Embed Size (px)
Citation preview
دانشگاه آزاد اسالمی
واحد تهران جنوب
دانشکده تحصیالت تکمیلی
عصبی –حل تمرین منطق فازي و کنترل فازي
پارك معکوس خودرو
(مکاترونیک)
استاد راهنما: دکتر علی غفاري
نام و نام خانوادگی دانشجو: کیومرث حاجی آقا شریف
شماره دانشجویی:
9249210210 92دیماه
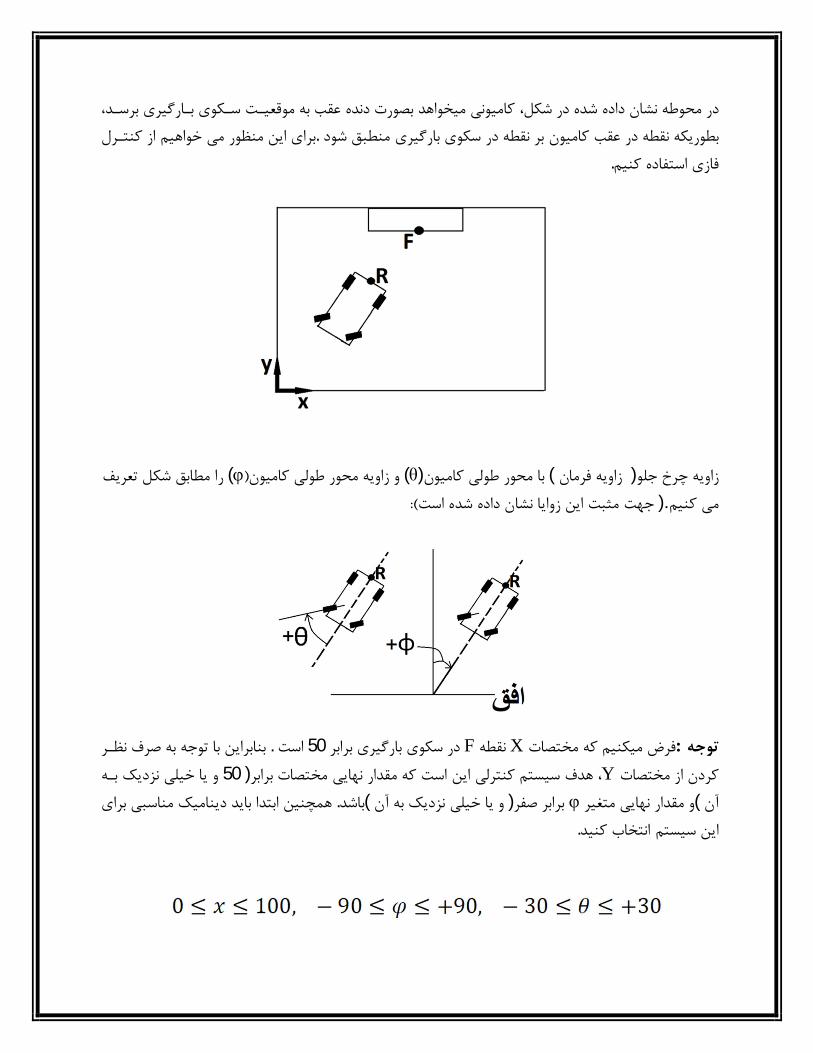
