Embed Size (px)
Citation preview

Instructors Solution for Assignment 3 Chapter 3: Time Domain Analysis of LTIC Systems
Problem 3.2
(i) y (t )+ 4 y (t )+8 y (t ) = x (t )+ x (t ) with x (t ) = e −4tu (t ), y (0) = 0, and y (0) = 0.
(a) Zero-input response of the system: The characteristic equation of the LTIC system (i) is
0842 =++ ss ,
which has roots at s = −2 ± j2. The zero-input response is given by
)2sin()2cos()( 22 tBetAety ttzi
−− +=
for t ≥ 0, with A and B being constants. To calculate their values, we substitute the initial conditions 0)0( =−y and 0)0( =−y in the above equation. The resulting simultaneous equations are
0220
=+−=
BAA
that has the solution, A = 0 and B = 0. The zero-input response is therefore given by
.0)( =tyzi
Because of the zero initial conditions, the zero-input response is also zero.
(b) Zero-state response of the system: To calculate the zero-state response of the system, the initial conditions are assumed to be zero. Hence, the zero state response yzs(t) can be calculated by solving the differential equation
)(842
2tx
dtdx
dtdy
dtyd
+=++
with initial conditions, 0)0( =−y and 0)0( =−y , and input x(t) = exp(−4t)u(t). The homogenous solution of system (i) has the same form as the zero-input response and is given by
)2sin()2cos()( 22
21
)( teCteCty tthzs
−− +=
for t ≥ 0, with C1 and C2 being constants. The particular solution for input x(t) = exp(−4t)u(t) is of the form
)(4)( tu Ke(t) y tpzs
−= .
Substituting the particular solution in the differential equation for system (i) and solving the resulting equation gives K = −3/8. The zero-state response of the system is, therefore, given by
( ) )()2sin()2cos()( 4832
22
1 tueteCteCty tttzs
−−− −+= .

2 Solution to Assignment 3
To compute the values of constants C1 and C2, we use the initial conditions, y(0−) = 0 and 0)0( =−y assumed for the zero-state response. Substituting the initial conditions in yzs(t) leads to the following simultaneous equations
0220
23
21
83
1
=++−
=−
CCC
with solution C1 = 3/8 and C2 = −3/8. The zero-state solution is given by
( ) )()2sin()2cos()( 42283 tuetetety ttt
zs−−− −−= .
(c) Overall response of the system: The overall response of the system is obtained by summing up the zero-input and zero-state responses, and is given by
( ) )()2sin()2cos()( 42283 tuetetety ttt −−− −−= .
(d) Steady state response of the system: The steady state response of the system is obtained by applying the limit, t → ∞, to y(t) and is given by
( ) 0)()2sin()2cos(lim)( 42283 =−−= −−−
∞→tuetetety ttt
t.
(iii) y (t )+ 2 y (t )+ y (t ) = x (t ) with x (t ) = cos(t )+ sin(2t )!" #$u (t ), y (0) = 3, and y (0) =1.
(a) Zero-input response of the system: The characteristic equation of the LTIC system (iii) is
0122 =++ ss ,
which has roots at s = −1, −1. The zero-input response is given by tt
zi BteAety −− +=)(
for t ≥ 0, with A and B being constants. To calculate their values, we substitute the initial conditions 3)0( =−y and 1)0( =−y in the above equation. The resulting simultaneous equations are
13
=+−=
BAA
that has a solution, A = 3 and B = 4. The zero-input response is therefore given by
( ) )(43)( tuteety ttzi
−− += .
(b) Zero-state response of the system: To calculate the zero-state response of the system, the initial conditions are assumed to be zero. Hence, the zero state response yzs(t) can be calculated by solving the differential equation
)(122
2tx
dtdy
dtyd =++
with initial conditions, 0)0( =−y and 0)0( =−y , and input x(t) = [cos(t) + sin(t)]u(t). The homogenous solution of system (iii) has the same form as the zero-input response and is given by
tthzs teCeCty −− += 21)( )(

Solutions 3
for t ≥ 0, with C1 and C2 being constants. The particular solution for input x(t) = [cos(t) + sin(t)]u(t) is of the form
)2sin()2cos()sin()cos( 4321)( tKtKtKt K(t) y p
zs +++= .
Substituting the particular solution in the differential equation for system (iii) and solving the resulting equation gives
( ) () ( ) )2sin(4)cos()2sin()2cos()sin()cos(1)2cos(2
)2sin(2)cos()sin(2)2sin(4)2cos(4)sin()cos(43214
3214321tttKtKtKtKtK
tKtKtK tKtKtKtK−−=+++++
−+−+−−−−
Collecting the coefficients of the cosine and sine terms, we get
( ) ( )( ) ( ) 0)2sin(444)2cos(44
)sin(2)cos(12434343
212121=++−−+++−
++−−++++−tKKK tKKK
tKKK tKKK
which gives K1 = 0, K2 = −0.5, K3 = 0.64, and K4 = 0.48. The zero-state response of the system is
( ) )()2sin(48.0)2cos(64.0)sin(5.0)( 21 tutttteCeCty ttzs ++−+= −− .
To compute the values of constants C1 and C2, we use the initial conditions, y(0−) = 0 and 0)0( =−y . Substituting the initial conditions in yzs(t) leads to the following simultaneous equations
048.05.0064.0
211
=+−+−=+
CCC
with solution C1 = −0.64 and C2 = −1.1. The zero-state solution is given by
( ) )()2sin(48.0)2cos(64.0)sin(5.01.164.0)( tutttteety ttzs ++−−−= −− .
(c) Overall response of the system: The overall response of the system is obtained by summing up the zero-input and zero-state responses, and is given by
or, ( ) ( ) )()2sin(48.0)2cos(64.0)sin(5.01.164.0)(43)( tutttteetuteety tttt ++−−−++= −−−−
or, ( ) )()2sin(48.0)2cos(64.0)sin(5.09.236.2)( tutttteety tt ++−+= −−.
(d) Steady state response of the system: The steady state response of the system is obtained by applying the limit, t → ∞, to y(t) and is given by
( ) )()2sin(48.0)2cos(64.0)sin(5.09.236.2lim)( tutttteety ttt
++−+= −−
∞→
or, ( ) )()2sin(48.0)2cos(64.0)sin(5.0)( tutttty ++−= .
(v) .1)0(,0)0()0()0(),(2)()()(2 2
2
4
4
======++ yandyyytutxwithtxtydtyd
dtyd
(a) Zero-input response of the system: The characteristic equation of the LTIC system (v) is
0124 =++ ss ,
which has roots at s = ±j1, ±j1. The zero-input response is given by
jtjtjtjtzi DteCeBteAety −− +++=)( ,

