-
7/29/2019 Intelligent Classroom
1/6
The Intelligent Classroom: Towards an Educational
Ambient Intelligence Testbed
Rabie A. RamadanComputer Engineering Department,
Cairo University,
Cairo, Egypt,
[email protected]
Hani Hagras, Moustafa Nawito, Amr El Faham,and Bahaa
Eldesouky,
Ambient Intelligence Center, German University in
Cairo,
New Cairo City, Egypt
hani,@essex.ac.uk
Abstract The widespread of embedded computer networksas part of
everyday peoples lives is leading the current
research towards smart environments and Ambient
Intelligence (AmI). AmI is a new information paradigm where
people are empowered through a digital environment that is
aware of their presence and context and is sensitive,
adaptive
and responsive to their needs. In this paper, we describe
the
intelligent Classroom (iClass) which aims to realize the AmI
vision in Education in universities and schools. We will
describe the architecture employed to build the iClass and
we
will present three different directions including the
utilization
of RFID technology, interacting with the user via speech and
developing intelligent agents to learn the user behavior and
adapt to its change over short and long time intervals.
Keywords- intelligent classroom; sensor networks, fuzzy
logic, RFID
I. INTRODUCTIONMark Weiser described the smart environments
as
physical worlds that invisibly interact with smart sensors,
actuators, displays, and computational elements that are
seamlessly implanted into our daily live activities.
However,smart environments have to be associated with different
Artificial Intelligence (AI) techniques and algorithms
including artificial neural networks, evolutionary
computation, swarm intelligence, artificial immune systems,
and fuzzy systems. Together with logic, deductive reasoning,
expert systems, case-based reasoning and symbolic
machinelearning systems, these intelligent algorithms help in
forming
smart environments. Combining the AI techniques and
algorithms with smart environments leads to new research
field named Ambient Intelligence (AmI). AmI is defined
as an electronic environment that is sensitive and
responsive
to the presence of people in specific environment.
AmI techniques and algorithms have been utilized in
many of smart environments research. For instance, at
university of Essex [11] the authors tried to achieve the
vision of ambient intelligence by embedding intelligent
agents in the user environments so that they can control
them
according to the needs and preferences of the user. A novel
fuzzy learning and adaptation technique for agents that are
embedded in ambient intelligence environments have been
presented.In the field of education, ambient intelligence also
plays a
key role. For instance , there are some efforts that have
been
done in this regard including North Carolina State
Universitys Web Lecture System (MANIC) [10], theBerkeley
Multimedia Research Centers Lecture Browser
[7], , AutoAuditorium [1], STREAMS [9], and AutoTutor
[12].
The recent advances in RFID technology made it possible
to somehow to have the advantages of using passive tags
with high frequency ranges. These RFIDs have been used in
many applications; for example, it has been used for
personidentification as in universities and/or companies.
Nowadays,
new passports save information like, a digital picture of
the
owner, a digital version of the passport and biometric
information about the owner in the passport's RFID tag
permanently. There are many other applications that involve
RFID usage in hospitals, animal identification,transportation,
stores payments, and banks [4].
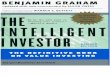
Figure 1 shows the market in terms of RFID tags sold for
different purposes. As can be seen, the RFID technology is
used most for retail apparel while is almost neglected for
people identification; only 1.3 million tags are sold for
this
purpose. However, we believe that our iClass is one of the
fields that prove the importance of RFID in educational
smart environments.
In this paper, we introduce a unique testbed for
educational ambient intelligence classroom (iClass) where
different AmI techniques and algorithms have beenexploited. The
paper describes the iClass architecture (as part
of Ambient Intelligence center at German University ofCairo
(GUC)) in terms of hardware and networking. Section
III, portrays the importance of RFID technology in
classroom environment. Section IV presents how the user
can interact via speech with the iClass. Section V presenthow
the iClass can learn the user behavior and adapt to it
over short and long time intervals.