برسـد، بـارگیري سـکوي موقعیـت به عقب دنده بصورت میخواهد کامیونی شکل، در شده داده نشان محوطه در کنتـرل از خواهیم می منظور این براي .شود منطبق بارگیري سکوي در نقطه بر کامیون عقب در نقطه بطوریکه
.کنیم استفاده فازي
عریفت شکل مطابق را )φکامیون( طولی محور زاویه و (θ)کامیون طولی محور با ) فرمان زاویه( جلو چرخ زاویه است): شده داده نشان زوایا این مثبت جهت .(کنیم می
نظـر صرف به توجه با بنابراین . است 50 برابر بارگیري سکوي در F نقطه X مختصات که میکنیم فرض :توجه بـه نزدیک خیلی یا و( 50 برابر مختصات نهایی مقدار که است این کنترلی سیستم هدف ، Yکردن از مختصات
براي مناسبی دینامیک باید ابتدا همچنین. باشد )آن به نزدیک خیلی یا و( صفر برابر φ نهایی متغیر مقدار و )آن .کنید انتخاب سیستم این
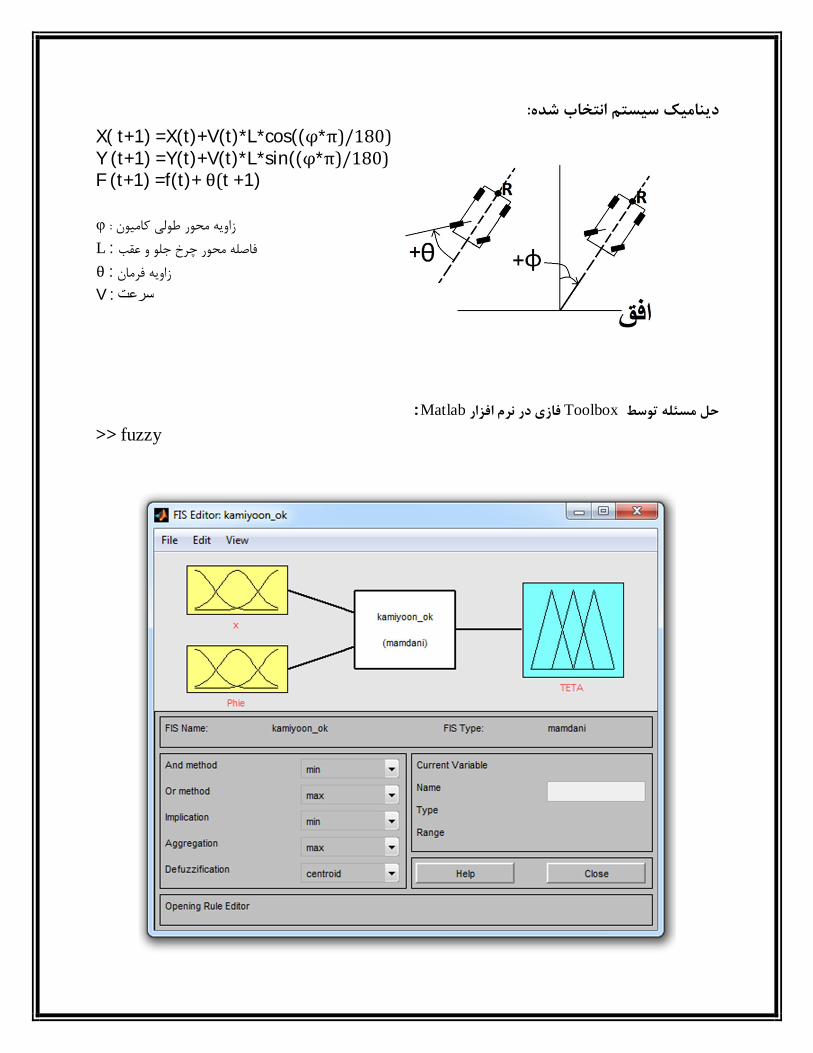
دینامیک سیستم انتخاب شده:X( t+1) =X(t)+V(t)*L*cos((φ*π)/180) Y (t+1) =Y(t)+V(t)*L*sin((φ*π)/180) F (t+1) =f(t)+ θ(t +1)
φکامیون : طولی محور زاویه : Lفاصله محور چرخ جلو و عقب θ : زاویه فرمان V :سرعت
: Matlabفازي در نرم افزار Toolboxحل مسئله توسط >> fuzzy
