Embed Size (px)
Citation preview

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Interconnected rigid bodies: Dynamic modelling
Sneha Gajbhiye and Ravi N Banavar([email protected]) 1
1Systems and Control Engineering,IIT Bombay, India
Research Symposium, ISRO-IISc Space Technology Cell,IISc, Bengaluru, February 22 - 27, 2016.
February 22, 2016
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Outline
1 Rigid body dynamics
2 Symmetry breaking potentials
3 Rolling constraints
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Outline
1 Rigid body dynamics
2 Symmetry breaking potentials
3 Rolling constraints
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Rotational Rigid body
x3X3
x2
X2
x1
X1
p
• xp
(t) 2 R3- position of a particle p in thebody in the spatial coordinate system
• Xp
- position of a particle p in bodyreference frame
• Configuration space of the body at timet is determined by a rotation matrix R(t)
Obody
R�! Ospatial
• the map X 7! x = RX is called thebody � to� space map
• Rotation matrices belong to a set ofspecial orthogonal group and have afollowing property
•SO(n) = {R 2 GL(n,R)|RRT = I
n
, det(R) = 1}• Configuration space Q of a rotational rigid body is SO(3)
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Rotational and translational rigid body
x1
x2
x3
X1
X2
X3
r
Ospatial
Obody
Configurationof rigid body
(Obody
�Ospatial
) 2 R3
[X1 | X2 | X3 ] 2 SO(3)
• Q = SO(3)⇥ R3 for a single rigid body
• For k rigid bodies,
Qf
= (SO(3)⇥ R3)⇥ · · ·⇥ (SO(3)⇥ R3)| {z }kcopies
• This is a mechanical system without constraints.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Rotational and translational rigid body
x1
x2
x3
X1
X2
X3
r
Ospatial
Obody
Configurationof rigid body
(Obody
�Ospatial
) 2 R3
[X1 | X2 | X3 ] 2 SO(3)
• Q = SO(3)⇥ R3 for a single rigid body
• For k rigid bodies,
Qf
= (SO(3)⇥ R3)⇥ · · ·⇥ (SO(3)⇥ R3)| {z }kcopies
• This is a mechanical system without constraints.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Interconnected rigid bodies
• Many mechanical systems consist of rigid bodies which areinterconnected.
• An interconnected mechanical system is a collection of rigid bodiesrestricted to move on a submanifold Q of Q
f
. The manifold Q is calleda configuration manifold.
• Coordinates of Q are denoted by (q1, · · · , qn) are called “generalizedcoordinates”.
• And for i 2 (1, · · · , k), ⇧i
: Q ! SO(3)⇥ R3 gives the configuration ofith body.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Interconnected rigid bodies
• Many mechanical systems consist of rigid bodies which areinterconnected.
• An interconnected mechanical system is a collection of rigid bodiesrestricted to move on a submanifold Q of Q
f
. The manifold Q is calleda configuration manifold.
• Coordinates of Q are denoted by (q1, · · · , qn) are called “generalizedcoordinates”.
• And for i 2 (1, · · · , k), ⇧i
: Q ! SO(3)⇥ R3 gives the configuration ofith body.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Interconnected rigid bodies
• Many mechanical systems consist of rigid bodies which areinterconnected.
• An interconnected mechanical system is a collection of rigid bodiesrestricted to move on a submanifold Q of Q
f
. The manifold Q is calleda configuration manifold.
• Coordinates of Q are denoted by (q1, · · · , qn) are called “generalizedcoordinates”.
• And for i 2 (1, · · · , k), ⇧i
: Q ! SO(3)⇥ R3 gives the configuration ofith body.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Interconnected rigid bodies
• Many mechanical systems consist of rigid bodies which areinterconnected.
• An interconnected mechanical system is a collection of rigid bodiesrestricted to move on a submanifold Q of Q
f
. The manifold Q is calleda configuration manifold.
• Coordinates of Q are denoted by (q1, · · · , qn) are called “generalizedcoordinates”.
• And for i 2 (1, · · · , k), ⇧i
: Q ! SO(3)⇥ R3 gives the configuration ofith body.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Interconnected rigid bodies
• Many mechanical systems consist of rigid bodies which areinterconnected.
• An interconnected mechanical system is a collection of rigid bodiesrestricted to move on a submanifold Q of Q
f
. The manifold Q is calleda configuration manifold.
• Coordinates of Q are denoted by (q1, · · · , qn) are called “generalizedcoordinates”.
• And for i 2 (1, · · · , k), ⇧i
: Q ! SO(3)⇥ R3 gives the configuration ofith body.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Example:Two link manipulator
• Q = SO(2)⇥ SO(2)
• Coordinates (✓1, ✓2)
• ⇧1(✓1, ✓2) = (R1, r1) and
• ⇧1(✓1, ✓2) = (R1, r1), where
R1 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 , R2 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 ,
r1 = l1R1s1, r2 = l1R1s1 + (l1 + l2)R2s1
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Example:Two link manipulator
• Q = SO(2)⇥ SO(2)
• Coordinates (✓1, ✓2)
• ⇧1(✓1, ✓2) = (R1, r1) and
• ⇧1(✓1, ✓2) = (R1, r1), where
R1 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 , R2 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 ,
r1 = l1R1s1, r2 = l1R1s1 + (l1 + l2)R2s1
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Example:Two link manipulator
• Q = SO(2)⇥ SO(2)
• Coordinates (✓1, ✓2)
• ⇧1(✓1, ✓2) = (R1, r1) and
• ⇧1(✓1, ✓2) = (R1, r1), where
R1 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 , R2 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 ,
r1 = l1R1s1, r2 = l1R1s1 + (l1 + l2)R2s1
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Example:Two link manipulator
• Q = SO(2)⇥ SO(2)
• Coordinates (✓1, ✓2)
• ⇧1(✓1, ✓2) = (R1, r1) and
• ⇧1(✓1, ✓2) = (R1, r1), where
R1 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 , R2 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 ,
r1 = l1R1s1, r2 = l1R1s1 + (l1 + l2)R2s1
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Example:Two link manipulator
• Q = SO(2)⇥ SO(2)
• Coordinates (✓1, ✓2)
• ⇧1(✓1, ✓2) = (R1, r1) and
• ⇧1(✓1, ✓2) = (R1, r1), where
R1 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 , R2 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 ,
r1 = l1R1s1, r2 = l1R1s1 + (l1 + l2)R2s1
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Example:Two link manipulator
