Embed Size (px)
Citation preview

System Identification and Precision Control of Linear Actuators with Friction
Seiji HashimotoDepartment of Electronic Engineering, Gunma University,
1-5-1 Tenjin-cho, Kiryu, Gunma, 376-8515, JAPAN
Keywords: ultra-precision stage, ultrasonic motor, friction drive, precision positioning, continuous-path tracking, variable-frequency drive, internal model control
Abstract. In recent years, a high-precision stage has received great attention due to the progress of nano-technology. This paper presents the development of an ultra-precision stage control system by introducing the nonresonant ultrasonic motor (NRUSM). System identification experiments are carried out considering the fundamental characteristic of NRUSM. The friction, which affects the accuracy of the positioning, is evaluated. Then the relation between the friction and the control bandwidth is experimentally examined. Using the frictional property as well as the identified model, the position control system with friction compensation is designed. Next, the friction model is adopted for the proposed continuous-path tracking control design, and then the efficiency of the model-based control is verified by positioning experiments. Moreover, control related topics to the NRUSM-driven precision stage are overviewed. The effectiveness of the proposed identification and control methods for linear actuators is verified through simulations and experiments.
Introduction
According to the 2005 International Technology Roadmap for Semiconductor, it is expected that the technology node defined by the half-pitch of DRAM will reach 65 nm in 2007 and 45 nm in 2010 [1]. The positioning accuracy required for the ultra-precision stage for semiconductor manufacturing is one tenth or less of the technology node, and it reaches sub-nanometer range. In such situation, from the viewpoint of the precision stage control, the following control characteristics are required;
- High-speed and fast-response characteristics for increasing product throughput;- High-precision positioning characteristic which agrees with sensor resolution;- Smallness of design parameter’s number and simplicity of tuning for on-site setup;- Assuring control performance over long-term utilization;- Open-loop-based control for calculation burden and control bandwidth;In this paper, identification and control methods for linear actuator-driven precision stages are
presented.
Controlled object: Nonresonant Ultrasonic Motor-Driven Precision Stage
Conventional precision stages are generally constructed by a linear guide, stepping motor and a ball/lead-screw. The position resolution is limited by the step angle of the motor that establishes a positioning limit in the nanometer range. There is a technique which uses a direct drive type actuator to minimize this problem that does not involve a rotation to rectilinear motion transferring mechanism. Especially, the no contacting and clean magnetic-type linear motor is a trend for precision stages. However, to meet the requirements established by standards for semiconductor manufacturing, the use of a magnetic shielding and a coil cooling system are necessary. Thus the mechanism becomes more complicated, bigger and costly. The ultrasonic motor (USM) is another
Invited PaperSAMPLE

type of direct drive actuator that makes use of the AC characteristics of a piezoelectric material. Due to the USMs are of the contact type, high-speed and high-power drive is possible by taking the advantage of the mechanical resonance of the system. This mechanical resonance is obtained through the use of the piezoelectric material. However, this machine resonance deteriorates the nanometer-range positioning and increases the dead time which consumes electric power.
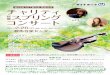
The authors have been developed a new high-resolution high-speed actuator named NRUSM that uses the DC characteristics of a piezoelectric device [2]. The controlled object is a 100 mm-stroke precision stage driven by the linear actuator-type nonresonant ultrasonic motor (NRUSM). Figure 1 shows NRUSM, the actuator properties, the drive sequence and the NRUSM-driven stage. NRUSM has eight legs. Each leg is structured by eight-stacked piezoelectric plates, the upper four plates are for the expand motion and the bottom four plates are for the shear motion. The friction tip of the NRUSM contacts the guide plate installed at the side of the stage. By applying the sinusoidal input voltage to the both motions' piezoelectric plates, it is possible to drive the elliptical orbit in the friction tip. The phase difference between the two motions is /2 rad, and between two legs is rad. The experimental setup of the NRUSM-driven precision stage is illustrated in Figure 2. The stage moves along the crossed roller guides. The position of the stage is measured by the combination of the linear scale and the linear encoder with a resolution of 10 nm. The maximum displacement of the friction tip is 700 nm. The contacting plate is made of the almina ceramics with a surface roughness of 200 nm (Ra). Therefore, the frictional conditions are strongly dependent on the conditions of the contacting plate.
