Embed Size (px)
Citation preview

Impact of Removing Covariance Localization in an Ensemble Kalman Filter :Experiments with 10240 Members Using an Intermediate AGCM
KEIICHI KONDO
RIKEN Advanced Institute for Computational Science, Kobe, Japan
TAKEMASA MIYOSHI
RIKEN Advanced Institute for Computational Science, Kobe, Japan, and Department of Atmospheric and Oceanic
Science, University of Maryland, College Park, College Park, Maryland, and Japan Agency for Marine-Earth
Science and Technology, Yokohama, Japan
(Manuscript received 4 November 2015, in final form 7 September 2016)
ABSTRACT
The ensemble Kalman filter (EnKF) with high-dimensional geophysical systems usually employs up to 100
ensemble members and requires covariance localization to reduce the sampling error in the forecast error
covariance between distant locations. The authors’ previous work pioneered implementation of an EnKF
with a large ensemble of up to 10 240 members, but this method required application of a relatively broad
covariance localization to avoid memory overflow. This study modified the EnKF code to save memory and
enabled for the first time the removal of completely covariance localization with an intermediate AGCM.
Using the large sample size, this study aims to investigate the analysis and forecast accuracy, as well as the
impact of covariance localization when the sampling error is small. A series of 60-day data assimilation cycle
experiments with different localization scales are performed under the perfect model scenario to investigate
the pure impact of covariance localization. The results show that the analysis and 7-day forecasts are much
improved by removing covariance localization and that the long-range covariance between distant locations
plays a key role. The eigenvectors of the background error covariance matrix based on the 10 240 ensemble
members are explicitly computed and reveal long-range structures.
1. Introduction
The ensemble Kalman filter (EnKF; Evensen 1994) is
an advanced data assimilation method and approxi-
mates the Kalman filter (KF; Kalman 1960) by esti-
mating the forecast error covariance from a limited
number of samples or ensemble forecasts. In recent
EnKF studies using atmospheric models, the ensemble
size was usually limited to about 100 to balance the ac-
curacy of the EnKF and the model’s computational
complexity such as its resolution and physics schemes.
The limited ensemble size causes spurious sam-
pling errors, which contaminate the estimates of the
background error covariance and degrade the analysis
accuracy. Therefore, covariance localization plays an
essential role in limiting the influence of the observa-
tions within a prescribed distance and reduces the im-
pact of spurious sampling errors between distant
locations (e.g., Houtekamer and Mitchell 1998; Hamill
et al. 2001). The choice of the localization functional
shape is a tuning parameter, and this study employs two
types: the step function, which becomes zero at a certain
distance, and the Gaussian function, which is forced to
be zero at and beyond a distance of 2(10/3)1/2 standard
deviations (or simply SD hereafter) from the center of
localization. If we fit the Gaussian function to the widely
used Gaspari–Cohn function with compact support
(Gaspari and Cohn 1999), the Gaspari–Cohn function
becomes zero at this distance. In this study, the locali-
zation scale is defined as the distance at which the lo-
calization function becomes zero (i.e., the radius of
influence). Although optimal localization was explored
theoretically (Perianez et al. 2014; Flowerdew 2015;
Corresponding author address: Keiichi Kondo, RIKEN Ad-
vanced Institute for Computational Science, 7-1-26 Minatojima-
minami-machi, Chuo-ku, Kobe, Hyogo, 650-0047, Japan.
E-mail: [email protected]
Denotes Open Access content.
DECEMBER 2016 KONDO AND M IYO SH I 4849
DOI: 10.1175/MWR-D-15-0388.1
� 2016 American Meteorological SocietyUnauthenticated | Downloaded 02/15/22 05:21 AM UTC
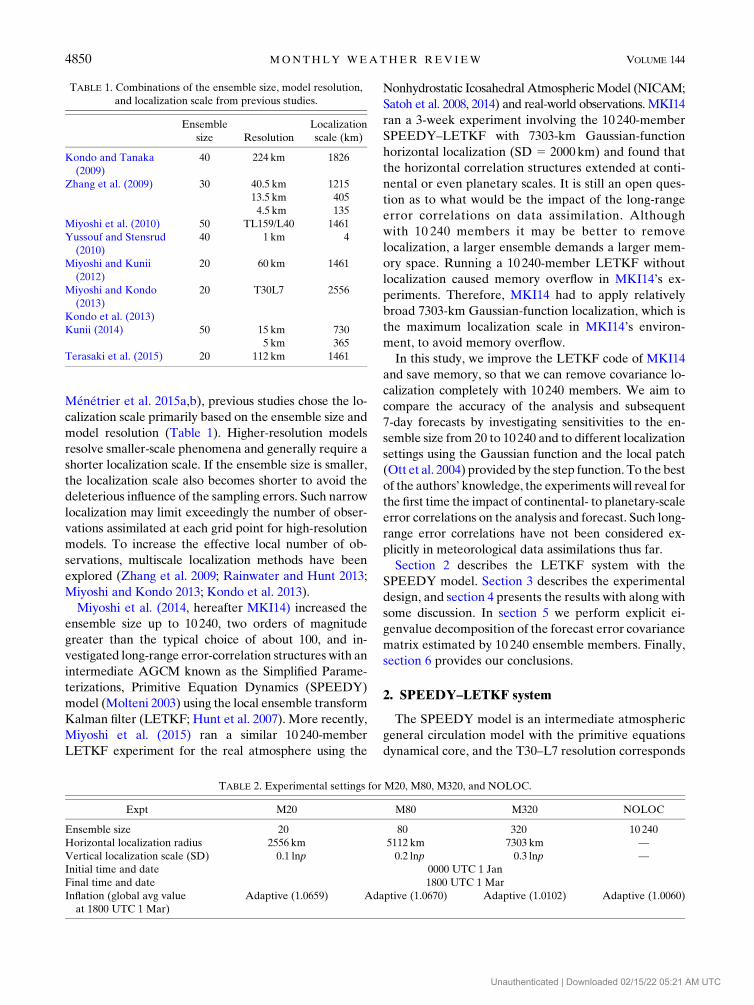
Ménétrier et al. 2015a,b), previous studies chose the lo-
calization scale primarily based on the ensemble size and
model resolution (Table 1). Higher-resolution models
resolve smaller-scale phenomena and generally require a
shorter localization scale. If the ensemble size is smaller,
the localization scale also becomes shorter to avoid the
deleterious influence of the sampling errors. Such narrow
localization may limit exceedingly the number of obser-
vations assimilated at each grid point for high-resolution
models. To increase the effective local number of ob-
servations, multiscale localization methods have been
explored (Zhang et al. 2009; Rainwater and Hunt 2013;
Miyoshi and Kondo 2013; Kondo et al. 2013).
Miyoshi et al. (2014, hereafter MKI14) increased the
ensemble size up to 10240, two orders of magnitude
greater than the typical choice of about 100, and in-
vestigated long-range error-correlation structures with an
intermediate AGCM known as the Simplified Parame-
terizations, Primitive Equation Dynamics (SPEEDY)
model (Molteni 2003) using the local ensemble transform
Kalman filter (LETKF; Hunt et al. 2007). More recently,
Miyoshi et al. (2015) ran a similar 10 240-member
LETKF experiment for the real atmosphere using the
Nonhydrostatic Icosahedral AtmosphericModel (NICAM;
Satoh et al. 2008, 2014) and real-world observations. MKI14
ran a 3-week experiment involving the 10 240-member
SPEEDY–LETKF with 7303-km Gaussian-function
horizontal localization (SD 5 2000 km) and found that
the horizontal correlation structures extended at conti-
nental or even planetary scales. It is still an open ques-
tion as to what would be the impact of the long-range
error correlations on data assimilation. Although
with 10 240 members it may be better to remove
localization, a larger ensemble demands a larger mem-
ory space. Running a 10 240-member LETKF without
localization caused memory overflow in MKI14’s ex-
periments. Therefore, MKI14 had to apply relatively
broad 7303-km Gaussian-function localization, which is
the maximum localization scale in MKI14’s environ-
ment, to avoid memory overflow.
In this study, we improve the LETKF code of MKI14
and save memory, so that we can remove covariance lo-
calization completely with 10240 members. We aim to
compare the accuracy of the analysis and subsequent
7-day forecasts by investigating sensitivities to the en-
semble size from 20 to 10240 and to different localization
settings using the Gaussian function and the local patch
(Ott et al. 2004) provided by the step function. To the best
of the authors’ knowledge, the experiments will reveal for
the first time the impact of continental- to planetary-scale
error correlations on the analysis and forecast. Such long-
range error correlations have not been considered ex-
plicitly in meteorological data assimilations thus far.
Section 2 describes the LETKF system with the
SPEEDY model. Section 3 describes the experimental
design, and section 4 presents the results with along with
some discussion. In section 5 we perform explicit ei-
genvalue decomposition of the forecast error covariance
matrix estimated by 10 240 ensemble members. Finally,
section 6 provides our conclusions.
2. SPEEDY–LETKF system
The SPEEDY model is an intermediate atmospheric
general circulation model with the primitive equations
dynamical core, and the T30–L7 resolution corresponds
TABLE 1. Combinations of the ensemble size, model resolution,
and localization scale from previous studies.
