Embed Size (px)
Citation preview

IMPROVED VISUALIZATION ALGORITHMS FOR VERTICAL TWO-PHASE ANNULARFLOW
By
WESLEY WARREN KOKOMOOR
A THESIS PRESENTED TO THE GRADUATE SCHOOLOF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE DEGREE OFMASTER OF SCIENCE
UNIVERSITY OF FLORIDA
2011

I dedicate this to the ashes of the Department of Nuclear and Radiological Engineering.
2

ACKNOWLEDGMENTS
The author gratefully acknowledges the teaching guidance of Dr. DuWayne Schubring,
who has demonstrated a committment to the success of his students and to the overall quality of
thermal hydraulic research.
The author recognizes and appreciates the matching financial support for the NRC Faculty
Development Grant Program from the University of Florida College of Engineering and Depart-
ment of Nuclear and Radiological Engineering. Additional funding for research equipment has
also been graciously provided by the University of Florida Division of Sponsored Research.
3

TABLE OF CONTENTS
page
ACKNOWLEDGMENTS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
LIST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
LIST OF SYMBOLS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
CHAPTER
1 INTRODUCTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.1 Annular Flow Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.2 Quantitative Visualization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.3 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2 LITERATURE REVIEW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.1 Regime Identification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202.2 Flow Visualization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242.3 Annular Flow Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3.1 Schubring and Shedd Prediction of Film Thickness . . . . . . . . . . . . 302.3.2 Schubring and Shedd Prediction of Wave Behavior, Entrained Fraction,
and Pressure Gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.4 Application of Literature . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3 PLIF EDGE IDENTIFICATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.1 PLIF Optics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.2 PLIF Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2.1 PLIF Image Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . 393.2.2 Code Modifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.2.3 PLIF Outlier-Selection GUI . . . . . . . . . . . . . . . . . . . . . . . . . 433.2.4 PLIF Data Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.3 PLIF Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.3.1 PLIF Image Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . 473.3.2 PLIF Single-Zone Comparison . . . . . . . . . . . . . . . . . . . . . . . 473.3.3 PLIF Base and Wave Comparison . . . . . . . . . . . . . . . . . . . . . . 55
3.3.3.1 Critical Standard Deviation Multiplier Method . . . . . . . . . 553.3.3.2 Intermittency Input Method . . . . . . . . . . . . . . . . . . . 60
4 PLIF INTERFACE TRACKING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.1 PLIF Image Pair Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4

4.1.1 PLIF Image Pair Edge Processing . . . . . . . . . . . . . . . . . . . . . . 684.1.2 PLIF Image Pair Divisions . . . . . . . . . . . . . . . . . . . . . . . . . 684.1.3 PLIF Image Pair Cross-Correlation . . . . . . . . . . . . . . . . . . . . . 684.1.4 PLIF Image Pair Data Processing . . . . . . . . . . . . . . . . . . . . . . 69
4.1.4.1 PLIF Image Pair Outlier Removal . . . . . . . . . . . . . . . . 724.1.4.2 Van Driest Model Data Fitting . . . . . . . . . . . . . . . . . . 72
4.2 PLIF Image Pair Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5 VERTICAL WAVE LENGTH MEASUREMENT . . . . . . . . . . . . . . . . . . . . 77
5.1 Vertical Wave Video Acquisition . . . . . . . . . . . . . . . . . . . . . . . . . . 775.2 Vertical Wave Length Processing . . . . . . . . . . . . . . . . . . . . . . . . . . 795.3 Vertical Wave Length Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.3.1 Individual Wave Length Results . . . . . . . . . . . . . . . . . . . . . . 815.3.2 Average Wave Length Results . . . . . . . . . . . . . . . . . . . . . . . . 825.3.3 Wave Correlations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6 GLOBAL MODEL APPLICATION . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
6.1 Re-Correlated Film Behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . 856.1.1 PLIF Observations (FEP Test Section) . . . . . . . . . . . . . . . . . . . 856.1.2 Vertical Wave Observations . . . . . . . . . . . . . . . . . . . . . . . . . 86
6.2 Model Adjustments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 876.3 Comparison to Vertical Data (FEP Tube) . . . . . . . . . . . . . . . . . . . . . . 886.4 Comparison to Vertical Data (Quartz Tube) . . . . . . . . . . . . . . . . . . . . 89
7 CONCLUSIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
7.1 PLIF Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 947.2 PLIF Image Pair Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . 957.3 Vertical Wave Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 967.4 Global Model Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 977.5 Overall Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 987.6 Recommended Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
APPENDIX
A PLIF DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
B PLIF HISTOGRAMS: BASE AND WAVE . . . . . . . . . . . . . . . . . . . . . . . . 104
C PLIF HISTOGRAMS: STANDARD DEVIATION MULTIPLIER METHOD . . . . . 107
D PLIF HISTOGRAMS: INTERMITTENCY METHOD . . . . . . . . . . . . . . . . . 115
E PLIF IMAGE PAIR DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
F MEAN INTERFACIAL VELOCITY PLOTS . . . . . . . . . . . . . . . . . . . . . . 127
5
G VERTICAL WAVE LENGTH DATA . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
H VERTICAL WAVE LENGTH EXAMPLE IMAGES . . . . . . . . . . . . . . . . . . 132
REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
BIOGRAPHICAL SKETCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
6

LIST OF TABLES
Table page
3-1 Initial crop widths for PLIF image processing. . . . . . . . . . . . . . . . . . . . . . . 39
3-2 Error comparison for film thickness relative roughness correlation. . . . . . . . . . . . 55
3-3 Error calculations for base-to-wave ratio correlation. . . . . . . . . . . . . . . . . . . 62
5-1 Frame rates and video lengths for vertical wave videos . . . . . . . . . . . . . . . . . 79
5-2 Performance of vertical-specific wave correlations . . . . . . . . . . . . . . . . . . . . 84
6-1 Performance of present global model for vertical FEP film thickness data. . . . . . . . 88
6-2 Performance of present global model for vertical quartz tube data. . . . . . . . . . . . 89
A-1 Vertical FEP tube data. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
A-2 PLIF data using kc method. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
A-3 PLIF data using INTw method. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
E-1 Flow conditions for PLIF image pair sets. . . . . . . . . . . . . . . . . . . . . . . . . 126
G-1 Vertical quartz tube wave data (1). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
G-2 Vertical quartz tube wave data (2). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
7

LIST OF FIGURES
Figure page
1-1 PLIF images of base film. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1-2 Back-lit images of disturbance waves. . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2-1 Vertical flow regimes, as shown by Hewitt and Hall Taylor. . . . . . . . . . . . . . . . 21
2-2 Schematic illustration of flooding and flow reversal. . . . . . . . . . . . . . . . . . . . 23
3-1 Test section for PLIF measurements. Flow is out of the plane of the page. . . . . . . . 38
3-2 Example rejected PLIF images. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3-3 Example processed PLIF images for flow condition 121F. . . . . . . . . . . . . . . . . 48
3-4 Example processed PLIF images for flow condition 162F. . . . . . . . . . . . . . . . . 49
3-5 Histograms of film thickness (base and wave) comparison to original results. . . . . . . 50
3-6 Histograms of film thickness (base and wave) comparison to original results. . . . . . . 51
3-7 Histograms of film thickness (base and wave) comparison to original results. . . . . . . 52
3-8 Histograms of film thickness (base and wave) comparison to original results. . . . . . . 53
3-9 Total film thickness trend comparison. . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3-10 Histograms of base film using kc method for selected flow conditions. . . . . . . . . . 56
3-11 Histograms of base film using kc method for selected flow conditions. . . . . . . . . . 57
3-12 Base film thickness trends using kc method for selected flow conditions. . . . . . . . . 58
3-13 Histograms of wave height using kc method for selected flow conditions. . . . . . . . . 59
3-14 Histograms of wave height using kc method for selected flow conditions. . . . . . . . . 60
3-15 Wave height trends using kc method. . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3-16 Ratio of wave height to base film using kc method. . . . . . . . . . . . . . . . . . . . 62
3-17 Base film thickness trends, kc method versus INTw method. . . . . . . . . . . . . . . 63
3-18 Wave height trends, kc method versus INTw method. . . . . . . . . . . . . . . . . . . 64
3-19 Ratio of wave height to base film, kc method versus INTw method. . . . . . . . . . . . 65
4-1 Diagram of processing path for PLIF interface tracking. . . . . . . . . . . . . . . . . . 67
4-2 PLIF cross-correlation example graphs. . . . . . . . . . . . . . . . . . . . . . . . . . 70
8

4-3 PLIF cross-correlation example images. . . . . . . . . . . . . . . . . . . . . . . . . . 71
4-4 y+ vs. u+i plots for selected flow conditions . . . . . . . . . . . . . . . . . . . . . . . 74
4-5 y+ vs. u+i plots for selected flow conditions . . . . . . . . . . . . . . . . . . . . . . . 75
4-6 Average y+ vs. u+i , by Usg. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4-7 PLIF interfacial velocity data (with van Driest model). . . . . . . . . . . . . . . . . . 76
5-1 Schematic of vertical flow loop with quartz test section. . . . . . . . . . . . . . . . . . 78
5-2 Visualization section for vertical waves, including measurement for physical scale. . . 78
5-3 Schematic of vertical wave length measurement techniques. . . . . . . . . . . . . . . . 80
5-4 Example wavelength comparison images for varying gas velocities. . . . . . . . . . . . 82
5-5 Wave length and intermittency trends with comparison of measurement techniques . . 83
5-6 Wave length and intermittency correlation performance. . . . . . . . . . . . . . . . . . 84
6-1 Model results pertaining to film thickness for vertical FEP tube. . . . . . . . . . . . . . 90
6-2 Components of τi from model for vertical FEP tube. . . . . . . . . . . . . . . . . . . . 91
6-3 Performance of model in vertical quartz tube. . . . . . . . . . . . . . . . . . . . . . . 92
6-4 Modeled entrained fraction, Emod, in vertical quartz tube. (Left) By Usl. (Right) By Usg. 93
B-1 Histograms of film thickness (base and wave) for selected flow conditions. . . . . . . . 104
B-2 Histograms of film thickness (base and wave) for selected flow conditions. . . . . . . . 105
B-3 Histograms of film thickness (base and wave) for selected flow conditions. . . . . . . . 106
C-1 Histograms of base film thickness using kc method for selected flow conditions. . . . . 107
C-2 Histograms of base film thickness using kc method for selected flow conditions. . . . . 108
C-3 Histograms of base film thickness using kc method for selected flow conditions. . . . . 109
C-4 Histograms of base film thickness using kc method for selected flow conditions. . . . . 110
C-5 Histograms of wave height using kc method for selected flow conditions. . . . . . . . . 111
C-6 Histograms of wave height using kc method for selected flow conditions. . . . . . . . . 112
C-7 Histograms of wave height using kc method for selected flow conditions. . . . . . . . . 113
C-8 Histograms of wave height using kc method for selected flow conditions. . . . . . . . . 114
D-1 Histograms of base film thickness using INTw method for selected flow conditions. . . 116
9

D-2 Histograms of base film thickness using INTw method for selected flow conditions. . . 117
D-3 Histograms of base film thickness using INTw method for selected flow conditions. . . 118
D-4 Histograms of base film thickness using INTw method for selected flow conditions. . . 119
D-5 Histograms of base film thickness using INTw method for selected flow conditions. . . 120
D-6 Histograms of wave height using INTw method for selected flow conditions. . . . . . 121
D-7 Histograms of wave height using INTw method for selected flow conditions. . . . . . 122
D-8 Histograms of wave height using INTw method for selected flow conditions. . . . . . 123
D-9 Histograms of wave height using INTw method for selected flow conditions. . . . . . 124
D-10 Histograms of wave height using INTw method for selected flow conditions. . . . . . 125
F-1 PLIF interfacial velocity data plots for selected flow conditions. . . . . . . . . . . . . . 127
F-2 PLIF interfacial velocity data plots for selected flow conditions. . . . . . . . . . . . . . 128
F-3 PLIF interfacial velocity data plots for selected flow conditions. . . . . . . . . . . . . . 129
H-1 Vertical wave length example images for flow condition 139Q. . . . . . . . . . . . . . 132
H-2 Vertical wave length example images for flow condition 140Q. . . . . . . . . . . . . . 133
H-3 Vertical wave length example images for flow condition 141Q. . . . . . . . . . . . . . 133
H-4 Vertical wave length example images for flow condition 143Q. . . . . . . . . . . . . . 134
H-5 Vertical wave length example images for flow condition 145Q. . . . . . . . . . . . . . 134
H-6 Vertical wave length example images for flow condition 147Q. . . . . . . . . . . . . . 135
H-7 Vertical wave length example images for flow condition 149Q. . . . . . . . . . . . . . 135
H-8 Vertical wave length example images for flow condition 151Q. . . . . . . . . . . . . . 136
H-9 Vertical wave length example images for flow condition 153Q. . . . . . . . . . . . . . 136
H-10 Vertical wave length example images for flow condition 155Q. . . . . . . . . . . . . . 137
H-11 Vertical wave length example images for flow condition 157Q. . . . . . . . . . . . . . 137
10
LIST OF SYMBOLS, NOMENCLATURE, OR ABBREVIATIONS
A area (m2)
Ar function of roughness from Nikuradse equation
avedarki average darkness (axial) in vertical wave video images
avedarkX average, time-independent darkness (axial) in vertical wave video images
base (as subscript) pertains to base film
cB parameter in Hurlburt et al. rough-tube friction factor
Cf (Fanning) friction factor
core (as subscript) pertains to the gas core
crit (as subscript) critical
D diameter (m)
Dh hydraulic diameter (m)
ddarki normalized average darkness (axial) in vertical wave video images
E entrained fraction
fwave wave frequency (s−1)
FEP flourinated ethylene propylene
film (as subscript) pertains to liquid film
fps frames per second (s−1)
fric (as subscript) part due to friction
g acceleration due to gravity
g (as subscript) pertains to gas phase
G mass flux (kg m−1 s−2)
11

HEA (as subscript) pertains to model of Hurlburt et al.
i (as subscript) evaluated at gas-liquid interface
INTw wave intermittency
kc (PLIF) standard deviation multiplier
KEs superficial kinetic energy (dynamic pressure) (J m−3)
l (as subscript) pertains to liquid phase
Lwave length of a disturbance wave (m)
LF linear fraction (from film thickness model)
m mass flow rate (kg s−1)
m+ non-dimensional mass flow rate
mod (as subscript) pertains to a modeled result
nFC number of flow conditions considered
nframes number of frames in a vertical wave video
npairs number of (PLIF) image pairs
nom (as subscript) nominal value
OH (as subscript) pertains to the Owen and Hewitt model
P pressure (Pa)
PLIF planar laser-induced flourescence
Q volumetric flow rate (m3s−1)
Quartz pertains to quartz test section
RD droplet deposition flux (kg m−2 s−1)
Re Reynolds number
12

Re? roughness Reynolds number
rough (as subscript) part due to roughness (as opposed to drag)
Score wave score
Sr Strouhal number
SS (as subscript) pertains to a correlation in the works of Schubring andShedd
t time (general) (s)
tvideo length of high-speed video (s)
trans (as subscript) related to the transition from base film zone to wave zone
u axial velocity (m s−1)
U velocity (general) (m s−1)
U+ non-dimensional velocity (general)
u+ non-dimensional axial velocity
u? liquid friction velocity (m s−1)
UD velocity of depositing droplets (m s−1)
UE velocity of entraining droplets (m s−1)
Us superficial velocity (volume flux) (m s−1)
UV P universal velocity profile
vfric,g gas friction velocity (m s−1)
vwave wave velocity (m s−1)
wave (as subscript) pertains to waves
α void fraction
δ film thickness (m)
13

δ+ wall coordinate film thickness (non-dimensional)
∆t time difference (PLIF image pairs) (s)
ε roughness height (m)
ε non-dimensional roughness height
εeff effective roughness (m)
κ von Karman constant
µ dynamic viscosity (kg m−1)
ν kinematic viscosity (m2 s−1)
φRR parameter in film thickness model
ρ density (kg m−3)
σ surface tension (N m−1)
τ shear (Pa)
14

Abstract of Thesis Presented to the Graduate Schoolof the University of Florida in Partial Fulfillment of the
Requirements for the Degree of Master of Science
IMPROVED VISUALIZATION ALGORITHMS FOR VERTICAL TWO-PHASE ANNULARFLOW
By
Wesley Warren Kokomoor
May 2011
Chair: DuWayne SchubringMajor: Nuclear Engineering Sciences
Annular flow is a configuration of gas-liquid two-phase flow characterized by a thin film
of liquid surrounding a core of faster-moving gas. The liquid film is often a site of complex
geometry where liquid mass transport occurs through base film and disturbance waves. Annular
flow occurs in a wide range of industrial heat-transfer equipment, including the top of a BWR
core, in the steam generator of a PWR, and in postulated accident scenarios including critical heat
flux (CHF) by dryout.
The present work focuses on the characterization of individual film behaviors in annular
flow. Quantitative visualization techniques are discussed that provide for large-scale data
collection of multiple, interrelated flow behaviors. The non-trivial data reduction codes for
these techniques have been further developed in the present work to improve measurement
accuracy. Film thickness distribution (base film and wave), disturbance wave length, and wave
intermittency estimates have been updated using modified techniques. A system is also suggested
for measuring the velocity of the gas-liquid interface. Lastly, the present observations have been
applied to a recent two-region (base film and disturbance wave) annular flow model.
15

CHAPTER 1INTRODUCTION
Gas-liquid two-phase flow is common to many industrial applications, especially in
boiling or condensing heat transfer equipment. Nuclear power plants contain two-phase flow in
several systems of light water reactors, including boiling in the core of a BWR and in the steam
generator of a PWR. The core of a PWR may also be the site of saturated boiling in off-normal
conditions or accident scenarios.
The continuing study of two-phase flow is necessary due to the complexity of interactions
at the interfaces between phases. Most descriptions of these interactions begin by recognizing
and categorizing the general arrangement of the two-phases, referred to as a “flow regime.” A
more comprehensive look into flow regime categories, traits, and identification is included in
Section 2.1.
1.1 Annular Flow Overview
The current work focuses on the annular flow regime, characterized by a core of fast-moving
gas surrounded by a liquid film along the channel wall. Annular flow occurs through a wide
range of gas and liquid flow rates. In nuclear systems, annular flow may be observed near the top
of the core in a BWR and in the steam generator of a PWR. This regime is also the final stage in
channel boiling before gas-droplet flow occurs in critical heat flux (CHF) by dryout (postulated
BWR accident scenario).
The liquid film is often a site of complex geometry. The liquid moves slowly relative to the
gas core and may transport a small fraction of the gas as bubbles, which can affect boiling heat
transfer. The remainder of the liquid film can be divided into base film and disturbance waves.
The base film occupies most of the total film area, creating a relatively smooth interface
with the gas core. Some example images of base film are shown in Figure 1-1, taken using a
planar laser-induced flourescence (PLIF) technique and processed using the method discussed in
Chapter 3. Each image has been rotated 90◦ counter-clockwise, so the vertical upflow is shown as
right to left. The gas velocity for the top four images is considerably less than for the top four (46
16

