Embed Size (px)
Citation preview

ION GNSS 2012ION GNSS 2012Nashville, TNNashville, TN
Sept. 17-21, 2012Sept. 17-21, 2012
GPS/GLONASS Multi-ConstellationSBAS Trial and Preliminary Results
for East-Asia Region
GPS/GLONASS Multi-ConstellationSBAS Trial and Preliminary Results
for East-Asia Region
Takeyasu Sakai, H. Yamada, and K. Hoshinoo,Electronic Navigation Research Institute
Takeyasu Sakai, H. Yamada, and K. Hoshinoo,Electronic Navigation Research Institute

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 22
IntroductionIntroduction• Combined use of GPS and GLONASS with SBAS augmentation:Combined use of GPS and GLONASS with SBAS augmentation:
– GPS/GLONASS-capable receivers are now widely available;GPS/GLONASS-capable receivers are now widely available;
– SBAS (satellite-based augmentation system) is an international standard of SBAS (satellite-based augmentation system) is an international standard of the augmentation system; US WAAS, Japanese MSAS, and European the augmentation system; US WAAS, Japanese MSAS, and European EGNOS are already operational;EGNOS are already operational;
– All operational SBAS are augmenting only GPS;All operational SBAS are augmenting only GPS;
– To improve availability of SBAS-augmented position information, a possible To improve availability of SBAS-augmented position information, a possible way is extending SBAS to support other constellation, e.g., GLONASS.way is extending SBAS to support other constellation, e.g., GLONASS.
• Possibility of Multi-Constellation SBAS (MC SBAS):Possibility of Multi-Constellation SBAS (MC SBAS):– SBAS specification already has definitions necessary to augment GLONASS;SBAS specification already has definitions necessary to augment GLONASS;
– Investigating advantages of using GLONASS, we have implemented SBAS Investigating advantages of using GLONASS, we have implemented SBAS simulator capable of augmenting both GPS and GLONASS simultaneously;simulator capable of augmenting both GPS and GLONASS simultaneously;
– It is confirmed that introducing GLONASS improves availability and It is confirmed that introducing GLONASS improves availability and robustness of position information especially where visibility is limited.robustness of position information especially where visibility is limited.

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 33
Concept of SBASConcept of SBAS
GeostationaryGeostationarySatellitesSatellites GPSGPS
SatellitesSatellites
Ground MonitorGround MonitorStationsStations
UsersUsers
UplinkUplinkStationsStations
AugmentationAugmentationSignalSignal
RangingRangingSignalSignal
AccuracyAccuracyIntegrityIntegrityRangingRanging

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 44
MotivationMotivationSBASSBASGEOGEO
• Increase of augmented satellites improves availability of position solution;Increase of augmented satellites improves availability of position solution;• Also possibly reduce protection levels; Improve availability of navigation;Also possibly reduce protection levels; Improve availability of navigation;• Chance of robust position information at mountainous areas and urban Chance of robust position information at mountainous areas and urban
canyons.canyons.
GPS constellationGPS constellation Additional ConstellationAdditional Constellation= GLONASS= GLONASS
AugmentationAugmentation

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 55
Part 1Part 1
GLONASSGLONASSin the Current SBAS Standardin the Current SBAS Standard

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 66
Current SBAS StandardCurrent SBAS Standard• Already have definition of GLONASS:Already have definition of GLONASS:
– The SBAS standard is documented by ICAO The SBAS standard is documented by ICAO (International Civil Aviation Organization);(International Civil Aviation Organization);
– GLONASS L1 CSA (channel of standard GLONASS L1 CSA (channel of standard accuracy) signal has already been described in accuracy) signal has already been described in the SBAS standard based on GLONASS ICD;the SBAS standard based on GLONASS ICD;
– SBAS signal is also able to contain information SBAS signal is also able to contain information on GLONASS satellites.on GLONASS satellites.
• Differences from GPS in terms of SBAS Differences from GPS in terms of SBAS augmentation:augmentation:
– FDMA signals;FDMA signals;
– Reference time and coordination system;Reference time and coordination system;
– PRN mask numbers;PRN mask numbers;
– IOD along with corrections; andIOD along with corrections; and
– Satellite position computation.Satellite position computation.
The SBAS standard in the Annex The SBAS standard in the Annex to the Civil Aviation Conventionto the Civil Aviation Convention

