Embed Size (px)
Citation preview


INTENCIONALMENTE EM BRANCO

MINISTÉRIO DA DEFESA
EXÉRCITO BRASILEIRO
DEPARTAMENTO DE EDUCAÇÃO E CULTURA DO EXÉRCITO
MANUAL TÉCNICO
OPERAÇÃO DO RADAR SABER M60
1ª Edição 2016
EB60-MT-23.401

INTENCIONALMENTE EM BRANCO

PORTARIA Nr 22 - DECEx, de 11 de fevereiro de 2016.
Aprova o Manual Técnico Operação do Radar SABER M60 (EB60-MT-23.401), 1ª Edição, 2016 e dá outras providências.
O CHEFE DO DEPARTAMENTO DE EDUCAÇÃO E CULTURA DO EXÉRCITO, no uso da delegação de competência conferida pelo Art 44 das Instruções Gerais para as Publicações Padronizadas do Exército (EB10-IG-01.002), aprovadas pela Portaria do Comandante do Exército Nr 770, de 7 de dezembro de 2011, resolve:
Art 1º Aprovar o Manual Técnico Operação do Radar SABER M60 (EB60-MT-23.401), 1ª Edição, 2016, que com esta baixa.
Art 2º Estabelecer que esta Portaria entre em vigor na data de sua publicação.
Gen Ex JOÃO CAMILO PIRES DE CAMPOS Chefe do Departamento de Educação e Cultura do Exército
Publicada no Boletim do Exército Nr 7, de 19 de fevereiro de 2016

INTENCIONALMENTE EM BRANCO

FOLHA REGISTRO DE MODIFICAÇÕES (FRM)
NÚMERO DE ORDEM
ATO DE APROVAÇÃO
PÁGINAS AFETADAS
DATA

INTENCIONALMENTE EM BRANCO

ÍNDICE DE ASSUNTOS
CAPÍTULO I – APRESENTAÇÃO DO RADAR SABER M60 1.1 Apresentação.......................................................................................................................................... 1-1 1.2 Dados técnicos do material..................................................................................................................... 1-2
CAPÍTULO II – COMPONENTES DO SISTEMA 2.1 Generalidades......................................................................................................................................... 2-1 2.2 Quadripé.................................................................................................................................................. 2-1 2.3 Módulo de Distribuição de Energia.......................................................................................................... 2-2 2.4 Gerador................................................................................................................................................... 2-4 2.5 Pedestal................................................................................................................................................... 2-5 2.6 Antena..................................................................................................................................................... 2-6 2.7 Módulo de Controle e Radiofrequência................................................................................................... 2-8 2.8 Radar Secundário S60 (IFF)................................................................................................................... 2-9 2.9 Luneta...................................................................................................................................................... 2-10 2.10 Unidade de Visualização do Radar....................................................................................................... 2-11 2.11 Unidade de Visualização da Unidade de Tiro....................................................................................... 2-13 2.12 Cabos de Ligação.................................................................................................................................. 2-13
CAPÍTULO III – MONTAGEM, ENERGIZAÇÃO E DESMONTAGEM 3.1 Montagem do Sistema............................................................................................................................. 3-1 3.2 Orientação do Radar............................................................................................................................... 3-9 3.3 Operações para ligar o Radar................................................................................................................. 3-11 3.4 Desmontagem do Sistema...................................................................................................................... 3-22
CAPÍTULO IV – APLICATIVO OPERACIONAL DA UNIDADE DE VISUALIZAÇÃO 4.1 Conceitos Básicos................................................................................................................................... 4-1 4.2 Inicialização e autenticação do Sistema.................................................................................................. 4-2 4.3 Modo Operação....................................................................................................................................... 4-6
CAPÍTULO V – ACONDICIONAMENTO E TRANSPORTE 5.1 Acondicionamento................................................................................................................................... 5-1 5.2 Transporte............................................................................................................................................... 5-5
CAPÍTULO VI – MANUTENÇÃO DE PRIMEIRO ESCALÃO 6.1 Generalidades......................................................................................................................................... 6-1 6.2 Execução da Manutenção de Primeiro Escalão...................................................................................... 6-6

INTENCIONALMENTE EM BRANCO

EB60-MT-23.401
1-1
CAPÍTULO I APRESENTAÇÃO DO RADAR SABER M60
1.1 APRESENTAÇÃO
1.1.1 O Radar SABER M60 (Sensor de Acompanhamento de Alvos Aéreos Baseado na Emissão de Radiofrequência) destina-se a integrar um sistema de defesa antiaérea de baixa altura visando à proteção de infraestruturas críticas, como indústrias, usinas e instalações governamentais. É integrável a sistemas de armas baseados em mísseis ou canhões antiaéreos. Também é capaz de integrar-se ao Sistema de Defesa Aeroespacial Brasileiro (SISDABRA) e ao Sistema de Controle de Espaço Aéreo Brasileiro (SISCEAB), assim como a outros sistemas de interesse.
Figura 1-1 Radar SABER M60
1.1.2 O Radar SABER M60 possui baixo peso e elevada mobilidade, além de suportar a operação em todas as condições climáticas do continente sul-americano. Estas características o tornaram indicado para emprego em operações de defesa externa, bem como em operações de garantia da lei da ordem e em operações de paz.
1.1.3 Dentre as principais características do radar SABER M60, destacam-se as seguintes:
a) informações tridimensionais (distância, azimute e elevação) sobre os alvosaéreos, além de informações derivadas, tais como: velocidade e direção de voo (proa);
b) capacidade de classificação de alvos em helicópteros ou aviões, identificação dotipo de helicóptero e identificação amigo-inimigo (IFF);
1.1 APRESENTAÇÃO 1.2 DADOS TÉCNICOS DO MATERIAL

EB60-MT-23.401
1-2
c) baixa probabilidade de interceptação (LPI – Low Probability of Interception)resultante de uma baixa potência média de transmissão e de avançados meios de proteção eletrônica;
d) reconfigurável e atualizável facilmente, por ser construído com tecnologia de“hardware definido por software”;
d) elevada mobilidade e transportabilidade, podendo ser montado ou desmontadoem menos de 15 minutos por uma guarnição de três homens e transportado em qualquer viatura de capacidade superior a 1 t ou por helicópteros;
e) logística simplificada, pela disponibilidade de suprimento e manutenção de todosos escalões em território nacional; e
f) representação gráfica de medidas de coordenação, tais como: Volume deResponsabilidade de Defesa Antiaérea, Estado de Alerta, Corredores de Segurança, entre outros, segundo o estabelecido na doutrina, podendo ser atualizado ou modificado, de acordo com a necessidade.
1.1.4 O Radar SABER M60 complementa o SISDABRA, contribuindo, assim, para o incremento da capacidade dissuasória do país.
1.2 DADOS TÉCNICOS DO MATERIAL
Dados Gerais
Designação Sensor de Acompanhamento de
Alvos Aéreos Baseado na Emissão de Radiofrequência
Abreviatura SABER M60
Condições de Transporte
Peso Total Bruto 848,85 kg
Peso Total Líquido 357,85 kg
Comprimento total na Posição de Marcha 3,18 m
Largura total na Posição de Marcha 0,88 m
Altura total na Posição de Marcha 1,64 m
Comprimento total na Posição de Operação 3,20 m
Largura total na Posição de Operação 3,20 m
Altura total na Posição de Operação 2,85 m
Temperatura de Operação - 25° a + 45° C
Temperatura de Armazenamento -40 a + 65° C
Alimentação
Alimentação da Rede Comercial 110 a 230 V – CA / 50 a 60 Hz
Gerador Externo Toyama T4000CX com modificações feitas pela
ORBISAT
Alimentação da Caixa de Bateria 28 V - CC
Radar
Alcance Útil 60 km (alvo de 20 m²)
Alcance Mínimo 1750 m
Direção 6400’’’
Teto Máximo Aproximado 5000 m
EB60-MT-23.401
1-3
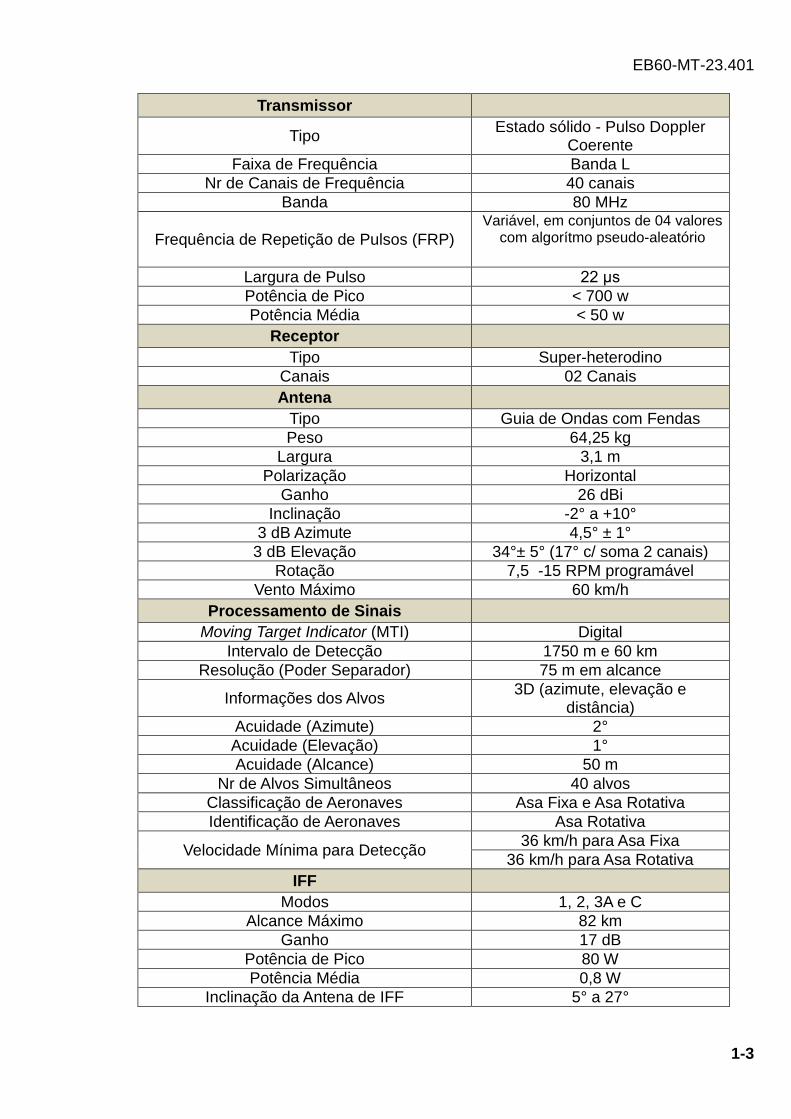
Transmissor
Tipo Estado sólido - Pulso Doppler
Coerente
Faixa de Frequência Banda L
Nr de Canais de Frequência 40 canais
Banda 80 MHz
Frequência de Repetição de Pulsos (FRP)
Variável, em conjuntos de 04 valores com algorítmo pseudo-aleatório
Largura de Pulso 22 μs
Potência de Pico < 700 w
Potência Média < 50 w
Receptor
Tipo Super-heterodino
Canais 02 Canais
Antena
Tipo Guia de Ondas com Fendas
Peso 64,25 kg
Largura 3,1 m
Polarização Horizontal
Ganho 26 dBi
Inclinação -2° a +10°
3 dB Azimute 4,5° ± 1°
3 dB Elevação 34°± 5° (17° c/ soma 2 canais)
Rotação 7,5 -15 RPM programável
Vento Máximo 60 km/h
Processamento de Sinais
Moving Target Indicator (MTI) Digital
Intervalo de Detecção 1750 m e 60 km
Resolução (Poder Separador) 75 m em alcance
Informações dos Alvos 3D (azimute, elevação e
distância)
Acuidade (Azimute) 2°
Acuidade (Elevação) 1°
Acuidade (Alcance) 50 m
Nr de Alvos Simultâneos 40 alvos
Classificação de Aeronaves Asa Fixa e Asa Rotativa
Identificação de Aeronaves Asa Rotativa
Velocidade Mínima para Detecção 36 km/h para Asa Fixa
36 km/h para Asa Rotativa
IFF
Modos 1, 2, 3A e C
Alcance Máximo 82 km
Ganho 17 dB
Potência de Pico 80 W
Potência Média 0,8 W
Inclinação da Antena de IFF 5° a 27°

INTENCIONALMENTE EM BRANCO

EB60-MT-23.401
2-1
CAPÍTULO II COMPONENTES DO SISTEMA
2.1 GENERALIDADES
2.1.1 O Radar SABER M60 possui uma concepção modular, visando facilitar sua operação, manutenção e transportabilidade. Neste capítulo, serão abordadas a composição dos módulos, suas finalidades e outros detalhes relevantes para a operação do equipamento.
2.2 QUADRIPÉ
2.2.1 FINALIDADE
O Quadripé tem por finalidade sustentar, nivelar, elevar e permitir a colocação do Radar SABER M60 em posição.
2.2.2 COMPOSIÇÃO
O Quadripé é dividido em três partes principais (Fig 2-1):
a) Sapatas – São as partes do Quadripé que tocam o solo, sustentando enivelando o equipamento. Cada sapata é dotada de uma cavidade, na qual são colocadas estacas de aço para a ancoragem do Radar, de um parafuso sem fim com uma haste retrátil e uma arruela limitadora, que permitem o ajuste do material às imperfeições do terreno.
b) Conjunto do Tubo Telescópico – É responsável pela elevação do Radar,possuindo em seu interior o dispositivo de elevação acionado pela parafusadeira. Em sua extremidade superior, é fixado o Conjunto Base Pedestal, o qual contém quatro ganchos de fixação. Nessa base, o pedestal é montado e os quatro ganchos de fixação são utilizados para prendê-lo ao Quadripé.
c) Pernas – São as partes do Quadripé que se localizam entre as Sapatas e oTubo Telescópio, tendo a finalidade de sustentar o mesmo. Servem também como base para a instalação da Caixa de Baterias e da Fonte de Alimentação.
2.1 GENERALIDADES 2.2 QUADRIPÉ 2.3 MÓDULO DE DISTRIBUIÇÃO DE ENERGIA 2.4 GERADOR 2.5 PEDESTAL 2.6 ANTENA 2.7 MÓDULO DE CONTROLE E RADIOFREQUÊNCIA 2.8 RADAR SECUNDÁRIO S60 (IFF) 2.9 LUNETA 2.10 UNIDADE DE VISUALIZAÇÃO DO RADAR 2.11 UNIDADE DE VISUALIZAÇÃO DA UNIDADE DE TIRO 2.12 CABOS DE LIGAÇÃO

EB60-MT-23.401
2-2
Fig 2-1 Apresentação do Quadripé
2.3 MÓDULO DE DISTRIBUIÇÃO DE ENERGIA
2.3.1 FINALIDADE
O Módulo de Distribuição de Energia tem a finalidade de alimentar o Sistema Radar com a energia fornecida pelas baterias (28 Volts), as quais podem ser carregadas pelo gerador em 135 VAC ou por energia da rede comercial de 110 a 230 VAC. Além disso, permite a mudança da forma de alimentação sem interrupção do funcionamento.
2.3.2 COMPOSIÇÃO
O módulo é composto pela Caixa de Baterias e Fonte de Alimentação. a) Caixa de Baterias – A Caixa de Baterias consiste numa caixa metálica que
abriga duas baterias comerciais (12V / 55Ah), ligadas em série, responsáveis pela alimentação do Sistema Radar. Ela é composta pela Base da Caixa de Baterias (base de nylon), pela Tampa da Caixa de Baterias e pelas baterias propriamente ditas. Além disso, essa caixa tem dois conectores baionetas para encaixe do cabo M60_W7 e M60_W11. A Base da Caixa de Baterias é encaixada no Quadripé através de canaletas-guias localizadas na base de nylon. Além disso, há um pino para encaixe na base do quadripé, para melhor fixação.
b) Fonte de Alimentação - A fonte de alimentação tem as seguintes funções:- distribuir a energia recebida da Caixa de Baterias; - receber energia de fonte externa para carregamento da bateria; - rotear os comandos entre UC e UV; e - desligar o sistema em caso de emergência.
Sapata
Perna
Tubo Telescópico

EB60-MT-23.401
2-3
- Ela é encaixada no Quadripé através de canaletas-guias localizadas na base de nylon. Na sua parte frontal, possui o Painel de Conectores da Fonte de Alimentação, onde se conectam diversos cabos e, na parte superior, os botões de controle, conforme mostra a figura 2-2:
Fig 2-2 Fonte de alimentação
Conector Descrição
Conector do cabo M60_W1
Conecta-se ao Pedestal. Transfere dados e energia.
Conector do cabo M60_W6
Conecta-se à fonte de energia externa (gerador ou rede comercial).
Conector do cabo M60_W5
Conecta-se à Bobina. Transfere dados do Módulo de Ct e RF e UV do Radar.
Conector do cabo M60_W7
Recebe e transfere energia da Caixa de Baterias
Conector do cabo M60_W15
Alimentação da furadeira CA.
Disjuntor da alimentação por fonte externa
Proteção contra curto-circuito na entrada de tensão alternada (disjuntor de 20 A).
Disjuntor do circuito de baterias
Proteção contra curto-circuito na entrada de tensão da bateria (disjuntor de 70 A).
Botão de emergência Desativa todos os circuitos da Fonte de Alimentação
desligando os relés de potência.
Botão Ligar Liga o Sistema Radar. Possui temporização para evitar
acionamento acidental.

