Embed Size (px)
Citation preview
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
Jakość i dostępność parametroacutew nawigacyjnychuzyskiwanych z GNSS
latach 2006 ndash 2007 sys-
temy GPS i Glonass zo-
staną uzupełnione o
analogicznie działający
europejski system Galileo (rys 1)
tworząc globalny nawigacyjny
system satelitarny GNSS
Rys 1 Reklama programu Galileo zestrony internetowej Europejskiej AgencjiKosmicznej
Odbiorniki tego systemu mają wniedługim czasie być tak po-
wszechne jak komputery PC i zna-
leźć zastosowanie nie tylko u sto-
sunkowo wąskiej grupy specjali-
stycznych odbiorcoacutew ale prak-
tycznie w każdym gospodarstwie
domowym Szczegoacutelnie przydatne
stają się one już teraz w szeroko
pojętej turystyce ndash żeglarskiej sa-
mochodowej pieszej Pisząc ten
artykuł początkowo kierowałem go
właśnie do żeglarzy ktoacuterzy coraz
częściej kupują odbiorniki GPS i
użytkują bez merytorycznego
przygotowania jakie otrzymują w
Akademii Morskiej nasi
absolwenci Przypominając sobie
jednak egzaminy inżynierskie i
magisterskie oraz pytania kur-
santoacutew SDKO uznałem że podję-
cie tematu jakości parametroacutew na-
wigacyjnych uzyskiwanych
z GNSS jest oczekiwane także
przez bardziej doświadczonych
nawigatoroacutew
W nawigacji morskiej odbiornik
GPS stanowi jedno z podstawo-
wych narzędzi pracy od mniej wię-
cej 15 lat Każdy nawigator wie iż
szczegoacutelnie na akwenach ograni-
czonych bdquodobra praktyka morskardquo
nakazuje weryfikację pozycji GPSmetodami terestrycznymi i radaro-
wymi Młodzi nawigatorzy często
jednak zapominają dlaczego jest to
konieczne Tymczasem specyficzna
budowa statku i charakterystyczne
dla niego właściwości manewrowe
mogą w wielu sytuacjach mieć nie-
korzystny wpływ na odbioacuter sygna-
łoacutew satelitarnych niezbędnych do
wyznaczenia pozycji GPS lub
ogoacutelnie GNSS Nie zawsze roacutewnież
dokładność wyświetlanej pozycji
jest zgodna z oczekiwaniami Dla-
tego ze względoacutew bezpieczeństwa
istotne jest aby każdy użytkownik
systemu GNSS zdawał sobie
sprawę z jego ograniczeń oraz po-
siadł umiejętność prawidłowej in-
terpretacji wskazywanych przez
odbiornik parametroacutew nawigacyj-
nych i ich kontroli
Aby zrozumieć ograniczenia w
możliwości uzyskania pozycji ob-
serwowanej i ograniczenia w do-
kładności tej pozycji należy prze-
śledzić procedurę wyznaczania po-
zycji w typowym odbiorniku
GNSS
1 Zasada wyznaczania pozycji
Wyznaczenie pozycji w odbior-
niku GNSS odbywa się na zasadzie
rozwiązania układu roacutewnań mini-
mum czterech linii pozycyjnych
Pojedynczą bdquolinią pozycyjnąrdquo
(zbiorem punktoacutew do ktoacuterego na-
leży pozycja) jest sfera (po-
wierzchnia kuli) w środku ktoacuterej
znajduje się satelita (rys 2)
Rys 2 Linia pozycyjna w systemieGNSS (sfera o środku w położeniu satelityi promieniu roacutewnym odległości pomiędzyanteną odbiornika a satelitą)
nr 2-3 (38-39) 2004 Akademickie Aktualności Morskie
W
21
0 0 1 0 1 0 0 0
Rys 3 Wyznaczenie odległości do satelity techniką kodową w systemie GNSS
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
Aby wyznaczyć linię pozycyjną
odbiornik uzyskuje z sygnału sa-telitarnego informacje o położeniu
danego satelity i mierzy odległośćdo tego satelity czyli inaczej
otrzymuje wspoacutełrzędne środka iwylicza promień sfery pozycyjnej
Pomiar odległości satelitarnej w
większości zastosowań GNSS od-
bywa się techniką kodową Jej wa-
runki można określić w następujący
sposoacuteb (rys 3)
ndash każdy z satelitoacutew w falę nośną
swojego sygnału ma wmodulo-
wany cyfrowy kod binarny o
ściśle określonych parametrach
czasu rozpoczęcia i trwania
(np ciąg bitoacutew powtarzanyciągle co t PRN = 1ms) po to
żeby utrzymać właściwe
parametry kodu satelita
wyposażony jest w atomowe
wzorce czasu synchronizowane
z centralnym wzorcem w
głoacutewnej stacji kontrolnej w
Colorado Springs w Kalifornii
ndash w odbiorniku generowana jest
replika kodu wysyłanego z sa-
telity zgodnie z tymi samymi parametrami czasu
ndash gdy sygnał satelitarny dociera
do anteny odbiornika następuje
pomiar przesunięcia bitoacutew re-
pliki w stosunku do odebranego
kodu i na podstawie tego czasu
przesunięcia (t PRN ) zliczonej
ilości całych odcinkoacutew kodu (n)
i prędkości fali elektromagne-
tycznej c wyznaczona zostaje
odległość do satelity p s (kod
satelitarny dociera z opoacuteźnie-niem wynikającym z przebytej
drogi)
PRN PRN s t t nc p
Kod cyfrowy służy także prze-
kazaniu wiadomości nawigacyjnej
retransmitowanej przez satelity z
naziemnych stacji kontrolnych
systemu To właśnie w tej wiado-
mości podawane są parametry
efemerydalne satelitoacutew (informacje
o ich położeniu)
Po odebraniu sygnału od kolej-
nego satelity zgodnie z zaprezen-
towana procedurą wyliczana jest
druga sfera pozycyjna Pozycja od- biornika znajduje się w ktoacuterymś z
punktoacutew przecięcia obu sfer czyli
na łuku okręgu (rys 4)
Rys 4 Możliwe punkty pozycji z dwoacutech pomiaroacutew satelitarnych
Po wyznaczeniu linii pozycyjnej
z trzeciego satelity pozycja może
być określona już tylko w dwoacutech
punktach co przy znacznej
odległości między nimi pozwala na
jednoznaczne określenie położenia
anteny odbiornika w trzech wymia-
rach przy założeniu bardzo dobrej
synchronizacji zegaroacutew w odbior-niku i satelitach (rys 5)
Rys 5 Możliwe punkty pozycji z trzech
pomiaroacutew satelitarnych
W praktyce we wspoacutełczesnych
odbiornikach GNSS nie stosuje się
zegaroacutew atomowych i z tego po-
wodu warunek synchronizacji po-
miaru czasu z wzorcem satelitar-
nym nie jest spełniony Konieczny
więc staje się pomiar czwartej linii
(sfery) pozycyjnej w celu korekcji
czasu i jednoznacznego wyznacze-
nia pozycji (rys 6)
Rys 6 Korekcja czasu po sprowadzeniuczterech pomiaroacutew satelitarnych do jed-nego punktu
Do celoacutew nawigacji morskiej
wystarczająca jest pozycja dwu-
wymiarowa i w takim przypadku
odbiornik zastępuje jedną sateli-
tarną sferę pozycyjną powierzchnią
elipsoidy lub geoidy ziemskiej o
promieniu powiększonym o po-
mierzoną przez użytkownika wy-
sokość anteny nad poziomem mo-
rza W przypadku pozycji troacutejwy-
miarowej dla przyjętej powierzchni
elipsoidy ziemskiej tę wysokość
wylicza odbiornik
Podsumowując system GNSS
umożliwia wyznaczenie pozycji w
dwoacutech wymiarach o dowolnej porze
w każdym punkcie globu ziem-skiego do ktoacuterego docierają sy-
gnały z przynajmniej trzech sateli-
toacutew i w trzech wymiarach przy od-
biorze sygnałoacutew od minimum czte-
rech satelitoacutew
W celu zwiększenia dokładności
wyznaczanych parametroacutew pozycji
stosuje się techniki roacuteżnicowe (ang
differential i stąd DGPS DGNSS)
Polegają one na wyznaczeniu
poprawek do zmierzonych
odległości satelitarnych na podsta-wie odległości wyliczonych teore-
tycznie w stacjach referencyjnych o
znanej pozycji Poprawki będące
roacuteżnicami pomiędzy wartościami
zmierzonymi (pseudoodległościami)
a teoretycznymi są następnie
przesyłane publicznym naziemnym
Dokładnie wysokość dodawana jest w kierunku prostopadłym do
stycznej do powierzchni elipsoidy
Akademickie Aktualności Morskie nr 2-3 (38-39) 2004 22
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
łączem radiowym (radiolatarnie
IALA) lub łączem satelitarnym
(satelity geostacjonarne WAAS
EGNOS lub MSAS) do odbiornika
użytkownika (oproacutecz łączy
publicznych dostępne są też łącza
płatne ndash komercyjne) Większość
wspoacutełczesnych odbiornikoacutew
nawigacyjnych DGPS konstru-
