Embed Size (px)
Citation preview

GEODESIC DOME ANALYSIS.
Item Type text; Thesis-Reproduction (electronic)
Authors Shirley, William Floyd.
Publisher The University of Arizona.
Rights Copyright © is held by the author. Digital access to this materialis made possible by the University Libraries, University of Arizona.Further transmission, reproduction or presentation (such aspublic display or performance) of protected items is prohibitedexcept with permission of the author.
Download date 03/06/2018 15:26:05
Link to Item http://hdl.handle.net/10150/275145
INFORMATION TO USERS
This reproduction was made from a copy of a document sent to us for microfilming. While the most advanced technology has been used to photograph and reproduce this document, the quality of the reproduction is heavily dependent upon the quality of the material submitted.
The following explanation of techniques is provided to help clarify markings or notations which may appear on this reproduction.
1.The sign or "target" for pages apparently lacking from the document photographed is "Missing Page(s)". If it was possible to obtain the missing page(s) or section, they are spliced into the film along with adjacent pages. This may have necessitated cutting through an image and duplicating adjacent pages to assure complete continuity.
2. When an image on the film is obliterated with a round black mark, it is an indication of either blurred copy because of movement during exposure, duplicate copy, or copyrighted materials that should not have been filmed. For blurred pages, a good image of the page can be found in the adjacent frame. If copyrighted materials were deleted, a target note will appear listing the pages in the adjacent frame.
3. When a map, drawing or chart, etc., is part of the material being photographed, a definite method of "sectioning" the material has been followed. It is customary to begin filming at the upper left hand corner of a large sheet and to continue from left to right in equal sections with small overlaps. If necessary, sectioning is continued again—beginning below the first row and continuing on until complete.
4. For illustrations that cannot be satisfactorily reproduced by xerographic means, photographic prints can be purchased at additional cost and inserted into your xerographic copy. These prints are available upon request from the Dissertations Customer Services Department.
5. Some pages in any document may have indistinct print. In all cases the best available copy has been filmed.
University MicnSilms
International 300 N. Zeeb Road Ann Arbor, Ml 48106

1324112
SHIRLEY, WILLIAM FLOYD
GEODESIC DOME ANALYSIS
THE UNIVERSITY OF ARIZONA M.S. 1984
University Microfilms
International 300 N. Zeeb Road, Ann Arbor, MI 48106


PLEASE NOTE:
In all cases this material has been filmed in the best possible way from the available copy. Problems encountered with this document have been identified here with a check mark V .
1. Glossy photographs or pages if
2. Colored illustrations, paper or print
3. Photographs with dark background
4. Illustrations are poor copy
5. Pages with black marks, not original copy
6. Print shows through as there is text on both sides of page
7. Indistinct, broken or small print on several pages )/
8. Print exceeds margin requirements
9. Tightly bound copy with print lost in spine
10. Computer printout pages with indistinct print
11. Page(s) lacking when material received, and not available from school or author.
12. Page(s) seem to be missing in numbering only as text follows.
13. Two pages numbered . Text follows.
14. Curling and wrinkled pages
15. Other
University Microfilms
International


GEODESIC DOME ANALYSIS
by
William Floyd Shirley
A Thesis Submitted to the Faculty of the
DEPARTMENT OF CIVIL ENGINEERING AND ENGINEERING MECHANICS
In Partial Fulfillment of the Requirements For the Degree of
MASTER OF SCIENCE WITH A MAJOR IN CIVIL ENGINEERING
In the Graduate College
THE UNIVERSITY OF ARIZONA
19 8 4

STATEMENT BY AUTHOR
This thesis has been submitted in partial fulfillment of requirements for an advanced degree at The University of Arizona and is deposited in the University Library to be made available to borrowers under rules of the Library.
Brief quotations from this thesis are allowable without special permission, provided that accurate acknowledgment of source is made. Requests for permission for extended quotation from or reproduction of this manuscript in whole or in part may be granted by the head of the major department or the Dean of the Graduate College when in his or her judgment the proposed use of the material is in the interests of scholarship. In all other instances, however, permission must be obtained from the author.
SIGNED:
APPROVAL BY THESIS DIRECTOR
This thesis has been approved on the date shown below:
REIDAR pdORHOVDE Professor of Civil Engineering
and Engineering Mechanics
Date

ACKNOWLEDGMENTS
The author wishes to thank the faculty and staff of the
Department of Civil Engineering for the help received during his
education at the University of Arizona. In particular, Dr. Erdal Atrek
and Dr. Mohammad Ehsani are thanked for the fine instruction received
in their classes and for serving on the author's M.S. Committee.
Special thanks go to Dr. Ralph M. Richard for his personal encour
agement to enter graduate school; and the author would also like to
express his sincere gratitude to Dr. Reidar Bjorhovde for his advice,
encouragement, and guidance in completing this thesis.
Thanks are extended to the author's father, mother, and
brother for their patience. Special thanks also go to the author's
grandparents for their financial support — without them, none of
this would be possible.
The author acknowledges the assistance of Mun Foo Leong in
conducting the dome test. Rarely does a man such as "Eddie" come along
and give so much while asking so little in return. The efforts of
Charlotte McDole in typing the manuscript are also gratefully
acknowledged.
Lastly, the author thanks his two closest companions:
John Joseph Aube, and Carla Rae Wohlers. To balance the often cold and
sterile environment of academia, these two offered humor, excitement,
and love. Thank you both.
iii

TABLE OF CONTENTS
Page
LIST OF ILLUSTRATIONS v
LIST OF TABLES viii
ABSTRACT ix
1. INTRODUCTION 1
2. SCOPE 9
3. DEVELOPMENT OF GEODESIC DOMES 11
4. FULL SCALE TESTING OF DOMES 29
4.1 Dome Test by H.C. Nutting Company 31 4.2 Dome Test at University of Arizona 33
5. THEORETICAL ANALYSIS 52
6. COMPARISON OF THEORETICAL AND EXPERIMENTAL RESULTS .... 72
7. SUMMARY AND CONCLUSIONS 88
APPENDIX A 90
APPENDIX B 105
REFERENCES 115
iv
LIST OF ILLUSTRATIONS
Figure Page
1 Plan and Profile of a Typical Geodesic Dome 2
2 Joining Methods for Hub and Panel Domes 5
3 Common Joint Types for Hub Domes 6
4 Steel Strap Usage in Panel Domes .... 6
5 The Platonic Polyhedra 14
6 Frequency Division With Class I Method 15
7 Generation of a Three-Frequency Icosahedral Geosphere ... 18
8 Faces of a Three-Frequency Icosahedral Geodesic Sphere . . 19
9 Cross Section of an Icosahedron 20
10 A Regular Pentagon Formed From the Edges of an Icosahedron 21
11 Positions of the Intersphere and Innersphere of an Icosahedron 22
12 Projection of Face Divisions Onto Sphere 24
13 Projection of an Internal Edge Onto a Sphere 25
14 Three-Frequency Icosahedron Net 27
15 Plan and Profile of Pease Domes 30
16 Panels for 39' diameter Dome 32
17 Loaded Area and Gauge Locations for 39' Diameter Dome (Plan View) 34
18 Loaded Area and Gauge Locations for 39' Diameter Dome (Profile View) 35
19 Panels for 45' Dome 37
20 Cross S-ection of Framing Members for 45' Dome 40
v

vi
LIST OF ILLUSTRATIONS — Continued
Figure Page
21 Loaded Area for 45' Dome 40
22 Sandbags Used for Loading 41
23 Plastic Sheets Sealing Dome 41
24 Measurement Reference Tables 43
25 Data Recording Procedures 45
26 Set-up to Record Footing Movement 46
27 First Load Ramp in Place on Dome 46
28 Two-by-Two Nailing Cleats 48
29 Two-by-Four Perimeter Forms 48
30 Loading the Dome 49
31 Principal Axes of Wood 57
32 Dome Nodal Positions 59
33 Deflection Results Using Bar Elements and Bar With Trim Elements for Model 45' Dome 60
34 Deflection Results Using Beam Elements and Beam With Trim Elements to Model 45' Dome 61
35 Deflection Results Using Trim Elements to Model 45' Dome 62
36 Deflection Results Using Bar Elements and Bar With Trim Elements to Model 39' Dome 63
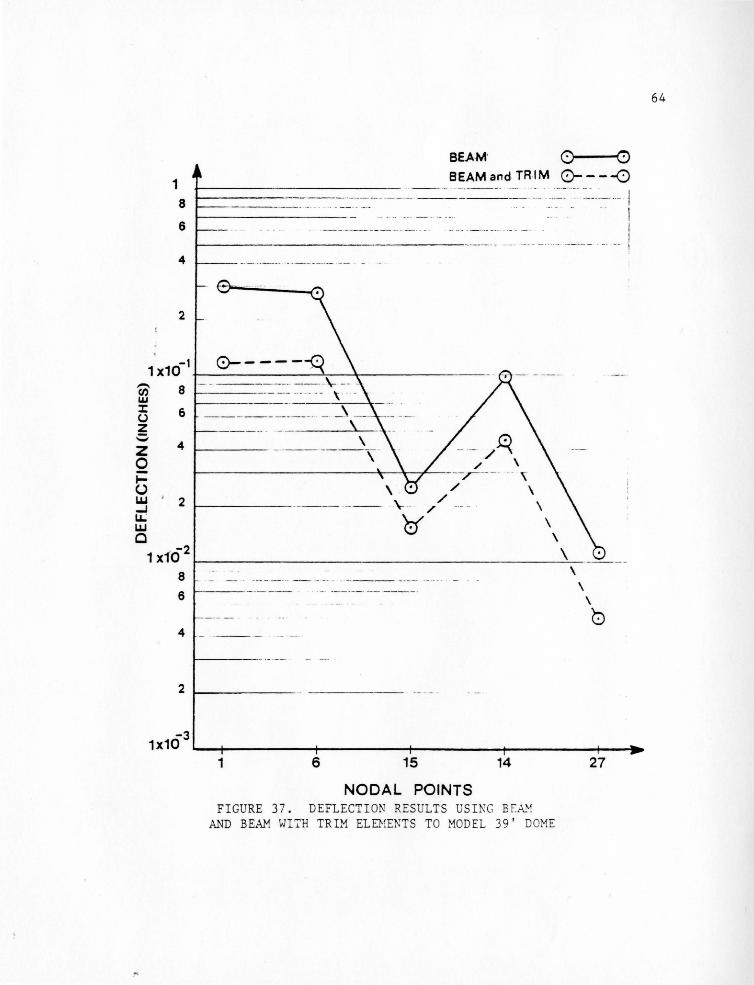
37 Deflection Results Using Beam Elements and Beam With Trim Elements to Model 39' Dome 64
38 Deflection Results Using Trim Elements to Model 45' Dome 65
39 Deflection Results of 45' Diameter Dome Modeled Using Trim Elements of Various Thickness (Asymmetric Loading, Side A) 68

vii
LIST OF ILLUSTRATIONS -- Continued
Figure Page
40 Deflection Results of 45' Diameter Dome Modeled Using Trim Elements of Various Thickness (Asymmetric Loading, Side 8) 69
41 Deflection Results of 45' Diameter Dome Modeled Using Trim Elements of Various Thickness (Symmetric Loading, Sides A and 8) 70
42 Deflection Results of 39' Diameter Dome Modeled Using Trim Elements of Various Thickness (Symmetric Loading) 71
43 Plumb Bob Deflections, Rebound, and Surveyed Deflections for the 45' Dome 73
44 Deflection Data for the 45' Dome Plotted With the Five Finite Element Models 76
45 Deflection Data for the 39' Dome Plotted With the Five Finite Element Models 79
46 Deflection Data for 39' Dome Plotted With the Three Modified Shell Models 85
LIST OF TABLES
Table Page
1 Tabulated Deflection Results for Thirty-Nine Foot Diameter Dome 36
T 2 Deflection Results for Forty-Five Foot Diameter
Dome 50
T 3 Deflection Results for Forty-Five Foot Diameter
Dome 51
viii

ABSTRACT
Results of physical testing and analytical studies are presented
for two geodesic domes. The domes are of the Pease panel dome variety
with different diameters. Deflection distributions are reported for
domes having symmetrically and asymmetrically applied uniform loads.
The development of geodesic domes is discussed with particular
attention paid to the calculation of chord factors. Information
regarding the development of domes from various polyhedra is also
included.
Analytical studies concentrate on the evaluation of conventional
finite element models. Beam, bar, and trim elements are used in various
combinations to model the structure. Application of various modified
shell analyses are also included.
It is concluded that Pease panel domes, if adequately preloaded,
can be modeled using pinned-end beam elements or trim elements. The
load distribution behavior of the domes, in regard to truss or membrane
action, is also discussed.
ix

CHAPTER 1
INTRODUCTION
Figure 1 shows the plan and profile views of a typical geo
desic dome. Developed in the 1940s by R. Buckminster Fuller, the
geodesic dome is now part of a family of structures known as reticu
lated shells [1,2]. These are structures that approximate simple
solid shells through frameworks of linear structural members [2]. In
particular, the geodesic dome is a multi-faceted polyhedron in which
all the vertices lie on the surface of a sphere [3]. When the ver
tices are connected with struts, a series of complete, and incomplete,
intersecting great circles are formed [4].
Many domes have been built since Fuller first invented the
structure. Although the dome is best suited to enclosing large areas
where interior divisions or interior supporting members are undesir
able, domes have a variety of applications including: industrial
structures, portable military shelters, commercial buildings, homes,
greenhouses and children's playground structures. The geodesic dome
has been the architectural and engineering solution for a variety of
structural problems.
In spite of the number of domes in use today, after more than
thirty years, the geodesic dome remains a novelty. The reasons for
this may lie in the methods of design and analysis of the structures.
Geodesic domes are mathematically derived systems and the mathematics
1

Ca) PLAN
(b) PROFILE
FIGURE 1. PLAN AND PROFILE OF A TYPICAL GEODESIC DOME

3
involved is both tedious and complicated. In addition, any structure
that is built should be evaluated by testing or a thorough engineering
analysis to insure that it meets the required building codes. Al
though a variety of approaches have been used, methods for design and
analysis of geodesic domes are still not well established.
Although few full scale tests on domes have been completed,
some domes have been subjected to such adverse conditions that they
are often pointed to as examples of the dome's structural integrity.
In 1955, Fuller produced a series of domes for the United States Air
Force's D. E. W. (Distant Early Warning) line that extends across 3000
miles of frozen tundra in Alaska and Canada. These fifty-five foot
diameter, forty-foot high domes withstood static load testing for wind
velocities in excess of 220 miles per hour [1],
A test with tabulated deflection data was performed using a
North American AT-6 Army Trainer equipped with a 650 horsepower Pratt-
Whitney engine to produce wind speeds in excess of seventy miles per
hour. The test was accomplished by backing the aircraft up to the
dome at different angles, and no structural damage was reported [3].
In 1959, a number of load deflection tests were performed by the H. C.
Nutting Company on two different Pease plywood domes. The domes were
able to withstand a uniform load of 100-110 pounds per square foot on
their apex and surrounding triangles [5].
In the absence of a full scale test, adequate structural
analysis must be provided to support the dome's structural integrity.
Some of the approaches that have been used to analyze geodesic domes
include: the equations of equilibrium applied to the three

4
dimensional truss [6], finite element analysis applied to the frame
and its panels [7], a modified shell analysis using member properties
to calculate an effective shell thickness [2,9,18], and classical
shell analysis [8]. All of these methods have a strong basis in
theory, and some have been developed after studying actual dome
failures or the behavior of scale models. Each method attempts to
provide an analysis procedure for any or all of the following causes
of dome failure: the overstressing of individual members either
axially or flexurally, buckling of individual members, local or
"dimple" buckling of the overall shell, and overall shell instability.
Each of the above approaches was chosen after making assump
tions based on the characteristics of the particular dome being looked
at. However, the general application of any one of these methods to
geodesic domes can be questionable, due to the uncertainties inherent
in the structure and its details, as well as the loading conditions.
To understand why the results of these methods may be unreli
able in regard to some geodesic domes, a closer look at dome construc
tion is required. Figures 2(a) and 2(b) represent the two joining
techniques commonly used in dome construction today. In Figure 2(a)
the five triangular panels that form the apex of a hub dome are shown.
Note that at each joint, all the framing members are securely pinned.
The hub shown is typical, but other forms have been used as shown in
Figure 3. The structurally important feature of the hub dome is that
the compressive and tensile axial forces in the joining members are
transmitted through the joint.