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 77
FDMA SignalsFDMA Signals• FCN (Frequency Channel Number):FCN (Frequency Channel Number):
– GLONASS ICD defines FCN of GLONASS ICD defines FCN of ––7 to +13;7 to +13;
– Historically 0 to +13 were used; After 200Historically 0 to +13 were used; After 2005 the range of FCN shifts to –7 to +6;5 the range of FCN shifts to –7 to +6;
– FCN cannot be used for identification of sFCN cannot be used for identification of satellites; two satellites share the same FCatellites; two satellites share the same FCN.N.
• Difference of carrier frequency affects:Difference of carrier frequency affects:– Carrier smoothing: Carrier smoothing:
Wave length per phase cycle is depenWave length per phase cycle is dependent upon carrier frequency.dent upon carrier frequency.
– Ionospheric corrections:Ionospheric corrections: Ionospheric propagation delay is inverIonospheric propagation delay is inver
sely proportional to square of carrier frsely proportional to square of carrier frequencyequency..
(GLONASS ICD v5.0)(GLONASS ICD v5.0)

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 88
Time and Coordinate SystemsTime and Coordinate Systems• GLONASS Time:GLONASS Time:
– GLONASS is operating based on its own time system: GLONASS Time;GLONASS is operating based on its own time system: GLONASS Time;
– The difference between GPS Time and GLONASS Time must be taken into accoThe difference between GPS Time and GLONASS Time must be taken into account for combined use of GPS and GLONASS;unt for combined use of GPS and GLONASS;
– The difference is not fixed and slowly changing: about 400ns in July 2012;The difference is not fixed and slowly changing: about 400ns in July 2012;
– SBAS broadcasts the difference by Message Type 12SBAS broadcasts the difference by Message Type 12;;
GLONASS-M satellites are transmitting the difference as parameter GLONASS-M satellites are transmitting the difference as parameter GPSGPS in al in al
manac (non-immediate) data: manac (non-immediate) data: GPSGPS = = ttGPSGPS − − ttGLONASSGLONASS..
• PZ-90 Coordinate System:PZ-90 Coordinate System:– GLONASS ephemeris is derived based on Russian coordinate system PZ-90;GLONASS ephemeris is derived based on Russian coordinate system PZ-90;
– The relationship between WGS-84The relationship between WGS-84
and the current version of PZ-90and the current version of PZ-90
(PZ-90.02) is defined in the SBAS(PZ-90.02) is defined in the SBAS
standard as: standard as:

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 99
PRN MasksPRN Masks
PRN Contents
1 to 37 GPS
38 to 61GLONASS slot number plus 37
62 to 119 Spare
120 to 138 SBAS
139 to 210 Spare
• PRN Mask:PRN Mask:– SBAS transmits PRN mask informationSBAS transmits PRN mask information
indicating satellites which are augmentedindicating satellites which are augmented
by the SBAS;by the SBAS;
– PRN number has range of 1 to 210;PRN number has range of 1 to 210;
– Up to 51 satellites out of 210 can beUp to 51 satellites out of 210 can be
augmented simultaneously by the singleaugmented simultaneously by the single
SBAS signal;SBAS signal;
But, 32 GPS + 24 GLONASS = 56 !!!But, 32 GPS + 24 GLONASS = 56 !!!
• Solution: Dynamic PRN MaskSolution: Dynamic PRN Mask– Actually, PRN mask can change; Controlled by IODP (Issue of Data, PRN Mask);Actually, PRN mask can change; Controlled by IODP (Issue of Data, PRN Mask);
RTCA MOPS states this occurs “infrequently” while SBAS SARPS does not.RTCA MOPS states this occurs “infrequently” while SBAS SARPS does not.
– Change PRN mask dynamically to reflect the actual visibility of satellites from the Change PRN mask dynamically to reflect the actual visibility of satellites from the intended service area.intended service area.
PRN definition for SBASPRN definition for SBAS