owana jest jako jednostki zinte-
growane ndash we wspoacutelnej obudowie
znajduje się odbiornik GPS i antena
GPSWAAS i pośredniofalowa
łącza IALA
2 Wektor prędkości
Wektor prędkości (prędkość i jejkierunek) w odbiorniku GNSS
wyznaczany jest na podstawie reje-
strowanych zmian pozycji w czasie
Na okres za jaki wyznaczany jest
ten wektor operator ma przeważnie
wpływ dzięki ustawieniu stałej filtru
cyfrowego wygładzającego odchyłki
wynikoacutew od średniej W praktyce
należy uwzględnić to że
ndash większa wartość stałej czasowej
filtru (ang filter constant ) po-
woduje opoacuteźnienie zmiany kie-runku i wartości prędkości w
stosunku do rzeczywistości ale
ostateczne parametry są obar-
czone mniejszym błędem (wy-
eliminowane są chwilowe od-
chyłki prędkości)
ndash dynamika ruchu anteny umiesz-
czonej na maszcie może być na
tyle duża (przemieszczenie w
bardzo kroacutetkim odstępie czasu
podczas ruchu na fali) że ko-
nieczne może być zwiększenie
stałej czasowej filtru ndash najlepiej
przetestować reakcję
odbiornika w praktyce
ndash wyznaczone zostają parametry
ruchu względem dna ndash nie
można więc z odbiornika GNSS
odczytać kursu (chyba że jest
to odbiornik dwuantenowy) ale
kąt drogi nad dnem i pręd-
kość względem dna
3 Dostępność pozycji GNSS
Zarządzający systemem GPS
Departament Obrony USA (DoD)
gwarantuje że od momentu rozpo-
częcia fazy operacyjnej systemu
(17071995 r) w każdym punkcie
globu ziemskiego o każdym czasie
powinny być widoczne minimum
cztery satelity W praktyce oznacza
to że minimum cztery satelity po-
winny znajdować się zawsze nad
płaszczyzną horyzontu anteny od-
biornika (prostopadłą do po-
wierzchni Ziemi i przechodzącą
przez podstawę anteny ndash tzw hory-
zont topocentryczny) Nie oznacza
to niestety że z tylu satelitoacutew będą mogły być odebrane sygnały gdyż
widzialność satelitoacutew może być
ograniczona np w wyniku konfigu-
racji odbiornika W praktyce celem
wyeliminowania ujemnego wpływu
przejścia sygnału przez troposferę
pomiary parametroacutew
nawigacyjnych w odbiorniku prze-
prowadza się tylko wtedy kiedy
satelita znajduje się powyżej pewnej
minimalnej wysokości topo-
centrycznej (ang elevation) wzglę-dem anteny odbiornika
Oz
R z
htminP S
Powierzchnia Ziemi
Strefa widzialności satelity
Roacutewnik
Płaszczyzna horyzontu topocentrycznego
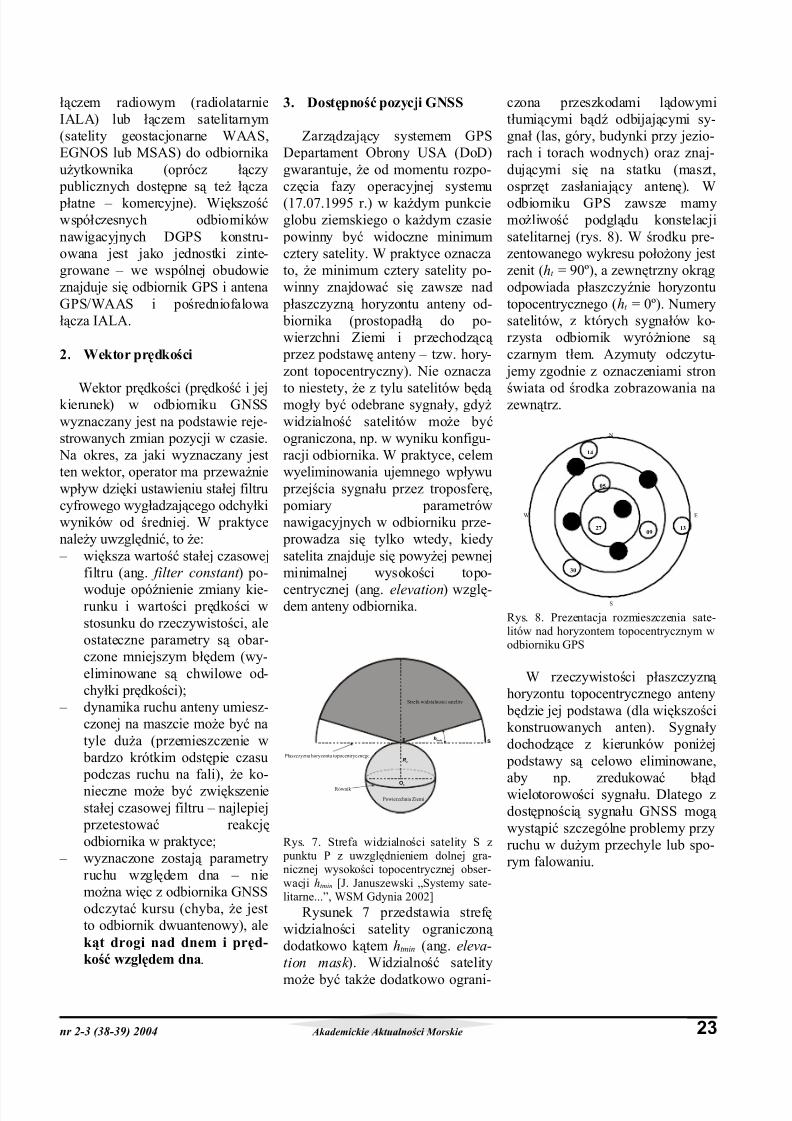
Rys 7 Strefa widzialności satelity S z punktu P z uwzględnieniem dolnej gra-nicznej wysokości topocentrycznej obser-
wacji htmin [J Januszewski bdquoSystemy sate-litarnerdquo WSM Gdynia 2002]
Rysunek 7 przedstawia strefę
widzialności satelity ograniczoną
dodatkowo kątem htmin (ang eleva-
tion mask ) Widzialność satelity
może być także dodatkowo ograni-
czona przeszkodami lądowymi
tłumiącymi bądź odbijającymi sy-
gnał (las goacutery budynki przy jezio-
rach i torach wodnych) oraz znaj-
dującymi się na statku (maszt
osprzęt zasłaniający antenę) W
odbiorniku GPS zawsze mamy
możliwość podglądu konstelacji
satelitarnej (rys 8) W środku pre-
zentowanego wykresu położony jest
zenit (ht = 90ordm) a zewnętrzny okrąg
odpowiada płaszczyźnie horyzontu
topocentrycznego (ht = 0ordm) Numery
satelitoacutew z ktoacuterych sygnałoacutew ko-
rzysta odbiornik wyroacuteżnione są
czarnym tłem Azymuty odczytu-
jemy zgodnie z oznaczeniami stron
świata od środka zobrazowania nazewnątrz
N
W E
S
04
23
16
25
29
14
27 13
30
09
05
Rys 8 Prezentacja rozmieszczenia sate-litoacutew nad horyzontem topocentrycznym wodbiorniku GPS
W rzeczywistości płaszczyzną
horyzontu topocentrycznego anteny
będzie jej podstawa (dla większości
konstruowanych anten) Sygnały
dochodzące z kierunkoacutew poniżej
podstawy są celowo eliminowane
aby np zredukować błądwielotorowości sygnału Dlatego z
dostępnością sygnału GNSS mogą
wystąpić szczegoacutelne problemy przy
ruchu w dużym przechyle lub spo-
rym falowaniu
nr 2-3 (38-39) 2004 Akademickie Aktualności Morskie 23
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
4 Dokładność pozycji GNSS
GPS z wyłączonym od maja
2000 r selektywnym dostępem
(ang SA ndash selective availability)
pozwala na wyznaczanie pozycji bez korekty roacuteżnicowej z dokład-
nością około 20 m przy poziomie
ufności 095 ndash 098 Z korektą roacuteż-
nicową dokładność ta może wzro-
snąć nawet do 1 m Jest to tzw do-
kładność absolutna systemu (ang
absolute accuracy) czyli wyzna-
czona względem teoretycznej ndash
rzeczywistej wartości pozycji w
danym układzie odniesienia (ang
reference datum) Oproacutecz niej
każdy odbiornik cechuje też do-kładność względna (ang relativeaccuracy) charakteryzująca wier-
ność powrotu do wcześniejszej po-
zycji i opisywana zwykle miarą
poziomego odchylenia standardo-
wego
Należy pamiętać iż w praktyce
dokładność względna jest zawszelepsza od absolutnej
5 Czynniki wpływające nadokładność pozycji GNSSpoza kontrolą użytkownika
Jest kilka czynnikoacutew wpływają-
cych na dokładność pozycji uzy-
skanej z systemu GNSS na ktoacutere
użytkownik nie ma wpływu Wy-
mieniam je poniżej w kolejności od
najbardziej do najmniej znaczących
1 Geometria konstelacjisatelitarnej (rys 9)
Na doboacuter satelitoacutew można wpły-
nąć jedynie pośrednio w wyniku
zmiany minimalnej wysokości to-
pocentrycznej (wpływ na liczbę
widzianych satelitoacutew) oraz mak-
symalnej wartości wspoacutełczynnika
jakości geometrycznej pozycji
(HDOP) Nie możemy jednak
zmienić ruchu satelitoacutew po orbicie
Ogoacutelnie im z większej liczby sate-
litoacutew może odbiornik wyznaczyć
pozycję tym niższy DOP i dlatego
nie powinno się celowo blokować
odbioru niektoacuterych satelitoacutew
Rys 9 Wpływ geometrii wybranych przezodbiornik satelitoacutew na wartość HDOP
(ang horizontal dilution of precision)
2 Struktura atmosferyCzas przejścia sygnału uzależ-
niony jest od miejscowej gęstości
jonosfery Parametry jonosfery i
troposfery wpływają na zmierzoną
odległość ndash im satelity są bliżej
płaszczyzny horyzontu tym błąd
pomiaru jest większy i dlatego nie
powinno się zmniejszać minimalnej
wysokości topocentrycznej poniżej
5 nawet kosztem DOP
3 Wielotorowość sygnałoacutew
satelitarnych (rys 10)
Sygnały mogą docierać do od-
biornika nie bezpośrednio najkroacutet-
szą drogą ale w wyniku odbić (ang
multipath)
Rys 10 Wielotorowość sygnału satelitar-nego GNSS
4 Błędy satelitarnych wzorcoacutew
czasu (zegaroacutew atomowych) i
parametroacutew położenia satelitoacutew
(ang ephemeris)
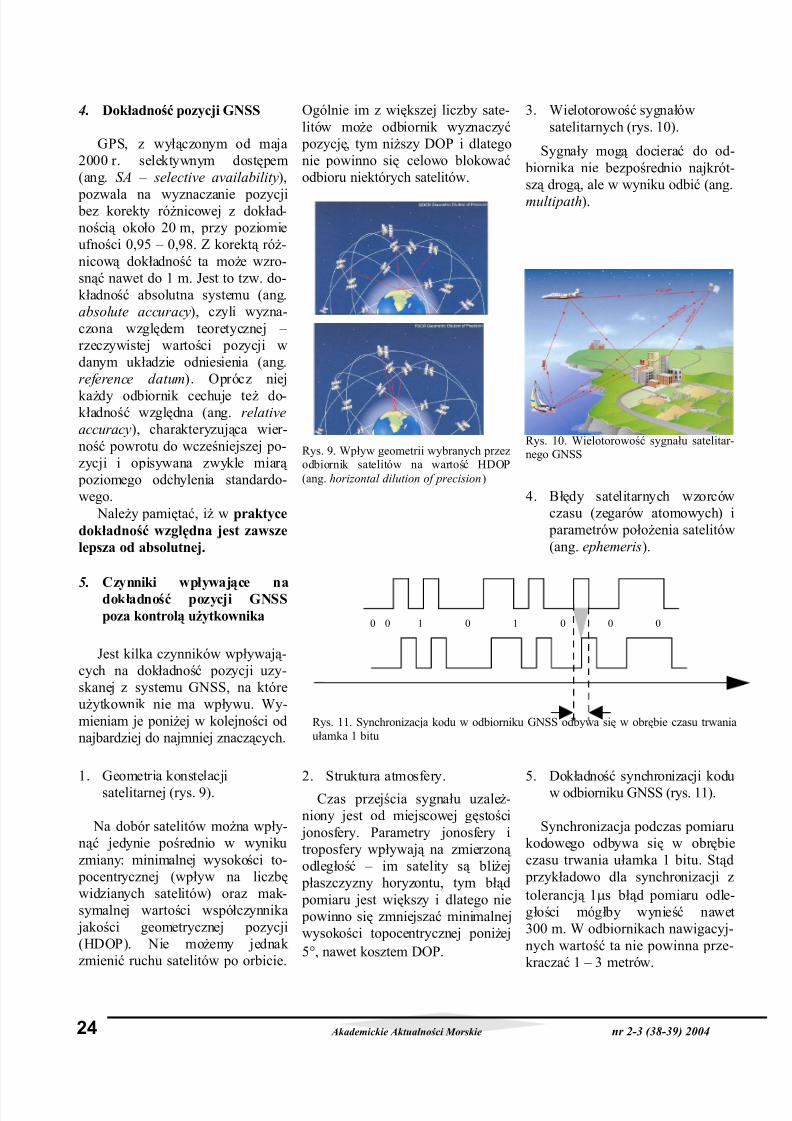
5 Dokładność synchronizacji koduw odbiorniku GNSS (rys 11)
Synchronizacja podczas pomiaru
kodowego odbywa się w obrębie
czasu trwania ułamka 1 bitu Stąd
przykładowo dla synchronizacji z
tolerancją 1s błąd pomiaru odle-
głości moacutegłby wynieść nawet
300 m W odbiornikach nawigacyj-
nych wartość ta nie powinna prze-
kraczać 1 ndash 3 metroacutew
Akademickie Aktualności Morskie nr 2-3 (38-39) 2004 24
Rys 11 Synchronizacja kodu w odbiorniku GNSS odbywa się w obrębie czasu trwania
ułamka 1 bitu
0 0 1 0 1 0 0 0
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
W przypadku pozycji DGNSS
błędy wynikające z przejścia sy-
gnału przez atmosferę i błędy zega-
roacutew są w znaczącym stopniu redu-
kowane Powinno uwzględniać się
jednak wiek poprawki roacuteżnicowej
(ang AOC ndash age of correction)
i związaną z nim konieczność eks-
trapolacji poprawki wynikającej z
a) szybkości wyliczania po-
prawek w stacji referen-
cyjnej
b) szybkości wysyłania popra-
wek roacuteżnicowych ze stacji
