Embed Size (px)
Citation preview

Kanalschätzverfahren für Mobilfunksysteme mitMehrträgermodulation OFDM
Von der Fakultät Informatik, Elektrotechnik und Informationstechnikder Universität Stuttgart zur Erlangung der Würde einesDoktor-Ingenieurs (Dr.-Ing.) genehmigte Abhandlung
Vorgelegt von
Friedrich Sanzi
aus Kirchheim/Teck
Hauptberichter: Prof. Dr.-Ing. J. SpeidelMitberichter: Prof. Dr.-Ing. N. FrühaufTag der mündlichen Prüfung: 5. Februar 2003
Institut für Nachrichtenübertragung der Universität Stuttgart2003

2
Meinem verehrten Lehrer, Herrn Prof. Dr.-Ing. Joachim Speidel, danke ich sehr herzlichfür die Anregung zu dieser Arbeit und die hervorragenden Arbeitsmöglichkeiten an seinemInstitut. Sein reges Interesse und seine ständige Gesprächsbereitschaft haben wesentlich zumGelingen dieser Arbeit beigetragen.
Herrn Prof. Dr.-Ing. Norbert Frühauf danke ich recht herzlich für die Übernahme des Mitbe-richts.
Weiter danke ich den von mir betreuten Studenten und den Institutsmitarbeitern, die meineArbeit in vielfältiger Weise unterstützt haben.
3

4
Inhaltsverzeichnis
Abkürzungen 7
Formelzeichen 9
Kurzfassung 13
Abstract 13
1 Einleitung 15
2 OFDM-Übertragungssystem 17
2.1 Zeitdiskretes OFDM-System . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Mobilfunkkanal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.2.1 Beschreibung des Mobilfunkkanals . . . . . . . . . . . . . . . . . 21
2.2.2 WSSUS-Kanal . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2.3 Modellierung des Mobilfunkkanals . . . . . . . . . . . . . . . . . 24
2.3 Modell des Übertragungssystems für Mobilfunkkanäle . . . . . . . . . . . 27
2.4 OFDM-System für Mobilkommunikation . . . . . . . . . . . . . . . . . . 33
3 Kanalschätzung mit Interpolationsfiltern 37
3.1 Übertragungssystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.1.1 Sender . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.1.2 Pilotraster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.1.3 Empfänger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.2 Kanalschätzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.2.1 Interpolationsfilter . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.2.2 Abtasttheorem der Kanalübertragungsfunktion . . . . . . . . . . . 49
5
3.3 Simulationsergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.3.1 Kanalcodierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.3.2 Bitfehlerhäufigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4 Kanalschätzung mit iterativer Filterung 59
4.1 Übertragungssystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.1.1 Struktur des iterativen Empfängers . . . . . . . . . . . . . . . . . . 60
4.1.2 Soft-Mapper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.1.3 Symbolbasierte Kanalschätzung . . . . . . . . . . . . . . . . . . . 62
4.2 Konvergenzverhalten der iterativen Schleife . . . . . . . . . . . . . . . . . 68
4.2.1 Transinformationsdiagramm . . . . . . . . . . . . . . . . . . . . . 68
4.2.2 EXIT-Diagramm . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.3 Bitfehlerhäufigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
5 APP–Kanalschätzung 89
5.1 Übertragungssystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.1.1 Empfängerstruktur mit APP-Kanalschätzung . . . . . . . . . . . . 90
5.1.2 APP-Schätzmethode . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.2 Simulationsergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.2.1 EXIT-Diagramm . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5.2.2 Bitfehlerhäufigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.3 Weitere Aspekte der APP-Kanalschätzung . . . . . . . . . . . . . . . . . . 104
5.3.1 Pilottonanordnung . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5.3.2 Diversitätsempfang . . . . . . . . . . . . . . . . . . . . . . . . . . 107
5.3.2.1 Übertragungssystem . . . . . . . . . . . . . . . . . . . . 107
5.3.2.2 APP-Kanalschätzung bei Diversitätsempfang . . . . . . . 108
5.3.2.3 Diversitätsempfang mit einem APP-Kanalschätzer . . . . 110
5.3.2.4 Analyse . . . . . . . . . . . . . . . . . . . . . . . . . . 111
6 Zusammenfassung 115
Literaturverzeichnis 117
6
Abkürzungen
APP a posteriori probabilityBFH BitfehlerhäufigkeitBPSK Binary Phase Shift Keying, binäre PhasenumtastungCDM Code Division MultiplexingD/A Digital/AnalogDeMUX DemultiplexerDPSK Differential Phase Shift Keying, differentielle PhasenumtastungDVB-T Digital Video Broadcasting - Terrestrial, digitales terrestrisches FernsehenDFT Discrete Fourier Transformation, diskrete Fourier-TransformationEXIT Extrinsic Information Transfer, extrinsische InformationsübergabeFFT Fast Fourier Transformation, schnelle Fourier-TransformationHF HochfrequenzICI Inter Carrier Interference, NachbarkanalbeeinflussungIDFT Inverse Discrete Fourier Transformation, inverse diskrete Fourier-
TransformationIFFT Inverse Fast Fourier Transformation, inverse schnelle Fourier-TransformationISI Inter Symbol Interference, NachbarsymbolbeeinflussungKS KanalschätzungL Log-LikelihoodMUX MultiplexerOFDM Orthogonal Frequency Division MultiplexingP/S Parallel/SeriellQAM Quadrature Amplitude Modulation, Quadratur-AmplitudenmodulationQPSK Quaternary Phase Shift Keying, quaternäre PhasenumtastungS/P Seriell/ParallelWSSUS Wide-Sense Stationary Uncorrelated Scattering, schwache Stationarität und
unkorrelierte StreuungZP Zyklischer Präfix
7

8
Formelzeichenaε Pilotbitbν InformationsbitB Bandbreite des SendesignalscL Lichtgeschwindigkeit im Vakuumcµ Codiertes Bitcµ Gesendetes codiertes BitDf Abstand der Pilottöne in FrequenzrichtungDt Abstand der Pilottöne in ZeitrichtungEb Mittlere Energie pro InformationsbitES Mittlere Signalenergiefk Unterträgerfrequenzfmap,M Mapping-FunktionfA Abtastfrequenz des D/A-UmsetzersfD Dopplerverschiebung, DopplerfrequenzfDmax Maximale DopplerverschiebungfDν Dopplerverschiebung des ν-ten PfadesfHF Hochfrequente Trägerfrequenz des SendesignalsfU UnterträgerabstandF (f, fD) Dopplervariante ÜbertragungsfunktionG Vorwärtspolynom des rekursiven systematischen FaltungsencodierersGr Rückwärtspolynom des rekursiven systematischen FalstungencodierersGzp Anzahl der Werte im Schutzintervallh(τ, t) Zeitvariante Impulsantwort des Kanalshz,q,l Diskrete zeitvariante Impulsantwort des KanalsH(f, t) Zeitvariante ÜbertragungsfunktionHA(f, t) Abgetastete zeitvariante ÜbertragungsfunktionHk,l Kanalübertragungskoeffizient am Unterträger k im l-ten OFDM-SymbolHξ Kanalübertragungskoeffizient für das Datensymbol Zξ
I TransinformationJ Mittlerer quadratischer SchätzfehlerK Anzahl der belegten Unterträger in einem OFDM-SymbolL Anzahl der Pfade des MehrwegemodellsLh Maximale diskrete Verzögerung des KanalsLx
a,µ A priori-L-Wert von Bit xµ
Lxe,µ Extrinsischer L-Wert von Bit xµ
Lxµ L-Wert von Bit xµ
LB Anzahl der OFDM-Symbole in einem BlockM Anzahl der Werte eines OFDM-Symbols im ZeitbereichM Anzahl der Bits pro QAM-Symbolnn,l Diskretes Rauschsignal nach Entfernung des Schutzintervallsnq,l Diskretes RauschsignalN Ordnung der FFTN0 Varianz des Rauschsignals Nk,l
Nk,l Rauschsignal nach FFT des Unterträgers k im l-ten OFDM-Symbol
9
Nξ Additives Rauschen zum Datensymbol Zξ
pf (x) Wahrscheinlichkeitsdichte der Zufallsvariablen f , die vom Parameter x abhängtPh(τ) Verzögerungs-LeistungsdichtespektrumPh(τ, ∆t) Verzögerungs-KreuzleistungsdichtespektrumPF (fD) Doppler-LeistungsdichtespektrumPF (∆f, fD) Doppler-KreuzleistungsdichtespektrumPS(τ, fD) StreufunktionPζ PilotsymbolRc CoderateRf (∆x) Autokorrelationsfunktion der Funktion f(x)Rg NutzdauerrateRn NutzsymbolrateS(τ, fD) Dopplervariante ImpulsantwortSA(τ, fD) Dopplervariante Impulsantwort zu HA(f, t)TA AbtastperiodeTG Dauer des SchutzintervallsTS Gesamte Dauer eines OFDM-SymbolsTU Nutzdauer eines OFDM-Symbolsu(t) Sendesignalup OFDM-Signalwert im Zeitbereich vor Einfügung des Schutzintervallsux,i PrädiktorkoeffizientUm QAM-Sendesymbolv Geschwindigkeit des Empfängersvm,k,l Filterkoeffizient des Interpolationsfilters in ZeitrichtungVL Größe des Zufallsinterleaversw(t) Empfangssignalwm,k Filterkoeffizient des Interpolationsfilters in Frequenzrichtungwp OFDM-Empfangssignalwert im Zeitbereich nach Entfernung des Schutz-
intervallsWm QAM-Empfangssymbolxn,l n-ter OFDM-Signalwert im Zeitbereich des l-ten OFDM-Symbols vor P/S-
Umsetzerxq,l q-ter OFDM-Signalwert im Zeitbereich des l-ten OFDM-Symbols nach Einfü-
gung des Schutzintervalls vor P/S-UmsetzerXk,l QAM-Sendesymbol des Unterträgers k im l-ten OFDM-Symbolyn,l n-ter OFDM-Empfangssignalwert im Zeitbereich des l-ten OFDM-Symbols
nach Entfernung des Schutzintervallsyq,l q-ter OFDM-Empfangssignalwert im Zeitbereich des l-ten OFDM-Symbols
nach S/P-UmsetzerYk,l QAM-Empfangssymbol des Unterträgers k im l-ten OFDM-SymbolYξ Empfangenes Datensymbol Zξ
Zξ Datensymbol
αν Winkel zwischen Fahrtrichtung und eintreffender Welle des ν-ten Pfadesδ(t) Diracstoßδk Kronecker-Symbol
10
φν Phase des ν-ten Pfadesγk Metrik-Inkrement des APP-Schätzers in Frequenzrichtungγl Metrik-Inkrement des APP-Schätzers in ZeitrichtungΛ Anzahl der Empfangsantennenτ Verzögerungτmax Maximale Verzögerung des Kanalsτν Verzögerung des ν-ten Pfadesσ2
N Varianz von Real- und Imaginärteil von Nk,l
�Menge der natürlichen Zahlen
�Menge der ganzen Zahlen
◦−• Symbol für die Fouriertransformation•−◦ Symbol für die Fourierrücktransformationa Vektora
T Transponierter Vektor zu a
a∗ Vektor mit konjugiert komplexen Elementen von a
A MatrixA
−1 Inverse Matrix von A
E {x} Erwartungswert der Zufallsgröße xDiv Ganzzahlige DivisionJ0 Besselfunktion 0-ter Ordnungmin{x1, x2} Kleinstes Element der Menge {x1, x2}Mod Rest der ganzzahligen DivisionPr[.] Wahrscheinlichkeit eines EreignissesR{z} Realteil der komplexen Zahl zx Schätzwert von der Größe xz∗ Konjugiert komplexe Zahl zu z
11

12

KurzfassungAufgrund der zeitvarianten Ausbreitungsbedingungen des Mobilfunkkanals stellt die Kanal-schätzung bei Mehrträgersystemen, z. B. Orthogonal Frequency Division Multiplexing Sys-tems, eine Herausforderung für den Empfänger dar. Um die Detektion der gesendeten Datenbei nicht-differentieller Modulation zu ermöglichen, muss die zweidimensionale Kanalüber-tragungsfunktion geschätzt werden. Um eine Kanalschätzung beim Empfänger durchführenzu können, werden Pilotsymbole in den zu sendenden Datenstrom periodisch eingefügt. Indieser Arbeit werden drei Verfahren zur Kanalschätzung vorgestellt und analysiert. Das ersteVerfahren schätzt den Kanal durch die Kaskadierung zweier eindimensionaler Interpolati-onsfilter, deren Koeffizienten das Wiener-Kriterium erfüllen. Der zweite Kanalschätzer mititerativer Filterung und Decodierung stellt eine Erweiterung des ersten Kanalschätzers dar.Dieser Schätzer koppelt das Ergebnis des Kanaldecodierers zurück, um schrittweise verbes-serte Schätzwerte der Kanalübertragungsfunktion zu berechnen. Das dritte Verfahren basiertauf einer a posteriori Wahrscheinlichkeitskanalschätzung. Die Schätzung der zweidimen-sionalen Kanalübertragungsfunktion erfolgt durch eine Verknüpfung zweier eindimensiona-ler a posteriori Wahrscheinlichkeitsschätzer für die Zeit- und die Frequenzrichtung. Diesebeiden Kanalschätzer sind in einer Iterationsschleife nach dem Prinzip der Turbodecodie-rung eingebettet. Die Leistungsfähigkeit der verschiedenen Kanalschätzer wird auf der Basisvon Bitfehlerhäufigkeiten ausgewertet. Zusätzlich wird das Konvergenzverhalten der Itera-tionsschleife des zweiten und dritten Schätzers mit Hilfe des Diagramms der extrinsischenInformationsübergabe betrachtet.
AbstractThe time varying propagation conditions of the mobile channel make channel estimation formulticarrier systems, e. g. orthogonal frequency division multiplexing systems, a demandingtask at the receiver. To allow for coherent detection, the two-dimensional channel trans-fer function must be estimated. To support estimation, often pilot symbols are periodicallyinserted into the transmitted signal. In this thesis, three different channel estimation me-thods are described and analysed. The first one estimates the channel by cascading two one-dimensional finite impulse response interpolation filters whose coefficients are based on theWiener design criterion. The second channel estimator with iterative filtering and decodingis an extension of the first one. It feeds back the result of the channel decoder to iterativelycompute an improved estimate of the channel transfer function. Finally, the third method toestimate and track the channel is based on a posteriori probability channel estimation. Theestimation of the two-dimensional channel transfer function is performed by a concatenationof two one-dimensional a posteriori probability estimators in time and frequency direction,respectively. These two estimators are embedded in an iterative loop similar to the turbodecoding principle. The performance of the different channel estimators is evaluated on thebasis of bit error rate charts. In addition, the convergence of the iterative decoding loop ofthe second and third estimator is studied with the Extrinsic Information Transfer Chart.
13

14
Kapitel 1
Einleitung
In den letzten Jahren ist das Interesse an der Mobilkommunikation deutlich gestiegen. Mitdieser Entwicklung ist auch die Frage nach geeigneten Modulationsverfahren verbunden.Eines dieser Modulationsverfahren, dem erst in den letzten Jahren der Durchbruch gelang, istdas Mehrträgermodulationsverfahren Orthogonal Frequency Division Multiplexing (OFDM)[1].
Das Grundprinzip der OFDM-Technik besteht darin, dass die gesamte Übertragungsband-breite in viele schmalbandige Teilbänder aufgeteilt wird, deren Mittenfrequenzen äquidistantsind. Diese Mittenfrequenzen werden auch als Unterträgerfrequenzen bezeichnet. Der Ab-stand der Unterträgerfrequenzen ist so gewählt, dass die Unterträger orthogonal zueinandersind. Das Sendesignal bestimmt sich aus der Summe dieser vielen Teilsignale. Dabei besitzendiese Teilsignale eine große Symboldauer. Dadurch wird erreicht, dass bei der Übertragungüber einen frequenzselektiven zeitvarianten Kanal in jedem Teilband ein geringer Entzer-reraufwand entsteht. Der einfachste Entzerrer führt eine Multiplikation mit einem komplexenFaktor für jedes Teilband durch. Ein weiterer Punkt ist, dass zur Realisierung dieses Modu-lationsverfahrens die schnelle Fourier-Transformation, Fast Fourier Transformation (FFT),verwendet werden kann.
Für das in Europa entwickelte digitale terrestrische Fernsehsystem Digital Video Broadcas-ting - Terrestrial (DVB-T) [2] wurde das OFDM-Verfahren ausgewählt. Die einzelnen Unter-träger werden dabei mit einem nicht-differentiellen Verfahren moduliert. Dieses wird in derLiteratur auch mit kohärenter Modulation bezeichnet, z. B. [3, 4]. Damit nun die gesendetenVideodaten beim Empfänger wieder zurückgewonnen werden können, muss der Empfängerden Kanal kennen. Da dieses i. A. nicht der Fall sein wird, muss im Empfänger eine Kanal-schätzung erfolgen, um die Entzerrerkoeffizienten der einzelnen Teilbänder zu bestimmen.Die Kanalschätzung basiert dabei auf Pilotsignalen, die in das zu übertragende Datensignaleingefügt werden [2]. Die Kanalschätzung stellt für einen Empfänger eine wichtige und not-wendige Aufgabe dar.
In der vorliegenden Arbeit werden verschiedene Kanalschätzverfahren für das Mehrträger-modulationsverfahren OFDM untersucht. Dabei ist vor allem die Datenübertragung überzeitvariante und frequenzselektive Kanäle von Interesse. Für die Kanalschätzverfahren, die indieser Arbeit betrachtet werden, werden die Grenzen anhand der gegebenen physikalischenEigenschaften des Kanals ermittelt.
15

In Kapitel 2 wird das gesamte Übertragungssystem vorgestellt. Dazu wird ausführlich auf dieMehrträgermodulation OFDM eingegangen. Danach erfolgt die Beschreibung des zeitvari-anten frequenzselektiven Übertragungskanals. Die Auswirkungen des Übertragungskanalsauf die OFDM-Übertragung werden anschließend aufgezeigt. Den Abschluss dieses Kapi-tels bildet die Darstellung des gesamten Übertragungssystems für die Mobilkommunikation.
Mit der Kanalschätzung, basierend auf Interpolationsfilter, befasst sich Kapitel 3. Es wird dieStruktur des Empfängers erläutert und die Anordnung vorgestellt, wie die Pilotsignale in denDatenstrom eingebettet werden. Anschließend wird die Berechnung der Filterkoeffizientenfür die Interpolationsfilter hergeleitet. Eine Diskussion über die Grenzen dieses Schätzver-fahrens anhand der physikalischen Eigenschaften des Kanals schließt dieses Kapitel ab.
In Kapitel 4 erfolgt eine Erweiterung der Empfängerstruktur aufgrund der in Kapitel 3 erhal-tenen Ergebnisse. Diese Erweiterung beinhaltet eine Iterationsschleife, um eine Kanalschät-zung, basierend auf iterativer Filterung und Decodierung, durchführen zu können. Anschlie-ßend werden die Filterkoeffizienten dieses Schätzverfahrens hergeleitet. Zum Abschluss die-ses Kapitels wird die Leistungsfähigkeit des Empfängers in Abhängigkeit von den Parame-tern des Übertragungskanals untersucht.
Das dritte Kanalschätzverfahren, das in dieser Arbeit untersucht wird, erläutert Kapitel 5.Entsprechend zu Kapitel 4 beinhaltet die Empfängerstruktur eine Iterationsschleife. Jedochwird für die Kanalschätzung ein weiterer Aspekt verwendet, so dass sich dieses Schätzver-fahren deutlich von den vorangegangenen Verfahren unterscheidet. Dieses Schätzverfahrennützt zusätzlich zur Kontinuität der Kanalübertragungsfunktion das begrenzte Symbolalpha-bet der Sendesymbole aus. Nach einer ausführlichen Erklärung des Kanalschätzverfahrenswird die Leistungsfähigkeit des Empfängers in Abhängigkeit von den Kanalparametern un-tersucht und mit den beiden anderen vorgestellten Schätzverfahren verglichen.
Die wichtigsten Ergebnisse werden in Kapitel 6 zusammengefasst. Dieses Kapitel bildetauch den Abschluss dieser Arbeit.
16
Kapitel 2
OFDM-Übertragungssystem
In diesem Kapitel wird das OFDM-Übertragungssystem für Mobilkommunikation vorge-stellt, das als Grundlage für die folgenden Kapitel dient. Die Betrachtung des Übertragungs-systems erfolgt dabei im äquivalenten zeitdiskreten Basisband, so dass zur Beschreibung desSystems komplexwertige zeitdiskrete Signale herangezogen werden.
2.1 Zeitdiskretes OFDM-System
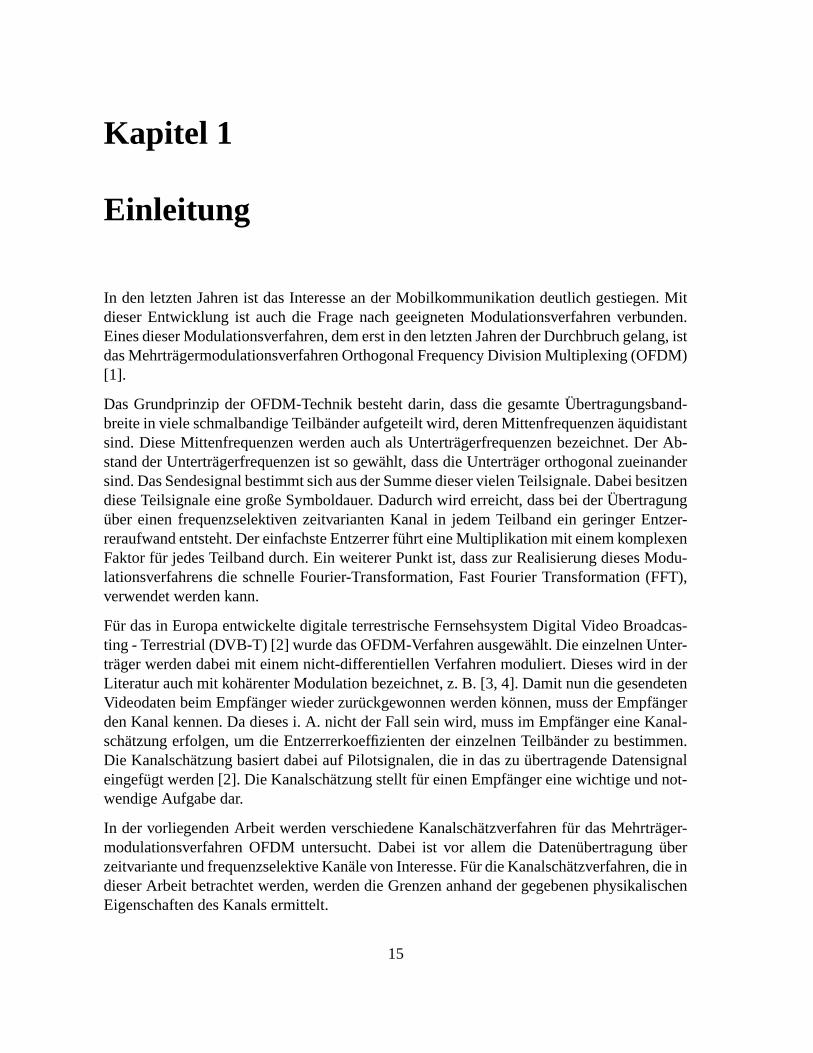
In Bild 2.1 ist der zeitdiskrete OFDM-Modulator dargestellt. Dieser Modulator wird vor-zugsweise aufgrund der schnellen Implementierungsmöglichkeit mit Hilfe der inversen FFT(IFFT) realisiert. I. A. basiert diese Modulation auf der inversen diskreten Fourier-Transfor-mation, Inverse Discrete Fourier Transformation (IDFT).
-Um
S
P
-X0,l
-Xk,l
-XN−1,l
IFFT
N -terOrdnung
-x0,l
-xn,l
-xN−1,l
P
S
-up
Bild 2.1: Zeitdiskreter OFDM-Modulator
Das Eingangssignal in den Modulator ist mit Um bezeichnet. Dabei steht Um für ein QAM-Symbol zum diskreten Index m. Als erstes erfolgt im Modulator eine Seriell/Parallel-Um-setzung (S/P-Umsetzung), um die Eingangssymbole Um in die Symbole Xk,l überzuführen.Der Zusammenhang ist nun wie folgt:
Xk,l = UN ·l+k ; l ∈ �; k = 0, 1, . . . , N − 1 (2.1)
17
Durch diese Umsetzung wird eine blockweise Verarbeitung erzielt, d.h. das Eingangssig-nal Um wird in Blöcke zu N Werten eingeteilt. Die IFFT arbeitet anschließend auf diesenBlöcken, wobei N die Ordnung der IFFT angibt. Damit die IFFT verwendet werden kann,muss N eine Zweierpotenz sein. Das Ausgangssignal xn,l der IFFT in Abhängigkeit desEingangssignals Xk,l lautet:
xn,l =1√N
N−1∑
k=0
Xk,l · ej2πkn
N (2.2)
Nach der sich anschließenden Parallel/Seriell-Umsetzung (P/S-Umsetzung) erhält man dasSendesignal up. Das Signal up bestimmt sich aus dem Ausgangssignal xn,l der IFFT nachfolgender Gleichung:
up = xp Mod N,p Div N ; p ∈ �(2.3)
Der Operator Div steht für die ganzzahlige Division und der Operator Mod für den Resteiner ganzzahligen Division.
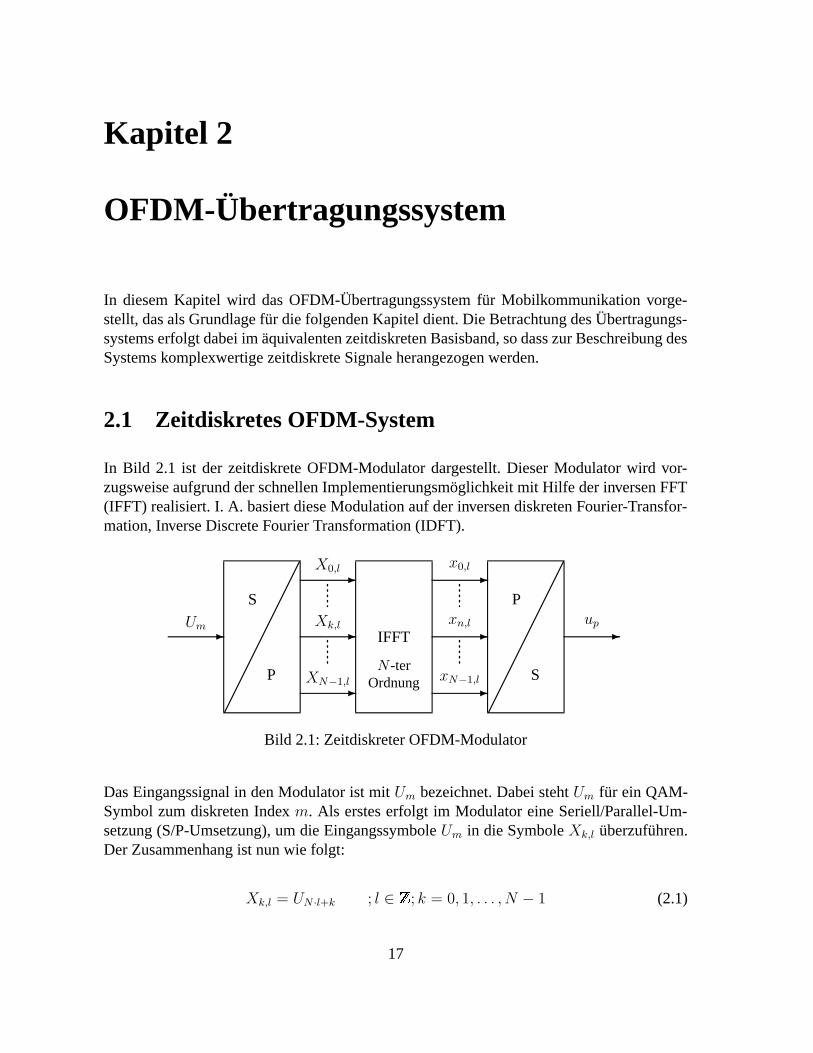
Der zeitdiskrete Demodulator ist in Bild 2.2 dargestellt. Da der Demodulator die inverseOperation zum Modulator durchführt, basiert der Demodulator auf der FFT bzw. i. A. aufder DFT.
-wp
S
P
-y0,l
-yn,l
-yN−1,l
FFT
N -terOrdnung
-Y0,l
-Yk,l
-YN−1,l
P
S
-Wm
Bild 2.2: Zeitdiskreter OFDM-Demodulator
Das Empfangssignal wp wird zuerst einem S/P-Umsetzer zugeführt, um die notwendigeBlockstruktur für die anschließende FFT zu erhalten. Das Eingangssignal yn,l der FFT be-stimmt sich aus dem Empfangssignal wp wie folgt:
yn,l = wN ·l+n ; l ∈ �; n = 0, 1, . . . , N − 1 (2.4)
Das Ausgangssignal Yk,l der FFT in Abhängigkeit des Eingangssignals yn,l lautet:
Yk,l =1√N
N−1∑
n=0
yn,l · e−j2πnk
N (2.5)
18

