Embed Size (px)
Citation preview

Recortar: Arriba: 61,5 mm Abajo: 61,5 mm Izquierda: 43,5 mm Derecha: 43,5 mm
Controlador
Descripción Interface PLC Tipo CMXR-C1
Descripción 560 329 es 0909a [748 999]

Festo GDCP-CMXR-F-ES 0909a 3
Edición _______________________________________ es 0909a
Designación _______________________________________ GDCP-CMXR-F
(Festo AG & Co KG., D-73726 Esslingen, 2009)
Internet: http://www.festo.com
E-mail: [email protected]
Sin nuestra expresa autorización, queda terminantemente prohibida la reproducción total o parcial de este documento, así como su uso indebido y/o su exhibición o comunicación a terceros. El incumplimiento de lo anterior obliga al pago de indemnización por daños y perjuicios. Quedan reservados todos los derechos inherentes, en especial los de patentes, de modelos registrados y estéticos.
Festo GDCP-CMXR-F-ES 0909a 4
Lista de revisiones
Autor:
Nombre del manual: GDCP-CMXR-F
Nombre del archivo:
Lugar de almacenamiento del
archivo:
Nº de art. Descripción Indicador de revisión Fecha de modificación
001 Redacción es 0805NH 09.07.08
002 Revisión es 0909ª 02.09.09
Marcas comerciales
Microsoft® Windows® Marca registrada de Microsoft Corporation
PROFIBUS, PROFIBUS–DP® Marcas registradas de PROFIBUS International (P.I.)
ÍNDICE
Festo GDCP-CMXR-F-ES 0909a 5
1 Generalidades ....................................................................................................... 7
1.1 Documentación adicional sobre el control multieje CMXR-C1 ............................... 7
1.2 Destinatarios ....................................................................................................... 7
1.3 Asistencia técnica ................................................................................................ 8
2 Medidas de seguridad........................................................................................... 9
2.1 Medidas de seguridad para la manipulación ........................................................ 9
2.2 Indicaciones de seguridad para la planificación ................................................. 10
2.3 Indicaciones de seguridad para el mantenimiento ............................................. 11
2.4 Delimitación ...................................................................................................... 11
3 Interfaces de control para el control externo ...................................................... 12
4 Interface PLC MCP1 ............................................................................................. 13
4.1 Informaciones generales .................................................................................... 13
4.2 Control a través de E/S digitales ........................................................................ 13
4.3 Control mediante PROFIBUS .............................................................................. 16
4.3.1 Tarjeta E/S BasicIO (opcional) ............................................................ 16
4.3.2 Señales de mando en el conjunto de datos PROFIBUS ........................ 17
4.3.3 Señales de estado en el conjunto de datos PROFIBUS ........................ 19
4.4 Funcionamiento de la interface PLC MCP1 .......................................................... 21
4.4.1 Watchdog ........................................................................................... 21
4.4.2 Error activo ......................................................................................... 21
4.4.3 Sistema de comunicación ................................................................... 21
4.4.4 Clases y números de mensaje en MCP1 .............................................. 21
4.4.5 Acuse de recibo de errores ................................................................. 22
4.4.6 Solicitación de control de nivel superior ............................................. 23
4.4.7 Conexión de actuadores ..................................................................... 23
4.4.8 Pausa programada ............................................................................. 24
4.4.9 Desplazamiento JOG ........................................................................... 24
4.4.10 Selección del modo de funcionamiento .............................................. 26
4.4.11 Carga del programa ............................................................................ 26
4.4.12 Descarga del programa ...................................................................... 30
4.4.13 Inicio del programa ............................................................................ 31
4.4.14 Parada del programa .......................................................................... 32
4.4.15 Programas paralelos .......................................................................... 33
4.4.16 Override ............................................................................................. 33
4.4.17 Intercambio de datos cíclicos E/S ....................................................... 34
5 Interface PLC MCP 2 ............................................................................................ 35
5.1 MCP2-PB ........................................................................................................... 35
5.1.1 Señales de mando .............................................................................. 35
ÍNDICE
6 Festo GDCP-CMXR-F-ES 0909a
5.1.2 Señales de estado .............................................................................. 35
5.2 Funcionamiento de la interface PLC MCP2 .......................................................... 36
5.3 Códigos de función ............................................................................................ 38
5.3.1 Valores de retorno .............................................................................. 38
6 Variables de comunicación.................................................................................. 39
6.1 Variables de posición ........................................................................................ 39
6.1.1 Acceso desde el programa de robot .................................................... 39
6.1.2 Formato de interface .......................................................................... 39
6.2 Variables del sistema de referencia ................................................................... 40
6.2.1 Acceso desde el programa de robot .................................................... 40
6.2.2 Formato de interface .......................................................................... 40
6.3 Variables de palabra .......................................................................................... 40
6.3.1 Acceso desde el programa de robot .................................................... 40
6.3.2 Formato de interface .......................................................................... 41
1. Generalidades
Festo GDCP-CMXR-F-ES 0909a 7
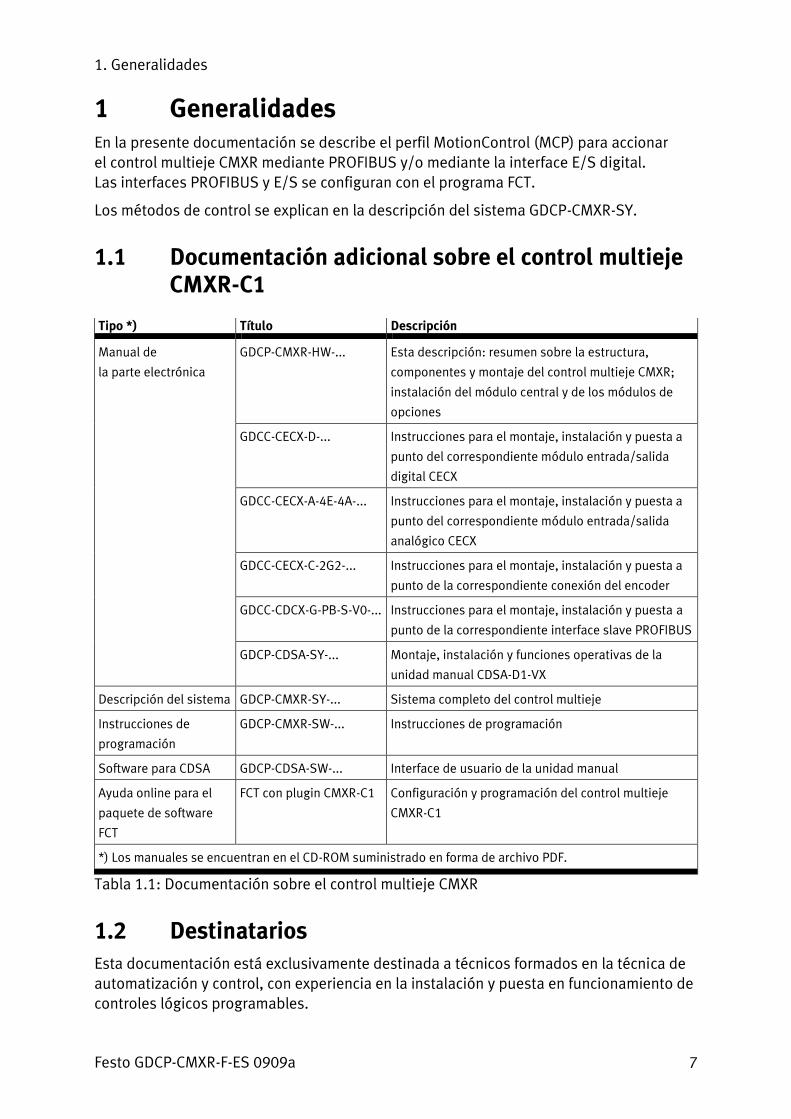
1 Generalidades En la presente documentación se describe el perfil MotionControl (MCP) para accionar el control multieje CMXR mediante PROFIBUS y/o mediante la interface E/S digital. Las interfaces PROFIBUS y E/S se configuran con el programa FCT.
Los métodos de control se explican en la descripción del sistema GDCP-CMXR-SY.
1.1 Documentación adicional sobre el control multieje CMXR-C1
Tipo *) Título Descripción
Manual de
la parte electrónica
GDCP-CMXR-HW-... Esta descripción: resumen sobre la estructura,
componentes y montaje del control multieje CMXR;
instalación del módulo central y de los módulos de
opciones
GDCC-CECX-D-... Instrucciones para el montaje, instalación y puesta a
punto del correspondiente módulo entrada/salida
digital CECX
GDCC-CECX-A-4E-4A-... Instrucciones para el montaje, instalación y puesta a
punto del correspondiente módulo entrada/salida
analógico CECX
GDCC-CECX-C-2G2-... Instrucciones para el montaje, instalación y puesta a
punto de la correspondiente conexión del encoder
GDCC-CDCX-G-PB-S-V0-... Instrucciones para el montaje, instalación y puesta a
punto de la correspondiente interface slave PROFIBUS
GDCP-CDSA-SY-... Montaje, instalación y funciones operativas de la
unidad manual CDSA-D1-VX
Descripción del sistema GDCP-CMXR-SY-... Sistema completo del control multieje
Instrucciones de
programación
GDCP-CMXR-SW-... Instrucciones de programación
Software para CDSA GDCP-CDSA-SW-... Interface de usuario de la unidad manual
Ayuda online para el
paquete de software
FCT
FCT con plugin CMXR-C1 Configuración y programación del control multieje
CMXR-C1
*) Los manuales se encuentran en el CD-ROM suministrado en forma de archivo PDF.
Tabla 1.1: Documentación sobre el control multieje CMXR
1.2 Destinatarios
Esta documentación está exclusivamente destinada a técnicos formados en la técnica de automatización y control, con experiencia en la instalación y puesta en funcionamiento de controles lógicos programables.

1. Generalidades
8 Festo GDCP-CMXR-F-ES 0909a
1.3 Asistencia técnica
Ante cualquier problema técnico, diríjase a su servicio local de asistencia técnica de Festo.
2. Medidas de seguridad
Festo GDCP-CMXR-F-ES 0909a 9
2 Medidas de seguridad La documentación incluye la información que necesitan el usuario y el programador para accionar el control multieje CMXR.
Únicamente el personal cualificado dispone de los conocimientos técnicos necesarios para interpretar y aplicar correctamente las instrucciones incluidas en dicha documentación.
La documentación no puede abarcar todos los casos posibles de aplicación. Si precisa más información, solicítela a la sucursal de Festo más próxima.
Observe la documentación correspondiente de su control multieje durante la instalación, la puesta a punto y el mantenimiento.
Los documentos están dirigidos a personal cualificado. Éste incluye a toda persona con
los conocimientos adecuados en el ámbito de actividad correspondiente en el campo de
la técnica de automatización.
2.1 Medidas de seguridad para la manipulación
Los subconjuntos utilizados en el sistema son sensibles a las descargas electrostáticas cuando se encuentran desmontados.
Atención
Una manipulación inadecuada puede dañar los subconjuntos y los módulos.
No toque los componentes. Observe las especificaciones sobre manipulación de
elementos sensibles a las descargas electrostáticas.
Para proteger los subconjuntos contra descargas de electricidad estática: descargue la electricidad estática de su cuerpo antes de montar o desmontar los módulos.
Atención
Destrucción de los módulos y daños en la unidad central CMXR-C1.
Desconecte primero la tensión de alimentación antes de montar o desmontar los módulos.
Monte el equipo en un armario de maniobra adecuado.
Atención
Una intervención llevada a cabo por personal no cualificado en el control multieje puede provocar un comportamiento erróneo de la máquina o de la instalación y provocar lesiones físicas o daños materiales.
Asegúrese de que únicamente intervenga personal debidamente cualificado en el sistema de mando modular.
2. Medidas de seguridad
10 Festo GDCP-CMXR-F-ES 0909a
2.2 Indicaciones de seguridad para la planificación
Atención
Una intervención llevada a cabo por personal no cualificado en el control multieje puede provocar un comportamiento erróneo de la máquina o de la instalación y provocar lesiones físicas o daños materiales.
Observe las indicaciones siguientes:
- Observe las medidas de seguridad de la documentación que acompaña a su control multieje.
- Debe seguir siempre escrupulosamente las instrucciones incluidas en la documentación. Si no, pueden surgir peligros o resultar ineficaces los
dispositivos de seguridad integrados en el control multieje.
- Además de las medidas de seguridad incluidas en dichos manuales, hay que observar las correspondientes normas de seguridad y de prevención de accidentes aplicables en cada caso.
- Realice la alimentación de la tensión de carga y de servicio en un circuito eléctrico con energía limitada conforme a la norma IEC/DIN/EN 61131–2 y cuide siempre de que haya un fusible de un máx. de 10 A.
- La alimentación de 24 V de los equipos debe garantizarse separando de manera segura la tensión de bajo voltaje de las tensiones peligrosas de alto voltaje.
- Se tomarán las precauciones necesarias para que pueda restablecerse debida-mente cualquier programa interrumpido tras los fallos de tensión. En tales
casos no debe producirse en ningún momento, ni siquiera brevemente, ningún estado operativo que implique peligro.
- Los equipos de parada de emergencia deben mantener su eficacia en todos los modos de funcionamiento del dispositivo de automatización. El desbloqueo del equipo de parada de emergencia no debe provocar ningún rearranque incontrolado.
- Y sobre todo, cuando los fallos que se pudieran producir en el sistema de mando conlleven el riesgo de lesiones físicas o grandes daños materiales, habrá que adoptar las medidas externas adicionales que garanticen un estado operativo seguro de todo el sistema, aun en caso de fallo.
2. Medidas de seguridad
Festo GDCP-CMXR-F-ES 0909a 11
2.3 Indicaciones de seguridad para el mantenimiento
Atención
Toda intervención no cualificada puede provocar lesiones físicas o daños materiales.
Observe que el equipo sólo pueda ser abierto por personal técnico cualificado y que sólo se efectúen los trabajos de mantenimiento permitidos expresamente por Festo (véase la sección “Indicaciones de mantenimiento””).
