Embed Size (px)
Citation preview

JSIMS / ASTT Workshop14 May 1999
Command and Control Modeling for
Joint Synthetic Battlespaces
Randall W. Hill, Jr.
Jonathan GratchUSC Information Sciences Institute
JSIMS / ASTT Workshop14 May 1999
Outline
• Synthetic Forces Problem
• Hypothesis
• Command and Decision Modeling
• Supporting Technologies
• Status of Work
• Maturity of Work
• Demonstration
JSIMS / ASTT Workshop14 May 1999
Synthetic Forces Problem

JSIMS / ASTT Workshop14 May 1999
Motivation
• Need cost-effective C2 modeling– Replace / augment human controllers with automated C2 – Represent a wide range of organizations and situations
• Need realistic C2 behavior– C2 models must make believable decisions– The outcomes of C2 operations need to be credible

JSIMS / ASTT Workshop14 May 1999
Command Force Requirements
• Continuous Planning– Understand evolving situations– Achieve goals despite unplanned events
• Collaborative Planning– Understand behavior of other groups
• friendly forces and opposing forces
– Understand organizational constraints• communication, coordination, authority
JSIMS / ASTT Workshop14 May 1999
Command Force Requirements
• Intelligence (Situation Awareness)– Identify information requirements– Focus intelligence collection efforts– Model intelligence constraints on planning

JSIMS / ASTT Workshop14 May 1999
Hypotheses

JSIMS / ASTT Workshop14 May 1999
Hypotheses (1)
• Realistic C2 models require flexible group behavior
• The key to flexible behavior is handling situation interrupts– Understand the nature of the situation and adjust
behavior appropriately– Achieve goals in spite of unexpected obstacles

JSIMS / ASTT Workshop14 May 1999
Hypotheses (2)
• Flexible group behavior requires continuous planning, which interleaves– Situation awareness: understand other groups– Planning: plan for groups against groups– Execution: coordinated plan execution
• Flexible group behavior requires collaboration

JSIMS / ASTT Workshop14 May 1999
Command and Decision Modeling

JSIMS / ASTT Workshop14 May 1999
Mission Capabilities
• Army Aviation Deep Attack– Battalion command agent– Company command agents– CSS command agent– AH64 Apache Rotary Wing Aircraft