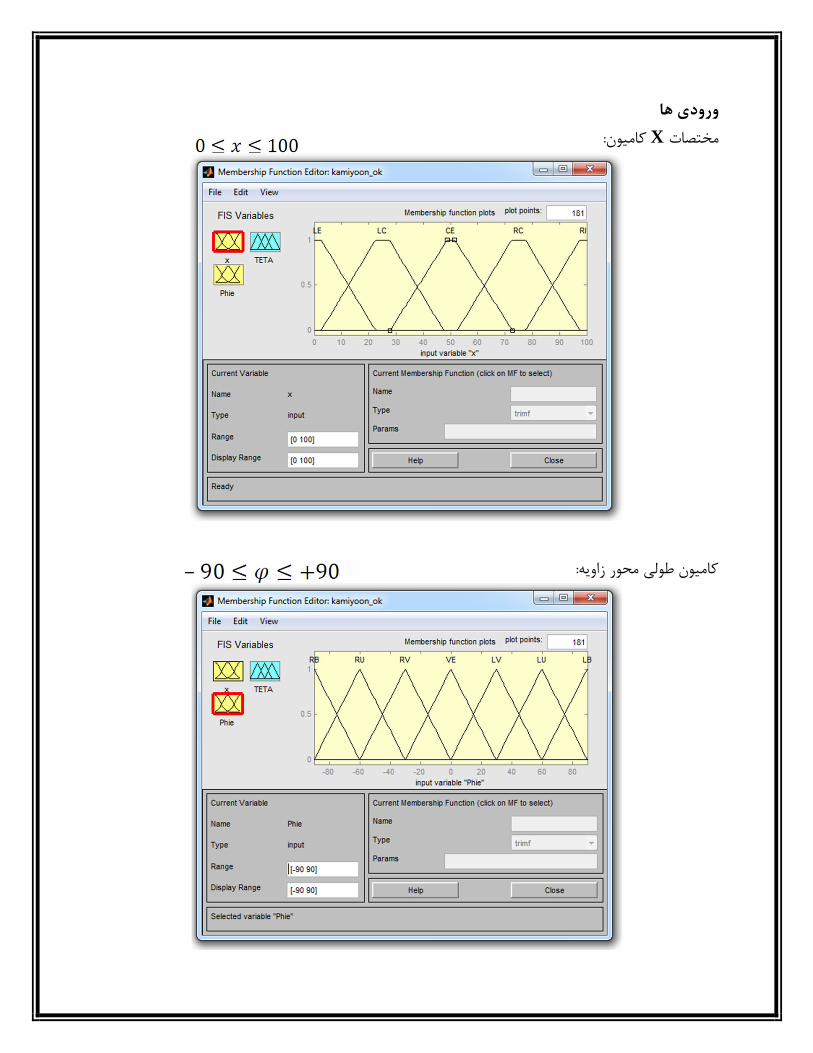
اورودي ه کامیون: Xمختصات
کامیون طولی محور زاویه:
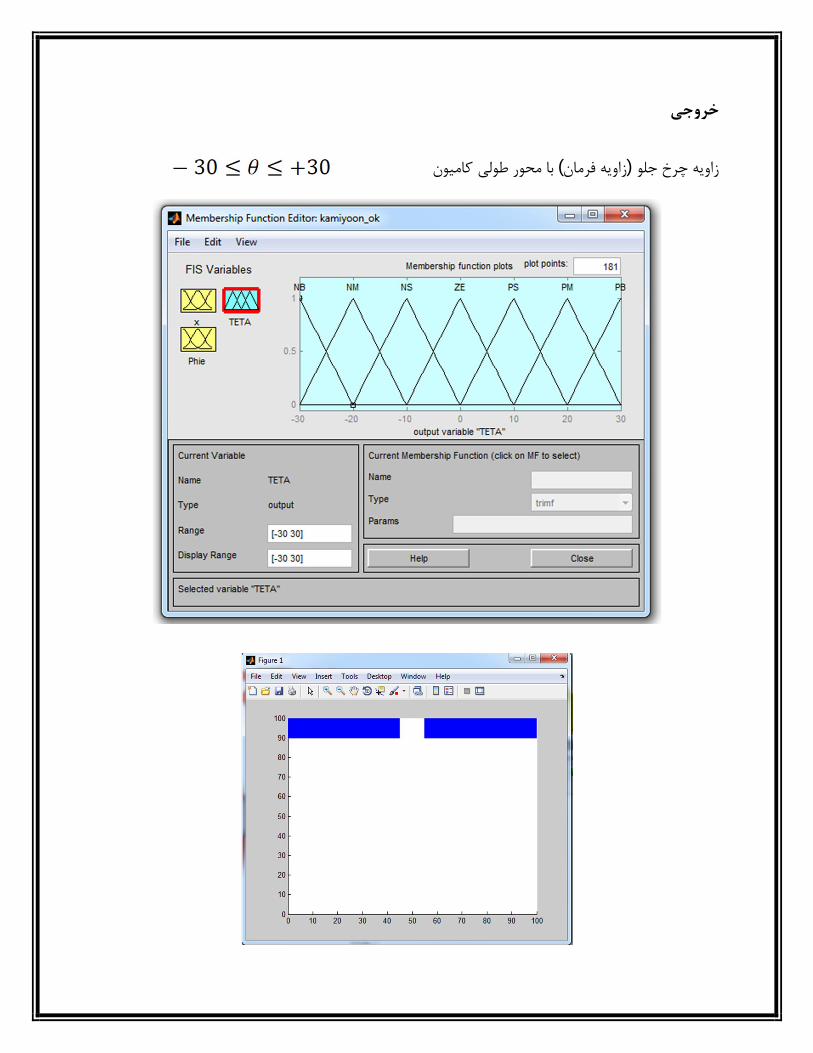
خروجی
کامیون طولی محور با )فرمان زاویه( جلو چرخ زاویه
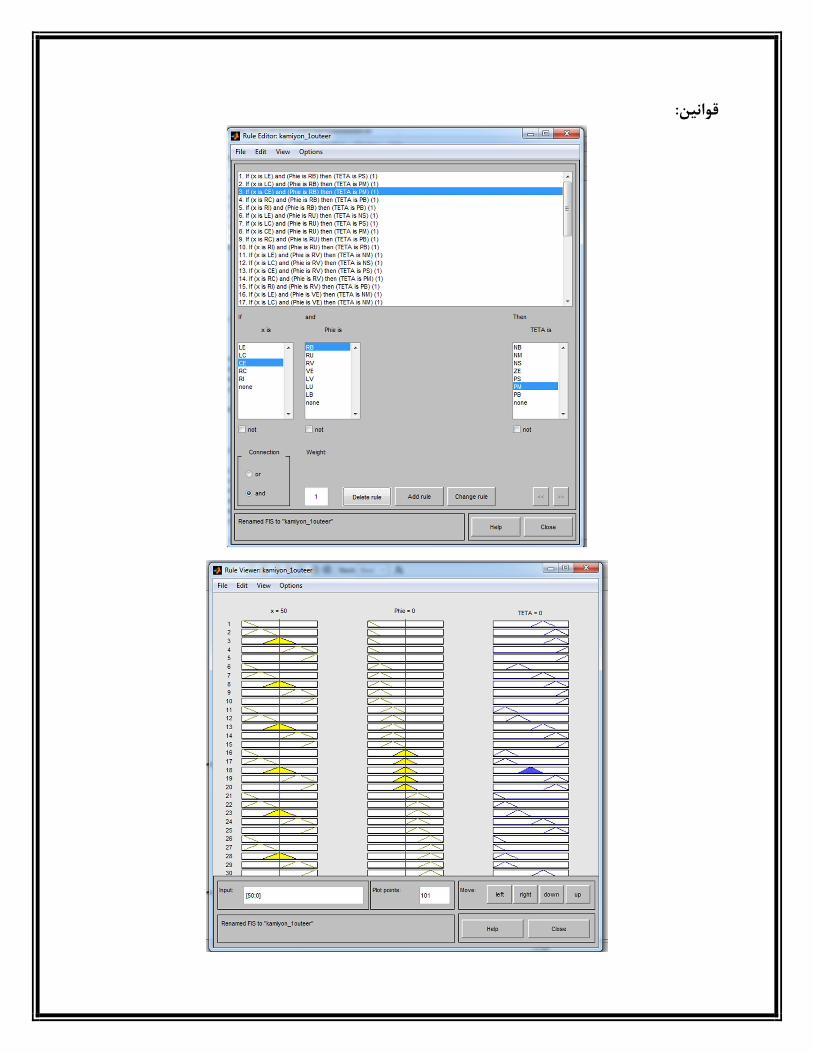
قوانین:
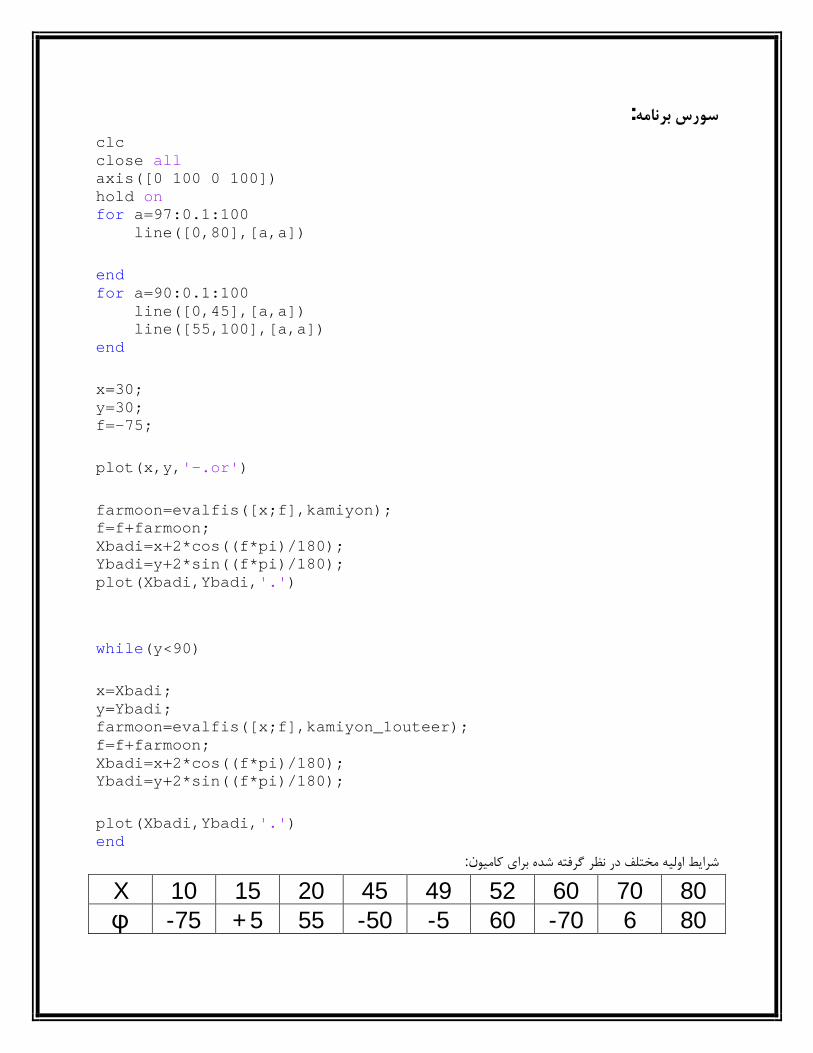