Antes de abrir el equipo:
1. Interrumpa la alimentación de corriente y
2. Desenchufe las conexiones de interfaces.
2.4 Delimitación
Este documento está concebido para los usuarios y programadores del control multieje CMXR.
Advertencia
El control multieje CMXR-C1 no está diseñado para problemas de control relevantes para la seguridad (p. ej., parada en caso de emergencia o control de velocidades reducidas).
Advertencia
Conforme a EN ISO 13849, el control multieje CMXR-C1 es sólo de categoría B y, por tanto, no es suficiente para realizar funciones de seguridad de protección del personal.
Advertencia
Para problemas de control relativos a la seguridad o para la seguridad de las personas deberán aplicarse medidas de pro-tección externas que garanticen un estado operativo seguro del sistema completo, incluso en caso de fallo.
3. Interfaces de control para el control externo
12 Festo GDCP-CMXR-F-ES 0909a
3 Interfaces de control para el control externo El control multieje CMXR puede funcionar con tres métodos de control y la unidad manual CDSA-D1-VX puede estar conectada estando seleccionado cualquiera de ellos:
- Funcionamiento sin control externo (descripción no incluida aquí; véase el manual del sistema).
- Control a través de un sistema de mando de nivel superior mediante entradas y salidas digitales con el perfil MotionControl MPC1-EA.
- Control a través de un sistema de mando de nivel superior mediante PROFIBUS DP en 2 clases de rendimiento: - Perfil MotionControl MPC1-PB con conjunto de datos de 12 bytes. - Perfil MotionControl MPC2-PB con conjunto de datos de 64 bytes.
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 13
4 Interface PLC MCP1
4.1 Informaciones generales
La comunicación con la interface PLC puede establecerse mediante PROFIBUS o mediante una variante más sencilla a través de E/S digitales. Consulte el manual del sistema para realizar los ajustes necesarios.
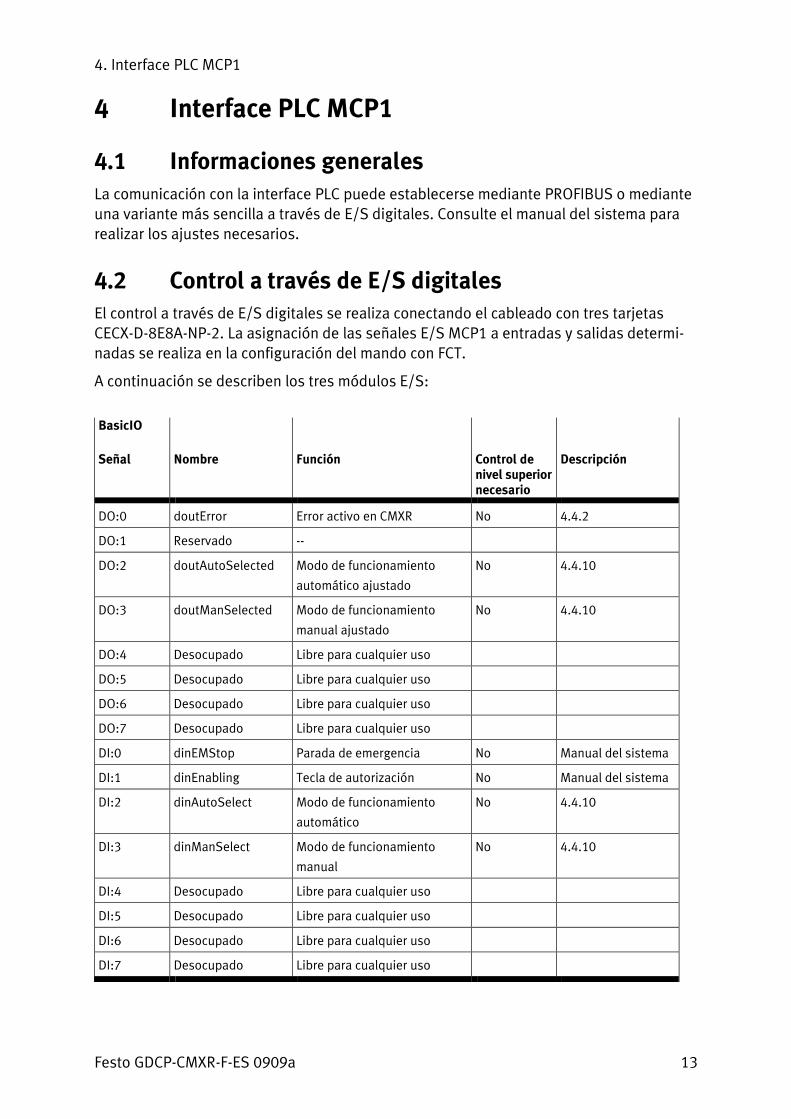
4.2 Control a través de E/S digitales
El control a través de E/S digitales se realiza conectando el cableado con tres tarjetas CECX-D-8E8A-NP-2. La asignación de las señales E/S MCP1 a entradas y salidas determi-nadas se realiza en la configuración del mando con FCT.
A continuación se describen los tres módulos E/S:
BasicIO
Señal
Nombre
Función
Control de nivel superior necesario
Descripción
DO:0 doutError Error activo en CMXR No 4.4.2
DO:1 Reservado --
DO:2 doutAutoSelected Modo de funcionamiento
automático ajustado
No 4.4.10
DO:3 doutManSelected Modo de funcionamiento
manual ajustado
No 4.4.10
DO:4 Desocupado Libre para cualquier uso
DO:5 Desocupado Libre para cualquier uso
DO:6 Desocupado Libre para cualquier uso
DO:7 Desocupado Libre para cualquier uso
DI:0 dinEMStop Parada de emergencia No Manual del sistema
DI:1 dinEnabling Tecla de autorización No Manual del sistema
DI:2 dinAutoSelect Modo de funcionamiento
automático
No 4.4.10
DI:3 dinManSelect Modo de funcionamiento
manual
No 4.4.10
DI:4 Desocupado Libre para cualquier uso
DI:5 Desocupado Libre para cualquier uso
DI:6 Desocupado Libre para cualquier uso
DI:7 Desocupado Libre para cualquier uso
4. Interface PLC MCP1
14 Festo GDCP-CMXR-F-ES 0909a
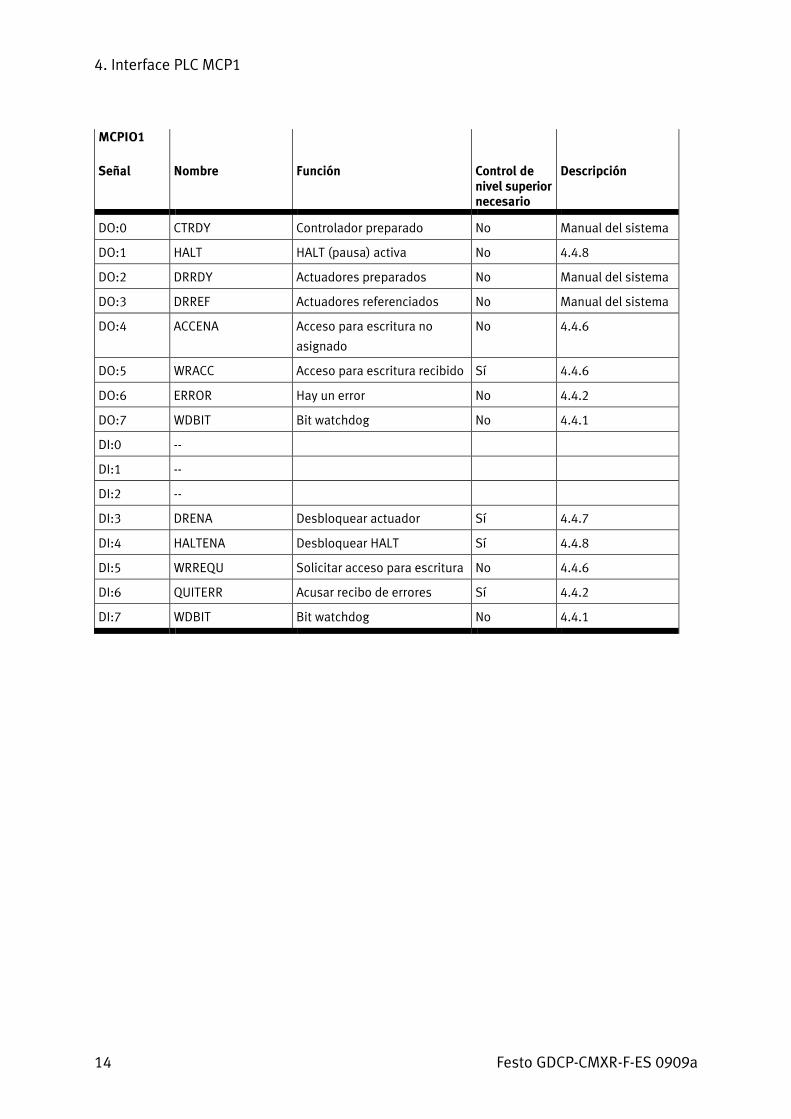
MCPIO1
Señal
Nombre
Función
Control de nivel superior necesario
Descripción
DO:0 CTRDY Controlador preparado No Manual del sistema
DO:1 HALT HALT (pausa) activa No 4.4.8
DO:2 DRRDY Actuadores preparados No Manual del sistema
DO:3 DRREF Actuadores referenciados No Manual del sistema
DO:4 ACCENA Acceso para escritura no
asignado
No 4.4.6
DO:5 WRACC Acceso para escritura recibido Sí 4.4.6
DO:6 ERROR Hay un error No 4.4.2
DO:7 WDBIT Bit watchdog No 4.4.1
DI:0 --
DI:1 --
DI:2 --
DI:3 DRENA Desbloquear actuador Sí 4.4.7
DI:4 HALTENA Desbloquear HALT Sí 4.4.8
DI:5 WRREQU Solicitar acceso para escritura No 4.4.6
DI:6 QUITERR Acusar recibo de errores Sí 4.4.2
DI:7 WDBIT Bit watchdog No 4.4.1
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 15
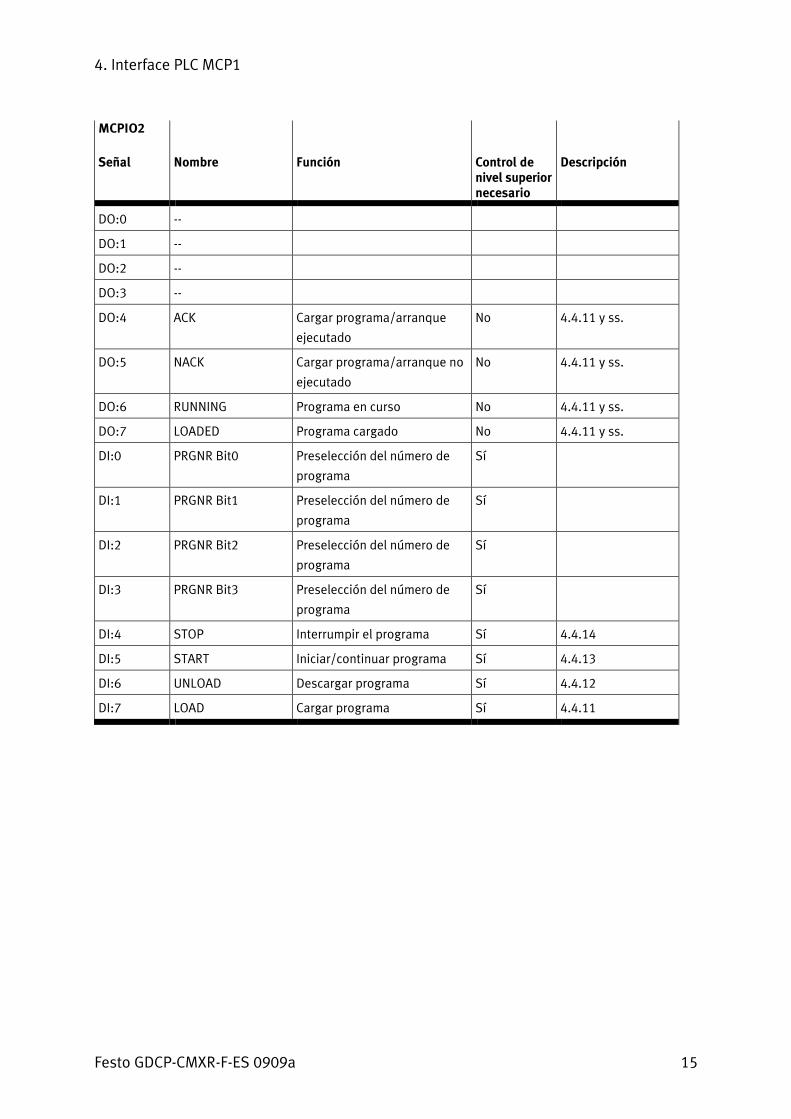
MCPIO2
Señal
Nombre
Función
Control de nivel superior necesario
Descripción
DO:0 --
DO:1 --
DO:2 --
DO:3 --
DO:4 ACK Cargar programa/arranque
ejecutado
No 4.4.11 y ss.
DO:5 NACK Cargar programa/arranque no
ejecutado
No 4.4.11 y ss.
DO:6 RUNNING Programa en curso No 4.4.11 y ss.
DO:7 LOADED Programa cargado No 4.4.11 y ss.
