)
whereT = is the complex circularly symmetricadditive white
Gaussiannoisewith zeromeanandvariance� � . The channelgain
S = is assumedto be constantover the period of atime-slot, i.e., the coherenceinterval of the channel is thesameas the length of the time-slot.Two channelmodelsareconsidered:In the first model,
S =WV , thus the channel
model(1) reducesto a Gaussianchannel.In thesecondmodel,S = is assumedto be a finite stateMarkov channel,i.e.,S =
forms a Markov chain.Both the transmitterand receiver areassumedto have perfectknowledgeof the channelgain
S = .
Fig. 1. Schematicof Systemmodel
The transmittedsignal P = is a function of the numberof packets transmitted O = , the channel coding, modulationandwaveform used.We useinformationtheoreticallyoptimalcoding and modulationto obtain P = , which serves two pur-poses.First, we canget closedform relationshipbetweenO =andpower ��= neededfor reliabletransmission.Secondly, thepower we obtainservesasa universallower boundon powerrequiredby any schedulerdesignedfor a specificcodingandmodulationscheme.
At the transmitter, the buffer updateis given by
N =GX � �ZY\[^] $ N = < = � O = 0 I '_� (2)
Theaveragepacketdelayis relatedto theaveragebuffer lengthvia Little’s theorem[24] as follows,
` a�bdce� :f F"N�=,H 0 (3)
where : �gf F>< = H is the averagepacket arrival rate. Weassumethat all packets that arrive in time-slot ; can betransmitted only in time-slot
$ ; h*' or later. A naturalconstrainton O = is that !ji O = i Nk= , i.e., we cannottransmitmorepacketsthanavailablein thequeue.Thesmallestaveragedelayin the systemis achieved whenall bufferedpacketsaretransmittedin eachtime-slot,i.e., O = � Nk= , which impliesthat` a�bdcl� �m f FdN�=�H �n , assumingthat I ioD . In otherwords,the buffer is flushedat all time instants,and all packets aretransmittedin the slot immediatelyafter which they arrive.
A scheduleris a mappingfrom the currentbuffer stateN�=andchannelstate
S = to thenumberof packetstransmittedO =and transmitpower ��= (SeeSectionII-C for more details.).We will restrict our attentionto a classof schedulerswhichdo not dropany packet andachieve a predeterminedminimumreliability for every transmittedpacket;a schedulerwhich doesnot loseany packetsis labeledasa zero outage scheduler. Theobjective is to characterizethe achievabledelay-power regionwhich is definedas follows.
Definition 1 (Delay-powerregion): A point$ ` 0 � ' on the
averagedelayversusaveragetransmitpower planeis achiev-ableif thereexists a zerooutageschedulerwhich achievesanaveragedelayno greaterthan
`andaveragepower no greater
than � .The delay-power region can be characterizedby finding theminimal averagetransmitpower requiredfor any delay, overtheclassof all randomizedzerooutageschedulersp (formally

4 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003
definedin SectionII-C). Formally,
�lq $ `sr�'t� Yu[^]vwyx3z|{~},w1���[^Y=�� � f F*�,=,H 0 (4)
where` r
is theaveragepacketdelayboundand � q $ ` r*' is theminimum averagepower requiredto achieve averagedelaysno greaterthan
` r. Given the solution � q $ ` r*' , all points$ ` r 0 � ' such that � ��� q $ `sr�' belong to the delay-power
region.
B. Power Control
In this paper, we restrictour attentionto schedulerswhichguaranteea certain level of receptionreliability. Our notionof reliability is motivatedby the conceptof outageproposedin [25], wherea packet is reliably receivedif theinstantaneousmutualinformationis higherthanthe requiredrate.To invokemutual information basedreliability, we require that 2 8 issufficiently long to transmit D packets close to channelcapacity.
If the schedulerchoosesto transmit O = packets of length? bits in a time-slot of length 2 8 seconds,then the requiredtransmissionrateis given by ���C����C� �~� -������ nats/second.Using theresultsin [3], we definethe capacityfunction as
� $ � = 0 S = '(� 298?�^�*� ��� S = � � � =��� �1�*�d�*�C�|���B� [�Y � � � �^� � 0
(5)where,for simplicity, we have assumedthat the systemband-width is one Hertz. For simplicity, we also assume298 �? ����� � $ � ' . The quantity � $ � ' is the Shannoncapacity of aGaussianchannelwith noise variance � - ¡ � - and an averagepower of � = , andrepresentsthemaximumreliably achievablerate.Using(5), theappropriatepowercontrolto ensurereliablereception of packets follows immediately. To transmit O =packets, the schedulerselectsthe power ��= such that O = �� $ �,= 0 S = ' , leadingto the following power control,
� = $ O = 0 S = '(�� �� S = � �
$ � � � � *'�� (6)
Note that �,= is a strictly convex function of O = , a linearincreasein the number of packets requires an exponentialincreasein requiredtransmitpower.
The convex relation betweenrequiredtransmitpower andrate is also evident in the non-asymptoticregime, either byconsideringerror exponents[26] or finite length codes.Theerror exponent for Gaussianchannelsvaries logarithmicallyin power and linearly in rate. Thus, to guaranteethe sameerror performancefor all schedulerdecisionsO = , the requiredpower control will be similar to (6).
As an example of practical methods,consider a simpleuncodedsystem using ¢ -ary QAM modulation. For large( ¢£� �¤ ) rectangularQAM constellations,the averagepowerrequired to achieve a certain minimum distance betweenconstellationpointsis only marginally greaterthantheaveragepower requiredto achieve the sameminimum distanceusingthe bestknown QAM [27]. The constellationpointsaregivenby two-tuples
$~$M¥1¦ � � � ¢ '3§ 0 $M¥1¦ � � � ¢ '3§_' , for¦ � 0 ¦ � � 0 ¥ 0 �C�B� 0 ¢ . The transmissionrateis
¥ �^�*� � ¢ bits/symboland
theaveragetransmitpower � is�d¨ - ��©kX � �ª��©¬« � � © . Theminimum
distancebetweensignal points is given by¥ §
for all ¢ ,hencetheseconstellationsachieve approximatelythe samebiterror rate. Thus, increasingthe total information rate by afactorof ® will requirean averagetransmitpower of �s¢5¯ « � .Equivalently, increasingthe averagepower by a factor of ®gainsus an additionalbit rate of
¥ �^�*� � ® bits/symbol.Thus,the uncodedsystemsalso follow the exponentialrelationshipbetweentransmissionrateand transmitpower.
C. Zero Outage Schedulers
In its general form, we define a randomizedscheduler° as a memorylessprobabilistic mapping from the bufferstate N = and channel fading state
S = to the number ofpackets O = and transmissionpower � = , i.e., °²± $ N = 0 S = '&³´$ O = 0 ��= ' . Thus,a scheduleris characterizedby probabilities,Prob
$ª$ O = 0 ��= ' � $ N�= 0 S = '|' . Based on the discussionin Sec-tion II-B, the power �,= is a function of O = which reducesthemapping ° to a single dimensionalvariable, °µ± $ N�= 0 S = '¶³´O = . For the specialcaseof AWGN channel(
S =·V ), ° is
further reducedto °¸± N�= ³´ O = . For the sake of clarity,all resultsin this sectionare derived for the caseof AWGNchannelsand can be easily extended to finite state fadingchannels.
With some abuse of notation, we use °�¹ªº » to denotetheprobability of transmitting¼ packetsgiven that the queuehas½
packets, i.e., °,¹"º » � Prob$ O = � ¼ � Nk= � ½ '
. Thus, everyscheduler° canbe representedby an
$ I ¾�'C¿ $ I À�' uppertriangular matrix (since any schedulercannot transmit morepackets thanavailable in the buffer, thus °,¹"º » � ! for ¼jÁ ½ ),with entries °�¹ªº » . Since °,¹"º » areprobabilities,»
¹Ã �°,¹"º » �nG� (7)
The setof valid schedulerswill be denotedby Ä , whereeachscheduler°�Å Ä satisfiesthe above properties.
A scheduleris labeleddeterministicif °�¹ªº »uÅ F !10 H , i.e.,the schedulertakes the sameaction for eachqueuestateatall times. It follows immediatelyfrom the definition that thedeterministicschedulersform a subsetof randomizedsched-ulers.Later in this section,we will show that thedeterministicschedulersarea basisof the setof randomizedschedulers.
Sincethe sourceis assumedto be i.i.d. and the schedulersare assumedto be memoryless,all schedulerslead to thestationarity of N�= . Due to the memorylessnature of theschedulersthe queuestateforms a first order Markov chain,which we assumeto be aperiodic.Thus we have a conciserepresentationof thequeuestateprocessasfollows.DenotebyÆ � /�Ç ¹"º » 4 the matrix of transitionprobabilities,where Ç ¹"º » isthe probability of transitionfrom buffer stateN�= � ½ to bufferstateN =�X � � ¼ . Note that
Æis of size
$ I È*'A¿ $ I È*' andisnota functionof time index ; dueto stationarityof schedulers.The stationaryprobability of buffer state
½is denotedby É »
where, É » � Prob / N = � ½ 4 . Let Ê � /AÉ"�eÉ � É � �^��� É�Ë 4 � denotethe vector of stationaryprobabilities.From the definition ofÆ
and Ê , it follows that Æ Ê � Ê � (8)