:سورس برنامه clc close all axis([0 100 0 100]) hold on for a=97:0.1:100 line([0,80],[a,a]) end for a=90:0.1:100 line([0,45],[a,a]) line([55,100],[a,a]) end x=30; y=30; f=-75; plot(x,y,'-.or') farmoon=evalfis([x;f],kamiyon); f=f+farmoon; Xbadi=x+2*cos((f*pi)/180); Ybadi=y+2*sin((f*pi)/180); plot(Xbadi,Ybadi,'.') while(y<90) x=Xbadi; y=Ybadi; farmoon=evalfis([x;f],kamiyon_1outeer); f=f+farmoon; Xbadi=x+2*cos((f*pi)/180); Ybadi=y+2*sin((f*pi)/180); plot(Xbadi,Ybadi,'.') end
ن:کامیو براي شده گرفته نظر در مختلف اولیه شرایطX 10 15 20 45 49 52 60 70 80 φ -75 +5 55 -50 -5 60 -70 6 80
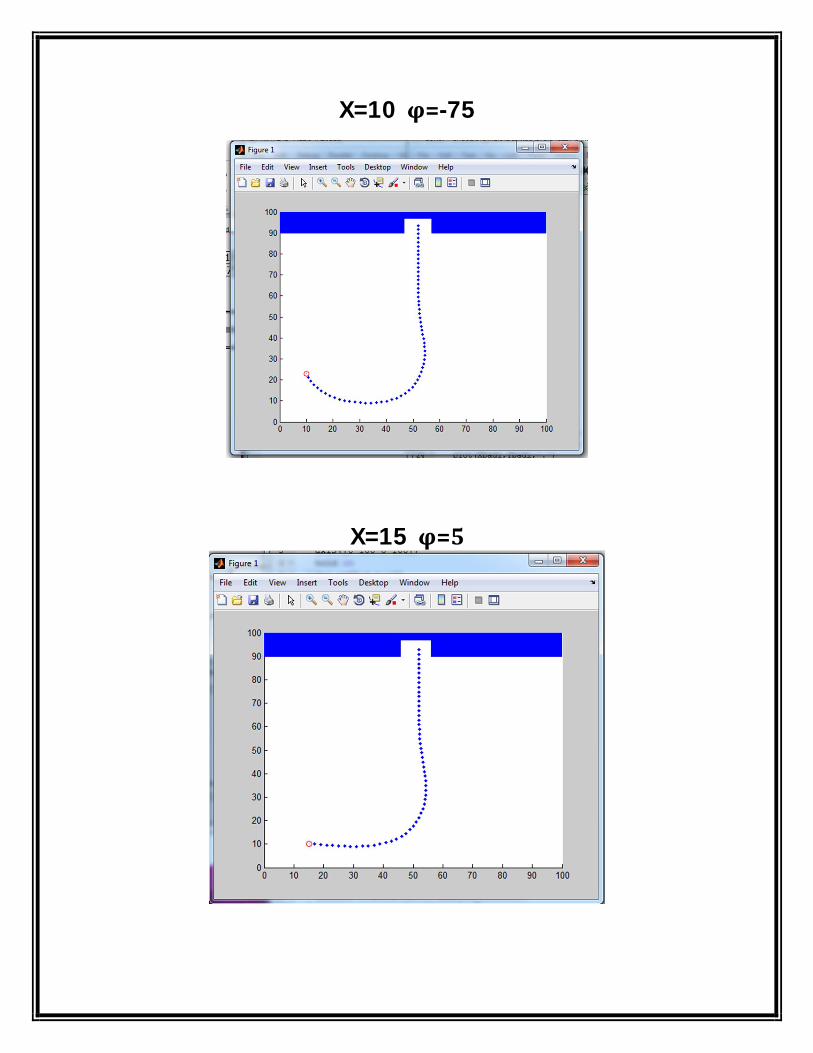
X=10 φ=-75
X=15 φ=5
