Embed Size (px)
Citation preview

Informed Search
• Heuristic functions
• Greedy Search
• A? Search (Hart, Nilsson, and Raphael, 1968)
• Proofs of optimality and completeness
• Examples
• Iterative Deepening A? Search (IDA?)
• Simplified Memory-Bounded A? (SMA?).

Heuristic
Informally, a heuristic is any “rule of thumb,” or information that helps one solve
a problem.
In the context of search trees, a heuristic function, h(n), estimates the cost of
the cheapest path between node n and a goal node. Thus h(n) = 0, if n is a
goal node.
A greedy search always expands the node in the queue that is believed to be
closest to the goal state, i.e., the node in the queue with the smallest value of
h. Equivalent to a best-first search that uses h(n) to sort the queue.

Romania: h(n) = straight-line distance to Bucharest
Bucharest
Giurgiu
Urziceni
Hirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
LugojMehadia
DobretaCraiova
Sibiu
Fagaras
PitestiRimnicu Vilcea
Vaslui
Iasi
Straight line distanceto Bucharest
0
160
242
161
77
151
241
366
193
178
253
329
80
199
244
380
226
234
374
98
Giurgiu
UrziceniHirsova
Eforie
Neamt
Oradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Dobreta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75
120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86

Greedy Search: Arad to Bucharest
Arad
Sibiu
(h = 253)Timisoara
(h = 329)
Zerind
(h=374)

Romania: h(n) = straight-line distance to Bucharest
Bucharest
Giurgiu
Urziceni
Hirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
LugojMehadia
DobretaCraiova
Sibiu
Fagaras
PitestiRimnicu Vilcea
Vaslui
Iasi
Straight line distanceto Bucharest
0
160
242
161
77
151
241
366
193
178
253
329
80
199
244
380
226
234
374
98
Giurgiu
UrziceniHirsova
Eforie
Neamt
Oradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Dobreta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75
120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86

Greedy Search: Arad to Bucharest
Arad
Sibiu(h = 253)
Timisoara(h = 329)
Zerind(h=374)
Arad(h=366)
Fagaras(h = 178)
Oradea(h=380)
Rimnicu(h = 193)

Romania: h(n) = straight-line distance to Bucharest
Bucharest
Giurgiu
Urziceni
Hirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
LugojMehadia
DobretaCraiova
Sibiu
Fagaras
PitestiRimnicu Vilcea
Vaslui
Iasi
Straight line distanceto Bucharest
0
160
242
161
77
151
241
366
193
178
253
329
80
199
244
380
226
234
374
98
Giurgiu
UrziceniHirsova
Eforie
Neamt
Oradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Dobreta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75
120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86

Greedy Search: Arad to Bucharest
Arad
Sibiu(h = 253)
Timisoara(h = 329)
Zerind(h=374)
Arad(h=366)
Fagaras(h = 178)
Oradea(h=380)
Rimnicu(h = 193)
Sibiu(h=253)
Bucharest(h=0)
Total cost is g = 140 + 99 + 211 = 450.

Romania: h(n) = straight-line distance to Bucharest
Bucharest
Giurgiu
Urziceni
Hirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
LugojMehadia
DobretaCraiova
Sibiu
Fagaras
PitestiRimnicu Vilcea
Vaslui
Iasi
Straight line distanceto Bucharest
0
160
242
161
77
151
241
366
193
178
253
329
80
199
244
380
226
234
374
98
Giurgiu
UrziceniHirsova
Eforie
Neamt
Oradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Dobreta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75
120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86

Properties of Greedy Search (AIMA, pp. 95–96)
• “Greedy algorithms often perform quite well.”
• “Susceptable to false starts.”
• Time and memory complexity are both O(bm) in the worst case.

A? Search
Recall that
g(n) = the path cost from the root to node n
h(n) = the approxiate cost from n to the closest goal.
Now define,
f (n) = g(n) + h(n).
The f -cost, f (n), estimates the smallest path cost to a goal node through node
n.
An A? search is a best-first search using f (n) to order the nodes in the queue.