(a) HUB DOME APEX
(b) PANEL DOME APEX
FIGURE 2. JOINING METHODS FOR HUB AND PANEL DOMES

Cb) GUSSET PLATE (a) TRIODETICS
FIGURE 3. COMMON JOINT TYPES FOR HUB DOMES
STEEL STRAPS
FIGURE 4. STEEL STRAP USAGE IN PANEL DOMES
7
Figure 2(b) shows the same five sections joined to form the
apex of a panel dome. The sections are connected by passing bolts
through the legs of adjacent panels. Although the main members do
carry load, the load is primarily distributed through shear in the
bolts, and at the joints load may, or may not, be transmitted to the
members that intersect there. Load paths in panel domes are further
complicated by the introduction of metal straps used to join some of
the panels together. The strap, illustrated in Figure 4, is designed
to keep some of the neighboring panels from "blossoming" or separating
when the dome is subjected to extreme loads.
Both three-dimensional truss and finite element methods of
analysis are based on the assumption that the individual members that
compose the structural system are joined at the ends, and that load is
transmitted through these joints or nodes. The hub dome obviously
meets this requirement, but there is some question about the panel
dome. In addition, three-dimensional truss analysis has no provision
for including the membrane action of the dome panels or skin, and
although membrane elements can be included in finite element analysis,
there is still the problem of whether the computer model accurately
depicts the dome's structural detailing.
Shell analysis, on the other hand, appears particularly suited
for analyzing the membrane action but fails to include the contribu
tion of the framing members. Methods of analyzing an effective shell
derived from the geometric and material properties of the framing
members have been used successfully by many designers, but once again
this approach concentrates only on the shell behavior, and the method

8
has only been applied to hub domes where the joints are either pinned
or fixed [2,10]. The domes analyzed by this procedure have also been
quite large, where the grid element and membrane element have been
essentially in the same plane; for example, the framing members are
curved or the grid modulus is small compared to the radius of curva
ture [9].
Recognizing the extensive use of domes today, it is essential
that the reliability of the methods of analysis be determined. To
date, domes have been analyzed in what appears to be a random choice
of any of the methods described above. In view of the Pease panel
dome's differences in construction detailing, this is a practice that
should not be made lightly and certainly warrants further investiga
tion. The need for cohesive and rational methods that agree with test
results is obvious.

CHAPTER 2
SCOPE
Although some full scale tests of geodesic domes have been
performed, it has not been possible to find any where the results have
been compared with those of analytical studies. A modified shell
analysis method was developed on the basis of a study of dome failures
[Wright, 1965] and the behavior of scale models [Lederer, 1963].
However, all of these structures exhibited properties that differ
substantially from the Pease panel dome [2,6].
This study will examine the available methods of analysis as
they apply to Pease panel domes. Utilizing the available data from
tests conducted by the H. C. Nutting Company [5] and the data from a
full scale test conducted by the author, the analysis procedure that
is best suited for these structures will be determined. The theoret
ical evaluation will concentrate particularly on refining some of the
present techniques and assessing the possibility of combining the
different approaches.
To accomplish this task, the geodesic dome will be modeled for
computer analysis in a number of different ways. Each of the models
will emulate the geometric, material, and joining assumptions used in
the analyses described above. In addition, this procedure will also
allow some of the different analysis techniques to be combined into
one model. To check the validity of the results, each model will be
9

loaded in the same manner as the full scale tests, and computer-
predicted deformations will be checked against test deflections.
The comparison of the theoretical and the experimental data
will be used to evaluate the suitability of each model as a design
tool for Pease panel domes. It is anticipated that this will produce
a reliable method of structural evaluation of these domes.
CHAPTER 3
DEVELOPMENT OF GEODESIC DOMES
The first domes appear to have been built in the Near East,
India, and the Mediterranean region [11]. Generally they were used
only for the smallest of buildings.
Domes became technically significant during the Roman era with
the development of better building materials, and the recognition of
arch action [12]. The domes of this period were constructed as a
series of arches having the same center, which allowed for much larger
structures, but the overall size was still limited due to the thrust
developed at the base [11,12]. Rammed earth was the common method of
buttressing, used to resist the thrust, until the development of
concentric chains and iron girdles during the Renaissance [11,12].
These buttressing techniques reduced the base thrust and domes became
even larger, culminating in diameters of around 150 feet [11,12],
Fuller combined the arch principal and new materials into a
dome design that would distribute stresses entirely within the struc-
ure itself. The geodesic dome distributes load compressively through
chord members that lie longitudinally along the great circles. The
base thrust, or horizontal component of force, transmitted from these
compressive members is then resisted by meridian chord members that
lie along small circles of the sphere forming a series of tension
rings.
11

12
Fuller's design thus eliminated the need for large buttress type
footings. Geodesic domes can be supported by light walls or set
directly on the ground. The design employs circles which enclose the
most area with the least perimeter to define the space and triangles
which enclose the least area with the most perimeter to distribute the
forces, thus producing a design that is strong but lightweight [13].
To gain an appreciation for the geodesic dome, as it is commonly
thought of today, requires a closer look at the geometry that led to its
development. Geodesic mathematics includes the study of polyhedra,
spherical trigonometry, plane trigonometry, and plane geometry. In
researching this topic, several references were reviewed [1,3,4,14,-
15,16]. The two that proved to be the most helpful in understanding
geodesic mathematics were: Polyhedra, University of California Press,
1976, and Domebook 2, Pacific Domes, 1971 [3,14],
The term "geodesic," which comes from the Greek word for "earth
dividing," was originally used in connection with large land surveys
that included the earth's curvature in the calculations [12]. In
mathematics, the term is used to describe a line between two points on
any mathematically derived surface. If that surface is curved, then any
geodesic line on that surface is also curved. When the surface is a
sphere, the geodesic lines will be segments of great circles, with a
great circle being any circle with a center that coincides with the
sphere's, and thus divides the sphere into two equal parts.
Fuller's geodesic domes were developed from the realization
that a sphere can be generated from a network of intersecting geodesic
lines, forming triangles with their legs either following those lines,

or joining along them. By replacing the curved geodesic lines with
chords joining the intersections, the spheres can be fashioned from
planar triangular elements, producing a sphere-shaped polyhedron.
Since the polyhedron is produced using chords instead of curved geo
desic lines, the terms "geodesic dome" and "geodesic polyhedra" are
actually misnomers; however, due to their common use by dome designers
and manufacturers, the terminology will also be used in this study.
Although a variety of polyhedra can be used to form domes, the
most common are the platonic polyhedra, illustrated in Figure 5. The
tetrahedron, hexahedron, octahedron, icosahedron, and dodecahedron are
the only five polyhedra that are composed of identical sides, angles,
and faces. The inherent symmetry of this class of polyhedra allows for
further subdivision of the faces into elements of equal size. It is
this quality that makes these polyhedra the most desirable for domes.
There are two principal methods of subdividing the faces of
the platonic polyhedra: Class I, also called the Alternate Method,
and Class II, also known as the Triacon Method. Both of these methods
begin with dividing the nontriangular faces of the polyhedra into
triangles by connecting the center of the face to each of its ver
tices. Further subdivision of each triangle is unique to each method.
Since the Class I method appears to be the most common, it will be
presented here. The reader is referred to the references mentioned
above for treatises on the Class II approach.
Figure 6 illustrates how each of the triangular faces can be
subdivided, by dividing the legs into equal segments, then connecting
the divisions with lines running parallel to the legs, forming rows of

14
TETRAHEDRON
HEXAHEDRON
OCTAHEDRON
ICOSAHEDRON
DODECAHEDRON
FIGURE 5. THE PLATONIC POLYHEDRA

1 FREQUENCY
3 FREQUENCY
5 FREQUENCY
FIGURE 6. FREQUENCY DIVISION WITH CLASS I METHOD

smaller triangles. The number of equal divisions made along any leg
of the face triangle is defined as the frequency of the structure.
Thus, everything from one frequency tetrahedrons to infinite frequency
dodecahedrons is possible.
Geodesic domes are usually formed from icosahedrons and dodeca
hedrons. Compared to the other forms of platonic polyhedra, these two
forms produce the least number of different sized faces and edges,
compared to the number of faces and edges generated when the frequency
is increased and the polyhedron is expanded to form a sphere. In
addition, the difference between the longest and the shortest elements
is smaller than for the other polyhedra. The domes that are fashioned
from these two types will therefore have a more uniform appearance
than those produced from the others.
The task of designing a geodesic dome with a number of fre
quencies and polyhedra to choose from can be difficult. However,
mathematical relationships have been developed between the overall
dimensions of a polyhedron and the length of the edges. The chord
factor is a number, that when multiplied by the radius of the geodesic
dome, will give the lengths of the individual struts. When the fre
quency of a polyhedron increases, so does the number of faces, edges,
and vertices, and if that polyhedron is being expanded to form a
sphere, then the number of different sized faces and edges will also
increase. An individual chord factor is defined for each different
edge length produced. Generally, the number of chord factors asso
ciated with any particular dome will equal its trequency, although the

17
number is dependent on the polyhedron chosen, and the method used to
subdivide the polyhedron faces.
Within the Class I and Class II methods of subdivision, there
are several approaches that can be used to calculate the chord fac
tors. The development presented here is called Class 1, Method 1. To
illustrate the approach, the chord factors for a geodesic dome gen
erated by a three-frequency icosahedron will be determined. Chord
factors for other polyhedra and frequencies are contained in Appendix
A.
Figure 7(a) shows a typical triangular icosahedron face that
has been subdivided using the Class I approach. At this point, the
reassembled polyhedron is an icosahedron whose plane faces as shown in
Figure 7(b). The polyhedron will rest inside a circumscribing sphere
with each of its vertices touching the surface of the sphere. The
geodesic sphere can now be generated by projecting from the center of
the polyhedron, each edge and vertex of the subdivided faces, to the
surface of the circumscribing sphere, as in Figure 7(c). The final
product, a geodesic sphere generated from a three-frequency icosa
hedron, is shown in Figure 8(a).
As the subdivided face is projected onto the sphere, each of
the edges must elongate. Noting the symmetry, a careful examination
of Figure 7(c) reveals that three unique edges and two unique faces
have been produced. Figure 8(b) illustrates these for one of the
principal icosahedron faces. Chord factors for each of the edges can
be calculated by analyzing the icosahedral geometry.

SSDiVlDED FACP n *" IC°WS op
f^AsSEMBlED ICosahedROu
( c ) PR°JECTI0n
Ge^ration
ONTO SpHERE
OF a TmEE-mQl!ES,
CY ICOSAHEDRAL
ge°sphere
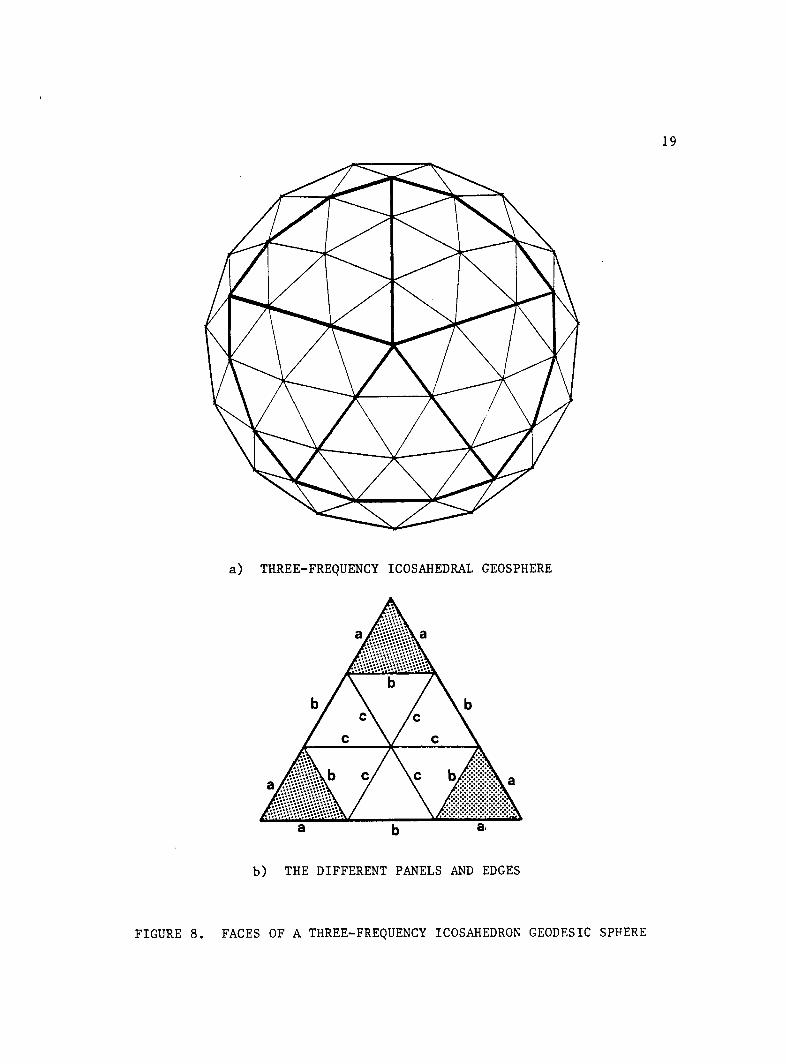
a) THREE-FREQUENCY ICOSAHEDRAL GEOSPHERE
b) THE DIFFERENT PANELS AND EDGES
FIGURE 8. FACES OF A THREE-FREQUENCY ICOSAHEDRON GEODESIC SPHERE

20
Figure 9 shows the cross section of an icosahedron that has
been split in two by passing a cutting plane through two opposing
edges. The circle surrounding the cross-section has the same radius
as the sphere circumscribing the geodesic icosahedron. This is the
radius that the chord factors are related to. Inspecting the geometry
of the figure reveals that ABCD is a golden rectangle, and that
lengths AB and DC are equal to the diagonals of a regular pentagram of
edge length AD. By relating sides AD and BC to sides AB and CD, the
Pythagorean theorem can be used to relate the circumscribing radius,
Rj, to the edges of the principal icosahederal faces.
diagonals equal to AB. Application of the law of cosines yields
CUTTING PLANE SECTION
FIGURE 9. CROSS SECTION OF AN ICOSAHEDRON
Figure 10 shows a regular pentagon of sides equal to AD and
(AB)2 = 2(AD)2(1 - cos 108°) (1)

21
FIGURE 10. A REGULAR PENTAGON FORMED FROM THE EDGES OF AN ICOSAHEDRON
substituting for cos 72° = - cos 108° gives
(AB)2 = 2(AD)2(1 + cos 1 2 ° ) . (2)
Applying the Pythagorean theorem to Figure 9,
(2RP2 = .AB2 + AD2 (3)
and substituting for AB gives:
_ _ AD J 3 + 2 cos 72° •I ~ 2 (4)
For a geodesic sphere of radius equal to unity, edges AD = 1.051462.
Further derivation of the individual chord factors requires
the definition of the intersphere and innersphere, denoted R^ and R^,
respectively. Shown in Figure 11, the intersphere is tangent to the
midpoint of each of the icosahedron edges, and the innersphere is
tangent to the center of the faces.
From Figure 11, the radius of the intersphere, R£, is
_ M -v 2(AD)2(1 + cos 72°) 2 2 2 (5)
The innersphere is tangent to the center of each face, and the
radius R^ therefore will be perpendicular and its arc tangent at a
point one-third from the triangle's base along the altitude AE. Since
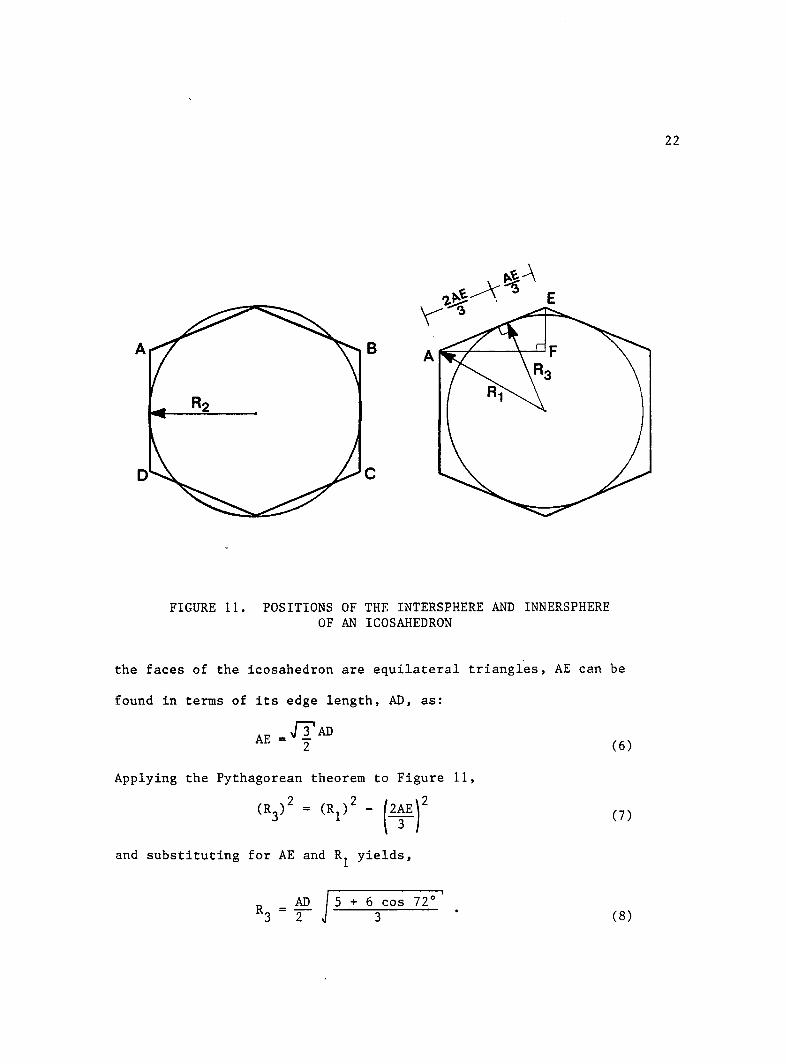
22
B
FIGURE 11. POSITIONS OF THE INTERSPHERE AND INNERSPHERE OF AN ICOSAHEDRON
the faces of the icosahedron are equilateral triangles, AE can be
found in terms of its edge length, AD, as:
AE JTad
2
Applying the Pythagorean theorem to Figure 11,
(R3)2 - <V2 - (2AE)2
and substituting for AE and R^ yields,
( 6 )
(7)
D A D I 5 + 6 c o s 7 2 ' 3 " 2 (8)