BP
FARPCSS
HA
HA
FLOT

JSIMS / ASTT Workshop14 May 1999
Soar-CFOR Planning Architecture
• Support for continuous planning– Integrates planning, execution and repair– Enhances situation awareness
• Support for collaborative planning– Reasons about plans of multiple groups– Plan sharing among entities– Explicit plan management activities
• Military Decision Making Process (MDMP)• Organizational models• Communication protocols
JSIMS / ASTT Workshop14 May 1999
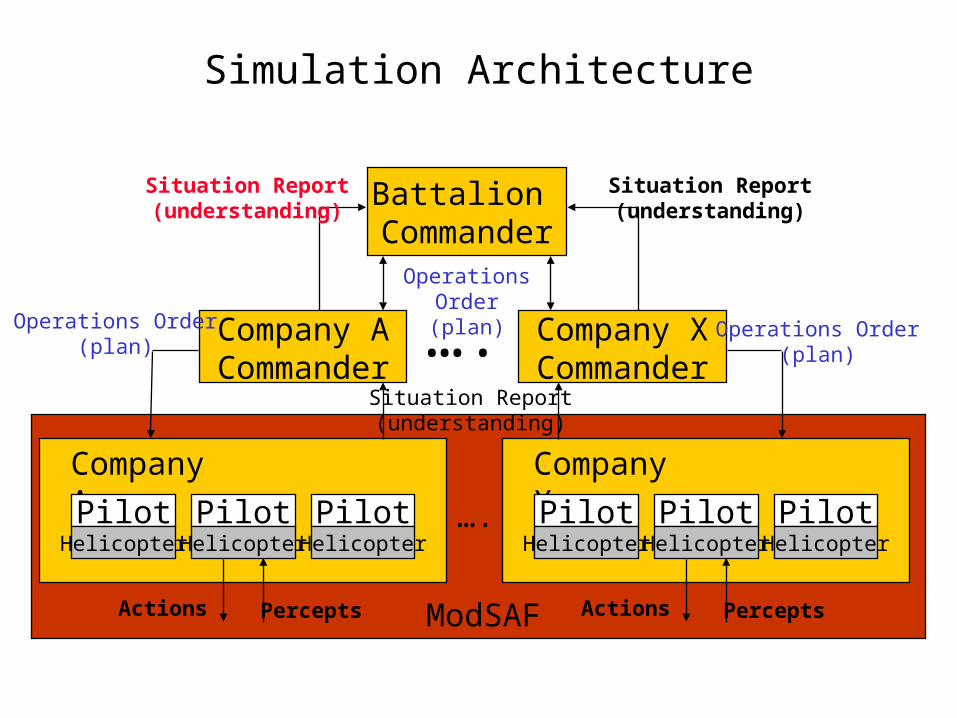
Simulation Architecture
Battalion Commander
Company ACommander
Company XCommander
Company A
PilotHelicopter
PilotHelicopter
PilotHelicopter
ModSAF
Company X
PilotHelicopter
PilotHelicopter
PilotHelicopter
….
….
Operations Order(plan)
Operations Order(plan)
Operations Order(plan)
Situation Report(understanding)
Situation Report(understanding)
Situation Report(understanding)
PerceptsActions PerceptsActions
JSIMS / ASTT Workshop14 May 1999
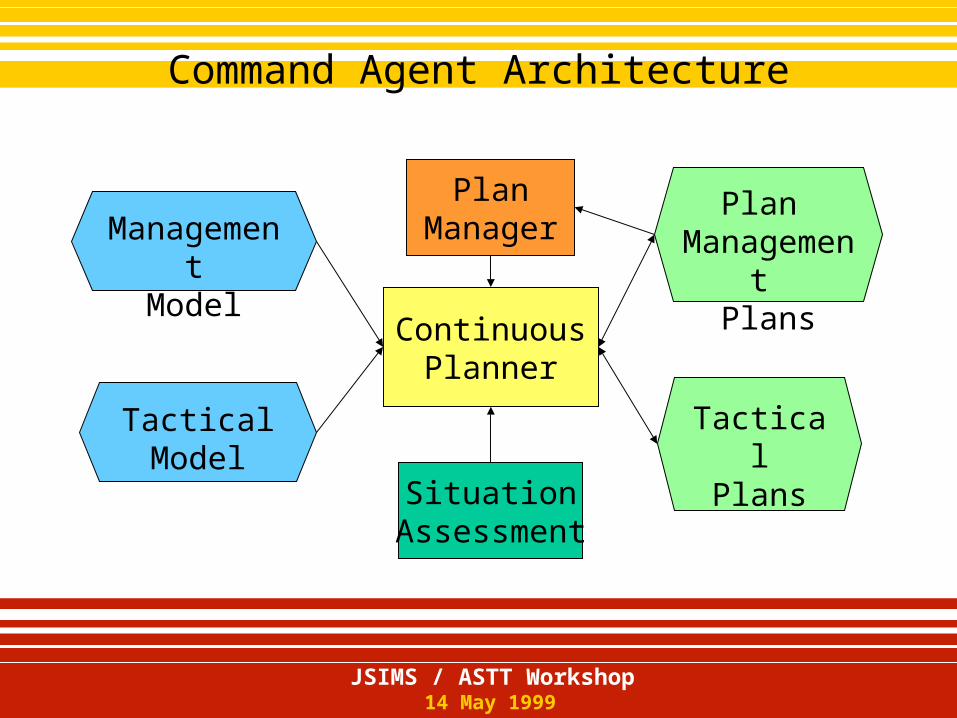
Command Agent Architecture
Plan Management
Plans
TacticalPlans
TacticalModel
ManagementModel
PlanManager
SituationAssessment
ContinuousPlanner
JSIMS / ASTT Workshop14 May 1999
Architecture
• Planner– Implements continuous planning capabilities
• Situation Assessment– Fuses sensors, reports, and expectations – generates and updates current world view
• Plan manager– Augments collaborative planning with:
• Organizational reasoning• Military decision making process
• Domain Theory– Maintains plan management and tactical knowledge
JSIMS / ASTT Workshop14 May 1999
Supporting Technologies
Continuous Planning
JSIMS / ASTT Workshop14 May 1999
Continuous Planning
• Implements basic planning functions– Generates plans– Controls execution & coordination of subordinates– Recognizes Situation Interrupts and makes repairs
• INPUT: – Domain theory (tasks, plan fragments, assets)– Mission objectives, friendly/enemy plans (from OPORDER)– Existing plans– Current situation (from Situation Awareness)