Nach abschließender P/S-Umsetzung ergeben sich die Empfangssymbole Wm zu:
Wm = Ym Mod N,m Div N ; m ∈ �(2.6)
Werden der OFDM-Modulator und -Demodulator direkt miteinander verbunden, dann giltwp = up. Damit bestimmt sich das Eingangssignal der FFT im Demodulator zu:
yn,l = xn,l (2.7)
Unter Verwendung der Gleichungen (2.2) und (2.7) berechnet sich das Ausgangssignal Yk,l
der FFT mit Hilfe von Gleichung (2.5) zu:
Yk,l =1
N
N−1∑
n=0
N−1∑
h=0
Xh,l · ej2πhn
N · e−j2πnkN =
1
N
N−1∑
h=0
Xh,l
N−1∑
n=0
ej2πn(h−k)
N (2.8)
Mit Hilfe der Beziehung
N−1∑
n=0
ej2πn(h−k)
N = N · δh−k ; k, h = 0, . . . , N − 1 ; δm =
{
1 m = 00 sonst
(2.9)
vereinfacht sich Gleichung (2.8) zu:
Yk,l = Xk,l (2.10)
Daraus folgt Wm = Um, so dass für diesen Fall die empfangenen QAM-Symbole Wm gleichden gesendeten Um sind. Dadurch stellt der OFDM-Demodulator die inverse Operation zumOFDM-Modulator dar. Im Weiteren ist nun zu untersuchen, welche Auswirkungen ein dis-kreter Kanal und zusätzliches Rauschen auf die Empfangssymbole Wm haben, da i. A. derSender und Empfänger nicht direkt miteinander verbunden sind.
Das in Bild 2.1 dargestellte Blockschaltbild des zeitdiskreten OFDM-Modulators ist zu aus-führlich und zu unhandlich für die Einbindung in ein Blockschaltbild eines Gesamtsystems.Deswegen wird zur Vereinfachung das in Bild 2.3 dargestellte Blockschaltbild für den dis-kreten OFDM-Modulator verwendet.
-Xk,l
IFFT -xn,l
Bild 2.3: Zeitdiskreter OFDM-Modulator (vereinfachte Darstellung)
Die Ausführungen zum Blockschaltbild des zeitdiskreten OFDM-Modulators gelten natür-lich in gleicher Weise für den OFDM-Demodulator. Aufgrund dessen wird auch für den
19
-yn,l
FFT -Yk,l
Bild 2.4: Zeitdiskreter OFDM-Demodulator (vereinfachte Darstellung)
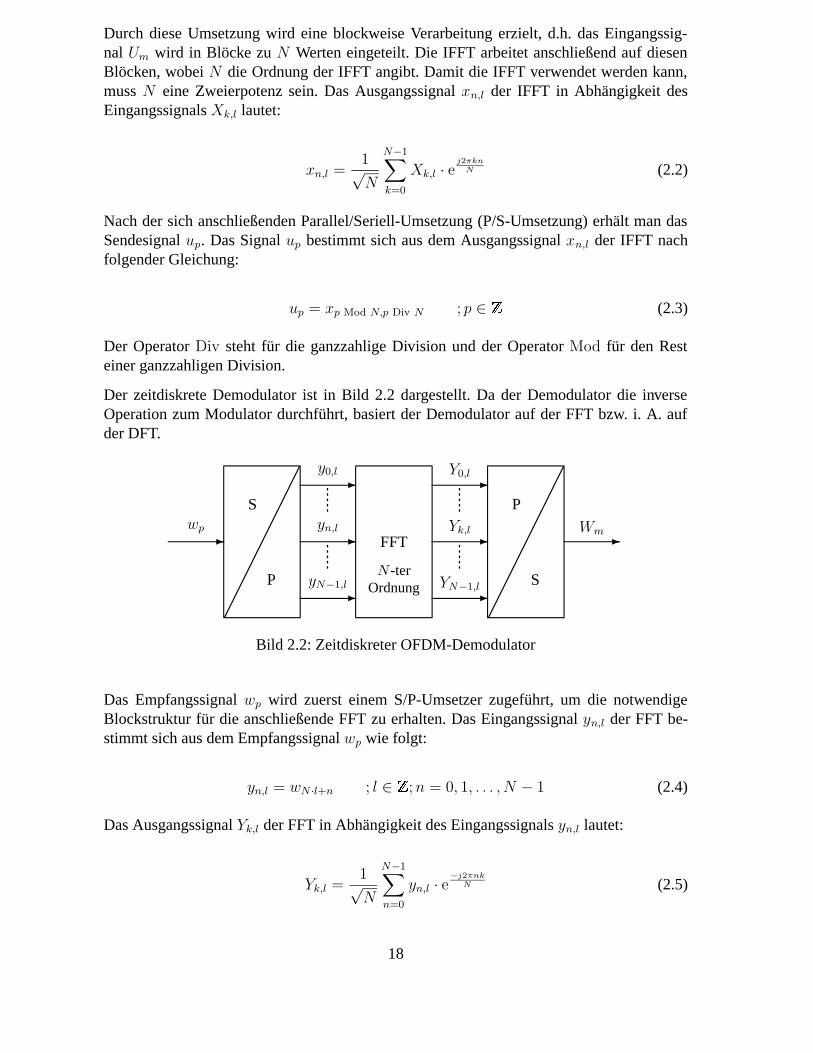
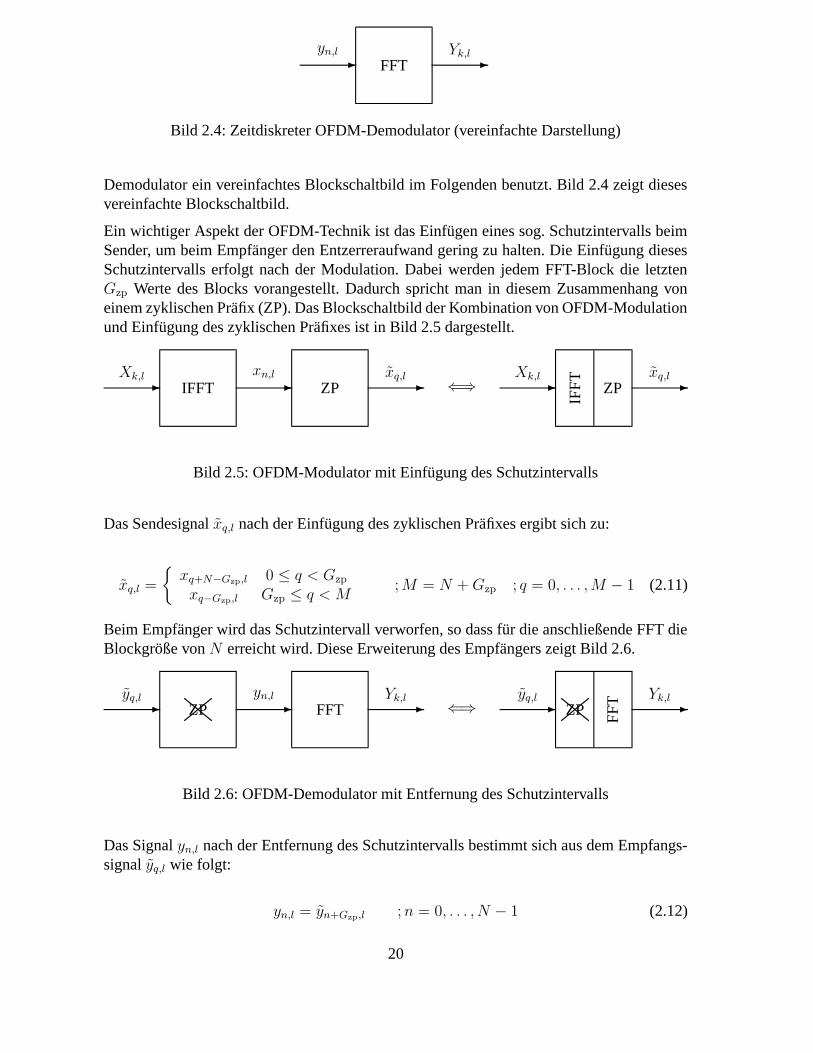
Demodulator ein vereinfachtes Blockschaltbild im Folgenden benutzt. Bild 2.4 zeigt diesesvereinfachte Blockschaltbild.
Ein wichtiger Aspekt der OFDM-Technik ist das Einfügen eines sog. Schutzintervalls beimSender, um beim Empfänger den Entzerreraufwand gering zu halten. Die Einfügung diesesSchutzintervalls erfolgt nach der Modulation. Dabei werden jedem FFT-Block die letztenGzp Werte des Blocks vorangestellt. Dadurch spricht man in diesem Zusammenhang voneinem zyklischen Präfix (ZP). Das Blockschaltbild der Kombination von OFDM-Modulationund Einfügung des zyklischen Präfixes ist in Bild 2.5 dargestellt.
-Xk,l
IFFT -xn,l
ZP -xq,l ⇐⇒ -
Xk,l
IFFT ZP -
xq,l
Bild 2.5: OFDM-Modulator mit Einfügung des Schutzintervalls
Das Sendesignal xq,l nach der Einfügung des zyklischen Präfixes ergibt sich zu:
xq,l =
{
xq+N−Gzp,l 0 ≤ q < Gzp
xq−Gzp,l Gzp ≤ q < M; M = N + Gzp ; q = 0, . . . ,M − 1 (2.11)
Beim Empfänger wird das Schutzintervall verworfen, so dass für die anschließende FFT dieBlockgröße von N erreicht wird. Diese Erweiterung des Empfängers zeigt Bild 2.6.
-yq,l
ZP -yn,l
FFT -Yk,l ⇐⇒ -
yq,l
ZP FFT -
Yk,l
Bild 2.6: OFDM-Demodulator mit Entfernung des Schutzintervalls
Das Signal yn,l nach der Entfernung des Schutzintervalls bestimmt sich aus dem Empfangs-signal yq,l wie folgt:
yn,l = yn+Gzp,l ; n = 0, . . . , N − 1 (2.12)
20
2.2 Mobilfunkkanal
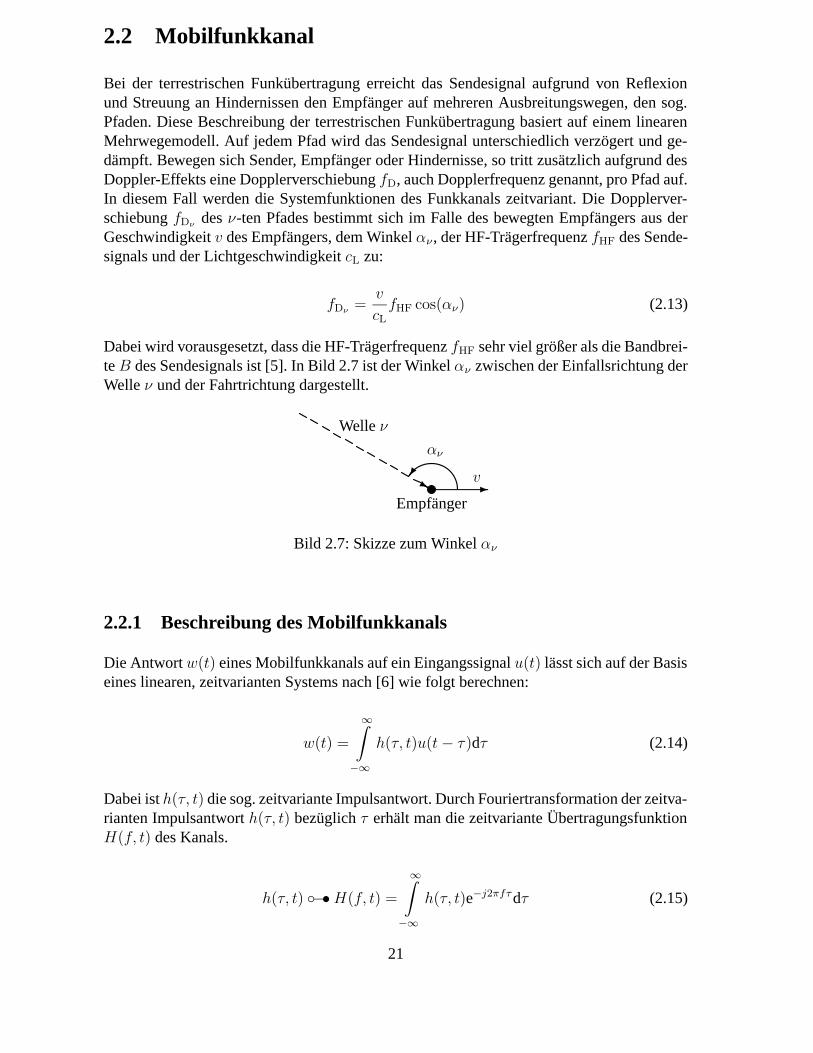
Bei der terrestrischen Funkübertragung erreicht das Sendesignal aufgrund von Reflexionund Streuung an Hindernissen den Empfänger auf mehreren Ausbreitungswegen, den sog.Pfaden. Diese Beschreibung der terrestrischen Funkübertragung basiert auf einem linearenMehrwegemodell. Auf jedem Pfad wird das Sendesignal unterschiedlich verzögert und ge-dämpft. Bewegen sich Sender, Empfänger oder Hindernisse, so tritt zusätzlich aufgrund desDoppler-Effekts eine Dopplerverschiebung fD, auch Dopplerfrequenz genannt, pro Pfad auf.In diesem Fall werden die Systemfunktionen des Funkkanals zeitvariant. Die Dopplerver-schiebung fDν des ν-ten Pfades bestimmt sich im Falle des bewegten Empfängers aus derGeschwindigkeit v des Empfängers, dem Winkel αν , der HF-Trägerfrequenz fHF des Sende-signals und der Lichtgeschwindigkeit cL zu:
fDν =v
cL
fHF cos(αν) (2.13)
Dabei wird vorausgesetzt, dass die HF-Trägerfrequenz fHF sehr viel größer als die Bandbrei-te B des Sendesignals ist [5]. In Bild 2.7 ist der Winkel αν zwischen der Einfallsrichtung derWelle ν und der Fahrtrichtung dargestellt.
j -�
Empfänger
v
αν
Welle ν
Bild 2.7: Skizze zum Winkel αν
2.2.1 Beschreibung des Mobilfunkkanals
Die Antwort w(t) eines Mobilfunkkanals auf ein Eingangssignal u(t) lässt sich auf der Basiseines linearen, zeitvarianten Systems nach [6] wie folgt berechnen:
w(t) =
∞∫
−∞
h(τ, t)u(t− τ)dτ (2.14)
Dabei ist h(τ, t) die sog. zeitvariante Impulsantwort. Durch Fouriertransformation der zeitva-rianten Impulsantwort h(τ, t) bezüglich τ erhält man die zeitvariante ÜbertragungsfunktionH(f, t) des Kanals.
h(τ, t) ◦−•H(f, t) =
∞∫
−∞
h(τ, t)e−j2πfτ dτ (2.15)
21
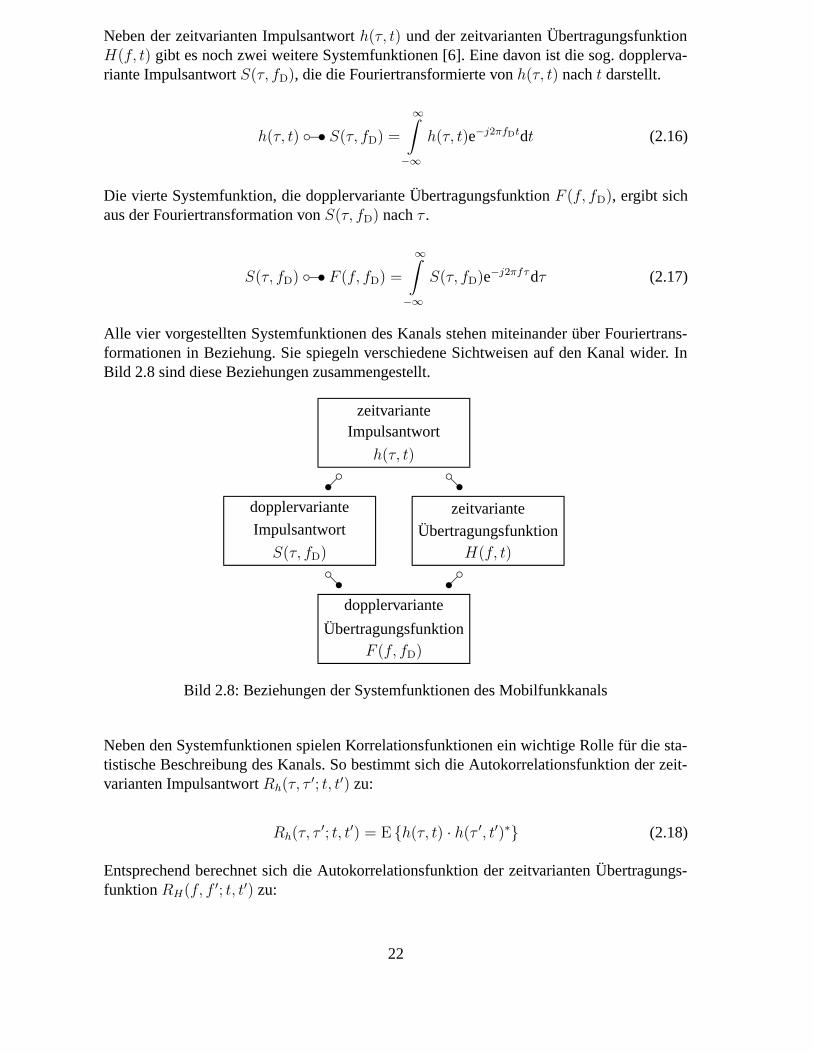
Neben der zeitvarianten Impulsantwort h(τ, t) und der zeitvarianten ÜbertragungsfunktionH(f, t) gibt es noch zwei weitere Systemfunktionen [6]. Eine davon ist die sog. dopplerva-riante Impulsantwort S(τ, fD), die die Fouriertransformierte von h(τ, t) nach t darstellt.
h(τ, t) ◦−• S(τ, fD) =
∞∫
−∞
h(τ, t)e−j2πfDtdt (2.16)
Die vierte Systemfunktion, die dopplervariante Übertragungsfunktion F (f, fD), ergibt sichaus der Fouriertransformation von S(τ, fD) nach τ .
S(τ, fD) ◦−• F (f, fD) =
∞∫
−∞
S(τ, fD)e−j2πfτ dτ (2.17)
Alle vier vorgestellten Systemfunktionen des Kanals stehen miteinander über Fouriertrans-formationen in Beziehung. Sie spiegeln verschiedene Sichtweisen auf den Kanal wider. InBild 2.8 sind diese Beziehungen zusammengestellt.
F (f, fD)
Übertragungsfunktion
dopplervariante
S(τ, fD)
Impulsantwort
dopplervariante
H(f, t)
Übertragungsfunktion
zeitvariante
h(τ, t)
Impulsantwortzeitvariante
•−◦◦−•
◦−• •−◦
Bild 2.8: Beziehungen der Systemfunktionen des Mobilfunkkanals
Neben den Systemfunktionen spielen Korrelationsfunktionen ein wichtige Rolle für die sta-tistische Beschreibung des Kanals. So bestimmt sich die Autokorrelationsfunktion der zeit-varianten Impulsantwort Rh(τ, τ
′; t, t′) zu:
Rh(τ, τ′; t, t′) = E {h(τ, t) · h(τ ′, t′)∗} (2.18)
Entsprechend berechnet sich die Autokorrelationsfunktion der zeitvarianten Übertragungs-funktion RH(f, f ′; t, t′) zu:
22
RH(f, f ′; t, t′) = E {H(f, t) ·H(f ′, t′)∗} (2.19)
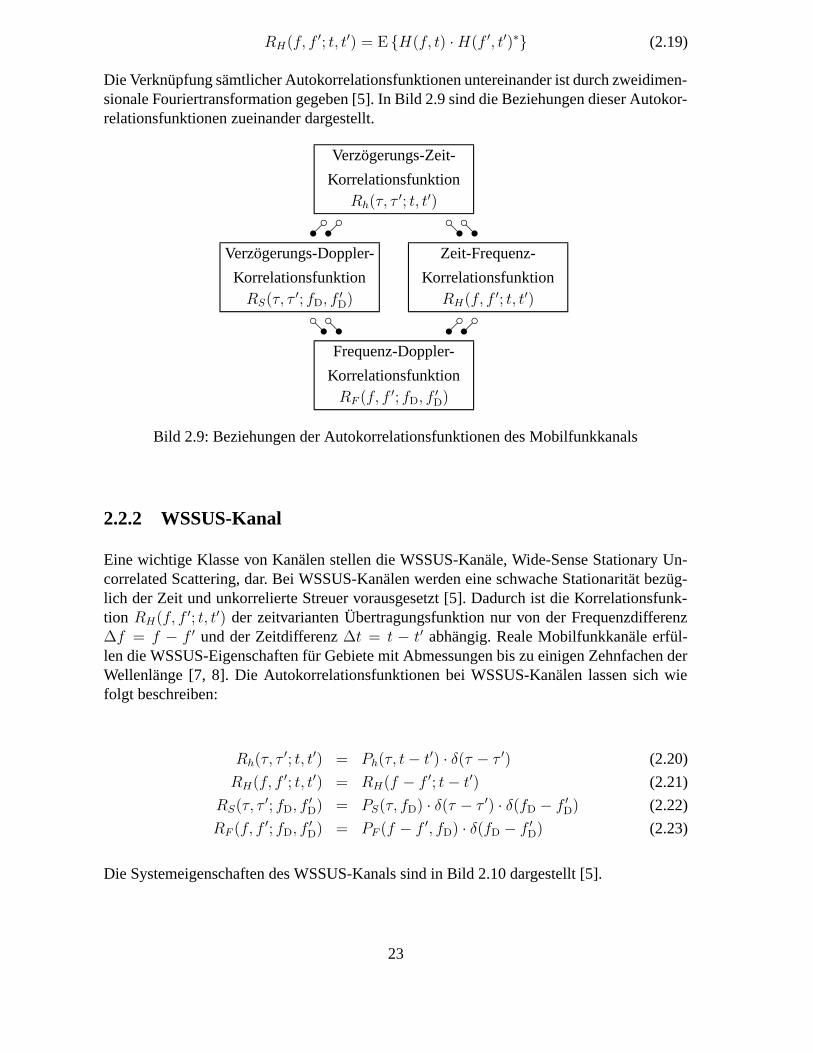
Die Verknüpfung sämtlicher Autokorrelationsfunktionen untereinander ist durch zweidimen-sionale Fouriertransformation gegeben [5]. In Bild 2.9 sind die Beziehungen dieser Autokor-relationsfunktionen zueinander dargestellt.
RF (f, f ′; fD, f ′D)
Korrelationsfunktion
Frequenz-Doppler-
RS(τ, τ ′; fD, f ′D)
Korrelationsfunktion
Verzögerungs-Doppler-
RH(f, f ′; t, t′)
Korrelationsfunktion
Zeit-Frequenz-
Rh(τ, τ′; t, t′)
Korrelationsfunktion
Verzögerungs-Zeit-
•−◦•−◦◦−•◦−•
◦−•◦−• •−◦•−◦
Bild 2.9: Beziehungen der Autokorrelationsfunktionen des Mobilfunkkanals
2.2.2 WSSUS-Kanal
Eine wichtige Klasse von Kanälen stellen die WSSUS-Kanäle, Wide-Sense Stationary Un-correlated Scattering, dar. Bei WSSUS-Kanälen werden eine schwache Stationarität bezüg-lich der Zeit und unkorrelierte Streuer vorausgesetzt [5]. Dadurch ist die Korrelationsfunk-tion RH(f, f ′; t, t′) der zeitvarianten Übertragungsfunktion nur von der Frequenzdifferenz∆f = f − f ′ und der Zeitdifferenz ∆t = t − t′ abhängig. Reale Mobilfunkkanäle erfül-len die WSSUS-Eigenschaften für Gebiete mit Abmessungen bis zu einigen Zehnfachen derWellenlänge [7, 8]. Die Autokorrelationsfunktionen bei WSSUS-Kanälen lassen sich wiefolgt beschreiben:
Rh(τ, τ′; t, t′) = Ph(τ, t− t′) · δ(τ − τ ′) (2.20)
RH(f, f ′; t, t′) = RH(f − f ′; t− t′) (2.21)
RS(τ, τ ′; fD, f ′D) = PS(τ, fD) · δ(τ − τ ′) · δ(fD − f ′
D) (2.22)
RF (f, f ′; fD, f ′D) = PF (f − f ′, fD) · δ(fD − f ′
D) (2.23)
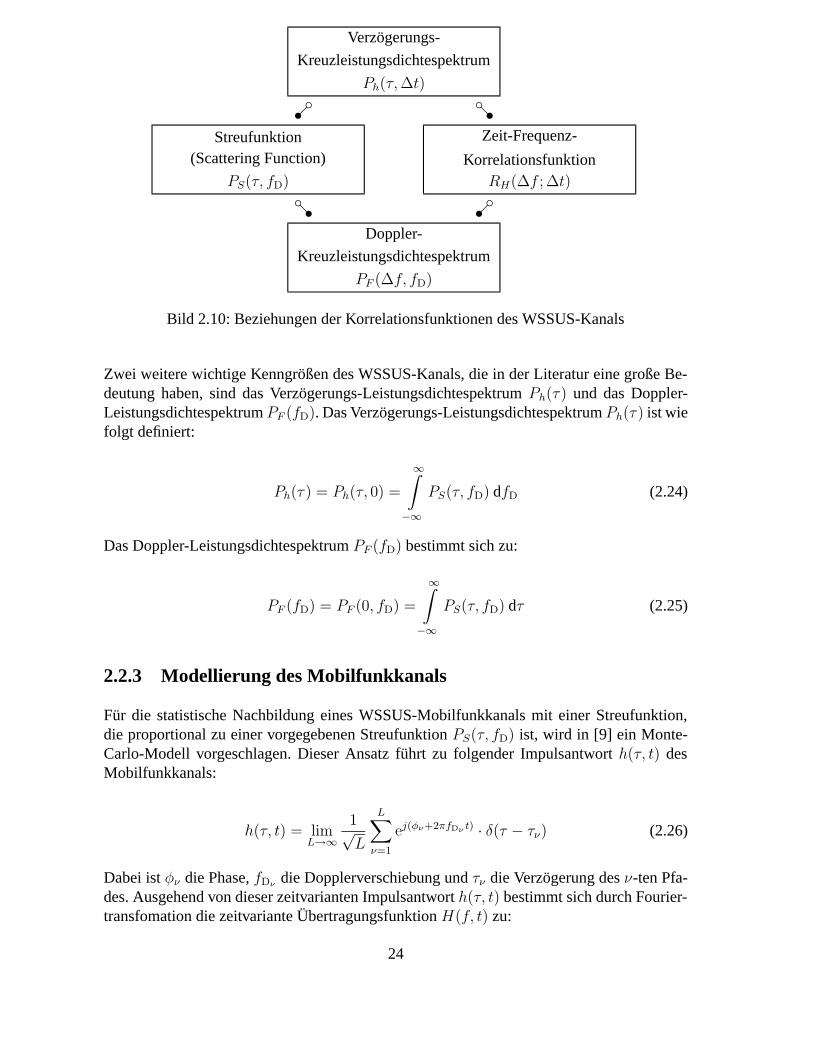
Die Systemeigenschaften des WSSUS-Kanals sind in Bild 2.10 dargestellt [5].
23
PF (∆f, fD)
Kreuzleistungsdichtespektrum
Doppler-
PS(τ, fD)
(Scattering Function)Streufunktion
RH(∆f ; ∆t)
Korrelationsfunktion
Zeit-Frequenz-
Ph(τ, ∆t)
Kreuzleistungsdichtespektrum
Verzögerungs-
•−◦◦−•
◦−• •−◦
Bild 2.10: Beziehungen der Korrelationsfunktionen des WSSUS-Kanals
Zwei weitere wichtige Kenngrößen des WSSUS-Kanals, die in der Literatur eine große Be-deutung haben, sind das Verzögerungs-Leistungsdichtespektrum Ph(τ) und das Doppler-Leistungsdichtespektrum PF (fD). Das Verzögerungs-Leistungsdichtespektrum Ph(τ) ist wiefolgt definiert:
Ph(τ) = Ph(τ, 0) =
∞∫
−∞
PS(τ, fD) dfD (2.24)
Das Doppler-Leistungsdichtespektrum PF (fD) bestimmt sich zu:
PF (fD) = PF (0, fD) =
∞∫
−∞
PS(τ, fD) dτ (2.25)
2.2.3 Modellierung des Mobilfunkkanals
Für die statistische Nachbildung eines WSSUS-Mobilfunkkanals mit einer Streufunktion,die proportional zu einer vorgegebenen Streufunktion PS(τ, fD) ist, wird in [9] ein Monte-Carlo-Modell vorgeschlagen. Dieser Ansatz führt zu folgender Impulsantwort h(τ, t) desMobilfunkkanals:
h(τ, t) = limL→∞
1√L
L∑
ν=1
ej(φν+2πfDν t) · δ(τ − τν) (2.26)
Dabei ist φν die Phase, fDν die Dopplerverschiebung und τν die Verzögerung des ν-ten Pfa-des. Ausgehend von dieser zeitvarianten Impulsantwort h(τ, t) bestimmt sich durch Fourier-transfomation die zeitvariante Übertragungsfunktion H(f, t) zu:
24
H(f, t) = limL→∞
1√L
L∑
ν=1
ej(φν+2πfDν t−2πfτν) (2.27)
Die unabhängigen Zufallsvariablen φν , fDν und τν sollen dabei die folgenden Wahrschein-lichkeitsdichten besitzen:
pτ,fD(τ, fD) =
PS(τ, fD)∞∫
−∞
∞∫
−∞
PS(τ, fD) dτ dfD
(2.28)
pφ(φ) =
{
12π
0 ≤ φ < 2π0 sonst
(2.29)
Durch die Verwendung dieser Kanalmodellierung wird eine Normierung der Zeit-Frequenz-Korrelationsfunktion RH(∆f ; ∆t) des Mobilfunkkanals zu RH(0; 0) = 1 erzielt.
Mit der Voraussetzung, dass das Verzögerungs- und das Doppler-Leistungsdichtespektrumnäherungsweise unabhängig voneinander sind, kann die Verbundwahrscheinlichkeitsdichtepτ,fD
(τ, fD) wie folgt bestimmt werden [9]:
pτ,fD(τ, fD) = pτ (τ) · pfD
(fD) (2.30)
Als Konsequenz aus (2.30) folgt, dass die Zeit-Frequenz-Korrelationsfunktion RH(∆f ; ∆t)als Produkt der Frequenz-Korrelationsfunktion RH,f(∆f) und der Zeit-KorrelationsfunktionRH,t(∆t) geschrieben werden kann [9]:
RH(∆f ; ∆t) = RH,f(∆f) ·RH,t(∆t) (2.31)
RH,f(∆f) =
∞∫
−∞
pτ (τ) · e−j2π∆fτ dτ (2.32)
RH,t(∆t) =
∞∫
−∞
pfD(fD) · ej2πfD∆tdfD (2.33)
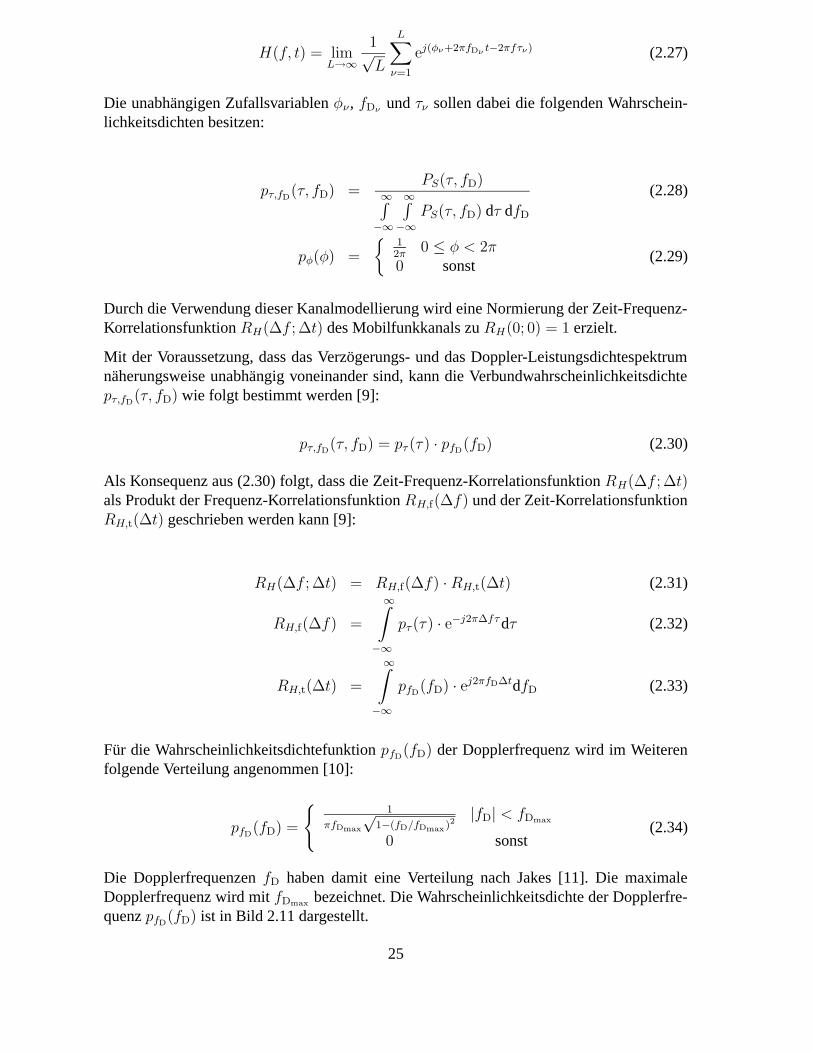
Für die Wahrscheinlichkeitsdichtefunktion pfD(fD) der Dopplerfrequenz wird im Weiteren
folgende Verteilung angenommen [10]:
pfD(fD) =
{
1
πfDmax
√1−(fD/fDmax )2
|fD| < fDmax
0 sonst(2.34)
Die Dopplerfrequenzen fD haben damit eine Verteilung nach Jakes [11]. Die maximaleDopplerfrequenz wird mit fDmax bezeichnet. Die Wahrscheinlichkeitsdichte der Dopplerfre-quenz pfD
(fD) ist in Bild 2.11 dargestellt.
25
0
1
2
3
4
5
−1 −0.6 −0.2 0.2 0.6 1
p fD(f
D)/
p fD(0
)
fD/fDmax
Bild 2.11: Wahrscheinlichkeitsdichtefunktion pfD(fD) der Dopplerfrequenz nach Jakes
Durch Einsetzen von Gleichung (2.34) in Gleichung (2.33) berechnet sich die Zeit-Korrela-tionsfunktion RH,t(∆t) zu:
RH,t(∆t) =
fDmax∫
−fDmax
ej2πfD∆t
πfDmax
√
1− (fD/fDmax)2
dfD = J0 (2πfDmax∆t) (2.35)
Dabei ist J0 die Besselfunktion 0-ter Ordnung.
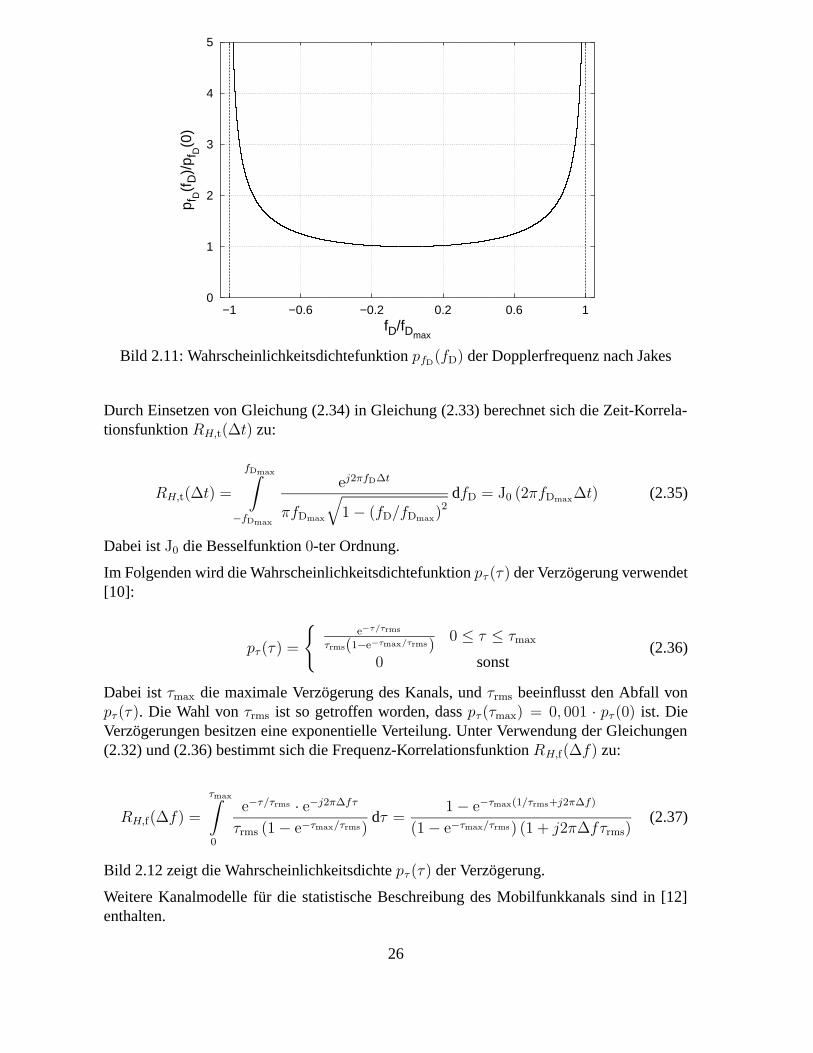
Im Folgenden wird die Wahrscheinlichkeitsdichtefunktion pτ (τ) der Verzögerung verwendet[10]:
pτ (τ) =
{
e−τ/τrms
τrms(1−e−τmax/τrms)0 ≤ τ ≤ τmax
0 sonst(2.36)
Dabei ist τmax die maximale Verzögerung des Kanals, und τrms beeinflusst den Abfall vonpτ (τ). Die Wahl von τrms ist so getroffen worden, dass pτ (τmax) = 0, 001 · pτ (0) ist. DieVerzögerungen besitzen eine exponentielle Verteilung. Unter Verwendung der Gleichungen(2.32) und (2.36) bestimmt sich die Frequenz-Korrelationsfunktion RH,f(∆f) zu:
RH,f(∆f) =
τmax∫
0
e−τ/τrms · e−j2π∆fτ
τrms (1− e−τmax/τrms)dτ =
1− e−τmax(1/τrms+j2π∆f)
(1− e−τmax/τrms) (1 + j2π∆fτrms)(2.37)
Bild 2.12 zeigt die Wahrscheinlichkeitsdichte pτ (τ) der Verzögerung.
Weitere Kanalmodelle für die statistische Beschreibung des Mobilfunkkanals sind in [12]enthalten.
26
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
p τ(τ
)/p τ
(0)
τ/τmax
Bild 2.12: Wahrscheinlichkeitsdichtefunktion pτ (τ) der Verzögerung
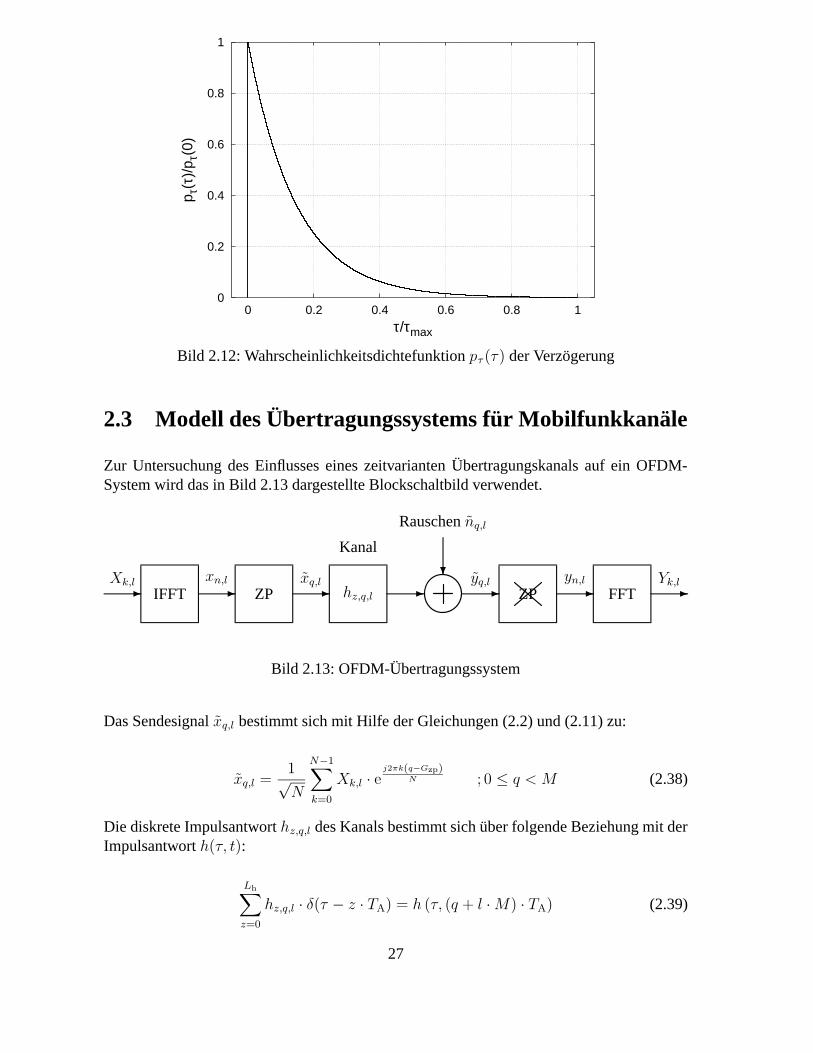
2.3 Modell des Übertragungssystems für Mobilfunkkanäle
Zur Untersuchung des Einflusses eines zeitvarianten Übertragungskanals auf ein OFDM-System wird das in Bild 2.13 dargestellte Blockschaltbild verwendet.
-Xk,l
IFFT -xn,l
ZP -xq,l
hz,q,l
Kanal
-?
Rauschen nq,l
-yq,l
ZP -yn,l
FFT -Yk,l
Bild 2.13: OFDM-Übertragungssystem
Das Sendesignal xq,l bestimmt sich mit Hilfe der Gleichungen (2.2) und (2.11) zu:
xq,l =1√N
N−1∑
k=0
Xk,l · ej2πk(q−Gzp)
N ; 0 ≤ q < M (2.38)
Die diskrete Impulsantwort hz,q,l des Kanals bestimmt sich über folgende Beziehung mit derImpulsantwort h(τ, t):
Lh∑
z=0
hz,q,l · δ(τ − z · TA) = h (τ, (q + l ·M) · TA) (2.39)
27