23
For a three frequency icosahedron, the edges AD are divided
into three equal segments, which are then projected onto the circum
scribing sphere, as shown in Figure 12. From the right triangle
with sides AD/6 and R^, a new radius, R^, can be computed as:
(R )2 = (R )2 + |AD\2 4 16/ (9)
substituting for R^ yields:
(R )2 = AD2 (1 + cos 72°) AD2 4 2 36
= AD2 (19 + 18 cos 72°) 36
,
Hence, R, = VAD2 (19 + 18 cos 72°) 4 6 . (10)
Further inspection of Figure 12 shows that the triangles OGH
and OG'H' are similar, so the chord length GH can be found as,
GH -
\ • < H >
From above, the computed length of edge AD is 1.051462, when Rj equals
unity. Substituting these values into the equation for chord GH, GH =
0.4035482. This is the chord factor for the subdivided edge of length
b. CF b = 0.4035482 . (12)
Referring again to Figure 12, the angle 0 can be found by
applying the law of cosines to triangle OAG'. Thus,
, (R.)2 + (R,)2 - (AD/3)2 cos 0 = 1 4
2(RL)(R4) • (13)

FIGURE 12. PROJECTION OF FACE DIVISIONS ONTO SPHERE
Reapplying the law of cosines to triangle OAG, the chord length AG is
found to be
(AG)2 = (Rx)2 + (Rx)2 - 2(R1)(R1) cos 0
OR AG
= 2(Rl) (1 - cos 0),
= Rj J2(1 - cos 0)' . (14)
Making the proper substitutions with R^ = 1.0 yields AG = 0.348615.
Since the chord AG is identical to the subdivided edge of length a,
CFa = 0.348615 (15)
The remaining chord factor can be calculated by applying the
same techniques as described above. Figure 13(b) illustrates the
internal edge of the subdivided icosahedron face being projected onto

25
\R1
' J R5 erV
^̂ 4
K
K'
(a)SUBDIVICED FACE (b) PROJECTION
FIGURE 13. PROJECTION OF AN INTERNAL EDGE ONTO A SPHERE
the circumscribing sphere. Since the subdivision of the icosahedron
face produced nine equilateral triangles of edge length AD/3, as shown
in Figure 13(a), the length of IK = 2(AD)/3. Inspection of Figures 12
and 7(b) show that the distance from the center to I or K will equal
R^. Application of Pythagoras' theorem to Figure 13(b) gives
(R5)2 = (R4)2 - (AD/3)2.
From the right triangle OJI,
a cos p = _5
R4
and the application of the law of cosines to OJ'I' yields:
(I'J')2 = (Rx)2 + (Rl)2 - 2(R1)(R1) cos 6
( 1 6 )
= 2(Rj) (1 - cos 8) (17)
Since the chord length I'J' is equal to the projected edge of length
C, substitution of = 1.0 into the above equations results in
CFc = 0.412411 ( 1 8 )
The development of chord factors facilitates the task of
determining the geometry of geodesic domes, but another topic that
also requires attention is the truncation of the dome. The full
geodesic sphere is seldom used for a geodesic dome. More often the
sphere is truncated along some convenient path providing a usable
enclosure without excessive height. Designations of truncation vary
among authors, although the method presented by Pugh in Polyhedra [14]
appears to be the most descriptive.
In Figure 14, the net for a three frequency icosahedron is
shown. Assuming the top of the figure represents the top of the dome,
truncation levels can be designated by a fraction of the number of
panels used over the number of panels available in the complete
geodesic sphere. For example, a geodesic sphere truncated along
course A-A would produce a 5/12 geodesic dome.
In the preceding discussion it was noted that there are two
principal methods of subdividing polyhedra: Class I and Class II.
With the Class I approach, a dome must be truncated at the 1/2 level
to allow it to rest level on the ground. This is an unfortunate
consequence of its geometry, and one that must be accounted for during
construction. Many domes, including the ones that are analyzed later
in this report, are constructed with certain panels missing to allow
access to the structure. As long as care is taken in removing the

27
75/180 — * y \ A A ^ 5/12
175/180 ^r/ \Z\/__— 3^36 180/180 V V V V V y1
FIGURE 14. THREE-FREQUENCY ICOSAHEDRON NET
appropriate panels, a dome developed using the Class I approach can be
constructed to rest evenly at any truncation level.
Domes developed using the Class II approach will sit evenly at
any level of truncation. This results from the spherical geometry
that is utilized in their generation. It should be noted that Ful
ler's domes were developed using the Class II approach, and for very
large structures, it is preferred instead of Class I.
The introduction of multiple frequency polyhedrons and various
levels of truncation adds complexity to the structural design and
analysis of geodesic domes. If a large dome of relatively low
frequency is built, then the design of the framing members becomes the
principal concern. On the other hand, if a dome of equal size is
28
built using a very high frequency, the structure will more closely
resemble a shell, and the shell behavior becomes the dominant concern.
Various levels of truncation can also alter the stress dis
tribution within the structure. The general geodesic dome design
philosophy suggests that the dome may be truncated anywhere without
losing any structural integrity. However, it is intuitively obvious
that a dome built of sufficiently high frequency may develop excessive
stresses near the base if it is truncated too deeply. The accurate
determination of these stresses would be dependent on the method of
analysis chosen.
If a reliable method of analysis is available, a geodesic dome
of any desired diameter and height can be designed by determining the
appropriate length of members that will generate a dome capable of
resisting the applied loads.

CHAPTER 4
FULL SCALE TESTING OF DOMES
The accuracy of a method of analysis can be evaluated through
full scale tests. By measuring the behavior of the structure under
load and comparing the results with those predicted by various meth
od (s) of analysis, the reliability of each method can be determined.
Ideally the data collected to represent the structure's behavior would
include nodal deflections and member strains at as many points as
possible. However, due to the size of some structures, and the
materials used to construct them, the ideal is not always the prac
ticable .
The two geodesic dome tests discussed in the following in
volved structures with over one hundred framing members and forty-two
joints. With this many degrees of freedom, it was deemed impractical
to record data for all of the joints and members. Therefore nodal
deflections were collected only at significant points. Also, since
both structures were made of wood, the use of strain gauges was diffi
cult if not impossible, preventing any measurement of the individual
member stresses.
Both domes were Pease panel domes generated from a three-fre-
quency icosahedron truncated at the 5/12 level. A total of fifteen
panels were removed from five different locations around the base to
provide access to the dome. Figure 15 shows the plan and profile of
29
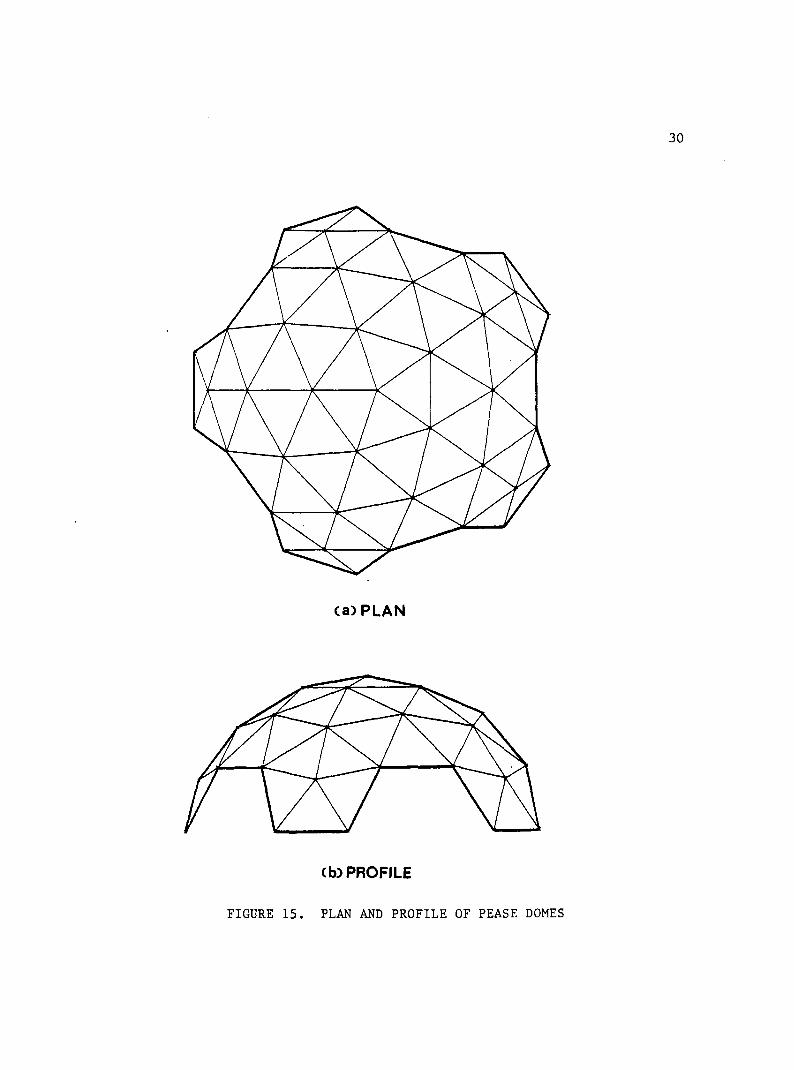
ca) PLAN
(to PROFILE
FIGURE 15. PLAN AND PROFILE OF PEASE DOMES

31
the resulting structure. The remaining dome characteristics were
unique to each structure and will be described separately.
4.1 Dome Test by H.C. Nutting Company
Detail data from tests conducted by the H. C. Nutting Company
are given in reference [5]. In addition to deflections, the report
includes a description of the dome, the testing procedure, and photo
graphs .
Figure 16 shows the assembly drawings for the two basic trian
gle panels used to construct the dome. The framing members were 2" by
2" S4S, kiln dried, construction grade, costal region Douglas Fir.
The frame sheathing was Douglas Fir Plywood Association (DFPA) exte
rior grade overlaid fir plywood, as made by U.S. Plywood Corporation
under the trade name Duraply. The sheathing was 5/16" thick, includ
ing a permanently bonded phenol resin, cellulose fiber sheet attached
to the face. The sheathing material was bonded to the framing members
using a urea-type (URAC 185) glue and HD10DC 1 1/4" staples.
The thirty-nine foot diameter, sixteen foot, three-inch high
structure was assembled in panel dome fashion by bolting the appro
priate panels together in the correct sequence. The frame fasteners
used were 3/8" NC bolts with corresponding nuts and washers. No data
were provided regarding the number of bolts used to fasten the panels
together, or their positioning along the legs of the panels.
As the panels were being bolted together, the steel straps
binding the panels at the vertices were also installed. Shown in Fig
ure 4, the straps are held to the framing members with threaded nails.

14.00
47.906" 95.813
(a) HEXAGON PANEL
12.00'
47.906" »j
95.813"
(b) PENTAGON PANEL
FIGURE 16. PANELS FOR 39' DIAMETER DOME
33
Once the dome had been assembled, the 2" by 4", S4S, Douglas
Fir base plates were secured to the foundation by 3/8" anchor hook
bolts.
After a visual inspection of the structure, during which the
structure's appearance prior to loading was noted, a total of twelve
gauges (0.001 inch accuracy) were placed at the apex and critical
vertices of the dome, to measure vertical and horizontal deflections.
Figure 17 indicates the gauge positions and numbers.
To prevent any slippage of the loading materials, two-by-fours
were nailed around the loaded area perimeter. The uniform load was
applied using standard concrete blocks of known weight that were
distributed over the loaded area as uniformly as possible. The loaded
area, shown in Figures 17 and 18, consisted of the apex of the dome,
bounded by straight lines that connected every other vertex of the
second level, producing a projected horizontal area of 350 square
feet. Uniform loads of thrity, sixty, and seventy-five pounds per
square foot were applied.
After sustaining the full load for approximately twenty-six
hours, the loading material was removed and recovery at the different
load intervals recorded. Tabulated deflections for this test are
given in Table 1.
4.2 Dome Test at University of Arizona
The dome tested by the author was a forty-five foot diameter,
eighteen foot, eight-inch high, Pease panel dome, manufactured by
Domes and Homes of Texas. Figure 19 shows the assembly drawings for

FIGURE 17. LOADED AREA AND FOR 39' DIAMETER DOME
GAUGE LOCATIONS (PLAN VIEW)

FIGURE 18. LOADED AREA AND GAUGE LOCATIONS FOR 39' DIAMETER DOME (PROFILE VIEWS)

TABLE 1.
Time
TABULATED
Load (psf)
DEFLECTION RESULTS
6H
FOR THIRTY-NINE
6V 15H
T FOOT DIAMETER DOME
15V 29H 27bv 27bv 27V 27H 14V 1AH
11/10/59
12:10 PM — -- — -- Dials Set to Zero and Loading Began -- -- -- -- —
1:50 30 -.042 + .010 -.067 -.000 -.047 + .040 -.047 + .008 -.031 + .029 -.048 -.055
4:00 60 -.153 + .012 -.200 -.004 -.122 + .089 -.095 + .020 -.058 + .100 -.101 -.088
11/11/59
8:00 AM 60 -.180 -.008 -.220 + .016 -.130 + .104 -.096 + .051 -.103 +.255* -.102 -.055
10:00 60 -.182 -.005 -.222 + .020 -.132 + .100 -.095 + .055 -.105 + .258 -.103 -.059
12:00 75 -.173 -.010 -.280 + .039 -.150 + .123 -.105 + .080 -.119 + .270 -.130 -.058
1:00 PM 75 -.175 -.011 -.283 + .039 -.150 + .122 -.108 + .080 -.120 + .261 -.131 -.058
2:00 75 -.178 -.012 -.288 + .042 -.150 + .122 -.108 + .086 -.120 + .249 -.133 -.154
3:00 75 -.180 -.015 -.291 + .045 -.153 + .121 -.109 + .094 -.120 + .240 -.131 -.149
4:00 75 -.182 -.016 -.293 + .047 -.154 + .121 -.108 + .099 -.119 + .234 -.133 -.146
11/12/59
12:20 PM 75 -.196 -.029 -.310 + .057 -.165 + .122 -.100 + .149 -.104 + .130 -.149 -.097
2:00 75 -.197 -.028 -.313 + .054 -.170 + .122 -.104 + .143 -.110 + .181 -.152 -.121
R E C 0 V E R Y
3:00 60 -.167 -.018 -.261 + .046 -.158 + .116 -.091 + .136 -.103 + .194 -.135 -.131
4:30 30 -.154 -.012 -.203 + .030 -.135 + .093 -.070 + .124 -.085 + .217 -.113 -.153
6:00 -- -.111 -.006 -.119 + .007 -.092 + .056 -.032 + .101 -.054 + .215 -.064 -.166
11/13/59
4:45 PM - - -.096 -.012 -.078 -.035 -.079 + .036 -.011 + .054 -.010 + .289 -.043 -.200
Percentage Recovery 51.3 58.6 75.1 53.5 70.7 89.9 63.8 91.7 71.7
* Dial gauge support possibly disturbed. V -- Denotes Vertical displacement. H -- Denotes Horizontal displacement. Minus (-) sign prefix denotes dovmward movement for vertical dials and movement toward center of dome for horizontal dials. Plus (+) sign prefix denotes upward movement for vertical dials and outward movement for horizontal dials. T -- Reprinted from the report made to the Pease Woodwork Company by the H. C. Nutting Company [5].

