Embed Size (px)
DESCRIPTION
Instrumentacion de Termoresistencias
Citation preview
AI
AutomatizaciónIndustrial
apuntes capítulo V
Facultad de Ingeniería - UNCPBADto. de Ingeniería Electromecánica
Prof: Dr. Gerardo Acosta

AI Automatización Industrial
• OBJETIVOS DEL CAPÍTULO V
–– Conceptos GeneralesConceptos Generales– Fuentes de error en sensores– Medición de Temperatura – Medición de Fuerza– Medición de Presión

AI Sistemas de Instrumentación
ESTRUCTURA BÁSICA
SENSOR TRANSMISOR
COMPARADORVISUALIZADORREGISTRADOR
........
MAGNITUDA MEDIR
TRANSDUCTOR
AC.DE
SEÑAL
LÍNEA DE TRANSMISIÓNDE DATOS
AI TRANSDUCTORES - Características generales
CARÁCTERÍSTICAS DE LA MAGNITUD A MEDIR
üRANGO: tiene relación con los límites superior e inferior de losvalores de la magnitud a medirü unidireccional (0kg a 100kg)ü bidireccional (-10ºC a 10ºC / -10ºC a 50ºC)ü desplazado (70mm a 150mm)
üSOBRERANGO: valor máximo de la magnitud a medir que aplicadoal transductor no afecta el normal funcionamiento del mismo.

AI TRANSDUCTORES - Características generales
CARÁCTERÍSTICAS ELÉCTRICAS
TRANSDUCTORMAGNITUD
A MEDIR
ALIMENTACIÓN
SALIDA
ALIMENTACIÓN / SALIDA
ü DE LA ALIMENTACIÓN2 y 4 hilos
ü DEL TIPO DE SALIDAtensión ó corriente
AI TRANSDUCTORES - Características generales
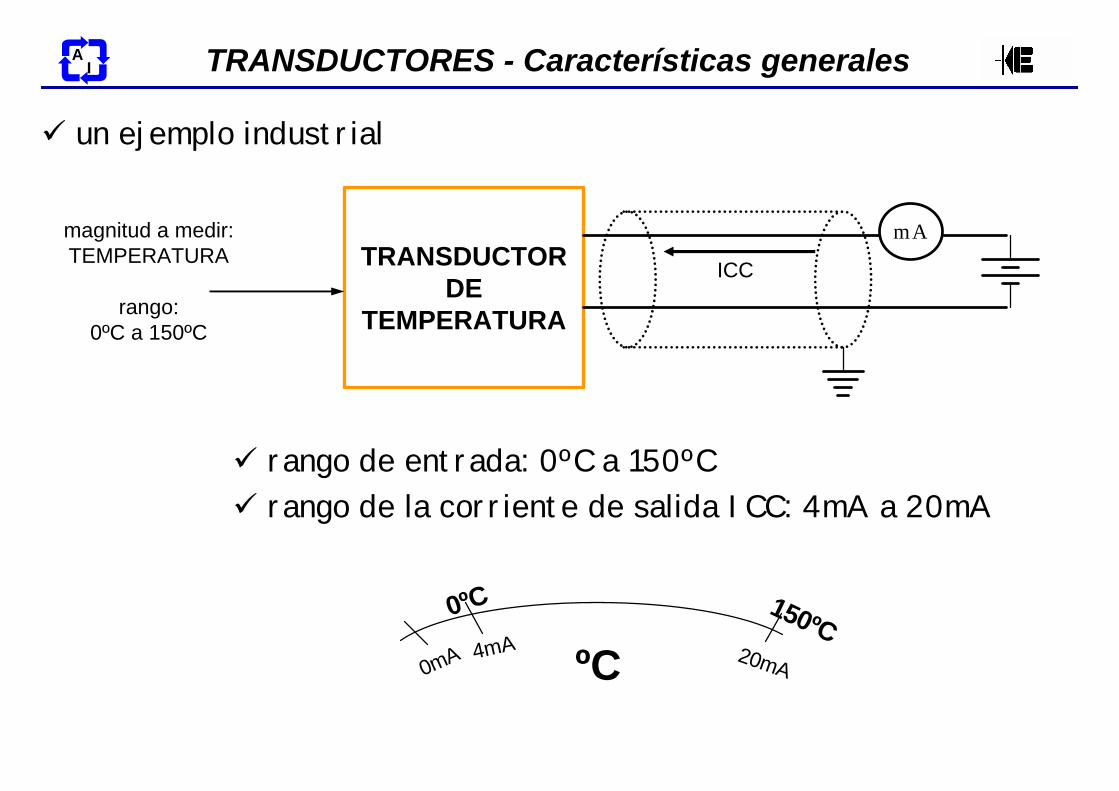
ü un ejemplo industrial
TRANSDUCTORDE
TEMPERATURA
magnitud a medir:TEMPERATURA
rango:0ºC a 150ºC
ICC
mA
ü rango de entrada: 0ºC a 150ºCü rango de la corriente de salida ICC: 4mA a 20mA
0mA 4mA 20mA
0ºC 150ºC
ºC
AI TRANSDUCTORES - Características generales
Ø RESOLUCIÓN: es la magnitud de los cambios en escalón de lasalida cuando la entrada varía continuamente dentro del rango.Se expresa en % SFE.
Ø UMBRAL: es el cambio más pequeño en la magnitud a medir,necesario para producir un cambio en la salida del transductor.Se expresa en términos de la magnitud de entrada.
Ø SENSIBILIDAD: relación en el cambio de la salida respecto delcambio en la magnitud a medir.