EB60-MT-23.401
2-4
Conector Descrição
Botão Desligar Desliga o Sistema Radar. Possui temporização para evitar
acionamento acidental.
Botão ↑ Botão de interface com usuário.
Botão ↓ Botão de interface com usuário.
Botão ↳ Botão de interface com usuário.
Tab 2-1 Descrição do painel dos conectores e painel de botões da fonte de alimentação
2.4 GERADOR
2.4.1 FINALIDADE
O Gerador (Fig 2-3) tem como função fornecer energia elétrica para o funcionamento do Radar. Ele é utilizado nos casos onde não existe energia elétrica de rede comercial disponível.
2.4.2 RESTRIÇÃO NO USO
2.4.2.1 Deve-se utilizar, EXCLUSIVAMENTE, o gerador fornecido pelo fabricante do Radar SABER M60, a BRADAR Industria S/A, pois o mesmo precisa ser modificado para poder ser utilizado com o Radar. Assim, apenas geradores avaliados e modificados pela BRADAR devem ser utilizados.
2.4.2.2 O Gerador fornecido pela BRADAR é da marca TOYAMA, modelo T4000CX. Neste gerador, modifica-se a tensão de 110Vac para 135Vac e bloqueia-se o uso da tensão 220Vac. Deste modo, o gerador não pode ser utilizado para outros equipamentos.
2.4.2.3 ESTA RESTRIÇÃO DEVE SER RESPEITADA, POIS, OUTROS EQUIPAMENTOS LIGADOS A ESTE GERADOR MODIFICADO SERÃO DANIFICADOS DEVIDO À ELEVAÇÃO DA TENSÃO DE 110VAC PARA 135VAC.
Figura 2-3 Gerador para uso no Radar SABER M60

EB60-MT-23.401
2-5
2.5 PEDESTAL
2.5.1 FINALIDADE
O Pedestal tem a função de sustentar e girar o conjunto das antenas, além de repassar os dados entre o Módulo de Controle e RF para a Fonte de Alimentação.
2.5.2 COMPOSIÇÃO
2.5.2.1. O Pedestal consiste, basicamente, de uma caixa que contém o motor responsável pelo giro da Antena. Seu transporte é realizado por meio de duas alças laterais, e é instalado acima do Quadripé, fixado por quatro ganchos. Além do motor, o Pedestal é composto pela Placa de Transmissão. Esta placa recebe os dados do Módulo de Controle e RF e os repassa para a Fonte de Alimentação, que posteriormente os enviará para a UV do Radar, e vice-versa.
2.5.2.2. Em uma das faces do Pedestal, está o Painel de conexão (Fig 2-5), onde se localiza o conector baioneta do cabo M60_W1 que interliga o Pedestal e Fonte de Alimentação. Nessa mesma face, há um desumidificador e um horímetro, que marca o tempo trabalhado pelo motor. Logo acima do horímetro, está a lâmpada VBAT, que indica se existe passagem de corrente elétrica pela Placa Transmissora. Na parte superior, está o nível circular.
Fig 2-4 Visão da parte superior do Pedestal
Fig 2-5 Painel de conexão do Pedestal
Nível Circular
Alça de
Transporte
Horímetro
EB60-MT-23.401
2-6
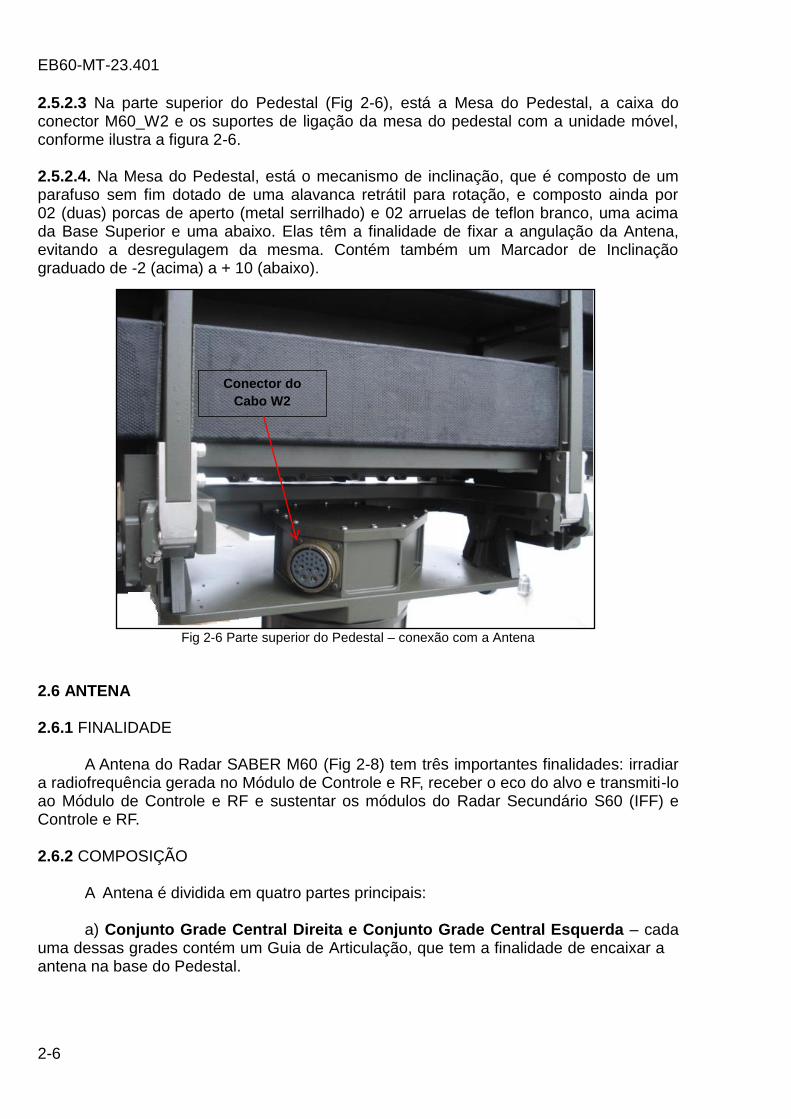
2.5.2.3 Na parte superior do Pedestal (Fig 2-6), está a Mesa do Pedestal, a caixa do conector M60_W2 e os suportes de ligação da mesa do pedestal com a unidade móvel, conforme ilustra a figura 2-6.
2.5.2.4. Na Mesa do Pedestal, está o mecanismo de inclinação, que é composto de um parafuso sem fim dotado de uma alavanca retrátil para rotação, e composto ainda por 02 (duas) porcas de aperto (metal serrilhado) e 02 arruelas de teflon branco, uma acima da Base Superior e uma abaixo. Elas têm a finalidade de fixar a angulação da Antena, evitando a desregulagem da mesma. Contém também um Marcador de Inclinação graduado de -2 (acima) a + 10 (abaixo).
Fig 2-6 Parte superior do Pedestal – conexão com a Antena
2.6 ANTENA
2.6.1 FINALIDADE
A Antena do Radar SABER M60 (Fig 2-8) tem três importantes finalidades: irradiar a radiofrequência gerada no Módulo de Controle e RF, receber o eco do alvo e transmiti-lo ao Módulo de Controle e RF e sustentar os módulos do Radar Secundário S60 (IFF) e Controle e RF.
2.6.2 COMPOSIÇÃO
A Antena é dividida em quatro partes principais:
a) Conjunto Grade Central Direita e Conjunto Grade Central Esquerda – cadauma dessas grades contém um Guia de Articulação, que tem a finalidade de encaixar a antena na base do Pedestal.
Conector do
Cabo W2

EB60-MT-23.401
2-7
b) Pinça para apoio do Módulo de Controle e RF e Articulação do encosto –em cada Conjunto Grade Intermediária, há uma Pinça Grade que tem a finalidade de servir de apoio para o Módulo de Controle e RF. Além disso, os dois conjuntos Grade Intermediária, o Conjunto Grade Central Direita e o Conjunto Grade Central Esquerda, possuem uma articulação do encosto, que tem por finalidade fixar o Módulo de Controle e RF.
Figura 2-7 Base da Antena
c) Antena – A Antena propriamente dita possui 04 irradiadores ocos de metal,identificados de WG-A a WG-D, de baixo para cima. Cada irradiador possui, na face anterior, as ranhuras de saída da RF, cobertas por um Radome feito de Kevlar. O irradiador A se difere dos demais por receber a carga em sua face inferior. Nesta vista da traseira, observa-se que a antena apresenta instalados em sua extremidade esquerda 04 Acopladores de RF e, na extremidade direita, 04 cargas, em cada Irradiador.
Fig 2-8 Antena do radar
Mecanismo de
Inclinação da
Antena
Base Inferior
Base Superior
Irradiadores Suporte dos
Irradiadores
EB60-MT-23.401
2-8
d) Os Irradiadores são sustentados por 06 (seis) Suportes das Guias, numeradosde 01 a 06, da esquerda para a direita, e possuem algumas características:
- os Suportes Nr 01 e Nr 06 possuem Alças de Transportes. - os Suportes Nr 02 e Nr 05 possuem uma “unha”, na qual é encaixado o Módulo
de Controle e RF. Também possuem um jumelo de fixação do Módulo de Controle e RF; - os Suportes Nr 03 e Nr 04 possuem um jumelo de fixação do Módulo de controle
RF e jumelo de fixação do garfo que sustenta o Módulo IFF.
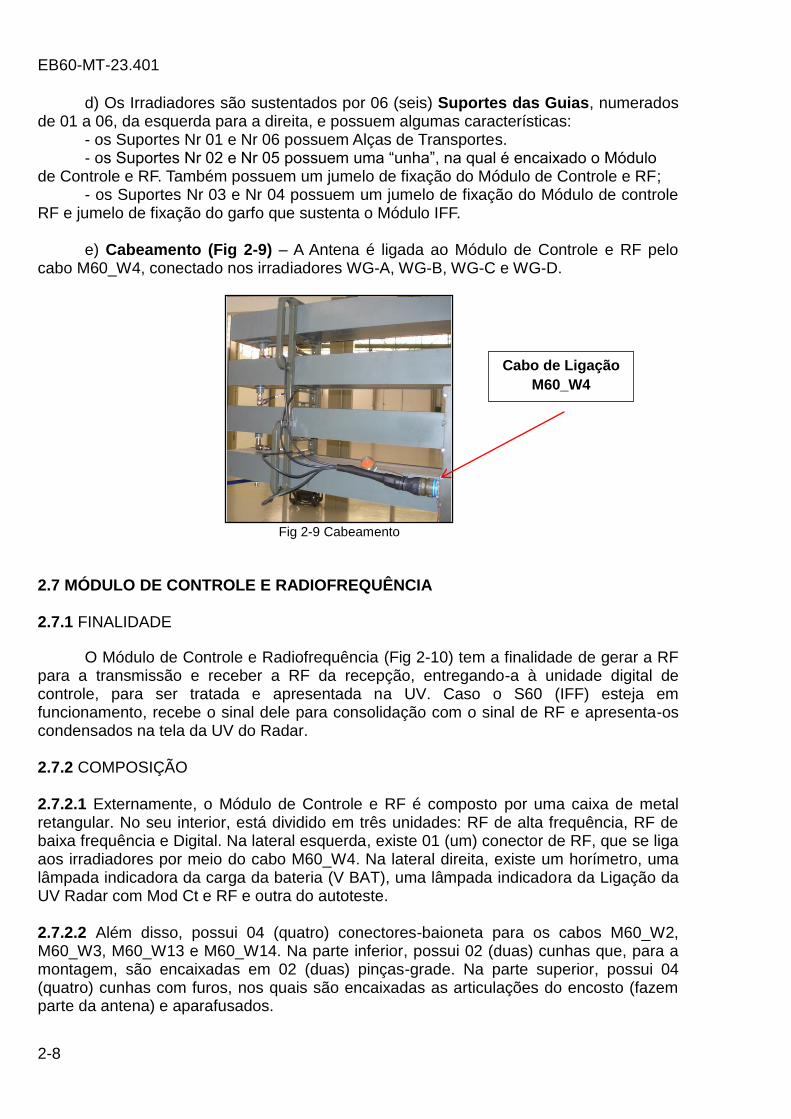
e) Cabeamento (Fig 2-9) – A Antena é ligada ao Módulo de Controle e RF pelocabo M60_W4, conectado nos irradiadores WG-A, WG-B, WG-C e WG-D.
Fig 2-9 Cabeamento
2.7 MÓDULO DE CONTROLE E RADIOFREQUÊNCIA
2.7.1 FINALIDADE
O Módulo de Controle e Radiofrequência (Fig 2-10) tem a finalidade de gerar a RF para a transmissão e receber a RF da recepção, entregando-a à unidade digital de controle, para ser tratada e apresentada na UV. Caso o S60 (IFF) esteja em funcionamento, recebe o sinal dele para consolidação com o sinal de RF e apresenta-os condensados na tela da UV do Radar.
2.7.2 COMPOSIÇÃO
2.7.2.1 Externamente, o Módulo de Controle e RF é composto por uma caixa de metal retangular. No seu interior, está dividido em três unidades: RF de alta frequência, RF de baixa frequência e Digital. Na lateral esquerda, existe 01 (um) conector de RF, que se liga aos irradiadores por meio do cabo M60_W4. Na lateral direita, existe um horímetro, uma lâmpada indicadora da carga da bateria (V BAT), uma lâmpada indicadora da Ligação da UV Radar com Mod Ct e RF e outra do autoteste.
2.7.2.2 Além disso, possui 04 (quatro) conectores-baioneta para os cabos M60_W2, M60_W3, M60_W13 e M60_W14. Na parte inferior, possui 02 (duas) cunhas que, para a montagem, são encaixadas em 02 (duas) pinças-grade. Na parte superior, possui 04 (quatro) cunhas com furos, nos quais são encaixadas as articulações do encosto (fazem parte da antena) e aparafusados.
Cabo de Ligação
M60_W4

EB60-MT-23.401
2-9
Fig 2-10 – Módulo de Controle e Radiofrequência
2.8 RADAR SECUNDÁRIO S60 (IFF)
2.8.1 FINALIDADE
O Radar Secundário S60 (IFF) tem por finalidade realizar a identificação de aeronaves como amigas ou inimigas pelos modos de interrogação, e saber seu nível de voo pelo modo C. Pode operar em conjunto ou não com a Antena.
2.8.2 COMPOSIÇÃO
O Radar Secundário S60 (IFF) possui 04 (quatro) componentes principais:
a) Antena do IFF – Caixa metálica selada, de forma retangular, destinada aacomodar e proteger os elementos radiantes da antena.
b) Módulo Transceptor e Controle do IFF – Caixa metálica selada, de formaretangular. Essa caixa e a antena do IFF são fixadas uma na outra, formando um único módulo, o qual vai encaixado na Antena do primário. O módulo transceptor e controle do IFF tem por finalidade transmitir para a Antena do IFF o sinal de interrogação destinada à aeronave, e recebe da Antena o sinal de resposta, enviando-o para o Módulo de Controle e RF para ser processado e apresentado na tela. Na lateral, existe um conector-baioneta para o cabo M60_W3. Além disso, possui um horímetro e sílica gel.
c) Armação – A Armação tem por finalidade fixar a Antena do IFF e módulotransceptor e controle do IFF na Antena do Radar. É fixada na base superior da Antena do Radar primário por meio da haste de suporte do conjunto IFF.
d) Mecanismo de Inclinação da Antena do S60 (IFF) (Fig 2-11) – Tem afinalidade de regular a elevação da Antena do IFF; é composto por um Trinco de Fixação responsável por manter o suporte travado em uma elevação específica. A Escala Graduada do Mecanismo de Inclinação da Antena de IFF varia de 5° a 27°, sendo numerada de dois em dois graus e é ajustada por um Parafuso Serrilhado e um Apontador de Metal.

EB60-MT-23.401
2-10
Fig 2-11 Transceptor/Receptor e Mecanismo de inclinação da antena do Radar Secundário S60
2.9 LUNETA
2.9.1 FINALIDADE
A Luneta (Fig 2-12) tem a finalidade de orientar o Sistema Radar. Este pode ser orientado por qualquer processo, mas para facilitar a troca de dados com as U Tir, utiliza-se o Norte Magnético como referência.
2.9.2 COMPOSIÇÃO
Luneta de tiro comercial, modelo 3-9 x (56 mm, 40 mm ou 32 mm), presa em suporte na base superior do pedestal. Possui a regulagem de distância na lente anterior e a regulagem de foco na lente posterior.
Fig 2-12 Luneta de orientação
Mecanismo de
Inclinação
Transmissor/Receptor

EB60-MT-23.401
2-11
2.10 UNIDADE DE VISUALIZAÇÃO DO RADAR
2.10.1 FINALIDADE
A Unidade de Visualização (UV) do Radar (Fig 2-13) tem por finalidade apresentar visualmente, em tempo real, as informações contidas no eco e no sinal de resposta do IFF, para a interpretação, ação do operador e emissão de ordens e comandos.
2.10.2 COMPOSIÇÃO
A Unidade de Visualização do Radar é um Computador Portátil, robustecido, estruturado em uma maleta plástica que apresenta os seguintes componentes:
a) Tela da UV - tela de Matriz Ativa de 14 polegadas, onde é apresentado oAplicativo Operacional.
b) Teclado Universal – Teclado universal para a entrada de dados, que permite aooperador interagir com o Aplicativo Operacional.
c) Conjunto Lateral de Conectores (Fig 2-14) – Compartimento de conexõesprotegidas que apresenta entradas padrão, distribuídas da esquerda para a direita:
- conector tipo PS/2 para ligação de mouse/teclado; - conector tipo RJ-45, para conexão da Unidade de Visualização do Radar à Rede
Ethernet; - conectores tipo firewire para entrada e saída de dados em alta velocidade; - conectores tipo USB (2) para ligação eventual de periféricos; - conectores tipo P2 (3) para entrada de microfone, saída e entrada de áudio; - porta tipo PCMCIA para conectar placas de expansão; e - conector tipo RJ-11 para conexão com a internet.
Fig 2-13 Unidade de visualização do radar

EB60-MT-23.401
2-12
Fig 2-14 Conjunto lateral de conectores
d) Conjunto Traseiro de Conectores (Fig 2-15) – Compartimento de conexõesprotegidas que apresenta as seguintes entradas, distribuídas da esquerda para a direita:
- conectores militares tipo RS-422 (3), dotados de tampas de proteção metálicas, destinados à conexão dos cabos M60_W8 e M60_W9. O cabo M60_W8 deve ser ligado ao segundo conector do Conjunto Traseiro de Conectores e é destinado a ligar a Unidade de Visualização do Radar com a Bobina Metálica. O cabo M60_W9 deve ser ligado ao terceiro conector e é destinado à alimentação (19 V) da UV do Radar;
- conector de Alimentação, destinado à conexão do cabo de alimentação, ligando a UV Radar à rede comercial de energia;
- conector tipo DVI, para saída de vídeo digital; - conector tipo DB-15 (CRT), para a saída de vídeo VGA; - conector tipo docking para dispositivos móveis; - porta paralela para impressoras ou outros dispositivos; e - conectores tipo serial DB9 (2) para comunicação RS-232.
Fig 2-15 Conjunto traseiro de conectores
Conector tipo PS/2 Conectores Firewire Conectores P2 Conector RJ-11
Conector RJ-45 Conectores USB Porta tipo PCMCIA
Conectores do cabo
M60_W8
Conector
Docking
Conector
CRT
Conector de
Alimentação

EB60-MT-23.401
2-13
2.11 UNIDADE DE VISUALIZAÇÃO DA UNIDADE DE TIRO
2.11.1 FINALIDADE
2.11.1.1 A Unidade de Visualização da Unidade de Tiro / Posto de Vigilância (U Tir/P Vig) (Fig 2-16) é um computador de mão, conectado por rádio ao COAAe, destinado a permitir a recepção/transmissão de informações em tempo real.
2.11.1.2 O objetivo da UV é receber e transmitir, em tempo real, as informações necessárias à execução dos trabalhos da U Tir, visando diminuir o tempo de reação da defesa antiaérea, tornando-a mais eficiente, e permitindo ao sistema de armas destruir e/ou neutralizar a ameaça aérea, de modo a evitar que o vetor de ataque atinja o alvo defendido.
2.11.2 COMPOSIÇÃO
A UV da U Tir é composta do computador palmar e de um equipamento rádio, que ligado à UV tem a capacidade de transmitir e receber informações.
Fig 2-16 UV da U Tir ligada ao equipamento rádio
2.12 CABOS DE LIGAÇÃO
2.12.1 FINALIDADE
Os Cabos de Ligação são responsáveis pela transmissão de energia e dados entre os componentes do Radar. Embora os cabos de ligação e conectores sejam todos etiquetados e gravados, o sistema de cabeamento do Radar SABER M60 foi concebido utilizando um sistema de conexões que garante a inviabilidade da instalação errônea dos cabos.