4 Solution to Assignment 3
for t ≥ 0, with A and B being constants. To calculate their values, we substitute the initial conditions in the above equation. The resulting simultaneous equations are
03302210
=−+−−=−−+−=+−+=+
DjCBjADjCBjA
DjCBjACA
that has a solution, A = −j0.75 Β = −0.25, C = j0.75 and D = −0.25. The zero-input response is
( ) )(25.075.025.075.0)( tuteejteejty jtjtjtjtzi
−− −+−−= ,
which reduces to
( ) )(cos5.0sin5.1)( tuttttyzi −= .
(b) Zero-state response of the system: To calculate the zero-state response of the system, the initial conditions are assumed to be zero. Hence, the zero state response yzs(t) can be calculated by solving the differential equation
)()(2 2
2
4
4
txtydtyd
dtyd =++
with all initial conditions set to 0 and input x(t) = 2u(t). The homogenous solution of system (v) has the same form as its zero-input response and is given by
jtjtjtjthzs teCeCteCeCty −− +++= 4321)( )(
where Ci’s are constants. The particular solution for input x(t) = 2 u(t) is of the form
)()( t Ku(t) y pzs = .
Substituting the particular solution in the differential equation for system (v) and solving the resulting equation gives
2)0(20 =++ K , or, K = 2.
The zero-state response of the system is given by
2)( 4321 ++++= −− jtjtjtjtzs teCeCteCeCty ,
for (t ≥ 0). To compute the values of constants Ci’s, we use zero initial conditions. Substituting the initial conditions in yzs(t) leads to the following simultaneous equations
03302202
=−+−−=−−+−=+−+
−=+
DjCBjADjCBjA
DjCBjACA
with solution C1 = −1, C2 = j0.5, C3 = −1, and C4 = −j0.5. The zero-state solution is given by
( ) )(5.05.0)( tutejetejety jtjtjtjtzs
−− −−+−= ,
which reduces to
( ) )(sincos2)( tuttttyzi −−= .
(c) Overall response of the system: The overall response of the system is obtained by summing up the zero-input and zero-state responses, and is given by

Solutions 5
or, ( ) ( ) )(sincos2)(cos5.0sin5.1)( tuttttutttty −−+−=
or, ( ) )(2cos5.0sincos2sin5.1)( tuttttttty +−−−= .
(d) Steady state response of the system: The steady state response of the system is obtained by applying the limit, t → ∞, to y(t) and is given by
( ) ∞→+−−−=∞→
)(2cos5.0sincos2sin5.1lim)( tutttttttyt
. ▌
Problem 3.5
(i) The output y(t) is given by
∫∫∞∞
∞−
ττ−=ττ−τ=∗=0
)()()()()()( dtudtuutututy .
Recall that ⎩⎨⎧
>τ≤τ=τ− ).(if0)(if1)( tttu
Therefore, the output y(t) is given by
).()()0(if0)0(if)( trttut
ttty ==⎩⎨⎧
<≥=
The aforementioned convolution can also be computed graphically.
(iii) The output y(t) is given by
[ ] [ ])1()1()2()1(2)()( −−+∗−+−−= tutututututy
Using the properties of the convolution integral, the output is expressed as
[ ] [ ] [ ][ ] [ ] [ ])1()2()1()2()1()1(2
)1()1(2)1()()1()()(−∗−−+∗−+−∗−+
+∗−−−∗−+∗=tutututututu
tututututututy
Based on the results of part (i), i.e., u(t) * u(t) = r(t), the overall output is given by
)3()1()2(2)(2)1()1()( −−−+−+−−−+= trtrtrtrtrtrty .
(vi) Considering the two cases (t < 0) and (t ≥ 0) separately
Case I (t < 0): ∫∫∫∞
τ−τ−τ−τ
∞−
τ−−τ τ+τ+τ=0
)(520
)(52)(52)( deedeedeety t
t
tt
t
which reduces to ∫∫∫∞
τ−−τ−
∞−
τ− τ+τ+τ=0
750
3575)( deedeedeety t
t
tt
t
or, ( ) tttttttt eeeeeeeety 8315
2142
71
7153
3157
715 1)( −−−−− +−=×+−×+×=
Case II (t ≥ 0): ∫∫∫∞
τ−τ−τ−−τ−
∞−
τ−−τ τ+τ+τ=t
tt
tt deedeedeety )(52
0
)(520
)(52)(