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 1010
IOD (Issue of Data)IOD (Issue of Data)• IOD indicator along with corrections:IOD indicator along with corrections:
– LTC (Long-Term Correction) in SBAS Message Type 24/25 contains orbit and LTC (Long-Term Correction) in SBAS Message Type 24/25 contains orbit and clock corrections;clock corrections;
– Such corrections depend upon ephemeris data used for position computation;Such corrections depend upon ephemeris data used for position computation;– IOD indicates which ephemeris data should be used in receivers.IOD indicates which ephemeris data should be used in receivers.
• IOD for GPS satellites:IOD for GPS satellites:– For GPS, IOD is just identical with IODE of ephemeris data.For GPS, IOD is just identical with IODE of ephemeris data.
Previous EphemerisPrevious EphemerisIODE=aIODE=a
Next EphemerisNext EphemerisIODE=bIODE=b
LTCLTCIOD=aIOD=a
LTCLTCIOD=bIOD=b
TimeTime
LTCLTCIOD=aIOD=a
LTCLTCIOD=bIOD=b
LTCLTCIOD=aIOD=a

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 1111
IOD for GLONASSIOD for GLONASS• IOD for GLONASS satellites:IOD for GLONASS satellites:
– GLONASS ephemeris has no indicator like IODE of GPS ephemeris;GLONASS ephemeris has no indicator like IODE of GPS ephemeris;– IOD for GLONASS satellites consists of Validity interval (IOD for GLONASS satellites consists of Validity interval (VV) and Latency time () and Latency time (LL) )
to identify ephemeris data to be used:to identify ephemeris data to be used: 5 MSB of IOD is validity interval, 5 MSB of IOD is validity interval, VV;; 3 LSB of IOD is latency time, 3 LSB of IOD is latency time, LL..
– User receivers use ephemeris data transmitted at a time within the validity interval User receivers use ephemeris data transmitted at a time within the validity interval specified by specified by LL and and VV..
Ephemeris ValidityEphemeris ValidityIntervalInterval
LL11VV11
Previous EphemerisPrevious Ephemeris Next EphemerisNext Ephemeris
LTCLTCIOD=VIOD=V11|L|L11
Ephemeris ValidityEphemeris ValidityIntervalInterval
VV22
LTCLTCIOD=VIOD=V22|L|L22
LL22
TimeTime

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 1212
Satellite PositionSatellite Position• GLONASS ephemeris data:GLONASS ephemeris data:
– GLONASS transmits ephemeris information as position, velocity, and acceleratiGLONASS transmits ephemeris information as position, velocity, and acceleration in ECEF;on in ECEF;
Navigation-grade ephemeris is provided in 208 bits for a single GLONASS SV;Navigation-grade ephemeris is provided in 208 bits for a single GLONASS SV; Broadcast information is valid for 15 minutes or more.Broadcast information is valid for 15 minutes or more.
– Numerical integration is necessary to compute position of GLONASS satellites;Numerical integration is necessary to compute position of GLONASS satellites;– Note: centripental acceleration is removed from transmitted information.Note: centripental acceleration is removed from transmitted information.
These terms can be computed for the specific position and velocity of SV;These terms can be computed for the specific position and velocity of SV; GLONASS ICD A.3.1.2 gives the equations below (with some corrections).GLONASS ICD A.3.1.2 gives the equations below (with some corrections).
Perturbation Perturbation terms in terms in
ephemerisephemeris

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 1313
GLONASS EphemerisGLONASS EphemerisItem Bits Range Resolution Contents
tb 7 15-1425 min 15 min Epoch time
n 22 2-9 s 2-30 s Clock correction (const)
n 11 2-30 s/s 2-40 s/s Clock correction (1st order)
x 27 27000 km 2-11 km Position X in ECEF
y 27 27000 km 2-11 km Position Y in ECEF
z 27 27000 km 2-11 km Position Z in ECEF
vx 24 4.3 km/s 2-20 km/s Velocity X in ECEF
vy 24 4.3 km/s 2-20 km/s Velocity Y in ECEF
vz 24 4.3 km/s 2-20 km/s Velocity Z in ECEF
5 6.2 m/s2 2-30 km/s2 Acceleration X in ECEF (only perturbation)
5 6.2 m/s2 2-30 km/s2 Acceleration Y in ECEF (only perturbation)
5 6.2 m/s2 2-30 km/s2 Acceleration Z in ECEF (only perturbation)
Total 208
xx
yy
zz
....
....
....