JSIMS / ASTT Workshop14 May 1999
Situation Assessment
• Hide information gathering details from Planner• Derives consolidated picture of current situation from:
– Radio reports (via 16 CCSIL message types)• OpOrders, SitReps, Status Reps, Replacement Reqs, Flight
Advisory, BDA, Request Passage Coordination, etc...
– Vehicle Sensors (via MITRE CFOR platform services)– Expectations
• expected enemy contact (derived from OpOrder)• frequency of subordinate Status Reps
• Rule-based reasoning• Can perform limited sensing actions
– e.g.. Request situation reports

JSIMS / ASTT Workshop14 May 1999
Situation Assessment Output
• List of facts currently true in the world– 16B11 at holding_area ha11
– 16B14 presumed dead
– Enemy ADA platoon threatening battle_position bp141
– Target in EA nelson has been attritted
– I’ve communicated order76 to 16C11
– I’ve received new orders from my commander
• Facts are echelon and unit type specific– Battalion tracks different information than company
– CSS unit tracks different information than RWA unit
– Determined by domain theory

JSIMS / ASTT Workshop14 May 1999
What are Plans?
• Hierarchically ordered sequences of tasks
• Plans capture assumptions– Column movement assumes enemy contact unlikely
• Plans capture task dependencies– Move_to_Holding_Area results in unit being at the HA,
(precondition to moving to the Battle_Position)– OPFOR and Co must be at the Engage_area simultaneously
JSIMS / ASTT Workshop14 May 1999
Planning Basics
• Plan generation– Sketch basic structure via decomposition– Fill in details with causal-link planning
• Plan execution– Explicitly initiate and terminate tasks– Initiate tasks whose preconditions unify with the current world – Terminate tasks whose effects unify with the current world
JSIMS / ASTT Workshop14 May 1999
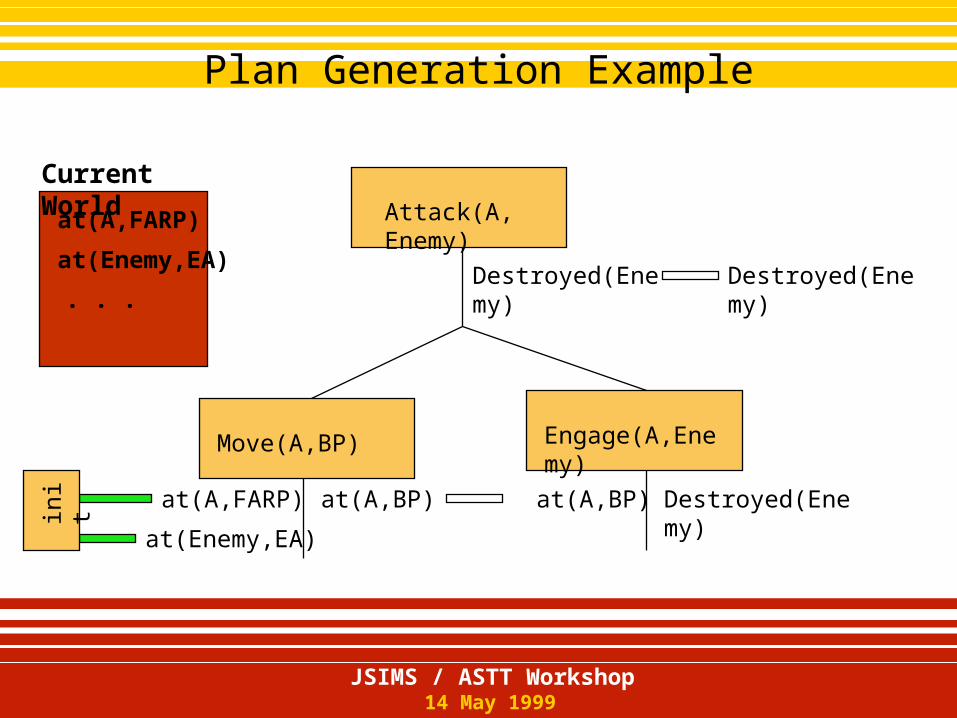
Plan Generation Example
Destroyed(Enemy)
Attack(A, Enemy)
Move(A,BP) Engage(A,Enemy)
at(A,BP)at(A,FARP)
at(Enemy,EA)
at(A,BP) Destroyed(Enemy)
Destroyed(Enemy)
at(A,FARP)
at(Enemy,EA)
Current World
. . .
init