RAJAN ET.AL.: DELAY-BOUNDED PACKET SCHEDULING OF BURSTY TRAFFIC OVER WIRELESSCHANNELS 5
Note thatÆ
dependson the choiceof ° , which implies Ê is afunctionÌ of ° . The averagepacket delayof any schedulercanbe expressedas
`saBbdc $ ° 'Í� :f / Nk= 4
� :
Ë»� �½ É » �
(9)
Similarly, the averagetransmissionpower � a�bdc is given by
� a�bdc $ ° 'Í� f /���= 4� Ë
»Î �»¹Ã � É
»Ï°�¹ªº » ��= $ ¼ 0 *' 0 (10)
where � = is the power control defined in (6). For a givenarrival process,more than one schedulercan have the sameaveragedelay and power; the following definition of equiva-lenceclassformalizesthis.
Definition 2 (Delay-powerequivalenceclass): Two sched-ulersaresaidto belongto theequivalenceclassÐÒÑKÓ º Ô Ó if theyhave the sameaveragedelayandaveragepower. Formally,
Ð Ñ Ó º Ô Ó � F °�±Õ°ÖÅ Ä 0 `saBbdc $ ° '¬�E` � 0 � a�bdc $ ° 't� � � H �Two schedulers,° � 0 ° � Å Ð Ñ Ó º Ô Ó are thensaid to be equiva-lent, andrepresentedby ° � V ° � .The importance of the above equivalence class definitionwill be becomeapparentin the next section.The followingexample illustratesthat the equivalenceclassesof the set ofall schedulerscanhave morethanoneelement.
Example 1 : The following two schedulersareequivalentfor
D � ¥.
° a � !×!Ø!! !Ø!!Ø! !!Ø!×! 0 °�Ù �
!Ø!×!! !×!!×! ×!×!Ø!×!
In this case, the two schedulers only differ inbuffer state 3 that occurs with zero probability.
In the rest of the paper, we will restrict our attention toa specialclassof schedulerswhich ensurea presetlevel ofreliability, formally definedas follows.
Definition 3 (Zero Outage Scheduler): A scheduleris saidto bezerooutageif packetsarenot droppedat the transmitter,thereareno buffer overflowsandpower ��= is chosento ensurereliable receptionof the packets. The set of all zero outageschedulersis denotedby p , i.e.,
p � F °�±_°ÀÅ Ä 0 ° is zerooutage� H (11)
The following propositioncompletelycharacterizesthe setofzero-outageschedulers,p .
Proposition4: Considera queuewith finite buffer size Iandan input processwith no more than D packet arrivals inoneslot.Assumethatthebuffer is initially empty. A stationarystochasticscheduleris zerooutageif andonly if for eachstateN = � ½ 0 ½ Å I � DE0 ���^� 0 I oneof thefollowing two conditionsaresatisfied.
1) Thestationaryprobability is zerofor state½, i.e., É » � ! .
2) If Ú ��Y\[�] Fd¼ ±_° ¹ªº »#Û� ! H denotesthe minimum num-ber of packets transmittedin state
½under the given
scheduler, then$ ½ � Ú ' i $ I � D ' .
Proof: SeeAppendixA ÜNow, we notethat the setof deterministicschedulersspans
the setof all randomizedschedulers,Ä , andhencea basisforÄ . Thebasiselementscanbeconstructedcolumnby columnasfollows.Considerthe
½ JML columnof ° . The$ ½ \*' 8 J elementto$ I �*' 8 J elementof the
½ JML columnarezero.Hence½
vectorsof dimension
$ I ·*' form the basisfor the½ JML column.The
basisvectorsare ! �C�B��! , ! ! �B�C�Ý! ,
�C�B�,
! �B�C��! ! �C�B��! wherein the last basis,the
isin the
½ JML position. Taking all possiblecombinationsof thebasisof all
$ I n*' columns,we get a basisfor the set ofall schedulers.An importantpropertyof all schedulersin Äwhich allows us to do this basisexpansionis (7). Finally, notethat the total numberof deterministicpoliciesis
$ I Z*'|Þ andall of themarenot zerooutage.
The setof deterministicschedulersform a redundantbasisfor the set of all randomizedschedulers,Ä , and henceanyschedulercanpossiblyhave multiple basisexpansions.Below,we give a constructive methodfor finding the coefficients ofthebasisexpansion,in termsof deterministicschedulers.Thisconstructive methodis usedin the proof of Theorem8. Let°ßÅ Ä be a given randomizedschedulerof size
$ I n*'à¿$ I á�' , andthe following stepsrecursively generatethe basisexpansionof ° .
1) Set½ �¸
and â » � F $ 0 ° ' H , where the ¼�JML memberof of â » is a two-tuple
$äã »�¹ 0Ïå »^¹ ' such that the firstelementof the tuple is the coefficient of the expansionand the secondelementof the tuple is the schedulerinthe expansion.Thus, the expansionin the first step is° � ã �ª� å �~� �n � ° . The following constructionupdatesthe numberandthe elementsin the set â » in eachstep,till all schedulersin the expansionaredeterministic.
2) In step½, we considereach elementof â » separately
andgenerate$ ½ ·*'
elementsfor â » X � . Thus � â » X � � �$ ½ ·*' � â » � .3) For eachå »�¹ , write it astheconvex combinationof
$ ½ e*'matricesthat differ only in the
$ ½ æ�' JML column. The$ ½ ¾�' JML columnof scheduler, å � » X � � ¹3ç where ¼>è � $ ¼ ��' $ ½ £*'tn 0 �B�C� 0 ¼ $ ½ £*' , has value 1 in row$ ¼>è �$ ¼ � �' $ ½ ¾*'~' andzeroin all otherrows, i.e., the½ ¾
differentcolumnsform a basisfor� » X � . Theschedulers
å � » X � � ¹3ç are identical to å »�¹ for all columnsother thancolumn
$ ½ é�'.
The coefficients are given byã � » X � � ¹ ç �ã »�¹ å »^¹ªº � ¹ ç «9� ¹ « � �~� » X � �ê�~� » X � � , where å »^¹ªº ë�ì is the element
in the í�JML row and îäJML column in å »^¹ . Sincescheduler° satisfies (7), the weighted sum of the schedulers
å � » X � � ¹ ç give the scheduler å »^¹ and all schedulers
å � » X � � ¹ ç satisfies(7).4) Set
½&ïW½ jandrepeattheabovesteps2-4 if
½¶ð I j .5) The elementsin â Ë X � give the basisexpansionof ° �� Ë X � �~ñ
¹Ã �ã Ë ¹ å Ë ¹ .
6 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003
Thebasisexpansiontechniqueis bestillustratedin thefollow-ing simpleexample.
Example 2 :
° � ! � ¥ ! �ä!×! � ò ! � ó! ! ! � ¤� ! � ¥
× ! �ä!×!ô! � ó!×!ô! � ¤ ! � ò
!ô! �ä! ! � ó!×!ô! � ¤� ! � ¥ ! �M
Ø×!Ø!×!!Ø!×!
! � ó× !!×! !×!×!
! � ¤× !!×!ô!!×! ! � ò ! �M
! ! !!×!Ø!
! � ó !ô!! ô!×!ô!
! � ¤ !×!! !!Ø!
We endthis sectionwith two propositions.In the next twopropositionswe considera queuewith finite buffer size I andan input processwith no morethan D packet arrivals in oneslot. Furtherdefinethe setof deterministicschedulers,õÍ� F °�±_°ÀÅ Ä 0 ° ¹"º » Å F !10 HAö ½ 0 ¼ � !10 0 �B�B� 0 I÷H 0andrecall that the setof zerooutageschedulersis denotedbyp . The following lemmashows that for every zerooutagede-terministicscheduler°ÀÅ Ð Ñ Ó º Ô Ó which satisfiesCondition1of Proposition4, thereexists anotherdeterministicschedulerø°ÖÅ ÐÒÑKÓ º Ô Ó which satisfiesCondition2 of Proposition4.
Proposition5 (Equivalentelementsof ÐÒÑKÓ º Ô Ó ): Let °ùÅÐÒÑKÓ º Ô ÓQú õ be a deterministic schedulersuch that thereexists a buffer state
½such that É » � ! . Then there exists a
deterministicschedulerø°�Å Ð Ñ Ó º Ô Ó¬ú õ suchthat
$ ½ � Ú ' i$ I � D ' where Ú �ûY\[^] Fd¼ ± ø°�¹ªº » Û� ! H �Proof: SeeAppendixB. ÜIn the next proposition,we show that in the basisexpansionof zero outage schedulers,only zero outage deterministicschedulerareneededandthecoefficientscorrespondingto thenon-zerooutageschedulersarezero.
Proposition6 (Basisexpansionof elementsin p ): LetF"ü » HCý»Î � representthe basisset of Ä , where ü »lÅ õ for all½and þ � � õ � is the cardinality of the set
õ. For any
stationaryrandomizedschedulerÿ Å p , let its expansionin
termsof basisvectorsbe ÿ � ý»� �ã » ü » where !Òi ã » i , and
ý»� �ã » � . Then,
ã » � ! for all ü » Å õ � p , whereõ � p
is the setdifference.Proof: SeeAppendixC. ÜThe following exampleillustratesthe resultsof propositions5and6.
Example3 : Considerthefollowing four schedulers(scheduler
° a and °�Ù aresameasin Example1, andreproducedhereforthe convenienceof the reader):
° ae� !Ø!×!! !×!!×! !!×!Ø!
° Ù � !Ø!×!! !×!!×! ×!×!Ø!×!
° � �× !×!!×!Ø!×!!×! !!×!Ø!
° ¨ � ! � � !×!!×! � ¤ !×!! ! !! ! !
It is easy to see that ° ¨ � ! � ¤ ° aÒ ! � � ° � . Now, if D �¥, then ° ¨ is zero outagebecauseit satisfiescondition 2 of
proposition 4. It is also easy to verify that ° a and ° � arezero outageschedulers.Again when D � ¥
, state½ �oó
haszero probability of occuranceunder scheduler° Ù . However,scheduler° a satisfiescondition2 of proposition4 andhasthesamedelayandpower asscheduler°�Ù .
The converseto proposition6 is however not true, i.e., aconvex combinationof two zero outagedeterministicsched-ulers is not always a zero outagerandomizedscheduler, asillustratedin Example4.
Example 4: Let ° Ù and ° � be as in Example3. Let D � ¥,
and
° � � !ô! ! !×!!×! !!×!ô!×!
Since É » � ! for buffer state 3 under scheduler ° � , it iszero outage.A convex combinationof ° � and ° � doesnotguaranteea schedulerwith zero outage.The probability ofbeing in buffer state3 is non-zerounder scheduler° � , andif we then switch to scheduler° � , we will remain in bufferstateN = �µó indefinitely andcontinueto loosepacketsduetobuffer overflow. Insteadaconvex combinationof schedulers°�Ùand ° � , will resultin schedulersthathave no buffer overflows.Note again that when D � ¥
, ° � and °�Ù have the sameaveragedelayandpower.
I I I . POWER EFFICIENT SCHEDULERS
In thissection,weprovideamethodto computetheminimalpower schedulerin (4). Driven by the high computationalcomplexity of solving for the optimal scheduler(using adynamic program), we proposetwo suboptimal schedulersin Section III-B. In SectionIII-C, we derive a closedformapproximationfor the averagepower as a function of delay.Extensionof theoptimalschedulersto fadingchannelis brieflydiscussedin Section III-D. Finally, we provide numericalresultsto illustratethesavings in power with increasingdelay,and state some empirically observed propertiesof optimalschedulersin AWGN andfadingchannels.

RAJAN ET.AL.: DELAY-BOUNDED PACKET SCHEDULING OF BURSTY TRAFFIC OVER WIRELESSCHANNELS 7
A. Optimal Packet Schedulers
We prove a lemmawhich is usedin theproof of Theorem8on convexity of setof randomizedschedulers.
Lemma7 (Delay-powerof 2 ‘almost’ identical schedulers):Let ° ¡ and °�� be two zero outageschedulerswhich areidentical in all columns except the
½ JML column. The delayand power of scheduler ° which is given by a convexcombinationof ° ¡ and ° � , equalsa convex combinationof the delays and powers of ° ¡ and ° � , respectively.In other words, if ° � ã ° ¡ $ � ã ' ° � ,
ã Å / !A0 4then
` a�bdc $ ° '¸� ã ç ` a�bdc $ ° ¡ '\ $ � ã ç '3`saBbdc $ ° � ' and� a�bdc $ ° ' � ã ç � a�bdc $ ° ¡ '� $ � ã ç ' � a�bdc $ °�� ' , where
!ji ã ç i . Further,
ã ç � ã É��� º »ã É � � º » $ � ã ' É �� º » 0where É �� º » and É � � º » arethestationaryprobabilitiesof beingin state
½underschedulers° ¡ and °�� respectively.
Proof: SeeAppendixD. ÜAn applicationof Lemma7 is givenin thefollowing example.
Example 5 : Let schedulers° a , ° � and ° ¨ be asin Exam-ple 3. For D � ¥
, anda uniform arrival distribution, thedelayand power under scheduler° a equals
` a�bdc $ ° a 'j��time-
slot and � a�bdc $ ° a 's� ¥ �� . Similarly,` a�bdc $ ° � 's��G� ó*ó time-
slotsand � a�bdc $ ° � '¬���1� ¥�� . Thestationaryprobabilitiesfor thedifferentstatesunderschedulers° a and ° � are / � � � !*4 and/ � � � � �� 4 . Note againthat ° ¨ � ! � � ° � ! � ¤ ° a . We find that
` aBbdc $ ° ¨ 'Í� ã ç ` a�bdc $ ° a 'k $ � ã ç 'Ï` a�bdc $ ° � '� G�Mdótime-slots
and
� a�bdc $ ° ¨ ' � ã ç � a�bdc $ ° ay'� $ � ã ç ' � a�bdc $ ° � '� óA� ó ¥
whereã ç � ��� ��������� ������ X ��� ������ � ! � ¤ .
By therepeatedapplicationof Lemma7 it is easyto seethatif we have more than 2 schedulerswhich differ in the samecolumn,thenthe delayandpower of the convex combinationof suchschedulersis given by the convex combinationof thedelaysandpowersof the individual schedulers.
The following theoremproves that the averagepower anddelay for an arbitrary zero outagerandomizedschedulercanbe obtainedas the convex combinationof delaysand powerof zerooutagedeterministicschedulers.
Theorem8 (Characterizationof delayand power):Consider a queue with finite buffer size I and an inputprocess with no more than D packet arrivals in oneslot. For any randomizedscheduler ÿ Å p , there exists
ã ç» Å / !A0 4 0 ½ �£ 0 ¥ 0 �C�B� 0 þ�è � � õ úup � , withý ç»Î �ã ç» �£ , such
that
` aBbdc $ ÿ 'Í� ý ç»� �ã ç» ` a�bdc $ ü » ' (12)
� aBbdc $ ÿ 'Í� ý ç»� �ã ç» � a�bdc $ ü » ' 0 (13)
where ü » is a schedulerand ü »(Å õ úup for all½.
Proof: SeeAppendixE. ÜThusthe averagepacket delayachievedby any zerooutage
randomizedscheduleris given by a convex combinationoftheaveragepacket delaysachievedby all possiblezerooutagedeterministicschedulers.In addition,the sameconvex combi-nationof the averagepowersof the zerooutagedeterministicschedulersgivestheaveragepower of zerooutagerandomizedpolicy.
In proposition 6, it was shown that every zero outageschedulerin p admittedanexpansionusingonly deterministiczero-outageschedulers.In theproof of Theorem8, it is shownthat amongthe several possiblebasisexpansionof ÿ Å p ,there is at least one which insuresdelay and power of ÿis a convex combinationof delay and power of somezerooutagedeterministicschedulers.The following lemmashowsa converseto this result, i.e., there exists schedulerswhichachieve delaysandpowerswhich arethe convex combinationof the delays and powers of any two arbitrary zero outagedeterministicschedulers.
Lemma9 (Converseto Theorem8): Let ° ¡ and° � be two zero outage deterministic schedulers withaverage delays
` a�bdc $ ° ¡ ' 0 `saBbdc $ ° � ' and average powers� a�bdc $ ° ¡ ' 0 � a�bdc $ ° � ' respectively. Then, there exists azero outage scheduler which achieves average delayã ` a�bdc $ ° ¡ ' $ � ã '3`saBbdc $ ° � ' and average powerã � aBbdc $ ° ¡ '� $ � ã ' � a�bdc $ ° � ' for all !ji ã i .Proof : SeeAppendixF. Ü
It shouldbe emphasizedthat the convex spanofõ úup is
largerthanp (someschedulersin convex spancanbenon-zerooutage).Giventhattherandomizedschedulerperformancecanbeobtainedby appropriatelinearcombinationof deterministicschedulers,the delay-power region can be characterizedasfollows.
Corollary 10 (Characterizationof delay-powerregion):The boundaryof the achievable region in the delay-powerplane is piecewise linear with the vertices achieved bydeterministicschedulers.Proof : The total numberof deterministiczerooutagesched-ulersis finite, andthedelay-powerperformanceof all random-ized zerooutageschedulersis givenby a convex combinationof delay-powerof deterministiczerooutageschedulers.Hencethe corollary follows. Ü
To find the achievable delay-power region, we use a dy-namic programmingtechniquecommonly known as ValueIteration Algorithm (VIA) [28]. The details of the VIA aregiven in AppendixG.
The delay bound` r
is reducedmonotonically and theminimal power deterministicpolicy is found among
õ ú pfor each
` r. Thus, insteadof solving (4), we are requiredto
8 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003
0 5 10 15 20 25 30 35 40 45 500
1
2
3
4
5
6
BUFFER STATE
NU
MB
ER
OF
PA
CK
ET
S T
RA
NS
MIT
TE
D
SCHEDULER 1
SCHEDULER 2
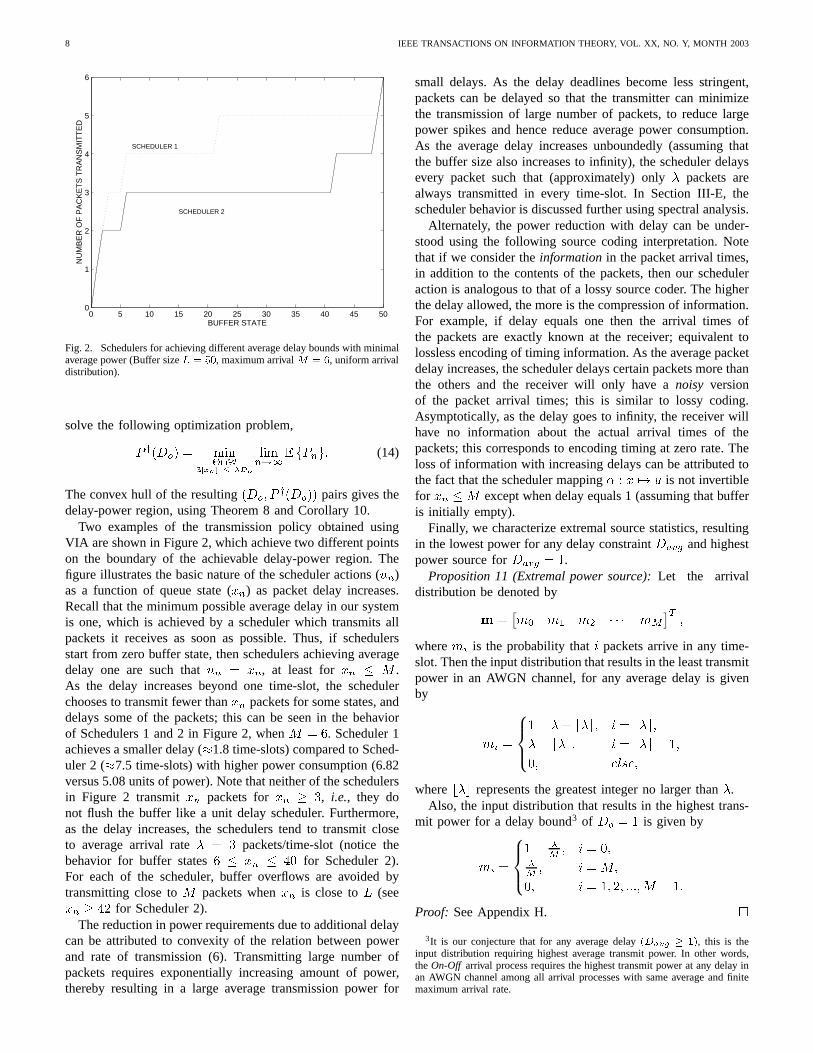
Fig. 2. Schedulersfor achieving differentaveragedelayboundswith minimalaveragepower (Buffer size � �"!$# , maximumarrival %&�(' , uniform arrivaldistribution).
solve the following optimizationproblem,
� ) $ ` r�'(� Yu[^]v+*�,-/. 0 ��1 }32dw ��^[�Y=G� � f F>��=,H � (14)
Theconvex hull of the resulting$ ` r 0 � ) $ ` r '|' pairsgivesthe
delay-power region, usingTheorem8 andCorollary 10.Two examplesof the transmissionpolicy obtainedusing
VIA areshown in Figure2, which achieve two differentpointson the boundaryof the achievable delay-power region. Thefigure illustratesthe basicnatureof thescheduleractions(O = )as a function of queuestate(N = ) as packet delay increases.Recallthat theminimumpossibleaveragedelayin our systemis one,which is achieved by a schedulerwhich transmitsallpackets it receives as soon as possible.Thus, if schedulersstartfrom zerobuffer state,thenschedulersachieving averagedelay one are such that O = � N�= , at least for N�= i D .As the delay increasesbeyond one time-slot, the schedulerchoosesto transmitfewer than N�= packetsfor somestates,anddelayssomeof the packets; this can be seenin the behaviorof Schedulers1 and2 in Figure2, when D �µ¤
. Scheduler1achievesa smallerdelay( 4 1.8 time-slots)comparedto Sched-uler 2 ( 4 7.5 time-slots)with higherpower consumption(6.82versus5.08unitsof power).Notethatneitherof theschedulersin Figure 2 transmit N = packets for N = � ó
, i.e., they donot flush the buffer like a unit delay scheduler. Furthermore,as the delay increases,the schedulerstend to transmit closeto averagearrival rate : � ó
packets/time-slot(notice thebehavior for buffer states
¤ i N = i � ! for Scheduler2).For each of the scheduler, buffer overflows are avoided bytransmittingclose to D packets when Nk= is close to I (seeN�= � � ¥ for Scheduler2).
Thereductionin power requirementsdueto additionaldelaycan be attributed to convexity of the relation betweenpowerand rate of transmission(6). Transmitting large number ofpackets requiresexponentially increasingamount of power,thereby resulting in a large averagetransmissionpower for
small delays.As the delay deadlinesbecomeless stringent,packets can be delayedso that the transmittercan minimizethe transmissionof large numberof packets, to reducelargepower spikes and hencereduceaveragepower consumption.As the averagedelay increasesunboundedly(assumingthatthe buffer sizealsoincreasesto infinity), the schedulerdelaysevery packet such that (approximately)only : packets arealways transmittedin every time-slot. In Section III-E, theschedulerbehavior is discussedfurtherusingspectralanalysis.
Alternately, the power reductionwith delay can be under-stoodusing the following sourcecoding interpretation.Notethat if we considerthe information in the packet arrival times,in addition to the contentsof the packets, thenour scheduleractionis analogousto thatof a lossysourcecoder. Thehigherthedelayallowed,themoreis thecompressionof information.For example, if delay equalsone then the arrival times ofthe packets are exactly known at the receiver; equivalent tolosslessencodingof timing information.As theaveragepacketdelayincreases,theschedulerdelayscertainpacketsmorethanthe others and the receiver will only have a noisy versionof the packet arrival times; this is similar to lossy coding.Asymptotically, asthe delaygoesto infinity, the receiver willhave no information about the actual arrival times of thepackets;this correspondsto encodingtiming at zerorate.Thelossof informationwith increasingdelayscanbe attributedtothefact that theschedulermapping°�± N ³´ O is not invertiblefor N�= i�D exceptwhendelayequals1 (assumingthatbufferis initially empty).
Finally, we characterizeextremalsourcestatistics,resultingin the lowestpower for any delayconstraint
a�bdcandhighest
power sourcefor` a�bdc �æ
.Proposition11 (Extremalpowersource): Let the arrival
distribution be denotedby
5 � 6 � 6 � 6 � �C�B� 687 � 0where
6 » is the probability that½
packetsarrive in any time-slot.Thentheinputdistributionthatresultsin theleasttransmitpower in an AWGN channel,for any averagedelay is givenby
6 » � � : :9 :�; 0 ½ �<9 :=; 0: � 9 :=; 0 ½ �<9 :=; · 0!10 � î É � 0
where9 :�; representsthe greatestinteger no larger than : .
Also, the input distribution that resultsin the highesttrans-mit power for a delaybound3 of
`sr �nis given by
6 » � � m7 0 ½ � !10m7 0 ½ � DE0!10 ½ �n 0 ¥ 0 �^��� 0BD � >�
Proof: SeeAppendixH. Ü3It is our conjecturethat for any averagedelay >@?�ACBEDGFIH$J , this is the
input distribution requiring highestaveragetransmitpower. In other words,theOn-Off arrival processrequiresthehighesttransmitpower at any delayinan AWGN channelamongall arrival processeswith sameaverageandfinitemaximumarrival rate.