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 1414
Part 2Part 2
Implementation and ExperimentImplementation and Experiment

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 1515
Software ImplementationSoftware Implementation• ENRI’s software SBAS simulator:ENRI’s software SBAS simulator:
– ‘‘RTWAD’ runs on usual PC and Linux Workstations;RTWAD’ runs on usual PC and Linux Workstations;– Generates SBAS message stream: one message per second;Generates SBAS message stream: one message per second;– Run modes:Run modes:
Offline operation mode: for preliminary investigation using RINEX files;Offline operation mode: for preliminary investigation using RINEX files; Realtime operation mode: verification of actual performance with realtime raw data.Realtime operation mode: verification of actual performance with realtime raw data.
– Needs user-domain receiver software to evaluate performance.Needs user-domain receiver software to evaluate performance.• Upgrade for GLONASS (and QZSS):Upgrade for GLONASS (and QZSS):
– Input module: RINEX observation and navigation files containing GLONASS;Input module: RINEX observation and navigation files containing GLONASS;– Implemented GLONASS extension of SBAS standard;Implemented GLONASS extension of SBAS standard;– User-domain receiver software is also upgraded to be GLONASS-capable;User-domain receiver software is also upgraded to be GLONASS-capable;– QZSS is also supported as it is taken into account like GPS.QZSS is also supported as it is taken into account like GPS.
Software SBAS Software SBAS Simulator Simulator (RTWAD)(RTWAD)
User-Domain User-Domain ReceiverReceiverSoftwareSoftware
Network GPSNetwork GPSobservablesobservables
Position ErrorPosition Error
SBAS Message StreamSBAS Message StreamPosition Position OutputOutput
User-side observationsUser-side observations
Reference station Reference station observationsobservations

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 1616
Dynamic PRN MaskDynamic PRN Mask• Dynamic PRN mask:Dynamic PRN mask:
– Changes PRN mask dynamically to reflect the actual visibility of satellites;Changes PRN mask dynamically to reflect the actual visibility of satellites;– Set PRN masks ON for satellites whose pseudorange observations are available; Set PRN masks ON for satellites whose pseudorange observations are available;
Not based on prediction by almanac information not provided by RINEX;Not based on prediction by almanac information not provided by RINEX;– Semi-dynamic PRN mask: Fix masks ON for GPS and QZSS, and change dynamSemi-dynamic PRN mask: Fix masks ON for GPS and QZSS, and change dynam
ically only for GLONASS to reduce receiver complexity.ically only for GLONASS to reduce receiver complexity.
• Transition of PRN mask:Transition of PRN mask:– Periodical update of PRN mask: updates every 30 minutes;Periodical update of PRN mask: updates every 30 minutes;– Transition time 180s is given to users to securely catch the new PRN mask.Transition time 180s is given to users to securely catch the new PRN mask.
FCFC
PRN Mask (IODP=PRN Mask (IODP=ii)) PRN Mask (IODP=PRN Mask (IODP=ii+1+1))
ttcutovercutover180s180s
FCFC LTCLTC FCFC FCFC LTCLTC FCFC FCFC LTCLTC FCFC FCFC
Corrections before cutoverCorrections before cutover Corrections after cutoverCorrections after cutover
Transition timeTransition time CutoverCutover

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 1717
GLONASS Time OffsetGLONASS Time Offset• Realtime computation:Realtime computation:
– Computes as the difference between receiver clocks for a group of GPS satellites Computes as the difference between receiver clocks for a group of GPS satellites (and QZSS) and the other group of GLONASS satellites;(and QZSS) and the other group of GLONASS satellites;
– Enough accuracy with a filter of long time constant;Enough accuracy with a filter of long time constant;– Need no almanac information broadcast by GLONASS satellites;Need no almanac information broadcast by GLONASS satellites;– Transmitted to users via Message Type 12 of SBAS.Transmitted to users via Message Type 12 of SBAS.
tt ttGPSGPSttGLONASSGLONASS ttRR
ttGPSGPS
ttGLONASSGLONASS BBGLONASSGLONASS^̂
BBGPSGPS^̂
TrueTrueTimeTime
GLONASSGLONASSSystem TimeSystem Time
GPSGPSSystem TimeSystem Time
ReceiverReceiverTimeTime
aaGLONASSGLONASS
Receiver clock forReceiver clock forGPS satellitesGPS satellites
Receiver clock forReceiver clock forGPS satellitesGPS satellites
Time offset Time offset broadcast to usersbroadcast to users