AI TRANSDUCTORES - Características generales
CARÁCTERÍSTICAS DINÁMICAS
ü RESPUESTA EN FRECUENCIA
Ø especificación: rango de frecuencias de entrada para el cual el transductor posee una respuesta “plana”, usualmente dentro de los ± 3dB.

AI TRANSDUCTORES - Características generales
ü TIEMPOS DE RESPUESTA
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
-3 -2 -1 0 1 2 3 4 5 6 7 8 9 10
tiempo
salid
a
tiempo derespuesta90%
tiempo desubida
constante de tiempo

AI TRANSDUCTORES - Influencia externa
• CARACTERÍSTICAS DEL MEDIO AMBIENTE
– EFECTOS DE LA TEMPERATURA– EFECTOS DE LA PRESIÓN– EFECTOS DE LA HUMEDAD– EFECTOS DE LA VIBRACIÓN
• CARÁCTERÍSTICAS DE FIABILIDAD
– VIDA ÚTIL DE OPERACIÓN Y ALMACENAMIENTO
– SOBRECARGAS

AI Automatización Industrial
• OBJETIVOS DEL CAPÍTULO V
– Conceptos Generales–– Fuentes de error en sensoresFuentes de error en sensores– Medición de Temperatura – Medición de Fuerza– Medición de Presión– Medición de Caudal