• Q = SO(2)⇥ SO(2)
• Coordinates (✓1, ✓2)
• ⇧1(✓1, ✓2) = (R1, r1) and
• ⇧1(✓1, ✓2) = (R1, r1), where
R1 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 , R2 =
2
4cos ✓1 � sin ✓1 0sin ✓1 cos ✓1 00 0 1
3
5 ,
r1 = l1R1s1, r2 = l1R1s1 + (l1 + l2)R2s1
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian Mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• Dynamics on a reduced space
• Reconstruction
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian Mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R
• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• Dynamics on a reduced space
• Reconstruction
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian Mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• Dynamics on a reduced space
• Reconstruction
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian Mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• Dynamics on a reduced space
• Reconstruction
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian Mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• Dynamics on a reduced space
• Reconstruction
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian Mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• Dynamics on a reduced space
• Reconstruction
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
• Rigid body B undergoing motion t 7! R(t)
• Rigid body B with ⇢(X) as the density of the body
• Mass : m =RB ⇢(X) d3X
• Lagrangian of the rigid body is equal to rotational kinetic energy
L(R, R) = Krot
=12
Z
B⇢(X)kxk2 d3X =
12
Z
B⇢(X)k ˙RXk2 d3X
=12
Z
B⇢(X)kRXk2 d3X
• Spatial angular velocity: t 7! b!(t) = R(t)R�1(t)
• Body angular velocity: t 7! b⌦(t) = R�1(t)R(t)
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
• Rigid body B undergoing motion t 7! R(t)
• Rigid body B with ⇢(X) as the density of the body
• Mass : m =RB ⇢(X) d3X
• Lagrangian of the rigid body is equal to rotational kinetic energy
L(R, R) = Krot
=12
Z
B⇢(X)kxk2 d3X =
12
Z
B⇢(X)k ˙RXk2 d3X
=12
Z
B⇢(X)kRXk2 d3X
• Spatial angular velocity: t 7! b!(t) = R(t)R�1(t)
• Body angular velocity: t 7! b⌦(t) = R�1(t)R(t)
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
• Rigid body B undergoing motion t 7! R(t)
• Rigid body B with ⇢(X) as the density of the body
• Mass : m =RB ⇢(X) d3X
• Lagrangian of the rigid body is equal to rotational kinetic energy
L(R, R) = Krot
=12
Z
B⇢(X)kxk2 d3X =
12
Z
B⇢(X)k ˙RXk2 d3X
=12
Z
B⇢(X)kRXk2 d3X
• Spatial angular velocity: t 7! b!(t) = R(t)R�1(t)
• Body angular velocity: t 7! b⌦(t) = R�1(t)R(t)
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
• Rigid body B undergoing motion t 7! R(t)
• Rigid body B with ⇢(X) as the density of the body
• Mass : m =RB ⇢(X) d3X
• Lagrangian of the rigid body is equal to rotational kinetic energy
L(R, R) = Krot
=12
Z
B⇢(X)kxk2 d3X =
12
Z
B⇢(X)k ˙RXk2 d3X
=12
Z
B⇢(X)kRXk2 d3X
• Spatial angular velocity: t 7! b!(t) = R(t)R�1(t)
• Body angular velocity: t 7! b⌦(t) = R�1(t)R(t)
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
• The tangent vector (R, R) translated to so(3) (which is equal toTI
SO(3)), by the tangent lift of left/right multiplication by R�1
TR
LR
�1
(R, R) = (I, R�1R), TR
LR
�1
(R, R) = (I, RR�1)
• Both b! and b⌦ lie in so(3) ) define !,⌦ 2 R3 by the rule2
40 �c bc 0 �a�b a 0
3
5 (a, b, c)
• Adjoint map
ad :so(3)⇥ so(3) ! so(3)
(bx, by) 7! adbxby = (x⇥ y)^
• Dual of adjoint map
ad⇤ :so(3)⇥ so
⇤(3) ! so
⇤(3)
(bx, ✓) 7! ad⇤bx✓ = �(x⇥ ✓)^
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
• The tangent vector (R, R) translated to so(3) (which is equal toTI
SO(3)), by the tangent lift of left/right multiplication by R�1
TR
LR
�1
(R, R) = (I, R�1R), TR
LR
�1
(R, R) = (I, RR�1)
• Both b! and b⌦ lie in so(3) ) define !,⌦ 2 R3 by the rule2
40 �c bc 0 �a�b a 0
3
5 (a, b, c)
• Adjoint map
ad :so(3)⇥ so(3) ! so(3)
(bx, by) 7! adbxby = (x⇥ y)^
• Dual of adjoint map
ad⇤ :so(3)⇥ so
⇤(3) ! so
⇤(3)
(bx, ✓) 7! ad⇤bx✓ = �(x⇥ ✓)^
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
• The tangent vector (R, R) translated to so(3) (which is equal toTI
SO(3)), by the tangent lift of left/right multiplication by R�1
TR
LR
�1
(R, R) = (I, R�1R), TR
LR
�1
(R, R) = (I, RR�1)
• Both b! and b⌦ lie in so(3) ) define !,⌦ 2 R3 by the rule2
40 �c bc 0 �a�b a 0
3
5 (a, b, c)
• Adjoint map
ad :so(3)⇥ so(3) ! so(3)
(bx, by) 7! adbxby = (x⇥ y)^
• Dual of adjoint map
ad⇤ :so(3)⇥ so
⇤(3) ! so
⇤(3)
(bx, ✓) 7! ad⇤bx✓ = �(x⇥ ✓)^
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
• The tangent vector (R, R) translated to so(3) (which is equal toTI
SO(3)), by the tangent lift of left/right multiplication by R�1
TR
LR
�1
(R, R) = (I, R�1R), TR
LR
�1
(R, R) = (I, RR�1)
• Both b! and b⌦ lie in so(3) ) define !,⌦ 2 R3 by the rule2
40 �c bc 0 �a�b a 0
3
5 (a, b, c)
• Adjoint map
ad :so(3)⇥ so(3) ! so(3)
(bx, by) 7! adbxby = (x⇥ y)^
• Dual of adjoint map
ad⇤ :so(3)⇥ so
⇤(3) ! so
⇤(3)
(bx, ✓) 7! ad⇤bx✓ = �(x⇥ ✓)^
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
LagrangianL : TQ ! RL(R, R)
Group action
SO(3)⇥ SO(3)L�! SO(3)
R 7! LR
�1
R = R�1R
Reduced LagrangianL(TL
R
�1
(R, R))= L(R�1R,R�1R)
= l(I, ⌦)
•
Krot
=12
Z
B⇢(X)kR�1RXk2 d3X,
=12
Z
B⇢(X)kb⌦Xk2 d3X =
12
Z
B⇢(X)k bX⌦k2 d3X,
=12⌦T
✓Z
B⇢(X) bXT bX d3X
◆⌦
• Identity concerning hat map bXT bX = kXk2I = XTX, looks remarkablylike a moment of inertia tensor
I =✓Z
B⇢(X)kXk2I = XTX d3X
◆
• Reduced Lagrangian l(⌦) = 12⌦T I⌦
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
LagrangianL : TQ ! RL(R, R)
Group action
SO(3)⇥ SO(3)L�! SO(3)
R 7! LR
�1
R = R�1R
Reduced LagrangianL(TL
R
�1
(R, R))= L(R�1R,R�1R)
= l(I, ⌦)•
Krot
=12
Z
B⇢(X)kR�1RXk2 d3X,
=12
Z
B⇢(X)kb⌦Xk2 d3X =
12
Z
B⇢(X)k bX⌦k2 d3X,
=12⌦T
✓Z
B⇢(X) bXT bX d3X
◆⌦
• Identity concerning hat map bXT bX = kXk2I = XTX, looks remarkablylike a moment of inertia tensor
I =✓Z
B⇢(X)kXk2I = XTX d3X
◆
• Reduced Lagrangian l(⌦) = 12⌦T I⌦
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
LagrangianL : TQ ! RL(R, R)
Group action
SO(3)⇥ SO(3)L�! SO(3)
R 7! LR
�1
R = R�1R
Reduced LagrangianL(TL
R
�1
(R, R))= L(R�1R,R�1R)
= l(I, ⌦)•
Krot
=12
Z
B⇢(X)kR�1RXk2 d3X,
=12
Z
B⇢(X)kb⌦Xk2 d3X =
12
Z
B⇢(X)k bX⌦k2 d3X,
=12⌦T
✓Z
B⇢(X) bXT bX d3X
◆⌦
• Identity concerning hat map bXT bX = kXk2I = XTX, looks remarkablylike a moment of inertia tensor