referencyjnej (ang
transmission rate)
c) typu wiadomości roacuteżnico-wej
6 Czynniki wpływające na do-kładność pozycji GNSS za-leżne od użytkownika
Przy zakupie i użytkowaniu od-
biornika GNSS powinniśmy zwroacute-
cić uwagę na następujące aspekty
1 Rodzaj odbiornika GNSS
Przy wyborze odbiornika warto
zwroacutecić uwagę na jego specyfikacjętechniczną i zaimplementowane
funkcje nawigacyjne (np lokso-
dromiczne planowanie trasy) Może
się okazać że w tej samej cenie
otrzymamy lepszy sprzęt Ogoacutelnie
im więcej satelitoacutew może
jednocześnie śledzić odbiornik tym
lepiej (decyduje o tym liczba
kanałoacutew odbiorczych ndash ang chan-nel ) Aktualnie standardem stają się
odbiorniki 8 ndash 12-kanałowe dla
ktoacuterych dokładność wyznaczonej
pozycji autonomicznej GPS może
być zbliżona do dokładności czte-
rokanałowego odbiornika DGPS
wcześniejszej generacji Nie ogra-
niczając się zasięgiem stacji refe-
rencyjnej dokładności około kilku
metroacutew można uzyskać zakupując
odbiornik DGPS WAASEGNOS
2 Doboacuter układu odniesienia
Standardowo odbiorniki wy-
świetlają pozycję według WGS 84
Datum Przed naniesieniem tej po-
zycji na mapę należy zweryfikować
według jakiego układu odniesienia
zbudowana jest mapa (rys 12) i
ewentualnie wprowadzić do
odbiornika poprawkę zgodnie z
notką (rys 13) albo właściwy układ
odniesienia Odczytując poprawkę z
mapy warto sprawdzić na ile
znaczący byłby błąd jej nie-
uwzględnienia w skali mapy (często
będzie to grubość ołoacutewka)
Rys 12 Informacja zamieszczona pod ty-
tułem mapy angielskiej odnośnie układuodniesienia
Rys 13 Nota informująca o poprawkachdo pozycji satelitarnych
3 Miejsce zamontowania anteny
Trzeba tu uwzględnić kompromis
możliwości technicznych
przesłonięć anteny i narażenia jej na
uszkodzenia (warto także zwroacutecić
uwagę na standard wodoszczelności
sprzętu)
4 Konfiguracja odbiornika
GNSS
Maksymalna wartość DOP po-
winna być ustalona w granicach 8-10 Dla potrzeb nawigacji morskiej
najlepiej wybrać wyliczanie pozycji
w dwoacutech wymiarach (2D)
wprowadzając wysokość anteny
nad poziomem morza
5 Konfiguracja odbiornika
DGNSS
Aby otrzymać pozycję popra-
wioną roacuteżnicowo należy prawi-
dłowo wprowadzić do odbiornika
dane łącza radiowego ze stacją re-
ferencyjną lub wybrać opcję
WAAS W odbiornikach pracują-
cych na łączu IALA zazwyczaj
trzeba będzie wprowadzić często-
tliwość (ang frequency) i szybkość
transmisji (ang tx rate) stacji refe-
rencyjnej obejmującej nas swoim
zasięgiem Informacje te można
znaleźć w wydawnictwach Admira-
licji Brytyjskiej w 2 tomie Admi-
ralty List of Radiosignals lub w
dotyczącym naszego rejonu pływa-
nia tomie Admiralty Maritime
Communications for the Yachts-
man Dla użytkownikoacutew z dostępem
do internetu IALA zamieszcza także
wykaz stacji referencyjnych na
stronie httpwwwiala-
aismorgwebindexhtmlNajbardziej kluczowe znacze-
nie w każdej sytuacji ma jed-
nakże umiejętność weryfikacjirodzaju pozycji zliczonej obser-wowanej GNSS obserwowanejDGNSS Pomylenie pozycji ob-
serwowanej ze zliczoną lub nieak-
tualną doprowadziło już do wielu
awarii morskich Nie można więc
nigdy mieć bezgranicznego zaufania
do mapy elektronicznej pre-
zentującej pozycję statku z GNSS
Podsumowanie
Aktualne rozwiązania technolo-
giczne nawigacyjnych odbiornikoacutew
GPSGNSS pozwalają na osiągnię-
cie kilkumetrowych dokładności
pozycji Aby jednak były to pozycje
wiarygodne każdy użytkownik
powinien na wstępie zapoznać się z
instrukcją techniczną i obsługi
swojego odbiornika oraz uwzględ-
nić przedstawione czynniki wpły-
wające na dostępność i dokładność
pozycji GNSS Biorąc pod uwagę
specyfikę budowy i ruchu statku lub
jachtu może to mieć istotne
znaczenie szczegoacutelnie w nie-
sprzyjających warunkach pogodo-
wych i na akwenach ograniczonych
Paweł Zalewski
nr 2-3 (38-39) 2004 Akademickie Aktualności Morskie 25
SATELLITE-DERIVED POSITIONSPositions derived from satellite navigationsystems are normally referred to WGSDatum the latitudes of such positions can be plotted directly on this chart but longitudesshould be moved 01 minutes EASTWARDto agree with this chart
Positions are referred to Ordnance Survey of Great Britain (1936) Datum (see SATELLITE -DERIVED POSITIONS note)

5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
Aby wyznaczyć linię pozycyjną
odbiornik uzyskuje z sygnału sa-telitarnego informacje o położeniu
danego satelity i mierzy odległośćdo tego satelity czyli inaczej
otrzymuje wspoacutełrzędne środka iwylicza promień sfery pozycyjnej
Pomiar odległości satelitarnej w
większości zastosowań GNSS od-
bywa się techniką kodową Jej wa-
runki można określić w następujący
sposoacuteb (rys 3)
ndash każdy z satelitoacutew w falę nośną
swojego sygnału ma wmodulo-
wany cyfrowy kod binarny o
ściśle określonych parametrach
czasu rozpoczęcia i trwania
(np ciąg bitoacutew powtarzanyciągle co t PRN = 1ms) po to
żeby utrzymać właściwe
parametry kodu satelita
wyposażony jest w atomowe
wzorce czasu synchronizowane
z centralnym wzorcem w
głoacutewnej stacji kontrolnej w
Colorado Springs w Kalifornii
ndash w odbiorniku generowana jest
replika kodu wysyłanego z sa-
telity zgodnie z tymi samymi parametrami czasu
ndash gdy sygnał satelitarny dociera
do anteny odbiornika następuje
pomiar przesunięcia bitoacutew re-
pliki w stosunku do odebranego
kodu i na podstawie tego czasu
przesunięcia (t PRN ) zliczonej
ilości całych odcinkoacutew kodu (n)
i prędkości fali elektromagne-
tycznej c wyznaczona zostaje
odległość do satelity p s (kod
satelitarny dociera z opoacuteźnie-niem wynikającym z przebytej
drogi)
PRN PRN s t t nc p
Kod cyfrowy służy także prze-
kazaniu wiadomości nawigacyjnej
retransmitowanej przez satelity z
naziemnych stacji kontrolnych
systemu To właśnie w tej wiado-
mości podawane są parametry
efemerydalne satelitoacutew (informacje
o ich położeniu)
Po odebraniu sygnału od kolej-
nego satelity zgodnie z zaprezen-
towana procedurą wyliczana jest
druga sfera pozycyjna Pozycja od- biornika znajduje się w ktoacuterymś z
punktoacutew przecięcia obu sfer czyli
na łuku okręgu (rys 4)
Rys 4 Możliwe punkty pozycji z dwoacutech pomiaroacutew satelitarnych
Po wyznaczeniu linii pozycyjnej
z trzeciego satelity pozycja może
być określona już tylko w dwoacutech
punktach co przy znacznej
odległości między nimi pozwala na
jednoznaczne określenie położenia
anteny odbiornika w trzech wymia-
rach przy założeniu bardzo dobrej
synchronizacji zegaroacutew w odbior-niku i satelitach (rys 5)
Rys 5 Możliwe punkty pozycji z trzech
pomiaroacutew satelitarnych
W praktyce we wspoacutełczesnych
odbiornikach GNSS nie stosuje się
zegaroacutew atomowych i z tego po-
wodu warunek synchronizacji po-
miaru czasu z wzorcem satelitar-
nym nie jest spełniony Konieczny
więc staje się pomiar czwartej linii
(sfery) pozycyjnej w celu korekcji
czasu i jednoznacznego wyznacze-
nia pozycji (rys 6)
Rys 6 Korekcja czasu po sprowadzeniuczterech pomiaroacutew satelitarnych do jed-nego punktu
Do celoacutew nawigacji morskiej
wystarczająca jest pozycja dwu-
wymiarowa i w takim przypadku
odbiornik zastępuje jedną sateli-
tarną sferę pozycyjną powierzchnią
elipsoidy lub geoidy ziemskiej o
promieniu powiększonym o po-
mierzoną przez użytkownika wy-
sokość anteny nad poziomem mo-
rza W przypadku pozycji troacutejwy-
miarowej dla przyjętej powierzchni
elipsoidy ziemskiej tę wysokość
wylicza odbiornik
Podsumowując system GNSS
umożliwia wyznaczenie pozycji w
