Embed Size (px)
Citation preview

VorlesungsskriptRheologie
Dr.-Ing. Róbert Bordás
Inhaltsverzeichnis
1 Einführung, Grundbegriffe und Wiederholung der Strömungsmechanik 41.1 Rheologie und Rheometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 Was bedeutet fließen? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Zielgröße: die Viskosität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.4 Kinematik und Deformationsgeschwindigkeitstensor . . . . . . . . . . . . . . . 51.5 Maß für die Beanspruchung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.6 Zurück zur Viskosität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.7 Bedarf der Modellierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.8 Einführung zum Praktika - Couette-Strömung . . . . . . . . . . . . . . . . . . . . 10
2 Newtonsche Fluide 132.1 Wozu braucht man überhaupt die Viskosität? . . . . . . . . . . . . . . . . . . . . 132.2 Navier-Stokes-Gleichung für eine Newtonsche Flüssigkeit mit konstanter Vis-
kosität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3 Ein Wert für die Viskosität? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.4 Couette-Strömung und graphische Darstellung der Viskosität . . . . . . . . . . . 17
3 Nicht-Newtonsche Fluide mit zeitunabhängiger Viskosität - Teil I. 183.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.2 Scherverdünnendes Fließverhalten . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2.2 Physikalische Erklärung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.2.3 Modell für die Viskosität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.3 Scherverdickendes Fließverhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3.2 Physikalische Erklärung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243.3.3 Modell für die Viskosität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4 Nicht-Newtonsche Fluide mit zeitunabhängiger Viskosität - Teil II. 254.1 Einleitung: zurück zum Potenzgesetz . . . . . . . . . . . . . . . . . . . . . . . . . 254.2 Viskositätsgrenze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25

4.3 Komplexere Modelle für die Viskosität . . . . . . . . . . . . . . . . . . . . . . . . . 264.3.1 Prandtl-Eyring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.3.2 Powell-Eyring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.3.3 Carreau-Yasuda . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.4 Fluide mit Fließgrenze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.5 Modifiziertes Bingham-Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5 Thixotrope und rheopexe Substanzen 295.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.2 Thixotropes Verhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.2.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.2.2 Pseudo-Thixotropie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.3 Rheopexes Verhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.3.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.3.2 Pseudo-Rheopexie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.4 Viskositätsmodelle für zeitabhängige Substanzen . . . . . . . . . . . . . . . . . . 335.4.1 Einfacher Ansatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.4.2 Ansatz mit Strukturparameter . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.5 Messungen für Thixotropie / Rheopexie . . . . . . . . . . . . . . . . . . . . . . . . 345.5.1 Scherratengeregelt: Vorgabe von γ . . . . . . . . . . . . . . . . . . . . . . . 345.5.2 Schubspannungsgeregelt: Vorgabe von τ . . . . . . . . . . . . . . . . . . . 35
6 Kanonische Strömungen nicht-newtonscher Fluide: Konsequenzen für die Rheo-metrie 366.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 366.2 Ausgangslösung für eine inkompressible Strömung im achsensymmetrischen
System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376.2.1 Allgemeine Lösung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376.2.2 Lösung für Potenzgesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406.2.3 Newtonsches Verhalten mit Fließgrenze . . . . . . . . . . . . . . . . . . . 41
6.3 Allgemeine Beziehung zwischen dem Volumenstrom, dem Druckgradient undder Viskosität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426.3.1 Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426.3.2 Messprinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.4 Rotationsviskosimetrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.4.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 466.4.2 Rheometer mit konzentrischen Zylindern . . . . . . . . . . . . . . . . . . 466.4.3 Scherung? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.4.4 Kegel-Platte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 476.4.5 Platte-Platte Konfiguration . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
7 Viskoelastische Substanzen und Feder-Dämpfer-Modell 527.1 Idealviskoses Verhalten (Newtonsches Fluid) . . . . . . . . . . . . . . . . . . . . . 527.2 Idealelastisches Deformationsverhalten . . . . . . . . . . . . . . . . . . . . . . . . 52
2

7.3 Viskoelastische Substanzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 537.3.1 Mechanische Analogie von Maxwell (1831-1879) . . . . . . . . . . . . . . 547.3.2 Mathematisches Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
8 Oszillationsrheometrie 558.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 558.2 Verhalten von idealviskosen Substanzen (Newton) . . . . . . . . . . . . . . . . . 568.3 Verhalten von idealelastischen Substanzen (Hooke) . . . . . . . . . . . . . . . . . 568.4 Verhalten von VE-Substanzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 578.5 Darstellung und Analyse mit komplexen Zahlen . . . . . . . . . . . . . . . . . . . 58
8.5.1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 588.5.2 Komplexer Schubmodul . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 598.5.3 Polardarstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
9 Praktische Oszillationsmessungen 619.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Prof. D. ThéveninDr.-Ing. R. Bordás 15. Januar 2014
3

1 Einführung, Grundbegriffe und Wiederholung derStrömungsmechanik
1.1 Rheologie und Rheometrie
Rheologie - Lehre
Rheometrie - Messen
ρει (rhei) - Griechisch ≈ Fließen
⇒ Verstehen/charakterisieren alle Stoffe, die fließen.
1.2 Was bedeutet fließen?
Def.:fließen ist eine leicht3 erreichbare Verformung2 eines Stoffes infolge einer Beanspruchung1.B
1(x) und 2(y): zwei Achsen (Koordinaten) der Diagramme.
3: keine starre Körper berücksichtigt.
Plastische Verformung (von z.B. Edelstahl) ist keine Rheologie für die Strömungsmechanik.Die Rheologie betrachtet nur Fluide (Gas,Flüssigkeit, o.ä.), aber keine Feststoffe.
Ist der Unterschied zwischen Fluid und Feststoff ganz klar?!
Beispiele:
• Stärkelösung http://www.youtube.com/watch?v=kUW9nI9GDJ0
• Silikonpolymer
• Gletscher
• Fensterglas
Die genannten Beispiele weisen alle Fließverhalten auf. ⇒ Unterschied ist nicht einfach, kei-ne scharfe Grenze der Rheologie.
1.3 Zielgröße: die Viskosität
Das Bindeglied zwischen Beanspruchung und resultierende Verformung wird Viskosität (Zä-higkeit) genannt.
Die Viskosität kann modelliert bzw. experimentell bestimmt werden.
Um weiter zu kommen, zurück zur Strömungsmechanik:

1.4 Kinematik und Deformationsgeschwindigkeitstensor
(Vorlesung Nr. 7 bzw. Kap. 8 im Skript)
y
x
A B
C D
A‘
B‘
C‘D‘
Zeit t
Zeit t+dt
Bahnlinie
Abbildung 1: Bewegung eines materiellen Systems (in 2D)
Das Kontrollvolumen (ABC D) enthält viele, aber immer gleiche Fluidelemente. (Zeitpunkt tund Zeitpunkt t+dt ) Die Fluidelemente sind über die Bahnlinie verknüpft. Verformung undBewegung kann man beschreiben. Voraussetzung: Eigenschaften am Punkt A sind bekannt.
D → D ′ =
∣∣∣∣∣∣∣∣xA +d x+ vx d t+ ∂vx
d x d xd t+ 12
(∂vx∂y + ∂vy
∂x d yd t)+ 1
2
(∂vx∂y − ∂vy
∂x d yd t)
y A +d y︸ ︷︷ ︸+ vy d t︸ ︷︷ ︸+ ∂vy
d yd yd t︸ ︷︷ ︸+
1
2
(∂vx
∂y+ ∂vy
∂xd xd t
)︸ ︷︷ ︸+
1
2
(∂vy
∂x− ∂vx
∂yd yd t
)︸ ︷︷ ︸
∣∣∣∣∣∣∣∣Position D Translation Dilatation Winkeldeformation Rotation
(Konvektion) (Dehnung) (Scherung) (Drehung)
Für eine inkompressible Strömung (ρ =Konst.) ∇· v = ∂vx∂x + ∂vy
∂y + ∂vz∂z = 0 ⇒ Dilatation räum-
lich verknüpft (Massenerhaltung, gleiche Fläche/volumen). Jede beliebige Bewegung einesFluids kann als Summe einzelner Anteile zerlegt werden (Konvektion, Dehnung, Scherungund Drehung).
5

Quantifizierung:
• Translation: v
• Dehnung: ∇· v oder(∂vx∂x ,
∂vy
∂y , ∂vz∂z
)• Scherung: Tensor 2. Stufe, mit (2×2) bzw. (3×3) für 2D bzw. 3D, die in jedem Punkt in
dem Fluid existiert.
Deformationsgeschwindigkeitstensor (Deformationstensor): d mit Geschwindigkeitskompo-nenten u, v, w :
d =
∂u∂x
12
(∂u∂y + ∂v
∂x
)12
(∂u∂z + ∂w
∂x
)12
(∂u∂y + ∂v
∂x
)∂v∂y
12
(∂v∂z + ∂w
∂y
)12
(∂u∂z + ∂w
∂x
)12
(∂v∂z + ∂w
∂y
)∂w∂z
• di , j = 1
2
(∂vi∂x j
+ ∂v j
∂xi
), mit i , j = 1,2,3
• Räumliche Koordinaten: (x1, x2, x3)
• Geschwindigkeitskomponenten: (v1, v2, v3)
• Deformation ist die Überlagerung von Dehnung und Winkeldeformation
• Dehnung sind die Diagonalelemente: spur(d) =∇· v = 0 für inkompressible Medien,
• Winkeldeformation ist der Rest.
• Tensor ist symmetrisch: di , j = d j ,i
Deformation
• Dehnung → Dehnviskosität
• Scherung → Scherviskosität︸ ︷︷ ︸: Messung bei der ersten Übung
Rheologie
1.5 Maß für die Beanspruchung
Aus Sicht der Strömungsmechanik ist ein Fluid lokal eine homogene Substanz. Von Bedeu-tung einer Fluid ist also nicht wirklich die lokale Kraft sondern eher die Spannung als Maßder Beanspruchung sinnvoll.
Spannung
Spannung := KraftFläche , wobei als Fläche die gemeint ist, worauf die Kraft wirkt.
n für „normal": senkrechter Einheitsvektor zur Fläche, der nach außen zeigt.
Spannungskomponente:
6

y
x
z
Fluid
Abbildung 2: Einheitsvektoren und Schubspannung
τxz : in der Fläche, die senkrecht zu ex verläuft und nach z zeigt.
Damit können auch „Normalspannungen"definiert werden: τxx ,τy y ,τzz .
In der Strömungsmechanik werden die Normalspannungen mit dem Druck p identifiziert.
Kräfte in der x-Richtung d 2px ,d 2p ′x . Falls px 6= p ′
x :
• resultierende Kraft ∝ d 21
• Masse ∝ d 3
• limd→0
(Beschleunigung) →∞.
⇒ Alle Druckwerte sind lokal identisch:
Gesetz von Pascal, Druck p ist auf Mikroskala isotrop: px = p ′x = py = p ′
y = pz = p ′z
Druck = skalar: eine Wert pro Punkt.
Ähnlicher Vorgang für die Scherung:
Falls τxz 6= τzx
1∝≡ proportionell
7

• Drehmoment ∝ d 3
• Inertialmoment ∝ d 5
• limd→0
(Drehbeschleunigung) →∞.
⇒ Scherspannungen müssen paarweise identisch sein: τi , j = τ j ,i ⇒ Scherspannungstensorτ ist symmetrisch.
σ= −pI+ τ
Spannungs- Normal- Scher-tensor spannungen spannung
(Druck) (symmetrisch)
1.6 Zurück zur Viskosität
Scherspannung
Scherung
Anstieg
Abbildung 3: Graphische Darstellung der Viskosität: Zusammenhang zwischen Scherspan-nung und Scherung
Beanspruchung: Spannung
Deformation: Scherung
8

(scher)Viskosität := ScherspannungScherung
η; [η] = [Spannung][Scherung] = N/m2
[ ∂vx∂y ]
= N/m2
1/s= Pa
1/s= Pa · s = kg/m·s
Aus Sicht der Physik, noch bessere alternative: die kinematische Viskosität: ν = ηρ ; [ν] = m2/s
(eigentlich Diffusionskoeffizient für Momentum). Wird aber selten in der Rheologie betrach-tet.
1.7 Bedarf der Modellierung
Warum muss η gemessen werden?
In den meisten Fällen gibt es kein direktes theoretisches Modell für η in der Strömungsme-chanik.
Grund: Kontinuumsansatz der Strömungsmechanik.
M/V„Dichte“
VVk
Nicht reproduzierbar
Strömungsmechanik
Abbildung 4: Kontinuumsansatz der Strömungsmechanik. (Volumen - V , Fluidmasse - MDichte (ρ) = ?
Im Bild 4 ist das Kontinuumsvolumen VK typischerweise 1×1×1 µm = 10−18 m3.
9