I =✓Z
B⇢(X)kXk2I = XTX d3X
◆
• Reduced Lagrangian l(⌦) = 12⌦T I⌦
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
LagrangianL : TQ ! RL(R, R)
Group action
SO(3)⇥ SO(3)L�! SO(3)
R 7! LR
�1
R = R�1R
Reduced LagrangianL(TL
R
�1
(R, R))= L(R�1R,R�1R)
= l(I, ⌦)•
Krot
=12
Z
B⇢(X)kR�1RXk2 d3X,
=12
Z
B⇢(X)kb⌦Xk2 d3X =
12
Z
B⇢(X)k bX⌦k2 d3X,
=12⌦T
✓Z
B⇢(X) bXT bX d3X
◆⌦
• Identity concerning hat map bXT bX = kXk2I = XTX, looks remarkablylike a moment of inertia tensor
I =✓Z
B⇢(X)kXk2I = XTX d3X
◆
• Reduced Lagrangian l(⌦) = 12⌦T I⌦
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Hamilton’s variational principle
�
Zt
1
t
0
l(⌦) dt = 0,
�R = 0 at t = t0 and t = t1; �⌦ restricted to be of the form
�b⌦ = b⌘ + adb⌦b⌘
where b⌘ = R�1�R is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduced Variational principle
�
Zb
a
l(⌦(t)) dt = 0,
)Z
b
a
h @l@⌦
, �⌦idt = 0
)Z
b
a
h @l@⌦
, ⌘ + ad⌦⌘i dt =Z
b
a
h @l@⌦
, ⌘i+ h @l@⌦
, ad⌦⌘i dt = 0
Zb
a
h� d
dt
✓@l
@⌦
◆+ ad⇤⌦
✓@l
@⌦
◆, ⌘i dt = 0
• The resulting dynamics is Euler-Poincare Equation
d
dt
@l
@⌦� ad⇤⌦
@l
@⌦= 0
ad⇤⇠
: so⇤(3) �! so
⇤(3) is dual of adjoint action on so(3)
• Calculating the dynamics: I⌦ = I⌦⇥ ⌦
• Reconstruction : g(t) = g(t)⇠ =) R = Rb⌦
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduced Variational principle
�
Zb
a
l(⌦(t)) dt = 0,
)Z
b
a
h @l@⌦
, �⌦idt = 0
)Z
b
a
h @l@⌦
, ⌘ + ad⌦⌘i dt =Z
b
a
h @l@⌦
, ⌘i+ h @l@⌦
, ad⌦⌘i dt = 0
Zb
a
h� d
dt
✓@l
@⌦
◆+ ad⇤⌦
✓@l
@⌦
◆, ⌘i dt = 0
• The resulting dynamics is Euler-Poincare Equation
d
dt
@l
@⌦� ad⇤⌦
@l
@⌦= 0
ad⇤⇠
: so⇤(3) �! so
⇤(3) is dual of adjoint action on so(3)
• Calculating the dynamics: I⌦ = I⌦⇥ ⌦
• Reconstruction : g(t) = g(t)⇠ =) R = Rb⌦
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduced Variational principle
�
Zb
a
l(⌦(t)) dt = 0,
)Z
b
a
h @l@⌦
, �⌦idt = 0
)Z
b
a
h @l@⌦
, ⌘ + ad⌦⌘i dt =Z
b
a
h @l@⌦
, ⌘i+ h @l@⌦
, ad⌦⌘i dt = 0
Zb
a
h� d
dt
✓@l
@⌦
◆+ ad⇤⌦
✓@l
@⌦
◆, ⌘i dt = 0
• The resulting dynamics is Euler-Poincare Equation
d
dt
@l
@⌦� ad⇤⌦
@l
@⌦= 0
ad⇤⇠
: so⇤(3) �! so
⇤(3) is dual of adjoint action on so(3)
• Calculating the dynamics: I⌦ = I⌦⇥ ⌦
• Reconstruction : g(t) = g(t)⇠ =) R = Rb⌦
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Outline
1 Rigid body dynamics
2 Symmetry breaking potentials
3 Rolling constraints
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
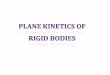
Breaking symmetry
The full Lie group symmetry is sometimes broken. For instance in arotating top the gravitational potential breaks the symmetry of theLagrangian L.
X k g
Figure: Heavy top example
• Q = SO(3)
• Group : G = SO(3)
• Symmetric group:G
k
= {R 2 SO(3)|RT k = k}.• where k = (0, 0, 1).
• The Lagrangian function’s G-invariance is now expressed with anadvected parameter. (the terminology “advected” finds its source influid modeling as invariants of a flow 1).
1D. D. Holm et al: Geometric Mechanics and Symmetry, Oxford Texts, 2009.February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Breaking symmetry
The full Lie group symmetry is sometimes broken. For instance in arotating top the gravitational potential breaks the symmetry of theLagrangian L.
X k g
Figure: Heavy top example
• Q = SO(3)
• Group : G = SO(3)
• Symmetric group:G
k
= {R 2 SO(3)|RT k = k}.• where k = (0, 0, 1).
• The Lagrangian function’s G-invariance is now expressed with anadvected parameter. (the terminology “advected” finds its source influid modeling as invariants of a flow 1).
1D. D. Holm et al: Geometric Mechanics and Symmetry, Oxford Texts, 2009.February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Breaking symmetry
The full Lie group symmetry is sometimes broken. For instance in arotating top the gravitational potential breaks the symmetry of theLagrangian L.
X k g
Figure: Heavy top example
• Q = SO(3)
• Group : G = SO(3)
• Symmetric group:G
k
= {R 2 SO(3)|RT k = k}.• where k = (0, 0, 1).
• The Lagrangian function’s G-invariance is now expressed with anadvected parameter. (the terminology “advected” finds its source influid modeling as invariants of a flow 1).
1D. D. Holm et al: Geometric Mechanics and Symmetry, Oxford Texts, 2009.February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Breaking symmetry
The full Lie group symmetry is sometimes broken. For instance in arotating top the gravitational potential breaks the symmetry of theLagrangian L.
X k g
Figure: Heavy top example
• Q = SO(3)
• Group : G = SO(3)
• Symmetric group:G
k
= {R 2 SO(3)|RT k = k}.• where k = (0, 0, 1).
• The Lagrangian function’s G-invariance is now expressed with anadvected parameter. (the terminology “advected” finds its source influid modeling as invariants of a flow 1).
1D. D. Holm et al: Geometric Mechanics and Symmetry, Oxford Texts, 2009.February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Breaking symmetry
The full Lie group symmetry is sometimes broken. For instance in arotating top the gravitational potential breaks the symmetry of theLagrangian L.
X k g
Figure: Heavy top example
• Q = SO(3)
• Group : G = SO(3)
• Symmetric group:G
k
= {R 2 SO(3)|RT k = k}.
• where k = (0, 0, 1).
• The Lagrangian function’s G-invariance is now expressed with anadvected parameter. (the terminology “advected” finds its source influid modeling as invariants of a flow 1).
1D. D. Holm et al: Geometric Mechanics and Symmetry, Oxford Texts, 2009.February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Breaking symmetry
The full Lie group symmetry is sometimes broken. For instance in arotating top the gravitational potential breaks the symmetry of theLagrangian L.
X k g
Figure: Heavy top example
• Q = SO(3)
• Group : G = SO(3)
• Symmetric group:G
k
= {R 2 SO(3)|RT k = k}.• where k = (0, 0, 1).
• The Lagrangian function’s G-invariance is now expressed with anadvected parameter. (the terminology “advected” finds its source influid modeling as invariants of a flow 1).
1D. D. Holm et al: Geometric Mechanics and Symmetry, Oxford Texts, 2009.February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Breaking symmetry
The full Lie group symmetry is sometimes broken. For instance in arotating top the gravitational potential breaks the symmetry of theLagrangian L.