Ensemble
size Resolution
Localization
scale (km)
Kondo and Tanaka
(2009)
40 224 km 1826
Zhang et al. (2009) 30 40.5 km 1215
13.5 km 405
4.5 km 135
Miyoshi et al. (2010) 50 TL159/L40 1461
Yussouf and Stensrud
(2010)
40 1 km 4
Miyoshi and Kunii
(2012)
20 60 km 1461
Miyoshi and Kondo
(2013)
20 T30L7 2556
Kondo et al. (2013)
Kunii (2014) 50 15 km 730
5 km 365
Terasaki et al. (2015) 20 112 km 1461
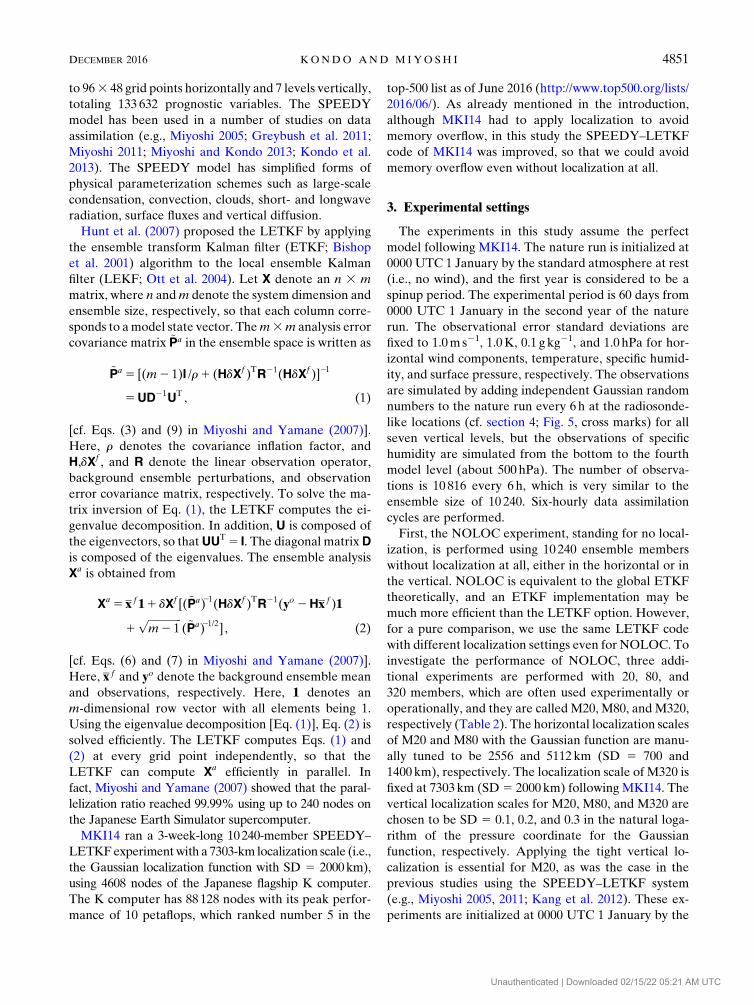
TABLE 2. Experimental settings for M20, M80, M320, and NOLOC.
Expt M20 M80 M320 NOLOC
Ensemble size 20 80 320 10 240
Horizontal localization radius 2556 km 5112 km 7303 km —
Vertical localization scale (SD) 0.1 lnp 0.2 lnp 0.3 lnp —
Initial time and date 0000 UTC 1 Jan
Final time and date 1800 UTC 1 Mar
Inflation (global avg value
at 1800 UTC 1 Mar)
Adaptive (1.0659) Adaptive (1.0670) Adaptive (1.0102) Adaptive (1.0060)
4850 MONTHLY WEATHER REV IEW VOLUME 144
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
to 963 48 grid points horizontally and 7 levels vertically,
totaling 133 632 prognostic variables. The SPEEDY
model has been used in a number of studies on data
assimilation (e.g., Miyoshi 2005; Greybush et al. 2011;
Miyoshi 2011; Miyoshi and Kondo 2013; Kondo et al.
2013). The SPEEDY model has simplified forms of
physical parameterization schemes such as large-scale
condensation, convection, clouds, short- and longwave
radiation, surface fluxes and vertical diffusion.
Hunt et al. (2007) proposed the LETKF by applying
the ensemble transform Kalman filter (ETKF; Bishop
et al. 2001) algorithm to the local ensemble Kalman
filter (LEKF; Ott et al. 2004). Let X denote an n 3 m
matrix, where n andm denote the system dimension and
ensemble size, respectively, so that each column corre-
sponds to amodel state vector. Them3m analysis error
covariance matrix ~Pa in the ensemble space is written as
~Pa 5 [(m2 1)I /r1 (HdXf )TR21(HdXf )]21
5UD21UT , (1)
[cf. Eqs. (3) and (9) in Miyoshi and Yamane (2007)].
Here, r denotes the covariance inflation factor, and
H,dXf , and R denote the linear observation operator,
background ensemble perturbations, and observation
error covariance matrix, respectively. To solve the ma-
trix inversion of Eq. (1), the LETKF computes the ei-
genvalue decomposition. In addition, U is composed of
the eigenvectors, so thatUUT 5 I. The diagonal matrixD
is composed of the eigenvalues. The ensemble analysis
Xa is obtained from
Xa 5 x f11 dXf [(~Pa)21(HdXf )TR21(yo 2Hx f )1
1ffiffiffiffiffiffiffiffiffiffiffiffiffi
m2 1p
(~Pa)21/2] , (2)
[cf. Eqs. (6) and (7) in Miyoshi and Yamane (2007)].
Here, x f and yo denote the background ensemble mean
and observations, respectively. Here, 1 denotes an
m-dimensional row vector with all elements being 1.
Using the eigenvalue decomposition [Eq. (1)], Eq. (2) is
solved efficiently. The LETKF computes Eqs. (1) and
(2) at every grid point independently, so that the
LETKF can compute Xa efficiently in parallel. In
fact, Miyoshi and Yamane (2007) showed that the paral-
lelization ratio reached 99.99% using up to 240 nodes on
the Japanese Earth Simulator supercomputer.
MKI14 ran a 3-week-long 10240-member SPEEDY–
LETKFexperimentwith a 7303-km localization scale (i.e.,
the Gaussian localization function with SD 5 2000km),
using 4608 nodes of the Japanese flagship K computer.
The K computer has 88 128 nodes with its peak perfor-
mance of 10 petaflops, which ranked number 5 in the
top-500 list as of June 2016 (http://www.top500.org/lists/
2016/06/). As already mentioned in the introduction,
although MKI14 had to apply localization to avoid
memory overflow, in this study the SPEEDY–LETKF
code of MKI14 was improved, so that we could avoid
memory overflow even without localization at all.
3. Experimental settings
The experiments in this study assume the perfect
model following MKI14. The nature run is initialized at
0000 UTC 1 January by the standard atmosphere at rest
(i.e., no wind), and the first year is considered to be a
spinup period. The experimental period is 60 days from
0000 UTC 1 January in the second year of the nature
run. The observational error standard deviations are
fixed to 1.0m s21, 1.0K, 0.1 g kg21, and 1.0 hPa for hor-
izontal wind components, temperature, specific humid-
ity, and surface pressure, respectively. The observations
are simulated by adding independent Gaussian random
numbers to the nature run every 6h at the radiosonde-
like locations (cf. section 4; Fig. 5, cross marks) for all
seven vertical levels, but the observations of specific
humidity are simulated from the bottom to the fourth
model level (about 500 hPa). The number of observa-
tions is 10 816 every 6 h, which is very similar to the
ensemble size of 10 240. Six-hourly data assimilation
cycles are performed.
First, the NOLOC experiment, standing for no local-
ization, is performed using 10 240 ensemble members
without localization at all, either in the horizontal or in
the vertical. NOLOC is equivalent to the global ETKF
theoretically, and an ETKF implementation may be
much more efficient than the LETKF option. However,
for a pure comparison, we use the same LETKF code
with different localization settings even for NOLOC. To
investigate the performance of NOLOC, three addi-
tional experiments are performed with 20, 80, and
320 members, which are often used experimentally or
operationally, and they are called M20, M80, and M320,
respectively (Table 2). The horizontal localization scales
of M20 and M80 with the Gaussian function are manu-
ally tuned to be 2556 and 5112km (SD 5 700 and
1400km), respectively. The localization scale of M320 is
fixed at 7303km (SD5 2000km) following MKI14. The
vertical localization scales for M20, M80, and M320 are
chosen to be SD 5 0.1, 0.2, and 0.3 in the natural loga-
rithm of the pressure coordinate for the Gaussian
function, respectively. Applying the tight vertical lo-
calization is essential for M20, as was the case in the
previous studies using the SPEEDY–LETKF system
(e.g., Miyoshi 2005, 2011; Kang et al. 2012). These ex-
periments are initialized at 0000 UTC 1 January by the
DECEMBER 2016 KONDO AND M IYO SH I 4851
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
initial ensemble states randomly chosen from the long-
term nature runs in December and January after De-
cember of the ninth year. For all experiments, the
adaptive covariance inflation method of Miyoshi (2011)
is applied.
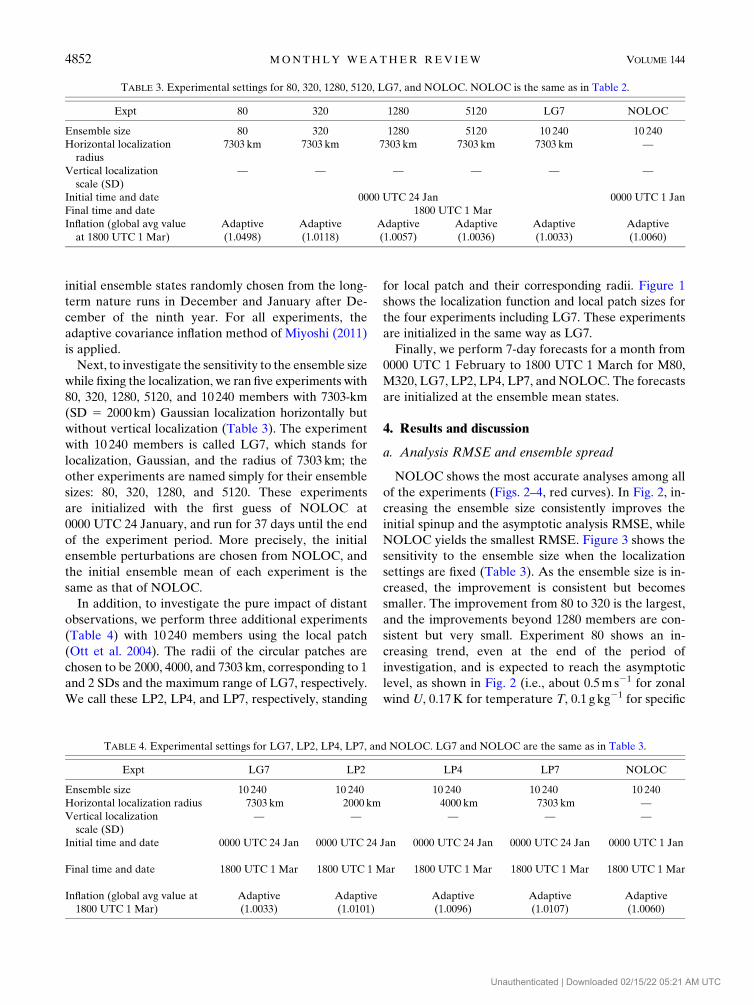
Next, to investigate the sensitivity to the ensemble size
while fixing the localization, we ran five experiments with
80, 320, 1280, 5120, and 10240 members with 7303-km
(SD 5 2000km) Gaussian localization horizontally but
without vertical localization (Table 3). The experiment
with 10 240 members is called LG7, which stands for
localization, Gaussian, and the radius of 7303km; the
other experiments are named simply for their ensemble
sizes: 80, 320, 1280, and 5120. These experiments
are initialized with the first guess of NOLOC at
0000 UTC 24 January, and run for 37 days until the end
of the experiment period. More precisely, the initial
ensemble perturbations are chosen from NOLOC, and
the initial ensemble mean of each experiment is the
same as that of NOLOC.