RAJAN ET.AL.: DELAY-BOUNDED PACKET SCHEDULING OF BURSTY TRAFFIC OVER WIRELESSCHANNELS 9
B. SuboptimalSchedulers
For large buffer sizes I , the number of possible statesin the VIA increaseexponentially and hencecomputingtheoptimal scheduleris computationallyintensive. For the caseswherethe arrival distribution is measuredin real-timeandtheoptimal scheduleris adaptedover time, the implementationofVIA can leadto an intractabledesign.Motivatedby the highcomplexity of computing the optimal scheduler, we presenttwo suboptimal schedulersin this section. The suboptimalschedulerswe introducein this sectionare deterministic.Toobtain randomizedsuboptimalschedulers,we can again useconvexity propertiesof randomizedschedulers(Theorem8 andLemma9).
A simple method for complexity reduction is to reducethe number of states in the VIA (see Appendix G). Thefollowing statereductionis mostuseful for moderateto largedelay scenarios.As delay increasesbeyond 1, the schedulertends to take the sameaction in several consecutive queuestates.Thus, to reducethe statediagramsize,multiple statescan be morphedinto one state.For instance,for all statesN�= � ¼ 0 �C�B� 0 ¼ LK , the schedulercan be constrainedto takethesameaction O = , therebyreducingthestatespace.It is clearthat the constrainedsystemwill be suboptimal,but the lossdueto additionalconstraintscanbe minimizedby appropriatechoiceof thenumberandlengthsof constraintintervals;someguidelinesfor the choiceof the intervals canbe derived fromthe empiricalobservationsaboutthe optimal schedulersmadein SectionIII-E.
The secondsuboptimalscheduleris labeledthe log-linearscheduler, describedas follows. For a queuingdelay of onetime-slot the optimal scheduler4 flushesthe buffer at all time-slots, i.e., O = � N = and the correspondingpower requiredin each time-slot is proportional to � � � � . � � . As the delayincreases,we observe that the optimal schedulertends tochooseO = $ N = ' so that the power in eachtime-slot is linearlyproportionalto N�= , thereby“equalizing” the power penaltyinlargebuffer statesNk= . For equalizingthepower, the schedulerpicks packets O = $ N�= ' 4 ����� $ N�= ' . Combinedwith the naturalconstraintthatwe cannottransmitmorepacketsthanavailable$ O = i N�= ' , we proposethe following log-linearscheduler,
O = �µY\[^] $ Nk= 0 9ä�^�*� $NM N�= ' ; '_� (15)
The parameterM
of the log-linearscheduleris chosento meetthe delay bound.For buffer statesgreaterthan I � D , thelog-linearschedulertransmitsat least N = � $ I � D ' packetsto prevent buffer overflows. The log-linear schedulergreatlysimplifies schedulerdesignsinceit requiresonly one param-eter
M. The delayandpower usingthe log-linearscheduleris
calculatedusing (9) and (10), respectively. The delay-powerregionof thelog-linearscheduleris obtainedby monotonicallyincreasing
M. In all our simulations,thelog-linearperformance
is closeto the optimal schedulerperformance;further resultsaregiven in SectionIII-E.
ThevalueofM
to achieveacertainaveragedelaydependsonthearrival distribution of thesource.We now proposea simple
4Note that the optimal scheduleris not unique for %POQ� and if theschedulersstart from the zerobuffer state.
adaptivealgorithmthatcomputesthevalueofM
dynamicallytoachieve any given averagedelayconstraintbasedonly on theknowledgeof the meanarrival rate.In the adaptive scheduler,M = is a function of time and is updatedin every time-slot asgiven below. M = � M =y« � SRUT ø` = � ` � 0 (16)
whereø` = is thesampleaveragedelaygivenby theratio of the
sampleaveragebuffer lengthandarrival rate.Theperformanceof the adaptive scheduleris shown to numerically convergeto the performanceof a log-linear schedulerthat has fullknowledgeof arrival statisticsin SectionIII-E.
C. ApproximateDelay-Power Relation
In this section we derive an approximateclosed formrelationshipbetweenthe averagetransmit power, � a�bdc , andthe averagedelay
` a�bdcin an AWGN channel.The derivation
is basedon two simplifying assumptions:the packets areinfinitely divisible (fluid model) and the output distributionof the scheduleris Gaussian.The fluid model allows us todivide packets arbitrarily, and thus avoid the discretenatureof schedulerdecisions, which is a significant reason forintractabilityof closed-formanalysisof theoptimal scheduler.
As discussedin SectionIII-A, for large` a�bdc
, the optimalschedulertransmitsat ratescloseto averagearrival rate : ifbuffer overflows can be avoided.For large delays,the queuelength Nk= variesaroundtheaveragequeuelength
f FdN�=�H . Thescheduleraction, O = $ Nk= ' , can thus be approximatedaroundf F"Nk=,H by the following linear relation,O =U4WV�N�= WX�� (17)
For a stable system, the average arrival rate should equalthe averagedeparturerate and hence
f F O =,H � : . Takingexpectationson (17) we find V f / N = 4 � � X : . The slopeof the scheduler, V , at
f FdN = H is approximatedby the slopeoflog-linearscheduler, V �� � f FdN = H .
The varianceof the output process,O = , denotedby � � , iscomputedas follows. From (2,17),f / N � =�X � 4 � f / N � = 4 f / O � = 4 f /Î< � = 4 ¥ : $ f / N = 4 � : ' �¥ f / N = $ V�N = YXA' 4From stationarityof Nk= , f / N � =�X � 4 �Öf / N � = 4 andafter algebraicmanipulations,we canfind � �� as
� ��� � �a V¥ � V
� � �a¥ f / N = 4 � 0 (18)
where � �a is the varianceof the arrival processF*<G=,H . Usingthe Gaussianapproximation for the distribution of O =[Z\ $ : 0 � ��
', the averagetransmitpower is
f F>��=�H � ¥�] ����
�«�� ��=
$ O = 0 �' � «�^`_Ca2cb --Ed - _ § O = �
� � � � m X d - _- � � � � � m X d - xe/2dw�x3z|{ a - � $
from$ dò�'~'
4 � � � m X d - xe/2dw�x3z|{ � $for large : ` a�bdc_'