6 Solution to Assignment 3
which reduces to ∫∫∫∞
τ−−τ−
∞−
τ− τ+τ+τ=t
tttt deedeedeety 75
0
35075)(
or, ( ) ttttttttt eeeeeeeeety 12715
312
315
717
7153
3155
71 1)( −−−−−− +−+=×+−×+= .
Hence, the overall expression for y(t) is given by
⎪⎩
⎪⎨⎧
≥
<== − ).0(
)0()( 3
51
251
tete
ty t
t
Problem 3.6
(iii) Using the graphical approach, the convolution of x(t) with w(t) is shown in Fig. S3.6.3, where we consider six different cases for different values of t.
Case I (t < −1): Since there is no overlap, 0)(3 =ty .
Case II (−1 ≤ t < 0): .)1.(1)( 21
22)1(
13
22
++==ττ+= +
−∫ tdty ttt
Case III (0 ≤ t < 1):
( ) ( ) .0
)1.(1)1.(1)1).(1()(
21
23
21
2)1(
221
2
0
0
1
1
13
2222++−=⎟
⎠⎞⎜
⎝⎛ −−−+−−=
ττ−+ττ++ττ+−=
−−
−
−∫∫∫
t
dddty
tttt
t
t
t
τ
1
−1
w(τ)
0 1−1
τ
1
−1
w(τ)
0 1−1 0 1−1
τ
1
−1
1 20
x(τ)
τ
1
−1
1 20
x(τ)1
−1
1 20 1 20
x(τ)
τt −2 t −1 t
x(t−τ)1
−1
τt −2 t −1 tt −2 t −1 t
x(t−τ)1
−1
(a) Waveform for z(τ) (b) Waveform for x(τ) (c) Waveform for x(t−τ)
τt −2 t −1 t
w(τ) x(t−τ)1
−1
0 1−1
τt −2 t −1 tt −2 t −1 t
w(τ) x(t−τ)1
−1
0 1−1 0 1−1
τt −2 t −1 t
w(τ) x(t−τ)1
−1
0 1−1
τt −2 t −1 tt −2 t −1 t
w(τ) x(t−τ)1
−1
0 1−1 0 1−1
τt −2 t −1 t
w(τ) x(t−τ)1
−1
0 1−1
τt −2 t −1 tt −2 t −1 t
w(τ) x(t−τ)1
−1
0 1−1 0 1−1
(d) Overlap btw w(τ) and x(t−τ) for (t<−1)
(e) Overlap btw w(τ) and x(t−τ) for (−1≤t<0) (f) Overlap btw w(τ) and x(t−τ) for (0≤t<1)
τt −2 t −1 t
w(τ) x(t−τ)1
−1
1−1
τt −2 t −1 tt −2 t −1 t
w(τ) x(t−τ)1
−1
1−1 1−1
τt −2 t −1 t
w(τ) x(t−τ)1
−1
1−1
τt −2 t −1 tt −2 t −1 t
w(τ) x(t−τ)1
−1
1−1 1−1
τt −2 t −1 t
w(τ) x(t−τ)1
−1
1−1
τt −2 t −1 tt −2 t −1 t
w(τ) x(t−τ)1
−1
1−1 1−1
(g) Overlap btw w(τ) and x(t−τ) for (1≤t<2)
(h) Overlap btw w(τ) and x(t−τ) for (2≤t<3) (i) Overlap btw w(τ) and x(t−τ) for (t>3)

Solutions 7
0 1 2 3 4-2
-1.5
-1
-0.5
0
0.5
1
y1(t)
= x
(t)*x
(t)
Problem 3.6(i)
(i)-1 0 1 2 3
-0.5
0
0.5
1
y2(t)
= x
(t)*z
(t)
Problem 3.6(ii)
(ii)-1 0 1 2 3
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
y3(t)
= x
(t)*w
(t)
Problem 3.6(iii)
(iii)
-1 0 1 2 3-0.5
0
0.5
y4(t)
= v
(t)*v
(t)
Problem 3.6(iv)
(iv)-2 -1 0 1 2
-0.6
-0.4
-0.2
0
0.2
y5(t)
= z
(t)*z
(t)
Problem 3.6(v)
(v)-2 -1 0 1 2
-0.3
-0.2
-0.1
0
0.1
0.2
0.3y6
(t) =
w(t)
*z(t)
Problem 3.6(vi)
(vi)
-2 -1 0 1 2
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
y7(t)
= v
(t)*z
(t)
Problem 3.6(vii)
(vii)-2 -1 0 1 2
0
0.1
0.2
0.3
0.4
0.5
0.6
y8(t)
= w
(t)*w
(t)
Problem 3.6(viii)
(viii)-2 -1 0 1 2
0
0.1
0.2
0.3
0.4
0.5
y9(t)
= w
(t)*w
(t)
Problem 3.6(ix)
(ix)
(j) Convolution output 3( )y t
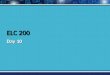
Fig. S3.6.3: Convolution of x(t) with w(t) in Problem 3.6(iii).
Case IV (1 ≤ t < 2):
.50
)1.(1)1).(1()1).(1()(
27
23
2)2(
21
2)2(
2)1(
21
1
1
1
0
0
23
2222
+−=⎟⎠⎞⎜
⎝⎛ −−⎟
⎠⎞⎜
⎝⎛ −+⎟
⎠⎞⎜
⎝⎛ −−=
ττ−+ττ−−+ττ+−=
−−−−
−
−∫∫∫
t
dddty
ttttt
t
t
Case V (2 ≤ t < 3): 29
22)3(
1
23 30)1).(1()(
22
−+−=−=ττ−−= −
−∫ tdty tt
t
.
Case VI (t > 4): Since there is no overlap, )(3 ty = 0.
Combining all the cases, the result of the convolution )()()(3 twtxty ∗= is given by
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
<≤−+
<≤+−
<≤++−
<≤−++
=
elsewhere.0)32(3)21(5)10()01(
)(
29
2
27
23
21
23
21
2
32
2
2
2
tttttttt
tyt
t
t
t
The output is y3(t) plotted in Fig. S3.6.3(j).
(vii) Using the graphical approach, the convolution of v(t) with z(t) is shown in Fig. 3.6.7, where we consider six different cases for different values of t.
τ
1
−1
v(τ)
0 1−1
e−2τe2τ
τ
1
−1
v(τ)
0 1−1 1−1
e−2τe2τ
τ
1
−1
z(τ)
0 1−1
τ
1
−1
z(τ)
0 1−1
τ
1
−1
z(t−τ)
t t+1t−1 0 1−1
τ
1
−1
z(t−τ)
t t+1t−1 0 1−1
(a) Waveform for v(τ) (b) Waveform for z(τ) (c) Waveform for z(t−τ)