In addition, to investigate the pure impact of distant
observations, we perform three additional experiments
(Table 4) with 10 240 members using the local patch
(Ott et al. 2004). The radii of the circular patches are
chosen to be 2000, 4000, and 7303km, corresponding to 1
and 2 SDs and the maximum range of LG7, respectively.
We call these LP2, LP4, and LP7, respectively, standing
for local patch and their corresponding radii. Figure 1
shows the localization function and local patch sizes for
the four experiments including LG7. These experiments
are initialized in the same way as LG7.
Finally, we perform 7-day forecasts for a month from
0000 UTC 1 February to 1800 UTC 1 March for M80,
M320, LG7, LP2, LP4, LP7, and NOLOC. The forecasts
are initialized at the ensemble mean states.
4. Results and discussion
a. Analysis RMSE and ensemble spread
NOLOC shows the most accurate analyses among all
of the experiments (Figs. 2–4, red curves). In Fig. 2, in-
creasing the ensemble size consistently improves the
initial spinup and the asymptotic analysis RMSE, while
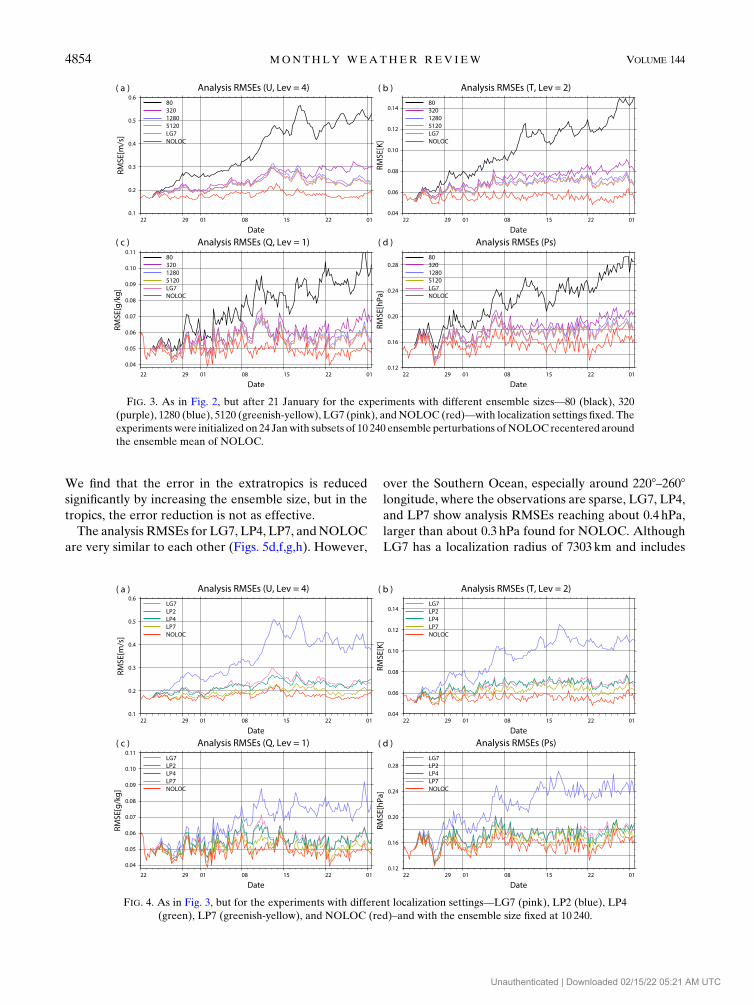
NOLOC yields the smallest RMSE. Figure 3 shows the
sensitivity to the ensemble size when the localization
settings are fixed (Table 3). As the ensemble size is in-
creased, the improvement is consistent but becomes
smaller. The improvement from 80 to 320 is the largest,
and the improvements beyond 1280 members are con-
sistent but very small. Experiment 80 shows an in-
creasing trend, even at the end of the period of
investigation, and is expected to reach the asymptotic
level, as shown in Fig. 2 (i.e., about 0.5m s21 for zonal
wind U, 0.17K for temperature T, 0.1 g kg21 for specific
TABLE 3. Experimental settings for 80, 320, 1280, 5120, LG7, and NOLOC. NOLOC is the same as in Table 2.
Expt 80 320 1280 5120 LG7 NOLOC
Ensemble size 80 320 1280 5120 10 240 10 240
Horizontal localization
radius
7303 km 7303 km 7303 km 7303 km 7303 km —
Vertical localization
scale (SD)
— — — — — —
Initial time and date 0000 UTC 24 Jan 0000 UTC 1 Jan
Final time and date 1800 UTC 1 Mar
Inflation (global avg value
at 1800 UTC 1 Mar)
Adaptive
(1.0498)
Adaptive
(1.0118)
Adaptive
(1.0057)
Adaptive
(1.0036)
Adaptive
(1.0033)
Adaptive
(1.0060)
TABLE 4. Experimental settings for LG7, LP2, LP4, LP7, and NOLOC. LG7 and NOLOC are the same as in Table 3.
Expt LG7 LP2 LP4 LP7 NOLOC
Ensemble size 10 240 10 240 10 240 10 240 10 240
Horizontal localization radius 7303 km 2000 km 4000 km 7303 km —
Vertical localization
scale (SD)
— — — — —
Initial time and date 0000 UTC 24 Jan 0000 UTC 24 Jan 0000 UTC 24 Jan 0000 UTC 24 Jan 0000 UTC 1 Jan
Final time and date 1800 UTC 1 Mar 1800 UTC 1 Mar 1800 UTC 1 Mar 1800 UTC 1 Mar 1800 UTC 1 Mar
Inflation (global avg value at
1800 UTC 1 Mar)
Adaptive
(1.0033)
Adaptive
(1.0101)
Adaptive
(1.0096)
Adaptive
(1.0107)
Adaptive
(1.0060)
4852 MONTHLY WEATHER REV IEW VOLUME 144
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
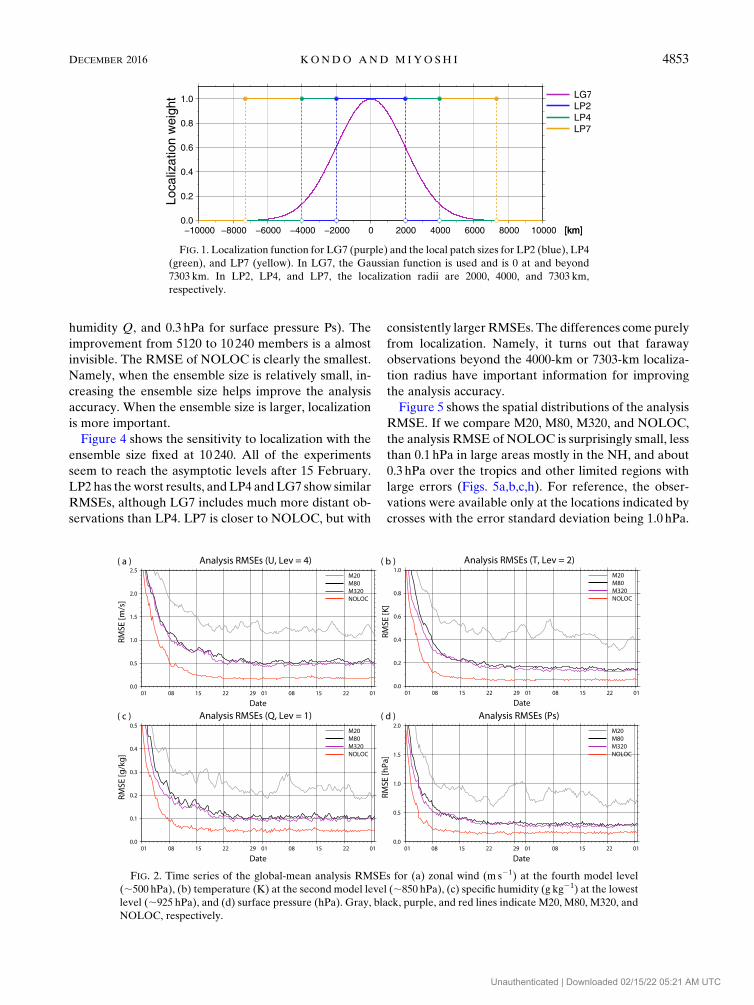
humidity Q, and 0.3 hPa for surface pressure Ps). The
improvement from 5120 to 10 240 members is a almost
invisible. The RMSE of NOLOC is clearly the smallest.
Namely, when the ensemble size is relatively small, in-
creasing the ensemble size helps improve the analysis
accuracy. When the ensemble size is larger, localization
is more important.
Figure 4 shows the sensitivity to localization with the
ensemble size fixed at 10 240. All of the experiments
seem to reach the asymptotic levels after 15 February.
LP2 has the worst results, and LP4 andLG7 show similar
RMSEs, although LG7 includes much more distant ob-
servations than LP4. LP7 is closer to NOLOC, but with
consistently larger RMSEs. The differences come purely
from localization. Namely, it turns out that faraway
observations beyond the 4000-km or 7303-km localiza-
tion radius have important information for improving
the analysis accuracy.
Figure 5 shows the spatial distributions of the analysis
RMSE. If we compare M20, M80, M320, and NOLOC,
the analysis RMSE of NOLOC is surprisingly small, less
than 0.1 hPa in large areas mostly in the NH, and about
0.3 hPa over the tropics and other limited regions with
large errors (Figs. 5a,b,c,h). For reference, the obser-
vations were available only at the locations indicated by
crosses with the error standard deviation being 1.0 hPa.