Dabei ist angenommen worden, dass die Verzögerungen τν der Impulsantwort h(τ, t) desKanals ein ganzzahliges Vielfaches von TA sind.
τν = λν · TA ; λν ∈�
mit τmax = Lh · TA (2.40)
Die Abtastfrequenz des D/A-Umsetzers, der in einem realen System für die Umsetzung derzeitdiskreten Werte des Sendesignals xq,l in ein analoges Signal notwendig ist, beträgt fA =1/TA. Damit ergibt sich die Nutzdauer TU eines OFDM-Symbols zu:
TU = N · TA (2.41)
Die Dauer TG des Schutzintervalls beträgt:
TG = Gzp · TA (2.42)
Die Addition der Nutzdauer TU mit der Dauer TG des Schutzintervalls ergibt die gesamteDauer TS eines OFDM-Symbols.
TS = TU + TG = M · TA (2.43)
Unter Verwendung von Gleichung (2.39) berechnet sich die zugehörige zeitdiskrete und zeit-variante Übertragungsfunktion H (f, (q + l ·M) · TA) des Kanals durch Fouriertransforma-tion zu:
H (f, (q + l ·M) · TA) =
Lh∑
z=0
hz,q,l · e−j2π·f ·z·TA (2.44)
Das Empfangssignal yq,l in Bild 2.13 berechnet sich aus der Faltung des Sendesignals xq,l
und der Kanalimpulsantwort hz,q,l sowie dem zusätzlichen additiven Rauschsignal nq,l zu:
yq,l =
min{q,Lh}∑
z=0
hz,q,l · xq−z,l +
Lh∑
z=min{q,Lh}+1
hz,q,l · xM+q−z,l−1 + nq,l (2.45)
Für Gleichung (2.45) hat man vorausgesetzt, dass die maximale Verzögerung τmax kleiner istals die gesamte Dauer eines OFDM-Symbols TS.
Lh ≤ M (2.46)
Gleichung (2.45) lässt sich mit Hilfe des Kronecker-Symbols δk in folgender Weise schrei-ben:
yq,l =
Lh∑
z=0
hz,q,l · xq−z,l
M−1∑
m=0
δm−(q−z) +
Lh∑
z=0
hz,q,l · xM+q−z,l−1
M−1∑
m=0
δm−(q−z+M) + nq,l (2.47)
28
Nach Entfernung des Schutzintervalls berechnet sich unter Verwendung von (2.12) das Emp-fangssignal yn,l zu:
yn,l =
Lh∑
z=0
hz,Gzp+n,l · xGzp+n−z,l
M−1∑
m=0
δm−(Gzp+n−z)
+
Lh∑
z=0
hz,Gzp+n,l · xM+Gzp+n−z,l−1
M−1∑
m=0
δm−(Gzp+n−z+M) + nn,l (2.48)
Dabei ist nn,l = nn+Gzp,l das additive Rauschsignal.
Aus Gleichung (2.48) ist ersichtlich, dass für Lh < Gzp + 1 der zweite Summenterm indieser Gleichung verschwindet. Damit erhält man keine Symbolinterferenz zwischen zweiaufeinanderfolgenden OFDM-Symbolen (ISI, Inter Symbol Interference), falls die Dauer desSchutzintervalls größer ist als die maximale Verzögerung des Kanals. Damit ergibt sich fürdie Dauer des Schutzintervalls:
Gzp ≥ Lh (2.49)
Gleichung (2.48) vereinfacht sich mit der Voraussetzung aus Gleichung (2.49) zu:
yn,l =
Lh∑
z=0
hz,Gzp+n,l · xGzp+n−z,l
M−1∑
m=0
δm−(Gzp+n−z) + nn,l (2.50)
yn,l =
Lh∑
z=0
hz,Gzp+n,l · xGzp+n−z,l + nn,l (2.51)
Durch Einsetzen von Gleichung (2.38) in Gleichung (2.51) erhält man:
yn,l =1√N
N−1∑
m=0
Xm,l · ej2πmn
N
Lh∑
z=0
hz,Gzp+n,l · e−j2πmz
N + nn,l (2.52)
Das Empfangssignal Yk,l nach der FFT berechnet sich mit Hilfe der Gleichungen (2.5) und(2.52) zu
Yk,l =1
N
N−1∑
m=0
Xm,l · ιk,m,l + Nk,l (2.53)
mit
ιk,m,l =N−1∑
n=0
Lh∑
z=0
hz,Gzp+n,l · ej2πm(n−z)
N · e−j2πnkN (2.54)
29
und
Nk,l =1√N
N−1∑
n=0
nn,l · e−j2πnk
N . (2.55)
Im rauschfreien Fall mit nn,l = 0 vereinfacht sich Gleichung (2.53) zu:
Yk,l =1
N
N−1∑
m=0
Xm,l · ιk,m,l (2.56)
Bei einer Übertragung über einen zeitinvarianten Kanal mit der diskreten Impulsantworthz = hz,0,0 bestimmt sich ιk,m,l zu:
ιk,m,l =
Lh∑
z=0
hz · e−j2πmz
N
N−1∑
n=0
ej2πn(m−k)
N (2.57)
Gleichung (2.57) ist nur für den Fall m = k ungleich Null. Somit berechnet sich Yk,l bei derÜbertragung über einen zeitinvarianten Kanal zu:
Yk,l = Xk,l
Lh∑
z=0
hz · e−j2πkz
N (2.58)
Mit Hilfe von Gleichung (2.44) und Hk = H (k · fU, 0) sowie fU = 1/ (N · TA) ergibt sichschließlich:
Yk,l = Xk,l ·H (k/TU, 0) = Xk,l ·H (k · fU, 0) = Xk,l ·Hk (2.59)
Damit ist nun die physikalische Bedeutung des Indexes k zu erkennen. Die zu sendendenQAM-Symbole Xk,l werden auf sog. Unterträger unterschiedlicher äquidistanter Frequenzenfk = k · fU moduliert. Diese Träger haben einen Frequenzabstand, den sog. Unterträgerab-stand, von fU = 1/TU. Bei der Übertragung über einen zeitinvarianten Kanal werden diegesendeten QAM-Symbole Xk,l mit jeweils einem Koeffizienten Hk der Kanalübertragungs-funktion H(f, 0) gewichtet. Dadurch ist beim Empfänger eine einfache Entzerrerstrukturmöglich. Außerdem tritt keine Nachbarkanalbeeinflussung, Inter Carrier Interference (ICI),auf.
Der Aspekt, dass keine ICI auftritt, ist im Falle der Übertragung über einen zeitvariantenKanal nicht mehr gegeben. Aus Gleichung (2.56) lässt sich Yk,l entsprechend
Yk,l = χk,l + κk,l (2.60)
mit
30
χk,l =1
N·Xk,l · ιk,k,l (2.61)
und
κk,l =1
N
N−1∑
m=0m6=k
Xm,l · ιk,m,l (2.62)
darstellen. Von Interesse sind nun der Erwartungswert von χk,l ·χ∗k,l und der Erwartungswert
von κk,l · κ∗k,l. Der Erwartungswert von χk,l · χ∗k,l berechnet sich zu:
E{
χk,l · χ∗k,l
} (2.61)= E
{
1
N2·Xk,l ·X∗
k,l · ιk,k,l · ι∗k,k,l
}
=ES
N2
N−1∑
n=0
N−1∑
n=0
Lh∑
z=0
Lh∑
z=0
E{
hz,Gzp+n,l · h∗z,Gzp+n,l
}
e−j2πk(z−z)
N (2.63)
Dabei ist die Beziehung für die mittlere Signalenergie ES = E{
Xk,l ·X∗k,l
}
und die Unab-hängigkeit von Xk,l und ιk,k,l verwendet worden. Nach Gleichung (2.20) gilt bei WSSUS-Kanälen:
E{
hz,Gzp+n,l · h∗z,Gzp+n,l
}
= Ph (z, n− n) · δz−z (2.64)
Gleichung (2.63) vereinfacht sich mit Hilfe von Gleichung (2.64) zu:
E{
χk,l · χ∗k,l
}
=ES
N2
N−1∑
n=0
N−1∑
n=0
Lh∑
z=0
Ph (z, n− n)
=ES
N2
(
N
Lh∑
z=0
Ph (z, 0) + 2N−1∑
∆n=1
(N −∆n)
Lh∑
z=0
R{Ph (z, ∆n)})
(2.65)
Es ist zu bemerken, dass das Verzögerungs-Kreuzleistungsdichtespektrum Ph(τ, ∆t) konju-giert symmetrisch ist, da die Streufunktion PS(τ, fD) reell ist. Mit R{z} ist der Realteil vonz bezeichnet. Entsprechend zur Bestimmung von E
{
χk,l · χ∗k,l
}
berechnet sich E{
κk,l · κ∗k,l
}
unter Verwendung der statistischen Unabhängigkeit der gesendeten Symbole Xk,l mit
E{
Xk,l ·X∗k,l
}
= ES · δk−k · δl−l (2.66)
zu:
31

E{
κk,l · κ∗k,l
}
=ES
N2
N−1∑
m=0m6=k
(
N
Lh∑
z=0
Ph (z, 0)
+2N−1∑
∆n=1
(N −∆n)
Lh∑
z=0
R{
Ph (z, ∆n) ej2π∆n(m−k)
N
}
)
(2.67)
Unter Verwendung der NormierungLh∑
z=0
Ph (z, 0) = 1 des Mobilfunkkanals, die unmittelbar
aus Gleichung (2.28) folgt, bestimmt sich die Summe dieser beiden Erwartungswerte zu:
E{
χk,l · χ∗k,l
}
+ E{
κk,l · κ∗k,l
}
= ES (2.68)
Mit Hilfe der Gleichungen (2.65) und (2.68) ergibt sich der Erwartungswert der ICI-Störungzu:
E{
κk,l · κ∗k,l
}
= ES −ES
N2
(
N + 2N−1∑
∆n=1
(N −∆n)
Lh∑
z=0
R{Ph (z, ∆n)})
(2.69)
Für das hier betrachtete Kanalmodell berechnet sichLh∑
z=0
R{Ph (z, ∆n)} zu:
Lh∑
z=0
R{Ph (z, ∆n)} = J0 (2π∆nfDmaxTA) (2.70)
Setzt man nun Gleichung (2.70) in Gleichung (2.69) ein, so erhält man schließlich für denErwartungswert der ICI-Störung [13]:
E{
κk,l · κ∗k,l
}
= ES −ES
N2
(
N + 2N−1∑
∆n=1
(N −∆n) · J0 (2π∆nfDmaxTA)
)
(2.71)
Bei konstantem TA und N nimmt der Erwartungswert der ICI-Störung zu, wenn die ma-ximale Dopplerfrequenz fDmax steigt [13]. Dies liegt daran, dass sich durch eine steigendemaximale Dopplerfrequenz fDmax der Mobilfunkkanal zeitlich schneller ändert. Erhöht manN bei konstantem TA und konstanter maximaler Dopplerfrequenz fDmax , so vergrößert sichder Erwartungswert der ICI-Störung ebenfalls [13]. In diesem Fall wird durch Erhöhung vonN die Nutzdauer eines OFDM-Symbols vergrößert. Dadurch erfährt ein längeres OFDM-Symbol eine größere zeitliche Änderung des Kanals.
Die erhaltenen Ergebnisse für die beiden Erwartungswerte können dazu verwendet werden,die Symbolfehlerhäufigkeit aufgrund der Zeitvarianz des Kanals näherungsweise zu berech-nen [13, 14]. Der Einfluss anderer Kanalmodelle bzw. Dopplerleistungsdichtespektren aufden Erwartungswert der ICI-Störung findet sich u. a. in [15, 16]. In [16, 17] werden für denErwartungswert der ICI-Störung Näherungsformeln hergeleitet.
Vernachlässigt man den ICI-Störterm1 in Gleichung (2.60), so berechnet sich das Empfangs-1Gedanklich kann der ICI-Störterm dem additiven Rauschen zugeordnet werden.
32

signal Yk,l mit Hilfe von Gleichung (2.44) unter Berücksichtigung des Rauschens Nk,l zu:
Yk,l =Xk,l
N
N−1∑
n=0
H (k · fU, (Gzp + n + l ·M) · TA) + Nk,l (2.72)
Ist die zeitliche Änderung des Kanals während der Dauer TS eines OFDM-Symbols klein, sogilt näherungsweise:
H (k · fU, (Gzp + n + l ·M) · TA) ≈ H (k · fU, (Gzp + N/2 + l ·M) · TA) (2.73)
Durch Einsetzen von Gleichung (2.73) in Gleichung (2.72) erhält man die Näherung:
Yk,l = Xk,l ·H (k · fU, (Gzp + N/2 + l ·M) · TA) + Nk,l (2.74)
Unter Verwendung der Gleichungen (2.41), (2.42) und (2.43) bestimmt sich das Empfangs-signal Yk,l schließlich zu:
Yk,l = Xk,l ·Hk,l + Nk,l mit Hk,l = H (k · fU, TG + TU/2 + l · TS) (2.75)
Im Weiteren wird für die Modellierung eines OFDM-Übertragungssystems über einen zeit-varianten Kanal Gleichung (2.75) verwendet. Die gesendeten QAM-Symbole Xk,l werdenin diesem Fall mit einem Kanalübertragungskoeffizienten Hk,l gewichtet, der sich nicht nurüber der Frequenz, sondern auch über der Zeit verändert. Die QAM-Symbole werden kohä-rent auf die einzelnen Unterträger moduliert. Dadurch ist es für die Detektion beim Emp-fänger notwendig, dass der Kanalübertragungskoeffizient Hk,l beim Empfänger bekannt ist.Aufgrund dessen muss im Empfänger eine Kanalschätzung erfolgen, die diesen Koeffizien-ten schätzt.
Für das Rauschen wird im Weiteren angenommen, dass es sich um ein additives, mittel-wertfreies weißes Gaußsches Rauschen handelt, wobei Real- und Imaginärteil unabhängigvoneinander sind. Die Wahrscheinlichkeitsdichte pN des additiven Rauschens Nk,l in Glei-chung (2.75) berechnet sich zu [18, 19]:
pN(Nk,l) =1
2πσ2N
· e−
|Nk,l|2
2σ2N mit E
{
Nk,l ·N∗k,l
}
= N0 · δk−k · δl−l ; N0 = 2σ2N (2.76)
2.4 OFDM-System für Mobilkommunikation
Aufgrund der unterschiedlichen Empfangsbedingungen bei der Mobilkommunikation ist esüblich, die zu sendenden Daten unter Verwendung von Codierern, sog. Kanalcodierern, zuschützen. Dabei wird den Daten Redundanz hinzugefügt, die dem Empfänger eine Fehler-korrektur ermöglicht. Um die Leistungsfähigkeit der Fehlerkorrektur zu erhöhen, werden
33
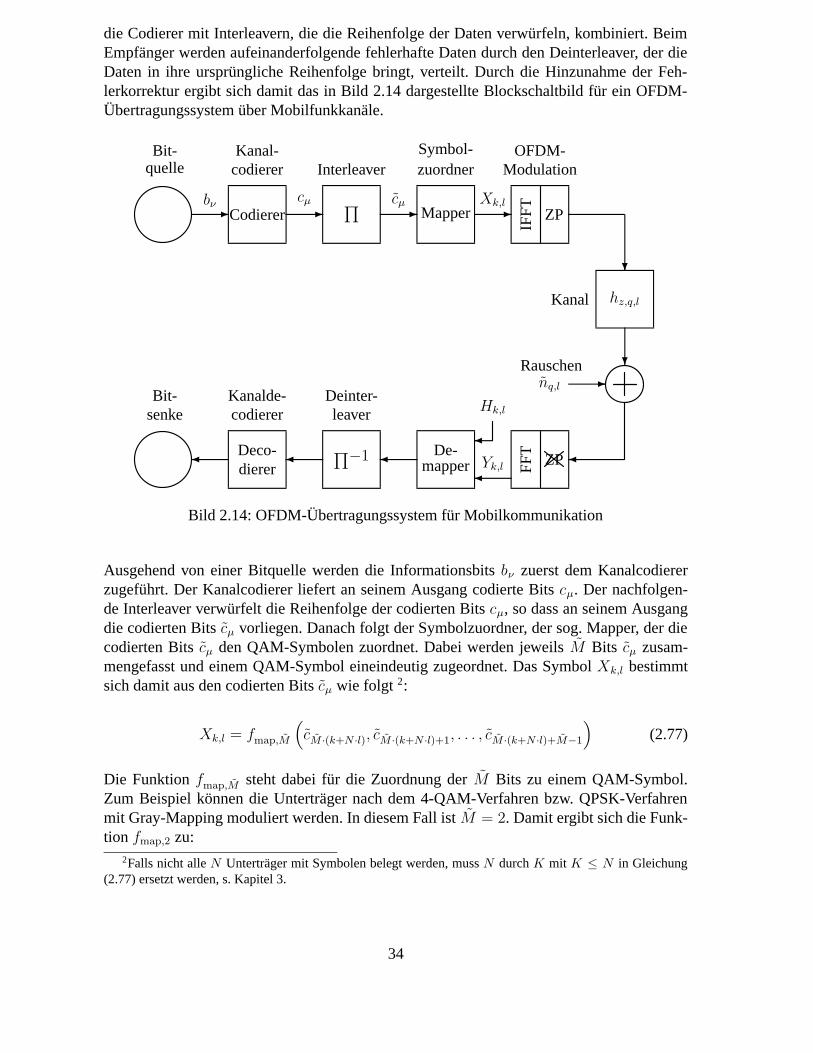
die Codierer mit Interleavern, die die Reihenfolge der Daten verwürfeln, kombiniert. BeimEmpfänger werden aufeinanderfolgende fehlerhafte Daten durch den Deinterleaver, der dieDaten in ihre ursprüngliche Reihenfolge bringt, verteilt. Durch die Hinzunahme der Feh-lerkorrektur ergibt sich damit das in Bild 2.14 dargestellte Blockschaltbild für ein OFDM-Übertragungssystem über Mobilfunkkanäle.
Bit-quelle
-bν
Codierer
Kanal-codierer
-cµ
Π
Interleaver
-cµ
Mapper
Symbol-zuordner
-Xk,l
IFFT ZP
OFDM-Modulation
?
hz,q,lKanal
?-nq,l
Rauschen
�
FFT
ZP�Yk,l
�
Hk,l
De-mapper
�Π−1
Deinter-leaver
�Deco-dierer
Kanalde-codierer
�
Bit-senke
Bild 2.14: OFDM-Übertragungssystem für Mobilkommunikation
Ausgehend von einer Bitquelle werden die Informationsbits bν zuerst dem Kanalcodiererzugeführt. Der Kanalcodierer liefert an seinem Ausgang codierte Bits cµ. Der nachfolgen-de Interleaver verwürfelt die Reihenfolge der codierten Bits cµ, so dass an seinem Ausgangdie codierten Bits cµ vorliegen. Danach folgt der Symbolzuordner, der sog. Mapper, der diecodierten Bits cµ den QAM-Symbolen zuordnet. Dabei werden jeweils M Bits cµ zusam-mengefasst und einem QAM-Symbol eineindeutig zugeordnet. Das Symbol Xk,l bestimmtsich damit aus den codierten Bits cµ wie folgt 2:
Xk,l = fmap,M
(
cM ·(k+N ·l), cM ·(k+N ·l)+1, . . . , cM ·(k+N ·l)+M−1
)
(2.77)
Die Funktion fmap,M steht dabei für die Zuordnung der M Bits zu einem QAM-Symbol.Zum Beispiel können die Unterträger nach dem 4-QAM-Verfahren bzw. QPSK-Verfahrenmit Gray-Mapping moduliert werden. In diesem Fall ist M = 2. Damit ergibt sich die Funk-tion fmap,2 zu:
2Falls nicht alle N Unterträger mit Symbolen belegt werden, muss N durch K mit K ≤ N in Gleichung(2.77) ersetzt werden, s. Kapitel 3.
34
fmap,2 (0, 0) = −1− j
fmap,2 (1, 0) = −1 + j
fmap,2 (0, 1) = +1− j
fmap,2 (1, 1) = +1 + j (2.78)
Der letzte Block des Senders ist die OFDM-Modulation mit dem Einfügen des Schutzinter-valls. An die OFDM-Modulation schließt sich der Übertragungskanal an, bevor das Signalzum Empfänger gelangt. Im Empfänger werden prinzipiell die gleichen Blöcke in umge-kehrter Reihenfolge zum Sender durchlaufen. Dabei führen die einzelnen Blöcke die inverseOperation im Vergleich zum Sender durch. Auf die einzelnen Blöcke des Empfängers wirdin den folgenden Kapiteln an entsprechender Stelle näher eingegangen.
35