-
7/29/2019 Intelligent Classroom
2/6
Figure 1: RFID market in different areas
II. ICLASS ARCHITECTUREThe iClass as shown in Figure 2 is a test
bed for
educational ambient intelligence system. The iClass looks
like any other classroom containing normal furniture as in a
usual room, including the desks, chairs, white board and a
smart board. However, the iClass consists of a large number
of embedded sensors, actuators, processors and aheterogeneous
network. The iClass is a multiuser space that
can be used through different teaching activities. As shown
in Figure 2, there is a standard multimedia PC that combines
a projector with a flat-screen monitor and another digital
monitor, which is placed outside the class to inform
students
with the starting and ending time, name of the lecture topicand
any other announcements related to the given course as
shown in Figure 3.
Figure 4 shows the iClass network infrastructure. The
iClass is equipped with a weather station. In addition the
iClass has the following sensors and actuators: time of the
day and date, internal light level sensor, external light
level
sensor, internal temperature sensor, external temperaturesensor,
humidity sensor and a presence sensor. The effectors
can control the following in the class: six dimmable spot
lights, two window blinds and heater/cooler air
conditioning.
These sensors and actuators are obscured in the class with
the intention that the user should be completely unaware of
the intelligent infrastructure of the class, which is required
to
reach the aim of educational ambient intelligence. Although
the iClass looks like any other class, the ceiling and walls
hide numerous networked embedded devices residing on two
different networks: Lonworks and IP network. Thesenetworks
provide the diverse infrastructure present in
ubiquitous-computing environments and let us develop
network independent solutions. Because we need to manageaccess
to the devices, gateways between the different
networks are critical components in such systems, combining
appropriate granularity with security [6].Lonworks, Echelons
proprietary network, includes a
protocol for automating buildings. Many commercially
available sensors and actuators exist for this system. The
physical network installed in the iClass is the Lonworks
iLON Smartserver network which provides the gateway to
the IP network. This server lets us read and alter the statesand
values of sensors and actuators via a standard Web
browser using HTML forms which passes its data to a
notepad file created by a parser java program that the agent
read its input from. Most of the sensors and effectors in
theiClass are connected via a Lonworks network. The Echelons
i.LON SmartServer shown in Figure 5 is the key to
businesss energy conservation and operations strategies. It
not only lets us access, control, and monitor virtually any
electronic device the iClass, but it also gives the power to
use
information intelligently to save energy, improve operations,and
lower maintenance costs.
Figure 2: iClass internal view.
Figure 3: iClass external view.
Figure 4: iClass network infrastructure
Figure 5: Echelons i.LON SmartServer [8]
Figure 6 shows photos of the various sensors and weather
station located with the iClass. The weather station is
installed outside the iClass to measure the outdoor
humidity,cloud cover, wind direction, wind speed, rain fall,
solar
radiation and the outdoor temperatures. Any networked
computer that can run as standard Java process can access
the iClass, thus, this multimedia PC can also act as an
-
7/29/2019 Intelligent Classroom
3/6
interface controlling the devices inside the class room.
Equally, the interface can be accessed from wireless devices
such as the mobile phone using a 3G interface, which is asimple
extension of the web interface, which can monitor
and control the iClass directly. Currently our fuzzy agent
learning mechanism and interface operates from the standard
multimedia PC in the iClass.
III. RFID IN ICLASSIn this section, the role of RFID technology
in iCLass is
explained. There are two RFID readers as shown in Figure 4;
one for the lecturers and the other one for students. Each
lecturer has an RFID tag that includes the lecturer
identifier
(ID). Once the lecturer enters the iClass, the lecturer RFID
reads his/her ID and sends it to the multimedia computer. A
smart agent is designed specially to deal with thisinformation.
The smart agent is designed to lookup the
classroom schedule out of the school schedule and get 1) the
classroom assigned lecturer name and ID at this time, 2) the
students names and IDs that are currently assigned to the
classroom at this time, and 3) a copy from the lecture
materials that were uploaded by the lecturer before the
lecture time. The agent is also responsible for turning on
the
data show and the smart board and shows the materials on
the smart board. On the other hand, once the lecturer is
recognized and students start to enter the class room, the
students RFID reader begins to read their RFID tags andsends
this data to the multimedia computer as well. The
Students process is similar to lecturer process; however, a
timer and a number of times to read are set to the RFID
reader to read the students tags.