System Identification of NRUSM-Driven Precision Stage
Since the NRUSM-driven stage utilizes a friction drive mechanism, the control performance is strongly dependent on the contact condition between NRUSM and the contacting guide plate. In this section, the friction property is identified. The identified friction characteristic at steady state velocity is defined by the following equation [3];
(1)
where x and v0 represent position and stribeck velocity, respectively. 0, 0+1 and 2 are Coulomb friction, static friction and viscous friction, respectively. For the positive direction, the identified parameters are v0=0.17, 0=13.1, 1=2.0 and 2=1.74, and for the negative direction, the parameters are v0=0.14, 0=14.6, 1=1.6 and 2=1.70. From the relationship (1), the friction at zero
20mm
preload mechanism
piezoelectric actuator20mm
preload mechanism
piezoelectric actuator 4(shear)4(expand)layer
101010-12 m/Vshear
66010-12 m/Vexpand
6.0 mm3.0 mm0.6 mmdimension
7.8103 kg/m3density
Pb(Zr,Ti)O3material
4(shear)4(expand)layer
101010-12 m/Vshear
66010-12 m/Vexpand
6.0 mm3.0 mm0.6 mmdimension
7.8103 kg/m3density
Pb(Zr,Ti)O3material
Slider (Aluminum)
Base plate (Aluminum) SPIDER
Guide plate(Alumina ceramics)
Slider (Aluminum)
Base plate (Aluminum) SPIDER
Guide plate(Alumina ceramics)
4
Stage feed direction
Sequence0
1
2
345
6
7
4
Stage feed direction
Sequence0
1
2
345
6
7
Figure 1. Ultra-precision stage driven by linear motor (NRUMS)
Linear encoder
Linearguide
Limitsensor
SPIDER
Stage
Scale
control input
positionsignal
PCoperator
limitsignal
GuidePlate
Limitsensor
Motion controllerwith servo system
Linear encoder
Linearguide
Limitsensor
SPIDER
Stage
Scale
control input
positionsignal
PCoperator
limitsignal
GuidePlate
Limitsensor
Motion controllerwith servo system
Figure 2. Experimental setup for NRUSM-driven stage

velocity is larger than the one at low velocity. Therefore, using a integral controller like in servo systems produces the stick-slip phenomenon in which the response vibrates around the reference value [4]. In order to prevent this stick-slip phenomenon, control methods considering friction property are required.
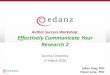
Considering the importance of the position dependence, the friction characteristics are identified as a function of the stage position [5], [6]. Here, we focus on the relationship between the static friction and the contacting plate. The static friction is illustrated in Figure 3. The different properties around 14 mm and 105 mm can be seen. The scratched marks shown in Figure 4 (a) were detected at these positions. Moreover, Figure 4 (b) shows the line profile of the contacting plate. It is noticed that the inclination of the plate around 70 mm strongly affects to the static friction. From these results, the condition of the contacting plate can be predicted from the identified frictions.
