Embed Size (px)
Citation preview

Multi-axis control system
CMXR-C2
Description System description
571688 1501c [8039859]


Version ______________________________________________________________ 1501c
Designation _____________________________________________ GDCP-CMXR-C2-SY-EN
Order no. ___________________________________________________________ 571688
Festo AG & Co., 73726 Esslingen, Germany, 2015
Internet: http://www.festo.com
E-mail: [email protected]
Reproduction, distribution and utilisation of this document, as well as the communication of its contents to others without explicit authorisation, is prohibited. Offenders will be held liable for damages. All rights reserved, in particular the right to file patent, utility model and registered design applications.
Festo GDCP-CMXR-C2-SY-EN 1501c 3

Directory of revisions
Created by: Handbook title: GDCP-CMXR-C2-SY-EN Filename: File storage location: Consec. no. Description Revisions index Date of revision 001 Created 1002NH 21 March 2010 002 Revision 1011a 29 Oct. 2010 003 Revision 1205b 10 Apr. 2012 004 Revision 1501c 15 Jan. 2015
Table 1.1 Directory of revisions
Specified directives/standards
Issue status
EN ISO 13849-1:2008-12
Table 1.2 Directives/standards specified in the document
Trademarks CANopen® and PROFIBUS® are registered trademarks of the respective trademark owners in certain countries.
4 Festo GDCP-CMXR-C2-SY-EN 1501c

Instructions on this documentation
This description includes specific information about the system of the multi-axis control system CMXR-C2 with the software version Version 1.0. In addition to the actual multi-axis control system, this system also includes the operator unit CDSA-D1-VX and its emulation via software as a PC application.
Identification of dangers and instructions on how to avoid them:
Warning
Dangers which can lead to death or serious injuries.
Caution
Dangers which can lead to slight injuries or to serious material damage.
Other symbols:
Note
Material damage or failure of function.
Recommendation, tip, reference to other documentation.
Necessary or useful accessories.
Information on environmentally friendly use.
Text designations:
Activities that can be carried out in any order.
1. Activities which should be carried out in the specified sequence.
− General lists.
Festo GDCP-CMXR-C2-SY-EN 1501c 5

Terms and abbreviations used
Term/abbreviation Significance
CDSA emulation Emulation of the functions of the operator unit on a PC Central control unit Basic unit of the CMXR multi-axis control system CoDeSys Integrated PLC (process control) DriveBus Channel of communication between the multi-axis control system and Festo
motor controllers, based on CANopen DS402 FCT plug-in Software module for a specific device in the Festo Configuration Tool Festo Configuration Tool (FCT)
Parametrisation and commissioning software for Festo drives
FTL Festo Teach Language, movement-oriented programming language for the CMXR multi-axis control system
Memory card Compact Flash Card CF Type I Multi-axis control system Central control unit with connected peripheral modules Operator unit Device for commissioning and operation of the multi-axis control system TCP Tool centre point
Table 1.3 Terms and abbreviations used
Additional documentation
The total functionality of the multi-axis control system CMXR-C2 is described in the following documents:
Name Contents
GDCP-CMXR-C2-SY-… System description (this document) GDCP-CMXR-C2-HW-… Mounting and installation GDCP-CMXR-SW-… Programming instructions for CMXR FTL base GDCP-CMXR-C2-ST-… Programming instructions for tracking GDCP-CMXR-C2-CS-… Programming with CoDeSys
Table 1.4 Further documentation – CMXR-C2 multi-axis control system
The operator unit CDSA-D1-VX also has additional documents available:
Name Contents
GDCP-CDSA-SY-… Mounting and installation GDCP-CDSA-SW-… Software manual
Table 1.5 Additional documentation – operator unit CDSA-D1-VX
The listed documents are available for download in the Festo Support Portal ( www.festo.com/sp).
6 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 5 dem Text zuzuweisen, der hier angezeigt werden soll.
Table of contents
1. Safety and requirements for product use ............................................................ 10
1.1 Safety ................................................................................................................ 10
1.1.1 General safety information ................................................................. 10
1.1.2 Intended use ...................................................................................... 11
1.2 Requirements for product use............................................................................ 12
1.2.1 Qualification of specialized personnel ................................................ 12
2. Multi-axis control system CMXR-C2 .................................................................... 13
2.1 Central control unit CMXR-C2 ............................................................................. 14
2.2 Memory card ..................................................................................................... 15
2.2.1 File system ......................................................................................... 16
2.2.2 Application directory .......................................................................... 17
2.3 CAN interfaces [X4]/[X6] ..................................................................................... 17
2.4 Ethernet interfaces [X5]/[X7] .............................................................................. 17
2.4.1 IP address on delivery ........................................................................ 18
2.5 USB interfaces [X8]/[X10] ................................................................................... 18
2.6 Serial interface [X3]/[X9] .................................................................................... 18
2.7 Peripheral modules ........................................................................................... 19
2.7.1 Addressing the peripheral modules .................................................... 20
2.7.2 Card modules ..................................................................................... 20
2.7.3 Front panel plug ................................................................................. 21
3. Configuration with FCT ........................................................................................ 22
4. Festo Teach Language (FTL) ................................................................................ 23
4.1 Program processing ........................................................................................... 24
4.1.1 Downloading FTL programs ................................................................ 24
5. Operator unit CDSA-D1-VX .................................................................................. 25
5.1 Installation ........................................................................................................ 27
5.2 Interface housing CAMI-C ................................................................................... 28
5.3 Unplugging the operator unit ............................................................................. 29
5.4 Hardware overview ............................................................................................ 30
5.5 User interface .................................................................................................... 31
Festo GDCP-CMXR-C2-SY-EN 1501c 7
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 5 dem Text zuzuweisen, der hier angezeigt werden soll.
5.6 User rights ......................................................................................................... 32
5.6.1 User level ........................................................................................... 33
5.6.2 Set users on delivery .......................................................................... 35
5.7 Communication with the multi-axis control system ............................................ 36
5.7.1 Synchronisation of dialogue software ................................................. 36
5.8 IP addresses on delivery .................................................................................... 36
5.9 Screen control ................................................................................................... 37
5.10 CDSA emulation ................................................................................................. 37
6. Drive systems ...................................................................................................... 38
6.1 Configuration of the motor controllers ............................................................... 38
6.2 CAN bus address for motor controllers ............................................................... 38
7. Operating modes ................................................................................................. 39
7.1 Manual override ................................................................................................ 39
7.2 automatic mode ................................................................................................ 40
7.3 Stopping the kinematics, emergency stop ......................................................... 40
7.4 Repositioning .................................................................................................... 41
8. Actuation method ................................................................................................ 43
8.1 Stand-alone mode ............................................................................................. 43
8.1.1 System signals ................................................................................... 44
8.2 Master control and write permission .................................................................. 45
8.2.1 Mode of operation .............................................................................. 45
8.2.2 User level ........................................................................................... 46
8.2.3 Influence of master control ................................................................. 46
8.2.4 Integration example ........................................................................... 47
9. Coordinate systems ............................................................................................. 48
9.1 Axis coordinate systems .................................................................................... 48
9.2 Cartesian coordinate systems ............................................................................ 48
9.2.1 Translatory axes X, Y, Z ....................................................................... 49
9.2.2 Orientation axes A, B, C ...................................................................... 49
9.2.3 Euler orientation ZYZ .......................................................................... 50
9.3 Coordinate systems for the kinematics .............................................................. 51
9.3.1 Base coordinate system ..................................................................... 51
8 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 5 dem Text zuzuweisen, der hier angezeigt werden soll.
9.3.2 World coordinate system .................................................................... 52
9.3.3 Tool coordinate system ...................................................................... 53
9.3.4 Working with the tool coordinate system ............................................ 54
10. Supported kinematic systems ............................................................................. 55
10.1 Configuration of kinematic systems ................................................................... 55
10.1.1 Base axes ........................................................................................... 55
10.1.2 Orientation axes (wrist axes) .............................................................. 56
10.1.3 Adjustment of orientation axes ........................................................... 57
10.1.4 Interpolation of orientation axes ........................................................ 58
10.1.5 Electric and pneumatic manual axes ................................................... 60
10.1.6 Auxiliary Axes ..................................................................................... 61
10.1.7 Programming the manual and auxiliary axes ....................................... 62
10.1.8 Designation of axis sequence for kinematics ...................................... 62
10.2 Cartesian linear gantry ....................................................................................... 63
10.3 Cartesian planar surface gantry ......................................................................... 65
10.4 Cartesian three-dimensional gantry ................................................................... 66
10.5 Parallel kinematic system EXPT .......................................................................... 68
10.5.1 Origin of the tool coordinate system ................................................... 70
10.6 Linear gantry EXCT ............................................................................................. 71
10.7 Planar surface gantry EXCH ................................................................................ 72
10.8 Axis interpolation .............................................................................................. 74
10.9 Overview of all supported kinematics ................................................................ 75
A. Index ................................................................................................................... 76
Festo GDCP-CMXR-C2-SY-EN 1501c 9
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
1. Safety and requirements for product use
1.1 Safety
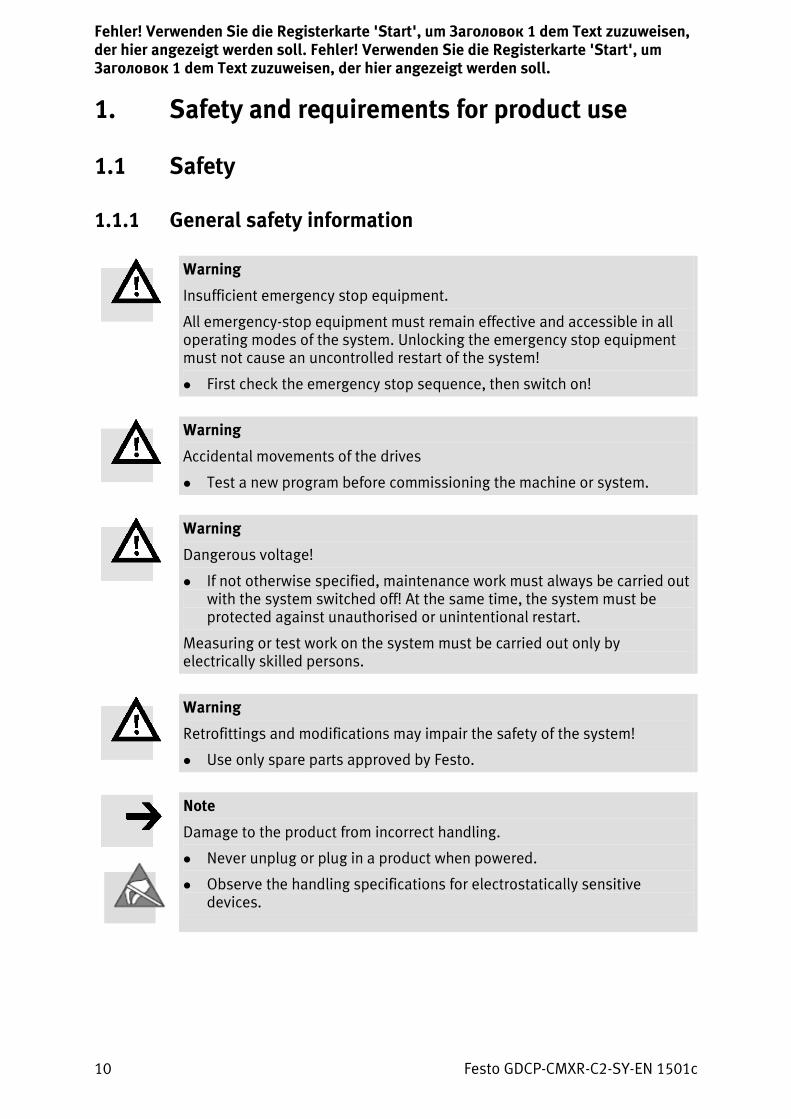
1.1.1 General safety information
Warning
Insufficient emergency stop equipment.
All emergency-stop equipment must remain effective and accessible in all operating modes of the system. Unlocking the emergency stop equipment must not cause an uncontrolled restart of the system!
First check the emergency stop sequence, then switch on!
Warning
Accidental movements of the drives
Test a new program before commissioning the machine or system.
Warning
Dangerous voltage!
If not otherwise specified, maintenance work must always be carried out with the system switched off! At the same time, the system must be protected against unauthorised or unintentional restart.
Measuring or test work on the system must be carried out only by electrically skilled persons.
Warning
Retrofittings and modifications may impair the safety of the system!
Use only spare parts approved by Festo.
Note
Damage to the product from incorrect handling.
Never unplug or plug in a product when powered.
Observe the handling specifications for electrostatically sensitive devices.
10 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
Notes for EMC-compliant installation should be taken from the description “Mounting and installation” ( GDCP-CMXR-C2-HW-…).
1.1.2 Intended use The CMXR multi-axis control system is intended for operating a kinematic system in the environment of a machine or automated system.
Use the multi-axis control system only as follows:
− in perfect technical condition
− in original status without unauthorised modifications, except for the adaptations described in this documentation
− within the limits of the product defined through the technical data
− in an industrial environment.
Warning
The CMXR multi-axis control system is not designed for safety-relevant control tasks (e.g. emergency stop or monitoring of reduced speeds).
The CMXR multi-axis control system conforms to category B of EN ISO 13849-1 and is thus not sufficient for the implementation of safety functions for the protection of persons.
Additional external protective measures that ensure the safe operating status of the entire system even in the event of a malfunction must be adopted for safety-relevant control tasks or for the safety of persons.
Note
In the event of damage caused by unauthorised manipulation or other than intended use, the guarantee is invalidated and the manufacturer is not liable for damages.
Festo GDCP-CMXR-C2-SY-EN 1501c 11