10 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003
Thus, �^�*� � � a�bdc��� � : � �a� : ` a�bdc (19)
The effect of random sourcearrivals is clearly highlightedin (19)by thefactor � - xm . Sourceswhich exhibit largevariationsin their arrivals comparedto their meanrate and are “more”bursty, have large � - xm . For more bursty sources,even smallincreasein
` a�bdcallows considerablepower savings; practical
examples of such sourcesinclude web and email traffic.Asymptotically, as
` a�bdc ´gf, the high delayapproximation
gives����� � Ô x3z|{
� -� : , which is the sameasthe Shannon
limit. As` a�bdc ´hf
, the randomarrivals of the sourcearecompletely smoothenedand hencewell known informationtheoreticanalysisapplies.
D. Schedulingin Fading Channels
In the precedingsections,we showed that time schedulingpackets from a source that producesvariable number ofpacketsevery time-slot resultsin significantpower reduction,evenin AWGN channels.An analogousproblemto schedulingdue to source burstiness is the one where scheduling isperformeddueto time-varying channelconditions.To furtheremphasizethe fact that channel time-variations lead to anon-trivial schedulingproblem under delay constraints,weconsidertransmissionof a constantrate sourceover a fadingchannel.5
Note that schedulingis equivalent to power control due toour emphasison reliablecommunication,andtheir relation isdefinedby (6). Power control in fadingchannelshasbeenanareaof active interest(see[29] for a review). We illustrate,by an example, that the proposedmethod of dynamicallychangingthe transmissionrate andpower, can lead to powersavings in finite statefading channelswith increasingdelay.For a delay bound,
` aBbdc � time-slot, packet scheduling
reducesto conventional power control. As the delay boundgoesto infinity, the delay-boundedschedulingleadsto maxi-mal mutual informationpower control [1].
For simplicity, we consider a 2-state fading channel inthe remainder of this subsectionalthough our results aredirectly applicableto any channelwith finite numberof states.Considera sourcethat producesconstantnumberof packetsevery time-slots,being transmittedover a two-statechannel,with
S = Å F 0 ! H and the transitionprobabilities2 betweenthe two channelstatesgiven by,
i � ! �j ! � ó! �ä ! � k 0 (20)
where 2 »Ïº ¹ is the probability of transitioning from channelstate
S = � ½toS =�X � � ¼ . The correspondingstationary
probabilities of being in the two channel states are 0.25(S = �n ) and0.75 (
S = �� ! ).At a delay of 1 time-slot, the channeltransmits25% of
the packets whenS = �¸
and the remainingpackets when
5This parallelsour previous discussionon transmissionof a bursty sourceover an AWGN channel.Preliminaryresultson bursty source-fading channelduality canbe found in [22].
S = �n ! . As thedelayincreasesto 4.7 time-slots,only 2% ofthepacketsaretransmittedwhen
S = �n , a savings of 9dB inpower over casewhendelayequals1 time-slot.As the delaytendsto infinity, the averagenumberof packetstransmittedineachstateis given by the time water-filling solution, and ischaracterizedin the following Proposition.
Proposition12 (Time water-filling): For a two-statefadingchannel,power minimizing transmissionrates, F"� � 0 ���_H , forthe two states,with no delayconstraint,aregiven by
� � � : ¥ @_� �^�*�S �S �
q 0��� � : ¥ @ � �^�*�
S �S �q �
Thestationaryprobabilityof beingin channelstate½
is denotedby @ » and
/ l » 4 q �mmon ½�p l » Á mmqnl » ½�p !ji l » i mmon �! ½�p l » ð !
Proof: Follows from (6) andstandardLagrangiantechniques.6Ü .Applying Proposition12 to the channelgiven above sug-
geststhat at infinite delay � � � ! and � � �r� . We seethatthesevaluesof � » arereflectedin thesmall fractionof packetsthataretransmittedin state
S = �� atadelayof 4.7time-slots.In practicalsystemsboththesourcearrival rateandchannel
state are time varying; hence scheduling becomesdoublyimportant. Our formulation is applicable,in straightforwardmanner, to the casewhereboth sourceand channelare timevarying. The power savings consistsof two components-one due to sourceburstinessand the other due to channelvariations.The total gain dependson the following factors:the extentof sourceburstiness� �a � : , the delaybound
` � , theamountof channelvariations� �� � f F � S = � � H , andthestationaryprobabilitiesof differentchannelstates.The larger the � �a � : ,moreis thesavingsin powerwith increasingdelaybecausethedepartureprocess,O = , is well smoothenedout. Analogously,the larger the � �� � f F � S = � � H , large difference between theSNRsof the two statesleadsto decreasedaveragepower withincreasingdelays.
E. NumericalResults
In this section,we presentnumerical results to study theperformanceof the proposedschedulers.We first comparethe performanceof the optimal schedulerwith the proposedsuboptimallog-linearscheduler, and the closedform approx-imation derived in Section III-C. Spectral analysis is alsoused to analyzethe behavior of the optimal and log-linearschedulers.An example for 4-state fading channel is alsopresented.Finally, wemakesomeempiricalobservationsaboutthe optimal schedulersbasedon our numericalsimulations.
The plot of the minimal transmissionpower versusaveragedelay boundis shown in Figure 3. For all delay-power pairs
6Thesevaluesof s�t arederivedassumingthatfractionallysizedpacketscanbe transmitted;packet integrity constraintmust be imposedon top of theseratevaluesto find integral transmissionrates.

RAJAN ET.AL.: DELAY-BOUNDED PACKET SCHEDULING OF BURSTY TRAFFIC OVER WIRELESSCHANNELS 11
above the solid curve, schedulersexists which achieve thatdelay and power. Also, no schedulercan guaranteedelaysand powers in the region below the solid line. Note that therequiredpower decreasesquickly as we relax the delay con-straintfrom oneto two time-slots.Thesubstantialreductioninpower for small increasesin delaybeyond one time-slot wasobserved in all our simulations.
To emphasizethe importanceof proposedscheduling,Fig-ure 3 also shows the performanceof the following constantpower scheduler,
O = � u if N = � u! if N = ð u 0 (21)
wherethevalueof u determinesthepoweranddelayachieved.The constantpower schedulereithersendsa fixed numberofpackets or nothing. Note that only certain valuesof u canguaranteezerooutage,andhencethe constantpower curve inFigure3 hasa step-like behavior. The differencebetweentheoptimal curve and constantpower curve gives an indicationof the gains in the proposedvariation of the transmitpowerbasedon the queuestate.
Also shown in Figure 3 is the minimum power requiredto transmit packets with no delay constraints,indicated asShannonlimit on the plot. For AWGN, the Shannonlimit isgiven by
� � L a =>= r = � � � $ � : :9 :�; ' $ ��v mqw � *'|$ : � 9 :=; ' $ � v mow X � � *'
Thus,asdelayincreasesunboundedly, the Shannonlimit isachieved by the policy which transmitseither
9 :=; or9 :�; ·
packetsin eachtransmission,with probabilities$ � : :9 :�; '
and$ : � 9 :=; ' , respectively.
The excesspower required by delay boundedschedulersover the Shannonlimit is an indication of the loss due tofinite delay requirements.As expected,the power requiredby the delay-boundedschedulingapproachesthe Shannonlimit as the delay increases.From Figure 3, which is in-dicative of the typical performancewe obtained,we observethe encouragingresult that the rate of convergenceto theasymptoticlimit is fairly fast. We briefly note the fact thatto achieve arbitrarily large delays, the buffer size shouldbe increasedaccordingly, which directly follows from (9).However, large amountof buffering may not be requiredinpractical systems,to achieve significant reduction in powerconsumptionby traffic smoothening,becausethe delay onlyneedsto increaseto around 2 time-slots.The fourth curvein Figure 3 shows the averagepower versusaveragedelayperformanceof the schedulerwith absolutedelayguarantees,derived anddiscussedin SectionIV.
Our schedulerformulation which boundsaveragedelays,doesnot dependon the order in which packets in the bufferare serviced.So, FCFS and LCFS have similar power re-quirementsfor the sameaveragedelay bounds.However thedistribution of actualdelaysexperiencedby thepacketsshowscompletelydifferentcharacteristicsin FCFSandLCFS basedschedulers.For example,to achieveanaveragedelayof 2 time-slotsusingFCFSpolicy, the distribution of packet delayswas
1 2 3 4 5 6 7 84
6
8
10
12
14
16
18
20
22
24
AV
ER
AG
E P
OW
ER
AVERAGE DELAY LIMIT
UPPER BOUND
CONSTANT POWER ABSOLUTE DELAY − OPTIMALAVERAGE DELAY − OPTIMAL SHANNON LIMIT
Fig. 3. Achievable delay-power region for AWGN channel.The pointsmarked by x representthe lowest averagepower achievable underabsolutedelay boundsof 1, 2 and 3 time-slots (For all plots buffer size �x�I!$# ,maximumarrival %y�"' , uniform arrival distribution).
almostuniform andhada small range.In contrast,with LCFS,the distribution of delaywashighly skewed; large numberofpacketsexperienceda delayof 1 time-slotwhile a few packetsexperienceddelaysgreaterthan900 time-slots.
The performanceof the log-linear and adaptive log-linearschedulersare comparedwith the optimal schedulerin Fig-ure 4. The proposedlog-linear schedulerperformedclose tothe optimal schedulerin all our simulations,therebyverifyingthe “equalization” intuition behind the log-linear scheduler.For theadaptive log-linearperformanceshown in Figure4, wechoosethe parameters
R T � ! � !�! andinitial valueforM = asM � � � �ÑKÓ . Thepower-delayperformanceis plottedafter10,000
time-slots.From Figure 4 we find that the proposedadaptivelog-linear schedulerachieves near optimal performancebyusingonly knowledgeof averagearrival rate.In mostcaseswefoundthat theadaptive
Mreacheswithin
�zof theasymptotic
value in 500-2000samplesdependingon the averagedelaybound
` � .The traffic smootheningeffect due to increasing delay
can be seen in Figure 6. In Figure 6, the power spectraldensityof the arrival ( F>< = H ) and departure( F O = H ) processesis shown. Sincethe arrival processis assumedto be i.i.d. itspower spectrum is white. The smootheningeffect due tobuffering is evident from the low-passnatureof the powerspectrumof theoutputprocess.We observedthat,asthedelayincreases,the bandwidthof the departureprocessdecreases.In essence,the optimal scheduleracts like a low-passfilter.In contrast,in a fading channel,when the arrival processisconstantrate (power spectrumis a delta function), the outputprocessfrom the queueis variableand hashigher frequencycomponents[22].
Finally, in Figure 5, we comparethe large delay approx-imation (19) with the performanceof the optimal scheduler.The axesin Figure5 are
�^�*� $ tÒf F*� = H ' and � f F ` = H . The
arrival distribution was assumedto be uniformly distributedbetween / !A0 ¤ 4 with mean3 packets per time-slot. The high

12 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003
1 2 3 4 5 6 75
5.5
6
6.5
7
7.5
8
8.5
9A
VE
RA
GE
PO
WE
R
AVERAGE DELAY BOUND
OPTIMALLOG−LINEARADAPTIVE LOG−LINEAR
Fig. 4. Comparisonof log-linear and adaptive log-linear schedulerswithcorrespondingoptimal scheduler(Buffer length �{�3!$# , maximum arrival%|�"' , uniform arrival distribution).
delayapproximationwasderived with an assumptionthat thedeparturetraffic is Gaussian,an assumptionwhich is leastapplicablefor low delays.For small delays,the transmittedpower is dependenton the input distribution, and henceGaussiandistribution basedhigh delay approximationhas alarge error in this delay regime. But for large averagedelays(beyond2 time-slots),theoptimalschedulerfollows the lineartrend, as predictedby the high delay approximation.In fact,due to smootheningeffect, the effect of input distribution isminimal for moderateto large delays.
An example of the scheduleraction for a 4-statefadingchannelwith constantrate traffic is shown in Figure 7. Thechannelamplitudesin different statesare
S = Å F ¥ 0 � 0 ¤ 0 ! H .The transition probabilities betweenthe different statesaregiven by
i � ! � ¤ ! � ¥ ! �ä ! �ä! �ä ! � � ! �ä ! � �! �ä � ! �ä � ! � ¤ ! �ä! �ä ! �ä ! �ä ! �j �
(22)
The lowest curve in Figure 7 correspondstoS = � ¥
andthe highest to
S = � ! . The time water-filling nature ofthe scheduler, for finite delays, follows from the Figure 7.The scheduleralwaystransmitsmorepacketsin goodchannelstates,and lessin poor channelconditions.
Basedon our numericalstudy, we statesomeempiricallyobserved propertiesof the optimal deterministicschedulers.
1) In an AWGN channel,O = is a non-decreasingfunctionof N�= ,i.e., more packets are transmitted when thereare more packets in the buffer. In fading channels,conditionedon eachstate
S = , O = is a non-decreasingfunction of N�= .
2) In an AWGN channel,the optimal scheduleris workconserving,i.e., O = � !�} N = � ! . In a fadingchannel,we foundsituationsin which theschedulerwasnot workconserving.For large delay bounds,if
S = in the badchannelstateis muchworsethanin goodstate,O = was
zerowhen N = wasnon-zeroandthe channelwasin thebadstate.This scheduleractionin fadingchannels,is inconformationwith time water filling solution obtainedby maximizingmutualinformation[1] to achievehighestpossiblelong-termthroughput.
3) In an AWGN channel,amongall deterministicsched-ulers,the increasein O = is lessthanor equalto increasein Nk= . In other words, for all <jÁ ! and N�= , � O = $ N�= < ' � O = $ N�= ' � i < . This propertyis reflectedin the factthat O = only increasesin incrementsof 1 for eachunitincrementin buffer size.
4) In an AWGN channel,the maximumnumberof packetstransmittedin any time-slotequalsthemaximumnumberof arrivals in onetime-slot, i.e., O = i�D .
5) In a finite statefading channel,for a fixed buffer statemorepacketsaretransmittedin channelwith higher
S = ,i.e., for a fixed N = , O = is a non-decreasingfunction ofS = .
6) In an AWGN channel,we observed that the entropyof departureprocessF O =�H was higher, lower or equalto entropy of arrival processF><>=�H dependingon delay,power andarrival distribution.
6 When delay bound equals1, O = � < =y« � and soarrival anddepartureprocesshave sameentropy.6 When delay boundasymptoticallygoesto infinity,O = � : and so entropy of departureprocessisasymptoticallyzerowhich is lower thanentropy ofa bursty arrival process.6 ConsideranOn-Off arrival processwith probabilityof beingin On stateequalto ~ , so its entropy equals� ~ ����� $ ~ ' � $ � ~ 'G����� $ � ~ ' . We observed thatfor this arrival process,and delaysslightly higherthan1, thedepartureprocesshasentropy higherthanarrival process.The entropy increasingpropertyofcertainqueuingsystemsis investigatedin [30].
The propertiesin AWGN channels,are supportedby Fig-ure2. Thepropertiesfor fadingchannelsareempiricallyclearfrom Figure 7 which shows the scheduleraction O = as afunction of N�= and
S = .
Recall that in our system we have assumedall packetsto be of fixed size and indivisible, i.e., whole packets haveto be transmittedcompletelywithin one time-slot. Note thatif fractional packets can be transmitted in any time-slot,then the power required can be further lowered comparedto the proposedlimits. The potential power reduction intransmitting fractional packets is easily verified for largedelayswhen averagearrival rate : is not an integer, say 3.5packets/time-slot.If packetsarenot divisible theShannonlimitis ! � � � � � � � � � . In contrast,when fractionalpackets canebe transmitted,the Shannonlimit is given by� � � � � � , which is lower thanthe onewith no fractional-ization,againdueto theconvexity of theexponentialfunction.Preliminary results on schedulingwith fractionalizationaregiven in [22].