EB60-MT-23.401
2-14
2.12.2 COMPOSIÇÃO Os Cabos de Ligação do Radar receberam a denominação iniciada pela letra W, e foram distribuídos da seguinte maneira:
CABO LIGAÇÃO TIPO
M60_W1 Fonte de Alimentação - Pedestal Alimentação e Dados
M60_W2 Pedestal - Módulo de controle e RF Alimentação e Dados
M60_W3 Módulo de Ct e RF - Transmissor/Receptor do
IFF Alimentação e Dados
M60_W4 Módulo de Controle e RF - Antena do Radar Alimentação e Dados
M60_W5 Bobina - Fonte de Alimentação Alimentação
M60_W6 Fonte de Alimentação - Gerador Externo Alimentação
M60_W7 Fonte de Alimentação - Caixa de Baterias Alimentação
M60_W8 Bobina - UV do Operador do Radar Dados
M60_W9 Bobina - UV do Operador do Radar Alimentação e Dados
M60_W10 Bobina - UV do Oficial de Controle Alimentação e Dados
M60_W11 Caixa de Baterias – Furadeira DC Alimentação
M60_W12 Fonte de Alimentação – Ethernet (externa) Dados
M60_W13 Módulo de Controle e RF - GPS/Bússola Alimentação e Dados
M60_W14 Módulo de Controle e RF – Manutenção (IHM) Dados
M60_W15 Fonte de Alimentação – Furadeira AC Alimentação Tab 2-2 Composição dos cabos de ligação

EB60-MT-23.401
3-1
CAPÍTULO III MONTAGEM, ENERGIZAÇÃO E DESMONTAGEM
3.1 MONTAGEM DO SISTEMA
3.1.1 INTRODUÇÃO
A montagem do Radar SABER M60 é um processo simples, mas que requer atenção e empenho por parte da Guarnição, devido aos cuidados com o material e com o pessoal, assim como à rapidez requerida pela Defesa Antiaérea (DA Ae).
3.1.2 MONTAGEM DO RADAR
3.1.2.1 Para a execução da montagem do Radar devem ser respeitadas as orientações contidas no Memento de Segurança do Radar e nesse Capítulo. A montagem do Radar será abordada de forma contínua, com especial atenção aos módulos, do inferior para o superior. Para montar o Sistema, devem-se realizar as seguintes ações:
a) Retirar o Quadripé de sua caixa.
Fig 3-1 Quadripé
A retirada do Quadripé de sua caixa deve ser realizada por 03 militares dando especial atenção para o peso do material. Checar se os ganchos de fixação do pedestal estão rosqueados.
3.1 MONTAGEM DO SISTEMA 3.2 ORIENTAÇÃO DO RADAR 3.3 OPERAÇÕES PARA LIGAR O RADAR 3.4 DESMONTAGEM DO SISTEMA
EB60-MT-23.401
3-2
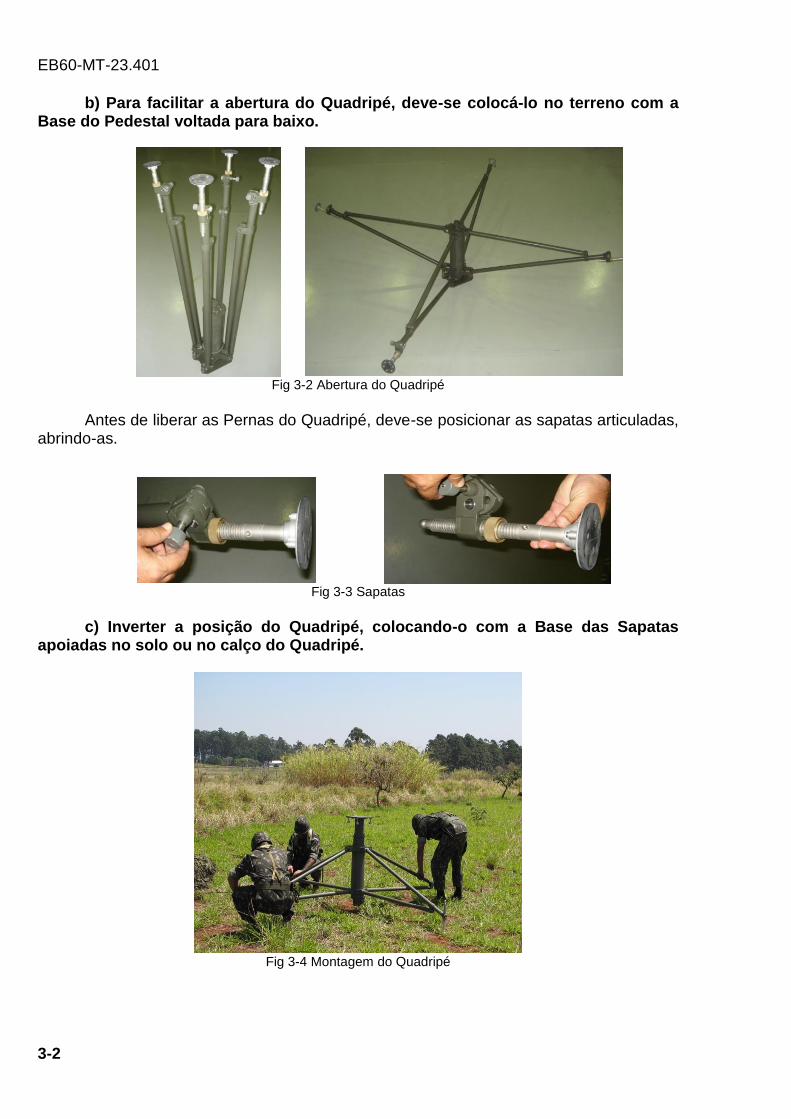
b) Para facilitar a abertura do Quadripé, deve-se colocá-lo no terreno com a Base do Pedestal voltada para baixo.
Fig 3-2 Abertura do Quadripé
Antes de liberar as Pernas do Quadripé, deve-se posicionar as sapatas articuladas, abrindo-as.
Fig 3-3 Sapatas
c) Inverter a posição do Quadripé, colocando-o com a Base das Sapatas
apoiadas no solo ou no calço do Quadripé.
Fig 3-4 Montagem do Quadripé

EB60-MT-23.401
3-3
- Realizar o travamento da haste do tubo telescópico.
Fig 3-5 Travamento da haste do tubo telescópico
- Ao colocar o Quadripé no solo, deverá ser realizado o nivelamento, visando
adaptar o componente às imperfeições do terreno, por meio do acionamento das hastes retráteis do parafuso sem fim. Este nivelamento é finalizado quando o pedestal estiver montado, pois o mesmo possui um nível circular.
Fig 3-6 Nivelamento do Quadripé
d) Retirar o Pedestal de sua caixa e montá-lo sobre a Base do Tubo Telescópico do Quadripé. O pedestal possui uma seta serigrafada em uma das faces laterais (Fig 3-7). O quadripé também possui uma seta na base do Pedestal. Essas marcações têm por finalidade definir o sentido de encaixe do pedestal.

EB60-MT-23.401
3-4
Fig 3-7 Setas serigrafadas no Pedestal e na base do tubo telescópico do Quadripé
e) Fixar o Pedestal no Quadripé. A fixação do Pedestal ao Quadripé deve ser realizada por dois militares e é realizada pelos 04 (quatro) ganchos de fixação, localizados na base do eixo telescópico. Os ganchos de fixação devem ser desrosqueados, encaixados no pedestal e rosqueados novamente até que fiquem completamente presos, pois, caso isso não ocorra, os sensores existentes na Base do Pedestal acusarão a não fixação do mesmo no BIT do Aplicativo Operacional.
Fig 3-8 Fixação dos ganchos na montagem do Pedestal

EB60-MT-23.401
3-5
f) Retirar os componentes do Sistema de Distribuição de Energia e montá-los sobre as Pernas do Quadripé. A Caixa de Baterias é encaixada sobre as pernas do Quadripé, respeitando a respectiva marcação, devendo ser montada por dois militares. A Fonte de Alimentação é encaixada sobre as pernas do Quadripé, respeitando a respectiva marcação, devendo ser montada por dois militares.
Fig 3-9 Sistema de Distribuição de Energia instalado no Quadripé
g) Retirar o Módulo de Controle e Radiofrequência e a Antena do Radar de sua caixa Primeiramente, deve-se retirar o Módulo de Controle e RF, o qual é fixado na antena, acomodando-o em algum lugar para posteriormente ser fixado novamente na antena, quando esta estiver montada. Após isso, a Antena do Radar deve ser retirada de sua caixa por três militares, pelas Alças de Transporte. Essa atividade deve ser realizada com cuidado, evitando qualquer choque físico ou queda da Antena.
h) Montar a Antena do Radar sobre a Base da Antena, no Pedestal.
- A fixação da Antena do Radar no Pedestal deve ser realizada por três militares. As duas guias de articulação presentes no Conjunto Grade Central Direita e Conjunto Grade Central Esquerda devem ser encaixadas no Bloco Base Esquerdo e Bloco Base Direito.
Fig 3-10 Montagem da Antena
- Após o encaixe, posicionar os manípulos na horizontal e rosquear os mesmos. Os quatro manípulos devem ser rosqueados até que fiquem completamente presos, pois,

EB60-MT-23.401
3-6
caso isso não ocorra, os sensores existentes no Pedestal acusarão a não fixação da mesma no BIT do Aplicativo Operacional.
Fig 3-11 Manípulos
i) Encaixar o Módulo de Controle e Radiofrequência na Antena. Devido a seu peso, deve ser manuseado por 02 (dois) militares, evitando, assim, a possibilidade de choque físico ou queda. Ao encaixar o módulo na antena, os dois militares devem permanecer segurando e um terceiro militar deve rosquear o cabo M60_W2.
Fig 3-12 Módulo de Controle e Radiofrequência
j) Fixar o Módulo de Controle e Radiofrequência à Antena do Radar.
- O Módulo de Controle e RF deve ser fixado à Antena do Radar, com sua face posterior voltada para a face anterior dos Irradiadores, por meio das cunhas de fixação, localizadas na superfície inferior do módulo e por meio dos 04 (quatro) jumelos de fixação, localizados na face superior da Antena. O encaixe das cunhas é realizado nos compartimentos de encaixe (unhas), localizados nos Suportes 02 e 05 da Antena. O encaixe dos jumelos de fixação do Módulo de Controle e RF estão localizados nos suportes 02, 03, 04 e 05 da Antena.
- Após a fixação do Módulo de Controle e RF, deve-se fixar o garfo que sustenta o IFF com os jumelos de fixação do garfo localizados nos suportes 03 e 04.

EB60-MT-23.401
3-7
Fig 3-13 Fixação do Módulo de Controle e Radiofrequência
l) Retirar o Radar Secundário S60 (IFF) (formado pela Antena de IFF e Módulo Transceptor e Controle do IFF) de sua caixa e fixá-lo no seu suporte. O módulo S60 é fixado ao sistema por meio do Suporte de IFF. Para fixar o módulo, deve-se encaixar as Roldanas de Teflon, localizadas na Barra de Sustentação nas Garras de Apoio do Suporte da Antena de IFF e, posteriormente, prender o Mecanismo de Inclinação da Antena de IFF no Trinco de Fixação, localizado na barra transversal do Suporte da Antena de IFF.
Fig 3-14 Montagem do Radar Secundário S60 m) Retirar a Luneta de sua caixa e fixá-la no Suporte número 03 da Antena do Radar. Para fixar a Luneta ao Sistema, devem-se afrouxar os dois parafusos de fixação da Base da Luneta, colocando seus dentes no dente inferior do Suporte da Luneta. Deve-se ainda apertar manualmente, apesar da fenda, os parafusos da Base da Luneta e regular o seu Suporte.

EB60-MT-23.401
3-8
Fig 3-15 Fixação da Luneta
n) Realizar a conexão dos Cabos de Ligação do Sistema.
A montagem dos cabos deve a última fase da montagem, visando evitar a ocorrência de acidentes durante a montagem do Radar. Devem-se ligar os cabos de conexão na seguinte ordem: a) M60_W4 ou M60_W4-A, M60_W4-B, M60_W4-C e M60_W4-D (para os radares fornecidos com estes cabos) no Módulo de Controle e RF; b) M60_W3, conectando o Módulo de Controle e RF ao Módulo Transceptor e Controle do IFF; c) M60_W2, conectando o Pedestal ao Módulo de Controle e RF; d) M60_W1, conectando a Fonte de Alimentação ao Pedestal; e) M60_W5, conectando a Bobina na Fonte de Alimentação. Deve-se esticar a Bobina antes de continuar as conexões; f) M60_W8 e M60_W9 (ou M60_W10), ligando a Bobina à Unidade de Visualização do Operador do Radar; g) M60_W6, conectando a Fonte de Alimentação ao Gerador Externo ou a uma tomada de energia comercial, usando o “rabicho” adequado; e h) M60_W7, ligando a Fonte de Alimentação à Caixa de Baterias.
Fig 3-16 Conexão dos cabos

EB60-MT-23.401
3-9
3.2 ORIENTAÇÃO DO RADAR
3.2.1 FINALIDADE
A orientação do Radar tem a finalidade de permitir o alinhamento entre a direção virtual da Antena, apresentada na Tela da UV do Radar, e a direção real de emissão.
3.2.2 MATERIAL NECESSÁRIO
Para a realização da orientação do Radar, é necessária a utilização da Luneta do Radar e de uma Bússola, se disponível.
3.2.3 EXECUÇÃO
O processo de orientação do Radar é baseado no Norte Magnético, e pode ser realizado de duas formas distintas, em função da existência ou não de um ponto nítido no terreno nesta direção. Em qualquer uma das formas, a orientação deve ser realizada com o radar ainda desligado.
3.2.3.1 Com ponto nítido na direção do Norte Magnético
a) Tomando por base o local onde será instalado o Radar, orientar-se para o NorteMagnético com a bússola.
b) Localizar um ponto nítido no terreno no azimute do Norte Magnético.c) Balizar o local de onde foi realizada a leitura com uma estaca.d) Montar o centro do Quadripé sobre a estaca.e) Montar o Radar, sem elevá-lo (Telescópio retraído).f) Girar manualmente a Antena do Radar em direção e elevação, visando o ponto
nítido com a Luneta e alinhando seu retículo sobre o ponto. g) Na tela “Ajustar Radar” do Aplicativo, o campo Ang QM deve ser preenchido
com o valor 0 (zero).
3.2.3.2 Sem ponto nítido na direção do Norte Magnético
a) Tomando por base o local onde será instalado o Radar, orientar-se para o NorteMagnético com a bússola.
b) Localizar um ponto nítido no terreno o mais próximo possível da direção doNorte Magnético.
c) Medir o Azimute do ponto nítido no terreno, anotando o valor da leitura.d) Balizar o local de onde foi realizada a leitura com uma estaca.e) Montar o centro do Quadripé sobre a estaca.f) Montar o Radar, sem elevá-lo (Telescópio retraído).g) Girar manualmente a Antena do Radar em direção e elevação, visando o ponto
nítido com a Luneta e alinhando seu retículo sobre o ponto. h) Na tela “Ajustar Radar” do Aplicativo, o campo Ang QM deve ser preenchido
com o valor adquirido pela bússola eletrônica.