dwoacutech wymiarach o dowolnej porze
w każdym punkcie globu ziem-skiego do ktoacuterego docierają sy-
gnały z przynajmniej trzech sateli-
toacutew i w trzech wymiarach przy od-
biorze sygnałoacutew od minimum czte-
rech satelitoacutew
W celu zwiększenia dokładności
wyznaczanych parametroacutew pozycji
stosuje się techniki roacuteżnicowe (ang
differential i stąd DGPS DGNSS)
Polegają one na wyznaczeniu
poprawek do zmierzonych
odległości satelitarnych na podsta-wie odległości wyliczonych teore-
tycznie w stacjach referencyjnych o
znanej pozycji Poprawki będące
roacuteżnicami pomiędzy wartościami
zmierzonymi (pseudoodległościami)
a teoretycznymi są następnie
przesyłane publicznym naziemnym
Dokładnie wysokość dodawana jest w kierunku prostopadłym do
stycznej do powierzchni elipsoidy
Akademickie Aktualności Morskie nr 2-3 (38-39) 2004 22
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
łączem radiowym (radiolatarnie
IALA) lub łączem satelitarnym
(satelity geostacjonarne WAAS
EGNOS lub MSAS) do odbiornika
użytkownika (oproacutecz łączy
publicznych dostępne są też łącza
płatne ndash komercyjne) Większość
wspoacutełczesnych odbiornikoacutew
nawigacyjnych DGPS konstru-
owana jest jako jednostki zinte-
growane ndash we wspoacutelnej obudowie
znajduje się odbiornik GPS i antena
GPSWAAS i pośredniofalowa
łącza IALA
2 Wektor prędkości
Wektor prędkości (prędkość i jejkierunek) w odbiorniku GNSS
wyznaczany jest na podstawie reje-
strowanych zmian pozycji w czasie
Na okres za jaki wyznaczany jest
ten wektor operator ma przeważnie
wpływ dzięki ustawieniu stałej filtru
cyfrowego wygładzającego odchyłki
wynikoacutew od średniej W praktyce
należy uwzględnić to że
ndash większa wartość stałej czasowej
filtru (ang filter constant ) po-
woduje opoacuteźnienie zmiany kie-runku i wartości prędkości w
stosunku do rzeczywistości ale
ostateczne parametry są obar-
czone mniejszym błędem (wy-
eliminowane są chwilowe od-
chyłki prędkości)
ndash dynamika ruchu anteny umiesz-
czonej na maszcie może być na
tyle duża (przemieszczenie w
bardzo kroacutetkim odstępie czasu
podczas ruchu na fali) że ko-
nieczne może być zwiększenie
stałej czasowej filtru ndash najlepiej
przetestować reakcję
odbiornika w praktyce
ndash wyznaczone zostają parametry
ruchu względem dna ndash nie
można więc z odbiornika GNSS
odczytać kursu (chyba że jest
to odbiornik dwuantenowy) ale
kąt drogi nad dnem i pręd-
kość względem dna
3 Dostępność pozycji GNSS
Zarządzający systemem GPS
Departament Obrony USA (DoD)
gwarantuje że od momentu rozpo-
częcia fazy operacyjnej systemu
(17071995 r) w każdym punkcie
globu ziemskiego o każdym czasie
powinny być widoczne minimum
cztery satelity W praktyce oznacza
to że minimum cztery satelity po-
winny znajdować się zawsze nad
płaszczyzną horyzontu anteny od-
biornika (prostopadłą do po-
wierzchni Ziemi i przechodzącą
przez podstawę anteny ndash tzw hory-
zont topocentryczny) Nie oznacza
to niestety że z tylu satelitoacutew będą mogły być odebrane sygnały gdyż
widzialność satelitoacutew może być
ograniczona np w wyniku konfigu-
racji odbiornika W praktyce celem
wyeliminowania ujemnego wpływu
przejścia sygnału przez troposferę
pomiary parametroacutew
nawigacyjnych w odbiorniku prze-
prowadza się tylko wtedy kiedy
satelita znajduje się powyżej pewnej
minimalnej wysokości topo-
centrycznej (ang elevation) wzglę-dem anteny odbiornika
Oz
R z
htminP S
Powierzchnia Ziemi
Strefa widzialności satelity
Roacutewnik
Płaszczyzna horyzontu topocentrycznego
Rys 7 Strefa widzialności satelity S z punktu P z uwzględnieniem dolnej gra-nicznej wysokości topocentrycznej obser-
wacji htmin [J Januszewski bdquoSystemy sate-litarnerdquo WSM Gdynia 2002]
Rysunek 7 przedstawia strefę
widzialności satelity ograniczoną
dodatkowo kątem htmin (ang eleva-
tion mask ) Widzialność satelity
może być także dodatkowo ograni-
czona przeszkodami lądowymi
tłumiącymi bądź odbijającymi sy-
gnał (las goacutery budynki przy jezio-
rach i torach wodnych) oraz znaj-
dującymi się na statku (maszt
osprzęt zasłaniający antenę) W
odbiorniku GPS zawsze mamy
możliwość podglądu konstelacji
satelitarnej (rys 8) W środku pre-
zentowanego wykresu położony jest
zenit (ht = 90ordm) a zewnętrzny okrąg
odpowiada płaszczyźnie horyzontu
topocentrycznego (ht = 0ordm) Numery
satelitoacutew z ktoacuterych sygnałoacutew ko-
rzysta odbiornik wyroacuteżnione są
czarnym tłem Azymuty odczytu-
jemy zgodnie z oznaczeniami stron
świata od środka zobrazowania nazewnątrz
N
W E
S
04
23
16
25
29
14
27 13
30
09
05
Rys 8 Prezentacja rozmieszczenia sate-litoacutew nad horyzontem topocentrycznym wodbiorniku GPS
W rzeczywistości płaszczyzną
horyzontu topocentrycznego anteny
będzie jej podstawa (dla większości
konstruowanych anten) Sygnały
dochodzące z kierunkoacutew poniżej
podstawy są celowo eliminowane
aby np zredukować błądwielotorowości sygnału Dlatego z
dostępnością sygnału GNSS mogą
wystąpić szczegoacutelne problemy przy
ruchu w dużym przechyle lub spo-
rym falowaniu
nr 2-3 (38-39) 2004 Akademickie Aktualności Morskie 23
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
4 Dokładność pozycji GNSS
GPS z wyłączonym od maja
2000 r selektywnym dostępem
(ang SA ndash selective availability)
pozwala na wyznaczanie pozycji bez korekty roacuteżnicowej z dokład-
nością około 20 m przy poziomie
ufności 095 ndash 098 Z korektą roacuteż-
nicową dokładność ta może wzro-
snąć nawet do 1 m Jest to tzw do-
kładność absolutna systemu (ang
absolute accuracy) czyli wyzna-
czona względem teoretycznej ndash
rzeczywistej wartości pozycji w
danym układzie odniesienia (ang
reference datum) Oproacutecz niej
każdy odbiornik cechuje też do-kładność względna (ang relativeaccuracy) charakteryzująca wier-
ność powrotu do wcześniejszej po-
zycji i opisywana zwykle miarą
poziomego odchylenia standardo-
wego
Należy pamiętać iż w praktyce
dokładność względna jest zawszelepsza od absolutnej
5 Czynniki wpływające nadokładność pozycji GNSSpoza kontrolą użytkownika
Jest kilka czynnikoacutew wpływają-
cych na dokładność pozycji uzy-
skanej z systemu GNSS na ktoacutere
użytkownik nie ma wpływu Wy-
mieniam je poniżej w kolejności od
najbardziej do najmniej znaczących
1 Geometria konstelacjisatelitarnej (rys 9)
Na doboacuter satelitoacutew można wpły-
nąć jedynie pośrednio w wyniku
zmiany minimalnej wysokości to-
pocentrycznej (wpływ na liczbę
widzianych satelitoacutew) oraz mak-
symalnej wartości wspoacutełczynnika
jakości geometrycznej pozycji
(HDOP) Nie możemy jednak
zmienić ruchu satelitoacutew po orbicie
Ogoacutelnie im z większej liczby sate-
litoacutew może odbiornik wyznaczyć
pozycję tym niższy DOP i dlatego
nie powinno się celowo blokować
odbioru niektoacuterych satelitoacutew
Rys 9 Wpływ geometrii wybranych przezodbiornik satelitoacutew na wartość HDOP
(ang horizontal dilution of precision)
2 Struktura atmosferyCzas przejścia sygnału uzależ-
niony jest od miejscowej gęstości
jonosfery Parametry jonosfery i
troposfery wpływają na zmierzoną
odległość ndash im satelity są bliżej
płaszczyzny horyzontu tym błąd
pomiaru jest większy i dlatego nie
powinno się zmniejszać minimalnej
wysokości topocentrycznej poniżej
5 nawet kosztem DOP
3 Wielotorowość sygnałoacutew
satelitarnych (rys 10)
Sygnały mogą docierać do od-
biornika nie bezpośrednio najkroacutet-
szą drogą ale w wyniku odbić (ang
multipath)
Rys 10 Wielotorowość sygnału satelitar-nego GNSS
4 Błędy satelitarnych wzorcoacutew