• Volumen zu groß: Fluid nicht homogen
• Volumen zu klein: nur noch ganz wenige Teilchen sind drin.
Ein Punkt in der Strömungsmechanik (das Fluidelement) hat ein endliches Volumen: VK > 0!
Ideales Gas (standard Bedingungen)
1 Mol = 6,02 ·1023 Teilchen. ⇔ V = 22,3 dm3. Da VK = 10−18 m3 ⇒ 27 Millionen Teilchen inVK .
Problem: Die Viskositätη ist ein Ergebnis von Wechselwirkungskräfte auf Teilchenebene. Diesist die Ursache für die Viskosität. In der Strömungsmechanik werden keine Teilchen Berück-sichtigt /, also muss die Viskosität modelliert bzw. gemessen werden.
Trotzdem eine gute Nachricht dabei:
• η resultiert von Wechselwirkungskräfte zwischen Molekülen
• in einem (dilutierten) Gas gibt es nur wenige und einfache Wechselwirkungen.
• im Sinne der Rheologie (η) ist ein Gas daher sehr einfach.
→ in der Vorlesung wird mit Flüssigkeiten u.ä. gearbeitet.
1.8 Einführung zum Praktika - Couette-Strömung
x
vx(y)
u
Flüssigkeit
y
Spalthöhe hSpalt h
Technische Realisierung
Abbildung 5: Konfiguration, Couette-Strömung.
Geschwindigkeit: v , festgelegt durch Messung.
Erhaltungsgleichungen der Strömungsmechanik:
• Massenerhaltung: ∂ρ∂t +∇(ρv) = 0
• Impulserhaltung: ρDvDt = ρg −∇p +∇·τ
• Flüssigkeit: ρ =Konst. →– Masse: ∇· v = 0
10
– Impuls:DvDt = g − 1
ρ∇p + 1ρ∇·τ
Stationäre Strömung:
DvDt =
0∂v∂t + (v ·∇)v
Ebene Strömung:
v = (vx , vy ,>0
vz )
Die Strömung ist unendlich (bzw. periodisch) in der x-Richtung, es kann keinen Druckgradi-ent in x-Richtung geben!
∂p∂x = 0
Schwerkraft vernachlässigbar:
• h klein, dünnes Film
• Messung in einer horizontalen Ebene
Massenerhaltung:
∇· v = 0 =0
∂vx∂x + ∂vy
∂y = 0 → ∂vy
∂y = 0
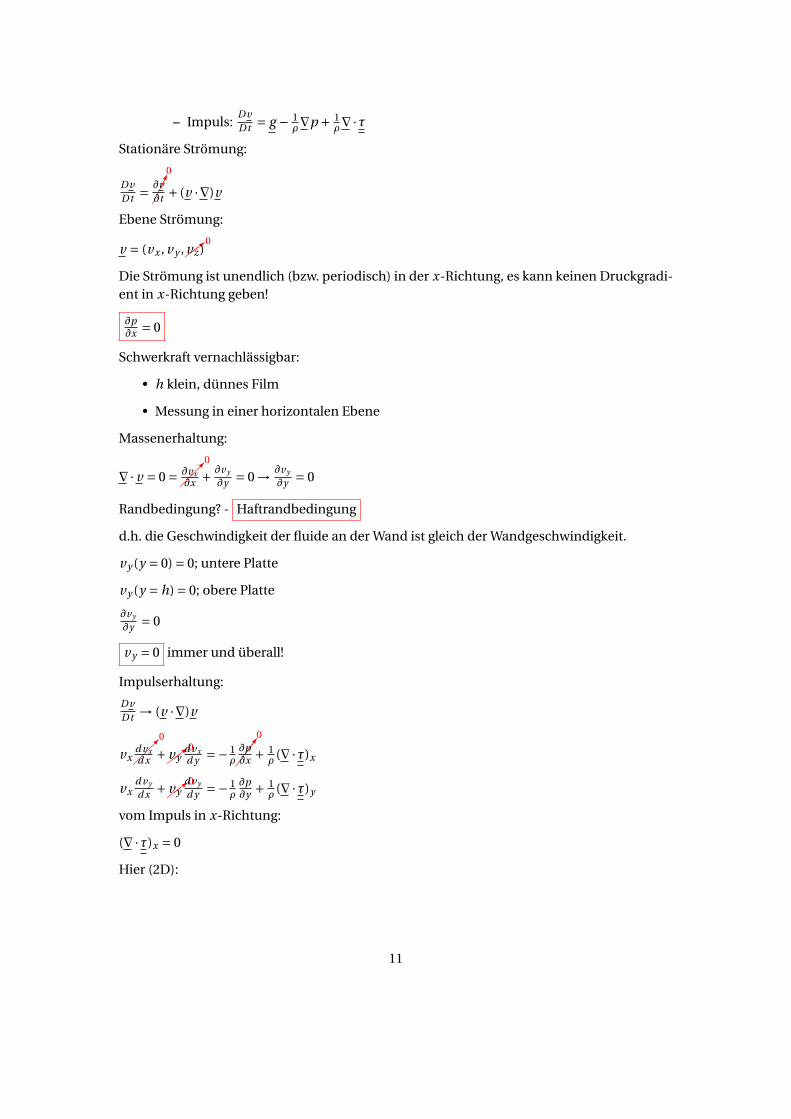
Randbedingung? - Haftrandbedingung
d.h. die Geschwindigkeit der fluide an der Wand ist gleich der Wandgeschwindigkeit.
vy (y = 0) = 0; untere Platte
vy (y = h) = 0; obere Platte
∂vy
∂y = 0
vy = 0 immer und überall!
Impulserhaltung:
DvDt → (v ·∇)v
vx
0d vxd x +>
0vy
d vxd y =− 1
ρ7
0∂p∂x + 1
ρ (∇·τ)x
vxd vy
d x +>0
vyd vy
d y =− 1ρ∂p∂y + 1
ρ (∇·τ)y
vom Impuls in x-Richtung:
(∇·τ)x = 0
Hier (2D):
11
(∇·τ)x =
0∂τxx∂x + ∂τx y
∂y
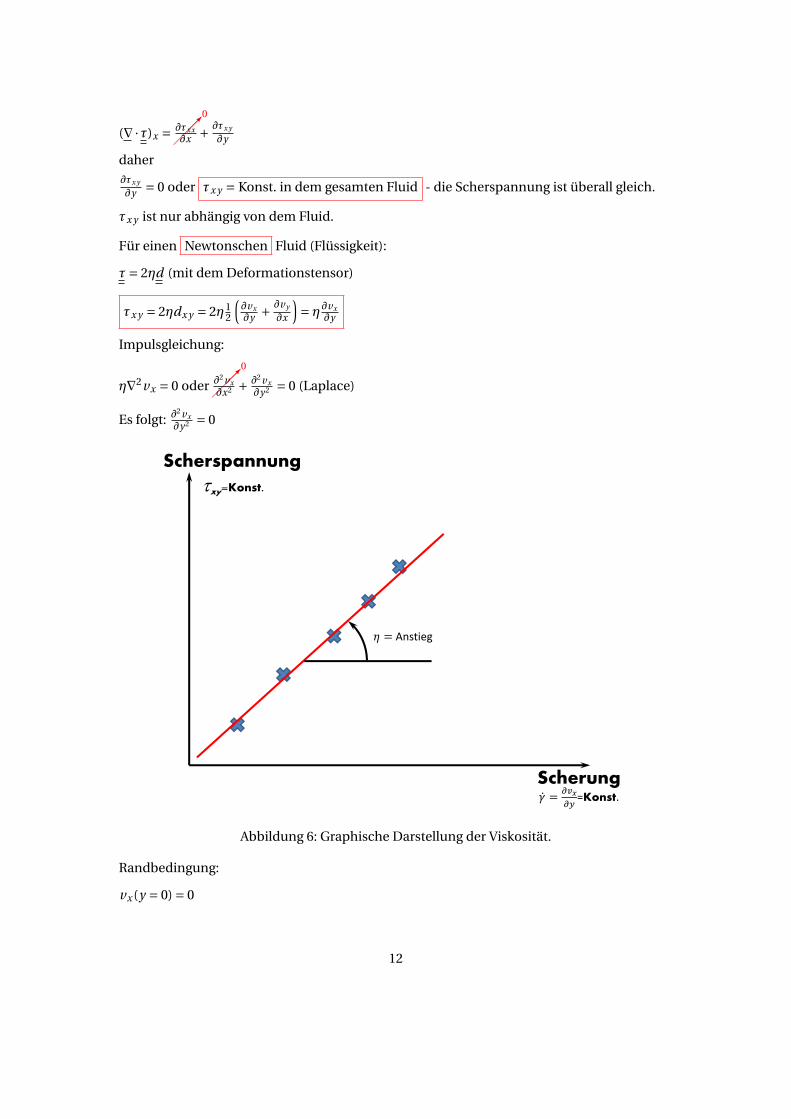
daher∂τx y
∂y = 0 oder τx y = Konst. in dem gesamten Fluid - die Scherspannung ist überall gleich.
τx y ist nur abhängig von dem Fluid.
Für einen Newtonschen Fluid (Flüssigkeit):
τ= 2ηd (mit dem Deformationstensor)
τx y = 2ηdx y = 2η12
(∂vx∂y + ∂vy
∂x
)= η∂vx
∂y
Impulsgleichung:
η∇2vx = 0 oder
0∂2vx
∂x2 + ∂2vx
∂y2 = 0 (Laplace)
Es folgt: ∂2vx
∂y2 = 0
Scherspannung
xy=Konst.
Scherung
Anstieg
=Konst.
Abbildung 6: Graphische Darstellung der Viskosität.
Randbedingung:
vx (y = 0) = 0
12
vx (y = h) =U
Integration: ∂vx∂y = a
vx = ay +b
vx (y) =U yh
lineares Geschwindigkeitsprofil
∂vx∂y = U
h =Konst.: Scherung
Für eine Newtonsche Flüssigkeit: τx y = η∂vx∂y (linear)
2 Newtonsche Fluide
2.1 Wozu braucht man überhaupt die Viskosität?
Für die Beschreibung der Bewegungen: Impulsgleichung Wiederholung des Kapitels Navier-Stokes:SMI, Kapitel 9 bzw. Vorlesung 8.
Bitte Kapitel 9 nachlesen!
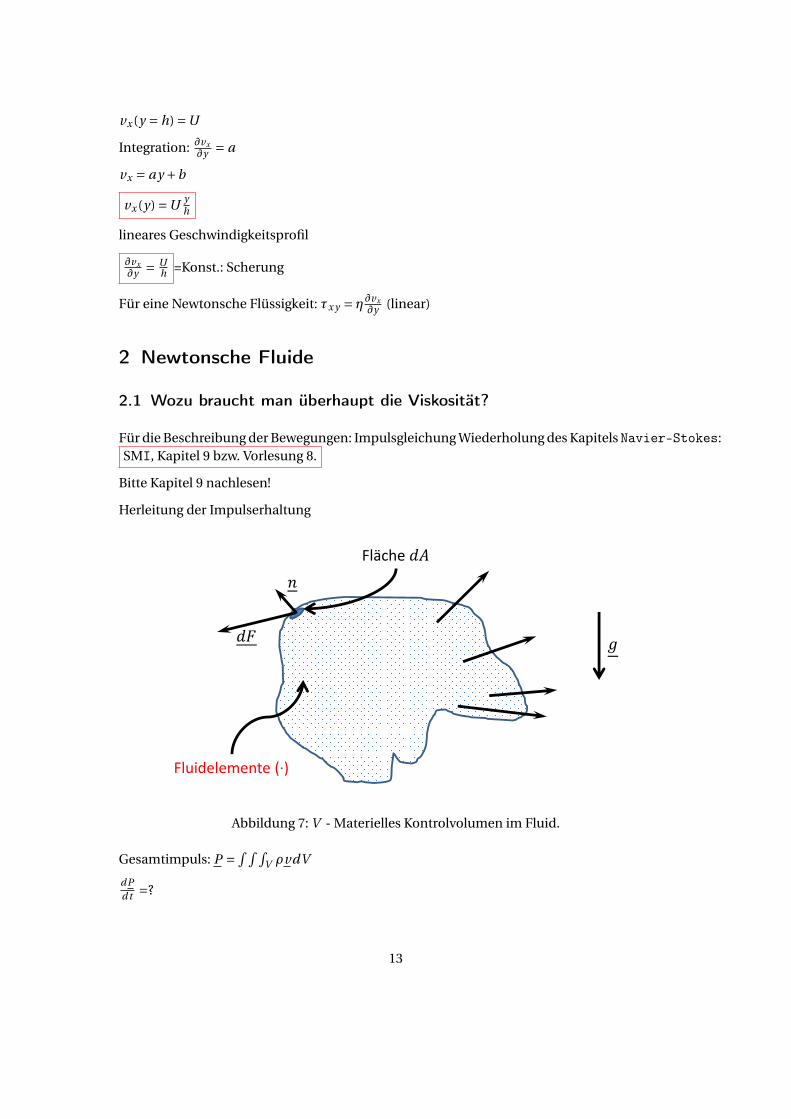
Herleitung der Impulserhaltung
Fluidelemente (∙)
Fläche
Abbildung 7: V - Materielles Kontrolvolumen im Fluid.
Gesamtimpuls: P = ∫ ∫ ∫V ρvdV
dPd t =?
13

Mathematiker: Physiker: 2. Gesetz von Newtond
d t
∫ ∫ ∫V ρvdV „Änderung des Impulses =
=Wirkung der Außenkräfte"→ Transporttheorem Kräfte?→ Reynolds-Theorem
„Volumenkräfte" „Kräfte auf derd
d t
∫ ∫ ∫V ρ
DvDt dV (long-range forces) Außenfläche"↑ Nur die Schwerkraft in (contact forces)
materielle der Strömungsmechanik (substanzielle) Druck- Reibungs-
Ableitung∫ ∫ ∫
V ρg dV kraft kraft
Da Druck- und Reibungskraft auf der Außenfläche wirken (und nur dort) ist es besser dieseKräfte durch eine Spannung zu ersetzen.
n: senkrechter Einheitsvektor, zeigt nach außen.
Kraft dF, [dF ] =N
Spannungsvektor t := dFd A [t ] = N/m2 = Pa.
Am einfachsten ist es, wenn dieser Spannungsvektor anhand eines Spannungstensors T be-schrieben wird.
Spannungstensor T
Spannungsvektor t = T ·n
Kraft: dF = (T ·n)d A
In der Strömungsmechanik wird statt T meistens σ verwendet.
Druckkraft: Tp =−pI .
mit I = 1 0 0
0 1 00 0 1
tp =−pI ·n =−pn
dFp = (−pd A)n ,
Tensor: σ=−pI︸︷︷︸+ τ︸︷︷︸↑ ↑
Beitrag der Beitrag der
Druckkraft Reibungskraft
14
Mathematik Physik∫ ∫ ∫V ρ
DVDt dV = ∫ ∫ ∫
V ρg dV + ∫ ∫A(σ ·n)d A
Schwerkraft Druckkraft & Reibungskraft
Integrale Form der Navier-Stokes Gleichung (Impulserhaltung)∫ ∫ ∫V ρ
DvDt dV = ∫ ∫ ∫
V ρg dV −∫ ∫A pnd A+∫ ∫
A τ ·nd A
Integralsatz von Gauss∫ ∫ → ∫ ∫ ∫ ∇(lokale Form) der Impulserhaltung
ρDvDt = ρg −∇p +∇·τ
Navier-Stokes Gleichung: universell gültig, ohne weitere Annahmen, sowohl für Newtonscheals auch für nicht-Newtonsche Fluide.
Frage: was ist τ (der Reibungstensor) und wie kann es beschrieben werden?
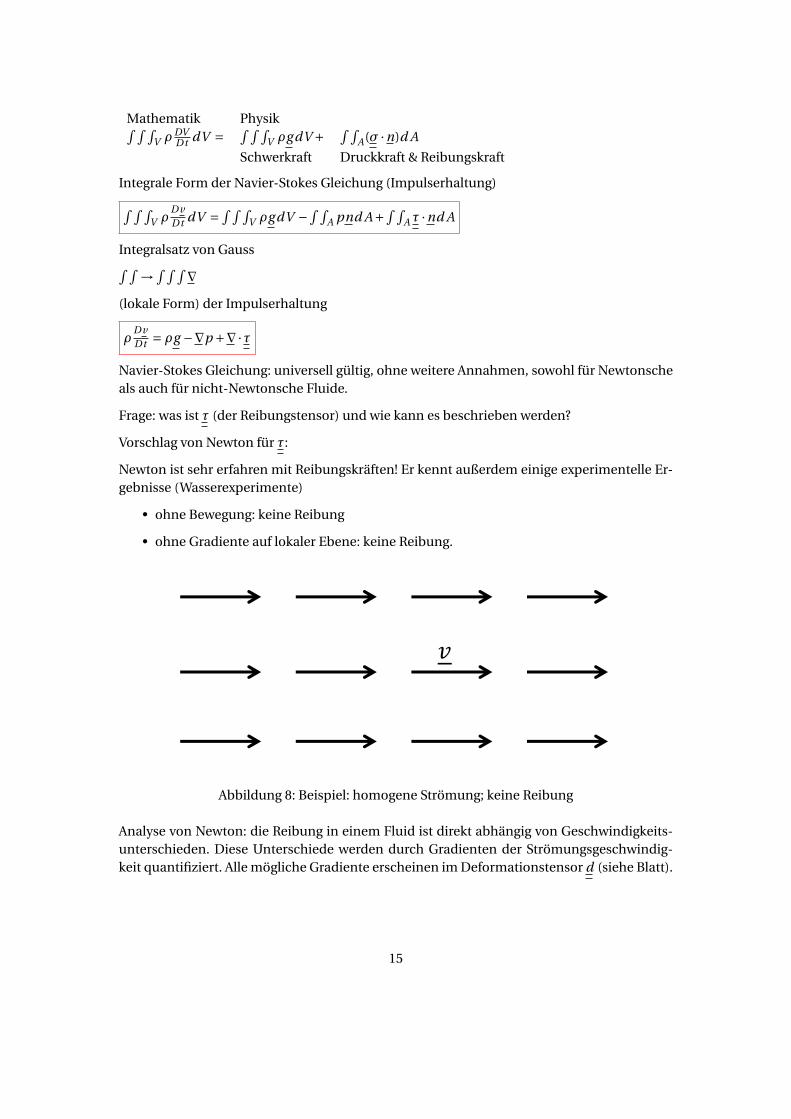
Vorschlag von Newton für τ:
Newton ist sehr erfahren mit Reibungskräften! Er kennt außerdem einige experimentelle Er-gebnisse (Wasserexperimente)
• ohne Bewegung: keine Reibung
• ohne Gradiente auf lokaler Ebene: keine Reibung.
Abbildung 8: Beispiel: homogene Strömung; keine Reibung
Analyse von Newton: die Reibung in einem Fluid ist direkt abhängig von Geschwindigkeits-unterschieden. Diese Unterschiede werden durch Gradienten der Strömungsgeschwindig-keit quantifiziert. Alle mögliche Gradiente erscheinen im Deformationstensor d (siehe Blatt).
15