36
Kapitel 3
Kanalschätzung mit Interpolationsfiltern
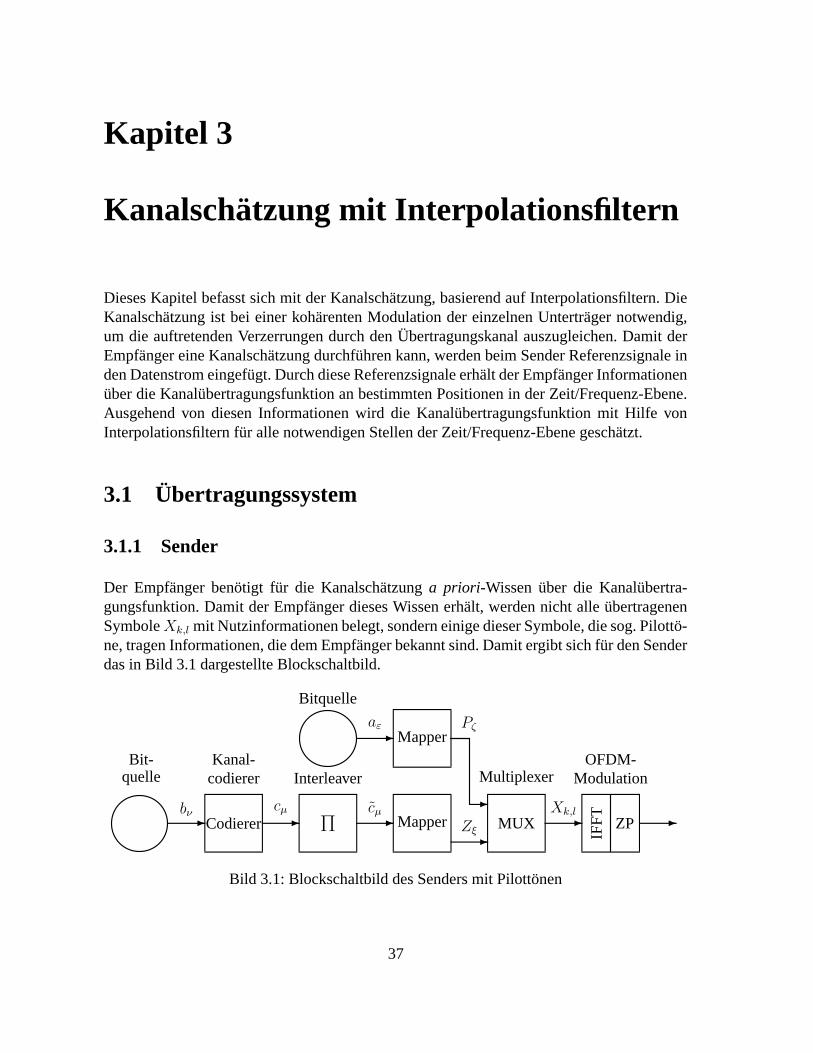
Dieses Kapitel befasst sich mit der Kanalschätzung, basierend auf Interpolationsfiltern. DieKanalschätzung ist bei einer kohärenten Modulation der einzelnen Unterträger notwendig,um die auftretenden Verzerrungen durch den Übertragungskanal auszugleichen. Damit derEmpfänger eine Kanalschätzung durchführen kann, werden beim Sender Referenzsignale inden Datenstrom eingefügt. Durch diese Referenzsignale erhält der Empfänger Informationenüber die Kanalübertragungsfunktion an bestimmten Positionen in der Zeit/Frequenz-Ebene.Ausgehend von diesen Informationen wird die Kanalübertragungsfunktion mit Hilfe vonInterpolationsfiltern für alle notwendigen Stellen der Zeit/Frequenz-Ebene geschätzt.
3.1 Übertragungssystem
3.1.1 Sender
Der Empfänger benötigt für die Kanalschätzung a priori-Wissen über die Kanalübertra-gungsfunktion. Damit der Empfänger dieses Wissen erhält, werden nicht alle übertragenenSymbole Xk,l mit Nutzinformationen belegt, sondern einige dieser Symbole, die sog. Pilottö-ne, tragen Informationen, die dem Empfänger bekannt sind. Damit ergibt sich für den Senderdas in Bild 3.1 dargestellte Blockschaltbild.
Bit-quelle
-bν
Codierer
Kanal-codierer
-cµ
Π
Interleaver
-cµ
Mapper-
Zξ MUX
Multiplexer
-Xk,l
IFFT ZP
OFDM-Modulation
-
Bitquelle
-aε
MapperPζ
-
Bild 3.1: Blockschaltbild des Senders mit Pilottönen
37
Die Symbole Zξ tragen die Nutzinformationen und bestimmen sich entsprechend Gleichung(2.77) zu:
Zξ = fmap,M
(
cM ·ξ, cM ·ξ+1, . . . , cM ·ξ+M−1
)
(3.1)
Von einer zweiten Bitquelle werden die Pilotbits aε erzeugt. Diese Bits werden ebenfallseinem Mapper zugeführt, um die Pilotsymbole Pζ zu erhalten.
Pζ = fmap,M
(
aM ·ζ , aM ·ζ+1, . . . , aM ·ζ+M−1
)
(3.2)
Nach den Symbolzuordnern werden die beiden Signale im Multiplexer zusammengeführt,um das Signal Xk,l zu bilden. Die Zusammenführung erfolgt nach einem bestimmten Pi-lotraster.
3.1.2 Pilotraster
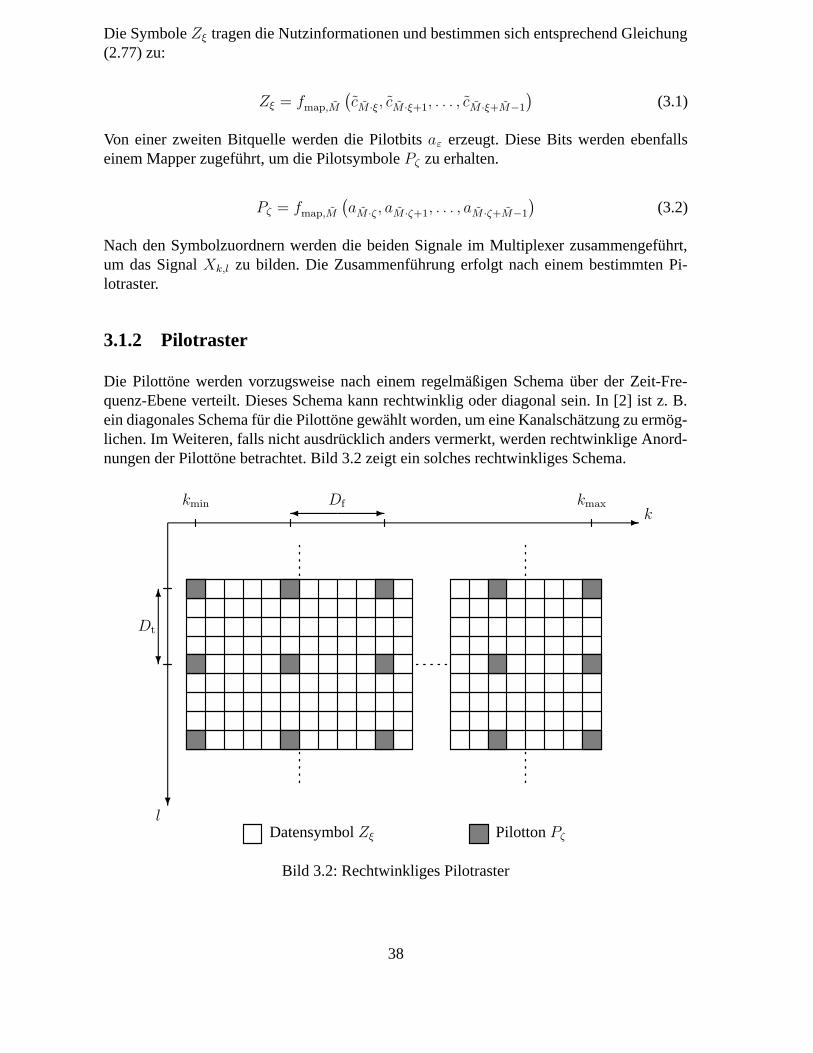
Die Pilottöne werden vorzugsweise nach einem regelmäßigen Schema über der Zeit-Fre-quenz-Ebene verteilt. Dieses Schema kann rechtwinklig oder diagonal sein. In [2] ist z. B.ein diagonales Schema für die Pilottöne gewählt worden, um eine Kanalschätzung zu ermög-lichen. Im Weiteren, falls nicht ausdrücklich anders vermerkt, werden rechtwinklige Anord-nungen der Pilottöne betrachtet. Bild 3.2 zeigt ein solches rechtwinkliges Schema.
Datensymbol Zξ Pilotton Pζ
?l
- k
6
?
Dt
� -Dfkmin kmax
Bild 3.2: Rechtwinkliges Pilotraster
38
Der diskrete Abstand der Pilottöne in Zeitrichtung beträgt Dt. Für die Frequenzrichtung istdieser Abstand mit Df gekennzeichnet. Die Anzahl der belegten Unterträger bestimmt sichzu:
K = kmax − kmin + 1 ≤ N (3.3)
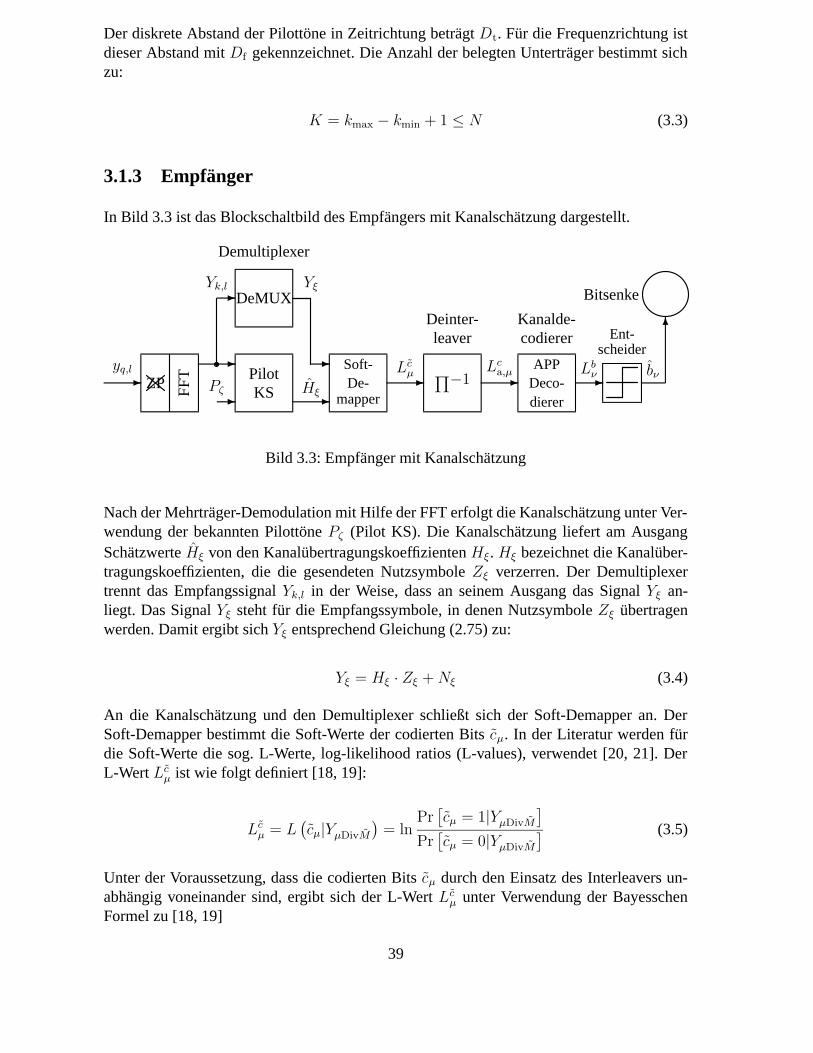
3.1.3 Empfänger
In Bild 3.3 ist das Blockschaltbild des Empfängers mit Kanalschätzung dargestellt.
-yq,l
ZP FFT
-
-Pζ
PilotKS
-Yk,l
DeMUX
Demultiplexer
-
Yξ
-Hξ
Soft-De-
mapper
-Lc
µ
Π−1
Deinter-leaver
-Lc
a,µAPP
Deco-dierer
Kanalde-codierer
-Lb
ν
Ent-scheider
bν
6
Bitsenke
Bild 3.3: Empfänger mit Kanalschätzung
Nach der Mehrträger-Demodulation mit Hilfe der FFT erfolgt die Kanalschätzung unter Ver-wendung der bekannten Pilottöne Pζ (Pilot KS). Die Kanalschätzung liefert am AusgangSchätzwerte Hξ von den Kanalübertragungskoeffizienten Hξ. Hξ bezeichnet die Kanalüber-tragungskoeffizienten, die die gesendeten Nutzsymbole Zξ verzerren. Der Demultiplexertrennt das Empfangssignal Yk,l in der Weise, dass an seinem Ausgang das Signal Yξ an-liegt. Das Signal Yξ steht für die Empfangssymbole, in denen Nutzsymbole Zξ übertragenwerden. Damit ergibt sich Yξ entsprechend Gleichung (2.75) zu:
Yξ = Hξ · Zξ + Nξ (3.4)
An die Kanalschätzung und den Demultiplexer schließt sich der Soft-Demapper an. DerSoft-Demapper bestimmt die Soft-Werte der codierten Bits cµ. In der Literatur werden fürdie Soft-Werte die sog. L-Werte, log-likelihood ratios (L-values), verwendet [20, 21]. DerL-Wert Lc
µ ist wie folgt definiert [18, 19]:
Lcµ = L
(
cµ|YµDivM
)
= lnPr[
cµ = 1|YµDivM
]
Pr[
cµ = 0|YµDivM
] (3.5)
Unter der Voraussetzung, dass die codierten Bits cµ durch den Einsatz des Interleavers un-abhängig voneinander sind, ergibt sich der L-Wert Lc
µ unter Verwendung der BayesschenFormel zu [18, 19]
39
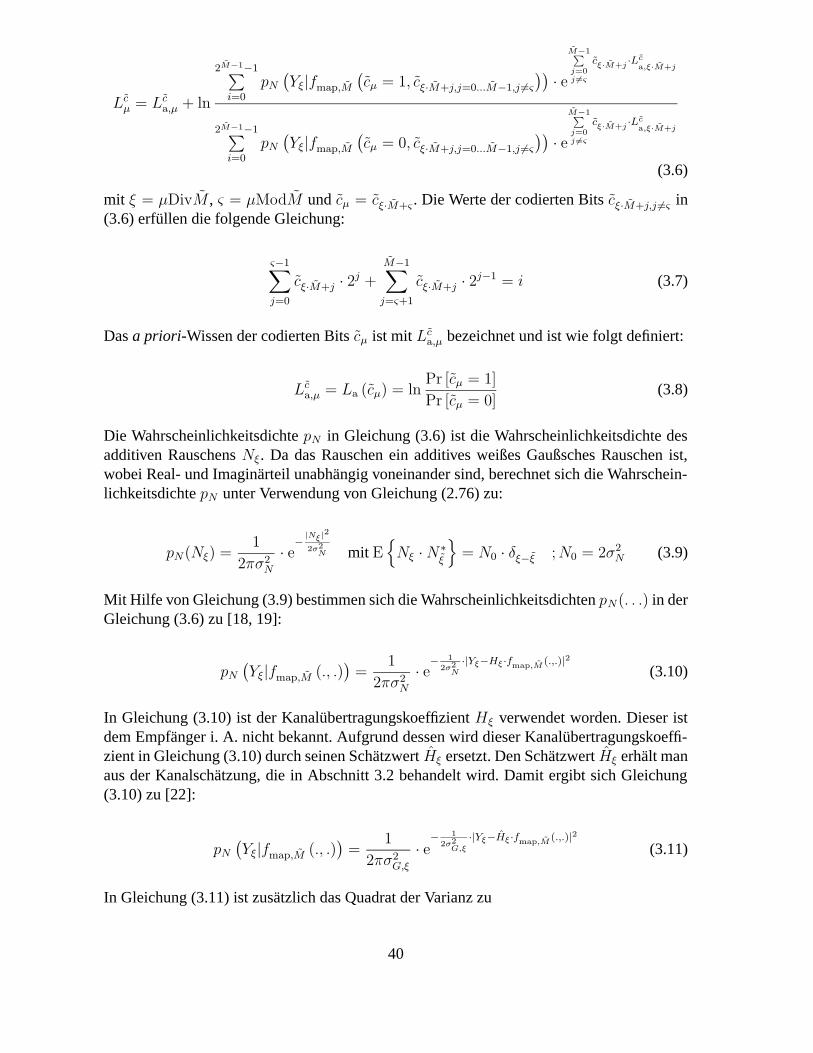
Lcµ = Lc
a,µ + ln
2M−1−1∑
i=0
pN
(
Yξ|fmap,M
(
cµ = 1, cξ·M+j,j=0...M−1,j 6=ς
))
· e
M−1∑
j=0j 6=ς
cξ·M+j ·Lca,ξ·M+j
2M−1−1∑
i=0
pN
(
Yξ|fmap,M
(
cµ = 0, cξ·M+j,j=0...M−1,j 6=ς
))
· e
M−1∑
j=0j 6=ς
cξ·M+j ·Lca,ξ·M+j
(3.6)
mit ξ = µDivM , ς = µModM und cµ = cξ·M+ς . Die Werte der codierten Bits cξ·M+j,j 6=ς in(3.6) erfüllen die folgende Gleichung:
ς−1∑
j=0
cξ·M+j · 2j +M−1∑
j=ς+1
cξ·M+j · 2j−1 = i (3.7)
Das a priori-Wissen der codierten Bits cµ ist mit Lca,µ bezeichnet und ist wie folgt definiert:
Lca,µ = La (cµ) = ln
Pr [cµ = 1]
Pr [cµ = 0](3.8)
Die Wahrscheinlichkeitsdichte pN in Gleichung (3.6) ist die Wahrscheinlichkeitsdichte desadditiven Rauschens Nξ. Da das Rauschen ein additives weißes Gaußsches Rauschen ist,wobei Real- und Imaginärteil unabhängig voneinander sind, berechnet sich die Wahrschein-lichkeitsdichte pN unter Verwendung von Gleichung (2.76) zu:
pN(Nξ) =1
2πσ2N
· e−
|Nξ|2
2σ2N mit E
{
Nξ ·N∗ξ
}
= N0 · δξ−ξ ; N0 = 2σ2N (3.9)
Mit Hilfe von Gleichung (3.9) bestimmen sich die Wahrscheinlichkeitsdichten pN(. . .) in derGleichung (3.6) zu [18, 19]:
pN
(
Yξ|fmap,M (., .))
=1
2πσ2N
· e− 1
2σ2N
·|Yξ−Hξ·fmap,M (.,.)|2
(3.10)
In Gleichung (3.10) ist der Kanalübertragungskoeffizient Hξ verwendet worden. Dieser istdem Empfänger i. A. nicht bekannt. Aufgrund dessen wird dieser Kanalübertragungskoeffi-zient in Gleichung (3.10) durch seinen Schätzwert Hξ ersetzt. Den Schätzwert Hξ erhält manaus der Kanalschätzung, die in Abschnitt 3.2 behandelt wird. Damit ergibt sich Gleichung(3.10) zu [22]:
pN
(
Yξ|fmap,M (., .))
=1
2πσ2G,ξ
· e− 1
2σ2G,ξ
·|Yξ−Hξ·fmap,M (.,.)|2
(3.11)
In Gleichung (3.11) ist zusätzlich das Quadrat der Varianz zu
40

2σ2G,ξ = 2σ2
N + Jξ · ES (3.12)
verändert worden, wobei Jξ = E
{
∣
∣
∣Hξ − Hξ
∣
∣
∣
2}
der mittlere quadratische Schätzfehler ist.
Diese Veränderung ist ersichtlich, wenn der Erwartungswert E
{
∣
∣
∣Yξ − Hξ · Zξ
∣
∣
∣
2}
mit Zξ
entsprechend Gleichung (3.1) betrachtet wird.
E
{
∣
∣
∣Yξ − Hξ · Zξ
∣
∣
∣
2}
= E
{
∣
∣
∣(Hξ − Hξ) · Zξ
∣
∣
∣
2}
+ E{
|Nξ|2}
= Jξ · ES + 2σ2N (3.13)
Dabei ist vorausgesetzt worden, dass sowohl Hξ, Zξ und Nξ als auch Hξ, Zξ und Nξ unab-hängig voneinander sind. Unter Verwendung von Gleichung (3.11) können die L-Werte inGleichung (3.6) bestimmt werden.
Unter der Voraussetzung, dass kein a priori-Wissen der codierten Bits cµ vorhanden ist,ergibt sich für das Beispiel der QPSK aus Kapitel 2 der L-Wert Lc
µ des ersten der beiden Bits(µMod2 = 0), die in einem QPSK-Symbol übertragen werden, zu [18]:
Lcµ = ln
pN (Yξ|fmap,2 (1, 0)) + pN (Yξ|fmap,2 (1, 1))
pN (Yξ|fmap,2 (0, 0)) + pN (Yξ|fmap,2 (0, 1))(3.14)
Der L-Wert Lcµ des zweiten Bits (µMod2 = 1) bestimmt sich in ähnlicher Weise zu:
Lcµ = ln
pN (Yξ|fmap,2 (0, 1)) + pN (Yξ|fmap,2 (1, 1))
pN (Yξ|fmap,2 (0, 0)) + pN (Yξ|fmap,2 (1, 0))(3.15)
Die L-Werte Lcµ am Ausgang des Soft-Demappers werden dem Deinterleaver zugeführt.
Die erhaltenen L-Werte Lca,µ am Ausgang des Deinterleavers werden dem Soft-in/Soft-out-
Decodierer übergeben. Dieser Decodierer verwendet den APP-Algorithmus [23, 20]. APPsteht für a posteriori probability. Der APP-Decodierer liefert an seinem Ausgang die L-WerteLb
ν der Informationsbits. Diese L-Werte werden nach dem Entscheider zu den empfangenenInformationsbits bν , die schließlich der Bitsenke zugeführt werden. Der Entscheider bewertetdabei L-Werte, die größer als Null sind, als binäre 1 und L-Werte, die kleiner als Null sind,als binäre 0. Dieses Entscheidungskriterium folgt unmittelbar aus Gleichung (3.8).
3.2 Kanalschätzung
Für die Kanalschätzung werden im Empfänger zuerst die Pilottöne ausgewertet, da diesebekannt sind. An den Pilotstellen bestimmt sich der Kanalübertragungskoeffizient durch Di-vision von dem Empfangssymbol und dem Pilot-Symbol unter Verwendung von Gleichung(2.75) zu:
41
Hk,l = Hk,l +Nk,l
Xk,l
= Hk,l + Nk,l mit Nk,l =Nk,l
Xk,l
(3.16)
In Gleichung (3.16) bezeichnet {k, l} die Position eines Pilottons. Das Ergebnis liefert dieSumme aus dem tatsächlichen Kanalübertragungskoeffizienten Hk,l und dem Störterm Nk,l.Unter der Voraussetzung, dass Nk,l und Xk,l unabhängig sind, berechnet sich der Erwar-tungswert dieses Störterms zu:
E{
Nk,l · N∗k′,l′
}
= E{
Nk,l ·N∗k′,l′
}
· E{
1
Xk,l
· 1
X∗k′,l′
}
= N0 · β · δk−k′ · δl−l′ (3.17)
Dabei steht β für:
β = E
{
1
Xk,l
· 1
X∗k,l
}
(3.18)
Die Aufgabe der Kanalschätzung ist es nun, ausgehend von den Stützstellen Hk,l in Glei-chung (3.16), die Kanalübertragungskoeffizienten Hk,l für die gesamte Zeit/Frequenz-Ebenezu schätzen. Dieses stellt ein zweidimensionales Interpolationsproblem dar.
3.2.1 Interpolationsfilter
Diese zweidimensionale Interpolation könnte mit zweidimensionalen Filtern realisiert wer-den. Aus Komplexitäts- und Realisierungsgründen hat sich in der Literatur jedoch durchge-setzt, dass man zweimal eine eindimensionale Interpolation durchführt [3, 14, 24, 25]. DerUnterschied zwischen der zweidimensionalen Filterung und der zweimaligen eindimensio-nalen Filterung ist sehr gering [26, 27, 28]. Aus diesem Grund stellt die Interpolation, ba-sierend auf zweimaliger eindimensionaler Filterung, einen guten Kompromiss dar. Im Wei-teren wird nun die zweimalige eindimensionale Filterung betrachtet. Da hier nur rechtwink-lige Pilotraster betrachtet werden, ist es willkürlich, in welche Richtung zuerst interpoliertwird [26, 27, 28]. Bei diagonalen Pilotrastern kann dies jedoch eine wichtige Rolle spie-len [29]. Im Folgenden wird zuerst in Frequenzrichtung interpoliert und anschließend inZeitrichtung. Die erhaltenen Gleichungen für diesen Fall können sehr einfach an den Fall,dass zuerst in Zeitrichtung und anschließend in Frequenzrichtung interpoliert wird, angepasstwerden.
Betrachtet man ein OFDM-Symbol zum Zeitpunkt l0, in dem Pilottöne übertragen werden,so werden die Kanalübertragungskoeffizienten H ′
k,l0unter Verwendung von Gleichung (3.16)
durch lineare Interpolation wie folgt bestimmt1:
H ′k,l0
=P∑
m=1
wm,k · Hkm,l0 (3.19)
1Da rechtwinklige Pilotraster verwendet werden, entfällt der Zeitindex l0 bei den Filterkoeffizienten wm,k.
42
Dabei sind die Positionen der P nächsten Pilotstellen zur betrachteten Position {k, l0} mit{km, l0} bezeichnet. Die Pilotstellen müssen folgende Beziehung erfüllen:
(km − kmin) ModDf = 0 ; m = 1, . . . , P (3.20)
Die Filterkoeffizienten in Gleichung (3.19) sollen so bestimmt werden, dass der Erwartungs-
wert E{
|Hk,l0 − H ′k,l0|2}
des quadratischen Fehlers minimiert wird. Die Filterkoeffizienten,
die diese Vorgabe erfüllen, berechnen sich zu [30]:
wTk = r
THH,k
·R−1
HH(3.21)
Dabei beinhaltet der Vektor rHH,k die Kreuzkorrelation zwischen Hk,l0 und Hkm,l0 und die
Matrix RHH die Autokorrelation von Hkm,l0 . Der Vektor wk enthält die Filterkoeffizientenwm,k wie folgt:
wTk = (w1,k, . . . , wP,k) (3.22)
Der Erwartungswert von Hk,l0 und Hkm,l0 bestimmt sich mit Hilfe von Gleichung (2.31)und unter den Voraussetzungen, dass Hk,l und Nk,l unabhängig voneinander sind und derMittelwertsfreiheit von Nk,l, zu:
E{
Hk,l0 · H∗km,l0
}
= RH,f ((k − km) · fU) ·RH,t(0) = RH,f ((k − km) · fU) (3.23)
Damit ergibt sich der Vektor rHH,k der Kreuzkorrelation zwischen Hk,l0 und Hkm,l0 zu2:
rTHH,k
= (RH,f (k − k1) , . . . , RH,f (k − kP )) (3.24)
Die Frequenz-Korrelationsfunktion RH,f in Gleichung (3.24) bestimmt sich mit Hilfe vonGleichung (2.37) zu:
RH,f(k − km) =1− e−τmax(1/τrms+j2π(k−km)fU)
(1− e−τmax/τrms) (1 + j2π (k − km) fUτrms)(3.25)
Der Erwartungswert von Hkm,l0 · H∗km,l0
berechnet sich mit Hilfe der Gleichungen (2.31),(3.16), (3.17) und (3.25) zu:
E{
Hkm,l0 · H∗km,l0
}
= RH,f (km − km) ·RH,t(0) + N0 · β · δkm−km; m, m = 1, . . . , P
(3.26)
Unter Verwendung von Gleichung (3.26) berechnet sich die Matrix RHH in Gleichung (3.21)zu:
2Zur Vereinfachung und ohne Verminderung des Verständnisses ist der nötige multiplikative Faktor fU indem Argument der Frequenz-Korrelationsfunktion RH,f in Gleichung (3.24) weggelassen worden.
43
RHH =
1 + N0 · β RH,f (k1 − k2) · · · RH,f (k1 − kP )RH,f (k2 − k1) 1 + N0 · β RH,f (k2 − kP )
.... . .
...RH,f (kP − k1) · · · RH,f (kP − kP−1) 1 + N0 · β
(3.27)
Erfüllen die Filterkoeffizienten wm,k Gleichung (3.21), so erhält man für den minimalen
quadratischen Fehler E{
|Hk,l0 − H ′k,l0|2}
Folgendes [30]:
E{
|Hk,l0 − H ′k,l0|2}
= Jminf ,k = 1− rTHH,k
·R−1
HH· r∗
HH,k(3.28)
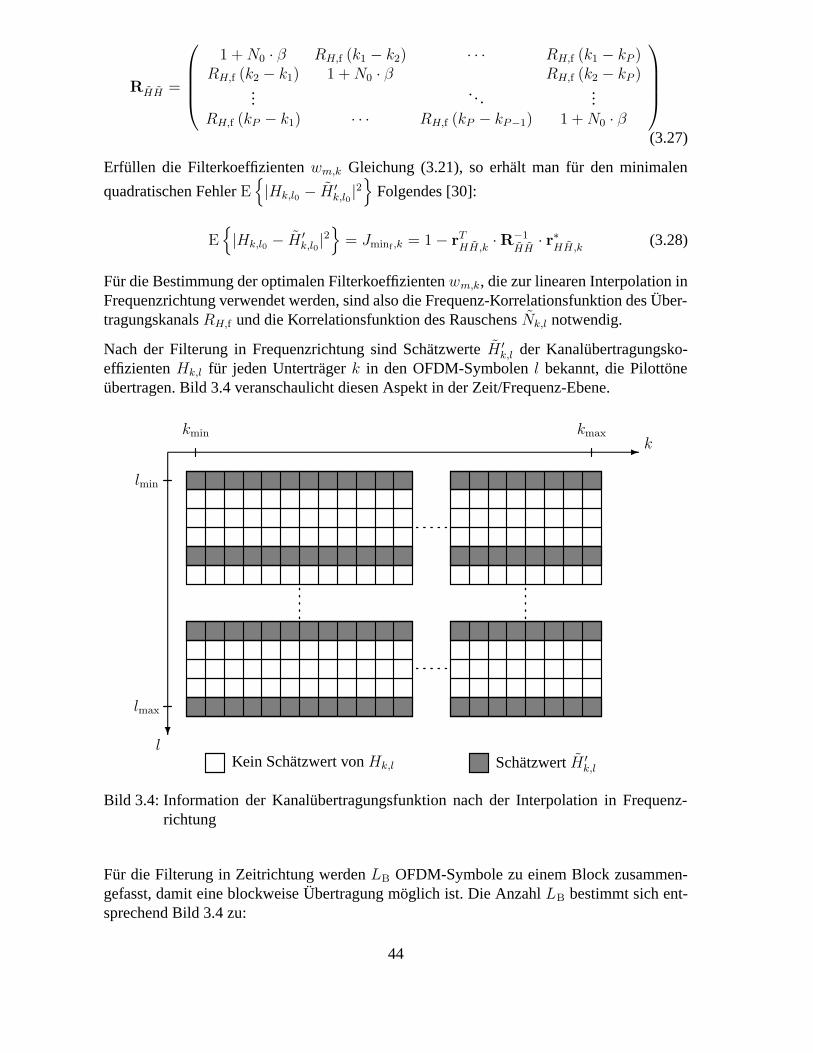
Für die Bestimmung der optimalen Filterkoeffizienten wm,k, die zur linearen Interpolation inFrequenzrichtung verwendet werden, sind also die Frequenz-Korrelationsfunktion des Über-tragungskanals RH,f und die Korrelationsfunktion des Rauschens Nk,l notwendig.
Nach der Filterung in Frequenzrichtung sind Schätzwerte H ′k,l der Kanalübertragungsko-
effizienten Hk,l für jeden Unterträger k in den OFDM-Symbolen l bekannt, die Pilottöneübertragen. Bild 3.4 veranschaulicht diesen Aspekt in der Zeit/Frequenz-Ebene.
Kein Schätzwert von Hk,l Schätzwert H ′k,l
?l
- kkmin kmax
lmin
lmax
Bild 3.4: Information der Kanalübertragungsfunktion nach der Interpolation in Frequenz-richtung
Für die Filterung in Zeitrichtung werden LB OFDM-Symbole zu einem Block zusammen-gefasst, damit eine blockweise Übertragung möglich ist. Die Anzahl LB bestimmt sich ent-sprechend Bild 3.4 zu:
44