Precision Control of NRUSM-Driven Stage
(1) Model-Based Friction Compensation and Continuous-Path Tracking ControlThe friction compensation block diagram for the proposed continuous-path tracking control
system is shown in Figure 5. The plant model derived by identification experiments considering the friction [5] is
(2)
where k1=251.8, p1 = 720.4. The friction compensation by the bang-bang control [7], which is the friction model-based feedforward technique, is performed for the static friction identified in the previous section. The method consists in adding the static friction voltage to the control input using the position information and the sign of tracking error information when the stage is stopped [6];
(3)
(a) For positive direction11
17
Stat
ic fr
ictio
n [V
]
13
15
-13
-11
-9
Position [mm]
Stat
ic fr
ictio
n [V
]
0 20 40 60 80 100 120
-15
(b) For negative direction
(a) For positive direction11
17
Stat
ic fr
ictio
n [V
]
13
15
-13
-11
-9
Position [mm]
Stat
ic fr
ictio
n [V
]
0 20 40 60 80 100 120
-15
(b) For negative direction
Figure 3. Position dependence of static friction
(a) Marks around 14 mm and 105 mm
105 mm14 mm 105 mm14 mm
(b) Line profile (x-z plane:y=10 mm)
0 20 40 60 80 100-5
0
5
position [mm]
roug
hnes
s [m
] 14 mm14 mm
optical microscopemagnification ×: 250
Figure 4. Condition of contacting plate

The controller was designed so that the bandwidth of the position control system become 100 Hz as follows;
(4)
where $ kp=1.59103, ki = 1.00105.In the robust control-based NRUSM, the disturbance feedback and the velocity feedback for the
purpose of tracking performance improvement is adopted. In order to estimate the disturbance and velocity, the state-observer is introduced. By this velocity feedback control (VFC) , the identified model expressed by (2) is modified as follows
(5)
where the velocity feedback gain kv is 7.12. The compensation gain to equalize the steady gain of (2) and (5) is 3.49. The continuous-path tracking controller [6],[8] is
(6)
The gain plots for the PI control system, the robust control-based PI control system and the CPTC system are shown in Figure 6. Moreover, anti-windup compensation [\cite{ohishi2}] has been employed for control input saturation resulting from the wide control bandwidth.
100 times positioning from 5 mm to 105 mm with 1mm interval was carried out for this control system. The positioning condition at each step was: that the position agrees to the reference value in five consecutive samples. In this compensation, the identified friction was multiplied by 0.82 in order to prevent the overcompensation. The experimental results for the PI control sysetm and the CPTC system when the friction model was used are shown in Figure 7. Also as a reference, the results when the average value of the friction model was used are illustrated in the same figure. For the PI control system shown in Figure 7 (a), it can be noticed that the positioning is delayed at some positions when the average value was used. However, it is improved when the model-based compensation was used. As a result, the time positioning was shorten by 44.3 %. For the CPTC system shown in Figure 7 (b), the positioning time can be much shortened comparing to the PI control system. Moreover, 5.8 % shortening can be performed by the friction model-based compensation.
PIController
posref
pos.
ddt
vel.
e u Robust controlbased NRUSM
bang-bang compensator
Continuous-PassTracking Controller
vel.=0e>0 : usp(x)e<0 : usn(x)
uffupi
Figure 5. Friction model-based continuous-path tracking control system
101 102 103 104-50-40-30-20-10
010
Frequency [rad/s]
Gai
n [d
B]
: PI + VFC + CPTC: PI + VFC: only PI
: PI + VFC + CPTC: PI + VFC: only PI
Figure 6. Comparison of bandwidth forposition control systems

(2) Variable Frequency Control for High-Precision and High Speed ControlIn the research previously mentioned, the amplitude of the applied voltage was selected as the control input in which the drive frequency was constant. The frequency variable is one of the original features of the NRUSM, something that was impossible in the conventional resonant-type actuator. In [9], [10], the novel control technique considering the ability of changing the drive frequency is proposed based on the scheduled H-infinity control theory. The effectiveness of the proposed control system is verified through simulations and experiments.
(3) Disturbance Observer-Based Internal Model ControlIn the field where the high control performance is required, the various control theory is applied[*]. However, the design method and on-site adjustment are sometimes difficult, and since the design is based on the feedback compensation, the wide banding of the control system is limited due to the noise amplification problem. Though the internal model control (IMC) [11] is an effective design method to overcome such problems and is widely applied for process control systems, some disadvantages exist on the precision positioning control.
The author proposes a disturbance observer-based IMC method for precision positioning systems. The control structure is based on the open-loop compensation, and the feedback is carried out only when modeling error and disturbance are occurred. The advantages of the proposed design method of the positioning control system are no-overshoot, easy-design and simple realization comparing to the conventional IMC method for the integral process [12]. The effectiveness of the proposed design method is verified thorough experiments with the NRUSM-driven ultra-precision stage [13].