Der einfachste mögliche Ansatz (der von Newton) ist daher
τ∝ d
↑ ↑gesucht Deformationstensor
Mit der jetzt standardisierten Schreibweise für eine Flüssigkeit gilt damit
τ= 2ηd (2.1)
η: die (Scher)viskosität [η] = Pa · s
[d ] = 1/s
[τ] = Pa
τ=
2η∂vx
∂x 2η12
(∂vx∂y + ∂vy
∂x
)2η1
2
(∂vx∂z + ∂vz
∂x
)2η1
2
(∂vx∂y + ∂vy
∂x
)2η
∂vy
∂y 2η12
(∂vy
∂z + ∂vz∂y
)2η1
2
(∂vx∂z + ∂vz
∂x
)2η1
2
(∂vy
∂z + ∂vz∂y
)2η∂vz
∂z
τ ist (wie erforderlich) symmetrisch, also τi , j = τ j ,i .
Der Ansatz von Newton ist perfekt für viele Fluide: Wasser, Luft, ideale Gase...
Alle Stoffe, die Gl. 2.1 erfüllen, werden Newtonsche Fluide (eigentlich Newtonsche Flüssig-keiten) genannt.
Aus Gl. 2.1 ist klar, dass solche Fluide nur einen Wert für die Viskosität besitzen: η
Kombiniert mit Navier-Stokes:
ρDvDt = ρg −∇p +∇τ (2.2)
Gl. 2.1 → Gl. 2.2 einsetzen.
Navier-Stokes als Komponentgleichung (skalare Gleichung)
ρDviDt = ρgi − ∂p
∂xi+ ∂τi , j
∂x j(j/j → Einsteinsche Summenkonvention)
ρDviDt = ρgi − ∂p
∂xi+
(∂τi ,1
∂x1+ ∂τi ,2
∂x2+ ∂τi ,3
∂x3
)
2.2 Navier-Stokes-Gleichung für eine Newtonsche Flüssigkeit mitkonstanter Viskosität
τi , j = η(∂vi∂x j
+ ∂v j
∂xi
)↑ konstant
16

∂τi j
∂x j= η
∂2vi
∂x j∂x j︸ ︷︷ ︸+∂∂x j
∂v j
∂xi︸︷︷︸
Einstein ∂2v1
∂x21+ ∂2v2
∂x22+ ∂2v3
∂x23
∂∂xi
(∂v1∂x1
+ ∂v2∂x2
+ ∂v3∂x3
)∇2vi - Laplace ∂
∂xi
(
0
∇· v
)wegen Massenerhaltung für eine inkompressible Strömung
Es kommt also:
ρDvDt = ρg −∇p +η∇2v (2.3)
Navier-Stokes-Gleichung für newtonsche Flüssigkeiten mit einer konstanten Viskosität.
2.3 Ein Wert für die Viskosität?
Wie zuletzt diskutiert, ist die Viskostät das Ergebnis von Wechselwirkungskräften auf Mole-külebene. → Als Ergebnis dieser Tatsache muss notwendigerweise η abhängig sein:
• von der Molekülstruktur („vom Stoff")
• von der Stärke der Wechselwirkungskräfte und damit
• von der Temperatur T ! (s. zweites Praktikum)
• vom Druck p? (für unsere Flüssigkeiten irrelevant (inkompressibel))
Fazit: Scherviskosität η=Funktion(Stoff, Temperatur)
Einfluß der Temperatur
→ Gas: Wechselwirkungskräfte = Stöße
T ↑ → stärkere Bewegungsschwankungen → mehr Stöße → η ↑→ Flüssigkeit: im Grundzustand ist die Molekülstruktur viel Stabiler als in einem Gas, da wei-tere Kräfte (van der Waals, Wasserstoff-Bindung. . .) existieren.
T ↑ → stärkere Bewegungsschwankungen → mehr Stöße aber gleichzeitig reduzierter Ein-
fluß der anderen, lokalen Wechselwirkungskräfte → insgesamt, i.A. η ↓
2.4 Couette-Strömung und graphische Darstellung der Viskosität
s. erstes Praktikum.
Ebene, stationäre Strömung, ohne Einfluss von Druckkraft und Schwerkraft.
17

Reibungsstensor τ: nur noch τx y = τy x , überall gleich.
Deformationstensor d : nur noch ∂vx∂y ; γ := ∂vx
∂y ist die Scherrate; [γ] = 1/s - überall gleich.
Für eine Newtonsche Flüssigkeit: τx y = η∂vx∂y
Scherviskosität = Anstieg
=
Sehr hohe Viskosität:
→ +∞
Verschwindend
geringe Viskosität:
→ 0
Abbildung 9: Fließkurve eines Newtonschen Fluids mit den Grenzfällen (links) und die dar-aus abgeleitete Viskositätskurve (rechts).
Aus der Fließkurve wird durch Ableitung die Viskositätskurve gezeichnet (s. Abbildung 9).
Woher kommt dann die Komplexität der „echten"Flüssigkeiten?
→ Wegen extrem hoher Unterschiede im Wert der Viskosität
Beispiel s. Tabelle 1
16 Dekaden zwischen kleinsten und größten Wert!
→ Weil bei weitem nicht alle Flüssigkeiten Newtonsche sind! Unser nächstes Thema...
3 Nicht-Newtonsche Fluide mit zeitunabhängiger Viskosität- Teil I.
3.1 Einführung
Es handelt sich zwar um nicht-Newtonsche Fluide, aber „einfache":
• η (Viskosität ändert) sich nicht mit der Zeit.
• die Fliesskurve startet weiterhin am Punkt (0,0): bei der kleinsten Beanspruchung be-ginnt sofort die Fluidbewegung.
Es bleiben dann 2 relevanten Familien:
18

Stoff (20°C) η in [mPa · s](0.001 Pa · s)
nur GrößenordnungenGase 0,01Aceton 0,3Benzin 0,6Wasser 1 (Zufall!)Ethanol 1,2Fruchtsäfte 2. . .5Milch 5Leichtöl 10Blut (37°C) 15Glykol 20Olivenöl 100Motoröl bis 1000Glyzerin 1500Flüssighonig 104
Bitumen 106
Glasschmelze (500°C) 1014
Tabelle 1: Viskosität unterschiedlicher Flüssigkeiten
• scherverdünnende Flüssigkeiten
• scherverdickende Flüssigkeiten
Die Viskosität solcher Fluide ist abhängig der Scherrate γ: η= η(γ) . (Vergleich NewtonscheFlüssigkeit: η=Konst.)
3.2 Scherverdünnendes Fließverhalten
3.2.1 Allgemeines
In diesem Fall zeigt die Fließkurve eine abnehmende Kurvensteigung: η nimmt mit wachsen-der Scherbelastung ab.
Scherverdünnend ≡• shear thinning (Eng.)
• pseudoplastisch
• strukturviskos
Beispiele:
• Polymerlösungen und -schmelzen
19

Abbildung 10: Fließ- und Viskositätskurven scherverdünnender Flüssigkeiten
• Kleister
• Lacke / Farben
• Schampoo
• Blut
In der Industrie und im Haushalt sind scherverdünnende Stoffe sehr verbreitet und beliebt.,
In der Praxis wird oft beobachtet, dass für sehr kleine und auch sehr große Werte von γ scher-verdünnende Flüssigkeiten ein Newtonsches Verhalten aufweisen (s. Abbildung 11).
Abbildung 11: Fließ- und Viskositätskurven scherverdünnender Flüssigkeiten, praxisnah
20
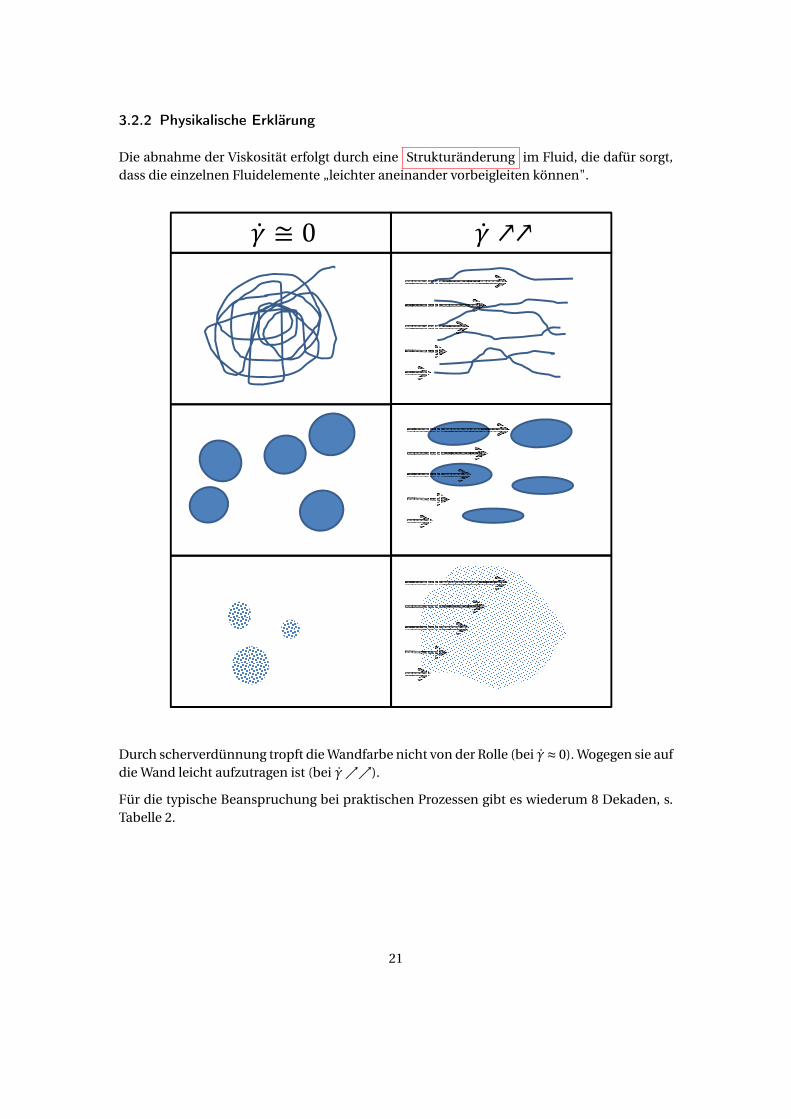
3.2.2 Physikalische Erklärung
Die abnahme der Viskosität erfolgt durch eine Strukturänderung im Fluid, die dafür sorgt,dass die einzelnen Fluidelemente „leichter aneinander vorbeigleiten können".
≅ 0
Durch scherverdünnung tropft die Wandfarbe nicht von der Rolle (bei γ≈ 0). Wogegen sie aufdie Wand leicht aufzutragen ist (bei γ).
Für die typische Beanspruchung bei praktischen Prozessen gibt es wiederum 8 Dekaden, s.Tabelle 2.
21

Vorgang Scherrate γ in 1/s
Größenordnung in etwaSedimentation / Schwerkrafteinwirkung 0,01Oberflächenfilm/Abtropfen 0,1Extrudieren 10Pressen (kauen) 100Rühren 1000Streichen, gießen, bürsten 10 000Mahlen, einreiben 105
Schmierung 106
Tabelle 2: Typische Größenordnung für die Beanspruchung unterschiedlicher Prozesse
3.2.3 Modell für die Viskosität
Es gibt ganz viele in der Literatur, heute das wichtigste: Ostwald-de Waele (Potenzgesetz)(Eng.: power-law)
τ= K ·γn K : Konsistenz, oder Fließkoeffizient [K ] = Pa · s für eine Newtonsche Flüssigkeitn: Potenz [n] = [1]
Für eine scherverdünnende Flüssigkeit: n < 1
(zum Vergleich: Newtonsche Fluide: τ= ηγ)
Also: η= K · γn−1 , mit n < 1
Beispiel: n = 0,5
τ= K ·√γ; η= Kpγ
Konst.
Abbildung 12: Scherverdünnendes Fließverhalten: Polymer, Suspensionen, Aggregate
Ein Problem mit dem Potenzgesetz:
22
limγ→0
η=+∞
limγ→∞
η= 0
Beide Gleichungen sind unrealistisch → Lösung: Potenzgesetz für γmi n ≤ γ≤ γmax
Ergänzt durch:Für γ≤ γmi n : η= η0
Für γ≥ γmax : η= η∞
3.3 Scherverdickendes Fließverhalten
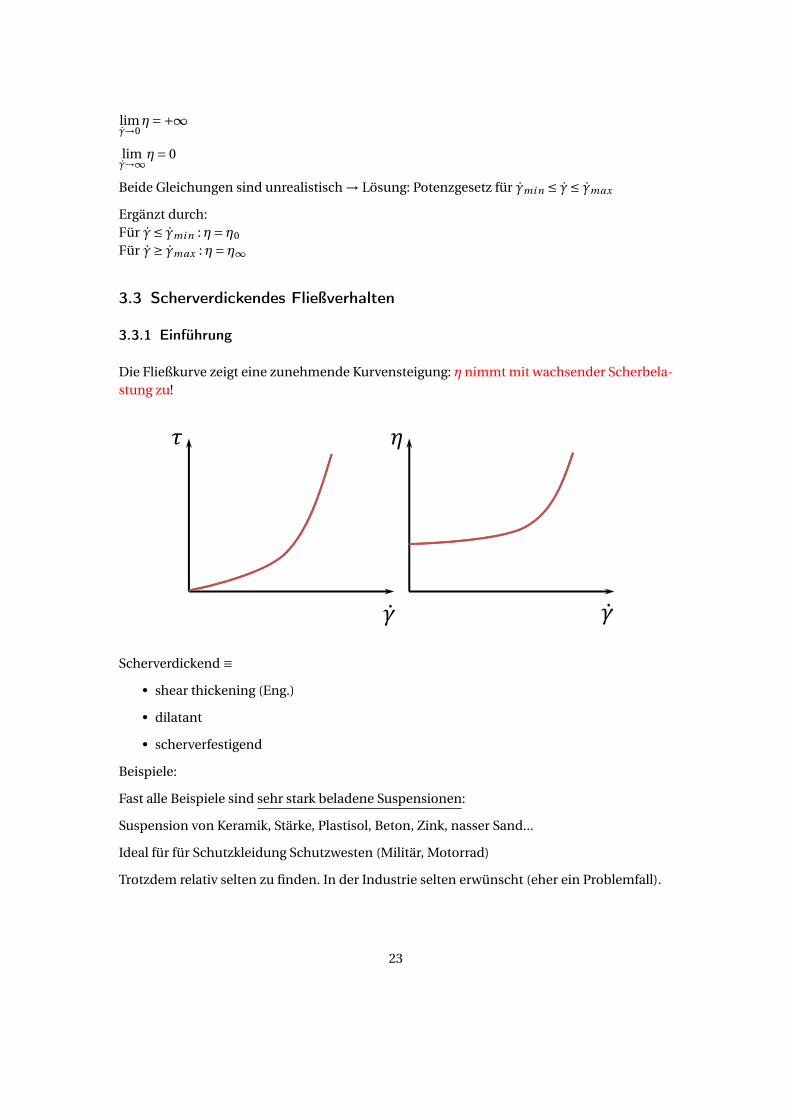
3.3.1 Einführung
Die Fließkurve zeigt eine zunehmende Kurvensteigung: η nimmt mit wachsender Scherbela-stung zu!
Scherverdickend ≡• shear thickening (Eng.)
• dilatant
• scherverfestigend
Beispiele:
Fast alle Beispiele sind sehr stark beladene Suspensionen:
Suspension von Keramik, Stärke, Plastisol, Beton, Zink, nasser Sand...
Ideal für für Schutzkleidung Schutzwesten (Militär, Motorrad)
Trotzdem relativ selten zu finden. In der Industrie selten erwünscht (eher ein Problemfall).
23

