Embed Size (px)
Citation preview

Improving Vehicle Comfort and Safety Using Digital Human Modeling
Matthew P. Reed, PhD Research Associate Professor
Head, Biosciences Group, UMTRI Director, Human Motion Simulation Lab, Center for Ergonomics,
Industrial and Operations Engineering

University of Michigan
General Motors HQ
Ford HQ and Research Labs
Chrysler HQ
Toyota Tech Center
Hyundai-Kia Tech Center
General Motors Tech Center
Nissan Tech Center

U-M Transportation Research Institute • Behavioral Sciences Group
• Biosciences Group
• Driver Interface Group
• Engineering Systems Group
• Human Factors Group
• Vehicle Safety Analytics Group
• Vehicle Systems and Control Group
• Young Driver Behavior and Injury Prevention Group
• Center for the Management of Information for Safe and Sustainable Transportation (CMISST)
~150 research faculty and staff, $25M annual research volume

Center for Ergonomics Located in Industrial and Operations Engineering
Led by Prof. Tom Armstrong and 11 other faculty researchers
Human Motion Simulation Laboratory founded by Prof. Don Chaffin and Prof. Julian Faraway in 1998

Lab Overview Biosciences Group
Laboratory and Field Ergonomics
Studies"
"Crash Data
Analysis"
Engineering Anthropometry and
Ergonomics"
Human Motion Simulation Lab
Injury Biomechanics"
Motion Modeling"
Advanced Manikin
Development"
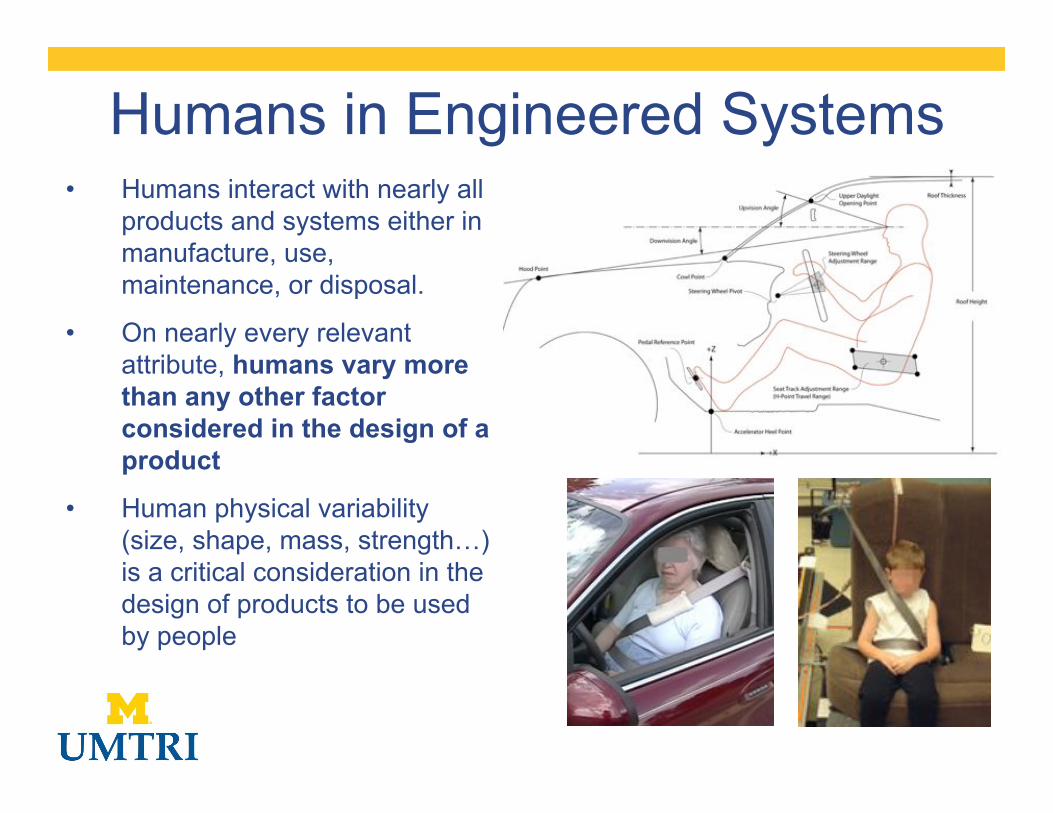
Humans in Engineered Systems • Humans interact with nearly all
products and systems either in manufacture, use, maintenance, or disposal.
• On nearly every relevant attribute, humans vary more than any other factor considered in the design of a product
• Human physical variability (size, shape, mass, strength…) is a critical consideration in the design of products to be used by people