8 Solution to Assignment 3
τ
1
−1
v(τ) z(t−τ)
t t+1t−1 0 1−1
τ
1
−1
v(τ) z(t−τ)
t t+1t−1 0 1−1 1−1
τ
1
−1
v(τ) z(t−τ)
t t+1t−1 0 1−1
τ
1
−1
v(τ) z(t−τ)
t t+1t−1 t t+1t−1 0 1−1 1−1
τ
1
−1
v(τ) z(t−τ)
t t+1t−1 1−1
τ
1
−1
v(τ) z(t−τ)
t t+1t−1 t t+1t−1 1−1 1−1
(d) Overlap btw v(τ) and z(t−τ) for (t<−2) (e) Overlap btw v(τ) and z(t−τ) for (−2≤t<−1) (f) Overlap btw v(τ) and z(t−τ) for (−1≤t<0)
τ
1
−1
v(τ) z(t−τ)
t t+1t−1 0 1−1
τ
1
−1
v(τ) z(t−τ)
t t+1t−1 t t+1t−1 0 1−1 1−1
τ
1
−1
v(τ) z(t−τ)
t t+1t−10 1−1
τ
1
−1
v(τ) z(t−τ)
t t+1t−1 t t+1t−10 1−1 1−1
τ
1
−1
v(τ) z(t−τ)
t t+1t−11−1
τ
1
−1
v(τ) z(t−τ)
t t+1t−1 t t+1t−11−1 1−1
(g) Overlap btw v(τ) and z(t−τ) for (0≤t<1) (h) Overlap btw v(τ) and z(t−τ) for (1≤t<2) (i) Overlap btw v(τ) and z(t−τ) for (t>2)
0 1 2 3 4-2
-1.5
-1
-0.5
0
0.5
1
y1(t
) =
x(t
)*x(
t)
Problem 3.6(i)
(i)-1 0 1 2 3
-0.5
0
0.5
1
y2(t
) =
x(t
)*z(
t)
Problem 3.6(ii)
(ii)-1 0 1 2 3
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
y3(t
) =
x(t
)*w
(t)
Problem 3.6(iii)
(iii)
-1 0 1 2 3-0.5
0
0.5
y4(t
) =
v(t
)*v(
t)
Problem 3.6(iv)
(iv)-2 -1 0 1 2
-0.6
-0.4
-0.2
0
0.2
y5(t
) =
z(t
)*z(
t)
Problem 3.6(v)
(v)-2 -1 0 1 2
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
y6(t
) =
w(t
)*z(
t)
Problem 3.6(vi)
(vi)
-2 -1 0 1 2
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
y7(t
) =
v(t
)*z(
t)
Problem 3.6(vii)
(vii)-2 -1 0 1 2
0
0.1
0.2
0.3
0.4
0.5
0.6
y8(t
) =
w(t
)*w
(t)
Problem 3.6(viii)
(viii)-2 -1 0 1 2
0
0.1
0.2
0.3
0.4
0.5
y9(t
) =
w(t
)*w
(t)
Problem 3.6(ix)
(ix)
(j) Convolution output 7 ( )y t
Fig. S3.6.7: Convolution of v(t) with z(t) in Problem 3.6(vii).
Case I (t < −2): Since there is no overlap, 0)(7 =ty .
Case II (−2 ≤ t < −1):
[ ]
[ ] [ ]
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−−−=
++−+−=
+τ−=ττ−=
−−+
−−++
+
−ττ
+
−
τ∫
.
)1(
)()()(
2432
21)1(2
41
2412
21)1(2
41)1(2
21
1
12
412
21
1
1
27
etee
eetee
eetdtety
t
tt
tt

Solutions 9
Case III (−1 < t < 0): [ ] [ ][ ] [ ]
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
+−−=
−+−+−−++=
+τ−−++τ−=
ττ−+ττ−=
−−+−
+−−−
+τ−τ−−
ττ
+τ−
−
τ ∫∫
.
)()(
)()()(
2432
21)1(2
43
41
21)1(2
412
432
21
41
21
1
02
412
210
12
412
21
1
0
20
1
27
tetee
teetet
eeteet
dtedtety
t
t
t
t
Case IV (0 < t < 1): [ ] [ ][ ] [ ]
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
++−−=
−++−+−+=
+τ−−++τ−=
ττ−+ττ−=
−−−
−−−
τ−τ−−
ττ
τ−
−
τ ∫∫
.
)()(
)()()(
2432
21)1(2
43
41
212
432
21)1(2
43
41
21
1
02
412
210
12
412
21
1
0
20
1
27
tetee
teteet
eeteet
dtedtety
t
t
t
t
Case V (1 ≤ t < 2):
[ ]
[ ] [ ]
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
+−=
++−+−=
+τ−−=ττ−=
−−−−
−−++
−τ−τ−
−
τ−∫
.
)1(
)()()(
2432
21)1(2
41
2412
21)1(2
41)1(2
21
1
12
412
21
1
1
27
etee
eetee
eetdtety
t
tt
tt
Case VI (t > 2): Since there is no overlap, 0)(7 =ty .
Combining all the cases, the result of the convolution )()()(7 tvtzty ∗= is given by
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
<≤+−
<≤++−−
<≤−+−−
−<≤−−−−
=−−−−
−−−
−−+−
−−+
elsewhere.0)21()10()01()12(
)(2
432
21)1(2
41
2432
21)1(2
43
2432
21)1(2
43
2432
21)1(2
41
7
teteetteteetteteetetee
tyt
t
t
t
The output is y7(t) shown in Fig. S3.6.7(j) at the end of the solution of this problem.
(ix) Using the graphical approach, the convolution of v(t) with w(t) is shown in Fig. 3.6.9, where we consider six different cases for different values of t.