19.00 22.25
15.00 18.25
15.00 *
4~ 18.25" j
15.00"__Jf_
15.00 j r i
20.00
(SUBOIVIOEO DIMENSIONS AS BELOW)
(a) HEXAGON PANEL
8.75"
31.50" ig 75„
. -t-
14.50
19.75"
8.75"
11 13.00" 41.50" 13.00'-! 41.50
34.25- 40.50" ~ 34.25" -
(b) PENTAGON PANEL
FIGURE 19. PANELS FOR 49' DIAMETER DOME

38
the two basic panels used in the construction. The framing members,
shown in cross-section in Figure 20, were bevelled 2" by 6", kiln
dried, construction grade, Southern Yellow Pine. The interior sup
porting members were 2" by 6" lumber of the same grade and species and
were joined to the main framing members with coated sixteen-penny
nails.
The framing sheathing material was the American Plywood Asso
ciation's 5/16" five-ply, C-D grade, interior-exterior, Exposure 1,
plywood. The sheathing material was bonded to the framing members
using a urea-type (URAC 185) glue and 1 1/2" staples spaced every six
inches or less.
Assembly of the dome was achieved by bolting together the
sides of adjacent panels with 3/8" ASTM A307 bolts and corresponding
nuts and washers. A total of four bolts were used to join each side
of one panel to the adjacent one. The locations of the fasteners for
each of the basic panels are shown in Figure 19.
To expedite construction, five or six triangular panels were
assembled to form each vertex, and then these sections were bolted
together to form the completed dome. At each vertex, galvanized steel
straps, as shown in Figure 4, were nailed to the framing members.
Assembly of the dome was completed by anchoring the 2" by 6"
bevelled base plates to bevelled shim plates, placed on the founda
tion, with 3/8" anchor hook bolts. A photograph of a typical footing
is shown in Figure 26.

The final step in construction was to tighten each of the
bolts firmly. After each bolt was tightened, the surrounding wood was
lightly marked with spray paint to insure that none were missed.
Preparations for testing began with the making of sand bags.
Since the loading was to take place in the early summer before the
annual rains, it was felt that heavy-duty paper bags would suffice.
The use of sand bags also made the actual load placement a little
easier due to convenient handling and bag size.
It was decided that a load of thirty pounds per square foot on
a projected horizontal area of 700 square feet would cause enough
measurable deflection to check the results against the different
methods of analysis. In addition, it was the same load that had been
used in the Nutting test [5], and also was a load that could be placed
within the required constraints on manpower and time.
Each sand bag was filled with thirty pounds of sand, and
placed so that it rested on a surface area of approximately one square
foot. The weight of each bag was controlled by first filling the bag
with shovelfuls of sand, and then moving it to a scale where the exact
weight was adjusted manually. For the projected load area, shown in
Figure 21, the total load of the sand bags was determined as:
in# 1 ? Side A : 399 Bags ' — " =• = 34.4#/ft
bag 348.2 ft.
Side B : 403 Bags * — * =• = 34.7/!/ft2. bag 348.2 ft.
Before the sand bags were put in place, preparations for
recording the data were made. To seal the interior of the dome from
the wind, heavy-duty plastic sheets were stapled over each of the

40
4.75"
FIGURE 20. CROSS SECTION OF FRAMING MEMBERS FOR 45' DOME
FIGURE 21. LOADED AREA FOR 45' DOME

41
FIGURE 22. SANDBAGS USED FOR LOADING
FIGURE 23. PLASTIC SHEETS SEALING DOME

42
openings. Shown in Figure 23, the plastic sheets were weighted at the
bottom with sand bags and two-by-fours. Across one of the openings,
two overlapping sheets were used, providing access to the dome in
terior.
From the sixteen nodes indicated on Figure 21, ten-ounce plumb
bobs were suspended using twenty-two gauge, nonbraided steel wire.
Approximately ten -inches beneath each plumb bob, a one-square-foot
table was constructed and leveled. Shown in Figure 24, these tables
provided the reference datum for the vertical and horizontal
deflections.
A reference grid was drawn on the table surface by first
locating the point directly beneath the plumb bob tip. This was
accomplished by first swinging the bob in a gentle arc and tracking
its motion in the reflection of a mirror with a line scribed across
its surface. When the mirror was positioned so that the path of the
tip followed the line, the two end points of the line were marked.
The process was then repeated with an arc normal to the first arc.
The intersection of the two arcs gave the point directly beneath the
plumb bob tip. Since the dome was constructed with a convenient
north-south axis, a northern y-axis and eastern x-axis were estab
lished using the previously defined point as the origin. All data
regarding horizontal movement of the structure were obtained using
this procedure.
Vertical deflections were obtained by placing the same scribed
mirror against a carpenter's square and reading the distance between

43
FIGURE 24. MEASUREMENT REFERENCE TABLES

44
the plumb bob tip and the table surface. The photographs in Figure 25
illustrate the procedures used in the two methods of data collection.
In addition to the plumb bobs, an independent method of measur
ing nodal deflections was provided by using differential leveling from
an outside reference point, and a surveying rod calibrated to 0.005
feet (0.06 inches). After each stage of loading, the plumb bob data,
as well as the surveying data, were recorded.
To check for movement at the footings, a two-foot length of
ten gauge music wire was attached to the panel base plates. In this
way, motion would be detected due to either movement of the footing or
slippage of the base plates on the footing. To gauge any movement, a
one-square-foot table was constructed normal to the music wire. The
set-up, shown in Figure 26, was completed by drawing a horizontal and
vertical grid with the origin coinciding with the projection of the
music wire tip. During testing, no measurable motion of the footings
or base plates was detected.
Prior to loading, two ramps were built to transport the sand
bags to the loaded area. The first ramp weighed 210 pounds and was
positioned over node ten, making an angle with the x-axis of 18° and
an angle with the horizontal of 36°. The second ramp weighed 180
pounds, was position over node 15, and made angles of 18° with the
x-axis and 42° with the horizontal. The ramps and their relative
positions are shown in Figures 21 and 27.
To confine the sand bags within the loaded area, a perimeter
of two-by-fours was constructed around the apex. The two-by-fours
were set on edge and nailed to two-by-two cleats which were nailed to

45
FIGURE 25. DATA RECORDING PROCEDURES
46
FIGURE 26. SET-UP TO RECORD FOOTING MOVEMENT
FIGURE 27. FIRST LOAD RAMP IN PLACE ON DOME
47
the dome. All the cleats and two-by-fours were nailed only to the
triangular section upon which they rested and were not secured or
allowed to protrude onto any adjacent section. In this fashion, each
section was allowed to behave independently of the adjacent one, and
the structure could respond normally. The perimeter forms are shown
in Figures 28 and 29.
To prevent any disturbance to the plumb bobs during the pre
loading construction and during loading, each plumb bob was set into a
cardboard support, placed on the individual table grids, producing at
least six inches of slack in the suspending wires. After each stage
of loading was completed, the supports were removed and the plumb bobs
allowed to come to rest before the measurements were recorded.
Deflections were recorded five times during the test: (1) no
load (initial readings), (2) load on side A, (3) load on sides A and B
(full load), (4) load on side B, and (5) no load (recovery). A period
of approximately twenty-four hours passed between each set of read
ings, allowing the dome to fully settle under each load.
The sand bags were lifted to the loading area by placing five
bags in a cart and then hauling the cart up with a rope passed over a
pulley at the apex, using a truck at the opposite end. Using this
set-up, shown in Figure 30, three men were able to place approximately
seventy-five bags per hour. Working with a two-man crew for all but
two days, the entire test was completed in seventeen days.
During the last stages of loading, some of the plumb bobs were
dislodged at the nodes. Deflection results are presented in Tables
2-3, and where data was lost it has been so noted.
48
FIGURE 28. TWO-BY-TWO NAILING CLEATS
FIGURE 29. TWO-BY-FOUR PERIMETER FORMS

49
FIGURE 30. LOADING THE DOME

TABLE 2. DEFLECTION1 RESULTS FOR FORTY-FIVE FOOT DIAMETER DOME
NODE LOAD ON SIDE A FULL LOAD (SIDES A&B)
NODE PLUMB BOBS SURVEYING PLUMB BOBS SURVEYING
l -0.7813 -1.02 -1.4688 -1.62 2 -0.7188 -0.96 -0.8750 -1.62 3 +0.0625 +0.06 -1.1562 -0.96 4 +0.0312 +0.0G -0.9688 -1.08 5 -1.3437 -1.32 -1.6875 -1.74 6 -0.0625 -0.44 -1.3750 -1.68 7 +0.0312 -0.30 -0.6875 -0.80 8 -1.3437 -1.2C -0.9375 -1.02 9 -0.9375 -0.82 -0.2812 -0.30 10 -0.2500 +0.56 -0.7813 +0.40 11 -0.0625 -0.72 -0.4375 -0.42 12 -0.0313 -0.54 -0.5937 -0.90 13 -0.2187 -0.72 -0.6250 -0.72 14 -0.4687 -0.44 -1.2812 -1.08 15 -0.0625 -0.12 -0.1875 -0.78 16 -0.4687 -0.66 -0.8125 -1.20
T Deflections taken from initial datum. Rebound deflections measured from new datum set after dome was under full load.
* From plumb bob data unless otherwise noted. ** From survey data. + Upward movement. - Downward movement.
Lost plumb bob. Plumb bob disturbed and rehung at full load. Deflection data lost, but rebound still calculable.

TABLE 3. DEFLECTION7 RESULTS FOR FORTY-FIVE FOOT DIAMETER DOME
LOAD ON SIDE B UNLOADED NODE
UNLOADED NODE
PLUMB BOBS SURVEYING PLUMB BOBS SURVEYING REBOUND
l -1.42 -1.02 +0.600** l -1.42 -1.02 +0.600**
2 -1.2813 -1.62 -1.7032 -1.68 +0.2031
3 -0.98 -1.08 +0.5937
4 -1.9063 -1.20 -0.90 +0.1800**
5 -1.1250 -1.20 -0.9375 -0.54 +0.7500
6 -0.98 -0.78 +1.1250
7 -0.7188 -0.72 -0.5838 -0.60 +0.0937
8 -1.0937 -0.90 -0.8125 -0.72 +0.1250
9 -0.5000 -0.54 . -0.4062 -0.60 -0.1250 10 -0.9688 -0.54 -0.7500 -0.90 +0.0313
11 -0.5000 -0.40 -0.3750 -0.42 +0.0625
12 -0.5937 -0.72 -0.4687 -0.66 +0.1250
13 -0.5000 -0.68 -0.4375 -0.60 +0.1875
14 -1.0625 -0.90 -0.9219 -0.78 +0.3593
15 -0.1875 -0.66 -0.0938 -0.42 +0.0937
16 -0.90 -0.72 +0.7500
T Deflections taken from initial datum. Rebound deflections measured from new datum set after dome was under full load.
* From plumb bob data unless otherwise noted. ** From survey data. + Upward movement. - Downward movement.
Lost plumb bob. Plumb bob disturbed and rehung at full load. Deflection data lost, but rebound still calculable.

CHAPTER 5
THEORETICAL ANALYSIS
The four most commonly used methods of analyzing geodesic
domes are:
(1) equilibrium equations applied to analysis of the
three-dimensional truss
(2) classical shell analysis
(3) finite element analysis of the three-dimensional truss/
frame and its panels
(4) shell analysis, using an effective thickness derived from
the geometric and material properties of the framing members,
Depending on the characteristics of the particular dome chosen, some
of the methods are more suitable than others.
Analyzing a geodesic dome as a three-dimensional truss assumes
that the structure distributes load axially through pinned end mem
bers. The stiffness contribution of the panels is therefore ignored.
For hub domes of intermediate frequency, with light flexible panels
that offer no structural contribution, it is intuitively obvious that
this model is adequate. The details of the model fit the structure,
and the analysis can be performed with a small computer program.
If the contribution of the framing members is ignored, then
classical shell analysis can be used to analyze the geodesic dome. If
the dome were built with a very high frequency and had panels that
52

53
were joined continuously across the dome's surface, then this method
of analysis might be chosen. However, it has already been established
(Chapter 3) that geodesic dome behavior can differ substantially from
shell behavior.
Finite element analysis (FEM) is perhaps the most commonly
used method of advanced structural analysis today. The basic concept
of FEM involves discretizing large systems into individual components
or subsystems ("superelements"), mathematically modeling them, and
then reassembling the structure within the bounds of physical equil
ibrium and continuity [17]. In this fashion, very large systems can
be analyzed without overlooking or having to make excessive approxima
tions of the contributions of any of the individual components.
Since the geodesic dome is composed of individual elements, it
is easily modeled using finite elements. The sheathing material can
be represented with constant strain triangles (trim elements) or plate
bending elements, and the framing members modeled using either bar or
beam elements. In addition, the elements can-be mixed in any combina
tion, depending on the characteristics of the particular dome. By
modeling with pinned end bar elements, a three-dimensional truss
analysis is performed, and a classical shell analysis can be approxi
mated by using trim elements or plate bending elements. If the dome
has rigid joints, then beam elements can be used to model the framing,
and end moments will be included in the combinations.
Although the advantages of a finite element analysis are
numerous, the method has some limitations in its application to geo
desic domes. The computer programs that are readily available are
54
based on linearly elastic analyses. However, the Pease geodesic dome
is constructed of wood, an anisotropic material. As a result, several
approximations and assumptions have to be made before the geometric
and material properties can be entered. Also, the finite element
method assumes continuity of deformation and equilibrium of the forces
at the joints. This does take place in a hub dome, but is
questionable in a Pease panel dome.
Readily available finite element programs do not have the
capability of modeling a Pease panel dome in the same manner as it is
constructed. However, in spite of these limitations, it might be
possible to modify the input data in a rational manner so that realis
tic results are obtained.
Before finite element analysis became a commonplace method of
advanced analysis, designers of reticulated shells pursued analyses
derived from classical shell solutions. The approach centered around
deriving an effective shell from the material and geometric properties
of the framing members. In particular, the moment of inertia, length,
modulus of elasticity, and cross-sectional area were used as parame
ters. All of the formulas have been developed by equating beam and
shell theory, leading to equations which are checked through testing
of scale models, or by studying actual dome failures.
Although this approach is in use today, its application to
geodesic domes has not been well established. The method incorporates
the stiffness of the framing members in the computations, but still
relies on classical shell analysis to determine the behavior. In
other words, the approach assumes that loads are transmitted primarily

by membrane action. In the case of hub domes with nonstructural
panels, the load is carried by the framing members, and this method of
analysis would be in error. Some of the research work [2] has includ
ed bending to compensate for asymmetric loading. The application of
these approaches to Pease panel domes may have some merit since the
transmission of loads in these domes is unclear.
Before applying this method of analysis to geodesic domes, it
is necessary to discuss its development. The method has been derived
to estimate the ultimate loads on reticulated shells. However, the
subject of dome frequency appears to have been ignored in these
studies. It has been pointed out in the previous chapter that a
geodesic dome will come closer to resembling a shell as its frequency
increases. Thus, applying the developed formulas to any one specific
dome is speculative without first checking the formulas through full-
scale tests.
In this study, Pease panel domes have been analyzed with
finite element models that incorporate all of the readily available
elements, as well as elements that have properties derived from modi
fied shell analysis. Specifically, the conventional element models
include: (1) bar elements, (2) bar elements with trims, (3) beam
elements, (4) beam elements with trims, and (5) trim elements.
The modified shell analysis was performed with constant strain
triangles having thicknesses derived from the equations provided by
Wright [2], McCutcheon and Dickie [9], and Kloppel and Schardt [18].
The decision to use trim elements over plate bending elements was
arrived at after reviewing the test data in tables 2-3. The wood

56
structures did not appear stiff enough to warrant the use of plate
bending elements.
Modeling a wood structure as a linearly elastic, isotropic
material required some assumptions and approximations of the input
material properties. The computations for each model were performed
using the SAPIV Structural Analysis Program, developed at the Univer
sity of California, Berkeley [19], and the data were tailored to meet
the input requirements. The material parameters required by the
program include a modulus of elasticity for the bar elements, a modu
lus of elasticity and a Poisson's ratio for the beam elements, and
three elastic moduli, three Poisson's ratios and a shear modulus for
the trim elements.
Wood is an orthotropic material which has independent mechan
ical properties for each of its three mutually orthogonal axes [20].
Figure 31 shows the three principal axes in relation to the grain
direction and the growth rings of the wood [20]. To describe the
elastic properties of wood completely, twelve constants are required:
three moduli of elasticity, three shear moduli, and six Poisson's
ratios [20],
The three moduli of elasticity are designated E , E^, and E^,
where the subscripts indicate the axis of loading. For the bar and
beam elements, it was assumed that the primary load effects were
directed along the longitudinal axis, and the corresponding modulus of
elasticity was entered.
The moduli of elasticity for plywood are dependent on the
direction of the plies [21]. Direct calculation of the three moduli

57
RADIAL (R)
TANGENTIAL (T)
LONGITUDINAL CL)
FIGURE 31. PRINCIPAL AXES OF WOOD
for plywood was impossible with the data provided, and an alternative
approach was therefore used. To be conservative, it was assumed that
only one half of the plies would carry the stresses in any one direc
tion, and whatever contribution the remaining plies provided was
ignored. Thus, all three required moduli of elasticity for the con
stant strain triangle were made equal to the longitudinal modulus of
elasticity, and the panel thickness was cut in half.
The three shear moduli are designated G , G , and G , where LK LI KX
the subscripts indicate the plane of strain. From Figure 31, the
plane of interest for the constant strain triangles is the LT plane,
and this value of the shear modulus was entered.