m s−1 vs. 78 m s−1). The images indicate that an increased gas flow rate has a slimming effect on
base film thickness.
Figure 1-1. PLIF images of base film. Usl = 6.3 cm s−1. Usg = (top four) 46 m s−1, (bottom four)78 m s−1.
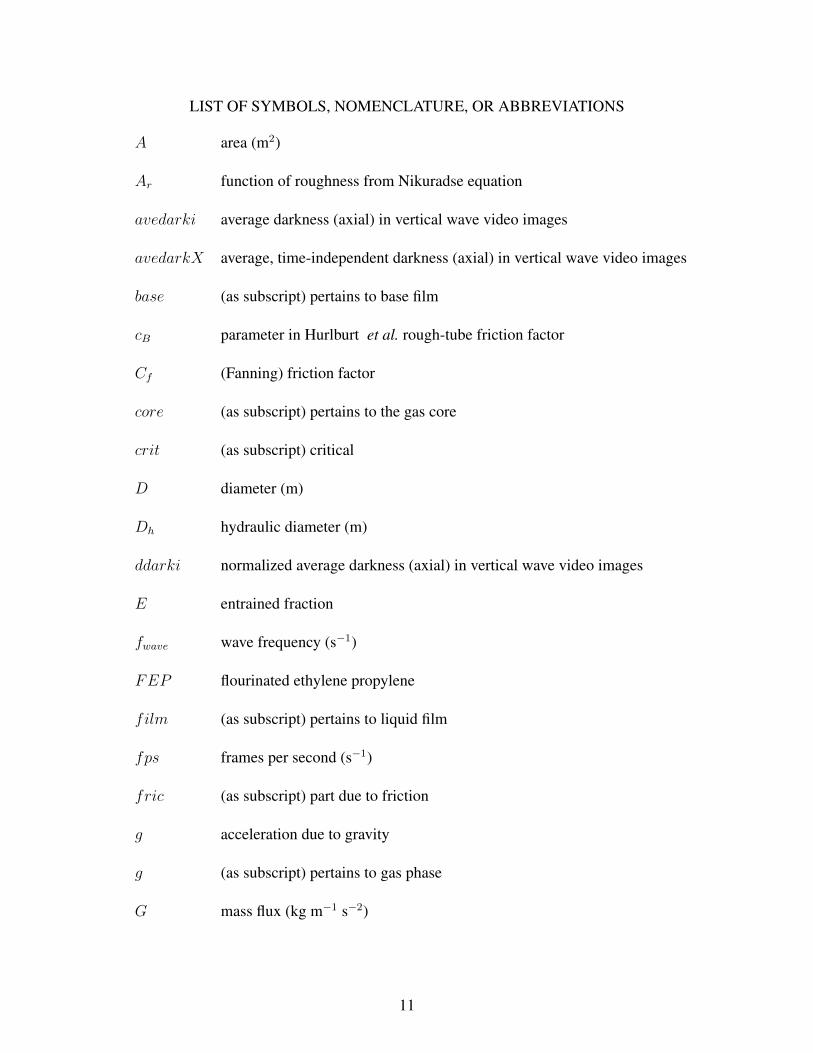
Disturbance waves travel along top of the base film, exchanging liquid mass with the base
film and traveling at a much higher velocity. Some example backlit wave images, processed
using the method discussed in Chapter 5, are shown in Figure 1-2. The waves in these images
are visible as dark patches because less light is transferred through the thicker film sections,
indicative of wave behavior.
In addition to base film and waves, some liquid is transported through the tube as droplets
entrained in the gas core. The study of liquid entrainment requires difficult and often intrusive
measurements that are not among the present visualization techniques. However, the qualitative
assessment of entrainment is an important aspect of annular flow mechanics; entrained liquid
behavior is closely tied to disturbance wave behavior.
1.2 Quantitative Visualization
Quantitative visualization refers to a family of data acquisition techniques based on
the manipulation and detection of radiation in a flow field. The center of the visualization
process is an experimental apparatus, reconstructing a flow scenario with necessary control and
17
Figure 1-2. Back-lit images of disturbance waves. Usl = 15.3 cm s−1, Usg = 52 m s−1
measurement ability. Depending on the technique, a fluid dye or tracer may also be an integral
part of the apparatus.
The fluid, dye, or tracer is bombarded by a radiation source (e.g. laser) and the subsequent
reaction is recorded. The recorded data can be in a wide range of formats – including intensity
measurements, images, holograms, etc. – and usually requires a non-trivial data reduction code
specific to the experiment. The implementation of most quantitative visualization techniques
is mechanically and computationally expensive. However, with careful setup, it permits one to
visualize complex flow fields nearly instantaneously with high spatial and temporal resolution.
The current work focuses on two systems for quantitative visualization of annular flow:
planar laser-induced fluorescence (PLIF, Chapters 3 and 4) for film thickness and high-speed
video (Chapter 5) for wave data. Both systems employ user-developed data regression codes in
MATLAB.
1.3 Objectives
The primary goal of the present research is to improve the understanding of vertical annular
flow behavior through the improvement of specific behavior data banks. This goal has been split
into two main objectives:
18
1. Develop (or improve existing) MATLAB code for the extraction of data from annular flowimages, including
(a) Film thickness and roughness (from PLIF images),
(b) Interfacial velocity profile (from PLIF images),
(c) Disturbance wave velocity and intermittency (from back-lit tube images)
2. Enhance behavior interrelationships by
(a) Re-assessment and correlation of flow parameter observations, and
(b) Re-optimization of the Schubring and Shedd [1] model for annular flow behavior.
All of the correlations, re-correlations, and model adjustments are scrutinized based on three
measurements of error: mean error, mean absolute error (MAE), and root-mean squared error
(RMS):
MeanError =1
n
n∑i=1
Fi − YiYi
× 100% (1–1)
MAE =1
n
n∑i=1
∣∣∣∣Fi − YiYi
∣∣∣∣× 100% (1–2)
RMS =
√√√√ 1
n
n∑i=1
(Fi − YiYi
× 100%
)2
(1–3)
where Fi is the predicted value, Yi is the true (experimental) value, and n is the number of data
points.
19

CHAPTER 2LITERATURE REVIEW
This chapter summarizes literature relevent to the present research. Fundamental two-phase
flow behavior and visualization techniques are outlined, followed by literature on the following
annular flow behaviors of interest:
• Base film thickness,
• Disturbance wave velocity, frequency, and length,
• Liquid entrainment.
The behavior interrelationships are discussed using the global
2.1 Regime Identification
The characterization of two-phase flow through a channel has been the subject of research
for many decades due to the complex interactions at the interfaces between phases. The contrast
between single and multi-phase system dynamics is stark, but certain elements are still relevent,
such as turbulence. Single-phase turbulence has been well established in fluid dynamics text (e.g.
Kays et al. [2] and Holman [3]) by use of the dimensionless Reynolds number, ReD:
ReD =ulDh
νl(2–1)
where ul is the average liquid velocity, νl is the liquid kinematic viscosity and Dh is the hydraulic
diameter used to characterize channel geometries. For a given geometry, an upper limit for
laminar behavior can be formed in terms of ReD, above which transitional or fully turbulent
behavior prevail.
In contrast, texts such as Whalley [4] have demonstrated the severe changes in the physical
nature of two-phase gas-liquid flows over a range of flow parameters. The interaction between
phases in a multi-phase channel often becomes very complex, leading to distinct configurations,
or flow regimes, as a function of fluid pressure, gas and liquid flow rates, fluid properties, and
channel geometry. Hewitt and Hall Taylor [5] suggested four basic flow regimes for vertical flow,
20

shown in Figure 2-1: the bubbly regime, where vapor bubbles are evenly dispersed throughout
a continuous liquid phase; slug, where large bubbles (slugs) take up much of the volume; churn,
where the faster moving fluids create complex oscillations; and annular, where a continuous core
of gas is surrounded by a thin film of slower-moving liquid.
Figure 2-1. Vertical flow regimes, as shown by Hewitt and Hall Taylor [5]. From left-to-right:bubbly flow, slug flow, churn flow, and annular flow.
In addition, a wispy-annular regime has been observed (such as by Hewitt and Roberts
[6]) for high gas and high liquid flow, causing a large fraction of liquid to travel through the gas
core as “wisp” structures. One of the characteristics of the wispy-annular regime, as discussed
by Hawkes et al. [7], is the significant fluctuation in pressure gradient. They also developed a
mechanism for predicting the transition into this regime based on conservation equations and the
development of sustained liquid waves in the gas core.
Modeling attempts for two-phase flow are often specific to one of these regimes due to the
differences in phase interactions. The consequences of non regime-specific, or “patternless,”
modeling have been discusses in detail by Thome [8, 9] with a heat transfer perspective. Several
negative effects were discussed by Thome, including:
1. Failure to predict the onset of dryout or the sharp decline in two-phase void fraction duringcertain dryout scenarios.
2. The neglect of proper annular film heat transfer.
21

3. The neglect of proper turbulent and thermal boundary layer theory for heat transfer.
The determination of vertical two-phase regimes based on basic flow parameters has been
addressed from many angles. Several attempts have been made in the literature to plot regime
transitions on specified coordinates. A short summary of this concept, referred to as regime
mapping, has been provided by Whalley [4]. One of the earliest attempts at regime mapping
(Baker [10]) relied on the observation of transitions by the author. The plotting corrdinates for
the Baker map are the mass fluxes of the gas and liquid with corrections for fluid properties. The
usefulness of this map is limited to small tube diameters ( < 0.05 m) and for air/water flows (for
which the map was developed).
The Hewitt and Roberts [6] map was also produced by observation for air/water systems,
this time for vertical flow and with mapping coordinates of momentum flux, calculated from
the mass flux (G) and density (ρ). The inclusion of density in the mapping coordinates creates
some sensitivity to pressure in the flow system. However, the reliance of observation in the
development of the map is still inherently subjective. The work of Taitel et al. [11] was one
attempt to create regime transition criteria from mechanical principles. Many of these theoretical
processes, however, have been under scrutiny due to questionable physical principles (Whalley
[4]). A critique of the Taitel et al. principles has also been provided by Hewitt [12].
Mishima and Ishii [13] have also developed transition criteria based on principles of fluid
mechanics. Of particular interest to the current work is the churn-to-annular transition, which has
been developed in the one-dimensional drift flux model by Hibiki and Ishii [14] and described by
two mechanisms.
The first mechanism relates the onset of annular flow to the absence of flow reversal in the
liquid film section along large bubbles. This is closely related to the concepts of flow reversal and
flooding – the transition between countercurrent and cocurrent flow, shown in Figure 2-2. Fowler
and Lisseter [15] have provided a review of mechanical principles for the onset of cocurrent flow
(flooding) using a two-fluid model. Flooding is analagous to the churn-to-annular transition,
considering countercurrent flow as large bubbles in a slug regime.
22

Figure 2-2. Schematic illustration of flooding and flow reversal, as shown by Fowler and Lisseter[15].
The second annular transition mechanism described by Hibiki and Ishii is the destruction
of liquid slugs or waves by entrainment or deformation. This would occur at a superficial gas
velocity, Usg, sufficient to entrain liquid in the core. Equation 2–2 has been derived by a force
balance between the shearing force of the vapor drag and the surface tension of the liquid. The
application of this model has been limited to tube diameters larger than the criterion shown in
Equation 2–3 (for round tube geometry).
Usg ≥(σg∆ρ
ρ2g
)1/4
N−0.2µf (2–2)
23

D >
√(σ
∆ρg
)N−0.4µf
[(1 − 0.11Co)/Co]2 (2–3)
Nµf = µf
[ρfσ
√(σ
∆ρg
)]−1/2
(2–4)
Co = 1.2 − 0.2
√(ρgρf
)(2–5)
2.2 Flow Visualization
Flow visualization refers to the identification of visible patterns in fluid motion and the sub-
sequent qualitative or quantitative analysis. The present discussion focuses on those techniques
that enhance the understanding of annular two-phase flow.
Perhaps the most basic application of flow visualization is by direct image manipulation and
processing. Ohta et al. [16] has demonstrated early image thresholding methods for determining
velocity flow fields for bubbles. The use of high-speed video and image processing for two-phase
flow has been demonstrated by Rezkallah et al. [17, 18] to determine local gas phase velocities
and instantaneous void fractions. These studies are sensitive to two-phase flow regimes and
provide regime-specific data and early estimations of error.
Recently, Schubring et al. [19] has provided a quantitative, statistical approach to vertical
annular flow wave measurements by image manipulation and processing. The images used in
the study were obtained by high-speed video of a backlit tube. The visualization of disturbance
waves has also been specifically studied by Belt et al. [20] through the use of conductance-based
film thickness sensors. The sensors were applied in an array that facilitated the time-resolved,
three-dimensional visualization of disturbance waves, which is also relevent to the present work
on wave characteristics. The validity of conductance probes as film thickness measurement
devices has been scrutinized by Rodrıguez [21] for a failure to recognize bubbles in the liquid
film. The devices are also often placed into the flow and are thus invasive to the experiment.
Flow visualization methods are constantly adapting to technological advancements, notably
laser capabilities and computational power. A recent and comprehensive review of achievements
24

in the area is provided by Smits and Lim [22]. The ability to obtain and analyze information
on particles in fluid motion has been an extremely powerful advancement over the past three
decades. A review of measurements by fluid particle techniques on the micro and macro scale
has been provided by Sinton [23]. Popular particle-based visualization techniques include laser-
doppler velocimetry (LDV), particle image velocimetry (PIV), and particle tracking velocimetry
(PTV).
Two-beam LDV is one of the earliest laser systems for flow measurement, popular in
practice since the mid 1970s. Macroscale LDV has been successfully applied to two- and three-
dimensional flow patterns, including three-dimensional turbulent boundary layers by Compton
and Eaton [24]. In a general LDV system, a small volume of fluid, seeded with reflective
particles, is exposed to the interference pattern created by the intersection of two lasers. Flow
velocity can then be determined by calculating the Doppler frequency in a given control volume.
The goal for most fluid visualization techniques is to achieve spatial and temporal resolution
fine enough to observe microscale turbulent motion. However, microscale LDV has been
limited technologically by laser diameter, which limits the size of the interference section, and
statistically by reducing the number of particles in the interference section. The work of Compton
and Eaton displays two-dimensional interference sections as small as 35µm× 66µm. Further
advancements have been made by Tieu et al. [25] with LDV velocity measurements as close as
18µm to a channel wall.
Particle image velocimetry (PIV) involves a fundamentally different approach to particle
motion in fluids, adding the ability to track velocity and direction for several locations of
interest at once. The histories of multiple seed particles in a flow are recorded by time-elapsed
photography and are analyzed in a separate process to determine velocity vectors.
General PIV setups allow an area to be instantaneously observed through the use of a
planar illumination source, usually a pulsed laser sheet, and one or more cameras. The work of
Adrian [26] demonstrates the variety of instrumentation techniques under the general theory of
PIV. Several physical limitations exist for a PIV system that must be addressed simultaneously,
25

including size of the control volume, particle density, particle response, and methods for time-
elapsed photography. The optimization of PIV systems for two-pulse imaging and multi-pulse
imaging has also been developed by Keane and Adrian [27, 28].
Another limitation of PIV is the computational power required for statistical image correla-
tion. The extraction of quantitative data from particle images is often the most important step in
PIV measurements, as described by Hinsch [29]. The correlation of multiple particle images is
achieved by autocorrelation or by cross-correlation. Autocorrelation is performed by shifting an
image and correlating with itself, which is used in PIV systems that acquire a single, multiple-
exposed image. Limitations to autocorrelation, including the apparent lack of positive/negative
direction, have been mitigated by Marzouk and Hart [30].
In contrast, cross-correlation requires two separate images and knowledge of the time
between them. The advantage of cross-correlation is the knowledge of direction due to the
independently exposed images. The work Keane and Adrian [31] has shown considerable
advancement in cross-correlation techniques specifically for the use of PIV measurements. The
disadvantages to this method include more expensive instrumentation (camera speed), increased
storage capacity (double the images), and increased computational power (image manipulation).
The usual application of PIV can develop velocity vector fields in two dimensions (2-D)
for a fixed time. Several innovative techniques have been developed to apply PIV to three
dimensions (3-D) to fully understand volumetric fluid motion. A recent review of leading 3-
D PIV techniques has been discussed by Hinsch [32]. The utmost in multi-dimensional flow
visualization involves the resolution of three velocity demensions over three spacial dimensions
with time. The only visualization technique advanced enough to store such a high quantity of
data, to date, is holographic PIV.
The application of PIV to achieve microscale flows is termed as micro-PIV, which is
especially useful for low velocities such as near-wall flows or low Reynolds number flows.
Santiago et al. [33] demonstrate micro-PIV measurements with spatial resolutions that approach
one micron.
26

Also of particular interest is the application of PIV to multiphase gas-liquid flows. The
ability to resolve two phases with micro-PIV has been demonstrated by Hassan [34] for bubbly
air-water flow in a vertical channel. Wavy and wavy-annular flow regimes have also been
successfully characterized by Schubring et al. [35] using micro-PIV.
Particle tracking velocimetry (PTV) attempts to increase resolution by tracking individual
particles rather than locations. The clear advantage over PIV, which requires approximately 20
particles per interrogation area to obtain an accurate velocity vector (Sinton [23]), is that PTV
provides up to 20 individual velocity vectors. In practice, however, individual particle tracking
requires more than two images per correlation set and a fraction of particles are lost in tracking.
To provide enough flow information to accurately track individual particles, PTV theory
has been coupled with PIV correlations, often phrased as “super-resolution” PIV analysis. This
was first accomplished by Keane et al. in 1995 [36], who improved the spacial resolution of
normal PIV measurements by 250%. More recent efforts by Takehara et al. [37] have shown
improvements of over 500% with similar methods.
The advancements in laser power and pulse frequency capabilities have opened up new
realms of flow visualization based on laser-induced fluorescence (LIF) [22]. Most LIF appli-
cations for the two-dimensional visualization of fluid flow are collectively referred to as planer
laser-induced fluorescence (PLIF), which has been studied as early as 1988 by Hanson [38].
PLIF uses a laser at an appropriate frequency to excite the seed molecules in a fluid, which sub-
sequently flouresce. The result is a nearly instantaneous cross-sectional image of a fluid, making
PLIF a very attractive method for high-velocity turbulent flow imaging. Kychakoff et al. [39]
demonstrated the early ability of PLIF to visualize highly turbulent flame gases. The work of
Hanson [40] further demonstrated the use of PLIF for pressurized combustion processes.
The transformation of PLIF images into quantitative data often requires unique, non-trivial
image processing and can be very computationally expensive. Early efforts to understand the
capabilities of PLIF by van Cruyningen et al. [41] for flow through a nozzle emphasized the
resolution and error calculations of measurements. The use of PLIF to study annular flow film
27

thickness is a more recent development by Rodrıguez and Shedd [42], refined by Schubring et
al. [43, 44].
2.3 Annular Flow Modeling
The data analysis in the present work is focused on the characteristics of individual thin-film
mechanisms – liquid film and disturbance wave statistics – and the effects of those mechanisms
on annular flow behavior. In a two-zone model (waves and base film), disturbance waves are
modeled as separate structures than base film or entrained droplets. The two-zone method relies
heavily on accurate characterizations of wave behaviors.
Reviews of wave behavior are provided by Azzopardi in 1989 [45] and again in 1997 as a
part of a larger review of entrainment [46]. For vertical upflow, Nedderman and Shearer [47] and
Hall Taylor et al. [48] observed that wave velocities and frequencies increase with increasing
gas and liquid flow rate. Martin [49] has observed an inverse effect of tube diameter on wave
frequency. An inverse relationship between liquid kinematic viscosity and wave frequency has
also been observed by Mori et al. [50].
Some research, such as that by Mori et al. [51], has suggested the presence of two distinct
wave structures in vertical flow, termed disturbance waves and huge waves. The latter have
greater average velocity and liquid mass. Huge waves are observed closer to the annular-churn
boundary, outside of the range of the present work.
For the estimation of wave velocity, vwave, a mechanistic model and an empirical correlation
have been developed by Pearce [52] that include a dependence on liquid interface velocity, Ul,i.
However, this measurement is more challenging than that of vwave itself. Kumar et al. [53]
developed a vwave prediction based on superficial velocities and Reynolds numbers:
vwave,Kumar =CkumarUsg + Usl
1 + CKumar(2–6)
CKumar = 5.5
(ρgρl
)1/2(RelReg
)1/4
(2–7)
Rel =ml
Dπµl(2–8)
28
Reg =mg
Dπµg(2–9)
Wave frequency modeling, such as that by Sekoguchi et al. [54] and Azzopardi [45], often
relies on correlation with the Strouhal number, Sr:
Srwave =fwaveD
Usg(2–10)
The correlation is often a function of the liquid Reynolds number, Rel (equation 2–8). One recent
correlation for Sr has been developed by Sawant et al. [55]:
SrSawant = 0.086 (Rel)0.27
(ρlρg
)−0.64
(2–11)
There is also a great emphasis in the wave frequency literature on the effect of the velocity
distributions on wave coalescence (Azzopardi [45], Hall Taylor and Nedderman [56]). Waves
with a wider velocity distribution have a greater chance of colliding and coalescing with other
waves, affecting the overall frequency.
The length of disturbance waves, Lwave, refers to the size of the structures rather than the
spacing between waves and has not been widely correlated in the literature. Lwave is related to
wave intermittency, used in global models (e.g. Schubring and Shedd [1], Hurlburt et al. [57]).
A correlation for Lwave has been developed by Schubring et al. [19] based on tube diameter and
flow quality:
Lwave,SS = 0.53x−0.6D (2–12)
The underlying goal of annular flow research is the development of a global model to
predict all relevant flow characteristics based on few, easily obtainable inputs such as flow rates,
geometry, and thermodynamic states. Desirable outputs for a global model are pressure drop,
wave statistics, film thickness, film velocity, turbulence, and heat transfer. Information regarding
the initiation of phases in the channel – introduction of phases or transition into annular flow – is
required.
29

The global model of Schubring and Shedd [1] has been chosen for further discussion.
Similar to the Hurlburt et al. [57] model, the Schubring and Shedd model employs a two-zone
(base/wave) film roughness concept to link interfacial shear and film thickness. The Hurlburt et
al. model, however, requires film thickness and entrained fraction as inputs. The Schubring and
Shedd model addresses these issues by only requiring flow rates, fluid properties and geometry as
inputs. The outputs of the model include pressure gradient, film thickness (with zone separation),
and disturbance wave velocity. There is a greater emphasis on the behaviors in the liquid film
rather than on modeling entrainment or deposition.
2.3.1 Schubring and Shedd Prediction of Film Thickness
The prediction of film thicknesses originates with the correlation of a friction factor, the
sensitivity of which has been described by the authors as negligible. Two correlations for the
(Fanning) friction factor have been provided. The first is the Blasius relation (Equation 2–14)
increased by a factor φRR, where Recore,base is defined as the Reynolds number of the gas core
over the base film. Experimental data has been used to correlate φRR, shown in Equation 2–16.
Recore,base =ρgUcore,baseDcore,base
µg(2–13)
Cf,i,base = 0.079φRRRe−0.25core,base (2–14)
φRR = 1.9x0.1 (2–15)
The second is the friction factor of Hurlburt et al. [57], who set the empirical constant
cB,base to 0.8:
Cf,i,base = 0.582
[− ln εbase
(εbase − 1)2 − ln cB,base + 1.05 +1
2
εbase + 1
εbase − 1
]−2
(2–16)
The roughness is evaluated using:
εbase = 2 (1 − LFbase) δbase (2–17)
εbase =2εbase
D − δbase(2–18)
30

where LFbase is the fraction of film that follows a linear velocity profile. The remainder of liquid
film is observed as ripples at the gas-liquid interface and is modeled as well-mixed (constant
velocity). The ripple size was related to the standard deviation of base film height, provided
by the experimental data of Schubring et al. [43, 44] as 30% of the average base film. The
remaining 70% is assumed to flow with a linear (viscous) velocity profile (LFbase = 0.7).
The liquid velocity at the interface (Ul,i,base) and film flow rate (mfilm,base) are estimated
through a computation of shear:
τi,base = Cf,i,baseρgU
2core,base
2(2–19)
u?base =
√τi,baseρl
(2–20)
δ+base =
δbaseu?base
νl(2–21)
U+l,i,base = δ+
baseLFbase (2–22)
Ul,i,base = U+l,i,baseu
?base (2–23)
m+film,base =
[LF 2
base
2+ LFbase (1 − LFbase)
] (δ+base
)2 (2–24)
mfilm,base = m+film,baseDµlπ (2–25)
The velocity of the gas core over the base film (Ucore,base) and core velocity (Ug,base) are
computed from the following:
Dcore,base = D − 2δbase (2–26)
Acore,base =πD2
core,base
4(2–27)
Ucore,base = Ug,base − Ul,i,base (2–28)
Ug,base = UsgA
Acore,base(2–29)
Usg =mg
ρgA(2–30)
31