JSIMS / ASTT Workshop14 May 1999
Situation Interrupts Happen!
destroyed(Enemy)
Attack(A, Enemy)
Move(A,BP) Engage(A,Enemy)
at(A,BP)at(A,FARP) at(A,BP) destroyed(Enemy)
destroyed(Enemy)
at(A,FARP)
at(Enemy,EA)
Current World
active(A)
Star
t of
OP
ADA
Attack
active(A)active(A)

JSIMS / ASTT Workshop14 May 1999
Reacting to Situation Interrupt
• Situations evolve unexpectedly– Goals change, actions fail, intelligence incorrect
• Planner detects if change affects plan– Invalidate assumptions?– Violate dependency constraints?
• Repair plans in response to ramifications– Retract tasks invalidated by change– Add new tasks– Re-compute dependencies

JSIMS / ASTT Workshop14 May 1999
Supporting Technologies
Collaborative Planning

JSIMS / ASTT Workshop14 May 1999
Collaborative Planning
• Reason about plans of other entities– Friendly forces, OPFOR
• Reason about interactions between plans• Reason about protocols for resolving
conflicts• Reason about my role in the organization

JSIMS / ASTT Workshop14 May 1999
Interaction Example
Move(A,BP) Engage(A,Y)
Dead(Y)
Move(CSS,HQ)
at(CSS,HQ)at(CSS,FAA)
at(gas,FAA) at(gas,HQ)
at(A,BP)at(A,FAA) at(A,BP)
at(gas,FAA)
Op e
rati
on B
egin
s
Combat Service Support Plan
Attack Helicopter Company Plan
resupplied(HQ)

JSIMS / ASTT Workshop14 May 1999
Planning Stances
• Authoritative – Order subordinate to alter his plans
• Tell CSS to abandon re-supply operation
• Deferential – Change my plans to de-conflict with superior
• Find a way to work around re-supply activity
• Adversarial – Try to introduce conflict in other agent’s plan

JSIMS / ASTT Workshop14 May 1999
Plan Management
• Must model when to use different stances– Involves organizational issues
Where do I fit in the organization
– Stances may need to change over timeDuring COA Analysis, adopt an adversarial stance towards ones own plans
• Must model how stances influence planning– How do we alter COA generation

JSIMS / ASTT Workshop14 May 1999
When to Use a Stance
• Model the collaborative planning process– Includes management tasks that modulate the
generation of tactical plans• Tasks refer to specific tactical plans• Specify preconditions on changing stance
– Includes knowledge of one’s organizational role
• Planner constructs management plans– Use same mechanisms as tactical planning

JSIMS / ASTT Workshop14 May 1999
Example Management Plan
• Explicitly modeling Military Decision Making Process
COADevelopment
Authoritative towards subordinatesDeferential towards superiorsAdversarial towards OPFOR
COAAnalysis
Authoritative towards OPFORAdversarial towards self (war gaming)
Tasks Stances

JSIMS / ASTT Workshop14 May 1999
Implementing Stances
• Implemented as search control on planner– Plan manager:
Takes executing management tasks
Generates search control recommendations
• Example: Deferential Stance– When giving orders to subordinates
Indicate subset of plan is fixed (defer to this)
Indicate rest of plan is flexible– Plan manager enforces these restrictions

JSIMS / ASTT Workshop14 May 1999
Interaction Example
Move(A,BP)
Move(CSS,HQ)
at(CSS,HQ)at(CSS,FAA)
at(gas,FAA) at(gas,HQ)
at(A,BP)at(A,FAA)
at(gas,FAA)
Init
ial S
tate
PlannerRetract
Retract
Deferential towards
Combat Service Support Plan
Make CSS Planner defer to Company A’s Plan
Manager