RAJAN ET.AL.: DELAY-BOUNDED PACKET SCHEDULING OF BURSTY TRAFFIC OVER WIRELESSCHANNELS 13
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 13
3.5
4
4.5
5
5.5
1/AVERAGE DELAY
LOG
(1+
AV
ER
AG
E P
OW
ER
)
OPTIMAL SCHEDULER HIGH DELAY APPROXIMATION
Fig. 5. Plot of logarithmof averagepower versusinverseof averagedelay(Buffer length ���"�$!$# , maximumarrivals %&�"' ). The actualpowersanddelaysarecomparedto high delayapproximation(19).
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−20
−15
−10
−5
0
5
10
FREQUENCY
PO
WE
R S
PE
CT
RA
L D
EN
SIT
Y
INPUT SPECTRUM OPTIMAL OUTPUT − LOW dELAY OPTIMAL OUTPUT − HIGH DELAY LOG−LINEAR OUTPUT − LOW DELAY
Fig. 6. Power spectraldensity of input and output processfor differentdelays(Buffer length ���"! , maximumarrivals %&�(' , uniformly distributedarrivals).Delaysof outputprocessare2.2 time-slots(low delay)and7.9 time-slots(highdelay).
IV. SCHEDULERS GUARANTEEING ABSOLUTE DELAY
BOUNDS
For the systemsusingschedulerswhich boundthe averagepacket delay, theactualdelaysufferedby a packet dependsontheserviceorder, likefirst comefirst serve(FCFS)or lastcomefirst serve (LCFS), and can be potentially unbounded.Largepacketsdelaysarehighly probablein fadingchannels,wherethe scheduleris not guaranteedto be work conserving.Fordelay-sensitive multimediaapplicationslike streamingvideo,boundedpacket delaysare essentialto maintain appropriatequality of service.In this section,we derivepower minimizingzerooutageschedulerswith a boundedabsolutepacket delay.
A. ProblemFormulation
Schedulersdesignedaccordingto the averagedelay con-straint (4) are not constrainedto be work conserving.How-ever,(as statedin Section III-E) in all our experiments,theoptimalschedulerwaswork conservingfor Gaussianchannels.Thus, with FCFS service discipline, no packet will sufferarbitrarily largedelaysin theaveragedelayoptimalscheduler,which implies that the buffer size, I , is a trivial boundon theabsolutepacket delay. Thus,limiting theclassof schedulerstothe setof FCFSwork conservingschedulerscould potentiallybe usedto obtain schedulerswith absolutedelay guarantees.We study an alternateapproach,in which the systemknowsthearrival time-stampof eachpacketandusesthatinformationto makes its schedulingdecisions.
With the knowledgeof packet time-stamps,the stateof thequeuenot only includesqueuelengthbut alsocompletetiminginformation of the queuedpackets. We state without proofthat an averagepower minimizing scheduler, with boundedabsolutedelay
` a Ù 8 , doesnot needinformationaboutpacketarrivals
`sa Ù 8 È or moreslotsprior to thecurrentslot.7 Thus,defining the state of the queue �&= as a
` a Ù 8 -dimensionalvectorsuffices,
� = � F $�� � º = 0 � � º = 0 �^��� 0 � Ñ xE� � º = ' ± ! i � »Ïº = i D H 0 (23)
where� »�º = representsthenumberof packetsthatarrivedduring
the$ ; � ½ ' JML slot thathavenotbeentransmittedbeforetime-slot; . We assumea FCFSservicedisciplineandfind the number
of packetsto be transmitted,O = , to be a functionof ��= . Notethat the total numberof queuestatesin the systemis givenby$ D £*' Ñ xE� � . Similar to our treatmentof averagedelay
boundedschedulers,all queuestatesmight not have finiteprobability of occurringdependingon the scheduleraction.
If the buffer length I is greaterthan$ D £*'Ï` a Ù 8 then
any schedulerwhich guaranteesabsolutedelay bound` a Ù 8
will have no buffer overflow. If I ð $ D �*'Ï` a Ù 8 , necessaryand sufficient conditionsfor zero buffer overflow similar toSection II-C exist and henceare not statedhere. Since theclassof zero outageschedulersis smaller for the case I ð$ D È*'3` a Ù 8 thanfor thecaseIZ� $ D È*'3`sa Ù 8 , theaveragepower requiredby a schedulerwith the same
` a ٠8 will begreaterin the first caseas comparedto the latter. We willassumeI�� $ D o*'3` a ٠8 throughoutthe remainderof thissection.
The set of all schedulerssatisfying absolutedelay bound` a Ù 8 is denotedby � $ ` a Ù 8 ' . The optimizationproblemanal-ogousto (4) canbe expressedas,Y\[�]� � Ñ xC� � � ��[^Y=�� � f /Î��= 4 0 (24)
where§�� a . representsthe maximum delay experienced
amongall packets.
B. Optimal Schedulerand its Properties
Like in SectionIII, O = canbe a deterministicor a random-ized stationaryfunction of � = . In SectionIII-A, we proved
7Intuitively, if a schedulersguaranteesall packets leave within ? A/��� time-slotsof their arrivals, during any time-slot � the numberof bufferedpacketswhich arrived earlier than time-slot ����? A/��� ��H equals0.

14 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003
that the verticesof the delay power region are achieved bydeterministicschedulers.Sincepacketscannotbe divided andtransmitted,all possiblevaluesof
` a Ù 8 have to be positiveintegers,i.e.,
` a Ù 8 Å8� X . Weshow thatfor thecaseof absolutedelayconstraints,we needonly deterministicschedulerssincedeterministicschedulersachieve the lowestaveragepower forall valuesof
` a Ù 8 usinga corollary to thefollowing Theorem.We first show that the power required using a randomizedschedulersatisfying absolutedelay bound
` a Ù 8 equals theconvex combination of powers of deterministic schedulerssatisfyingsamedelaybound
` a Ù 8 .Theorem13 (Convexity of randomizedschedulers): LetøÐ Ñ xC� � be the set of all zero outagedeterministicschedulers
that guaranteean absolute delay` a Ù 8 . If a zero outage
randomizedscheduler® alsoguaranteesabsolutedelay` a Ù 8 ,
then the averagepower is
� a�bdc $ ® 't�P�»� �ã » � aBbdc $j� » ' 0 (25)
where� » Å øÐ Ñ xE� � and � ð � øÐ Ñ xC� � � . Also, for all
½,ã »(Å / !A0 4
and�»� �ã » �æ .
Proof: Follows readily from time sharing argumentsand issummarizedin Appendix I. Ü
The following corollary shows that the solution of (24) isalwaysa deterministicscheduler.
Corollary 14 (Optimal scheduler:absolutedelaybound):Among all schedulerswhich guaranteean absolute delaybound
` a Ù 8 , the one requiring least power is alwaysdeterministic.Proof: Follows readily from Theorem13 andrealizingthatallã » � ! . Ü
As a result of Corollary 14, the constraint set � $ ` a Ù 8 'in the optimization problem (24) can be further reducedtoinclude only the set of all deterministicschedulerssatisfyingabsolutedelay bound
` a Ù 8 . Now, to solve the optimizationproblem (24), we again use the VIA. Notice that with theincreasingvalueof
` a Ù 8 , the statecomplexity of VIA growsexponentially. Thus, for illustration, we computethe optimalpolicies for
`sa Ù 8 � 0 ¥ 0 ó and show the minimal achievedpower as a function of their average(not absolute)delaysinFigure3. Thethreepointsmarkedby � correspondto absolutedelay guaranteesof one, two and three time-slots. Beyondthe third point correspondingto
` a Ù 8 ��ó , the computationalcomplexity of VIA becomesprohibitive. Thus,only an upperboundon requiredpower is shown, which is obtainedby usingtheschedulerdesignedfor
` a Ù 8 �Zó . As canbeseenfrom thefigure, a policy guaranteeingan absolutedelay requiresmoretransmitpower to achieve the sameaveragedelayas the onewhich doesnot give any absolutedelayguarantees.
Note that although the queuestate representedusing ��=carriesmore information than N�= , its use in SectionIII wasavoidedfor two reasons.First, the numberof statesincreasesexponentially with
` a Ù 8 and the VIA quickly becomesin-tractable.Second,the Little’s theorem[24] gives a simplerelationshipbetweenN = and
` a�bdcwhereasthere is no such
simplerelationbetweenN = and` a Ù 8 .
0 10 20 30 40 50 60 70 80 90 1000
1
2
3
4
5
6
7
8
9
10
BUFFER STATE
NU
MB
ER
OF
PA
CK
ET
S T
RA
NS
MIT
TE
D
Fig. 7. Schedulersfor fading channel(Buffer size ����H�#$# , maximumarrival %��QH�# , uniform arrival distribution, 4 statefading A=[2 4 6 10],transitionprobability betweenstatesgiven in (22).).
Having an averagedelayboundonly fixes the meanof thedistribution of actual packet delays. In contrast,having anabsolutedelay bound,controls the supportof the delay dis-tribution. Both meanandthe supportof the delaydistributioncanbe controlledby the following optimizationY\[^]� � Ñ xC� � � f /Î�,= Y� N�= 4 � (26)
Differentvaluesof�
yield different` a�bdc
underthesamea Ù 8 .
For�e� ! , (26) reducesto (24), which transmitsleastpower
for a givenabsolutedelaybound.As�
increases,the requiredpower also increaseswhile the averagedelay decreasesfor afixedabsolutedelaybound.Eventually, as
�Õ´[f, (26) would
yield a schedulerwhich flushesall the packetsin thebuffer atall instants,i.e., theaverage(andabsolute)delayswould equalone.Note we requirethatall packetsshouldhave a delaylessthan
` a Ù 8 . In practice, this maybe too stringent and delayviolationswith someprobability canbe tolerated[31].
V. ISSUES IN IMPLEMENTING SCHEDULERS IN PRACTICAL
SYSTEMS
The proposedschedulerstructurerequiresa physical layerimplementationwhich canadaptively changethe transmissionrateandpower from onetime-slot to another, a featurewhichcan be supportedin systems[32] like EDGE (TDMA) and1Xtreme (CDMA). In this section,we show that the powergainspredictedusing information theoreticpower control (6)can be obtainedby using a simple multi-rate transmissionscheme.Our aim in this section is to show, by an exampledesign,thetradeoff betweenpacket delayandsubsequentmin-imum requiredtransmissionpower; no particularoptimality isclaimedin the exampledesign.
In our systemformulation, the receiver is unaware of thechosennumberof packets,O = andhencethetransmitterneedsto sendthis informationwhich is referredto asprotocol infor-mation in [33] to the receiver. In SectionV-B, we show howthis protocol information can be obtainedfrom the received

RAJAN ET.AL.: DELAY-BOUNDED PACKET SCHEDULING OF BURSTY TRAFFIC OVER WIRELESSCHANNELS 15
# Packets/time-slot # Bits/modulation-symbol Averagepower (dB)1 2 5.52 4 123 6 22.5
TABLE I
THE POWER REQUIRED TO ACHIEVE AN AVERAGE PACKET ERROR OF 0.05
USING A CONVOLUTIONAL CODE WITH VARIABLE QAM.
signalR = , thus obviating the needfor side information from
the transmitterto the receiver.
A. SimpleMulti-rate TransmissionScheme
The information theoreticnotion of reliability, usedin theprevious sections,requirescoding over large time intervalsto achieve arbitrarily small probability of error. For finitelengthtime-slots,only a finite packeterroris achievable.Thus,arbitrarily smallpacket errorwill bereplacedby a targetfinitepacket error rate.
We assumethe size of eachpacket to be 25 bits and thechannelbandwidthand transmitpulseshapearesuchthat 25symbolscanbe transmittedin eachtime-slot.The transmittercanchooseto transmitzeroto threepackets.For every choiceof number of packets, the data bits of the all packets arejointly encodedas a one long packet, using a convolutionalencoderof rate
� ¥ with constraintlength 3 and generatormatrix / �: 4 [27]. The output of the convolutional encoderis modulatedusing a variable rate QAM dependingon O =according to Table I. For example, to transmit 2 packetsper time-slot, the schemeneedsto transmit 100 codedbits(2 packets
¿25 bits/packet
¿2 codedbits/informationbit)
using 25 symbols, which implies 4 bits/symbol; hencewechooseasimplerectangular16-QAM constellationin thiscase.For � � �� , the power requiredto achieve a packet error rateof 0.05 in an AWGN channelis given in Table I.8
For simulations,we use an On-Off arrival processwhichproduceseither 0 or 3 packets in any time-slot with equalprobability, thus hasan averagepacket arrival rate : �)G� � .We considera buffer of length I � ¥=� packets.To transmitall packets at error rate of 0.05, with an averagedelay of1 time-slotrequiresanaveragetransmitpowerof 19.5dB. Weusetheoptimalschedulingtechniqueintroducedin SectionIIIto find O = as a function of the queuestate N�= for differentdelays. Using the optimal schedulerto achieve an averagedelay bound of 2 time-slots, the averagepower required is10.02dB, giving a substantialsaving of almost 9.5dB overthe caseof the delay of 1 time-slot. Again, the savings arepossibledue to the strictly convex relation betweenpowerand rate of transmission.A samplehistogramof the numberof packets transmittedin eachtime-slot for an averagedelayof 2 time-slots was found by calculating the number of
8An alternative is to changethe coding rate assumingthe modulation(numberof constellationpoints) is fixed, say 4-QAM. To transmit1, 2 or 3packetspertime-slotcodingratesof 1/6,1/3 or 1/2 couldbeusedrespectively.Alternately, differentpuncturingof thesamecodecanbeused.Dependingonthe coding rate, the minimum distancebetweensignal points is changedtomaintainsamepacket error rate.
packets transmittedin eachtime-slot over 50,000time-slots.The histogramrevealsthat 0 packets/time-slotaretransmittedwith probability 0.0549,1 packet/time-slotis transmittedwithprobability0.3825and2 packets/time-slotaretransmittedwithprobability 0.5625.Interestingly, 3 packets/time-slotarenevertransmittedin our simulationswhich translatesinto significantpower savings whencomparedto the delayof 1 time-slot.
B. Power BasedDetectionof TransmissionRate
In a multi-rate system,where the rate of transmissioniscontrolled by the transmitter, the receiver should have theknowledgeof instantaneoustransmissionrateto achieve targeterror rates.Following the terminologyin [33], the informationregarding instantaneousrate is labeledas protocol informa-tion.9 In our formulation, the instantaneousrate informationcan be extracted from the average received signal power.Since the transmissionpower is chosenproportional to thetransmissionrate, in an AWGN channelthe received signalpower is directly relatedto the transmissionrate.Below, wederive a rate detectorfor the multi-rate systemdescribedinSectionV-A.
Let hypothesis� » representthe transmissionof½
packetsper time-slot. For clarity of presentation,the subscript ;representingthe time index is suppressed.For an AWGNchannel,the received signal
R »^¹ is given byR »�¹ � P »^¹ ÖT »�¹
with½ �ù 0 ¥ and ¼ �ù 0 ¥ 0 �^�^� 0q� , where P � ¹ and P � ¹
representsthe ¼�JML symboltransmittedin the I andQ channels,respectively. Recall that
T »^¹ is assumedto be zero meancircularly symmetric i.i.d. Gaussiannoise with variance � � .The numberof symbolsin eachtime-slot equals � . Denotethematrixof receivedsignalby
R � / R »�¹ 4 , thelikelihoods[34]of the differenthypothesisaregiven by
@ $ R � � � ' � �»Î ��¹Ã �
� ¥�] ��� � «G�-n¡ -Cd -
@ $ R � � � ' � �»Î ��¹Ã �
¥ � ¥�] ��� � « ^ � n` a¢ � b --Ed - � « ^ � n¡ �£ ¢ � b --Cd -
@ $ R � � � ' � �»Î ��¹Ã �
� � ¥�] ��� � « ^ � n` a¢ - b --Ed - � « ^ � n¡ �£ ¢ - b --Cd -
� « ^ � n¡ £ � ¢ - b --Cd - � « ^ � n¡ a � ¢ - b --Cd -
@ $ R � � ' � �»Î ��¹Ã �
ò � ¥�] ��� � « ^ � n` a¢ � b --Ed - � « ^ � n¡ �£ ¢ � b --Cd -
� « ^ � n¡ £ � ¢ � b --Cd - � « ^ � n¡ a � ¢ � b --Cd - � « ^ � n` £=¤ ¢ � b --Ed - � « ^ � n¡ a ¤ ¢ � b --Cd - � « ^ � n` N£=¥ ¢ � b --Ed - � « ^ � n` a ¥ ¢ � b --Ed -
The minimum distancebetweenconstellationpoints equals¥ § � 0 ¥ § � and¥ § under hypothesis� � 0 � � and � respec-
tively. The optimumML detectorfor the instantaneousrate is
9A lower boundon the protocol informationis given by the entropy of thedepartureprocess¦c§©¨©ª andan upperboundis given by « ¬`$® ¯¡°²±�³$´`µ .