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
1.2 Requirements for product use Provide this documentation to the following persons:
− design engineer
− installer
− commissioner of the machine or system
Comply with the specifications of the documentation. Follow all accompanying documentation and the documentation of any associated accessories.
Take the following into consideration for the destination:
− applicable legal regulations
− regulations and standards
− regulations of the testing organisations and insurers
− national specifications
For correct and safe use:
Observe all warnings and notes.
Comply with all load limits of the product and the connected components.
1.2.1 Qualification of specialized personnel The product should only be installed by specialized personnel with corresponding
qualifications.
The following knowledge is required:
− installation and operation of electrical control systems
− applicable regulations for operating safety-engineering systems
− applicable regulations for accident prevention and occupational safety
− documentation and mode of operation of the product.
12 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
2. Multi-axis control system CMXR-C2 The multi-axis control system CMXR-C2 is a modular control system composed of a central control unit CMXR-C2 with various communication interfaces, input and output modules and an operator unit.
The multi-axis control system CMXR-C2 is used for activating kinematics from the Festo Modular System for Handling and Assembly Technology as well as additional axes and peripheral equipment. Programming is done in the language FTL (Festo Teach Language). The multi-axis control system CMXR-C2 is especially suitable for tracking tasks; for parts recognition, vision sensors (e.g. camera) can be connected.
All the examples and applications used in this documentation are non-binding and do not lay claim to be correct and complete. All the necessary regulations must be observed when using the CMXR multi-axis control system.
Festo GDCP-CMXR-C2-SY-EN 1501c 13

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
2.1 Central control unit CMXR-C2 The CMXR-C2 central control unit is an intelligent processor module that is responsible for the processing of user programs. The following illustration shows the standard design of the central control unit at delivery.
1 DVI interface [X1]
2 Power supply [X2]
3 Slot [X3]
4 CAN interface [X4]
5 Ethernet interface [X5]
6 CAN interface [X6]
7 Ethernet interface [X7]
8 USB interface [X8]
9 Serial interface [X9]
aJ USB interface [X10]
aA 7-segments display
Fig. 2.1 Central control unit CMXR-C2 (standard design)
Designation Description
DVI interface [X1] Currently not used Power supply [X2] For connecting the voltage supply 24 V DC Slot [X3] Free slot for serial interface (optional) CAN interface [X4] For connection of peripheral devices under CoDeSys (e.g. valve terminal) Ethernet interface [X5] Local interface without gateway, preferably for commissioning CAN interface [X6] Interface to the motor controllers via the DriveBus Ethernet interface [X7] General interface with gateway, for network and commissioning USB interface [X8] For saving and restoring programs as well as pulling out diagnostic
information for servicing purposes. Refer to the software manual of the operator unit for more information ( GDCP-CDSA-SW-…).
Serial interface [X9] For use with CoDeSys USB interface [X10] Reserved for later extensions 7-segments display For display of diagnostic information
Table 2.1 central control unit CMXR-C2
6
7
9
aJ
2
8
5
4
3
aA
1
14 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
2.2 Memory card The data for the multi-axis control system are saved on a memory card. This includes all data required for the operation, such as the operating system, configuration data and movement programs.
Note
Using the memory card for other purposes is not permitted. Doing so can impair the functionality of the storage medium.
Recommendation for maintaining compatibility
Use the Festo memory cards recommended in the hardware description ( GDCP-CMXR-C2-HW-…).
The memory card is inserted in the relevant slot of the central control unit.
Note
To eject or insert the memory card, always make sure the central control unit is disconnected from the power supply.
To create backup copies, the memory card can be copied using a PC with a card reader or through the Festo Configuration Tool (FCT). If service is required, due to a defect in the CMXR hardware or memory card, for example, the defective part can simply be replaced.
Festo GDCP-CMXR-C2-SY-EN 1501c 15

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
2.2.1 File system The memory card has a directory structure, in which the data, such as configuration, program and system data, can be stored. These directories are created during the installation of the multi-axis control system and must not be changed or added to.
Note
Loss of function if the directory structure is manipulated. The directory structure stored on the memory card must not be changed or supplemented.
Directory structure on the memory card:
Directory name Significance
application File for all user data (configuration, programs and program data) protocol File for report files system System directory systemsettings System directory terminal System directory
Table 2.2 File directories on the memory card
With the aid of the Festo Configuration Tool (FCT), all system data, the configuration and the FTL programs required for the operation are generated and stored on the memory card.
All necessary user data for an application are stored in the “application” directory.
16 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
2.2.2 Application directory All configuration data, FTL project data and program data are stored in the “application\control” directory.
Directory structure of the application directory:
The application directory includes a “control” directory. This is divided into the following directories:
Directory name Significance
config Target directory of the application configuration ieccontrol Data for CoDeSys teachcontrol Contains all FTL projects text Contains message texts of the application
Table 2.3 Application directory
The “teachcontrol” directory contains all FTL projects, each of which are represented by a directory. All FTL programs assigned to the project are located in this project directory. In the above directory tree, the projects “_global” and “cube” are created.
2.3 CAN interfaces [X4]/[X6] Other peripheral equipment, such as the Festo electrical I/O units or valve terminals, can be connected via the CAN interface [X4].
Configuration and programming are done through CoDeSys.
The CAN interface [X6] is reserved for communication with the motor controllers of the kinematics via the DriveBus. Another use is not possible.
2.4 Ethernet interfaces [X5]/[X7] The multi-axis control system CMXR-C2 has two Ethernet interfaces (RJ45):
− [X5] without gateway for local networks
− [X7] with gateway for higher-level networks
Note
The interfaces [X5] and [X7] must not be located in the same network.
Festo GDCP-CMXR-C2-SY-EN 1501c 17

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
2.4.1 IP address on delivery In the delivery status, the multi-axis control system has a minimal installation on the memory card, so that the network connection can be established after connection to the power supply. The network settings are pre-assigned as follows:
− [X5] deactivated
− [X7] activated
Network parameter [X7] Value
IP address 192.168.100.100 Subnet mask 255.255.255.0 Gateway address 0.0.0.0
Table 2.4 Preset network parameters [X7]
The CMXR-C2 multi-axis control system is not DHCP-capable.
To establish a connection to the multi-axis control system, the corresponding network settings have to be undertaken on the PC.
The use of an EtherCat switch is recommended for minimising the load for the EtherCat network.
2.5 USB interfaces [X8]/[X10] The multi-axis control system CMXR-C2 has 2 USB interfaces:
− [X8] to save and restore programs as well and pull out diagnostic information for repair purposes.
− [X10] is reserved and cannot be used.
2.6 Serial interface [X3]/[X9] The multi-axis control system CMXR-C2 permits operation of two serial interfaces. Configuration and use of the interfaces takes place under CoDeSys.
The option slot [X3] is not equipped in the delivery status and serves to extend the multi-axis control system with an additional serial interface.
18 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
2.7 Peripheral modules The modular multi-axis control system can be expanded with peripheral modules. These are plugged in on the right side of the central control unit. The modules are connected via the system bus. The location of a peripheral module can be selected at will. Since each module has its own address, it can be identified uniquely.
A maximum of twelve peripheral modules can be plugged in to the CMXR-C2 multi-axis control system.
Designation Significance FTL CoDeSys
CECX-D-16E Digital input module with 16 inputs x x CECX-D-14A-2 Digital output module with 14 outputs x x CECX-D-8E8A-NP-2 Digital I/O module with 8 inputs and 8 outputs x x CECX-A-4E4A-V Analogue I/O module with 4 inputs and 4 outputs for voltage x x CECX-A-4E4A-A Analogue I/O module with 4 inputs and 4 outputs for current x x CECX-C-2G2 Encoder module with two inputs x x CECX-D-6E8A-PN-2 Digital I/O module in NPN technology x x CECX-E-4E-T-P1 Analogue input module with 4 inputs for temperature measurement x x CECX-E-6E-T-P2 Analogue input module with 6 inputs for temperature measurement x x CECX-F-PB-V1 Fieldbus interface for Profibus DP V1 (master) x CECX-F-PB-S-V1 Fieldbus interface for Profibus DP V1 (slave) x
Table 2.5 Peripheral modules CMXR-C2
The fieldbus interface for PROFIBUS DP V0 (slave) may be used only once in the system.
Designing of the modules is carried out through the Festo Configuration Tool (FCT). For use of modules in FTL programs, refer to the programming instructions ( GDCP-CMXR-SW-…).
Festo GDCP-CMXR-C2-SY-EN 1501c 19

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
2.7.1 Addressing the peripheral modules The module address is set using an appropriate tool over a rotary switch on the module. This is located under a cover on the right side.
1 Bus plug (behind cover)
2 Recess for H-rail
3 Address switch (module address)
4 H-rail locking lever
The fieldbus interface CECX-F-PB-S-V0 does not have a rotary switch, since only one module of this type may be installed in the system.
Note
Each address may only be used once within a module type.
The same addresses are allowed in different modules.
2.7.2 Card modules The central control unit has 3 slots [X3] … [X5] for card modules. Of these, [X4] and [X5] are already equipped in the delivery status and belong by definition permanently to the actual central control unit.
The slot [X3] is reserved for expansion with a serial interface.
Designation Significance FTL CoDeSys
CECX-F-CO CAN bus interface [X4] x CECX-S-S4 Electrical interface RS485/422 [X3] x
Table 2.6 Card modules
4
1
2
3
20 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
2.7.3 Front panel plug Standard plugs with a grid dimension of 5.08 mm are needed for the power supply and for connecting the digital and analogue signal cables.
Encoder signals are connected via a Sub-D plug, the fieldbuses (CAN and PROFIBUS) via appropriate, approved fieldbus plugs.
The following table shows the required plug combinations and a selection of plugs. The number of pins can be selected differently, depending on the requirement.
Peripheral module Plug type Number
CMXR-C2 2-pin for power supply 9-pin Sub-D (socket) for each CAN bus RJ45 plug connector for EtherCat
1 1 … 2 1 … 2
CECX-D-16E CECX-D-8E8A-NP-2 CECX-D-6E8A-PN-2 CECX-A-4E4A-V CECX-A-4E4A-A CECX-E-4E-T-P1
2-pin for power supply 8-pin for signals
1 2
CECX-D-14A-2 2-pin for power supply 8-pin for signals 6-pin for signals
2 1 1
CECX-E-6E-T-P2 6-pin for signals 2 CECX-C-2G2 2-pin for power supply
2-pin for latch signals 9-pin Sub-D (socket) for encoder
1 1 2
CECX-F-PB-V1 CECX-F-PB-S-V1
9-pin Sub-D (plug connector) for PROFIBUS 1
Table 2.7 Plug connector for peripheral modules
For connecting the power supply, 2-pin plug connectors are recommended. If signal cables have to be disconnected for commissioning, the power supply for the modules is maintained.
You can find available plug connectors in the Internet ( www.festo.com/catalogue).
Festo GDCP-CMXR-C2-SY-EN 1501c 21