The model is closed with a relation of wave height to base film height. The average wave
height was observed to be approximately double the average base film height:
δwave = 2δbase (2–31)
2.3.2 Schubring and Shedd Prediction of Wave Behavior, Entrained Fraction, andPressure Gradient
The total modeled shear in the wave zone, τi,wave, is separated into two terms (Equation 2–
32). The first, τi,wave,rough, relates to the roughness of waves and is computed in an analogous
manner as the base film roughness. The second, τi,wave,trans, relates to the sudden transitions from
flow over base film to flow over waves. A rough-tube friction factor, Cf,i,wave, is estimated to
compute τi,wave,rough, where cB,wave is an empirical constant set to the value of 2.4 suggested by
Hurlburt et al. [57]:
τi,wave = τi,wave,rough + τi,wave,trans (2–32)
τi,wave,rough = Cf,i,waveρgU
2core,wave
2(2–33)
Cf,i,wave = 0.582
[− ln εbase
(εbase − 1)2 − ln cB,wave + 1.05 +1
2
εbase + 1
εbase − 1
]−2
(2–34)
The Schubring et al. model requires an approximation for wave roughness, which was
calculated as a constant 40% of the mean wave height. Wave roughness is therefore computed
with:
εwave = 0.4δwave (2–35)
εwave =2εwave
D − δwave(2–36)
The sudden transitions between base film and waves have been described by Schubring
and Shedd as similar to an obstacle in the tube. Wave properties are therefore important to the
calculation of gas-to-liquid momentum transfer (proportional to core kinetic energy density for
an obstruction). An empirical correlation, developed by Schubring [58], is used to estimate the
length of the disturbance waves, Lwave, presented in Equation 2–12
32

The characteristic gas velocity at the base-wave transition, Ug,trans, is found using:
Ug,trans = (Ul,i,base − Ul,i,wave) +
√τi,baseρg
√1
δ+g,trans
∫ δ+g,trans
0
[u+ (y+)]2 dy+ (2–37)
δ+g,trans =
δwave − δbaseνg
√τi,baseρg
(2–38)
The non-dimensional distance δ+g,trans represents the penetration of the wave into the boundary
layer formed over the base film. The characteristic velocity considers both the RMS velocity in
the gas obstructed by the film (second term, right hand side) and the change in interfacial velocity
between the wave and base film zones (first term, right hand side).
For turbulent gas and liquid velocity approximations, a universal velocity profile (UVP) is
assumed as presented by Whalley [4], where u+ and y+ are defined as:
u+(y) =u(y)
u?l(2–39)
y+ =yu?lνl
(2–40)
δ+ =δu?lνl
(2–41)
u+ =
y+ if y+ < 5
−3 + 5 ln(y+) if 5 < y+ < 30
5.5 + 2.5 ln(y+) if 30 < y+
(2–42)
The shear from the sharp transition is estimated by the following equation, with the factor of
2 as an empirical parameter:
τi,wave,trans = 2ρcoreUg,trans
2(δwave − δbase)
Lwave(2–43)
For the film in the wave zone, the universal velocity profile is assumed, non-dimensionalized
by wave zone shear, τi,wave. The wave zone gas-liquid interface for the current data is within
the log layer (y+ > 30) of the film, simplifying the velocity profile calculation. The interfacial
velocity of the waves (Ul,i,wave = vwave) and wave zone liquid film flow rate, mfilm,wave, are
33

computed from the following:
U+l,i,wave = 5.5 + 2.5 ln
(δ+wave
)(2–44)
Ul,i,wave = U+l,i,waveu
?wave (2–45)
m+film,wave = −64 + 3δ+
wave + 2.5δ+wave ln
(δ+wave
)(2–46)
mfilm,wave = m+film,waveDµlπ (2–47)
The density of the core (gas and entrained droplets), ρcore, is estimated by mass conservation
in the liquid phase and an assumed homogeneous model in the core:
ml,Ent = ml − ml,film,base (1 − INTw) − ml,film,waveINTw (2–48)
E =ml,Ent
ml
(2–49)
ρcore =ml,Ent + mg
A (Usg + UslE)(2–50)
The wave intermittency, INTw, is estimated by an empirical correlation developed by
Schubring et al. [19]:
INTw,SS = 0.1 +Rel
40000(2–51)
Rel =ρlUslD
µl(2–52)
The droplet deposition flux, RD, is required in the evaluation of pressure drop. The correla-
tion of Ishii and Mishima [59] (Equation 2–53) is used to compute this, which incorporates the
entrained fraction through the use of core density, ρcore.
RD = 0.022 (ρcore − ρg)UsgRe−0.25g
(ρg
ρcore − ρg
)0.26
(2–53)
Reg =ρgUsgD
µg(2–54)
Estimation of average pressure loss is accomplished by independently solving the following
base and wave interfacial shear equations for their respective dP/dz values, as from the work of
Fore et al. [60] (Equations 2–55 and 2–56). The total pressure loss is then calculated using the
34

wave intermittency, INTw:
τi,base = −Dcore,base
4
(1 −
ρcoreU2g,base
Pabs
)dP
dz base(2–55)
−ρcoregDcore,base
4−RD (Ucore,wave − Ul,i,wave)
τi,wave = −Dcore,wave
4
(1 −
ρcoreU2g,wave
Pabs
)dP
dz wave(2–56)
−ρcoregDcore,wave
4−RD (Ucore,wave − Ul,i,wave)
dP
dz= (1 − INTw)
dP
dz base+ INTw
dP
dz wave(2–57)
In a similar fashion, the time-averaged film thickness is computed by:
δ = (1 − INTw) δbase + INTwδwave (2–58)
The final outputs of this model include film height, interfacial velocity (wave velocity for the
wave zone), pressure gradient, and film flow rate. The model performance was evaluated using
annular flow data obtained by Schubring et al. [43, 44]. Outputs for pressure gradient and wave
velocity are reasonable and on par with empirical, single-behavior estimates.
2.4 Application of Literature
The research efforts discussed in this chapter represent only a small fraction of flow
visualization and annular flow literature. The papers selected for this review have been in line
with the goal of the current work – to improve the measurement and modeling of individual
annular flow phenomena. The emphasis on the specific behaviors of annular flow is an important
step to understanding the physics of the flow regime as a whole. The desirable outputs of annular
modeling – pressure gradient and heat transfer – will benefit from the understanding of these
behaviors.
The following chapters focus on the application of two fluid visualization techiniques: PLIF
imaging and high-speed video. Several annular flow observations in the literature are studied
35

and updated using these methods, including base film and wave distributions, interfacial velocity,
disturbance wave lengths, and wave intermittency.
36

CHAPTER 3PLIF EDGE IDENTIFICATION
Film thickness has been described in the literature using a two-zone characterization,
composed of base film and disturbance waves with drastic behavior differences. Due to the
periodic nature of disturbance waves, the measurement of film thickness by most techniques is
preferential to base film. The purpose of this work is to characterize both zones of the liquid film
using PLIF images obtained by Schubring et al. [43]. The current work includes revisions and
improvements to the original algorithm.
3.1 PLIF Optics
A schematic of the test section used for the PLIF image acquisition is shown in Figure 3-1.
The main components in the experimental setup are the flow tube, laser light source, flourescing
dye, digital camera, and lens. Flourinated ethylene propylene (FEP) was selected as the flow tube
material due to the proximity of its refractive index (1.337) to that of water (1.333). This allowed
for accurate near-wall measurements of base film thicknesses, which are generally on the order of
100 µm. The FEP section was encompassed by a square, water-filled chamber and painted black
to reduce ambient light and improve image contrast.
The laser light source was a New Wave Research Solo PIV Nd:YAG that used a commerical
light sheet attachment. The laser sheet entered the enclosure at a 90◦ angle through a viewing
window to avoid refraction at the air-FEP transition. Rhodamine B was used as the flourescing
dye. A Roper-Scientific 1300YHS-DIF camera (1300 by 1030 pixels, inter-line transfer CCD)
was aimed through another viewing window at a 90◦ angle to the laser sheet to view the liquid
cross-section made visible by the flourescing dye.
The current work is based on image sets taken from a lens (Mitutoyo Telecentric Objective
3x, NA = 0.07, nominal working distance 72.5 mm, depth of focus 56 µm) that yielded pixels
3.14 µm in each direction (total axial length: approximately 4 mm). All of the flow conditions
used for the current work are shown in Table A along with gas and liquid superficial velocities.
37

Nd:YAG Laser
CCD Camera
FEP Box
FEP Tube
Viewing Windows
Black Paint
Red Filter
Plane of Focus & Laser Sheet
Figure 3-1. Test section for PLIF measurements. Flow is out of the plane of the page.
3.2 PLIF Processing
PLIF processing uses MATLAB code in three sections: image processing, outlier-removal,
and data processing. The expected shape of the liquid edge is a smooth, continuous, unbroken
line through the length of the image. A metric was developed for the original code, “chaos,” as a
measurement for the lack of continuity in the edge and has been maintained in the current work.
When adjacent axial locations both contain detected edges, the difference in height between the
edge locations is taken to the power of 1.5, with all of these results summed for each image as the
chaos value.
An outlier-removal procedure is performed for the small fraction of PLIF images that are
incorrectly processed. A graphical user interface (GUI) was developed to locate, tag, and purge
poorly processed images. The final data processing section has been developed to quantify film
thickness data and generate figures.
38

3.2.1 PLIF Image Processing
Some obstacles overcome in the liquid edge-finding routine include:
1. Image contrast
2. Single-pixel image noise
3. Bubbles in the gas-liquid interface
4. Out-of-plane features, including droplets near the interface
The image processing is accomplished in the following steps.
Crop. The image is cropped to a specified width to reduce the image processing time and
reduce the impact of droplets at the outer range of the images. The initial crop widths are a
function of the gas flow rates, based on the maximum observed film thickness for each liquid
flow. These values have been presented in Table 3-1.
Table 3-1. Initial crop widths for PLIF image processing.Qg,nom WidthL min−1 µm800 2000
1000 15001200 12501400 11001600 800
Axial Blur. To reduce single-row noise, the image is subjected to a five-pixel blurring
process in the axial direction. The center pixel in the process is a weighted average; the center is
weighted 3, the next adjacent weighted 2, and the ends weighted 1. This process has a negligible
effect on the final edge shape beyond reducing noise-related errors in the edge.
Median Filter. Single-pixel noise in the image is reduced by applying a median filter, found
in the MATLAB image processing toolbox as medfilt2. The filter window is set to 3 pixels in all
directions.
Contrast Adjustment. The raw images are initially too dark for viewing by the human
eye. The pixel range of the images is adjusted using a MATLAB function, imadjust. The main
operation in imadjust is shown in Equation 3–1 where J is the output image, I is the input image,
39

and subscripts min, max, and n represent the minimum, maximum, and current pixel value in
the image, respectively. The exponential weighting factor, γ, has been set to 1.5 and wieghts
the output towards the lower pixel values to help reduce blur in the gas core. This version of the
image, referred to as the adjusted image, is also used later in the process as the user-viewable
version.
Jn = Jmin + (Jmax − Jmin)
[(In − Imin)
(Imax − Imin)
]γ(3–1)
Stretch. The adjusted image is then enhanced a second time by applying a row-by-row
linear stretch of the pixel values, creating a better defined edge for low contrast regions. A
stretching threshold is implemented to ensure that a region is not blurred by this process. A
minimum-to-maximum pixel difference of 74 (out of 255) is required for a row before it is
linearly stretched.
The newly stretched image (Tempstr) is then added to the previous adjusted image
(Adjusted) as in Equation 3–2. The weighting factor for the addition was determined by vi-
sual inspection to reduce the axial noise created by the stretching process.
Stretched = 0.8 × Tempstr + 0.2 × Adjusted (3–2)
Opening / Closing. A morphological opening and closing is applied to the stretched
image with built-in MATLAB functions imopen and imclose to reduce the effects of small-scale
defects in the edge. The first time through the processing, a disk of radius 3 pixels is used as the
morphological structure. All other iterations, which contain edge data and updated image size,
use a variable system of morphological disk radii described in Equation 3–5 (units of pixels).
An image can be subject to three different open/close radii (Roc) depending on the distance
from the channel wall (y) and the array of edge locations (Edge). The parameters C1 and C2 are
distances from the channel wall where the morphological radius changes, and are based on the
height and roughness (standard deviation) of the liquid edge. This system was developed since
higher edge locations (e.g., waves) show more chaotic edge behavior, larger bubbles, and more
40

edge defects. The larger radii are more effective at smoothing this behavior.
C1 = Edge+ 2 × s(Edge) (3–3)
C2 = 1.6C1 (3–4)
Roc(z) =
1 for y(z) ≤ C1
6 for C1 < y(z) ≤ C2
13 for C2 < y(z)
(3–5)
Threshold. The resulting image is cleaned up again using medfilt2 and then subjected
to a film threshold. The threshold value for all data sets is 85 (out of 255). The liquid edge is
represented by a change in the binary value.
Edge Location. The liquid edge is located for each row and recorded into an array. Due to
droplets or other out-of-plane features, there are often multiple possible edge locations. In the
first iteration the edge is recorded as the farthest location from the wall. In subsequent iterations,
the edge is recorded as the edge closest to the wall, which is often the most accurate. This
recording of edge values is compared to the first iteration to find the patches that did not agree
(often corresponding to droplets or bubbles). No edges are recorded within 40 µm of the wall, as
these are generally spurious and do not represent true base film.
Edge Iteration. A system was developed to compare the disagreements in the edge
recordings on the basis of edge continuity. The recorded values that produce a more continuous
liquid edge – not representing entrained droplets or dispersed bubbles – are accepted as the
final values based on local calculations of chaos and standard deviation. The final edge vector
undergoes a one-dimensional median filter (radius of 11 pixels) to remove any remaining pixel
noise.
Bubble Elimination. A bubble reduction algorithm is employed for smaller defects caused
by bubbles in the interface. Any edge perturbation that ranges from 0 to 200 µm in length with
a depression of at least 15 µm is recorded as a defect due to a bubble. Once located, the bubble
section is fixed by linearly interpolating between the outer pixels.
41

Edge Cleaner. An iterative process is performed to eliminate edge locations that are at
least 120 µm from the edge mean (not including edge locations recorded as “zero”) and greater
than 2.4 standard deviations from the mean. This step is more effective at eliminating incorrect
patches of the edge that could not be specifically identified.
Width Iteration. The resulting edge vector is then used to set a new image width and the
entire process is iterated, starting with the crop. The iteration continues until the width of the
image ceases to change (a difference of less than 20µm) or after 10 iterations. This reduction of
image size greatly reduces the required computation of each subsequent iteration and allows for
easier image storage.
Image Storage. To enable a visual inspection, the final edge array is superimposed onto
the adjusted, viewable image as a light blue (cyan) line. The attempts at the iterative edge fixing
method (identified edge points that were not selected) are indicated on the image as green lines.
Bubble removals are indicated by small red lines at the bottom of images. All of the data from
the process is then stored for the following outlier-removal and data processing.
3.2.2 Code Modifications
Many of the features in the current algorithm are similar to the original. The process
described in Section 3.2.1 includes the following changes from the original code.
Initial Crop Width. The original crop widths were determined based on total internal
reflection (TIR) measurements by Schubring [58]. The initial crop widths presented in Table 3-1
have been increased due to larger observed film heights and increased computational power.
Contrast Methods. The use of the γ variable in the MATLAB function imadjust was not
implemented in the original code. This variable weights the images towards the darker pixels and
creates images with better contrast and defined edges.
Stretch Threshold. The stretching threshold was included in the current version to
eliminate issues with noise and blurring from the original process. The final step in this process –
linearly adding the adjusted image to the newly stretched image – was also added to reduce noise.
42

Morphological Radii. The original code only performed the morphological opening and
closing process with one structure and a constant radius (1 pixel). The current variable radius
method uses radii that range from 1 pixel to 13 pixels, depending on the length of the edge. This
is the most computationally expensive operation in the PLIF processing algorithm, doubling the
processing time for each image.
Film Threshold. The binary threshold for the current code has been decreased significantly
from the original due to new contrasting methods. The original image film threshold was 175 (out
of 255) and is now reduced to 85.
Edge Iteration. The concept of edge iteration was introduced in the new code as an
alternative to locating and fixing bubbles. It takes advantage of the iteration that already took
place in the original – centered around reducing the image size.
Bubble Detection. The purpose of the bubble detection in the original algorithm was to find
and eliminate regions of the edge that were perturbed by a bubble, described as a length of edge
150 µm and a mean depression of at least 15 µm relative to the surrounding film height. This
was a constant criteria designed around the average observed bubble at the interface. The current
process detects variable lengths of bubbles, or any similar edge defects, that range from 0 to 200
µm
Image Storage. The edge data from the original algorithm was superimposed onto the
current images at red lines. Example images showing both sets of data are shown in Figure 3-3
and Figure 3-4.
3.2.3 PLIF Outlier Selection GUI
There are certain features of the liquid film that can cause errors in the recorded liquid edge.
Some such issues cause failure in the edge finding routine. It is preferable to locate and reject
such “outlier” images. Any measurement of standard deviation or chaos is not sufficient grounds
for image rejection – highly chaotic edge vectors have occasionally been observed to be accurate.
For this reason, a graphical user interface (GUI) was produced using MATLAB to aid in the
visual identification of outliers.
43

The GUI loads one set of processed flow data at a time and calculates the mean and standard
deviation of all edge values. A list of potential outliers is produced for which the mean of the
edge vector lies outside of a critical range. The default critical range is calculated as 2 standard
deviations away from the mean, but can be modified in the GUI. This criterion primarily locates
edge vectors that are uncharacteristically high. A similar criterion is evaluated using chaos
values, attempting to locate erratic edge vectors. From this list, the user can select an image,
view the image and edge data, and determine whether it qualifies as an outlier. Images were only
rejected if the recorded edge represented the film incorrectly as a result of the following:
Core liquid. Some images show droplets or larger sections of liquid traveling through
the core. This is often much farther from the wall than the liquid film and can skew the data if
detected. However, errors of this kind are generally smaller, as most of the flows tested have low
levels of entrainment. Even if detected, liquid in the core has been observed to affect, at most,
10% of an image. Due to the disparity in the recorded values, any falsely detected liquid in the
core that affects more than 5% of a recorded edge (by visual estimation) is removed.
Out-of-plane features. Some features, unidentifiable as part of the liquid film, show up
in images as large, blurry patches. Some of these issues may be exacerbated by the stretching
routine in the image processing. These sections, much like the core liquid, result in extreme
overestimation of the film. Out-of-plane features also occur in much larger sections, often
affecting over 15% of a recorded edge. All of the images with this type of issue are rejected.
Erratic film sections. Some images show a liquid edge that is extremely erratic and not
well characterized by the image processing. This can be caused by several mechanisms, such
as a large concentration of bubbles at the interface, a large wave with liquid tearing from the
surface, or the rolling/breaking of a large wave. Errors of this type occur at varying levels of
severity (disparity between the recorded edge and the true edge location) and are rejected on a
case-by-case basis.
Some example images that were selected as outliers have been shown in Figure 3-2. The
number of outliers removed for each flow condition (Rej) is shown in the right-hand column of
44

Table A. Typically, between 1% and 5% of the total images in a flow condition are selected as
outliers. An array is created by the GUI that indicates which images were selected, later used in
the data analysis.
3.2.4 PLIF Data Processing
The first step in the data analysis procedure is to convert the results from image processing
to a physical scale, taking into account misalignment from the experimental procedure. The
entire data set was observed to be slightly skewed - the wall location at the top of the image was
found to be 6 pixels (19 µm) to the right of that at the bottom. Each image was linearly adjusted
to compensate for this misalignment.
Film thickness data are then split into two regions using one of two methods. The first is
based on the work of Rodrıguez [21] and uses a critical standard deviation multiplier, kc, to
create the separation criterion. Film height measurements greater than kc standard deviations
from the mean base film height are assumed to be wave measurements. Based on the work of
Schubring [58], a kc value of 2 is used for this analysis. The evaluation of this criterion must be
performed iteratively. The initial assumption for this procedure is that the standard deviation of
the base film is the same as the standard deviation for all film points. This iteration continues
until the base film distribution converges.
An alternate method is to use wave intermittency data as an input for the calculation. Values
for INTw from Chapter 5 have been used as inputs for this method. The main discrepancy
between the INTw and the PLIF data is the use of slightly different tube diameters. There is
also an error associated with the INTw measurements (based on the wave length, velocity and
frequency measurements) that could compound the error for the base/wave division.
After the zone separation, several figures are produced for data analysis. Wave and base
distributions are represented by histograms. The mean and standard deviation of wave and base
film are calculated and plotted as functions of Usg and Usl. Other information is also obtained that
is useful for the optimization of the code, including chaos values for the data set and the number
of points where no edge was detected.
45