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 1818
Experiment: Monitor StationsExperiment: Monitor Stations
• Recently Japanese GEONET Recently Japanese GEONET began to provide GLONASS and began to provide GLONASS and QZSS observables in addition to QZSS observables in addition to GPS;GPS;
• Currently more than 150 stations Currently more than 150 stations are GLONASS/QZSS-capable;are GLONASS/QZSS-capable;
• Data format: RINEX 2.12 Data format: RINEX 2.12 observation and navigation files.observation and navigation files.
• For our experiment:For our experiment: 8 sites for reference stations;8 sites for reference stations;
Reference Station (1) to (8)Reference Station (1) to (8) 3 sites for evaluation.3 sites for evaluation.
User Station (a) to (c)User Station (a) to (c)• Period: 12/7/18 – 12/7/20 (3 days).Period: 12/7/18 – 12/7/20 (3 days).

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 1919
PRN Mask TransitionPRN Mask Transition
• Reflecting our implementation, PRN Reflecting our implementation, PRN mask is updated periodically at every mask is updated periodically at every 30 minutes;30 minutes;
• Semi-dynamic PRN mask: GPS and Semi-dynamic PRN mask: GPS and QZSS satellites are always ON in the QZSS satellites are always ON in the masks;masks;
• PRN masks for GLONASS satellites PRN masks for GLONASS satellites are set ON if the satellite are visible are set ON if the satellite are visible and augmented;and augmented;
• Stair-like shape: because the slot Stair-like shape: because the slot number of GLONASS satellites are number of GLONASS satellites are assigned increasingly along with the assigned increasingly along with the orbit.orbit.
• IODP (issue of Data, PRN Mask) IODP (issue of Data, PRN Mask) indicates change of PRN mask.indicates change of PRN mask.
GPSGPS
GLONASSGLONASS
QZSSQZSS

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 2020
Elevation AngleElevation Angle
• Rising satellites appear at 5-12 deg above the horizon; Latency due to periodical Rising satellites appear at 5-12 deg above the horizon; Latency due to periodical update of PRN mask;update of PRN mask;
• However, GPS satellites also have similar latency; Not a major problem because However, GPS satellites also have similar latency; Not a major problem because low elevation satellites contribute a little to improve position accuracy.low elevation satellites contribute a little to improve position accuracy.
GPSGPS
GLONASSGLONASS
QZSSQZSS
PRN MaskPRN MaskTransitionTransition
5 deg5 deg
@ Tokyo@ Tokyo

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 2121
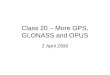
# of Satellites vs. Mask Angle# of Satellites vs. Mask Angle
• Introducing GLONASS satellites increases the number of satellites in roughly 75%;Introducing GLONASS satellites increases the number of satellites in roughly 75%;• QZSS increases a satellite almost all day by only a satellite on the orbit, QZS-1 "Michibiki" QZSS increases a satellite almost all day by only a satellite on the orbit, QZS-1 "Michibiki" • Multi-constellation with QZSS offers 17 satellites at 5 deg and 9.8 satellites even at 30 deg.Multi-constellation with QZSS offers 17 satellites at 5 deg and 9.8 satellites even at 30 deg.
9.8 SVs9.8 SVs
17 SVs17 SVs
7.4 SVs7.4 SVs
@ User (b)@ User (b)

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 2222
Availability vs. Mask AngleAvailability vs. Mask Angle
• The number of epochs with position solution decreases with regard to increase The number of epochs with position solution decreases with regard to increase of mask angle;of mask angle;
• Multi-constellation with QZSS achieves 100% availability even for 40 deg mask.Multi-constellation with QZSS achieves 100% availability even for 40 deg mask.
100% 100% AvailabilityAvailability
@ User (b)@ User (b)

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 2323
DOP vs. Mask AngleDOP vs. Mask Angle
• GLONASS-only users suffer poor geometries;GLONASS-only users suffer poor geometries;• Multi-constellation with QZSS offers HDOP of 2.3 even for 40 deg mask.Multi-constellation with QZSS offers HDOP of 2.3 even for 40 deg mask.
@ User (b)@ User (b)
HDOP = 2.3HDOP = 2.3

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 2424
User Position Error: Mask 5degUser Position Error: Mask 5deg
• GPS+GLO+QZS: 0.310m RMS of horizontal error at user location (b);GPS+GLO+QZS: 0.310m RMS of horizontal error at user location (b);• Looks some improvement by using multi-constellation.Looks some improvement by using multi-constellation.