AI TRANSDUCTORES - Fuentes de error
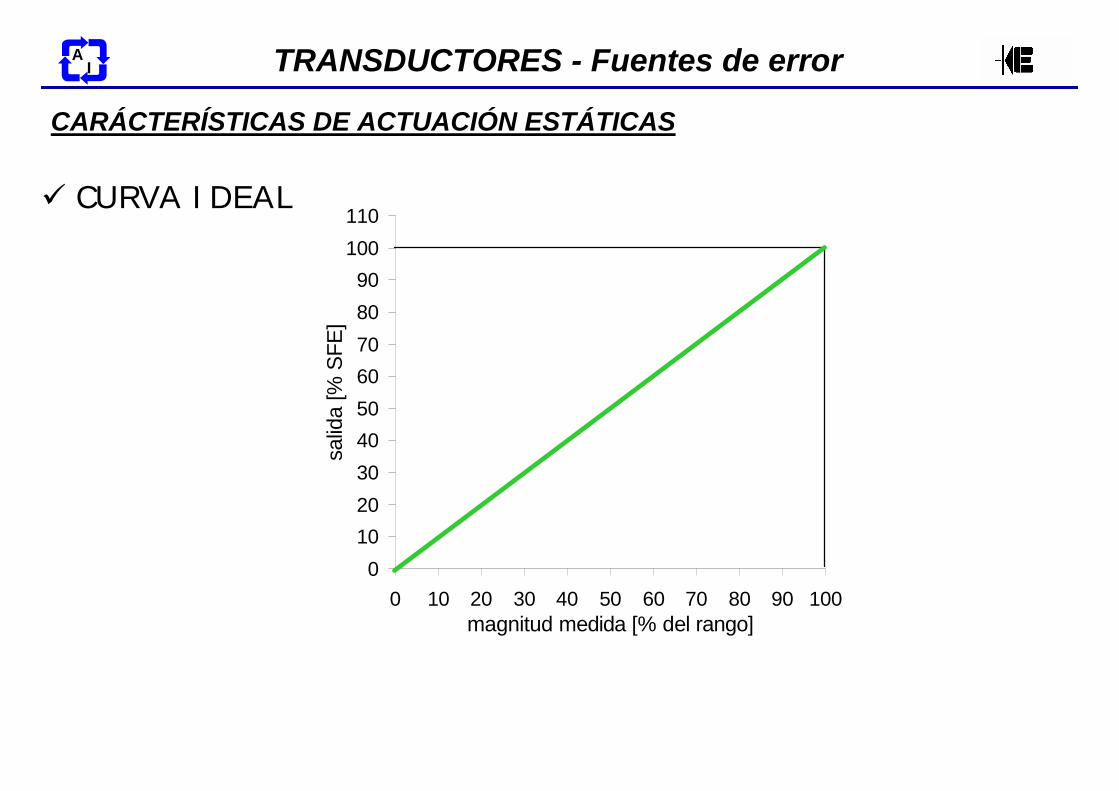
CARÁCTERÍSTICAS DE ACTUACIÓN ESTÁTICAS
ü CURVA IDEAL
0
10
20
30
40
50
60
70
80
90
100
110
0 10 20 30 40 50 60 70 80 90 100magnitud medida [% del rango]
salid
a [%
SFE
]
AI TRANSDUCTORES - Fuentes de error
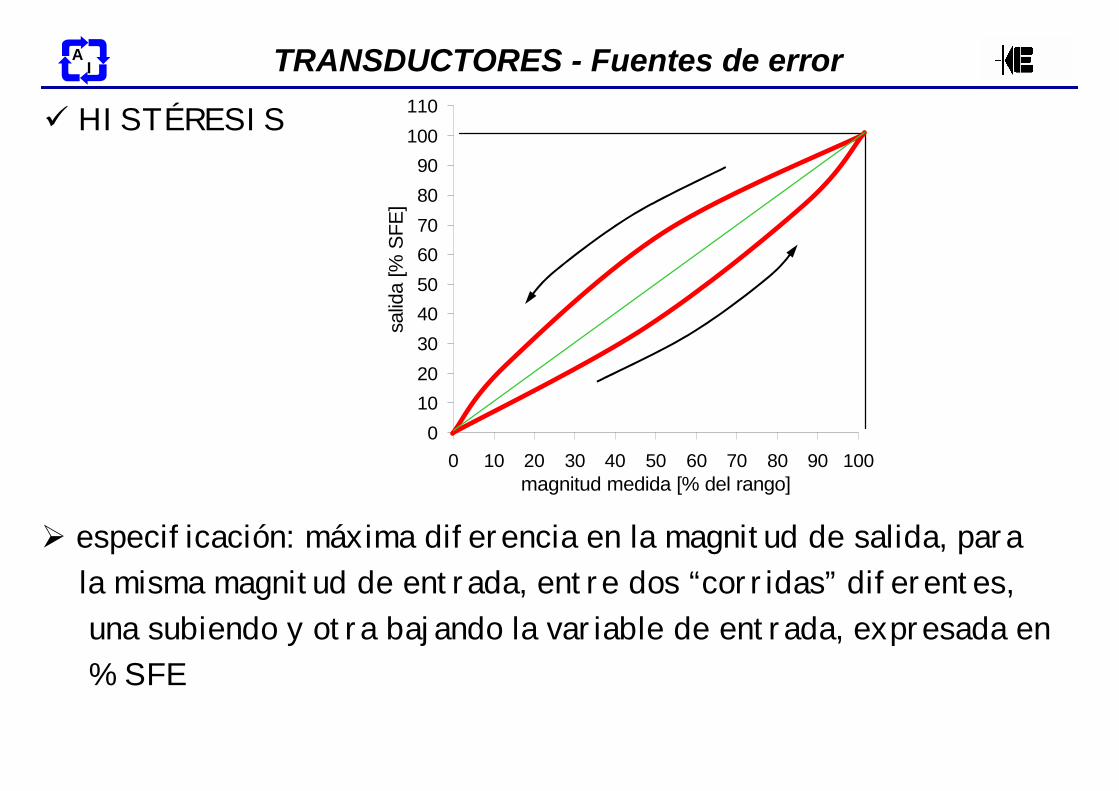
ü HISTÉRESIS
Ø especificación: máxima diferencia en la magnitud de salida, parala misma magnitud de entrada, entre dos “corridas” diferentes,una subiendo y otra bajando la variable de entrada, expresada en% SFE
0
10
20
30
40
50
60
70
80
90
100
110
0 10 20 30 40 50 60 70 80 90 100magnitud medida [% del rango]
salid
a [%
SFE
]

AI TRANSDUCTORES - Fuentes de error
ü REPETIBILIDAD
Ø especificación: máxima diferencia entre dos ciclos de calibraciónexpresada en ±% SFE
0
10
20
30
40
50
60
70
80
90
100
110
0 10 20 30 40 50 60 70 80 90 100magnitud medida [% del rango]
salid
a [%
SFE
]