Figure 3-2. Example rejected PLIF images for flow conditions (top to bottom) 185F, 166F, 147F,128F, and 109F (constant Usl = 21.1 cm s−1).
46

3.3 PLIF Results
Average film thickness (δ), base film thickness (δbase), and wave height (δwave); their
respective roughnesses (estimated by sample standard deviations); and wave intermittency
(INTw) are shown for all 26 tests in Table A (kc method) and Table A (INTw method).
3.3.1 PLIF Image Comparison
Example processed PLIF images are shown in Figure 3-3 (flow condition 121F) and
Figure 3-4 (flow condition 162F). Each image indicates the edge from the original code (red line)
along with the edge from the current code (blue line) to highlight the code modifications (in the
case of both edge indicators existing in the same space, the red line is visible).
For base film, the difference in edge location is visibly negligible. Most of the differences
are due to larger waves and bubbles, where the interface is not as clearly defined. The images
chosen for this comparison all show structures that the current efforts were directed at improving.
It can be seen from the images that the current code finds slightly higher values at most
locations due to the more aggressive contrasting methods used in the processing. For large waves,
this discrepancy becomes much more apparent, indicating that the original code under-predicted
wave heights. The current code also does a better job at ignoring the structures in the film,
including bubbles.
3.3.2 PLIF Single-Zone Comparison
All of the figures presented for this section include the results of the original code along with
the current results for comparison. Figures 3-5 and 3-6 show film thickness distributions for five
flow conditions with constant liquid flow rate (Usl = 21.1 cm s−1). Figures 3-7 and 3-8 show film
thickness distributions for five flow conditions with constant gas flow rate (Usg = 57 m s−1). All
film thickness distributions are shown in Appendix B.
The main effect of increasing the gas flow rate is a shift of the distribution peak to the
left (lower film thickness). A similar trend is seen in the current results, but the shape of the
distributions are generally taller and narrower. The narrower shape is most apparent in the lowest
47

Figure 3-3. Example processed PLIF images for flow condition 121F. Red line shows originalresults, light blue line shows current results.
48

Figure 3-4. Example processed PLIF images for flow condition 162F. Red line shows originalresults, light blue line shows current results.
49

0 500 1000 15000
1
2
3
4
5
6
7x 10
4
δ [µm]
n pt [−
]
0 500 1000 15000
2
4
6
8
10
12
14x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
1
2
3
4
5
6
7x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
2
4
6
8
10
12x 10
4
δ [µm]
n pt [−
]
Figure 3-5. Histograms of film thickness (base and wave), original results (left) versus currentresults (right). Flow conditions (top to bottom) 109F, 128F, and 147F (constant Usl =21.1 cm s−1).
50

0 200 400 600 8000
1
2
3
4
5
6
7x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 100 200 300 400 500 6000
1
2
3
4
5
6
7
8x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
Figure 3-6. Histograms of film thickness (base and wave), original results (left) versus currentresults (right). Flow conditions (top to bottom) 166F and 185F (constant Usl = 21.1cm s−1).
gas flows (Usg = 36.3 m s−1), indicating that the greatest discrepancy in results occurs at lower
gas flow rates (higher film thicknesses).
Film thickness trends are shown in Figure 3-9 with film roughness, estimated here by a
standard deviation. The average film thickness trends for the new data are similar to those of the
original. The film thickness steadily decreases with increasing gas superficial velocity, with the
decrease slightly steeper than with the original code. The film thickness also tends to increase
with liquid superficial velocity over a larger range than the original (150 µm versus 100 µm).
51

0 200 400 600 800 10000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
1
2
3
4
5
6
7x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
1
2
3
4
5
6
7x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
2
4
6
8
10
12x 10
4
δ [µm]
n pt [−
]
Figure 3-7. Histograms of film thickness (base and wave), original results (left) versus currentresults (Right). Flow conditions (top to bottom) 140F, 143F, and 147F (constant Usg =57 m s−1).
52

0 200 400 600 800 10000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
1
2
3
4
5
6
7x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
2
4
6
8
10
12x 10
4
δ [µm]
n pt [−
]
Figure 3-8. Histograms of film thickness (base and wave), original results (left) versus currentresults (Right). Flow conditions (top to bottom) 151F and 153F (constant Usg = 57 ms−1).
The average film thickness values are all considerably higher. This has been observed
visually in the image comparisons, as the new code generally detects higher film thickness
values, especially for wave sections.
The film roughness trends are also similar but show a considerable increase in film rough-
ness values. The current code appeared to produce smoother edge results, which indicates that the
higher roughness is another effect of detecting larger waves. The relative roughness is also higher
and appears to be a weak function of gas and liquid superficial velocity. An empirical correlation
was developed using flow quality (x) to express this dependence, shown in Equation 3–6. The
error for this correlation is shown in Table 3-2 along with the error from approximating the
53

0 20 40 60 80 100 1200
50
100
150
200
250
300
Usg
[m s−1]
δ [µ
m]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000
50
100
150
200
250
300
350
400
Usg
[m s−1]
δ [µ
m]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 100 1200
20
40
60
80
100
120
140
Usg
[m s−1]
s(δ)
[µ
m]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000
50
100
150
200
250
Usg
[m s−1]
s(δ)
[µ
m]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 100 1200.0
0.1
0.2
0.3
0.4
0.5
Usg
[m s−1]
s(δ)
/δ [−
]
6.312.721.129.633.8U
sl [cm s−1]
0 20 40 60 80 1000.0
0.2
0.4
0.6
0.8
1.0
Usg
[m s−1]
s(δ)
/δ [−
]
6.312.721.129.633.8
Usl [cm s−1]
Figure 3-9. Total film thickness trends, original results (left) versus current results (right). (Top)Average film thickness, (middle) average film roughness (standard deviation of filmthickness), (bottom) Ratio of film roughness to film thickness.
54

data from the average (0.508). The average value produces a reasonable estimate, indicating
that the relative roughness is near constant. However, the mean absolute error (MAE) and the
root-mean-squared error (RMS) are improved by around 50% with the correlation.
s(δ)
δ= 0.33x−0.33 (3–6)
Table 3-2. Error comparison for film thickness relative roughness correlation.Method Error (%) MAE (%) RMS (%)Average −2.93 14.33 19.15New Corr. −0.74 7.92 9.47
3.3.3 PLIF Base and Wave Comparison
The total film thickness distributions have been divided into base and wave zones using the
two methods described in Section 3.2.4 (critical standard deviation multiplier method, kc, and
intermittency input method, INTw).
3.3.3.1 Critical Standard Deviation Multiplier Method
Figures 3-10 and 3-11 show base film thickness distributions for five flow conditions
(constant liquid flow, Usl = 21.1 cm s−1). The shape of the base film distributions have changed
very little with the new code. The location and magnitude of the peaks are comparable, although
data are extended to the right.
The base film trends, shown in Figure 3-12, support these observations. The magnitudes
and slopes have changed very little for both the average base film thickness and the average
roughness. The relative roughness indicates a constant ratio of base roughness to base height
(0.3), consistent with the modeling effort of Schubring and Shedd [1]. Only a weak dependence
on gas flow rate remains.
Figures 3-13 and 3-14 show wave height distributions for the same flow conditions. All
of the distributions show a more pronounced tail to the right, indicating higher wave height
measurements. For some gas flow rates (e.g. 1400 L min−1) the maximum measured wave height
has been increased by over 200 µm.
55

0 50 100 150 200 250 300 3500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure 3-10. Histograms of base film using kc method, original results (left) versus current results(right). Flow conditions (top to bottom) 109F, 128F, and 147F (constant Usl = 21.1cm s−1).
56

0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 1500
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
0 50 100 1500
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
Figure 3-11. Histograms of base film using kc method, original results (left) versus current results(right). Flow conditions (top to bottom) 166F and 185F (constant Usl = 21.1 cms−1).
The wave height trends, shown in Figure 3-15, show that there has been a dramatic increase
in average wave height values. Wave height also appears as a much stronger function of gas flow
rate as indicated by the steeper slope. The roughness has also increased dramatically, showing
a much higher fluctuation within the wave zone. The relative roughness has increased from
about 0.2 to about 0.3 and shows a new dependence on gas flow rate (although very slight). The
wave-to-base ratios, shown in Figure 3-16, indicate that the new code indeed finds higher waves,
showing an increase in average wave-to-base ratio from about 2 to 2.5.
The remainder of the film thickness distributions generated using the kc method are shown
in Appendix C.
57
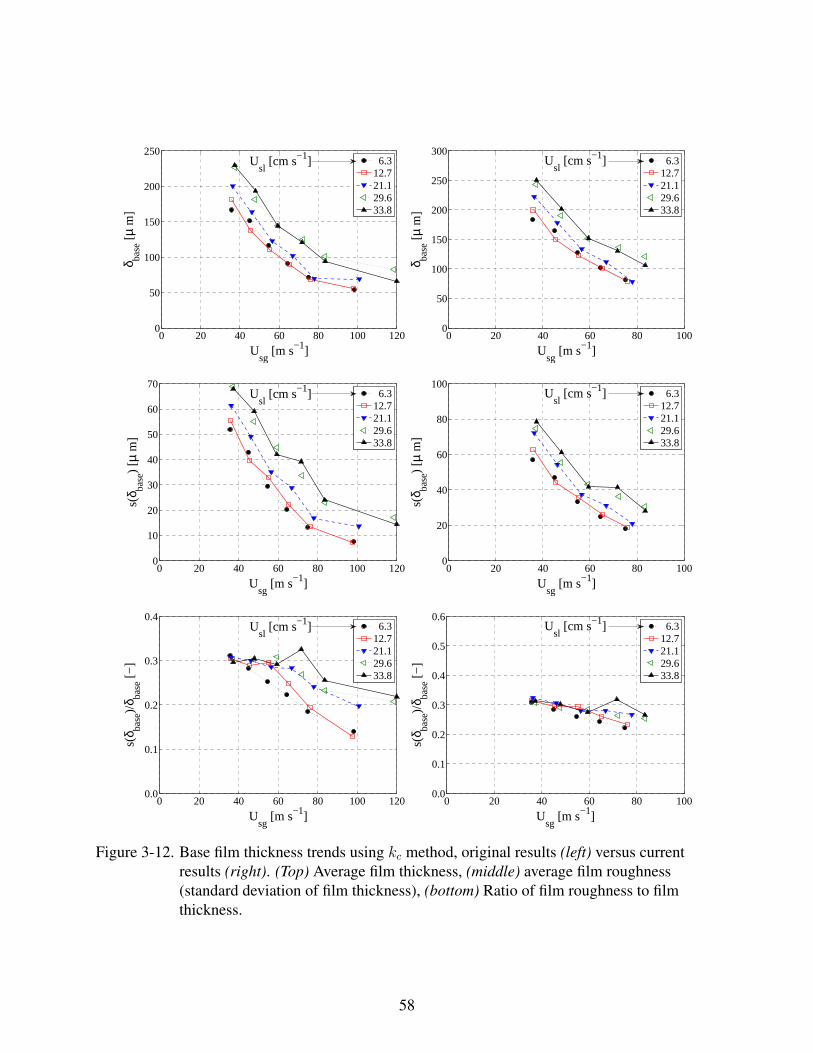
0 20 40 60 80 100 1200
50
100
150
200
250
Usg
[m s−1]
δ base [
µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000
50
100
150
200
250
300
Usg
[m s−1]
δ base [
µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 100 1200
10
20
30
40
50
60
70
Usg
[m s−1]
s(δ ba
se)
[µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000
20
40
60
80
100
Usg
[m s−1]
s(δ ba
se)
[µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 100 1200.0
0.1
0.2
0.3
0.4
Usg
[m s−1]
s(δ ba
se)/
δ base [−
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000.0
0.1
0.2
0.3
0.4
0.5
0.6
Usg
[m s−1]
s(δ ba
se)/
δ base [−
]
6.312.721.129.633.8
Usl [cm s−1]
Figure 3-12. Base film thickness trends using kc method, original results (left) versus currentresults (right). (Top) Average film thickness, (middle) average film roughness(standard deviation of film thickness), (bottom) Ratio of film roughness to filmthickness.
58

0 500 1000 15000
2000
4000
6000
8000
10000
12000
14000
δ [µm]
n pt [−
]
0 500 1000 15000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
δ [µm]
n pt [−
]
Figure 3-13. Histograms of wave height using kc method, original results (left) versus currentresults (right). Flow conditions (top to bottom) 109F, 128F, and 147F (constant Usl= 21.1 cm s−1).
59

0 200 400 600 8000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 100 200 300 400 500 6000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure 3-14. Histograms of wave height using kc method, original results (left) versus currentresults (right). Flow conditions (top to bottom) 166F and 185F (constant Usl = 21.1cm s−1).
3.3.3.2 Intermittency Input Method
The INTw distributions are not compared directly to the original code in the same manner
as the kc distributions. The current data processing uses INTw values from Chapter 5 that differ
from those used in the work of Schubring [58], which would undermine such a comparison.
Instead, the film thickness trends of the kc and INTw methods have been compared to each other
in Figures 3-17 through 3-19. The base and wave distributions generated using this method are
shown in Appendix D.
Average base film trends are shown in Figure 3-17. The values for the INTw method are
generally higher and show a steeper slope, indicating a stronger dependence on gas flow rate. The
60

0 20 40 60 80 100 1200
100
200
300
400
500
Usg
[m s−1]
δ wav
e [µ
m]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000
100
200
300
400
500
600
700
Usg
[m s−1]
δ wav
e [µ
m]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 100 1200
20
40
60
80
100
120
140
Usg
[m s−1]
s(δ w
ave)
[µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000
50
100
150
200
250
Usg
[m s−1]
s(δ w
ave)
[µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 100 1200.0
0.1
0.2
0.3
0.4
Usg
[m s−1]
s(δ w
ave)/
δ wav
e [−]
6.312.721.129.633.8U
sl [cm s−1]
0 20 40 60 80 1000.0
0.1
0.2
0.3
0.4
0.5
0.6
Usg
[m s−1]
s(δ w
ave)/
δ wav
e [−]
6.312.721.129.633.8
Usl [cm s−1]
Figure 3-15. Wave height trends using kc method, original results (left) versus current results(right). (Top) Average film thickness, (middle) average film roughness (standarddeviation of film thickness), (bottom) Ratio of film roughness to film thickness.
61

0 20 40 60 80 100 1201.0
1.5
2.0
2.5
3.0
Usg
[m s−1]
δ wav
e/δba
se [−
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1001.0
1.5
2.0
2.5
3.0
Usg
[m s−1]
δ wav
e/δba
se [−
]
6.312.721.129.633.8
Usl [cm s−1]
Figure 3-16. Ratio of wave height to base film using kc method, original results (left) versuscurrent results (right).
relative roughness has also increased by a few percent. Many of the trends discussed with data
from the kc method are still apparent.
Average wave height trends are shown in Figure 3-18. Similar to the base film, the average
wave height values have increased and the slope has become steeper. This is to be expected if
the INTw method creates a separation criterion higher than the kc method – both averages will
increase. The roughness in the wave zone is consistent between both methods, which creates a
decrease in the relative roughness for INTw by a few percent.
Figure 3-19 shows wave-to-base ratios after the zone separation. The INTw values are
directly related to these ratios, which clearly show functions of both gas and liquid flow rates.
The lower water flow rates, 800 and 1000 L min−1, show very erratic behavior as a function of
gas flow. The wave-to-base ratio has been empirically correlated using flow quality (x), shown in
Equation 3–7. The error for this correlation has also been calculated, shown in Table 3-3.
δwaveδbase
= 1.86x−0.18 (3–7)
Table 3-3. Error calculations for base-to-wave ratio correlation.Error (%) MAE (%) RMS (%)−0.25 6.74 8.13
62

0 20 40 60 80 1000
50
100
150
200
250
300
Usg
[m s−1]
δ base [
µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000
50
100
150
200
250
300
Usg
[m s−1]
δ base [
µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000
20
40
60
80
100
Usg
[m s−1]
s(δ ba
se)
[µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000
20
40
60
80
100
Usg
[m s−1]
s(δ ba
se)
[µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000.0
0.1
0.2
0.3
0.4
0.5
0.6
Usg
[m s−1]
s(δ ba
se)/
δ base [−
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000.0
0.1
0.2
0.3
0.4
0.5
0.6
Usg
[m s−1]
s(δ ba
se)/
δ base [−
]
6.312.721.129.633.8
Usl [cm s−1]
Figure 3-17. Base film thickness trends, kc method (left) versus INTw method (right). (Top)Average film thickness, (middle) average film roughness (standard deviation of filmthickness), (bottom) Ratio of film roughness to film thickness.
63

0 20 40 60 80 1000
100
200
300
400
500
600
700
Usg
[m s−1]
δ wav
e [µ
m]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000
50
100
150
200
250
Usg
[m s−1]
s(δ w
ave)
[µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 20 40 60 80 1000.0
0.1
0.2
0.3
0.4
0.5
0.6
Usg
[m s−1]
s(δ w
ave)/
δ wav
e [−]
6.312.721.129.633.8
Usl [cm s−1]
Figure 3-18. Wave height trends, kc method (left) versus INTw method (right). (Top) Averagefilm thickness, (middle) average film roughness (standard deviation of filmthickness), (bottom) Ratio of film roughness to film thickness.
64

0 20 40 60 80 1001.0
1.5
2.0
2.5
3.0
Usg
[m s−1]
δ wav
e/δba
se [−
]
6.312.721.129.633.8
Usl [cm s−1]
Figure 3-19. Ratio of wave height to base film, kc method (Left) versus INTw method (right).
65

CHAPTER 4PLIF INTERFACE TRACKING
Most of the PLIF images have been taken with a very large time separation to ensure
independent measurements. By taking PLIF images at much shorter time intervals, the movement
of the gas-liquid interface can be observed. Global models require and estimate of this, for
which a linear relationship (Schubring and Shedd [1]) or the UVP (Equation 2–42, Owen and
Hewitt [61]) in the film has been assumed.
The characterization of the gas-liquid interface is highly dependent on disturbance wave
behavior, as demonstrated in the literature (e.g., Azzopardi [45, 46]). PLIF images allow for the
separation of base film and wave behavior, unavailable by other film thickness measurement
techniques.
The raw data for short time delay PLIF pairs was acquired by Schubring [58] with the same
apparatus used in Chapter 3. The time delays for each image set were selected to produce pairs
appropriate for cross-correlation (roughly 50 pixels in distance). The flow conditions tested for
this work, along with the time delay for each set, are shown in Table E-1. The current chapter
includes preliminary findings as well as challenges and suggestions for future work.
4.1 PLIF Image Pair Processing
Four stages of processing are used to transform PLIF image pairs into reviewable trend plots
for interfacial velocity. A diagram of stages 1 through 3 is shown in Figure 4-1.
1. Each image is processed to identify the liquid edge.
2. Each pair is split into sections and individually correlated to identify the appropriate lagdistances.
3. The raw data is processed through outlier removal, conversion to physical scale, andnon-dimensionalization.
4. The processed data is compared to liquid velocity models, including
(a) The universal velocity profile (for individual flow conditions), and
(b) The van Driest model for continuous law of the wall (for multiple flow conditions).
66

Image Processing / Edge Location Image Processing / Edge Location
Raw Image 1 Raw Image 2
Processed Image 1
Processed Image 2
Edge Locations 1
(pixels)
EdgeLocations 2
(pixels)
Cross-Correlation
Images:Combined and Shifted
Pairs
Graph: Correlation vs.
Image LagCorrelation Data
(pixels)Flow Rates and Flow Parameters
Base / Wave Division Criteria
Elapsed Time (Δt)
Data Processing and Fitting
Graph: y+ vs u
i+
(total)
Number ofDivisions (2)
Graph:y+ vs u
i+
(flow condition)
Figure 4-1. Diagram of processing path for PLIF interface tracking.
67