3.3.2 Physikalische Erklärung
Ebenfalls eine Strukturveränderung: „Verkantung"der Partikel in einer Suspension.
• γ∼= 0: hohe Ordnung in der Flüssigkeit (Van der Waals-Kraft, Wasserstoffbindung).
• γ : Struktur ändert sich, Flockung/Koagulation setzt ein. Eine erhöhte Scherrateführt zur Bildung neuer Strukturen: Partikel berühren sich mehr, verkanten sich ⇒ er-höhte Fließwiderstand.
Bekannt ist aus der Praxis, dass hierfür Partikelform, -konzentration und -größenverteilungausschlaggebend sind: ein sehr komplexer Vorgang!
3.3.3 Modell für die Viskosität
Erneut das Potenzgesetz:
τ= K · γn , mit n > 1
da τ= ηγ
η= K · γn−1
Beispiel: n = 3 → η= K · γ2
limγ→+∞
η=+∞
limγ→0
η= 0
nicht realistisch!
Das Potenzmodell kann eigentlich alle 3 Verhalten gleich beschreiben: sehr praktisch!
• scherverdickend: n > 1
24
• scherverdünnend: n < 1
• Newtonsches Verhalten: n = 1
4 Nicht-Newtonsche Fluide mit zeitunabhängiger Viskosität- Teil II.
4.1 Einleitung: zurück zum Potenzgesetz
Siehe wieder Matlab-Script für Fließ-/Viskositätskurven auf der Webseite
Potenzgesetz (Ostwald-de Waele)
τ= K γn n = 1: Newton
η= K γn−1 K = 1
Überall für: n < 1 - scherverdünnend (z.B. n = 0,4)
n > 1 - scherverdickend (z.B. n = 1,4)
Problem:
Für n < 1 (scherverdünnend)
limγ→0
η=+∞⇔ nicht realistisch
limγ→+∞
η= 0 ⇔ nicht realistisch
Für n > 1 (scherverdickend)
limγ→0
η= 0 ⇔ nicht realistisch
limγ→+∞
η=+∞⇔ nicht realistisch
Wie kann eine realistischere Darstellung abgeleitet werden?
4.2 Viskositätsgrenze
Unter realistischen Bedingungen wird für Fließvorgänge weder η= 0 noch η=+∞ erreicht.
Üblicherweise wird
• limγ→0
η= η0, Nullviskosität genannt.
25
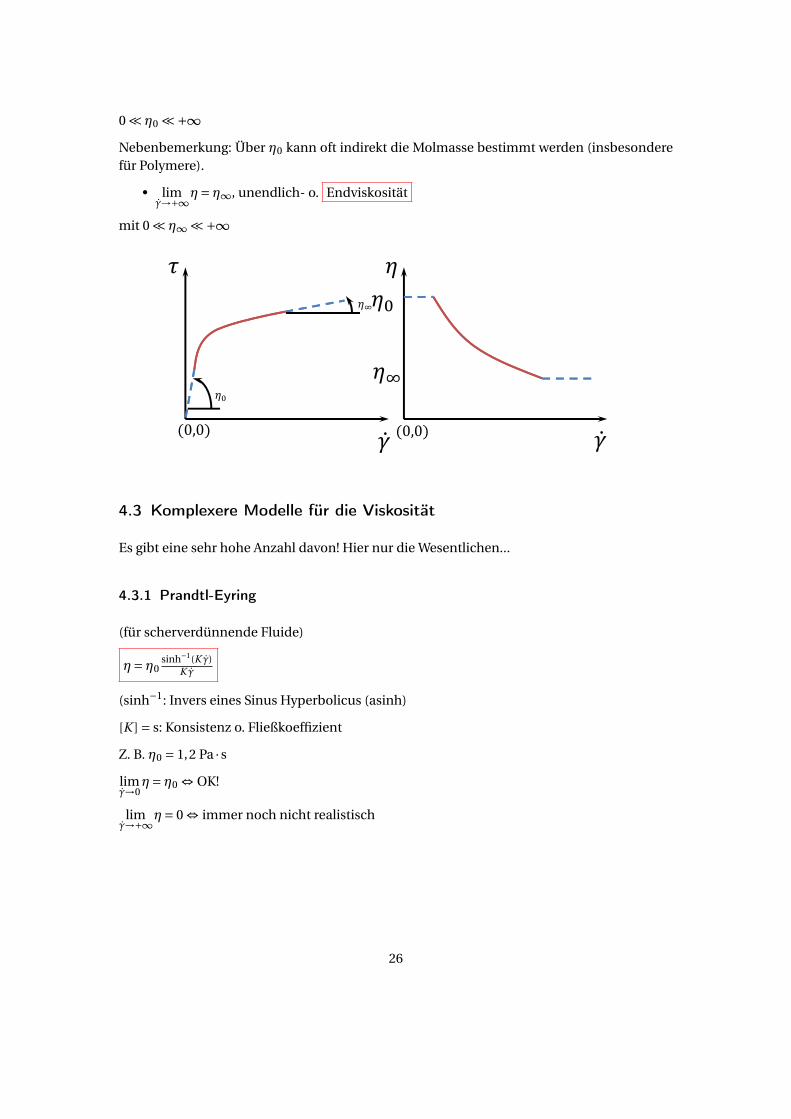
0 ¿ η0 ¿+∞Nebenbemerkung: Über η0 kann oft indirekt die Molmasse bestimmt werden (insbesonderefür Polymere).
• limγ→+∞
η= η∞, unendlich- o. Endviskosität
mit 0 ¿ η∞ ¿+∞
0,0 0,0
4.3 Komplexere Modelle für die Viskosität
Es gibt eine sehr hohe Anzahl davon! Hier nur die Wesentlichen...
4.3.1 Prandtl-Eyring
(für scherverdünnende Fluide)
η= η0sinh−1(K γ)
K γ
(sinh−1: Invers eines Sinus Hyperbolicus (asinh)
[K ] = s: Konsistenz o. Fließkoeffizient
Z. B. η0 = 1,2 Pa · s
limγ→0
η= η0 ⇔ OK!
limγ→+∞
η= 0 ⇔ immer noch nicht realistisch
26
4.3.2 Powell-Eyring
Für scherverdünnende Stoffe entworfen, prinzipiell aber auch für scherverdickende nutzbar.
η−η∞η0−η∞ = sinh−1(K γ)
K γ , mit [K ] = s die Konsistenz
limγ→0
η= η0 ⇔ OK
limγ→+∞
η= η∞ ⇔ OK
4.3.3 Carreau-Yasuda
Ein weit verbreitetes Modell!
η−η∞η0−η∞ = [
1+ (K γ)a] n−1
a
• [K ] = s, die Konsistenz
• n: Potenzwert
• a: quantifiziert, wie schnell der Übergang zwischen η0 und η∞ erfolgt (Steifheit).
Gültig für
• n = 1 Newton
• n < 1 scherverdünnend (dafür ist das Modell entwickelt worden)
• n > 1 scherverdickend (dafür natürlich notwendig: η∞ > η0)
1K - Größenordnung, ab welchem Wert für γ der Übergang zwischen η0 und η∞ spürbar ist.
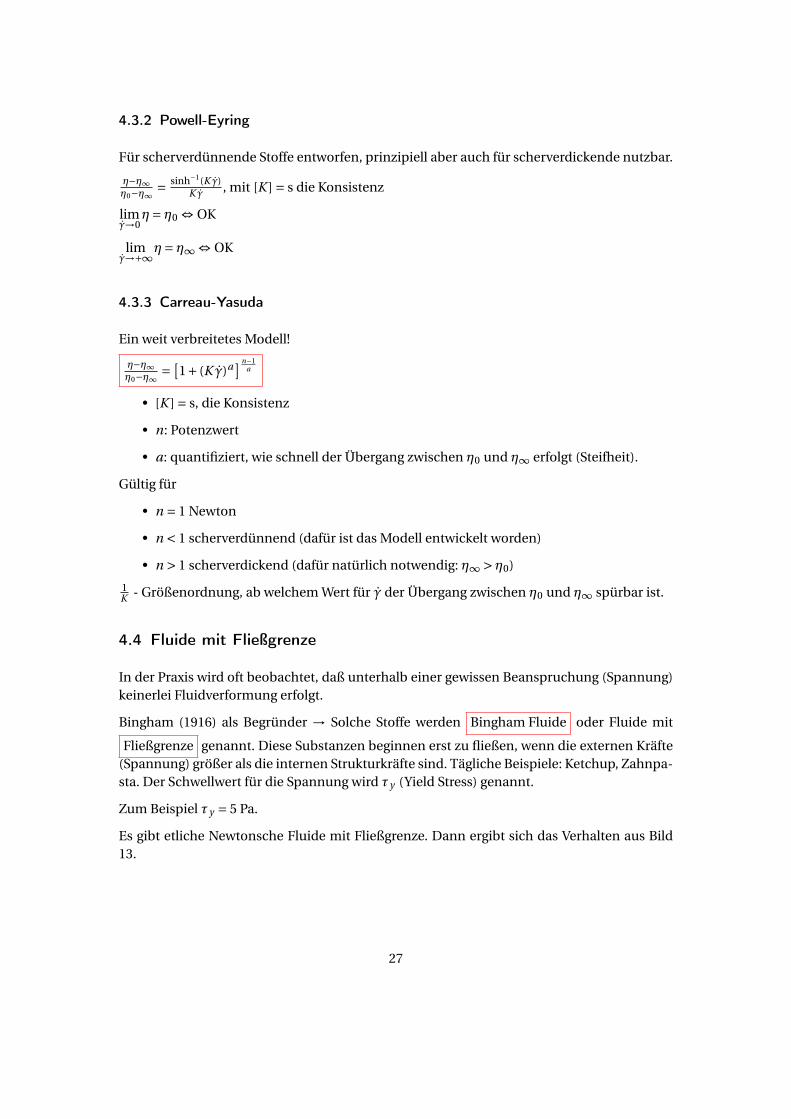
4.4 Fluide mit Fließgrenze
In der Praxis wird oft beobachtet, daß unterhalb einer gewissen Beanspruchung (Spannung)keinerlei Fluidverformung erfolgt.
Bingham (1916) als Begründer → Solche Stoffe werden Bingham Fluide oder Fluide mit
Fließgrenze genannt. Diese Substanzen beginnen erst zu fließen, wenn die externen Kräfte(Spannung) größer als die internen Strukturkräfte sind. Tägliche Beispiele: Ketchup, Zahnpa-sta. Der Schwellwert für die Spannung wird τy (Yield Stress) genannt.
Zum Beispiel τy = 5 Pa.
Es gibt etliche Newtonsche Fluide mit Fließgrenze. Dann ergibt sich das Verhalten aus Bild13.
27
∞
ohne Fließgrenze
mit Fließgrenze
0,0 0,0
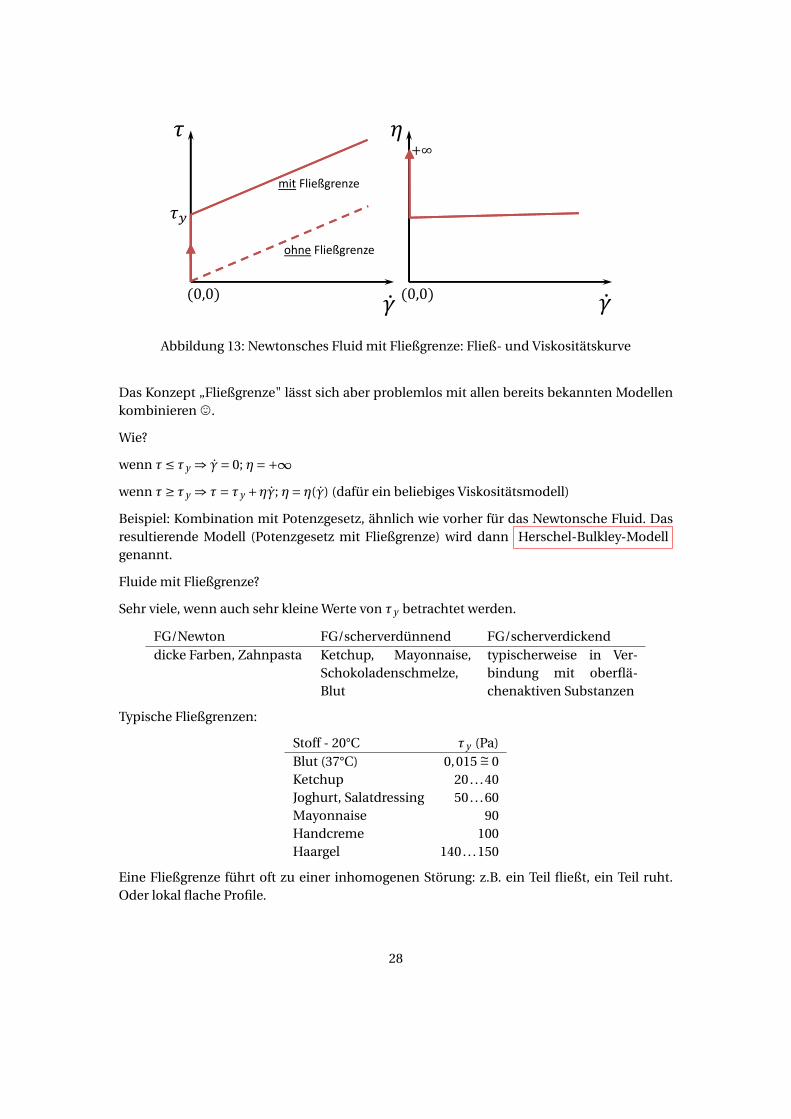
Abbildung 13: Newtonsches Fluid mit Fließgrenze: Fließ- und Viskositätskurve
Das Konzept „Fließgrenze" lässt sich aber problemlos mit allen bereits bekannten Modellenkombinieren ,.
Wie?
wenn τ≤ τy ⇒ γ= 0; η=+∞wenn τ≥ τy ⇒ τ= τy +ηγ; η= η(γ) (dafür ein beliebiges Viskositätsmodell)
Beispiel: Kombination mit Potenzgesetz, ähnlich wie vorher für das Newtonsche Fluid. Dasresultierende Modell (Potenzgesetz mit Fließgrenze) wird dann Herschel-Bulkley-Modellgenannt.
Fluide mit Fließgrenze?
Sehr viele, wenn auch sehr kleine Werte von τy betrachtet werden.
FG/Newton FG/scherverdünnend FG/scherverdickenddicke Farben, Zahnpasta Ketchup, Mayonnaise,
Schokoladenschmelze,Blut
typischerweise in Ver-bindung mit oberflä-chenaktiven Substanzen
Typische Fließgrenzen:
Stoff - 20°C τy (Pa)Blut (37°C) 0,015 ∼= 0Ketchup 20. . .40Joghurt, Salatdressing 50. . .60Mayonnaise 90Handcreme 100Haargel 140. . .150
Eine Fließgrenze führt oft zu einer inhomogenen Störung: z.B. ein Teil fließt, ein Teil ruht.Oder lokal flache Profile.
28
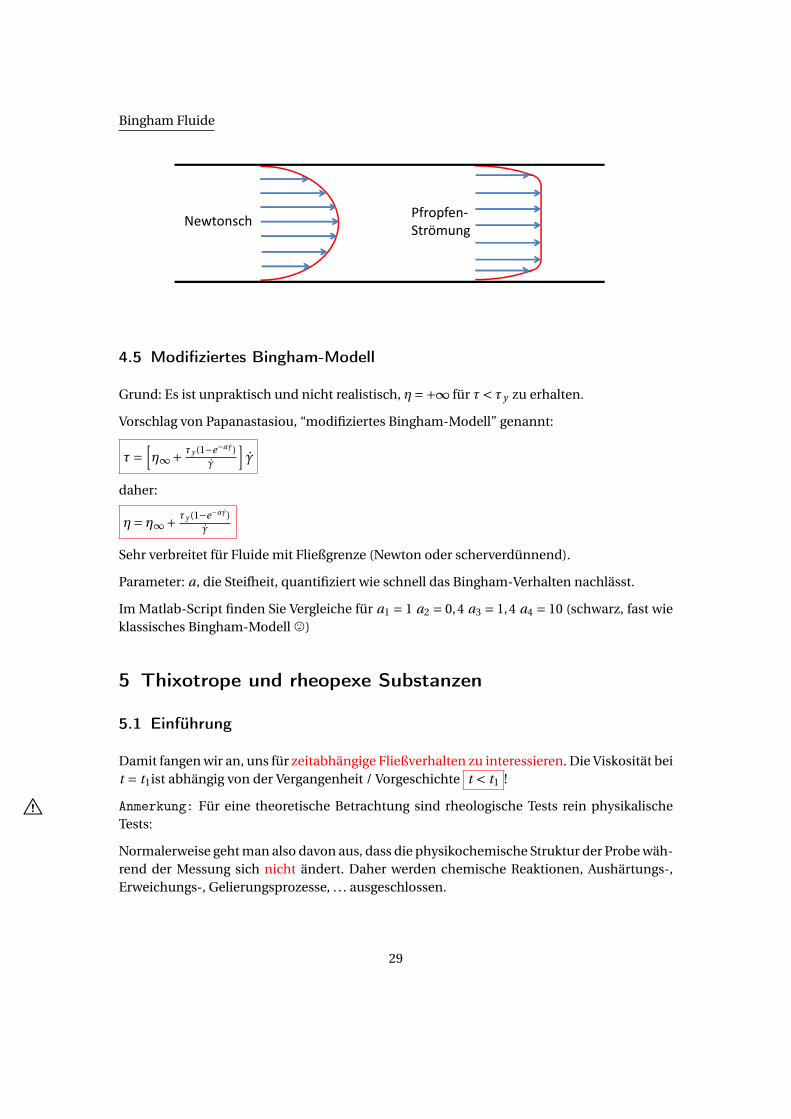
Bingham Fluide
Newtonsch Pfropfen‐Strömung
4.5 Modifiziertes Bingham-Modell
Grund: Es ist unpraktisch und nicht realistisch, η=+∞ für τ< τy zu erhalten.
Vorschlag von Papanastasiou, “modifiziertes Bingham-Modell” genannt:
τ=[η∞+ τy (1−e−aγ)
γ
]γ
daher:
η= η∞+ τy (1−e−aγ)γ
Sehr verbreitet für Fluide mit Fließgrenze (Newton oder scherverdünnend).
Parameter: a, die Steifheit, quantifiziert wie schnell das Bingham-Verhalten nachlässt.
Im Matlab-Script finden Sie Vergleiche für a1 = 1 a2 = 0,4 a3 = 1,4 a4 = 10 (schwarz, fast wieklassisches Bingham-Modell ,)
5 Thixotrope und rheopexe Substanzen
5.1 Einführung
Damit fangen wir an, uns für zeitabhängige Fließverhalten zu interessieren. Die Viskosität beit = t1ist abhängig von der Vergangenheit / Vorgeschichte t < t1 !
Anmerkung: Für eine theoretische Betrachtung sind rheologische Tests rein physikalischeBTests:
Normalerweise geht man also davon aus, dass die physikochemische Struktur der Probe wäh-rend der Messung sich nicht ändert. Daher werden chemische Reaktionen, Aushärtungs-,Erweichungs-, Gelierungsprozesse, . . . ausgeschlossen.
29
Allerdings
• sind diese Prozesse in der Praxis von großer Bedeutung!
• lassen sich diese Prozesse nicht immer vermeiden!
In der Praxis bleiben wir also ab jetzt pragmatisch:
• was sich vermeiden lässt, wird natürlich vermieden;
• was niemanden interessiert, wird nicht betrachtet;
• ansonsten berücksichtigen wir im rheologischen Modell sehr wohl chemische Ände-rungen der Struktur!
5.2 Thixotropes Verhalten
5.2.1 Einführung
Thixotropie ist mit Scherverdünnung verwandt (und dementsprechend auch weit verbreitet).
Man könnte Scherverdünnung ≡ als „Thixotropie mit schlagartiger Wirkung und Relaxati-on"definieren.
Def.: Thixotropes Verhalten bedeutet die Verringerung der Viskosität während einer Scher-Bbelastungsphase und der vollständigen Wiederaufbau während der nachfolgenden Ruhe-phase (siehe Bild 14).
“Vollständig” ⇒ Thixotropie ist reversibel.
Dieser Vorgang ist allerdings quantitativ (manchmal sogar qualitativ) abhängig von γ !
Meistens wird in der Praxis beobachtet:
• Wirkungszeit < Relaxationszeit
• Strukturänderung ist schneller für größere Beanspruchung, d.h. Wirkungszeit fürγ
Beispiele für thixotrope Substanzen: viele (noch mehr, wenn alle scherverdünnende Stoffedazu gezählt werden)!
• Grenze zwischen scherverdünnend und thixotrop (Wirkungszeit ta < tr < 1 s): Zahn-paste, Rasiercreme, Schlagsahne aus Druckflaschen. . .
• Eine Mehrheit aller Pasten, Cremes, Druckfarben, Gele. . .
• Ketchup: bei gleichmäßigem Schütteln oder Rühren wird Ketchup dünnflüssiger. Rela-xationszeit je nach Marke etwa 10 Min bei 20°C (Gelierungsprozess).
• schweres Paraffinöl: wird beim Schütteln schlagartig dünnflüssig. Relaxationszeit ca. 8Stunden bei 20°C.
30