AI TRANSDUCTORES - Fuentes de error
0
10
20
30
40
50
60
70
80
90
100
110
0 10 20 30 40 50 60 70 80 90 100magnitud medida [% del rango]
salid
a [%
SFE
]
ü LINEALIDAD TERMINAL
Ø especificación: máxima desviación de cualquier punto decalibración respecto de la curva ideal, expresada en ±% SFE
AI TRANSDUCTORES - Fuentes de error
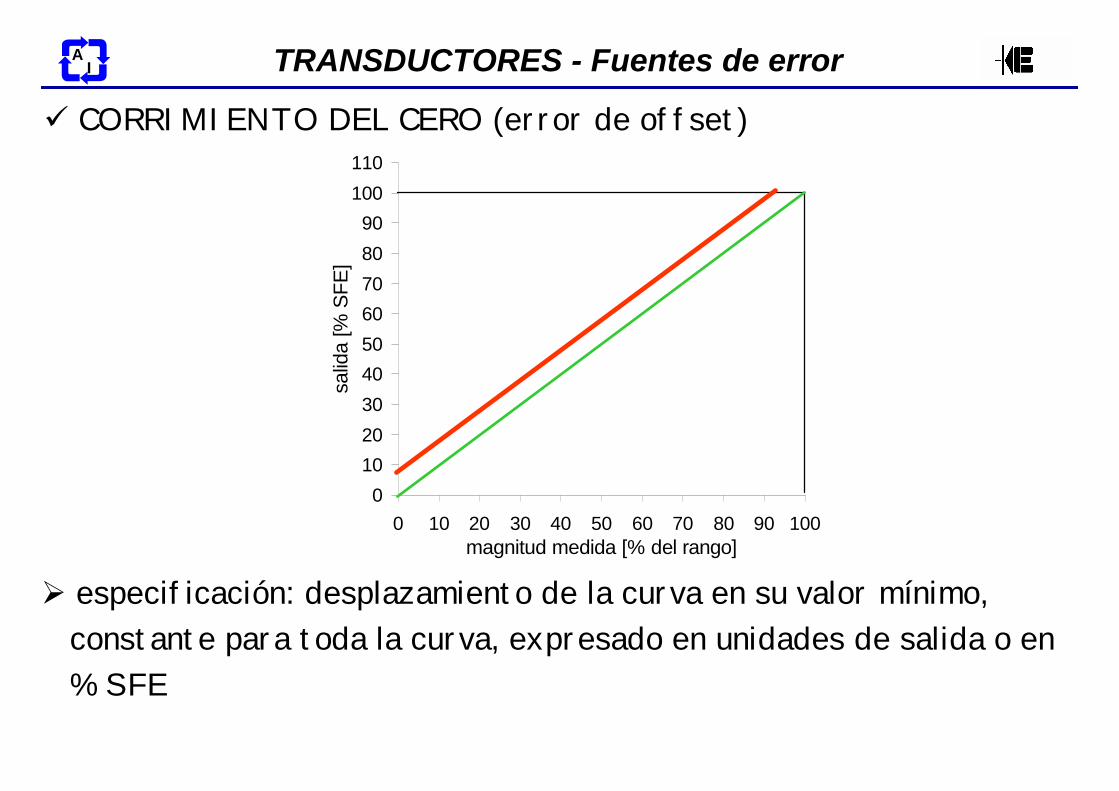
ü CORRIMIENTO DEL CERO (error de offset)
0
10
20
30
40
50
60
70
80
90
100
110
0 10 20 30 40 50 60 70 80 90 100magnitud medida [% del rango]
salid
a [%
SFE
]
Ø especificación: desplazamiento de la curva en su valor mínimo,constante para toda la curva, expresado en unidades de salida o en% SFE
AI TRANSDUCTORES - Fuentes de error
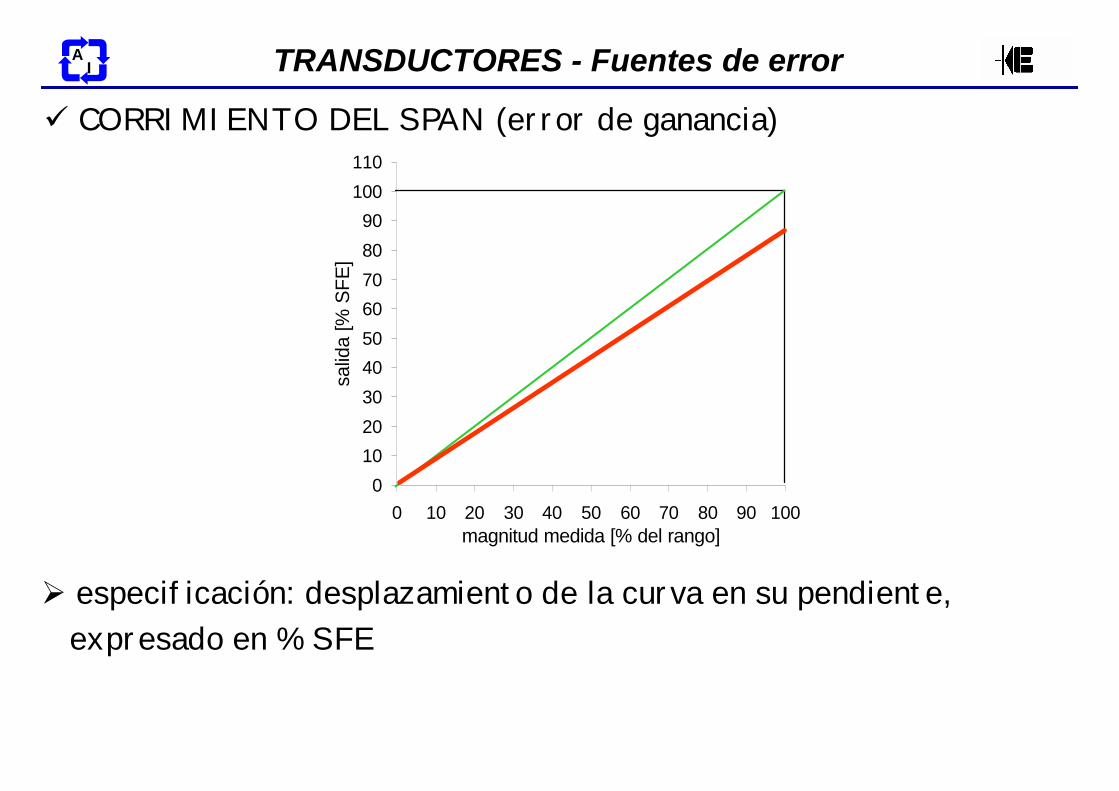
ü CORRIMIENTO DEL SPAN (error de ganancia)
0
10
20
30
40
50
60
70
80
90
100
110
0 10 20 30 40 50 60 70 80 90 100magnitud medida [% del rango]
salid
a [%
SFE
]
Ø especificación: desplazamiento de la curva en su pendiente,expresado en % SFE