EB60-MT-23.401
3-10
3.2.3.3 Em caso de inexistência de pontos nítidos no terreno, deverá ser instalada uma baliza distanciada de 100 metros da posição do Radar na direção do Norte Magnético e proceder a Orientação do Sistema baseado na mesma.
Fig 3-17 Orientação sem ponto nítido no terreno
3.2.4 RECOMENDAÇÕES DE DISTÂNCIA PARA A MONTAGEM DE MAIS DE UM RADAR SABER M60
Recomenda-se uma distância mínima de 10 km entre radares para a operação.
10 km Fig 3-18 Distância mínima entre radares
3.2.5 VERIFICAÇÃO DA EMISSÃO POR MEIO DE DETECTOR DE RADIOFREQUÊNCIA
Primeiramente, encaixar o detector de RF no multímetro. O marcador (+) do detector deve ser encaixado no multímetro na posição V e o marcador (-) do detector deve ser encaixado na posição COM do multímetro. Após isso, posicionar a chave seletora do multímetro na posição com fundo de escala 20V DC. Posicionar o detector o mais próximo possível do radar, de modo que operador não fique em risco de contato

EB60-MT-23.401
3-11
físico com a antena. Posicionar a face do detector que não tem texto, de frente para as antenas do radar. Quando a frente das antenas estiver virada na direção do detector, deve ocorrer um pico de tensão na leitura do multímetro. O resultado esperado é essa variação de tensão com pico quando a antena estiver virada para o detector.
Fig 3-19 Detector de radiofrequência conectado ao multímetro
3.3 OPERAÇÕES PARA LIGAR O RADAR
3.3.1 LIGANDO O SISTEMA
O Radar é ligado em duas etapas. Primeiro, energiza-se o sistema e, depois, coloca-se o Radar em operação.
3.3.2 ENERGIZANDO O SISTEMA
Quando o Radar for alimentado por uma tomada de energia comercial, deve-se garantir que a tensão esteja dentro da faixa operacional da Fonte de Alimentação, que é de 110 a 230 VAC. Se o Radar estiver conectado à energia via gerador externo, deve-se, primeiro, ligar o gerador. O gerador deve ser o que foi fornecido pela BRADAR, modelo Toyama T4000CX com modificações.
3.3.2.1 Procedimento para ligar o gerador
Com o disjuntor do gerador desligado, executar a seguinte sequência de operações:

EB60-MT-23.401
3-12
Fig 3-20 Ligando o Gerador (parte 1)

EB60-MT-23.401
3-13
Fig 3-21 Ligando o Gerador (parte 2)
3.3.2.2 Procedimento para energizar o Radar
a) No painel da fonte de alimentação, liberar o botão EMERGENCIA, girando-o no sentido anti-horário. Em seguida, pressionar e manter pressionado o botão LIGAR, por pelo menos 6 segundos ou até aparecer no display da Fonte de Alimentação a seguinte mensagem:
Fig 3-22 Display: Ligar
b) Em seguida, liberar o botão LIGAR. O display deve apagar. Para verificar o “status” da Fonte de Alimentação, em qualquer momento, utiliza-se o botão ENTER. Pressionando e soltando o botão ENTER, o display irá mostrar, durante 2 (dois) segundos, 4 (quatro) valores de parâmetros internos da Fonte de Alimentação:

EB60-MT-23.401
3-14
Fig 3-23 Display: consultar parâmetros
- BATI – é o valor de corrente que está sendo fornecido para carregar a bateria (valor negativo), ou o valor de corrente fornecido pela bateria para alimentar o Radar (valor positivo);
- TEMP – é o valor da temperatura interna da Fonte de Alimentação, na região dos conversores DC/DC (em graus Celsius);
- CA – é o valor RMS da tensão alternada fornecida para a Fonte de Alimentação;
- BATV – é a tensão nos terminais do conjunto de baterias.
c) Existem, também, alguns LEDs de “status”:- BAT INVERTIDA; - BAT CONECTADA; - CA CONECTADA; - CARREGADOR OK; - TENSÃO BAT OK; - UPS OK.
3.3.2.3 Possíveis problemas ao ligar
a) Se a tensão alternada de entrada da Fonte de Alimentação estiver fora doslimites máximo e/ou mínimo especificados, no momento que ligar a Fonte de Alimentação, ela irá, através do display, informar o problema e não ligará.
b) Se o conjunto de baterias não estiver ligado à Fonte de Alimentação, esta iráindicar isto através do display e não permitirá ser ligada.
c) Se a Fonte de Alimentação estiver ligada a um gerador ou a uma tomada deenergia comercial, com valor de tensão dentro da faixa especificada, a tensão BATV no display deve estar próxima a 28V.
d) Se mesmo com a energia AC OK, a tensão BATV no display for igual ou menorque 26V, indica que há problema com os conversores internos da Fonte de Alimentação.

EB60-MT-23.401
3-15
e) Se o status mostrado no display da Fonte de Alimentação indica que está tudo OK, inicia-se o procedimento para colocar o Radar em operação. 3.3.3 COLOCANDO O RADAR EM OPERAÇÃO 3.3.3.1 O Radar deve estar ligado para ser conectado ao sistema UV. 3.3.3.2 O Radar é colocado em operação por meio da Unidade de Visualização do Radar, de forma lógica e sequencial, conforme será apresentado abaixo. a) Ligar o laptop. b) Autenticar o usuário do sistema operacional. c) Usuário: “opRadar”. d) Senha: entregue em um envelope separado. e) Clicar no ícone UV-M60, localizado na área de trabalho do sistema, para iniciar o Aplicativo Operacional. f) Na posição de operação da UV do Radar, selecionar o perfil “Op Radar” ou “Op Radar & COAAe S” (Fig 3-24).
Fig 3-24 Determinar perfil
g) Autenticar o último usuário cadastrado (Fig 3-25).

EB60-MT-23.401
3-16
Fig 3-25 Autenticar usuário
h) Selecionar a operação militar (Fig 3-26).
Fig 3-26 Determinar a Operação Militar
i) Confirmar que foram seguidos todos os procedimentos de segurança (Fig 3-27),que podem ser consultados por meio do botão “Ler Memento” (Fig 3-28).
Fig 3-27 Procedimentos de segurança

EB60-MT-23.401
3-17
Fig 3-28 Ler Memento j) Selecionar a opção “Operação” na tela do menu (Fig 3-29).
Fig 3-29 Menu
l) Ajustar o grupo data-hora (GDH) do sistema (Fig 3-30).
Fig 3-30 Ajustar GDH

EB60-MT-23.401
3-18
m) Após aparecer a PPI, que é a tela de visualização dos alvos, acessar o menu“Radar/Unidades” para criar a unidade do Radar, caso ainda não o tenha sido (Fig 3-31).
Fig 3-31 Unidades
n) Para criar a Unidade, clicar no botão “Inserir” e preencher todos os campos(Fig 3-32).
- Descrição: Adicionar uma referência ao Radar. - Tipo da Unidade: selecionar 'Unidade de Controle'. - IP ou Porta: informar o número da porta serial RS422 na qual o cabo W9 (ou
W10) está conectada: 2 ou 3. - Posição: o sistema preenche automaticamente com as coordenadas do Radar
em uma posição em Campinas. O usuário pode alterar esses valores durante o cadastro da unidade ou na tela de Ajustar Radar.
- Altitude: o sistema preenche automaticamente com a altitude do Radar em uma posição em Campinas. O usuário pode alterar esses valores durante o cadastro da unidade ou na tela de Ajustar Radar.
- Tipo de Dispositivo: selecionar opção “Serial”.
Fig 3-32 Inserir Unidade
o) Após inserir, selecionar a Unidade criada e clicar no botão “Associar” (Fig 3-33)para associar a unidade à operação.

EB60-MT-23.401
3-19
Fig 3-33 Associar unidades
p) Após cadastrar a Unidade, acessar o menu Radar/Conexão, selecionar a unidade criada no passo anterior e clicar no botão “Conectar (Fig 3-34)
Fig 3-34 Conexão 3.3.3.3 Ao se estabelecer a primeira conexão com o Radar, o sistema apresenta a tela “Ajustar Radar” (Fig 3-35), onde devem ser preenchidas as informações de montagem.
a) Ang IFF deve ser ajustado conforme o ângulo definido no mecanismo de inclinação do S60.
b) O campo Ang Ant deve ser ajustado conforme o ângulo definido no mecanismo de inclinação da antena. Esse dado pode ser preenchido manualmente pelo operador, ou automaticamente, ao clicar no botão “Bússola Eletrônica”, se estiver habilitado. Este campo fica desabilitado quando o sistema não possui uma bússola instalada ou quando os dados dela estão imprecisos.
c) O campo Pos relativa norte magnético deve ser preenchido automaticamente ao clicar no botão “Bússola Eletrônica”, se estiver habilitado. Este campo fica desabilitado quando o sistema não possui uma bússola instalada ou quando os dados dela estão imprecisos. O valor apresentado deve ser preenchido no campo Ang QM.
d) O campo Ang QM deve ser ajustado conforme o valor obtido na consulta da bussola referente à Pos relativa norte magnético.
e) Os campos E, N e H devem ser preenchidos com os valores de coordenadas Longitude, Latitude e Altitude, respectivamente, de acordo com a unidade de medida

EB60-MT-23.401
3-20
selecionada no campo Coor (GEO ou UTM). No caso de utilizar coordenada UTM, deve-se informar também a Zona UTM e o Hemisfério referente a esta coordenada.
f) A conexão é concluída após esses dados serem confirmados, pois são indispensáveis para o funcionamento do Radar.
Fig 3-35 Ajustar radar: informações de montagem
g) Caso o usuário selecione a opção “Cancelar”, o sistema emite uma mensagem informando que o Radar não possui os dados de montagem (Fig 3-36). Ao confirmar, o sistema desconecta o radar.
Fig 3-36 Cancelar informações de montagem
h) No entanto, essa mensagem é apresentada apenas na primeira conexão com o Radar. Caso o Radar já esteja em operação e seja desconectado do Aplicativo, ele deve ser conectado novamente. Em uma reconexão, a tela Ajustar Radar é apresentada com o botão “Confirmar” desabilitado caso a desconexão ocorra enquanto a antena está em movimento. Dessa forma, o operador deve clicar no botão “Cancelar” para continuar a operação. Caso a antena esteja parada, o botão “Confirmar” estará habilitado, de forma que os valores poderão ser editados.
EB60-MT-23.401
3-21
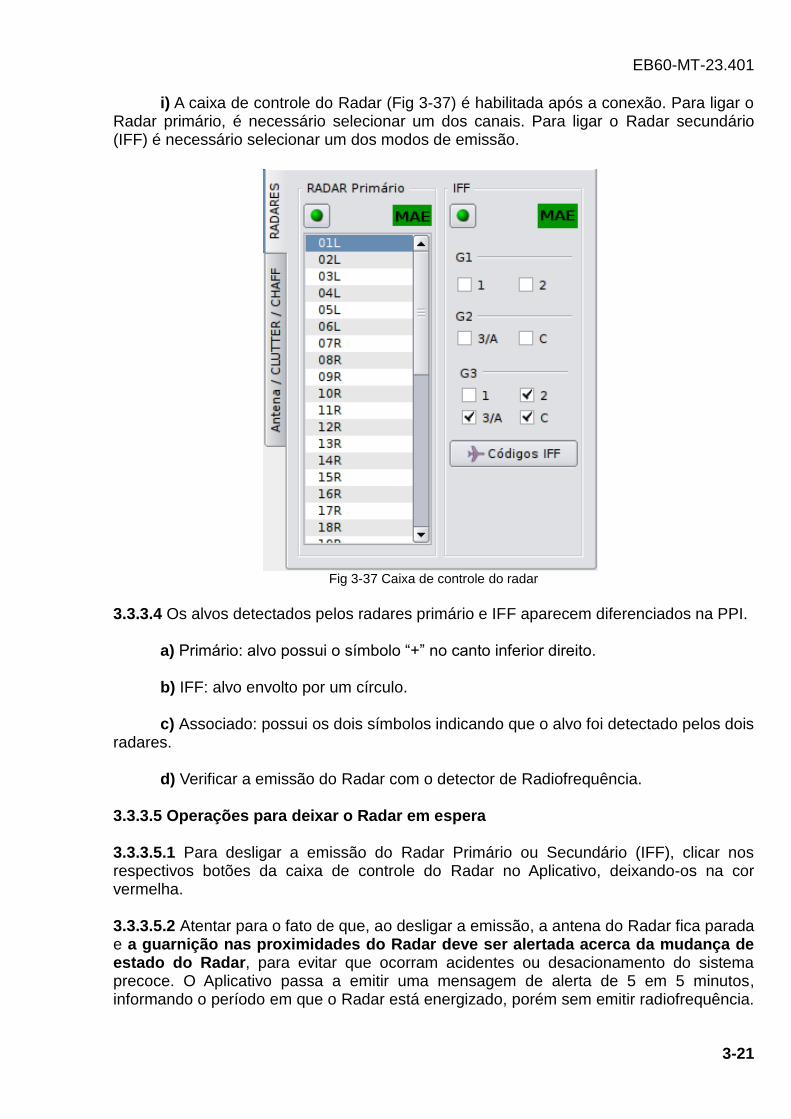
i) A caixa de controle do Radar (Fig 3-37) é habilitada após a conexão. Para ligar o Radar primário, é necessário selecionar um dos canais. Para ligar o Radar secundário (IFF) é necessário selecionar um dos modos de emissão.
Fig 3-37 Caixa de controle do radar 3.3.3.4 Os alvos detectados pelos radares primário e IFF aparecem diferenciados na PPI.
a) Primário: alvo possui o símbolo “+” no canto inferior direito.
b) IFF: alvo envolto por um círculo.
c) Associado: possui os dois símbolos indicando que o alvo foi detectado pelos dois radares.
d) Verificar a emissão do Radar com o detector de Radiofrequência. 3.3.3.5 Operações para deixar o Radar em espera
3.3.3.5.1 Para desligar a emissão do Radar Primário ou Secundário (IFF), clicar nos respectivos botões da caixa de controle do Radar no Aplicativo, deixando-os na cor vermelha. 3.3.3.5.2 Atentar para o fato de que, ao desligar a emissão, a antena do Radar fica parada e a guarnição nas proximidades do Radar deve ser alertada acerca da mudança de estado do Radar, para evitar que ocorram acidentes ou desacionamento do sistema precoce. O Aplicativo passa a emitir uma mensagem de alerta de 5 em 5 minutos, informando o período em que o Radar está energizado, porém sem emitir radiofrequência.

EB60-MT-23.401
3-22
Após 30 minutos sem operação, o Aplicativo desliga todo o Radar, incluindo a Fonte de Alimentação.
3.4 DESMONTAGEM DO SISTEMA
3.4.1 INTRODUÇÃO
A sequência de desmontagem é iniciada pelo desligamento do Sistema Radar através do Aplicativo Operacional e seguida pela desmontagem dos módulos propriamente ditos. Assim como a montagem, deve-se ter atenção para detalhes pertinentes à segurança da guarnição e cuidados com o material.
3.4.2 DESLIGAMENTO DO SISTEMA
3.4.2.1 No Aplicativo Operacional, clicar no menu “Sessão” e na opção “Desligar”.
3.4.2.2 Será habilitada a opção:
a) Radar: desliga o Radar SABER M60, incluindo a Fonte de Alimentação. Nestecaso, não se deve realizar a desconexão do Aplicativo com o Radar.
b) UV: desliga o Aplicativo Operacional ou o computador.
3.4.2.3 O desligamento do sistema Radar também pode ser feito pressionando por 6 segundos o botão Desliga da Fonte de Alimentação.
3.4.2.4 O desligamento do sistema em caso de emergência deve ser feito utilizando o botão EMERGENCIA. No entanto, seu uso frequente pode danificar os componentes eletrônicos.
3.4.3 DESMONTAGEM
Para a desmontagem do sistema, segue-se a seguinte sequência.
3.4.3.1 Desligar o Aplicativo Operacional.
3.4.3.2 Desligar a Fonte de Alimentação.
3.4.3.3 Desconectar os cabos ligados à UV do Radar e enrolar a bobina.
3.4.3.4 Soltar as Alavancas de Fixação do Telescópio e, por meio da parafusadeira, abaixar o Sistema Radar.
3.4.3.5 Desinstalar a Luneta de Orientação, agindo nos parafusos de fixação e movendo-a para a retaguarda por meio da corrediça.
3.4.3.6 A partir deste momento, todo material que for desmontado deve ser acondicionado na sua respectiva caixa.
EB60-MT-23.401
3-23
3.4.3.7 Desconectar os cabos manualmente (somente M60_W2 será desmontando posteriormente).
Não existe a necessidade de usar ferramental. Após a retirada dos cabos, tampar os conectores.
3.4.3.8 Desmontar o S60 (IFF).
Desatarraxar os parafusos de fixação da armação e abaixá-la. Soltar o trinco de fixação e puxar a antena liberando as roldanas de teflon dos seus alojamentos, soltando assim a Antena do IFF por completo.
3.4.3.9 Desmontar o Módulo de Controle e RF.
Desatarraxar os 04 (quatro) parafusos superiores e elevar o módulo, retirando as cunhas dos berços, liberando-o. Antes de retirar totalmente, é necessário retirar o cabo M60_W2.
3.4.3.10 Desmontar a Antena do Radar.
Antes de desmontar a antena, deve-se registrar 0 (zero) no ângulo de inclinação. Feito isso, desaparafusar, manualmente, os 04 manípulos de fixação da antena, até o fim. Abaixar a antena e movê-la até que a Base Inferior da Antena perca o contato com a parte superior do Pedestal.
3.4.3.11 Desmontar o Pedestal do Quadripé.
Desatarraxar os Ganchos de Fixação da Base do Pedestal até o final, e retirá-lo de cima do Quadripé. Antes de colocar o Pedestal na caixa, a UV do Radar já deve estar em seu alojamento. Reapertar os ganchos de fixação do Quadripé.
3.4.3.12 Desmontar a Caixa de Baterias e Fonte de Alimentação do Quadripé.
Elevar a Caixa de Baterias retirando-a das pernas do Quadripé. Devido ao peso, deve ser desmontada por dois militares. Elevar a Fonte de Alimentação retirando-a das pernas do Quadripé. Devido ao peso, deve ser desmontada por dois militares.
3.4.3.13 Desmontar o Quadripé.
Travar o Telescópio, já retraído, por meio das alavancas de fixação. Em seguida, retirar as estacas do terreno e guardá-las. Virar o Quadripé voltando a Base do Pedestal para baixo, e retrair as pernas. Caso haja acúmulo de detritos nas Sapatas, tipo terra e areia, remover o excesso e recolhê-las, girando até encostar na perna, guardando as alavancas dentro dos parafusos sem fim.
3.4.3.14 Conferir o material.
Estando todos os módulos acondicionados nas suas respectivas caixas, antes da saída da posição, deve-se conferir todo material utilizando a lista de verificação existente no interior de cada caixa.