FIG. 1. Localization function for LG7 (purple) and the local patch sizes for LP2 (blue), LP4
(green), and LP7 (yellow). In LG7, the Gaussian function is used and is 0 at and beyond
7303 km. In LP2, LP4, and LP7, the localization radii are 2000, 4000, and 7303 km,
respectively.
FIG. 2. Time series of the global-mean analysis RMSEs for (a) zonal wind (m s21) at the fourth model level
(;500 hPa), (b) temperature (K) at the second model level (;850 hPa), (c) specific humidity (g kg21) at the lowest
level (;925 hPa), and (d) surface pressure (hPa). Gray, black, purple, and red lines indicate M20, M80, M320, and
NOLOC, respectively.
DECEMBER 2016 KONDO AND M IYO SH I 4853
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
We find that the error in the extratropics is reduced
significantly by increasing the ensemble size, but in the
tropics, the error reduction is not as effective.
The analysis RMSEs for LG7, LP4, LP7, andNOLOC
are very similar to each other (Figs. 5d,f,g,h). However,
over the Southern Ocean, especially around 2208–2608longitude, where the observations are sparse, LG7, LP4,
and LP7 show analysis RMSEs reaching about 0.4 hPa,
larger than about 0.3 hPa found for NOLOC. Although
LG7 has a localization radius of 7303km and includes
FIG. 3. As in Fig. 2, but after 21 January for the experiments with different ensemble sizes—80 (black), 320
(purple), 1280 (blue), 5120 (greenish-yellow), LG7 (pink), and NOLOC (red)—with localization settings fixed. The
experiments were initialized on 24 Janwith subsets of 10 240 ensemble perturbations of NOLOC recentered around
the ensemble mean of NOLOC.
FIG. 4. As in Fig. 3, but for the experiments with different localization settings—LG7 (pink), LP2 (blue), LP4
(green), LP7 (greenish-yellow), and NOLOC (red)–and with the ensemble size fixed at 10 240.
4854 MONTHLY WEATHER REV IEW VOLUME 144
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
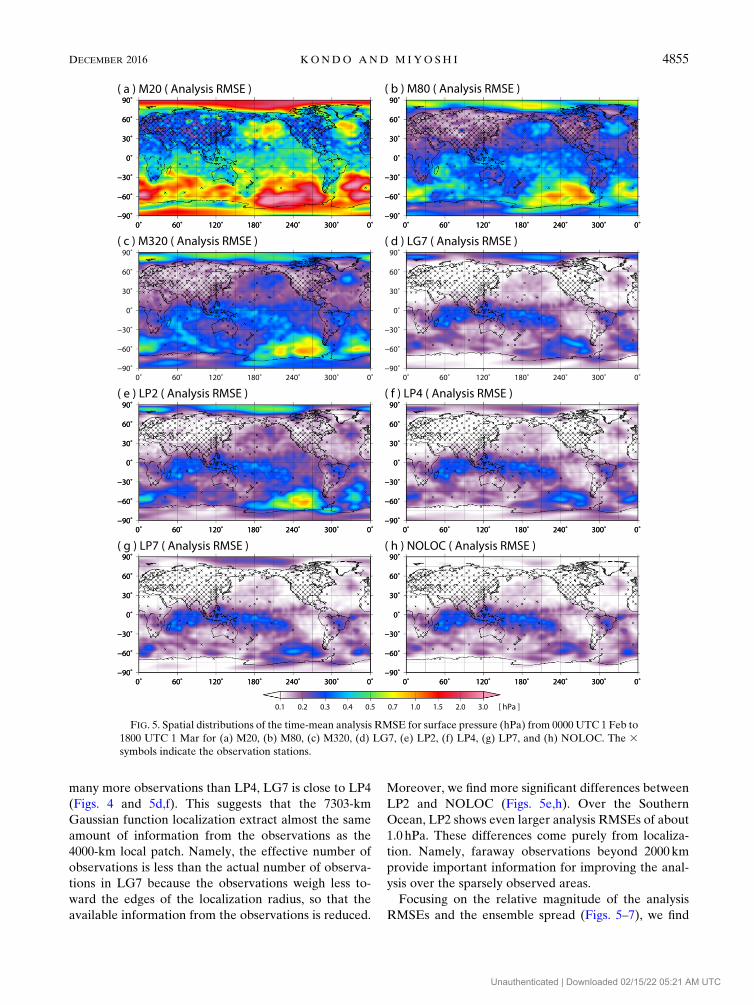
many more observations than LP4, LG7 is close to LP4
(Figs. 4 and 5d,f). This suggests that the 7303-km
Gaussian function localization extract almost the same
amount of information from the observations as the
4000-km local patch. Namely, the effective number of
observations is less than the actual number of observa-
tions in LG7 because the observations weigh less to-
ward the edges of the localization radius, so that the
available information from the observations is reduced.
Moreover, we find more significant differences between
LP2 and NOLOC (Figs. 5e,h). Over the Southern
Ocean, LP2 shows even larger analysis RMSEs of about
1.0 hPa. These differences come purely from localiza-
tion. Namely, faraway observations beyond 2000km
provide important information for improving the anal-
ysis over the sparsely observed areas.
Focusing on the relative magnitude of the analysis
RMSEs and the ensemble spread (Figs. 5–7), we find
FIG. 5. Spatial distributions of the time-mean analysis RMSE for surface pressure (hPa) from 0000 UTC 1 Feb to
1800 UTC 1 Mar for (a) M20, (b) M80, (c) M320, (d) LG7, (e) LP2, (f) LP4, (g) LP7, and (h) NOLOC. The 3symbols indicate the observation stations.
DECEMBER 2016 KONDO AND M IYO SH I 4855
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
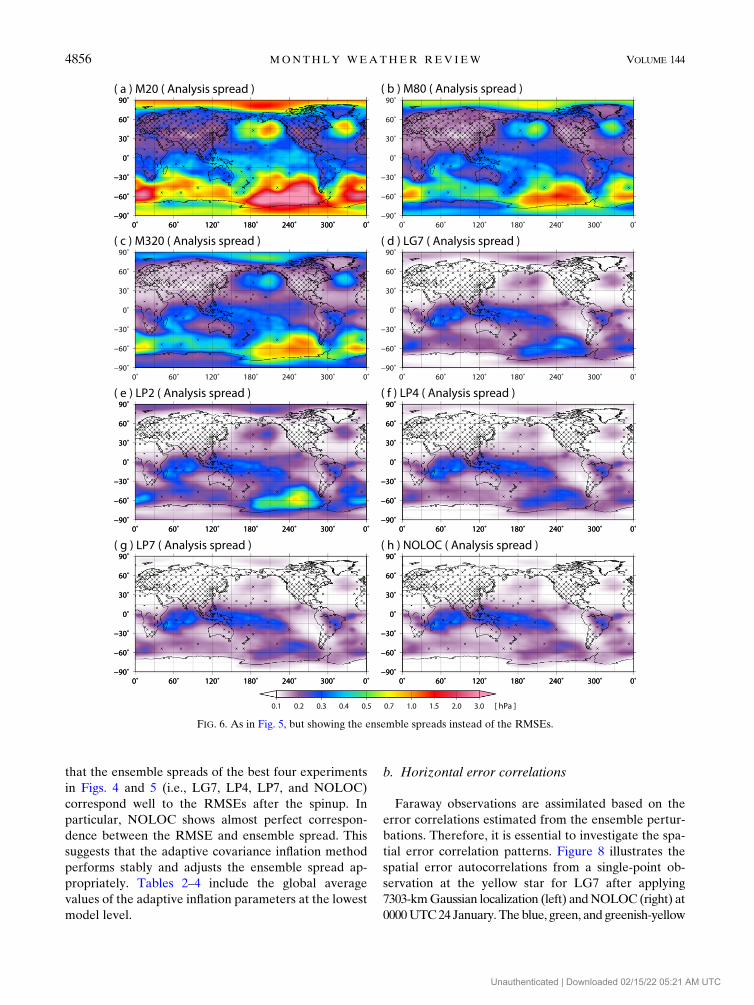
that the ensemble spreads of the best four experiments
in Figs. 4 and 5 (i.e., LG7, LP4, LP7, and NOLOC)
correspond well to the RMSEs after the spinup. In
particular, NOLOC shows almost perfect correspon-
dence between the RMSE and ensemble spread. This
suggests that the adaptive covariance inflation method
performs stably and adjusts the ensemble spread ap-
propriately. Tables 2–4 include the global average
values of the adaptive inflation parameters at the lowest
model level.
b. Horizontal error correlations
Faraway observations are assimilated based on the
error correlations estimated from the ensemble pertur-
bations. Therefore, it is essential to investigate the spa-
tial error correlation patterns. Figure 8 illustrates the
spatial error autocorrelations from a single-point ob-
servation at the yellow star for LG7 after applying
7303-kmGaussian localization (left) andNOLOC (right) at
0000UTC24 January. The blue, green, and greenish-yellow
FIG. 6. As in Fig. 5, but showing the ensemble spreads instead of the RMSEs.