Overview
Posture Prediction and Vehicle Occupant Accommodation"
Human Motion Simulation"
Body Shape Modeling and Advanced Manikin Development"
Major Challenges in DHM"

Posture Prediction and Accommodation

Posture Prediction and Accommodation Goals:
1. Predict the postures of individual vehicle occupants for human figure model analyses
2. Predict the distribution of occupant locations for accommodation
Methods:
1. Body landmark measurement using FARO Arm in vehicle and laboratory conditions
2. Statistical modeling of body landmark locations

What is Anthropometry? • Human Body + Spatial Measurement
= human size and shape
• Often used to mean anthropometric data or the application of anthropometric data
• Anthropometry is critical in the design of most engineered systems with which people interact
• Anthropometry is the oldest and most successful component of “human factors” engineering
Traditional Anthropometric Dimensions"

Functional Anthropometry
Measure Landmark Locations"
Statistical Analysis"
Standard Anthro for Target Population (NHANES, etc.)"
Seat design dimensions and tools"
SAE Standards: J941, J1052, J4002, J4003, J4004"
Posture prediction models for human figure models (Jack etc.)"
Vehicle and Seat Geometry"

Posture Prediction: Major Models
Passenger Cars and Light Trucks
Implementation: Jack (OPT), RAMSIS, Catia (VOA)
Large Trucks and Buses
Implementation: Jack (OPT), Catia (VOA)
Cascade Posture Prediction

Accommodation: Major Models
SAE J4004: Seating Accommodation
SAE J1052: Driver Head Contour
SAE J941: Driver Eye Location

Multivariate Functional Anthro
Measure Landmarks in Seated Postures"
Principal Component
Analysis"
Vehicle and Seat Geometry"
Joint Center Location Estimates" Crash Dummy Anthro Specs"
Regression"
Target Body Dimensions: Stature, Body Weight, …"
Large Child Omnidirectional Dummy
(Humanetics ATD)
Whole-Body Landmark & Joint Configurations"

Human Motion Simulation

Research Approach 1. Overall goal is to improve digital
human modeling software so that people can perform faster, more accurate ergonomics analyses
2. Detailed study of human motions in the laboratory
3. Focus on people performing generic tasks of interest: reaching, moving objects, stepping
4. Modeling of motions: goal is accurate simulation of new motions that have not been measured in the lab
5. Integrated consideration of biomechanics and ergonomics limits
Focus: Vehicle assembly & vehicle occupant interactions

Effects of Hand Force on Posture Suzanne Hoffman Ph.D. "Prediction of posture in standing tasks based on biomechanical principles"

Transit Model (David Wagner, PhD) Transition Stepping and Timing
1. Select stepping behavior based on task and operator characteristics
2. Scale transitions steps
3. Integrate with gait strides

Reference Implementation in Jack • The HUMOSIM Framework is a set of
statistical models, kinematic control algorithms, and biomechanical prediction methods.
• The demonstration and development implementation of the HUMOSIM Framework is written in Python for execution in the Jack human modeling system from UGS.
• The Reference Implementation uses only graphics and forward-kinematics functionality from Jack -- all other functionality is based on HUMOSIM algorithms

HUMOSIM Framework Task Input:
Figure and Environment Information:
Figure posture and position, object position and mass,
obstacles, …
Task Planner
Mid-Level Task Plan:
Walk, pick up, carry, place, manipulate, etc.
Independent of Current State of Environment and Figure
1. Place object A on object B
2. Use tool C with object A
3. …
Behavior Selection
“What to do?”

HUMOSIM Framework
Transit Model: foot placement and timing
Motion Planner
Resource-Based Component
Scheduling Model: sequence and timing of head, upper-extremity,
and torso motions
Biomechanical Motion Planner:
posture/motion targets based on
biomechanical criteria
Component-Level Motion Plan:
Steps, reaches, grasps, manipulations, gaze transitions, …
Current Reference
Implementation in Jack
Grasp and Object Manipulation Planner:
Hand placement and grasp
“How to do it?”