AI TRANSDUCTORES - Fuentes de error
ü BANDA DE ERROR
0
10
20
30
40
50
60
70
80
90
100
110
0 10 20 30 40 50 60 70 80 90 100magnitud medida [% del rango]
salid
a [%
SFE
]
Ø especificación: banda de desviaciones máximas de los valores desalida respecto de una línea especificada, debido a causasatribuibles al transductor, expresada en % SFE

AI Automatización Industrial
• OBJETIVOS DEL CAPÍTULO V
– Conceptos Generales– Fuentes de error en sensores–– Medición de TemperaturaMedición de Temperatura– Medición de Fuerza– Medición de Presión

AI TERMOCUPLAS
ü PRINCIPIO DE FUNCIONAMIENTO:EFECTO SEEBECK
Ø Si 2 conductores diferentes A y B forman un circuito unidospor sus extremos y ambos extremos se mantienen a diferentes Ta,circula una corriente proporcional al ∆T.(se hace presente una f.e.m. Termoeléctrica)

AI TERMOCUPLAS
0ºC 500ºC 1000ºC
Cobre 0 mV 6,4 mV 18,6 mVNíquel 0 mV -6,16 mV -12,11 mVChromel 0 mV 16,21 mV 34,47 mVConstantan 0 mV -20,79 mV -43,85 mV
Ta puntode medida
Material
Ø f.e.m. térmica de algunos materiales (referencia: Platino)

AI TERMOCUPLAS
ü ESQUEMA DE MEDICIÓN
Unión sensora
Unión referencia
lectura
P
N
Px
Nx
R
Ø P: material que entrega una tensión termoeléctrica positivaØ Px: conductor de características similares a P (de menor costo)Ø N: material que entrega una tensión termoeléctrica negativaØ Nx: conductor de características similares a N (de menor costo)

AI TERMOCUPLAS
Unión sensoraa Ts
Unión referencia a Tref
lectura
P
N
Px
Nx
R
TrefTsmef −≈...
Ø Tref debe permanecer constante (idealmente 0ºC)Ø si Ts es alta, Tref puede ser la Tambiente