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
3. Configuration with FCT Configuration of the multi-axis control system is carried out using the Festo Configuration Tool (FCT). This software has graphically supported dialogue pages for a guided input of the required data.
Example of a configuration page of the FCT:
The Festo Configuration Tool (FCT) is used, for example, to configure the following points:
− central control unit CMXR-C2
− peripheral signals
− control interface
− selection of the kinematics
− data for axis dynamics
Detailed information for configuration of the multi-axis control system with the Festo Configuration Tool can be taken from the Help files of the CMXR-FCT plug-in.
22 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
4. Festo Teach Language (FTL) The movement programs for the multi-axis control system CMXR are written using the text-based programming language Festo Teach Language (FTL). FTL provides a high-performance command set, e.g. for movements, dynamic response, branches, loops and the integration of peripheral signals. The FTL program is processed by an interpreter in the multi-axis control system.
The FTL programs can be programmed offline and online. The FTL Editor in the Festo Configuration Tool performs offline programming. The operator unit CDSA-D1-VX performs online programming.
Detailed information on the Festo Teach Language programming language can be taken from the programming instructions ( GDCP-CMXR-SW-…).
Example for an FTL program in the FCT plug-in
Example for an FTL program on the operator unit
Festo GDCP-CMXR-C2-SY-EN 1501c 23
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
4.1 Program processing An FTL program is processed by an interpreter in the multi-axis control system. This permits fast revisions of the program with immediate effect. The FTL programs are not processed from the memory card, but from the internal memory of the multi-axis control system.
To start a program, it must already be loaded from the memory card into the internal memory of the multi-axis control system.
The maximum number of positions in a project is limited to about 10000 by the storage capacity of the central control unit CMXR-C2.
Exceeding the storage capacity is reported as an error.
4.1.1 Downloading FTL programs FTL programs are normally written with the CMXR plug-in in the Festo Configuration Tool and then transferred to the memory card of the multi-axis control system by download.
The memory card can also be accessed over an Ethernet connection with the IP address of the central control unit. In this way, FTL programs can be stored directly onto a memory card located in the central control unit.
The FTL programs can be loaded and started by an external control system. To start the programs from the operator unit, the FTL project has to be unloaded and then loaded again.
− FTL programs may only be stored in the “application\control\teachcontrol” directory on the memory card.
− An FTL program transferred to the memory card must always be loaded into the internal memory of the multi-axis control system in order to start it.
− Simultaneous overwriting and loading of an FTL program must be prevented.
− If the download and start of FTL programs is to be executed automatically, interlocks should be used to ensure that no malfunctions occur. This can, for example, be done via an interface to a higher-level system.
An active, loaded FTL program is not automatically updated in the internal memory of the multi-axis control system by downloading it to the memory card.
To update the data, the FTL project must first be unloaded via the operator unit or an external controller and then loaded again.
24 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
5. Operator unit CDSA-D1-VX All operations – even programming – can be carried out with the help of the mobile operator unit CDSA-D1-VX. A largely functionally equivalent CDSA emulation is available for use on a PC.
The following illustration shows the operator unit from the front side:
1 Emergency stop switch
2 Touch pin
3 Start and stop buttons
4 Pushbuttons for jog operation
5 Buttons for selecting functions
6 Coloured touch screen
7 Display LEDs
8 USB interface (under cover)
Fig. 5.1 Operator unit CDSA - front side
Designation Description
Emergency stop switch 2-channel emergency stop switch in accordance with category 3, for integration into the customer-provided emergency stop circuit
Touch pin Pin for operating the touch screen Start and stop buttons For starting and stopping the movement program Pushbuttons for jog operation For moving the axes in different coordinate systems Buttons for function selection For selecting various functions, such as coordinate systems, position
display, programming Display LEDs Status indicator, e.g. error Touch screen 6.5-inch TFT colour display with touch screen, which can be operated by
finger or touch pin USB interface For import and export of FTL programs and status reports
Table 5.1 Functions of operator unit CDSA - front side
1
2
4
6
3
5
5
8
7
Festo GDCP-CMXR-C2-SY-EN 1501c 25

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
The following illustration shows the CDSA operator unit from the reverse side:
1 Handle
2 Enabling button
3 Cable outlet
Fig. 5.2 Operator unit CDSA - reverse side
Function Description
Handle For right- and left-handed people Enabling button 3-step, 2-channel, prepared for the customer’s own safety circuit Cable outlet Freely selectable right or left
Table 5.2 Functions of operator unit CDSA - reverse side
1
3
2
3
2
26 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
5.1 Installation Communication between the operator unit and the multi-axis control system takes place over an Ethernet connection. Serving as an interface is the interface housing CAMI-C.
We recommend use of a switch for the Ethernet connection. This is the only way a PC (with FCT software) and an operator unit can be connected up simultaneously.
Installation overview of operator unit:
1 Control cabinet
2 Multi-axis control system
3 Ethernet cable (crossover/with switch)
4 Interface housing CAMI-C
5 Jumper plug CAMF-B
6 Cable NESC-C-D1-x-C1
7 Operator unit CDSA-D1-VX
Fig. 5.3 Installation - operator unit CDSA
1
2
3
4
7
6
5
Festo GDCP-CMXR-C2-SY-EN 1501c 27

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
5.2 Interface housing CAMI-C The operator unit is connected to the multi-axis control system via the CAMI-C interface housing. The interface housing is normally installed at the control cabinet.
Refer to the corresponding documentation for detailed information on installation.
The interface housing has the following connections:
− Ethernet connection (communication between multi-axis control system and operator unit)
− Contact strip for
− Power supply for the operator unit (24 V DC)
− Connection of the emergency stop switch (2-channel)
− Connection of the enabling button (2-channel)
1 Contact strip (11-pin)
2 Sub-D plug connector (9-pin), not used
3 Retaining nut
4 Connection for operator unit
5 Control cabinet panel
6 Ethernet connection
Fig. 5.4 Interface housing CAMI-C
1
2
6
5
4
3
28 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
5.3 Unplugging the operator unit If the multi-axis control system is controlled via an external control system, the operator unit is not absolutely required. The operator unit can be unplugged after completion of programming and commissioning.
Unplugging the operator unit interrupts the emergency stop circuit and an emergency stop situation is present. This cannot be acknowledged due to an open emergency stop circuit.
The jumper plug CAMF-B-M25-G4 is available for bypassing the emergency stop circuit opened after the operator unit is unplugged. This is screwed onto the port of the interface housing in place of the operator unit.
The jumper plug has two internal jumpers, with which the 2-channel emergency stop circuit is closed and the emergency stop situation acknowledged.
1 Jumper plug (screwed onto the interface housing)
2 Wire cable with eyelet for mounting
3 Jumper plug
Fig. 5.5 CAMF-B-M25-G4 jumper plug
A solution which allows the operator unit to be unplugged without interrupting the emergency stop circuit is not planned. This would require taking the whole installation into consideration and, with it, the applicable safety regulations. If this is required, then the customer has to find a special solution in agreement with the required safety regulations.
Caution
The operator is obligated to remove disconnected operator units so that inadvertent actuation of the inactive emergency stop switch is not possible.
1
2
3
Festo GDCP-CMXR-C2-SY-EN 1501c 29

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
5.4 Hardware overview A pre-assembled cable in various lengths is available for connecting the operating unit to the interface housing. Also available is the jumper plug for bypassing the emergency stop signals in the unplugged status as well as a wall bracket with a cable holder for putting operator unit down.
Type Significance
CDSA-D1-VX Operator unit NESC-C-D1-5-C1 Pre-assembled connecting cable, length 5 m NESC-C-D1-10-C1 Pre-assembled connecting cable, length 10 m NESC-C-D1-15-C1 Pre-assembled connecting cable, length 15 m CAMI-C Interface housing NECC-L1G11-C1 11-pin plug connector for interface housing CAMF-B-M25-G4 Jumper plug for interface housing CAFM-D1-W Holder with retainer for cable
Table 5.3 Hardware overview of operator unit
Pre-assembled cable NESC-C-D1-xx-C1
Holder CAFM-D1-W Interface housing CAMI-C
30 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
5.5 User interface The operator unit has an intuitively constructed, graphic user interface. No programming or technical computer knowledge is required for operation.
All contents are available in German and English. The language is selected within the software of the operator unit, without having to restart the system.
Example - cursor:
Example - program editor
Refer to the software manual of the operator unit for detailed information ( GDCP-CDSA-SW-…).
Festo GDCP-CMXR-C2-SY-EN 1501c 31
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
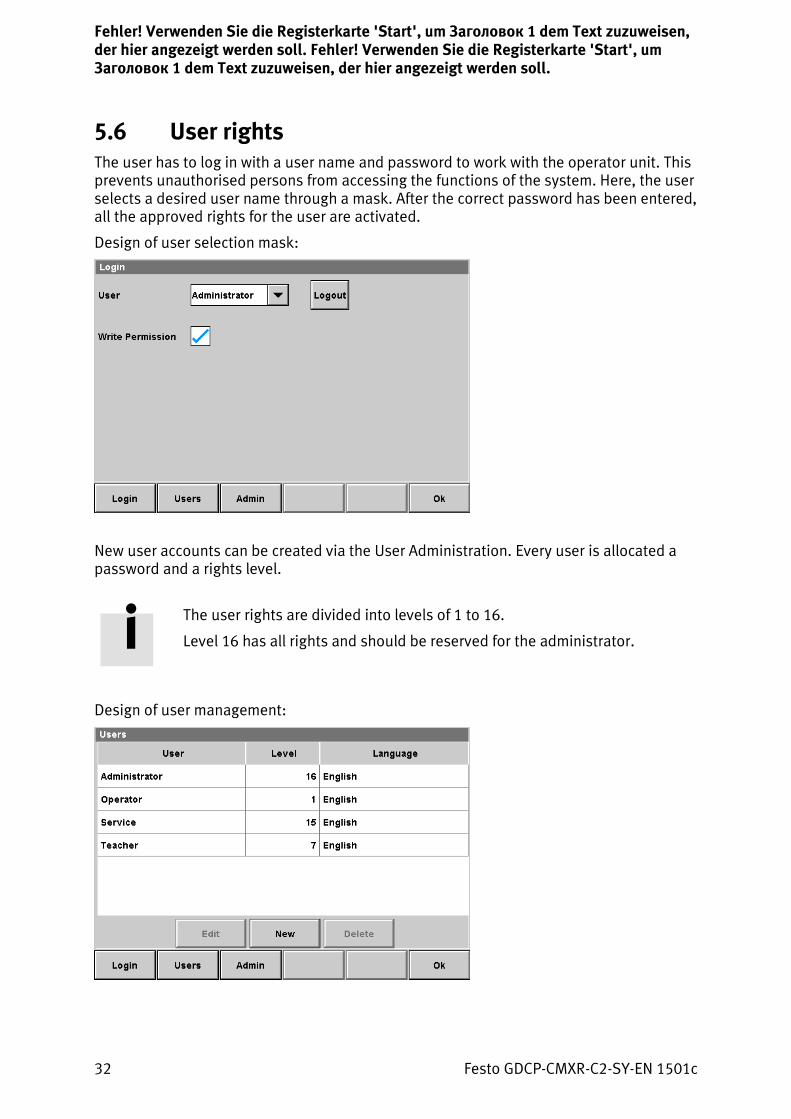
5.6 User rights The user has to log in with a user name and password to work with the operator unit. This prevents unauthorised persons from accessing the functions of the system. Here, the user selects a desired user name through a mask. After the correct password has been entered, all the approved rights for the user are activated.
Design of user selection mask:
New user accounts can be created via the User Administration. Every user is allocated a password and a rights level.
The user rights are divided into levels of 1 to 16.
Level 16 has all rights and should be reserved for the administrator.
Design of user management:
32 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
5.6.1 User level In the multi-axis control system, a user level consisting of several levels between 1 and 15 can be allocated to every user. The highest level 16 has no restrictions and should be reserved for the administrator.
List of functions with the required user level:
Menu button Function Level Write
Setup Settings mask 1 – User User mask 1 – Display Setting display properties 1 – System Pop-up menu for system settings 15 – Block Disables the touch function for 10 seconds 1 – Report Service area 1 Yes I/O monitor Displays the input and output signals 7 –
Table 5.4 Service area
Menu button Function Level Write
Variables Monitor mask for variables 1 – Variable Pop-up menu for manipulating 7 Yes Clean up Deletes unused variables 7 Yes Check use Check use of variables 7 Yes Teach Teach position variables at the current position 7 Yes
Table 5.5 Variable function
Menu button Function Level Write
Project Project mask 1 – Load Load project/program 1 Yes Open Open project/program (translate only) 1 Yes Close/End Close project/end program 1 Yes Info Display program information 1 – Update Update project view 1 – File File manipulation functions 7 Yes Design Execution mask 1 – View Display selected program 1 – Step/Cont Switching step/continue 7 Yes Exit Exit the program 1 Yes
Table 5.6 Project functions
Festo GDCP-CMXR-C2-SY-EN 1501c 33