The six Poisson's ratios are designated ^LR' ̂ LT'
M^, and where the first subscript indicates the axis of the
applied stress and the second indicates the axis of deformation. For
the beam elements, the loads are assumed to be longitudinal, and the
Poisson's ratio therefore was computed as the average of and Mo
using the assumption that only one half of the plywood's plies provide
the stiffness in any particular direction, the values of Poisson's
ratio for the constant strain triangle were also entered as the
average of and
The deflection results for the five different finite element
modeling schemes of the Pease panel dome are presented in Figures 33
through 38. Figures 33 and 36 illustrate the two domes that were
modeled using pinned end bar elements (three-dimensional truss case),
and bar elements with constant strain triangles. Figures 34 and 37
give the results for the beam and the beam with constant strain tri
angle models for the forty-five foot and thirty-nine foot diameter
domes respectively. The results of the constant strain triangle
models (Shell Analysis) are presented in Figures 35 and 38.
Input data for the models representing the modified shell
analysis were the same as for the constant strain triangles, above,
with the exception that the thickness of the panels was determined by
the formulas given in the following. These are taken from several
studies [2,9,18].
In Wright's development [2], the equations of bending for a
curved member are related to the bending of a shell, culminating in

(a) PLAN
(b} PROFILE
FIGURE 32. DOME NODAL POSITIONS

1 x10-1
9
8
7
6
5
BAR 0---0 BAR. and TRIM 0----0
.. --·---- ~--- - -----. _l
1----------1--------- --------- -
- ----+--------------- - -
I I
\ \ \ - J ___ -
I - -- -- - --------, --
• I I I
-- --- -~ - ~ .. J--l\ I \ I I \ I \ I
I \ I \ I
i \l \~
\ \ \ \
~ q )!) \ I \ I \ I \ I (6 \ I
\ I
t!J
7 8 9 10 11 2 3 4 1 6 5 16 15 14 13 12
NODAL POINTS
FIGURE 33. DEFLECTION RESULTS USING BAR ELEMENTS AND BAR WITH TRIM ELEMENTS TO MODEL 45' DOME
60

61
BEAM © © BEAM and TRIM © -©
1x10
UJ
LL
r2 1x10
NODAL POINTS
FIGURE 34. DEFLECTION RESULTS USING BEAM ELEMENTS AND BEAM WITH TRIM ELEMENTS TO MODEL 45' DOME

62
TRIM 0—0
1x10
UJ
UJ
1x10 9 10 11 2 3 4 1 6 5 16 15 14 13 12 7
NODAL POINTS FIGURE 35. DEFLECTION RESULTS USING TRIM ELEMENTS TO MODEL 45' DOME

2 1---- ----· - - · · ·· ·
---·------
8 -- --~ --··-- ·- -------- - - --
6 1------· ---- - - - · · · ·-- · · .
4 1---------- ------- • ··
BAR 0--0 BARandTRIM 0----0
'L - \-
\
0 " 1-------------- - · ---- - ---- - ·- ---- - -
2
-3 1x10
_..,
1 6 15
NODAL POINTS
14
FIGURE 36. DEFLECTION RESULTS VSING BAR ELEMEKTS AND BAR WITH TRIM ELEMENTS TO MODEL 39' DOXE
27
63
z 0 -.... (.)
1 8
6
4
2
BEAM' 0--0 BEAMandTRIM 0----0
-------- -- - - -- ····- -----·- · ··--·· . ·· - . ---- --·-- - - .
------ ---·--- ... -------- · ------------ . . . - -- - . ·-· -
----- ----- ·---· --- - - ·· · · ·- -- - --- -
1.x10-1 0------q 8
- - --------------\-- - - · ------ -- - -- - -- \ " --
~----------
6 -------------·-·· _ __ _ \ --- -- - ------ - -- - \
\ ·-- ----------,-4
w ; 2 _J ~---------- -- ---u.; w c
1 x102 ....,._ ___________________ ___.:~-----
8 6 1---------·-- ... --- ---- - ------- -
4 - ------
1------- -- -- - -
2 .,__ ____ _
-3 1x10
1 6 15
NODAL POINTS
14
FIGURE 3 7. DEFLECTION RESULTS USING B L-'0-f AND BEAM WI7H TRIM ELEHINTS TO MODEL 39 ' DOME
\ \
\
b
27
64

TRIM 0----0 1
.. - . ~ - - - - - ·- . · ------ ---- ---·------·----~--- ----- - -
8 +----- ---· ·----------- ------ -J------ ------ ---- ·---- . ------------ -----· - - .
6
4
2 1--------~.-------------- - - · ···- - - .
- - - - - - ~ i I -- - - ---- - - - -- - ~
I !
1x10-1 r------------~----~--------------~---------~ .-. (/'J w z (.)
8
6 -_,
I I z
.:. z 4 -- -- ----- - ----- - -·· -·- . - - - -- ! 0 1----------------------- -- - i ~ ; u I
~ ' 2 ~---------------------------~-----i LL w 0
1 X 10-2
8
6
4
2
r---------------------------------------~~-----
1x103~-r--------~--------~--------~--------~~~ 1 6 15
NODAL POl NTS
14 27
FIGURE 38. DEFLECTION RESULTS USING TRIH ELEMENTS TO HODEL 39' DO~!E
65

the effective thickness equation:
t' = 2/T./T7T d9)
where I is the moment of inertia, and A is the cross-sectional area of
the framing members. Substituting for the representative parameters
from the two test domes, t1 = 4.75 inches for the forty-five foot
diameter dome, and t' = 1.63 inches for the thirty-nine foot diameter
dome.
McCutcheon and Dickie [9] have derived an effective shell
thickness formula after examining model studies of 225 foot diameter
domes designed in western Canada. They concluded that domes are much
stiffer under symmetric loading than that predicted by Wright. Work
ing from a basic shell buckling equation, the effective shell thick
ness is given as:
t' = 2.4 3JI/L' (20)
where I is the moment of inertia, and L is the length of the framing
members. For the forty-five foot diameter dome, this yields t' = 1.52
inches, and for the thirty-nine foot diameter dome, t' =0.56 inches.
This represents reductions of t' of 68% (forty-five foot dome) and 66f-
(thirty-nine foot dome) when compared with the results using equation
(19).
Prior to the work of Wright and McCutcheon and Dickey, Kloppei
and Schardt [18] developed an effective thickness equation on the
basis of their studies of framed domes. Their equations is:
, _ ifT . A 3 L ( 2 1 )
where A is the cross-sectional area and L is the length of the rrar.ir.e

67
members. This gives values of t1 = 0.16 inches and t' = 0.07 inches
for the forty-five and thirty-nine foot diameter domes, respectively.
In other words, equation (21) predicts a significantly higher stiff
ness than that obtained by equations (19) and (20).
The thickness of the constant strain triangles used in the
conventional finite element models was 0.250 inches for the forty-five
foot diameter dome and 0.156 inches for the thirty-nine foot diameter
dome. This is in semi-rational agreement only with the results of
equation (21).
Figures 39 through 42 illustrate the deflection results that
were obtained using the three effective shell thicknesses. Figures 39
and 40 show the results for an asymetric loading of the forty-five
foot diameter dome (see Figure 21), and Figures 41 and 42 depict
symmetric loading on both the forty-five foot and the thirty-nine foot
diameter domes.
The finite element meshes, numbering schemes, and nodal coor
dinate data for the two domes are shown in detail in Appendix B of
this report. A complete discussion of the results and how they corre
late with the experimental data will be provided in the next chapter.

I
68
* Node 4 had upward movement t= 0.157 inches © —0 and has not been plotted. t= 1.523 inches © ©
t= 4.750 inches ©
1x10
iu
u_ LU 0-
1x10
.-4 1x10
NODAL POINTS
FIGURE 39. DEFLECTION RESULTS OF 45' DIAMETER DOME MODELED US TNG TRIM ELEMENTS OF VARIOUS THICKNESS (ASYMMETRIC LOADING, SIDE A)'

69
* Node 5 had upward movement tss 0.157 inches 0- Q and has not been plotted. ts 1.523 inches 0 0
t= 4.750 inches 0
1x10
UJ
2 1x10
UJ -j u. UJ
1x10
,-4 1x10
1x10
NODAL POINTS
FIGURE 40. DEFLECTION RESULTS OF 45' DIAMETER DOME MODELED USING TRIM ELEMENTS OF VARIOUS THICKNESS (ASYMMETRIC LOADING, SIDE E)

70
t= 0.157 inches O O t= 1.523 inches ©< t= 4.750 inches ©-
O-AYO-CY-O-Q
1x10
UJ
u_ LU
1x10
1x10 9 10 11 2 3 4 1 6 5 16 15 14 13 12 7
NODAL POINTS
FIGURE 41. DEFLECTION RESULTS OF 45' DIAMETER DOME MODELED L'SINT
TRIM ELEMENTS OF VARIOUS THICKNESS (SYMMETRIC LOADING, SIDES A AND

ts0.066 inches O O t = 0.559 inches O* O t= 1.625 inches Q.
O-
1x10
—
x 1*10
2 ' W z o h o UJ -j UL UJ D
1x10
1x10 14 27 15 1 6
NODAL POINTS
FIGURE 42. DEFLECTION RESULTS OF 39' DIAMETER DOME MODELED I 'STN
TRIM ELEMENTS OF VARIOUS THICKNESS (SYMMETRIC LOADING)

CHAPTER 6
COMPARISON OF THEORETICAL AND EXPERIMENTAL RESULTS
Figure 43 shows the results from the forty-five foot diameter
dome test. Presented in the graph are the deflections under full
load, as indicated by the plumb bobs and the surveying. The rebound
or "recovery" deflections have also been included.
There is a reasonable correlation between the survey measure
ments and the plumb bob data. At node 5 the two curves come closest
to matching, with the two values differing by only 3.0%. At node 15,
however, the data differ by 76.0%. Overall, the mean difference
between the two curves is 20.7%. This is derived from the absolute
difference of each of the points, since at some of the nodes the
surveying data curve lies above that of the plumb bob data, while at
other nodes it lies below.
The variation in the two curves comes from error inherent in
the two methods of data collection. As was noted in Chapter Four,
once the structure was under load, some of the joints underwent enough
movement to dislodge the evebolts holding the plumb bobs. Although it
is theoretically possible that some of the plumb bobs could have
slipped a little without coming completely free, it is felt that this
did not take place for two reasons. First, the plumb bobs only
weighed ten ounces. This is not enough for the plumb bobs to pull
free under their own weight. Second, the evebolts used had capered

73
* Survey data used for rebound curve. MAX. DEFLECTION © O ** Not plotted, Node 9 had upward REBOUND 0~~~0
aenection, and negative rebound. SURVEYING 10
1x10
UL
1x10
1x10
NODAL POINTS
FIGURE 43. PLUMB BOB DEFLECTION'S, REBOUND, AND SURVEYED DEFLECTIONS FOR THE ,5 ' DOME

74
screw ends. If the joints underwent movement that allowed for slip
page, the joint would be widening while the eyebolt diameter would be
decreasing. Thus, during the settling of the structure under load,
the plumb bobs would either have dropped out completely or not at all.
A more reasonable source of the variation comes from the
surveying. In particular, the rod placement is probably responsible.
The mean variation of 20.7% applied to the maximum deflection of 1.7
inches is only 0.35 inches. This could easily come from a slight
misplacement of the rod at the joint, particularly since some of the
members at a joint may be moving independently of the other members
intersecting at the joint. This is undoubtedly taking place or other
wise the space created allowing the plumb bobs to dislodge could not
have been formed.
Conclusions drawn from the comparison of theoretical and
experimental data will be based on plumb bob readings wherever pos
sible. At the points where data from the plumb bobs were lost, sur
veying data has been substituted and is so indicated on the plots.
Also, as mentioned in the previous chapter, only vertical deflections
will be evaluated as an indicator of the dome behavior. They are
significantly greater than the horizontal deflections, and as such,
will be affected less by any experimental error.
The rebound curve shown in Figure 43 contains the most useful
information. Due to constraints on manpower and time, it was impos
sible to preload the structure before testing. For this reason, the
maximum deflection readings presented in Figure 43 cannot be taken as
the actual deflections the structure would undergo if leaded again.
75
The rebound deflections, on the other hand, represent the amount of
deformation that the structure recovered after being unloaded. The
deflections expected under a repeat loading may be approximated by
these values. Depending on the joint condition, the rebound values
therefore are used in the comparisons with the deflections predicted
by the computer modeling.
Figure 44 shows the maximum deflection and the rebound curve
plotted along with the results of the five finite element models for
the forty-five foot diameter dome. Of the five models, only the trim
model has a shape that is truly inconsistent with the test data. This
inconsistency is best seen at the apex and nodes 14 and 15. The apex
of the bar and beam models, whether trims were included or not, show a
definite peak indicating a point of maximum deflection. The trim
model shows no peak whatsoever. In fact, the trim model predicts
virtually uniform deflection at the apex and the five surrounding
nodes. This is inconsistent with the test data.
A larger variation between the trim and other models is seen
at nodes 14 and 15. The deflection at node 14 is less than the
deflection at 15 on the trim model, but the reverse is true for the
other four models, and for the test data. Apparently for this dome,
with its frequency and diameter, the load is being transmitted
primarily by the framing members and not by membrane action through
the panels.
The most significant observation that can be made from the
theoretical and test data is the nearly one order of magnitude differ
ence in the deflection. Although the shape of the curves seer.s

76
MAX. DEFLECTION G— —0 REBOUND 0— —0 TRIMS O—• —O BARS WITH TRIMS CD-- - -• BEAMS WITH TRIMS £r- — - -A BARS CD • BEAMS A— A
8
4
1x10 W 8 LU
o UJ -J u_ UJ Q
-1 1x10
8
6
4
-2 1x10
-q, 1m.
/Ax /-̂ sx /' S.S • '̂ 2̂ \ /
V I
I I -1 I • 1 I I 7 8 9**10 11 2 3 4* 1 * 6 5 16 15 14 13 12
NODAL POINTS
FIGURE 44. DEFLECTION DATA FOR THE 45' DOME PLOTTED WITH THE FIVE FINITE ELEMENT MODELS

reasonable, there is a large discrepancy in the values. The rebound
curve is closer to the predicted values with a mean difference of
69.4% from the bar and beam models around the loading ramps, but
having a mean separation of 82.3% around the apex.
Of particular interest is the nodal points where the loading
ramps were placed. . These two points, nodes 10 and 15, show the least
rebound deflection of all the nodes monitored, and they come closest
to falling within the range of the theoretical results. During load
ing, these nodes were subjected to repeated applications of 160 pounds
(the weight of 5 sand bags and the loading cart) as well as any load
contributed by the man unloading the cart (approximately 150 pounds).
A superficial examination of the test data would suggest that
the dome is a much softer structure than the computer analysis indi
cates. With the deflections being far in excess of those predicted by
the theoretical analysis, this appears to make sense. However, obser
vations of the rebound curve suggest that this is not so. The rebound
curve lies closer to the theoretical curve than the maximum deflection
curve but, in particular, the two nodes that received the most load in
the structure have rebound deflections small enough that they lie
closest to the theoretical data. In other words, it appears that due
to this dome's structural details there exists enough free space in
the panel corners to allow either individual pieces of the structure
or complete sections to undergo rigid body translations of an inch or
more before the pieces or sections redistribute their load.
Further confirmation for these rigid body translations can be
found by examining the apex portion of either the maximum deflection

curve or the rebound curve. Theoretically, the apex should undergo
the most deflection, and the five adjacent nodes deflecting a uniform
but slightly smaller amount. The curves indicate movement approximat
ing this, but in a far more haphazzard pattern.
If the members or the panel section corners that intersect at
a node are allowed to undergo independent rigid body translations,
then it can no longer be expected that there will be a continuity of
deflection for all members at a joint, or for all the joints that
occur at the same level. Thus, the occurrence of gaps that allowed
some of the plumb bobs to fall, and the discrepancies between the
surveying and plumb bob data. It is important to note that once the
structure is placed under enough load to eliminate the rigid body
translations, it appears to match the behavior of the appropriate
computer model.
In Figure 45 the maximum deflection and rebound curves are
plotted, along with the results of the five finite element models for
the thirty-nine foot diameter dome. For this dome, all five finite
element models are in close correlation with the test results. Once
again, the apex and nodes 14 and 15 reveal the most useful observa
tions .
Theoretically, the apex node should undergo the most deflec
tion. However, in this case, neither the maximum deflection curve nor
the rebound curve indicate this. There are two possible reasons for
this. One, that there was an error in the data collection, or two,
that the method of loading allowed for neighboring nodes to undergo
translation first. The latter appears to be the most reasonable, and

i I 8 :
s ;
4 .
2 .
•1
8 :
6 !
4 .
2 .
•2
8 :
6 !
4 .
2 .
•3
79
MAX. DEFLECTION 0 O REBOUND O O TRIMS O— BARS WITH TRIMS EL • BEAMS WITH TRIMS <£> & BARS • • BEAMS A A
"~t 1 H-15 14 27
NODAL POINTS
FIGURE 45. DEFLECTION DATA FOR THF 39' DOME
PLOTTED WITH THE FIVE FINITE ELEMENT MODELS