4.1.1 PLIF Image Pair Edge Processing
The work of Schubring [58] discussed some difficulties associated with cross-correlating
PLIF edge vectors. Most of the issues were focused on accurately detecting the liquid edge, often
complicated by bubbles in the interface. Many of these issues have been addressed by adjusting
the PLIF edge finding routine, outlined in Chapter 3. The edge processing for tracking the liquid
interface utilizes the edge processing code developed in Section 3.2. The actual image processing
and edge finding routines are identical except for the film thickness threshold, which needed to be
adjusted due to reduced contrast between gas and liquid for the PLIF image pairs.
The varying level of quality from one image to the next made a constant threshold difficult
to determine. This version of the PLIF edge finding code employs a histogram-based threshold
selection method developed by Otsu [62]. Otsu’s method iteratively determines the most accurate
threshold value based on the reduction of variance in the thresholded section. It has been
observed to create accurate results in a higher range of image qualities by visual inspection.
4.1.2 PLIF Image Pair Divisions
Each image has an axial distance of 1300 pixels, or about 4 mm. As a result, the film
thickness may vary from base to wave within an image. Large bubbles may also obscure
interface. This poses a problem to correlating the image pairs, as different film heights and film
features move at different velocities. This also poses a problem for developing velocity as a
function of distance from the wall if the wall height for an image pair is not clearly defined.
Each image pair is split into two sections, each 650 pixels in length. The remainder of the
image pair processing scheme is performed on each section individually. Other numbers of
sections were considered. However, as the size of the image pairs decreased, the chances of poor
correlation increase due to a lack of features in the liquid edge. Splitting the images into two
sections yielded the most consistent cross-correlation success.
4.1.3 PLIF Image Pair Cross-Correlation
This stage of the processing uses cross-correlation to determine the most accurate distance
lag between the edge vectors. The cross-correlation is performed using a built-in MATLAB
68

function, which takes each edge vector as an input and returns an array of correlation values
(between -1 and 1, termed Xcorr). The values of Xcorr correspond to the distances that the
edge vectors were lagged, termed Lag.
The appropriate correlated distance between an image pair is found as the maximum value
of Xcorr for Lag values between -100 and 600 pixels. A negative value for Lag would represent
a negative velocity, which may be physically accurate in some cases due to local flooding.
However, Lag values less than -100 pixels (-0.3 mm) most often correspond to broken sections of
film or the incorrect correlation of features. High Xcorr values may often occur near the ends of
the edge vectors (Lag > 600). This is generally due to coincidental agreement at the edge ends,
and so any Lag value over 600 pixels (1.9 mm) is ignored.
This stage of the code also outputs figures for verification of the edge finding and correlation
process. A graph of Xcorr versus Lag is produced for each original image pair that includes a
line for each image section. This figure also includes the recorded value of Lag for each image
section. An example correlation graph for each gas flow rate is shown in Figure 4-2.
A combined image is produced for each correlated image pair that includes each edge vector
superimposed on one image, shifted by the recorded Lag value for verification. The compiled
images that correspond to the correlation graphs in Figure 4-2 are shown in Figure 4-3. Each
image has the first image of the pair on top and the second one the bottom. The yellow line is the
liquid edge of the first image, shifted and superimposed on the liquid edge of the second image
(cyan line).
4.1.4 PLIF Image Pair Data Processing
This stage of the image pair processing uses the physical pixel scale of the images and a
priori knowledge of flow conditions to input fluid properties for velocity and distance calculation.
The raw interfacial velocity, ui, is calculated from the physical distance traveled by the film over
the known elapsed time, ∆t. The distance from the wall, y, was calculated as the average of both
edge vectors for an image pair (not including zeros). The non-dimensionalization is performed
69

−600 −400 −200 0 200 400 600−0.5
0
0.5
1
Lag (pixels)
X−
corr
[−]
Section 1 Lag = 77Section 2 Lag = 75
−600 −400 −200 0 200 400 600−0.5
0
0.5
1
Lag (pixels)
X−
corr
[−]
Section 1 Lag = 33Section 2 Lag = 32
−600 −400 −200 0 200 400 600−0.5
0
0.5
1
Lag (pixels)
X−
corr
[−]
Section 1 Lag = 65Section 2 Lag = 76
−600 −400 −200 0 200 400 600−0.5
0
0.5
1
Lag (pixels)
X−
corr
[−]
Section 1 Lag = 68Section 2 Lag = 54
−600 −400 −200 0 200 400 600−0.5
0
0.5
1
Lag (pixels)
X−
corr
[−]
Section 1 Lag = 53Section 2 Lag = 47
Figure 4-2. PLIF cross-correlation example graphs from flow conditions (top left) 105F, (topright) 126F, (middle left) 143F, (middle right) 164F, (bottom) 181F.
from the following:
u+i =
uiu?
(4–1)
y+ =yu?
νl(4–2)
70

Figure 4-3. PLIF cross-correlation example images, (left) section 1, (right) section 2. Taken fromflow conditions (top to bottom) 105F, 126F, 143F, 164F, and 181F.
u? =
√τi,waveρl
(4–3)
where ui is the measured interfacial velocity, u+i is the dimensionless interfacial velocity, y+ is a
wall unit, and τi,wave is calculated from Equation 2–56.
Each PLIF image pair is marked as wave or base film using intermittency data from
Chapter 5. The division is based on the average film thickness of each correlated pair, not
including zeros in the edge vectors. The total list of film points is then sorted and separated based
71

on the recorded wave intermittency for that flow condition. Data points that represent wave film
are displayed as red dots and base film sections are displayed as blue dots.
4.1.4.1 PLIF Image Pair Outlier Removal
It was demonstrated in Section 3.2.3 that there is an error associated with PLIF processing
that results in poorly identified liquid edges up to 5% of the time. PLIF interface tracking
requires that both images in a pair be correctly processed, which compounds that error. In
addition, the use of cross-correlation is dependent on features of the interface being present and
identified in both images.
An image pair is accepted as a data point if it meets all three of the following criteria:
1. The lag distance must be within three standard deviations away from the mean lag for aflow condition.
2. The maximum Xcorr value must be greater than 0.25.
3. Over half of the edge vector must be recorded as an edge (not a zero).
4.1.4.2 Van Driest Model Data Fitting
The non-dimensionalized data points for the 800 L min−1 and 1200 L min−1 gas flow
rate conditions were combined for a more comprehensive data fit. The Van Driest model for a
continuous law of the wall, described in Kays et al. [2], has been used for this purpose. The
model introduces an empirical constant, A+, and an integral that must be evaluated numerically:∫ u+
u+o
du+ =1
κ
∫ y+
y+o
dy+
y+[1 − exp
(− y+
A+
)] (4–4)
where κ is the von Karman constant (0.41), and u+o and y+
o are the lower bounds of the model.
The van Driest model was developed to extend to the viscous sublayer, eliminating the need for
a buffer layer in the UVP. Therefore, the values below the bounds of the van Driest model are
assumed to obey the viscous sublayer (u+ = y+) and the lower bounds are set equal to eachother.
The value for u+o is then determined by solving the following:
1
κ= u+
o
[1 − exp
(− u+
o
A+
)](4–5)
72
The empirical constant A+ was determined by trial and error, beginning with the value
of 25.0 suggested in Kays et al. The goodness of fit was optimized using the coefficient of
determination, R2. Similar to the individual flow configuration plots, the data for this study has
been divided into base sections (blue) and wave sections (red) using intermittency inputs from
Chapter 5.
4.2 PLIF Image Pair Results
Non-dimensional interfacial velocity (u+i ) graphs for selected flow conditions are shown in
Figure 4.2 (800 L min−1 gas flow rates) and Figure 4-5 (1200 L min−1 gas flow rates). Graphs
for the remainder of the flow conditions are shown in Appendix F. All velocity graphs are shown
as a function of wall units (y+) and include comparison lines for the UVP (dashed line) and an
extension of the viscous sublayer (u+i = y+, solid line). Average u+
i and average y+ for each flow
condition are shown in Table E-1.
None of the flow conditions show distinct trends of y+ versus u+. There is a slight trend of
increasing velocity with increased film thickness, as expected. The velocity measurements also
become much more sporadic with increasing film thickness. The maximum velocity and film
thickness measurements also increase with increasing liquid flow rate.
The UVP shows a reasonable agreement with the data, but tends to under-predict y+ (or
over-predict u+i ) for the majority of the base film. The UVP is an acceptable trend line for the
wave data, but the spread is too wide by that point for any accurate prediction of wave behavior.
The viscous sublayer line is an effective minimum for y+ values for most flow conditions.
Figure 4-6 shows the mean u+i and y+ values for each flow condition, linked by similar
values of superficial gas velocity. The lowest values of average y+ correspond to the lowest liquid
flow and y+ increases with Usl. However, neither gas or liquid flow rates have a strong effect on
u+i , which could be approximated with an average value of 9. This is different from what would
be expcted for wave velocities alone, which have been observed to increase with increasing gas
flow.
73

0 10 20 30 400
10
20
30
40
50
60
70
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 400
10
20
30
40
50
60
70
80
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 40 500
20
40
60
80
100
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 5 10 15 20 25 30 350
20
40
60
80
100
120
140
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
Figure 4-4. y+ vs. u+i plots for flow conditions (top left) 102F, (top right) 105F, (bottom left)
109F, and (bottom right) 113F. (Approximate Usg = 36 m s−1).
The result of the van Driest model data fit is shown in Figure 4-7 using a value of 34.0 for
A+. As with UVP curves for individual flow condtions, this model tends to under-predict the
base film velocity. The model also turns upwards sharply, failing to predict any u+i values much
over 20. However, the wide distribution of film thickness and velocity measurements would make
fitting this data difficult with any model, as evident in the wave section.
74

0 10 20 30 40 500
10
20
30
40
50
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 40 500
10
20
30
40
50
60
70
80
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 40 500
10
20
30
40
50
60
70
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 5 10 15 20 25 30 350
50
100
150
200
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
Figure 4-5. y+ vs. u+i plots for flow conditions (top left) 140F, (top right) 143F, (bottom left)
147F, (bottom right) 151F. (Approximate Usg = 57 m s−1).
0 5 10 15 200
10
20
30
40
50
Ui+ [−]
δ + [−
]
36.145.855.865.976.8
Usg
[m s−1]
Figure 4-6. Average y+ vs. u+i , by Usg.
75

0 10 20 30 40 50 600
20
40
60
80
100
120
Ui+
y+ (m
ean)
Ui+ Base
Ui+ Wave
van Driest
Figure 4-7. PLIF interfacial velocity data (with van Driest model). Flow conditions included:102F, 105F, 109F, 113F, 140F, 143F, 147F, and 151F.
76

CHAPTER 5VERTICAL WAVE LENGTH MEASUREMENT
High-speed videos of many vertical annular flow conditions were acquired and analyzed in
the work of Schubring, Shedd and Hurlburt [19] and in the dissertation of Schubring [58]. The
two major objectives of the studies were to:
• Demonstrate the use of high-speed video to estimate the velocities, lengths, and temporalspacings of individual waves.
• Use these individual wave measurements to develop average velocites, lengths, frequenciesand intermittencies of disturbance waves as functions of gas and liquid flow rates.
The current work is an extension of one aspect of the original vertical wave processing code
– wave length measurement. A new wave length measurement technique has been developed to
address the circumferential asymmetry of disturbance waves traveling through a vertical tube.
All other aspects of the processing are identical including identification, velocity, and frequency
measurements. The goal of the current work is to use the new processing method to study the
effect of circumferential asymmetry on wave behavior.
5.1 Vertical Wave Video Acquisition
A vertical test facility was constructed around a quartz tube with an inner diameter of 0.0234
m (23.4 mm), shown in Figure 5-1. All aspects of this flow loop are identical to that used for
the PLIF measurements (Chapter 3) with the exception of the test section tube material and
diameter. Liquid and gas mass flow rates and superficial velocities were recorded using flow
meters coupled with static pressure measurements. Liquid superficial velocities in the present
work range from 0.04 to 0.39 m/s, with gas superficial velocities between 36 and 82 m/s. Test
section pressures ranged from 100 to 116 kPa.
A 0.303 m long region of the tube was back lit with five lights and imaged with an In-
tegrated Design Tools X-Stream VISION XS-3 high-speed CMOS digital camera in 8-bit
grayscale. Waves appear in the test region as dark patches that pass over each of the five lights
in sequence. The conversion to physical scale was accomplished by also recording video of a
ruler, shown in Figure 5-2. The pixels were 242 µm squares. The total image resolution was 1252
77

(Waves)(P)
(dP)
Separator Exhaust
Air Rotameters(P)
Compressed Air (from lab)
Water Meter
Gear Pump
Copper (below)/Quartz (above) Boundary
Reservoir
Air Flow Straighteners
Figure 5-1. Schematic of vertical flow loop with quartz test section.
pixels (axial length) by 112 or 120 pixels (width). Regions exposed to each light were used as
virtual detectors for the identification and tracking of disturbance waves.
Figure 5-2. Visualization section for vertical waves, including measurement for physical scale.
The frame rate for the video aqcuisition was varied based on the observation that wave
velocity increases with increasing gas flow. The frame rate was increased with increasing gas
velocity as indicated in Table 5-1. The video duration was also altered to maintain a consistent
number of frames for processing. The initial video outputs (saved as .avi files) were separated
into uncompressed .tif images for analysis.
Every aspect of the original vertical high-speed video processing code (MATLAB-based)
has been maintained except for the wave length measurement method. The code begins with
78

Table 5-1. Frame rates and video lengths for vertical wave videosQg,nom [L min−1] fps [s−1] tvideo [s] nframes [-]
800 400 11 44001000 500 10 50001200 600 9 54001400 700 8 56001600 800 7 56001800 900 6 5400
wave identification, accomplished using the score of wave, a metric developed by Schubring
et al. [19] for wave tracking. The score is calculated as a function of the peak-normalized
darkness, summed over three consecutive video frames. The code proceeds with wave tracking
(unchanged), wave verification (unchanged), and wave length measurement (discussed below).
5.2 Vertical Wave Length Processing
Two measurement techniques have been applied to estimate the length of disturbance waves,
a single-section measurement (original code) and a multi-section measurement (current code). A
schematic of the two measurement techniques is shown in Figure 5-3, where L1 represents the
original estimate and L2 is the current estimate. The single-section method proceeds by locating
the center of the wave (darkest section), then scanning in both directions to find the forward
and rear edges of the wave. The wave is then recorded as the difference between the two edge
recordings. A more detailed description of the original processing code is provided by Schubring
et al. [19].
The multi-section method proceeds by identifying the center of the wave in the same manner
as the original code. The image is then split into four equal sections (Img(sec), sec = 1 through
4) along the tube width. Each section is then averaged along its width to produce avedarki(sec),
then normalized by the time-independent average for the entire flow condition (avedarkX) to
produce ddarki(sec), shown in Equation 5–1. All of the elements in Equation 5–1 are arrays
with a pixel length equal to the length of the test section.
ddarki(sec) = Img(sec) − avedarkX (5–1)
79
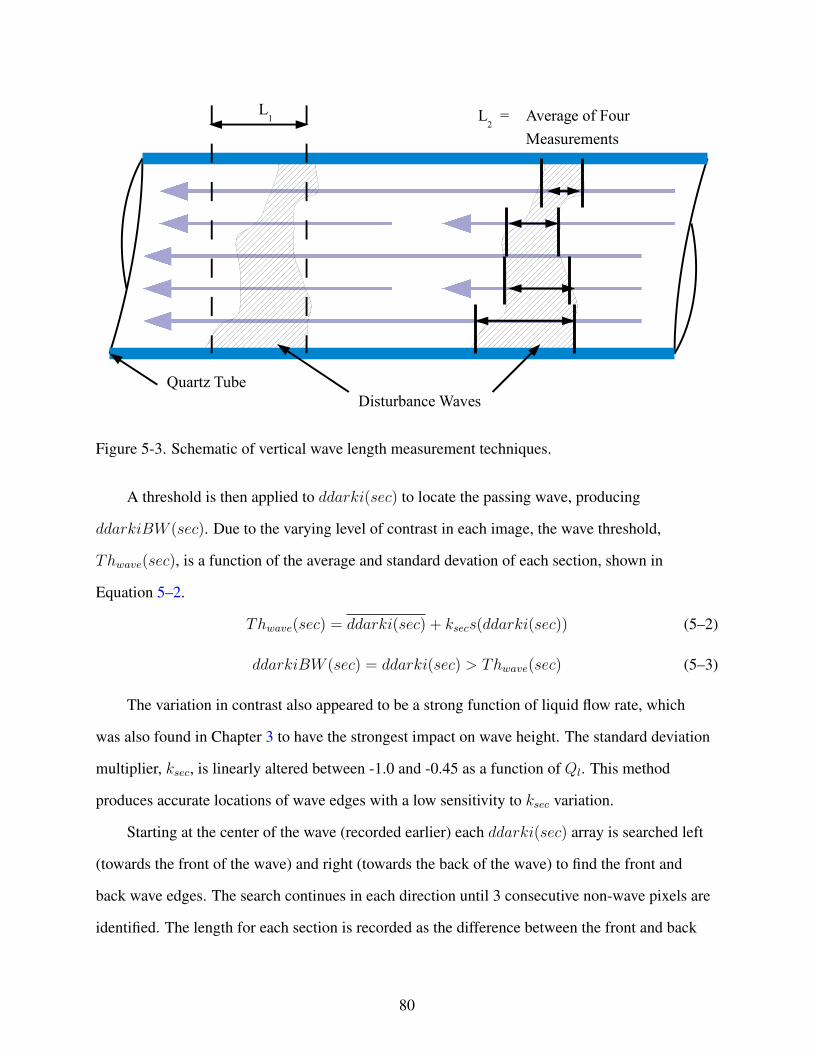
L1 L
2 = Average of Four
Measurements
Quartz TubeDisturbance Waves
Figure 5-3. Schematic of vertical wave length measurement techniques.
A threshold is then applied to ddarki(sec) to locate the passing wave, producing
ddarkiBW (sec). Due to the varying level of contrast in each image, the wave threshold,
Thwave(sec), is a function of the average and standard devation of each section, shown in
Equation 5–2.
Thwave(sec) = ddarki(sec) + ksecs(ddarki(sec)) (5–2)
ddarkiBW (sec) = ddarki(sec) > Thwave(sec) (5–3)
The variation in contrast also appeared to be a strong function of liquid flow rate, which
was also found in Chapter 3 to have the strongest impact on wave height. The standard deviation
multiplier, ksec, is linearly altered between -1.0 and -0.45 as a function of Ql. This method
produces accurate locations of wave edges with a low sensitivity to ksec variation.
Starting at the center of the wave (recorded earlier) each ddarki(sec) array is searched left
(towards the front of the wave) and right (towards the back of the wave) to find the front and
back wave edges. The search continues in each direction until 3 consecutive non-wave pixels are
identified. The length for each section is recorded as the difference between the front and back
80

edges. The wave length for the image (Lwave) is recorded as the average of all four wave section
measurements (Lsec, Equation 5–5) and converted to a physical scale. The wave intermittency for
the flow condition is then calculated from the following:
INTw =Lwavefwavevwave
(5–4)
Lwave =1
4
4∑i=1
Lsec,i (5–5)
The program outputs the original image with all four wave section measurements superim-
posed (as solid lines) and the results of the single-section measurement from the original code (as
dashed lines). Average values of wave length (Lwave), wave frequency (fwave), and wave velocity
(vwave) are calculated for each flow condition.
5.3 Vertical Wave Length Results
Wave length (Lwave) and wave intermittency (INTw) measurements are recorded in
Appendix G for all flow conditions along with gas and liquid superficial velocities.
5.3.1 Individual Wave Length Results
Example images with both wave length measurement techniques are shown in Figure 5-4 for
increasing gas flow, where dashed lines indicate the single-measurement method and solid lines
indicate the multi-measurement method. Additional wave measurement examples are shown in
Appendix H for increasing liquid flow.
Disturbance waves are not always symmetric around the circumference of the tube. A wave
is often observed to be thicker in certain sections or travel with a slant through the tube. The
observation of assymetry in disturbance waves has also been addressed by Belt [20] through the
use of three-dimensional conductance probe measurements.
The single-section measurement technique records all wave edges at the left and right
extremes, and is therefore over-estimating the length of assymetrical features. This can be seen
in Figure 5-4, where the distance between dashed lines is consistently larger than between solid
lines.
81
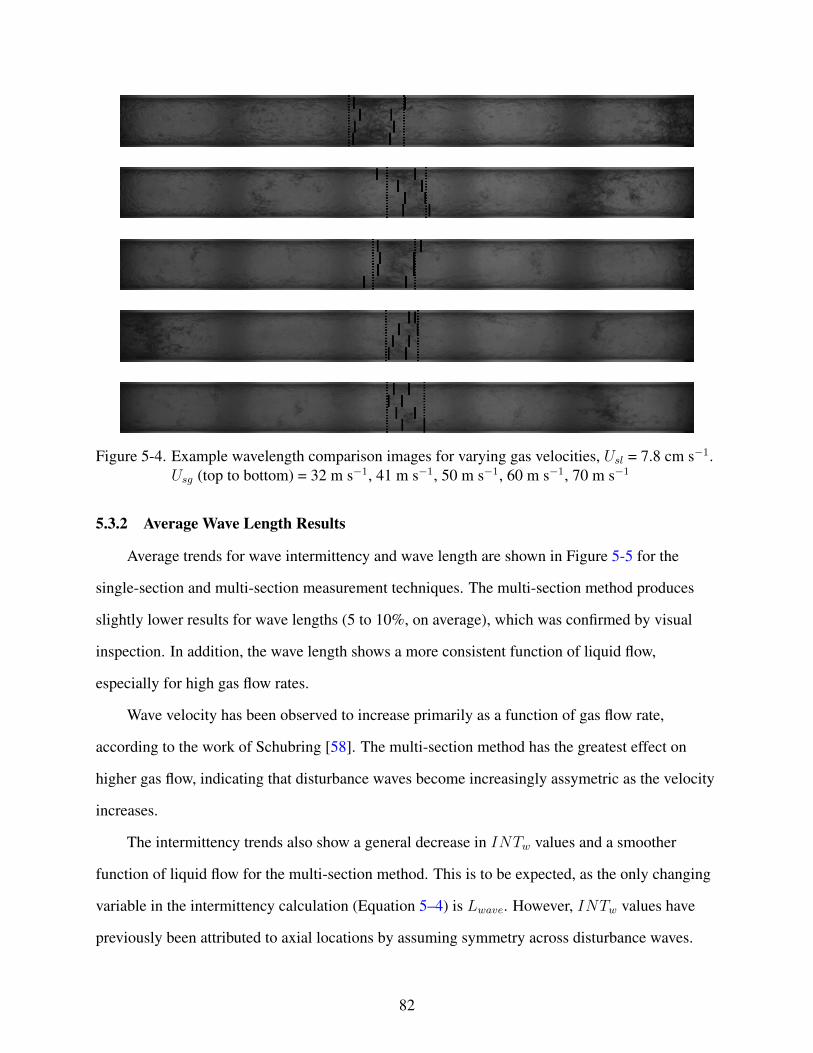
Figure 5-4. Example wavelength comparison images for varying gas velocities, Usl = 7.8 cm s−1.Usg (top to bottom) = 32 m s−1, 41 m s−1, 50 m s−1, 60 m s−1, 70 m s−1
5.3.2 Average Wave Length Results
Average trends for wave intermittency and wave length are shown in Figure 5-5 for the
single-section and multi-section measurement techniques. The multi-section method produces
slightly lower results for wave lengths (5 to 10%, on average), which was confirmed by visual
inspection. In addition, the wave length shows a more consistent function of liquid flow,
especially for high gas flow rates.
Wave velocity has been observed to increase primarily as a function of gas flow rate,
according to the work of Schubring [58]. The multi-section method has the greatest effect on
higher gas flow, indicating that disturbance waves become increasingly assymetric as the velocity
increases.
The intermittency trends also show a general decrease in INTw values and a smoother
function of liquid flow for the multi-section method. This is to be expected, as the only changing
variable in the intermittency calculation (Equation 5–4) is Lwave. However, INTw values have
previously been attributed to axial locations by assuming symmetry across disturbance waves.
82