To evaluate the overall RFID system, a software agent
has been implemented using dot net on the iClass
multimediacomputer to utilize the automatic attendance of
students
during last semester on one of the subjects. The performance
of such system is tested against manual attendance and found
that the automatic attendance system accuracy is on average
97% which are acceptable results. The other 3% error
percentage was due to the time threshold that we set and/or
the problem with RFID signals. The time threshold that we
set restricts the student attendance to half of the lecture
time
while manual attendance (lecturer takes the attendance by
himself/herself) does not have this condition. The problem
with the RFID signals could be due to students putting
theircards on a wallet and put them on their back bucket, have
other cards with them or unethical issues such as a student
having other classmates cards.
IV. SPEECH INTERACTION WITH THE ICLASSSpeech communication is an
essential part of human
psychology. In fact, through the speech communication
human symbolic behavior can be studied. It is also one of
the oldest academic discipline as well as one of the most
modern academic interests. However, speech
communication is not only limited to human
interpersonalcommunication, but also extended through
technological
mediation such as telephony, movies, radio, television, and
the Internet which reflect the dominance of spoken
communication in many of the human psychological aspects.
Figure 6: The iClass sensors, weather station and
multimediavideoprojector.
The challenge is in designing spoken communication
language between the human and the computer where the
computer can listen, speak, understand and more importantlyto
learn. Therefore, it is expected with modern technology,
the current interest will be in developing voice
controllable
systems. it is also expected that the human-machine spoken
language will change the way we live and work [14].
One of the challenges in iClass is to allow speech
interaction with its users. Since iClass software was builtwith
modularity in mind, we were able to import one of the
speech recognition library named Sphinx-4 [13]. In
iClass speech interaction, we utilized the features
introduced
in Sphinx-4 library for the benefit of iClass environment
control. Along with Sphinx-4 speech recognition library, we
had to define our grammar for iClass control. This grammar
includes, Open light, Close light, Amplify light, Decreaselight,
Open curtain, Close curtain, Amplify curtain, Decrease
curtain, Open air condition, Close air condition, Amplify
air
condition, and Decrease air condition commands.
In addition, we designed a fuzzy agent named Speech
Recognizer Based Intelligent Fuzzy Agent (SRBFA). It is
based on unsupervised data-driven one-pass approach for
extracting fuzzy rules and membership functions from data
to teach a fuzzy controller that will model the users
behaviors. The data is collected by monitoring the user in
the environment over a period of time. The learned Fuzzy
Logic Controller (FLC) provides an inference mechanism
that will produce output control responses based on the
current state of the inputs. Our adaptive FLC will
thereforecontrol the environment on behalf of the user and will
also
allow the rules to be adapted and extended online,
facilitating life-long learning as the users behavior driftsand
environmental conditions change over time.
SRBFA is comprised of five phases in addition to the
environment readings, as shown in Figure 7, :1) monitoring
the users interactions and capturing input/output data
associated with their actions (the user input is done
through
speech and interface; 2) extraction of the fuzzy
membershipfunctions from the data; 3) extraction of the fuzzy
rules
-
7/29/2019 Intelligent Classroom
4/6
from the recorded data; 4) the agent controller; 5)
life-long
learning and adaptation mechanism.
Figure 7: SRBFA phases
It is necessary to be able to categorize the accumulated
user input/output data into a set of fuzzy membership
functions which quantify the raw crisp values of the sensors
and actuators into linguistic labels, such as normal, cold,
or
hot. SRBFA is based on learning the particularized
behaviors of the user and, therefore, requires thesemembership
functions to be defined from the users
input/output data recorded by the agent. A clusteringapproach
[2] based on fuzzy-C-means (FCM) clustering was
used for extracting fuzzy membership functions from the
user data.
Our dataset of user instances contains many attributes.
We start by generating p initial clusters using the FCM
approach. Each cluster has a center , which is an r-
dimensional vector having rcentroid values . The final
cluster centers are then converted to the extracted fuzzy
sets
(linguistic labels).We used that algorithm because it is ableto
learn the individual behavior of the user. Different
memberships were generated for different users due to
thedifferent behaviors of the users observed when the iClass
interface was used in the first experimental phase.