4856 MONTHLY WEATHER REV IEW VOLUME 144
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
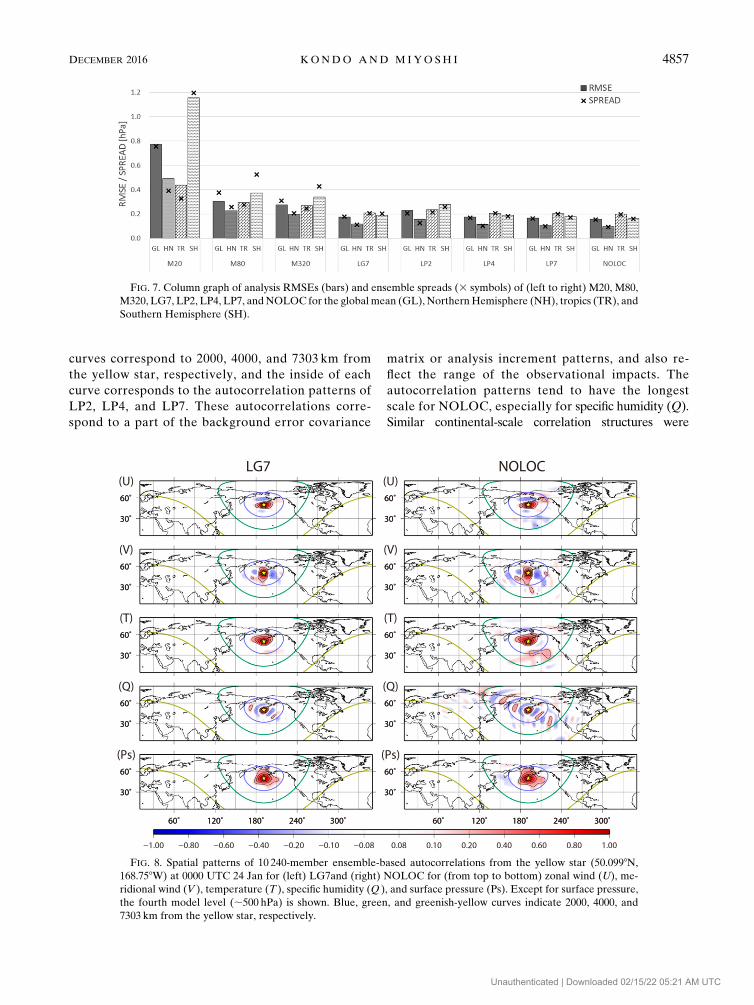
curves correspond to 2000, 4000, and 7303 km from
the yellow star, respectively, and the inside of each
curve corresponds to the autocorrelation patterns of
LP2, LP4, and LP7. These autocorrelations corre-
spond to a part of the background error covariance
matrix or analysis increment patterns, and also re-
flect the range of the observational impacts. The
autocorrelation patterns tend to have the longest
scale for NOLOC, especially for specific humidity (Q).
Similar continental-scale correlation structures were
FIG. 7. Column graph of analysis RMSEs (bars) and ensemble spreads (3 symbols) of (left to right) M20, M80,
M320, LG7, LP2, LP4, LP7, andNOLOC for the global mean (GL), NorthernHemisphere (NH), tropics (TR), and
Southern Hemisphere (SH).
FIG. 8. Spatial patterns of 10 240-member ensemble-based autocorrelations from the yellow star (50.0998N,
168.758W) at 0000 UTC 24 Jan for (left) LG7and (right) NOLOC for (from top to bottom) zonal wind (U), me-
ridional wind (V ), temperature (T ), specific humidity (Q ), and surface pressure (Ps). Except for surface pressure,
the fourth model level (;500 hPa) is shown. Blue, green, and greenish-yellow curves indicate 2000, 4000, and
7303 km from the yellow star, respectively.
DECEMBER 2016 KONDO AND M IYO SH I 4857
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
reported in MKI14. Bishop et al. (2003) also showed a
long-range signal in the analysis increment by
assimilating a single observation. The zonally elon-
gated wave patterns are greatly shortened in LG7 as a
result of localization. Although the correlations of
LG7 are mostly concentrated within a 2000-km range,
the LG7 has a similar analysis accuracy to LP4, not
LP2. The correlation of LP2 is suddenly cut at 2000 km,
but LG7 has a long-range correlation though the cor-
relation beyond the 2000-km range is smaller than 0.1.
The localization radii of LP4 and LP7 capture almost
the entire correlation patterns of NOLOC, although
for humidity the localization radius of LP4 seems to be
insufficient. This agrees with the results that the anal-
ysis RMSEs of LP7 are very similar to those of NOLOC
but with slight degradations. We would expect that
LG7, LP4, LP7, and NOLOC effectively use ob-
servational information from distant observations, and
assimilating such faraway information would help im-
prove the analysis.
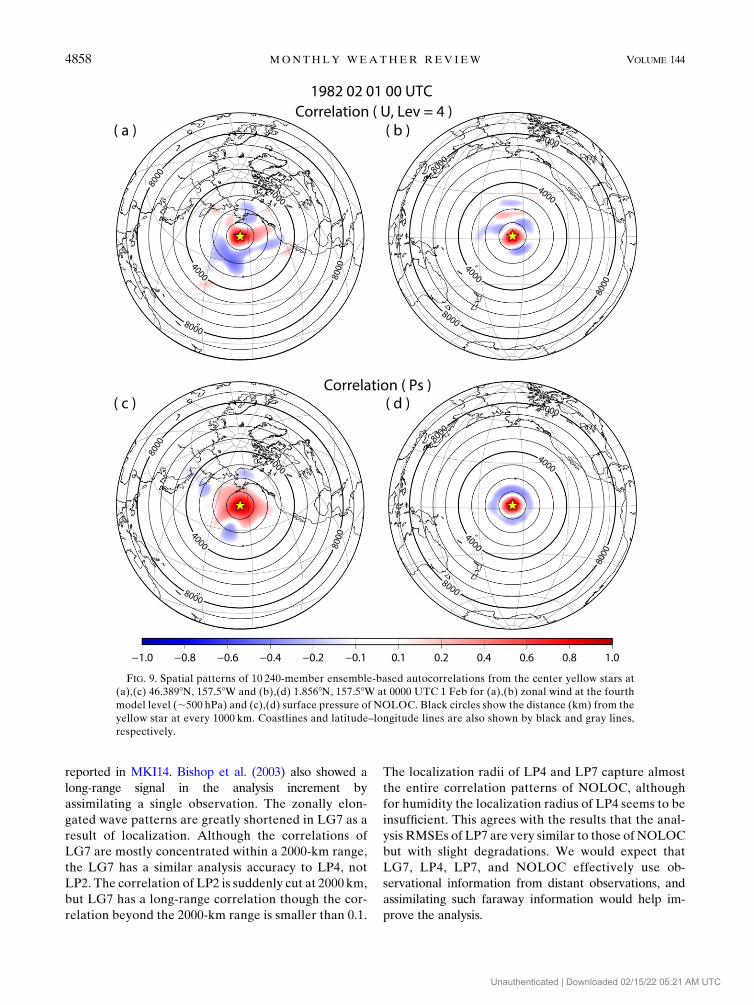
FIG. 9. Spatial patterns of 10 240-member ensemble-based autocorrelations from the center yellow stars at
(a),(c) 46.3898N, 157.58W and (b),(d) 1.8568N, 157.58W at 0000 UTC 1 Feb for (a),(b) zonal wind at the fourth
model level (;500 hPa) and (c),(d) surface pressure of NOLOC. Black circles show the distance (km) from the
yellow star at every 1000 km. Coastlines and latitude–longitude lines are also shown by black and gray lines,
respectively.
4858 MONTHLY WEATHER REV IEW VOLUME 144
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
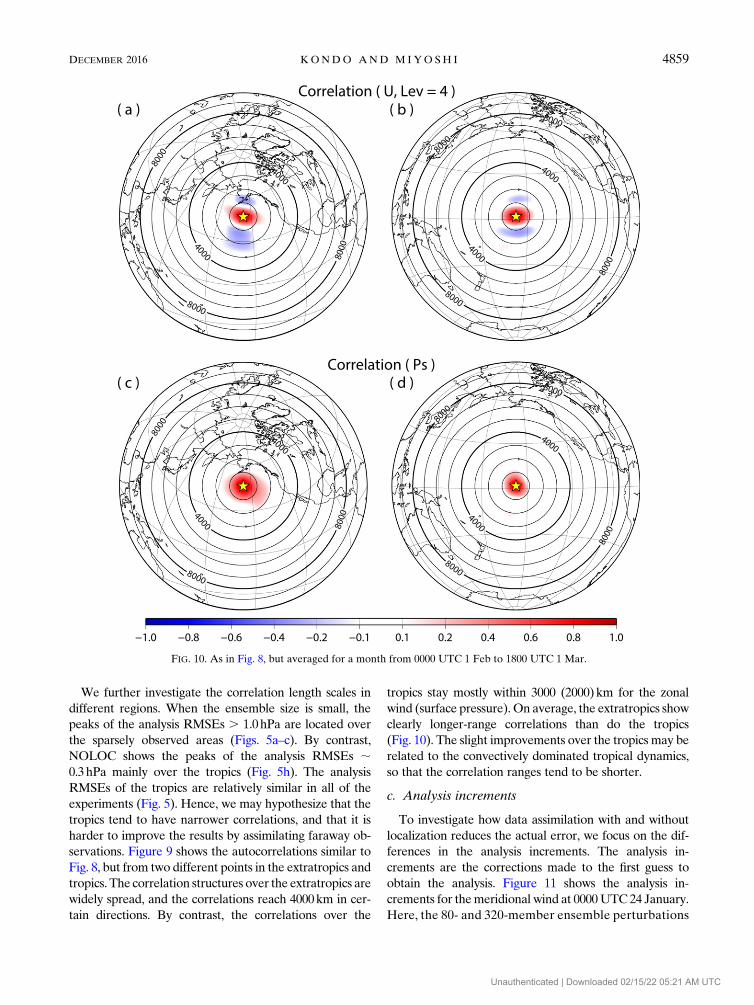
We further investigate the correlation length scales in
different regions. When the ensemble size is small, the
peaks of the analysis RMSEs . 1.0hPa are located over
the sparsely observed areas (Figs. 5a–c). By contrast,
NOLOC shows the peaks of the analysis RMSEs ;0.3hPa mainly over the tropics (Fig. 5h). The analysis
RMSEs of the tropics are relatively similar in all of the
experiments (Fig. 5). Hence, we may hypothesize that the
tropics tend to have narrower correlations, and that it is
harder to improve the results by assimilating faraway ob-
servations. Figure 9 shows the autocorrelations similar to
Fig. 8, but from two different points in the extratropics and
tropics. The correlation structures over the extratropics are
widely spread, and the correlations reach 4000km in cer-
tain directions. By contrast, the correlations over the
tropics stay mostly within 3000 (2000)km for the zonal
wind (surface pressure).On average, the extratropics show
clearly longer-range correlations than do the tropics
(Fig. 10). The slight improvements over the tropics may be
related to the convectively dominated tropical dynamics,
so that the correlation ranges tend to be shorter.
c. Analysis increments
To investigate how data assimilation with and without
localization reduces the actual error, we focus on the dif-
ferences in the analysis increments. The analysis in-
crements are the corrections made to the first guess to
obtain the analysis. Figure 11 shows the analysis in-
crements for themeridional wind at 0000UTC 24 January.
Here, the 80- and 320-member ensemble perturbations
FIG. 10. As in Fig. 8, but averaged for a month from 0000 UTC 1 Feb to 1800 UTC 1 Mar.