10 Solution to Assignment 3
τ
1
−1
v(τ)
0 1−1
e−2τe2τ
τ
1
−1
v(τ)
0 1−1 1−1
e−2τe2τ
τ
1
−1
w(τ)
0 1−1
τ
1
−1
w(τ)
0 1−1 0 1−1
τ
1
−1
w(t−τ)
0 1−1t t+1t−1τ
1
−1
w(t−τ)
0 1−1t t+1t−1 t t+1t−1
(a) Waveform for v(τ) (b) Waveform for w(τ) (c) Waveform for w(t−τ)
τ
1
−1
v(τ) w(t−τ)
t t+1t−1 1−1
τ
1
−1
v(τ) w(t−τ)
t t+1t−1 t t+1t−1 1−1 1−1
t t+1t−1τ
1
−1
v(τ) w(t−τ)
0 11−1t t+1t−1 t t+1t−1τ
1
−1
v(τ) w(t−τ)
0 11−1 1−1
t t+1t−1τ
1
−1
v(τ) w(t−τ)
0 1−1 t t+1t−1 t t+1t−1τ
1
−1
v(τ) w(t−τ)
0 1−1 1−1
(d) Overlap btw v(τ) and w(t−τ) for (t<−2) (e) Overlap btw v(τ) and w(t−τ) for (−2≤t<−1) (f) Overlap btw v(τ) and w(t−τ) for (−1≤t<0)
t t+1t−1τ
1
−1
v(τ) w(t−τ)
0 1−1 t t+1t−1 t t+1t−1τ
1
−1
v(τ) w(t−τ)
0 1−1 1−1
t t+1t−1τ
1
−1
v(τ) w(t−τ)
0 1−1 t t+1t−1 t t+1t−1τ
1
−1
v(τ) w(t−τ)
0 1−1 1−1
τ
1
−1
v(τ) w(t−τ)
t t+1t−11−1
τ
1
−1
v(τ) w(t−τ)
t t+1t−11−1 1−1
(g) Overlap btw v(τ) and w(t−τ) for (0≤t<1) (h) Overlap btw v(τ) and w(t−τ) for (1≤t<2) (i) Overlap btw v(τ) and w(t−τ) for (t>2)
0 1 2 3 4-2
-1.5
-1
-0.5
0
0.5
1
y1(t
) =
x(t
)*x(
t)
Problem 3.6(i)
(i)-1 0 1 2 3
-0.5
0
0.5
1
y2(t
) =
x(t
)*z(
t)
Problem 3.6(ii)
(ii)-1 0 1 2 3
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
y3(t
) =
x(t
)*w
(t)
Problem 3.6(iii)
(iii)
-1 0 1 2 3-0.5
0
0.5
y4(t
) =
v(t
)*v(
t)
Problem 3.6(iv)
(iv)-2 -1 0 1 2
-0.6
-0.4
-0.2
0
0.2
y5(t
) =
z(t
)*z(
t)
Problem 3.6(v)
(v)-2 -1 0 1 2
-0.3
-0.2
-0.1
0
0.1
0.2
0.3y6
(t)
= w
(t)*
z(t)
Problem 3.6(vi)
(vi)
-2 -1 0 1 2
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
y7(t
) =
v(t
)*z(
t)
Problem 3.6(vii)
(vii)-2 -1 0 1 2
0
0.1
0.2
0.3
0.4
0.5
0.6
y8(t
) =
w(t
)*w
(t)
Problem 3.6(viii)
(viii)-2 -1 0 1 2
0
0.1
0.2
0.3
0.4
0.5
y9(t
) =
w(t
)*w
(t)
Problem 3.6(ix)
(ix)
(j) Convolution output 9 ( )y t
Fig. S3.6.9: Convolution of v(t) with w(t) in Problem 3.6(ix).
Since w(t) = 1 − |t|, therefore, the expression for w(t – τ) is
⎩⎨⎧
>τ−τ−<ττ−−=τ−−=τ− . if)(1
if)(11)( ttttttw
Case I (t < −2): Since there is no overlap, 0)(9 =ty .