To study the performance of our speech interaction
system, we conducted different experiments. In one of
theseexperiments the user had to spend three consecutive days
inside the iClass. Once the user entered the iClass, he
recorded a voice sample which allowed the system to
recognize the speaker successfully and created the user
profile to associate the fuzzy rules with as it was the
firsttime for the user to use the classroom.
As shown in Figure 8, during the first day, the user had to
define the meaning of each voice commands to the system
on different environmental conditions. The system rate
oflearning new rules was the highest on that day. As any
surrounding condition is changed while adapting the classroom,
the system had to generate the new rules that are
relative to this adaptation. On the second day the user was
not satisfied by all the adaptation applied by the classroom
when voice command is given. The user had to override
some rules to adapt the system again according to the new
situation. On the third day, the system has stabilized as
theuser was satisfied by the adaptations that occur when he
gave voice commands and no more overriding occurred.
Figure 8: The number of rules learned during the
experiments.
V. AN INTELLIGENT AGENT TO LEARN AND ADAPT TOTHE
USERSBEHAVIOURS
Fuzzy logic is proved to provide a good framework for
modeling various types of uncertainties in information.
Fuzzy Logic Controllers (FLCs), the most popular
application of fuzzy logic, provide an adequate
methodology for designing robust controllers that are able
to
deliver satisfactory performance when contending with the
uncertainty, noise and imprecision attributed to real
worldenvironments.
However, the linguistic and numerical uncertainties
associated with dynamic unstructured environments cause
problems in determining the exact and precise antecedents
and consequents membership functions during the FLC
design. Type-2 fuzzy logic is an extension of ordinary type-1
fuzzy logic where the membership function is fuzzy rather
than crisp. As shown in Figure 9, in type-2 FLCs, the crisp
inputs from the input sensors are first fuzzified into input
type-2 fuzzy sets. The input type-2 fuzzy sets then activate
the inference engine and the rule-base to produce outputtype-2
fuzzy sets. The type-2 FLC rule-base is the same as
that of a type-1 FLC (i.e. a set of IF Then rules). Theonly
difference is that for type-2 rule bases, the antecedents
and/or the consequents will are represented by type-2 fuzzy
sets. The inference engine combines the fired rules and
gives a mapping from input type-2 fuzzy sets to output type-
2 fuzzy sets. The type-2 fuzzy outputs of the inference
engine are then processed by the type-reducer, which
combines the output sets and performs a centroid calculation
that leads to type-1 fuzzy sets called the type-reduced
sets.
The type-reduced sets are then defuzzified to produce crisp
output values.
Our agent operations can be divided into the following
phases (as shown inFigure10):
A. Building individual type-1 fuzzy profiles forinput/output
variables.B. Building the type-2 model for input/output
variables
C. Monitoring users behaviorD. Generating the type-2 FLCE.
System control and adaptationF. Rule-base optimization
In the following subsections, these phases are explained
in some details.
Recognize speech from
user
Capture data on userinteraction
Extract membershipfunction
Extract Fuzzy rules
Agent control and onlinecreation/adaptation to fuzzy
rulesEnvironment
-
7/29/2019 Intelligent Classroom
5/6
Figure 9: Structure of a type-2 FLC
A. Building individual type-1 fuzzy profiles forinput/output
variables
The agent starts by modeling individual type-1 fuzzy
profiles that encapsulate the preferences of individual
users.
These sets are acquired by two different methods. In the
first
method, the agent is adjusted to automatically monitor the
iClass users in the classroom for a certain period of time
and
extracting their fuzzy profiles using some techniques such
as Fuzzy C-Means clustering (FCM) technique [5]. The
second method was intentionally designed to be more intomanual
process. The iClass users are asked to fill in a
carefully crafted survey in which the users fill in only few
values for each fuzzy variable.
