Embed Size (px)
Citation preview

PART 111. TECHNOLOGY
INTRODUCTORY REMARKS TO SESSION I11
Charles Stark Draper
Charles Stark Draper Laboratory Division Massachusetts Institute of Technology
68 Albany St., Cambridge, Mass. 02139
I should like to say a few words about a subject not specifically recognized in the program. This matter is the technology of control, guidance, and navigation for space vehicles, including missiles, orbiting vehicles, craft for trips within the solar system, particularly to the moon, and vehicles to range throughout all of space.
I recently had the pleasure of being invited to England to make a speech before the British Interplanetary Society. This group is one of the oldest organizations associated with plans to move out beyond the gravitational field and the atmosphere of our earth. The BIS, in its wisdom, saw fit to make me an honorary fellow of the society. My acceptance speech was, of course, on the assigned topic of guidance for space vehicles. I had just come from the IAF Congress in Konstanz on the Bodensee in Germany where a great deal of attention was given-I think they had two or three half-day meetings-to the history of rocketry.
Many people throughout thousands of years have indeed put some sort of a rapidly burning chemical in a closed chamber and used it to generate a rocket action by flow through a shaped hole (FIGURE 1). The Chinese records of such experiments go back to something approximating three millenia. We are all familiar with the jet propulsion achievements of our modern times.
The story of rocket propulsion is clearly a part of recorded history during some 3,000 years. On the other hand, in very striking contrast, it is only within the last 30 years, roughly since 1940, when the Germans at Peenemiinde began a new technology of guidance, that the spectacular but generally useless displays of fire and smoke associated with rockets began to show signs of becoming capable of high effectiveness in carrying out missions based on delivery of payloads close to preselected targets.
Before 1940 little attention had been given to accuracy and reliability in guidance, and overall results from rocket-propelled vehicles were very poor. The great imagination and creativity of Dr. Wernher von Braun's staff, including Dr. E. H. Steinhoff, whom I began to know well during the years at the end of the '40s and beginning of the ' ~ O S , resulted in a tremendous job of pioneering radio-inertial guidance for ballistic missiles. Many of von Braun's able associates are still working in Germany and the United States. Peene- miinde was the start. In three decades, not 3,000 years, the progress of guidance technology has been spectacular, particularly in the United States and the Soviet Union. Today's performance, in terms of its ability to cause vehicles propelled by rockets, although there's nothing sacred about the type of driving force that might be used (it can be any sort of effective system), is truly a very great achievement of modem technology (FIGURE 2). Craft moving in six degrees of freedom, three in rotation and three in translation away from the surface of the earth, can indeed be reliably expected to carry
25 1

252 Annals New York Academy of Sciences
FIGURE 1. Lunar Orbiter Mission, Apollo 8 space vehicle, being launched from launch Complex 39, Kennedy Space Center, Dec. 21, 1968. This is the manned space- ship that flew around the moon on Christmas of 1968, the first manned Saturn V launch.

Draper: Introductory Remarks to Section I11 253
out missions successfully ending with impacts very close to designated targets. The possibilities of effective guidance was a subject for discussion and very great skepticism among many people well into the 1950s and the first years of the 1960 decade. Now everybody knows, from having seen television screens and read the newspaper reports, that guidance was not the limitation on any of the Apollo missions to the moon, and that it also has proved to work satisfactorily in submarines, aircraft, orbiting vehicles, missiles, and spacecraft moving over great reaches of the solar system.
FIGURE 2. Apollo guidance and navigation system on test stand at the Draper Laboratory, Massachusetts Institute of Technology.

254 Annals New York Academy of Sciences
I am certain you know, from reading the papers, that, contrary to the opinions expressed by many authorities after World War 11, guidance tech- nology does make the rocket most effective as a device of military power. It is public knowledge that guidance systems have demonstrated capabilities of doing the required jobs very well, and in addition have surely given substantially perfect results on the early Apollo flights. On Apollo 13, the control, navigation, and guidance system was for a long time shut down in the command module with the equipment, of necessity, used in a makeshift mode for lunar module operation during most of the trip. These extraordinary circumstances did not prevent a substantially perfect hit from being achieved for the record at the time of return to earth.
I happened to be in Paris on the day of the landing and was invited by the French television people to appear on a national hookup and be present when the splashdown occurred. The French commentator had been working to hold the attention of his audience by explaining for a long time how the spacecraft operated, and all the other things he could demonstrate from models and pictures suplied by NASA, and he was out of something to say. Dr. Frank Malina and I were invited, just the two of us with the commentator, to make up a television show. I understand that there were actually 21 million viewers at the time of our appearance, since everybody was watching for the unique event of a landing recorded in real time. There was a great deal of emotional steam generated by the fact that a whole world of viewers could see the course of events as three good people could come to very possible disaster at the end of a long and trying mission that had gone awry. I had just talked by telephone with my laboratory in Cambridge, so I knew that in the Apollo Command module the power had been returned to the guidance system and that everything was working correctly. When the French commentator wanted to know if I was worried about the landing, I had a firm basis for saying, “NO, I am not worried about the landing.” (FIGURE 3.)
I was asked, “Why not?’ I answered: “I have confidence that the equipment design and construction will take care of any situation that may occur and that its reliability is such that it will surely work without trouble.” The com- mentator, having nothing much else to do just then, kept pressing me on this point, and finally he asked, “How close will the craft come to the target point?” I replied, “Within an error of not more than 200 or 300 meters.” He wanted to know how I could make such a wild statement as that., I said, “Well, we’ve done something like that several times before.” We were continuing this discussion in a bickering sort of a way when the parachutes appeared exactly in the center of the television screen and the argument was settled conclusively for all to see by events in the real world.
I suppose that this occurrence was about as big a piece of luck as ever happened to a member of the human race. My point is this, that I had real justification for the statement made in my speech to the British Interplanetary Society, in which I said that in my opinion the technology of guidance today is already in a state where it is capable of handling problems for vehicles of all kinds moving in six degrees of freedom with respect to the Earth. It is capable of handling the motion in the depths of the ocean, throughout the atmosphere, in orbit of all kinds, in the solar system, and out beyond the limits of influence from our sun. The existing technology of guidance is capable of dealing satisfactorily with problems of missions throughout all of space in which the laws of Newtonian mechanics and Euclidean geometry are valid.