Solutions 11
Case II (−2 ≤ t < −1): ( ) ( )
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−−=
++−+−−+=
ττ−τ+=τ+τ−=
−−+
−−++−+
+
−
τ+
−
τ+
−
τ ∫∫∫
.
)1()1(
)1()1()(
2452
21)1(2
41
2412
21)1(2
41)1(2
212)1(2
21
1
1
21
1
21
1
29
etee
eeeeteet
dedetdtety
t
ttt
ttt
Case III (−1 < t < 0):
[ ] [ ] [ ] [ ]
[ ] [ ]
⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪
⎨
⎧
++++−=
−τ−−−++
−τ−++−τ+−=
ττ−++ττ−++ττ+−=
−−+−
+τ−τ−+τ−
τττ−
ττ−
τ
+τ−τ
−
τ ∫∫∫
.1
)1(
)1()1(
)1()1()1()(
2412
212
21)1(2
41
1
02
412
211
02
21
02412
2102
21
12
412
21
12
21
1
0
202
1
29
teteee
eeet
eeeteeet
dtedtedtety
tt
tt
tt
tt
t
t
t
.
Case IV (0 < t < 1):
[ ] [ ] [ ] [ ]
[ ] [ ]
⎪⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪⎪
⎨
⎧
+−+−−=
−τ−−−++
−τ+−+−τ+−=
ττ−++ττ+−+ττ+−=
−−−−
τ−τ−τ−
τττ−
ττ−
τ
τ−τ
−
τ ∫∫∫
.1
)1(
)1()1(
)1()1()1()(
2412
212
21)1(2
41
12412
2112
21
0
02
412
210
02
210
12
412
210
12
21
12
0
20
1
29
teteee
eeet
eeeteeet
dtedtedtety
tt
tt
tt
t
t
t
Case V (1 ≤ t < 2): ( ) ( )
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⎨
⎧
−+=
+−+−−+−−−=
ττ+τ−=ττ+−=
−−−−
−−−−−−−−−
−
τ−
−
τ−
−
τ− ∫∫∫
.
)1()1(
)1()1()(
2452
21)1(2
41
)1(241)1(2
212
412
21)1(22
21
1
1
21
1
21
1
29
etee
eeteeeet
dedetdtety
t
ttt
ttt
.
Case VI (t > 2): Since there is no overlap, 0)(9 =ty .
Combining all the cases, the result of the convolution )()()(9 twtvty ∗= is given by

12 Solution to Assignment 3
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
<≤−+
<≤+−+−−
<≤−++++−
−<≤−−−
=−−−−
−−−−
−−+−
−−+
elsewhere.0)21()10(1)01(1)12(
)(2
452
21)1(2
41
2412
212
21)1(2
41
2412
212
21)1(2
41
2452
21)1(2
41
9
teteetteteeetteteeetetee
tyt
tt
tt
t
The output is y9(t) shown in Fig. S3.6.9(j).
Problem 3.12
(iii) System h3(t) is NOT memoryless since h3(t) ≠ 0 for t ≠ 0. System h3(t) is causal since h3(t) = 0 for t < 0. System h3(t) is BIBO stable since
5 5 5
0 0 1
5 51 1 15 5 50
0
| 3( ) | sin(2 ) ( ) sin(2 ) sin(2 )
0 ( )
t t t
t t
h t dt e t u t dt e t dt e t dt
e dt e
π π π∞ ∞ ∞ ∞
− − −
−∞ −∞ ≤
∞∞− −
= = =
⎡ ⎤≤ = − = − − = < ∞⎡ ⎤⎣ ⎦⎣ ⎦
∫ ∫ ∫ ∫
∫
14 2 43.
(vii) System h7(t) is NOT memoryless since h7(t) ≠ 0 for t ≠ 0. System h7(t) is causal since h7(t) = 0 for t < 0. System h7(t) is NOT BIBO stable since
∞==∫ ∫∞
∞−
∞
0
)5cos(|)(7| dttdtth .
Consider the bounded input signal cos(5 )t . If this signal is applied to the system, the output can be calculated as:
0
( ) ( ) ( ) cos(5 5 )cos(5 ) ( ) cos(5 5 )cos(5 )y t x t h d t u d t dτ τ τ τ τ τ τ τ τ τ∞ ∞ ∞
−∞ −∞
= − = − = −∫ ∫ ∫ .
The output at t=0 is given by,
( )
{
2 12
0 0 0
1 12 2
0 0=
(0) cos( 5 )cos(5 ) cos (5 ) 1 cos(10 )
cos(10 )
finite value
y d d d
d d
τ τ τ τ τ τ τ
τ τ τ
∞ ∞ ∞
∞ ∞
∞ =
= − = = +
= + = ∞
∫ ∫ ∫
∫ ∫1 44 2 4 43
It is observed that the output becomes unbounded at t=0 even if the input is always bounded. This proves that the system is not BIBO stable.
(viii) System h8(t) is NOT memoryless since h8(t) ≠ 0 for t ≠ 0. System h8(t) is NOT causal since h8(t) ≠ 0 for t < 0. System h8(t) is BIBO stable since

Solutions 13
[ ]
ln(0.95) ln(0.95)
00 0
2| 8( ) | 0.95 2 0.95 2ln(0.95)
2 2 0 1 39ln(0.95) ln(0.95)
t t t th t dt dt dt e dt e∞ ∞ ∞ ∞
∞
−∞ −∞
⎡ ⎤= = = = ⎣ ⎦
= − = − = < ∞
∫ ∫ ∫ ∫

14 Solution to Assignment 3
Solutions to Problems of Chapter 6 Laplace Transform
Problem 6.1
(b) By definition
∫ ∫∫∫∫∫∞
∞−
∞+−
∞−
−∞
−−
∞−
−−−∞
∞−
− +=+===
II
ts
I
tssttsttsttst dtedtedteedteedteedtetxsX0
)3(0
)3(
0
30
33)()( .
Integral I reduces to
[ ]00 (3 )
(3 )1
1 11 0 Re{(3 )} 0 :Re{ } 3(3 ) (3 ) 3
s ts t eI e dt provided s ROC R s
s s s
−−
−∞ −∞
−= = = − = − > ⇒ <
− − −∫
while integral II reduces to
[ ]( 3)
( 3)1
0 0
1 10 1 Re{( 3)} 0 :Re{ } 3( 3) ( 3) 3
s ts t eII e dt provided s ROC R s
s s s
∞∞ − +− + −
= = = − = + > ⇒ > −− + + +∫
The Laplace transform is therefore given by
1 22
1 1 6( ) : : ( 3 Re{ } 3)3 3 9
X s I II with ROC R R R or R ss s s
−= + = − = = − < <
+ − −I .
(e) By definition
∫ ∫∫∞
∞−
∞−−−
∞
∞−
− ===0
)7(7 )9cos()()9cos()()( dttedtetutedtetxsX tssttst .
The above expression reduces to
[ ] ∞−−−−∞
−− +−−+−
== ∫ 0)7()7(
220
)7( )9sin(9)9cos()7(9)7(
1)9cos()( tetess
dttesX tststs
or,
[ ] .7}Re{0)}7Re{(provided9)7()7()0)7(()00(
9)7(1)( 2222 >⇒>−
+−
−=+−−−+
+−= ss
sss
ssX
(f) We derive the Laplace transform for two cases: (s = 0) and (s ≠ 0).
Case I: (s = 0). By definition
1
120 0
0
( ) ( ) 2 (1 ) 2 0.5 1sX s x t dt t dt t t∞
=−∞
⎡ ⎤= = − = − =⎣ ⎦∫ ∫