czasu (zegaroacutew atomowych) i
parametroacutew położenia satelitoacutew
(ang ephemeris)
5 Dokładność synchronizacji koduw odbiorniku GNSS (rys 11)
Synchronizacja podczas pomiaru
kodowego odbywa się w obrębie
czasu trwania ułamka 1 bitu Stąd
przykładowo dla synchronizacji z
tolerancją 1s błąd pomiaru odle-
głości moacutegłby wynieść nawet
300 m W odbiornikach nawigacyj-
nych wartość ta nie powinna prze-
kraczać 1 ndash 3 metroacutew
Akademickie Aktualności Morskie nr 2-3 (38-39) 2004 24
Rys 11 Synchronizacja kodu w odbiorniku GNSS odbywa się w obrębie czasu trwania
ułamka 1 bitu
0 0 1 0 1 0 0 0
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
W przypadku pozycji DGNSS
błędy wynikające z przejścia sy-
gnału przez atmosferę i błędy zega-
roacutew są w znaczącym stopniu redu-
kowane Powinno uwzględniać się
jednak wiek poprawki roacuteżnicowej
(ang AOC ndash age of correction)
i związaną z nim konieczność eks-
trapolacji poprawki wynikającej z
a) szybkości wyliczania po-
prawek w stacji referen-
cyjnej
b) szybkości wysyłania popra-
wek roacuteżnicowych ze stacji
referencyjnej (ang
transmission rate)
c) typu wiadomości roacuteżnico-wej
6 Czynniki wpływające na do-kładność pozycji GNSS za-leżne od użytkownika
Przy zakupie i użytkowaniu od-
biornika GNSS powinniśmy zwroacute-
cić uwagę na następujące aspekty
1 Rodzaj odbiornika GNSS
Przy wyborze odbiornika warto
zwroacutecić uwagę na jego specyfikacjętechniczną i zaimplementowane
funkcje nawigacyjne (np lokso-
dromiczne planowanie trasy) Może
się okazać że w tej samej cenie
otrzymamy lepszy sprzęt Ogoacutelnie
im więcej satelitoacutew może
jednocześnie śledzić odbiornik tym
lepiej (decyduje o tym liczba
kanałoacutew odbiorczych ndash ang chan-nel ) Aktualnie standardem stają się
odbiorniki 8 ndash 12-kanałowe dla
ktoacuterych dokładność wyznaczonej
pozycji autonomicznej GPS może
być zbliżona do dokładności czte-
rokanałowego odbiornika DGPS
wcześniejszej generacji Nie ogra-
niczając się zasięgiem stacji refe-
rencyjnej dokładności około kilku
metroacutew można uzyskać zakupując
odbiornik DGPS WAASEGNOS
2 Doboacuter układu odniesienia
Standardowo odbiorniki wy-
świetlają pozycję według WGS 84
Datum Przed naniesieniem tej po-
zycji na mapę należy zweryfikować
według jakiego układu odniesienia
zbudowana jest mapa (rys 12) i
ewentualnie wprowadzić do
odbiornika poprawkę zgodnie z
notką (rys 13) albo właściwy układ
odniesienia Odczytując poprawkę z
mapy warto sprawdzić na ile
znaczący byłby błąd jej nie-
uwzględnienia w skali mapy (często
będzie to grubość ołoacutewka)
Rys 12 Informacja zamieszczona pod ty-
tułem mapy angielskiej odnośnie układuodniesienia
Rys 13 Nota informująca o poprawkachdo pozycji satelitarnych
3 Miejsce zamontowania anteny
Trzeba tu uwzględnić kompromis
możliwości technicznych
przesłonięć anteny i narażenia jej na
uszkodzenia (warto także zwroacutecić
uwagę na standard wodoszczelności
sprzętu)
4 Konfiguracja odbiornika
GNSS
Maksymalna wartość DOP po-
winna być ustalona w granicach 8-10 Dla potrzeb nawigacji morskiej
najlepiej wybrać wyliczanie pozycji
w dwoacutech wymiarach (2D)
wprowadzając wysokość anteny
nad poziomem morza
5 Konfiguracja odbiornika
DGNSS
Aby otrzymać pozycję popra-
wioną roacuteżnicowo należy prawi-
dłowo wprowadzić do odbiornika
dane łącza radiowego ze stacją re-
ferencyjną lub wybrać opcję
WAAS W odbiornikach pracują-
cych na łączu IALA zazwyczaj
trzeba będzie wprowadzić często-
tliwość (ang frequency) i szybkość
transmisji (ang tx rate) stacji refe-
rencyjnej obejmującej nas swoim
zasięgiem Informacje te można
znaleźć w wydawnictwach Admira-
licji Brytyjskiej w 2 tomie Admi-
ralty List of Radiosignals lub w
dotyczącym naszego rejonu pływa-
nia tomie Admiralty Maritime
Communications for the Yachts-
man Dla użytkownikoacutew z dostępem
do internetu IALA zamieszcza także
wykaz stacji referencyjnych na
stronie httpwwwiala-
aismorgwebindexhtmlNajbardziej kluczowe znacze-
nie w każdej sytuacji ma jed-
nakże umiejętność weryfikacjirodzaju pozycji zliczonej obser-wowanej GNSS obserwowanejDGNSS Pomylenie pozycji ob-
serwowanej ze zliczoną lub nieak-
tualną doprowadziło już do wielu
awarii morskich Nie można więc
nigdy mieć bezgranicznego zaufania
do mapy elektronicznej pre-
zentującej pozycję statku z GNSS
Podsumowanie
Aktualne rozwiązania technolo-
giczne nawigacyjnych odbiornikoacutew
GPSGNSS pozwalają na osiągnię-
cie kilkumetrowych dokładności
pozycji Aby jednak były to pozycje
wiarygodne każdy użytkownik
powinien na wstępie zapoznać się z
instrukcją techniczną i obsługi
swojego odbiornika oraz uwzględ-
nić przedstawione czynniki wpły-
wające na dostępność i dokładność
pozycji GNSS Biorąc pod uwagę
specyfikę budowy i ruchu statku lub
jachtu może to mieć istotne
znaczenie szczegoacutelnie w nie-
sprzyjających warunkach pogodo-
wych i na akwenach ograniczonych
Paweł Zalewski
nr 2-3 (38-39) 2004 Akademickie Aktualności Morskie 25
SATELLITE-DERIVED POSITIONSPositions derived from satellite navigationsystems are normally referred to WGSDatum the latitudes of such positions can be plotted directly on this chart but longitudesshould be moved 01 minutes EASTWARDto agree with this chart
Positions are referred to Ordnance Survey of Great Britain (1936) Datum (see SATELLITE -DERIVED POSITIONS note)
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
łączem radiowym (radiolatarnie
IALA) lub łączem satelitarnym
(satelity geostacjonarne WAAS
EGNOS lub MSAS) do odbiornika
użytkownika (oproacutecz łączy
publicznych dostępne są też łącza
płatne ndash komercyjne) Większość
wspoacutełczesnych odbiornikoacutew
nawigacyjnych DGPS konstru-
owana jest jako jednostki zinte-
growane ndash we wspoacutelnej obudowie
znajduje się odbiornik GPS i antena
GPSWAAS i pośredniofalowa
łącza IALA
2 Wektor prędkości
Wektor prędkości (prędkość i jejkierunek) w odbiorniku GNSS
wyznaczany jest na podstawie reje-
strowanych zmian pozycji w czasie
Na okres za jaki wyznaczany jest
ten wektor operator ma przeważnie
wpływ dzięki ustawieniu stałej filtru
cyfrowego wygładzającego odchyłki
wynikoacutew od średniej W praktyce
należy uwzględnić to że
ndash większa wartość stałej czasowej
filtru (ang filter constant ) po-
woduje opoacuteźnienie zmiany kie-runku i wartości prędkości w
stosunku do rzeczywistości ale
ostateczne parametry są obar-
czone mniejszym błędem (wy-
eliminowane są chwilowe od-
chyłki prędkości)
ndash dynamika ruchu anteny umiesz-
czonej na maszcie może być na
tyle duża (przemieszczenie w
bardzo kroacutetkim odstępie czasu
podczas ruchu na fali) że ko-
nieczne może być zwiększenie
stałej czasowej filtru ndash najlepiej
przetestować reakcję
odbiornika w praktyce
ndash wyznaczone zostają parametry
ruchu względem dna ndash nie
można więc z odbiornika GNSS
odczytać kursu (chyba że jest
to odbiornik dwuantenowy) ale
kąt drogi nad dnem i pręd-
kość względem dna
3 Dostępność pozycji GNSS
Zarządzający systemem GPS
Departament Obrony USA (DoD)
gwarantuje że od momentu rozpo-
częcia fazy operacyjnej systemu
(17071995 r) w każdym punkcie
globu ziemskiego o każdym czasie
powinny być widoczne minimum
cztery satelity W praktyce oznacza
to że minimum cztery satelity po-
winny znajdować się zawsze nad
płaszczyzną horyzontu anteny od-
biornika (prostopadłą do po-
wierzchni Ziemi i przechodzącą
przez podstawę anteny ndash tzw hory-
zont topocentryczny) Nie oznacza