Draper: Introductory Remarks to Section I11 255
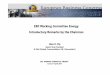
FIGURE 3. Apollo IX Command Service module photographed from the Lunar Excursion module Spider during Apollo IX Earth rendezvous mission in preparation for a manned landing on the moon.
The guidance equipments that have been designed and manufactured up to the present time can certainly be made smaller, lighter, and perhaps cheaper, and can have their life expectancy increased to periods of 10, 20, or more years, as needed. This technology is within our hands today, not only to implement space travel, but also for missions not yet defined in detail such as those of the space shuttle. Actually, the identical equipment that was used on Apollo will work well on hybrid aircraft if proper modifications are

256 Annals New York Academy of Sciences
made to the computer and its memory system. The technology of the Apollo system is basically the same as that of the Polaris guidance system, which is now some 15 years old. Principles are surely unchanged, but much-improved details are available in all of the subsystems involved. This fact makes it certain that the control, navigation, and guidance will not be the limiting factor for any endeavor in the exploration of space, either manned or unmanned, that we may care to undertake in the future.
Let me explain briefly why I believe this. Science, mathematics, and geometry take generally two somewhat separate approaches. One approach is that of differential geometry, where you start with derivatives of motion at some point on board a moving entity and derive motion of the entity with reference to an arbitrarily selected external space. This external space serves the function of providing a set of reference coordinates with respect to which acceleration may be specified in terms of velocity vector changes from which integration may be used to determine location deviations as they build up from selected reference points.
This procedure for dealing with problems of motion and displacement is fundamental in differential geometry. The allowable distance of travel from an initial point depends on the quality of geometrical knowledge about acceleration with respect to known reference coordinates. The accuracy of quantities of velocity changes and position shifts depends upon the excellence of single- and double-integration operations available for navigation and guidance in the computing system. A second approach to navigation and guidance starts with the basic ideas of projective geometry, a field of mathe- matics that deals with the vector from the origin of the external reference coordinates to the origin of coordinates in the vehicle. The length of this location vector and its directions with respect to the external reference coordinates, together with the derivations of these quantities, determine the motion of the vehicle. You deal in terms of the located entity with respect to the reference space by following the length of the vector and angles of this vector. You can measure these quantities with respect to the external reference coordinates you have chosen by optical light, radar, laser light, radio, x rays and other available radiation. When guidance applies to either of these attitudes, the only possible attacks, the differential geometry approach or the projective geometry plan of attack, you must concern yourself with six degrees of geometrical freedom, three degrees of freedom in rotation, three degrees of freedom in translation, and also with two derivatives for each of these six degrees of freedom. In both cases you have to deal with 18 mathematical quantities related by the laws of dynamics, the laws of geometry, and provisions made for introducing corrections based on knowledge of local gravitational fields. Guidance system computers must be designed to deal with all the problems involved, rapidly, completely, and reliably, and with tolerable “round- off’ errors. Projective geometry lines of sight must be determined by radia- tion contact devices and angle tracking equipment. On the other hand, differ- ential geometry quantities are measured by instruments self-contained on board vehicles in terms of linear accelerations along coordinate directions maintained by gyroscopic actions. Mechanization of the two approaches is certainly different, but results may be essentially the same under circumstances when effective radiation contacts with external reference space are available.
Fortunately, the laws of Newton are true with regard to a space that we define as inertial space. This happens to be the same space in which celestial