X k g
Figure: Heavy top example
• Q = SO(3)
• Group : G = SO(3)
• Symmetric group:G
k
= {R 2 SO(3)|RT k = k}.• where k = (0, 0, 1).
• The Lagrangian function’s G-invariance is now expressed with anadvected parameter. (the terminology “advected” finds its source influid modeling as invariants of a flow 1).
1D. D. Holm et al: Geometric Mechanics and Symmetry, Oxford Texts, 2009.February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Breaking symmetry
The full Lie group symmetry is sometimes broken. For instance in arotating top the gravitational potential breaks the symmetry of theLagrangian L.
X k g
Figure: Heavy top example
• Q = SO(3)
• Group : G = SO(3)
• Symmetric group:G
k
= {R 2 SO(3)|RT k = k}.• where k = (0, 0, 1).
• The Lagrangian function’s G-invariance is now expressed with anadvected parameter. (the terminology “advected” finds its source influid modeling as invariants of a flow 1).
1D. D. Holm et al: Geometric Mechanics and Symmetry, Oxford Texts, 2009.February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Breaking symmetry
The full Lie group symmetry is sometimes broken. For instance in arotating top the gravitational potential breaks the symmetry of theLagrangian L.
X k g
Figure: Heavy top example
• Q = SO(3)
• Group : G = SO(3)
• Symmetric group:G
k
= {R 2 SO(3)|RT k = k}.• where k = (0, 0, 1).
• The Lagrangian function’s G-invariance is now expressed with anadvected parameter. (the terminology “advected” finds its source influid modeling as invariants of a flow 1).
1D. D. Holm et al: Geometric Mechanics and Symmetry, Oxford Texts, 2009.February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian reduction
• We can take advantage of full broken symmetry as follows
• Start with extended space Q = SO(3)⇥R3 so that k can be consideredas the new coordinate v 2 R3
• Define L = T (SO(3))⇥ R3 ! R on Q
• Such thatL
ext
(R, R, v, v)|v=k
= L(R, R) (1)
• Motion is determined by L(via Hamilton’s principle) corresponds tothe motion determined by L
ext
, with added constraint.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian reduction
• We can take advantage of full broken symmetry as follows
• Start with extended space Q = SO(3)⇥R3 so that k can be consideredas the new coordinate v 2 R3
• Define L = T (SO(3))⇥ R3 ! R on Q
• Such thatL
ext
(R, R, v, v)|v=k
= L(R, R) (1)
• Motion is determined by L(via Hamilton’s principle) corresponds tothe motion determined by L
ext
, with added constraint.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian reduction
• We can take advantage of full broken symmetry as follows
• Start with extended space Q = SO(3)⇥R3 so that k can be consideredas the new coordinate v 2 R3
• Define L = T (SO(3))⇥ R3 ! R on Q
• Such thatL
ext
(R, R, v, v)|v=k
= L(R, R) (1)
• Motion is determined by L(via Hamilton’s principle) corresponds tothe motion determined by L
ext
, with added constraint.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian reduction
• We can take advantage of full broken symmetry as follows
• Start with extended space Q = SO(3)⇥R3 so that k can be consideredas the new coordinate v 2 R3
• Define L = T (SO(3))⇥ R3 ! R on Q
• Such thatL
ext
(R, R, v, v)|v=k
= L(R, R) (1)
• Motion is determined by L(via Hamilton’s principle) corresponds tothe motion determined by L
ext
, with added constraint.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian reduction
• We can take advantage of full broken symmetry as follows
• Start with extended space Q = SO(3)⇥R3 so that k can be consideredas the new coordinate v 2 R3
• Define L = T (SO(3))⇥ R3 ! R on Q
• Such thatL
ext
(R, R, v, v)|v=k
= L(R, R) (1)
• Motion is determined by L(via Hamilton’s principle) corresponds tothe motion determined by L
ext
, with added constraint.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Symmetry breaking potential and the associated machinery
• Lagrangian L : TSO(3)⇥ R3 ! R
L(R, k, R) = l(R�1R,R�1k,R�1R)
= l(e,�, b⌦)
• Lagrangian: L(R, R) = 12
RB ⇢(X)kRXk d3X +mglhk,RX i
l =12hIb⌦, b⌦i+mglhR�1
k,�i = 12hIb⌦, b⌦i+mgh�,�i
Hamilton’s variational principle
�
Zt
1
t
0
l(⌦,�) dt = 0,
�R = 0 at t = t0 and t = t1
�b⌦ = ⌘ + ad⌦⌘ �� = �b⌘�
b⌘ = R�1�R is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Symmetry breaking potential and the associated machinery
• Lagrangian L : TSO(3)⇥ R3 ! R
L(R, k, R) = l(R�1R,R�1k,R�1R)
= l(e,�, b⌦)
• Lagrangian: L(R, R) = 12
RB ⇢(X)kRXk d3X +mglhk,RX i
l =12hIb⌦, b⌦i+mglhR�1
k,�i = 12hIb⌦, b⌦i+mgh�,�i
Hamilton’s variational principle
�
Zt
1
t
0
l(⌦,�) dt = 0,
�R = 0 at t = t0 and t = t1
�b⌦ = ⌘ + ad⌦⌘ �� = �b⌘�
b⌘ = R�1�R is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Symmetry breaking potential and the associated machinery
• Lagrangian L : TSO(3)⇥ R3 ! R
L(R, k, R) = l(R�1R,R�1k,R�1R)
= l(e,�, b⌦)
• Lagrangian: L(R, R) = 12
RB ⇢(X)kRXk d3X +mglhk,RX i
l =12hIb⌦, b⌦i+mglhR�1
k,�i = 12hIb⌦, b⌦i+mgh�,�i
Hamilton’s variational principle
�
Zt
1
t
0
l(⌦,�) dt = 0,
�R = 0 at t = t0 and t = t1
�b⌦ = ⌘ + ad⌦⌘ �� = �b⌘�
b⌘ = R�1�R is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Symmetry breaking potential and the associated machinery
• Lagrangian L : TSO(3)⇥ R3 ! R
L(R, k, R) = l(R�1R,R�1k,R�1R)
= l(e,�, b⌦)
• Lagrangian: L(R, R) = 12
RB ⇢(X)kRXk d3X +mglhk,RX i
l =12hIb⌦, b⌦i+mglhR�1
k,�i = 12hIb⌦, b⌦i+mgh�,�i
Hamilton’s variational principle
�
Zt
1
t
0
l(⌦,�) dt = 0,
�R = 0 at t = t0 and t = t1
�b⌦ = ⌘ + ad⌦⌘ �� = �b⌘�
b⌘ = R�1�R is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
The dynamic equations
•d
dt
@l
@⌦� ⌦⇥ @l
@⌦= �⇥ @l
@�
• Carrying out the di↵erentials we get
I⌦ = I⌦⇥ ⌦+mg�⇥ �, Euler-Poincare equation
� = �⇥ ⌦. Advection dynamics
�(t) = R�1(t)k.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
The dynamic equations
•d
dt
@l
@⌦� ⌦⇥ @l
@⌦= �⇥ @l
@�
• Carrying out the di↵erentials we get
I⌦ = I⌦⇥ ⌦+mg�⇥ �, Euler-Poincare equation
� = �⇥ ⌦. Advection dynamics
�(t) = R�1(t)k.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
The dynamic equations
•d
dt
@l
@⌦� ⌦⇥ @l
@⌦= �⇥ @l
@�
• Carrying out the di↵erentials we get
I⌦ = I⌦⇥ ⌦+mg�⇥ �, Euler-Poincare equation
� = �⇥ ⌦. Advection dynamics
�(t) = R�1(t)k.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
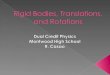
Heavy top with two rotors
Figure: Heavy top with two rotors, eachconsists of two rigidly coupled disk.