B. Building the type-2 model for input/outputvariables
In this phase the system aggregates the individual type-
1 profiles to produce the type-2 fuzzy model for the
input/output variables. The aggregated type-2 model
characterizes the collective behavior of the class occupants
making use of type-2 fuzzy logic capability of incorporating
higher levels of uncertainty. It effectively models the
uncertainties present in the environment especially the
inter-user uncertainties about the meanings of input/output
variables.
C. Monitoring users behaviorAfter building type-2 models, the
system then starts to
monitor users actions in the environment to incrementally
build the system fuzzy rule base. Based on the IAOFIS
approach [3], whenever a user changes actuator settings, the
system records a snapshot of the current inputs (sensor
states) and the outputs (actuator states with the new
altered
values of whichever actuators were adjusted by that user).
The set of accumulated multi-input multi-output data pairs
are then used to construct the rule-base of the system
type-2
FLC.
D. Generating the type-2 FLCNow, the set of interval type-2
membership functions
generated from phase 2 are combined with the accumulated
user input/output data to extract fuzzy rules defining users
collective behavior. After generating the interval type-2
membership functions in the previous stage and generating
the fuzzy rules from the user data in the current phase we
have a type-2 FLC that models the users behavior in the
environment, which makes the system FLC ready to operatethe
iClass on behalf of its occupants.
Figure 10: Phases of operation of the proposed system
E. Agent control and online adaptationOnce the system FLC
rule-base is ready, the system can
take control of the environment. The system FLC regularly
reads sensory values and fuzzifies them into type-2 fuzzysets.
It then uses the rule-base to do inference on the input
sets and produce the type-2 output fuzzy sets representing
the decision taken on behalf of the users which reflects
their
learnt behavior. These type-2 sets are then type-reduced to
produce type-1 fuzzy sets which are then defuzzified into
crisp values used to drive the different actuators in the
classroom.
The system not only controls the environmentreproducing the
users behaviors but also has adaptation
capability. There are two types of adaptation that the
system
can perform:
1. Short term online adaptation: whenever a userintervenes by
actuating one or more of theclassroom actuators to override a
control action bythe system, the system records these
interventions
and updates the rule-base accordingly online.
2. Long term adaptation, as the changes in usersbehavior or in
the operation conditions accumulate
the amount of uncertainty that the system has to
model becomes big enough to degrade the systemperformance. The
system transitions to long term
adaptation by jumping back to phase 3 where users
are monitored again to rebuild the FLC rule-base to
more accurately reflect their preferences.
F.
Rulebase optimizationThe explosion of the rule-base size is a
major problem
in rule-based systems that arises from redundancy in the
rules. In this phase of operation, the system optimizes the
rule-base size by tackling both attribute redundancy and
ruleredundancy. In most of the optimization experiments, the
rule-base to-be-optimized had nine input variables: Time-of-
day, inside light, outside light, inside temperature,
outside
temperature, humidity, wind speed, wind direction and
occupancy.
-
7/29/2019 Intelligent Classroom
6/6
Figure 11 plots the number of eliminated attributes due
to insignificance versus the number of rules in the rule
base.
At rule-base size 1350, the percentage of attributeseliminated
was 44.4% which is nearly half of the antecedent
attributes of the rule base. The optimization phase thus,
not
only helps us to reduce the size of the rule-base and
enhances the overall performance; it also helps extract the
most significant attributes of the users' behavior. The
elimination of irrelevant attributes leads to
substantialreduction in the size of the rule base. After discarding
the
irrelevant attributes (i.e. decreasing FLC input
dimensionality) duplicate rules in the rule-base are
eliminated and the size of the rule-base shrinks
significantly.
Figure 11: The number of rules vs the number of eliminated
attributes
To appreciate the reduction in the rule-base size due to
irrelevant attribute elimination the following example it
suffices to say that eliminating 4 attributes from the input
set of our system resulted in a 99.65% reduction in size.
G. Intelligent Agent EvaluationTo evaluate our systems
performance, we ran the
system controlling the environment for 48 hours with 4users and
recorded the number of rule-base updates that
measures users satisfaction with the system. The system
operated 6 input variables; Time-of-day, inside light,
outside
light, inside temperature and outside temperature andoccupancy.