16 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003
thengiven by
¶¸· ¹�º=»C¼¾½¿º=ÀÁÃÂÅÄÇÆ È+ÉËÊ�Ì(ÍÏÎ ÁEÐNÑ (27)
The probability of bit error under hypothesis Î Á dependslargely on Ò Á and to maintainsamesymbol error rate undereachhypothesis,we needto make Ò©Ó ¹ ÒÕÔ ¹ ÒÕÖ . However, tomaintainthesamepacket error rate,we needto choosediffer-ent Ò Á for a given noisevariance.We testedthe performanceof theML detector(27) with the Ò Á chosento guaranteepacketerror ratesof 0.1 in eachhypothesis.We transmittedvariablenumberof packets in each time-slot for 100,000time-slotsandthe ML detector(27) accuratelydetectsthe instantaneousratesin eachtime-slot. Hence,the error is lower than ×�ØÙÅÚ .The ML detectorhad error rateslower than ×$Ø Ù©Ú wheneverÒ Á (andcorrespondinglytransmitpowers)werechosento havepacket error rateslower than0.1.
Thus, the complete receiver for the proposedmultiratesystemwill first detectthenumberof transmittedpackets,andthen usedthe appropriatedecoderto recover the transmittedpackets. An alternatemethod is to encodethe number ofpacketsin theheaderof thepacket (usingafixedcode),decodetheheaderfirst andthenappropriatelychoosetheright decoderfor the rest of the data.10 The alternative is better suitedwhere ¶ · can rangeover a large set, and hencemakes (27)computationallyhard.
VI . DISCUSSION
Timing Capacity : The idea of sendinginformation in thearrivals timesof the packetsin additionto the packet contentswasintroducedandformalizedin [35]. In our system,we canusethevariablenumberof packetsin eachtime-slotto conveyextra informationin additionto packetcontents.If we designaschedulerto maximizethis extra information,we would needto maximize the entropy of Û ¶ ·Ü while maintaining delayboundsandbuffer overflow requirements.Obviously, sendingsuch covert information comesat the cost of increasingtheaveragepower of transmission.
We presenta simple schedulerthat can be used to sendcovert information. Let Û/Ý Á Ü representin binary form thecovert information to be transmitted.Choose¶Þ· as follows,
¶¸· ¹Ø if ß ·�àLá× if áUâ ß · â�ãSäIå and Ý Á ¹ Øá if áUâ ß · â�ãSäIå and Ý Á ¹ ×ß · if ß ·�æ ãçäIå
(28)
The power minimizing schedulers,transmitsat ratesequaltoaveragerates(if delay and buffer requirementsare satisfied)and henceminimizes the covert information that could betransmitted.
Packet Reordering : If multiple usersare competingforthewirelessresource,schedulingtheusersbecomescritical inmaximizingsystemperformance.Servicedisciplineslike firstcomefirst serve (FCFS),lastcomefirst serve (LCFS),earliest
10Note that the headerbasedalternative is similar to using a preambletotrain the receiver, and the ML detector(27) is equivalent to blind channelestimation.
deadline first (EDF), and weighted fair queueing (WFQ)addressthe problemof resourceallocationto differentusers.
Our schedulerformulation which boundsaveragedelays,doesnot dependon the order in which packets in the bufferare serviced.So, FCFS and LCFS have similar power re-quirementsfor the sameaveragedelay bounds.However thedistribution of actualdelaysexperiencedby thepacketsshowscompletelydifferentcharacteristicsin FCFSandLCFS basedschedulers.Using FCFSpolicy, the distribution of delayswasalmostuniform andhada small range.In contrast,with LCFSthe distribution of delaywashighly skewed; large numberofpacketsexperienceda delayof 1 time-slotwhile a few packetsexperienceddelaysgreaterthan900 time-slots.Consequentlyfor certaintypesof quality of service(QoS) requirementsofform (29), LCFS is betterthanFCFS.
Most schemesprovide QoS guaranteesof the followingform èÇé Û�Òëê�ì�íqî æ�ï�Ü â�ð (29)
For ðU¹ Ø , this is the sameas the absolutedelay guaranteesthat our schemeprovides. For ð æ Ø , this QoS guaranteeissimilar but not identical to having a weightedcombinationofaverageandabsolutedelay in our optimization(26).
Schedulinghas beenusedto refer to the order in whichmultiple users/flows are serviced at any node [14]. Suchdisciplinessolve the problemof orderingthe different flows,basedon certain metrics, before transmission.On the otherhand,our schedulerssolve the problemof finding the numberof packets in a given flow to be transmittedduring any timeslot. In an actual wireless network, we should potentiallycombine the known servicedisciplines like WFQ with rateandpower adaptive schedulerswe introduced.
Source coding interpretation : If we considerour informa-tion to lie in thepacket arrival times,thenour scheduleractionis analogousto that of a lossy sourcecoder. The higher thedelay allowed, the more is the compressionof information.For example,if delay limit is one then the arrival timing ofthe packets are exactly known at the receiver; equivalent tolosslesscoding. As the delay limit increases,the schedulerdelayscertainpackets more than the othersand the receiverwill only have a noisyversionof the packet arrival times;thisis similar to lossycoding.Asymptotically, asthedelaygoestoinfinity, thereceiver will only have informationon theaveragearrival rateof thepacketsandno informationabouttheirarrivaltimes; this casecorrespondsto zero ratecoding.This lossofinformationwith increasingdelayscanbeattributedto thefactthat the schedulermapping ñóòqßõôö ¶ is not invertible exceptwhendelayequals1.
VI I . CONCLUSION
In this paper, we presentedpower optimal schedulersfortransmissionof bursty traffic on AWGN and fading chan-nels underdelay constraints.A computationallysimple near-optimal scheduler, labeledlog-linearscheduler, wasalsopro-posed.An approximateclosedform relationbetweenaveragepower and average delay was derived; it was shown thatat large valuesof delay, the logarithm of the power variesinverselywith the delay. Power efficient schedulerswhich use

RAJAN ET.AL.: DELAY-BOUNDED PACKET SCHEDULING OF BURSTY TRAFFIC OVER WIRELESSCHANNELS 17
packetarrival time stampsto guaranteeboundson absolutede-lay werealsoproposed.Thepower savingsweredemonstratedin a practical systemusing a simple multi-rate transmissionscheme,which employs a convolutional codesand multi-rateQAM.
The power savings can be attributed to the strictly convexrelationbetweenpower andrate.Fundamentally, if the powerversusraterelationshipis strictly convex, schedulingof pack-etscanbe usedto tradedelaywith power, if eitherthe sourceor channelis time-varying.
Our main objective in the paper was to demonstratetheutility of packet scheduling in wireless systems.For thesamereason,we had assumedsimplistic sourceand channelmodels.For instance,i.i.d. sourcemodelsrarely representrealsources,which typically do have strongtime-correlation[36].Thus, a challengein implementingthe proposedschedulersin a practical systemis facedwhen there are errors in themodel or if the model parametersare not known accurately.Other imperfectionsincludethe delayanderror in transmitterknowledgeof the channel,which can possiblybe accountedfor by using resultsfrom [37] and[38].
REFERENCES
[1] AndreaJ.GoldsmithandPravin P. Varaiya,“Capacityof fadingchannelswith channel side information,” IEEE Transactionson InformationTheory, vol. 43, no. 6, pp. 1986–1992,Nov. 1997.
[2] David J. Goodman,J. Borras,NarayanB. Mandayam,and Roy Yates,“INFOSTATIONS: A new systemmodel for data and messagingser-vices,” Proceedingsof Vehicular Technology Conference, pp. 969–973,May 1997.
[3] ClaudeE. Shannon,“A mathematicaltheory of communication,” BellsystemsTechnical Journal, pp. 379–423,July 1948.
[4] Balaji Prabhakar, Elif U. Biyikoglu, and Abbas El Gamal, “Energy-efficient transmissionover a wirelesslink via lazy packet scheduling,”in Proceedingsof INFOCOM, Anchorage,Alaska,April 2001.
[5] B.E. Collins andReneL. Cruz, “Transmissionpoliciesfor time varyingchannelswith averagedelay constraints,” in Proceedingsof AllertonInternational Conferenceon Communication,Control and Computing,Monticello, IL, 1999,pp. 709–717.
[6] Heng Wang and Narayan B. Mandayam, “Dynamic power controlunder energy and delay constraints,” submittedto IEEE Transactionson InformationTheory, 2001.
[7] RandallA. Berry andRobertG. Gallager, “Communicationover fadingchannelswith delay constraints,” IEEE Transactionson InformationTheory, vol. 48, no. 5, pp. 1135–1149,May 2002.
[8] Rohit Negi, Power AdaptationStrategies for Delay Constrained Chan-nels, Ph.D. thesis,StanfordUniversity, September2000.
[9] GiuseppeCaire, Giorgio Taricco,and Ezio Biglieri, “Optimum powercontrol over fadingchannels,” IEEE Trans.Info. Th., vol. 45, no. 5, pp.1468–1489,July 1999.
[10] ThomasM. Cover andJoy A. Thomas,Elementsof InformationTheory,Wiley, New York, 1991.
[11] Robert G. Gallager, “A perspective on multiaccesschannels,” IEEETransactionson InformationTheory, vol. 31, no. 2, pp. 124–142,Mar.1985.
[12] Anthony Ephremidesand Bruce Hajek, “Information theory and com-municationnetworks: An unconsummatedunion,” IEEE Transactionson InformationTheory, vol. 44, no. 6, pp. 2416–2434,Oct. 1998.
[13] I. Emre Telatarand RobertG. Gallager, “Combining queueingtheorywith informationtheoryfor multiaccess,” IEEE Journal on SelectAreasin Communications, vol. 13, no. 6, pp. 963–969,Aug. 1995.
[14] Hui Zhang, “Service disciplinesfor guaranteedperformanceserviceinpacket-switchingnetworks,” Proceedingsof the IEEE, October1995.
[15] VaduvurBharghavan, SongwuLu, andThyagarajanNandagopal,“Fairschedulingin wirelesspacket networks: Issuesandapproaches,” IEEEPersonalComm.Mag., vol. 6, no. 1, pp. 44–55,Feb. 1999.
[16] Xin Liu, Edwin K. P. Chong, and Ness B. Shroff, “Transmissionschedulingfor efficient wirelessutilization,” Proceedingsof INFOCOM,2001.
[17] Matthew Andrews, Krishnan Kumaran, Kavita Ramanan,AlexanderStolyar, Rajiv Vijayakumar, and Phil Whiting, “CDMA data QoSscheduling on the forward link with variable channel conditions,”Technical Report,Bell Laboratories,LucentTechnologies., 2000.
[18] Niranjan Joshi, Srinivas R. Kadaba,Sarvar Patel, and GanapathyS.Sundaram, “Downlink scheduling in CDMA data networks,” inProceedingsof MOBICOM, 2000,pp. 179–190.
[19] Matthew Andrews, Krishnan Kumaran, Kavita Ramanan,AlexanderStolyar, Phil Whiting, and Rajiv Vijayakumar, “Providing quality ofserviceover a sharedwirelesslink,” IEEE CommunicationsMagazine,vol. 39, no. 2, pp. 150–154,February2001.
[20] Dinesh Rajan, AshutoshSabharwal, and BehnaamAazhang, “Delaydifferentiatedpower efficient downlink scheduling,” in preparation tobe submittedto IEEE Transactionson Communications, 2002.
[21] Dinesh Rajan, AshutoshSabharwal, and BehnaamAazhang, “Trans-missionpolicies for bursty sourcesthroughtime varying channels,” inProceedingsof ÷$ø�ùûú Annual Conferenceon Information SciencesandSystems, Baltimore,MD, Mar. 2001.
[22] AshutoshSabharwal, Dinesh Rajan, and BehnaamAazhang, “Dualproblemsin power control,” in Proceedingsof Allerton ConferenceonCommunication,Control andComputing, Monticello, IL, October2001.
[23] DineshRajan,Powerefficienttransmissionpoliciesfor multimediatrafficover wirelesschannels, Ph.D. thesis,Rice University, April 2002.
[24] Dimitri P. BertsekasandRobertGallager, Data Networks, PrenticeHall,1992.
[25] Lawrence H. Ozarow, Shlomo Shamai,and Aaron D. Wyner, “In-formation theoretic considerationsfor cellular mobile radio,” IEEETransactionson VehicularTechnology, vol. 43, no. 2, pp. 359–378,May1994.
[26] RobertG. Gallager, Information Theoryand ReliableCommunication,JohnWiley andSons,Inc., 1968.
[27] JohnG. Proakis, Digital Communications,Fourth Edition, Mc-GrawHill Inc., 2001.
[28] Linn I. Sennott, Stochastic DynamicProgrammingand the control ofQueueingSystems, JohnWiley andSons,Inc., 1999.
[29] Ezio Biglieri, JohnG. Proakis,andShlomoShamai,“Fadingchannels:Information-theoreticandcommunicationsaspects,” IEEE Transactionson InformationTheory, vol. 44, no. 6, pp. 2619–2692,October1998.
[30] Balaji Prabhakarand Robert G. Gallager, “Entropy and the timingcapacityof discretequeues,” IEEE Transactionson InformationTheory,vol. 49, pp. 357–370,2003.
[31] Edward Knightly, “Enforceablequality of serviceguaranteesfor burstytraffic streams,” Proceedingsof INFOCOM, 1998.
[32] Sanjiv Nanda,Krishna Balachandran,and SarathKumar, “Adaptationtechniquesin wireless packet data services,” IEEE CommunicationsMagazine, pp. 54–64,2000.
[33] Robert G. Gallager, “Basic limits on protocol information in datacommunicationnetworks,” IEEE Transactionson Information Theory,vol. 22, no. 4, pp. 385–399,Jul. 1976.
[34] Harry L. VanTrees,Detection,Estimationand ModulationTheoryPartI, JohnWiley andSons,New York, 1968.
[35] Venkat Anantharamand Sergio Verdu, “Bits through queues,” IEEETransactionson InformationTheory, vol. 42, no. 1, pp. 4–18,1996.
[36] Will E. Leland,MuradS.Taqqu,WalterWillinger, andDanielV. Wilson,“On the self-similar natureof ethernettraffic,” Proceedingsof ACMSIGCOMM, 1993.
[37] Harish Viswanathan,“Capacity of markov channelswith receiver CSIanddelayedfeedback,” IEEE Transactionson InformationTheory, , no.2, pp. 761–771,March 1999.
[38] GiuseppeCaireandShlomoShamai,“On thecapacityof somechannelswith channelstate information,” IEEE Transactionson InformationTheory, vol. 45, no. 6, pp. 2007–2019,Sept.1999.
APPENDIX
A. Proof of Proposition4 : Conditionsfor zero outage sched-ulers
Proof : If ß ·YâüãõäÃå then from (2), ß ·�ý Ó âüã and as aresult, therewill be no buffer overflow. So a buffer overflowis possibleonly ß · æ ãõäxå , thus we will concentrateonthe casewhen ß · ¹õþ�ÿNþ ¹ÃãSäYå � × ÿ Ñ Ñ Ñ ÿqã .
Direct (if) : We will first prove that if either of Condition1or 2 is satisfied,then the schedulerwill be zero outage.If