• Q = SO(3)⇥ R3
| {z }group space
⇥ S1 ⇥ S1
| {z }shape space
• ✓ = (✓1, ✓2) 2 S1 ⇥ S1
• Lie group G = SO(3)
L(R, k, ✓, R, ✓) = l(R�1R,R�1k, ✓, R�1R, ✓)
= l(e,�, ✓, b⌦, ✓)
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Heavy top with two rotors
Figure: Heavy top with two rotors, eachconsists of two rigidly coupled disk.
• Q = SO(3)⇥ R3
| {z }group space
⇥ S1 ⇥ S1
| {z }shape space
• ✓ = (✓1, ✓2) 2 S1 ⇥ S1
• Lie group G = SO(3)
L(R, k, ✓, R, ✓) = l(R�1R,R�1k, ✓, R�1R, ✓)
= l(e,�, ✓, b⌦, ✓)
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Heavy top with two rotors
Figure: Heavy top with two rotors, eachconsists of two rigidly coupled disk.
• Q = SO(3)⇥ R3
| {z }group space
⇥ S1 ⇥ S1
| {z }shape space
• ✓ = (✓1, ✓2) 2 S1 ⇥ S1
• Lie group G = SO(3)
L(R, k, ✓, R, ✓) = l(R�1R,R�1k, ✓, R�1R, ✓)
= l(e,�, ✓, b⌦, ✓)
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Heavy top with two rotors
Figure: Heavy top with two rotors, eachconsists of two rigidly coupled disk.
• Q = SO(3)⇥ R3
| {z }group space
⇥ S1 ⇥ S1
| {z }shape space
• ✓ = (✓1, ✓2) 2 S1 ⇥ S1
• Lie group G = SO(3)
L(R, k, ✓, R, ✓) = l(R�1R,R�1k, ✓, R�1R, ✓)
= l(e,�, ✓, b⌦, ✓)
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Heavy top with two rotors
Figure: Heavy top with two rotors, eachconsists of two rigidly coupled disk.
• Q = SO(3)⇥ R3
| {z }group space
⇥ S1 ⇥ S1
| {z }shape space
• ✓ = (✓1, ✓2) 2 S1 ⇥ S1
• Lie group G = SO(3)
L(R, k, ✓, R, ✓) = l(R�1R,R�1k, ✓, R�1R, ✓)
= l(e,�, ✓, b⌦, ✓)
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Hamilton’s Variational Principle
�
Zt
1
t
0
l(⌦,�, ✓, ✓) dt = 0,
�R = 0 and �✓ = 0 at t = t0 and t = t1
�b⌦ = ⌘ + ad⌦⌘ �� = �b⌘�
b⌘ = R�1�R is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
The dynamics Equation
d
dt
@l
@⌦� ⌦⇥ @l
@⌦= �⇥ @l
@�Euler-Poincare equation
d
dt
@l
@✓� @l
@✓= ⌧. Euler-Lagrange equation
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Hamilton’s Variational Principle
�
Zt
1
t
0
l(⌦,�, ✓, ✓) dt = 0,
�R = 0 and �✓ = 0 at t = t0 and t = t1
�b⌦ = ⌘ + ad⌦⌘ �� = �b⌘�
b⌘ = R�1�R is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
The dynamics Equation
d
dt
@l
@⌦� ⌦⇥ @l
@⌦= �⇥ @l
@�Euler-Poincare equation
d
dt
@l
@✓� @l
@✓= ⌧. Euler-Lagrange equation
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Outline
1 Rigid body dynamics
2 Symmetry breaking potentials
3 Rolling constraints
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
A spherical robot
Configuration space
Q = R2 ⇥ SO(3)⇥ S1 ⇥ S1 ⇥ S1
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
A spherical robot
Configuration space
Q = R2 ⇥ SO(3)⇥ S1 ⇥ S1 ⇥ S1
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
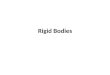
Rolling constraint
C
O
x
r
Figure: A rolling sphere with velocity of thecenter being x
VC
= 0.
x = xe1 + ye2
x = VC
+ (!s
)I ⇥ re3
x = (!s
)I ⇥ re3.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• A distribution of velocities is a linear subspace D
q
⇢ Tq
Q at everypoint q 2 Q (appears in the context of nonholonomic systems.)
• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Structure properties
• System is independent of certain base variable Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• The equation of motion independent of base body configuration,Reduction
• Dynamic equation is termed as the Euler-Poincare equation.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• A distribution of velocities is a linear subspace D
q
⇢ Tq
Q at everypoint q 2 Q (appears in the context of nonholonomic systems.)
• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Structure properties
• System is independent of certain base variable Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• The equation of motion independent of base body configuration,Reduction
• Dynamic equation is termed as the Euler-Poincare equation.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• A distribution of velocities is a linear subspace D
q
⇢ Tq
Q at everypoint q 2 Q (appears in the context of nonholonomic systems.)
• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Structure properties
• System is independent of certain base variable
Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• The equation of motion independent of base body configuration,Reduction
• Dynamic equation is termed as the Euler-Poincare equation.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• A distribution of velocities is a linear subspace D
q
⇢ Tq
Q at everypoint q 2 Q (appears in the context of nonholonomic systems.)
• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Structure properties
• System is independent of certain base variable Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• The equation of motion independent of base body configuration,Reduction
• Dynamic equation is termed as the Euler-Poincare equation.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• A distribution of velocities is a linear subspace D
q
⇢ Tq
Q at everypoint q 2 Q (appears in the context of nonholonomic systems.)
• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Structure properties
• System is independent of certain base variable Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• The equation of motion independent of base body configuration,Reduction
• Dynamic equation is termed as the Euler-Poincare equation.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• A distribution of velocities is a linear subspace D
q
⇢ Tq
Q at everypoint q 2 Q (appears in the context of nonholonomic systems.)
• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Structure properties
• System is independent of certain base variable Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• The equation of motion independent of base body configuration,
Reduction
• Dynamic equation is termed as the Euler-Poincare equation.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• A distribution of velocities is a linear subspace D
q
⇢ Tq
Q at everypoint q 2 Q (appears in the context of nonholonomic systems.)
• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Structure properties
• System is independent of certain base variable Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• The equation of motion independent of base body configuration,Reduction
• Dynamic equation is termed as the Euler-Poincare equation.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian mechanics
• The set of all possible configurations of a mechanical system is asmooth manifold Q and velocities is the tangent bundle TQ.
• The Lagrangian is a map L : TQ �! R• A distribution of velocities is a linear subspace D
q
⇢ Tq
Q at everypoint q 2 Q (appears in the context of nonholonomic systems.)
• The equations of motion on TQ are given by the principle of leastaction applied to a Lagrangian function L.
Structure properties
• System is independent of certain base variable Symmetry
• The Lagrangian function is invariant under a Lie group action
L(g · q) = L(q) 8q 2 TQ, 8g 2 G,
where G is a Lie group.
• The equation of motion independent of base body configuration,Reduction
• Dynamic equation is termed as the Euler-Poincare equation.February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Spherical Robot (Contd.)
• Q = (SO(3)⇥ R2)⇥ S where S = S1 ⇥ S1 ⇥ S1
• Lagrangian of the system with 3-rotors is given by
L =12m
T
kxk2 + 12!T
s
(Is
+ J)!s
+12
⇣⇥J⇥+ 2!T
s
J⇥⌘
• Rolling constraint x = (!s
)I ⇥ re3
Symmetry
• Restriction of R3 to horizontal subspace R2 breaks the symmetry of thesystem.