DECEMBER 2016 KONDO AND M IYO SH I 4859
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
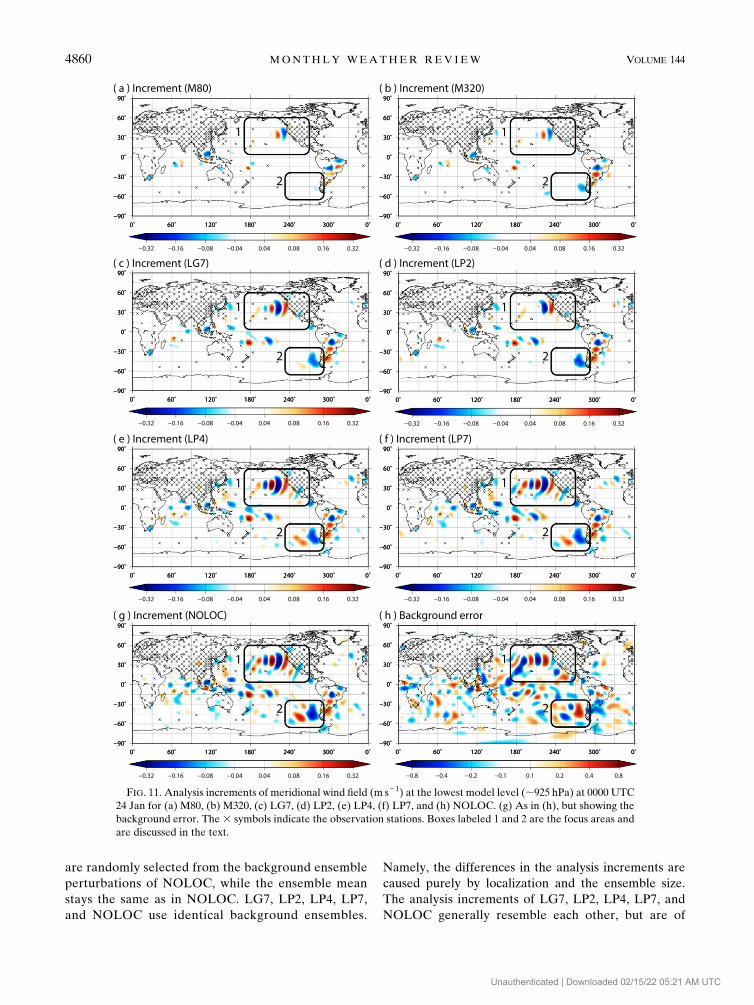
are randomly selected from the background ensemble
perturbations of NOLOC, while the ensemble mean
stays the same as in NOLOC. LG7, LP2, LP4, LP7,
and NOLOC use identical background ensembles.
Namely, the differences in the analysis increments are
caused purely by localization and the ensemble size.
The analysis increments of LG7, LP2, LP4, LP7, and
NOLOC generally resemble each other, but are of
FIG. 11. Analysis increments of meridional wind field (m s21) at the lowest model level (;925 hPa) at 0000 UTC
24 Jan for (a) M80, (b) M320, (c) LG7, (d) LP2, (e) LP4, (f) LP7, and (h) NOLOC. (g) As in (h), but showing the
background error. The 3 symbols indicate the observation stations. Boxes labeled 1 and 2 are the focus areas and
are discussed in the text.
4860 MONTHLY WEATHER REV IEW VOLUME 144
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
different magnitudes (Figs. 11c–g). By contrast, 80 and 320
members have generally much smaller analysis increments
(Figs. 11a,b).We focus on the areas surrounded by boxes 1
and 2, where we find relatively large analysis increments.
All 10240-member experiments capture the zonal wave
pattern in area 1, which reduces the background error
(Fig. 11h). The wave patterns are stronger in LG7, LP4,
LP7, and NOLOC, and weaker in LP2. LP2 misses the
signal over the western part of area 1 (Fig. 11d). Similar
discussions can be applied to area 2. In the western part
of area 2, LP2 does not create anything. As a result,
relatively large analysis errors remain in LP2. By con-
trast, LG7, LP4, LP7, and NOLOC create large ampli-
tudes of the analysis increments, although the analysis
increment of LG7 is relatively weak. Therefore, longer-
range localization has a large impact across the sparsely
observed areas by assimilating faraway observations,
whereas even if the localization radius is long, as in LG7,
the Gaussian function localization reduces the obser-
vation impact. Namely, Fig. 11 suggests that the amount
of observation information for LG7 be lower than for
LP4, although the Gaussian function localization with
SD 5 2000 km has the same range as LP7.
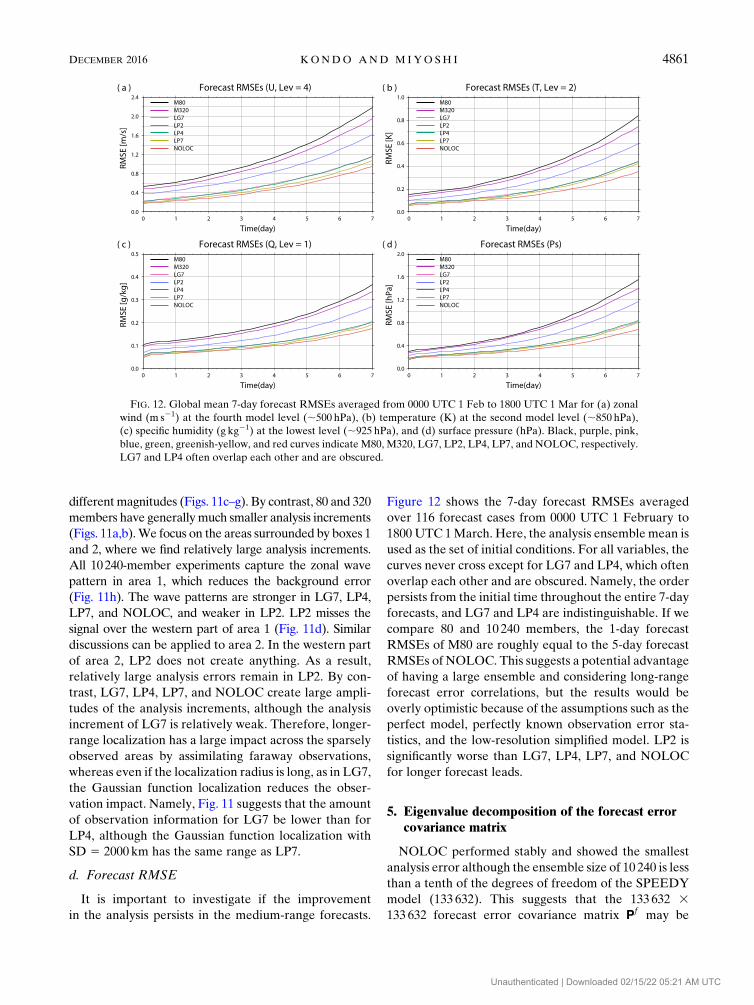
d. Forecast RMSE
It is important to investigate if the improvement
in the analysis persists in the medium-range forecasts.
Figure 12 shows the 7-day forecast RMSEs averaged
over 116 forecast cases from 0000 UTC 1 February to
1800 UTC 1March. Here, the analysis ensemble mean is
used as the set of initial conditions. For all variables, the
curves never cross except for LG7 and LP4, which often
overlap each other and are obscured. Namely, the order
persists from the initial time throughout the entire 7-day
forecasts, and LG7 and LP4 are indistinguishable. If we
compare 80 and 10 240 members, the 1-day forecast
RMSEs of M80 are roughly equal to the 5-day forecast
RMSEs of NOLOC. This suggests a potential advantage
of having a large ensemble and considering long-range
forecast error correlations, but the results would be
overly optimistic because of the assumptions such as the
perfect model, perfectly known observation error sta-
tistics, and the low-resolution simplified model. LP2 is
significantly worse than LG7, LP4, LP7, and NOLOC
for longer forecast leads.
5. Eigenvalue decomposition of the forecast errorcovariance matrix
NOLOC performed stably and showed the smallest
analysis error although the ensemble size of 10 240 is less
than a tenth of the degrees of freedom of the SPEEDY
model (133 632). This suggests that the 133 632 3133 632 forecast error covariance matrix Pf may be
FIG. 12. Global mean 7-day forecast RMSEs averaged from 0000 UTC 1 Feb to 1800 UTC 1 Mar for (a) zonal
wind (m s21) at the fourth model level (;500 hPa), (b) temperature (K) at the second model level (;850 hPa),
(c) specific humidity (g kg21) at the lowest level (;925 hPa), and (d) surface pressure (hPa). Black, purple, pink,
blue, green, greenish-yellow, and red curves indicate M80, M320, LG7, LP2, LP4, LP7, and NOLOC, respectively.
LG7 and LP4 often overlap each other and are obscured.
DECEMBER 2016 KONDO AND M IYO SH I 4861
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
estimated accurately from the 10 240-member ensemble.
Usually, it is difficult to compute the explicit eigenvalue
decomposition of Pf mainly because of the large
dimensionality of Pf . Here, we take advantage of
the K computer and attempt to compute the eigenvalue
decomposition of the 133 632 3 133 632 covariance
matrix explicitly.
Using the efficient eigenvalue decomposition soft-
ware EigenExa (Imamura et al. 2011), MKI14 re-
ported the acceleration of the computations of the
10240-member LETKF by a factor of 8. Here, we take
advantage of EigenExa and solve the eigenvalue
decomposition ofP f. EigenExa is appliedwith 2304 nodes
on the K computer, and the eigenvalues and eigenvectors
of P f are obtained within about 3min. As a preprocess of
the eigenvalue decomposition, the variables are normal-
ized to have equal weights. Namely, the latitude-weighted
dX f is calculated by multiplying by(cosl)1/2, where l de-
notes the latitude. In addition, the latitude-weighted dX f
is normalized by the standard deviation of each variable
and at every vertical level. When we plot eigenvectors in
the horizontal, we divide by (cosl)1/2.