DI:0 PRGNR Bit0 Preselección del número de
programa
Sí
DI:1 PRGNR Bit1 Preselección del número de
programa
Sí
DI:2 PRGNR Bit2 Preselección del número de
programa
Sí
DI:3 PRGNR Bit3 Preselección del número de
programa
Sí
DI:4 STOP Interrumpir el programa Sí 4.4.14
DI:5 START Iniciar/continuar programa Sí 4.4.13
DI:6 UNLOAD Descargar programa Sí 4.4.12
DI:7 LOAD Cargar programa Sí 4.4.11
4. Interface PLC MCP1
16 Festo GDCP-CMXR-F-ES 0909a
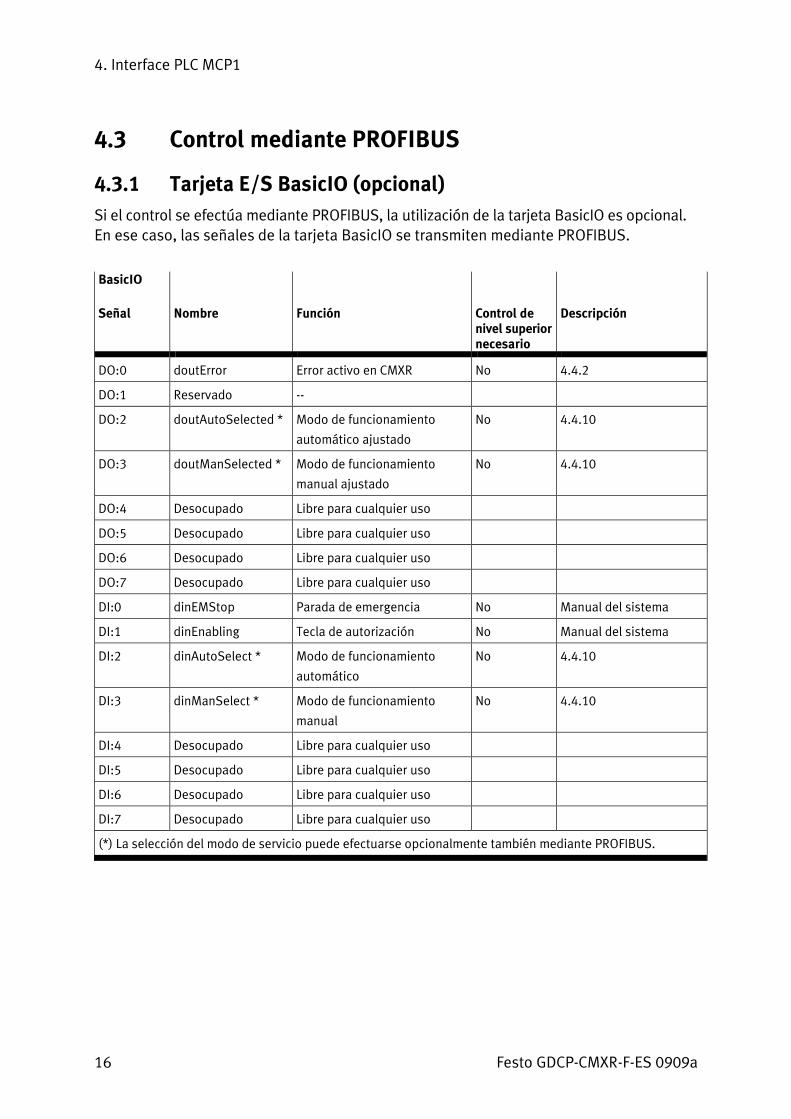
4.3 Control mediante PROFIBUS
4.3.1 Tarjeta E/S BasicIO (opcional)
Si el control se efectúa mediante PROFIBUS, la utilización de la tarjeta BasicIO es opcional. En ese caso, las señales de la tarjeta BasicIO se transmiten mediante PROFIBUS.
BasicIO
Señal
Nombre
Función
Control de nivel superior necesario
Descripción
DO:0 doutError Error activo en CMXR No 4.4.2
DO:1 Reservado --
DO:2 doutAutoSelected * Modo de funcionamiento
automático ajustado
No 4.4.10
DO:3 doutManSelected * Modo de funcionamiento
manual ajustado
No 4.4.10
DO:4 Desocupado Libre para cualquier uso
DO:5 Desocupado Libre para cualquier uso
DO:6 Desocupado Libre para cualquier uso
DO:7 Desocupado Libre para cualquier uso
DI:0 dinEMStop Parada de emergencia No Manual del sistema
DI:1 dinEnabling Tecla de autorización No Manual del sistema
DI:2 dinAutoSelect * Modo de funcionamiento
automático
No 4.4.10
DI:3 dinManSelect * Modo de funcionamiento
manual
No 4.4.10
DI:4 Desocupado Libre para cualquier uso
DI:5 Desocupado Libre para cualquier uso
DI:6 Desocupado Libre para cualquier uso
DI:7 Desocupado Libre para cualquier uso
(*) La selección del modo de servicio puede efectuarse opcionalmente también mediante PROFIBUS.
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 17
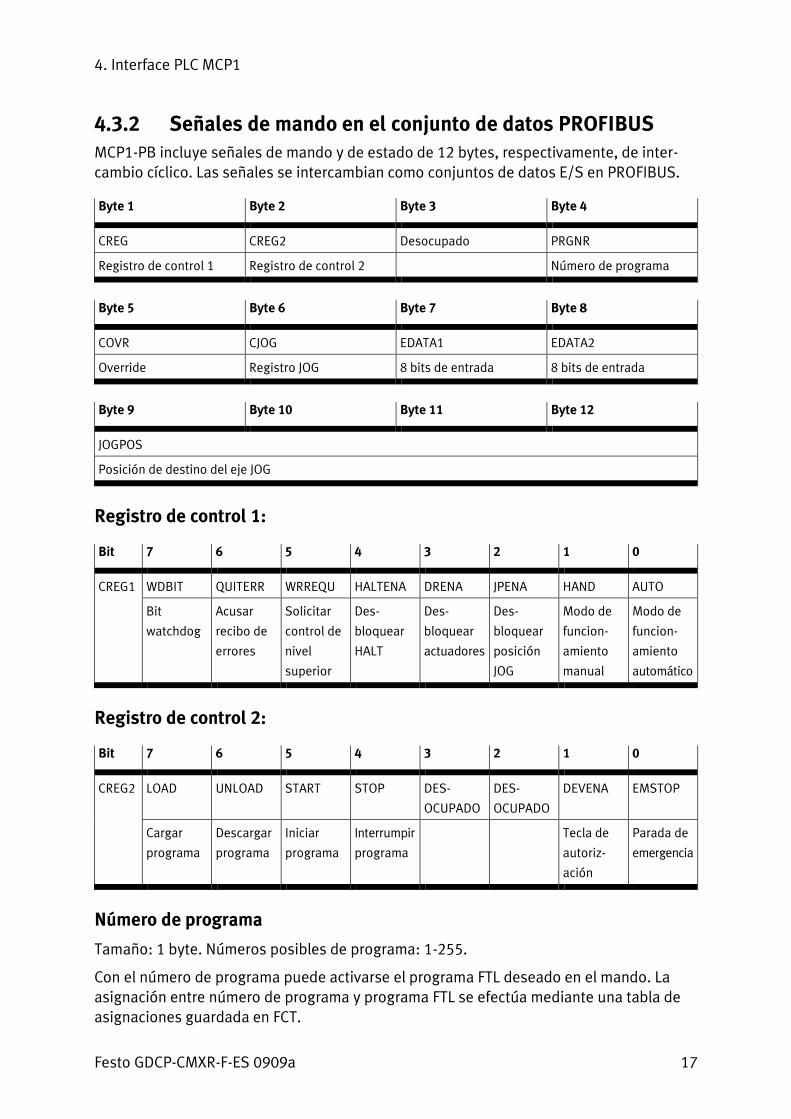
4.3.2 Señales de mando en el conjunto de datos PROFIBUS
MCP1-PB incluye señales de mando y de estado de 12 bytes, respectivamente, de inter-cambio cíclico. Las señales se intercambian como conjuntos de datos E/S en PROFIBUS.
Byte 1 Byte 2 Byte 3 Byte 4
CREG CREG2 Desocupado PRGNR
Registro de control 1 Registro de control 2 Número de programa
Byte 5 Byte 6 Byte 7 Byte 8
COVR CJOG EDATA1 EDATA2
Override Registro JOG 8 bits de entrada 8 bits de entrada
Byte 9 Byte 10 Byte 11 Byte 12
JOGPOS
Posición de destino del eje JOG
Registro de control 1:
Bit 7 6 5 4 3 2 1 0
CREG1 WDBIT QUITERR WRREQU HALTENA DRENA JPENA HAND AUTO
Bit
watchdog
Acusar
recibo de
errores
Solicitar
control de
nivel
superior
Des-
bloquear
HALT
Des-
bloquear
actuadores
Des-
bloquear
posición
JOG
Modo de
funcion-
amiento
manual
Modo de
funcion-
amiento
automático
Registro de control 2:
Bit 7 6 5 4 3 2 1 0
CREG2 LOAD UNLOAD START STOP DES-
OCUPADO
DES-
OCUPADO
DEVENA EMSTOP
Cargar
programa
Descargar
programa
Iniciar
programa
Interrumpir
programa
Tecla de
autoriz-
ación
Parada de
emergencia
Número de programa
Tamaño: 1 byte. Números posibles de programa: 1-255.
Con el número de programa puede activarse el programa FTL deseado en el mando. La asignación entre número de programa y programa FTL se efectúa mediante una tabla de asignaciones guardada en FCT.
4. Interface PLC MCP1
18 Festo GDCP-CMXR-F-ES 0909a
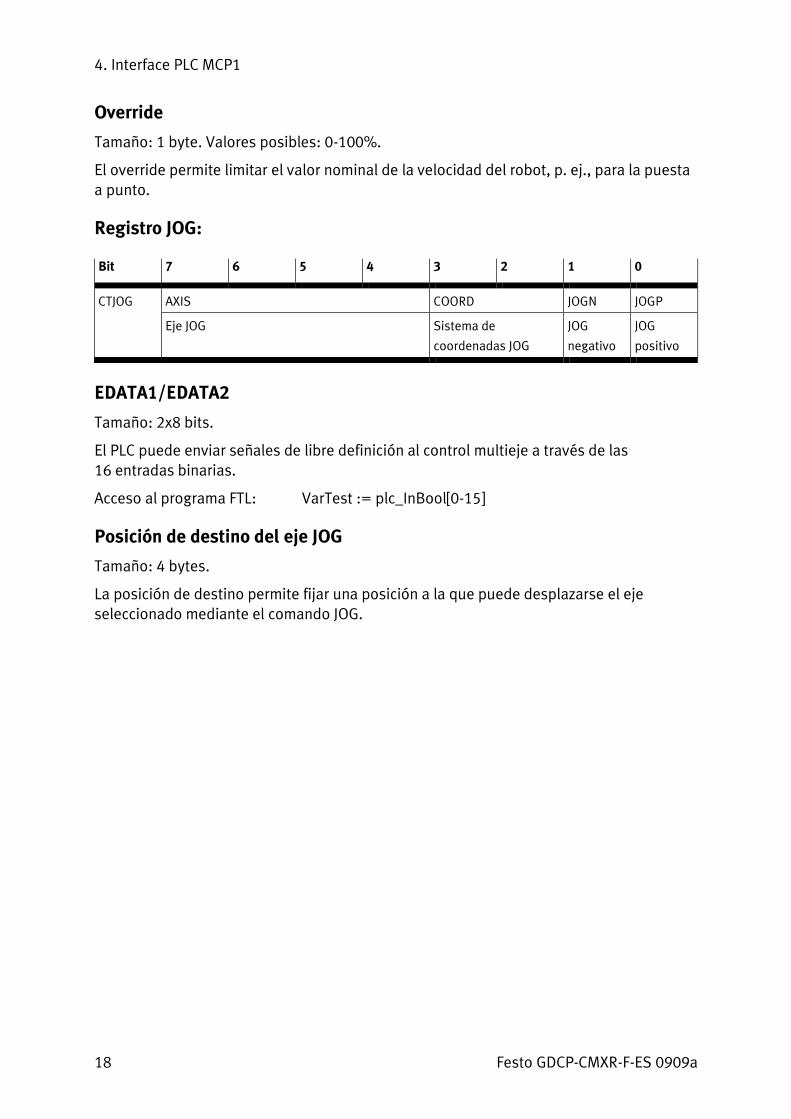
Override
Tamaño: 1 byte. Valores posibles: 0-100%.
El override permite limitar el valor nominal de la velocidad del robot, p. ej., para la puesta a punto.
Registro JOG:
Bit 7 6 5 4 3 2 1 0
CTJOG AXIS COORD JOGN JOGP
Eje JOG Sistema de
coordenadas JOG
JOG
negativo
JOG
positivo
EDATA1/EDATA2
Tamaño: 2x8 bits.
El PLC puede enviar señales de libre definición al control multieje a través de las 16 entradas binarias.
Acceso al programa FTL: VarTest := plc_InBool[0-15]
Posición de destino del eje JOG
Tamaño: 4 bytes.
La posición de destino permite fijar una posición a la que puede desplazarse el eje seleccionado mediante el comando JOG.