JSIMS / ASTT Workshop14 May 1999
Approach
• Encode theory of organizational interaction– Represent stances, authority relationships
• Processed by plan manager
general purposeReasoner(Planner)
Plan Manager Management
Plans
Management Plans
Tactical PlansTactical Plans
ManagementTheory
domain independent
ManagementTheory
domain independent
Tactical Domain Theory
Tactical Domain Theory

JSIMS / ASTT Workshop14 May 1999
Supporting Technologies
Intelligence Modeling

JSIMS / ASTT Workshop14 May 1999
Motivation
• Largely ignored intelligence issuese.g. STOW program did model
Sensor platforms like JSTARS
Information networks like CGS Intelligence system
Did not model
How information transformed into intelligence
Collection management

JSIMS / ASTT Workshop14 May 1999
Intelligence critical for realistic C2
• Close interplay between intelligence and COA Development
• Intelligence guides COA development
• COA development drives intelligence needs
• Intelligence availability constrains actions– Some COA must be abandoned if one can’t gather
adequate intelligence
JSIMS / ASTT Workshop14 May 1999
Intelligence critical for realistic C2
• Intelligence constrains pace of battle
• When can a satellite observe?
• How long to insert surveillance (LRSU)?
• How long before I must commit to COA?

JSIMS / ASTT Workshop14 May 1999
Intelligence critical for realistic C2
• Intelligence collection must be focused– Commanders must:
• Prioritize their intelligence needs• Understand higher-level intelligence priorities• Provide intelligence guidance to subordinates
e.g. Simulation Information Filtering Tool [Stone et. al]
JSIMS / ASTT Workshop14 May 1999
Priority Intelligence Requirements
• Focus on specification and use of PIR
Information that directly feeds the key decisions that will determine the success or failure of the mission
– Key component of Army mission planning• Specified in CCIR section of Operation Orders
– Specifies what Cdr wants to know about OPFOR
– Drives position of sensors and observation posts

JSIMS / ASTT Workshop14 May 1999
Brigade Planning (simplified)
– Identify Engagement Area (EA Pad)Should canalize OPFOR and restrict movement
– Identify launch time
Require 2-hour notice EA Pad
AALincoln
• Attack 2nd echelon tank division (TD)

JSIMS / ASTT Workshop14 May 1999
PL ECHO
Brigade PIR
– When will TD leave AA Lincoln?Verifies enemy intent
– When will TD reach PL Echo?
Satisfies the need for 2-hour notice
Further verifies enemy intent
Location of PL Echo driven by PIREA Pad
AALincoln
2hrs

JSIMS / ASTT Workshop14 May 1999
EA Pad
PL ECHO
Intelligence Plan
SLAR Monitor movement from assembly area
LRSU Trigger attack: TD 2hrs from EA Pad
Assembly Area
JSIMS / ASTT Workshop14 May 1999
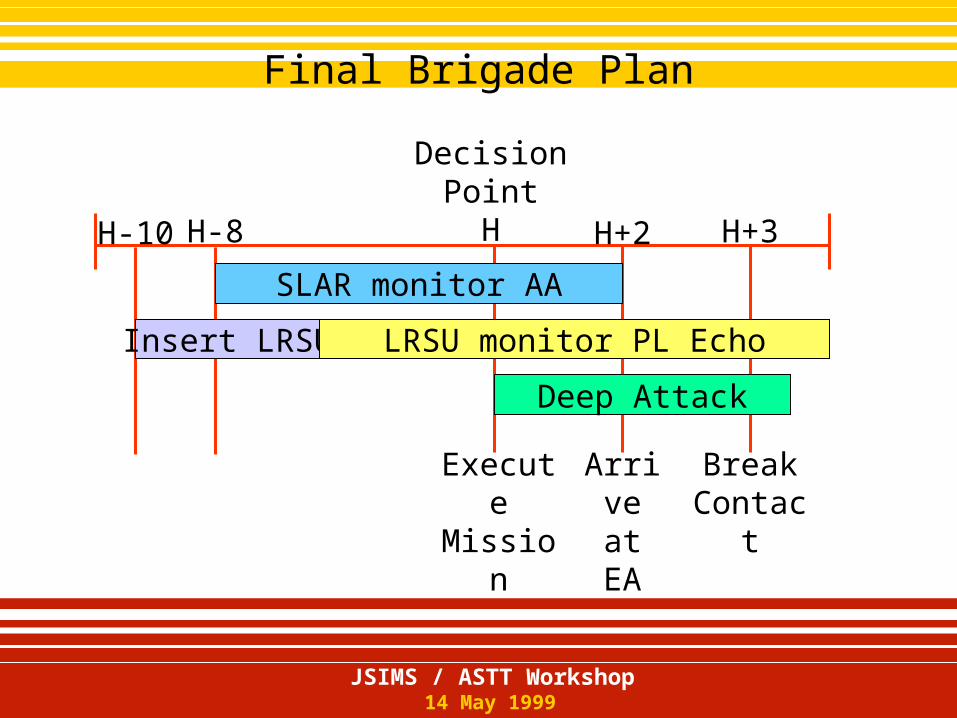
Final Brigade Plan
Execute Mission
Arrive at EA
Break Contact
DecisionPoint
H H+2 H+3H-8H-10
Insert LRSU LRSU monitor PL Echo
Deep Attack
SLAR monitor AA