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
Menu button Function Level Write
Program Program mask 1 – Modify Modify selected program line 7 Yes Macro Repeat last insertion command 7 Yes New Insert new FTL command 7 Yes PC Set sentence pointer 7 Yes Step/Cont Switching step/continue 7 Yes Process Program processing functions 7 Yes Selection Select lines for cutting out or copying 7 Yes Delete Delete selected lines 7 Yes Undo Undo the last operation 7 Yes Text editor Text editor mask 7 Yes
Table 5.7 Program functions
Menu button Function Level Write
Positions Robot position mask 1 – Drives Display drive positions 1 – Axes Display robot axis positions 1 – World Display positions in the World coordinates 1 – Object Display positions in the Object coordinates 1 – V-Jog Set jogging speed 1 Yes Jog Set Jog coordinate system 1 Yes
Table 5.8 Robot status und functions
Menu button Function Level Write
Messages Message mask 1 – Acknowledge Acknowledge selected message 1 Yes All Acknowledge all messages 1 Yes Display ID display of ID numbers instead of texts 1 Help Display Help for selected message 1 – Message Mask for message log 1 – Display ID display of ID numbers instead of texts 1 Help Display help for selected message 1 –
Table 5.9 Message functions
34 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
5.6.2 Set users on delivery Four users are automatically created during installation of the multi-axis control system. These users serve as a basis for further settings.
Users can be created, modified or deleted via the privileged “Administrator” user.
Refer to the software manual of the operator unit for detailed information ( GDCP-CDSA-SW-…).
User name Password User level
Administrator admin 16 Service service 15 Teacher teacher 7 Operator operator 1
Table 5.10 Set users on installation
The “Service” user is required by the system and must not be deleted. It cannot be used for working on the system.
When the CMXR system is restarted or after the user has logged out, a so-called “default user” is activated that possesses Level 1. This user is set up internally and active only when no user from the supplied list is active.
After the system starts up, the “default user” is active with the language setting English.
The same users are available for accessing the multi-axis control system via a network connection. But the user rights are insignificant here. A network connection can be established with the relevant password through every user.
Festo GDCP-CMXR-C2-SY-EN 1501c 35

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
5.7 Communication with the multi-axis control system Communication between the operator unit and the multi-axis control system takes place via the Ethernet interface at the interface housing using permanently set IP addresses.
An interface housing is needed for every multi-axis control system to communicate with the operator unit.
Communication is only possible with the multi-axis control system to which the interface housing belongs, since the hardware signals of the enabling buttons have to be assigned to a kinematic system.
5.7.1 Synchronisation of dialogue software The dialogue software for the operator unit is stored on the memory card in the central control unit. To operate the operator unit, this software is loaded onto the operator unit and stored there.
Every time the operator unit is started up, the software versions on the operator unit and the memory card in the central control unit are compared with each other. If these versions differ, the software from the memory card is loaded into the operator unit.
5.8 IP addresses on delivery On delivery, the IP addressing of the operator unit is calibrated with the IP addressing of the multi-axis control system. If both these devices are operated together, without network integration, no settings of the IP addresses are necessary.
The devices are set as follows on delivery:
Network parameter Value
IP address (operator unit) 192.168.100.101 Subnet mask (operator unit) 255.255.255.0 Gateway address (operator unit) 0.0.0.0 Host IP (multi-axis control system) 192.168.100.100
Table 5.11 IP addresses on delivery
If the operator unit is integrated into a network, the network settings must be changed accordingly.
The multi-axis control system is not DHCP-capable.
The multi-axis control system cannot obtain an IP address from a DHCP server, but must be configured via FCT.
36 Festo GDCP-CMXR-C2-SY-EN 1501c
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
5.9 Screen control If no task is performed on the touchscreen for about 2 minutes, the background illumination is reduced to protect the display. The screen saver is activated after approx. 10 minutes.
Touching the display deactivates the reduced background illumination or screen saver and full illumination is activated.
5.10 CDSA emulation With the FCT plug-in CMXR, a CDSA emulation is installed on the PC. This emulation has functionally the same capacity as the operator unit and is operated in the same way.
Caution
The CDSA emulation is strictly a PC application. It does not have the safety equipment of the operator unit CDSA-D1-VX!
The emergency stop and enabling button function must be ensured in some other way!
Festo GDCP-CMXR-C2-SY-EN 1501c 37
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
6. Drive systems Only Festo motor controllers are used for operating the kinetics. Both servo motors and stepper motors from Festo can be used. The following Festo motor controllers are currently supported:
Type Significance
CMMS-AS Standard motor controller for servo motors CMMP-AS Premium motor controller for servo motors CMMD-AS Double motor controller for servo motors CMMS-ST Motor controller for stepper motors
Table 6.1 Supported Festo motor controllers
Communication with the motor controllers takes place via the Festo DriveBus, which is based on the CANopen DS402 profile – “interpolated position mode” operating mode.
Note
The node address of the kinematic axes is continuous and permanently specified by the system. Therefore, the CMMD-AS motor controller is used exclusively for successive axes of a kinematic system.
6.1 Configuration of the motor controllers Each motor controller is parameterised via the corresponding FCT plug-in. A basic functional commissioning of all axes is required prior to operation with the multi-axis control system.
Special features in the configuration:
Configuration Setting/special feature
Control interface DriveBus Error management The “HW limit switch” group must not be set to “Warn” or “Ignore”.
Table 6.2 Special features in the configuration
6.2 CAN bus address for motor controllers When communication takes place via the Festo DriveBus over the interface CAN X6, the multi-axis control system functions as master and all motor controllers are operated as slaves.
The CAN bus address for the motor controllers is determined and defined as follows:
− From CAN-ID 2 upward: motor controllers for all basic axes
− Continuous without gaps: motor controllers for all wrist axes
− Continuous without gaps: motor controllers for all auxiliary axes
If there are a maximum of six permissible axes, the CAN addresses 2 … 7 are assigned.
38 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
7. Operating modes The multi-axis control system has two operating modes:
− Manual override with reduced speed
− Automatic mode
The operating mode is selected via a digital input (e.g. key actuator). The active operating mode is displayed through a digital output signal.
Depending on regulations, the signals for the operating modes are generated via a safety-related logic, since under certain circumstances this safety-related logic must have the appropriate status for activating an operating mode.
7.1 Manual override In manual override, the kinematics can be moved manually, via the operator unit, for example. Pressing the enabling button is a requirement for this. This operating mode is used for setting up the kinematics and commissioning the programs. The speed is limited thereby.
The values for reduced speed are configured over the Festo Configuration Tool (FCT). Limits are specified for maximum speeds, depending on the parameter.
Caution
The reduced speed in manual override is not a safe function. Additional external protective measures that ensure the safe status of the entire system even in the event of a malfunction must be adopted for safety-relevant control tasks or for the safety of persons.
Functions in manual mode:
− Moving the kinematic system at reduced speed:
− For Cartesian movements, a maximum of 250 mm/s on the TCP
− For the movement of individual linear axes, a maximum of 250 mm/s
− For the movement of individual axes of rotation, it must taken into account for the projecting component that a speed of 250 mm/s is not exceeded at the longest end. The rotational speed of the axis must be calculated in proportion to this length and must be entered in the configuration.
− Teaching of positions
− Generating and modifying programs
− Testing programs in the step mode or continuous mode.
The integrated 2-channel, 3-stage enabling buttons are used for travel using the operator unit. These are connected to the multi-axis control system via a digital input.
Festo GDCP-CMXR-C2-SY-EN 1501c 39

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
7.2 automatic mode In automatic mode, all movements of the kinematics are carried out at full speed. All dynamic values set in the program are executed.
It is not possible to move the axes manually in automatic mode. The enabling buttons of the operator unit are not taken into account.
Caution
Considerable speeds can be generated in automatic mode. To execute this operating mode, the valid regulations and safety devices for operating the kinematics must be observed.
7.3 Stopping the kinematics, emergency stop The kinematics are stopped on the path. This means, that all the axes participating in the interpolation brake together until the kinematics are at rest. To do this, the multi-axis control system requires the emergency stop signal or the enabling button signal. If the multi-axis control system does not brake the participating axes on the path in a coordinated way, this could result in collisions, for example, with the tool.
A coordinated stop on the path can only take place if all the necessary axes for this are ready for operation, i.e. do not have any errors. If there is an error in the axis, the axis cannot be stopped true to the path. The axis normally stops the drive itself as a consequence of the error. In such a case, a deviation from the path will occur which cannot be influenced by the multi-axis control system.
Caution
An uncoordinated stop of the axes can trigger collisions, e.g. with the tool, since the path is deviated from.
The multi-axis control system needs time to stop the axes true to path. This period of time commences from the emergency stop signal until the power to the drives is shut down through a safety-related module after a defined and permissible duration. The multi-axis control system must stop the drives true to path within this time. If it does not succeed in doing this, the safety-related module will most certainly intervene and shut down the power to the drives.
Note
The multi-axis control system brakes with the maximum possible path values that are feasible due to the axis dynamics. This must be taken into account when calculating the braking time.
40 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
The following graph shows the signals for shutting down the drives and for the true-to-path stop of the kinematics axes:
A true-to-path stop is possible in the left part of the graph. In the right part, the drive power is shut down via the safety-related hardware, e.g. a 2-channel time relay.
Note
The applicable regulations must be observed when setting the delay time for shutting down the drive power via the hardware.
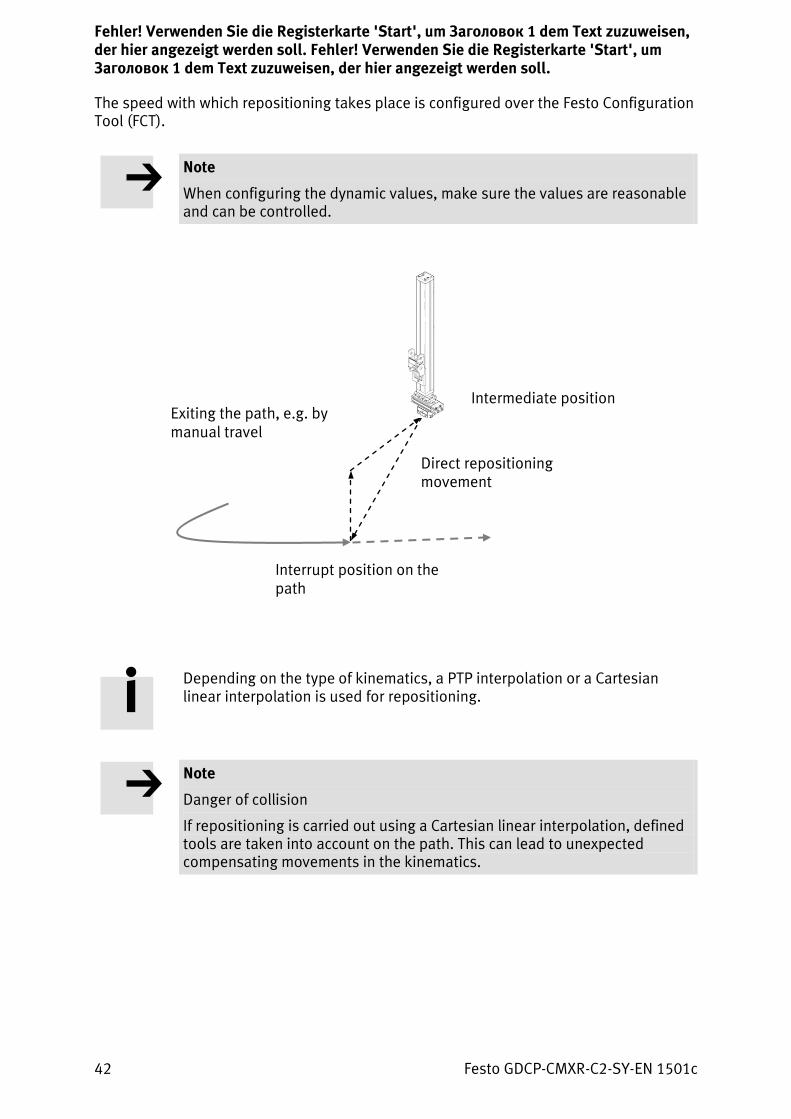
7.4 Repositioning The multi-axis control system has the “Repositioning” function. This is understood as the automatic approaching of a point where a program was interrupted and is now to be continued. A kinematic system can leave the path, for example, as a result of
− bending of the kinematics axes, e.g. when the brakes engage
− or manual travel of the
kinematics. After a program has been restarted, the kinematics travel directly from the actual position to the interrupt position.
Note
To minimise the danger of collisions, it is recommended that you move the kinematics manually into the proximity of the interruption position prior to repositioning. At the same time, any orientation axes should also be moved into the approximate orientation position they were in when the interruption took place.
Movement
Drive enable regulator
Emergency stop signal
Time suffices for true-to-path stop
t
Time does not suffice for true-to-path stop; axes are stopped via the drive regulator
t
Festo GDCP-CMXR-C2-SY-EN 1501c 41
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
The speed with which repositioning takes place is configured over the Festo Configuration Tool (FCT).
Note
When configuring the dynamic values, make sure the values are reasonable and can be controlled.
Depending on the type of kinematics, a PTP interpolation or a Cartesian linear interpolation is used for repositioning.
Note
Danger of collision
If repositioning is carried out using a Cartesian linear interpolation, defined tools are taken into account on the path. This can lead to unexpected compensating movements in the kinematics.
Intermediate position
Direct repositioning movement
Exiting the path, e.g. by manual travel
Interrupt position on the path
42 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
8. Actuation method The multi-axis control system CMXR-C2 can always be actuated via the integrated CoDeSys controller in addition to the operator unit. If an additional controller is to be assigned a higher order, this can be realised via the access routes digital I/O, PROFIBUS DP, Ethernet TCP/IP or CAN by means of CoDeSys modules.
The template “CMXR Stand-alone” is saved as the minimum configuration. Detailed information should be taken from the description “CMXR-C2 with CoDeSys” ( GDCP-CMXR-C2-CS-…).
8.1 Stand-alone mode In stand-alone mode, the movement control is controlled by the operator unit. Only some important signals have to be additionally transmitted via the internal PLC and its RC interface to the controller. The signals are mapped in the CoDeSys project template directly onto the configured first I/O module. The project can then be loaded and started directly on the controller without any expansion.
The system signals can also be processed directly in CoDeSys. In this case, an I/O module is not absolutely required
The following illustration shows an example for installation in stand-alone mode:
In this example, the drive enable is triggered via the safety engineering equipment. This logic element has the capacity to set a time delay for the delayed shutdown of the drive enable. The feedback signal for the active operating mode or the presence of an error can be displayed via a signaling element, e.g. a lamp.
CMXR-C2 Example of safety engineering
Interface housing CAMI-C Operator unit CDSA
Automatic operating mode
Manual operating mode
Emergency stop signal
Enabling button
Enabling button
Emergency stop signal
Additional emergency stop signals
2-channel design
Drives
Drive enable
Feedback signal for manual override operation mode
Ethernet
Feedback signal that error is active
Feedback signal for automatic operation mode
Festo GDCP-CMXR-C2-SY-EN 1501c 43