INTENCIONALMENTE EM BRANCO

EB60-MT-23.401
4-1
CAPÍTULO IV APLICATIVO OPERACIONAL DA UNIDADE DE VISUALIZAÇÃO
4.1 CONCEITOS BÁSICOS
4.1.1 O Aplicativo Operacional do Radar SABER M60 (Sensor de Acompanhamento de alvos aéreos Baseado em Emissão de Radiofrequência) é o programa (software) especialmente produzido para a operação da Unidade de Visualização (UV) do Operador Radar (Op Radar) e do Oficial de Controle (Of Ct).
4.1.2 DIREITOS AUTORAIS
4.1.2.1 A estrutura do Aplicativo Operacional tem por propósito atender às necessidades da defesa antiaérea do país. Não há qualquer outro emprego à Unidade de Visualização do Radar SABER M60 que não a do Aplicativo Operacional.
4.1.2.2 O código-fonte do Aplicativo Operacional é de propriedade exclusiva do Exército Brasileiro, com base em plataforma livre ao usuário (Linux), sem necessidade de pagamento de direitos autorais a quaisquer empresas.
4.1.3 MANUTENÇÃO DO APLICATIVO OPERACIONAL
4.1.3.1. A manutenção preventiva do Aplicativo Operacional do Radar SABER M60 é de responsabilidade dos 1º e 2º Escalões. Nestes níveis, não são autorizadas modificações no Aplicativo Operacional. Ao usuário de 1º escalão cabe a observação de problemas, devendo informá-los ao 2º Escalão. O 1º Escalão pode sugerir modificações no Aplicativo Operacional, por intermédio da cadeia de comando. O 2º Escalão analisa o problema, caracterizando-o, para informar aos 3º e 4º Escalões.
4.1.3.2 As atividades de manutenção corretiva do Aplicativo Operacional do Radar SABER M60 cabem aos 3º e 4º Escalões de Manutenção. Mudanças do Aplicativo Operacional do Radar SABER M60 podem ser feitas sempre que novas funcionalidades forem julgadas necessárias, pois os dados de controle e alcance (Alc) são “parametrizados”, ou seja, de fácil modificação, possibilitando sua adaptação a novos parâmetros de troca de dados com centros de controle e sistemas de armas de quaisquer tipos. Devem ser realizadas apenas pelos 3º e/ou 4º Escalões de Manutenção.
4.1 CONCEITOS BÁSICOS 4.2 INICIALIZAÇÃO E AUTENTICAÇÃO DO SISTEMA 4.3 MODO OPERAÇÃO

EB60-MT-23.401
4-2
4.2 INICIALIZAÇÃO E AUTENTICAÇÃO DO SISTEMA
4.2.1 INICIALIZAÇÃO DO SISTEMA
4.2.1.1 A Unidade de Visualização (UV) é inicializada através do ícone “UV-M60” localizado na área de trabalho. Após clicar sobre o ícone, é apresentada a tela “Determinar Perfil”. De acordo com o nível de permissões do usuário no sistema de defesa antiaérea, o Radar SABER M60 possui quatro perfis operacionais:
a) Op Radar: permite o acesso apenas de usuário Op Radar. Possui apenasfuncionalidades de controle do Radar;
b) Op Radar & COAAe S: permite o acesso de usuário Op Radar afuncionalidades de controle do Radar e de usuário Of Ct a todas as funcionalidades de Op Radar e de COAAe S; e
d) COAAe P: permite o acesso de usuário Of Ct para visualizar dados de alvos deoutras unidades de COAAe S.
Fig 4-1 Determinar perfil
4.2.1.2 Após definir o perfil operacional, deve ser realizada a autenticação do usuário no sistema de defesa antiaérea, de acordo com três níveis de acesso:
a) Op Radar: é o responsável por manter o Radar em operação, a despeito dequaisquer intervenções que possam causar pane ou disfunção, sejam oriundas de incidentes e/ou acidentes no próprio equipamento, ou mesmo pela atuação de agentes eletromagnéticos adversos. Possui acesso às funcionalidades de conectar o Aplicativo ao Radar, ligar, alterar velocidade, configurar setores de bloqueio, consultar informações do BIT, alterar data e hora e visualizar alvos. Possui acesso aos perfis Op Radar e Op Radar & COAAe S;
b) Of Ct: é o encarregado das atividades de integração sistêmica do Radar SABERM60, pois controla e coordena o emprego das unidades de tiro ligadas ao seu Centro de Operações Antiaéreas (COAAe), além de receber e transmitir as informações de coordenação e controle com os outros centros ligados ao seu COAAe, sejam superiores ou subordinados. Possui acesso aos perfis Op Radar & COAAe S, COAAe S e COAAe P; e
c) Of Mnt: usuário dos 3º e/ou 4º Escalões de Manutenção. É o responsável pelamanutenção do sistema Radar SABER e tem acesso a todas as funcionalidades

EB60-MT-23.401
4-3
referentes ao Op Radar e ao Of Ct, além do acesso a funcionalidades específicas de manutenção, como cadastro de usuários, configurações de rede, configurações de
sistema e alteração de máscara de data e hora. Fig 4-2 Autenticação do usuário
4.2.1.3 Caso a senha ou o usuário sejam digitados com dados incorretos, o sistema apresenta uma mensagem de erro.
Fig 4-3 Usuário inválido
4.2.1.4 Para criar um novo usuário e sua respectiva senha, é necessária a intervenção da manutenção de 3º Escalão.
4.2.2 SELEÇÃO DA OPERAÇÃO
O sistema permite ao usuário as seguintes opções para a seleção da operação:
a) Desligar: para desligar o computador;
b) Cancelar: para voltar à tela anterior;

EB60-MT-23.401
4-4
c) Trocar Op: para selecionar outra Op previamente cadastrada no sistema, ouimportar uma Op previamente exportada;
d) Encerrar Op: para encerrar a Op selecionada. Como o Aplicativo necessitadessa informação, é apresentado ao usuário a tela para criar nova Op com um novo código gerado automaticamente. É possível adicionar à nova operação as informações de outra operação previamente cadastrada no sistema ou importar os dados de uma operação que tenha sido exportada para arquivo; e
e) Confirmar: para manter a Op selecionada.
Fig 4-4 Determinar operação militar
4.2.3 PROCEDIMENTO DE SEGURANÇA
4.2.3.1 O Memento de Segurança permite verificar se as atividades de montagem do Radar foram executadas com observância dos procedimentos de segurança, e o usuário do Aplicativo deve certificar se o radar foi montado corretamente.
4.2.3.2 Para passar à etapa seguinte, o usuário deve selecionar a opção Confirmar. O Aplicativo contém o Memento de Segurança para consulta.
4.2.3.3 Se o usuário escolher a opção Cancelar, o sistema volta para a tela anterior.
Fig 4-5 Procedimentos de segurança
4.2.3.4 Se o usuário escolher a opção Desligar, o computador será desligado.
4.2.4 TELA DE MENU
A tela de menu apresenta as opções de Operação e Avaliação do Operador, além de possibilitar o desligamento do computador .

EB60-MT-23.401
4-5
Fig 4-6 Tela de menu
a) Operação: inicia o funcionamento do Radar SABER M60. Apresenta interface devisualização dos alvos (PPI) e todas as funcionalidades referentes à operação do Radar SABER M60.
b) Avaliação (Fig 4-7): permite ao Of Ct realizar avaliação de operadores do radar.O sistema preenche automaticamente o nome do avaliador e a data e hora da avaliação. Os campos Evento Observado, Ação do Operador, Análise do Avaliador, Procedimento Correto e a Menção (E, MB, B, R ou I) devem ser preenchidos pelo avaliador. Cada campo possui o limite de 255 (duzentos e cinquenta e cinco) caracteres.
Fig 4-7 Avaliação do operador

EB60-MT-23.401
4-6
c) Ajustar GDH (Fig 4-8): permite ao operador ajustar a data e o horário nainicialização do sistema UV. Os dados são importados automaticamente do sistema operacional. O Aplicativo Operacional permite alterar as informações de data e hora também após a inicialização do sistema, e a referência de horário a ser empregada tais como Z (ZULU) e P (PAPA).
Fig 4-8 Ajustar GDH na inicialização
4.3 MODO OPERAÇÃO
Nesta seção, são apresentadas as funcionalidades agrupadas por componentes da interface presentes no Aplicativo Operacional do Radar SABER M60, tais como barra de menus, barra de ferramentas, tabelas, BIT, mensagens de alerta, caixa de controle dos radares, barra de status, menu de contexto e PPI.
4.3.1 BARRA DE MENUS
4.3.1.1 Menu Sessão
a) Trocar Usuário: permite alterar o perfil do Aplicativo Operacional e o usuárioque está autenticado.
b) Avaliação: permite ao Of Ct avaliar o desempenho de usuários Op Radar.
c) Menu Principal: permite abrir a tela de menu, que contém as opções Operação,Avaliação e Desligar.
d) Desligar: permite reiniciar ou desligar o sistema UV e o sistema operacional, ereiniciar ou desligar o Radar SABER M60.

EB60-MT-23.401
4-7
Fig 4-9 Desligar
4.3.1.2 Menu Operação
a) Mapa: permite adicionar um novo mapa no sistema. Para isso, o usuário devefornecer o diretório correspondente do mapa e as coordenadas dos cantos superior esquerdo e inferior direito. Após salvar a inserção, deve selecionar o mapa na lista de mapas cadastrados para determiná-lo para a operação. O nome do arquivo do mapa não pode conter caracteres especiais como símbolos, acentos, cedilhas, espaços etc.
Fig 4-10 Inserção e determinação de mapa

EB60-MT-23.401
4-8
b) Op Mil: permite criar uma nova operação militar, exportar a operação em uso,importar uma operação que tenha sido exportada anteriormente ou encerrar uma operação que não seja a operação em uso, ou seja, que não tenha sido selecionada durante a inicialização do sistema na tela 'Determinar Operação Militar'.
Fig 4-11 Manter Operação Militar
- Para criar uma nova operação, deve-se clicar no botão 'Nova' e preencher as informações solicitadas: “Nome Op” e “Descrição”. Ao confirmar a nova operação, o sistema cria uma operação vazia.
Fig 4-12 Nova Operação Militar
- O Aplicativo permite criar uma nova operação com base em uma operação já existente por meio de duas formas:

EB60-MT-23.401
4-9
1) Selecionando uma operação cadastrada no sistema: deve-se clicar no botão'Selecionar Op'. Na tela seguinte, deve-se selecionar a operação desejada e os itens a serem copiados.
Fig 4-13 Selecionar operação
2) Importando uma operação que tenha sido previamente exportada: deve-seclicar no botão 'Importar Op'. Deve-se selecionar a operação desejada e os itens a serem copiados.
c) Memento (Fig 4-14): permite editar os procedimentos de segurança a seremexecutados antes de iniciar a operação.
d) MCCEA: permite inserir no Aplicativo os elementos de Medidas de Coordenaçãoe Controle do Espaço Aéreo. Alguns elementos possuem campos de coordenadas referentes à sua posição. Para facilitar o preenchimento da coordenada geográfica, pode-se pressionar a tecla SHIFT ou CTRL ou ALT e mover o cursor sobre a PPI. O Aplicativo apresenta na barra de status a coordenada referente ao posicionamento do cursor. Outra forma mais simples é utilizar o menu de contexto sobre a posição desejada na PPI. O sistema preenche automaticamente as coordenadas referentes à posição escolhida. Seguem abaixo as opções dentro do menu MCCEA:

EB60-MT-23.401
4-10
Fig 4-14 Editar memento
- Aba “Cor Seg” (Fig 4-15): o padrão de dados de Corredores de Segurança está definido no C 44-1 – EMPREGO DA ARTILHARIA ANTIAÉREA (4ª Ed. 2001). O limite de Corredores de Segurança a serem inseridos é 23, representados na PPI na cor azul (retângulo) e identificados automaticamente pelo Aplicativo em ordem alfabética;
- Aba “P Sen” (Fig 4-16): permite a inserção de Pontos Sensíveis (P Sen) sobre a tela PPI. Não há restrição quanto à quantidade de P Sen a serem inseridos. Cada P Sen é numerado automaticamente pelo Aplicativo;
- Aba “P Vig” (Fig 4-17): permite a inserção de Postos de Vigilância (P Vig) sobre a tela PPI. Não há restrição quanto à quantidade de P Vig a serem inseridos. Deve ser preenchido o ângulo e alcance de vigilância para que o setor de observação seja representado pelo Aplicativo na PPI com setor angular de cor verde;

EB60-MT-23.401
4-11
Fig 4-15 – Inserir Cor Seg Fig 4-16 – Inserir P Sen
Fig 4-17 Inserir P Vig
EB60-MT-23.401
4-12
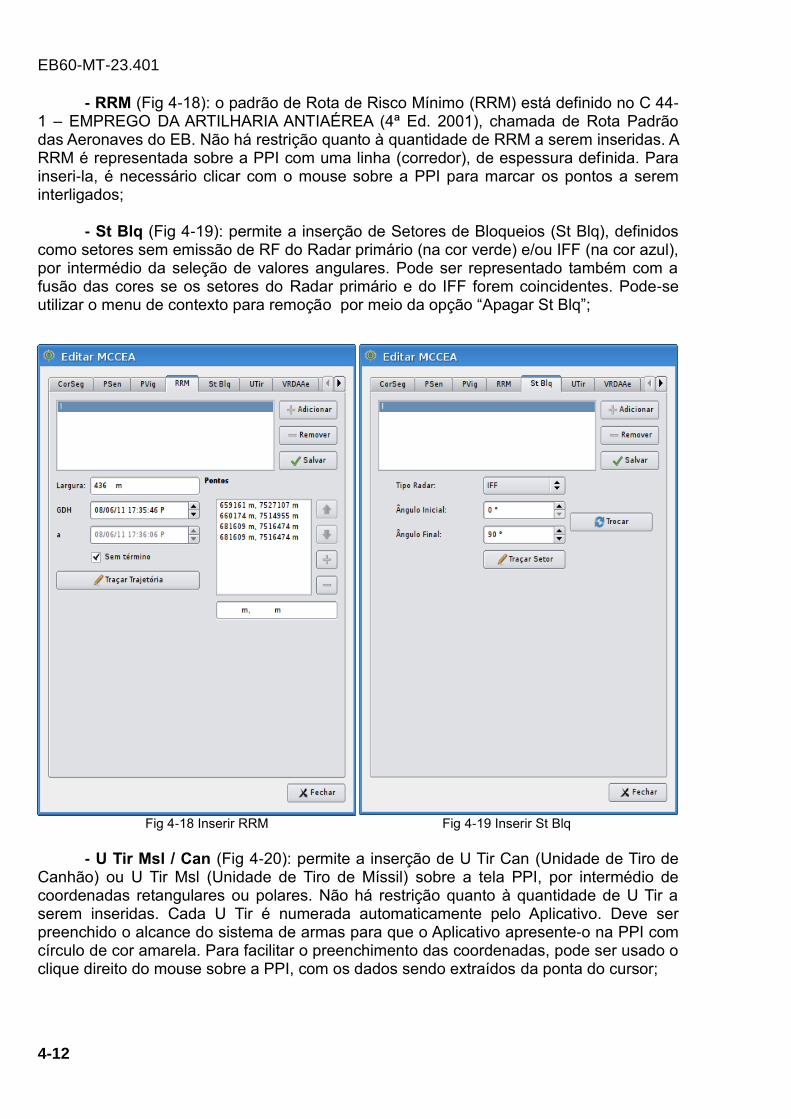
- RRM (Fig 4-18): o padrão de Rota de Risco Mínimo (RRM) está definido no C 44-1 – EMPREGO DA ARTILHARIA ANTIAÉREA (4ª Ed. 2001), chamada de Rota Padrão das Aeronaves do EB. Não há restrição quanto à quantidade de RRM a serem inseridas. A RRM é representada sobre a PPI com uma linha (corredor), de espessura definida. Para inseri-la, é necessário clicar com o mouse sobre a PPI para marcar os pontos a serem interligados;
- St Blq (Fig 4-19): permite a inserção de Setores de Bloqueios (St Blq), definidos como setores sem emissão de RF do Radar primário (na cor verde) e/ou IFF (na cor azul), por intermédio da seleção de valores angulares. Pode ser representado também com a fusão das cores se os setores do Radar primário e do IFF forem coincidentes. Pode-se utilizar o menu de contexto para remoção por meio da opção “Apagar St Blq”;
Fig 4-18 Inserir RRM Fig 4-19 Inserir St Blq
- U Tir Msl / Can (Fig 4-20): permite a inserção de U Tir Can (Unidade de Tiro de Canhão) ou U Tir Msl (Unidade de Tiro de Míssil) sobre a tela PPI, por intermédio de coordenadas retangulares ou polares. Não há restrição quanto à quantidade de U Tir a serem inseridas. Cada U Tir é numerada automaticamente pelo Aplicativo. Deve ser preenchido o alcance do sistema de armas para que o Aplicativo apresente-o na PPI com círculo de cor amarela. Para facilitar o preenchimento das coordenadas, pode ser usado o clique direito do mouse sobre a PPI, com os dados sendo extraídos da ponta do cursor;

EB60-MT-23.401
4-13
- VRDAAe (Fig 4-21): o padrão de dados de Volume de Responsabilidade de Defesa Antiaérea (VRDAAe) está definido no C 44-1 – EMPREGO DA ARTILHARIA ANTIAÉREA (4ª Ed. 2001). Não há restrição quanto à quantidade de VRDAAe a serem inseridos. O VRDAAe é representado na PPI com as cores vermelha (para Sobrevoo Proibido), amarela (para Sobrevoo Restrito) e verde (para Sobrevoo Livre), nos formatos cilíndrico, onde são inseridas as coordenadas do ponto central, ou quadrilátero, onde são inseridas as 4 (quatro) coordenadas dos vértices do mesmo;
Fig 4-20 Inserir U Tir Msl Fig 4-21 Inserir VRDAAe
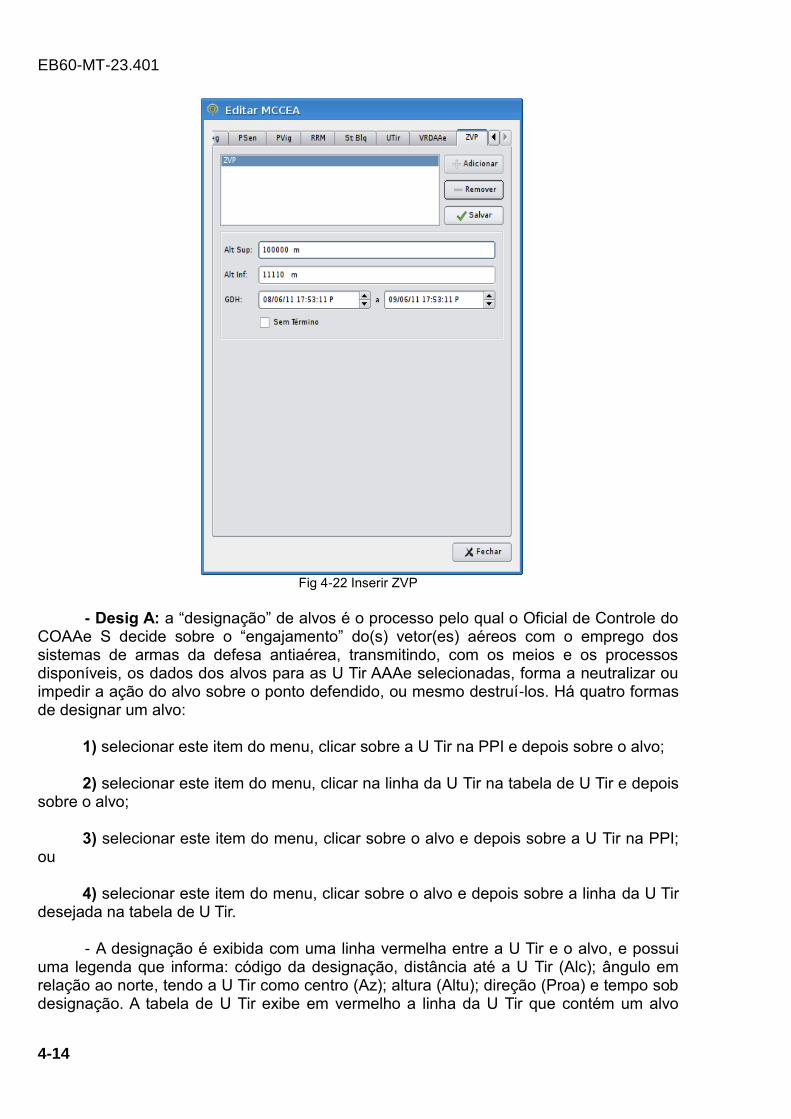
- ZVP (Fig 4-22): o padrão de dados de Zona de Voo Proibido (ZVP) está definido no Manual C 44-1 – EMPREGO DA ARTILHARIA ANTIAÉREA (4ª Ed. 2001). Pode-se inserir apenas uma ZVP no sistema representada à direita da PPI. Para inserir, é necessário fornecer os dados de altura superior e inferior e período de vigência da ZVP. Este elemento pode ser excluído por meio do menu de contexto;
- Alvo Simulado: permite a inserção de alvos não detectados pelo Radar. O alvo simulado é apresentado por um triângulo isósceles, onde a direção da proa é indicada pelo vértice do menor ângulo interno do triângulo;
EB60-MT-23.401
4-14
Fig 4-22 Inserir ZVP
- Desig A: a “designação” de alvos é o processo pelo qual o Oficial de Controle do COAAe S decide sobre o “engajamento” do(s) vetor(es) aéreos com o emprego dos sistemas de armas da defesa antiaérea, transmitindo, com os meios e os processos disponíveis, os dados dos alvos para as U Tir AAAe selecionadas, forma a neutralizar ou impedir a ação do alvo sobre o ponto defendido, ou mesmo destruí-los. Há quatro formas de designar um alvo:
1) selecionar este item do menu, clicar sobre a U Tir na PPI e depois sobre o alvo;
2) selecionar este item do menu, clicar na linha da U Tir na tabela de U Tir e depoissobre o alvo;
3) selecionar este item do menu, clicar sobre o alvo e depois sobre a U Tir na PPI;ou
4) selecionar este item do menu, clicar sobre o alvo e depois sobre a linha da U Tirdesejada na tabela de U Tir.
- A designação é exibida com uma linha vermelha entre a U Tir e o alvo, e possui uma legenda que informa: código da designação, distância até a U Tir (Alc); ângulo em relação ao norte, tendo a U Tir como centro (Az); altura (Altu); direção (Proa) e tempo sob designação. A tabela de U Tir exibe em vermelho a linha da U Tir que contém um alvo