JSIMS / ASTT Workshop14 May 1999
Automating PIR
• Identify PIR in my own plans– Find preconditions, assumptions, and triggering conditions
that are dependent on OPFOR behavior
• Extract PIR from higher echelon orders– Specialize as appropriate for my areas of operation
• Derive tasks for satisfying PIR– Sensor placement
• Ensure consistency of augmented plans

JSIMS / ASTT Workshop14 May 1999

JSIMS / ASTT Workshop14 May 1999
Summary
• Realistic, cost-effective C2 modeling– Automate C2 processes– Need flexible, multi-agent planning
• Continuous Planning– Integrates situation awareness, planning, execution, and repair
• Collaborative Planning– Reason about others’ plans, plan interactions– Represent wide range of organizational interactions using
planning stances
JSIMS / ASTT Workshop14 May 1999
Status of Work

JSIMS / ASTT Workshop14 May 1999
Status
• C2 Agent Work To Be Done– Augment temporal– Finish PIR prototype– Sit assessment augmentation– Supporting Documentation– Evaluation– Abstract specification of planner– More work on stances as time avails
JSIMS / ASTT Workshop14 May 1999
C2 Knowledge Base
• C2 knowledge base (KB)– Domain theory for Attack Helicopter Battalion /
Company– Domain-independent planning and collaboration KB

JSIMS / ASTT Workshop14 May 1999
RWA Soar Agents
• Intelligent Synthetic Forces– RWA-Soar pilots capable of taking direction from
C2 agent

JSIMS / ASTT Workshop14 May 1999
Maturity of Work

JSIMS / ASTT Workshop14 May 1999
Maturity
• Conceptually mature (algorithmic)– continuous planning mature
• weak link is search control issues
– collaboration approaching maturity
• Needs work before transition to operational status– robustification– KA issues tools– Are there issues in modeling other platforms?

JSIMS / ASTT Workshop14 May 1999
Demonstration
JSIMS / ASTT Workshop14 May 1999
Demonstration Scenario
• Attack Helicopter Battalion (AH-64)– Battalion Commander– 3 Helicopter Companies
• Company Commanders
• Apache Pilots
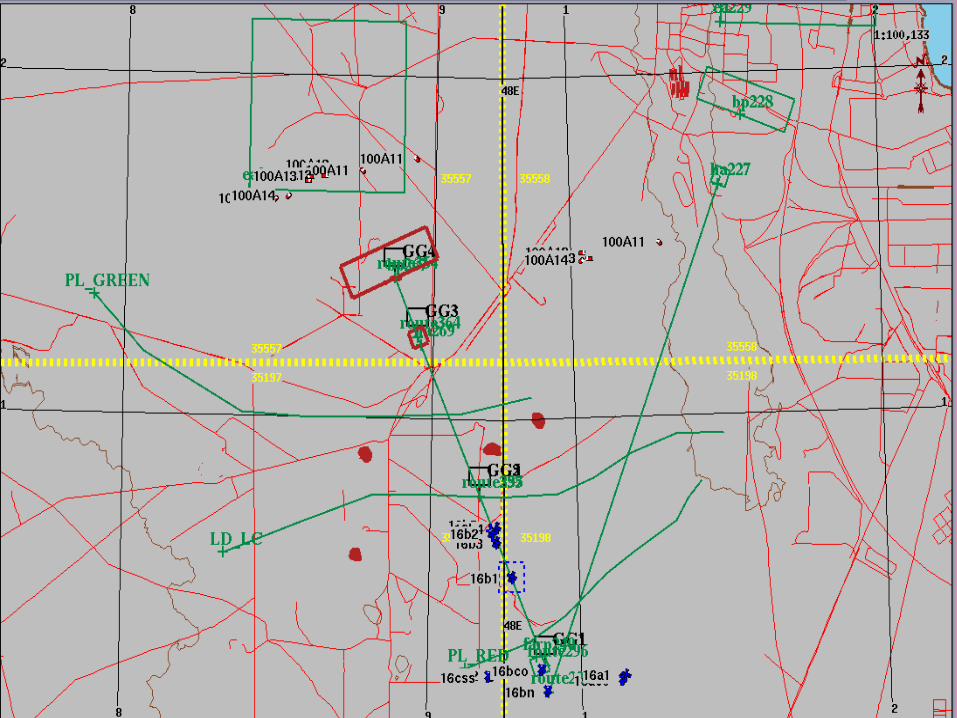
– 1 Combat Service Support Commander
• Deep Attack Mission Scenario– Companies move from Assembly Area to Holding Area– Situation interrupt: unexpected enemy forces in Holding
Area– Dynamically re-plan and execute mission