It controlled 4 output type-2 fuzzy variables:
front window blinds, rear window, front dimmable lights,rear
dimmable lights. Figure 12 shows the cumulative
number of rule-base updates due to user dissatisfaction with
the system behavior or due to encountering new points in
the control surface that haven't been covered during the
monitoring phase. Rule-base updates have been recorded
every triple of hours. Figure 12 clearly suggests growinguser
satisfaction with the system which acceptably gets to a
stable level where few rule updates are required every now
and then due to uncovered points on the control surface or
an occasional change in the users' behavior.
Figure 12: The cumulative number of rule_base updates (adds
or
modifications) vs the operation time.
VI. CONCLUSIONIn this paper, we introduced the architecture of
our
intelligent classroom (iClass) in terms of hardware and
software. In addition, we explained three main components
of the iClass which are RFID , speech interaction, and users
behavior components. Fuzzy logic is utilized in these main
components where a novel Type-2 fuzzy approach is
proposed and implemented to capture the iClass usersbehaviors.
The Type-2 fuzzy approach is also used to
control the iClass different actuators according to the
iClass
occupants. Through a set of experiments, the results proved
the efficiency of our design as well as the used techniques
and algorithms.
REFERENCES
[1] Auto Auditorium. http://www.autoauditorium.com/[2] F.
Doctor, H. Hagras and V. Callaghan, A fuzzy embedded agent-
based approach for realizing ambient intelligence in
intelligentinhabited environments. IEEE Transactions on Systems,
Man, andCybernetics, Part A, Vol. 35, no. 1, pp. 55-65, 2005.
[3] G. Cruz, and R. Hill, Capturing and Playing Multimedia
Events withSTREAMS, In Proceedings of ACM Multimedia94 (October
15-20,San Francisco, CA), ACM/SIGMM, pp. 193-200, 1994.
[4] G. Simson and B. Rosenberg, RFID: Applications, Security,
andPrivacy, ISBN: 0321290968, 2005.
[5] H. Hagras, "Type-2 FLCs: A new generation of fuzzy
controllers,"IEEE Computational Intelligence Magazine, vol. 2, no.
1, pp. 30-43,2007.
[6] H. Hagras, V. Callaghan, M. Colley, G. Clarke, A. P.
Cornish, and H.Duman, "Creating an Intelligent Environment using
embeddedagents", IEEE Intelligent Systems, pp. 12-19, 2004.
[7] http://bmrc.berkeley.edu/frame/projects/lb/[8] i.LON
SmartServer, Echelon Corporation,
http://www.echelon.com/Products/cis/smartserver/default.htm,
2009.
[9]
J. Cooperstock, S. Fels, W. Buxton, and K. Smith,
ReactiveEnvironments: Throwing Away Your Keyboard and
Mouse,Communications of the ACM, Vol. 40, No. 9, September
1997.
[10] M. Stern , J. Steinberg , H. Imm , J. Padhye , and J.
Kurose,MANIC: Multimedia Asynchronous Networked
IndividualizedCourseware, In Proceedings of Educational Multimedia
andHypermedia, 1997.
[11] S. Mello, S. Craig, B. Gholson, S. Franklin, R. Picard, and
A.Graesser, "Integrating Affect Sensors in an Intelligent
TutoringSystem", In Affective Interactions: The Computer in the
AffectiveLoop Workshop at the International conference on
Intelligent UserInterfaces , pp. 7-13, New York: AMC Press,
2005.
[12] T. Zhang, M. Hasegaw-Johnson, and S. E. Levinson
"ChildrensEmotion Recognition in an Intelligent Tutoring
Scenario",Interspeech, 2004.
[13] W. Walker, P. Lamere, P. Kwok, B. Raj, R. Singh, E. Gouvea,
P.Wolf and J. Woelfel,Sphinx-4: A Flexible Open Source Frameworkfor
Speech Recognition, Sun Microsystems Technical Report,
No.TR-2004-139, 2004.
[14] X. Huang, A. Acero, and H. Wuen , Spoken Language
processing, Aguide to Theory algorithm and system development,
Prentice Hall,ISBN-13: 978-0130226167, 2001.