80
it is confirmed by the observations made of the forty-five foot
diameter dome.
If loading proceeds from the lower nodes up to the apex (as in
the forty-five foot dome), it is realistic to conclude that any rigid
body translations taking place in the structure will follow the same
pattern. Therefore, the apex node will be the last node to stiffen,
and thus have less translation, resulting in a smaller deflection.
The data provided for the thirty-nine foot diameter dome did not
include enough data points or a more detailed description of the
loading procedure to permit a detailed examination of this relation
ship. The data in Figure 45 show that the results of the framing
member models and the membrane action model exhibit the same shape as
the test data. In the forty-five foot dome, nodes 14 and 15 showed a
sharp contrast with the two load distribution models, but none exists
for this dome. The inclusion of more test points may have resolved
this, but it may be an indication that for this dome's diameter and
frequency, a balance has been reached between the load carrying action
of the framing members and the panels. It is unwarranted at this
stage to form any firm conclusions about this, given the number of
other uncertainties that are inherent in the panel dome's construction
details.
At node 27 there is a large deviation from the predicted
behavior. Referring to Figures 17 and 18 that show the node posi
tions, it can be seen that this node lies at one of the corners of an
opening. The relatively small difference between the maximum
81
deflection curve and the rebound curve (12.4%) suggests that vertical
rigid body translation is not taking place.
A geodesic dome normally distributes load compressivelv
through its radial members that lie along the great circles, and then
redistributes the forces in a tensile manner through the meridian
members at each level. Apparently at locations were there is a dis
continuity in the structure, like an opening, the radial framing
members undergo greater translation in the horizontal direction than
expected, thus transmitting most of their load into the meridian
members at that level.
If the nodes were fully constrained, a greater portion of the
compressive loads would be transmitted vertically, and greater verti
cal deflections would result. The fact that this does not appear to
be taking place indicates enough slack exists at the nodes so that the
individual members can move independently.
The most significant observation that can be made from the
thirty-nine foot diameter dome data regards the overall closeness of
the theoretical and test deflections. Unlike the author's test data,
the results for this dome lie well within the range cf the predicted
results. Also, the rebound curve has a mean separation from the
maximum deflection curve of only 34.0%.
It appears that in the thirty-nine foot dome, the large rigid
body translations that took place in the forty-five foot dome do not
exist. This seems unlikely. Given that the domes are identical in
every respect except the diameter, the slack at each of the nodes and
the bolted connections should be approximately the same ir both.

Since the thirty-nine foot dome was loaded with significantly more
weight than the forty-five foot dome (75 PSF versus 34 PSF), it would
be expected that the maximum deflection curve would lie even further
above the rebound curve than for the forty-five foot dome. At the
same time, the rebound curve would be pushed lower, toward the theo
retical curves. Only the latter actually takes place.
The most reasonable explanation for this is that the thirty-
nine foot dome was preloaded in some fashion before testing. In the
report made to the Pease Woodwork Company [5], from which this test
data are taken, no mention is made as to whether this took place or
not. The alternative solution is to assume that the dome was erected
in such a fashion that the slack was removed at all the connections,
producing a structure that was much stiffer than the author's. How
ever, the description given in the report regarding erection and
materials appears close enough to the author's to make this unlikely.
After examining the data for both domes, it has been concluded
that with sufficient preload applied, all joint settlements will be
removed. The dome's subsequent structural behavior will generally
follow that of the computer models. The question that still remains
to be answered is which model provides the best results.
Examination of Figures 44 and 45 reveals that modeling with
bars, bars and trims, beams, and beams with trims, produce deflection
results that vary in degree only. In other words, all four of these
models produce curves that are identical in shape, but each represent
a structure of different stiffness. Of the four models, bar elements
appear to give the most accurate representation. It can therefore be

83
concluded that the necessity of including fixed ends, or the addi
tional stiffness of the panel elements, into the model is not
required. This may have significant practical implication.
Apparently, a panel dome that distributes load primarily with
its framing members does so in a manner much like a three-dimensional
truss. . Once the slack has been removed from the structure, the com
pression members that meet at a node butt against each other, trans
mitting load, and the tensile members that meet, effectively transmit
load through the steel straps provided at each joint.
It should be noted that while the bar element model provides
the best representation of vertical deflections for a Pease panel dome
that distributes load with its framing members, it disregards the
flexural stresses induced in the framing members by load applied along
their length. The most satisfactory solution can be achieved by using
pinned end beam elements. With this model the relative stiffness of
the bar element model can be kept, while the flexural action of the
applied end moments can also be included.
The trim model that represents load distribution through
membrane action was deemed unacceptable for the forty-five foot dome.
However, the thirty-nine foot diameter dome's deflection curves
correspond to the trim model's. The modified shell analysis relied on
the development of an effective shell thickness to represent the
dome's behavior and was modeled using trim elements. The deflection
results for the modified shell analysis, the original crirc model, and
the test results for the thirty-nine foot dome have been plotted in
Figure 46.

84
Of the three modified shell thicknesses, only the value cal
culated using Kloppel and Schardt's [18] formula gives a curve that
falls within the test data range. The results of the remaining two
thicknesses give deflections that are too small to be realistic. It
was assumed in Chapter Five that the use of plate bending elements
would give an even stiffer representation for the modified shell
analysis than the trim elements. It was therefore decided that this
model would be ignored, even though plate bending theory was used in
the development of the formulas. This assumption now appears valid.
In much the same way that the beam element model gave results similar
to the bar element model, only stiffer, it is assumed that the same
things would take place with the shell elements.
Examination of the curves in Figure 46 also reveals that the
use of the actual panel thickness, instead of Kloppel and Schardt's
derived thickness, yields acceptable results when compared to the test
data. This is due to the closeness of the effective and actual panel
thicknesses.
An evaluation of the performance given by each of the effec
tive shell formulas in response to asymmetric loading cannot be
obtained with the available data. Although measurements were mace
while the forty-five foot dome was subjected to asymmetric loading, no
rebound data was collected until the structure had been completely
unloaded. Given the requirement that the structure must be adequately
preloaded before the deflection values prove to be reliable, the best
that can be hoped for would be a match in the shape of the theoretical
and test curves. In this case, however, all three theoretical curves

85
MAX. DEFLECTION El • t=0.066n O O
REBOUND El "G t= 0.559" O O ORIGINAL TRIM £> A t= 1.625" G>
1x10
V—
-2
O z
z o H-o UJ -j u_ LLI Q
-3 1x10
27 15 14 1
NODAL POINTS
FIGURE 46. DEFLECTION DATA FOR 39' DOME PLOTTED WITH THE THREE MODIFIED SHELL MODELS

have the same shape (Figures 40 and 41). What must be determined is
whether the stiffness of the dome changes enough to warrant recommend
ing a curve different from Klbppel and Schardt's to predict the struc
tural behavior. The forty-five foot dome's behavior does not seem to
follow the membrane action model. This is the one that the effective
shell models are related to. In order to form a reliable evaluation
of this concept, deflection data from an asymmetric loading of a dome
that distributes load primarily through membrane action is required.
A careful examination of the theoretical and experimental data
for the thirty-nine foot dome (Figure 46) reveals that although the
shape of the trim element curves match the test data, some of the
points deviate a fair amount. Point 27, in particular, does not seem
to match, and a possible explanation for this has been given above.
Further examination of Figure 46 reveals that the test results for
nodes 1 and 6 fall equally within the range of the predicted results
for the other models. As mentioned briefly above, this could be an
indication that this dome is distributing load through both the panels
and the framing members instead of primarily through only one of the
systems.
If this is the case, then it would be valuable to relate this
dome's frequency and size to a convenient number so that an estimate
of what constitutes the dividing line between shell and truss action
can be identified. The chord factors developed in Chapter Three are
not sufficient, since the two domes tested were of identical fre
quencies, but still behave differently. It might be suitable to
87
relate the area of a panel to the dome's overall diameter to achieve
this correlation.
The problem can be further simplified by assuming that all of
the faces are equilateral triangles. Calculation of the area of one
of the panels can be approximated as:
2 A = % (Average Chord Factor x Radius) . (22)
Applying this to these two domes would yield an area for the thirty-
nine foot dome's panels of 28.65 square feet, and 38.14 square feet
for the forty-five foot dome. If these two numbers are then repre
sented as percentages of their respective diameters, the percentages
arrived at are 73.5% and 84.8%.
For two domes that are the same in every respect but size, a
method has now been provided to gauge how close the dome comes to
behaving as a sphere. The lower percentage (achieved by increasing
the frequency or decreasing the diameter), the more shell-like the
structure becomes.
Obviously the proposed method is highly empirical and is based
on limited test data, but the fact remains that depending on how a
dome is developed, it can behave either as a shell or a truss or as
something in between. The proposed method shows how the actual struc
ture can be evaluated, and thus provides practically useful criteria.

CHAPTER 7
SUMMARY AND CONCLUSIONS
The purpose of this study has been to gather load and deforma
tion data for the Pease panel dome, and to develop a reliable method
of structural evaluation. From the two full-scale tests analyzed in
this report and the results of the various computer models, the fol
lowing conclusions can be given:
1. The structural detailing of the Pease panel dome contains
enough slack in the joints for either individual pieces
of the structure or complete sections to undergo rigid
body translations of an inch or more before redistribut
ing load.
2. Once the structure has been given an adequate preload,
compression members intersecting at the joints will
transfer load through direct contact, and tensile members
will distribute load through the steel straps provided at
the joints.
3. From the computer models investigated, a pinned-end beam
finite element model is recommended for analyzing the
Pease panel dome that distributes load primarily though
its framing members. The model provides the flexural
data required for designing the framing members, and also
emulates the structure's three-dimensional truss action.
88

4. For Pease panel domes that distribute load primarily
through membrane action, a constant strain triangle
(trim) model is recommended. The thickness of the trim
element used should be as calculated with the formula
provided by Kloppel and Schardt [18].
5. In determining the dividing line between load distribu
tion through framing members or membrane action through
the panels, it is recommended that the area of a single
panel be looked at in relation to the overall size of the
dome. The method proposed in this report (equation 22,
etc.) develops a ratio between the average panel area and
the dome diameter.
Two points have been bought out in this study that should be
further investigated. The first deals with asymmetric loading. Three
methods of modified shell analysis have been discussed, and it was
noted that the loading pattern played a role in their development.
The only dome that was subjected to asymmetric loading, however, did
not distribute load through membrane action and was therefore not
suitable for use in evaluation of the different formulas.
The second point concerns the identification of the geometric
characteristics that make a dome perform as either a three-dimensional
truss or a shell. The method proposed here is based on limited test
data. The development of a more refined and tested technique would be
of value to dome designers.
89

APPENDIX A
CHORD FACTORS AND RELATED INFORMATION FOR VARIOUS POLYHEDRONS
AND FREQUENCIES DEVELOPED USING THE CLASS I METHOD
90
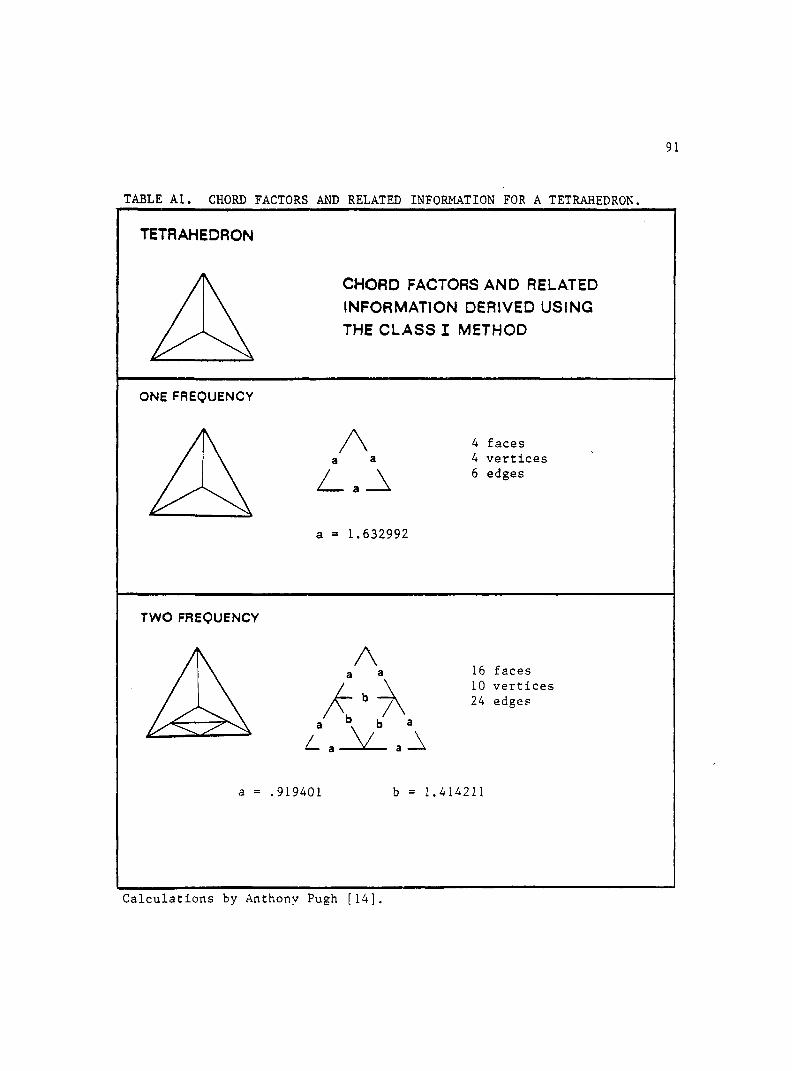
91
TABLE Al. CHORD FACTORS AND RELATED INFORMATION FOR A TETRAHEDRON.
TETRAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
ONE FREQUENCY
A a a
Z_, A a = 1.632992
4 faces 4 vertices 6 edges
TWO FREQUENCY
A a a
b a
16 faces 10 vertices 24 edges
a = .919401 b = 1.414211
Calculations by Anthony Pugh [14],

TABLE A2. CHORD FACTORS AND RELATED INFORMATION FOR A TETRAHEDRON.
TETRAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
THREE FREQUENCY
A b c c b
a b c c b a L. a-̂ b a
36 faces 20 vertices 54 edges
a = .509138 b = .853001 .977847
FOUR FREQUENCY
A a a
d e e d
Are e"^v d e f f e d
£ C - X - F -x-cjx a b c e e c b 3
d d -X- a ±
64 faces 34 vertices 96 edges
a = .337424 b = .577350 c = .517045
d = .605812 e = .765367 f = .999998
Calculations by Anthony Pugh [14].

TABLE A3. CHORD FACTORS AND RELATED INFORMATION FOR A TETRAHEDRON.
TETRAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
SIX FREQUENCY A a a
d e e d
ar* "x"e "x e g f f g 8
e f h j j h f e
a9 # i.^fl \ a e f h j J h f e d
aT c-)ff C"X a b c e g f f g e c b a I— a d e e d a
144 faces 74 vertices 216 edges
a = .194934 b = .342998 c = .248791
d = .314152 e = .436954 f = .459500
g = .335397 h = .632457 j = .671424
Calculations by Anthony Pugh [14].

TABLE A4. CHORD FACTORS AND RELATED INFORMATION FOR A HEXAHEDRON.
HEXAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
ONE FREQUENCY
a = 1.157362
A b b
Z_ a A 24 faces 14 vertices 36 edges
b = ,919402
TWO FREQUENCY
A c c
b e
96 faces 50 vertices 144 edges
a = .605811 b = .533266
c = .473130 d = .650115
Calculations by Anthony Pugh [14].

TABLE A5. CHORD FACTORS AND RELATED INFORMATION FOR A HEXAHEDRON.
HEXAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
THREE FREQUENCY
a = .381642 b = .458831 c = .369777
A e e
/r '"X h 9 g h
kj f-\ e d c c d e
l a^z baz. all
d = .345108 e = .305593 f = .437710
2 1 6 faces 110 vertices 324 edges
g = .342890 h = .340067 j = .427099
FOUR FREQUENCY
a = b = c = d = e =
.274774
.338201
.279081
.268070
.250832
A f f
A t I n n I
• k j j k I
/<r9-*-hX"9jX f e d c c d e f
L- a V b b a A
f = g = h = j = k =
.223925
.313678
.351406
.275377
.259338
384 faces 194 vertices 576 edges
1 = m = n = P =
.252585
.329564
.245520
.314678
Calculations by Anthony Pugh [14].