Solutions 15
Case II: (s ≠ 0). By definition
0 1
01 0
( ) ( ) (1 ) (1 )st st sts
I II
X s x t e dt t e dt t e dt∞
− − −
≠−∞ −
= = + + −∫ ∫ ∫1 44 2 4 43 1 44 2 4 43
.
Integral I is given by
( ) ( )
2
2 2 2
0 0 00 0
1 11 1
1 1 1
1 1 1 1
(1 ) ( 1)
1 1 ( 1) 1 ( 1) 1
st st st st sts s
s s s s ss s s s
I t e dt e dt te dt e e st
e e s se s e s e s
− − − − −−
− −− − −
⎡ ⎤ ⎡ ⎤= + = + = + − −⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎡ ⎤= − + − − − = − − − − = − −⎣ ⎦ ⎣ ⎦
∫ ∫ ∫
while Integral II is given by
( ) ( )
2
2 2 2
1 1 11 1
1 10 0
0 0 0
1 1 1 1
(1 ) ( 1)
1 ( 1) 1 ( 1) 1 1
st st st st sts s
s s s s ss s s s
II t e dt e dt te dt e e st
e e s s se e s e s
− − − − −−
− − − − −
⎡ ⎤ ⎡ ⎤= − = − = − − −⎣ ⎦ ⎣ ⎦
⎡ ⎤ ⎡ ⎤= − − − − + = − + + − = + −⎣ ⎦ ⎣ ⎦
∫ ∫ ∫
The Laplace transform is therefore given by
( )21
1 0( ) : Entire s-plane
2 0s ss
sX s ROC
e e s−
=⎧⎪= ⎨
+ − ≠⎪⎩
Note that the (s = 0) case can also be derived from the other result by applying the limit, s → 0, and the L’Hopital’s rule
Problem 6.3
(b) Using partial fraction expansion and associating the ROC to individual terms, gives
X (s ) = s 2+2s+1(s+1)(s 2+5s+6)
= s+1(s+2)(s+3) =
As+2
ROC:Re{s}<−2
+ Bs+3
ROC:Re{s}<−3
where constants A, and B were computed in part (a) as A = −1, and B = 2.
Taking the inverse transform of X(s), gives
( ) )(2)( 32 tueetx tt −−= −−
Note that the same rational fraction for X(s) gives different time domain representations if the associated ROC is changed.
(d) X (s ) = s 2+3s−4(s+1)(s 2+5s+6)
= s 2+3s−4(s+1)(s+2)(s+3) =
As+1
ROC:Re{s}<−1 + B
s+2
ROC:Re{s}<−2 + C
s+3
ROC:Re{s}<−3
where constants A, B, and C were computed in part (c) as A = −3, B = 6, and C = −2.
Taking the inverse transform of X(s), gives
( )2 3( ) 3 6 2 ( )t t tx t e e e u t− − −= − + − .
(f) Using partial fraction expansion and associating the ROC to individual terms, gives

16 Solution to Assignment 3
4}Re{
)4(
3}Re{
)3(
2}Re{
)2(2}Re{
)2()4)(3()2(1
22)(−>
+
−>
+
−>
+
−>
+++++ +++==
s
sD
s
sC
s
sB
s
sA
sssssX
where
[ ] [ ]
[ ] [ ]
[ ] [ ] .43)4(and
2)3(
21)2(
4)3()2(1
4)4)(3()2(1
3)4()2(1
1)4)(3()2(1
2)4)(3(1
1
2)4)(3()2(
1
22
22
2
==+=
−==+=
−==+=
−=+++
−=++++
−=+++
−=++++
−=+++
−=++++
ssss
sssss
ssss
sssss
ssss
sssss
sD
sC
sB
To evaluate A, expand X(s) as
)3()2()4()2()4)(3()4)(3)(2(1 22 ++++++++++++=+ ssDssCssBsssAs
and compare the coefficients of s3. We get
DCA ++=0
which has a solution A = 5/4. The Laplace transform may be expressed as
4}Re{
)4(43
3}Re{
)3(2
2}Re{
)2(21
2}Re{
)2(45
2)(
−>
+
−>
+
−>
+
−>
+ +−−=
s
s
s
s
s
ss
ssX
Taking the inverse transform of X(s), gives
).()(2)()()( 44332
212
45 tuetuetutetuetx tttt −−−− +−−=
(g) Using partial fraction expansion and associating the ROC to individual terms, gives
0}:Re{ROC
)16()(
1}:Re{ROC
)1(
1}:Re{ROC
)1(1}:Re{ROC
)1()16()1(12
23223
2)(
<
+
+
−<
+
−<
+
−<
++++− +++==
s
sEDs
s
sC
s
sB
s
sA
sssssX
where
[ ] [ ] .174)1(
2)16(12
1
3)16()1(
122
2
23
2==+=
−=++−
−=+++−
ssss
sssss sC
To evaluate A, B, and C expand X(s) as
322222 )1)(()16()16)(1()16()1(12 ++++++++++=+− sEDssCssBssAss
and compare the coefficients of s4, s3 , s2, and s. We get
) of nts(coefficie316322) of nts(coefficie33171) of nts(coefficie320) of nts(coefficie0
2
3
4
sEDBAsEDCBAsEDBAsDA
+++=−++++=
+++=+=
, or,
EDBAEDBA
EDBADA
3163223317
3200
1713
+++=−+++=+++=
+=
.
which has a solution of A = 0.0206, B = −0.2076, D = −0.0206, and E = 0.2282.
Taking the inverse transform of X(s), gives