0 10 20 30 40 500.00
0.01
0.02
0.03
0.04
0.05
0.06
Usl [cm s−1]
Lw
ave [m
]
3443536576
Usg
[m s−1]
0 10 20 30 40 500.00
0.01
0.02
0.03
0.04
0.05
0.06
Usl [cm s−1]
Lw
ave [m
]
3443536576
Usg
[m s−1]
0 10 20 30 40 500.00
0.05
0.10
0.15
0.20
0.25
0.30
Usl [cm s−1]
INT
w [−
]
3443536576
Usg
[m s−1]
0 10 20 30 40 500.00
0.05
0.10
0.15
0.20
0.25
0.30
Usl [cm s−1]
INT
w [−
]
3443536576
Usg
[m s−1]
Figure 5-5. (Top) Lwave vs. Usl, by Usg. (Bottom) INTw vs. Usl, by Usg. (Left) Single-sectionwave length measurement technique. (Right) Multiple-section wave lengthmeasurement technique.
The application of the multi-section method removes the assumption of symmetry, and thereby
relocates wave behavior from an axial location to a location on the liquid film. This change in
location has a direct impact on two-zone modeling efforts, including Hurlburt et al. [57] and
Schubring et al. [1], ans is more consistent with an application of film modeling.
5.3.3 Wave Correlations
Emprical correlations were developed for the single-section data in the work of Schubring [58].
The correlations for Lwave and INTw have been re-optimized for the multi-section data:
Lwave,KS = 0.43D
x0.63(5–6)
INTw,KS = 0.07 +Rel
49000(5–7)
83

These correlations’ performance is shown in Figure 5-6; all vertical-specific correlations are
judged as shown in Table 5-2, based on flows with Qg,nom of 800 to 1600 L min−1 (i.e., those
plotted in this chapter).
Table 5-2. Performance of vertical-specific wave correlationsCorrelated Parameter Mean Error [%] MAE [%] RMS [%]Lwave,KS −1.58 15.91 20.50INTw,KS −1.10 9.47 12.13
0 1 2 3 4 5 60
1
2
3
4
5
6
Lwave
[m]
Lw
ave,
KS [m
]
3443536576± 20%
Usg
[m s−1]
0 1 2 3 4 5 60
1
2
3
4
5
6
Lwave
[m]
Lw
ave,
KS [m
]
3.9 7.815.523.334.9± 20%
Usl [cm s−1]
0.00 0.05 0.10 0.15 0.20 0.25 0.300.00
0.05
0.10
0.15
0.20
0.25
0.30
INTw
[m]
INT
w,K
S [m]
3443536576± 20%
Usg
[m s−1]
0.00 0.05 0.10 0.15 0.20 0.25 0.300.00
0.05
0.10
0.15
0.20
0.25
0.30
INTw
[m]
INT
w,K
S [m]
3.9 7.815.523.334.9± 20%
Usl [cm s−1]
Figure 5-6. Wave correlation performance. Series of constant Usg. (Right) Series of similar Usl.(Top) Lwave,KS . (Bottom) INTw,KS .
84

CHAPTER 6GLOBAL MODEL APPLICATION
The global model of Schubring and Shedd [1] (described in Chapter 2) has been modified
based on the results of Chapters 3 and 5. The optimization of the model proceeds by first
updating the film behavior correlations developed in the current work. The second step is
determining which parameters in the model (empirical and physical) can be adjusted to improve
agreement with data and to more accurately reflect the physics of annular flow.
The metrics of optimization for this work are the errors between correlated parameters
and measured outputs, which vary depending on the measurement test section. For the FEP
test section (used for PLIF film measurement), average film thickness (δ), base film thickness
(δbase), and wave height (δwave) data are available. For the quartz test section, pressure gradient
(dP/dz) and disturbance wave velocity (vwave) data are available. The current model results are
also compared qualitatively to the results of the original model, presented in the dissertation of
Schubring [58].
6.1 Re-Correlated Film Behavior
The updated PLIF measurement technique in Chapter 3 and the updated vertical wave length
measurement technique in Chapter 5 have resulted in changes to film behavior approximations
relevant to the Schubring and Shedd model. The specific contributions of these adjustments to the
global model are described by test section.
6.1.1 PLIF Observations (FEP Test Section)
The Schubring and Shedd model relies on observations of roughness in the base zone,
roughness in the wave zone, and an approximation of wave-to-base film height ratio. The
following observations have been made in the current work that update those observations in the
model:
Base Film Roughness. The base film roughness is calculated in the current work as twice
standard deviation of base film data (same as the original work) and is used two ways in the
model:
85

1. In the roughness friction factor from Hurlburt et al. , shown in Equation 2–16.
2. To approximate the fraction of base film that travels with a linear profile (linear fraction,LFbase).
The original observation agrees well with the current work, demonstrating a constant relative
roughness of 0.6 and a LFbase of 0.7.
Wave Height Roughness. The wave roughness is calculated as the standard deviation of
wave data and is applied in the roughness friction factor shown in Equation 2–34. The roughness
in the wave zone has been observed in the current work as 60% of δwave (an increase from the
original observation of 40%).
Wave-to-Base Ratio. The original work estimated mean wave height as 2 times the mean
base height, which did not explain some low liquid flow behaviors. The current work shows that
the ratio is actually a function of gas and liquid flow rate. An empirical correlation was developed
to express this ratio as a function of flow quality (Equation 3–7), shown again here:
δwaveδbase
= 1.86x−0.18 (6–1)
6.1.2 Vertical Wave Observations
The updated wave length (Lwave) measurement code developed in Chapter 5 resulted in
different observations of wave length and wave intermittency (INTw) than the original work.
Wave Length Observations. The wave length distributions in the current work show
generally shorter values for Lwave than previously observed. The correlation for Lwave developed
by Schubring [19] (Equation 2–12) has been re-optimized to fit the new measurements:
Lwave,KS = 0.43D
x0.63(6–2)
Wave Intermittency Observations. INTw is closely linked to Lwave, and therefore
showed similar departures from the original model. The correlation for INTw developed by
Schubring [19] (Equation 2–51) has been re-optimized to fit the new measurements:
INTw,KS = 0.07 +Rel
49000(6–3)
86

6.2 Model Adjustments
Some parameters in the Schubring and Shedd model are purely empirical. The goal of a
global model is to describe annular flow from physical principles. The calculation of wave shear
from sharp base-wave transitions, τi,wave,trans, is one violation of this goal by employing a purely
empirical factor of 2. This parameter has been removed, effectively lowering the contribution of
transition shear:
τi,wave,trans =ρcoreUg,trans
2(δwave − δbase)
Lwave(6–4)
The base and wave zone sub-models both use the rough tube friction factor suggested by
Hurlburt et al. [57] and employ the empirical constants cB,base and cB,wave. These constants are
observed in the equations as the subjects of a natural logarithm, so by setting them to 1.0 in the
current model they are effectively eliminated:
Cf,i,base = 0.582
[− ln εbase
(εbase − 1)2 + 1.05 +1
2
εbase + 1
εbase − 1
]−2
(6–5)
Cf,i,wave = 0.582
[− ln εwave
(εwave − 1)2 + 1.05 +1
2
εwave + 1
εwave − 1
]−2
(6–6)
The prediction of film thickness (both zones) and velocity is very sensitive to the friction
correlation, including the empirical enhancer, φRR. The equation for φRR has been adjusted from
its original form (Equation 2–15) to the following:
φRR = 2.18x−0.1 (6–7)
The original model observed a poor correlation of wave velocity outputs for series of
constant liquid flow, which increased too quickly with increasing gas flow rate. This can be
attributed to an over-prediction of wave velocity by the universal velocity profile. To remedy this,
the relative roughness of the wave zone is used to predict the fraction of the wave that travels
with the prescribed profile (termed the wave varying fraction, V Fwave) creating the following
87

expression for wave velocity:
U+l,i,wave = 5.5 + 2.5 ln
((1 − V Fwave)δ
+wave
)(6–8)
Ul,i,wave = U+l,i,waveu
?wave (6–9)
V Fwave = 0.3 (6–10)
This assumes that the upper portion of the wave (rough fraction) does not increase the wave
velocity (well-mixed flow). This is in agreement with the preliminary results of PLIF interface
tracking in Chapter 4, which indicates a consistent over-pridiction of wave velocity by the UVP
as a function of wave height.
6.3 Comparison to Vertical Data (FEP Tube)
The original model was developed first with consideration of the vertical FEP tube flow
conditions, used primarily for the PLIF film thickness measurements. The separation between
base and wave zones has been performed using the INTw values from disturbance wave
visualization. Average values for δ, δbase, and δwave are available for each flow condition from
PLIF results and are compared to the model outputs for error estimation.
Table 6-1 shows the accuracy of the predictions for these three results for PLIF flows
investigated with Qg,nom of 1600 L min−1 and below. Flow 189F was imaged twice; both
comparisons are included in the results.
Table 6-1. Performance of present global model for vertical FEP film thickness data.Correlated Parameter Mean Error [%] MAE [%] RMS [%]δ -0.10 8.70 11.11δbase 0.17 8.93 11.49δwave 0.42 9.82 14.31
Figure 6-1 shows the predicted δ, δbase, and δwave with series of liquid flow rate, along with
the performance of the model for film thickness. The current model performs very well for δ
and δbase, with slight inaccuracies in constant liquid series. This observation is consistent with
the original model and is most likely related to the same issues: experimental errors – notably
88

locating the tube wall – that vary with flow rates. The original model also performed very well
for PLIF film thickness data and showed similar trends.
6.4 Comparison to Vertical Data (Quartz Tube)
Flow conditions studied in the quartz tube allow for two direct comparisons of modeled
results and experimental data: pressure gradient and wave velocity. A total of 54 flow conditions
(Qg,nom of 1600 L min−1 and below) are available. The performance of the model with respect to
these two quantities is shown in Table 6-2. The modeled and experimental results are compared
for the quartz tube in Figure 6-3.
Table 6-2. Performance of present global model for vertical quartz tube data.Correlated Parameter Mean Error [%] MAE [%] RMS [%]dP/dz 0.45 17.42 23.22vwave 10.88 19.14 20.99
For pressure loss, the results show similar trends as from the original model. The over-
prediction of dP/dz with high gas and liquid flow appears to be a chronic issue with the model
and these high flow rates. The error estimates are good, and on par with empirical pressure loss
estimators. The wave velocity is also well-predicted in the quartz tube, although the range of
vwave with increasing gas flow rate is somewhat underestimated – as in the original model. The
change applied to the Ul,i,wave calculation shows an improvement for velocity estimates at high
gas flow rates.
The estimate of entrained fraction from the model, Emod, is shown in Figure 6-4 as a
function of gas and liquid flow rate. This estimate is evaluated qualitatively due to the lack of
entrainment data for comparison.
The values for Emod decrease across the board for the new model while maintaining the
same trends. The increases with gas and liquid flow rate are consistent with the original model,
wave videos, and entrainment literature. The increase with liquid flow rate and the sharp drop
towards an entrained fraction of 0 at low Usl are in agreement with the excess liquid concept.
89

0 20 40 60 80 1000
50
100
150
200
250
300
350
400
Usg
[m s−1]
δ mod
[µ
m]
6.312.721.129.633.8
Usl [cm s−1]
0 50 100 150 200 250 300 350 4000
50
100
150
200
250
300
350
400
δexp
[µ m]
δ mod
[µ
m]
6.312.721.129.633.8± 20%
Usl [cm s−1]
0 20 40 60 80 1000
50
100
150
200
250
300
350
Usg
[m s−1]
δ base
,mod [
µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 50 100 150 200 250 300 3500
50
100
150
200
250
300
350
δbase,exp
[µ m]
δ base
,mod [
µ m
]
6.312.721.129.633.8± 20%
Usl [cm s−1]
0 20 40 60 80 1000
200
400
600
800
Usg
[m s−1]
δ wav
e,m
od [
µ m
]
6.312.721.129.633.8
Usl [cm s−1]
0 200 400 600 8000
200
400
600
800
δwave,exp
[µ m]
δ wav
e,m
od [
µ m
]
6.312.721.129.633.8± 20%
Usl [cm s−1]
Figure 6-1. Model results pertaining to film thickness for vertical FEP tube. (Left) Results forseries of Usl. (Right) Performance comparison. (Top) δ. (Middle) δbase. (Bottom)δwave.
90

0 20 40 60 80 1000
5
10
15
20
25
30
35
40
Usg
[m s−1]
τ i,mod
,bas
e (1
− IN
T w)
[Pa]
6.312.721.129.633.8
Usl [cm s−1]
0 5 10 15 20 25 30 35 400
5
10
15
20
25
30
35
40
Usl [cm s−1]
τ i,mod
,bas
e (1
− IN
T w)
[Pa]
3646576880
Usg
[m s−1]
0 20 40 60 80 1000
5
10
15
20
25
30
35
40
Usg
[m s−1]
τ i,mod
,wav
e,ro
ugh IN
Tw
[Pa]
6.312.721.129.633.8
Usl [cm s−1]
0 5 10 15 20 25 30 35 400
5
10
15
20
25
30
35
40
Usl [cm s−1]
τ i,mod
,wav
e,ro
ugh IN
Tw
[Pa]
3646576880
Usg
[m s−1]
0 20 40 60 80 1000
5
10
15
20
25
30
35
40
Usg
[m s−1]
τ i,mod
,wav
e,tr
ans IN
Tw
[Pa]
6.312.721.129.633.8
Usl [cm s−1]
0 5 10 15 20 25 30 35 400
5
10
15
20
25
30
35
40
Usl [cm s−1]
τ i,mod
,wav
e,tr
ans IN
Tw
[Pa]
3646576880
Usg
[m s−1]
Figure 6-2. Components of τi from model for vertical FEP tube. (Left) By Usl. (Right) By Usg.(Top) Base film roughness, τi,base (1 − INTw). (Middle) Wave roughness,τi,wave,roughINTw. (Bottom) Wave drag, τi,wave,transINTw.
91

0 20 40 60 80 1000
5
10
15
20
25
30
35
Usg
[m s−1]
−dP
/dz m
od [k
Pa
m−1 ]
3.9 7.815.523.334.9
Usl [cm s−1]
0 5 10 15 20 25 30 35 400
5
10
15
20
25
30
35
Usl [cm s−1]
−dP
/dz m
od [k
Pa
m−1 ]
3443536576
Usg
[m s−1]
0 5 10 15 20 25 30 350
5
10
15
20
25
30
35
−dP/dzexp
[kPa m−1]
−dP
/dz m
od [k
Pa
m−1 ]
3.9 7.815.523.334.9± 20%
Usl [cm s−1]
0 5 10 15 20 25 30 350
5
10
15
20
25
30
35
−dP/dzexp
[kPa m−1]
−dP
/dz m
od [k
Pa
m−1 ]
3443536576± 20%
Usg
[m s−1]
0 1 2 3 4 5 6 7 80
1
2
3
4
5
6
7
8
vwave,Quartz
[m s−1]
Ul,i
,mod
,wav
e [m s
−1 ]
3.9 7.815.523.334.9± 20%
Usl [cm s−1]
0 1 2 3 4 5 6 7 80
1
2
3
4
5
6
7
8
vwave,Quartz
[m s−1]
Ul,i
,mod
,wav
e [m s
−1 ]
3443536576± 20%
Usg
[m s−1]
Figure 6-3. Performance of model in vertical quartz tube. (Left) By Usl. (Right) By Usg. (Top)dP/dx predictions. (Middle) dP/dx comparisons. (Bottom) vwave comparisons.
92

0 20 40 60 80 1000.0
0.2
0.4
0.6
0.8
1.0
Usg
[m s−1]
Em
od [−
]
3.9 7.815.523.334.9
Usl [cm s−1]
0 5 10 15 20 25 30 35 400.0
0.2
0.4
0.6
0.8
1.0
Usl [cm s−1]
Em
od [−
]
3443536576U
sg [m s−1]
Figure 6-4. Modeled entrained fraction, Emod, in vertical quartz tube. (Left) By Usl. (Right) ByUsg.
93

CHAPTER 7CONCLUSIONS
The current effort on two-phase modeling is justified by the numerous applications to
industrial heat-exchange equipment, notably in nuclear (BWR and PWR) systems. The annular
regime exists through large range of flow rates and is found in the core of a BWR, the steam
generator of a PWR, and in several postulated accident scenarios (including CHF in a BWR).
Gas-liquid annular flow is characterized by a core of fast-moving gas with entrained
liquid droplets, surrounded by a thin film of liquid, complicated by the presence of disturbance
waves and entrained gas bubbles. The complex features of annular flow are intricately related,
producing fluctuations in pressure loss and heat transfer, which are of particular interest in
industrial applications.
Many features of annular flow have been studied by previous researchers. Several features,
including film thickness distributions, disturbance wave distributions, and film velocity profiles
are integral to the flow mechanics and modeling efforts. Chapter 2 outlines several of these
efforts, culminating with the global modeling efforts of Schubring and Shedd [1]. The goal of the
Schubring and Shedd [1] model is to characterize annular flow through quantitative visualization
of individual flow features.
The conclusions for each chapter in the current work are presented, followed by a brief
summary/conclusion of the total effort and suggestions for future work.
7.1 PLIF Conclusions
The planar laser induced fluorescence (PLIF) annular film measurement technique of
Schubring et al. [43, 44] has been modified in Chapter 3. Many of the figures used to present the
original data have been duplicated and shown for comparison.
The results of the new algorithm have been compared visually to the previous and have
demonstrated more accurate results for edge location. The problems with detecting bubbles in
the interface have been limited, while the measurement of larger, more erratic waves has been
94

improved. An accurate GUI method of locating and eliminating poorly processed images has
been added.
The new algorithm has been compared quantitatively to the previous (by use of the kc
method), demonstrating differences in film thickness distribution. A new correlation has
been presented for film thickness relative roughness as a function of flow quality. A large
impact is also seen on wave height distributions and average wave values, which show a greater
dependency on gas flow rate. Relative roughness for the wave zone is now estimated as 0.3,
based on the interpretation of roughness as standard deviation. This measurement has a direct
impact on the Schubring and Shedd [1] model for predicting friction in the wave zone.
Very little impact on base film thickness distributions or trends is seen. The original code
did not show any problems with base film measurement; the code modifications were directed at
thicker, more erratic sections of the film. The wave-to-base ratio has been affected due to larger
wave measurements, with a correlation presented to predict this behavior as a function of flow
quality. The relative increase in wave height will increase the contribution of the wave zone shear.
The kc method for separating base film from waves, developed by Rodrıguez [21], was
compared to base-wave separations using INTw inputs. The INTw results were comparable
in magnitude, but showed higher average film thickness values for base and wave and stronger
dependence of gas flow rate.
7.2 PLIF Image Pair Conclusions
A MATLAB programming scheme was developed to accept time-elapsed PLIF image
pairs of annular flow and estimate the velocity of the gas-liquid interface (Chapter 4). These
measurements have been used to study the non-dimensional interfacial velocity, u+i , as a function
of wall units, y+. There are still several aspects of this study that require future effort, which may
be justified by the current work. Some issues that need to be addressed include:
PLIF Image Quality. Achieving cross-correlation with a success rate necessary for this
study requires extremely accurate liquid edge measurements. Many of the issues with poorly
95