Wirkungszeit Relaxationszeit
Konst ≫ 0 0
Abbildung 14: Thixotropes Verhalten, mit Definition der Wirkungszeit bzw. Aktivationszeit ta
und der Relaxationszeit tr
• Tonerde, Knetmasse, Keramikschlicker, Schlämme
• Hyaluronsäure (Gelenkflüssigkeit) ⇒ vor dem Sport aufwärmen!
• Thixotropes Öl: um zu schmieren, wo es nicht tropfen darf (z.B. bei der Schmierungvon Standuhren).
Thixotropie, eine Gefahr:
Tonerde, Schlamm, Quickerde, Quickton, Treibsand sind alle stark Thixotrop. In tonartigenSedimenten kann durch mechanische Beanspruchung (z.B. durch Erdbeben, Druck wegeneindringendem Wasser) ein Wechsel von fest zu fließfähig auftreten → Ursache für Damm-oder Deichbrüche, Schlammlawinen.
5.2.2 Pseudo-Thixotropie
Eine Substanz, die in der Scherphase Strukturabbau zeigt, aber die ursprüngliche Struktur-stärke nach einer „unendlich"langen Ruhezeit nicht aufweist, ist pseudo-thixotrop.
In diesem Fall findet eine irreversible, bleibende Strukturveränderung statt. Hier sollte manvon einer partiellen Regenerierung sprechen, z.B. „Nach einer Scherbelastung bei 1000 s−1
31
während 30 s erfolgte in 120 s die Regeneration der Viskosität auf 70% des Ruhewertes".
⇒ noch mehr Parameter/Einflußgröße
⇒ noch schwieriger, sauber zu charakterisieren.
Nicht-thixotrop: z.B. Joghurt. Selbst nach einer längeren Zeit bleibt Joghurt nach einem kräf-tigen Rühren deutlich dünnflüssiger als vor dem Rühren.
5.3 Rheopexes Verhalten
5.3.1 Einführung
Rheopexie ist mit Scherverdickung verwandt (und dementsprechend weniger verbreitet).
Scherverdickung ≡ „Rheopexie mit schlagartiger Wirkung und Relaxation".
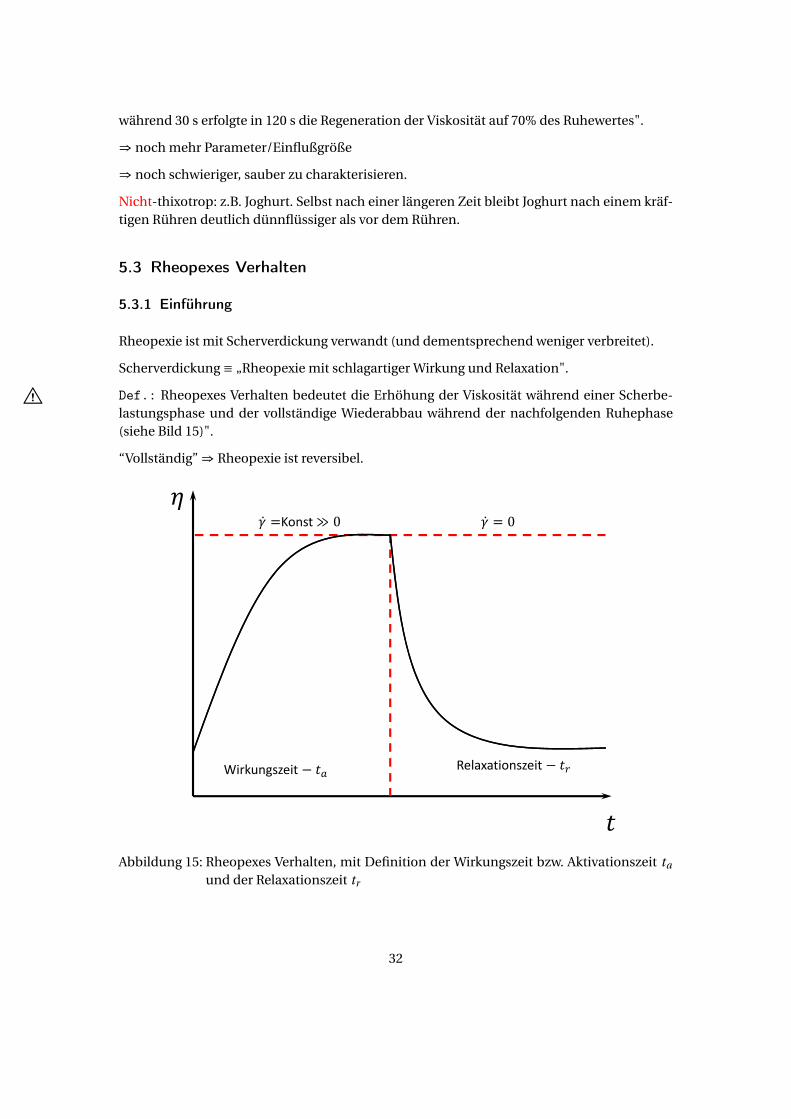
Def.: Rheopexes Verhalten bedeutet die Erhöhung der Viskosität während einer Scherbe-Blastungsphase und der vollständige Wiederabbau während der nachfolgenden Ruhephase(siehe Bild 15)".
“Vollständig” ⇒ Rheopexie ist reversibel.
Wirkungszeit Relaxationszeit
Konst ≫ 0 0
Abbildung 15: Rheopexes Verhalten, mit Definition der Wirkungszeit bzw. Aktivationszeit ta
und der Relaxationszeit tr
32

Note: relativ oft kann die gleiche Mischung thixotrop oder rheopex sein, ja nach genaueBZusammensetzung/Konzentration/Partikelgrößenverteilung (PSD)/Scherrate)! Häufig kanndas Verhalten (thixotrop bzw. rheopex) durch Zugabe kleinster Mengen an Oberflächenakti-vensubstanzen (Tenside) “umkippen” (z.B. für Keramikschlicker).
Beispiele für rheopexe Substanzen: relativ selten, meist unerwünscht, da rheopexe Substan-zen inhomogen fließen(Wandgleiteffekte, Entmischung, Pfropfenbildung)
• Keramikschlicker
• Latex-Dispersion
• hochkonzentrierte Proteinsuspension
• Kohlesuspension
• Plastisolen
• Neu: Sportanwendungen, Schuhsohlen von Sportschuhen
5.3.2 Pseudo-Rheopexie
Für reversible Vorgänge, ähnlich der Pseudo-Thixotropie, mit partieller Regeneration der Vis-kosität, die höher liegt als der Anfangswert.
5.4 Viskositätsmodelle für zeitabhängige Substanzen
5.4.1 Einfacher Ansatz
In bereits bekannten Modellen werden die relevanten Parameter zeitabhängig geschrieben.
τy (t ), η(t ) Funktionen der Zeit
Dies ist ein offensichtlich „primitiver"Ansatz: alle Details der Strukturänderung werden igno-riert und nur nachträglich per Modellanpassung näherungsweise beschrieben.
5.4.2 Ansatz mit Strukturparameter
In komplexeren aber weiterhin vorwiegend qualitativen Modellen wird die Strukturänderungmit einem dimensionslosen Strukturparameter ξ quantifiziert:
• ξ= 1: Das Fluid is „perfekt"strukturiert (Ruhezustand vor/nach der Beanspruchung)
• ξ= 0: maximale Strukturänderung wurde erreicht.
• 1 > ξ> 0: während der Beanspruchung bzw. Relaxation.
Dazu werden dann zwei gekoppelte Gleichungen zur Beschreibung benötigt:
33