AI TERMOCUPLAS
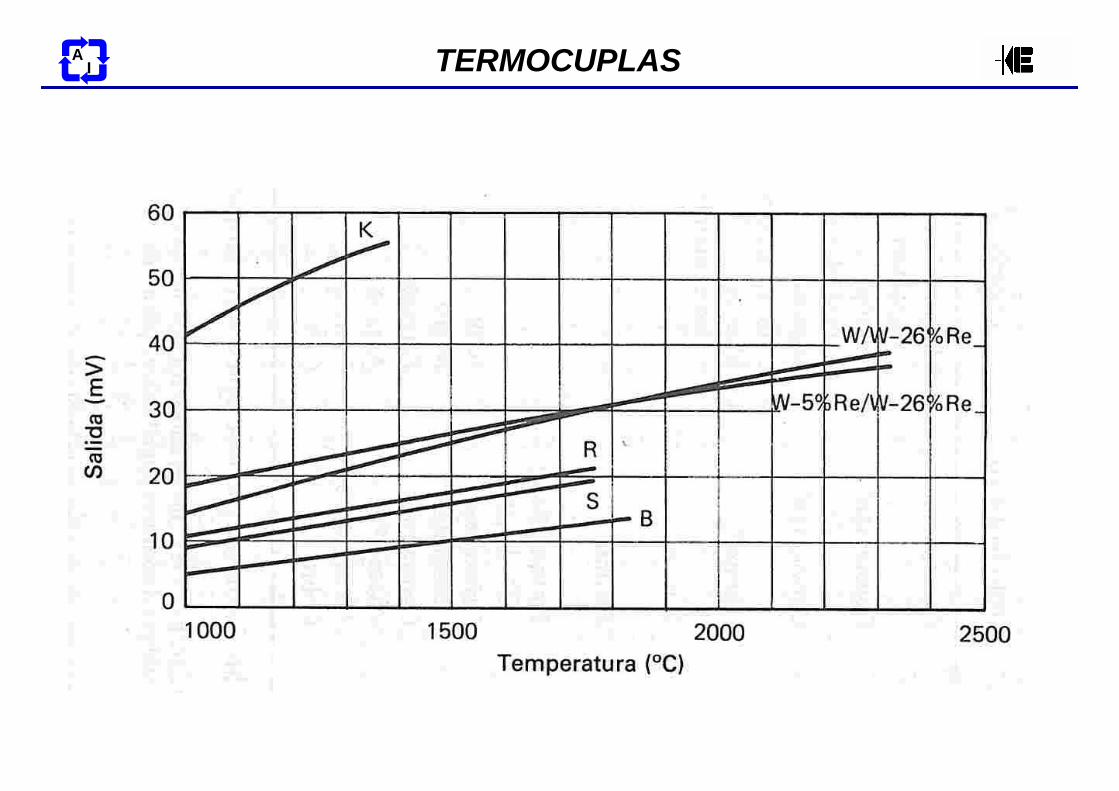
ü DISTINTOS TIPOS
Ø TIPO E:Chromel(+)/Constantan(-)rango continuo=700 ºCsobrecarga=1000 ºC
Ø TIPO J:Hierro(+)/Constantan(-)rango continuo=850 ºCsobrecarga=1100 ºCpara ambientes no oxidantes
Ø TIPO K:Chromel(+)/Alumel(-)rango continuo=1200 ºCsobrecarga=1300 ºCgran resistencia a la corrosión
Ø TIPO T:Cobre(+)/Constantan(-)rango continuo=300 ºCsobrecarga=450 ºCgran precisión
Ø TIPO R:Platino y Rhodio 13%(+)/Platino(-)rango continuo=1700 ºCgran resistencia a la corrosión

AI TERMOCUPLAS
AI TERMOCUPLAS

AI TERMOCUPLAS
ü ASPECTOS CONSTRUCTIVOS Y DE MONTAJE
Ø aislación eléctrica con cerámicas

AI TERMOCUPLAS
Ø aislación mecánica con vainasð resisten a la corrosiónð resisten a golpes (mayor rigidez mecánica)ð resisten al impacto térmicoð perfecto selladoð aunque introducen un retardo puro

AI TERMORESISTENCIAS METÁLICAS
ü PRINCIPIOØ todo elemento conductor aumenta su resistencia eléctrica con latemperatura.Ø una relación aproximada de resistencia en función de temperatura:
)1(0 tRRt α+≅ð Rt: resistencia a la temperatura t en ºCð Ro: resistencia a 0ºCð α : coeficiente térmico de resistencia en Ω/ Ω/ºC
Ø algunos coeficientes:ð platino: 0,003925 (curva USA) - 0,003850 (curva DIN)ð cobre: 0,0043

AI TERMORESISTENCIAS METÁLICAS
ü GENERALIDADES
Ø gran precisiónØ gran rango: -250 a +850 ºCØ perfecta intercambiabilidadØ altamente establesØ resistente a la contaminaciónØ el más empleado es el arrollamiento de platino con 100Ωa 0ºC (PT-100)
Ø baja sensibilidadØ costo medioØ frágil para algunas aplicaciones

AI TERMORESISTENCIAS METÁLICAS
ü ESQUEMA DE MEDICIÓN
Ø se tienen varias configuraciones de conexionado del elementosensor:
ð dos cables:
ð tres cables:
RER1
R2
21 RRRRmR Et ++==
RER1
R2
R3
21
322
211
321
mmt
m
Em
RRR
RRR
RRRR
RRR
−=+=
++===

AI TERMORESISTENCIAS METÁLICAS
ð cuatro cables:
RER1
R2
R3
R4
Vm
I
I
IV
R mt =
Ø autocalentamiento:ð la corriente que atraviesa al elemento sensor genera calor en
el mismo.ð los fabricantes especifican un “factor de autocalentamiento”
(error de temperatura por mW de disipación)
[ ]
=mW
CS
º

AI TERMORESISTENCIAS METÁLICAS
ü ASPECTOS CONSTRUCTIVOS Y DE MONTAJE
ð arrollamiento de hilo de Pt o Ni sobre un núcleo de mica, vidrio,...ð luego de bobinado el hilo debe templarse para > estabilidad R/Tð se recubre con algún material protector

AI TERMORESISTENCIAS METÁLICAS
ütambién pueden envainarseü son de menores dimensiones que las termocuplas, por lo que tienen menores constantes de tiempo