18 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003
ß ·�� ãçäLå , andCondition2 is satisfied,thenusing (2) weget
ß ·�ý Ó â þ ä�� � åâ ãSäYå � åh¹�ã Ñ
Thereforetherewill beno buffer overflow. On the otherhand,if Condition 1 is satisfiedfor state ß ·�� ãóä{å , then thereis zeroprobability for the buffer to be in that state.Thus,nobuffer overflow is possible.Note that we have assumedthatthe buffer starts from the zero state, ß�� ¹ Ø (if the bufferwas initialized from a state ß ·r¹|þ such that Á ¹ Ø andÊ þä� Ð æ ã�ä8å � × thentherewill be a buffer overflow withfinite probability).Converse(only if) : We will prove the converseby contradic-tion, that if there exists state ß · ¹²þ � ãIä å that doesnot satisfy both Conditions1 and 2, then the correspondingschedulerwill not be zerooutage.If stateþ of the buffer doesnot satisfy Condition 1, with finite non-zeroprobability thebuffer will be in state þ . Since state þ also doesnot satisfyCondition2, using (2) with finite probability
ß ·�ý Ó ¹ þ ä�� � åæ ãSäYå � åh¹�ã Ñ
Consequently, a buffer overflow occurs. �B. Proof of proposition5 : Equivalentelementsof �� ���� ���Proof : If stateþ for which Á ¹ Ø is suchthat þ â Ê ã8äIå Ðthenthe propositionis trivially proved.So,assume Á ¹ Ø forsome þ æ Ê ãWäÃå Ð . Since ñ is deterministic,all its entriesare zero or one. Using (7) implies that each column of ñand �ñ containexactly onenon zeroelement.Without lossofgenerality, let ñ�� � Á ¹ × for some þ$ÿ�� . Now, if �:¹ þ , then�ñ ¹ ñ and �ù²þ��Pþ�ä��{â ãIä�å . If ���¹²þ , choose�ñ�� � ¹ ñ�� � ÿ"!¿¹ Ø ÿ × ÿ ÑqÑoÑ ÿqã$#%!�¹õþ$ÿ���¹ Ø ÿ × ÿ ÑqÑoÑ ÿqã and �ñ Á � Á ¹× . Clearly, underscheduler�ñ for stateþ , Ê þä� Ð â Ê ã�ä8å Ð .Since �ñ�� � ¹ ñ�� � ÿ&!U¹ Ø ÿ × ÿ ÑqÑoÑ ÿqã$#%!'�¹�þ/ÿ��g¹ Ø ÿ × ÿ ÑqÑoÑ ÿqãand Á ¹ Ø , ñ and �ñ give the same average delay andpower (follows from equations(9) and (10).). That is ñ ÿ �ñ)(�* ���� �+� . �C. Proof of proposition6 : Basisexpansionof elementsin ,Proof : Since -.(/, , it must satisfy either Condition 1or Condition 2 of Proposition 4. If state þ of - satisfiesCondition1, Á ¹ Ø , of Proposition4, thenfrom (8), we notethat 021Á � 354 ¹ Ø ÿ (30)
where0 Á � 3 is the þ7698 row of :;3 ; notefor clarity, we explicitly
show thedependenceof thematrix : on - . Fromthedefinition
of :;3 it follows that if - ¹<�>=+Ó? �A@B� then :C3 ¹
<�>=ÇÓ? � :;D&E .
Hence, 0 Á � 3 ¹<�>=+Ó? � 0 Á � D&E Ñ (31)
Now, from (30) and (31) we get
<�>=ÇÓ? � 0 1Á � D E 4 ¹ Ø , which
implies that for all ��¹ × ÿCá�ÿ Ñ Ñ Ñ ÿ"F , either ? � ¹ Ø or0 1Á � D&E 4 ¹ Ø .
If0 1Á � D E 4 ¹ Ø then @ � is a zerooutagescheduler, i.e., @ �G(H, .
So if @ � is not a zerooutagescheduler, we musthave ? � ¹ Ø .In other words, if a certain buffer statehaszero probabilityundera randomizedscheduler, then all deterministicpolicieswhich causethat buffer state to have nonzero probability,have zero weight in the basisexpansionof that randomizedscheduler.
On the other hand,if state þ of - satisfiesCondition 2 ofProposition4, then � ¹W½JILK Û � ò5-5� � �¹ Ø Ü ÿ satisfies!ÞäJ��âãSäIå for all ! ¹�ãSäLå � × ÿ ÑÏÑ Ñ ÿqã . Thus, in the expansionin termsof its basis, � ¹Y½MILKN� Á suchthat ? Á �¹ Ø where � Á ¹½JIOK � ò Ê @ ÁCÐ � � �¹ Ø . Consequently, ? Á ¹ Ø if � Á doesnotsatisfy !�äP� Á âxã ä å for all !U¹�ã ä�å{ÿ Ñ Ñ Ñ ÿqã . In otherwords,if thenumberof packetstransmittedin eachbuffer stateundera givenrandomizedscheduleris largeenoughto maintainzerobuffer overflow, then all deterministicpolicies which do nottransmitenoughpacketsto maintainzerobuffer overflow, havezeroweightin thebasisexpansionof therandomizedschedulerin termsof deterministicpolicies.
Hence,? Á ¹ Ø if @ Á doesnot satisfy Conditions1 or 2 ofProposition4, i.e., if @ Á is not zero outage.It follows that? Á ¹ Ø if @ Á (JQ ä , . �
D. Proof of Lemma7 : Delay-powerof two ‘almost’ identicalschedulers
Let :;RTS and 4 RTS be the transitionprobability matrix andstationaryprobabilityvectorunderschedulerñ�U . Define :;R�Vand 4 RTV in a similar manner. Also define Wã{¹YX Øõ× ÑoÑoÑ ã[Z 1and Wè ¹\X è · Ê Ø Ð
è · Ê × Ð"ÑoÑqÑè · Ê ã Ð Z
1. Using (9), ïP]_^%` Ê ñ�U Ð ¹4
1RBS Wã and ïP]_^%` Ê ñ�a Ð ¹ 4
1RTV Wã . From the definition of : ’s
it follows that :;RTS and :;R�V differ only in the þ7698 column.Further, :;R ¹b? :;RTS � Ê × äc? Ð :CR�V .
Let us assume4 R ¹)?�d 4 RBS � Ê × äc?�d Ð 4 RTV andverify thereexists an ?�d to satisfy (8), i.e.,
X ? :;RTS � Ê × äc? Ð :CR�V Z ? d 4 RBS � Ê × ä'? d Ð 4 R�V ¹ ? d 4 RTS �Ê × ä ? d Ð 4 R V
Using simple algebraicmanipulationof the matrices,wecanreducethe condition for finding ?Td to the following,
X :;RTS ä :;R�V Z ? Ê × ä'? d Ð 4 RTV äc? d Ê × ä'? Ð 4 RTS ¹ ØSince, : R S and : R S differ only in the þ7698 column, : R S ä: R V is a matrix with 0 elementsin all columnsotherthantheþ7698 column.Therefore,we needto choose?�d to satisfy
? Ê × äc? d Ð _RBS � Á ä'? d Ê × ä'? Ð _RTV � Á ¹ Ø Ñ (32)
Hence, ? d ¹ ? R Ve� Á? R Ve� Á � Ê × ä'? Ð R Se� Á Ñ