• Beziehung τ− γ liefert die Viskosität für einen bestimmten Wert von ξ
• Beziehung ξ(t ) liefert die Wert von ξ. Diese Beschreibung verläuft ähnlich wir eine re-versible chemische Reaktion.
Meistens wird am Ende das Modell von Houska verwendet (Erweiterung von Herschel-Bulkley).
τ− γ τ= (τy +τy1ξ)+ (K0 +K1ξ)γn
ξ(t ) ξ= dξd t = a(1−ξ)−bξγε
wobei τy , K0, n: Standard-Parameter, ohne Strukturänderung
und τy1, K1: Parameterwerte der Zeitabhängigkeit für die Strukturänderung. Annahme: li-neare Abhängigkeit von ξ.
Die zweite Gleichung ist die kinetische Gleichung mit zwei Komponenten:
• a(1−ξ): Strukturaufbauterm, ξ nimmt zu (für γ= 0 - 2. Phase, d.h. Relaxation)
• bξγε: Strukturabbauterm, ξnimmt ab (γ=Konst. - 1. Phase, d.h. Beanspruchung); Funk-tion von γ.
Insgesamt 8 Modellparameter (komplex!):
• Modell-, Stoffparameter: τy , K0, n bzw. τy1, K1
• kinetische Parameter: a, b, ε
• /: viele Messungen sind notwendig
• ,: sehr viele Fluide können hiermit gut beschrieben werden
5.5 Messungen für Thixotropie / Rheopexie
Natürlich zeitabhängige Messungen!
5.5.1 Scherratengeregelt: Vorgabe von γ
Das ist aktueller Stand der Technik. Hiermit können akkurat:
• Aktivations- und Relaxationszeit z.B. auf Basis der Tangenten-Methode ermittelt wer-den (Bild 16),
• die Neigung zur Thixotropie oder Rheopexie auf Basis der Hysterefläche (Flächendiffe-renz zwischen 2 Kurven) (Bild 17),
quantifiziert werden.
34
Ruhe
Belastung
Relaxation
10
10 Zeit bis 50% Regeneration
~60 s ~60 s ~180 s
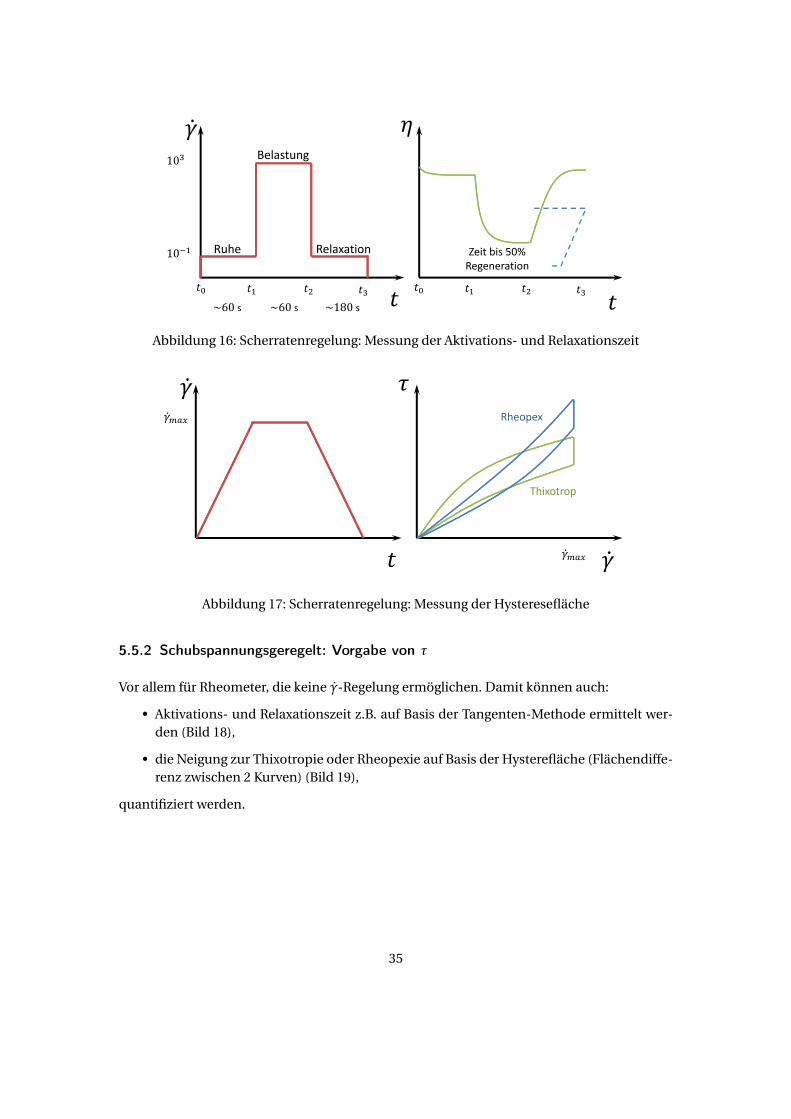
Abbildung 16: Scherratenregelung: Messung der Aktivations- und Relaxationszeit
Rheopex
Thixotrop
Abbildung 17: Scherratenregelung: Messung der Hysteresefläche
5.5.2 Schubspannungsgeregelt: Vorgabe von τ
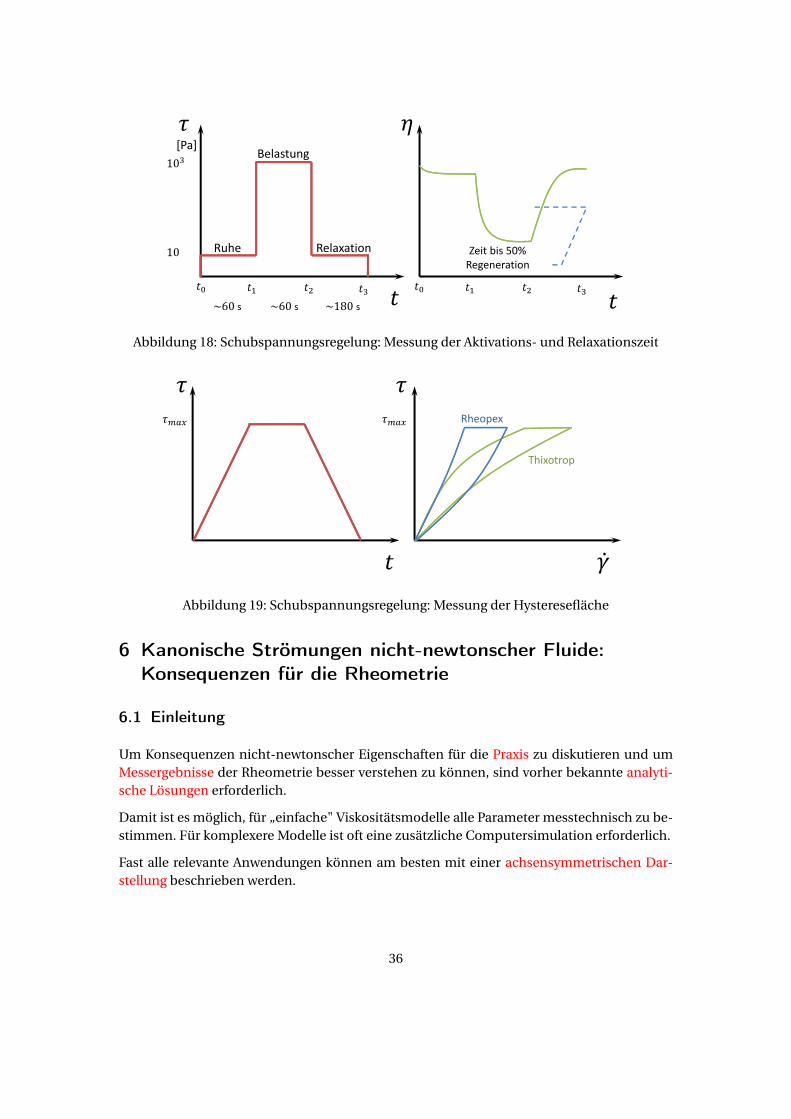
Vor allem für Rheometer, die keine γ-Regelung ermöglichen. Damit können auch:
• Aktivations- und Relaxationszeit z.B. auf Basis der Tangenten-Methode ermittelt wer-den (Bild 18),
• die Neigung zur Thixotropie oder Rheopexie auf Basis der Hysterefläche (Flächendiffe-renz zwischen 2 Kurven) (Bild 19),
quantifiziert werden.
35
[Pa]
Ruhe
Belastung
Relaxation
10
10 Zeit bis 50% Regeneration
~60 s ~60 s ~180 s
Abbildung 18: Schubspannungsregelung: Messung der Aktivations- und Relaxationszeit
Rheopex
Thixotrop
Abbildung 19: Schubspannungsregelung: Messung der Hysteresefläche
6 Kanonische Strömungen nicht-newtonscher Fluide:Konsequenzen für die Rheometrie
6.1 Einleitung
Um Konsequenzen nicht-newtonscher Eigenschaften für die Praxis zu diskutieren und umMessergebnisse der Rheometrie besser verstehen zu können, sind vorher bekannte analyti-sche Lösungen erforderlich.
Damit ist es möglich, für „einfache" Viskositätsmodelle alle Parameter messtechnisch zu be-stimmen. Für komplexere Modelle ist oft eine zusätzliche Computersimulation erforderlich.
Fast alle relevante Anwendungen können am besten mit einer achsensymmetrischen Dar-stellung beschrieben werden.
36

6.2 Ausgangslösung für eine inkompressible Strömung imachsensymmetrischen System
(Zylinder)Koordinaten: Strömungsgeschwindigkeit:
6.2.1 Allgemeine Lösung
Massenerhaltung: ρ=konst. (inkompressibel) ∇· v = 0
1r∂(r vr )∂r + 1
r∂vφ∂φ + ∂vz
∂z = 0
Impulserhaltung:
ρ
(∂vr∂t + vr
∂vr∂r + vφ
r∂vr∂φ + vz
∂vr∂z − v2
φ
r
)= ρgr − ∂p
∂r + ∂τr r∂r + 1
r∂τrφ
∂φ + τr r −τφφr
ρ(∂vφ∂t + vr
∂vφ∂r + vφ
r∂vφ∂φ + vz
∂vφ∂z + vr vφ
r
)= ρgφ− 1
r∂p∂φ + ∂τrφ
∂r + 1r∂τφφ∂φ + ∂τφz
∂z +2τφr
r
ρ(∂vz∂t + vr
∂vz∂r + vφ
r∂vz∂φ + vz
∂vz∂z
)= ρgz − ∂p
∂z + ∂τr z∂r + 1
r∂τφz
∂φ + ∂τzz∂z + τzr
r
Jetzt suchen wir aber ausschließlich:
• stationäre Lösungen: ∂∂t = 0
• Strömungen ohne Einfluss der Schwerkraft (eben)
• einfache eindimensionale Strömungen in der Form
vr = 0
vφ = 0
vz = vz (r )
⇒ nicht z-abhängig, „unendliche"Strömung
37

• Strömungen getrieben durch einen konstanten Druckgradient.
Π=−∂p∂z =konst.
Mit diesen Annahmen:
1. ist die Massenerhaltung automatisch erfüllt (vr = 0; vφ = 0; ∂vz∂z = 0) und
2. vereinfacht sich die Impulserhaltung gewaltig:
∂p
∂r= ∂τr r
∂r+ 1
r
∂τrφ
∂φ+ τr r −τφφ
r(6.1)
1
r
∂p
∂φ= ∂τrφ
∂r+ 1
r
∂τφφ
∂φ+ ∂τφz
∂z+2
τφr
r
∂p
∂z= ∂τr z
∂r+ 1
r
∂τφz
∂φ+ ∂τzz
∂z+ τzr
r
Im Analogie zum Newtonschen Fluid definieren wir die (Scher-)Viskosität η mit
η := τ
2d
oder
τ= 2ηd
In Zylinderkoordinaten ist der Deformationstensor:
d =
∂vr∂r
12
(1r∂vr∂φ − vφ
r + ∂vφ∂r
)12
(∂vr∂z + ∂vz
∂r
)12
(1r∂vr∂φ − vφ
r + ∂vφ∂r
)1r∂vφ∂φ + vr
r12
(∂vφ∂z + 1
r∂vz∂φ
)12
(∂vr∂z + ∂vz
∂r
)12
(∂vφ∂z + 1
r∂vz∂φ
)∂vz∂z
d : symmetrisch.
Hier: vr = 0; vφ = 0; vz = vz (r ).
Es bleibt nur:
d =
0 0 12∂vz∂r
0 0 012∂vz∂r 0 0
Daher
τ=
0 0 η∂vz∂r
0 0 0
η∂vz∂r 0 0
38

Nur τr z = τzr = η∂vz∂r ist nicht null, sondern É 0!
oder
τr z = τzr =−ηγmit
γ=−∂vz∂r =−d vz
dr .
wobei γ (ein positiver Wert) die Scherrate ist (in dieser Strömung nicht uniform).
Aus Gl. 6.1 ⇒• ∂p
∂r = 0
• ∂p∂φ = 0
• ∂p∂z =−Π= ∂τr z
∂r + τzrr = 1
r∂(rτr z )∂r
Druckgradient:Π=Konst.=-∂p∂z
Daher integriert als: p(r,φ, z) = p(z) =−Πz + c
∂(rτr z )∂r =−Πr
Kann sofort integriert werden:
rτr z =−Π r 2
2 +Konst.
τr z =−Π r2 + Konst.
r
Ein unendliche Wert auf Achse (r = 0) wäre unphysikalisch → Konst.=0:
τr z =−Πr2
oder
39

ηγ= Πr
2(6.2)
Um weiter zu kommen, gibt es zwei Möglichkeiten:
1. Viskositätsmodell ist gegeben, dann Ergebnisse ableiten.
2. Viskosität ist unbekannt, die Messung liefert η.
6.2.2 Lösung für Potenzgesetz
d.h. η= K γn−1
Also für Gl. 6.2
K γn = Πr2
γ=(Π
2K
)1/nr 1/n =−d vz
dr
Integration:
vz = vz (r ) = Konst.− 11+ 1
n
(Π
2K
) 1n
r1n +1
Randbedingung (Haft): vz (r = R) = 0
Dadurch
vz (r ) = 11+ 1
n
(Π
2K
) 1n[
R1+ 1n − r 1+ 1
n
]oder
vz (r ) = R
1+ 1n
(ΠR
2K
) 1n [
1−( r
R
)1+ 1n
](6.3)
Der Volumenstrom q lautet:
q =r=R∫r=0
2πr vz (r )dr (über einen beliebigen Querschnitt)
Aus Gl.6.3 folgt:
q =(ΠR
2K
) 1n πR3
3+ 1n
(6.4)
Vergleich (6.3) und (6.4):
40

vz (r ) = q
πR2
3+ 1n
1+ 1n
[1−
( r
R
)1+ 1n
](6.5)
Klassische Lösung für ein Fluid mit Potenzgesetz.
Wandscherrate: γw =−d vzdr |r=R
Es kommt aus Gl. 6.5
γw = qπR2
(3+ 1
n
) r1n
R1+ 1n|r=R
γw = q
πR3
(3+ 1
n
)(6.6)
6.2.3 Newtonsches Verhalten mit Fließgrenze
Wir wissen (6.2): τr z = τzr =−Πr2 ≤ 0.
Für |τ| < τy : keine Verformung (d = 0 bzw. γ= 0)
|τr z | = 0 auf der Achse (r = 0)
|τr z | = τmax = ΠR2 an der Rohrwand.
So lange +ΠR2 < τy (d.h.Π< 2τy
R ): keine Verformung (d = 0) überall.
wegen der Haftrandbedingung an der Rohrwand: (rz (r = R) = 0),
es kommt v = 0 : keine Fluidbewegung.
So bald +ΠR2 > τy (weil R oder eherΠ)
Da |τr z | > τy an der Wand aber τ= 0 immer auf der Achse, dann existiert ein kritischer Radius
ry = r (τ= τy ) mitΠry
2 := τy ⇒ ry = 2τy
Π
Lösung:
• für 0 ≤ r ≤ ry : |τ| ≤ τy ⇒ d = 0
• für ry ≤ r ≤ R: |τ| ≥ τy :
da nur (τzr = τr z ) 6= 0 ⇒ τzr = τr z =−τy +2ηdr z (Bemerkung: τr z ≤ 0,τy ≥ 0,dr z ≤ 0)
also dr z = dzr = τy
2η + τzr2η = τy
2η − Πr4η
In dieser Strömung:
dr z = dzr = 12∂vz∂r = 1
2d vzdr
41
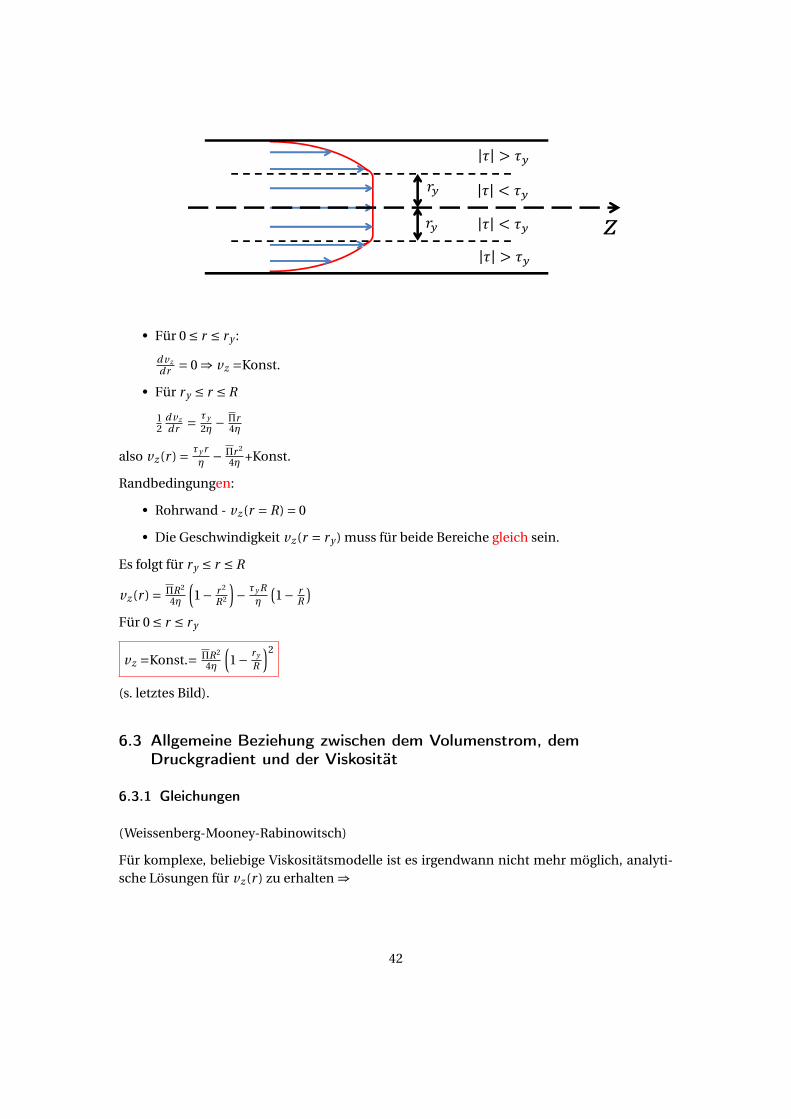
• Für 0 ≤ r ≤ ry :
d vzdr = 0 ⇒ vz =Konst.
• Für ry ≤ r ≤ R
12
d vzdr = τy
2η − Πr4η
also vz (r ) = τy rη − Πr 2
4η +Konst.
Randbedingungen:
• Rohrwand - vz (r = R) = 0
• Die Geschwindigkeit vz (r = ry ) muss für beide Bereiche gleich sein.
Es folgt für ry ≤ r ≤ R
vz (r ) = ΠR2
4η
(1− r 2
R2
)− τy R
η
(1− r
R
)Für 0 ≤ r ≤ ry
vz =Konst.= ΠR2
4η
(1− ry
R
)2
(s. letztes Bild).
6.3 Allgemeine Beziehung zwischen dem Volumenstrom, demDruckgradient und der Viskosität
6.3.1 Gleichungen
(Weissenberg-Mooney-Rabinowitsch)
Für komplexe, beliebige Viskositätsmodelle ist es irgendwann nicht mehr möglich, analyti-sche Lösungen für vz (r ) zu erhalten ⇒
42