• Left group action, G = SO(3)n R3 on manifold Q.
• L and distribution D is invariant with respect to subgroup Ge
3
of G
Ge
3
= {(Rs
, b) 2 G = SO(3)⇥R3|RT
s
e3 = e3, hb, e3i = constant} = SO(2)nR2.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Spherical Robot (Contd.)
• Q = (SO(3)⇥ R2)⇥ S where S = S1 ⇥ S1 ⇥ S1
• Lagrangian of the system with 3-rotors is given by
L =12m
T
kxk2 + 12!T
s
(Is
+ J)!s
+12
⇣⇥J⇥+ 2!T
s
J⇥⌘
• Rolling constraint x = (!s
)I ⇥ re3
Symmetry
• Restriction of R3 to horizontal subspace R2 breaks the symmetry of thesystem.
• Left group action, G = SO(3)n R3 on manifold Q.
• L and distribution D is invariant with respect to subgroup Ge
3
of G
Ge
3
= {(Rs
, b) 2 G = SO(3)⇥R3|RT
s
e3 = e3, hb, e3i = constant} = SO(2)nR2.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Spherical Robot (Contd.)
• Q = (SO(3)⇥ R2)⇥ S where S = S1 ⇥ S1 ⇥ S1
• Lagrangian of the system with 3-rotors is given by
L =12m
T
kxk2 + 12!T
s
(Is
+ J)!s
+12
⇣⇥J⇥+ 2!T
s
J⇥⌘
• Rolling constraint x = (!s
)I ⇥ re3
Symmetry
• Restriction of R3 to horizontal subspace R2 breaks the symmetry of thesystem.
• Left group action, G = SO(3)n R3 on manifold Q.
• L and distribution D is invariant with respect to subgroup Ge
3
of G
Ge
3
= {(Rs
, b) 2 G = SO(3)⇥R3|RT
s
e3 = e3, hb, e3i = constant} = SO(2)nR2.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduction
• Start with extended configuration Q = SO(3)⇥ R3 ⇥ S1 ⇥ S1 ⇥ S1 andthe action is with respect to G = SO(3)n R3.
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = L(Rs
, p, Rs
, X, R↵
, R'
, R↵
, R'
) |p=e
3
• The system reduced from TQ to se(3)⇥O⇥TS1 ⇥TS1 ⇥TS1 by groupaction. On se(3)⇥O ⇥ TS1 ⇥ TS1 we define a reduced Lagrangian
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = l(e,RT
s
Rs
, RT
s
X, RT
s
e3, R↵
, R'
, R↵
, R'
),
= l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
)
• From this, the reduced equations of motion are obtained onso(3)⇥O ⇥ TS1 ⇥ TS1 ⇥ TS1 primarily in terms of the reducedconstrained Lagrangian
l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
) = lc
(b!s
s
, b!s
s
�,�, R↵
, R'
, R↵
, R'
).
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduction
• Start with extended configuration Q = SO(3)⇥ R3 ⇥ S1 ⇥ S1 ⇥ S1 andthe action is with respect to G = SO(3)n R3.
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = L(Rs
, p, Rs
, X, R↵
, R'
, R↵
, R'
) |p=e
3
• The system reduced from TQ to se(3)⇥O⇥TS1 ⇥TS1 ⇥TS1 by groupaction. On se(3)⇥O ⇥ TS1 ⇥ TS1 we define a reduced Lagrangian
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = l(e,RT
s
Rs
, RT
s
X, RT
s
e3, R↵
, R'
, R↵
, R'
),
= l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
)
• From this, the reduced equations of motion are obtained onso(3)⇥O ⇥ TS1 ⇥ TS1 ⇥ TS1 primarily in terms of the reducedconstrained Lagrangian
l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
) = lc
(b!s
s
, b!s
s
�,�, R↵
, R'
, R↵
, R'
).
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduction
• Start with extended configuration Q = SO(3)⇥ R3 ⇥ S1 ⇥ S1 ⇥ S1 andthe action is with respect to G = SO(3)n R3.
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = L(Rs
, p, Rs
, X, R↵
, R'
, R↵
, R'
) |p=e
3
• The system reduced from TQ to se(3)⇥O⇥TS1 ⇥TS1 ⇥TS1 by groupaction. On se(3)⇥O ⇥ TS1 ⇥ TS1 we define a reduced Lagrangian
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = l(e,RT
s
Rs
, RT
s
X, RT
s
e3, R↵
, R'
, R↵
, R'
),
= l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
)
• From this, the reduced equations of motion are obtained onso(3)⇥O ⇥ TS1 ⇥ TS1 ⇥ TS1 primarily in terms of the reducedconstrained Lagrangian
l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
) = lc
(b!s
s
, b!s
s
�,�, R↵
, R'
, R↵
, R'
).
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduction
• Start with extended configuration Q = SO(3)⇥ R3 ⇥ S1 ⇥ S1 ⇥ S1 andthe action is with respect to G = SO(3)n R3.
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = L(Rs
, p, Rs
, X, R↵
, R'
, R↵
, R'
) |p=e
3
• The system reduced from TQ to se(3)⇥O⇥TS1 ⇥TS1 ⇥TS1 by groupaction. On se(3)⇥O ⇥ TS1 ⇥ TS1 we define a reduced Lagrangian
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = l(e,RT
s
Rs
, RT
s
X, RT
s
e3, R↵
, R'
, R↵
, R'
),
= l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
)
• From this, the reduced equations of motion are obtained onso(3)⇥O ⇥ TS1 ⇥ TS1 ⇥ TS1 primarily in terms of the reducedconstrained Lagrangian
l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
) = lc
(b!s
s
, b!s
s
�,�, R↵
, R'
, R↵
, R'
).
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Hamilton’s variational principle
�
Zt
1
t
0
l(!s
s
, Y ,�,↵,', ↵, ') dt = 0,
�Rs
= 0, �↵ = 0 and �' = 0 at t = t0 and t = t1
�b!s
s
= ⌘ + ad!
ss⌘ �Y = r ad
!
ss⌘�+ r
d
dt(b⌘�) �� = �b⌘�
b⌘ = RT
s
�Rs
is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Hamilton’s variational principle
�
Zt
1
t
0
l(!s
s
, Y ,�,↵,', ↵, ') dt = 0,
�Rs
= 0, �↵ = 0 and �' = 0 at t = t0 and t = t1
�b!s
s
= ⌘ + ad!
ss⌘ �Y = r ad
!
ss⌘�+ r
d
dt(b⌘�) �� = �b⌘�
b⌘ = RT
s
�Rs
is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Dynamics of spherical robot
d
dt
✓@l
c
@!s
s
◆�
✓@l
c
@!s
s
◆⇥ !s
s
= �✓
@l
@Y⇥ �
◆+
✓@l
@�⇥ �
◆,
d
dt
✓@l
@⇥
◆� @l
@⇥= 0,
� = � !!
s
s
⇥�.
The governing equation is calculated as
M(�)
"!!
s
s
⇥
#=
"ad⇤
!
ss
⇣@lc@!
ss
⌘
0
#+
0u
�.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
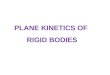
yoke
shell
pendulum
plane
Figure: Spherical Robot with internal pendulum mechanism
Configuration space
Q = SO(3)⇥ R2
| {z }group space
⇥ S1 ⇥ S1
| {z }shape space
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
o y
z
x
(xc
, yc
)
xs
zs
ys
'
yoke
Sphere
pendulum
↵
Figure: Coordinate frames for the system
Rolling Constraints
• x- velocity of the center of the sphere
x = (!s
)I ⇥ re3
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
L =12m
s
k!rs
k2 + 12hI !