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 19
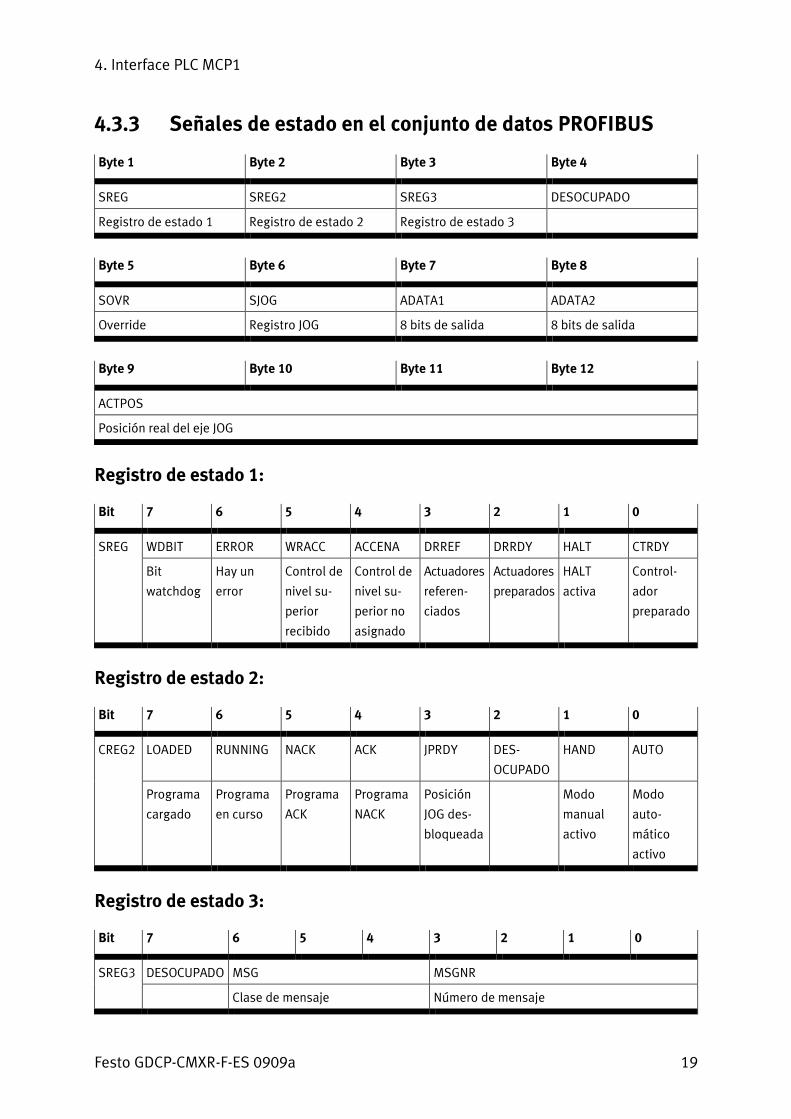
4.3.3 Señales de estado en el conjunto de datos PROFIBUS
Byte 1 Byte 2 Byte 3 Byte 4
SREG SREG2 SREG3 DESOCUPADO
Registro de estado 1 Registro de estado 2 Registro de estado 3
Byte 5 Byte 6 Byte 7 Byte 8
SOVR SJOG ADATA1 ADATA2
Override Registro JOG 8 bits de salida 8 bits de salida
Byte 9 Byte 10 Byte 11 Byte 12
ACTPOS
Posición real del eje JOG
Registro de estado 1:
Bit 7 6 5 4 3 2 1 0
SREG WDBIT ERROR WRACC ACCENA DRREF DRRDY HALT CTRDY
Bit
watchdog
Hay un
error
Control de
nivel su-
perior
recibido
Control de
nivel su-
perior no
asignado
Actuadores
referen-
ciados
Actuadores
preparados
HALT
activa
Control-
ador
preparado
Registro de estado 2:
Bit 7 6 5 4 3 2 1 0
CREG2 LOADED RUNNING NACK ACK JPRDY DES-
OCUPADO
HAND AUTO
Programa
cargado
Programa
en curso
Programa
ACK
Programa
NACK
Posición
JOG des-
bloqueada
Modo
manual
activo
Modo
auto-
mático
activo
Registro de estado 3:
Bit 7 6 5 4 3 2 1 0
SREG3 DESOCUPADO MSG MSGNR
Clase de mensaje Número de mensaje
4. Interface PLC MCP1
20 Festo GDCP-CMXR-F-ES 0909a
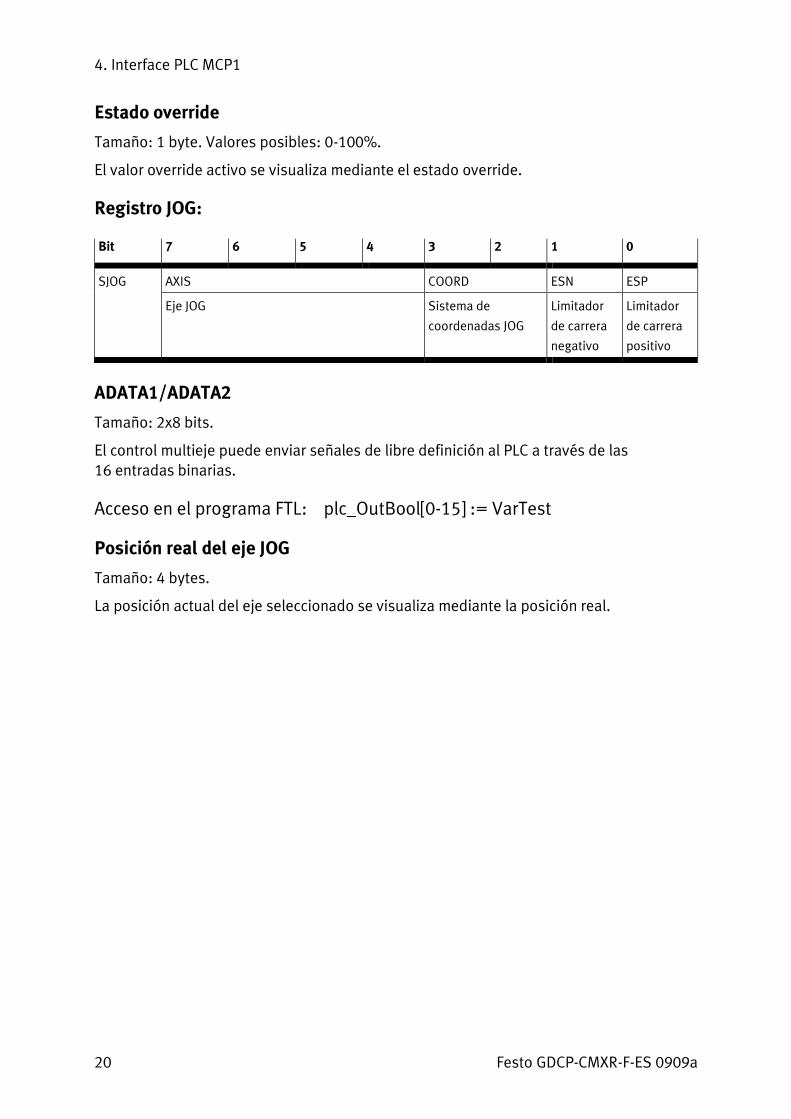
Estado override
Tamaño: 1 byte. Valores posibles: 0-100%.
El valor override activo se visualiza mediante el estado override.
Registro JOG:
Bit 7 6 5 4 3 2 1 0
SJOG AXIS COORD ESN ESP
Eje JOG Sistema de
coordenadas JOG
Limitador
de carrera
negativo
Limitador
de carrera
positivo
ADATA1/ADATA2
Tamaño: 2x8 bits.
El control multieje puede enviar señales de libre definición al PLC a través de las 16 entradas binarias.
Acceso en el programa FTL: plc_OutBool[0-15] := VarTest
Posición real del eje JOG
Tamaño: 4 bytes.
La posición actual del eje seleccionado se visualiza mediante la posición real.
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 21
4.4 Funcionamiento de la interface PLC MCP1
4.4.1 Watchdog
El PLC envía el bit de control watchdog CREG.WDBIT al controlador de robot. Éste, a su vez, refleja el bit en la salida SREG.WDBIT con un retardo máximo del parámetro watchdogTimeout.
Condición El control y la interface se han arrancado correctamente.
Acción Activación y borrado de CREG.WDBIT alternativos.
Reacción El valor actual de CREG.WDBIT se emite en SREG.WDBIT.
Configuración La configuración se efectúa mediante FCT.
4.4.2 Error activo
El bit SREG.ERROR informa al control de que hay por lo menos un error. La causa del error puede evaluarse con el registro SREG3. El controlador de robot debe estar en perfecto estado para poder funcionar a través de la interface PLC.
4.4.3 Sistema de comunicación
El bit 6 del registro de estado 1 indica si hay errores.
El registro de estado 3 permite leer la clase y el número de mensaje en caso de error.
4.4.4 Clases y números de mensaje en MCP1
La clase de mensaje proporciona una clasificación aproximada de un mensaje y se trans-mite en el registro SREG3.MSG con 3 bits. El número de mensaje proporciona información adicional sobre la clase de mensaje. Éste se visualiza con otros 4 bits en el registro de estado SREG3.MSGNR.
Indicación
El mensaje que aparece tiene validez a partir del momento en que SREG3.MSG deja de ser igual a 0 o cuando se activa el bit de error SREG.ERROR.
4. Interface PLC MCP1
22 Festo GDCP-CMXR-F-ES 0909a
Codificación de la clase de mensaje MSG y números de mensaje MSGNR:
En la columna "Componente" se encuentran mencionados los números de los componentes del mensaje de error o del grupo de error, contenidos en la indicación del estado del CDSA-D1-VX y en los reportes del CMXR-C1 de estos errores.
MSG MSGNR Comentario Componente
Error de interface PLC, MSG=1
1 1 No ha podido cargarse el programa 51.390
1 2 No ha podido descargarse el programa 51.391
1 3 No ha podido iniciarse el programa 51.392
1 4 No ha podido detenerse el programa 51.393
Error de sistema, MSG=2
2 1 Error en el componente MotionControl 4000.xx
2 2 Error en el componente TeachControl
2 3 Error en el componente Motion Function Blocks
2 4 Error en el componente RobotControl
2 5 Error en el componente Sistema de base 2050.xx
2 6 Error en el componente Sistema E/S 2220.xx
2 7 Error en el componente Sistema en tiempo real IEC
2 8 Error en el componente Interface de comunicación
2 9 Error en el componente Interface de visualización
2 15 Error en el componente Componente del sistema 6338.xx
4.4.5 Acuse de recibo de errores
El CREG.QUITERR permite a la unidad de control de nivel superior acusar recibo de los errores existentes.
Indicación
El acuse de recibo de un error no equivale a su eliminación. Para investigar su causa con mayor detalle es recomendable utilizar herramientas especiales.
Acuse de recibo y priorización de mensajes
Como sólo existe un bit para confirmar los mensajes, se han introducido las prioridades siguientes para acusar el recibo de los mensajes.
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 23
Prioridad Clase de mensaje
A Error de interface PLC
B Error de sistema
Un error se confirma con un flanco de subida en CREG.QUITERR. Los errores sólo pueden borrarse consecutivamente. Por tanto, en primer lugar se acusa recibo del error de interface (si existe). Cuando ello sucede, se acusa recibo de posibles errores de sistema. Por motivo de la reproducción de errores, los errores de interface se guardan como “Mensaje informativo” en el buffer de mensajes del sistema.
Condición El control y la interface se han iniciado correctamente.
Acción Activación alternativa del bit CREG.QUITERR (flanco de bajada).
Reacción Se acusa recibo del último mensaje (primero errores de interface y
después errores de control).
4.4.6 Solicitación de control de nivel superior
Para obtener derecho de escritura con una interface PLC y, en consecuencia, acceder al control multieje, debe solicitarse dicho derecho al control multieje.
El bit SREG.ACCENA indica si el derecho de escritura está libre o asignado.
Para solicitar derechos de escritura, un flanco de subida debe colocarse en el bit CREG.WRREQU.
En la tabla del capítulo Señales de la interface PLC se describen las funciones bloqueadas y permitidas.
Solicitación y recepción de control de nivel superior
Al recibir derechos de escritura para una interface, el bit SREG.WRACC se activa. Es decir, la unidad de control de nivel superior tiene acceso absoluto al control multieje mientras que el bit de dicho control está activado y el bit CREG.WRREQU permanece activado.
Solicitación de control de nivel superior denegada
En ocasiones, puede ocurrir que en el momento de intentar el registro ya haya otra instan-cia de interface PLC con derechos de escritura. Ello se reconoce, por una parte, porque el bit SREG.ACCENA está en FALSE (falso) y porque no se recibe una respuesta positiva. Si a pesar de ello se ha iniciado un intento de registro, SREG.WRACC nunca será TRUE (verdad).
Devolución del control de nivel superior
Si la interface posee el control de nivel superior, puede devolverlo a CREG.WRREQU con un flanco de bajada. La devolución del control de nivel superior se confirma con SREG.WRACC = FALSE.
4.4.7 Conexión de actuadores
Condición Control de nivel superior en la interface. El modo de funcionamiento válido está seleccionado.
4. Interface PLC MCP1
24 Festo GDCP-CMXR-F-ES 0909a
No hay errores.
La parada de emergencia no está activa.
Acción Activación del bit CREG.DRENA.
Reacción Los actuadores del robot se conectan. ITF devuelve SREG.DRRDY=TRUE.
4.4.8 Pausa programada
Condición Control de nivel superior en la interface.
Acción Activación del bit CREG.HALTENA.
Reacción Si la macro ProgHold() está ajustada en un programa de desplazamiento, la ejecución se interrumpe en esta posi-ción. Consulte el manual de programación de CMXR para
la descripción de la pausa programada. La interface responde con SREG.HALT “Pausa activa”. Al
reanudarse el programa, SREG.HALT vuelve a FALSE.
4.4.9 Desplazamiento JOG
Indicación
Esta función sólo puede efectuarse con MCP1-PB y no con MCP1-EA.
Desplazamiento JOG en sentido positivo/negativo
Condición Control de nivel superior en la interface.
Los actuadores están conectados. El modo de funcionamiento configurado permite el
desplazamiento JOG. El bit CREG.JPENA está no activado. En el registro de control JOG están seleccionados un eje JOG
CJOG.AXIS y un sistema de coordenadas JOG CJOG.COORD.
Acción Activación de los bits CJOG.JOGN o CJOG.JOGP.
Reacción El eje JOG seleccionado se desplaza en el sistema de referencia selec-
cionado de manera análoga a las teclas JOG del CDSA siempre y cuando los bits CJOG.JOGN o CJOG.JOGP se encuentren en estado TRUE.
Desplazamiento JOG hasta la posición deseada
Condición Control de nivel superior en la interface. Los actuadores están conectados. El modo de funcionamiento configurado permite el
desplazamiento JOG. El bit CREG.JPENA está activado. En el registro de control JOG están seleccionados un eje JOG
CJOG.AXIS y un sistema de coordenadas JOG CJOG.COORD. El registro de control JOGPOS está fijado a una posición
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 25
alcanzable en los datos JOG.
Acción Activación de los bits CJOG.JOGN o CJOG.JOGP.
Reacción Al activar los bits CJOG.JOGN o CJOG.JOGP (pueden activarse los dos),
se efectúa el desplazamiento JOG a la posición indicada en el registro de control de los datos JOG. El movimiento se detiene al borrarse los bits JOGN o JOGP.
Nota:
Los ejes manuales sólo se pueden desplazar a una posición prefijada en el sistema de coordinadas del eje. Esto no es posible en otros sistemas de coordinadas de ejes.