processed images and bad cross-correlations stem from blurry PLIF images. A vigorous outlier-
removal process is employed to compensate for these problems in the current data, which may
skew the results. More specifically, base film sections are difficult to track due to the lack of
features of base film. Increased image quality would allow more accurate processing and better
overall velocity measurements.
Function Development. Neither the UVP or the linear/viscous approximation show good
agreement with the u+i measurements for individual flow rates. A better universal function for
interfacial velocity needs to be developed with respect to distance from the channel wall. It
has been demonstrated that such a function does exist – albeit weakly – and that superficial
gas velocity has little effect. The use of the van Driest model has not been proven significantly
accurate as a universal approximation of u+i , especially considering the increased empiricism and
computation required. The UVP is also an innaccurate approximation, but is relatively easy to
apply.
The PLIF image pairs have been divided into base and wave zones using intermittency data
from Chapter 5. The two zones have, in some flow conditions, shown different velocity behavior.
The wave zone shows a much wider range of interfacial velocities and film thicknesses. It may
be useful in future efforts to correlate the data in two zones to compensate for the difference in
behavior.
7.3 Vertical Wave Conclusions
The high-speed video processing code for wave length measurement (Lwave) developed
by Schubring et al. [19] has been modified to accommodate asymmetric disturbance waves by
splitting each image into multiple sections (Chapter 5). The two methods, single- and multi-
section, have been compared visually and quantitatively to assess the impact of asymmetry on
Lwave estimation.
The multi-section method produces more accurate wave length measurements for individual
waves and generally shorter estimates for individual and average Lwave values. The wave length
96

trends also appear as smoother functions of gas and liquid flow rates. The wave intermittency
(INTw), calculated as a function of Lwave, shows similar changes.
The assumption of disturbance wave symmetry has been key in the definition of INTw: the
fraction of time that disturbance waves are present at an axial location. The lack of symmetry
implies that wave intermittency is applicable to a location on the liquid film.
7.4 Global Model Conclusions
Several limitations to the original model have been addressed in the current work through
updated measurement techniques and re-correlation of individual parameters (Chapter 6). The
determination of velocity in the base film – using relative roughness to identify a linear fraction
(LFbase) – has been strengthened by an improved agreement with the new measurements.
Performance of the model has been improved for low-liquid flows through the correlation of
wave-to-base ratio, previously assumed constant.
Several limitations of the model still exist in the friction factor correlations and assumed
velocity profiles. The reliance on the universal velocity profile for estimates in the wave zone
has not been verified. In contrast, the current work on interfacial tracking (Chapter 4) shows
preliminary results that question such an assumption. The inclusion of a well-mixed layer on
the wave zone has mitigated some over-prediction in wave velocity, but it is more likely that the
universal velocity profile not suited for Ul,i,wave prediction.
The empirical factor of 2 in Equation 2–43 (transition effect) has been removed and
continues to produce accurate results. A reliance on the universal velocity profile still exists
through the Ui,wave,trans term, which may require future adjustment. A predominant form of
empiricism is the use of sample standard deviation as an estimation of roughness, used in several
calculations of velocity and shear.
The use of the Hurlburt et al. [57] friction factors requires an empirical assignment of the
values for cB. The remainder of the model adjustment has been performed by tweaking φRR, a
purely empirical fit. The model could be improved with a more physical determination of friction
factors, perhaps eliminating the need for such an adjustment parameter.
97

In spite of the continued limitations, the model produces a number of accurate predictions
with reduced empiricism while requiring no information beyond flow rates, tube diameter, and
fluid properties. All predictions are accurate to within 20% (MAE); many are significantly
superior to this. The predictions for film height and wave velocity are accurate to within 10%
and 15% (MAE, respectively), including any differences that may be related to the experimental
facility (FEP vs. quartz tubing). The accuracy of the prediction for vwave is notable, especially
given the lack of direct wave zone velocity profile information.
7.5 Overall Conclusions
The culmination of the current work is the re-correlation of the Schubring and Shedd global
model [1] in Chapter 6. Much of the current effort has been spent updating measurement tech-
niques and data sets for the better understanding of annular flow behavior. The real verification
for these individual behavioral observations relies on their interrelationships and the improved
prediction of annular flow parameters. The Schubring and Shedd model has been used as a metric
for these improvements, showing similar – often improved – observational agreements in output
parameters with reduced empiricism.
One theme of the current work is the application of quantitative visualization for measure-
ments in annular flow. The PLIF measurements have been shown to produce visually accurate
film thickness results (base film and wave) without intrusive instrumentation. The vertical wave
video has demonstrated similar achievements, with the addition of temporal resolution.
One limiting factor to both techniques – and quantitative visualization in general – is the
reliance of measurements on unique data regression code. The current work shows how some
observations can vary based on measurement techniques after the raw data collection. Several
original observations, including base film roughness estimates, have been revised by the new
code. However, the adjustment of wave-to-base ratio and wave intermittency trends has a notable
impact on global model outputs. The objective development of data reduction code, and the
knowledge of all limitations, is key to the accuracy of a measurement.
98

The effort spent on liquid interface tracking (Chapter 4) has not been applied to the global
model in Chapter 6. That effort could be useful to the understanding of interfacial velocity and
shear. The current limitations to interfacial tracking are primarily dependent on image quality.
7.6 Recommended Future Work
The current work has shown improvements in the use of PLIF and high-speed video data
for annular flow, along with improved global modeling. However, several limitation still exist
in pursuit of the overall goal – a completely closed model for industrial annular flow. The
achievement of that goal is well beyond the scope of the current work. The following areas
require further study to achieve this goal.
Time-elapsed PLIF. These data would facilitate the analysis of momentum transfer at
the gas-liquid interface and a better understanding of the film roughness concept. The main
limitation to this measurement is the lack of contrast in PLIF image pairs, limiting the accuracy
of liquid edge identification. A new, comprehensive set of time-elapsed PLIF images is required
for future analysis. The future work for developing interfacial velocity as a function of film
height has also been discussed in Section 7.2.
In addition to the gas-liquid interface, bubbles within the liquid core are often visible with
a possibility of tracking. The reliable identification of bubbles is a much more difficult task, as
bubbles show up through a range of intensities and contrasts. The three-dimensional shape and
location of bubbles also pose problems, as the identification of bubbles outside the laser plane
could result in inaccurate measurements.
Entrainment. Liquid entrainment in the gas core is particularly difficult to describe.
The further development of global models requires a better understanding of entrained liquid
behavior and its complex dependence on gas and liquid velocities. The involvement of complex
entrainment scenarios into the global model may reduce the empiricism in some of these
behaviors.
For future data acquisition, the location and tracking of entrained liquid in annular flow
would be invasive for almost any physical measurement technique. The use of multiple cameras
99

with three-dimensional reconstruction, or other multi-dimensional visualization techniques, may
be applicable.
Property Effects. This work focused on behaviors of an air-water system, rarely seen in
industrial applications. An accurate property-dependent annular flow model is ideal, requiring
multiple fluid pairs and a wide range of fluid properties for comparison. This would improve
the relation of laboratory work to the realms of refrigerants, steam-water systems, and other
condensible gases prevalent in industrial systems. On a smaller scale, more attention could be
focused on correlating parameters to fluid properties such as density, viscosity, or surface tension.
Heat Transfer. While the outputs of the current work have a direct effect on heat transfer
modeling, the coupling of convective heat transfer in the liquid film could enhance the model’s
industrial application. A better understanding of turbulence-enhanced convective heat transfer
may also provide insight to thin-film mechanics.
The scope of the current work has been limited to the raw data available. Advancement of
the Schubring and Shedd [1] global model to a closed, physical engineering design code requires
a great addition of thoughtful experimental work, supplemented with data reduction efforts on a
similar scale.
100

APPENDIX APLIF DATA
Table A-1. Vertical FEP tube data.Flow Qg,nom Ql Usg Usl Total Rej
[L min−1] [L min−1] [m s−1] [cm s−1] [images] [images]102F 800 1.5 35.7 6.3 400 4105F 800 3.0 35.8 12.7 400 5109F 800 5.0 36.3 21.1 400 8113F 800 7.0 37.2 29.6 400 16115F 800 8.0 37.3 33.8 400 18121F 1000 1.5 45.0 6.3 400 5124F 1000 3.0 45.4 12.7 400 3128F 1000 5.0 46.2 21.1 400 6132F 1000 7.0 47.8 29.6 400 12134F 1000 8.0 47.9 33.8 400 13140F 1200 1.5 54.7 6.3 400 1143F 1200 3.0 55.3 12.7 400 4147F 1200 5.0 56.5 21.1 400 2151F 1200 7.0 59.3 29.6 400 15153F 1200 8.0 59.4 33.8 400 5159F 1400 1.5 64.4 6.3 400 2162F 1400 3.0 65.2 12.7 400 4166F 1400 5.0 66.9 21.1 400 2170F 1400 7.0 72.1 29.6 400 17172F 1400 8.0 71.7 33.8 400 6178F 1600 1.5 75.0 6.3 400 1181F 1600 3.0 76.1 12.7 400 0185F 1600 5.0 78.0 21.1 400 3189Fa 1600 7.0 83.5 29.6 400 9189Fb 1600 7.0 83.5 29.6 400 16191F 1600 8.0 83.5 33.8 300 6
101

Table A-2. PLIF data using kc method.Flow δ s(δ) δbase s(δbase) δwave s(δwave)
[µm] [µm] [µm] [µm] [µm] [µm]102F 223.9 116.0 183.8 57.0 412.5 135.5105F 260.8 157.2 199.9 62.6 491.8 190.1109F 294.3 165.4 222.3 72.0 532.9 163.5113F 337.8 205.3 242.8 74.7 608.5 217.9115F 342.7 196.7 250.6 78.6 602.1 197.7121F 187.2 78.0 164.8 47.1 332.7 82.4124F 187.8 107.5 150.5 44.2 357.6 142.2128F 239.7 143.8 177.9 54.4 439.6 160.1132F 262.6 160.8 190.7 55.4 469.1 183.9134F 267.6 148.4 202.0 61.2 473.9 152.8140F 145.0 57.7 127.6 33.2 247.7 64.0143F 153.1 81.5 122.3 35.9 277.7 94.4147F 174.6 94.6 133.7 37.4 304.6 103.4151F 201.5 109.2 151.9 43.1 347.5 113.7153F 206.9 116.0 151.6 41.8 354.9 121.6159F 116.5 43.2 102.0 24.9 190.0 41.4162F 116.6 47.5 100.3 26.1 194.5 49.0166F 146.1 78.2 111.5 31.2 252.9 82.9170F 171.7 83.3 136.1 36.1 293.5 84.2172F 167.9 91.4 130.8 41.6 307.7 92.4178F 91.6 31.2 81.3 18.1 144.9 30.6181F 91.1 33.1 79.4 18.6 145.2 31.6185F 100.0 52.4 78.3 20.9 173.3 59.7189Fa 158.1 73.9 123.7 26.5 250.4 80.9189Fb 152.4 76.5 117.3 34.7 260.8 68.2191F 135.6 65.8 105.8 28.2 231.3 60.4
102

Table A-3. PLIF data using INTw method.Flow δ s(δ) δbase s(δbase) δwave s(δwave)
[µm] [µm] [µm] [µm] [µm] [µm]102F 223.9 116.0 197.1 68.4 496.0 146.3105F 260.8 157.2 219.7 80.4 623.1 198.5109F 294.3 165.4 237.0 84.1 595.6 161.2113F 337.8 205.3 258.4 87.7 677.7 217.7115F 342.7 196.7 261.2 86.9 641.7 198.1121F 187.2 78.0 165.6 47.6 336.7 82.8124F 187.8 107.5 160.1 52.6 432.0 151.2128F 239.7 143.8 193.0 67.3 522.2 159.5132F 262.6 160.8 201.1 63.9 518.2 188.0134F 267.6 148.4 207.2 65.2 494.9 153.2140F 145.0 57.7 131.8 36.8 270.9 68.5143F 153.1 81.5 130.9 43.3 328.4 98.8147F 174.6 94.6 145.0 47.1 359.0 106.5151F 201.5 109.2 162.0 51.3 390.6 114.5153F 206.9 116.0 159.9 48.6 388.6 122.0159F 116.5 43.2 106.1 28.2 208.8 42.9162F 116.6 47.5 104.3 29.4 212.6 52.1166F 146.1 78.2 122.4 40.5 306.2 83.0170F 171.7 83.3 144.1 42.7 330.5 82.6172F 167.9 91.4 132.7 43.1 316.3 92.3178F 91.6 31.2 83.2 19.5 153.0 31.5181F 91.1 33.1 81.7 20.4 154.3 32.6185F 100.0 52.4 83.7 25.5 201.0 62.3189Fa 158.1 73.9 133.2 34.4 292.7 84.0189Fb 152.4 76.5 126.3 42.2 293.0 65.8191F 135.6 65.8 112.5 34.0 260.0 55.6
103

APPENDIX BPLIF HISTOGRAMS: BASE AND WAVE
0 500 1000 1500 20000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 500 1000 1500 20000
2
4
6
8
10
12x 10
4
δ [µm]
n pt [−
]
0 500 1000 15000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
2
4
6
8
10
12x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 500 1000 15000
2
4
6
8
10
12
14x 10
4
δ [µm]
n pt [−
]
Figure B-1. Histograms of film thickness, base and wave. Flow conditions: (Top Left) 102F. (TopRight) 105F. (Middle Left) 113F. (Middle Right) 115F. (Bottom Left) 121F. (BottomRight) 124F.
104

0 200 400 600 8000
2
4
6
8
10
12x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
Figure B-2. Histograms of film thickness, base and wave. Flow conditions: (Top Left) 132F. (TopRight) 134F. (Middle Left) 159F. (Middle Right) 162F. (Bottom Left) 170F. (BottomRight) 172F.
105

0 200 400 600 8000
2
4
6
8
10
12x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
2
4
6
8
10x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
2
4
6
8
10
12x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
1
2
3
4
5
6
7x 10
4
δ [µm]
n pt [−
]
Figure B-3. Histograms of film thickness, base and wave. Flow conditions: (Top Left) 178F. (TopRight) 181F. (Bottom Left) 189Fa. (Bottom Right) 191F.
106

APPENDIX CPLIF HISTOGRAMS: STANDARD DEVIATION MULTIPLIER METHOD
0 100 200 300 4000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 1500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 1500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure C-1. Histograms of base film thickness using kc method. Flow conditions: (Top Left)102F. (Top Right) 121F. (Middle Left) 140F. (Middle Right) 159F. (Bottom) 178F.
107

0 100 200 300 4000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 1500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure C-2. Histograms of base film thickness using kc method. Flow conditions: (Top Left)105F. (Top Right) 124F. (Middle Left) 143F. (Middle Right) 162F. (Bottom) 181F.
108

0 50 100 150 200 250 300 3500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 1500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure C-3. Histograms of base film thickness using kc method. Flow conditions: (Top Left)113F. (Top Right) 132F. (Middle Left) 151F. (Middle Right) 170F. (Bottom) 189aF.
109

0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 1500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 2000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
Figure C-4. Histograms of base film thickness using kc method. Flow conditions: (Top Left)115F. (Top Right) 134F. (Middle Left) 153F. (Middle Right) 172F. (Bottom) 191F.
110

0 500 1000 1500 20000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure C-5. Histograms of wave height using kc method. Flow conditions: (Top Left) 102F. (TopRight) 121F. (Middle Left) 140F. (Middle Right) 159F. (Bottom) 178F.
111

0 500 1000 1500 20000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
δ [µm]
n pt [−
]
0 500 1000 15000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure C-6. Histograms of wave height using kc method. Flow conditions: (Top Left) 105F. (TopRight) 124F. (Middle Left) 143F. (Middle Right) 162F. (Bottom) 181F.
112

0 500 1000 15000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
δ [µm]
n pt [−
]
Figure C-7. Histograms of wave height using kc method. Flow conditions: (Top Left) 113F. (TopRight) 132F. (Middle Left) 151F. (Middle Right) 170F. (Bottom) 189aF.
113

0 200 400 600 800 1000 12000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
Figure C-8. Histograms of wave height using kc method. Flow conditions: (Top Left) 115F. (TopRight) 134F. (Middle Left) 153F. (Middle Right) 172F. (Bottom) 191F.
114

APPENDIX DPLIF HISTOGRAMS: INTERMITTENCY METHOD
0 100 200 300 4000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 100 200 300 4000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
δ [µm]
n pt [−
]
0 100 200 300 4000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 100 200 300 4000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 100 200 300 4000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure D-1. Histograms of base film thickness using INTw method. Flow conditions: (Top Left)102F. (Top Right) 105F. (Middle Left) 109F. (Middle Right) 113F. (Bottom) 115F.
115

0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 250 300 3500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 250 300 3500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 250 300 3500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure D-2. Histograms of base film thickness using INTw method. Flow conditions: (Top Left)121F. (Top Right) 124F. (Middle Left) 128F. (Middle Right) 132F. (Bottom) 134F.
116

0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 250 3000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure D-3. Histograms of base film thickness using INTw method. Flow conditions: (Top Left)140F. (Top Right) 143F. (Middle Left) 147F. (Middle Right) 151F. (Bottom) 153F.
117

0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 2000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure D-4. Histograms of base film thickness using INTw method. Flow conditions: (Top Left)159F. (Top Right) 162F. (Middle Left) 166F. (Middle Right) 170F. (Bottom) 172F.
118

0 50 100 1500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 1500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 1500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 200 2500
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 50 100 150 2000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
Figure D-5. Histograms of base film thickness using INTw method. Flow conditions: (Top Left)178F. (Top Right) 181F. (Middle Left) 185F. (Middle Right) 189F. (Bottom) 189Fa.
119

0 500 1000 1500 20000
2000
4000
6000
8000
10000
12000
δ [µm]
n pt [−
]
0 500 1000 1500 20000
2000
4000
6000
8000
10000
12000
δ [µm]
n pt [−
]
0 500 1000 1500 20000
5000
10000
15000
δ [µm]
n pt [−
]
0 500 1000 1500 20000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 500 1000 1500 20000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure D-6. Histograms of wave height using INTw method. Flow conditions: (Top Left) 102F.(Top Right) 105F. (Middle Left) 109F. (Middle Right) 113F. (Bottom) 115F.
120

0 500 1000 15000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
0 500 1000 15000
2000
4000
6000
8000
10000
12000
14000
δ [µm]
n pt [−
]
0 500 1000 15000
2000
4000
6000
8000
10000
12000
14000
δ [µm]
n pt [−
]
0 500 1000 15000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 500 1000 15000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure D-7. Histograms of wave height using INTw method. Flow conditions: (Top Left) 121F.(Top Right) 124F. (Middle Left) 128F. (Middle Right) 132F. (Bottom) 134F.
121

0 200 400 600 800 1000 12000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
2000
4000
6000
8000
10000
12000
14000
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
0 200 400 600 800 1000 12000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure D-8. Histograms of wave height using INTw method. Flow conditions: (Top Left) 140F.(Top Right) 143F. (Middle Left) 147F. (Middle Right) 151F. (Bottom) 153F.
122

0 200 400 600 800 10000
2000
4000
6000
8000
10000
12000
14000
δ [µm]
n pt [−
]
0 200 400 600 800 10000
5000
10000
15000
δ [µm]
n pt [−
]
0 200 400 600 800 10000
2000
4000
6000
8000
10000
12000
δ [µm]
n pt [−
]
0 200 400 600 800 10000
2000
4000
6000
8000
10000
12000
14000
δ [µm]
n pt [−
]
0 200 400 600 800 10000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
Figure D-9. Histograms of wave height using INTw method. Flow conditions: (Top Left) 159F.(Top Right) 162F. (Middle Left) 166F. (Middle Right) 170F. (Bottom) 172F.
123

0 200 400 600 8000
0.5
1
1.5
2
2.5
3x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
5000
10000
15000
δ [µm]
n pt [−
]
0 200 400 600 8000
0.5
1
1.5
2x 10
4
δ [µm]
n pt [−
]
0 200 400 600 8000
2000
4000
6000
8000
10000
12000
δ [µm]
n pt [−
]
Figure D-10. Histograms of wave height using INTw method. Flow conditions: (Top Left) 178F.(Top Right) 181F. (Middle Left) 185F. (Middle Right) 189F. (Bottom) 189Fa.
124

APPENDIX EPLIF IMAGE PAIR DATA
Table E-1. Flow conditions for PLIF image pair sets.Flow Qg,nom Ql ∆t δ+ u+
i
L min−1 L min−1 ms [-] [-]102F 800 1.5 0.21 25.52 8.53105F 800 3.0 0.17 26.88 8.88109F 800 5.0 0.14 33.56 8.78113F 800 7.0 0.12 41.39 9.54120F 1000 1.0 0.19 19.08 6.86122F 1000 2.0 0.17 19.91 9.15126F 1000 4.0 0.14 25.91 10.4130F 1000 6.0 0.12 32.95 10.5134F 1000 8.0 0.10 43.53 10.16140F 1200 1.5 0.15 16.87 7.28143F 1200 3.0 0.13 20.83 7.42147F 1200 5.0 0.12 21.61 10.5151F 1200 7.0 0.10 32.96 10.56158F 1400 1.0 0.15 14.63 8.23160F 1400 2.0 0.13 14.81 7.27164F 1400 4.0 0.12 19.65 10.3168F 1400 6.0 0.11 24.22 9.9172F 1400 8.0 0.09 34.07 11.62178F 1600 1.5 0.13 14.23 8.35181F 1600 3.0 0.11 15.85 8.05185F 1600 5.0 0.10 21.74 9.51189F 1600 7.0 0.10 25.47 12.05
125