!s
s
,!!
s
s
i| {z }
K.E.ofsphere
+mp
glhe3, Rs
R↵
R'
kp
i| {z }P.E.ofpendulum
+12m
p
k!rs
+ [Rs
!!
s
s
+Rs
R↵
(!!
↵
)Y +Rs
R↵
R'
(!!
'
)P ]⇥Rs
R↵
R'
kp
k2| {z }
K.E.ofpendulum
Rolling constraint:!rs
= (!!
s
)I ⇥ re3 =) !rs
= (b!s
)Ire3
Symmetry
• Left group action, G = SO(3)n R3 on manifold Q.
• Symmetry group Ge
3
= {(Rs
, b) 2 SO(3)n R3|RT
s
e3 = e3, hb, e3i =constant} = SO(2)n R2.
• The gravitational field breaks the symmetry of the system.
• Restriction of R3 to horizontal subspace R2 breaks the symmetry of thesystem.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
L =12m
s
k!rs
k2 + 12hI !
!s
s
,!!
s
s
i| {z }
K.E.ofsphere
+mp
glhe3, Rs
R↵
R'
kp
i| {z }P.E.ofpendulum
+12m
p
k!rs
+ [Rs
!!
s
s
+Rs
R↵
(!!
↵
)Y +Rs
R↵
R'
(!!
'
)P ]⇥Rs
R↵
R'
kp
k2| {z }
K.E.ofpendulum
Rolling constraint:!rs
= (!!
s
)I ⇥ re3 =) !rs
= (b!s
)Ire3
Symmetry
• Left group action, G = SO(3)n R3 on manifold Q.
• Symmetry group Ge
3
= {(Rs
, b) 2 SO(3)n R3|RT
s
e3 = e3, hb, e3i =constant} = SO(2)n R2.
• The gravitational field breaks the symmetry of the system.
• Restriction of R3 to horizontal subspace R2 breaks the symmetry of thesystem.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
L =12m
s
k!rs
k2 + 12hI !
!s
s
,!!
s
s
i| {z }
K.E.ofsphere
+mp
glhe3, Rs
R↵
R'
kp
i| {z }P.E.ofpendulum
+12m
p
k!rs
+ [Rs
!!
s
s
+Rs
R↵
(!!
↵
)Y +Rs
R↵
R'
(!!
'
)P ]⇥Rs
R↵
R'
kp
k2| {z }
K.E.ofpendulum
Rolling constraint:!rs
= (!!
s
)I ⇥ re3 =) !rs
= (b!s
)Ire3
Symmetry
• Left group action, G = SO(3)n R3 on manifold Q.
• Symmetry group Ge
3
= {(Rs
, b) 2 SO(3)n R3|RT
s
e3 = e3, hb, e3i =constant} = SO(2)n R2.
• The gravitational field breaks the symmetry of the system.
• Restriction of R3 to horizontal subspace R2 breaks the symmetry of thesystem.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
L =12m
s
k!rs
k2 + 12hI !
!s
s
,!!
s
s
i| {z }
K.E.ofsphere
+mp
glhe3, Rs
R↵
R'
kp
i| {z }P.E.ofpendulum
+12m
p
k!rs
+ [Rs
!!
s
s
+Rs
R↵
(!!
↵
)Y +Rs
R↵
R'
(!!
'
)P ]⇥Rs
R↵
R'
kp
k2| {z }
K.E.ofpendulum
Rolling constraint:!rs
= (!!
s
)I ⇥ re3 =) !rs
= (b!s
)Ire3
Symmetry
• Left group action, G = SO(3)n R3 on manifold Q.
• Symmetry group Ge
3
= {(Rs
, b) 2 SO(3)n R3|RT
s
e3 = e3, hb, e3i =constant} = SO(2)n R2.
• The gravitational field breaks the symmetry of the system.
• Restriction of R3 to horizontal subspace R2 breaks the symmetry of thesystem.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
L =12m
s
k!rs
k2 + 12hI !
!s
s
,!!
s
s
i| {z }
K.E.ofsphere
+mp
glhe3, Rs
R↵
R'
kp
i| {z }P.E.ofpendulum
+12m
p
k!rs
+ [Rs
!!
s
s
+Rs
R↵
(!!
↵
)Y +Rs
R↵
R'
(!!
'
)P ]⇥Rs
R↵
R'
kp
k2| {z }
K.E.ofpendulum
Rolling constraint:!rs
= (!!
s
)I ⇥ re3 =) !rs
= (b!s
)Ire3
Symmetry
• Left group action, G = SO(3)n R3 on manifold Q.
• Symmetry group Ge
3
= {(Rs
, b) 2 SO(3)n R3|RT
s
e3 = e3, hb, e3i =constant} = SO(2)n R2.
• The gravitational field breaks the symmetry of the system.
• Restriction of R3 to horizontal subspace R2 breaks the symmetry of thesystem.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
L =12m
s
k!rs
k2 + 12hI !
!s
s
,!!
s
s
i| {z }
K.E.ofsphere
+mp
glhe3, Rs
R↵
R'
kp
i| {z }P.E.ofpendulum
+12m
p
k!rs
+ [Rs
!!
s
s
+Rs
R↵
(!!
↵
)Y +Rs
R↵
R'
(!!
'
)P ]⇥Rs
R↵
R'
kp
k2| {z }
K.E.ofpendulum
Rolling constraint:!rs
= (!!
s
)I ⇥ re3 =) !rs
= (b!s
)Ire3
Symmetry
• Left group action, G = SO(3)n R3 on manifold Q.
• Symmetry group Ge
3
= {(Rs
, b) 2 SO(3)n R3|RT
s
e3 = e3, hb, e3i =constant} = SO(2)n R2.
• The gravitational field breaks the symmetry of the system.
• Restriction of R3 to horizontal subspace R2 breaks the symmetry of thesystem.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Lagrangian
L =12m
s
k!rs
k2 + 12hI !
!s
s
,!!
s
s
i| {z }
K.E.ofsphere
+mp
glhe3, Rs
R↵
R'
kp
i| {z }P.E.ofpendulum
+12m
p
k!rs
+ [Rs
!!
s
s
+Rs
R↵
(!!
↵
)Y +Rs
R↵
R'
(!!
'
)P ]⇥Rs
R↵
R'
kp
k2| {z }
K.E.ofpendulum
Rolling constraint:!rs
= (!!
s
)I ⇥ re3 =) !rs
= (b!s
)Ire3
Symmetry
• Left group action, G = SO(3)n R3 on manifold Q.
• Symmetry group Ge
3
= {(Rs
, b) 2 SO(3)n R3|RT
s
e3 = e3, hb, e3i =constant} = SO(2)n R2.
• The gravitational field breaks the symmetry of the system.
• Restriction of R3 to horizontal subspace R2 breaks the symmetry of thesystem.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduced Lagrangian
L : T (SO(3)⇥ R2 ⇥ S1 ⇥ S1) �! R
l : se(3)⇥O ⇥ S1 ⇥ S1 �! R
lc
: so(3)⇥O ⇥ S1 ⇥ S1 �! R
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = l(e,RT
s
Rs
, RT
s
X, RT
s
e3, R↵
, R'
, R↵
, R'
),
= l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
),
= lc
(b!s
s
, b!s
s
�,�, R↵
, R'
, R↵
, R'
).