AI Termoresistencias de semiconductor (termistores)
ü PRINCIPIOØ se emplean cerámicas semiconductorasØ al aumentar la temperatura, el semiconductor se torna más
conductor y decae su resistencia (NTC)Ø responden a la ecuación de Steinhart - Hart:
ð donde T: temperatura en KelvinR: resistencia del elementoA, B, C: constantes de ajuste de la curva (el fabricante debe proveerla)
3)(lnln1
RCRBAT
×+×+=
AI TERMISTORES
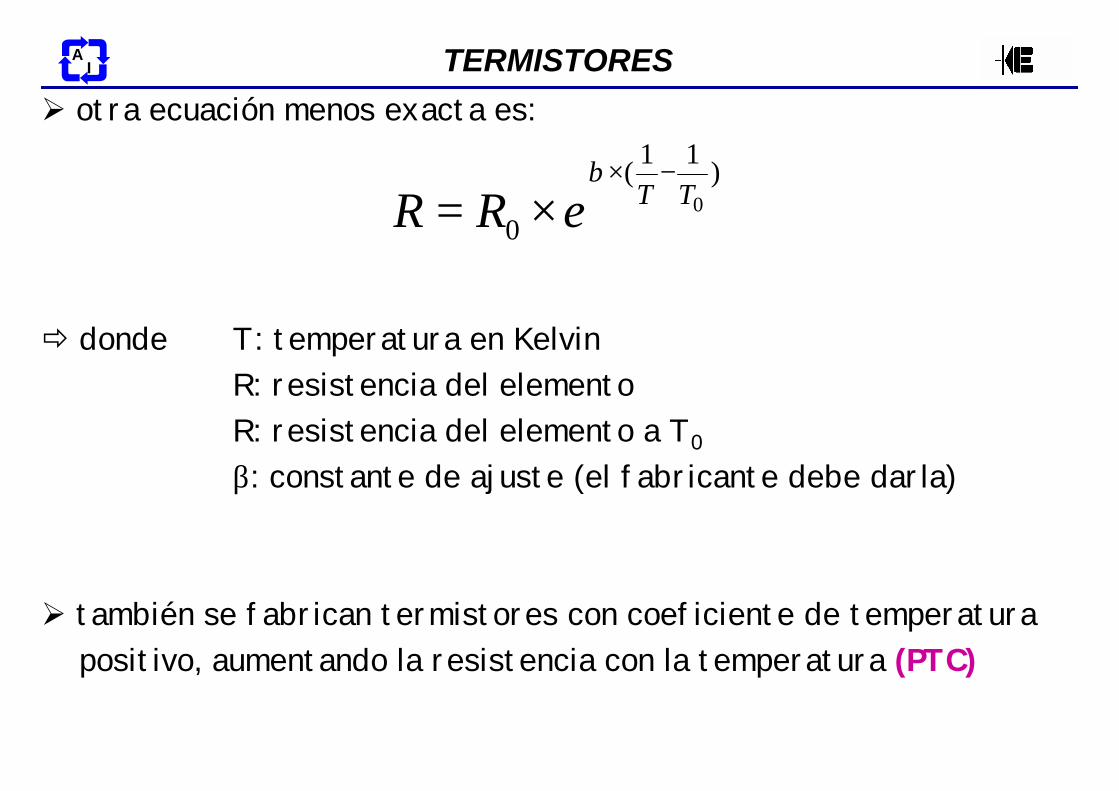
Ø otra ecuación menos exacta es:
ð donde T: temperatura en KelvinR: resistencia del elementoR: resistencia del elemento a T0
β: constante de ajuste (el fabricante debe darla)
Ø también se fabrican termistores con coeficiente de temperaturapositivo, aumentando la resistencia con la temperatura (PTC)
)11
(
00TTeRR
−×
×=β

AI TERMISTORES
ü GENERALIDADES
Ø más sensibles que los PT-100Ø respuesta rápidaØ valores altos de resistencia
(se desprecian las R de conexión)Ø no lo afectan los golpesØ económicosØ rango: -50ºC a +150ºC
Ø son altamente alinealesØ no son fácilmente intercambiables

AI TERMISTORES
ü ESQUEMA DE MEDICIÓN
Ø esquema de conexión:
RE
R1
R2
V
I
I
IV
R mt =
Ø autocalentamiento:ð la corriente que atraviesa al elemento sensor genera calor en
el mismo.ð los fabricantes especifican una “constante de disipación”
(potencia requerida para elevar 1ºC la temperatura del NTCpor sobre la del ambiente)

AI TERMISTORES
ü ASPECTOS CONSTRUCTIVOS Y DE MONTAJEØ existen diversos modelos

AI TERMISTORES
Ø modelos especiales de curva calibradað el fabricante garantiza, al intercambiar un termistor por
otro (del mismo modelo), un cierto error de temperatura paraun determinado rango (p.ej.: ± 0.1ºC entre 0ºC y 75ºC)
ð en general, especifica una tabla de valores

AI CIRCUITOS INTEGRADOS
ü GENERALIDADES
Ø dan salidas en I o V, perfectamente linealesØ proporcionales a temperaturas absolutas ( 1mA/K; 10mV/K )Ømás frágiles que todos los anteriores
Ø Ejemplo: AD592ð 1uA/Kð exactitud (según modelo):
0,3ºC a 1,5ºCð rango: -25ºC a 105ºCð tensión de alimentación:
4VCC a 30VCC