to niestety że z tylu satelitoacutew będą mogły być odebrane sygnały gdyż
widzialność satelitoacutew może być
ograniczona np w wyniku konfigu-
racji odbiornika W praktyce celem
wyeliminowania ujemnego wpływu
przejścia sygnału przez troposferę
pomiary parametroacutew
nawigacyjnych w odbiorniku prze-
prowadza się tylko wtedy kiedy
satelita znajduje się powyżej pewnej
minimalnej wysokości topo-
centrycznej (ang elevation) wzglę-dem anteny odbiornika
Oz
R z
htminP S
Powierzchnia Ziemi
Strefa widzialności satelity
Roacutewnik
Płaszczyzna horyzontu topocentrycznego
Rys 7 Strefa widzialności satelity S z punktu P z uwzględnieniem dolnej gra-nicznej wysokości topocentrycznej obser-
wacji htmin [J Januszewski bdquoSystemy sate-litarnerdquo WSM Gdynia 2002]
Rysunek 7 przedstawia strefę
widzialności satelity ograniczoną
dodatkowo kątem htmin (ang eleva-
tion mask ) Widzialność satelity
może być także dodatkowo ograni-
czona przeszkodami lądowymi
tłumiącymi bądź odbijającymi sy-
gnał (las goacutery budynki przy jezio-
rach i torach wodnych) oraz znaj-
dującymi się na statku (maszt
osprzęt zasłaniający antenę) W
odbiorniku GPS zawsze mamy
możliwość podglądu konstelacji
satelitarnej (rys 8) W środku pre-
zentowanego wykresu położony jest
zenit (ht = 90ordm) a zewnętrzny okrąg
odpowiada płaszczyźnie horyzontu
topocentrycznego (ht = 0ordm) Numery
satelitoacutew z ktoacuterych sygnałoacutew ko-
rzysta odbiornik wyroacuteżnione są
czarnym tłem Azymuty odczytu-
jemy zgodnie z oznaczeniami stron
świata od środka zobrazowania nazewnątrz
N
W E
S
04
23
16
25
29
14
27 13
30
09
05
Rys 8 Prezentacja rozmieszczenia sate-litoacutew nad horyzontem topocentrycznym wodbiorniku GPS
W rzeczywistości płaszczyzną
horyzontu topocentrycznego anteny
będzie jej podstawa (dla większości
konstruowanych anten) Sygnały
dochodzące z kierunkoacutew poniżej
podstawy są celowo eliminowane
aby np zredukować błądwielotorowości sygnału Dlatego z
dostępnością sygnału GNSS mogą
wystąpić szczegoacutelne problemy przy
ruchu w dużym przechyle lub spo-
rym falowaniu
nr 2-3 (38-39) 2004 Akademickie Aktualności Morskie 23
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
4 Dokładność pozycji GNSS
GPS z wyłączonym od maja
2000 r selektywnym dostępem
(ang SA ndash selective availability)
pozwala na wyznaczanie pozycji bez korekty roacuteżnicowej z dokład-
nością około 20 m przy poziomie
ufności 095 ndash 098 Z korektą roacuteż-
nicową dokładność ta może wzro-
snąć nawet do 1 m Jest to tzw do-
kładność absolutna systemu (ang
absolute accuracy) czyli wyzna-
czona względem teoretycznej ndash
rzeczywistej wartości pozycji w
danym układzie odniesienia (ang
reference datum) Oproacutecz niej
każdy odbiornik cechuje też do-kładność względna (ang relativeaccuracy) charakteryzująca wier-
ność powrotu do wcześniejszej po-
zycji i opisywana zwykle miarą
poziomego odchylenia standardo-
wego
Należy pamiętać iż w praktyce
dokładność względna jest zawszelepsza od absolutnej
5 Czynniki wpływające nadokładność pozycji GNSSpoza kontrolą użytkownika
Jest kilka czynnikoacutew wpływają-
cych na dokładność pozycji uzy-
skanej z systemu GNSS na ktoacutere
użytkownik nie ma wpływu Wy-
mieniam je poniżej w kolejności od
najbardziej do najmniej znaczących
1 Geometria konstelacjisatelitarnej (rys 9)
Na doboacuter satelitoacutew można wpły-
nąć jedynie pośrednio w wyniku
zmiany minimalnej wysokości to-
pocentrycznej (wpływ na liczbę
widzianych satelitoacutew) oraz mak-
symalnej wartości wspoacutełczynnika
jakości geometrycznej pozycji
(HDOP) Nie możemy jednak
zmienić ruchu satelitoacutew po orbicie
Ogoacutelnie im z większej liczby sate-
litoacutew może odbiornik wyznaczyć
pozycję tym niższy DOP i dlatego
nie powinno się celowo blokować
odbioru niektoacuterych satelitoacutew
Rys 9 Wpływ geometrii wybranych przezodbiornik satelitoacutew na wartość HDOP
(ang horizontal dilution of precision)
2 Struktura atmosferyCzas przejścia sygnału uzależ-
niony jest od miejscowej gęstości
jonosfery Parametry jonosfery i
troposfery wpływają na zmierzoną
odległość ndash im satelity są bliżej
płaszczyzny horyzontu tym błąd
pomiaru jest większy i dlatego nie
powinno się zmniejszać minimalnej
wysokości topocentrycznej poniżej
5 nawet kosztem DOP
3 Wielotorowość sygnałoacutew
satelitarnych (rys 10)
Sygnały mogą docierać do od-
biornika nie bezpośrednio najkroacutet-
szą drogą ale w wyniku odbić (ang
multipath)
Rys 10 Wielotorowość sygnału satelitar-nego GNSS
4 Błędy satelitarnych wzorcoacutew
czasu (zegaroacutew atomowych) i
parametroacutew położenia satelitoacutew
(ang ephemeris)
5 Dokładność synchronizacji koduw odbiorniku GNSS (rys 11)
Synchronizacja podczas pomiaru
kodowego odbywa się w obrębie
czasu trwania ułamka 1 bitu Stąd
przykładowo dla synchronizacji z
tolerancją 1s błąd pomiaru odle-
głości moacutegłby wynieść nawet
300 m W odbiornikach nawigacyj-
nych wartość ta nie powinna prze-
kraczać 1 ndash 3 metroacutew
Akademickie Aktualności Morskie nr 2-3 (38-39) 2004 24
Rys 11 Synchronizacja kodu w odbiorniku GNSS odbywa się w obrębie czasu trwania
ułamka 1 bitu
0 0 1 0 1 0 0 0
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
W przypadku pozycji DGNSS
błędy wynikające z przejścia sy-
gnału przez atmosferę i błędy zega-
roacutew są w znaczącym stopniu redu-
kowane Powinno uwzględniać się
jednak wiek poprawki roacuteżnicowej
(ang AOC ndash age of correction)
i związaną z nim konieczność eks-
trapolacji poprawki wynikającej z
a) szybkości wyliczania po-
prawek w stacji referen-
cyjnej
b) szybkości wysyłania popra-
wek roacuteżnicowych ze stacji
referencyjnej (ang
transmission rate)
c) typu wiadomości roacuteżnico-wej
6 Czynniki wpływające na do-kładność pozycji GNSS za-leżne od użytkownika
Przy zakupie i użytkowaniu od-
biornika GNSS powinniśmy zwroacute-
cić uwagę na następujące aspekty
1 Rodzaj odbiornika GNSS
Przy wyborze odbiornika warto
zwroacutecić uwagę na jego specyfikacjętechniczną i zaimplementowane
funkcje nawigacyjne (np lokso-
dromiczne planowanie trasy) Może
się okazać że w tej samej cenie
otrzymamy lepszy sprzęt Ogoacutelnie
im więcej satelitoacutew może
jednocześnie śledzić odbiornik tym
lepiej (decyduje o tym liczba
kanałoacutew odbiorczych ndash ang chan-nel ) Aktualnie standardem stają się
odbiorniki 8 ndash 12-kanałowe dla
ktoacuterych dokładność wyznaczonej
pozycji autonomicznej GPS może
być zbliżona do dokładności czte-
rokanałowego odbiornika DGPS
wcześniejszej generacji Nie ogra-
niczając się zasięgiem stacji refe-
rencyjnej dokładności około kilku
metroacutew można uzyskać zakupując
odbiornik DGPS WAASEGNOS
2 Doboacuter układu odniesienia
Standardowo odbiorniki wy-
świetlają pozycję według WGS 84
Datum Przed naniesieniem tej po-
zycji na mapę należy zweryfikować
według jakiego układu odniesienia
zbudowana jest mapa (rys 12) i
ewentualnie wprowadzić do
odbiornika poprawkę zgodnie z
notką (rys 13) albo właściwy układ
odniesienia Odczytując poprawkę z
mapy warto sprawdzić na ile
znaczący byłby błąd jej nie-
uwzględnienia w skali mapy (często
będzie to grubość ołoacutewka)
Rys 12 Informacja zamieszczona pod ty-
tułem mapy angielskiej odnośnie układuodniesienia
Rys 13 Nota informująca o poprawkachdo pozycji satelitarnych
3 Miejsce zamontowania anteny
Trzeba tu uwzględnić kompromis
możliwości technicznych
przesłonięć anteny i narażenia jej na
uszkodzenia (warto także zwroacutecić
uwagę na standard wodoszczelności
sprzętu)