APPENDIX FMEAN INTERFACIAL VELOCITY PLOTS
0 5 10 15 20 25 30 350
10
20
30
40
50
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 5 10 15 20 25 30 350
10
20
30
40
50
60
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 40 500
10
20
30
40
50
60
70
80
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 400
20
40
60
80
100
120
140
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 40 500
20
40
60
80
100
120
140
160
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
Figure F-1. PLIF interfacial velocity data plots for flow conditions (top left) 120F, (top right)122F, (middle left) 126F, (middle right) 130F, (bottom) 134F.
126

0 10 20 30 40 500
10
20
30
40
50
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 400
10
20
30
40
50
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 400
10
20
30
40
50
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 5 10 15 20 25 30 350
10
20
30
40
50
60
70
80
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 400
20
40
60
80
100
120
140
160
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
Figure F-2. PLIF interfacial velocity data plots for flow conditions (top left) 158F, (top right)160F, (middle left) 164F, (middle right) 168F, (bottom) 172F.
127

0 5 10 15 20 25 30 350
10
20
30
40
50
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 40 500
5
10
15
20
25
30
35
40
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 40 500
20
40
60
80
100
120
140
160
180
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
0 10 20 30 40 500
20
40
60
80
100
120
140
160
180
Ui+ [−]
δ + [−
]
Ui+ Base
Ui+ Wave
UVP
Ui+ = y+
Figure F-3. PLIF interfacial velocity data plots for flow conditions (top left) 178F, (top right)181F, (bottom left) 185F, (bottom right) 189F.
128

APPENDIX GVERTICAL WAVE LENGTH DATA
Table G-1. Vertical quartz tube wave data (1).Flow Qg,nom Ql Usg Usl Lwave INTw
[L min−1] [L min−1] [m s−1] [cm s−1] [cm] [-]101Q 800 1.0 32.7 3.9 1.92 0.072102Q 800 1.5 32.8 5.8 2.14 0.090103Q 800 2.0 32.4 7.8 2.39 0.086105Q 800 3.0 33.0 11.6 2.74 0.104107Q 800 4.0 33.3 15.5 2.81 0.142109Q 800 5.0 33.6 19.4 3.27 0.163111Q 800 6.0 34.8 23.3 3.45 0.181113Q 800 7.0 34.5 27.1 3.78 0.195117Q 800 9.0 35.4 34.9 4.26 0.208119Q 800 10.0 35.7 38.8 4.97 0.226120Q 1000 1.0 41.4 3.9 1.75 0.073121Q 1000 1.5 41.5 5.8 2.27 0.119122Q 1000 2.0 41.2 7.8 2.20 0.086124Q 1000 3.0 41.9 11.6 2.38 0.107126Q 1000 4.0 42.3 15.5 2.51 0.130128Q 1000 5.0 42.7 19.4 2.77 0.145130Q 1000 6.0 44.8 23.3 2.89 0.174132Q 1000 7.0 44.4 27.1 3.27 0.195134Q 1000 8.0 44.7 31.0 3.71 0.214136Q 1000 9.0 45.5 34.9 3.74 0.222138Q 1000 10.0 45.8 38.8 4.19 0.231139Q 1200 1.0 50.4 3.9 1.79 0.086140Q 1200 1.5 50.5 5.8 2.00 0.097141Q 1200 2.0 50.3 7.8 2.12 0.092143Q 1200 3.0 51.1 11.6 2.29 0.121145Q 1200 4.0 51.7 15.5 2.16 0.124147Q 1200 5.0 52.3 19.4 2.30 0.138149Q 1200 6.0 55.7 23.3 2.66 0.157151Q 1200 7.0 55.3 27.1 2.90 0.177153Q 1200 8.0 55.5 31.0 3.17 0.205155Q 1200 9.0 56.5 34.9 3.48 0.224157Q 1200 10.0 56.6 38.8 3.78 0.242
129

Table G-2. Vertical quartz tube wave data (2).Flow Qg,nom Ql Usg Usl Lwave INTw
[L min−1] [L min−1] [m s−1] [cm s−1] [cm] [-]158Q 1400 1.0 59.6 3.9 1.67 0.122159Q 1400 1.5 59.5 5.8 1.81 0.108160Q 1400 2.0 59.7 7.8 1.86 0.103162Q 1400 3.0 60.4 11.6 1.83 0.121164Q 1400 4.0 61.1 15.5 1.60 0.128166Q 1400 5.0 62.1 19.4 1.51 0.121168Q 1400 6.0 67.2 23.3 1.86 0.139170Q 1400 7.0 67.2 27.1 2.17 0.149172Q 1400 8.0 67.1 31.0 2.69 0.190174Q 1400 9.0 75.7 34.9 2.95 0.217176Q 1400 10.0 76.7 38.8 3.27 0.235177Q 1600 1.0 69.6 3.9 1.19 0.131178Q 1600 1.5 69.5 5.8 1.32 0.123179Q 1600 2.0 69.8 7.8 1.37 0.115181Q 1600 3.0 70.7 11.6 1.42 0.123183Q 1600 4.0 71.4 15.5 1.32 0.129185Q 1600 5.0 72.5 19.4 1.27 0.132187Q 1600 6.0 77.7 23.3 1.54 0.152189Q 1600 7.0 77.9 27.1 1.42 0.140191Q 1600 8.0 78.3 31.0 1.77 0.153193Q 1600 9.0 88.6 34.9 2.40 0.182195Q 1600 10.0 90.5 38.8 2.69 0.226196Q 1800 1.0 80.3 3.9 0.83 0.136197Q 1800 1.5 80.3 5.8 0.90 0.127198Q 1800 2.0 80.5 7.8 0.92 0.119200Q 1800 3.0 81.5 11.6 1.04 0.119202Q 1800 4.0 82.5 15.5 1.13 0.132204Q 1800 5.0 83.3 19.4 1.16 0.132206Q 1800 6.0 88.6 23.3 1.27 0.152208Q 1800 7.0 88.9 27.1 1.30 0.172210Q 1800 8.0 89.6 31.0 1.48 0.158212Q 1800 9.0 101.5 34.9 1.61 0.164214Q 1800 10.0 105.0 38.8 2.38 0.200
130

APPENDIX HVERTICAL WAVE LENGTH EXAMPLE IMAGES
The following figures include example wave images for vertial annular flow for Qg,nom =
1200 L min−1 (approximately Usg = 53 m s−1) and are shown in order of increasing liquid flow
(Usl from 3.9 to 38.8 cm s−1).
Figure H-1. Vertical wave length example images for flow condition 139Q.
131

Figure H-2. Vertical wave length example images for flow condition 140Q.
Figure H-3. Vertical wave length example images for flow condition 141Q.
132

Figure H-4. Vertical wave length example images for flow condition 143Q.
Figure H-5. Vertical wave length example images for flow condition 145Q.
133

Figure H-6. Vertical wave length example images for flow condition 147Q.
Figure H-7. Vertical wave length example images for flow condition 149Q.
134

Figure H-8. Vertical wave length example images for flow condition 151Q.
Figure H-9. Vertical wave length example images for flow condition 153Q.
135

Figure H-10. Vertical wave length example images for flow condition 155Q.
Figure H-11. Vertical wave length example images for flow condition 157Q.
136

REFERENCES
[1] T. S. D. Schubring, “A model for pressure loss, film thickness, and entrained fraction forgas-liquid annular flow,” International Journal of Heat and Fluid Flow, p. Under review.
[2] W. M. Kays, M. E. Crawford, and B. Weigand, Convective Heat and Mass Transfer. NewYork, NY, USA: McGraw Hill, 4th ed., 2005.
[3] J. P. Holman, Viscous Fluid Flow. McGraw-Hill, 2002.
[4] P. B. Whalley, Boiling, Condensation and Gas-Liquid Flow. Oxford, UK: Clarendon Press,1987.
[5] G. F. Hewitt and N. S. Hall Taylor, Annular Two-Phase Flow. Oxford, UK: Pergamon Press,1970.
[6] G. F. Hewitt and D. N. Roberts, “Studies of two-phase flow patterns by simultaneous x-rayand flash photography,” AERE M-2159, 1969.
[7] N. J. Hawkes, C. Lawrence, and G. Hewitt, “Prediction of the transition from annularto wispy-annular flow using linear stability analysis of the gas-droplet core,” ChemicalEngineering Science, vol. 56, pp. 1925–1932, 2001.
[8] J. R. Thome, “Flow boiling in horizontal tubes: a critical assessment of current method-ologies,” in Two-Phase Flow Modelling and Experimentation 1995 (G. P. Celata and R. K.Shah, eds.), vol. 1, (Rome, Italy), pp. 41–52, Edizioni ETS, Pisa, Oct. 1995.
[9] J. R. Thome, “Boiling of new refrigerants: a state-of-the-art review,” International Journalof Refrigeration, vol. 19, no. 7, pp. 435–457, 1996.
[10] O. Baker, “Simultaneous flow of oil and gas,” Oil and Gas Journal, vol. 53, no. 12, pp. 185–190, 1954.
[11] Y. Taitel, D. Barnea, and A. E. Dukler, “Modeling flow pattern transitions for steady upwardgas-liquid flow in vertical tubes,” AIChE Journal, vol. 26, pp. 345–354, 1980.
[12] G. F. Hewitt, “Flow regimes,” in Handbook of Multiphase Systems (G. Hetsroni, ed.),pp. 2–3 – 2–43, New York: McGraw–Hill, 1982.
[13] K. Mishima and M. Ishii, “Flow regime transition criteria for upward two-phase flow invertical tubes,” International Journal of Heat and Mass Transfer, vol. 27, pp. 723–737,1984.
[14] T. Hibiki and M. Ishii, “One-dimensional drift-flux model and constitutive equations forrelative motion between phases in various two-phase flow regimes,” International Journalof Heat and Mass Transfer, vol. 46, no. 25, pp. 4935–4948, 2003.
[15] A. C. Fowler and P. E. Lisseter, “Flooding and flow reversal in annular two-phase flows,”SIAM Journal on Applied Mathematics, vol. 52, pp. 15–33, 1992.
137
[16] J. Ohta, F. Yamamoto, and M. Koukawa, “Visualization and image processing for a gas-liquid two-phase flow,” in Flow Visualization and Image Processing of Multiphase Systems(W. J. Yang, F. Yamamoto, and F. Mayinger, eds.), vol. 209 of The Proceedings of theASME Fluids Engineering Division, (Fukui-shi, Japan), pp. 65–72, The American Societyof Mechanical Engineers, Aug. 1995.
[17] K. S. Rezkallah and P. de Jong, “Measurements if actual gas velocity in two-phase flowusing high-speed video and image processing,” in Proceedings of the Fourth InternationalSymposium on Fluid Control, Measurement and Visualization, (Toulouse), 1994.
[18] K. S. Rezkallah and N. N. Clarke, “Void fraction measurements in gas-liquid flows usingimage processing,” in Flow Visualization and Image Processing of Multiphase Systems(W. J. Yang, F. Yamamoto, and F. Mayinger, eds.), vol. FED-Vol. 209 of The Proceedingsof the ASME Fluids Engineering Division, (Hilton Head, SC), pp. 31–35, The AmericanSociety of Mechanical Engineers, Aug. 1995.
[19] D. Schubring, T. A. Shedd, and E. T. Hurlburt, “Studying disturbance waves in verticalannular flow with high-speed video,” Submitted to the International Journal of MultiphaseFlow, 2009.
[20] R. Belt, J. V. Westende, H. Prasser, and L. Portela, “Time and spacially resolved measure-ments of interfacial waves in vertical annular flow,” IJMF, vol. 36, pp. 570–587, 2010.
[21] D. J. Rodrıguez, Characterization of bubble entrainment, interfacial roughness and thesliding bubble mechanism in horizontal annular flow. PhD thesis, University of Wisconsin-Madison, Madison, WI, USA, 2004.
[22] A. J. Smits and T. T. Lim, Flow Visualization: Techniques and Examples. Imperial CollegePress, 2000.
[23] D. Sinton, “Microscale flow visualization,” Microfluidics and Nanofluidics, vol. 1, no. 1,pp. 2–21, 2004.
[24] D. Compton and L. Eaton, “A high-resolution laser doppler anemometer for three-dimensional turbulent boundary layers,” Experiments in Fluids, vol. 22, pp. 111–117,1996.
[25] A. Tieu, M. Machenzie, and E. Li, “Measurements in microscopic flow with a solid-statelda,” Experiments in Fluids, vol. 19, pp. 293–294, 1995.
[26] R. J. Adrian, “Particle–imaging techniques for experimental fluid mechanics,” AnnualReview of Fluid Mechanics, vol. 23, pp. 261–304, 1991.
[27] R. D. Keane and R. J. Adrian, “Optimization of particle image velocimeters. Part i: Doublepulsed systems,” Measurement Science and Technology, vol. 1, pp. 1202–1215, 1990.
[28] R. D. Keane and R. J. Adrian, “Optimization of particle image velocimeters. Part ii:Multiple pulsed systems,” Measurement Science and Technology, vol. 2, pp. 963–974, 1991.
138

[29] K. Hinsch, “Particle image velocimetry,” in Speckle Metrology (R. Sirohi, ed.), (New York,NY), pp. 235–323, Marcel Dekker, 1993.
[30] Y. Marzouk and D. Hart, “Asymmetric autocorrelation function to resolve directionalambiguity in piv images,” Experiments in Fluids, vol. 25, pp. 401–408, 1998.
[31] R. D. Keane and R. J. Adrian, “Theory of cross-correlation analysis of piv images,” AppliedScientific Research, vol. 49, pp. 191–215, 1992.
[32] K. D. Hinsch, “Three-dimensional particle velocimetry,” Measurement Science andTechnology, vol. 6, pp. 742–753, 1994.
[33] J. G. Santiago, S. T. Wereley, C. D. Meinhart, D. J. Beebe, and R. J. Adrian, “A particleimage velocimetry system for microfluidics,” Experiments in Fluids, vol. 25, pp. 316–319,1998.
[34] Y. Hassan, “Multiphase bubbly flow visualization using particle image velocimetry,” Annalsof the New York Academy of Sciences, vol. 972, pp. 223–228, 2002.
[35] D. Schubring, R. E. Foster, and T. A. Shedd, “Two-zone PIV analysis of wavy and wavy-annular two-phase flow,” in Proceedings of ICONE16, 16th International Conference onNuclear Engineering, (Orlando, FL, USA), ASME, 2008. Paper ICONE16-48111.
[36] R. D. Keane, R. J. Adrian, and Y. Zhang, “Super-resolution particle imaging velocimetry,”Measurement Science and Technology, vol. 6, pp. 754–768, 1995.
[37] K. Takehara, R. Adrian, G. Etoh, and K. Christensen, “A kalman tracker for super-resolutionpiv,” Experiments in Fluids, pp. 34–41, 2000.
[38] R. K. Hanson, “Planar laser-induced flourescence imaging,” J. Quant. Spectrosc. Radiat.Transfer, vol. 40, pp. 343–362, 1988.
[39] G. Kychakoff, K. Knapp, R. D. Howe, and R. K. Hanson, “Flow visualization in combustiongases using nitric oxide flourescence,” AIAA Journal, vol. 20, pp. 153–154, 1984.
[40] R. K. Hanson, “Combustion diagnostics: Planar imaging techniques,” in Proceedings ofthe Twenty-First Symposium (International) on Combustion (P. Dagaut and V. Sick, eds.),(Munich), pp. 1677–1691, The Combustion Institute, 1986.
[41] I. van Cruyningen, A. Lozano, and R. K. Hanson, “Quantitative imaging of concentration byplanar laser-induced flourescence,” Experiments in Fluids, vol. 10, pp. 41–49, 1990.
[42] D. J. Rodrıguez and T. A. Shedd, “Cross-sectional imaging of the liquid film in horizontaltwo-phase annular flow,” in 2004 ASME Heat Transfer/Fluids Engineering SummerConference, (Charlotte, NC), 2004. Paper 56445.
[43] D. Schubring, A. C. Ashwood, T. A. Shedd, and E. T. Hurlburt, “Planar laser-inducedfluorescence (PLIF) measurements of liquid film thickness in annular flow. Part I: Methodsand data,” Submitted to the International Journal of Multiphase Flow, 2009.
139

[44] D. Schubring, T. A. Shedd, and E. T. Hurlburt, “Planar laser-induced fluorescence (PLIF)measurements of liquid film thickness in annular flow. Part II: Interpretation and modeling,”Submitted to the International Journal of Multiphase Flow, 2009.
[45] B. J. Azzopardi, “Disturbance wave frequencies, velocities and spacing in vertical annulartwo-phase flow,” Nuclear Engineering and Design, vol. 92, no. 2, pp. 121–133, 1986.
[46] B. J. Azzopardi, “Drops in annular two-phase flow,” International Journal of MultiphaseFlow, vol. 23, no. Supplement, pp. 1–53, 1997.
[47] R. M. Nedderman and C. J. Shearer, “The motion and frequency of large disturbance wavesin annular two-phase flow of air-water mixtures,” Chemical Engineering Science, vol. 18,pp. 661–670, 1963.
[48] N. S. Hall Taylor, G. F. Hewitt, and P. M. C. Lacey, “The motion and frequency of largedisturbance waves in annular two-phase flow of air-water mixtures,” Chemical EngineeringScience, vol. 18, pp. 537–552, 1963.
[49] C. J. Martin, “Annular two phase flow.” D. Phil Thesis, University of Oxford, UK, 1983.
[50] K. Mori, Y. Kondo, M. Kaji, and T. Yagishita, “Effects of liquid viscosity on characteristicsof waves in gas-liquid two-phase flow (characteristics of huge waves and disturbancewaves),” JSME International Journal Series B-Fluids and Thermal Engineering, vol. 42,no. 4, pp. 658–666, 1999.
[51] K. Mori, M. Kaji, Y. Kondo, and K. Sekoguchi, “Wave venation in downward gas-liquidtwo-phase flow (Part I, Time-spatial behavior chart of interface and analysis of mainwave-vein),” Heat Transfer – Japanese Research, vol. 25, no. 8, pp. 499–510, 1996.
[52] D. L. Pearce, “Film waves in horizontal annular flow: space-time correlator experiments,”CERL Note RD/L/N111/79, 1979.
[53] R. Kumar, M. Gottmann, and K. R. Sridhar, “Film thickness and wave velocity measure-ments in a vertical duct,” Journal of Fluids Engineering, vol. 124, pp. 634–642, Sept.2002.
[54] K. Sekoguchi, M. Takeishi, and T. Ishimatsu, “Interfacial structure in vertical upwardannular flow,” PCH: Physico-Chemical Hydrodynamics, vol. 6, no. 1/2, pp. 239–255, 1985.
[55] P. Sawant, M. Ishii, T. Hazuki, T. Takamasa, and M. Mori, “Properties of disturbancewaves in vertical annular two-phase flow,” Nuclear Engineering and Design, vol. 238,pp. 3528–3541, 2008.
[56] N. S. Hall Taylor and R. M. Nedderman, “The coalescence of disturbance waves in aannular two-phase flow,” Chemical Engineering Science, vol. 23, pp. 551–564, 1968.
[57] E. T. Hurlburt, L. B. Fore, and R. C. Bauer, “A two zone interfacial shear stress and liquidfilm velocity model for vertical annular two-phase flow,” in Proceedings of the ASME Fluids
140

Engineeering Division Summer Meeting 2006, vol. 2, (Miami, FL, USA), pp. 677–684,2006.
[58] D. Schubring, Behavior interrelationships in annular flow. PhD thesis, University ofWisconsin-Madison, Madison, WI, USA, 2009.
[59] M. Ishii and K. Mishima, “Correlation for liquid entrainment in annular two-phase flow oflow viscous fluid,” Argonne National Laboratory Report ANL/RA/LWR 81-2, 1981.
[60] L. B. Fore, S. G. Beus, and R. C. Bauer, “Interfacial friction in gas-liquid annular flow:analogies to full and transition roughness,” International Journal of Multiphase Flow,vol. 26, pp. 1755–1769, 2000.
[61] D. G. Owen and G. F. Hewitt, “An improved annular two-phase flow model,” in 3rdInternational Conference on Multi-Phase Flow, (The Hague, Netherlands), pp. 73–84,1987.
[62] N. Otsu, “A threshold selection method from gray-level histograms,” IEEE Trans. Sys.,Man., Cyber., vol. 9, pp. 62–66, 1979.
141

BIOGRAPHICAL SKETCH
Wesley Warren Kokomoor was born in 1985 as the youngest of three children. He was
born and raised in Englewood, Florida, graduating from Lemon Bay High School in 2004. He
earned his B.S. in Mechanical Engineering from the University of Florida in 2008 with a minor in
Material Sciences Engineering.
Wesley begain his graduate work at the University of Florida Department of Nuclear and
Radiological Engineering in the Fall of 2009 under the guidance of Dr. DuWayne Schubring. His
research has been focused on the computer-aided visualization of two-phase flow phenomena,
specifically vertical annular flow. Upon completion of his M.S. degree, Wesley plans to pursue a
carreer in private industry.
142