Hamilton’s variational principle
�
Zt
1
t
0
l(!s
s
, Y ,�,↵,', ↵, ') dt = 0,
�Rs
= 0, �↵ = 0 and �' = 0 at t = t0 and t = t1
�b!s
s
= ⌘ + ad!
ss⌘ �Y = r ad
!
ss⌘�+ r
d
dt(b⌘�) �� = �b⌘�
b⌘ = RT
s
�Rs
is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduced Lagrangian
L : T (SO(3)⇥ R2 ⇥ S1 ⇥ S1) �! R
l : se(3)⇥O ⇥ S1 ⇥ S1 �! R
lc
: so(3)⇥O ⇥ S1 ⇥ S1 �! R
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = l(e,RT
s
Rs
, RT
s
X, RT
s
e3, R↵
, R'
, R↵
, R'
),
= l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
),
= lc
(b!s
s
, b!s
s
�,�, R↵
, R'
, R↵
, R'
).
Hamilton’s variational principle
�
Zt
1
t
0
l(!s
s
, Y ,�,↵,', ↵, ') dt = 0,
�Rs
= 0, �↵ = 0 and �' = 0 at t = t0 and t = t1
�b!s
s
= ⌘ + ad!
ss⌘ �Y = r ad
!
ss⌘�+ r
d
dt(b⌘�) �� = �b⌘�
b⌘ = RT
s
�Rs
is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduced Lagrangian
L : T (SO(3)⇥ R2 ⇥ S1 ⇥ S1) �! R
l : se(3)⇥O ⇥ S1 ⇥ S1 �! R
lc
: so(3)⇥O ⇥ S1 ⇥ S1 �! R
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = l(e,RT
s
Rs
, RT
s
X, RT
s
e3, R↵
, R'
, R↵
, R'
),
= l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
),
= lc
(b!s
s
, b!s
s
�,�, R↵
, R'
, R↵
, R'
).
Hamilton’s variational principle
�
Zt
1
t
0
l(!s
s
, Y ,�,↵,', ↵, ') dt = 0,
�Rs
= 0, �↵ = 0 and �' = 0 at t = t0 and t = t1
�b!s
s
= ⌘ + ad!
ss⌘ �Y = r ad
!
ss⌘�+ r
d
dt(b⌘�) �� = �b⌘�
b⌘ = RT
s
�Rs
is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
Reduced Lagrangian
L : T (SO(3)⇥ R2 ⇥ S1 ⇥ S1) �! R
l : se(3)⇥O ⇥ S1 ⇥ S1 �! R
lc
: so(3)⇥O ⇥ S1 ⇥ S1 �! R
L(Rs
, e3, Rs
, X, R↵
, R'
, R↵
, R'
) = l(e,RT
s
Rs
, RT
s
X, RT
s
e3, R↵
, R'
, R↵
, R'
),
= l(b!s
s
, Y ,�, R↵
, R'
, R↵
, R'
),
= lc
(b!s
s
, b!s
s
�,�, R↵
, R'
, R↵
, R'
).
Hamilton’s variational principle
�
Zt
1
t
0
l(!s
s
, Y ,�,↵,', ↵, ') dt = 0,
�Rs
= 0, �↵ = 0 and �' = 0 at t = t0 and t = t1
�b!s
s
= ⌘ + ad!
ss⌘ �Y = r ad
!
ss⌘�+ r
d
dt(b⌘�) �� = �b⌘�
b⌘ = RT
s
�Rs
is a variation vanishing at endpoints ⌘(t0) = ⌘(t1) = 0February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
The dynamic equation
• d
dt
⇣@lc@!
ss
⌘� ad⇤
!
ss
⇣@lc@!
ss
⌘= �
⇣@l
@Y
⇥ �⌘+
�@l
@�⇥ �
�,
d
dt
�@l
@↵
�� @l
@↵
= 0,d
dt
⇣@l
@'
⌘� @l
@'
= 0,
� = � !!
s
s
⇥�.
• Computing the derivatives, we get
M(�,↵,')
2
64
!!
s
s
↵'
3
75 =� d
dt(M(�,↵,'))
2
4!!
s
s
↵'
3
5+
2
64ad⇤
!
ss
⇣@lc@!
ss
⌘
@T (�,↵,')@↵
@T (�,↵,')@'
3
75
+
2
64
@l
��⇥ �
� @V (�,↵,')@↵
� @V (�,↵,')@'
3
75+
2
4� �
@l
@Y
�⇥ �00
3
5+
2
40⌧↵
⌧'
3
5 .
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
The dynamic equation
• d
dt
⇣@lc@!
ss
⌘� ad⇤
!
ss
⇣@lc@!
ss
⌘= �
⇣@l
@Y
⇥ �⌘+
�@l
@�⇥ �
�,
d
dt
�@l
@↵
�� @l
@↵
= 0,d
dt
⇣@l
@'
⌘� @l
@'
= 0,
� = � !!
s
s
⇥�.
• Computing the derivatives, we get
M(�,↵,')
2
64
!!
s
s
↵'
3
75 =� d
dt(M(�,↵,'))
2
4!!
s
s
↵'
3
5+
2
64ad⇤
!
ss
⇣@lc@!
ss
⌘
@T (�,↵,')@↵
@T (�,↵,')@'
3
75
+
2
64
@l
��⇥ �
� @V (�,↵,')@↵
� @V (�,↵,')@'
3
75+
2
4� �
@l
@Y
�⇥ �00
3
5+
2
40⌧↵
⌧'
3
5 .
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
The dynamic equation
• d
dt
⇣@lc@!
ss
⌘� ad⇤
!
ss
⇣@lc@!
ss
⌘= �
⇣@l
@Y
⇥ �⌘+
�@l
@�⇥ �
�,
d
dt
�@l
@↵
�� @l
@↵
= 0,d
dt
⇣@l
@'
⌘� @l
@'
= 0,
� = � !!
s
s
⇥�.
• Computing the derivatives, we get
M(�,↵,')
2
64
!!
s
s
↵'
3
75 =� d
dt(M(�,↵,'))
2
4!!
s
s
↵'
3
5+
2
64ad⇤
!
ss
⇣@lc@!
ss
⌘
@T (�,↵,')@↵
@T (�,↵,')@'
3
75
+
2
64
@l
��⇥ �
� @V (�,↵,')@↵
� @V (�,↵,')@'
3
75+
2
4� �
@l
@Y
�⇥ �00
3
5+
2
40⌧↵
⌧'
3
5 .
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
References I
D. D. Holm, T. Schmah and C. Stoica.Geometric Mechanics and Symmetry.Oxford University Press Inc., New York, 2009.
J. E. Marsden and T. S. Ratiu.Introduction to Mechanics and Symmetry.Springer-Verlag, New York, 1994.
A. D. Lewis and F. Bullo.Geometric Control of Mechanical Systems.Springer-Verlag, New York, 2005.
C, D Eui, and J. E. Marsden.Asymptotic stabilization of the heavy top using controlledLagrangians.In Proc. Conference on Decision and Control(2000): 269-273.
D. D. Holm, J. E. Marsden, and T. S. Ratiu.The Euler-poincare equations and semidirect products withapplications to continuum theories.Advances in Mathematics, volume 137,1998.
February, 2016 STC-IISc Workshop

Rigid body dynamics Symmetry breaking potentials Rolling constraints
References II
D. Schneider.Non-holonomic Euler-Poincare equations and stability in Chaplygin’ssphere.Dynamical Systems, pages 87-130, 2002.
Gajbhiye, S and Banavar, R N.The Euler-Poincare equations for a spherical robot actuated by apendulum.Proceedings of the 4th IFAC Workshop on Lagrangian and Hamiltonianmethods for Non-Linear Control, pages 72-77, 2012.
February, 2016 STC-IISc Workshop