Registro de control JOG CJOG
AXIS Número del eje JOG
0 a 8 equivale a:
Desplazamiento en ejes: A1 a A6, Ejes auxiliares A7 a A9
Desplazamiento en coordenadas cartesianas: X, Y, Z, A, B, C, AUX1 a 3
Si se seleccionan ejes que no existen, se activa el último eje, p. ej.: si el robot tiene 5 ejes y se selecciona el eje 6, el eje 5 está activo.
COORD Sistema de coordenadas JOG
Sistema de coordenadas de ejes
Sistema de coordenadas universales
Sistema de referencia activo
Sistema de coordenadas de herramienta
JOGN Bit JOG en sentido negativo Desplazamiento manual en sentido negativo.
JOGP Bit JOG en sentido positivo
Desplazamiento manual en sentido positivo. Si el bit CREG.JPENA está activado, el desplazamiento se efectúa hasta la posición de destino JOGPOS del registro de posición JOG.
Registro de estado JOG
AXIS Eje JOG activo
COORD Sistema de coordenadas JOG activo
ESN Alcanzado el limitador de carrera negativo
ESP Alcanzado el limitador de carrera positivo
4. Interface PLC MCP1
26 Festo GDCP-CMXR-F-ES 0909a
4.4.10 Selección del modo de funcionamiento
Mediante la interface pueden seleccionarse dos modos de funcionamiento: MANUAL y AUTOMÁTICO.
Indicación
Si el sistema se ha configurado para ajustar el modo de funciona-miento a través de E/S digitales y no mediante PROFIBUS, las entradas HAND (manual) y AUTO (automático) no tienen función.
Entradas de mando
CREG.AUTO CREG.HAND Estado
0 0 No válido, ningún modo de
funcionamiento
0 1 Modo de funcionamiento manual
1 0 Modo de funcionamiento automático
1 1 No válido, ningún modo de
funcionamiento
Salidas de estado
SREG.AUTO SREG.HAND Estado
0 0 No válido, ningún modo de
funcionamiento
0 1 Modo de funcionamiento manual
1 0 Modo de funcionamiento automático
Consulte el manual del sistema del control multieje para una descripción del comporta-miento del sistema en un modo de funcionamiento no válido. El período transcurrido entre la conmutación de un modo de funcionamiento válido a otro igualmente válido está fijado en 1,00 s.
4.4.11 Carga del programa
El programa se carga con el número de programa transferido. Es posible cargar varios programas consecutivamente.
Condición Control de nivel superior en la interface PLC. El control dispone de los programas indicados en la tabla. Los números de programa 1 a n aparecen en el registro de
programa MCP1-EA: registro CREG.PRGNR (4 bits) MCP1-PB: registro PRGNR (1 byte)
Acción Activación del bit CREG.LOAD (flanco de subida). Espera a Acknowledge SREG.ACK (reconocer SREG.ACK) o a
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 27
Not Acknowledge SREG.NACK (no reconocer SREG.NACK).
Reacción El programa/proyecto se carga.
Carga del primer programa con confirmación positiva
Condición SREG.ACK se activa e indica que la carga se ha efectuado correctamente.
SREG.LOADED se activa e indica que se ha cargado un programa como mínimo.
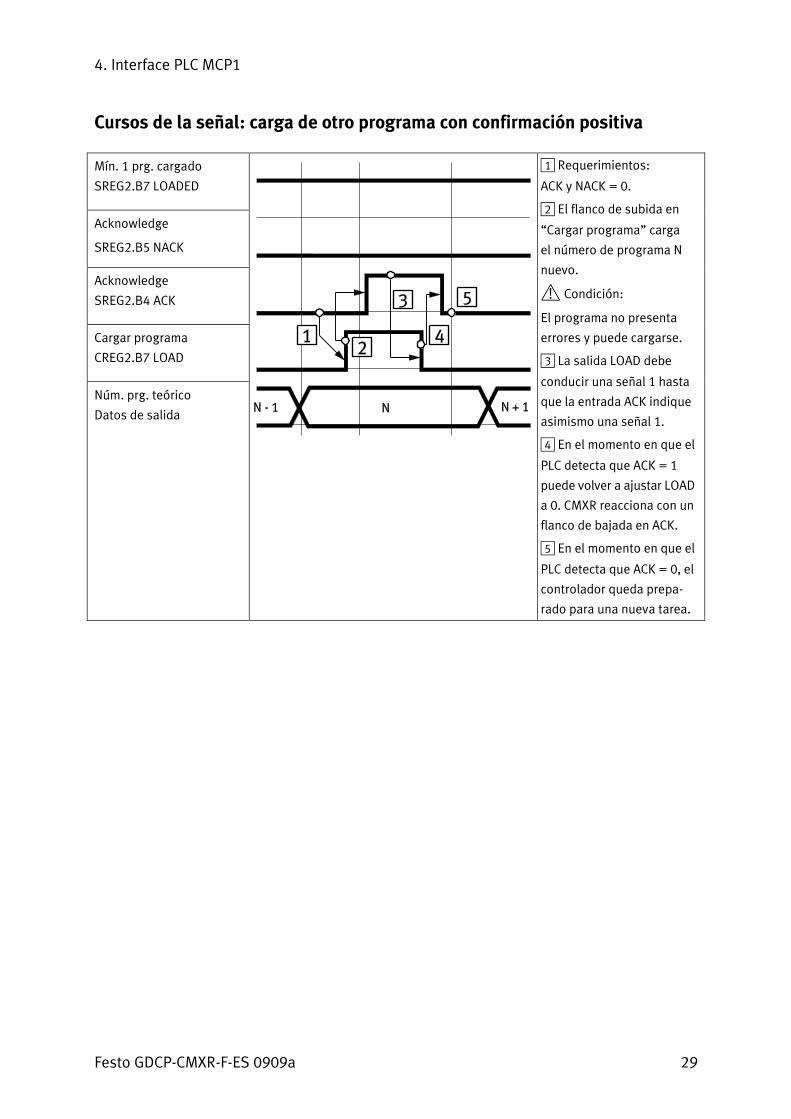
Carga de otro programa con confirmación positiva
Condición SREG.ACK se activa e indica que la carga se ha efectuado correctamente.
SREG.LOADED permanece activado e indica que se ha cargado un programa como mínimo.
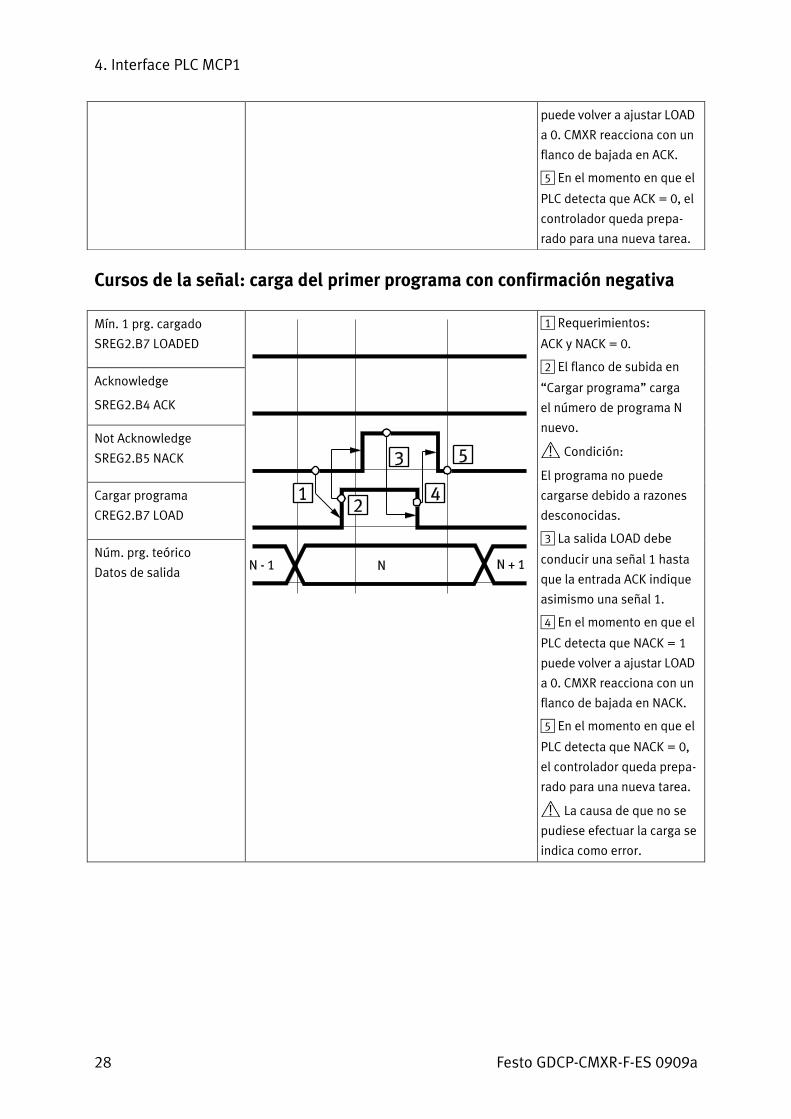
Carga del primer programa con confirmación negativa
Condición SREG.NACK se activa e indica que la carga no se ha efectuado correctamente.
SREG.LOADED permanece en FALSE. SREG.ERROR indica un error.
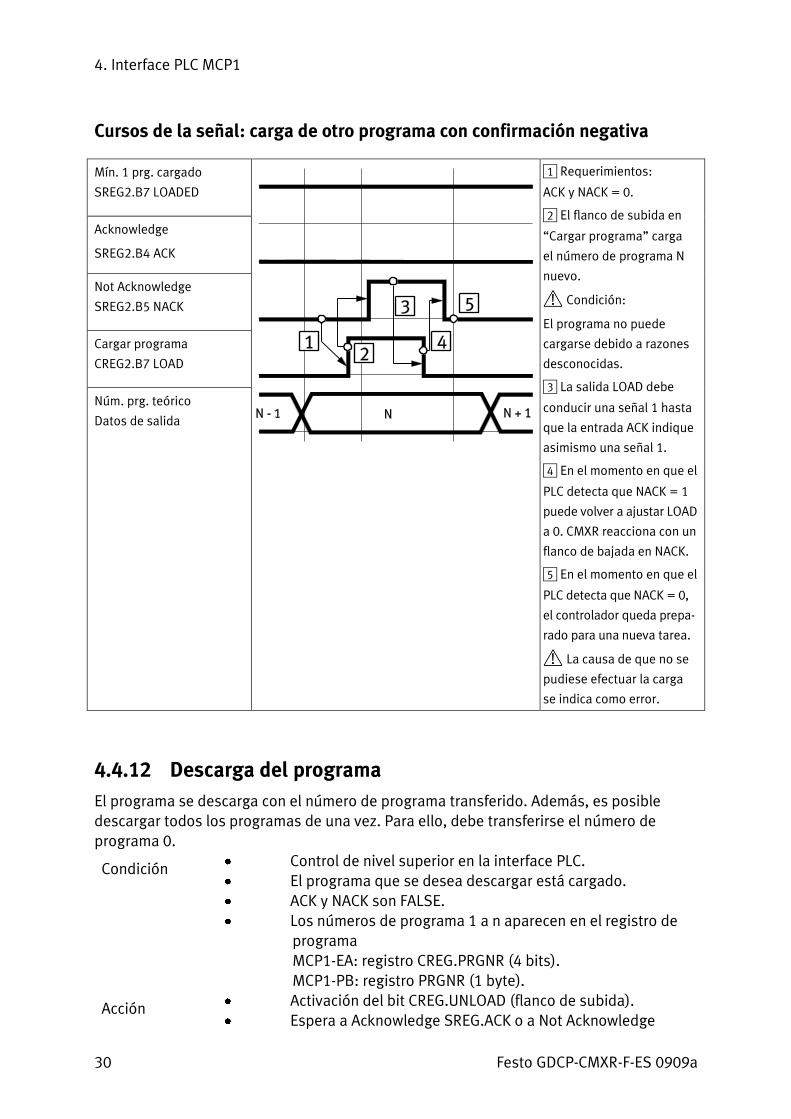
Carga de otro programa con confirmación negativa
Condición SREG.NACK se activa e indica que la carga no se ha efectuado correctamente.
SREG.LOADED permanece activado e indica que se ha cargado un programa como mínimo.
SREG.ERROR indica un error.
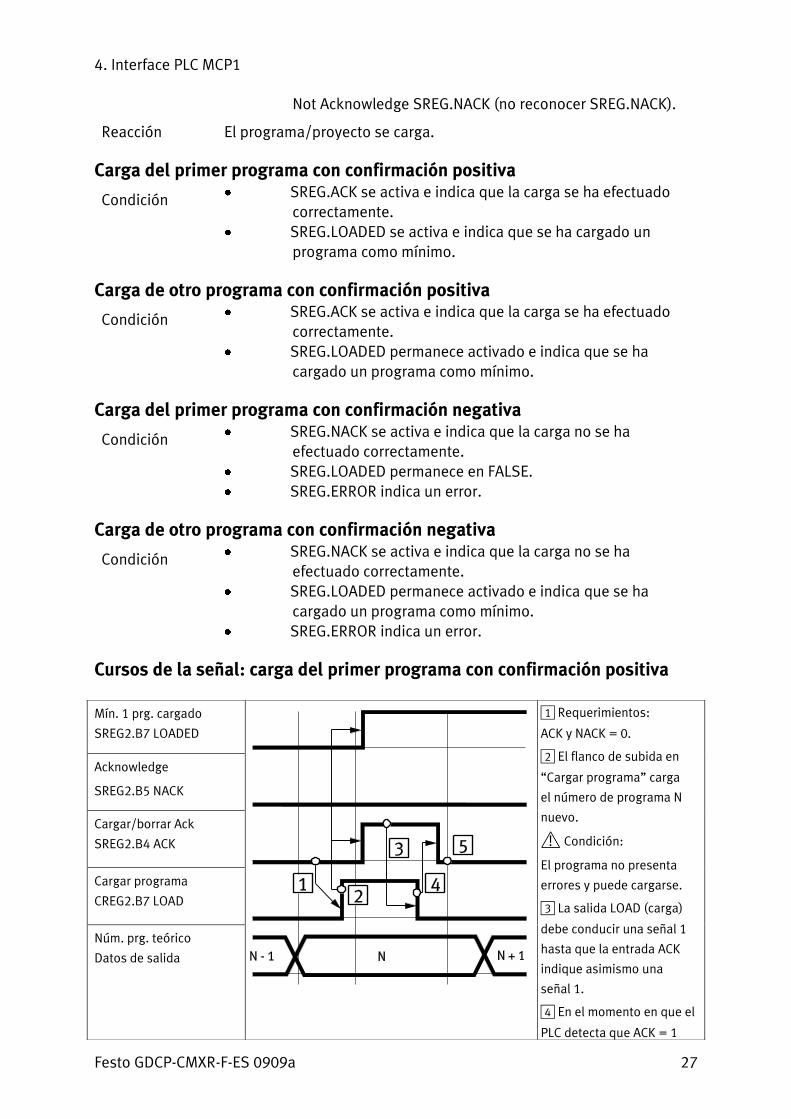
Cursos de la señal: carga del primer programa con confirmación positiva
Mín. 1 prg. cargado
SREG2.B7 LOADED
1 Requerimientos:
ACK y NACK = 0.