Another Control Related Subjects
- Multi-mode vibration control of flexible structures [14],[15]- Autonomous flight control of a large-scale unmanned helicopter [16]-[18]- Engine control systems design for low emission vehicles [19],[20]- Robust control for digital power supply
0 5 10 15 20 25 300
20406080
100120
Time [s]
Posi
tion
[mm
]
: friction model based: average of friction
0 5 10 15 20 25 300
20406080
100120
Time [s]
Posi
tion
[mm
]
: friction model based: average of friction: friction model based: average of friction
0 1.0 2.0 3.0 4.0 5.00
20406080
100120
Time [s]
Posi
tion
[mm
]
: friction model based: average of friction
0 1.0 2.0 3.0 4.0 5.00
20406080
100120
Time [s]
Posi
tion
[mm
]
: friction model based: average of friction: friction model based: average of friction
Figure 7. Comparison of friction compensation for 100 times positioning(PI and CPT control systems)
(a) PI control system (b) continuous-path tracking control system

Possible Collaborations with Others
Intelligent control technology permeates every aspect of our lives. Especially, a high-precision and high-speed control is strongly required, so that focusing on cooperation with the following technology is quite important.(1) Collaboration with the sensing technology
At the accuracy of the control, the sensor’s resolution is critical. For nanometer-range positioning, the accuracy is the same as the resolution of the sensor. In this situation, the cooperation with the sensing technology and control technology is desired.
(2) Collaboration with the accurate modeling technologyThe modeling is the important factor which directly influences the control performance. The precise modeling technique based on first principles and system identification considering the nonlinearity is desired.
(3) Collaboration with the force measurement technologyRecently, motion control in unknown environment will be more and more important. Conventional position or velocity controls are not always suitable to the environment. In such fields, force measurement and control is the key technology of motion control.
(4) Collaboration with the image processingRecently, visual servo tracking using the 3D image processing is used in industry field. The key technology for accurate tracking is the calculation burden for the image processing and the control.
(5) Collaboration with control application fieldsThe control is the key technology for making systems intelligent. The developed control strategies will be effective.
AcknowledgmentThis study was partially supported by the Ministry of Education, Science, Sports and Culture, Grant-in-Aid for Young Scientists.
References[1] International Technology Roadmap for Semiconductors: Lithography (2005).[2] Y. Egashira et al., “Sub-Nanometer Resolution Ultrasonic Motor for 300 mm Wafer Lithography Precision
Stage”, Jpn. J. Appl. Phys., Vol.41, No.9, pp.5858-5863 (2002).[3] C. Canudas de Wit, H. Olsson, K. J. Astrom, and P. Lischinsky, “A new model for control of systems with
friction”, IEEE Trans. on AC, Vol.40, Issue 3, pp.419-425 (1995).[4] B. Armstrong-Helouvry, “Control of Machines with Friction”, Kluwer Academic Publishers (1991).[5] S. Hashimoto, K. Ohishi, T. Ohishi, T. Ishikawa, K. Kosaka, Y. Egashira, H. Kubota and T. Ohmi ,
"Development of an Ultra-Precision Stage Control System Using Nonresonant Ultrasonic Motor, " Proc. of the 29th Annual Conference of the IEEE Industrial Electronics Society(IECON'03), pp.1331-1336, 2003.
[6] S. Hashimoto, K. Ohishi, T. Ohishi, T. Ishikawa, K. Kosaka, Y. Egashira, H. Kubota and T. Ohmi , “Ultra-Precision Stage Control Based on Friction Model of Non-Resonant Ultrasonic Motor,” Proc. of the 8th IEEE International Workshop on Advanced Motion Control (AMC’04), pp. 559-564, 2004.
[7] N. Koreta, H. Okitomo, K. Tsumura, K. Takeuchi, and T. Egawa, “Study of High Accuracy of Machine Tool with Bang-Bang Control”, J. of JSPE, Vol.60, No.3, pp.427-431 (1994).
[8] S. Hashimoto, K. Ohishi, K. Kosaka, T. Ishikawa, H. Kubota and T. Ohmi, “A Control Method of Ultrasonic Acturator-Driven Precision Stages”, IEEJ Trans. IA, Vol.125, No.6, pp.582-589, 2005.
[9] S. Hashimoto, K. Ohishi, K. Kosaka, T. Ishikawa, H. Kubota and T. Ohmi, “Gain-Scheduled Control of a High-Precision Stage for Continuous-Path Tracking,” Proc of International Power Electronics Conference (IPEC2005), S47-3, 2005.