AI Automatización Industrial
• OBJETIVOS DEL CAPÍTULO V
– Conceptos Generales– Fuentes de error en sensores– Medición de Temperatura –– Medición de FuerzaMedición de Fuerza– Medición de Presión

AI SENSORES DE FUERZA
ü PRINCIPIOØ los transductores de fuerza se basan en el sensado de la
deformación de un elemento elástico, cuando se le aplica la fuerzaa medir.Ø Parámetros básicos de diseño:
ð tamaño y formað módulo de elasticidadð sensibilidad a la deformaciónð respuesta dinámica
σ
ε
límite elástico

AI SENSORES DE FUERZA
Ø elementos básicos de sensado de deformación:
ð vigas
ï anillos
ð columnas
ð diafragmas

AI GALGAS EXTENSIOMÉTRICAS
ü PRINCIPIOS
Ø dispositivo formado por un hilo conductor o semiconductor quesensa deformación mediante cambio de resistencia del hilo
Ø su sensibilidad se determina por el FACTOR DE GALGA:
εRR
LLRR
GF∆
=∆∆
=
Ø dondeð GF: factor de galgað ∆R/R: cambio unitario de resistenciað ∆L/L: cambio unitario de longitudð ε: deformación

AI GALGAS EXTENSIOMÉTRICAS
ü ESQUEMA DE MEDICIÓN
Ø Puente de Wheastone desbalanceado:
R2 R3
R1 RG
VoVi
2
4
2
4
])(
[
][
12
12
21
2
3
32
21
2
3
31
+−
−×=
∆
+−
−=
∆+
−∆++
×=
+−
+×=
VoVoVi
GFLL
VoVoViR
R
RRR
RRRR
ViVo
RRR
RRR
ViVo
G
G
GG
G
ð R1 puede ser una galga idénticaa RG para compensación por temperatura

AI GALGAS EXTENSIOMÉTRICAS
ü ASPECTOS CONSTRUCTIVOS Y DE MONTAJE
Ø existen diferentes formas:
ñ un eje ñ dos ejes ñ torsión

AI GALGAS EXTENSIOMÉTRICAS
Ø especificaciones más importantes:ð resistencia nominalð factor de galgað dimensionesð temperatura de servicio
Ø montaje: ð de tipo permanente ð perfectamente solidario al cuerpo sensorð existen pegamentos y otros accesorios especiales
ð deformación máximað sensibilidad en otros ejes

AI CELDAS DE CARGA
ü GENERALIDADES
Ø transductores de fuerza con galgas extensiométricas comoelemento sensor
Ø tienen incorporado un puente de Wheastone
ðRZA: ajuste de cero ðRZC: compensación térmica en
ceroðRSA: ajuste de sensibilidadðRSC: comp. térmica de
sensibilidadðR1-R4: galgas

AI CELDAS DE CARGA
ü ESPECIFICACIONES MÁS IMPORTANTES
Ø rango de medición (Fr)Ø sensibilidad: relación entre la tensión de salida a
plena escala y la tensión de alimentación
Ø linealidadØ histéresisØ repetibilidadØ rango de temperatura de trabajo con
compensación de temperaturaØ tensión de alimentaciónØ sobrecarga segura
FrFx
VsVs CC ××=

AI CELDAS DE CARGA
ü ASPECTOS CONSTRUCTIVOS
Ø diferentes modelos:

AI Automatización Industrial
• OBJETIVOS DEL CAPÍTULO V
– Conceptos Generales– Fuentes de error en sensores– Medición de Temperatura – Medición de Fuerza–– Medición de PresiónMedición de Presión

AI SENSORES DE PRESIÓN
ü GENERALIDADESØ los transductores de presión poseen un elemento mecánico que se
desplaza a partir de la aplicación de una presiónØ básicamente se distinguen cuatro configuraciones de medición:
Presión
Absoluta
Presión
Relativa
Presión
Diferenc
ial
Presión
Diferenc
ial
c/ refe
rencia
interna

AI SENSORES DE PRESIÓN
Ø elementos sensores de presiónDiafragma
Cápsula
Fuelle

AI SENSORES DE PRESIÓN
Tubo de Bourdon Tubo de Bourdonhelicoidal
Tubo de Bourdonespiral

AI MANÓMETROS
ü MANÓMETROS

AI TRANSDUCTOR DE PRESIÓN
ü TRANSDUCTOR DE PRESIÓN CAPACITIVO (de tipo industrial)

AI TRANSDUCTOR DE PRESIÓN

AI TRANSDUCTOR DE PRESIÓN
ü TRANSDUCTOR DE PRESIÓN INTEGRADO(aplicaciones biomédicas e industriales)

AI TRANSDUCTOR DE PRESIÓN





