2 El flanco de subida en
“Cargar programa” carga
el número de programa N
nuevo.
Condición:
El programa no presenta
errores y puede cargarse.
3 La salida LOAD (carga)
debe conducir una señal 1
hasta que la entrada ACK
indique asimismo una
señal 1.
4 En el momento en que el
PLC detecta que ACK = 1
Acknowledge
SREG2.B5 NACK
Cargar/borrar Ack
SREG2.B4 ACK
Cargar programa
CREG2.B7 LOAD
Núm. prg. teórico
Datos de salida
4. Interface PLC MCP1
28 Festo GDCP-CMXR-F-ES 0909a
Cursos de la señal: carga del primer programa con confirmación negativa
Mín. 1 prg. cargado
SREG2.B7 LOADED
1 Requerimientos:
ACK y NACK = 0.
2 El flanco de subida en
“Cargar programa” carga
el número de programa N
nuevo.
Condición:
El programa no puede
cargarse debido a razones
desconocidas.
3 La salida LOAD debe
conducir una señal 1 hasta
que la entrada ACK indique
asimismo una señal 1.
4 En el momento en que el
PLC detecta que NACK = 1
puede volver a ajustar LOAD
a 0. CMXR reacciona con un
flanco de bajada en NACK.
5 En el momento en que el
PLC detecta que NACK = 0,
el controlador queda prepa-
rado para una nueva tarea.
La causa de que no se
pudiese efectuar la carga se
indica como error.
Acknowledge
SREG2.B4 ACK
Not Acknowledge
SREG2.B5 NACK
Cargar programa
CREG2.B7 LOAD
Núm. prg. teórico
Datos de salida
puede volver a ajustar LOAD
a 0. CMXR reacciona con un
flanco de bajada en ACK.
5 En el momento en que el
PLC detecta que ACK = 0, el
controlador queda prepa-
rado para una nueva tarea.
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 29
Cursos de la señal: carga de otro programa con confirmación positiva
Mín. 1 prg. cargado
SREG2.B7 LOADED
1 Requerimientos:
ACK y NACK = 0.
2 El flanco de subida en
“Cargar programa” carga
el número de programa N
nuevo.
Condición:
El programa no presenta
errores y puede cargarse.
3 La salida LOAD debe
conducir una señal 1 hasta
que la entrada ACK indique
asimismo una señal 1.
4 En el momento en que el
PLC detecta que ACK = 1
puede volver a ajustar LOAD
a 0. CMXR reacciona con un
flanco de bajada en ACK.
5 En el momento en que el
PLC detecta que ACK = 0, el
controlador queda prepa-
rado para una nueva tarea.
Acknowledge
SREG2.B5 NACK
Acknowledge
SREG2.B4 ACK
Cargar programa
CREG2.B7 LOAD
Núm. prg. teórico
Datos de salida
4. Interface PLC MCP1
30 Festo GDCP-CMXR-F-ES 0909a
Cursos de la señal: carga de otro programa con confirmación negativa
Mín. 1 prg. cargado
SREG2.B7 LOADED
1 Requerimientos:
ACK y NACK = 0.
2 El flanco de subida en
“Cargar programa” carga
el número de programa N
nuevo.
Condición:
El programa no puede
cargarse debido a razones
desconocidas.
3 La salida LOAD debe
conducir una señal 1 hasta
que la entrada ACK indique
asimismo una señal 1.
4 En el momento en que el
PLC detecta que NACK = 1
puede volver a ajustar LOAD
a 0. CMXR reacciona con un
flanco de bajada en NACK.
5 En el momento en que el
PLC detecta que NACK = 0,
el controlador queda prepa-
rado para una nueva tarea.
La causa de que no se
pudiese efectuar la carga
se indica como error.
Acknowledge
SREG2.B4 ACK
Not Acknowledge
SREG2.B5 NACK
Cargar programa
CREG2.B7 LOAD
Núm. prg. teórico
Datos de salida
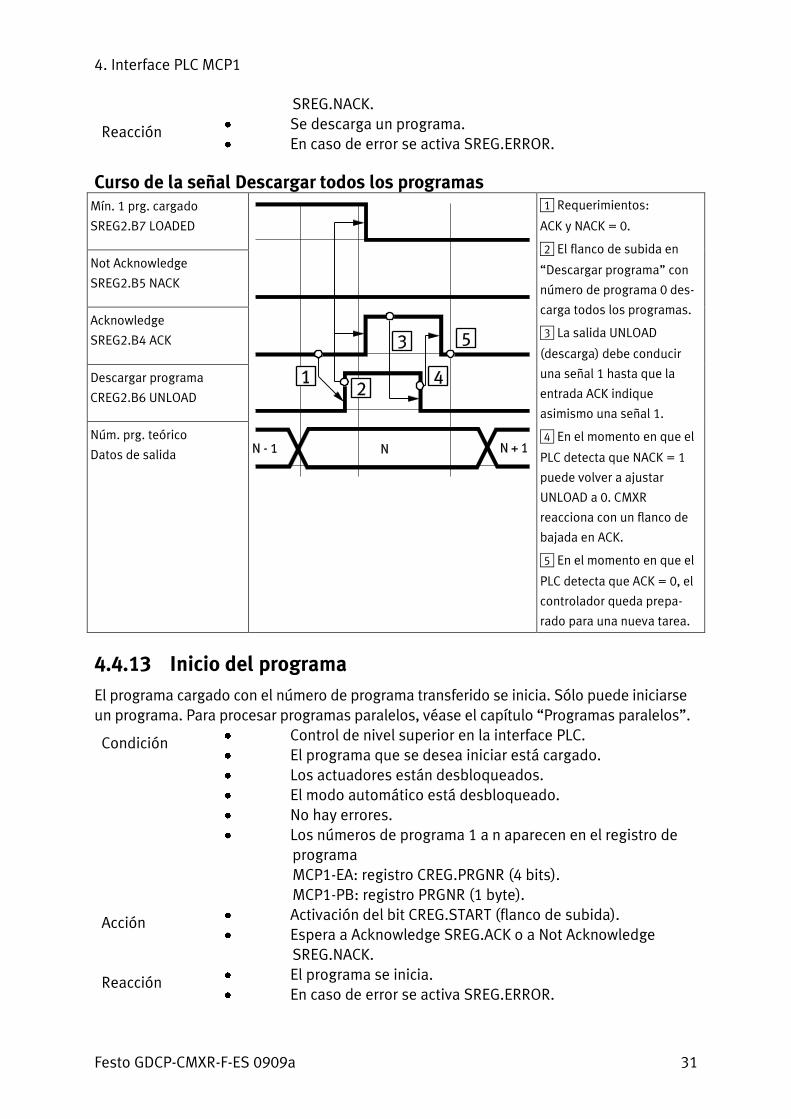
4.4.12 Descarga del programa
El programa se descarga con el número de programa transferido. Además, es posible descargar todos los programas de una vez. Para ello, debe transferirse el número de programa 0.
Condición Control de nivel superior en la interface PLC.
El programa que se desea descargar está cargado. ACK y NACK son FALSE. Los números de programa 1 a n aparecen en el registro de
programa MCP1-EA: registro CREG.PRGNR (4 bits). MCP1-PB: registro PRGNR (1 byte).
Acción Activación del bit CREG.UNLOAD (flanco de subida). Espera a Acknowledge SREG.ACK o a Not Acknowledge
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 31
SREG.NACK.
Reacción Se descarga un programa. En caso de error se activa SREG.ERROR.
Curso de la señal Descargar todos los programas Mín. 1 prg. cargado
SREG2.B7 LOADED
1 Requerimientos:
ACK y NACK = 0.
2 El flanco de subida en
“Descargar programa” con
número de programa 0 des-
carga todos los programas.
3 La salida UNLOAD
(descarga) debe conducir
una señal 1 hasta que la
entrada ACK indique
asimismo una señal 1.
4 En el momento en que el
PLC detecta que NACK = 1
puede volver a ajustar
UNLOAD a 0. CMXR
reacciona con un flanco de
bajada en ACK.
5 En el momento en que el
PLC detecta que ACK = 0, el
controlador queda prepa-
rado para una nueva tarea.
Not Acknowledge
SREG2.B5 NACK
Acknowledge
SREG2.B4 ACK
Descargar programa
CREG2.B6 UNLOAD
Núm. prg. teórico
Datos de salida
4.4.13 Inicio del programa
El programa cargado con el número de programa transferido se inicia. Sólo puede iniciarse un programa. Para procesar programas paralelos, véase el capítulo “Programas paralelos”.
Condición Control de nivel superior en la interface PLC. El programa que se desea iniciar está cargado. Los actuadores están desbloqueados. El modo automático está desbloqueado. No hay errores. Los números de programa 1 a n aparecen en el registro de
programa MCP1-EA: registro CREG.PRGNR (4 bits).
MCP1-PB: registro PRGNR (1 byte).
Acción Activación del bit CREG.START (flanco de subida). Espera a Acknowledge SREG.ACK o a Not Acknowledge
SREG.NACK.
Reacción El programa se inicia. En caso de error se activa SREG.ERROR.
4. Interface PLC MCP1
32 Festo GDCP-CMXR-F-ES 0909a
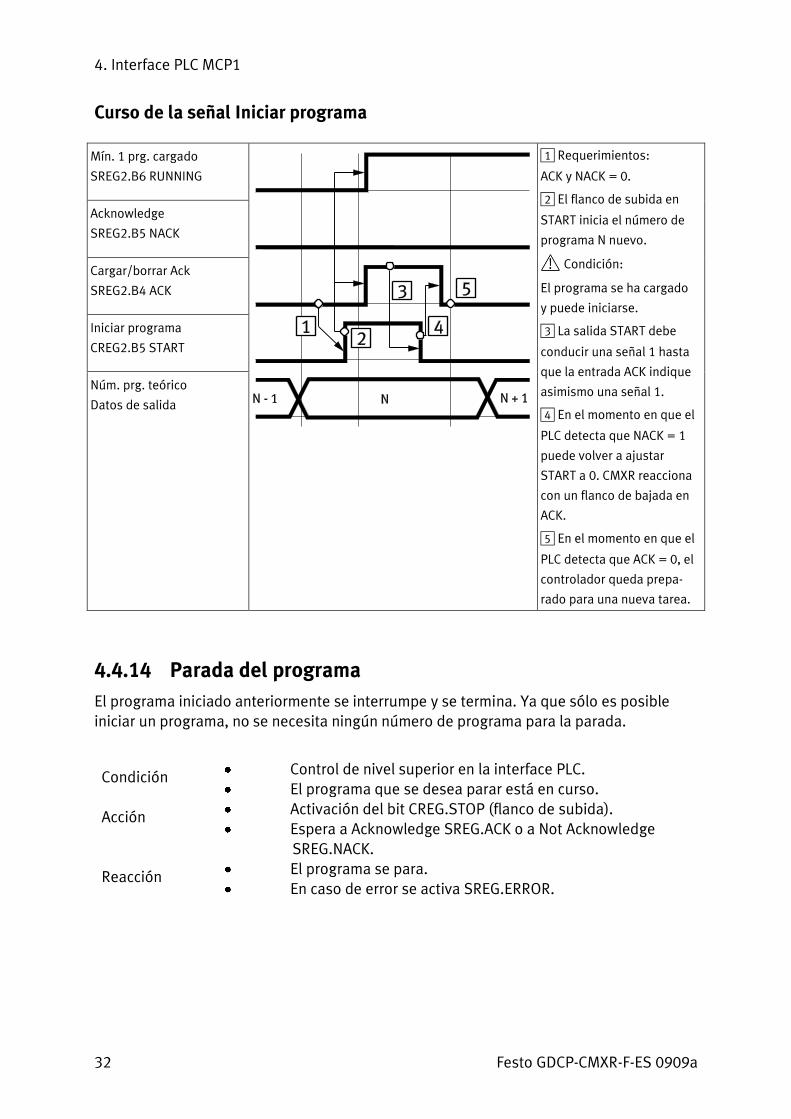
Curso de la señal Iniciar programa
Mín. 1 prg. cargado
SREG2.B6 RUNNING
1 Requerimientos:
ACK y NACK = 0.
2 El flanco de subida en
START inicia el número de
programa N nuevo.
Condición:
El programa se ha cargado
y puede iniciarse.
3 La salida START debe
conducir una señal 1 hasta
que la entrada ACK indique
asimismo una señal 1.
4 En el momento en que el
PLC detecta que NACK = 1
puede volver a ajustar
START a 0. CMXR reacciona
con un flanco de bajada en
ACK.
5 En el momento en que el
PLC detecta que ACK = 0, el
controlador queda prepa-
rado para una nueva tarea.
Acknowledge
SREG2.B5 NACK
Cargar/borrar Ack
SREG2.B4 ACK
Iniciar programa
CREG2.B5 START
Núm. prg. teórico
Datos de salida
4.4.14 Parada del programa
El programa iniciado anteriormente se interrumpe y se termina. Ya que sólo es posible iniciar un programa, no se necesita ningún número de programa para la parada.