LB = lmax − lmin + 1 (3.29)
Betrachtet man einen Unterträger k0, so erfolgt die lineare Interpolation in Zeitrichtung wiefolgt:
Hk0,l =
Q∑
m=1
vm,k0,l · H ′k0,lm (3.30)
Dabei sind die Positionen der Q nächsten Schätzwerte H ′k0,lm
zur betrachteten Position{k0, l} mit {k0, lm} bezeichnet. Diese Stellen müssen folgende Beziehung erfüllen:
(lm − lmin) ModDt = 0 ; m = 1, . . . , Q (3.31)
Die optimalen Filterkoeffizienten ergeben sich entsprechend Gleichung (3.21) zu:
vTl = r
THH′,l
·R−1
H′H′ (3.32)
Der Vektor vl stellt sich dabei wie folgt dar:
vTl = (v1,k0,l, . . . , vQ,k0,l) (3.33)
Der Erwartungswert von Hk0,l und H ′k0,lm
, der für den Vektor rHH′,l notwendig ist, berechnetsich mit Hilfe von Gleichung (3.19) zu:
E{
Hk0,l ·(
H ′k0,lm
)∗}
= E
{
Hk0,l ·P∑
n=1
(
wn,k0 · Hkn,lm
)∗}
=P∑
n=1
w∗n,k0
E{
Hk0,l · H∗kn,lm
}
(2.31)= RH,t ((l − lm) · TS) ·
P∑
n=1
w∗n,k0
·RH,f ((k0 − kn) · fU)
(3.24)= RH,t ((l − lm) · TS) ·
(
rTHH,k0
·w∗k0
)
(3.34)
Unter Verwendung der Gleichungen (3.21), (3.28) und dem Wissen, dass RHH eine hermit-sche Matrix ist, folgt für diesen Erwartungswert:
E{
Hk0,l ·(
H ′k0,lm
)∗}
= RH,t ((l − lm) · TS) · (1− Jminf ,k0) (3.35)
Für den Vektor rHH′,l der Kreuzkorrelation zwischen Hk0,l und H ′k0,lm
folgt somit3:3Zur Vereinfachung und ohne Verminderung des Verständnisses ist der nötige multiplikative Faktor TS in
dem Argument der Zeit-Korrelationsfunktion RH,t in Gleichung (3.36) weggelassen worden.
45
rTHH′,l
= (1− Jminf ,k0) · (RH,t (l − l1) , . . . , RH,t (l − lQ)) (3.36)
Die Zeit-Korrelationsfunktion RH,t in Gleichung (3.36) bestimmt sich mit Hilfe von Glei-chung (2.35) zu:
RH,t (l − lm) = J0 (2πfDmax (l − lm) TS) (3.37)
Der Erwartungswert von H ′k0,lm
und H ′k0,lm
berechnet sich mit Hilfe von Gleichung (3.19)zu:
E{
H ′k0,lm ·
(
H ′k0,lm
)∗}
= E
{
P∑
n=1
wn,k0 · Hkn,lm ·P∑
i=1
(
wi,k0 · Hki,lm
)∗}
(3.38)
Gleichung (3.38) läßt sich wie folgt umformen:
E{
H ′k0,lm ·
(
H ′k0,lm
)∗}
=P∑
n=1
P∑
i=1
wn,k0 · w∗i,k0
· E{
Hkn,lm ·(
Hki,lm
)∗}
(3.39)
Mit
E{
Hkn,lm ·(
Hki,lm
)∗}
= RH,f (kn − ki) ·RH,t(lm − lm) + N0 · β · δkn−ki· δlm−lm (3.40)
entsprechend Gleichung (3.26) bestimmt sich der Erwartungswert in (3.39) zu:
E{
H ′k0,lm ·
(
H ′k0,lm
)∗}
= RH,t(lm − lm) ·P∑
n=1
P∑
i=1
wn,k0 · w∗i,k0
·RH,f (kn − ki)
+N0 · β · δlm−lm ·P∑
n=1
wn,k0 · w∗n,k0
(3.41)
Gleichung (3.41) lässt sich wie folgt umschreiben:
E{
H ′k0,lm ·
(
H ′k0,lm
)∗}
= RH,t(lm − lm) ·P∑
n=1
P∑
i=1
wn,k0 · w∗i,k0
· (RH,f (kn − ki)
+N0 · β · δkn−ki)
−RH,t(lm − lm) ·P∑
n=1
P∑
i=1
wn,k0 · w∗i,k0
·N0 · β · δkn−ki
+N0 · β · δlm−lm ·P∑
n=1
wn,k0 · w∗n,k0
(3.42)
46
Unter Verwendung der Gleichungen (3.22) und (3.27) vereinfacht sich die Schreibweise fürGleichung (3.42) zu:
E{
H ′k0,lm ·
(
H ′k0,lm
)∗}
= RH,t(lm − lm) ·(
wTk0·RHH ·w∗
k0
)
−RH,t(lm − lm) ·N0 · β ·(
wTk0·w∗
k0
)
+N0 · β · δlm−lm ·(
wTk0·w∗
k0
)
(3.43)
Mit Hilfe der Gleichungen (3.21), (3.34) und (3.35) ergibt sich schließlich:
E{
H ′k0,lm ·
(
H ′k0,lm
)∗}
= RH,t (lm − lm) · (1− Jminf ,k0)
+N0 · β ·(
wTk0·w∗
k0
)
· (δlm−lm −RH,t(lm − lm)) (3.44)
Unter Verwendung von Gleichung (3.44) berechnet sich die Matrix RH′H′ in Gleichung(3.32) zu:
RH′H′ =
1− Jminf ,k0 RH,t (l1 − l2) · Jw· · · RH,t (l1 − lQ) · J
w
RH,t (l2 − l1) · Jw1− Jminf ,k0 RH,t (l2 − lQ) · J
w
.... . .
...RH,t (lQ − l1) · Jw
RH,t (lQ − l2) · Jw· · · 1− Jminf ,k0
(3.45)
mit
Jw
= 1− Jminf ,k0 −N0 · β ·(
wTk0·w∗
k0
)
(3.46)
Erfüllen die Filterkoeffizienten vm,k0,l Gleichung (3.32), so erhält man für den minimalen
quadratischen Fehler E{
|Hk0,l − Hk0,l|2}
Folgendes [30]:
E{
|Hk0,l − Hk0,l|2}
= Jmin,k0,l = 1−rTHH′,l
·R−1
H′H′ ·r∗HH′,lmit kmin ≤ k0 ≤ kmax (3.47)
Zur Verifikation dieser Gleichung wird der analytisch berechnete quadratische Fehler mseana
dem quadratischen Fehler msesim aus einer Simulation gegenübergestellt. Der analytisch be-stimmte quadratische Fehler berechnet sich mit Hilfe von Gleichung (3.47) zu:
mseana =1
LB ·K
lmax∑
l=lmin
kmax∑
k=kmin
Jmin,k,l (3.48)
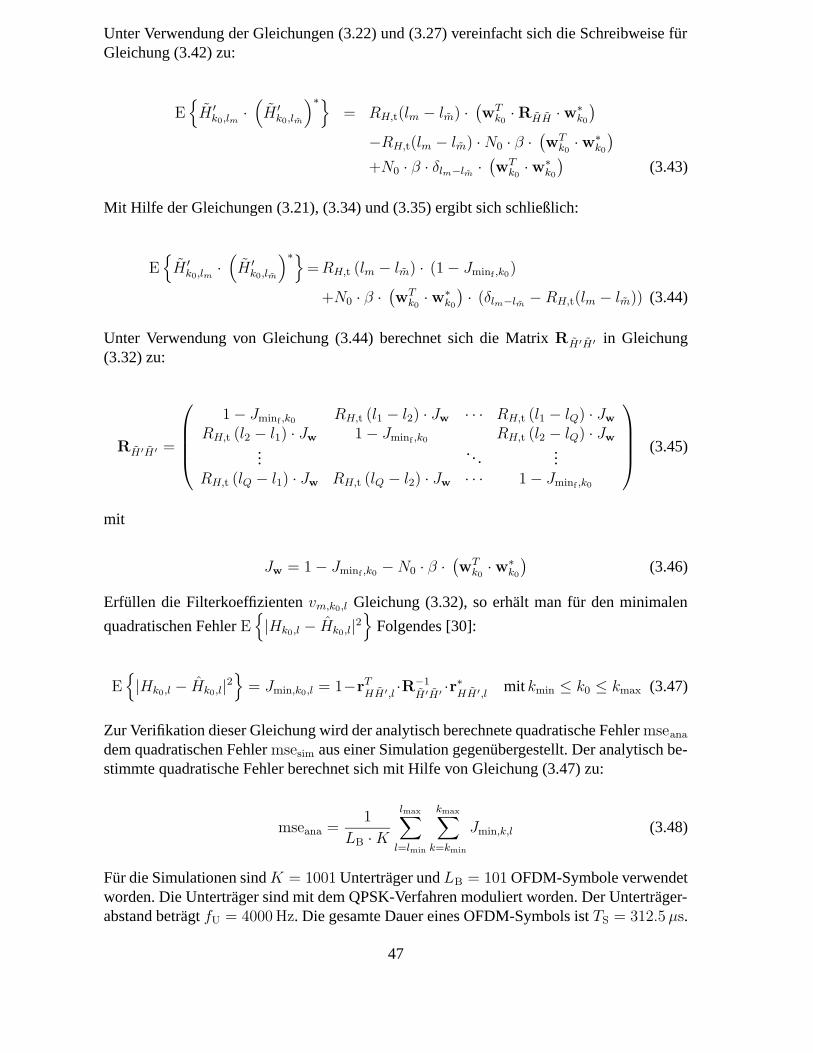
Für die Simulationen sind K = 1001 Unterträger und LB = 101 OFDM-Symbole verwendetworden. Die Unterträger sind mit dem QPSK-Verfahren moduliert worden. Der Unterträger-abstand beträgt fU = 4000 Hz. Die gesamte Dauer eines OFDM-Symbols ist TS = 312.5 µs.
47
Damit ergibt sich eine Schutzintervalldauer von TG = 62.5µs. Diese Parameter der Mehrträ-germodulation OFDM sind ähnlich zu DVB-T [2]. Der Abstand der Pilottöne ist sowohl fürdie Frequenzrichtung als auch für die Zeitrichtung zu Df = Dt = 10 gewählt worden. DieAnzahl an Stützstellen P,Q für die Kanalschätzung in Frequenz- und Zeitrichtung ist variiertworden. Dabei wurden die Werte P = Q = 3, 5, 7 ausgewählt. Die Simulationsparameterfür den Übertragungskanal sind eine maximale Dopplerfrequenz von fDmax = 100 Hz undeine maximale Verzögerung von τmax = 20 µs. Für die Monte-Carlo-Simulation des Kanalssind L = 200 Pfade verwendet worden.
Der quadratische Fehler msesim aus der Simulation ist aus BL = 50 Blöcken mit K =1001 Unterträgern und LB = 101 OFDM-Symbolen bestimmt worden. Damit berechnetsich dieser quadratische Fehler zu:
msesim =1
BL · LB ·K
BL−1∑
n=0
lmax∑
l=lmin
kmax∑
k=kmin
|Hk,l+n·LB− Hk,l+n·LB
|2 (3.49)
In Bild 3.5 sind die quadratischen Fehler mseana und msesim über ES/N0 für die verschiede-nen Werte P,Q aufgetragen.
0.001
0.01
0.1
1
0 2 4 6 8 10 12 14 16 18 20
mse
Es/N0 [dB]
msesim, P=Q=3
msesim, P=Q=5
msesim, P=Q=7
mseana, P=Q=3
mseana, P=Q=5
mseana, P=Q=7
Bild 3.5: Vergleich der mittleren quadratischen Fehler aus analytischer Berechnung und Si-mulation
Der Vergleich der beiden quadratischen Fehler zeigt eine sehr gute Übereinstimmung, wo-durch die Verifikation von Gleichung (3.47) gelungen ist. Des Weiteren ist aus Bild 3.5 zuentnehmen, dass mit Erhöhung der Anzahl an Stützstellen P,Q der Fehler wie erwartet ab-nimmt.
48
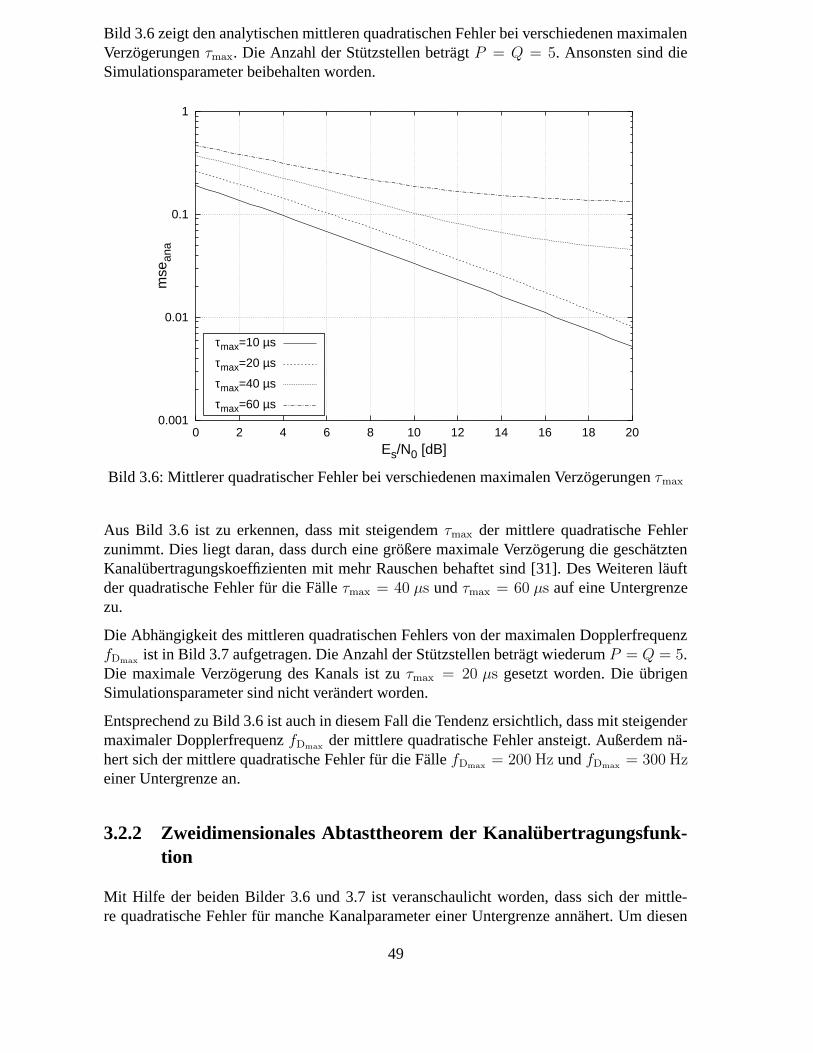
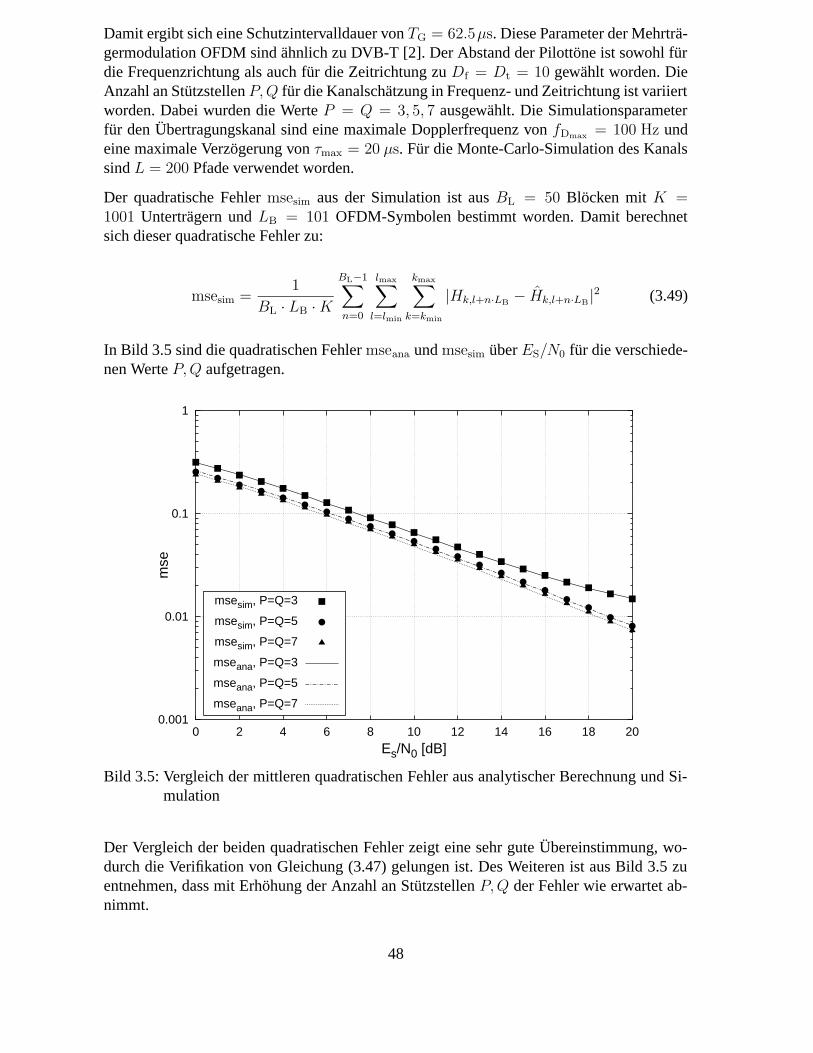
Bild 3.6 zeigt den analytischen mittleren quadratischen Fehler bei verschiedenen maximalenVerzögerungen τmax. Die Anzahl der Stützstellen beträgt P = Q = 5. Ansonsten sind dieSimulationsparameter beibehalten worden.
0.001
0.01
0.1
1
0 2 4 6 8 10 12 14 16 18 20
mse
ana
Es/N0 [dB]
τmax=10 µs
τmax=20 µs
τmax=40 µs
τmax=60 µs
Bild 3.6: Mittlerer quadratischer Fehler bei verschiedenen maximalen Verzögerungen τmax
Aus Bild 3.6 ist zu erkennen, dass mit steigendem τmax der mittlere quadratische Fehlerzunimmt. Dies liegt daran, dass durch eine größere maximale Verzögerung die geschätztenKanalübertragungskoeffizienten mit mehr Rauschen behaftet sind [31]. Des Weiteren läuftder quadratische Fehler für die Fälle τmax = 40 µs und τmax = 60 µs auf eine Untergrenzezu.
Die Abhängigkeit des mittleren quadratischen Fehlers von der maximalen DopplerfrequenzfDmax ist in Bild 3.7 aufgetragen. Die Anzahl der Stützstellen beträgt wiederum P = Q = 5.Die maximale Verzögerung des Kanals ist zu τmax = 20 µs gesetzt worden. Die übrigenSimulationsparameter sind nicht verändert worden.
Entsprechend zu Bild 3.6 ist auch in diesem Fall die Tendenz ersichtlich, dass mit steigendermaximaler Dopplerfrequenz fDmax der mittlere quadratische Fehler ansteigt. Außerdem nä-hert sich der mittlere quadratische Fehler für die Fälle fDmax = 200 Hz und fDmax = 300 Hzeiner Untergrenze an.
3.2.2 Zweidimensionales Abtasttheorem der Kanalübertragungsfunk-tion
Mit Hilfe der beiden Bilder 3.6 und 3.7 ist veranschaulicht worden, dass sich der mittle-re quadratische Fehler für manche Kanalparameter einer Untergrenze annähert. Um diesen
49
0.001
0.01
0.1
1
0 2 4 6 8 10 12 14 16 18 20
mse
ana
Es/N0 [dB]
fDmax=50 Hz
fDmax=100 Hz
fDmax=200 Hz
fDmax=300 Hz
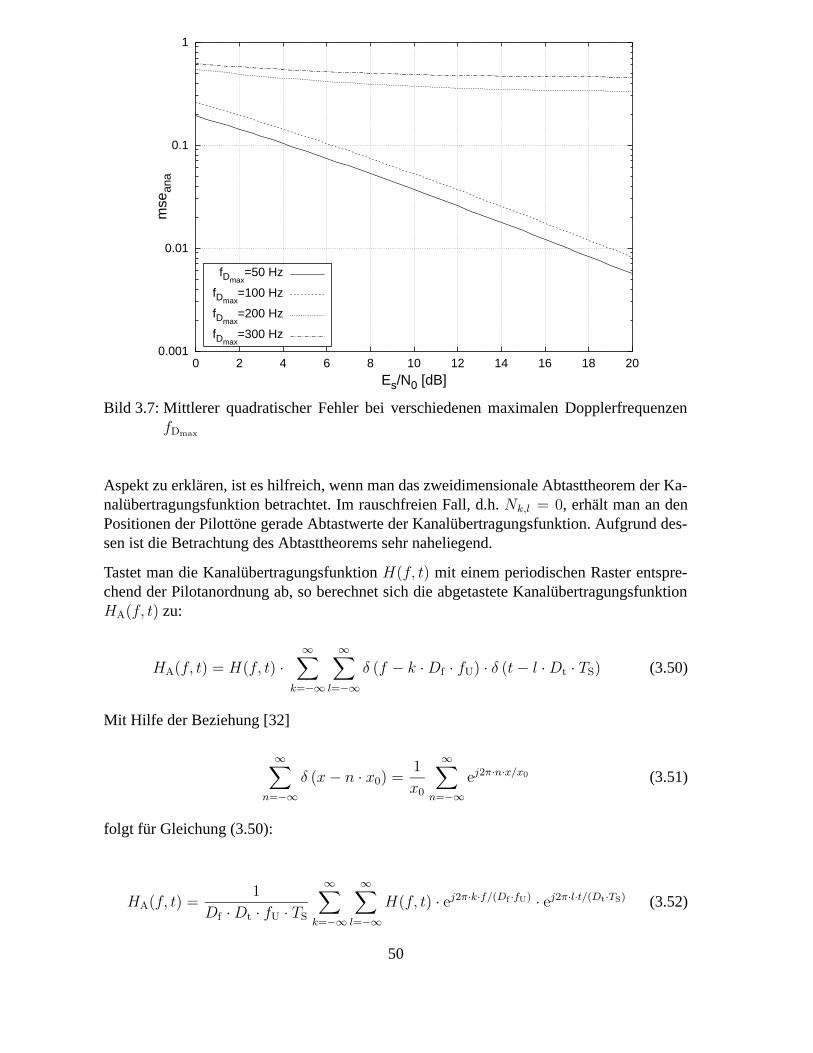
Bild 3.7: Mittlerer quadratischer Fehler bei verschiedenen maximalen DopplerfrequenzenfDmax
Aspekt zu erklären, ist es hilfreich, wenn man das zweidimensionale Abtasttheorem der Ka-nalübertragungsfunktion betrachtet. Im rauschfreien Fall, d.h. Nk,l = 0, erhält man an denPositionen der Pilottöne gerade Abtastwerte der Kanalübertragungsfunktion. Aufgrund des-sen ist die Betrachtung des Abtasttheorems sehr naheliegend.
Tastet man die Kanalübertragungsfunktion H(f, t) mit einem periodischen Raster entspre-chend der Pilotanordnung ab, so berechnet sich die abgetastete KanalübertragungsfunktionHA(f, t) zu:
HA(f, t) = H(f, t) ·∞∑
k=−∞
∞∑
l=−∞
δ (f − k ·Df · fU) · δ (t− l ·Dt · TS) (3.50)
Mit Hilfe der Beziehung [32]
∞∑
n=−∞
δ (x− n · x0) =1
x0
∞∑
n=−∞
ej2π·n·x/x0 (3.51)
folgt für Gleichung (3.50):
HA(f, t) =1
Df ·Dt · fU · TS
∞∑
k=−∞
∞∑
l=−∞
H(f, t) · ej2π·k·f/(Df ·fU) · ej2π·l·t/(Dt·TS) (3.52)
50
Die dopplervariante Impulsantwort SA (τ, fD) zu HA(f, t) berechnet sich unter Verwendungder Gleichungen (2.15) und (2.16) zu:
SA (τ, fD) =
∫ ∞
−∞
∫ ∞
−∞
HA(f, t) · ej2π·τ ·f · e−j2π·fD·t · dfdt (3.53)
Entsprechend Gleichung (3.53) bestimmt sich die dopplervariante Impulsantwort S (τ, fD)von H(f, t) zu:
S (τ, fD) =
∫ ∞
−∞
∫ ∞
−∞
H(f, t) · ej2π·τ ·f · e−j2π·fD·t · dfdt (3.54)
Setzt man Gleichung (3.52) in Gleichung (3.53) ein, so erhält man für die dopplervarianteImpulsantwort SA (τ, fD) unter Berücksichtigung von Gleichung (3.54) Folgendes:
SA (τ, fD) =1
Df ·Dt · fU · TS
∞∑
k=−∞
∞∑
l=−∞
S
(
τ +k
Df · fU
, fD −l
Dt · TS
)
(3.55)
Die dopplervariante Impulsantwort SA (τ, fD) bestimmt sich aus einer periodischen Wieder-holung von S (τ, fD). Aus den Gleichungen (2.34) und (2.36) ist zu erkennen, dass S (τ, fD)nur für 0 ≤ τ ≤ τmax und |fD| < fDmax ungleich Null ist. Damit lässt sich die Kanal-übertragungsfunktion H(f, t) aus der abgetasteten Kanalübertragungsfunktion HA(f, t) re-konstruieren, falls sich die periodischen Wiederholungen von S (τ, fD) in Gleichung (3.55)nicht überlappen (zweidimensionales Abtasttheorem). Die Bedingungen, damit diese Über-lappungen nicht auftreten, sind:
1
Df · fU
> τmax und1
Dt · TS
> 2 · fDmax (3.56)
Um eine Aufwärtstastung von HA(f, t) zu erhalten, werden zusätzliche Abtastwerte benö-tigt. Für die Berechnung dieser Abtastwerte müssen ebenfalls die Bedingungen aus Glei-chung (3.56) erfüllt sein, damit eine höhere Abtastung von H(f, t) erzielt werden kann. Dievorgestellte Kanalschätzung stellt gerade so ein Aufwärtstasten mit Interpolation dar. Aus-gehend von den Stützstellen an den Positionen der Pilottöne werden die Kanalübertragungs-koeffizienten an dazwischenliegenden Positionen berechnet. Damit müssen die Bedingungenaus Gleichung (3.56) erfüllt sein, um eine ideale Kanalschätzung durchführen zu können.
Berechnet man nun die Quotienten aus Gleichung (3.56) für die Parameter der obigen Simu-lationen, so erhält man Folgendes:
1
Df · fU
= 25 µs und1
Dt · TS
= 320 Hz (3.57)
Damit lässt sich eine ideale Kanalschätzung nur für
τmax < 25 µs und fDmax < 160 Hz (3.58)
51
erzielen. Betrachtet man nun noch einmal die Bilder 3.6 und 3.7, so ist offensichtlich, dasssich der mittlere quadratische Fehler für die Parameter τmax = 40 µs, τmax = 60 µs, fDmax =200 Hz oder fDmax = 300 Hz einer Untergrenze annähern muss. Jedoch ist der mittlere qua-dratische Fehler bei Verletzung des Abtasttheorems in Bild 3.7 deutlich höher als in Bild 3.6.Dies liegt an den Wahrscheinlichkeitsdichten für die Verzögerungen nach Gleichung (2.36)und für die Dopplerfrequenzen nach Gleichung (2.34). Die Dopplerfrequenzen haben einehohe Dichte nahe bei ±fDmax , so dass sich schon eine leichte Überlappung der periodischenWiederholungen von S (τ, fD) in fD-Richtung drastisch auswirkt.
Eine allgemeine Herleitung des zweidimensionalen Abtasttheorems der Kanalübertragungs-funktion H(f, t) für beliebige periodische Abtastraster und die Auswirkungen auf die Ka-nalschätzung findet sich in [29]. Eine Erläuterung zum zweidimensionalen Abtasttheoremund zur Kanalschätzung am Beispiel des digitalen terrestrischen Fernsehens (DVB-T) [2]mit einem diagonalen Pilotraster ist in [31] gegeben.
3.3 Simulationsergebnisse
3.3.1 Kanalcodierung
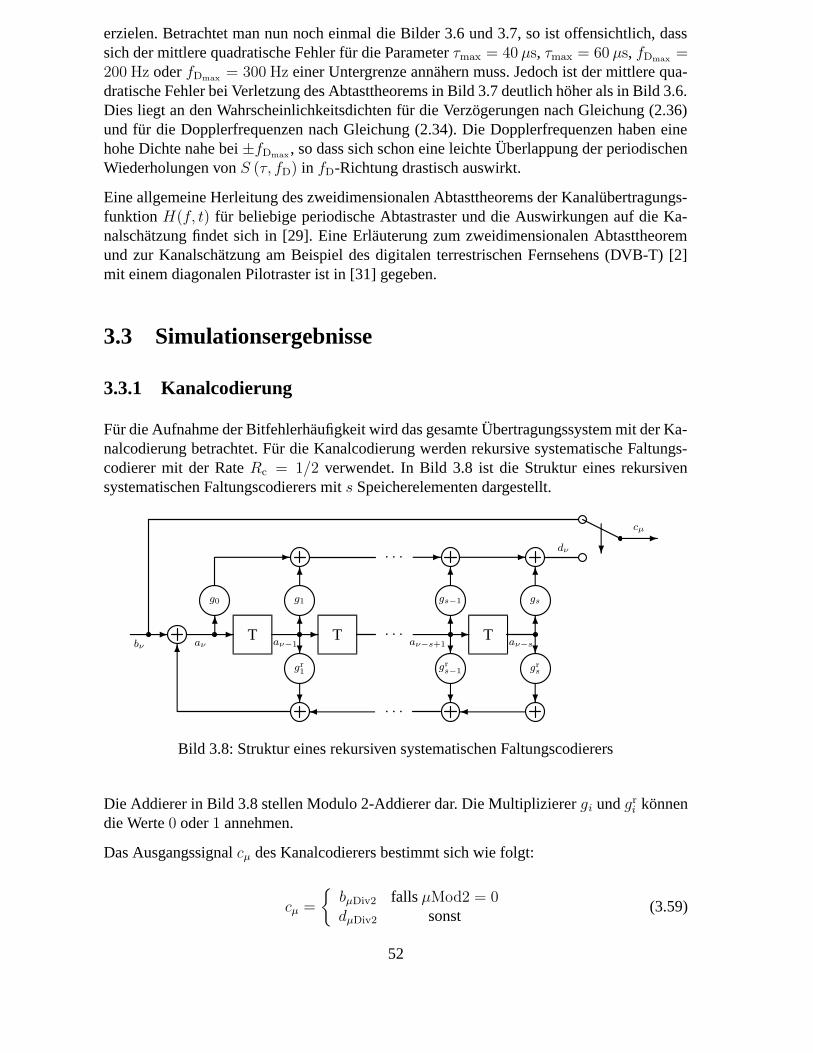
Für die Aufnahme der Bitfehlerhäufigkeit wird das gesamte Übertragungssystem mit der Ka-nalcodierung betrachtet. Für die Kanalcodierung werden rekursive systematische Faltungs-codierer mit der Rate Rc = 1/2 verwendet. In Bild 3.8 ist die Struktur eines rekursivensystematischen Faltungscodierers mit s Speicherelementen dargestellt.
-bν
-aν
6
g0
-
T aν−1
-?
gr1
?
6
6
g1
6· · · -
T · · · -aν−s+1 ?
grs−1
?· · ·�
6
gs−1
6
-
T aν−s ?gr
s
?�
6
gs
6
dν ?-
cµ
Bild 3.8: Struktur eines rekursiven systematischen Faltungscodierers
Die Addierer in Bild 3.8 stellen Modulo 2-Addierer dar. Die Multiplizierer gi und gri können
die Werte 0 oder 1 annehmen.
Das Ausgangssignal cµ des Kanalcodierers bestimmt sich wie folgt:
cµ =
{
bµDiv2 falls µMod2 = 0dµDiv2 sonst
(3.59)
52
Die Polynome für die Abgriffe des Schieberegisters werden allgemein als Oktalzahlen ange-geben. Das Polynom Gr für die Rückkopplung bestimmt sich zu:
Gr = 2s +s−1∑
i=0
grs−i · 2i (3.60)
Entsprechend Gleichung (3.60) berechnet sich das Polynom G für die Vorwärtsrichtung zu:
G =s∑
i=0
gs−i · 2i (3.61)
Mit der Bezeichnung (s; Gr, G) lässt sich nun die Struktur des rekursiven systematischenFaltungscodierers definieren. Die Angabe der Anzahl der Speicherelemente s ist nicht ex-plizit notwendig, da diese Information aus Gleichung (3.60) zu entnehmen ist. Doch ist dieAngabe von s für eine schnellere Erfassung des Codierers sehr hilfreich.
Der aktuelle Inhalt des Schieberegisters bzw. Zustand des Codierers Sν ergibt sich mit Hilfevon Bild 3.8 zu:
Sν =s∑
i=1
aν−i · 2i−1 (3.62)
Für die betrachtete blockweise Übertragung wird der rekursive systematische Faltungscodie-rer für jeden Block im Startzustand SStart = 0 beginnen. Außerdem ist es möglich, dass derCodierer zum Abschluss wieder in einem bestimmten Zustand endet. Meistens wird dazu derZustand SEnde = 0 ausgewählt. Um dies zu erreichen, müssen die letzten s Bits entsprechendgewählt werden. Durch diese Terminierung des Codierers ist die gesamte Rate des Codierersein bisschen kleiner als Rc, da nun die Anzahl der Informationsbits eines Blockes, die demCodierer übergeben werden, um s verringert ist.
Für die Decodierung des rekursiven systematischen Faltungscodierers wird der APP-Algo-rithmus [23, 20] verwendet. Dieser Algorithmus wird in der Weise verwirklicht, dass er dieempfangenen L-Werte [20] verarbeitet.
3.3.2 Bitfehlerhäufigkeit
Im Folgenden wird die Bitfehlerhäufigkeit (BFH) als Funktion von Eb/N0 für die Parameter,die auch für Bild 3.5 gewählt worden sind, durch Simulation ermittelt. Als Kanalcodierer istder rekursive Faltungscodierer (s = 4; Gr = 037, G = 023) verwendet worden. Der Interlea-ver ist ein Zufallsinterleaver, Random Interleaver, mit der Interleavergröße VL.
Für die Bestimmung der mittleren Energie pro Informationsbit Eb wird die gesamte Red-undanz in dem Übertragungssystem berücksichtigt. Damit folgt für Eb/N0 in Abhängigkeitvon ES/N0 Folgendes4:
4Aufgrund der Normierung des Übertragungskanals durch Gleichung (2.28) bezieht sich Eb/N0 in diesemFall sowohl auf den Sender als auch auf den Empfänger.
53
Eb
N0
∣
∣
∣
∣
dB
=ES
N0
∣
∣
∣
∣
dB
+ 10 · lg1
Rc ·Rterm ·Rn ·Rg · M(3.63)
In Gleichung (3.63) berücksichtigt Rterm eine mögliche Terminierung des rekursiven syste-matischen Faltungscodierers. Falls der Faltungscodierer nicht terminiert ist, ist Rterm = 1.Im Weiteren werden die verwendeten rekursiven Faltungscodierer immer terminiert. Damitist Rterm < 1. Die Anzahl der Bits pro Symbol in (3.63) ist mit M bezeichnet.
Das Übertragen der Pilotsymbole wird durch den Faktor Rn berücksichtigt. Der Faktor Rn
steht also für die Nutzsymbolrate, d.h. er gibt an, wieviel der übertragenen Symbole mitDaten- oder Nutzinformation belegt sind. Die Nutzsymbolrate berechnet sich zu:
Rn =K · LB − (KDivDf + λf) · (LDivDt + λt)
K · LB
(3.64)
mit
λf =
{
0 für KModDf = 01 sonst
und λt =
{
0 für LBModDt = 01 sonst
(3.65)
Für die gewählten Simulationsparameter ergibt sich die Nutzsymbolrate zu:
Rn = 0, 989011 (3.66)
Der Faktor Rg in Gleichung (3.63) berücksichtigt die Redundanz, die durch das Einfügen desSchutzintervalls hinzukommt. Dieser Faktor bestimmt sich aus dem Verhältnis der NutzdauerTU zur Dauer TS eines OFDM-Symbols.
Rg =TU
TS
=TS − TG
TS
= 1− TG
TS
(3.67)
Für die gewählten Simulationsparameter beträgt der Faktor:
Rg = 0, 8 (3.68)
Mit den gegebenen Parametern berechnet sich die Größe des Zufallsinterleavers VL wie folgt:
VL = M ·Rn ·K · LB (3.69)
Als Zahlenwert für VL aufgrund der gewählten Simulationsparameter mit M = 2 für dasQPSK-Verfahren mit Gray-Mapping nach Gleichung (2.78) folgt:
VL = 199980 (3.70)
54
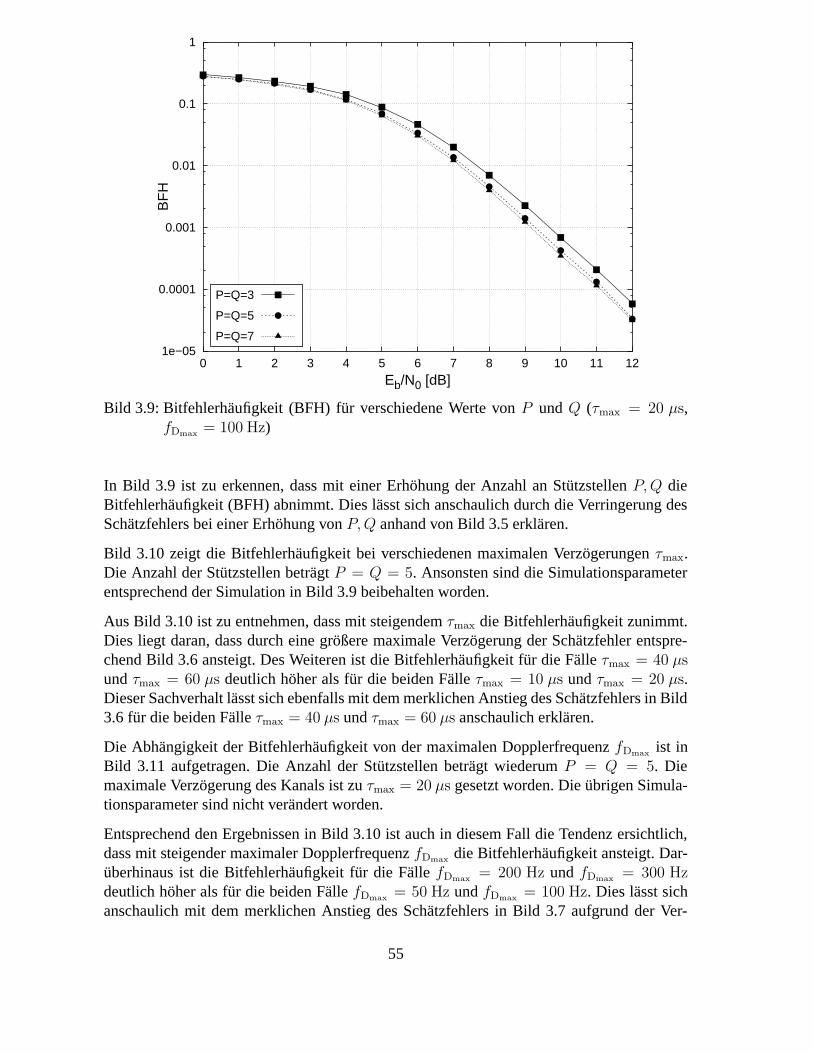
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
P=Q=3
P=Q=5
P=Q=7
Bild 3.9: Bitfehlerhäufigkeit (BFH) für verschiedene Werte von P und Q (τmax = 20 µs,fDmax = 100 Hz)
In Bild 3.9 ist zu erkennen, dass mit einer Erhöhung der Anzahl an Stützstellen P,Q dieBitfehlerhäufigkeit (BFH) abnimmt. Dies lässt sich anschaulich durch die Verringerung desSchätzfehlers bei einer Erhöhung von P,Q anhand von Bild 3.5 erklären.
Bild 3.10 zeigt die Bitfehlerhäufigkeit bei verschiedenen maximalen Verzögerungen τmax.Die Anzahl der Stützstellen beträgt P = Q = 5. Ansonsten sind die Simulationsparameterentsprechend der Simulation in Bild 3.9 beibehalten worden.
Aus Bild 3.10 ist zu entnehmen, dass mit steigendem τmax die Bitfehlerhäufigkeit zunimmt.Dies liegt daran, dass durch eine größere maximale Verzögerung der Schätzfehler entspre-chend Bild 3.6 ansteigt. Des Weiteren ist die Bitfehlerhäufigkeit für die Fälle τmax = 40 µsund τmax = 60 µs deutlich höher als für die beiden Fälle τmax = 10 µs und τmax = 20 µs.Dieser Sachverhalt lässt sich ebenfalls mit dem merklichen Anstieg des Schätzfehlers in Bild3.6 für die beiden Fälle τmax = 40 µs und τmax = 60 µs anschaulich erklären.
Die Abhängigkeit der Bitfehlerhäufigkeit von der maximalen Dopplerfrequenz fDmax ist inBild 3.11 aufgetragen. Die Anzahl der Stützstellen beträgt wiederum P = Q = 5. Diemaximale Verzögerung des Kanals ist zu τmax = 20 µs gesetzt worden. Die übrigen Simula-tionsparameter sind nicht verändert worden.
Entsprechend den Ergebnissen in Bild 3.10 ist auch in diesem Fall die Tendenz ersichtlich,dass mit steigender maximaler Dopplerfrequenz fDmax die Bitfehlerhäufigkeit ansteigt. Dar-überhinaus ist die Bitfehlerhäufigkeit für die Fälle fDmax = 200 Hz und fDmax = 300 Hzdeutlich höher als für die beiden Fälle fDmax = 50 Hz und fDmax = 100 Hz. Dies lässt sichanschaulich mit dem merklichen Anstieg des Schätzfehlers in Bild 3.7 aufgrund der Ver-
55
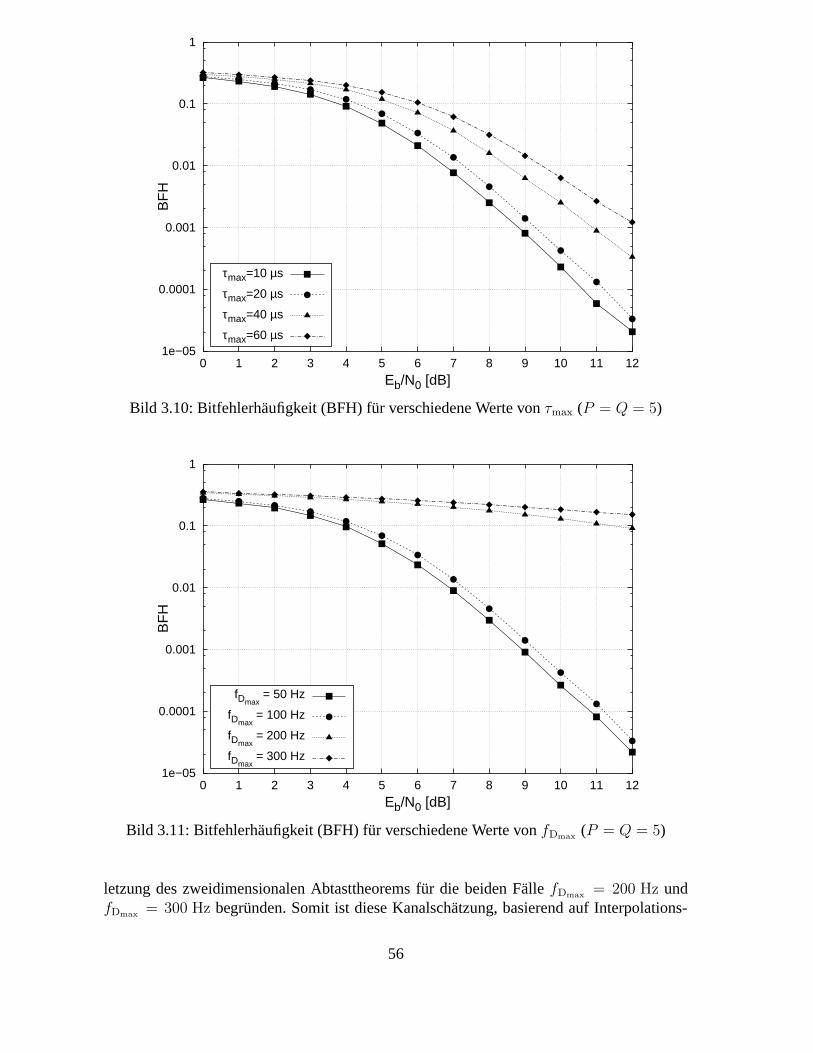
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
τmax=10 µs
τmax=20 µs
τmax=40 µs
τmax=60 µs
Bild 3.10: Bitfehlerhäufigkeit (BFH) für verschiedene Werte von τmax (P = Q = 5)
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
fDmax = 50 Hz
fDmax = 100 Hz
fDmax = 200 Hz
fDmax = 300 Hz
Bild 3.11: Bitfehlerhäufigkeit (BFH) für verschiedene Werte von fDmax (P = Q = 5)
letzung des zweidimensionalen Abtasttheorems für die beiden Fälle fDmax = 200 Hz undfDmax = 300 Hz begründen. Somit ist diese Kanalschätzung, basierend auf Interpolations-
56
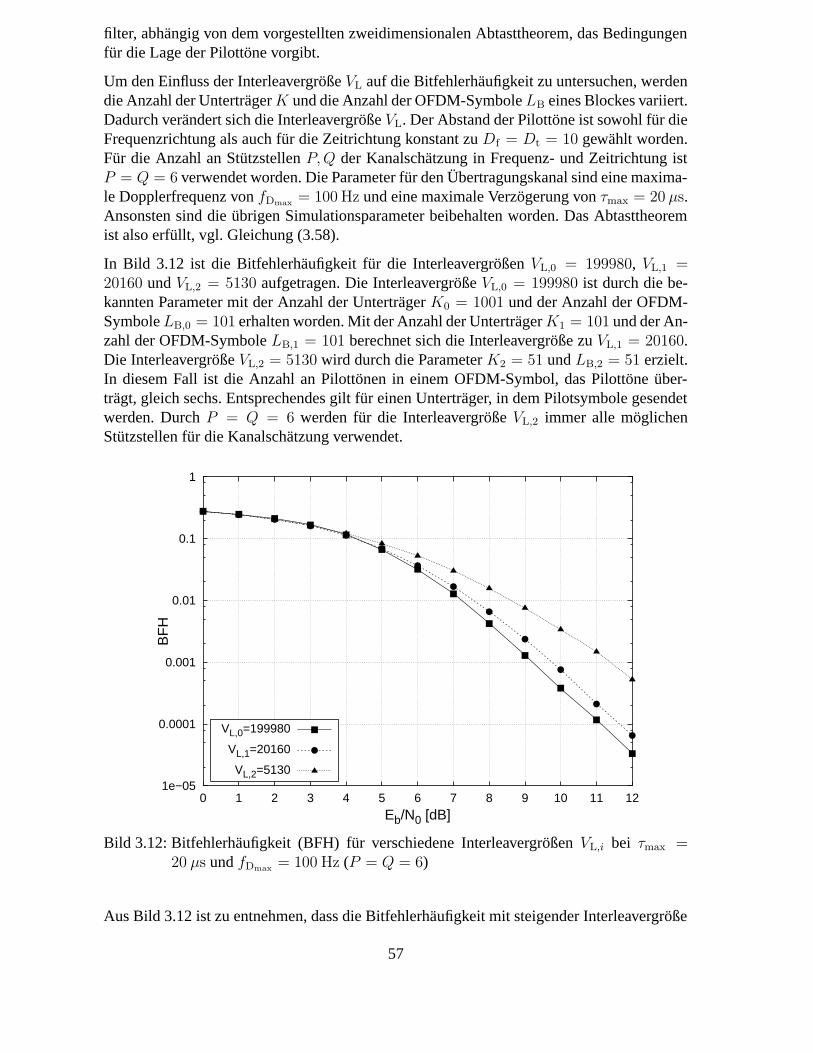
filter, abhängig von dem vorgestellten zweidimensionalen Abtasttheorem, das Bedingungenfür die Lage der Pilottöne vorgibt.
Um den Einfluss der Interleavergröße VL auf die Bitfehlerhäufigkeit zu untersuchen, werdendie Anzahl der Unterträger K und die Anzahl der OFDM-Symbole LB eines Blockes variiert.Dadurch verändert sich die Interleavergröße VL. Der Abstand der Pilottöne ist sowohl für dieFrequenzrichtung als auch für die Zeitrichtung konstant zu Df = Dt = 10 gewählt worden.Für die Anzahl an Stützstellen P,Q der Kanalschätzung in Frequenz- und Zeitrichtung istP = Q = 6 verwendet worden. Die Parameter für den Übertragungskanal sind eine maxima-le Dopplerfrequenz von fDmax = 100 Hz und eine maximale Verzögerung von τmax = 20 µs.Ansonsten sind die übrigen Simulationsparameter beibehalten worden. Das Abtasttheoremist also erfüllt, vgl. Gleichung (3.58).
In Bild 3.12 ist die Bitfehlerhäufigkeit für die Interleavergrößen VL,0 = 199980, VL,1 =20160 und VL,2 = 5130 aufgetragen. Die Interleavergröße VL,0 = 199980 ist durch die be-kannten Parameter mit der Anzahl der Unterträger K0 = 1001 und der Anzahl der OFDM-Symbole LB,0 = 101 erhalten worden. Mit der Anzahl der Unterträger K1 = 101 und der An-zahl der OFDM-Symbole LB,1 = 101 berechnet sich die Interleavergröße zu VL,1 = 20160.Die Interleavergröße VL,2 = 5130 wird durch die Parameter K2 = 51 und LB,2 = 51 erzielt.In diesem Fall ist die Anzahl an Pilottönen in einem OFDM-Symbol, das Pilottöne über-trägt, gleich sechs. Entsprechendes gilt für einen Unterträger, in dem Pilotsymbole gesendetwerden. Durch P = Q = 6 werden für die Interleavergröße VL,2 immer alle möglichenStützstellen für die Kanalschätzung verwendet.
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
VL,0=199980
VL,1=20160
VL,2=5130
Bild 3.12: Bitfehlerhäufigkeit (BFH) für verschiedene Interleavergrößen VL,i bei τmax =20 µs und fDmax = 100 Hz (P = Q = 6)
Aus Bild 3.12 ist zu entnehmen, dass die Bitfehlerhäufigkeit mit steigender Interleavergröße
57
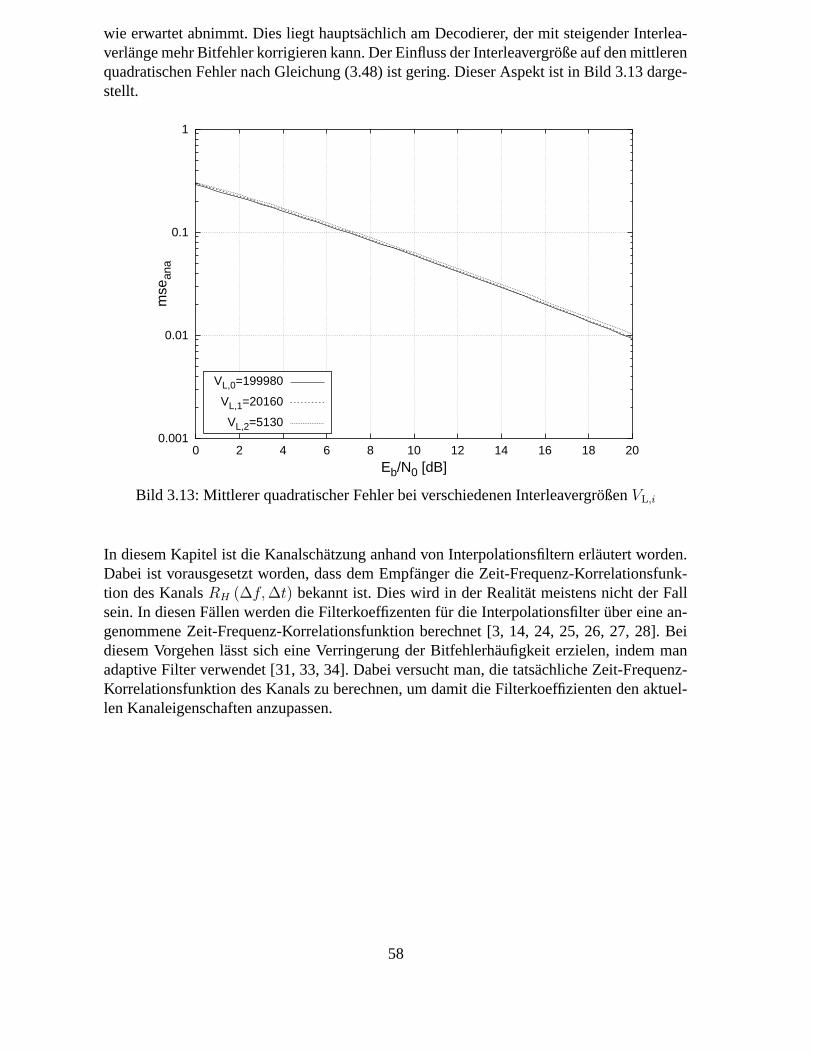
wie erwartet abnimmt. Dies liegt hauptsächlich am Decodierer, der mit steigender Interlea-verlänge mehr Bitfehler korrigieren kann. Der Einfluss der Interleavergröße auf den mittlerenquadratischen Fehler nach Gleichung (3.48) ist gering. Dieser Aspekt ist in Bild 3.13 darge-stellt.
0.001
0.01
0.1
1
0 2 4 6 8 10 12 14 16 18 20
mse
ana
Eb/N0 [dB]
VL,0=199980
VL,1=20160
VL,2=5130
Bild 3.13: Mittlerer quadratischer Fehler bei verschiedenen Interleavergrößen VL,i
In diesem Kapitel ist die Kanalschätzung anhand von Interpolationsfiltern erläutert worden.Dabei ist vorausgesetzt worden, dass dem Empfänger die Zeit-Frequenz-Korrelationsfunk-tion des Kanals RH (∆f, ∆t) bekannt ist. Dies wird in der Realität meistens nicht der Fallsein. In diesen Fällen werden die Filterkoeffizenten für die Interpolationsfilter über eine an-genommene Zeit-Frequenz-Korrelationsfunktion berechnet [3, 14, 24, 25, 26, 27, 28]. Beidiesem Vorgehen lässt sich eine Verringerung der Bitfehlerhäufigkeit erzielen, indem manadaptive Filter verwendet [31, 33, 34]. Dabei versucht man, die tatsächliche Zeit-Frequenz-Korrelationsfunktion des Kanals zu berechnen, um damit die Filterkoeffizienten den aktuel-len Kanaleigenschaften anzupassen.
58
Kapitel 4
Kanalschätzung mit iterativer Filterungund Decodierung
Seit der Erfindung der Turbo-Codierung [35] sind iterative Empfängerstrukturen ein breitesGebiet der Forschung geworden. Für die in [35] vorgestellte Turbo-Codierung werden zweirekursive systematische Faltungscodierer parallel miteinander verknüpft. Eine serielle Ver-knüpfung zweier Codierer, um das Turbo-Prinzip beim Empfänger auszunutzen, ist in [36]dargestellt. In diesem Fall besteht die Iterationsschleife aus einem inneren Decodierer undeinem äußeren Decodierer. In [18, 19] ist gezeigt worden, dass das Turbo-Prinzip auch beieiner seriellen Verknüpfung eines Soft-Demappers als innere Komponente und eines äuße-ren Decodierers angewandt werden kann. Dabei zeigt sich, dass Anti-Gray-Mappings nachmehrmaligem Durchlaufen der Iterationsschleife eine geringere Bitfehlerhäufigkeit erzielenals Gray-Mappings, bei denen die Ausnutzung des Turbo-Prinzips zu keiner nennenswertenVerbesserung führt. Eine weitere Anwendung des Turbo-Prinzips ist die Turbo-Entzerrung[37, 38, 39, 40, 41, 42]. Dabei wird die Entzerrung eines frequenzselektiven Kanals beiEinträgermodulation als innere Komponente einer seriellen Verknüpfung mit einem äußerenDecodierer verwendet. Die Entzerrung erfolgt dabei nach dem APP-Algorithmus, der aufdem Viterbi-Algorithmus basiert. Als Voraussetzung für die Turbo-Entzerrung wird ange-nommen, dass die Kanalimpulsantwort beim Empfänger bekannt ist.
In [43, 44, 45] wird die Kanalschätzung und Entzerrung in eine Iterationsschleife mit dem äu-ßeren Decodierer eingebettet. Die Übertragung erfolgt dabei ebenfalls über einen frequenzse-lektiven Kanal bei Einträgermodulation. In diesem Fall wird das Turbo-Prinzip nicht nur fürdie Entzerrung, sondern auch für die Schätzung der Kanalimpulsantwort verwendet. IterativeKanalschätzung und Decodierung für ein Einträgermodulationssystem mit BPSK Modulati-on bei Übertragung über einen nicht frequenzselektiven Kanal finden sich in [46, 47, 48, 49,50, 51]. Dabei werden Pilotsymbole zu den Nutzdaten hinzugenommen, um beim Empfän-ger eine Kanalschätzung zu ermöglichen. Durch Einbindung der Kanalschätzung als innereKomponente in eine Iterationsschleife mit dem äußeren Decodierer kann die Kanalschätzungverbessert und damit eine Verringerung der Bitfehlerhäufigkeit erzielt werden.
In diesem Kapitel wird die Grundidee aus [46, 47] auf ein OFDM-System angewendet. Eswird vor allem von Interesse sein, wie sich diese Kanalschätzung mit iterativer Filterung undDecodierung bei Verletzung des zweidimensionalen Abtasttheorems der Kanalübertragungs-funktion verhält.
59
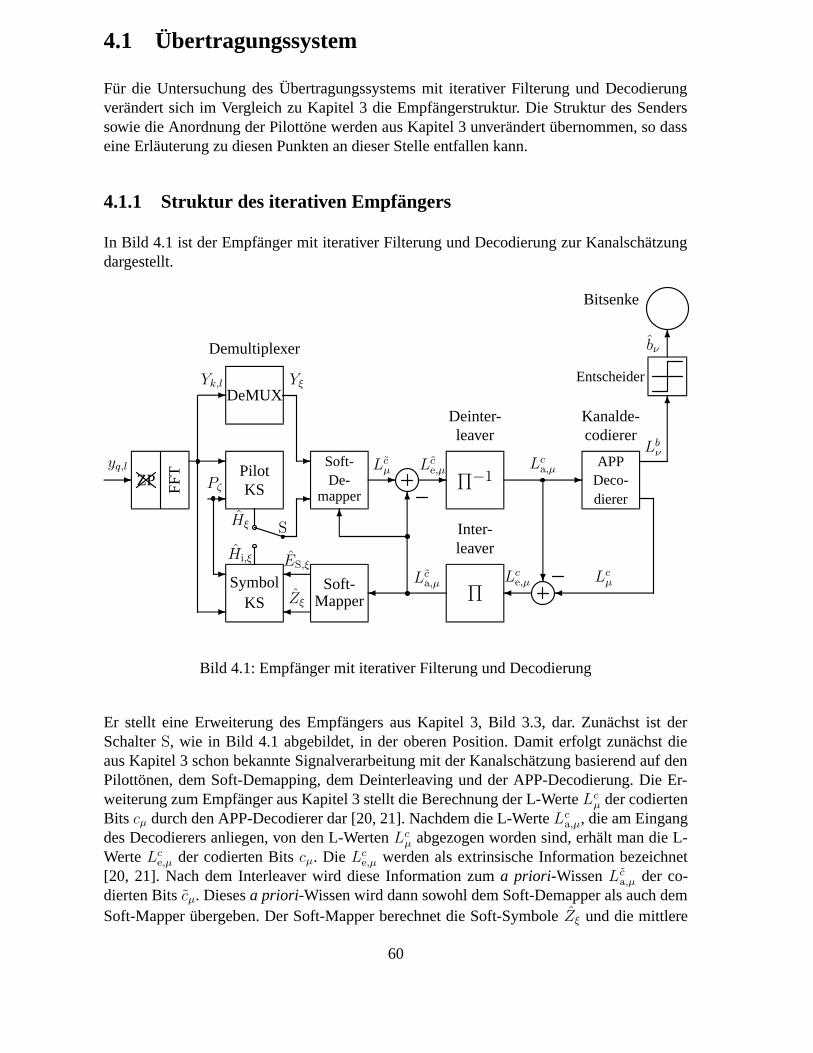
4.1 Übertragungssystem
Für die Untersuchung des Übertragungssystems mit iterativer Filterung und Decodierungverändert sich im Vergleich zu Kapitel 3 die Empfängerstruktur. Die Struktur des Senderssowie die Anordnung der Pilottöne werden aus Kapitel 3 unverändert übernommen, so dasseine Erläuterung zu diesen Punkten an dieser Stelle entfallen kann.
4.1.1 Struktur des iterativen Empfängers
In Bild 4.1 ist der Empfänger mit iterativer Filterung und Decodierung zur Kanalschätzungdargestellt.
-yq,l
ZP FFT
-
-Pζ
PilotKS
-Yk,l
DeMUX
Demultiplexer
-
Yξ
Soft-De-
mapper
-Lc
µ -Lc
e,µ
Π−1
Deinter-leaver
-Lc
a,µAPP
Deco-dierer
Kanalde-codierer
Lbν
6
Entscheider
6bν
Bitsenke
�Lc
µ?�Lc
e,µ
Π
Inter-leaver
�Lc
a,µ
66
Soft-Mapper�
Zξ
�ES,ξ
SymbolKS-
-
-
Hξ
Hi,ξ
S
Bild 4.1: Empfänger mit iterativer Filterung und Decodierung
Er stellt eine Erweiterung des Empfängers aus Kapitel 3, Bild 3.3, dar. Zunächst ist derSchalter S, wie in Bild 4.1 abgebildet, in der oberen Position. Damit erfolgt zunächst dieaus Kapitel 3 schon bekannte Signalverarbeitung mit der Kanalschätzung basierend auf denPilottönen, dem Soft-Demapping, dem Deinterleaving und der APP-Decodierung. Die Er-weiterung zum Empfänger aus Kapitel 3 stellt die Berechnung der L-Werte Lc
µ der codiertenBits cµ durch den APP-Decodierer dar [20, 21]. Nachdem die L-Werte Lc
a,µ, die am Eingangdes Decodierers anliegen, von den L-Werten Lc
µ abgezogen worden sind, erhält man die L-Werte Lc
e,µ der codierten Bits cµ. Die Lce,µ werden als extrinsische Information bezeichnet
[20, 21]. Nach dem Interleaver wird diese Information zum a priori-Wissen Lca,µ der co-
dierten Bits cµ. Dieses a priori-Wissen wird dann sowohl dem Soft-Demapper als auch demSoft-Mapper übergeben. Der Soft-Mapper berechnet die Soft-Symbole Zξ und die mittlere
60