Admissible Heuristic
• A heuristic function h(n) is said to be admissible if it never overestimates
the cost of the cheapest path between n and a goal node.
• An admissible heuristic is always optimistic.
• If h is an admissible heuristic, then f (n) = g(n)+h(n) never overestimates
the true cost of the cheapest solution path through node n.
• It is common for f (n) to be monotonic, i.e., nondecreasing along the solu-
tion path.
• WLOG (without loss of generality) one can ensure monotoniciy by adopting
the pathmax f -cost. Let n be a parent of n’. Then let
f (n′) = max{f (n), g(n′) + h(n′)}.

Romania: Contours of constant f for a monotonicf -cost
Giurgiu
Urziceni
Hirsova
Eforie
Neamt
Oradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Dobreta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
380
420
400

Romania: A? Search
Bucharest
Giurgiu
Urziceni
Hirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
LugojMehadia
DobretaCraiova
Sibiu
Fagaras
PitestiRimnicu Vilcea
Vaslui
Iasi
Straight line distanceto Bucharest
0
160
242
161
77
151
241
366
193
178
253
329
80
199
244
380
226
234
374
98
Giurgiu
UrziceniHirsova
Eforie
Neamt
Oradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Dobreta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75
120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86

A? Search: Arad to Bucharest
Arad
Sibiu
(h = 253,
f = 393)
Timisoara
(h = 329,
f = 447)
Zerind
(h = 374,
f = 449)
g = 140 118 75

Romania: A? Search
Bucharest
Giurgiu
Urziceni
Hirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
LugojMehadia
DobretaCraiova
Sibiu
Fagaras
PitestiRimnicu Vilcea
Vaslui
Iasi
Straight line distanceto Bucharest
0
160
242
161
77
151
241
366
193
178
253
329
80
199
244
380
226
234
374
98
Giurgiu
UrziceniHirsova
Eforie
Neamt
Oradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Dobreta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75
120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86

A? Search: Arad to Bucharest
Arad
Sibiu(h = 253,f = 393)
Timisoara(h = 329,f = 447)
Zerind(h = 374,f = 449)
g = 140
g = 280239 291
220
118 75
Arad(h = 366,f = 646)
Fagaras(h = 178,f = 417)
Oradea(h = 380,f = 671)
Rimnicu(h = 193,f = 413)

Romania: A? Search
Bucharest
Giurgiu
Urziceni
Hirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
LugojMehadia
DobretaCraiova
Sibiu
Fagaras
PitestiRimnicu Vilcea
Vaslui
Iasi
Straight line distanceto Bucharest
0
160
242
161
77
151
241
366
193
178
253
329
80
199
244
380
226
234
374
98
Giurgiu
UrziceniHirsova
Eforie
Neamt
Oradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Dobreta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75
120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86

A? Search: Arad to Bucharest
Arad(f = 366)
Sibiu(h = 253,f = 393)
Timisoara(h = 329,f = 447)
Zerind(h = 374,f = 449)
g = 140
g = 280
g = 366
239 291220
317 300
118 75
Arad(h = 366,f = 646)
Fagaras(h = 178,f = 417)
Oradea(h = 380,f = 671)
Rimnicu(h = 193,f = 413)
Craiova(h = 160,f = 526)
Pitesti(h = 98,f = 415)
Sibiu(h = 253,f = 553)

Romania: A? Search
Bucharest
Giurgiu
Urziceni
Hirsova
Eforie
NeamtOradea
Zerind
Arad
Timisoara
LugojMehadia
DobretaCraiova
Sibiu
Fagaras
PitestiRimnicu Vilcea
Vaslui
Iasi
Straight line distanceto Bucharest
0
160
242
161
77
151
241
366
193
178
253
329
80
199
244
380
226
234
374
98
Giurgiu
UrziceniHirsova
Eforie
Neamt
Oradea
Zerind
Arad
Timisoara
Lugoj
Mehadia
Dobreta
Craiova
Sibiu Fagaras
Pitesti
Vaslui
Iasi
Rimnicu Vilcea
Bucharest
71
75
118
111
70
75
120
151
140
99
80
97
101
211
138
146 85
90
98
142
92
87
86