HUMOSIM Framework
Right Lower-Extremity Module: step following
Left Lower-Extremity Module: step following
Pelvis Module control pelvis trajectory and balance
Upper-Extremity Modules: hand position and orientation
Hand Module: grasp and object manipulation
Gaze Module: head and eye control
Torso Module: pelvis orientation and lumbar motion
Task Element Coordinator Schedule motor elements, plan sub-elements (foot movements, compensatory torso motions)
hmsHuman Motion Modules Component-Level Motion Plan:
Steps, reaches, grasps, manipulations, gaze transitions, …
Task Element Dispatcher
Simulation Clock
All modules incorporate feedback based on monitoring of current figure state relative to goals
Planned Current

Framework as Motion Parameterization • The Framework generates motions
as transitions between end-effector targets
• Gaze/hand/foot targeting is a useful midlevel description of many tasks
• Behavior-based obstacle avoidance adds non-contact interactions
• Preliminary ingress results generated using foot, hand, gaze, and pelvis targets Framework automatically adjusts for
different figure sizes, seat heights, seat positions, vehicle heights, roof positions, and sill positions

Effects of Hand Force: Simulation
One Hand, No Force, Fixed Feet
Two Hands, No Force, Fixed Feet
One Hand, Variable Force, Fixed Feet
Two Hands, Variable Force, Moving Feet

More on Automatic Posturing
Low Force, Auto Foot Placement Low Force, Obstacles

Gait and Transition Stepping

Five-Phase Hand Posture During Reach Reaching includes five phases:
Grasp
Relax
Release
Transport
Open

Simulated Grasp Motions
Power Grasp
Lateral Pinch
Two-Finger Pinch Precision Pinch
Based on a library of hand motions gathered with CyberGlove
Chuck Pinch

Runtime
Grasp Model Components
Reach hand trajectory planning
Grasp pose trajectory planning (PCA model)
Grasp location planning, including hand end effector location
Hand trajectory execution (6 dof)
Hand pose trajectory execution (22 dof)
Collision-based pose tuning
Movement Planning

Integration with Framework Analyze bounding box of grasp object ! select grasp type and location
Compute scaled aperture (object dimension/hand length)
Compute hand pose motion for desired duration of open+grasp motion phases
Place hand end effector site at computed location based on grasp type and object dimensions
As reach is executed, use collision-based grasp to tune hand posture during open+grasp phases

Integration with Framework Sequential reach-grasps using automatically generated and manually positioned grasp targets
Hand end effector is automatically repositioned with respect to hand based on planned grasp

HUMOSIM Framework in Action Toyota co-op and HUMOSIM student Helinda Ho conducted several case studies to test HUMOSIM Framework functionality.

HUMOSIM Framework in Action Comparisons of Framework (Jack) and Safework simulations by Toyota interns Helinda Ho and Rick Wetherhold

HUMOSIM Framework in Action Wei Zhou (PhD Student): Using Framework with a GUI developed by GM.

Driver Simulation Toolkit • Wraps Reference Implementation
functionality in high-level commands: steer right 45 degrees, shift from position 1 to position 2, press accelerator pedal
• Jack environment file contains typical targets: radio knob, forward vision target, left mirror vision target
• Designed to interface with QN-MHP in Virtual Driver via TCP/IP

Cognitive Model Connection The Virtual Driver: Linking the QN-MHP Cognitive Human Model with the HUMOSIM Framework
0"
10"
20"
30"
40"
50"
Short"Female"Midsize"Female"Midsize"Male"Tall"Male"
Task Duration (s)
Normal Vehicle Heavy Vehicle

Implementation in Commercial Software • We work closely with our technology partners to move our research
findings from the laboratory to industry
• Siemens has implemented a wide range of Humosim models and algorithms into Jack v7.
• Dassault Systems has implemented several models into Delmia V6

Body Shape Modeling

Surface Anthropometry Methods 3D whole-body laser scanning has transformed anthropometry research
In addition to traditional measures obtained with calipers and tape measures, we now record the whole body shape in various postures
UMTRI’s Whole-Body Laser Scanner"

UMTRI Lab Methods: Body Shape • standard anthropometry • whole-body laser scanner • optical landmarks • additional landmarks with FARO Arm • multiple standing and seated
postures
Laser towers (4)
Red laser beam
Hand-held laser scanner to augment towers
VITUS XXL Scanner

UMTRI Lab Methods: Body Shape • Scanning requires 12 seconds, plus an additional minute for hand
scanning in some postures • Seated postures span a wide range of recline and lumbar spine
flexion