Signalenergie ES,ξ. Die Zξ und ES,ξ dienen zusammen mit den Pilottönen Pζ als Eingang füreine weitere Kanalschätzung. Diese wird als symbolbasierte Kanalschätzung (Symbol KS)bezeichnet, da die Soft-Symbole Zξ und die mittlere Signalenergie ES,ξ verwendet werden.Nach der Schätzung von Hi,ξ wird der Schalter S in die untere Position gelegt und somitdie Iterationsschleife geschlossen. Danach erfolgt wieder das Soft-Demapping, das nun aufdas a priori-Wissen Lc
a,µ und auf die neu geschätzten Kanalübertragungskoeffizienten Hi,ξ
aus der Iterationsschleife zurückgreifen kann. Entsprechend zum Vorgehen beim Decodierermuss für die weitere Verarbeitung in der Iterationsschleife die extrinsische Information L c
e,µ
durch Subtraktion von Lcµ mit Lc
a,µ bestimmt werden [18, 19]. Nach anschließendem Dein-terleaving und erneutem Decodieren ist der erste Iterationsdurchlauf abgeschlossen, und einnächster Durchlauf kann erfolgen.
4.1.2 Soft-Mapper
Die Aufgabe des Soft-Mappers besteht darin, mit Hilfe des a priori-Wissens Lca,µ ein Soft-
Symbol Zξ und eine mittlere Signalenergie ES,ξ zu bestimmen. Aus den L-Werten Lca,µ lassen
sich die Wahrscheinlichkeiten Pr [cµ = 1] und Pr [cµ = 0] mit Hilfe von Gleichung (3.8)berechnen.
Pr [cµ = 1]
Pr [cµ = 0]=
Pr [cµ = 1]
1− Pr [cµ = 1]= eLc
a,µ (4.1)
Gleichung (4.1) lässt sich nun nach Pr [cµ = 1] auflösen.
Pr [cµ = 1] =eLc
a,µ
1 + eLca,µ
=1
2
(
1 + tanh
(
Lca,µ
2
))
(4.2)
Aus Gleichung (4.2) kann man die Wahrscheinlichkeit Pr [cµ = 0] wie folgt bestimmen:
Pr [cµ = 0] = 1− Pr [cµ = 1] =1
2
(
1− tanh
(
Lca,µ
2
))
(4.3)
Mit Hilfe der Wahrscheinlichkeiten Pr [cµ = 1] und Pr [cµ = 0] wird nun das Soft-SymbolZξ als Erwartungswert von Zξ berechnet.
Zξ = E {Zξ} =2M−1∑
i=0
Bi · fmap,M
(
cξ·M+j,j=0...M−1
)
(4.4)
Die Verbundwahrscheinlichkeit Bi in Gleichung (4.4) ergibt sich wegen der statistischenUnabhängigkeit der cµ zu:
Bi = Pr[
cξ·M
]
· Pr[
cξ·M+1
]
· . . . · Pr[
cξ·M+M−1
]
(4.5)
61