A? Search: Arad to Bucharest
Arad(f = 366)
Sibiu(h = 253,f = 393)
Timisoara(h = 329,f = 447)
Zerind(h = 374,f = 449)
g = 140
g = 280
g = 366
g = 455
239 291220
317
414 418
300
118 75
Arad(h = 366,f = 646)
Fagaras(h = 178,f = 417)
Oradea(h = 380,f = 671)
Rimnicu(h = 193,f = 413)
Craiova(h = 160,f = 526)
Pitesti(h = 98,f = 415)
Sibiu(h = 253,f = 553)
Craiova(h = 160,f = 615)
Rimnicu(h = 193,f = 607)
Bucharest(h = 0,
f = 418)

Optimality of the A? Search (AIMA, pp. 99–100)
Theorem 1 If h is an admissible heuristic and more than one goal exists, then
the A? search always expands the goal with the cheapest path cost first.
Let G denote an optimal goal state, with path cost f ?. Let G2 denote a subop-
timal goal, with path cost g(G2) > f ?.
Assume that A? expanded G2 and terminated, before expanding G. Let n denote
the node in the queue that lies on a solution path to G. Becauses h is admissible
f ? ≥ f (n).
Because n was not expanded before G2,
f (n) > f (G2).
Thus,
f ? ≥ f (G2) = g(G2),
a contradiction!
Locally Finite Search Trees
A search tree is said to be locally finite if it has
1. a finite branching factor, and
2. the cost of every action has a lower postive bound.
Lemma 1 At every step of the A? search before termination, there exists a node
n? in the frontier that satisfies the following three conditions:
1. n? is on an optimal path from root to a goal,
2. A? has found an optimal path from root to n?, and
3. f (n?) = g(n?) + h(n?) < f ?.