EB60-MT-23.401
4-15
designado. Com o clique direito do mouse, é possível remover a designação e liberar a U Tir.
- St Blq: este recurso é um atalho para a tela de inserir St Blq;
- Exibir Traj: permite exibir ou ocultar a trajetória de todos os alvos detectados pelo Radar SABER; e
- Alr e Cndc Apr: permite determinar o estado de alerta do sistema de defesa antiaéreo e as condições de aprestamento dos sistemas de armas alocados a determinada defesa.
- O Estado de Alerta (Alr Vm, Am e Brnc) e as Cndc Apr seguem o padrão de definido no C 44-1 – EMPREGO DA ARTILHARIA ANTIAÉREA (4ª Ed. 2001). Ao alterar o Estado de Ação e a Condição de Aprestamento, as alterações refletem nos campos apropriados, na parte superior direita do Aplicativo e no sistema de visualização das U Tir conectadas. No caso do Alerta Vm, esses sistemas passam a emitir um alerta sonoro.
Fig 4-23 – Alerta e condições de aprestamento
4.3.1.3 Menu Radar
a) Conexão (Fig 4-24): permite conectar o sistema UV às unidades que estãocadastradas e associadas à Op atual. Para realizar a conexão, a unidade desejada deve estar previamente cadastrada no sistema com o IP ou a porta correspondente. As unidades conectáveis são Unidades de Controle (Radar) ou Unidade de Visualização.

EB60-MT-23.401
4-16
Fig 4-24 Conexão
- Ao realizar a conexão com o Radar, o sistema apresenta a tela “Ajustar Radar” (Fig 4-25), onde devem ser preenchidos os dados necessários para a sua montagem, tais como:
Fig 4-25 Ajustar radar 1) Angulação - IFF: deve ser registrado o ângulo de inclinação do IFF, que varia de 5º a 27º, com valor de referência inicial de 17º, baseado em observação do valor do ângulo da antena do primário. - Ant: registrar o ângulo de inclinação da antena do Radar primário, de acordo com a avaliação do terreno em relação à Posição Radar escolhida, feita no Estudo de Situação, que culmina com o Reconhecimento, Escolha e Ocupação da Posição Radar. O ângulo da antena do Radar primário pode variar de -2° a 10°, com valor padrão de referência inicial de 7º.

EB60-MT-23.401
4-17
- QM: ângulo entre o norte de quadrícula e o magnético.
2) Pos Radar
- Pos relativa ao Norte Magnético: este campo não deve ser preenchido manualmente, pois é preenchido automaticamente ao clicar no botão “Bússola Eletrônica”, se estiver habilitado. Este campo fica desabilitado quando o sistema não possui uma bússola instalada ou quando os dados dela estão imprecisos. O valor apresentado deve ser preenchido no campo Ang QM.
- Pos Radar: inserir as coordenadas E, N e H do ponto estação do radar, no sistema Universal Transversal de Mercator (UTM) (Coor métricas), referenciando a Z UTM (informação contida no canto superior direito das cartas, com dois números, sem espaçamento) e o Hemisfério (Hemis N ou S). Como exemplo de inserção da Z UTM, verifique o canto superior direito de Carta da Região Sul do Brasil, para o qual deve se inserida a Z UTM 22 (Fig 4-26). Também pode-se inserir por coordenadas geográficas (GEO) em graus, minutos e segundos com uma casa decimal.
Fig 4-26 Canto superior direito de uma carta na escala 1:25000 (Coor UTM)
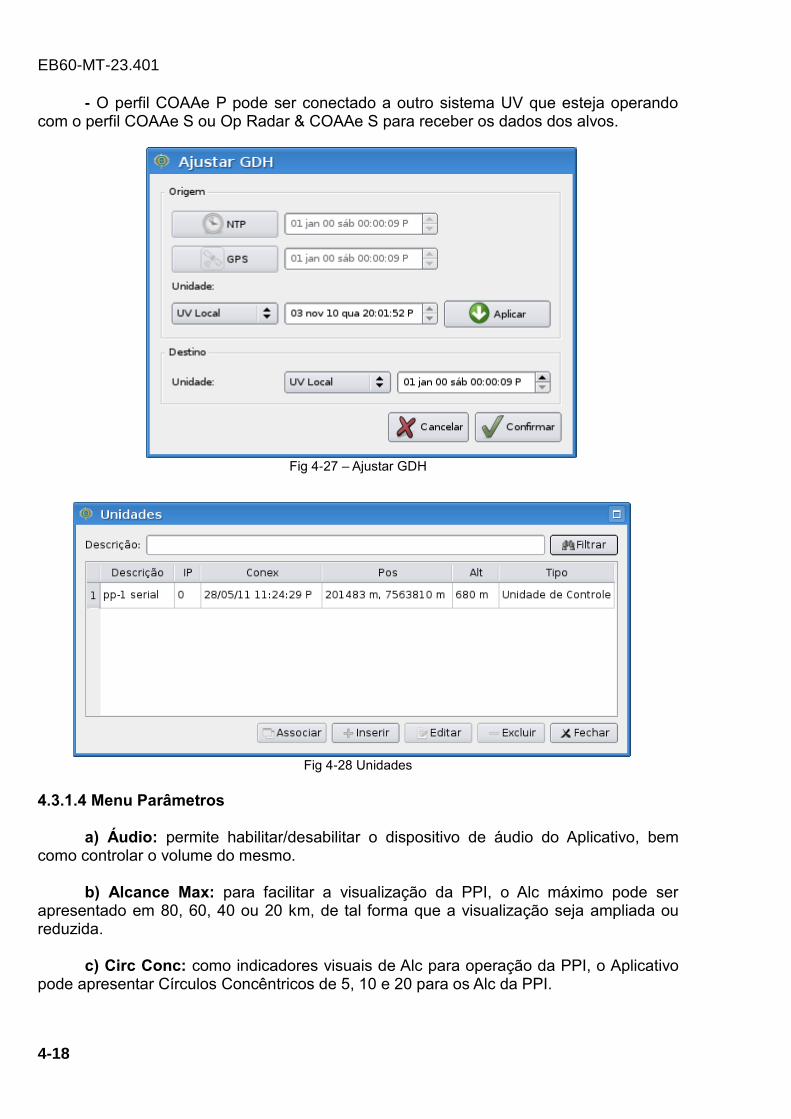
b) Ajustar GDH (Fig 4-27): permite consultar ou alterar a data e hora do próprioAplicativo ou do Radar.
c) Ajustar Info Montagem: caso o Radar esteja conectado e emitindo, essafuncionalidade permite consultar as informações de montagem. Caso o Radar esteja conectado e não esteja emitindo, essa funcionalidade permite editar os dados de montagem.
d) Unidades (Fig 4-28): permite cadastrar no sistema as Unidades a seremconectadas ao sistema UV.
- Os perfis Op Radar e Op Radar & COAAe S podem ser conectados apenas ao Radar SABER M60.
- O perfil COAAe S pode ser conectado a outro sistema UV que esteja operando com o perfil Op Radar para receber os dados dos alvos.
EB60-MT-23.401
4-18
- O perfil COAAe P pode ser conectado a outro sistema UV que esteja operando com o perfil COAAe S ou Op Radar & COAAe S para receber os dados dos alvos.
Fig 4-27 – Ajustar GDH
Fig 4-28 Unidades
4.3.1.4 Menu Parâmetros
a) Áudio: permite habilitar/desabilitar o dispositivo de áudio do Aplicativo, bemcomo controlar o volume do mesmo.
b) Alcance Max: para facilitar a visualização da PPI, o Alc máximo pode serapresentado em 80, 60, 40 ou 20 km, de tal forma que a visualização seja ampliada ou reduzida.
c) Circ Conc: como indicadores visuais de Alc para operação da PPI, o Aplicativopode apresentar Círculos Concêntricos de 5, 10 e 20 para os Alc da PPI.

EB60-MT-23.401
4-19
d) Unidades de Medida
Fig 4-29 Unidades de Medida
- Alcance – opções: quilômetros (km), metros (m) e milhas náuticas (NM).
- Azimute – opções: graus (°) e milésimos ('''), este apresentado sempre com quatro algarismos, mesmo que não significativos (0035''', por exemplo). A referência para orientação do Radar é o Norte Magnético.
- Altura – opções: metros (m) e pés (ft).
- Velocidade – opções: metros por segundo (m/s); quilômetros por hora (km/h), nós e milhas por hora.
- Proa – opções: graus (°) e milésimos (''''), este apresentado sempre com quatro algarismos, mesmo que não significativos (0035'''', por exemplo).
- Coordenadas – opções: coordenadas retangulares, pelo Sistema de Projeção Universal Transversa de Mercator (UTM) métrica, decamétrica e quilométrica; e coordenadas geográficas (GEO).
- Datum – referência para conversão de coordenadas UTM para geográficas e vice-versa. Apresenta as opções WGS84, SAD69 e Córrego Alegre.

EB60-MT-23.401
4-20
Fig 4-30 Formatação do Datum SAD 69
- Data – opções: dd/MM/yy (dia, mês e ano) ou dd MM yy ddd (dia, mês, ano e semana).
- Horário – de acordo com a operação e/ou estação do ano e/ou horário local, podem ser escolhidos ZULU (Z) ou PAPA (P).
4.3.1.5 Menu Manter Mensagem
a) O Aplicativo Operacional armazena as mensagens recebidas e transmitidas,apresentando seu GDH (transmissão/recepção), destinatário/remetente (de/para) e seu conteúdo de até 195 (cento e noventa e cinco) caracteres.
Fig 4-31 Manter Mensagem
c) O Aplicativo permite enviar mensagens para todas as U Tir conectadas, paratodas as unidades COAAe Subordinados e Principal conectadas ou para unidades selecionadas.

EB60-MT-23.401
4-21
Fig 4-32 Envio de Mensagens
4.3.1.6 Menu Manutenção
a) As funcionalidades desse item do menu são de responsabilidade do Oficial de Manutenção (Of Mnt) de 3º Escalão.
b) Usuários (Fig 4-33): permite ao usuário Of Mnt adicionar novos usuários ao sistema. Os tipos de usuário são: Operador de Radar, Oficial de Controle e Oficial de Manutenção.
c) UV: permite consultar o Log do sistema UV, realizar configurações das variáveis parametrizadas do sistema, atualizar o software do sistema ou consultar alterações de binários.
d) Rede (Fig 4-34): permite definir as configurações de rede do sistema Radar SABER M60. Essas configurações são específicas para cada operação. Se as mesmas não forem definidas, assumirão os valores da configuração padrão do sistema.

EB60-MT-23.401
4-22
Fig 4-33 Inserir usuário
Fig 4-34 Configurações de rede
4.3.1.7 Menu Ajuda
a) Ajuda do SABER M60: fornece informações de utilização do Aplicativo. O botãoF1 do teclado pode ser acionado como atalho para essa função.
b) Sobre: apresenta o número de versão do sistema.
4.3.2 BARRA DE FERRAMENTAS
A barra de ferramentas localizada do lado direito da interface do sistema apresenta opções de atalhos para as funcionalidades de Designação de Alvos, Setor de Bloqueio, U Tir Míssil, Posto de Vigilância, Ponto Sensível, U Tir Canhão e Alertas Vermelho, Amarelo e Branco.

EB60-MT-23.401
4-23
4.3.3 TABELA 4.3.3.1 Lista de alvos: a Lista de alvos apresenta-os ordenados por prioridade (grau de ameaça), com os seguintes dados: código da trajetória (Traj), código do IFF no modo 1 (2 dígitos de 0 a 7), código do IFF no modo 2 (4 dígitos de 0 a 7), código do IFF no modo 3/A (4 dígitos de 0 a 7), altitude do alvo recebida no modo C, com a mesma unidade de medida da altura calculada pelo radar primário (Altu); tipo do vetor (asa fixa ou rotativa); modelo das Anv de asas rotativas (Ident He), se identificado; azimute (Az), alcance (Alc), altura (Altu), velocidade (Vel) e proa.
Fig 4-35 Lista de alvos 4.3.3.2 Lista de Desig A: a Lista de Designação de Alvos apresenta os seguintes dados das designações: código da designação, nome da U Tir, tipo de alvo (“Avi” para Anv de asa fixa ou “He” para Anv de asa rotativa), avaliação (Amigo, Desconhecido, Inimigo), alcance, azimute, altura e proa do alvo com relação à U Tir, além do tempo de voo do alvo até a U Tir.
Fig 4-36 Lista de designação de alvos
4.3.3.3 Lista de U Tir: a Lista de U Tir é ordenada por número, com os dados de alcance (Alc), teto, munição, disponibilidade (Dispon), tipo (Msl ou Can), nome e coordenadas de sua localização (E, N e H).
Fig 4-37 Lista de U Tir
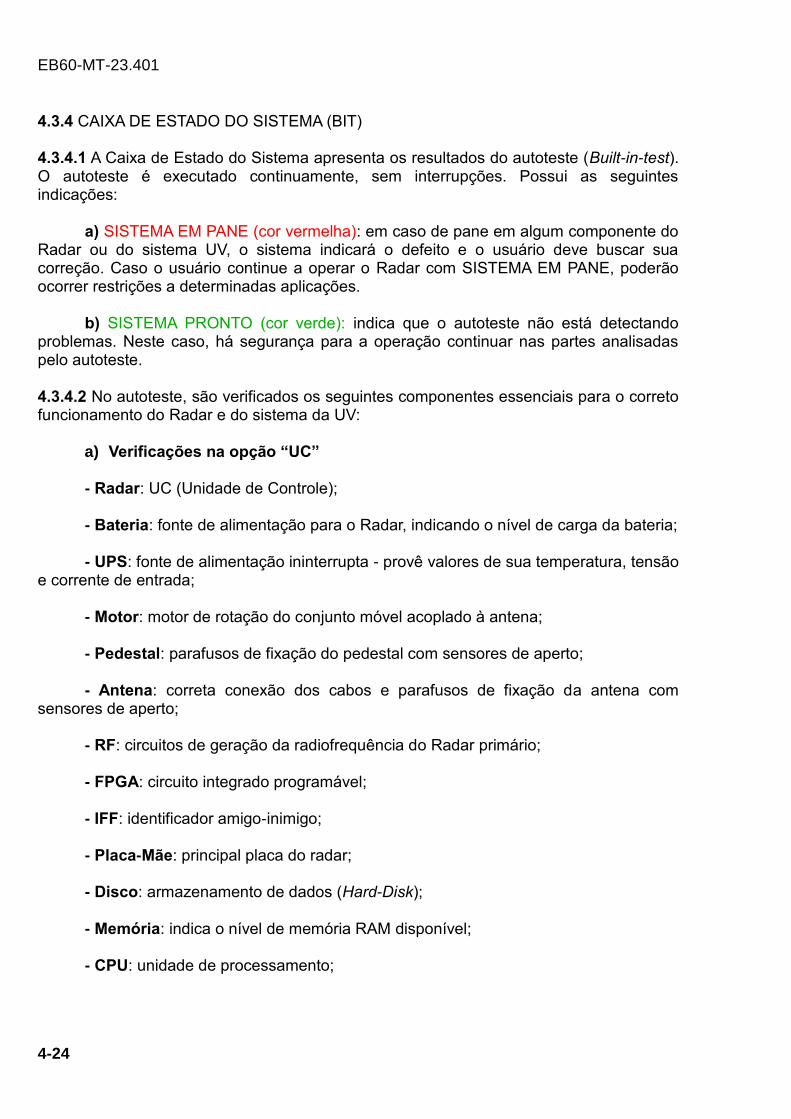
EB60-MT-23.401
4-24
4.3.4 CAIXA DE ESTADO DO SISTEMA (BIT)
4.3.4.1 A Caixa de Estado do Sistema apresenta os resultados do autoteste (Built-in-test). O autoteste é executado continuamente, sem interrupções. Possui as seguintes indicações:
a) SISTEMA EM PANE (cor vermelha): em caso de pane em algum componente doRadar ou do sistema UV, o sistema indicará o defeito e o usuário deve buscar sua correção. Caso o usuário continue a operar o Radar com SISTEMA EM PANE, poderão ocorrer restrições a determinadas aplicações.
b) SISTEMA PRONTO (cor verde): indica que o autoteste não está detectandoproblemas. Neste caso, há segurança para a operação continuar nas partes analisadas pelo autoteste.
4.3.4.2 No autoteste, são verificados os seguintes componentes essenciais para o correto funcionamento do Radar e do sistema da UV:
a) Verificações na opção “UC”
- Radar: UC (Unidade de Controle);
- Bateria: fonte de alimentação para o Radar, indicando o nível de carga da bateria;
- UPS: fonte de alimentação ininterrupta - provê valores de sua temperatura, tensão e corrente de entrada;
- Motor: motor de rotação do conjunto móvel acoplado à antena;
- Pedestal: parafusos de fixação do pedestal com sensores de aperto;
- Antena: correta conexão dos cabos e parafusos de fixação da antena com sensores de aperto;
- RF: circuitos de geração da radiofrequência do Radar primário;
- FPGA: circuito integrado programável;
- IFF: identificador amigo-inimigo;
- Placa-Mãe: principal placa do radar;
- Disco: armazenamento de dados (Hard-Disk);
- Memória: indica o nível de memória RAM disponível;
- CPU: unidade de processamento;
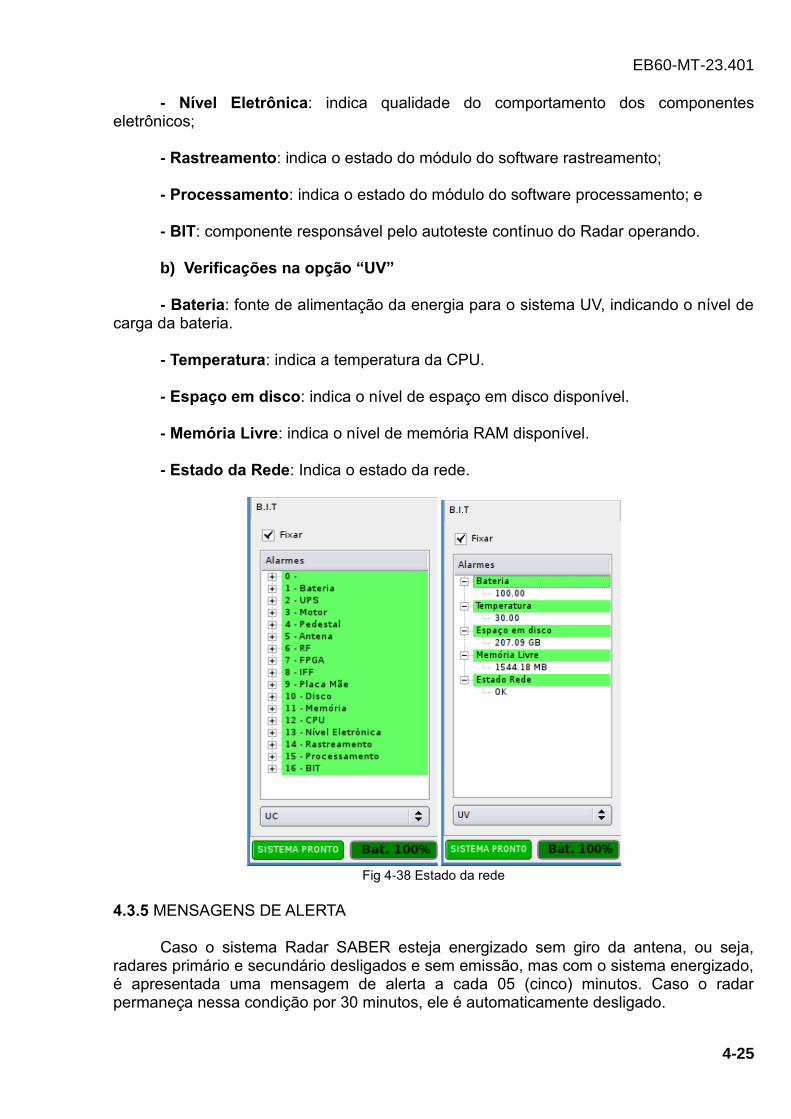
EB60-MT-23.401
4-25
- Nível Eletrônica: indica qualidade do comportamento dos componentes eletrônicos;
- Rastreamento: indica o estado do módulo do software rastreamento; - Processamento: indica o estado do módulo do software processamento; e - BIT: componente responsável pelo autoteste contínuo do Radar operando.
b) Verificações na opção “UV”
- Bateria: fonte de alimentação da energia para o sistema UV, indicando o nível de carga da bateria. - Temperatura: indica a temperatura da CPU. - Espaço em disco: indica o nível de espaço em disco disponível. - Memória Livre: indica o nível de memória RAM disponível. - Estado da Rede: Indica o estado da rede.
Fig 4-38 Estado da rede 4.3.5 MENSAGENS DE ALERTA Caso o sistema Radar SABER esteja energizado sem giro da antena, ou seja, radares primário e secundário desligados e sem emissão, mas com o sistema energizado, é apresentada uma mensagem de alerta a cada 05 (cinco) minutos. Caso o radar permaneça nessa condição por 30 minutos, ele é automaticamente desligado.