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
The following table shows all components needed for controlling a kinematic system in the “stand-alone mode”.
Type Significance Number
CMXR-C2 Central control unit 1 CECX-D-8E8A-NP-2 Digital input/output module with 8 inputs and 8 outputs 1 NECC-L1G2-C1 2-pin plug connector 2 NECC-L1G8-C1 8-pin plug connector 2 CDSA-D1-VX Operator unit 1 NESC-C-D1-5-C1 Cable for operator unit e.g. 5 m 1 CAMI-C Interface housing for operator unit 1 NECC-L1G11-C1 11-pin plug connector for interface housing 1
Table 8.1 Components for stand-alone mode with CoDeSys
8.1.1 System signals During configuration via the FCT, 3 inputs and 4 outputs are automatically pre-assigned for system signals at the input/output module CECX-D-8E8A-NP-2.
Allocation of the system signals cannot be changed. The free inputs and outputs can be used as application signals. Assignment is carried out via the Festo Configuration Tool (FCT).
Signal Signal name Significance
Output 0 doutError Error active Output 1 Freely usable Output 2 doutAutoSelected Automatic operation mode active Output 3 doutManSelected Manual operation mode active Output 4 Freely usable Output 5 Freely usable Output 6 Freely usable Output 7 Freely usable Input 0 dinEmStop Emergency stop Input 1 dinEnabling Enabling button Input 2 dinAutoSelect Automatic operating mode Input 3 dinManSelect Manual operating mode Input 4 Freely usable Input 5 Freely usable Input 6 Freely usable Input 7 Freely usable
Table 8.2 Allocation of the system signals
44 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
8.2 Master control and write permission The multi-axis control system can be controlled via an internal PLC or the operator unit. To avoid any problems, only one of the devices has the right to actively control the multi-axis control system, e.g. to start programs. The active participant possesses master control and so has write permission. A passive observation role for each of the devices is always an option.
Only one device can actively control the multi-axis control system.
8.2.1 Mode of operation Master control is managed in the multi-axis control system. After running up the system, none of the controlling devices has master control and thus write permission. Master control must first be requested.
The request is carried out via a dialogue on the operator unit or a signal exchange with the internal PLC. All stations have the same rights. The device that requests first receives the master control.
If a device no longer needs the master control, it must return it to the administration. Removal of the master control is not possible.
The status of the master control of the operator unit is shown with the background colour in the field of the active user level:
− Background colour grey no master control/no write permission
− Background colour blue master control/write permission
These statuses are also transmitted on the interface for the external control system.
The following illustration shows the graphic representation on the operator unit.
Every controlling device must request the master control itself and return it as required. Removal of the master control is not possible.
If the communication with a device is interrupted, the master control is returned to administration after an internal timeout.
If there is no connection to an external control system and operation is carried out via the operator unit, master control has to be requested once on the operator unit after the control system has been started up.
Field of active user levels
Festo GDCP-CMXR-C2-SY-EN 1501c 45

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
8.2.2 User level The master control is independent of the operating mode and the user level for the operator unit. Even with user level 16 (Administrator), control can only take place using an active master control. A transfer of master control without prior return of master control by the controlling participant is not possible.
8.2.3 Influence of master control Master control influences the possible range of action of a participant. Each participant can always carry out passive actions, i.e. it can observe but not execute any influence on programs or the kinematics. Furthermore, the options are dependent upon the active interface.
The following table provides an overview of the active and passive functions of the individual connections and participants.
Function Operator unit CDSA CoDeSys
Active functions with write permission Jogging of axes X X Teaching of positions X X Starting and stopping programs X X Delete errors X X Passive functions without write permission Mode selection X Permission button signals, emergency stop X X Exchange of cyclical I/O data X Observing variables X X Writing variables X X
Table 8.3 Overview of active and passive functions
46 Festo GDCP-CMXR-C2-SY-EN 1501c
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
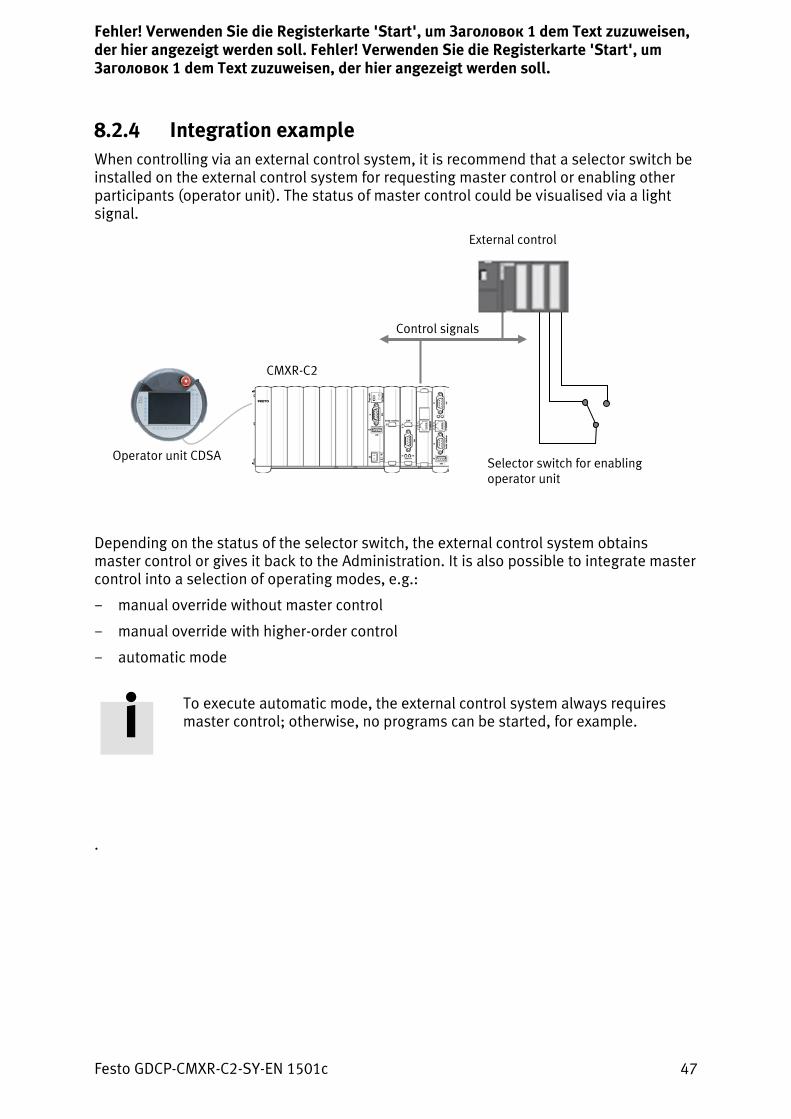
8.2.4 Integration example When controlling via an external control system, it is recommend that a selector switch be installed on the external control system for requesting master control or enabling other participants (operator unit). The status of master control could be visualised via a light signal.
Depending on the status of the selector switch, the external control system obtains master control or gives it back to the Administration. It is also possible to integrate master control into a selection of operating modes, e.g.:
− manual override without master control
− manual override with higher-order control
− automatic mode
To execute automatic mode, the external control system always requires master control; otherwise, no programs can be started, for example.
.
CMXR-C2
Operator unit CDSA
Control signals
External control
Selector switch for enabling operator unit
Festo GDCP-CMXR-C2-SY-EN 1501c 47