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 2525
User Position Error: Mask 30degUser Position Error: Mask 30deg
• GPS+GLO+QZS: 0.372m RMS of horizontal error at user location (b);GPS+GLO+QZS: 0.372m RMS of horizontal error at user location (b);• Multi-constellation offers a good availability even for 30 deg mask.Multi-constellation offers a good availability even for 30 deg mask.

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 2626
RMS Error vs. Mask: User (a)RMS Error vs. Mask: User (a)
• Northernmost user location;Northernmost user location;• Multi-constellation provides robust position information through Multi-constellation provides robust position information through
mask angle of 5 to 40 deg.mask angle of 5 to 40 deg.
@ User (a)@ User (a)
0.528m0.528m

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 2727
RMS Error vs. Mask: User (b)RMS Error vs. Mask: User (b)
• User location near the centroid of reference station network;User location near the centroid of reference station network;• For vertical direction, 10 deg mask shows the best accuracy except For vertical direction, 10 deg mask shows the best accuracy except
GLONASS only case.GLONASS only case.
@ User (b)@ User (b)
0.602m0.602m

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 2828
RMS Error vs. Mask: User (c)RMS Error vs. Mask: User (c)
• Southernmost user location;Southernmost user location;• There is little dependency upon user location; possibly because There is little dependency upon user location; possibly because
ionosphere condition is quiet for the period of this experiment.ionosphere condition is quiet for the period of this experiment.
@ User (c)@ User (c)
0.588m0.588m

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 2929
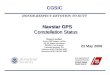
Vertical Protection LevelVertical Protection Level
GPS+GLO+QZSGPS+GLO+QZSGPS onlyGPS only
• Protection levels mean the confidence limit at 99.99999% confidential level;Protection levels mean the confidence limit at 99.99999% confidential level;• In these chart, unsafe condition exists if there are plots at the right of the diagonal line;In these chart, unsafe condition exists if there are plots at the right of the diagonal line;• GLONASS reduces VPL; Means improvement of availability of navigation.GLONASS reduces VPL; Means improvement of availability of navigation.
Reduce

ION GNSS Sept. 2012ION GNSS Sept. 2012 - Slide - Slide 3030
ConclusionConclusion• Combined use of GPS and GLONASS with SBAS:Combined use of GPS and GLONASS with SBAS:
– Multi-constellation SBAS, capable of augmenting both GPS and GLONASS, aMulti-constellation SBAS, capable of augmenting both GPS and GLONASS, and additionally QZSS, is implemented and tested successfully;nd additionally QZSS, is implemented and tested successfully;
– Potential problems and solutions on realizing a multi-constellation SBAS basePotential problems and solutions on realizing a multi-constellation SBAS based on the current standard were investigated;d on the current standard were investigated;
– It is confirmed that the performance of SBAS-aided navigation is certainly impIt is confirmed that the performance of SBAS-aided navigation is certainly improved by adding GLONASS, especially when satellite visibility is limited;roved by adding GLONASS, especially when satellite visibility is limited;
– Adding GLONASS also reduces protection levels and thus improves availabilitAdding GLONASS also reduces protection levels and thus improves availability of navigation.y of navigation.
• Ongoing and future works:Ongoing and future works:– Support of realtime operation mode;Support of realtime operation mode;– Realtime operation test broadcasting augmentation information for both GPS Realtime operation test broadcasting augmentation information for both GPS
and GLONASS on QZSS L1-SAIF augmentation channel;and GLONASS on QZSS L1-SAIF augmentation channel;– Use GLONASS observables in generation of ionospheric correction;Use GLONASS observables in generation of ionospheric correction;– Mixed use of different types of receiver for reference stations;Mixed use of different types of receiver for reference stations;– Further extension to support Galileo.Further extension to support Galileo.