Condición Control de nivel superior en la interface PLC. El programa que se desea parar está en curso.
Acción Activación del bit CREG.STOP (flanco de subida). Espera a Acknowledge SREG.ACK o a Not Acknowledge
SREG.NACK.
Reacción El programa se para.
En caso de error se activa SREG.ERROR.
4. Interface PLC MCP1
Festo GDCP-CMXR-F-ES 0909a 33
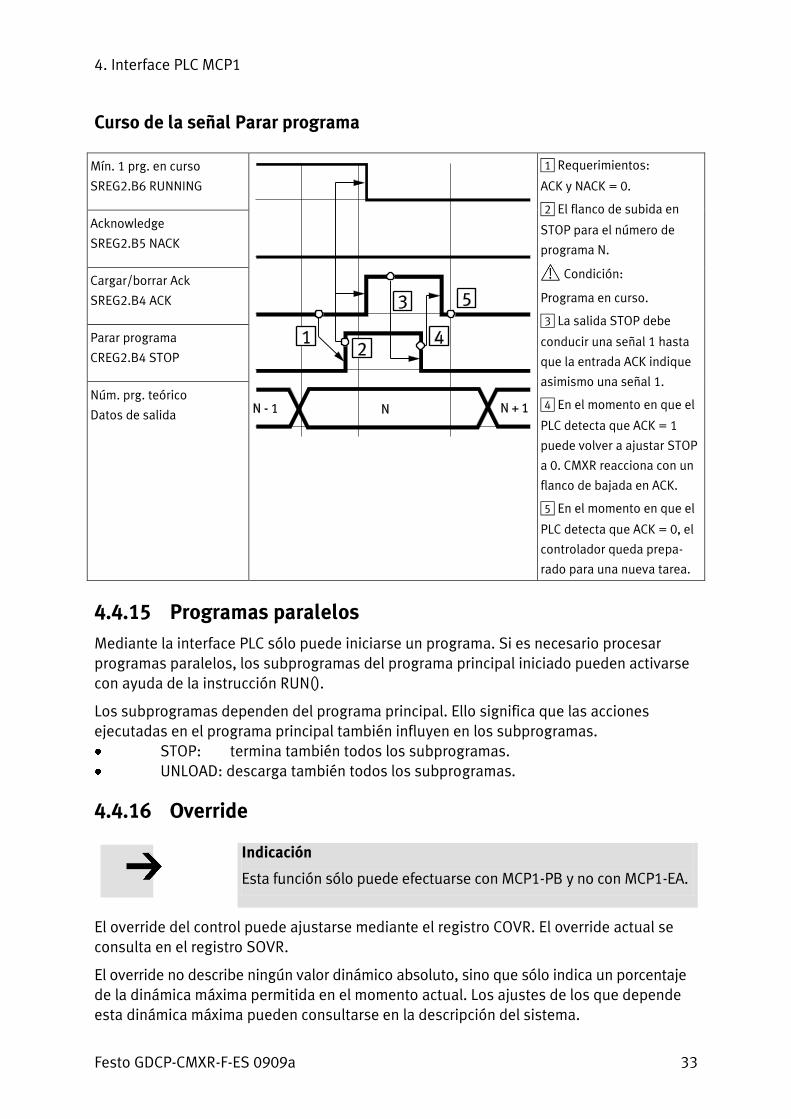
Curso de la señal Parar programa
Mín. 1 prg. en curso
SREG2.B6 RUNNING
1 Requerimientos:
ACK y NACK = 0.
2 El flanco de subida en
STOP para el número de
programa N.
Condición:
Programa en curso.
3 La salida STOP debe
conducir una señal 1 hasta
que la entrada ACK indique
asimismo una señal 1.
4 En el momento en que el
PLC detecta que ACK = 1
puede volver a ajustar STOP
a 0. CMXR reacciona con un
flanco de bajada en ACK.
5 En el momento en que el
PLC detecta que ACK = 0, el
controlador queda prepa-
rado para una nueva tarea.
Acknowledge
SREG2.B5 NACK
Cargar/borrar Ack
SREG2.B4 ACK
Parar programa
CREG2.B4 STOP
Núm. prg. teórico
Datos de salida
4.4.15 Programas paralelos
Mediante la interface PLC sólo puede iniciarse un programa. Si es necesario procesar programas paralelos, los subprogramas del programa principal iniciado pueden activarse con ayuda de la instrucción RUN().
Los subprogramas dependen del programa principal. Ello significa que las acciones ejecutadas en el programa principal también influyen en los subprogramas. STOP: termina también todos los subprogramas. UNLOAD: descarga también todos los subprogramas.
4.4.16 Override
Indicación
Esta función sólo puede efectuarse con MCP1-PB y no con MCP1-EA.
El override del control puede ajustarse mediante el registro COVR. El override actual se consulta en el registro SOVR.
El override no describe ningún valor dinámico absoluto, sino que sólo indica un porcentaje de la dinámica máxima permitida en el momento actual. Los ajustes de los que depende esta dinámica máxima pueden consultarse en la descripción del sistema.
4. Interface PLC MCP1
34 Festo GDCP-CMXR-F-ES 0909a
El registro incluye el override asignado. Éste se interpreta como se indica a continuación:
Modo automático: 0 Se activa un override del 0,1%. 1-100 Se activa un override del 1% al 100%.
Modo JOG: 0 Se activa un override JOG de 0,1 incrementos. 1 Se activa un override JOG de 1 incremento. 2 ... 100 Se activa un override JOG del 2% al 100%.
Otros valores de registro (< 0 y > 100) son ignorados y se mantiene el último override válido.
Condición Control de nivel superior en la interface PLC.
Acción Escritura del override nuevo en el registro COVR.
Reacción El override ajustado se acepta y se refleja en el registro SOVR.
4.4.17 Intercambio de datos cíclicos E/S
Indicación
Esta función sólo puede efectuarse con MCP1-PB y no con MCP1-EA.
Es posible intercambiar datos de 2 bytes en cada ciclo entre el PLC y el control multieje.
Los datos se transmiten a los registros ADATA1 y ADATA2 o se reciben en los registros EDATA1 y EDATA2. El proprio usuario puede definir el contenido de estos 16 bits.
Desde el programa de usuario se accede a los valores de variables E/S. Los nombres de
las variables son: plc_InBool[0-15] Para datos de entrada. plc_OutBool[0-15] Para datos de salida.
Orden de bytes
EDATA1, ADATA1 = Lowbyte
EDATA2, ADATA2 = Highbyte
5. Interface PLC MCP 2
Festo GDCP-CMXR-F-ES 0909a 35
5 Interface PLC MCP 2
5.1 MCP2-PB
MCP2-PB incluye señales de mando y de estado de 52 bytes respectivamente. MCP2-PB posee comandos extensibles acíclicamente. En PROFIBUS se transmiten las señales de MCP1 y de MCP2. Las señales se intercambian como conjuntos de datos E/S en PROFIBUS.
Conjunto de datos en PROFIBUS
Junto con MCP2 se transmite siempre MCP1.
MCP1-PB MCP2-PB
MCP1-EA Cabecera Parámetros
Datos de entrada 2 bytes 10 bytes 4 bytes 48 bytes
Datos de salida 2 bytes 10 bytes 4 bytes 48 bytes
5.1.1 Señales de mando
Byte 1 2 3 4
Cabecera CREG CODE SUBCODE INDEX
Registro de control Código de función Código de
subfunción
Índice de datos
Bit 7 6 5 4 3 2 1 0
CREG EXECUTE
DES
OCUPADO
DES-
OCUPADO
DES-
OCUPADO
DES-
OCUPADO
DES-
OCUPADO
DES-
OCUPADO
DES-
OCUPADO
Válido
5.1.2 Señales de estado
Byte 1 2 3 4
Cabecera SREG CODE SUBCODE INDEX
Registro de estado Código de función Código de
subfunción
Índice de datos
Bit 7 6 5 4 3 2 1 0
SREG RETVAL ERROR DONE
Valor de retorno Bit de
error
Final
5. Interface PLC MCP 2
36 Festo GDCP-CMXR-F-ES 0909a
5.2 Funcionamiento de la interface PLC MCP2
Mediante la interface de comando MCP2 pueden intercambiarse datos acíclicos con el control multieje. El funcionamiento de la interface de comando no depende del control de nivel superior. Ello significa que, incluso cuando el robot se controle desde la unidad manual, es posible intercambiar datos a través del bus de campo.
La interface de comando tiene un ancho de 52 bytes que a su vez se reparten en 4 bytes de cabecera y 48 bytes de parámetros. La cabecera de la interface es importante para el control de la transmisión, y los parámetros contienen los datos de transmisión.
Cabecera MCP2
La cabecera MCP2 se compone de 4 bytes de entrada y 4 de salida. CREG, SREG Registros de control o de estado (1 byte).
CODE Código de función. SUBCODE Subcódigo del código de función. INDEX Índice del código de función.
Desarrollo del comando
Antes de poder ejecutar un comando o una tarea debe indicarse la función en la cabecera. Una tarea consta siempre de CODE (código), SUBCODE (subcódigo) e INDEX (índice). Si alguno de estos datos no es necesario, en su lugar se transmite 0.
El comando se ejecuta con EXECUTE (ejecutar) en el byte CREG. La interface responde siempre con DONE = TRUE (ejecutado = verdad). En caso de error en la transmisión, el controlador emite adicionalmente un ERROR y devuelve un código de error RETVAL de 6 bits de tamaño en el byte SREG.
Los parámetros transmitidos no son válidos hasta que la interface señala DONE = TRUE. Del mismo modo, en caso de error, el código de error RETVAL no tiene validez hasta que
los bits ERROR y DONE señalan TRUE.
5. Interface PLC MCP 2
Festo GDCP-CMXR-F-ES 0909a 37
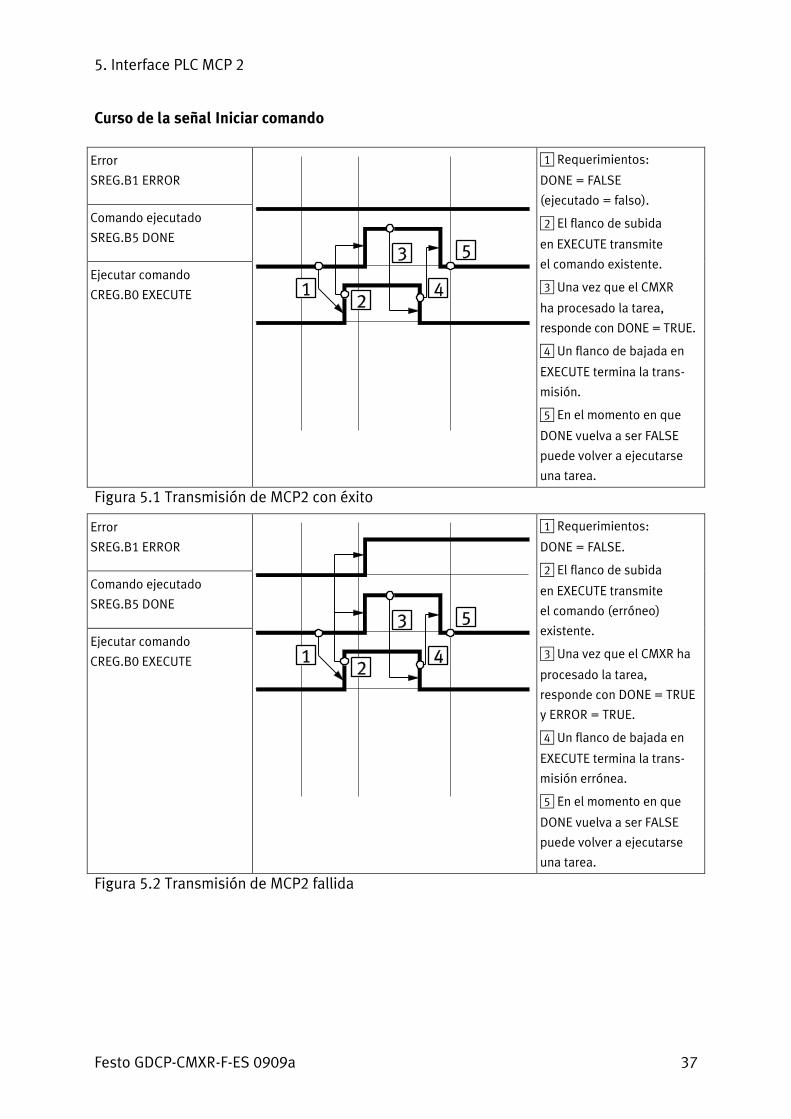
Curso de la señal Iniciar comando
Error
SREG.B1 ERROR
1 Requerimientos:
DONE = FALSE
(ejecutado = falso).
2 El flanco de subida
en EXECUTE transmite
el comando existente.
3 Una vez que el CMXR
ha procesado la tarea,
responde con DONE = TRUE.
4 Un flanco de bajada en
EXECUTE termina la trans-
misión.
5 En el momento en que
DONE vuelva a ser FALSE
puede volver a ejecutarse
una tarea.
Comando ejecutado
SREG.B5 DONE
Ejecutar comando
CREG.B0 EXECUTE
Figura 5.1 Transmisión de MCP2 con éxito
Error
SREG.B1 ERROR
1 Requerimientos:
DONE = FALSE.
2 El flanco de subida
en EXECUTE transmite
el comando (erróneo)
existente.
3 Una vez que el CMXR ha
procesado la tarea,
responde con DONE = TRUE
y ERROR = TRUE.
4 Un flanco de bajada en
EXECUTE termina la trans-
misión errónea.
5 En el momento en que
DONE vuelva a ser FALSE
puede volver a ejecutarse
una tarea.