4 Konfiguracja odbiornika
GNSS
Maksymalna wartość DOP po-
winna być ustalona w granicach 8-10 Dla potrzeb nawigacji morskiej
najlepiej wybrać wyliczanie pozycji
w dwoacutech wymiarach (2D)
wprowadzając wysokość anteny
nad poziomem morza
5 Konfiguracja odbiornika
DGNSS
Aby otrzymać pozycję popra-
wioną roacuteżnicowo należy prawi-
dłowo wprowadzić do odbiornika
dane łącza radiowego ze stacją re-
ferencyjną lub wybrać opcję
WAAS W odbiornikach pracują-
cych na łączu IALA zazwyczaj
trzeba będzie wprowadzić często-
tliwość (ang frequency) i szybkość
transmisji (ang tx rate) stacji refe-
rencyjnej obejmującej nas swoim
zasięgiem Informacje te można
znaleźć w wydawnictwach Admira-
licji Brytyjskiej w 2 tomie Admi-
ralty List of Radiosignals lub w
dotyczącym naszego rejonu pływa-
nia tomie Admiralty Maritime
Communications for the Yachts-
man Dla użytkownikoacutew z dostępem
do internetu IALA zamieszcza także
wykaz stacji referencyjnych na
stronie httpwwwiala-
aismorgwebindexhtmlNajbardziej kluczowe znacze-
nie w każdej sytuacji ma jed-
nakże umiejętność weryfikacjirodzaju pozycji zliczonej obser-wowanej GNSS obserwowanejDGNSS Pomylenie pozycji ob-
serwowanej ze zliczoną lub nieak-
tualną doprowadziło już do wielu
awarii morskich Nie można więc
nigdy mieć bezgranicznego zaufania
do mapy elektronicznej pre-
zentującej pozycję statku z GNSS
Podsumowanie
Aktualne rozwiązania technolo-
giczne nawigacyjnych odbiornikoacutew
GPSGNSS pozwalają na osiągnię-
cie kilkumetrowych dokładności
pozycji Aby jednak były to pozycje
wiarygodne każdy użytkownik
powinien na wstępie zapoznać się z
instrukcją techniczną i obsługi
swojego odbiornika oraz uwzględ-
nić przedstawione czynniki wpły-
wające na dostępność i dokładność
pozycji GNSS Biorąc pod uwagę
specyfikę budowy i ruchu statku lub
jachtu może to mieć istotne
znaczenie szczegoacutelnie w nie-
sprzyjających warunkach pogodo-
wych i na akwenach ograniczonych
Paweł Zalewski
nr 2-3 (38-39) 2004 Akademickie Aktualności Morskie 25
SATELLITE-DERIVED POSITIONSPositions derived from satellite navigationsystems are normally referred to WGSDatum the latitudes of such positions can be plotted directly on this chart but longitudesshould be moved 01 minutes EASTWARDto agree with this chart
Positions are referred to Ordnance Survey of Great Britain (1936) Datum (see SATELLITE -DERIVED POSITIONS note)
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
4 Dokładność pozycji GNSS
GPS z wyłączonym od maja
2000 r selektywnym dostępem
(ang SA ndash selective availability)
pozwala na wyznaczanie pozycji bez korekty roacuteżnicowej z dokład-
nością około 20 m przy poziomie
ufności 095 ndash 098 Z korektą roacuteż-
nicową dokładność ta może wzro-
snąć nawet do 1 m Jest to tzw do-
kładność absolutna systemu (ang
absolute accuracy) czyli wyzna-
czona względem teoretycznej ndash
rzeczywistej wartości pozycji w
danym układzie odniesienia (ang
reference datum) Oproacutecz niej
każdy odbiornik cechuje też do-kładność względna (ang relativeaccuracy) charakteryzująca wier-
ność powrotu do wcześniejszej po-
zycji i opisywana zwykle miarą
poziomego odchylenia standardo-
wego
Należy pamiętać iż w praktyce
dokładność względna jest zawszelepsza od absolutnej
5 Czynniki wpływające nadokładność pozycji GNSSpoza kontrolą użytkownika
Jest kilka czynnikoacutew wpływają-
cych na dokładność pozycji uzy-
skanej z systemu GNSS na ktoacutere
użytkownik nie ma wpływu Wy-
mieniam je poniżej w kolejności od
najbardziej do najmniej znaczących
1 Geometria konstelacjisatelitarnej (rys 9)
Na doboacuter satelitoacutew można wpły-
nąć jedynie pośrednio w wyniku
zmiany minimalnej wysokości to-
pocentrycznej (wpływ na liczbę
widzianych satelitoacutew) oraz mak-
symalnej wartości wspoacutełczynnika
jakości geometrycznej pozycji
(HDOP) Nie możemy jednak
zmienić ruchu satelitoacutew po orbicie
Ogoacutelnie im z większej liczby sate-
litoacutew może odbiornik wyznaczyć
pozycję tym niższy DOP i dlatego
nie powinno się celowo blokować
odbioru niektoacuterych satelitoacutew
Rys 9 Wpływ geometrii wybranych przezodbiornik satelitoacutew na wartość HDOP
(ang horizontal dilution of precision)
2 Struktura atmosferyCzas przejścia sygnału uzależ-
niony jest od miejscowej gęstości
jonosfery Parametry jonosfery i
troposfery wpływają na zmierzoną
odległość ndash im satelity są bliżej
płaszczyzny horyzontu tym błąd
pomiaru jest większy i dlatego nie
powinno się zmniejszać minimalnej
wysokości topocentrycznej poniżej
5 nawet kosztem DOP
3 Wielotorowość sygnałoacutew
satelitarnych (rys 10)
Sygnały mogą docierać do od-
biornika nie bezpośrednio najkroacutet-
szą drogą ale w wyniku odbić (ang
multipath)
Rys 10 Wielotorowość sygnału satelitar-nego GNSS
4 Błędy satelitarnych wzorcoacutew
czasu (zegaroacutew atomowych) i
parametroacutew położenia satelitoacutew
(ang ephemeris)
5 Dokładność synchronizacji koduw odbiorniku GNSS (rys 11)
Synchronizacja podczas pomiaru
kodowego odbywa się w obrębie
czasu trwania ułamka 1 bitu Stąd
przykładowo dla synchronizacji z
tolerancją 1s błąd pomiaru odle-
głości moacutegłby wynieść nawet
300 m W odbiornikach nawigacyj-
nych wartość ta nie powinna prze-
kraczać 1 ndash 3 metroacutew
Akademickie Aktualności Morskie nr 2-3 (38-39) 2004 24
Rys 11 Synchronizacja kodu w odbiorniku GNSS odbywa się w obrębie czasu trwania
ułamka 1 bitu
0 0 1 0 1 0 0 0
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
W przypadku pozycji DGNSS
błędy wynikające z przejścia sy-
gnału przez atmosferę i błędy zega-
roacutew są w znaczącym stopniu redu-
kowane Powinno uwzględniać się
jednak wiek poprawki roacuteżnicowej
(ang AOC ndash age of correction)
i związaną z nim konieczność eks-
trapolacji poprawki wynikającej z
a) szybkości wyliczania po-
prawek w stacji referen-
cyjnej
b) szybkości wysyłania popra-
wek roacuteżnicowych ze stacji
referencyjnej (ang
transmission rate)
c) typu wiadomości roacuteżnico-wej
6 Czynniki wpływające na do-kładność pozycji GNSS za-leżne od użytkownika
Przy zakupie i użytkowaniu od-
biornika GNSS powinniśmy zwroacute-
cić uwagę na następujące aspekty
1 Rodzaj odbiornika GNSS
Przy wyborze odbiornika warto
zwroacutecić uwagę na jego specyfikacjętechniczną i zaimplementowane
funkcje nawigacyjne (np lokso-
dromiczne planowanie trasy) Może
się okazać że w tej samej cenie
otrzymamy lepszy sprzęt Ogoacutelnie
im więcej satelitoacutew może
jednocześnie śledzić odbiornik tym
lepiej (decyduje o tym liczba
kanałoacutew odbiorczych ndash ang chan-nel ) Aktualnie standardem stają się
odbiorniki 8 ndash 12-kanałowe dla
ktoacuterych dokładność wyznaczonej
pozycji autonomicznej GPS może
być zbliżona do dokładności czte-
rokanałowego odbiornika DGPS
wcześniejszej generacji Nie ogra-
niczając się zasięgiem stacji refe-
rencyjnej dokładności około kilku
metroacutew można uzyskać zakupując
odbiornik DGPS WAASEGNOS
2 Doboacuter układu odniesienia
Standardowo odbiorniki wy-
świetlają pozycję według WGS 84
Datum Przed naniesieniem tej po-
zycji na mapę należy zweryfikować
według jakiego układu odniesienia
zbudowana jest mapa (rys 12) i
ewentualnie wprowadzić do
odbiornika poprawkę zgodnie z
notką (rys 13) albo właściwy układ
odniesienia Odczytując poprawkę z
mapy warto sprawdzić na ile
znaczący byłby błąd jej nie-
uwzględnienia w skali mapy (często
będzie to grubość ołoacutewka)
Rys 12 Informacja zamieszczona pod ty-
tułem mapy angielskiej odnośnie układuodniesienia