Body Shape Modeling Whole-Body Scan Data
Clean and Fit Polygon Mesh
Manual Landmark Extraction
Manually Measured Body Landmarks
Handheld Scanner Data
Standard Anthropometry
Mesh with Landmarks Fit Homologous Mesh
Model Integration
PCA+Regression Analysis
Statistical Model to Predict Body Shape from Standard Anthro or Landmark Locations

3D Anthropometry CAESAR Study: First large-scale 3D anthro survey of US civilians
(1999-2000). Scans of 2400 adults (18-65 years) in 3 postures.
Statistical Approach: generate a parametric model of body shape as a function of predictors (gender, stature, weight, etc.)
Cyberware Whole-Body
Scanner"

3D Anthro: Statistical Modeling Statistical models of standing body shape using U.S. CAESAR data
Parametric Standing Whole-Body Model

3D Anthro: Statistical Modeling

3D Anthro: Statistical Modeling
Varying Stature, BMI, and Chest/Waist/Hip Ratios"Based on 1000 men and 1000 women from U.S. CAESAR"

Parametric Torso Models
Varying Stature, BMI, and Posture"Application to Office Chair Design"

Application: Seat Fit Finite-element modeling of seat-back interaction for auto seat design: use a population of realistic 3D models rather than a few occupant sizes

Skeletal Anthropometry Parametric Modeling of Skeletal Structures
CT Images
Data Extraction (N > 100)
Statistical Modeling
Predicted Skeleton Size and Shape = ƒ (stature, mass, …)
2nd PC of Ribcage Shape
Hybrid-III vs. Human Pelvis

Measuring Children UMTRI has gathered 3D anthropometry for 160 children ages 4-11 for crash safety applications
Raw scan data for some of the study postures"

Measuring Children
3D models for some of the study postures"

ATD (Crash Dummy) vs Child

Elderly Posture, Body Shape, and Belt Fit
Older Adults (N=180)
Statistical models of body shape: effects of age (Example from UMTRI analysis of U.S. CAESAR Data)
Application to ATDs and Human Body Models
Age 20 yrs Age 65 yrs

Elderly Posture, Body Shape, and Belt Fit
21 years 95 years

Anthropometry for Test Devices
Standard anthropometric data are gathered in standing and erect seated postures with minimal clothing
?
Seated posture and gear affect body shape and space requirements

UMTRI Seated Soldier Posture • Ongoing Army-funded study to quantify seated
soldier posture and body shape, including effects of body-borne equipment
• Body landmark locations and whole-body shape measured in a range of standing, driver, and crew seat conditions

Effects of Equipment on Space Claim
Overlaid scans without posture adjustment

Applications of 3D Anthro
Dummy Development"
Vehicle Interior Layout (Packaging)"
Human Body Models for Injury Prediction"
Figure Models for Ergonomics"
Seat Design"

Major Challenges in DHM

Major Challenges in DHM 1. Representing variability (size, shape, behavior, capability…), not
just a few examples
Problem Solution
Manikins don’t look like people
Improved parametric body shape, posture, and motion modeling
Takes a long time to do a simulation
Automated simulation tools
Summarizing results of multiple simulations
Improved statistical tools with graphical presentation

Major Challenges in DHM 2. Accurate, repeatable, reproducible analyses; result is not
dependent on the expertise of the software user
Problem Solution
No data available for most tasks
Increased laboratory and field research and better representation of results
Manual intervention by software users causes problems with repeatability
Automated simulation tools
Different software users get different answers
Better training and reduced user input (less need for expertise)

Major Challenges in DHM 3. Powerful, flexible tools for use by engineers without formal
training in ergonomics
Problem Solution
Software is hard to use Automated simulation with only high-level task description
Software results requires subjective interpretation
Software, rather than user, should do interpretation and prepare report
Better integration with CAD and engineering analysis tools
Stand-alone software requires additional training and licenses – rarely used

Acknowledgements This research has been supported in part by
mreed.umtri.umich.edu
Chrysler Faurecia
Ford Motor Company General Motors Herman Miller
Navistar U.S. National Highway Traffic Safety Administration
U.S. National Institute for Occupational Safety and Health Toyota Technical Center
U.S. Army





![Benefits of Improving Occupant Comfort and Well …181] Benefits of Improving Occupant Comfort and Well-being in Buildings Gail S. Brager Professor of Architecture and Associate Director,](https://img.pdfslide.net/doc/110x75/5ad2032c7f8b9a86158ca2f7/benefits-of-improving-occupant-comfort-and-well-181-benefits-of-improving-occupant.jpg)