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
9. Coordinate systems
9.1 Axis coordinate systems The axis coordinate system is a coordinate system that takes into account all physical axes in a kinematic system. Each axis has a coordinate in the axis coordinate system. The origin of a coordinate is in the zero point of the assigned axis.
In this position, the axis coordinate system is bound to the form and location of the mechanical axes. This is determined by the mechanical design of the kinematics.
Examples:
The figure on the left shows the kinematics model of the Festo EXPT parallel kinematic system. The position of the axes and thus of the axis coordinate system is determined by the kinematics model.
The picture to the right shows a Cartesian kinematic system. This mechanical system also has an axis coordinate system, although the axes standing perpendicular to one another form a Cartesian system. In the axis coordinate system, the multi-axis control system does not take the kinematics model into account, but only the individual axes, which can be linear or rotary.
9.2 Cartesian coordinate systems A Cartesian coordinate system comprises three axes standing perpendicular to one another. The multi-axis control system uses a coordinate transformation to calculate the Cartesian world from the individual axis coordinates, based on the internal kinematics model.
A3
A2 A1
A1
A3
A2
48 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
9.2.1 Translatory axes X, Y, Z In the Cartesian coordinate system, the three axes X, Y and Z standing perpendicular to one another form the translatory axes.
These are defined in accordance with the right-hand rule.
The thumb points to the positive direction of the X-axis, the index finger to the positive direction of the Y-axis and the middle finger to the positive direction of the Z-axis.
With these three translatory axes, a tool, for example, can be moved or described in three directions in the available space. They are known as the three degrees of freedom.
9.2.2 Orientation axes A, B, C The position of a tool, for example, can be described with the translatory axes X, Y and Z. But if this tool also has an orientation, i.e. the tool has turned away from its original position, this cannot be expressed via the axes X, Y and Z.
To describe these orientations, axes of rotation (orientation axes) are needed in the Cartesian system. These execute a rotation around the translatory axes X, Y and Z.
The first axis of rotation in the Cartesian system is called “A”, the second axis of rotation “B” and the third “C”. How the sequence of rotations is executed in the Cartesian system is defined for the multi-axis control system in accordance with Euler orientation ZYZ.
The direction of rotation around an axis is defined by the right-fist rule.
This involves making a fist with the right hand and raising the thumb upwards.
In doing so, the thumb points in the positive axis direction, the fingers of the fist point in the positive direction of the rotation around this axis.
Festo GDCP-CMXR-C2-SY-EN 1501c 49
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
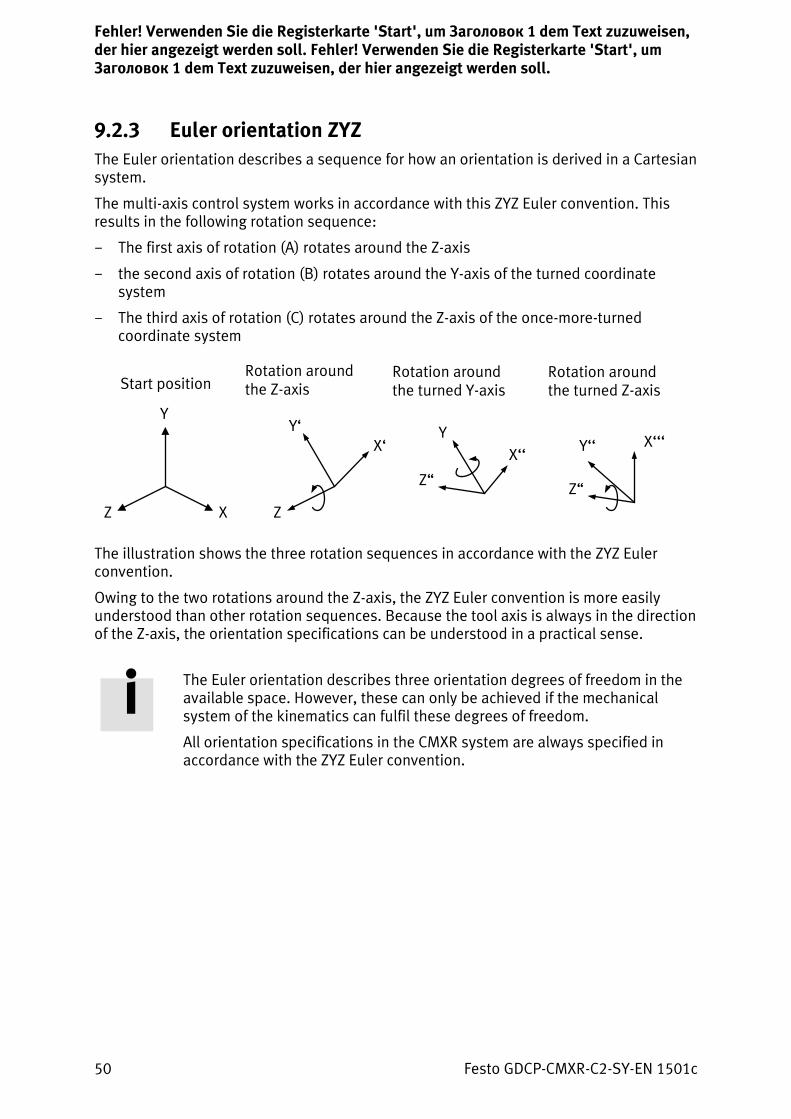
9.2.3 Euler orientation ZYZ The Euler orientation describes a sequence for how an orientation is derived in a Cartesian system.
The multi-axis control system works in accordance with this ZYZ Euler convention. This results in the following rotation sequence:
− The first axis of rotation (A) rotates around the Z-axis
− the second axis of rotation (B) rotates around the Y-axis of the turned coordinate system
− The third axis of rotation (C) rotates around the Z-axis of the once-more-turned coordinate system
The illustration shows the three rotation sequences in accordance with the ZYZ Euler convention.
Owing to the two rotations around the Z-axis, the ZYZ Euler convention is more easily understood than other rotation sequences. Because the tool axis is always in the direction of the Z-axis, the orientation specifications can be understood in a practical sense.
The Euler orientation describes three orientation degrees of freedom in the available space. However, these can only be achieved if the mechanical system of the kinematics can fulfil these degrees of freedom.
All orientation specifications in the CMXR system are always specified in accordance with the ZYZ Euler convention.
Z X
Y
Start position
X‘ Y‘
Rotation around the Z-axis
Z“
Rotation around the turned Y-axis
Rotation around the turned Z-axis
Z
X‘‘ Y
Z“
X‘‘‘ Y‘‘
50 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
9.3 Coordinate systems for the kinematics
9.3.1 Base coordinate system The so-called base coordinate system for the kinematics is defined by virtue of the arrangement of the axes in the available space and their parameterisation. It is a Cartesian coordinate system. This is defined, for example, through the direction of rotation of the drives and the axis zero point.
The required settings are made in the configuration of the multi-axis control system as well as in the configuration of the respective drive regulators.
The setting of the parameters for the axes and drives, which affect the coordinate directions, must comply with the right-hand rule, since the kinematics in the combination with the multi-axis control system is otherwise not able to run.
The position and orientation of the base coordinate system is determined by the kinematics used. Refer to the description of the corresponding kinematics for the definition.
The parameters of the axes and drives must be set so that the specifications are fulfilled for the respective kinematics.
The following graphic shows a Festo three-dimensional gantry with its base coordinate system, whose origin is formed from the zero points of the individual axes.
X+
Y+
Z+
Base coordinate system
Festo GDCP-CMXR-C2-SY-EN 1501c 51

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
9.3.2 World coordinate system The world coordinate system is defined with three degrees of freedom in the “World”. In general, the base and world coordinate system are congruent.
By shifting the base coordinate system, the world coordinate system could lie outside the working space of a kinematic system. It is therefore possible that several kinematic systems refer to the same zero point.
If a shift in the position or the orientation of the original base coordinate system of the kinematics is necessary, this can be defined by an offset via the Festo Configuration Tool (FCT).
Example:
Two three-dimensional gantries are mounted on a conveyor system. There is a common zero point on the conveyor system which applies to both kinematic systems. The kinematic systems have a distance from each other of 2000 mm or 3500 mm in the direction of the X-axis of the world coordinate system.
The offset of the base coordinate system for a kinematic system is defined from the viewpoint of the origin of the world coordinate system.
Simply put, you place the base coordinate system into the world coordinate system, and so the two coordinate systems are now congruent.
The base coordinate system is now moved and/or oriented accordingly away from the origin of the world coordinate system and into the required position.
World coordinate system
Conveyor system
X+
Y+
Z+
Y+
X+
Y+
X+
Z+ Z+
2000 mm 1500 mm
Two three-dimensional gantries with base coordinate system
52 Festo GDCP-CMXR-C2-SY-EN 1501c
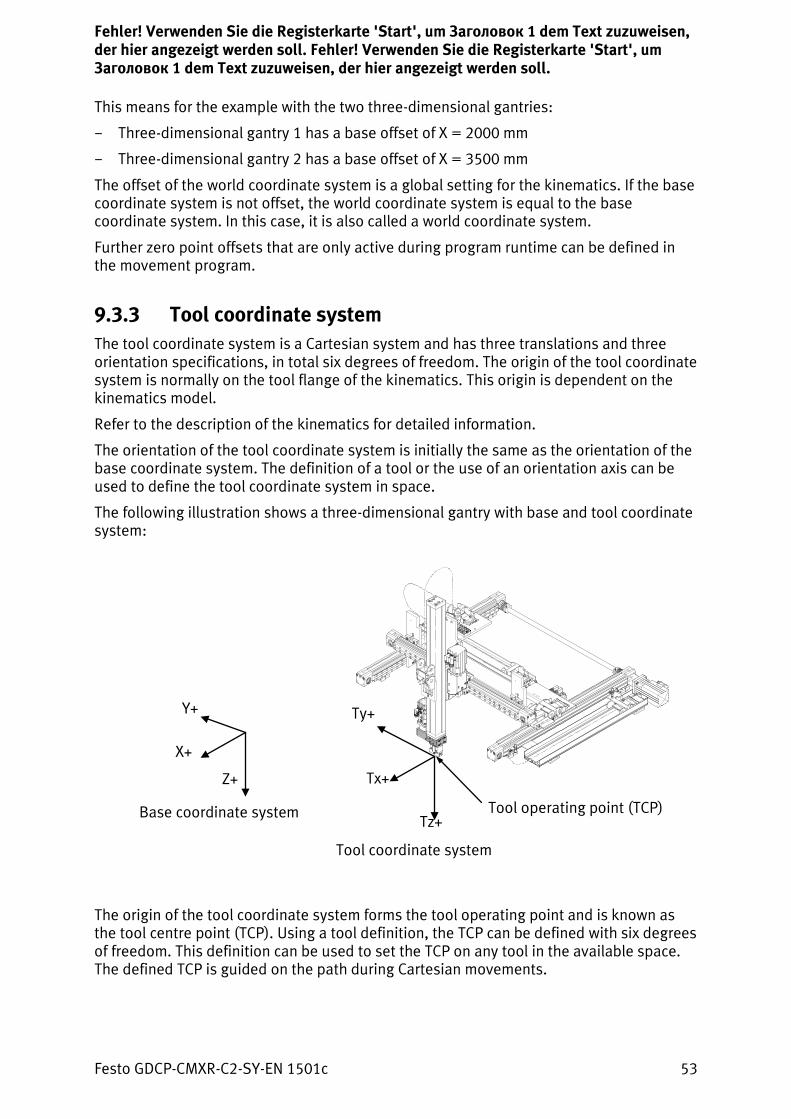
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
This means for the example with the two three-dimensional gantries:
− Three-dimensional gantry 1 has a base offset of X = 2000 mm
− Three-dimensional gantry 2 has a base offset of X = 3500 mm
The offset of the world coordinate system is a global setting for the kinematics. If the base coordinate system is not offset, the world coordinate system is equal to the base coordinate system. In this case, it is also called a world coordinate system.
Further zero point offsets that are only active during program runtime can be defined in the movement program.
9.3.3 Tool coordinate system The tool coordinate system is a Cartesian system and has three translations and three orientation specifications, in total six degrees of freedom. The origin of the tool coordinate system is normally on the tool flange of the kinematics. This origin is dependent on the kinematics model.
Refer to the description of the kinematics for detailed information.
The orientation of the tool coordinate system is initially the same as the orientation of the base coordinate system. The definition of a tool or the use of an orientation axis can be used to define the tool coordinate system in space.
The following illustration shows a three-dimensional gantry with base and tool coordinate system:
The origin of the tool coordinate system forms the tool operating point and is known as the tool centre point (TCP). Using a tool definition, the TCP can be defined with six degrees of freedom. This definition can be used to set the TCP on any tool in the available space. The defined TCP is guided on the path during Cartesian movements.
Ty+
Tx+
Tz+
X+
Y+
Z+
Base coordinate system Tool operating point (TCP)
Tool coordinate system
Festo GDCP-CMXR-C2-SY-EN 1501c 53