EB60-MT-23.401
4-26
Fig 4-39 Mensagem de alerta
4.3.6 CAIXA DE CONTROLE DOS RADARES
4.3.6.1 Para ligar os Radares principal e secundário, é necessário selecionar um canal de emissão do Radar e selecionar ao menos um dos modos de operação do IFF. Para desligar o Radar e o IFF, é necessário clicar sobre os ícones respectivos deixando-os na cor vermelha. Em nenhuma situação a antena do Radar fica girando sem emitir.
Fig 4-40 Caixa de controle do radar
4.3.6.2 Aba Radares
a) Radar Primário
- Canais: possibilita o controle das frequências do Radar primário e da Frequência de Repetição de Pulsos (FRP). Os canais livres são liberados para uso em tempo de paz. Para cada portadora, há um número predeterminado de FRP, com variação de uso exclusivo e configuração do Exército. Os canais restritos são exclusivos para operações reais, sendo seus usos controlados, liberados para autenticações somente do nível Of Ct.
- MAE (Medidas de Ataque Eletrônico): indicativo de contramedidas eletrônicas. Caso o sistema esteja sendo alvo de bloqueio ou despistamento, o sinal correspondente fica em vermelho. Se não há sinal captado que não seja do próprio Radar, permanece na cor verde.

EB60-MT-23.401
4-27
b) Radar Secundário - Modos: Permite a seleção dos Modos de Funcionamento do IFF. Há 4 modos: 1 e 2 identificam apenas aeronaves militares; modo 3A, que identifica aeronaves civis e militares; e modo C, que recebe a altura das aeronaves detectadas através do modo 3A (de forma que o modo 3A precisa estar selecionado). O Aplicativo distribui os modos em 3 grupos: 1) G1 – possui os modos 1 e 2. Alterna com o G2 os modos de emissão a cada volta da antena, ou seja, em uma volta, o radar emite nos modos selecionados no G1, e, na próxima volta, emite nos modos selecionados no G2; 2) G2 – possui os modos 3A e C. Alterna com o G1 os modos de emissão a cada volta da antena; e 3) G3 – possui os modos 1, 2, 3A e C. Permite selecionar até 3 modos para serem utilizados simultaneamente.
- Códigos de IFF: caso os códigos de IFF das aeronaves conhecidas estejam disponíveis, esta janela possibilita sua inserção no sistema. A inserção de Códigos do IFF (Fig 4-41) pode ser feita antes de iniciar a operação ou enquanto o Radar estiver em operação. Deve ser preenchido da seguinte forma: 1) Código: apresenta o formato XX.YYYY.ZZZZ, onde: XX – referente ao Modo 1: o valor do 1º dígito deve estar na faixa de 0 a 7 e o valor do 2º dígito deve estar na faixa de 0 a 7; caso o 1º dígito seja 7, o 2º dígito deve estar na faixa de 0 a 3. Exemplo: 22 YYYY – referente ao Modo 2: o valor de cada dígito deve estar na faixa de 0 a 7. Por exemplo: 3467 ZZZZ – referente ao Modo 3A: o valor de cada dígito deve estar na faixa de 0 a 7. Por exemplo: 5536 5) Mtcl Anv: indica a matrícula da Anv. Por exemplo, FAB 3422; 6) Mdl Anv: indica o modelo da Anv. Por exemplo: A1; 7) Indic Anv: é o nome código da Anv empregado pelas Normas Operacionais do Sistema de Defesa Aeroespacial Brasileiro (NOSDA), como por exemplo, CALANGO; 8) GDH In: início do período de vigência do código; 9) GDH Trm: término do período de vigência do código.
Fig 4-41 Modificar Códigos IFF

EB60-MT-23.401
4-28
Fig 4-42 Códigos de IFF
4.3.6.3 Aba Antena/Clutter/Chaff
a) Vel solicitada: controle de rotação da velocidade da antena, que pode ser de15 RPM ou 7,5 RPM.
b) Vel real: apresenta a velocidade real da rotação da antena.
c) CLUTTER: são objetos de grandes dimensões que causam perturbação nofuncionamento do radar primário, ocasionando a detecção de alvos indesejáveis, tais como acúmulo de nuvens.
d) O Aplicativo permite configurar o Radar para minimizar a detecção de alvosindesejados, por meio da configuração da velocidade mínima para detecção dos alvos.
e) O Radar SABER M60 possibilita o uso, por meio de configuração na Unidade deVisualização, das seguintes unidades de Medidas de Velocidade:
- km/h (quilômetros por hora); - m/s (metros por segundo); - Nós (nós).
f) A escolha dessa configuração afeta todos os parâmetros de Velocidadesutilizadas nos demais recursos da Unidade de Visualização, como: Clutter, Chaff, velocidades dos alvos mostrados na tabela de alvos, etc. O operador deve atentar para a escolha destas Unidades no momento da operação, pois afetam todas as informações exibidas em todos os recursos da UV. Exemplo: caso selecione-se a Unidade km/h no menu da Unidade de Visualização, a aba de configuração do Clutter/Chaff permitirá como mínimo o valor de 29 km/h. Se a Unidade for m/s, o mínimo será 8 m/s e, no último caso, se a Unidade configurada for Nós, o mínimo será de 16 nós.

EB60-MT-23.401
4-29
4.3.6.4 Cancelamento CHAFF: CHAFF são tiras metálicas de espessura extremamente fina lançada no ar em grande quantidade formando uma nuvem de partículas metalizadas. Essa nuvem faz com que o radar passe a não enxergar o alvo. O Aplicativo permite minimizar o efeito de CHAFF por meio da configuração da velocidade e do azimute do vento. O valor de CHAFF deve ser maior ou igual ao valor de CLUTTER. Se o valor for maior, então o valor de CHAFF é alterado automaticamente.
Fig 4-43 Caixa de controle do Radar – aba antena
4.3.7 BARRA DE STATUS É a área visual encontrada na região inferior da janela do Aplicativo que apresenta as seguintes informações: 4.3.7.1 Caixa de Estado do Sistema (BIT): apresenta os resultados do autoteste. 4.3.7.2 Ícone de alimentação: a presença do ícone indica a utilização de alimentação externa. 4.3.7.3 Pós Cursor: ao manter a tecla CTRL ou ALT ou SHIFT pressionada, indica as coordenadas (UTM ou GEO) da posição do cursor, caso este esteja sobre a PPI. 4.3.7.4 Data: apresenta a data atualizada do Aplicativo. 4.3.7.5 Horário: mostra o horário atualizado do Aplicativo, podendo ser ZULU (Z) ou PAPA (P).
EB60-MT-23.401
4-30
4.3.8 MENU DE CONTEXTO
4.3.8.1 Menu de contexto: botão direito
a) Sobre a PPI
- Dist Visual: permite afastar, aproximar ou centralizar a PPI.
- MCCEA: permite inserir Crdr Seg, P Sen, U Tir (Msl e Can), P Vig, St Blq, VRDAAe, RRM e ZVP, servindo como atalho para a opção Inserir da Barra de Menus.
- Inserir Alvo: este recurso é um atalho para a tela de “Inserir Alvo” da Barra de menus.
- Exibir trajetória: este recurso é um atalho para a tela de “Exibir Traj” da Barra de menus.
b) Sobre elementos presentes na PPI
- U Tir: possibilita designar alvos, além das opções disponíveis ao clicar sobre a PPI.
- St Blq: possibilita excluir o setor, além das opções disponíveis ao clicar sobre a PPI.
c) Sobre alvos: tornar amigo, inimigo ou desconhecido, além das opçõesdisponíveis ao clicar sobre a PPI.
4.3.8.2 Menu de contexto: botão esquerdo
a) Sobre a PPI: permite mover o mapa ao mover o cursor e ao pressionarsimultaneamente a tecla SHIFT ou CTRL ou ALT.
b) Sobre alvos: permite a visualização da etiqueta do alvo com as seguintesinformações:
- Primeira linha: 1) Código da trajetória: campo 'Traj' da tabela de alvos.2) Altura do alvo: campo 'Altu' da tabela de alvos. É a altura medida pelo Radar
primário. 3) Velocidade: campo 'Vel' da tabela de alvos.
- Segunda linha: apresentada quando o alvo apresenta informações de IFF. 1) Código: código de IFF correspondente ao modo selecionado.2) Modo: modo do IFF selecionado. Se mais de um modo estiver ativo, apenas um
é apresentado na etiqueta, da seguinte prioridade: Prio 1 - 02 dígitos do modo 1. Prio 2 - 04 dígitos do modo 2. Prio 3 - 04 dígitos do modo 3/A.

EB60-MT-23.401
4-31
4.3.9 PPI
Os alvos são representados de acordo com a classificação que o algoritmo de rastreamento do SABER M60 executa, separando-os em aeronaves de asas fixas e rotativas por meio de ícones diferenciados. Os alvos podem apresentar as seguintes cores:
4.3.9.1 Cor azul: alvos amigos – classificados manualmente por ação do usuário ou por possuir o código de IFF cadastrado no sistema;
4.3.9.2 Cor amarela: alvos desconhecidos – não classificados por ação do usuário e não possuem cadastro de IFF no sistema; e
4.3.9.3 Cor vermelha: alvos inimigos – classificados manualmente por ação do usuário.
4.3.9.4 Os alvos detectados pelos Radares primário e IFF aparecem da seguinte forma na PPI:
a) Primário: alvo possui o símbolo “. (ponto)” no canto inferior direito;
b) IFF: alvo envolto por um círculo; e
c) Associado (Primário+IFF): possui os dois símbolos indicando que o alvo foidetectado pelos dois radares.
Fig 4-44 Cenário da PPI

INTENCIONALMENTE EM BRANCO

EB60-MT-23.401
5-1
CAPÍTULO V ACONDICIONAMENTO E TRANSPORTE
5.1 ACONDICIONAMENTO
5.1.1 FINALIDADE
O acondicionamento correto do material, principalmente dos componentes eletrônicos do Radar, evita que a sua vida útil seja reduzida, pois reduz os efeitos do choque mecânico, da vibração, do trepidar e da ação da umidade sobre os componentes.
5.1.2 COMPOSIÇÃO
5.1.2.1 Por apresentar construção modular, o Radar SABER M60 foi projetado de forma que módulos fossem guardados em caixas distintas, visando facilitar o transporte e o manuseio do material. Para isso, os módulos do Radar foram divididos em 06 (seis) caixas, que fornecem a devida proteção quando do transporte em viaturas, aeronaves e outros meios, a citar: a) A Caixa Nr 01 acondiciona a Antena do Radar, o Módulo de Controle e RF e asSapatas; b) A Caixa Nr 02 acondiciona o Quadripé e os Cabos Externos;c) A Caixa Nr 03 acondiciona o Pedestal;d) A Caixa Nr 04 acondiciona a Fonte de Alimentação e a Caixa de Baterias;e) A Caixa Nr 05 acondiciona o S60 (IFF), a Luneta e a UV;f) A Caixa Nr 06 acondiciona as cintas de unitização, extensões de rede elétrica AC e oscabos adaptadores; g) Também acompanham o Radar SABER M60:- sacola com rede para helitransporte e cinta de içamento; - maleta de ferramentas para 1º Escalão; - maleta de ferramenta para 2º Escalão; - cones de sinalização.
5.1.2.2 O Gerador externo e a Bobina do cabo M60_W5 são protegidos por capas (item opcional), devendo ser conduzidos por suas alças; e as capas devem ser removidas durante a operação. O equipamento rádio possui mochila própria (item opcional).
5.1 ACONDICIONAMENTO 5.2 TRANSPORTE

EB60-MT-23.401
5-2
Fig 5-1 Disposição do material
5.1.2.3 As Caixas do Radar SABER M60 foram elaboradas de modo que elas formem um módulo que ocupe o menor espaço possível e facilite o acondicionamento e o transporte. O conjunto de caixas fica preso por, no mínimo, quatro cintas de unitização, formando, assim, um só conjunto. Esse conjunto é preso por duas cintas adicionais para fixação ao piso ou parede lateral da viatura, quando é transportado por meio terrestre. Esta fixação com cintas de unitização visa reduzir o dano ao radar e às suas caixas de transporte, que sofrem choque mecânico e vibração mecânica durante o transporte.
5.1.2.4 A Caixa Nr 01 deve ser posicionada embaixo das demais, pois devido ao seu volume, servirá como base para o módulo. Quando não estiverem em uso, as caixas devem ficar fechadas. Os materiais devem ser mantidos e guardados limpos.
5.1.3 USO DAS CINTAS DE UNITIZAÇÃO
5.1.3.1 Etapas para utilização das cintas de unitização com suas respectivas catracas
a) Posiciona-se a catraca sobre as caixas do Radar, com a alça na posição horizontal,conforme foto a seguir.

EB60-MT-23.401
5-3
Fig 5-2 Cinta
b) Envolve-se o conjunto de caixas com a fita, tomando-se o cuidado de não torcê-la, e passa-se a ponta da fita por baixo da peça circular central da catraca.
Fig 5-3 Envolvimento com a cinta
c) A ponta da fita será passada através da abertura na peça circular central da catraca.
Fig 5-4 Fechamento da cinta

EB60-MT-23.401
5-4
d) Estica-se a fita, diminuindo a folga em torno das caixas.
Fig 5-5 Ajuste da cinta
e) Pressiona-se a trava da catraca, e movimenta-se a alça até obter máxima pressão no envolvimento das caixas.
Fig 5-6 Travamento da cinta

EB60-MT-23.401
5-5
f) Por fim, posiciona-se a alça na posição horizontal, conforme a foto a seguir.
Fig 5-7 Cinta travada
5.2 TRANSPORTE
5.2.1 FINALIDADE
O transporte existe para o deslocamento do material, de um ponto a outro, dentro das operações ou em situação administrativa. A construção modular do Radar SABER M60 foi a solução encontrada para diminuir o tempo do Reconhecimento, Escolha e Ocupação de Posição (REOP), facilitando as operações de movimento.
5.2.2 TIPOS DE TRANSPORTE
O sistema pode ser transportado por qualquer meio, seja ele aéreo, terrestre ou marítimo. Durante o transporte, particularmente para o terrestre, as caixas devem estar empilhadas conforme figura 5.1 – Disposição do Material e fixadas por meio de cintas de unitização que acompanham o sistema.
5.2.2.1 Transporte Terrestre – Pode ser realizado em qualquer viatura maior que 1 t, com carroceria estendida ou em vagão ferroviário, de modo que caibam todas as caixas, pessoal, acessórios externos e os fardos de bagagem e combate.