Solutions 17
).()4sin(057.0)()4cos(0206.0)(1176.0)(2076.0)(0206.0)( 2 tuttuttuettutetuetx ttt −−−+−−−+−−= −−−
Problem 6.13
(a) Calculating the Laplace transform of both sides, we get
s 2Y (s )− s y (0− )=0 − y (0− )
=0
"
#$$
%
&''+3 sY (s )− y (0− )
=0
"
#$$
%
&''+ 2Y (s ) =1
which reduces to 1)()23( 2 =++ sYss
or, 21 1 1 1
( 1)( 2) 1 2( 3 2)( ) s s s ss sY s + + + ++ +
= = = − .
Calculating the inverse Laplace transform, we get
).()()( 2 tuetuety tt −− −=
(e) Calculating the Laplace transform of both sides, we get
s4Y (s )− s 3 y (0− )− s 2 y (0− )− sy (0− )− y (0− )=0
"
#$$
%
&''+ 2 s 2Y (s )− sy (0− )− y (0− )
=0
"
#$$
%
&''+Y (s ) = 1
s,
which reduces to ssYss 124 )()12( =++ ,
or, 22224 )1()1()12(1)(
++
++
++++==
sEDs
sCBs
sA
ssssY ,
where [ ] [ ] .10)12(
10)12(
12424 ===
=++=++ ssssssssA
Equating numerator of Y(s) on both sides and setting A = 1, we get
2 2 2
4 3 2
1 ( 1) ( ) ( 1) ( )(1 ) (2 ) ( ) 1s Bs C s s Ds E sB s Cs B D s C E s
= + + + + + +
= + + + + + + + +
Comparing the coefficients of polynomials of different order we get
4
3
2
Coefficients of : 1 0 1Coefficients of : 0Coefficients of : 2 0 1 0 1Coefficients of : 0 0
s B Bs Cs B D D Ds C E E
+ = ⇒ = −
=
+ + = ⇒ + = ⇒ = −
+ = ⇒ =
The partial fraction expansion of Y(s) is given by
2 2 21
1 ( 1)( ) s s
s s sY s
+ += − − .
The inverse transform is therefore given by
[ ]( ) 1 cos( ) 0.5 sin( ) ( )y t t t t u t= − +
where we have used the following transform pair

18 Solution to Assignment 3
( )
022 2
0
20sin( ) ( ) sL
st t u t ω
ωω
+←⎯→
which is proved in Problem 6.10(b).
Problem 6.14
Solution:
(a) The Laplace transform of the input and output signals are given by
)2(2
2114
2
2
2)( and )(+++
+ =+==ssss
sss sYsX .
Dividing Y(s) with X(s), the transfer function is given by
)2(42
)()( 2
)( +++== ssss
sXsYsH .
The impulse response is obtained by taking the partial fraction expansion of H(s) as follows
)2(21
41
41
)2(422
)( ++++ −+≡= sssssssH .
Taking the inverse Laplace transform, the impulse response is given by
).()()()( 221
41
41 tuetutth t−−+δ=
In order to calculate the input-output relationship in the form of a differential equation, we represent the transfer function as
)()(
)2(422
)( sXsY
sssssH == +++ .
Cross multiplying, we get )()2()()2(4 2 sXsssYss ++=+
which can be represented as )(2)()()(8)(4 22 sXssXsXsssYsYs ++=+ .
Taking the inverse Laplace transform and assuming zero initial conditions, the differential equation representing the system is given by
)(284 2
2
2
2tx
dtdx
dtxd
dtdy
dtyd
++=+ .
(c) The Laplace transform of the input and output signals are given by
)4(121 3)( and )( 32 +−== sss
sYsX .
Dividing Y(s) with X(s), the transfer function is given by
)4(32
)()( 2
)( +−== ss
ssXsYsH .
The impulse response is obtained by taking the inverse Laplace transform. The impulse response is given by
[ ] .)(3)(2)( 42
2tuetuth t
dtd −−=
In order to calculate the input-output relationship in the form of a differential equation, we represent the transfer function as

Solutions 19
)()(
)4(3)4(2 3
)( sXsY
sssssH == +
−+ .
Cross multiplying, we get )(8)(2)(3)(4)( 32 sXssXsXsssYsYs ++−=+ .
Taking the inverse Laplace transform, the input-output relationship of the system is given by
)(8234 3
3
2
2tx
dtdx
dtxd
dtdy
dtyd
++−=+ .
(e) Note that there is no overlap between the ROC’s of the two terms exp(t)u(−t) and exp(−3t)u(t), therefore, the Laplace transform for y(t) does not exist.
Problem 6.15
(a) 22
2
)1())((
121)(
+
−+
+++ ==
sjsjs
ssssH
Two zeros at s = j, −j.
Two poles at s = 1, −1.
Because both poles are in the left hand side of the s-plane, the system is always BIBO stable.
(c) )6)(3()3/10(
189103 3)( 2 ++
+
+++ == ss
sssssH
One zero at s = −10/3.
Two poles at s = −3, −6.
Because both poles are in the left side of the s-plane, the system is always BIBO stable.
(e) sssssssH 12323
23
2)( ==
++++
The system does not have any zero.
One pole at s = 0.
There is only one pole, which is located on the imaginary axis. Therefore, the system is a marginally stable system.