Bi wird durch (4.2) und (4.3), d. h. durch die Eingangsgröße Lca,µ des Soft-Mappers, festge-
legt und ist somit bekannt.
Die Werte der codierten Bits cξ·M+j in den Gleichungen (4.4) und (4.5) erfüllen Gleichung(4.6).
M−1∑
j=0
cξ·M+j · 2j = i (4.6)
Unter der Voraussetzung, dass es sich beim a priori-Wissen Lca,µ um perfektes a priori-
Wissen handelt, ist das Soft-Symbol Zξ identisch mit Zξ.
Zξ = Zξ (4.7)
Neben dem Erwartungswert von Zξ berechnet der Soft-Mapper auch noch den Erwartungs-wert von |Zξ|2. Analog zu Gleichung (4.4) bestimmt sich der Erwartungswert von |Zξ|2 zu:
ES,ξ = E{
|Zξ|2}
=2M−1∑
i=0
Bi ·∣
∣fmap,M
(
cξ·M+j,j=0...M−1
)∣
∣
2(4.8)
Die erhaltenen Soft-Symbole Zξ nach Gleichung (4.4) sowie die mittlere Signalenergie ES,ξ
nach Gleichung (4.8) werden von der nachfolgenden symbolbasierten Kanalschätzung wei-terverarbeitet.
4.1.3 Symbolbasierte Kanalschätzung
Die symbolbasierte Kanalschätzung erhält an ihren Eingängen die Pilottöne Pζ , die Soft-Symbole Zξ und die mittlere Signalenergie ES,ξ vom Soft-Mapper. Mit Hilfe der PilottönePζ werden die Kanalübertragungskoeffizienten Hi,P,ζ an den Pilotpositionen entsprechendKapitel 3 berechnet.
Hi,P,ζ =YP,ζ
Pζ
(4.9)
In Gleichung (4.9) steht YP,ζ für ein Empfangssymbol an einer Pilotposition. Unter der An-nahme, dass die Datensymbole Zξ dem Empfänger bekannt sind, bestimmen sich die Kanal-übertragungskoeffizienten Hi,ξ an den Positionen der Datensymbole entsprechend Gleichung(4.9) zu:
Hi,ξ =Yξ
Zξ
(4.10)
=Yξ
|Zξ|2· Z∗
ξ (4.11)
62
Da dem Empfänger die gesendeten Datensymbole Zξ jedoch i. A. nicht bekannt sind, werdendie Erwartungswerte aus den Gleichungen (4.4) und (4.8) für die Berechnung der Kanalüber-tragungskoeffizienten Hi,ξ in Gleichung (4.11) näherungsweise herangezogen.
Hi,ξ =Yξ
E{
|Zξ|2} · (E {Zξ})∗ =
Yξ
ES,ξ
· Z∗ξ (4.12)
Die Verwendung von Gleichung (4.11) zur Berechnung von Hi,ξ in Gleichung (4.12) hat denHintergedanken, dass der Fall Zξ = 0 zu Hi,ξ = 0 führt. Mit Gleichung (4.10) würde manfür Zξ = 0 Hi,ξ = ∞ erhalten. Dieses Ergebnis wäre jedoch für eine weitere Signalver-arbeitung wenig sinnvoll. Der Fall Zξ = 0 kann z. B. dann auftreten, wenn die möglichenSendesymbole fmap,M (. . .) in Gleichung (4.4) gleiche Wahrscheinlichkeiten besitzen und ei-
ne QAM bilden. Die mittlere Signalenergie ES,ξ berechnet sich in diesem Fall zu ES,ξ = ES.Die dazugehörigen L-Werte Lc
a,M ·ξ+isind Null, d.h. der Decodierer kann für das betrachtete
Symbol kein a priori-Wissen berechnen.
Ein weiterer Vorteil der Berücksichtigung von Gleichung (4.11) gegenüber Gleichung (4.10)für Gleichung (4.12) ist, dass die mittlere Signalenergie ES,ξ immer größer oder gleich demminimalen Betragsquadrat von fmap,M (. . .) ist. Dadurch wird einer unnötigen Verstärkung
bei der Berechnung von Hi,ξ entgegengewirkt. Bei Verwendung von Gleichung (4.10) erfolgt
eine unnötige Verstärkung in den Fällen, in denen∣
∣
∣Zξ
∣
∣
∣kleiner als der minimale Betrag von
fmap,M (. . .) ist.
Im Falle einer PSK ist |Zξ| konstant. In diesem Fall gilt:
|Zξ| =∣
∣fmap,M (. . .)∣
∣ = |Z| (4.13)
Unter Verwendung von Gleichung (4.13) folgt für den Erwartungswert E{
|Zξ|2}
aus (4.8):
E{
|Zξ|2}
= |Z|2 (4.14)
Setzt man Gleichung (4.14) in Gleichung (4.12) ein, so berechnen sich die Kanalübertra-gungskoeffizienten Hi,ξ bei PSK zu:
Hi,ξ =Yξ
|Z|2· Z∗
ξ (4.15)
Dadurch kann im Falle einer PSK die explizite Berechnung der mittleren Signalenergie ES,ξ
nach Gleichung (4.8) im Soft-Mapper entfallen.
Für das Beispiel der QPSK aus Gleichung (2.78) mit |Z| =√
2 folgt für die Bestimmungder Kanalübertragungskoeffizienten Hi,ξ nach Gleichung (4.15):
Hi,ξ =Yξ
2· Z∗
ξ (4.16)
63
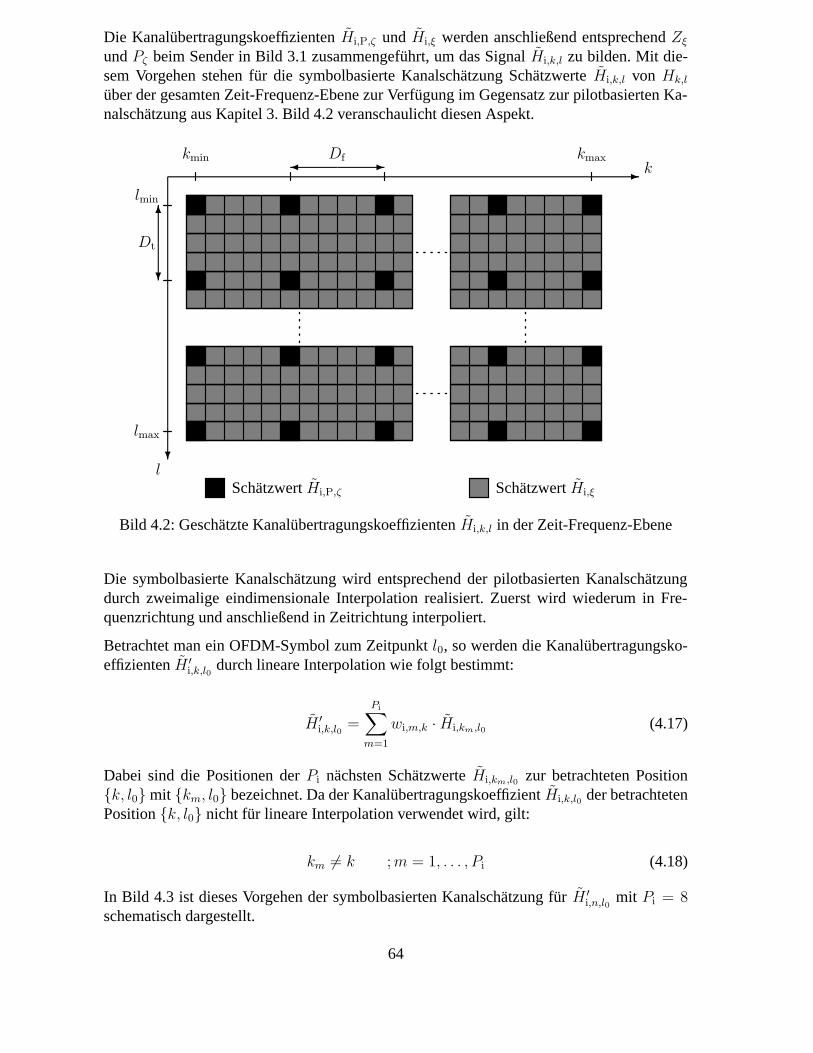
Die Kanalübertragungskoeffizienten Hi,P,ζ und Hi,ξ werden anschließend entsprechend Zξ
und Pζ beim Sender in Bild 3.1 zusammengeführt, um das Signal Hi,k,l zu bilden. Mit die-sem Vorgehen stehen für die symbolbasierte Kanalschätzung Schätzwerte Hi,k,l von Hk,l
über der gesamten Zeit-Frequenz-Ebene zur Verfügung im Gegensatz zur pilotbasierten Ka-nalschätzung aus Kapitel 3. Bild 4.2 veranschaulicht diesen Aspekt.
Schätzwert Hi,P,ζ Schätzwert Hi,ξ
?l
- kkmin kmax
lmin
lmax
� -Df
6
?
Dt
Bild 4.2: Geschätzte Kanalübertragungskoeffizienten Hi,k,l in der Zeit-Frequenz-Ebene
Die symbolbasierte Kanalschätzung wird entsprechend der pilotbasierten Kanalschätzungdurch zweimalige eindimensionale Interpolation realisiert. Zuerst wird wiederum in Fre-quenzrichtung und anschließend in Zeitrichtung interpoliert.
Betrachtet man ein OFDM-Symbol zum Zeitpunkt l0, so werden die Kanalübertragungsko-effizienten H ′
i,k,l0durch lineare Interpolation wie folgt bestimmt:
H ′i,k,l0
=
Pi∑
m=1
wi,m,k · Hi,km,l0 (4.17)
Dabei sind die Positionen der Pi nächsten Schätzwerte Hi,km,l0 zur betrachteten Position{k, l0}mit {km, l0} bezeichnet. Da der Kanalübertragungskoeffizient Hi,k,l0 der betrachtetenPosition {k, l0} nicht für lineare Interpolation verwendet wird, gilt:
km 6= k ; m = 1, . . . , Pi (4.18)
In Bild 4.3 ist dieses Vorgehen der symbolbasierten Kanalschätzung für H ′i,n,l0
mit Pi = 8schematisch dargestellt.
64
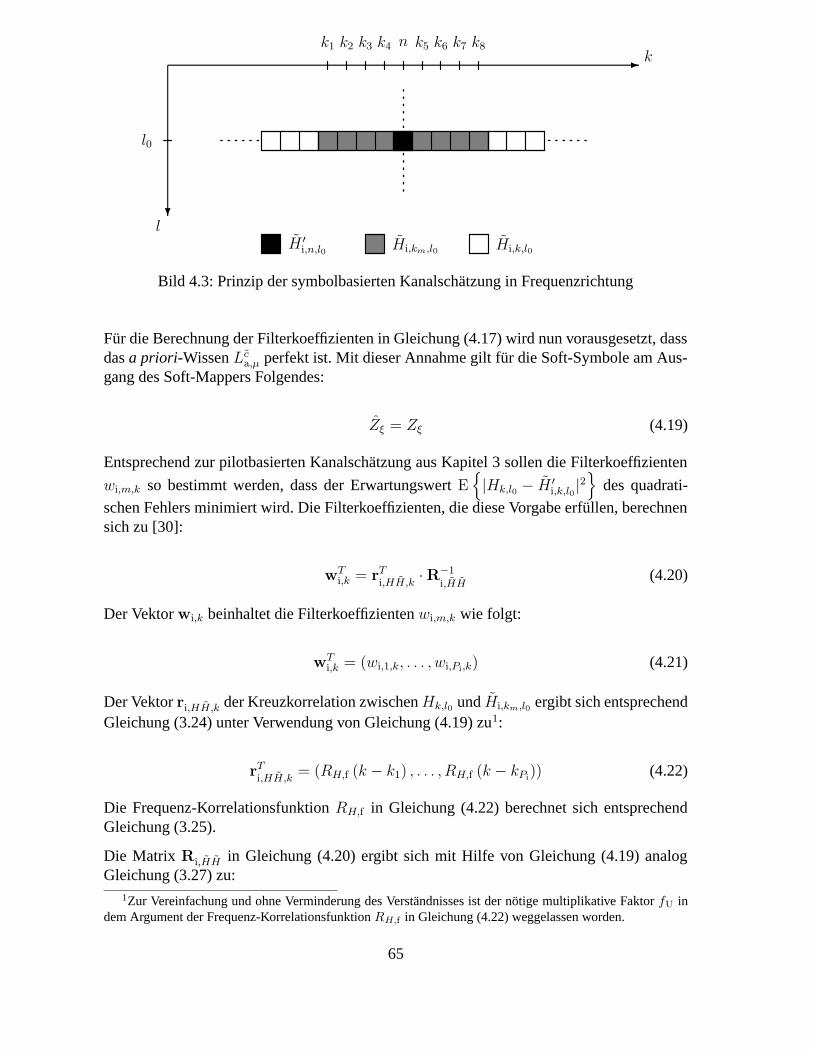
H ′i,n,l0 Hi,km,l0 Hi,k,l0
?l
- kk1 k2 k3 k4 n k5 k6 k7 k8
l0
Bild 4.3: Prinzip der symbolbasierten Kanalschätzung in Frequenzrichtung
Für die Berechnung der Filterkoeffizienten in Gleichung (4.17) wird nun vorausgesetzt, dassdas a priori-Wissen Lc
a,µ perfekt ist. Mit dieser Annahme gilt für die Soft-Symbole am Aus-gang des Soft-Mappers Folgendes:
Zξ = Zξ (4.19)
Entsprechend zur pilotbasierten Kanalschätzung aus Kapitel 3 sollen die Filterkoeffizienten
wi,m,k so bestimmt werden, dass der Erwartungswert E{
|Hk,l0 − H ′i,k,l0
|2}
des quadrati-
schen Fehlers minimiert wird. Die Filterkoeffizienten, die diese Vorgabe erfüllen, berechnensich zu [30]:
wTi,k = r
Ti,HH,k
·R−1
i,HH(4.20)
Der Vektor wi,k beinhaltet die Filterkoeffizienten wi,m,k wie folgt:
wTi,k = (wi,1,k, . . . , wi,Pi,k) (4.21)
Der Vektor ri,HH,k der Kreuzkorrelation zwischen Hk,l0 und Hi,km,l0 ergibt sich entsprechendGleichung (3.24) unter Verwendung von Gleichung (4.19) zu1:
rTi,HH,k
= (RH,f (k − k1) , . . . , RH,f (k − kPi)) (4.22)
Die Frequenz-Korrelationsfunktion RH,f in Gleichung (4.22) berechnet sich entsprechendGleichung (3.25).
Die Matrix Ri,HH in Gleichung (4.20) ergibt sich mit Hilfe von Gleichung (4.19) analogGleichung (3.27) zu:
1Zur Vereinfachung und ohne Verminderung des Verständnisses ist der nötige multiplikative Faktor fU indem Argument der Frequenz-Korrelationsfunktion RH,f in Gleichung (4.22) weggelassen worden.
65