Draper: Introductory Remarks to Section I11 257
bodies move, and it is a complex of spaces that is recognized everywhere by matter, in particular the little particles of matter that may be formed into a symmetrically designed spinning rotor to move according to laws in inertial space that are the same as those followed by the gases of the farthest stars. This means that, on board a moving vehicle, it is possible to establish gyroscopic effects in which symmetrical wheels make it possible to detect angular devia- tions from initially set reference directions of the spin axis. It is also possible to measure this by determining resultant overall force on a restrained proof mass, a rigid body collection of particles of matter. Remembering that the force is associated with the resultant of the gravitational field and the vector acceleration that may be present with respect to inertial space, it is possible to correct out effects due to gravity, and from which indications of velocity changes may be derived.
You get your second derivative in geometry directly related to force measurements after correcting for gravity. Fortunately, in these latter days we have developed instruments that produce digital signals, signals that can indeed be very nicely used by computers with the pertinent theoretical laws built in along with data on the gravitational fields involved. At times some other special theory and also measurements of directions and distances to known bodies by optical, laser, radar, and radio systems are the pieces of information that are essential as inputs to computers that must produce control, navigation, and guidance command signals as its outputs. It is surely worthwhile to note that computer technology is so highly developed today that whatever calcula- tions are required can be performed reliably, accurately, and flexibly by equip- ment of reasonable size and weight.
Outputs from guidance systems may appear as indications for the use of human operators, they may be recorded, they may be transmitted to monitoring stations, or they may be transformed into command signals adapted for use by control systems of vehicles carrying out missions as preset programs are followed automatically. As yet, computing subsystems are expensive, but even this situation will improve in time. This whole technology of information- handling has developed from low levels 30 years ago. This rapid progress has been a strong factor for the realization of guidance, control, and navigation equipment for space vehicles. The work will require the cooperation of people in various disciplines because the theoretical problems involved are those of basic geometry, fundamental dynamics, mathematics, and astronomy, with observations of stars, planets, satellites, and landmarks to provide data for working out results required for control, navigation, and guidance of vehicles to carry out missions of all kinds that will appear or that will need to be solved for manned and unmanned exploration of as far out in the solar system or beyond as we wish to go.
The accuracies even now are at a point where 100 feet or so is meaningful, and if it is necessary, you can go finer than that. A second of arc corresponds to the angular difference between two gravitational vectors at points on the Earth’s surface, 100 feet apart. This means that equipment capable of dealing with fractional arc seconds can provide locations on the Earth’s surface valid within tens of feet. This kind of performance is now available from second- generation hardware that has appeared only 30 years after working systems were first demonstrated. Improvements in quality are still possible, but it is in reliability that the greatest advances are to be expected. Present-day technology can provide mean times to failure of a year or so, with five or ten years well in

258 Annals New York Academy of Sciences
sight. Longer times are certainly possible that will not limit space exploration in the future.
The so-called “Space Shuttle,” a hybrid aircraft and spacecraft vehicle, is now a common topic of conversation. The control, navigation, and guidance systems that now exist and work for submarines, ships, aircraft, missiles, orbiting vehicles, and spacecraft are capable of being adapted to the needs of the shuttle. This statement is made with complete assurance because the present systems take into account six degrees of freedom, three rotational components, and three translational components, and use first and second derivations of each degree of freedom in computations. Provisions are made for line-of-sight observations from any available celestial bodies and other reference points that may very well be Earth landmarks, so that all essential information is collected and applied in finding results. This means that control, navigation, and guidance problems for vehicles of all kinds can be solved by modifications of the same hardware for a shuttle or a space ship. Because this is so, great economies are possible by applying parts of existing equipment to new designs as they are developed.
I have made some statements that I am sure many people will wish to discuss. People have been arguing with me on this subject for some 30 years.
DISCUSSION OF THE PAPER
UNIDENTIFIED SPEAKER: I may be asking you to repeat what you have already said, but I’d like to hear you say it again. It’s music to my ears, for I’m interested in guidance on the Grand Tour Missions, and there I think we have some problems that may be different from those we encountered on the moon and Mars missions. First, what if you don’t know exactly where the outer planets-Jupiter, Saturn, Uranus, Neptune and Pluto-are located? Couldn’t this make guidance impossible? Second, suppose you don’t have any reliable landmarks on the surfaces of these planets, as is the case on the moon and Mars, what would happen during a swing-by or orbit? Additionally, you may not know just how far you are from the planet, and besides all these things, I assume you are well informed that a signal from Jupiter to Earth and back again takes something like 80 minutes or more-80 or 90 minutes. Obviously, the spacecraft has to make its own decisions, it has to show initiative. Consider also the matter of overwhelming demands on the reliability of the guidance system, which will have to operate for better than a decade if you are to have a successful mission; consider also the reliability demands on other systems that will be off for almost a decade before being turned on.
DR. DRAPER: That is quite a complicated question, but in the first place, let me repeat again that this is not a mechanization of approximated equations. The situation is one in which this is a completely self-contained on-board system and involves geometry, angles, coordinate angles maintained within a fraction of a second of arc for very long periods of time.
On the Earth we can perhaps maintain pretty good accuracy for a couple of months. Out there in space, you should do this for a much longer time because the buildup of error generally is associated with the action of gravity, and when you are in what is essentially a free-fall condition, the length of time is greatly expanded. But the point is that you have a false impression if you think this