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
9.3.4 Working with the tool coordinate system The tool coordinate system can be used to work entirely in manual override. This operating mode can be selected, for example, via the operator unit.
The tool coordinate system is only significant for teaching positions and manual operation.
If positions are taught with a selected tool coordinate system, these positions are stored as Cartesian or axis positions, depending on the variables used.
If the tool coordinate system is selected, the kinematics can be moved with its TCP within the defined tool coordinate system. The designation of the Jog keys changes on the operator unit.
If a limited kinematic system is being used, i.e. not all six degrees of freedom are covered, the axis designation, e.g. A4, is displayed for orientation axes instead of the orientation designation A, B, and C.
The following illustration shows a key allocation on the operator unit after selection of the tool coordinate system with limited kinematics.
Axes X, Y and Z of the tool
Orientation axis
54 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10. Supported kinematic systems The multi-axis control system has internal kinematics models. These models describe the type of kinematic systems as well as their axes in arrangement, position and form.
All the kinematics models that are supported by the multi-axis control system are described in the following segments.
The maximum number of axes of a kinematic system is limited to six.
10.1 Configuration of kinematic systems kinematic systems essentially comprise base axes and orientation axes (wrist axes). Added to these axes are also auxiliary axes, which together interpolate to the kinematics’ target position.
The significance and function of these axes are described below.
10.1.1 Base axes The axes A1, A2 and A3 normally form three axes, which cover the up to three translation axes X, Y and Z in the Cartesian system. These axes can approach positions in a Cartesian space.
If a tool is attached to the base axes, its orientation is coupled to the position of the base axes and cannot be influenced.
The following illustrations show the kinematic system EXTP and a three-dimensional gantry from Festo. The axes A1, A2 and A3 form the base axes of the kinematic systems.
All base axes are electric axes that are controlled via the multi-axis control system. The use of pneumatic axes as base axes is not possible.
A2
A3 A1
A1
A3
A2
Festo GDCP-CMXR-C2-SY-EN 1501c 55

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.1.2 Orientation axes (wrist axes) The orientation axes, also called wrist axes, are attached to one end of the base axes. These axes are rotational axes.
A maximum of one orientation axis is possible, and this adds another degree of freedom to the base axes’ three degrees of freedom. Together, this results in a maximum of four degrees of freedom.
At the end of the orientation axes, there is a tool flange upon which the tool is mounted. Thus the tool can be oriented in space by using the orientation axes, in a manner similar to a human hand, from which the term “wrist axis” comes.
Example: electrical rotary module with one degree of freedom
Should an orientation change be required on the path, the orientation axis must be of electric design so it can interpolate on the path.
Pneumatic rotary and semi-rotational axes can also be used as orientation axes, but with static orientation that must be set via the tool data.
-
Z-axis
+
56 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.1.3 Adjustment of orientation axes When the orientation axis is rotated, the orientation of the tool follows with it. This means, the orientation of the tool coordinate system, whose origin is on the TCP, changes analogously with the orientation of the orientation axis.
The orientation axis is rotated by +45 degrees in the following example. The tool coordinate system (Tx and Ty) is carried along with it analogously. The world coordinate system is not affected by this.
If a reference system is activated by programming in FTL (Festo Teach Language), this has an additive impact on the world coordinate system. If a rotation that can be covered by the kinematics’ degree of freedom (e.g. rotation around the Z-axis) is generated in the reference system, the orientation axis is automatically adjusted.
In the following example, the right contour is offset and rotated using a reference system. Since the rotation can be executed with the orientation axis, the axis will be adjusted. Thus the tool is guided to the contour almost at once, as if there were no rotation.
If a contour is oriented in the available space by a reference system, the tool is automatically guided on the contour with the aid of an orientation axis. The prerequisite is that the required degrees of freedom are covered by the orientation axis.
Ty+
Tx+
Y+
X+
World coordinate system Orientation axis = 0 degrees
Ty+
Tx+
Orientation axis = 45 degrees
Ty+
Tx+
Y+
X+
Contour without offset Contour with offset and rotation by the reference system
Y+
X+
Y+
X+
Ty+
Tx+
Festo GDCP-CMXR-C2-SY-EN 1501c 57

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.1.4 Interpolation of orientation axes All base and wrist axes are axes of the kinematics. The movements of these axes are calculated by the internal kinematics model, the coordinate transformation. With Cartesian movements, the Cartesian position and the specified orientation are also taken into account. In the process, it is quite possible that several axes can move in just one position command. This is dependent on the position command as well as the type of kinematics used.
In the example below, an elbowed tool is attached to an orientation axis. This tool is guided on the path, whereby the orientation is turned by 180 degrees.
The illustration below shows the top view of the movement. This tool point is guided on the path, whereby the orientation (rotation by 180 degrees) follows along with it. The Cartesian axes X, Y and Z carry out a so-called compensating movement in overlapping fashion to the path movement. This is necessary so that position, orientation and tool adapt to the path.
Axes movements that follow the orientation change are also known as compensating movements
Note
Because the orientation axes, e.g. produced by reference systems, automatically rotate as a result of the adjustment, you have to check that all application lines (cables, hoses) are not damaged.
Path of the tool flange
Path of the tool X+
Y+
+ Orientation axis
+
X+
A+
Y+
Z+
58 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
During the interpolation of the orientation axis, you must make sure that it responds differently when a Cartesian or axis position is specified.
If using a Cartesian position, the target position is approached by the shortest path. If a position is specified in axis coordinates, the orientation axis will always cover the programmed route.
When integrating the orientation axes, it is recommended to teach and test the direction of rotation of this axis via the operator unit.
In the following example, the orientation axis is on the position 40 degrees. If a movement is now programmed with a Cartesian position (type CARTPOS), in which the orientation axis is to rotate 320 degrees, it carries it out on the shortest route. In this example, that means it effectively turns 80 degrees.
If now an axis position (type AXISPOS) is specified instead of a Cartesian position, the orientation axis rotates from the 40 degree position to the 320 degree position, taking the sign into account. That means, the orientation axis rotates effectively 280 degrees.
Path of the tool
X+
Y+
0°
90°
180°
270°
Path of the orientation axis when an axis position is specified
40° 320°
Path of the tool X+
Y+
0°
90°
180°
270°
Path of the orientation axis when a Cartesian position is specified
40° 320°
Festo GDCP-CMXR-C2-SY-EN 1501c 59

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.1.5 Electric and pneumatic manual axes A pneumatic semi-rotational axis is not regarded as a wrist axis, because it cannot be travelled in an interpolating fashion. It must therefore be taken into account within the tool definition.
Note
When using pneumatic axes, always take into consideration the correct tool definitions. Incorrect tool definitions, or tool definitions not taken into consideration, can cause collisions and material damage.
The figure below shows the use of a pneumatic semi-rotational axis behind an electric wrist axis. Shown here is an extract of the parallel kinematics EXPT with an electric orientation axis on which the pneumatic DRQD semi-rotational axis with vacuum gripper is mounted.
Electric orientation axis
Pneumatic semi-rotational axis DRQD
60 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.1.6 Auxiliary Axes In contrast to base and wrist axes, auxiliary axes do not belong to the kinematics model and are not taken into account by the kinematics model of the coordinate transformation. Auxiliary axes are interpolated by the multi-axis control system for the Cartesian movement of the base and manual axes in the form of a PTP movement.
Auxiliary axes are always interpolated together for the Cartesian movement. A separate, asynchronous movement of auxiliary axes for Cartesian movement of the kinematics is not possible.
The figure below shows the use of an electrical auxiliary axis on the parallel kinematics EXPT. The auxiliary axis is also used as a rotational axis on the tool flange, since this constellation is not included in the kinematics model of the parallel kinematic system.
The illustration shows a positional change of the rotational auxiliary axis. Because it is not a Cartesian movement, the other axes do not carry out a compensating movement.
Note
If auxiliary axes are used, there is a danger of collision during movements, because the tool (TCP) under certain circumstances is not guided on the path of the kinematics axes. It is absolutely essential that the movement is checked.
Workpiece
Festo GDCP-CMXR-C2-SY-EN 1501c 61

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.1.7 Programming the manual and auxiliary axes Wrist and auxiliary axes are moved via a PTP movement based on the internal interpolation. This interpolation type requires a dynamic specification. Accordingly, the path’s programmed Cartesian dynamics has no effect on the dynamics of the wrist and auxiliary axes.
To influence the dynamic response of manual and auxiliary axes, in addition to the Cartesian dynamic response, the corresponding dynamic response specifications are required for these axes as well. These are specified as percentages via FTL commands.
Detailed information should be taken from the programming instructions ( GDCP-CMXR-SW-…).
10.1.8 Designation of axis sequence for kinematics Base and wrist axes for kinematics describe a sequence of axes. To represent this sequence, letters are used to describe this axis chain.
Using this designation, the kind of axis, linear axis or rotational axis, is specified.
L means linear axis
R means rotational axis
The identifier is constructed as follows:
<String for basic axes> - <String for manual axes>
Examples:
LL–R Kinematics with two linear base axes and one rotational wrist axis
LLL–RR Kinematics with three linear base axes and two rotational wrist axes
62 Festo GDCP-CMXR-C2-SY-EN 1501c
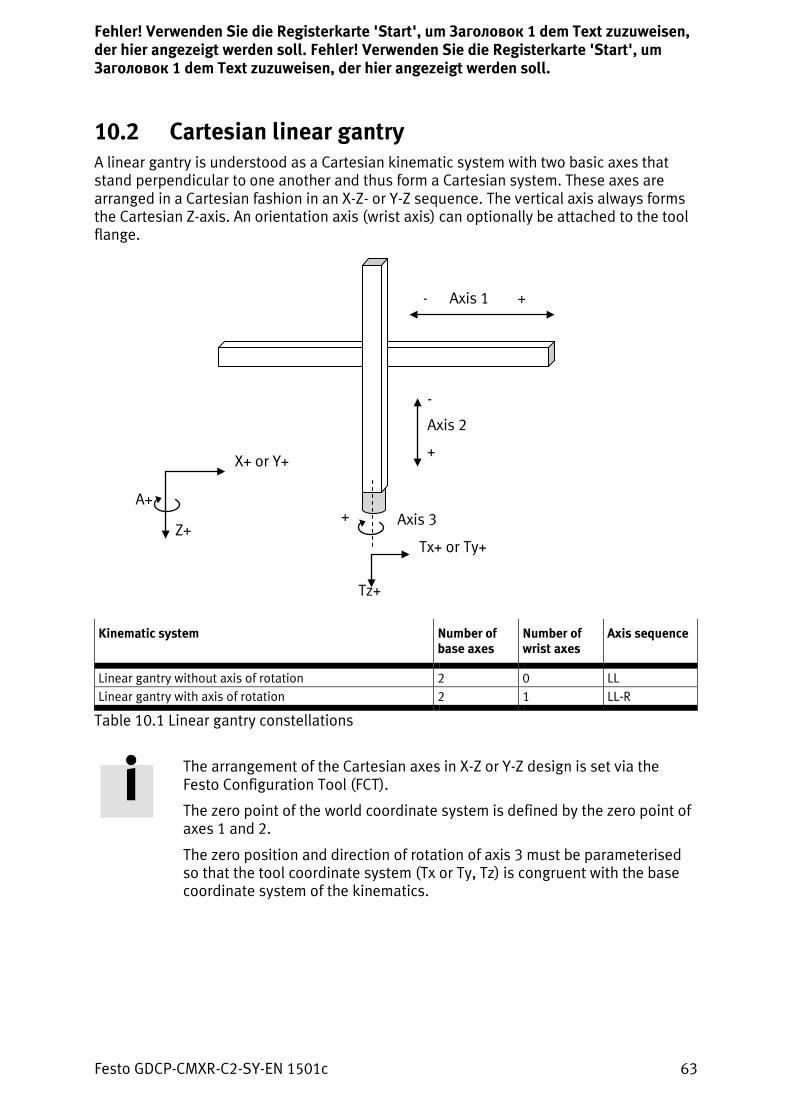
Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.2 Cartesian linear gantry A linear gantry is understood as a Cartesian kinematic system with two basic axes that stand perpendicular to one another and thus form a Cartesian system. These axes are arranged in a Cartesian fashion in an X-Z- or Y-Z sequence. The vertical axis always forms the Cartesian Z-axis. An orientation axis (wrist axis) can optionally be attached to the tool flange.
Kinematic system Number of
base axes Number of wrist axes
Axis sequence
Linear gantry without axis of rotation 2 0 LL Linear gantry with axis of rotation 2 1 LL-R
Table 10.1 Linear gantry constellations
The arrangement of the Cartesian axes in X-Z or Y-Z design is set via the Festo Configuration Tool (FCT).
The zero point of the world coordinate system is defined by the zero point of axes 1 and 2.
The zero position and direction of rotation of axis 3 must be parameterised so that the tool coordinate system (Tx or Ty, Tz) is congruent with the base coordinate system of the kinematics.
- Axis 1 +
-
Axis 2
+
Axis 3
X+ or Y+
Z+
A+ +
Tz+
Tx+ or Ty+
Festo GDCP-CMXR-C2-SY-EN 1501c 63