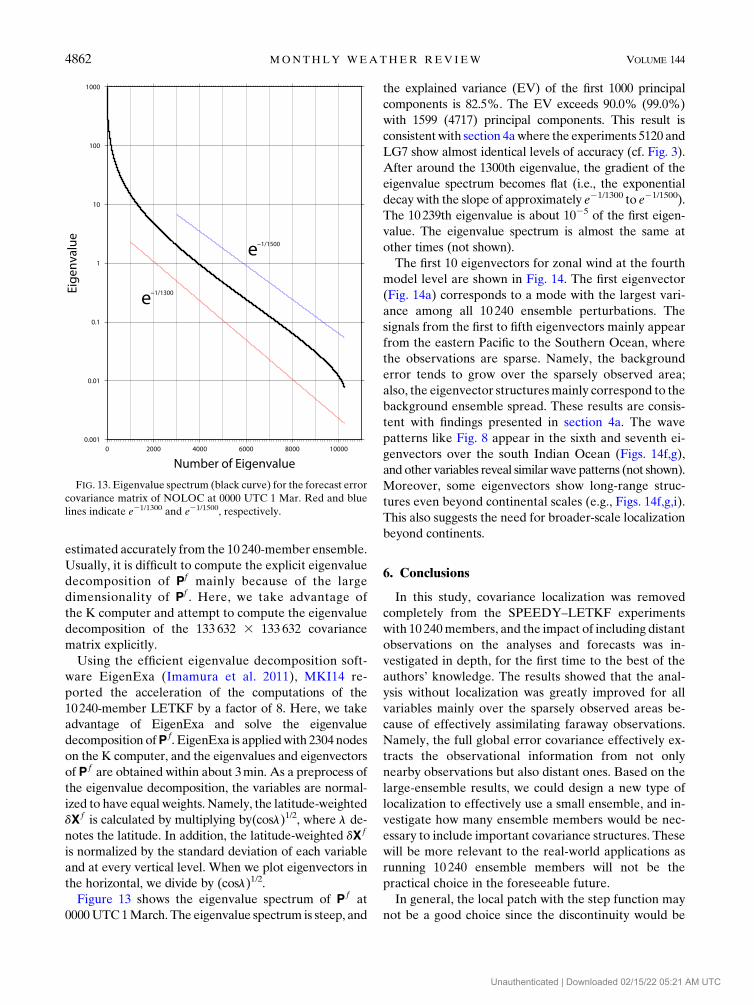
Figure 13 shows the eigenvalue spectrum of P f at
0000UTC1March. The eigenvalue spectrum is steep, and
the explained variance (EV) of the first 1000 principal
components is 82.5%. The EV exceeds 90.0% (99.0%)
with 1599 (4717) principal components. This result is
consistentwith section 4awhere the experiments 5120 and
LG7 show almost identical levels of accuracy (cf. Fig. 3).
After around the 1300th eigenvalue, the gradient of the
eigenvalue spectrum becomes flat (i.e., the exponential
decay with the slope of approximately e21/1300 to e21/1500).
The 10239th eigenvalue is about 1025 of the first eigen-
value. The eigenvalue spectrum is almost the same at
other times (not shown).
The first 10 eigenvectors for zonal wind at the fourth
model level are shown in Fig. 14. The first eigenvector
(Fig. 14a) corresponds to a mode with the largest vari-
ance among all 10 240 ensemble perturbations. The
signals from the first to fifth eigenvectors mainly appear
from the eastern Pacific to the Southern Ocean, where
the observations are sparse. Namely, the background
error tends to grow over the sparsely observed area;
also, the eigenvector structuresmainly correspond to the
background ensemble spread. These results are consis-
tent with findings presented in section 4a. The wave
patterns like Fig. 8 appear in the sixth and seventh ei-
genvectors over the south Indian Ocean (Figs. 14f,g),
and other variables reveal similarwave patterns (not shown).
Moreover, some eigenvectors show long-range struc-
tures even beyond continental scales (e.g., Figs. 14f,g,i).
This also suggests the need for broader-scale localization
beyond continents.
6. Conclusions
In this study, covariance localization was removed
completely from the SPEEDY–LETKF experiments
with 10 240members, and the impact of including distant
observations on the analyses and forecasts was in-
vestigated in depth, for the first time to the best of the
authors’ knowledge. The results showed that the anal-
ysis without localization was greatly improved for all
variables mainly over the sparsely observed areas be-
cause of effectively assimilating faraway observations.
Namely, the full global error covariance effectively ex-
tracts the observational information from not only
nearby observations but also distant ones. Based on the
large-ensemble results, we could design a new type of
localization to effectively use a small ensemble, and in-
vestigate how many ensemble members would be nec-
essary to include important covariance structures. These
will be more relevant to the real-world applications as
running 10 240 ensemble members will not be the
practical choice in the foreseeable future.
In general, the local patch with the step function may
not be a good choice since the discontinuity would be
FIG. 13. Eigenvalue spectrum (black curve) for the forecast error
covariance matrix of NOLOC at 0000 UTC 1 Mar. Red and blue
lines indicate e21/1300 and e21/1500, respectively.
4862 MONTHLY WEATHER REV IEW VOLUME 144
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
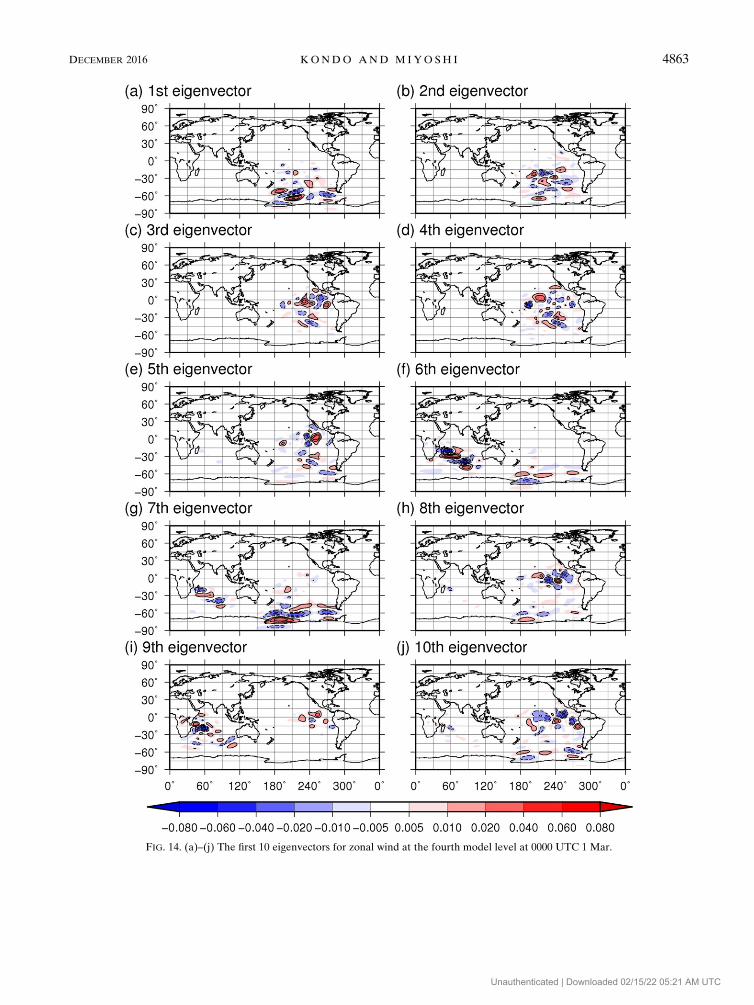
FIG. 14. (a)–(j) The first 10 eigenvectors for zonal wind at the fourth model level at 0000 UTC 1 Mar.
DECEMBER 2016 KONDO AND M IYO SH I 4863
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC

problematic. Oczkowski et al. (2005), Kuhl et al. (2007),
and Satterfield and Szunyogh (2010, 2011) discussed the
ensemble E dimension using the ensemble size up to
about 150. This study is somewhat different from pre-
vious examples because of the orders of magnitude
larger ensemble size, which allowed us to apply the
larger-scale local patches and Gaussian function locali-
zation without severe problems.
The ensemble size of 10 240 is very close to 10 816, the
number of observations, so that the ensemble nearly
spans the observation space. This is not usually the case
in the real atmosphere, where the number of observa-
tions is much larger than 105. It is an open question if no
localization is a better choice when the ensemble can
span only a fraction of the observation space. This
should be investigated in future research efforts.
This study focused on the impact of localization and
different ensemble sizes. Recently, using a hybrid
covariance matrix between climatological component
and ensemble-based flow-dependent component
became a viable choice in the operational systems
(Hamill and Snyder 2000; Wang et al. 2013; Kleist and
Ide 2015; Clayton et al. 2013). It would be an in-
teresting future issue to investigate the effects of in-
cluding climatological components to represent the
large scale covariance structure, compared with the
flow-dependent covariance structure estimated with
the large ensemble.
The experiments in this study were implemented un-
der the perfect model scenario and were only simula-
tions, not representing the real atmosphere. Also, the
SPEEDY model is an intermediate AGCM with simpli-
fied physics and resolves only up to 30 horizontal wave-
numbers with seven vertical levels. Higher-resolution
models represent finer-scale structures, and the eigen-
value spectrum should be less steep. Hence, the rank of
the background error covariance matrix would be larger,
and a larger ensemble size would be necessary. Yet,
Miyoshi et al. (2015) reported that their 10 240-member
LETKF experiments for the real atmosphere also
showed long-range error correlations with real-world
observations using the state-of-the-art NICAM at
112-km resolution with 40 vertical levels. An important
next step would be to investigate if including distant
observations helps improve the real-world NWP.
Acknowledgments. The EigenExa software (http://
www.aics.riken.jp/labs/lpnctrt/EigenExa_e.html) plays an
essential role in solving the eigenvalues for 10240 310240 dense real symmetric matrices and is kindly pro-
vided by T. Imamura of Large-Scale Parallel Numerical
Computing Technology Research Team, RIKEN AICS.
The SPEEDY–LETKF code is publicly available online
(http://code.google.com/p/miyoshi/). We are grateful to
the members of the Data Assimilation Research Team,
RIKEN AICS, for fruitful discussions. Results were, in
part, obtained by using the K computer at the RIKEN
AICS through Proposals ra000015 and hp150019. This
study was partly supported by CREST, JST, and JSPS
KAKENHI Grant JP16K17806.
REFERENCES
Bishop, C. H., B. J. Etherton, and S. J. Majumdar, 2001: Adaptive
sampling with the ensemble transform Kalman filter. Part I:
Theoretical aspects. Mon. Wea. Rev., 129, 420–436, doi:10.1175/
1520-0493(2001)129,0420:ASWTET.2.0.CO;2.