RAJAN ET.AL.: DELAY-BOUNDED PACKET SCHEDULING OF BURSTY TRAFFIC OVER WIRELESSCHANNELS 19
Now, we only needto show thatè ]_^%` Ê ñ Ð ¹f?�d è ]_^%` Ê ñ U Ð �Ê × ä'?Td Ð
è ]_^%` Ê ñ a Ð . Using (10),è ]_^%` Ê ñ U Ð ¹ 4
1RBS ñ 1U W
è,
è ]_^%` Ê ñ Ð ¹ 41R ñ1 Wè¹ Ê ? d 41RBS � Ê × ä'? d Ð 4
1R�V Ð Ê ? ñ
1U � Ê × ä'? Ð ñ
1a Ð Wè¹ ?g? d è ]_^%` Ê ñ U Ð � Ê × ä'? Ð Ê × äc? d Ð
è ]_^%` Ê ñ a Ð �? Ê × äc? d Ð 41R V ñ
1U Wè � ? d Ê × ä'? Ð 4
1R S ñ
1a Wè
¹ ?g? d è ]_^%` Ê ñ�U Ð � Ê × ä'? Ð Ê × äc? d Ðè ]_^%` Ê ñ�a Ð �? Ê × äc? d Ð 4
1R�V Ê ñ
1U ä ñ
1a Ð Wè �? Ê × äc? d Ð 4
1R�V ñ
1a Wè � ? d Ê × äc? Ð 4
1RTS ñ
1U Wè �
? d Ê × ä'? Ð 41R S Ê ñ
1a ä ñ
1U Ð Wè �¹ ? d è ]_^%` Ê ñ�U Ð � Ê × ä'? d Ðè ]_^%` Ê ñ�a Ð �X ? Ê × ä'? d Ð 4
1R�V ä'? d Ê × ä'? Ð 4
1RBS Z Ê ñ
1U ä ñ
1a Ð Wè
Now, Ê ñ1U ä ñ 1a Ð equalsa matrix with 0 in all rows except
the þ7698 row and hence Ê ñ1U ä ñ
1a Ð Wè
is a vectorwith 0 in allelementsexcept the þA698 row. Now using (32), we find thatè ]_^%` Ê ñ Ð ¹b?�d
è ]_^%` Ê ñ U Ð � Ê × äc?�d Ðè ]_^%` Ê ñ a Ð �
E. Proof of Theorem8 : Characterizationof delayandpower
Proof : Using proposition6, �? Á ¹ Ø if @ Á (JQ ä , . Hence,
- ¹< dÁ =ÇÓ �? Á @ Á ÿ
where@ Á (*Qihj, , Ø â �? Á â × ,< dÁ =ÇÓ �? Á ¹ × with Flk ¹ Í Qihm, Í .
In our constructionof thebasisexpansionof scheduler- inthefirst step,we have a convex combinationof two schedulerswhich differ only in onecolumn.Hence,usingLemma7 thedelay of scheduler - is given by a convex combinationofthe delays and powers of two schedulers(which need notbe deterministic).Each of thesematrices is further writtenin terms of matriceswhich differ in only one column andhenceits power and delay are convex combinationsof delayand power of somematrices.Repeatingthis processtill thesubmatricesaredeterministic,the theoremis proved. �
F. Proof of Lemma9 : Converseto Theorem8
Sinceschedulerñ U achievesaveragedelay ï ]_^%` Ê ñ U Ð andaveragepower
è ]_^%` Ê ñ U Ð , it implies that for any n æ Ø , thereexists an o æ opRBS such that using scheduler ñ�U for otime-slotsgives averagedelay �ï RTS and averagepower �è RTSsatisfying Í �ïP]_^%` Ê ñ�U Ð ä ïP]_^%` Ê ñ�U Ð Í à n and Í �
è ]_^%` Ê ñ�U Ð äè ]_^%` Ê ñ�U Ð Í à n . Similarly oqR�V exists for ñ�a .Now, we time sharebetweenschedulersñ�U and ñ�a in the
ratio ? ò Ê × ä)? Ð to get schedulerñ . Given any n æ Ø find
o ¹W½¿º�À r$s St ÿur$s VÓ Ù t . While switchingfrom schedulerñ�U
to ñ a , we additionallyflush the buffer in time-slot ? o . Now,
Í �ï ]_^%` Ê ñ Ð ä ï ]_^%` Ê ñ Ð Í â ? Í �ï ]_^%` Ê ñ U Ð ä ï ]_^%` Ê ñ U Ð Í �Ê × äc? Ð Í �ïP]_^%` Ê ñ�a Ð ä ïP]_^%` Ê ñ�a Ð Í � ã
o'vâ ? n � Ê × ä'? Ð n � ão'v¹ n � ã
o'v ÑIn the limit as o ö w ÿ�xrzy ö Ø . Hence, �ïP]_^%` Ê ñ Ð ö? ïP]_^%` Ê ñ�U Ð � Ê × äc? Ð ïP]_^%` Ê ñ�a ÐNÑ Similarly,
Í �è ]_^%` Ê ñ Ð ä
è ]_^%` Ê ñ Ð Í â ? Í �è ]_^%` Ê ñ U Ð ä
è ]_^%` Ê ñ U Ð Í �Ê × ä'? Ð Í �
è ]_^%` Ê ñ�a Ð ä è ]_^%` Ê ñ�a Ð Í � ×oè · Ê ã ÿ"{Ç·ÿ"| Ô Ð
â ? n � Ê × äc? Ð n � ×oè · Ê ã ÿ&{ · ÿ&| Ô Ð
¹ n � ×oè · Ê ã+ÿ&{ · ÿ&| Ô ÐNÑ
In the limit as o ö w ÿ Órè · Ê ã+ÿ&{Ç·ÿ"| Ô Ð ö Ø . Again, if
we consider } consecutive blocks of o time-slots,the totalaveragedelayandpower is givenby the averageof thedelaysand powers in eachblock of o time-slots.Hence,by time-sharingbetweenschedulersñ�U and ñ�a we can achieve alldelaysand powers given by the convex combinationof thedelaysandpowersof ñ U and ñ a . �G. Value Iteration Algorithm (VIA)
Let ~ Ê þ$ÿ í Ð representthe cost incurredin doing action í instateþ . Let
è Á � Ê í Ð is theprobabilityof transitioningfrom stateþ to state� underaction í . Also, let ß denotea predeterminedstate and n is a small positive number that determinesthestopping criterion. The generalstepsin the Value IterationAlgorithm [28] are
1) Initialize Ý �C� Ø , ð�¹ × and !U¹ Ø .2) Evaluate�G Ê þ Ð ¹W½MILK] ~ Ê þ$ÿ í Ð � �
è Á � Ê í Ð Ýu Ê � Ð .
3) Set ðL¹ Í �G Ê ß Ð ä �G Ù Ó Ê ß Ð Í and Ýu ý Ó Ê þ Ð ¹ �� Ê þ Ð ä�G Ê ß Ð .4) Repeatsteps2 and3 above till ð�à n .5) The optimal actionsfor eachstateþ areobtainedas
í�� Ê þ Ð ¹Wº=»C¼ ½JILK] ~ Ê þ�ÿ í Ð � �è Á � Ê í Ð Ý Ê � Ð Ñ
In the above, ! representsthe !�698 iterationof the VIA. In thecaseof schedulerswhich bound averagedelay, the differentVIA symbolshave thefollowing correspondence,þ � ß · ÿ í �¶ · . Also,
è Á � � Ê í Ð dependson thearrival distribution Â¸Ê í · Ð . ForGaussianchannels,~ Ê þ�ÿ í Ð ¹
è · Ê ¶ · ÿ × ÿ&| Ô Ð ��� ß · where�
isthe Lagrangianusedin (14).
H. Proof of Proposition11 : ExtremalPower Source
The proof follows from the convexity of the power controlfunction
è · Ê ¶ · Ð ; for simplicity, the dependenceon { · ¹ ×and | Ô is suppressed.Let the output distribution be � ¹X � � ÿ�� Ó ÿ Ñ ÑÏÑ � x Z 1 . Sincethesystemis stable,�q� X í · Z ¹ �q� X ¶ · Z .
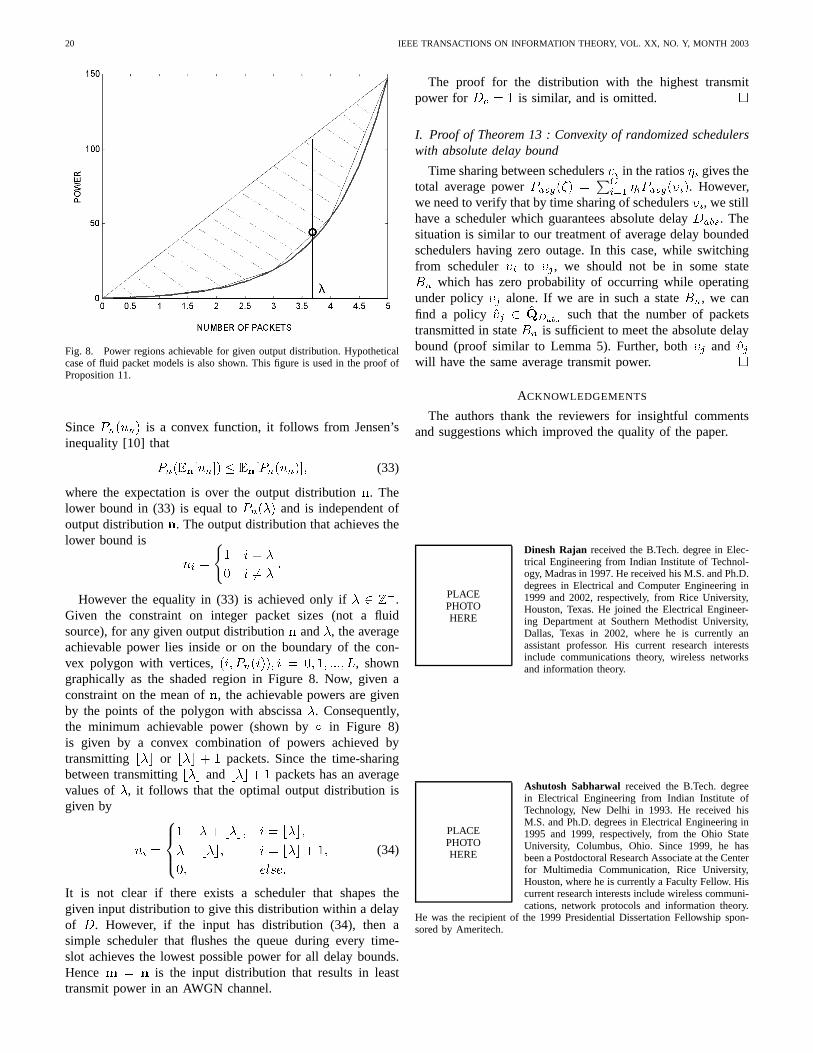
20 IEEE TRANSACTIONS ON INFORMATION THEORY, VOL. XX, NO. Y, MONTH 2003
Fig. 8. Power regionsachievable for given outputdistribution. Hypotheticalcaseof fluid packet modelsis alsoshown. This figure is usedin the proof ofProposition11.
Sinceè · Ê ¶Þ· Ð is a convex function, it follows from Jensen’s
inequality [10] thatè · Ê � � X ¶¸·uZ Ð â � � Xè · Ê ¶¸· Ð Z�ÿ (33)
where the expectationis over the output distribution � . Thelower boundin (33) is equalto
è · Ê v Ð and is independentofoutputdistribution � . Theoutputdistribution thatachievesthelower boundis
� Á ¹ × þ ¹ vØ þP�¹ v Ñ
However the equality in (33) is achieved only if vb(�� ý .Given the constraint on integer packet sizes (not a fluidsource),for any givenoutputdistribution � and v , theaverageachievable power lies inside or on the boundaryof the con-vex polygon with vertices, Ê þ�ÿ
è · Ê þ ÐËÐ ÿ�þó¹ Ø ÿ × ÿ Ñ ÑÏÑ ÿoã , showngraphically as the shadedregion in Figure 8. Now, given aconstrainton the meanof � , the achievablepowersaregivenby the points of the polygon with abscissav . Consequently,the minimum achievable power (shown by � in Figure 8)is given by a convex combination of powers achieved bytransmitting ��v�� or ��v�� � × packets. Since the time-sharingbetweentransmitting ��v+� and ��v�� � × packetshasan averagevaluesof v , it follows that the optimal output distribution isgiven by
� Á ¹ × ä v � ��v�� ÿ|þ ¹ ��v+� ÿv ä ��v+� ÿ þ ¹ ��v+� � × ÿØ ÿ ê�ì�Õê Ñ
(34)
It is not clear if there exists a schedulerthat shapesthegiven input distribution to give this distribution within a delayof ï . However, if the input has distribution (34), then asimple schedulerthat flushesthe queueduring every time-slot achieves the lowestpossiblepower for all delay bounds.Hence � ¹ � is the input distribution that results in leasttransmitpower in an AWGN channel.
The proof for the distribution with the highest transmitpower for ïP� ¹ × is similar, and is omitted. �I. Proof of Theorem13 : Convexity of randomizedschedulerswith absolutedelaybound
Timesharingbetweenschedulers� Á in theratios? Á givesthetotal averagepower
è ]_^%` Ê�� Ð ¹ �Á =+Ó ? Áè ]_^%` Ê � Á Ð . However,
weneedto verify thatby timesharingof schedulers� Á , westillhave a schedulerwhich guaranteesabsolutedelay ï ]_��� . Thesituationis similar to our treatmentof averagedelayboundedschedulershaving zero outage.In this case,while switchingfrom scheduler� Á to � � , we should not be in some state� · which has zero probability of occurring while operatingunderpolicy ��� alone.If we are in sucha state
� · , we canfind a policy �� � ( ��� $�7�9� such that the numberof packetstransmittedin state
� · is sufficient to meetthe absolutedelaybound (proof similar to Lemma5). Further, both � � and �� �will have the sameaveragetransmitpower. �
ACKNOWLEDGEMENTS
The authorsthank the reviewers for insightful commentsandsuggestionswhich improved the quality of the paper.
PLACEPHOTOHERE
Dinesh Rajan received the B.Tech.degreein Elec-trical Engineeringfrom Indian Instituteof Technol-ogy, Madrasin 1997.HereceivedhisM.S.andPh.D.degreesin Electrical and ComputerEngineeringin1999 and 2002, respectively, from Rice University,Houston,Texas.He joined the Electrical Engineer-ing Departmentat SouthernMethodist University,Dallas, Texas in 2002, where he is currently anassistantprofessor. His current researchinterestsinclude communicationstheory, wireless networksand information theory.
PLACEPHOTOHERE
Ashutosh Sabharwal received the B.Tech. degreein Electrical Engineeringfrom Indian Institute ofTechnology, New Delhi in 1993. He received hisM.S. andPh.D.degreesin ElectricalEngineeringin1995 and 1999, respectively, from the Ohio StateUniversity, Columbus, Ohio. Since 1999, he hasbeenaPostdoctoralResearchAssociateat theCenterfor Multimedia Communication,Rice University,Houston,whereheis currentlya FacultyFellow. Hiscurrentresearchinterestsincludewirelesscommuni-cations,network protocolsand information theory.
He was the recipientof the 1999 PresidentialDissertationFellowship spon-soredby Ameritech.

RAJAN ET.AL.: DELAY-BOUNDED PACKET SCHEDULING OF BURSTY TRAFFIC OVER WIRELESSCHANNELS 21
PLACEPHOTOHERE
Behnaam Aazhang (S’82–M’82–SM’91–F’99)re-ceived his B.S. (with highest honors), M.S., andPh.D.degreesin ElectricalandComputerEngineer-ing from Universityof Illinois atUrbana-Champaignin 1981, 1983, and 1986, respectively. From 1981to 1985,he wasa ResearchAssistantin the Coordi-natedScienceLaboratory, University of Illinois. InAugust1985,he joined the faculty of Rice Univer-sity, Houston,Texas, where he is now a Professorin the Departmentof ElectricalandComputerEngi-neeringand the Director of Centerfor Multimedia
Communications.He hasbeena Visiting Professorat IBM FederalSystemsCompany, Houston,Texas, the Laboratory for CommunicationTechnologyat Swiss Federal Institute of Technology(ETH), Zurich, Switzerland,theTelecommunicationsLaboratoryat University of Oulu, Oulu, Finland, andat the U.S. Air Force Phillips Laboratory, Albuquerque,New Mexico. Hisresearchinterestsincludetheareasof communicationtheory, informationthe-ory, andtheir applicationswith emphasison multiple-accesscommunications,cellular mobile radio communications,andoptical communicationnetworks.









![IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, …IEEE TRANSACTIONS ON WIRELESS COMMUNICATIONS, VOL. XX, NO. XX, XXX 201X 2 processes before directional data communications [14]. To](https://img.pdfslide.net/doc/110x75/5f767a2b993c5b4ed7036e7f/ieee-transactions-on-wireless-communications-ieee-transactions-on-wireless-communications.jpg)



