1. numerische Strömungssimulation, CFD (s. später).
2. wir brauchen diese eigentlich nicht, wenn es nur darum geht, η zu bestimmen.
Welche Beziehungen brauchen wir dann?
• Volumenstrom q = 2πr=R∫r=0
r vz (r )dr (universell gültig)
• dass die Scherrate γ ausschließlich durch γ = −d vzdr gegeben ist (keine Zeitabhängig-
keit).
Für den Volumenstrom wird eine partielle Integration (integration by part) gemacht:
q2π =
R∫0
r vz dr =
* 0[
r 2
2 vz
]R
0−
R∫0
r 2
2d vzdr dr
q =πR∫
0
r 2γdr (6.7)
Mit einer erneuten partiellen Integration kommt also qπ =
[r 3
3 γ]R
0−
R∫0
r 3
3d γdr dr
q = π
3
R3γw −γ=γw∫γ=0
r 3d γ
(6.8)
wobei γW die Wandscherrate ist.
Wir wissen: τr z =−ΠR2
Πr
2= ηγ (6.9)
so dass
ηγW = ΠR
2(6.10)
Um das System komplett zu beschreiben, muss es umgeformt werden, auf Basis:
• der Wandschubspannung τW
• der charakteristischen Wandscherrate γn (n steht für newtonsche), die für ein newton-sches Fluid unter gleichen Messbedingungen (q , Π, R) herrscht.
43

Letzteres bekommen wir aus Gl. (6.6):
γn = qπR3
(3+ 1
n
), mit n = 1
γn = 4q
πR3 (6.11)
γn kann sofort nach Messung von q bestimmt werden! ,
Aus Gl. (6.7) (q =πR∫0
r 2γdr ) und (6.11):
γn = 4
R3
R∫0
r 2γdr (6.12)
Da τr z =−Πr2 , die Wandschubspannung:
τW =−ΠR
2(6.13)
τW kann also sofort nach der Messung des Druckgradientes Π bestimmt werden. ,
τr z =−Πr2 = τW
rR (linearer Zusammehang zw. r u. τr z )
Variablenänderung in Gl. (6.12): r → τ
Liefert letztendlich:
γn = 4
τ3w
τW∫0
τ2r z γdτr z (6.14)
Wen wir Gl. (6.14) gegenüber τW ableiten:
d γn
dτW=− 12
τ4W
τW∫0
τ2r z γdτr z + 4
τ3W
τ2W γW (6.15)
Vergleich zw. (6.14)↔(6.15):
d γn
dτW=−3 γn
τW+4 γW
τW
wir teilen durch γn
τW
d γndτWγnτW
=−3+4 γW
γn
44

Also
4γW
γn= 3+ d ln γn
d ln |τW |Wir definieren jetzt:
n′ := d ln |τW |d ln γn
(6.16)
es kommt:
4γW
γn= 3+ 1
n′
Dies ist letztendlich die Weissenberg-Mooney-Rabinowitsch-Gleichung:
γW = γn(3n′+1)
4n′ (6.17)
6.3.2 Messprinzip
R: Konstant und bekannt.
Gemessen wird
• q , der Volumenstrom
• Π, der Druckgradient
wobeiΠ (und dadurch auch q) üblicherweise variiert wird.
q liefert direkt γn aus (6.11)
Π liefert direkt τW aus (6.13)
Durch Änderungen wird im Experiment die Änderung von γn (oder eher ln γn) gegen τW
(eher ln |τW |) verfolgt.
Sobald n′ dadurch bestimmt wurde, wird γW auf Basis von (6.17) bestimmt.
Damit kann letztendlich
η := |τW |γW
(an der Wand) für verschiedene Werte der Beanspruchung ermittelt werden.
→ Grundlage der Kapillarviskosimetrie, sehr und immer mehr verbreitet.
Kein Ansatz über η hierfür notwendig! Es dürfen lediglich keine Zeiteffekte auftreten.
45

′
lnΠ
ln
6.4 Rotationsviskosimetrie
6.4.1 Einführung
• konzentrische Zylinder
• Kegel-Platte
• Platte-Platte
Im Interesse der Zeit:
• Couette-Strömung: bereits behandelt.
• Hier nicht diskutiert:
– rollende / fallende Kugel oder Nadel.
6.4.2 Rheometer mit konzentrischen Zylindern
Seit Couette (1890)
Ansätze:
• stationär (zeitunabhängig),
46

• laminar, isotherm
• Schwerkraft vernachlässigbar
• kein Einfluss der freien Oberfläche
Zylinderkoordinaten mit
vr = 0vz = 0vφ = vφ(r )
In Rotation: nur das innere Zylinder,
• Radius Ri ,
• benetzte Höhe L,
• RotationsgeschwindigkeitΩi .
Einzige Spannung, die im Tensor nicht null ist: (τrφ)i = Mi
2πR2i L
mit Mi das Drehmoment.
6.4.3 Scherung?
Für einen sehr engen Spalt, d.h. per Konvention: RiRo
Ê 0,99 (i: inner; o: outer)
γ= Konst. =Ωi
Ri +Ro2
Ro−Ri≈ Ωi
1− RiRo
⇒ η= (τrφ)i
γ ,
Für einen breiten Spalt:
RiRo
< 0,99
die Beziehung γi ≈ 2Ωi
n[
1− RiRo
] 2n
wird mit einer Reihenentwicklung erhalten, mit n := d ln Mid lnΩi
Die Größe ”n” wird über die Änderung vonΩi gemessen.
Dann n → γi → η= (τrφ)i
γi
Für ein newtonsches Fluid: n = 1.
6.4.4 Kegel-Platte
Dies ist in der Praxis die meist verwendete Lösung, siehe Bild 20.
Ansätze:
• stationär, laminar, isotherm
• Schwerkraft vernachlässigbar
47

Ω
Fluid
O R
Winkel
O
r
Abbildung 20: Messung mit Kegel-Platte-Konfiguration
• In der Praxis wird verwendet: β< 0,1 ↔ 6
• sphärische Fluidgrenze
Wir nutzen sphärische Koordinaten (r,θ,φ), mit dem Ansatz:
vr = 0vφ = 0vϑ = vϑ(r,φ)
⇒ v = vϑ(r,φ)eϑ
Randbedingung:
• v(φ= π
2
)= 0
• v(φ= π
2 −β)=Ωr (cosβ)eϑ (Festkörperrotation)
Im Spannungstensor (für ein allgemeines Fluid in sphärischen Koordinaten) ist τϑφ die ein-zige Komponente, die 6= 0 ist.
Da das System rotationssymmetrisch und auf sich geschlossen ist, gilt ∂∂ϑ = 0 . Dadurch ver-
48

einfacht sich die N-S-Gleichung auf:
−ρ v2ϑ
r =−∂p∂r
−ρ v2ϑ
cotφr =− 1
r∂p∂φ
0 =: 0− 1
r sinφ∂p∂ϑ + 1
r∂τφϑ∂φ + 2τφϑ cotφ
r
(6.18)
Die Randbedingung lädt gerade dazu ein, vϑ in linearer Abhängigkeit von r zu wählen:
v = vϑ = rω(φ)eϑ (6.19)
Dadurch:
• getrennte Abhängigkeit von r und ϑ
• vϑ ist proportionell zu r
Es folgt für den Deformationstensor:
d =
0 0 −ω+ω= 0
0 0 12
(−ωcotφ+ dω
dφ
)0 1
2
(−ωcotφ+ dω
dφ
)0
mit der Scherrate γ=−ωcotφ+ dω
dφ (Funktion nur von φ)
und τφϑ = τϑφ = ηγ (Funktion nur von φ).
In der dritten Gleichung von Gl. 6.18:
0 = ∂τφϑ∂φ +2τϑφ cotφ
= 1sin2φ
ddφ
[τφϑ sin2φ
] (6.20)
Daher:τφϑ = Konst.
sin2φ(6.21)
Durch Messung des Drehmomentes M auf der Kegeloberfläche:
τφϑ = 3M2πR3
0 sin2φ(6.22)
Jetzt: β sehr klein: β< 0,1 (6), daher φ≈ π2
Als Näherung erster Ordnung:
49

γ= Ωβ = Konst.
τ= τφϑ = 3M2πR3
o= Konst.
(6.23)
R
ΩRR
R0 und β sind bekannt,Ωwird festgelegt → γ= Ωβ ; M wird gemessen → τ= 3M
2πR30
⇒ η= τγ ,
Wenn das qualitative Fluidverhalten (z.B. scherverdünnend mit τy = 0) bekannt ist, kann eineKorrektur eingeführt werden, um β > 0 zu berücksichtigen. Für alle klassische Substanzenkann aber gezeigt werden, dass der Fehler im %-Bereich liegt, so lange β< 0,1 .
6.4.5 Platte-Platte Konfiguration
Siehe Bild 21.
Zylindrische Koordinaten (r,ϑ, z)
Konfiguration ähnlich zur Kegel-Platte Konfiguration
Nachteil: Die Strömung und daher die Beanspruchung ist weniger homogen. Wenn möglich,wird daher die Kegel-Platte-Konfiguration empfohlen.
Trotzdem einige Vorteile:
• Platte-Platte Konfiguration ist handlich für sehr hohe Viskosität (z.B. Gummi).
• Die Spalthöhe h (h ¿ R0) ist prinzipiell veränderlich (größere Flexibilität)
Ansätze:
• stationär, laminar, isotherm
• Schwerkraft vernachlässigbar
• zylindrische Fluidgrenze
Annahmen:
• vr = 0
• vz = 0
50