96
TABLE A6. CHORD FACTORS AND RELATED INFORMATION FOR AN OCTAHEDRON.
OCTAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
ONE FREQUENCY
8 faces 6 vertices 12 edges
1.1414213
TWO FREQUENCY
32 faces 18 vertices 48 edges
.765367 1.000000
Calculations by D. Andrews and A. Steinbrecher [22].

97
TABLE A7. CHORD FACTORS AND RELATED INFORMATION FOR AN OCTAHEDRON.
OCTAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
THREE FREQUENCY
a = .459507
aAa
X-b-X b c c b
ar°^-c-\ a b c c b a
L a-̂ Z. a A
b = .632456
72 faces 38 vertices 108 edges
c = .671421
FOUR FREQUENCY
a = .320365 b = .447214 c = .438871
aAa 1 2 8
Arb-X 66 d e e d 1 9 2
ar ® e"x d e f f e d
a f C"X a b c e e c b a Z_a _V. d -V. d a A
d = .459506 e = .517638 f = .577350
faces vertices edges
Calculations by D. Andrews and A. Steinbrecher [22].
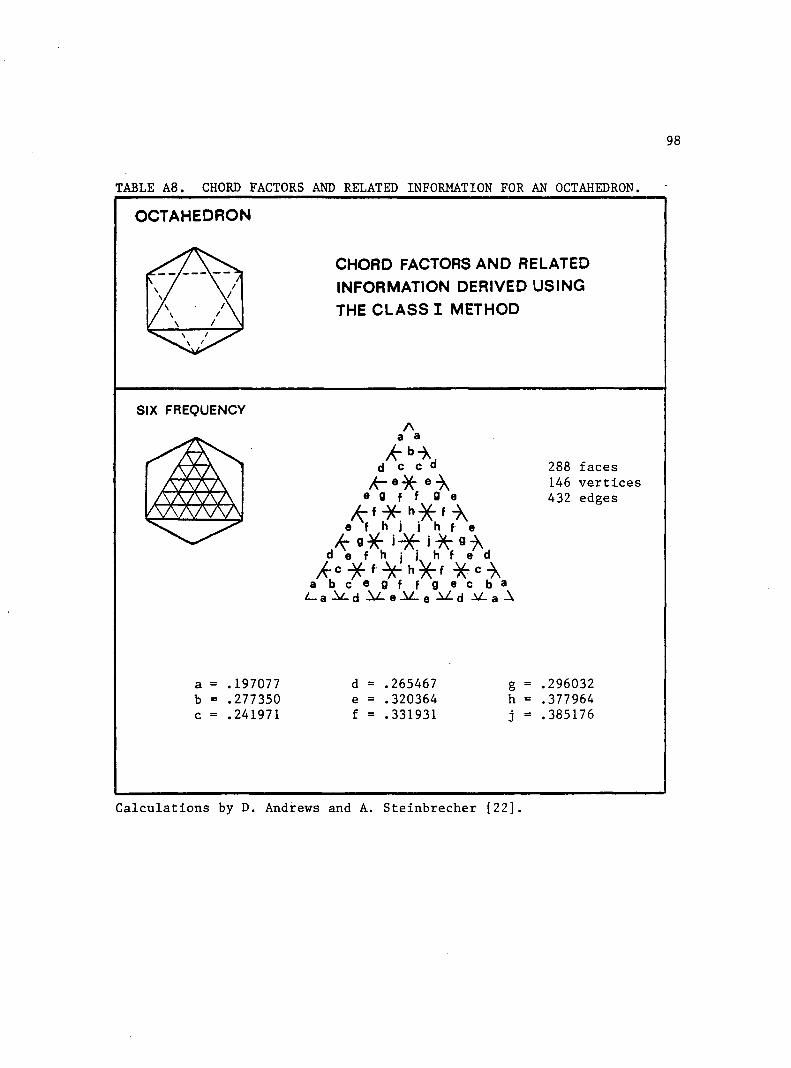
TABLE A8. CHORD FACTORS AND RELATED INFORMATION FOR AN OCTAHEDRON.
OCTAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
SIX FREQUENCY A
a a
/f b\ d c c «
e\ e g f f a e
/t"f y~.h^" f "X e f h j j h f e
A 9~S d e f h i j h f e d
X-c h f ^ c "X a b c e g f f g e c b a
i— a d -̂ •4- 0 e d -̂ 4- a
288 faces 146 vertices 432 edges
a = .197077 b - .277350 c = .241971
d = .265467 e = .320364 f = .331931
g = .296032 h = .377964 j = .385176
Calculations by D. Andrews and A. Steinbrecher [22].

TABLE A9. CHORD FACTORS AND RELATED INFORMATION FOR AN OCTAHEDRON.
OCTAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
NINE FREQUENCY a a \
d e e d A-®#8 "X
h g f f a h /r k -fr ) k-X
k n m I I m n k
J I P r q 1 r T | J k l-)fq>s^q-y I*
k m p q s t t s q p m k /t*n "X"'- -)(-1 ̂ -t h k m P I ' t t s q p m k h
/ r f l - * i i ^ g - x d e f j l p r q q r p | j f e d
/ f c - X - f - y - m - J e p ^ - p - ^ - m ^ f f c - \ a b c e g k n m l | m n k 9 e c b a La JwLd ̂ £-h-^ k j^k-^h-^d-^-aA
684 faces 326 vertices 972 edges
a = .124277 g = .162497 n = .185970 b = .175412 h = .185086 P = .240797 c = . 141457 j = .220863 q = .245917 d = .153795 k = .210702 r = .232229 e = .195190 1 = .206355 s = .262613 f = .1-78374 m = .215719 t = .264949
Calculations by D. Andrews and A. Steinbrecher [22].

100
TABLE A10. CHORD FACTORS AND RELATED INFORMATION FOR AN ICOSAHEDRON.
ICOSAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
ONE FREQUENCY
faces vertices edges
a -= 1.051462
TWO FREQUENCY
80 faces 42 vertices 120 edges
.546533 .618034
Calculations by Joseph D. Clinton [23].
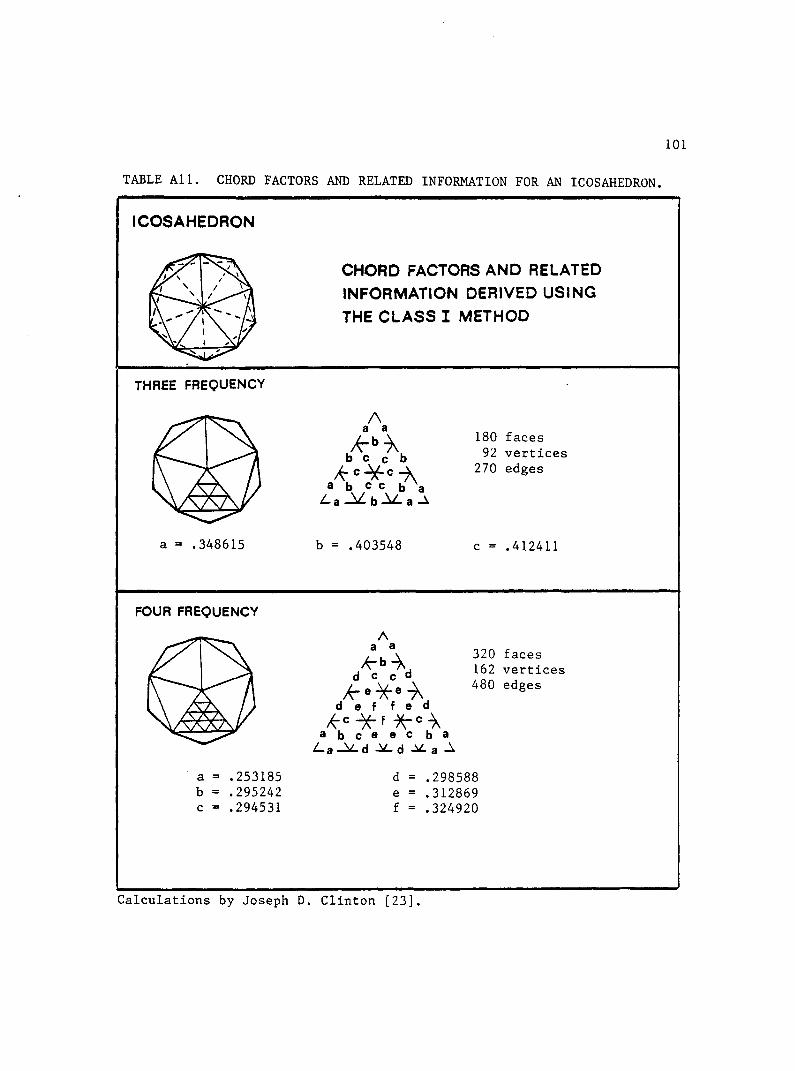
101
TABLE All. CHORD FACTORS AND RELATED INFORMATION FOR AN ICOSAHEDRON.
ICOSAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
THREE FREQUENCY
a = .348615
A a a
a~b\ b c c b
a b c c b a I— a b a
b = .403548
180 faces 92 vertices 270 edges
c = .412411
FOUR FREQUENCY
a = .253185 b = .295242 c = .294531
A a a
d c c d
Ar e^-e"X d e f f e d
x-c -*-f * R C \ a b c e e c b a Z_a
d = .298588 e = .312869 f = .324920
320 faces 162 vertices 480 edges
Calculations by Joseph D. Clinton [23].

TABLE A12. CHORD FACTORS AND RELATED INFORMATION FOR AN ICOSAHEDRON.
ICOSAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
FIVE FREQUENCY
a = .198147 b = .231790 c = .225686
aAa
>9^
a b ce 99 e c ba
d = .231598 e = .247243 f = .255167
500 faces 252 vertices 750 edges
g = h = j =
.245086
.245346
.261598
SIX FREQUENCY
aAa
d e e d
e g f .f g e A-f *J*. f-X e f J k k j. f e
4-9-fc k;}fck & 9 -fc. d e f I k K I f e d
a b e e g f f g e c b a la -^-d ̂ e-^-e^d-^a
720 362
faces vertices
1080 edges
a = .162567 b = .190477 c = .181908
d = .187383 e = .202820 f = .205908
g = .198013 j = .215354 k « .216628
Calculations by Joseph D. Clinton [23].

TABLE A13. CHORD FACTORS AND RELATED INFORMATION FOR A DODECAHEDRON.
DODECAHEDRON
CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
ONE FREQUENCY
A b b
A a A 60 faces 32 vertices 90 edges
a = .713640 b = .640850
TWO FREQUENCY
A c c
/ t d .^ b c
Z . A z _ a A
240 faces 122 vertices 360 edges
a = .362841 b = .340339
c = .324734 d = .376681
Calculations by Anthony Pugh [14].

104
TABLE A14. CHORD FACTORS AND RELATED INFORMATION FOR A DODECAHEDRON.
DODECAHEDRON
o CHORD FACTORS AND RELATED INFORMATION DERIVED USING THE CLASS I METHOD
THREE FREQUENCY
a = .237657 b = .252597 c = .228242
A e e
Ar »-X h g a h
A\f f \ e d c c d e
/. a b a
d = .225128 e = .213490 f = .252116
540 faces 272 vertices 810 edges
g = .225438 h = .224087 j = .249539
FOUR FREQUENCY
A f f
Jr I n n I
I k j i k I
f e d c c d e f l. a-V. b-V. b -V- aA
960 faces 482 vertices 1440 edges
a = .175924 b = .188429 c = .171879 d = .169507
e = .166955 f = .158465 g = .185219 h = .191986
j = .172304 k = .169639 1 = .167350 m = .189191
n - .165468 p = .185279
Calculations by Anthony Pugh [14].
APPENDIX B
FINITE ELEMENT MESHES, NUMBERING SCHEMES,
AND NODAL COORDINATE DATA USED IN ANALYSIS
105

106
35
20
33 36
32, 22
23 1&2
42
30, 24
38 29. 25
28 26
27.
40 39
FIGURE Bl. NODAL NUMBERING SCHEME

107
96 86 76 77,
36 ,66 46
.52 56 87
100 92
22 20
70 .62 ,45 42
27
65 67, 30. 32
60, 10 40 25 47 23
,83 55
53. 34 28 80 78 49,
.38 58 29 85 88 33 69 24
99 93 68 64
44 43 59
39 94 98 89 84,
FIGURE B2. BEAM AND BAR ELEMENT NUMBERING SCHEME

108
,46 37 26 36
40 27 20
35 32
30 37
55 58 25 42
14 44
39 28 60 53
33 34 29 38
24 43
54 59 49
FIGURE B3. TRIM ELEMENT NUMBERING SCHEME
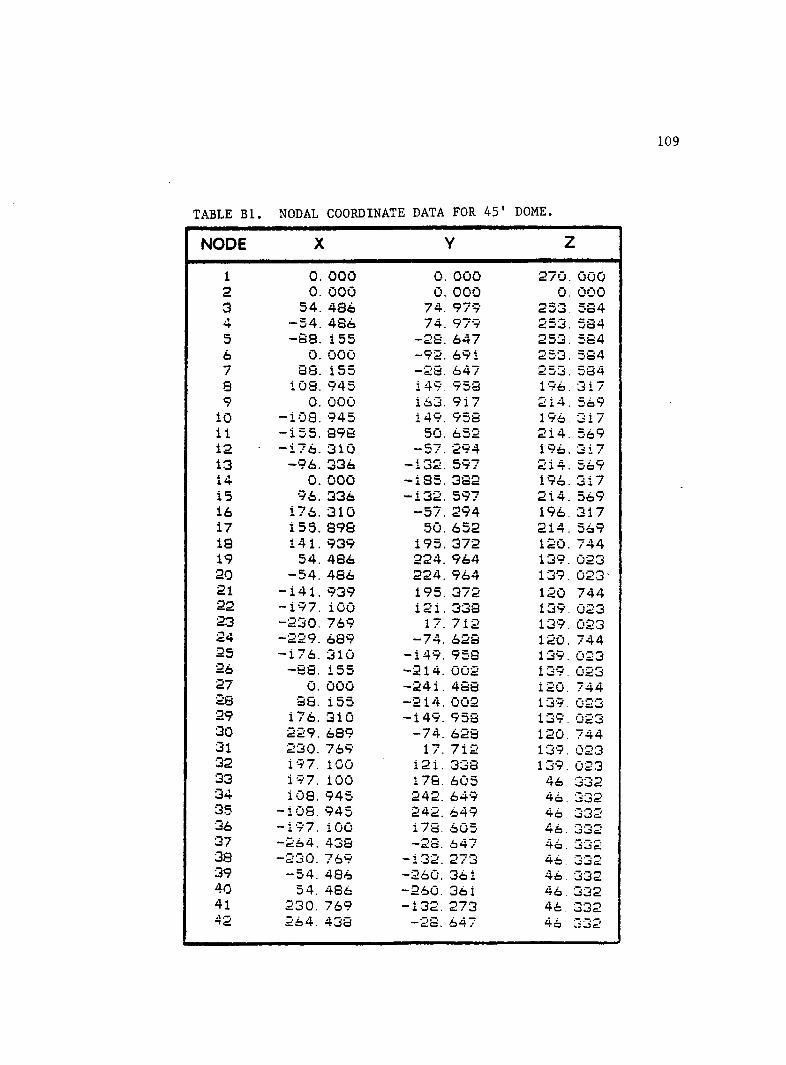
109
TABLE Bl. NODAL COORDINATE DATA FOR 45' DOME.
NODE X Y Z
1 0. 000 0 000 270 000 2 0. 000 0. 000 0 000 3 54. 486 74. 979 253 584 *+ -54. 486 74. 979 253 584 5 -88. i 55 -28. 647 2 33 584 6 0. 000 -92. 691 253 3cs4 7 88. i 55 -28. 647 ef D J 584 8 iOS. 945 149. vsy 1 317 9 0. 000 i63. 9 i 7 214 569
10 -108. 945 149. 958 196 317 ii -155. 398 50. 6d2 214 569 12 • -176. 3i0 -57. 294 196 3 i 7 13 -96. 336 — 132. 597 214 JO9 14 0. 000 -135. 3S2 1 TO 317 15 96. 336 -132. 597 214. 569 16 176. 310 -57. 294 196 317 17 i 55. 398 50. 652 214 569 18 141. 939 195. 372 120 744 19 54. 486 224. 964 139. 023 20 -54. 486 224. 964 139. 023 21 -141. 939 i 95. 372 120 744 22 -197. iOO i2i. 338 139 023 23 -230. 769 17. 712 139. 023 24 -229. 689 -74. 628 120. 744 25 — i / 6. 310 -i 49. 958 1 LiV. 023 26 -88. 155 -214. 002 139. 023 27 0. 000 -241. 488 120. 744 28 38. i 55 -214. 002 139. 023 29 176. 310 -i 49. 958 1 LiV . 023 30 229. 689 -74. 628 120. 744 31 c: U 0. 769 17. 7X2 139. 023 32 i 97. iOO 121. 338 139. 023 33 197. 100 178. 605 46 jot 34 108. 945 242. 649 46. 332 35 -iOS. 945 242. 649 46. 332 36 -197. 100 i 7o. 605 46. o J2 37 -264. 438 — c!ci. 647 46. JJ'2 38 — el L? 0 . 769 -132. 273 46. JJe: 39 -54. 486 -260. 361 46. *-\ O Jel 40 54. 486 -260. 36 i 46. 332 41 230. 769 -132. 273 46. 332 ^2 264. 43a -28. 647 46 332