[10] S. Hashimoto, K. Ohishi, K. Kosaka, T. Ishikawa, H. Kubota and T. Ohmi, “Variable Frequency Control for SPIDER-Driven Ultra-Precision Stages,” Proc. of the 16th International Federation of Automatic Control World Congress(IFAC'05), Mo-E16-TO/5, 2005.
[11] M. Morari and E. Zafiriou, Robust Process Control, Prentice Hall, Upper Saddle River, NJ: 1989.[12] D. E. Rivera, M. Morari and S. Skogestad, “Internal Model Control. PID controller design,” Industrial
Chemistry in Process Design and Development, Vol.25, No.1, pp.252-265, 1986.[13] S. Hashimoto, Y. Fujii, M. Kigure and T. Ishikawa, “High-Precision Control of Linear Actuators based on
Internal Model Control,” Proc. of 2nd IEEE Conf. on Industrial Electronics and Applications(ICIEA2007) , 2007.
[14] S. Hashimoto, K. Hara, H. Funato, K. Kamiyama, “AR Based Identification and Control Approach in Vibration Suppression,” IEEE Trans. on Industry Applications, Vol. 37, No. 3, pp. 806-811, 2001.
[15] A. Forrai, S. Hashimoto, H. Funato, and K. Kamiyama, “Robust Active Vibration Suppression Control with Constraint on the Control Signal: Application to Flexible Structures,” An International Journal of Earthquake Engineering \& Structural Dynamics,John Wiley & Sons, Ltd, Vol. 32, pp. 1655-1676, 2003.
[16] S. Hashimoto,T. Ogawa,S. Adachi, A. Tan and G. Miyamori, “System Identification Experiments on a Large-Scale Unmanned Helicopter for Autonomous Flight,” Proc. of IEEE International Conference on Control Applications(CCA2000), pp.850-855, 2000.
[17] S. Adachi, S. Hashimoto, G. Miyamori, and A. Tan, “Autonomous Flight Control for a Large-Scale Unmanned Helicopter,” IEEJ Trans. on Industry Applications, Vol. 121-D, No. 12, pp. 1278-1283, 2001.
[18] S. Hashimoto, S. Adachi, Y. Segawa, G. Miyamori, T. Akasaka and A. Tan, “Construction of Navigation and Control Systems of A Large-Scale Unmanned Helicopter Based on Identified Model,” Proc. of the 15th International Federation of Automatic Control World Congress(IFAC'02),T-Th-E21, 2002.
[19] S. Hashimoto, Y. Okada, H. Okuda, S. Adachi, S. Niwa, M. Kajitani , “Modeling and Deterioration Diagnosis of Catalyst on Vehicle by Variable Forgetting Factor-Based On-Line Identification Method,” Proc. of the 14th IFAC Symposium on System Identification(SYSID-2006), pp. 1364-1369, 2006.
[20] S. Hashimoto, H. Okuda, Y. Okada, S. Adachi, S. Niwa and M. Kajitani, “An Engine Control Systems Design for Low Emission Vehicles by Generalized Predictive Control based on Identified Model,” Proc. of IEEE International Conference on Control Applications(CCA2006), FrA05.3, pp.2411-2416, 2006.
Biography of Prof. Seiji HASHIMOTO:
Seiji Hashimoto received the B.E. M.E. and Ph.D. degrees in Electrical and Electronic Engineering from Utsunomiya University, Tochigi, Japan, in 1994, 1996 and 1999, respectively. From 1996 to 1999, he was a Research Fellow of the Japan Society for the Promotion of Science. He joined the Department of Mechanical Engineering at Oyama National College of Technology, Tochigi, Japan in 2000 as a Research Associate. He joined the Department of Electronic Engineering at Gunma University, Gunma, Japan in 2002 as a Research Associate, and in 2005, he became Associate Professor.
His research interests include system identification, motion control, and its application to industrial fields. He received the IEEE IES best presentation award in 2001 and 2003, and the IEEJ Paper Presentation Award in 1996 and 2005.
He is a member of IEEE IAS, CSS, the Institute of Electrical Engineers of Japan (IEEJ), the Society of Instrument and Control Engineers (SICE), and the Japan Society of Mechanical Engineers (JSME).