Ω
Fluid
O
2R
Höhe
O
r
Abbildung 21: Messung mit Platte-Platte-Konfiguration
• vϑ 6= 0, vϑ = vϑ(r, z)
• ∂∂ϑ = 0
Die Gleichungen lassen sich „einfach"für h ¿ R0 integrieren:
vϑ = Ωr zh
γ = rΩh
(6.24)
Es ergeben sich lineare Verhältnisse, wie für die klassische Couette-Strömung!
Für die Spannung:
τϑz = M2πR3
0
[3+ d ln M
d ln γR0
]M : Drehmoment (obere Platte)
γ= γ(r = R0) = ΩR0h
Für ein newtonsches Fluid: d ln Md ln γR0
= 1
dann τϑz = τn = 2MπR3
0
51
7 Viskoelastische Substanzen und Feder-Dämpfer-Modell
7.1 Idealviskoses Verhalten (Newtonsches Fluid)
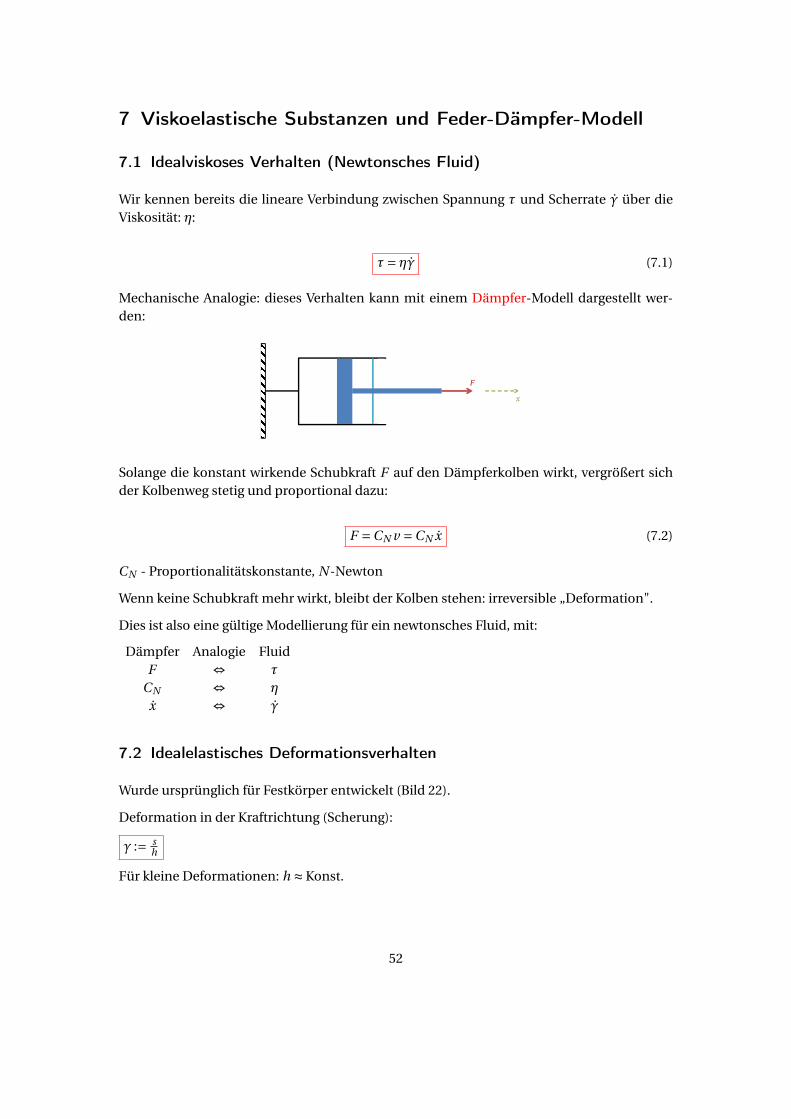
Wir kennen bereits die lineare Verbindung zwischen Spannung τ und Scherrate γ über dieViskosität: η:
τ= ηγ (7.1)
Mechanische Analogie: dieses Verhalten kann mit einem Dämpfer-Modell dargestellt wer-den:
Solange die konstant wirkende Schubkraft F auf den Dämpferkolben wirkt, vergrößert sichder Kolbenweg stetig und proportional dazu:
F =CN v =CN x (7.2)
CN - Proportionalitätskonstante, N -Newton
Wenn keine Schubkraft mehr wirkt, bleibt der Kolben stehen: irreversible „Deformation".
Dies ist also eine gültige Modellierung für ein newtonsches Fluid, mit:
Dämpfer Analogie FluidF ⇔ τ
CN ⇔ η
x ⇔ γ
7.2 Idealelastisches Deformationsverhalten
Wurde ursprünglich für Festkörper entwickelt (Bild 22).
Deformation in der Kraftrichtung (Scherung):
γ := sh
Für kleine Deformationen: h ≈ Konst.
52
Fläche
Abbildung 22: Deformation eines Festkörpers
Damit γ := sh
Für idealelastische Festkörper (vollkommen reversible Deformation) wird dann das Schub-modul G definiert:
G := τγ , mit τ := F
A
Dies führt zum Gesetz von Hooke τ=Gγ
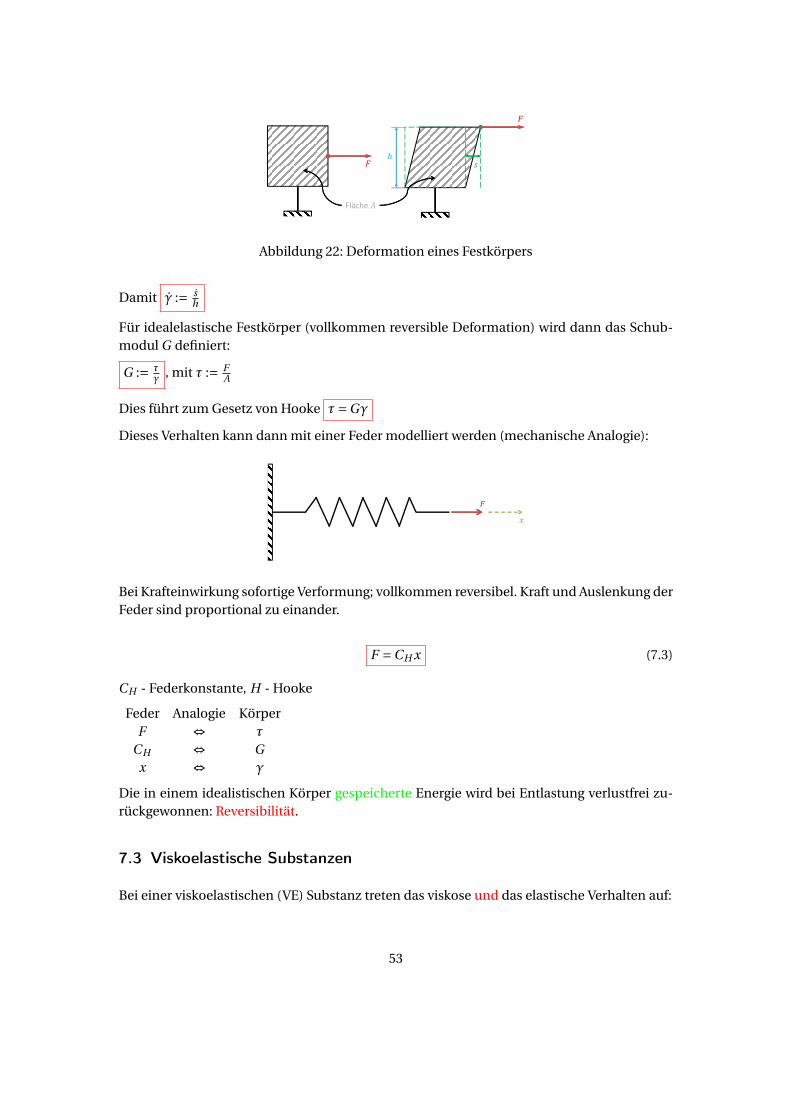
Dieses Verhalten kann dann mit einer Feder modelliert werden (mechanische Analogie):
Bei Krafteinwirkung sofortige Verformung; vollkommen reversibel. Kraft und Auslenkung derFeder sind proportional zu einander.
F =CH x (7.3)
CH - Federkonstante, H - Hooke
Feder Analogie KörperF ⇔ τ
CH ⇔ Gx ⇔ γ
Die in einem idealistischen Körper gespeicherte Energie wird bei Entlastung verlustfrei zu-rückgewonnen: Reversibilität.
7.3 Viskoelastische Substanzen
Bei einer viskoelastischen (VE) Substanz treten das viskose und das elastische Verhalten auf:
53
• Viskoser Anteil → Newton,
• Elastischer Anteil → Hooke (z.B. für eine Flüssigkeit unterhalb einer Fließgrenze τ <τy ).
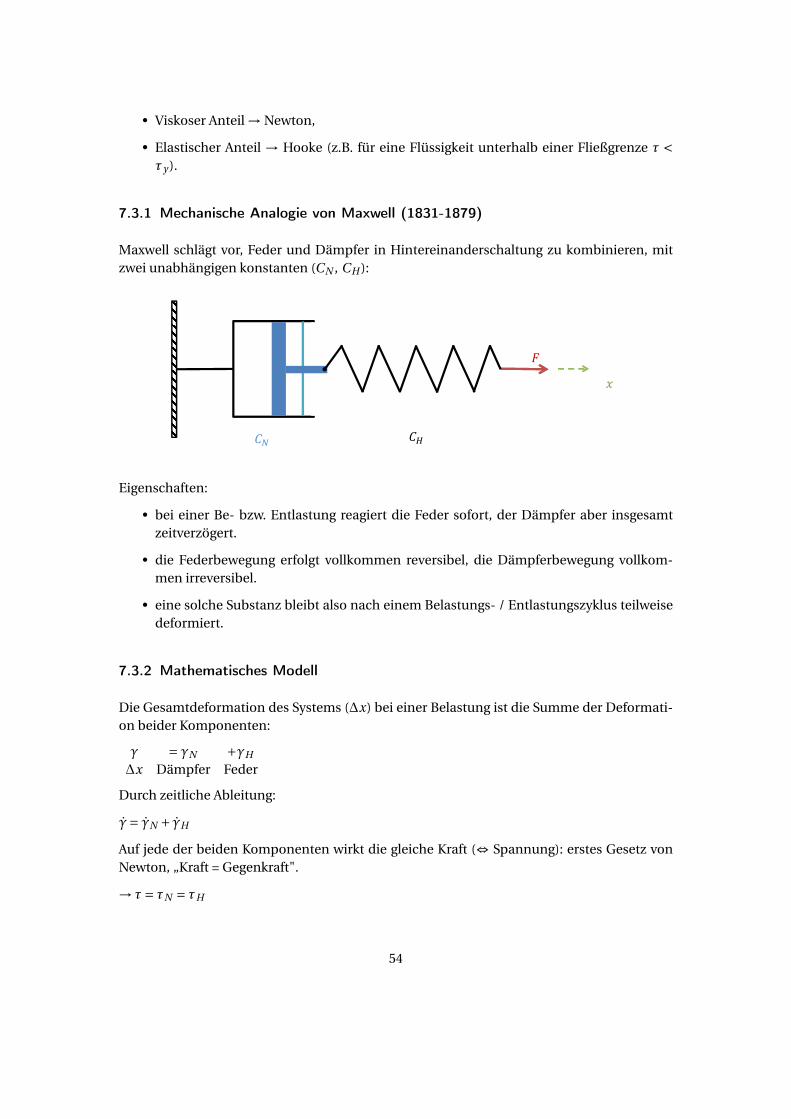
7.3.1 Mechanische Analogie von Maxwell (1831-1879)
Maxwell schlägt vor, Feder und Dämpfer in Hintereinanderschaltung zu kombinieren, mitzwei unabhängigen konstanten (CN , CH ):
Eigenschaften:
• bei einer Be- bzw. Entlastung reagiert die Feder sofort, der Dämpfer aber insgesamtzeitverzögert.
• die Federbewegung erfolgt vollkommen reversibel, die Dämpferbewegung vollkom-men irreversibel.
• eine solche Substanz bleibt also nach einem Belastungs- / Entlastungszyklus teilweisedeformiert.
7.3.2 Mathematisches Modell
Die Gesamtdeformation des Systems (∆x) bei einer Belastung ist die Summe der Deformati-on beider Komponenten:
γ = γN +γH
∆x Dämpfer Feder
Durch zeitliche Ableitung:
γ= γN + γH
Auf jede der beiden Komponenten wirkt die gleiche Kraft (⇔ Spannung): erstes Gesetz vonNewton, „Kraft = Gegenkraft".
→ τ= τN = τH
54

Für den Dämpfer gilt das Gesetz von Newton:
γN = τNη = τ
η
Für die Feder gilt das Gesetz von Hooke:
τ=Gγ
⇓ zeitliche Ableitung mit G=Konst.
τ=Gγ oder γH = τG
⇒ die Differentialgleichung nach Maxwell:
γ= γN + γH
liefert dann direkt:
γ= τη + τ
G (7.4)
Die Lösung dieser Gleichung erfolgt je nach Bedingungen analytisch oder numerisch (z.B.mit dem Programm Simulink).
8 Oszillationsrheometrie
8.1 Einleitung
Oszillationstests (Bild 23) sind insbesondere (aber nicht nur) für VE-Substanzen von großerBedeutung.
Bei fast allen Rheometertypen werden die Schwingungen vom Messkörper ausgeführt („Searle"-Methode).
Spalt
SchwingungFläche
Auslenkung
Abbildung 23: Prinzip der Oszillationsrheometrie
55
Die Oszillation der oberen Platte wird durch die Drehung des Rades angeregt. Bei voller Um-drehung überstreicht das Rad einen Drehwinkel von 360 = 2π. Dies entspricht der Dauereiner vollen Schwingungsperiode für γ(t ), τ(t ) und daher auch γ(t )
8.2 Verhalten von idealviskosen Substanzen (Newton)
Es gilt dann τ= ηγ. Bzw. hier: τ(t ) = ηγ(t )
mit η= τ(t )γ(t ) =Konst.
Während der Rotationsbewegung kann die Deformation (⇔ Scherung, da h=Konst.) als Si-nusfunktion dargestellt werden:
γ= γ(t ) = γA sin(ωt ) (8.1)
Scherung: γ= sh
γA : Amplitude der Scherung; [γ] = [γA] = 1
ω: Kreisfrequenz [ω] = rad/s
f : Frequenz [ f ] = 1/s = Hz
ω= 2π f (z.B. f = 10 Hz ↔ω≈ 63 rad/s)
In (8.1) sind vorerst γA undωKonstant. Später können beide ebenfalls zeitlich verändert wer-den.
Zeitliche Ableitung von (8.1):
γ= γAωcos(ωt ) (8.2)
τ= ηγ∝ cos(ωt ) (8.3)
Hier ist die τ-Kurve in Phase mit der γ-Kurve: synchrone Cosinuskurven. Also wird bei ideal-viskosen Substanzen (Fluiden) eine Verzögerung der τ-Kurve gegenüber der γ-Kurve beob-
achtet, mit einem konstanten Phasenverschiebungswinkel δ= π2 = 90 .
8.3 Verhalten von idealelastischen Substanzen (Hooke)
Es gilt dann τ=Gγ
Oder hier
56
τ(t ) =Gγ(t ) ∝ sin(ωt ) (8.4)
mit G = τ(t )γt = Konst.
(8.1) gilt weiter (γ= γA sin(ωt )). Also τ=GγA sin(ωt )
Hier ist die τ(t )-Kurve stets in Phase mit der γ(t )-Kurve: der Phasenwinkel ist δ= 0 .
8.4 Verhalten von VE-Substanzen
Viskoelastische Substanzen bestehen aus einem viskosen und einem elastischen Anteil.
Es ist dann logisch, die Spannung τ als Überlagerung eines Sinus- und eines Cosinus-Anteilsdarzustellen:
τ= τ(t ) =G ′γA sin(ωt )+G ′′γA cos(ωt ) (8.5)
für γ= γA sin(ωt ).
G ′ wird Speichermodul (storage modulus) genannt.
G ′′ wird Verlustmodul (loss modulus) genannt.
[G ′] = [G ′′] = Pa
Grenzfall idealelastisch: (s. 8.4)
τ∝ γ∝ sin(ωt )
⇒ G ′′ = 0
Daher beschreibt G ′ das elastische Verhalten der Messprobe.
Grenzfall idealviskos: (s. 8.3)
τ∝ γ∝ cos(ωt )
⇒ G ′ = 0
Daher beschreibt G ′′ das viskose Verhalten der Messprobe.
Fazit:
57
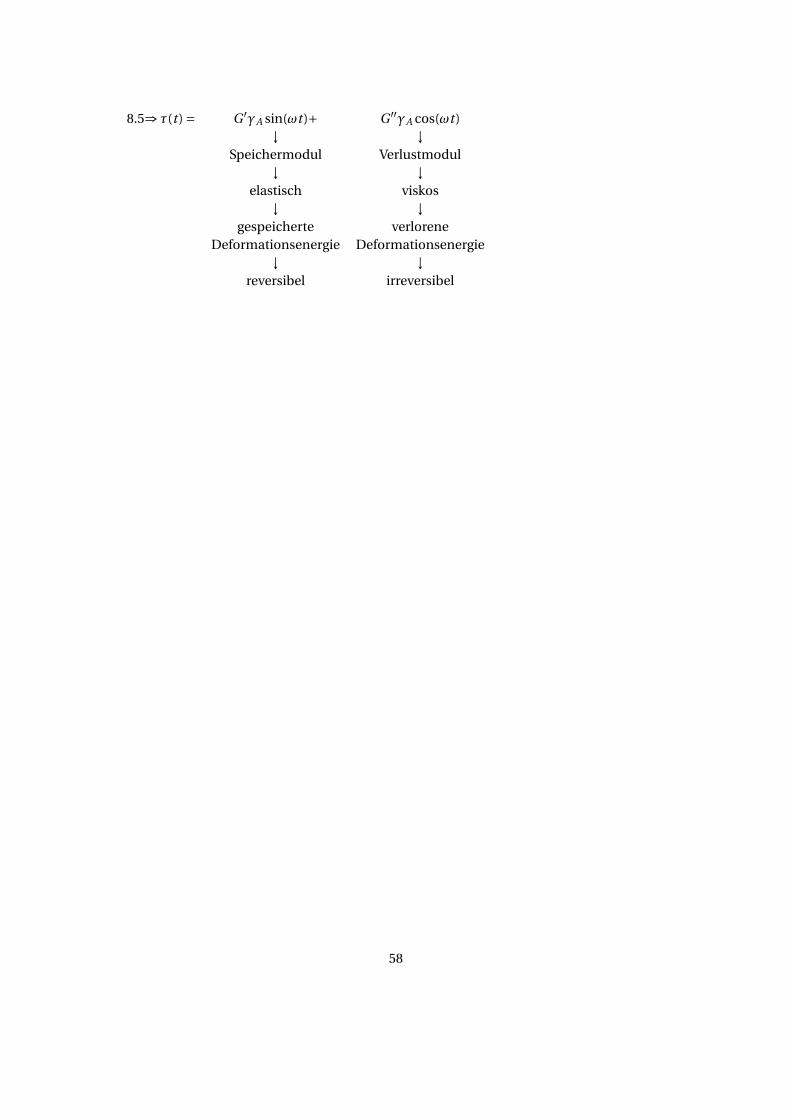
8.5⇒ τ(t ) = G ′γA sin(ωt )+ G ′′γA cos(ωt )↓ ↓
Speichermodul Verlustmodul↓ ↓
elastisch viskos↓ ↓
gespeicherte verloreneDeformationsenergie Deformationsenergie
↓ ↓reversibel irreversibel
58





![Rheologie diaporama 2013 cor [Mode de compatibilité] · RHEOLOGIE Description des déformations et des écoulements de la matière VISQUEUX VISCO ELASTIQUE ELASTIQUE Loi de Newton](https://img.pdfslide.net/doc/110x75/5b9e417309d3f2d7748c2e88/rheologie-diaporama-2013-cor-mode-de-compatibilite-rheologie-description.jpg)