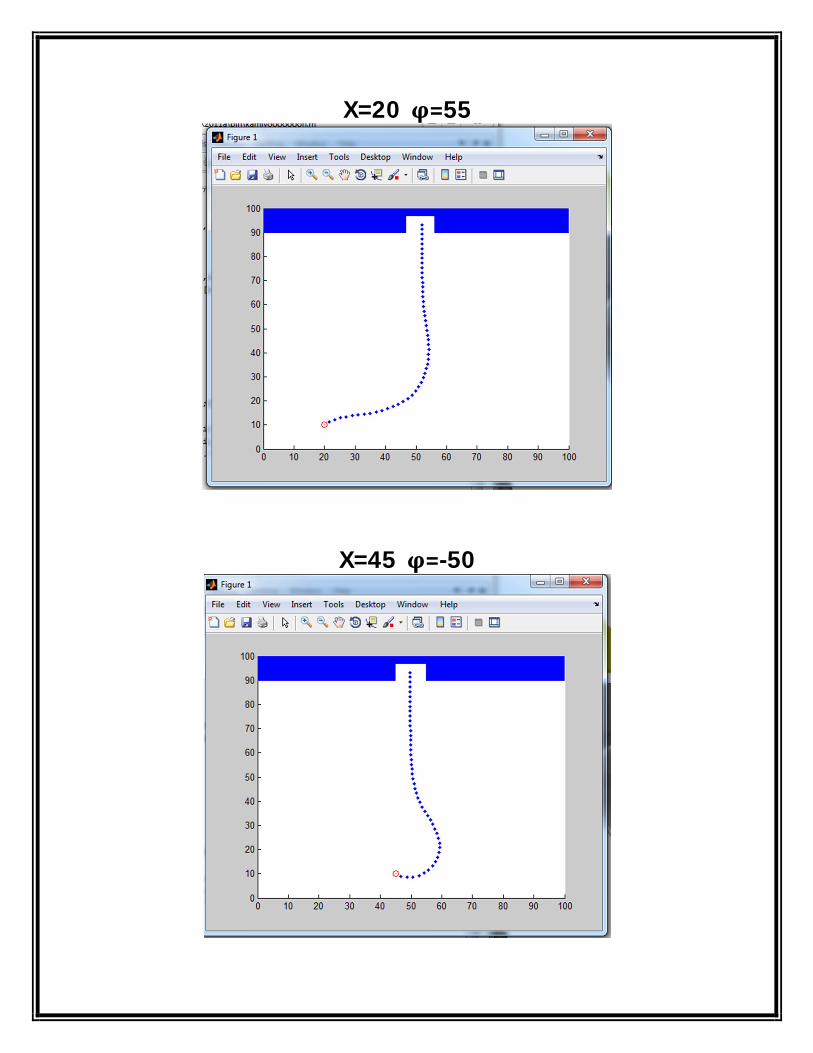
X=20 φ=55
X=45 φ=-50
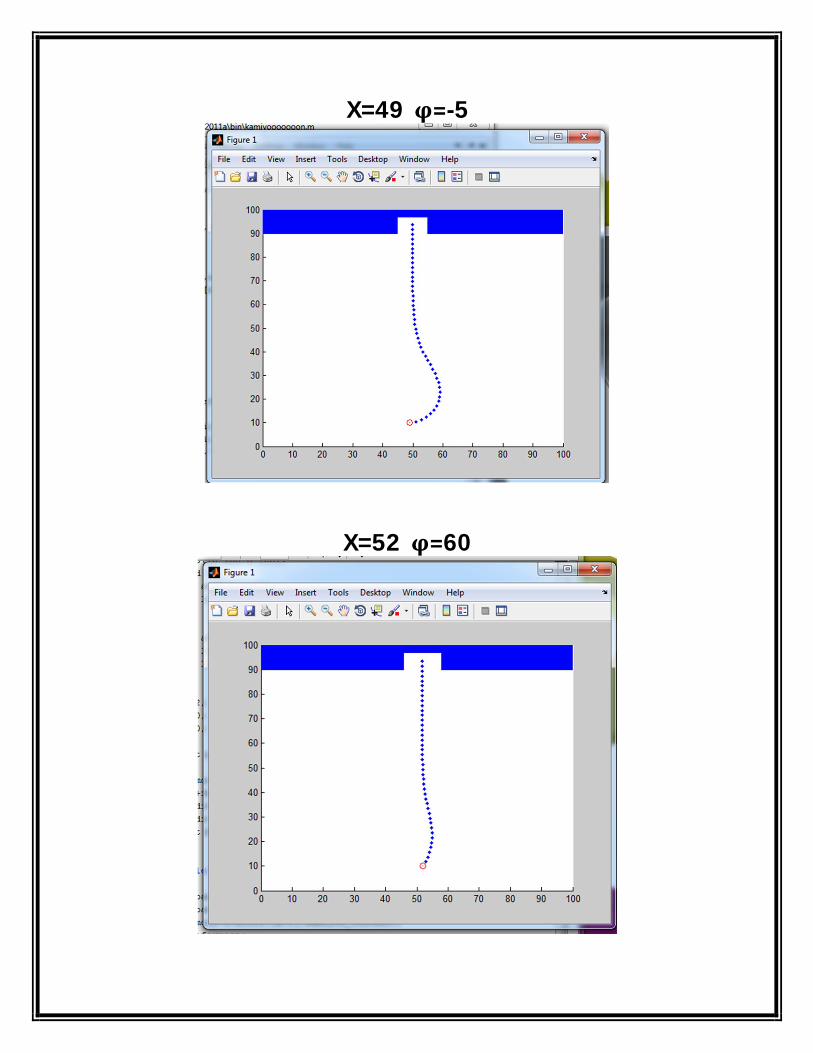
X=49 φ=-5
X=52 φ=60
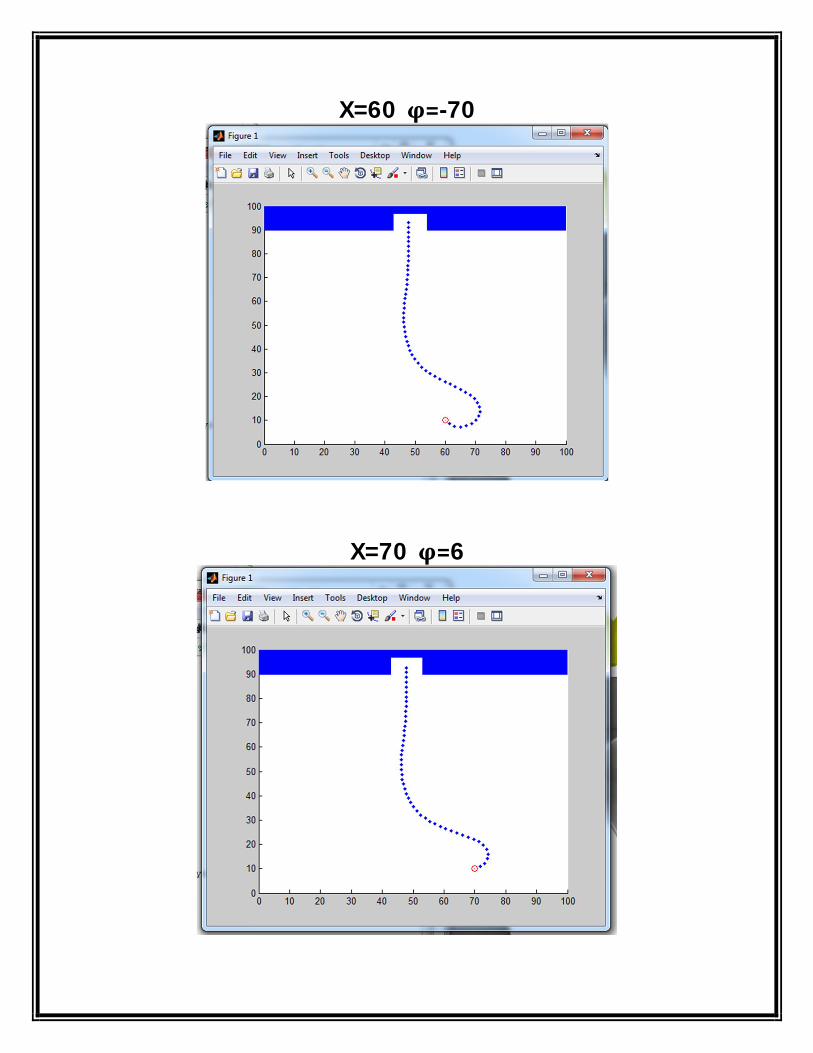
X=60 φ=-70
X=70 φ=6
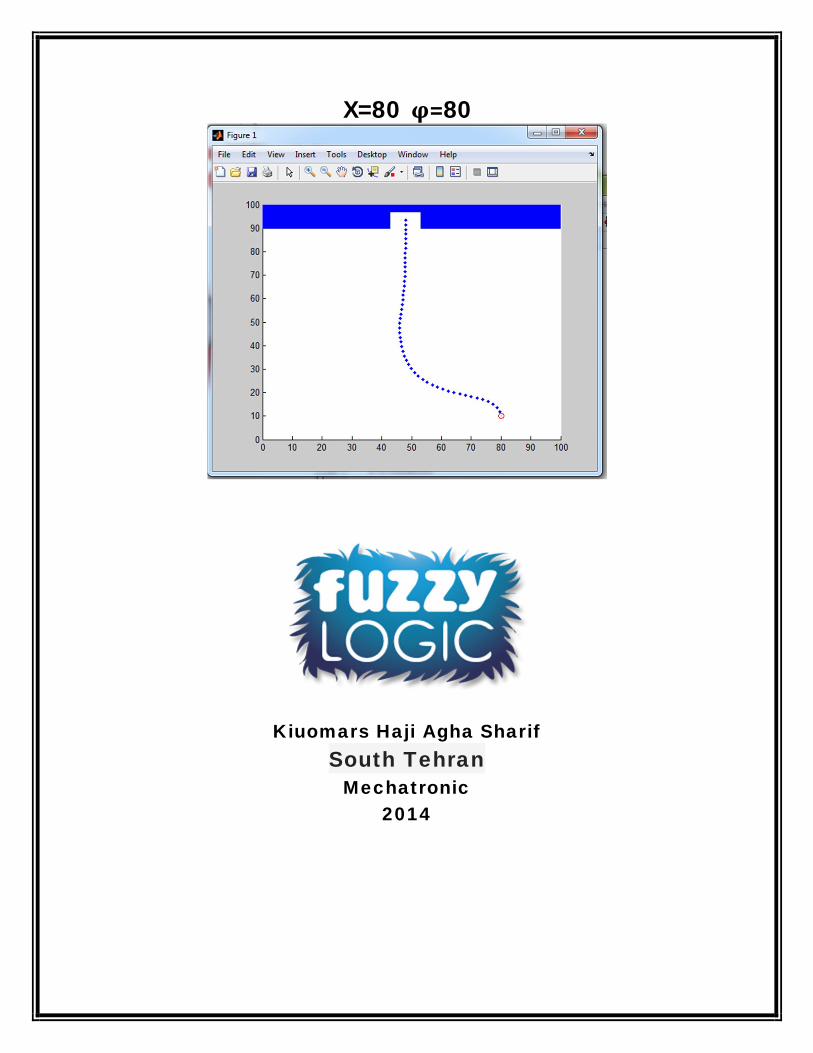
X=80 φ=80
Kiuomars Haji Agha Sharif South Tehran
Mechatronic 2014





