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
This reduced kinematics only allows limited interpolating orientation axes, because the third degree of freedom of the base axes is missing; this is to induce the tool to make compensating movements in space. Cartesian movements can thus only be carried out in the direction of the available base axes, axis 1 and axis 2.
Example:
The kinematic system has an orientation axis (axis 3) on which a tool is mounted, whose TCP is defined in space (not vertical). A Cartesian rotation of axis 3 around the TCP is not possible due to the missing degree of freedom of the base axes.
This type of rotation has to be moved with a PTP movement. The tool centre point (TCP) is meaningless here.
With a linear gantry, only limited interpolating orientation axes are possible due to a lack of degrees of freedom.
Positioning commands in a non-existing degree of freedom are not possible and will lead to an error.
Note
Repositioning is carried out via a PTP movement. Attention must be paid to possible obstacles.
The following illustration shows a Festo linear gantry:
64 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.3 Cartesian planar surface gantry A planar surface gantry is a Cartesian kinematic system with two base axes that are perpendicular to each other, and so has two translatory degrees of freedom. These two axes are laid out as X and Y and cover the X-Y level. An electric Z-axis that jointly interpolates is not present. The movements in the Z-direction can, for example, be implemented through a pneumatic drive. An orientation axis (wrist axis) can optionally be attached to the tool flange.
Kinematic system Number of base axes
Number of wrist axes Axis sequence
Planar surface gantry without axis of rotation 2 0 LL Planar surface gantry with axis of rotation 2 1 LL-R
Table 10.2 Planar surface gantry constellations
The zero point of the world coordinate system is defined by the zero point of axes 1 and 2.
The zero position and direction of rotation of axis 3 must be parameterised so that the tool coordinate system (Tx or Ty, Tz) is congruent with the base coordinate system of the kinematics.
With a planar surface gantry, only limited interpolating orientation axes are possible due to a lack of degrees of freedom.
Positioning commands in a non-existing degree of freedom are not possible and will lead to an error.
+ Axis 2 -
Axis 3 +
Tx+
Ty+
Axis 1
-
+
Y+
A+ X+
Festo GDCP-CMXR-C2-SY-EN 1501c 65

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
Note
Repositioning is carried out via a PTP movement. Attention must be paid to possible obstacles.
The following illustration shows a Festo planar surface gantry with a pneumatic Z-axis:
10.4 Cartesian three-dimensional gantry A three-dimensional gantry is a Cartesian kinematic system that can move in space with its three basic axes. These three base axes X, Y and Z stand perpendicular to one another. An orientation axis (wrist axis) can optionally be attached to the tool flange.
+ Axis 2 -
Axis 4 +
Tx+
Ty+
Axis 1
-
+
Tz+
Y+
A+ X+
Z+
Axis 3
+ -
-
66 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
Kinematic system Number of base axes
Number of wrist axes Axis sequence
Three-dimensional gantry without axis of rotation 3 0 LLL Three-dimensional gantry with axis of rotation 3 1 LLL-R
Table 10.3 Three-dimensional gantry constellations
The zero point of the world coordinate system is defined by the zero point of axes 1, 2 and 3.
The zero position and direction of rotation of axis 4 must be parameterised so that the tool coordinate system (Tx or Ty, Tz) is congruent with the base coordinate system of the kinematics.
Note
Repositioning is carried out via a PTP movement. Attention must be paid to possible obstacles.
The figure below shows a Festo three-dimensional gantry:
Festo GDCP-CMXR-C2-SY-EN 1501c 67

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.5 Parallel kinematic system EXPT With the parallel kinematic system EXPT, the axes are arranged perpendicular to each other and do not form a Cartesian space. This kinematic system has 3 degrees of freedom. An orientation axis (wrist axis) can optionally be mounted to the tool flange.
Kinematic system Number of base axes
Number of wrist axes Axis sequence
Parallel kinematics without axis of rotation 3 0 LLL Parallel kinematics with axis of rotation 3 1 LLL-R
Table 10.4 Parallel kinematics constellations EXPT
The zero point of the world coordinate system is defined by the zero point of axes 1, 2 and 3.
The zero position and direction of rotation of axis 4 must be parameterised so that the tool coordinate system (Tx or Ty, Tz) is congruent with the base coordinate system of the kinematics.
Axis 4 +
Ty+
Tx+
Tz+
Axis 1 -
+ + +
-
Axis 3 Axis 2
-
X+
A+
Y+
Z+
68 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
The position of the Cartesian coordinate system is determined by axis 1 of the kinematics. If axis 1 is projected onto the horizontal level, the axis vector describes the direction of the Cartesian X-axis. The positive direction of the Cartesian X-axis is determined by the negative direction of axis 1.
If an alignment of the Cartesian axes on another reference system, e.g. a conveyor unit, is desired when mounting the kinematics, this must be carried out by aligning the kinematics via axis 1. The precise alignment is carried out by offsetting the world coordinate system and defined via the Festo Configuration Tool (FCT).
Note
Repositioning is carried out via Cartesian linear interpolation. Attention must be paid to possible obstacles.
The following figure shows the parallel kinematics EXPT from Festo:
Axis 3
- +
+
+
-
-
Axis 1 Axis 2
X+
Y+
Festo GDCP-CMXR-C2-SY-EN 1501c 69

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.5.1 Origin of the tool coordinate system The tool coordinate system, with its axis directions for the zero position of the orientation axes, is congruent with the base coordinate system of the parallel kinematics. The zero point of the tool coordinate system is placed centrally at the level of the flange plate.
The origin of the TCP vector is in the original zero point for the tool coordinate system on the tool flange. The TCP vector shifts the tool coordinate system according to its definition. When defining a TCP vector for a tool mounted on the flange plate, you must make sure that the vector is specified from the origin of the tool coordinate system on the tool flange.
When defining the TCP vector, the offset dimension to the flange plate as well as any top elements must be taken into consideration.
Flange plate Offset in Z+ to the flange
Origin of the tool coordinate system
Ty+
Tx+ Tz+
TCP vector Z TCP vector
Rods
TCP vector X
70 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.6 Linear gantry EXCT The linear gantry EXCT is a kinematic system with a rotating toothed belt and stationary motors. This consists of 2 base axes, which are perpendicular to each other. Optionally, an orientation axis (wrist axis) can be attached to the tool flange in this kinematic system.
Kinematic system Number of base axes
Number of wrist axes Axis sequence
Linear gantry EXCT without axis of rotation 2 0 LL Linear gantry EXCT with axis of rotation 2 1 LL-R
Table 10.5 Linear gantry EXCT constellations
The zero point of the world coordinate system is defined by the zero point of axes 1 and 3.
The zero position and the direction of rotation of axis 3 must be parameterised in such a way that the tool coordinate system (Ty, Tz) is the same as the base coordinate system of the kinematic system.
- Axis 1 +
Axis 3 +
Ty+
Axis 2
Tz+
Y+
A+
Z+
+
- Front view
Festo GDCP-CMXR-C2-SY-EN 1501c 71

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
The following illustration shows a linear gantry EXCT from Festo:
10.7 Planar surface gantry EXCH The planar surface gantry EXCH is a kinematic system with a rotating toothed belt and stationary motors. This has optionally 2 or 3 base axes, which are perpendicular to each other. Optionally, an orientation axis (wrist axis) can be attached to the tool flange in this kinematic system.
Illustration of planar surface gantry with 3 base axes:
Ty+
Tz+
Tx+
M–
Motor 1
Axis 1
+
–
Axis 2 –
+
Motor 2
Axis 3
–
+
M– Axis 4
+
Y+ A+
Z+
X+
72 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
Kinematic system Number of base axes
Number of wrist axes
Axis sequence
Planar surface gantry EXCH (without Z-axis) without axis of rotation 2 0 LL Planar surface gantry EXCH (without Z-axis) with axis of rotation 2 1 LL-R Planar surface gantry EXCH (with Z-axis) without axis of rotation 3 0 LLL Planar surface gantry EXCH (with Z-axis) with axis of rotation 3 1 LLL-R
Table 10.6 Planar surface gantry EXCH constellations
The zero point of the world coordinate system is defined by the zero point of axes 1, 2 and 3.
The zero position and direction of rotation of axis 4 must be parameterised so that the tool coordinate system (Tx or Ty, Tz) is congruent with the base coordinate system of the kinematics.
The following illustration shows a planar surface gantry EXCH from Festo:
Festo GDCP-CMXR-C2-SY-EN 1501c 73

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.8 Axis interpolation Kinematic systems for which no internal kinematics model exists can be controlled using pure axis interpolation. That means that all movements can only be carried out as PTP movements. Cartesian paths, such as linear and circular interpolation, are not possible. Furthermore, there are no manual and auxiliary axes as well as no definable tools (TCP).
The graphic shows an example of a free kinematic system with two linear axes and two rotating axes. For this kinematic system, there is no internal model, since the arrangement of the axes is free and so the axis sequence is undefined. For this reason, there are no world and tool coordinate systems, just an axis coordinate system.
The sequence of the possible linear and rotating axes is random and determined by configuration in the Festo Configuration Tool (FCT).
The zero point of the axis coordinate system is defined by the zero point of all axes.
With an axis interpolation, the mechanical constellation of the axes is unknown. The movements can only be carried out in a PTP interpolation. All functions that operate in the Cartesian way are not allowed and result in an error.
The following illustrations show examples of Festo linear and rotating axes:
Linear axes: Rotating axes:
Axis 2
+ Axis 3
Axis 1
+
-
-
+
+
Axis 4
74 Festo GDCP-CMXR-C2-SY-EN 1501c

Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll. Fehler! Verwenden Sie die Registerkarte 'Start', um Заголовок 1 dem Text zuzuweisen, der hier angezeigt werden soll.
10.9 Overview of all supported kinematics The following table provides an overview of all kinematics models supported by the multi-axis control system CMXR-C2.
Kinematic system Number of base axes
Number of wrist axes
Number of auxiliary axes
Cartesian linear gantry 2 Max. 1 Max. 3 Cartesian planar surface gantry 2 Max. 1 Max. 3 Cartesian three-dimensional gantry 3 Max. 1 Max. 3 Parallel kinematic system EXPT 3 Max. 1 Max. 3 Linear gantry EXCT 2 Max. 1 Max. 3 Planar surface gantry EXCH 2 or 3 Max. 1 Max. 3 Free kinematics 6 None None
Table 10.7 Overview of supported kinematics
The required kinematics model is selected during configuration via the Festo Configuration Tool (FCT).
The manual axes in the table are electric axes that interpolate with the kinematics. Pneumatic rotary and semi-rotary drives cannot be used here. These have to be integrated separately via the definition of tool data.
The maximum number of axes = base axes + manual axes + auxiliary axes = 6.
Festo GDCP-CMXR-C2-SY-EN 1501c 75

A Index
A. Index
A
Administrator ...................................... 32 Application directory ........................... 17 automatic mode .................................. 39 Auxiliary axes ...................................... 61 Axis coordinate system ........................ 48 Axis interpolation ................................ 74
B
Base axes ............................................ 55
C
CDSA-D1-VX ........................................ 25 Central control unit .............................. 13
D
Data memory ....................................... 15 Directory structure ............................... 16
E
Emergency stop ................................... 40
F
File system .......................................... 16 Front panel plug .................................. 21
I
Interface housing ................................. 28
J
Jumper plug ......................................... 29
L
Linear gantry ....................................... 63 Linear gantry EXCT ............................... 71
M
Manual override .................................. 39 Master control..................................... 45 Memory card ....................................... 15
O
Operating modes ................................ 39 Operator unit ...................................... 25
P
Parallel kinematic system EXPT ........... 68 Password ............................................ 32 Planar surface gantry .......................... 65 Planar surface gantry EXCH ................. 72 Plug connector .................................... 21
R
Reduced speed ................................... 39 repositioning....................................... 41
T
Three-dimensional gantry ................... 66 Tool coordinate system ....................... 70
U
User name........................................... 32 User rights .......................................... 32
W
Wrist axes ........................................... 56 Write permission ................................. 45
76 Festo GDCP-CMXR-C2-SY-EN 1501c




Copyright:
Festo AG & Co. KG Postfach D-73726 Esslingen, Germany Phone: +49 711 347 0 Fax: +49 711 347 2144 E-mail: [email protected]
The reproduction, distribution or sale of this document or communication of its contents to others without express authorisation is prohibited. Offenders will be held liable for damages. All rights reserved in the event that a patent, utility model or design patent is registered.
Internet: www.festo.com Original: de Version: 1501b




