Rys 13 Nota informująca o poprawkachdo pozycji satelitarnych
3 Miejsce zamontowania anteny
Trzeba tu uwzględnić kompromis
możliwości technicznych
przesłonięć anteny i narażenia jej na
uszkodzenia (warto także zwroacutecić
uwagę na standard wodoszczelności
sprzętu)
4 Konfiguracja odbiornika
GNSS
Maksymalna wartość DOP po-
winna być ustalona w granicach 8-10 Dla potrzeb nawigacji morskiej
najlepiej wybrać wyliczanie pozycji
w dwoacutech wymiarach (2D)
wprowadzając wysokość anteny
nad poziomem morza
5 Konfiguracja odbiornika
DGNSS
Aby otrzymać pozycję popra-
wioną roacuteżnicowo należy prawi-
dłowo wprowadzić do odbiornika
dane łącza radiowego ze stacją re-
ferencyjną lub wybrać opcję
WAAS W odbiornikach pracują-
cych na łączu IALA zazwyczaj
trzeba będzie wprowadzić często-
tliwość (ang frequency) i szybkość
transmisji (ang tx rate) stacji refe-
rencyjnej obejmującej nas swoim
zasięgiem Informacje te można
znaleźć w wydawnictwach Admira-
licji Brytyjskiej w 2 tomie Admi-
ralty List of Radiosignals lub w
dotyczącym naszego rejonu pływa-
nia tomie Admiralty Maritime
Communications for the Yachts-
man Dla użytkownikoacutew z dostępem
do internetu IALA zamieszcza także
wykaz stacji referencyjnych na
stronie httpwwwiala-
aismorgwebindexhtmlNajbardziej kluczowe znacze-
nie w każdej sytuacji ma jed-
nakże umiejętność weryfikacjirodzaju pozycji zliczonej obser-wowanej GNSS obserwowanejDGNSS Pomylenie pozycji ob-
serwowanej ze zliczoną lub nieak-
tualną doprowadziło już do wielu
awarii morskich Nie można więc
nigdy mieć bezgranicznego zaufania
do mapy elektronicznej pre-
zentującej pozycję statku z GNSS
Podsumowanie
Aktualne rozwiązania technolo-
giczne nawigacyjnych odbiornikoacutew
GPSGNSS pozwalają na osiągnię-
cie kilkumetrowych dokładności
pozycji Aby jednak były to pozycje
wiarygodne każdy użytkownik
powinien na wstępie zapoznać się z
instrukcją techniczną i obsługi
swojego odbiornika oraz uwzględ-
nić przedstawione czynniki wpły-
wające na dostępność i dokładność
pozycji GNSS Biorąc pod uwagę
specyfikę budowy i ruchu statku lub
jachtu może to mieć istotne
znaczenie szczegoacutelnie w nie-
sprzyjających warunkach pogodo-
wych i na akwenach ograniczonych
Paweł Zalewski
nr 2-3 (38-39) 2004 Akademickie Aktualności Morskie 25
SATELLITE-DERIVED POSITIONSPositions derived from satellite navigationsystems are normally referred to WGSDatum the latitudes of such positions can be plotted directly on this chart but longitudesshould be moved 01 minutes EASTWARDto agree with this chart
Positions are referred to Ordnance Survey of Great Britain (1936) Datum (see SATELLITE -DERIVED POSITIONS note)
5122018 Jako i dost pno parametr w nawigacyjnych GNSS - slidepdfcom
httpslidepdfcomreaderfulljakosc-i-dostepnosc-parametrow-nawigacyjnych-gnss
W przypadku pozycji DGNSS
błędy wynikające z przejścia sy-
gnału przez atmosferę i błędy zega-
roacutew są w znaczącym stopniu redu-
kowane Powinno uwzględniać się
jednak wiek poprawki roacuteżnicowej
(ang AOC ndash age of correction)
i związaną z nim konieczność eks-
trapolacji poprawki wynikającej z
a) szybkości wyliczania po-
prawek w stacji referen-
cyjnej
b) szybkości wysyłania popra-
wek roacuteżnicowych ze stacji
referencyjnej (ang
transmission rate)
c) typu wiadomości roacuteżnico-wej
6 Czynniki wpływające na do-kładność pozycji GNSS za-leżne od użytkownika
Przy zakupie i użytkowaniu od-
biornika GNSS powinniśmy zwroacute-
cić uwagę na następujące aspekty
1 Rodzaj odbiornika GNSS
Przy wyborze odbiornika warto
zwroacutecić uwagę na jego specyfikacjętechniczną i zaimplementowane
funkcje nawigacyjne (np lokso-
dromiczne planowanie trasy) Może
się okazać że w tej samej cenie
otrzymamy lepszy sprzęt Ogoacutelnie
im więcej satelitoacutew może
jednocześnie śledzić odbiornik tym
lepiej (decyduje o tym liczba
kanałoacutew odbiorczych ndash ang chan-nel ) Aktualnie standardem stają się
odbiorniki 8 ndash 12-kanałowe dla
ktoacuterych dokładność wyznaczonej
pozycji autonomicznej GPS może
być zbliżona do dokładności czte-
rokanałowego odbiornika DGPS
wcześniejszej generacji Nie ogra-
niczając się zasięgiem stacji refe-
rencyjnej dokładności około kilku
metroacutew można uzyskać zakupując
odbiornik DGPS WAASEGNOS
2 Doboacuter układu odniesienia
Standardowo odbiorniki wy-
świetlają pozycję według WGS 84
Datum Przed naniesieniem tej po-
zycji na mapę należy zweryfikować
według jakiego układu odniesienia
zbudowana jest mapa (rys 12) i
ewentualnie wprowadzić do
odbiornika poprawkę zgodnie z
notką (rys 13) albo właściwy układ
odniesienia Odczytując poprawkę z
mapy warto sprawdzić na ile
znaczący byłby błąd jej nie-
uwzględnienia w skali mapy (często
będzie to grubość ołoacutewka)
Rys 12 Informacja zamieszczona pod ty-
tułem mapy angielskiej odnośnie układuodniesienia
Rys 13 Nota informująca o poprawkachdo pozycji satelitarnych
3 Miejsce zamontowania anteny
Trzeba tu uwzględnić kompromis
możliwości technicznych
przesłonięć anteny i narażenia jej na
uszkodzenia (warto także zwroacutecić
uwagę na standard wodoszczelności
sprzętu)
4 Konfiguracja odbiornika
GNSS
Maksymalna wartość DOP po-
winna być ustalona w granicach 8-10 Dla potrzeb nawigacji morskiej
najlepiej wybrać wyliczanie pozycji
w dwoacutech wymiarach (2D)
wprowadzając wysokość anteny
nad poziomem morza
5 Konfiguracja odbiornika
DGNSS
Aby otrzymać pozycję popra-
wioną roacuteżnicowo należy prawi-
dłowo wprowadzić do odbiornika
dane łącza radiowego ze stacją re-
ferencyjną lub wybrać opcję
WAAS W odbiornikach pracują-
cych na łączu IALA zazwyczaj
trzeba będzie wprowadzić często-
tliwość (ang frequency) i szybkość
transmisji (ang tx rate) stacji refe-
rencyjnej obejmującej nas swoim
zasięgiem Informacje te można
znaleźć w wydawnictwach Admira-
licji Brytyjskiej w 2 tomie Admi-
ralty List of Radiosignals lub w
dotyczącym naszego rejonu pływa-
nia tomie Admiralty Maritime
Communications for the Yachts-
man Dla użytkownikoacutew z dostępem
do internetu IALA zamieszcza także
wykaz stacji referencyjnych na
stronie httpwwwiala-
aismorgwebindexhtmlNajbardziej kluczowe znacze-
nie w każdej sytuacji ma jed-
nakże umiejętność weryfikacjirodzaju pozycji zliczonej obser-wowanej GNSS obserwowanejDGNSS Pomylenie pozycji ob-
serwowanej ze zliczoną lub nieak-
tualną doprowadziło już do wielu
awarii morskich Nie można więc
nigdy mieć bezgranicznego zaufania
do mapy elektronicznej pre-
zentującej pozycję statku z GNSS
Podsumowanie
Aktualne rozwiązania technolo-
giczne nawigacyjnych odbiornikoacutew
GPSGNSS pozwalają na osiągnię-
cie kilkumetrowych dokładności
pozycji Aby jednak były to pozycje
wiarygodne każdy użytkownik
powinien na wstępie zapoznać się z
instrukcją techniczną i obsługi
swojego odbiornika oraz uwzględ-
nić przedstawione czynniki wpły-
wające na dostępność i dokładność
pozycji GNSS Biorąc pod uwagę
specyfikę budowy i ruchu statku lub
jachtu może to mieć istotne
znaczenie szczegoacutelnie w nie-
sprzyjających warunkach pogodo-
wych i na akwenach ograniczonych
Paweł Zalewski
nr 2-3 (38-39) 2004 Akademickie Aktualności Morskie 25
SATELLITE-DERIVED POSITIONSPositions derived from satellite navigationsystems are normally referred to WGSDatum the latitudes of such positions can be plotted directly on this chart but longitudesshould be moved 01 minutes EASTWARDto agree with this chart
Positions are referred to Ordnance Survey of Great Britain (1936) Datum (see SATELLITE -DERIVED POSITIONS note)