TABLE B2. NODAL COORDINATE DATA FOR 39' DOME.
NODE X Y z
1 0. 000 0. 000 234. 000 2 0. 000 0. 000 0. 000 3 47. 908 65. 939 219. 346 4 -47. 908 65. 939 219. 346 5 -77. 517 -25. 186 219. 346 6 0. 000 -81. 505 219. 346 7 77. 517 -25. 186 219. 346 8 96. 478 132. 790 166. 777 9 0. 000 143. 931 184. 499
10 -96. 478 132. 790 166. 777 11 -136. 886 44. 477 184. 499 12 -156. 105 -50. 722 166. 777 13 -84. 600 -116. 442 184. 499 14 0. 000 -164. 139 166. 777 15 84. 600 -116. 442 184. 499 16 156. 105 -50. 722 166. 777 17 136. 886 44. 477 184. 499 IS 124. 582 171. 472 99. 161 19 47. 908 197. 037 117. 360 20 -47. 908 197. 037 117. 360 21 -124. 582 171. 472 99. 161 2P -172. 215 106. 328 117. 360 23 -201.823 15. 205 117. 360 24 -201. 577 -65. 496 99. 161 25 -156. 105 -128. 395 117. 360 26 -76. 827 -187. 246 117. 360 27 0. 000 -211. 951 99. 161 29 76. 827 -187. 246 117. 3&0 29 156. 105 -128. 895 117. 360 30 201. 577 -65. 496 99. 161 31 201. S23 15. 205 117. 360 32 172. 215 106. 32S 117. 360 33 172. 215 1 54. 902 33. 217 34 94. 431 211. 477 33. 217 35 -94. 431 211. 477 33. 217 36 -i72. 215 i 54. 905 33. 517 37 -230. 257 -25. 186 33. 217 38 -201.823 -113. 667 33. 217 39 -47. 908 -226. 625 33. 217
. 40 47. 908 -226. 622 33. 217 41 201.823 -113. 667 33. 217 42 230. 257 -25. 1S6 33. 217

Ill
TABLE B3. BAR ELEMENT CONNECTIVITY
ELEMENT NODE NODE ELEMENT NODE NODE ELEMENT NODE NODE NUMBER I J NUMBER I J NUMBER I J
1 3 4 44 28 29 87 21 36 2 4 5 45 31 32 88 • 24 38 3 5 6 46 20 21 89 27 40 4 6 7 47 23 24 90 30 42 5 7 3 48 26 27 91 34 19 6 1 3 49 29 30 92 36 22 7 1 4 50 32 18 93 38 25 a 1 5 51 18 8 94 40 28 9 1 6 52 21 10 95 42 31
10 1 7 53 24 12 96 20 35 n 8 9 54 27 14 97 23 37 12 10 11 55 30 16 98 26 39 13 12 13 56 8 19 99 29 41 14 14 15 57 10 22 100 32 •33 15 16 17 58 12 25 16 9 10 5V 14 28 17 11 12 60 16 31 18 13 14 61 19 9 19 15 16 62 22 11 20 17 8 63 25 13 21 8 3 64 28 15 2? 10 4 65 31 17 23 12 5 66 9 20 24 14 6 67 11 23 25 16 7 69 13 26 26 3 9 69 15 29 27 4 11 70 17 - 32 23 5 13 71 20 10 29 6 15 72 23 12 30 7 17 73 26 14 31 9 4 74 29 16 32 11 5 75 32 8 33 13 6 76 33 34 34 15 7 77 35 36 35 17 3 79 37 38 36 18 19 79 39 40 37 21 22 80 41 42 39 24 25 81 33 18 39 27 28 82 35 21 40 30 31 S3 37 24 41 19 20 84 39 27 42 22 23 85 41 30 43 25 26 86 18 34
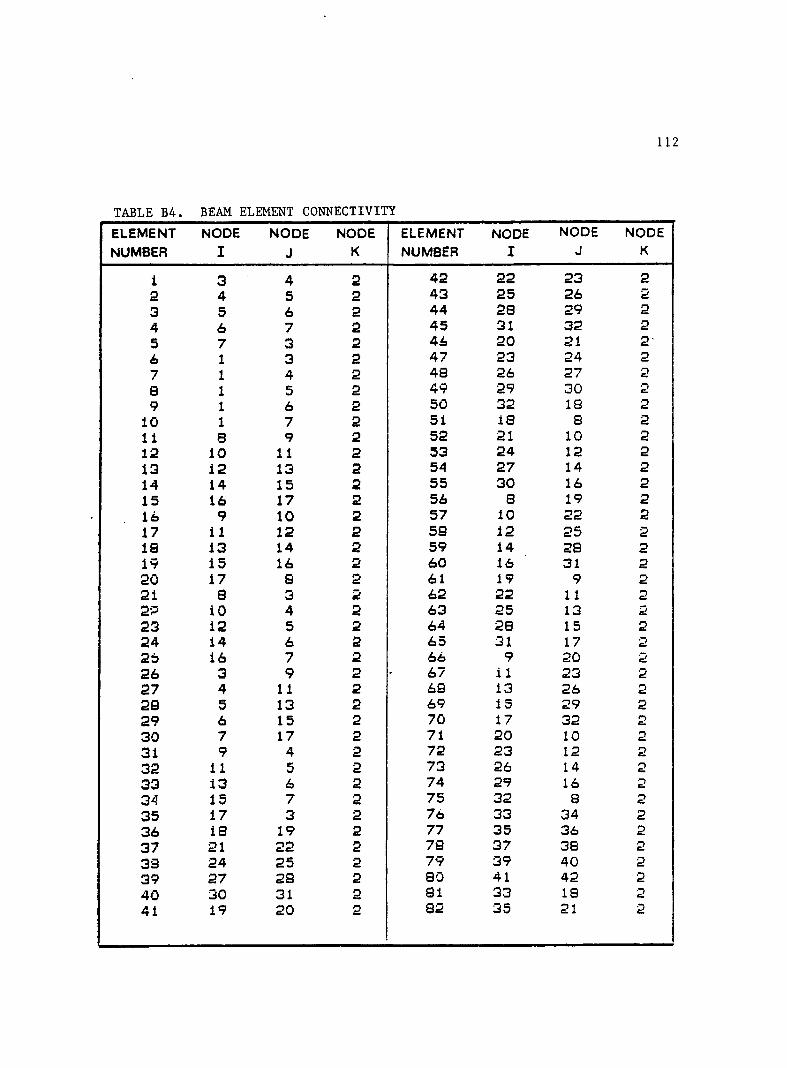
112
TABLE B4. BEAM ELEMENT CONNECTIVITY
ELEMENT NODE NODE NODE ELEMENT NODE NODE NODE
NUMBER I J K NUMBER I J K
i 3 4 2 42 22 23 2 2 4 5 2 43 25 26 2 3 5 6 2 44 28 29 2 4 6 7 2 45 31 32 2 5 7 3 2 46 20 21 2* 6 1 3 2 47 23 24 2 7 1 4 2 48 26 27 2 8 1 5 2 49 29 30 2 9 1 6 2 50 32 18 2
10 1 7 2 51 IS 8 2 11 8 9 2 52 21 10 2 12 10 11 2 53 24 12 2 13 12 13 2 54 27 14 2 14 14 15 2 55 30 16 2 15 16 17 2 56 8 19 2 1 6 9 10 2 57 10 22 2 17 11 12 2 58 12 25 2 18 13 14 2 59 14 28 2 19 i 5 16 2 60 16 31 2 20 17 S 2 61 19 9 2 21 S 3 2 62 22 11 2 2? iO 4 2 63 25 13 2 23 i2 5 2 64 28 15 2 24 14 6 2 65 31 17 2 2b i6 7 2 66 9 20 2 26 3 9 2 67 i 1 23 2 27 4 11 2 68 13 26 2 28 5 13 2 69 15 29 2 29 6 15 2 70 17 32 2 30 7 17 2 71 20 10 2 31 9 4 2 72 23 12 2 32 11 5 2 73 26 14 2 33 13 6 2 74 29 16 2 34 15 7 2 75 32 8 2 35 17 3 2 76 33 34 2 36 18 19 2 77 35 36 2 37 21 22 2 78 37 38 2 33 24 25 2 79 39 40 2 39 27 28 2 80 41 42 2 40 30 31 2 81 33 18 2 41 19 20 2 82 35 21 2
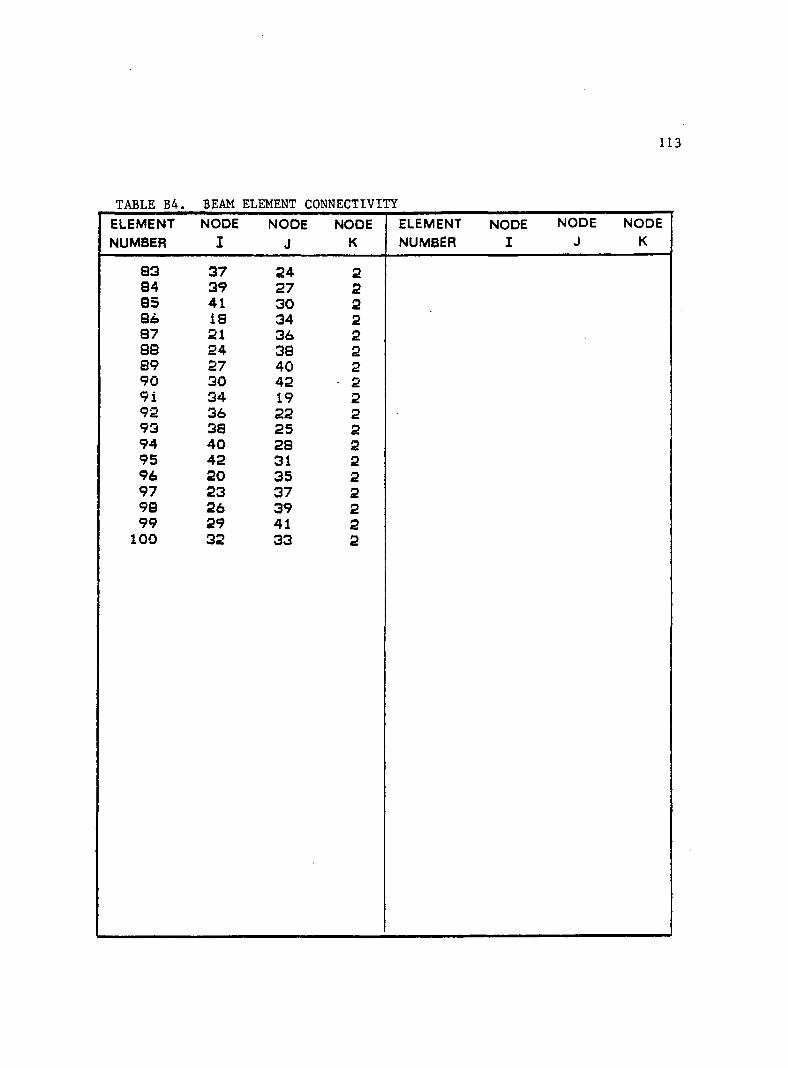
113
TABLE B4. BEAM ELEMENT CONNECTIVITY
ELEMENT NODE NODE NODE NUMBER I J K
83 37 24 2 84 39 27 2 85 41 30 2 86 18 34 2 87 21 36 2 88 24 38 2 89 27 40 2 90 30 42 2 9i 34 19 2 92 36 22 2 93 38 25 2 94 40 28 2 95 42 31 2 96 20 35 2 97 23 37 2 98 26 39 2 99 29 41 2
100 32 33 2
ELEMENT NODE NODE NODE NUMBER I J K

114
TABLE B5. TRIM ELEMENT CONNECTIVITY
ELEMENT NODE NODE NODE ELEMENT NODE NODE NODE NUMBER I J K NUMBER I J K
1 3 4 1 42 12 23 24 2 4 5 1 43 14 26 27 3 5 6 1 44 16 29 30 4 6 7 1 45 8 32 18 5 7 3 1 46 33 34 18 6 3 8 9 47 35 36 21 7 4 iO i 1 48 37 38 24 8 5 12 13 49 39 40 27 9 6 14 15 50 41 42 30
10 7 16 17 51 34 19 18 11 4 3 9 52 36 22 21 12 5 4 11 53 38 25 24 13 6 5 13 54 40 28 27 14 7 6 15 55 42 31 30 15 3 7 17 56 32 33 18 16 10 4 9 57 20 35 21 17 12 5 11 58 23 37 24 18 14 6 13 59 26 39 27 19 16 7 15 60 29 41 30 20 8 3 17 21 19 8 18 22 22 10 21 23 25 12 24 24 28 14 27 25 31 16 30 26 8 19 9 27 10 22 11 28 12 25 13 29 14 28 15 30 16 31 17 31 19 20 9 32 22 23 11 33 25 26 13 34 28 29 15 35 31 32 17 36 20 10 9 37 23 12 11 38 26 14 13 39 29 16 15 40 32 8 17 41 10 20 21

REFERENCES
1. Marks, Robert, and Fuller, R.B., The Dymaxion World of Buckminster Fuller, Anchor Press, New York, 1973.
2. Wright, D.T., "Membrane Forces and Buckling in Reticulated Shells," Journal of the Structural Division, ASCE, February, 1965.
3. Pacific Domes, Domebook Two, Random-House, New York, 1971.
4. Kenner, Hugh, Geodesic Math and How to Use It, University of California Press, Berkeley, CA, 1976.
5. Nutting Co., H.C., engineering report made to the Pease Woodwork Company, Cincinnati, Ohio, December, 1959.
6. Lederer, Ferdinand, "Membrane Forces and Buckling in Reticulated Shells," Discussion, Journal of the Structural Division, ASCE, October, 1965.
7. Rawlings, J.P., "Stress Analysis of a 45 ft. Diameter, 3 Frequency, Timber and Plywood Dome," engineering report prepared for Domes and Homes, Whitehouse, Texas, October, 1982.
8. Guinn, Robert, "Cathedralite Church Design, Daly City," engineering report, June, 1969.
9. McCutcheon, J.O., and Dickie, J.F., "Membrane Forces and Buckling in Reticulated Shells," Discussion, Journal of the Structural Division, ASCE, October, 1965.
10. McCutcheon, J.O., Eremin, A.A., Moses, G., Bradshaw, R.R., del Pozo, F., Beles, A.A., Dean, D.L., Lederer, F., Pagano, M., "Membrane Forces and Buckling in Reticulated Shells," Discussion, Journal of the Structural Division, ASCE, October, 1965.
11. C., Pe, Architecture, Art of," Ency. Brit., 1979.
12. Yarnall, William, Dome Builders Handbook Number Two, Running Press, Philadelphia, PA, 1978.
13. Jacobs, David, "An Expo Named Buckminster Fuller," New York Times, April 23, 1967.
115
116
14. Pugh, Anthony, Polyhedra, A Visual Approach, University of California Press, Berkeley, CA, 1976.
15. Kruschke, David, Dome Cookbook of Geodesic Geometry, David Kruschke, Milwaukee, Wisconsin, 1972.
16. Palmer, C.I., and Leigh, C.W., Plane and Spherical Trigonometry, 3rd Ed., McGraw-Hill, New York, 1925.
17. Desai, C.S., Elementary Finite Element Method, Prentice-Hall, New Jersey, 1979.
18. Kloppel, K., and Schardt, R., "Fur Berechnung von Netzkuppeln," Per Stahlbau, Wilhelm Ernst and Sohn, Berlin-Wilmersdorf, Vol. 31, May, 1962.
19. Bathe, K.J., Wilson, E.L., and Peterson, F.E., SAP IV, A Structural Analysis Program for Static and Dynamic Response of Linear Systems, University of California, Berkeley, CA, 1974.
20. Forest Products Laboratory, Forest Service, Wood Handbook: Wood as an Engineering Material, Agricultural Handbook No. 72, Washington, D.C.: Dept. of Agriculture, 1974.
21. Plywood Design Specification, by the American Plywood Association, Tacoma, Washington, 1980.
22. Andrews, D., Steinbrecher, A., calculation of chord factors presented in Polyhedra, A Visual Approach (see reference 14).
23. Clinton, J.D., "Advanced Structural Geometry Studies, Part I," Springfield, VA: National Technical Information Service, 1971.





