——, C. A. Reynolds, andM. K. Tippett, 2003: Optimization of the
fixed global observing network in a simple model. J. Atmos.
Sci., 60, 1471–1489, doi:10.1175/1520-0469(2003)060,1471:
OOTFGO.2.0.CO;2.
Clayton, A.M., A. C. Lorenc, andD.M. Barker, 2013: Operational
implementation of a hybrid ensemble/4D-Var global data as-
similation system at the Met Office. Quart. J. Roy. Meteor.
Soc., 139, 1445–1461, doi:10.1002/qj.2054.
Evensen, G., 1994: Sequential data assimilation with a nonlinear
quasi-geostrophic model using Monte Carlo methods to
forecast error statistics. J. Geophys. Res., 99, 10 143–10 162,
doi:10.1029/94JC00572.
Flowerdew, J., 2015: Towards a theory of optimal localisation.
Tellus, 67A, 25257, doi:10.3402/tellusa.v67.25257.
Gaspari, G., and S. E. Cohn, 1999: Construction of correlation
functions in two and three dimensions. Quart. J. Roy. Meteor.
Soc., 125, 723–757, doi:10.1002/qj.49712555417.
Greybush, S. J., E. Kalnay, T.Miyoshi, K. Ide, and B. R.Hunt, 2011:
Balance and ensemble Kalman filter localization techniques.
Mon. Wea. Rev., 139, 511–522, doi:10.1175/2010MWR3328.1.
Hamill, T. M., and C. Snyder, 2000: A hybrid ensemble Kalman
filter–3D variational analysis scheme. Mon. Wea. Rev.,
128, 2905–2919, doi:10.1175/1520-0493(2000)128,2905:
AHEKFV.2.0.CO;2.
——, J. S. Whitakaer, and C. Snyder, 2001: Distance-dependent
filtering of background error covariance estimates in an en-
semble Kalman filter. Mon. Wea. Rev., 129, 2776–2790,
doi:10.1175/1520-0493(2001)129,2776:DDFOBE.2.0.CO;2.
Houtekamer, P. L., and H. L. Mitchell, 1998: Data assimila-
tion using an ensemble Kalman filter technique. Mon. Wea.
Rev., 126, 796–811, doi:10.1175/1520-0493(1998)126,0796:
DAUAEK.2.0.CO;2.
Hunt, B. R., E. J. Kostelich, and I. Syzunogh, 2007: Efficient data
assimilation for spatiotemporal chaos: A local ensemble
transformKalman filter. Physica D, 230, 112–126, doi:10.1016/
j.physd.2006.11.008.
Imamura, T., S. Yamada, and M. Machida, 2011: Development of a
high performance eigensolver on the peta-scale next-generation
supercomputer system. Prog. Nucl. Sci. Technol., 2, 643–650,
doi:10.15669/pnst.2.643.
Kalman, R. E., 1960: A new approach to linear filtering and pre-
dicted problems. J. Basic Eng., 82, 35–45, doi:10.1115/
1.3662552.
Kang, J.-S., E. Kalnay, T. Miyoshi, J. Liu, and I. Fung, 2012: Esti-
mation of surface carbon fluxes with an advanced data as-
similation methodology. J. Geophys. Res., 117, D24101,
doi:10.1029/2012JD018259.
4864 MONTHLY WEATHER REV IEW VOLUME 144
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC
Kleist, D. T., and K. Ide, 2015: An OSSE-based evaluation of hy-
brid variational–ensemble data assimilation for the NCEP
GFS. Part I: System description and 3D-hybrid results. Mon.
Wea. Rev., 143, 433–451, doi:10.1175/MWR-D-13-00351.1.
Kondo, K., and H. L. Tanaka, 2009: Applying the local ensemble
transform Kalman filter to the Nonhydrostatic Icosahedral
AtmosphericModel (NICAM).SOLA, 5, 121–124, doi:10.2151/
sola.2009-031.
——, T. Miyoshi, and H. L. Tanaka, 2013: Parameter sensitivities
of the dual-localization approach in the local ensemble
transform Kalman filter. SOLA, 9, 174–178, doi:10.2151/
sola.2013-039.
Kuhl, D., and Coauthors, 2007: Assessing predictability with a
local ensemble Kalman filter. J. Atmos. Sci., 64, 1116–1140,
doi:10.1175/JAS3885.1.
Kunii, M., 2014: Mesoscale data assimilation for a local severe
rainfall event with the NHM-LETKF system. Wea. Fore-
casting, 29, 1093–1105, doi:10.1175/WAF-D-13-00032.1.
Ménétrier, B., T. Montmerle, Y. Michel, and L. Berre, 2015a:
Linear filtering of sample covariances for ensemble-based
data assimilation. Part I: Optimality criteria and application to
variance filtering and covariance localization.Mon.Wea. Rev.,
143, 1622–1643, doi:10.1175/MWR-D-14-00157.1.
——, ——, ——, and ——, 2015b: Linear filtering of sample co-
variances for ensemble-based data assimilation. Part II: Ap-
plication to a convective-scale NWP model. Mon. Wea. Rev.,
143, 1644–1664, doi:10.1175/MWR-D-14-00156.1.
Miyoshi, T., 2005: Ensemble Kalman filter experiments with a
primitive-equation global model. Ph.D. thesis, University of
Maryland, College Park, 226 pp. [Available online at http://
drum.lib.umd.edu/handle/1903/3046.]
——, 2011: TheGaussian approach to adaptive covariance inflation
and its implementation with the local ensemble transform
Kalman filter. Mon. Wea. Rev., 139, 1519–1535, doi:10.1175/2010MWR3570.1.
——, and S. Yamane, 2007: Local ensemble transform Kalman
filtering with an AGCM at a T159/L48 resolution. Mon. Wea.
Rev., 135, 3841–3861, doi:10.1175/2007MWR1873.1.
——, and M. Kunii, 2012: The local ensemble transform Kalman
filter with the Weather Research and Forecasting Model:
Experiments with real observations. Pure Appl. Geophys.,
169, 321–333, doi:10.1007/s00024-011-0373-4.
——, and K. Kondo, 2013: A multi-scale localization approach to
an ensemble Kalman filter. SOLA, 9, 170–173, doi:10.2151/
sola.2013-038.
——, S. Yoshiaki, and T. Kadowaki, 2010: Ensemble Kalman filter
and 4D-Var intercomparison with the Japanese operational
global analysis and prediction system. Mon. Wea. Rev., 138,
2846–2866, doi:10.1175/2010MWR3209.1.
——, K. Kondo, and T. Imamura, 2014: 10240-member ensemble
Kalman filtering with an intermediate AGCM.Geophys. Res.
Lett., 41, 5264–5271, doi:10.1002/2014GL060863.
——, ——, and K. Terasaki, 2015: Numerical weather prediction
with big ensemble data assimilation. Computer, 48, 15–21,
doi:10.1109/MC.2015.332.
Molteni, F., 2003: Atmospheric simulations using a GCM with
simplified physical parametrizations. I: Model climatology and
variability in multi-decadal experiments. Climate Dyn., 20,
175–191, doi:10.1007/s00382-002-0268-2.
Oczkowski, M., I. Szunyogh, and D. J. Patil, 2005: Mechanisms for
the development of locally low dimensional atmospheric dy-
namics. J. Atmos. Sci., 62, 1135–1156, doi:10.1175/JAS3403.1.
Ott, E., and Coauthors, 2004: A local ensemble Kalman filter for
atmospheric data assimilation.Tellus, 56A, 415–428, doi:10.1111/
j.1600-0870.2004.00076.x.
Perianez, A., H. Reich, and R. Potthast, 2014: Optimal localization
for ensemble Kalman filter systems. J. Meteor. Soc. Japan, 92,585–597, doi:10.2151/jmsj.2014-605.
Rainwater, S., and B. Hunt, 2013: Mixed-resolution ensemble data
assimilation. Mon. Wea. Rev., 141, 3007–3021, doi:10.1175/
MWR-D-12-00234.1.
Satoh,M., T.Matsuno, H. Tomita, H.Miura, T. Nasuno, and S. Iga,
2008: Nonhydrostatic Icosahedral Atmospheric Model
(NICAM) for global cloud resolving simulations. J. Comput.
Phys., 227, 3486–3514, doi:10.1016/j.jcp.2007.02.006.——, and Coauthors, 2014: The Non-hydrostatic Icosahedral At-
mospheric Model: Description and development. Prog. Earth
Planet. Sci., 1, 18, doi:10.1186/s40645-014-0018-1.Satterfield, E. A., and I. Szunyogh, 2010: Predictability of the
performance of an ensemble forecast system: Predictability of
the space of uncertainties. Mon. Wea. Rev., 138, 962–981,
doi:10.1175/2009MWR3049.1.
——, and ——, 2011: Assessing the performance of an ensemble
forecast system in predicting the magnitude and the spectrum
of analysis and forecast uncertainties. Mon. Wea. Rev., 139,
1207–1223, doi:10.1175/2010MWR3439.1.
Terasaki, K., M. Sawada, and T. Miyoshi, 2015: Local ensemble
transform Kalman filter experiments with the Nonhydrostatic
Icosahedral Atmospheric Model NICAM. SOLA, 11, 23–26,doi:10.2151/sola.2015-006.
Wang, X., D. Parrish, D. Kleist, and J. Whitaker, 2013: GSI
3DVar-based ensemble–variational hybrid data assimila-
tion for NCEP global forecast system: Single-resolution ex-
periments. Mon. Wea. Rev., 141, 4098–4117, doi:10.1175/
MWR-D-12-00141.1.
Yussouf, N., andD. J. Stensrud, 2010: Impact of phased-array radar
observations over a short assimilation period: Observing sys-
tem simulation experiments using an ensemble Kalman filter.
Mon. Wea. Rev., 138, 517–538, doi:10.1175/2009MWR2925.1.
Zhang, F., Y. Weng, J. A. Sippel, Z. Meng, and C. H. Bishop, 2009:
Cloud-resolving hurricane initialization and prediction through
assimilation of Doppler radar observations with an ensemble
Kalman filter. Mon. Wea. Rev., 137, 2105–2125, doi:10.1175/
2009MWR2645.1.
DECEMBER 2016 KONDO AND M IYO SH I 4865
Unauthenticated | Downloaded 02/15/22 05:21 AM UTC





