Completeness of the A? Search (AIMA, p. 100.)
Theorem 2 The the A? search, with an admissible heuristic, is complete for
every locally finite search tree.
Let G denote an optimal goal node with path cost f ?. The A? search algorithm
expands nodes in order of increasing f . Thus a goal node with path cost f ?
will be expanded after a finite number of steps.
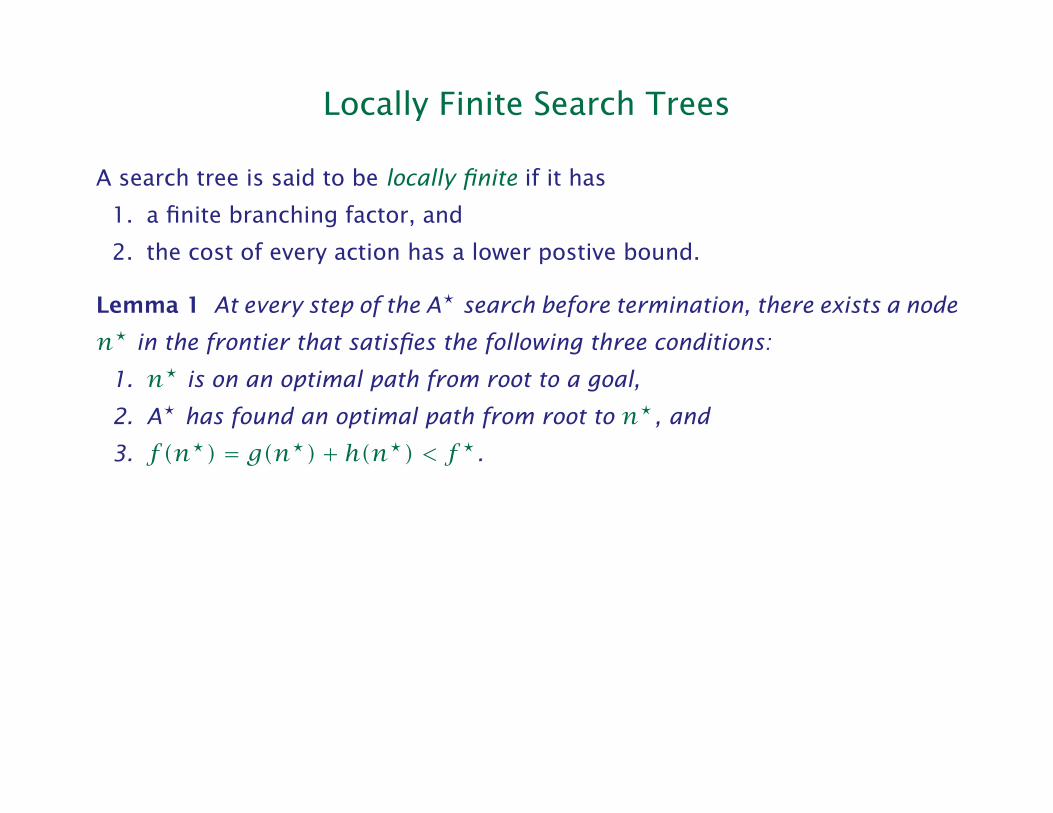
Heuristics for the Eight Puzzle
5 4
6 1 8
7 3 2
1 2
8
3
4
7 6 5
• h1(n) = the number of misplaced tiles.
• h2(n) = the sum of the L1 distances between each tile and its home.
In this example, it can be shown that h2(n) ≥ h1(n) for every state n. In this
event, h2 is said to dominate h1.
Theorem 3 Let A?i denote an A? search that assumes the heuristic hi for i =
1, 2. If h2 dominates h1, then every state node expanded by A?2 is also expanded
by A?1 .
If several admissible heuristics are avalailabe, h1, . . . , hk, one should use
h(n) = max{h1(n), . . . , hk(n)}.

Generating Heuristics
• Effective Branching Factor β.
N = 1 + β + β2 + . . . + βd
• More efficient heuristics result in a smaller β.
• Generating heuristics using a relaxed problem: abstractions and homeo-
morphisms.
• Automatic generation of heuristics by ABSOLVER (Prieditis, 1983).
• What other heuristics can we construct for the eight puzzle?

Iterative Deepening A? Search (IDA?)
• Proposed by Richard Korf (1985), who proved its completeness.
• Like breadth-first search, A? search still has exponential complexity; usually one runs outof memory before one runs out of time. (See Figure 3.11 on p. 74 of AIMA.)
• For uniformed search, iterative deepening is complete, but uses less memory thanbreadth-first search. Can one generalize this to idea to A?.?
• Iterative deepening, but using a limit based on the f -cost estimate instead of depth:
1. Let fmax = f (n0), where n0 is the root. Note that f ? ≤ fmax.
2. Perform a depth-limited depth-first search for the goal, starting from root. Only ex-pand node n if g(n) ≤ fmax. Also, compute the f -cost of every node that is visited.Backtrack as necessary.
3. If a goal is found, terminate successfully.
4. If the goal node was not found after expanding every allowed node, then increase fmax
to the minimum f -value obtained on the nodes that were visited, but not expanded.Repeat from step 2 until either a goal is found, or the tree is exhausted.

Questions about IDA?
1. What might happen if f does not satisfy the monotonicity condition:
if n′ is a successor of n, then
h(n) ≤ c(n, n′) + h(n′) =⇒ f (n) ≤ f (n′)?
2. What happens if every node in the search space has a unique f -cost?

Recursive Best-First Search (RBFS)
• RBFS decreases the execution time of IDA? at the expense of additional
memory.
•