EB60-MT-23.401
5-6
Fig 5-8 Caminhão VTNE 5 t MB 1418 (vista de fora)
Fig 5-9 Caminhão VTNE 5 t MB 1418 (vista de dentro da carroceria)
5.2.2.2 Transporte Marítimo – O içamento do material do cais e sua deposição nos porões dos navios de transporte devem ser feitos pelos paus de carga, obedecendo ao peso limite desses. Deve ser içado em suportes, por redes, evitando a queda do material.

EB60-MT-23.401
5-7
Fig 5-10 Embarcação EDCG Guarapari (Marinha do Brasil) - guindaste para içamento de carga
Fig 5-11 Embarcação EDCG Guarapari (Marinha do Brasil) - no convés, com fixação adequada
5.2.2.3 Transporte Aéreo – Pode ser transportado por qualquer aeronave militar que suporte seu peso. O acondicionamento deve ser feito em suportes e devidamente ancorado no interior da aeronave. O sistema não pode ser lançado de paraquedas. 5.2.2.4 Helitransporte – O Rdr SABER M60 pode ser transportado internamente pela Anv HM-3 (Cougar) e Anv HM-4 (Caracal) e, no gancho, pelas Anv HM-1 (Pantera) e HM-2 (Black Hawk). A Anv HA-1 (Esquilo ou Fennec) pode transportar no gancho, caso venha a sofrer adaptação para tal.

EB60-MT-23.401
5-8
Fig 5-12 Helicóptero UH-1H no gancho (capacidade até 1460 kg, curta distância, baixa velocidade, boas
condições climáticas)

EB60-MT-23.401
6-1
CAPÍTULO VI MANUTENÇÃO DE PRIMEIRO ESCALÃO
6.1 GENERALIDADES
6.1.1 CONCEITOS BÁSICOS
O Radar SABER M60 é um equipamento de concepção modular de sistemas integrados que englobam unidades e subunidades. Todas as partes são interligadas por cabos e/ou conectores, podendo ser substituídas pela equipe de manutenção da OM.
6.1.2 DEFINIÇÕES
6.1.2.1 Módulo – Parte do Radar (Radar) que, formando um conjunto funcional, pode ser testada e reparada separadamente. Exemplos: Módulo de Controle (Ct) e Rádio Frequência (RF), Unidade de Visualização (UV) do Radar e Módulo de Distribuição de Energia.
6.1.2.2 Unidade – Parte ou subconjunto do módulo, normalmente constituindo uma estrutura própria. Exemplos: Fonte de Alimentação e Caixa de Baterias.
6.1.2.3 Subunidade – Parte componente de uma unidade. A pane ou disfunção de uma subunidade é responsabilidade dos 3º e 4º escalões. Exemplos: Subunidade Sapata do Quadripé, Subunidade Bolha de Nivelamento.
6.1.3 MANUTENÇÃO ORGÂNICA
Compreende as atividades de manutenção preventiva e corretiva (de 1º e 2º escalões) realizadas por elemento de manutenção de OM de Artilharia Antiaérea (AAAe), com os seus meios orgânicos, de forma metódica, rápida e eficiente, visando a mantê-los nas melhores condições de apresentação e emprego. Um elemento de manutenção de OM AAAe pode atender às suas próprias necessidades ou de outra OM. A manutenção orgânica do Radar SABER M60 é realizada em duas fases:
a) pelo detentor ou operador do equipamento, antes, durante e após a sua utilização;
b) pelas Seções de Manutenção (Sec Mnt) de OM, por ocasião das revisões periódicas demaior complexidade que as de 1º escalão ou para a realização de pequenos reparos.
6.1 GENERALIDADES 6.2 EXECUÇÃO DA MANUTENÇÃO DE PRIMEIRO ESCALÃO

EB60-MT-23.401
6-2
6.1.4 NÍVEIS DE MANUTENÇÃO DO RADAR SABER M60 6.1.4.1 Manutenção de 1º escalão As atividades neste nível de manutenção são de natureza preventiva de forma simples, a cargo da guarnição. a) Objetivos: - apronto do Radar para operação; - verificação funcional do Sistema Radar; - localização de falhas ao nível de módulos; - relato da(s) falha(s) para o 2º escalão; e - correção de panes no funcionamento causadas por falta de observância das normas de montagem. b) Meios disponíveis: - teste de inicialização; - autoteste; - material de consumo (material de limpeza); e - documentação (manuais, livro-registro). 6.1.4.2 Manutenção de 2º escalão As atividades neste nível de manutenção são de natureza preventiva e corretiva, a cargo Sec Mnt OM. a) Objetivos: - verificação funcional (periódica ou não) dos módulos e unidades; - localização de falhas ao nível unidade; - substituição de módulos e/ou unidades; - apoio direto aos Radares posicionados no terreno, com o transporte de módulos de reposição e/ou unidades, podendo ser responsável, dependendo da distância e localização, pela manutenção de pelo menos 05 (cinco) sistemas Radar; - ligação com o 3º escalão para substituição ou reparo interno dos módulos e/ou unidades; e - reparos simples. b) Meios disponíveis: - os meios de 1º Escalão; - ferramental e sobressalentes (inclusive módulos e unidades); - documentação (livro-registro, manuais técnicos e cartas guia); e - outros que sejam disponibilizados. 6.1.4.3 Manutenção de 3º escalão Compreende as ações realizadas pela unidade de manutenção designada para tal fim, operando em instalações fixas, próprias ou mobilizadas, contando com laboratório dotado de instrumentação e ferramentas específicas e mão de obra qualificada. Engloba tarefas da atividade de manutenção corretiva, com ênfase na reparação de falhas de média complexidade, consertando ou substituindo o(s) dispositivo(s) defeituoso(s) pertencente(s) ao módulo e unidades em reparação. a) Objetivos: - reparação de módulos, unidades e/ou subunidades; - apoio ao 2º escalão, em reparo de falhas de média complexidade; e

EB60-MT-23.401
6-3
- suprimentos de módulos, unidades e subunidades. b) Meios disponíveis: - os existentes na infraestrutura logística do Exército Brasileiro. 6.1.4.4 Manutenção de 4º escalão Compreende as ações realizadas para o cumprimento das tarefas da atividade de manutenção modificadora, com ênfase na reparação de falhas de alta complexidade. Neste escalão de manutenção, o dispositivo defeituoso é analisado no nível de componente avariado o qual é substituído. Também está previsto neste nível a atualização e a manutenção do “logiciário” (software e firmware). Tem por objetivo a manutenção de fábrica (reparação de subunidade a nível componente) e possuir infraestrutura que inclua Eqp de teste controlado por computador 6.1.5 DESCRIÇÃO DOS MEIOS ORGÂNICOS PARA TESTES 6.1.5.1 Autoteste
a) O autoteste ou BIT consiste numa rotina de teste contínua durante o funcionamento do Radar, que tem a finalidade de verificar o estado das unidades. Em caso de pane durante a operação, a Caixa de Estado do Sistema apresenta a mensagem de “Sistema em Pane” e a Janela de BIT indica com a cor vermelha qual módulo encontra-se em falha.
b) São analisados pelo autoteste os seguintes módulos do Radar:
Módulo / Unidade
Teste realizado no módulo ou unidade
Bateria Fonte de alimentação da energia para o Radar, indicando o nível de carga da bateria.
UPS Fonte de alimentação ininterrupta: provê valores de sua temperatura, tensão e corrente de entrada.
Motor Motor de rotação do conjunto móvel acoplado à antena.
Pedestal O sensor verifica se os Parafusos de Fixação da Base da Antena estão totalmente fixados.
Antena Verifica a correta conexão dos cabos M60_W2 e M60_W4 e parafusos de fixação da antena com sensores de aperto.
RF Acusa mal funcionamento na emissão da RF.
FPGA Acusa mal funcionamento ou aquecimento da FPGA.
IFF Acusa mal funcionamento do IFF.
Placa-Mãe Acusa mal funcionamento ou aquecimento da Placa-Mãe.
Disco Armazenamento de dados (Hard-Disk).
Memória Indica o nível de memória RAM disponível.
CPU Acusa mal funcionamento da unidade de processamento.
Nível Eletrônica Indica qualidade do comportamento dos componentes eletrônicos.
Rastreamento Indica o estado do módulo do software rastreamento.
Processamento Indica o estado do módulo do software processamento.
BIT Acusa mal funcionamento da placa que realiza o autoteste. Tab 6-1 Itens de análise do autoteste

EB60-MT-23.401
6-4
c) Também são analisados pelo autoteste os seguintes módulos da UV
Módulo / Unidade Teste realizado no módulo ou unidade
Bateria Fonte de alimentação da energia para o sistema UV, indicando o nível de carga da bateria.
Temperatura Indica a temperatura da CPU.
Espaço em disco Indica o nível de espaço em disco disponível.
Memória Livre Indica o nível de memória RAM disponível.
Estado Rede Indica o estado da rede. Tab 6-2 Outros itens do autoteste
Figura 6-1 Bit do Radar e da UV
6.1.6 LÂMPADAS DE SINALIZAÇÃO NO MÓDULO DE CONTROLE E RADIOFREQUÊNCIA 6.1.6.1 Existem, na parte central do Módulo de Ct e RF, lâmpadas de sinalização (leds) que permitem diagnosticar possíveis problemas no Sistema Radar. Estão dispostas conforme a figura 6-2: 6.1.6.2 As lâmpadas acesas significam estado de normalidade do sistema, com exceção do parâmetro “BAT INVERTIDA” que acende apenas em caso de bateria invertida. Caso elas apaguem, cabe à guarnição verificar o problema de acordo com a tabela 6-3.

EB60-MT-23.401
6-5
Fig 6-2 Lâmpadas de sinalização no módulo de Ct e RF
Inscrição no módulo
Significado Provável Problema
Procedimento da Guarnição
BAT INVERTIDA
Indica bateria invertida
Fios dos polos da bateria trocados
Trocar os fios dos polos dentro da caixa de baterias
BAT CONECTADA
Carga da bateria Ausência de
bateria ou cabos danificados
Ligar fonte externa à caixa de baterias. Se estiver
conectada, verificar se os cabos estão corretos
CA CONECTADA
Alimentação externa Tensão fora dos limites de 90V e
230V
Se o cabo estiver conectado, verificar se não
está danificado, ou se o gerador está ok
CARREGADOR OK
Carregador da bateria
Defeito interno da UPS
Acionar Mnt de 3º Esc
Inscrição no módulo
Significado Provável Problema
Procedimento da Guarnição
TENSÃO BAT OK
Verifica tensão da bateria
Tensão abaixo do mínimo (20V)
Trocar a bateria ou recarregá-la
UPS OK Verifica todos os módulos e outras tensões internas
Algum parâmetro apresenta problema
Verificar o parâmetro que está com led apagado e, na ausência de problema,
acionar Mnt de 3º Esc Tab 6-3 Composição da fonte de alimentação
6.1.7 MENSAGENS DE EMERGÊNCIA Caso ocorra problema crítico que possa ocasionar danos irreversíveis no Radar, o Aplicativo Operacional informa, com alerta sonoro na UV, a situação de emergência, e o

EB60-MT-23.401
6-6
componente do BIT com a cor vermelha na janela do BIT. Uma mensagem informativa também é apresentada no display do Módulo de Ct e RF.
6.1.8 DETECTOR DE RADIOFREQUÊNCIA
O detector de RF destina-se a indicar a emissão (saída do sinal pela antena) de RF pelo Radar e S60 (IFF).
6.1.9 MULTÍMETRO
Ferramenta utilizada para realizar diagnósticos, por intermédio da medição de tensões, correntes, resistências e voltagens de componentes do Radar. Cabe aos responsáveis pela manutenção de 2º escalão a utilização do Multímetro, pois seu uso indevido pode causar curto nas baterias ou gerador.
6.2 EXECUÇÃO DA MANUTENÇÃO DE PRIMEIRO ESCALÃO
6.2.1 GENERALIDADES
6.2.1.1 A manutenção de 1º escalão tem por finalidade a perfeita conservação do material. É realizada pela própria guarnição do Radar por meio de procedimentos simples e sem uso de ferramental específico.
6.2.1.2 Na seção 6.2.2 - Itens Gerais de Manutenção de 1º escalão, são descritos procedimentos de manutenção para o Sistema Radar como um todo, e no artigo 6.2.3 - Itens Particulares de Manutenção de 1º escalão, são abordados procedimentos específicos relativos aos módulos e unidades que compõem o Radar SABER M60.
6.2.2 ITENS GERAIS DE MANUTENÇÃO DE 1º ESCALÃO
a) Limpeza externa com pano umedecido em água.b) Não utilizar água em jatos de alta pressão.c) Não utilizar produtos de limpeza com sabão, detergente e outros.d) Não utilizar materiais abrasivos (lixas, escovas, palhas de aço, etc.) nas partesexternas, que possam vir a desgastar a pintura. e) Usar pano seco para limpeza dos mostradores dos horímetros.f) Evitar choques mecânicos.g) Retirar poeira e detritos dos conectores com pincel seco.h) Não utilizar óleos lubrificantes nas partes móveis do Radar (exceção à Sapata doQuadripé). i) Realizar inspeção visual dos módulos, verificando a existência de anomalias comomossas, cabos quebrados, ausência de parafusos, tampa de conectores faltando, ou qualquer outra diferente da apresentação normal do Radar. j) Acompanhar as ferramentas orgânicas de diagnóstico (Teste de Inicialização eAutoteste).

EB60-MT-23.401
6-7
6.2.3 ITENS PARTICULARES DE MANUTENÇÃO DE 1º ESCALÃO
a) Quadripé- Limpar as Sapatas com pano úmido, secar e lubrificar com uma leve camada de
óleo de armamento. - Limpar cuidadosamente as ranhuras do parafuso sem-fim e a manivela de
nivelamento com pincel e pano úmido. Secar e lubrificar com uma leve camada de óleo de armamento. b) Pedestal
- Os sensores dos Parafusos de Fixação da Base da Antena não podem ser molhados. c) Antena
- Deve-se ter cuidado para que choques mecânicos não amassem os irradiadores. - Os conectores do cabo M60_W4 são suscetíveis a dano se submetidos à pressão
excessiva. d) Luneta
- Limpar as lentes com a flanela limpa e seca. Cuidado para não danificar as lentes. e) Unidade de Visualização do Radar
- Limpar a tela com pano seco. - Limpar o teclado com pincel seco.
f) Unidade de Visualização da UTir- Limpar a tela com pano seco. - Tirar poeira das ranhuras com pincel seco.
6.2.4 PROCEDIMENTOS DA GUARNIÇÃO DO RADAR BASEADOS NO AUTOTESTE
Os procedimentos podem ser realizados pela guarnição do Radar com base nas mensagens fornecidas pelo autoteste, visando sanar pequenas panes, conforme tabela abaixo:
Módulo / Unidade Procedimento da Guarnição do Radar
Bateria Ligar fonte externa de alimentação para carregar as baterias.
UPS Acionar a Seção de Mnt AAe da OM.
Motor Acionar a Seção de Mnt AAe da OM.
Pedestal Atarraxar os Parafusos de Fixação da Base do Pedestal.
Antena Verificar a ligação entre o Módulo de CT e RF e os irradiadores da antena (conexão do cabo M60_W4), e atarraxar os Parafusos de Fixação da Base da Antena.
RF Verificar a seção 6-8. Caso não solucione, deve-se acionar a Seção de Mnt AAe da OM.
FPGA Acionar a Seção de Mnt AAe da OM.
IFF Verificar a seção 6-8. Caso não solucione, deve-se acionar a Seção de Mnt AAe da OM.
Placa-Mãe Acionar a Seção de Mnt AAe da OM.
Disco Acionar a Seção de Mnt AAe da OM.
Memória Acionar a Seção de Mnt AAe da OM.
CPU Acionar a Seção de Mnt AAe da OM.
Nível Eletrônica Acionar a Seção de Mnt AAe da OM.

EB60-MT-23.401
6-8
Módulo / Unidade Procedimento da Guarnição do Radar
Rastreamento Acionar a Seção de Mnt AAe da OM.
Processamento Acionar a Seção de Mnt AAe da OM.
BIT Acionar a Seção de Mnt AAe da OM.
Tab 6-4 Procedimentos no autoteste
6.2.5 PROCEDIMENTO PARA RECUPERAÇÃO DO ESTADO INICIAL DO SISTEMA
6.2.5.1 Na ocorrência de sobrecarga ocasionada pela utilização intensa do Radar, podemser apresentados os seguintes comportamentos: a) não apresentação de alvos do Radar Primário e status de BIT do componente RF emvermelho; b) não apresentação de alvos do Radar Secundário e status de BIT do componente IFFem vermelho; c) Radar Primário não liga;d) Radar Secundário não liga; ee) lentidão do Aplicativo Operacional.
6.2.5.2 Na presença de algum desses comportamentos, deve-se seguir o seguinte procedimento: a) parar a emissão dos radares primário e secundário, por meio do AplicativoOperacional, para que a rotação do motor seja finalizada no norte definido; b) desligar o Aplicativo Operacional;c) na UPS, pressionar o botão “Desligar” até o sistema se desligar;d) na UPS, pressionar o botão ”Ligar” até o sistema iniciar;e) iniciar o Aplicativo Operacional; ef) conectar o Radar.
EB60-MT-23.401
LISTA DE DISTRIBUIÇÃO
1. ÓRGÃOS INTERNOS EXEMPLARES
DECEx:
- Asse Dout .................................................................... 01
- DET Mil ........................................................................ 01
- EsACosAAe.................................................................. 01
2. ÓRGÃOS EXTERNOS
EME................................................................................ 01
C Dout Ex....................................................................... 01
EPEx................................................................................ 01
CMSE............................................................................... 01
1ª Bda AAAe.................................................................... 01
DCT................................................................................. 01

EB60-MT-23.401
COMANDO DO EXÉRCITO
DEPARTAMENTO DE EDUCAÇÃO E CULTURA DO EXÉRCITO
Rio de Janeiro, RJ, 12 de fevereiro de 2016 https://doutrina.ensino.eb.br






