Comando ejecutado
SREG.B5 DONE
Ejecutar comando
CREG.B0 EXECUTE
Figura 5.2 Transmisión de MCP2 fallida
5. Interface PLC MCP 2
38 Festo GDCP-CMXR-F-ES 0909a
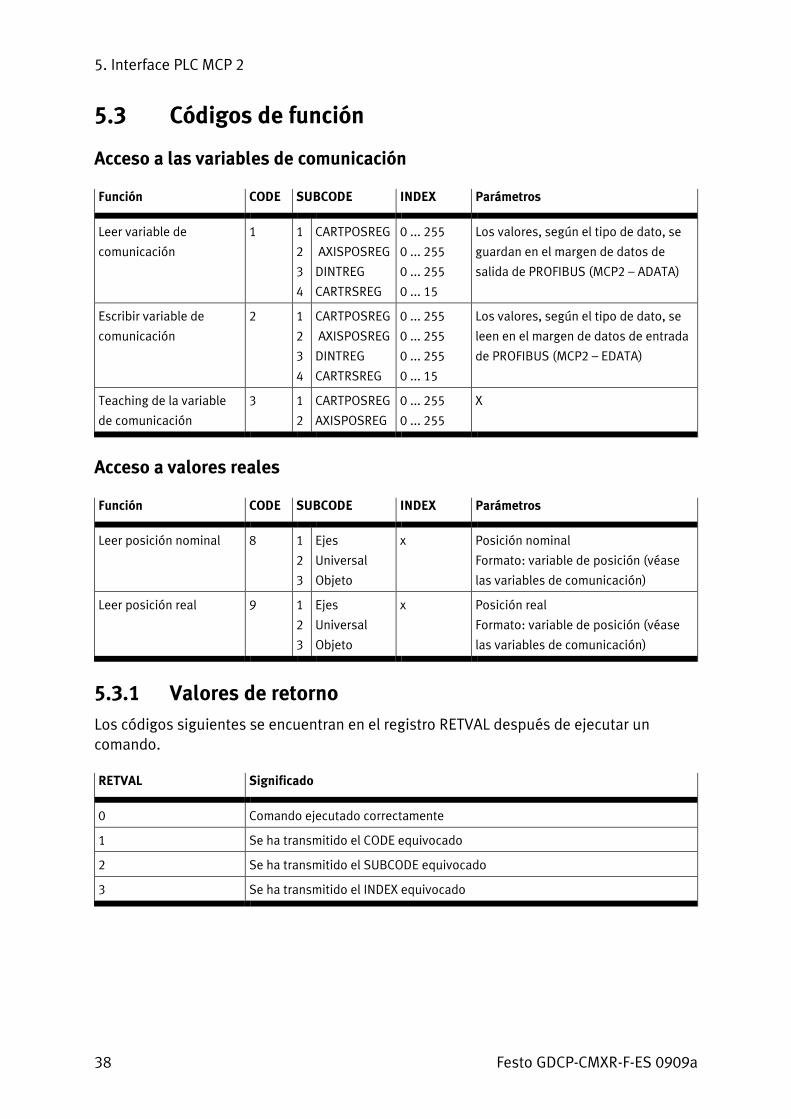
5.3 Códigos de función
Acceso a las variables de comunicación
Función CODE SUBCODE INDEX Parámetros
Leer variable de
comunicación
1 1
2
3
4
CARTPOSREG
AXISPOSREG
DINTREG
CARTRSREG
0 ... 255
0 ... 255
0 ... 255
0 ... 15
Los valores, según el tipo de dato, se
guardan en el margen de datos de
salida de PROFIBUS (MCP2 – ADATA)
Escribir variable de
comunicación
2 1
2
3
4
CARTPOSREG
AXISPOSREG
DINTREG
CARTRSREG
0 ... 255
0 ... 255
0 ... 255
0 ... 15
Los valores, según el tipo de dato, se
leen en el margen de datos de entrada
de PROFIBUS (MCP2 – EDATA)
Teaching de la variable
de comunicación
3 1
2
CARTPOSREG
AXISPOSREG
0 ... 255
0 ... 255
X
Acceso a valores reales
Función CODE SUBCODE INDEX Parámetros
Leer posición nominal 8 1
2
3
Ejes
Universal
Objeto
x Posición nominal
Formato: variable de posición (véase
las variables de comunicación)
Leer posición real 9 1
2
3
Ejes
Universal
Objeto
x Posición real
Formato: variable de posición (véase
las variables de comunicación)
5.3.1 Valores de retorno
Los códigos siguientes se encuentran en el registro RETVAL después de ejecutar un comando.
RETVAL Significado
0 Comando ejecutado correctamente
1 Se ha transmitido el CODE equivocado
2 Se ha transmitido el SUBCODE equivocado
3 Se ha transmitido el INDEX equivocado
6. Variables de comunicación
Festo GDCP-CMXR-F-ES 0909a 39
6 Variables de comunicación El sistema operativo del robot proporciona variables visibles globales para todos los programas de robot a fin de realizar el intercambio libre de datos con un control externo: Variables de posición (posiciones cartesianas y posiciones de ejes). Variables del sistema de referencia. Variables de palabra.
Estas variables pueden escribirse y leerse desde el exterior a través de cada interface PLC instalada (no MCP1-EA).
En el programa de robot, las variables de comunicación de nombre predefinido son visibles directamente.
6.1 Variables de posición
6.1.1 Acceso desde el programa de robot
La interface contiene 256 posiciones cartesianas y de ejes, respectivamente, predefinidas como sigue:
plc_CartPos [0 ... 255]: CARTPOS
plc_AxisPos [0 ... 255]: AXISPOS
Los tipos de dato CARTPOS y AXISPOS son estándar para representar posiciones.
Ejemplo: utilización en el programa de robot:
Ptp (plc_CartPos [0] )
Lin (plc_AxisPos [0] )
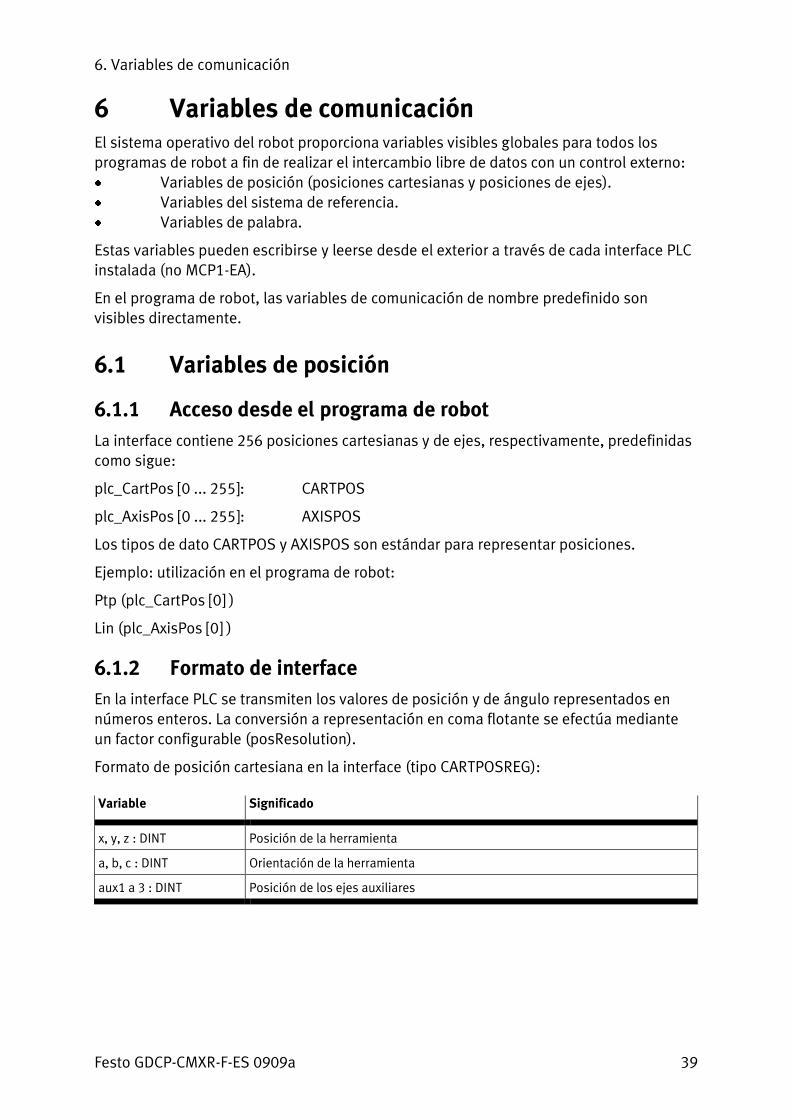
6.1.2 Formato de interface
En la interface PLC se transmiten los valores de posición y de ángulo representados en números enteros. La conversión a representación en coma flotante se efectúa mediante un factor configurable (posResolution).
Formato de posición cartesiana en la interface (tipo CARTPOSREG):
Variable Significado
x, y, z : DINT Posición de la herramienta
a, b, c : DINT Orientación de la herramienta
aux1 a 3 : DINT Posición de los ejes auxiliares
6. Variables de comunicación
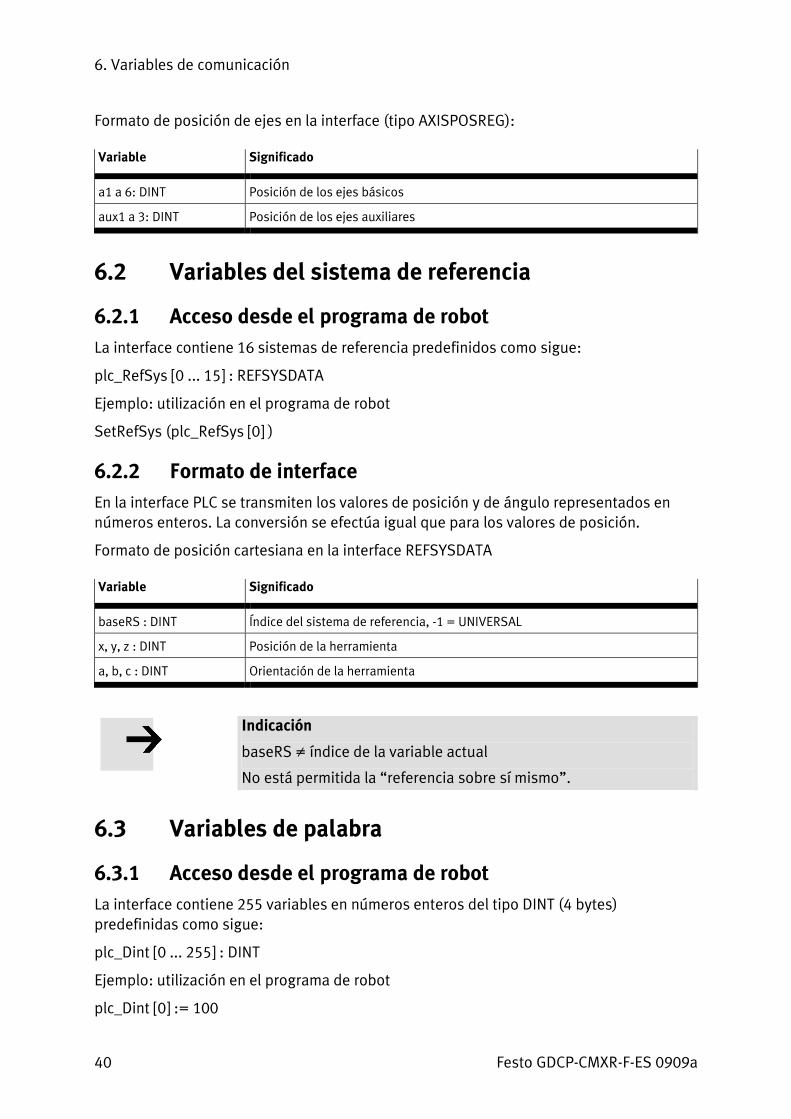
40 Festo GDCP-CMXR-F-ES 0909a
Formato de posición de ejes en la interface (tipo AXISPOSREG):
Variable Significado
a1 a 6: DINT Posición de los ejes básicos
aux1 a 3: DINT Posición de los ejes auxiliares
6.2 Variables del sistema de referencia
6.2.1 Acceso desde el programa de robot
La interface contiene 16 sistemas de referencia predefinidos como sigue:
plc_RefSys [0 ... 15] : REFSYSDATA
Ejemplo: utilización en el programa de robot
SetRefSys (plc_RefSys [0] )
6.2.2 Formato de interface
En la interface PLC se transmiten los valores de posición y de ángulo representados en números enteros. La conversión se efectúa igual que para los valores de posición.
Formato de posición cartesiana en la interface REFSYSDATA
Variable Significado
baseRS : DINT Índice del sistema de referencia, -1 = UNIVERSAL
x, y, z : DINT Posición de la herramienta
a, b, c : DINT Orientación de la herramienta
Indicación
baseRS ≠ índice de la variable actual
No está permitida la “referencia sobre sí mismo”.
6.3 Variables de palabra
6.3.1 Acceso desde el programa de robot
La interface contiene 255 variables en números enteros del tipo DINT (4 bytes) predefinidas como sigue:
plc_Dint [0 ... 255] : DINT
Ejemplo: utilización en el programa de robot
plc_Dint [0] := 100

6. Variables de comunicación
Festo GDCP-CMXR-F-ES 0909a 41
6.3.2 Formato de interface
Las variables DINT no se convierten y se transmiten 1:1 al control CMXR o al PLC.















![Description 560 310 [721 643] - Festo 560 310 en 0805NH [721 643] Festo GDCP-CMXR-SY-EN 0805NH 3 Edition _____ 0805NH Designation _____ GDCP-CMXR-SY-EN](https://img.pdfslide.net/doc/110x75/5ad9f74d7f8b9a6d318c0935/description-560-310-721-643-festo-560-310-en-0805nh-721-643-festo-gdcp-cmxr-sy-en.jpg)






![Description 560 328 en 0909a [748 998]€¦ · Beschneiden: Oben: 61,5 mm Unten: 61,5 mm Links: 43,5 mm Rechts: 43,5 mm Controller Description PLC interface Type CMXR-C1 Description](https://img.pdfslide.net/doc/110x75/5f3084f4c4dfb644f164adbd/description-560-328-en-0909a-748-998-beschneiden-oben-615-mm-unten-615-mm.jpg)