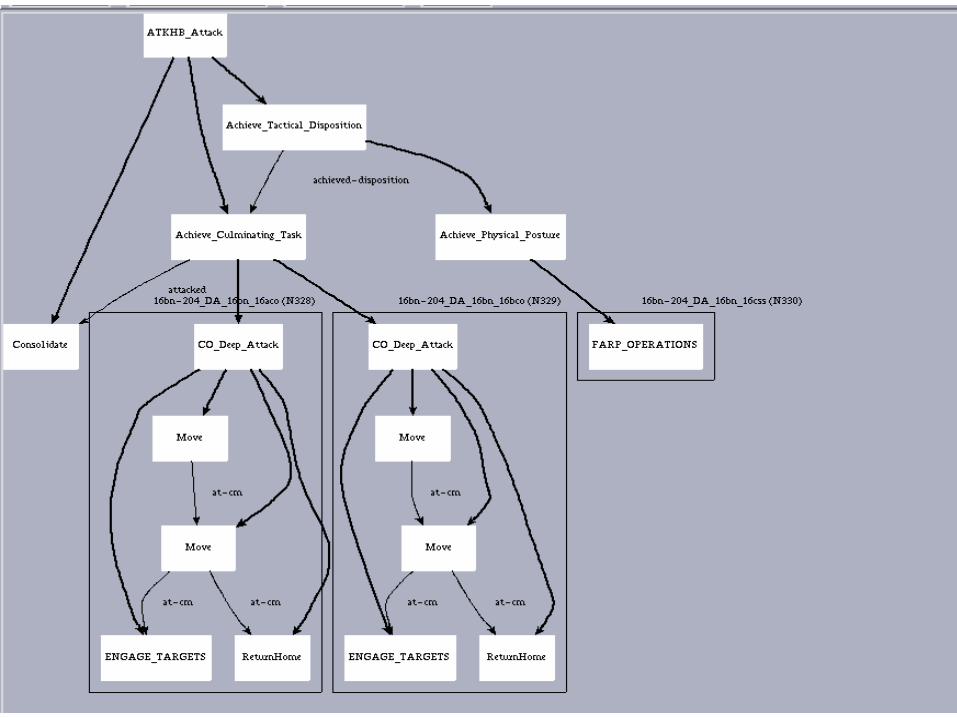

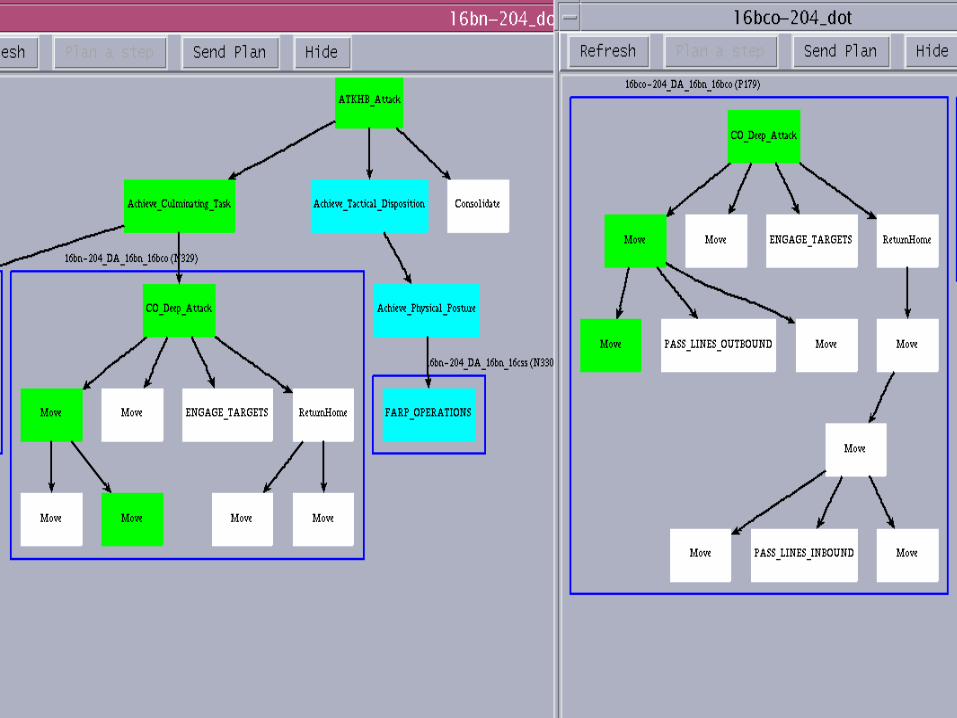

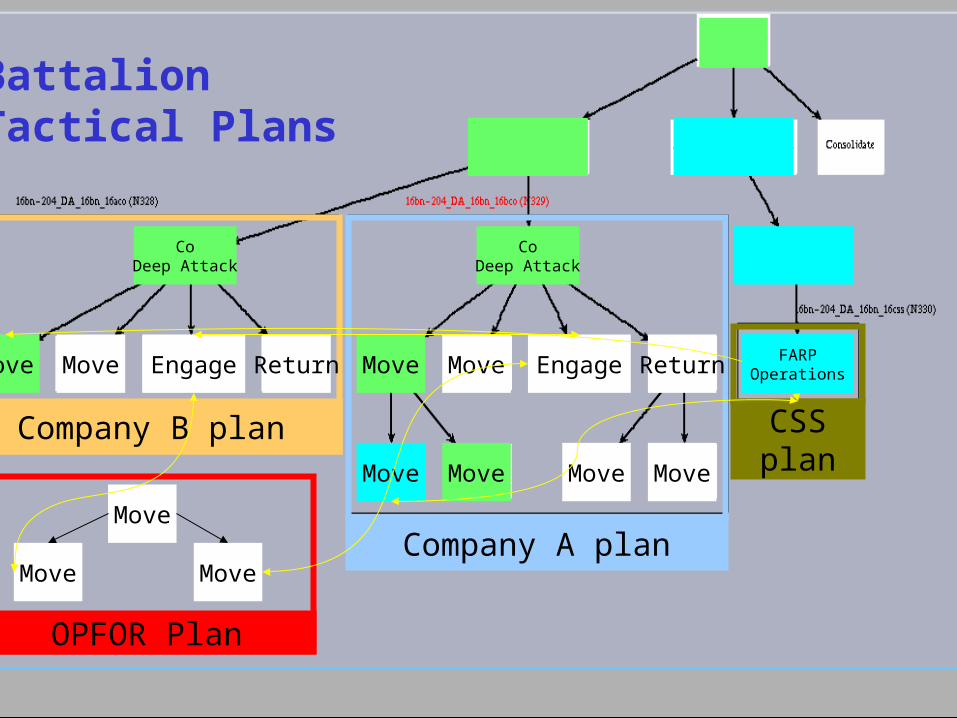
Company A plan
Company B plan CSSplan
Move Move Move
Move Move Move Move
Engage EngageReturn ReturnMove
OPFOR Plan
Move Move
Move
Battalion Tactical Plans
CoDeep Attack
CoDeep Attack
FARPOperations





