Ri,HH =
1 + N0 · β RH,f (k1 − k2) · · · RH,f (k1 − kPi)
RH,f (k2 − k1) 1 + N0 · β RH,f (k2 − kPi)
.... . .
...RH,f (kPi
− k1) · · · RH,f (kPi− kPi−1) 1 + N0 · β
(4.23)
Erfüllen die Filterkoeffizienten wi,m,k Gleichung (4.20), so erhält man für den minimalen
quadratischen Fehler E{
|Hk,l0 − H ′i,k,l0
|2}
Folgendes [30]:
E{
|Hk,l0 − H ′i,k,l0
|2}
= Ji,minf ,k = 1− rTi,HH,k
·R−1
i,HH· r∗
i,HH,k(4.24)
Nach der Filterung in Frequenzrichtung sind die neuen Schätzwerte H ′i,k,l von Hk,l in der ge-
samten Zeit-Frequenz-Ebene bekannt. Der Filterung in Frequenzrichtung folgt die Filterungin Zeitrichtung. Betrachtet man dazu einen Unterträger k0, so erfolgt die lineare Interpolationin Zeitrichtung wie folgt:
Hi,k0,l =
Qi∑
m=1
vi,m,k0,l · H ′i,k0,lm (4.25)
Dabei sind die Positionen der Qi nächsten Schätzwerte H ′i,k0,lm
zur betrachteten Position{k0, l} mit {k0, lm} bezeichnet. Entsprechend der Interpolation in Frequenzrichtung wirdder Kanalübertragungskoeffizient H ′
i,k0,l der betrachteten Position {k0, l} nicht verwendet.Es gilt:
lm 6= l ; m = 1, . . . , Qi (4.26)
Bild 4.4 veranschaulicht das Vorgehen der symbolbasierten Kanalschätzung in Zeitrichtungfür Hi,k0,n mit Qi = 4.
Die optimalen Filterkoeffizienten ergeben sich entsprechend Gleichung (4.20) zu:
vTi,l = r
Ti,HH′,l
·R−1
i,H′H′ (4.27)
Der Vektor vi,l stellt sich dabei wie folgt dar:
vTi,l = (vi,1,k0,l, . . . , vi,Qi,k0,l) (4.28)
Der Vektor ri,HH′,l der Kreuzkorrelation zwischen Hk0,l und H ′i,k0,lm
ergibt sich entsprechendGleichung (3.36) zu2:
2Zur Vereinfachung und ohne Verminderung des Verständnisses ist der nötige multiplikative Faktor TS indem Argument der Zeit-Korrelationsfunktion RH,t in Gleichung (4.29) weggelassen worden.
66
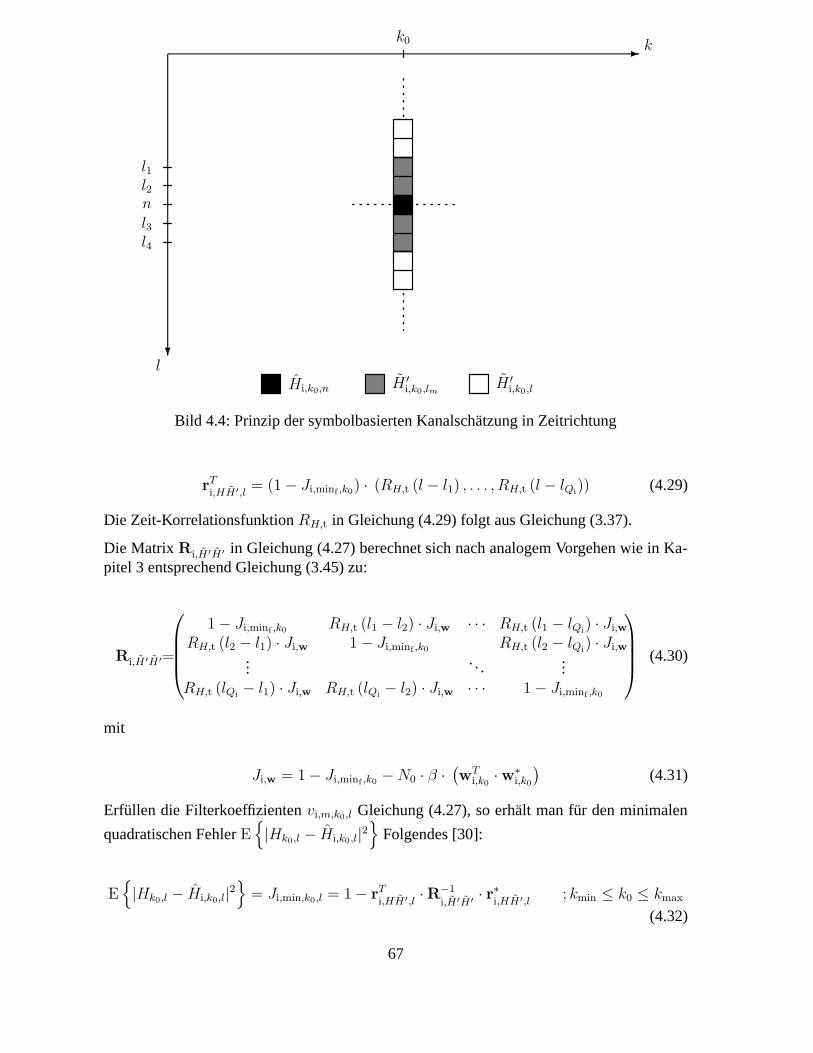
Hi,k0,n H ′i,k0,lm
H ′i,k0,l
?l
- kk0
l1l2nl3l4
Bild 4.4: Prinzip der symbolbasierten Kanalschätzung in Zeitrichtung
rTi,HH′,l
= (1− Ji,minf ,k0) · (RH,t (l − l1) , . . . , RH,t (l − lQi)) (4.29)
Die Zeit-Korrelationsfunktion RH,t in Gleichung (4.29) folgt aus Gleichung (3.37).
Die Matrix Ri,H′H′ in Gleichung (4.27) berechnet sich nach analogem Vorgehen wie in Ka-pitel 3 entsprechend Gleichung (3.45) zu:
Ri,H′H′=
1− Ji,minf ,k0 RH,t (l1 − l2) · Ji,w · · · RH,t (l1 − lQi) · Ji,w
RH,t (l2 − l1) · Ji,w 1− Ji,minf ,k0 RH,t (l2 − lQi) · Ji,w
.... . .
...RH,t (lQi
− l1) · Ji,w RH,t (lQi− l2) · Ji,w · · · 1− Ji,minf ,k0
(4.30)
mit
Ji,w = 1− Ji,minf ,k0 −N0 · β ·(
wTi,k0·w∗
i,k0
)
(4.31)
Erfüllen die Filterkoeffizienten vi,m,k0,l Gleichung (4.27), so erhält man für den minimalen
quadratischen Fehler E{
|Hk0,l − Hi,k0,l|2}
Folgendes [30]:
E{
|Hk0,l − Hi,k0,l|2}
= Ji,min,k0,l = 1− rTi,HH′,l
·R−1
i,H′H′ · r∗i,HH′,l; kmin ≤ k0 ≤ kmax
(4.32)
67
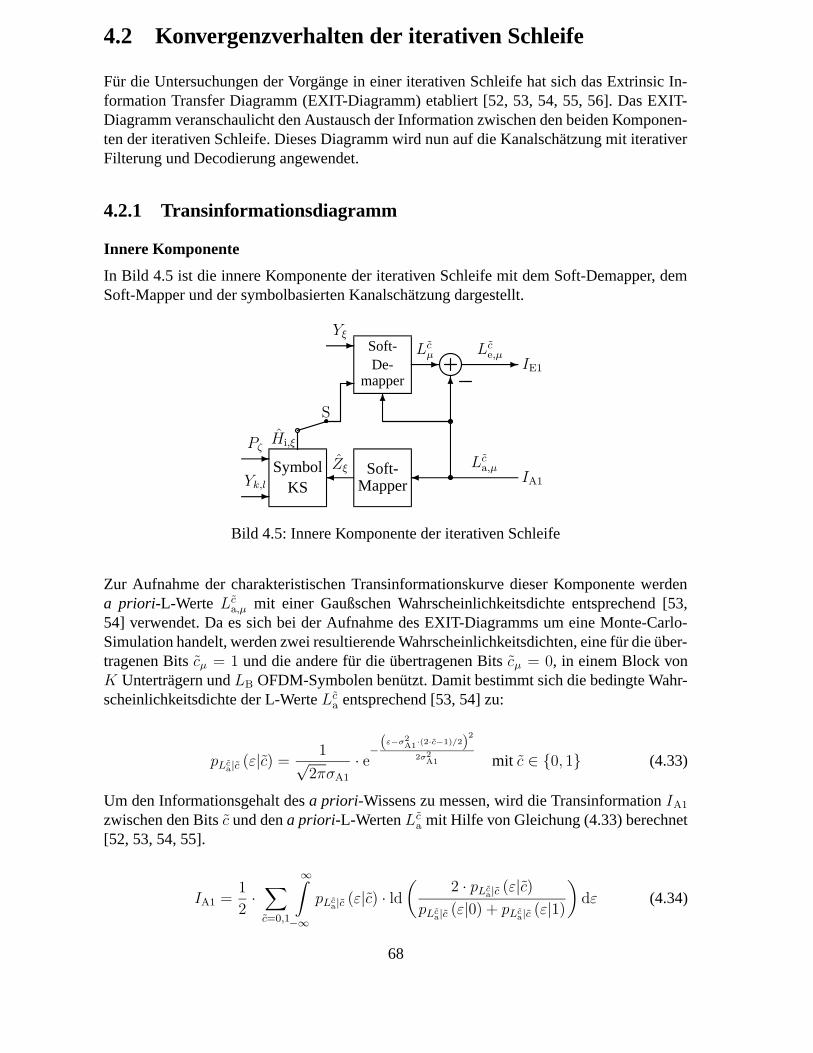
4.2 Konvergenzverhalten der iterativen Schleife
Für die Untersuchungen der Vorgänge in einer iterativen Schleife hat sich das Extrinsic In-formation Transfer Diagramm (EXIT-Diagramm) etabliert [52, 53, 54, 55, 56]. Das EXIT-Diagramm veranschaulicht den Austausch der Information zwischen den beiden Komponen-ten der iterativen Schleife. Dieses Diagramm wird nun auf die Kanalschätzung mit iterativerFilterung und Decodierung angewendet.
4.2.1 Transinformationsdiagramm
Innere Komponente
In Bild 4.5 ist die innere Komponente der iterativen Schleife mit dem Soft-Demapper, demSoft-Mapper und der symbolbasierten Kanalschätzung dargestellt.
-Yξ
Soft-De-
mapper
-Lc
µ -Lc
e,µIE1
IA1�
Lca,µ
66
Soft-Mapper
�ZξSymbol
KSYk,l-
Pζ-
-
Hi,ξ
S
Bild 4.5: Innere Komponente der iterativen Schleife
Zur Aufnahme der charakteristischen Transinformationskurve dieser Komponente werdena priori-L-Werte Lc
a,µ mit einer Gaußschen Wahrscheinlichkeitsdichte entsprechend [53,54] verwendet. Da es sich bei der Aufnahme des EXIT-Diagramms um eine Monte-Carlo-Simulation handelt, werden zwei resultierende Wahrscheinlichkeitsdichten, eine für die über-tragenen Bits cµ = 1 und die andere für die übertragenen Bits cµ = 0, in einem Block vonK Unterträgern und LB OFDM-Symbolen benützt. Damit bestimmt sich die bedingte Wahr-scheinlichkeitsdichte der L-Werte Lc
a entsprechend [53, 54] zu:
pLca|c
(ε|c) =1√
2πσA1
· e−(ε−σ2
A1·(2·c−1)/2)2
2σ2A1 mit c ∈ {0, 1} (4.33)
Um den Informationsgehalt des a priori-Wissens zu messen, wird die Transinformation IA1
zwischen den Bits c und den a priori-L-Werten Lca mit Hilfe von Gleichung (4.33) berechnet
[52, 53, 54, 55].
IA1 =1
2·∑
c=0,1
∞∫
−∞
pLca|c
(ε|c) · ld(
2 · pLca|c
(ε|c)pLc
a|c(ε|0) + pLc
a|c(ε|1)
)
dε (4.34)
68
Aus Gleichung (4.34) folgt mit Gleichung (4.33):
IA1 (σA1) =1√
2πσA1
∞∫
−∞
e−(ε−σ2
A1/2)2
2σ2A1 ·
(
1− ld(
1 + e−ε))
dε (4.35)
Für die Bestimmung der Transinformation IE1 wird der Informationsgehalt der extrinsischenL-Werte Lc
e,µ ausgewertet. Dazu werden mit Hilfe einer Monte-Carlo-Simulation die zweiresultierenden bedingten Wahrscheinlichkeitsdichten pLc
e|c(ε|0) und pLc
e|c(ε|1) eines Blockes
mit K Unterträgern und LB OFDM-Symbolen gemessen. Unter Verwendung dieser beidenWahrscheinlichkeitsdichten berechnet sich die Transinformation IE1 analog zu Gleichung(4.34).
IE1 =1
2·∑
c=0,1
∞∫
−∞
pLce|c
(ε|c) · ld(
2 · pLce|c
(ε|c)pLc
e|c(ε|0) + pLc
e|c(ε|1)
)
dε (4.36)
Damit lässt sich die Transinformation IE1 als Funktion der Transinformation IA1 und demEb/N0-Wert darstellen, um die charakteristische Transinformationskurve der inneren Kom-ponente zu erhalten [52, 53, 54, 55].
IE1 = T1 (IA1, Eb/N0) (4.37)
Die Abhängigkeit der charakteristischen Transinformationskurve vom Eb/N0-Wert beruhtdarauf, dass der Soft-Demapper das Empfangssignal Yξ für die Berechnung der L-Werte Lc
µ
verwendet [52, 53, 54, 55].
In Bild 4.6 sind charakteristische Transinformationskurven der inneren Komponente füreinen Block von K = 1001 Unterträgern und LB = 101 OFDM-Symbolen dargestellt. Inden diesem Bild zugrundeliegenden Monte-Carlo-Simulationen ist Eb/N0 variiert worden.Für die Simulationen sind die Unterträger mit dem QPSK-Verfahren moduliert worden. AlsMapping ist das Gray-Mapping nach Gleichung (2.78) verwendet worden. Der Unterträger-abstand beträgt fU = 4000 Hz. Die gesamte Dauer eines OFDM-Symbols ist TS = 312.5 µs.Damit ergibt sich eine Schutzintervalldauer von TG = 62.5µs. Diese Parameter der Mehrträ-germodulation OFDM sind ähnlich zu DVB-T [2]. Der Abstand der Pilottöne ist sowohl fürdie Frequenzrichtung als auch für die Zeitrichtung zu Df = Dt = 10 gewählt worden. DieAnzahl an Schätzwerten Pi, Qi für die symbolbasierte Kanalschätzung beträgt Pi = Qi = 10.Die Simulationsparameter für den Übertragungskanal sind eine maximale Dopplerfrequenzvon fDmax = 100 Hz und eine maximale Verzögerung von τmax = 20 µs. Für die Monte-Carlo-Simulation des Kanals sind L = 200 Pfade in Gleichung (2.27) verwendet worden.
Entsprechend Bild 4.5 wird die pilotbasierte Kanalschätzung für die Aufnahme der charak-teristischen Transinformationskurve der inneren Komponente nicht benötigt. Jedoch wirddie pilotbasierte Kanalschätzung noch eine wichtige Rolle für den Startpunkt der Iterations-schleife spielen. Auf diesen wichtigen Punkt wird in Kapitel 4.2.2 bei der Betrachtung vonTrajektorien im EXIT-Diagramm ausführlich eingegangen [52, 53, 54, 55].
69
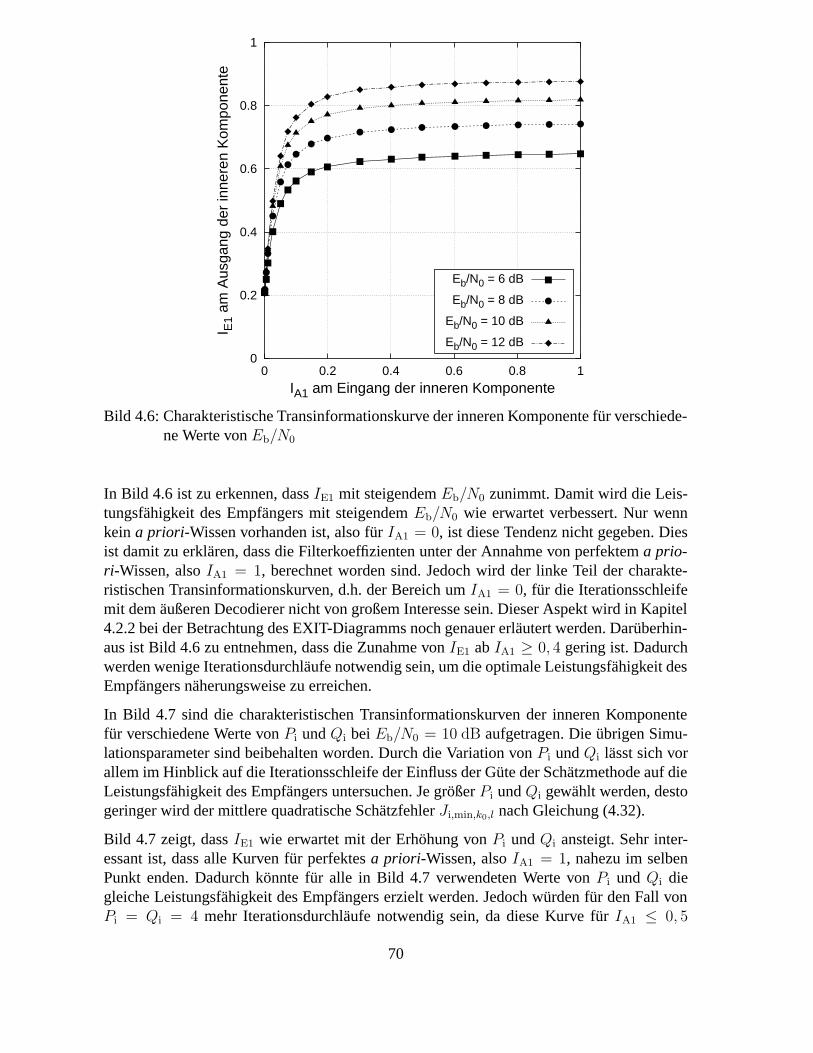
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
am A
usga
ng d
er in
nere
n K
ompo
nent
e
IA1 am Eingang der inneren Komponente
Eb/N0 = 6 dB
Eb/N0 = 8 dB
Eb/N0 = 10 dB
Eb/N0 = 12 dB
Bild 4.6: Charakteristische Transinformationskurve der inneren Komponente für verschiede-ne Werte von Eb/N0
In Bild 4.6 ist zu erkennen, dass IE1 mit steigendem Eb/N0 zunimmt. Damit wird die Leis-tungsfähigkeit des Empfängers mit steigendem Eb/N0 wie erwartet verbessert. Nur wennkein a priori-Wissen vorhanden ist, also für IA1 = 0, ist diese Tendenz nicht gegeben. Diesist damit zu erklären, dass die Filterkoeffizienten unter der Annahme von perfektem a prio-ri-Wissen, also IA1 = 1, berechnet worden sind. Jedoch wird der linke Teil der charakte-ristischen Transinformationskurven, d.h. der Bereich um IA1 = 0, für die Iterationsschleifemit dem äußeren Decodierer nicht von großem Interesse sein. Dieser Aspekt wird in Kapitel4.2.2 bei der Betrachtung des EXIT-Diagramms noch genauer erläutert werden. Darüberhin-aus ist Bild 4.6 zu entnehmen, dass die Zunahme von IE1 ab IA1 ≥ 0, 4 gering ist. Dadurchwerden wenige Iterationsdurchläufe notwendig sein, um die optimale Leistungsfähigkeit desEmpfängers näherungsweise zu erreichen.
In Bild 4.7 sind die charakteristischen Transinformationskurven der inneren Komponentefür verschiedene Werte von Pi und Qi bei Eb/N0 = 10 dB aufgetragen. Die übrigen Simu-lationsparameter sind beibehalten worden. Durch die Variation von Pi und Qi lässt sich vorallem im Hinblick auf die Iterationsschleife der Einfluss der Güte der Schätzmethode auf dieLeistungsfähigkeit des Empfängers untersuchen. Je größer Pi und Qi gewählt werden, destogeringer wird der mittlere quadratische Schätzfehler Ji,min,k0,l nach Gleichung (4.32).
Bild 4.7 zeigt, dass IE1 wie erwartet mit der Erhöhung von Pi und Qi ansteigt. Sehr inter-essant ist, dass alle Kurven für perfektes a priori-Wissen, also IA1 = 1, nahezu im selbenPunkt enden. Dadurch könnte für alle in Bild 4.7 verwendeten Werte von Pi und Qi diegleiche Leistungsfähigkeit des Empfängers erzielt werden. Jedoch würden für den Fall vonPi = Qi = 4 mehr Iterationsdurchläufe notwendig sein, da diese Kurve für IA1 ≤ 0, 5
70
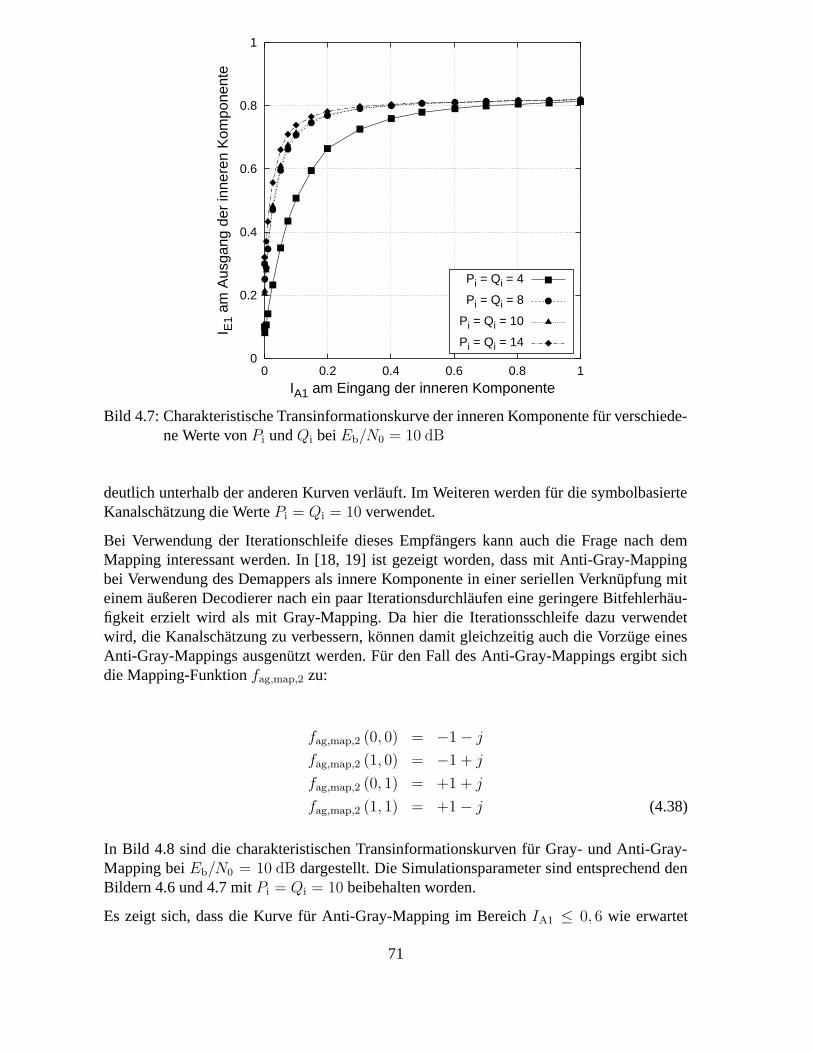
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
am A
usga
ng d
er in
nere
n K
ompo
nent
e
IA1 am Eingang der inneren Komponente
Pi = Qi = 4
Pi = Qi = 8
Pi = Qi = 10
Pi = Qi = 14
Bild 4.7: Charakteristische Transinformationskurve der inneren Komponente für verschiede-ne Werte von Pi und Qi bei Eb/N0 = 10 dB
deutlich unterhalb der anderen Kurven verläuft. Im Weiteren werden für die symbolbasierteKanalschätzung die Werte Pi = Qi = 10 verwendet.
Bei Verwendung der Iterationschleife dieses Empfängers kann auch die Frage nach demMapping interessant werden. In [18, 19] ist gezeigt worden, dass mit Anti-Gray-Mappingbei Verwendung des Demappers als innere Komponente in einer seriellen Verknüpfung miteinem äußeren Decodierer nach ein paar Iterationsdurchläufen eine geringere Bitfehlerhäu-figkeit erzielt wird als mit Gray-Mapping. Da hier die Iterationsschleife dazu verwendetwird, die Kanalschätzung zu verbessern, können damit gleichzeitig auch die Vorzüge einesAnti-Gray-Mappings ausgenützt werden. Für den Fall des Anti-Gray-Mappings ergibt sichdie Mapping-Funktion fag,map,2 zu:
fag,map,2 (0, 0) = −1− j
fag,map,2 (1, 0) = −1 + j
fag,map,2 (0, 1) = +1 + j
fag,map,2 (1, 1) = +1− j (4.38)
In Bild 4.8 sind die charakteristischen Transinformationskurven für Gray- und Anti-Gray-Mapping bei Eb/N0 = 10 dB dargestellt. Die Simulationsparameter sind entsprechend denBildern 4.6 und 4.7 mit Pi = Qi = 10 beibehalten worden.
Es zeigt sich, dass die Kurve für Anti-Gray-Mapping im Bereich IA1 ≤ 0, 6 wie erwartet
71
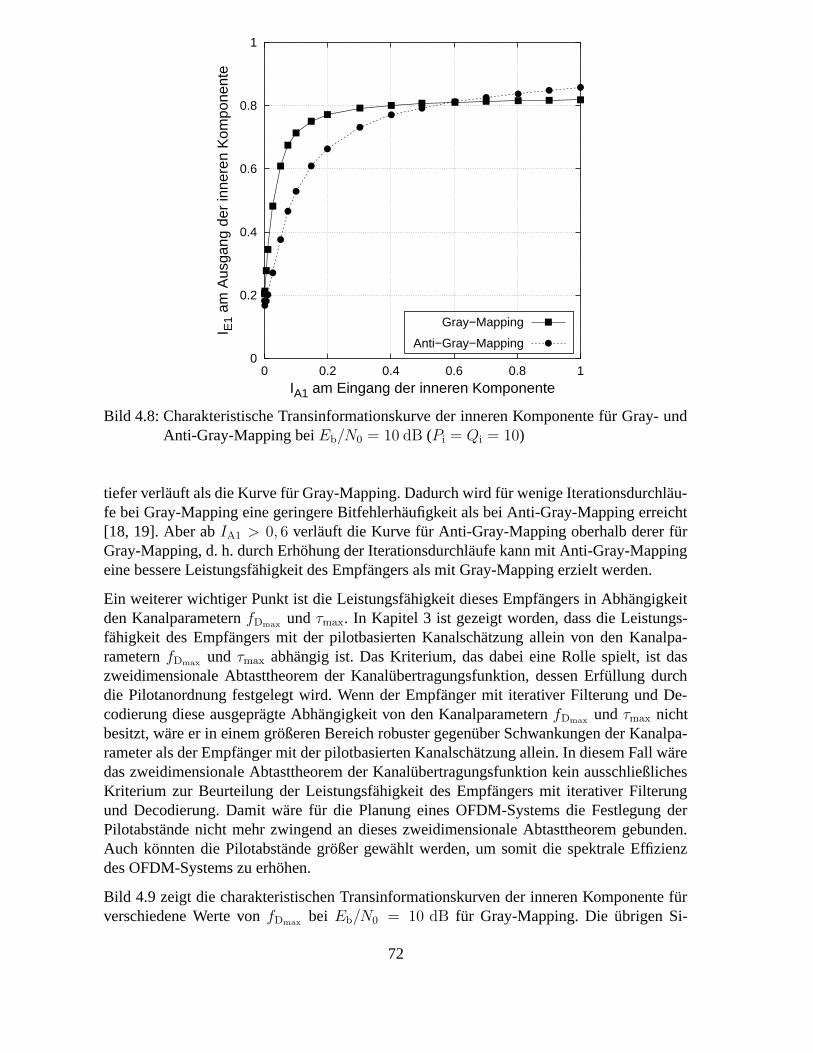
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
am A
usga
ng d
er in
nere
n K
ompo
nent
e
IA1 am Eingang der inneren Komponente
Gray−Mapping
Anti−Gray−Mapping
Bild 4.8: Charakteristische Transinformationskurve der inneren Komponente für Gray- undAnti-Gray-Mapping bei Eb/N0 = 10 dB (Pi = Qi = 10)
tiefer verläuft als die Kurve für Gray-Mapping. Dadurch wird für wenige Iterationsdurchläu-fe bei Gray-Mapping eine geringere Bitfehlerhäufigkeit als bei Anti-Gray-Mapping erreicht[18, 19]. Aber ab IA1 > 0, 6 verläuft die Kurve für Anti-Gray-Mapping oberhalb derer fürGray-Mapping, d. h. durch Erhöhung der Iterationsdurchläufe kann mit Anti-Gray-Mappingeine bessere Leistungsfähigkeit des Empfängers als mit Gray-Mapping erzielt werden.
Ein weiterer wichtiger Punkt ist die Leistungsfähigkeit dieses Empfängers in Abhängigkeitden Kanalparametern fDmax und τmax. In Kapitel 3 ist gezeigt worden, dass die Leistungs-fähigkeit des Empfängers mit der pilotbasierten Kanalschätzung allein von den Kanalpa-rametern fDmax und τmax abhängig ist. Das Kriterium, das dabei eine Rolle spielt, ist daszweidimensionale Abtasttheorem der Kanalübertragungsfunktion, dessen Erfüllung durchdie Pilotanordnung festgelegt wird. Wenn der Empfänger mit iterativer Filterung und De-codierung diese ausgeprägte Abhängigkeit von den Kanalparametern fDmax und τmax nichtbesitzt, wäre er in einem größeren Bereich robuster gegenüber Schwankungen der Kanalpa-rameter als der Empfänger mit der pilotbasierten Kanalschätzung allein. In diesem Fall wäredas zweidimensionale Abtasttheorem der Kanalübertragungsfunktion kein ausschließlichesKriterium zur Beurteilung der Leistungsfähigkeit des Empfängers mit iterativer Filterungund Decodierung. Damit wäre für die Planung eines OFDM-Systems die Festlegung derPilotabstände nicht mehr zwingend an dieses zweidimensionale Abtasttheorem gebunden.Auch könnten die Pilotabstände größer gewählt werden, um somit die spektrale Effizienzdes OFDM-Systems zu erhöhen.
Bild 4.9 zeigt die charakteristischen Transinformationskurven der inneren Komponente fürverschiedene Werte von fDmax bei Eb/N0 = 10 dB für Gray-Mapping. Die übrigen Si-
72
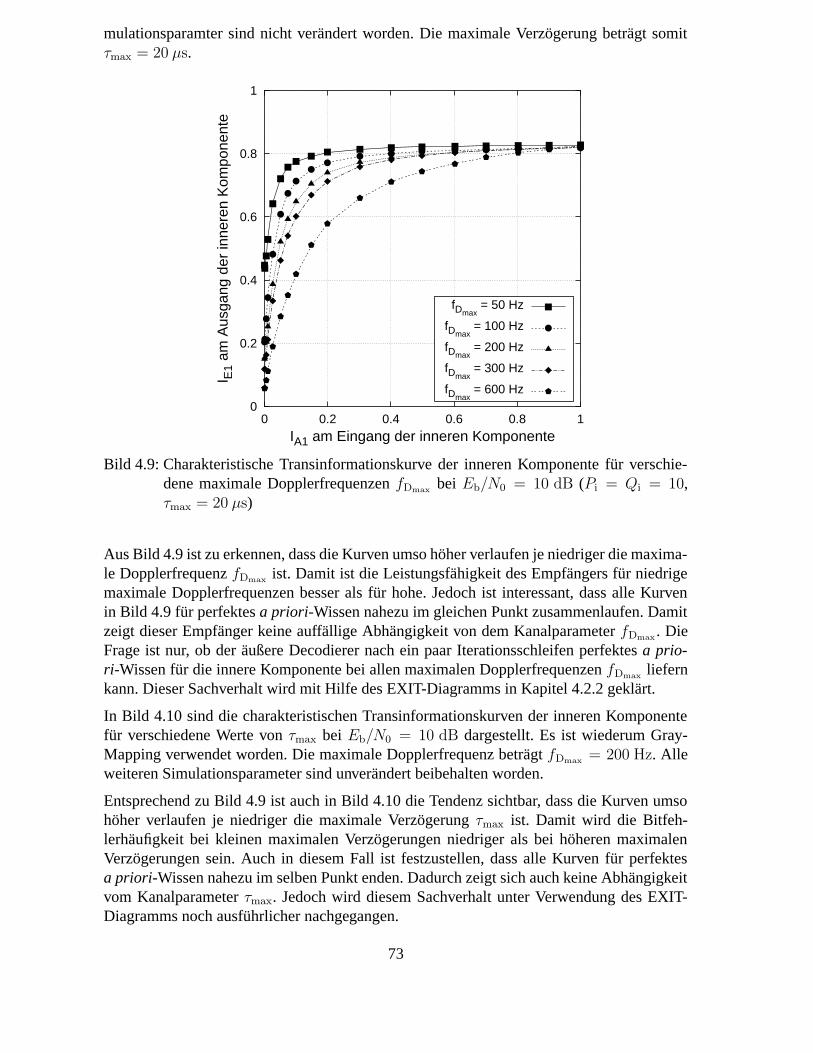
mulationsparamter sind nicht verändert worden. Die maximale Verzögerung beträgt somitτmax = 20 µs.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
am A
usga
ng d
er in
nere
n K
ompo
nent
e
IA1 am Eingang der inneren Komponente
fDmax = 50 Hz
fDmax = 100 Hz
fDmax = 200 Hz
fDmax = 300 Hz
fDmax = 600 Hz
Bild 4.9: Charakteristische Transinformationskurve der inneren Komponente für verschie-dene maximale Dopplerfrequenzen fDmax bei Eb/N0 = 10 dB (Pi = Qi = 10,τmax = 20 µs)
Aus Bild 4.9 ist zu erkennen, dass die Kurven umso höher verlaufen je niedriger die maxima-le Dopplerfrequenz fDmax ist. Damit ist die Leistungsfähigkeit des Empfängers für niedrigemaximale Dopplerfrequenzen besser als für hohe. Jedoch ist interessant, dass alle Kurvenin Bild 4.9 für perfektes a priori-Wissen nahezu im gleichen Punkt zusammenlaufen. Damitzeigt dieser Empfänger keine auffällige Abhängigkeit von dem Kanalparameter fDmax . DieFrage ist nur, ob der äußere Decodierer nach ein paar Iterationsschleifen perfektes a prio-ri-Wissen für die innere Komponente bei allen maximalen Dopplerfrequenzen fDmax liefernkann. Dieser Sachverhalt wird mit Hilfe des EXIT-Diagramms in Kapitel 4.2.2 geklärt.
In Bild 4.10 sind die charakteristischen Transinformationskurven der inneren Komponentefür verschiedene Werte von τmax bei Eb/N0 = 10 dB dargestellt. Es ist wiederum Gray-Mapping verwendet worden. Die maximale Dopplerfrequenz beträgt fDmax = 200 Hz. Alleweiteren Simulationsparameter sind unverändert beibehalten worden.
Entsprechend zu Bild 4.9 ist auch in Bild 4.10 die Tendenz sichtbar, dass die Kurven umsohöher verlaufen je niedriger die maximale Verzögerung τmax ist. Damit wird die Bitfeh-lerhäufigkeit bei kleinen maximalen Verzögerungen niedriger als bei höheren maximalenVerzögerungen sein. Auch in diesem Fall ist festzustellen, dass alle Kurven für perfektesa priori-Wissen nahezu im selben Punkt enden. Dadurch zeigt sich auch keine Abhängigkeitvom Kanalparameter τmax. Jedoch wird diesem Sachverhalt unter Verwendung des EXIT-Diagramms noch ausführlicher nachgegangen.
73
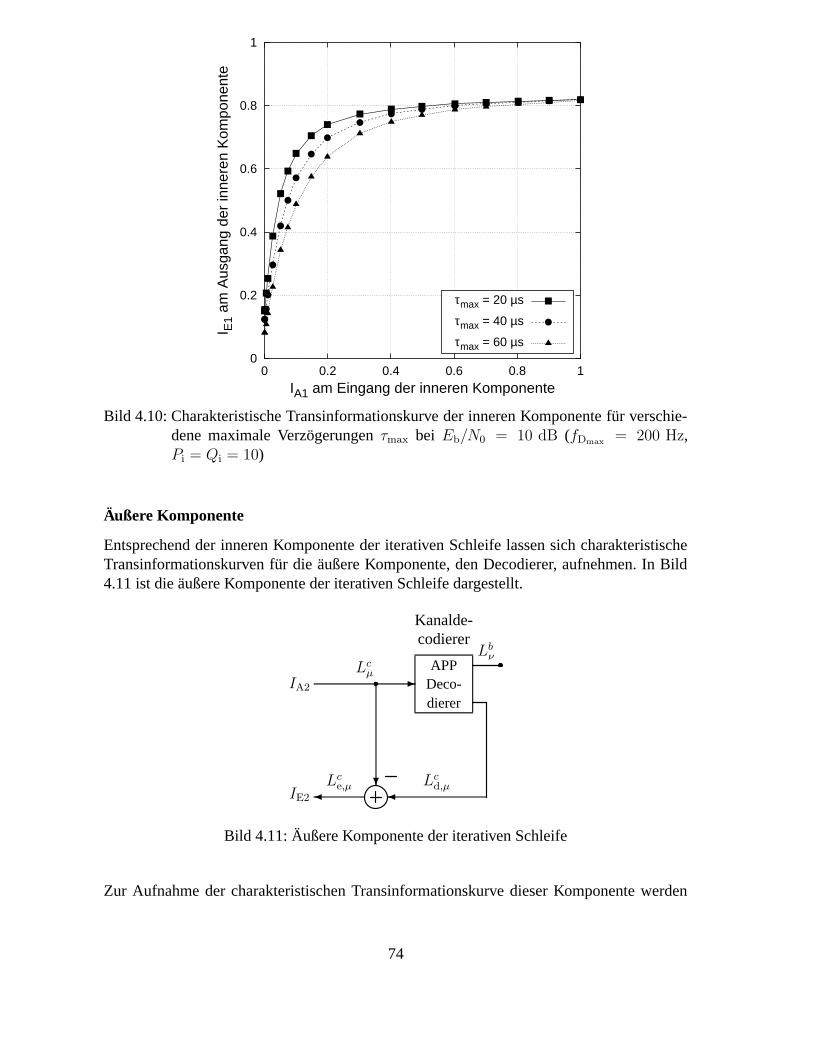
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
am A
usga
ng d
er in
nere
n K
ompo
nent
e
IA1 am Eingang der inneren Komponente
τmax = 20 µs
τmax = 40 µs
τmax = 60 µs
Bild 4.10: Charakteristische Transinformationskurve der inneren Komponente für verschie-dene maximale Verzögerungen τmax bei Eb/N0 = 10 dB (fDmax = 200 Hz,Pi = Qi = 10)
Äußere Komponente
Entsprechend der inneren Komponente der iterativen Schleife lassen sich charakteristischeTransinformationskurven für die äußere Komponente, den Decodierer, aufnehmen. In Bild4.11 ist die äußere Komponente der iterativen Schleife dargestellt.
IA2-
Lcµ
APPDeco-dierer
Kanalde-codierer
Lbν
�Lc
d,µ?�
Lce,µ
IE2
Bild 4.11: Äußere Komponente der iterativen Schleife
Zur Aufnahme der charakteristischen Transinformationskurve dieser Komponente werden
74
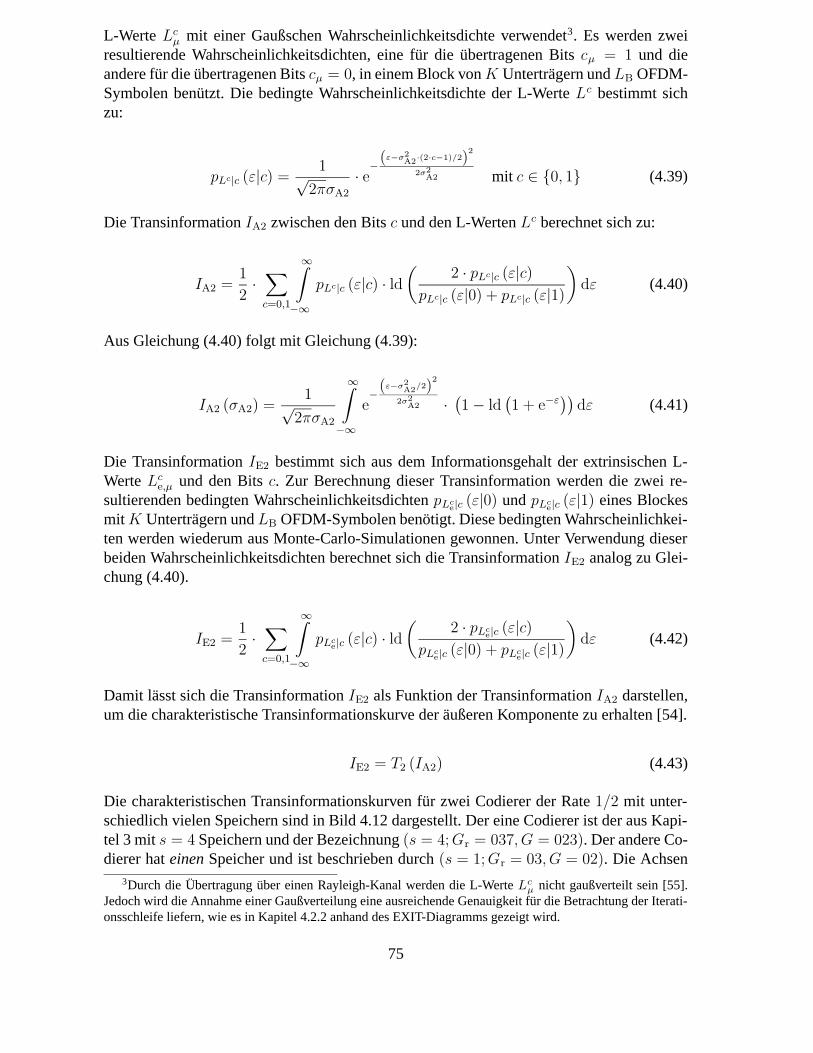
L-Werte Lcµ mit einer Gaußschen Wahrscheinlichkeitsdichte verwendet3. Es werden zwei
resultierende Wahrscheinlichkeitsdichten, eine für die übertragenen Bits cµ = 1 und dieandere für die übertragenen Bits cµ = 0, in einem Block von K Unterträgern und LB OFDM-Symbolen benützt. Die bedingte Wahrscheinlichkeitsdichte der L-Werte Lc bestimmt sichzu:
pLc|c (ε|c) =1√
2πσA2
· e−(ε−σ2
A2·(2·c−1)/2)2
2σ2A2 mit c ∈ {0, 1} (4.39)
Die Transinformation IA2 zwischen den Bits c und den L-Werten Lc berechnet sich zu:
IA2 =1
2·∑
c=0,1
∞∫
−∞
pLc|c (ε|c) · ld(
2 · pLc|c (ε|c)pLc|c (ε|0) + pLc|c (ε|1)
)
dε (4.40)
Aus Gleichung (4.40) folgt mit Gleichung (4.39):
IA2 (σA2) =1√
2πσA2
∞∫
−∞
e−(ε−σ2
A2/2)2
2σ2A2 ·
(
1− ld(
1 + e−ε))
dε (4.41)
Die Transinformation IE2 bestimmt sich aus dem Informationsgehalt der extrinsischen L-Werte Lc
e,µ und den Bits c. Zur Berechnung dieser Transinformation werden die zwei re-sultierenden bedingten Wahrscheinlichkeitsdichten pLc
e|c (ε|0) und pLce|c (ε|1) eines Blockes
mit K Unterträgern und LB OFDM-Symbolen benötigt. Diese bedingten Wahrscheinlichkei-ten werden wiederum aus Monte-Carlo-Simulationen gewonnen. Unter Verwendung dieserbeiden Wahrscheinlichkeitsdichten berechnet sich die Transinformation IE2 analog zu Glei-chung (4.40).
IE2 =1
2·∑
c=0,1
∞∫
−∞
pLce|c (ε|c) · ld
(
2 · pLce|c (ε|c)
pLce|c (ε|0) + pLc
e|c (ε|1)
)
dε (4.42)
Damit lässt sich die Transinformation IE2 als Funktion der Transinformation IA2 darstellen,um die charakteristische Transinformationskurve der äußeren Komponente zu erhalten [54].
IE2 = T2 (IA2) (4.43)
Die charakteristischen Transinformationskurven für zwei Codierer der Rate 1/2 mit unter-schiedlich vielen Speichern sind in Bild 4.12 dargestellt. Der eine Codierer ist der aus Kapi-tel 3 mit s = 4 Speichern und der Bezeichnung (s = 4; Gr = 037, G = 023). Der andere Co-dierer hat einen Speicher und ist beschrieben durch (s = 1; Gr = 03, G = 02). Die Achsen
3Durch die Übertragung über einen Rayleigh-Kanal werden die L-Werte Lcµ nicht gaußverteilt sein [55].
Jedoch wird die Annahme einer Gaußverteilung eine ausreichende Genauigkeit für die Betrachtung der Iterati-onsschleife liefern, wie es in Kapitel 4.2.2 anhand des EXIT-Diagramms gezeigt wird.
75
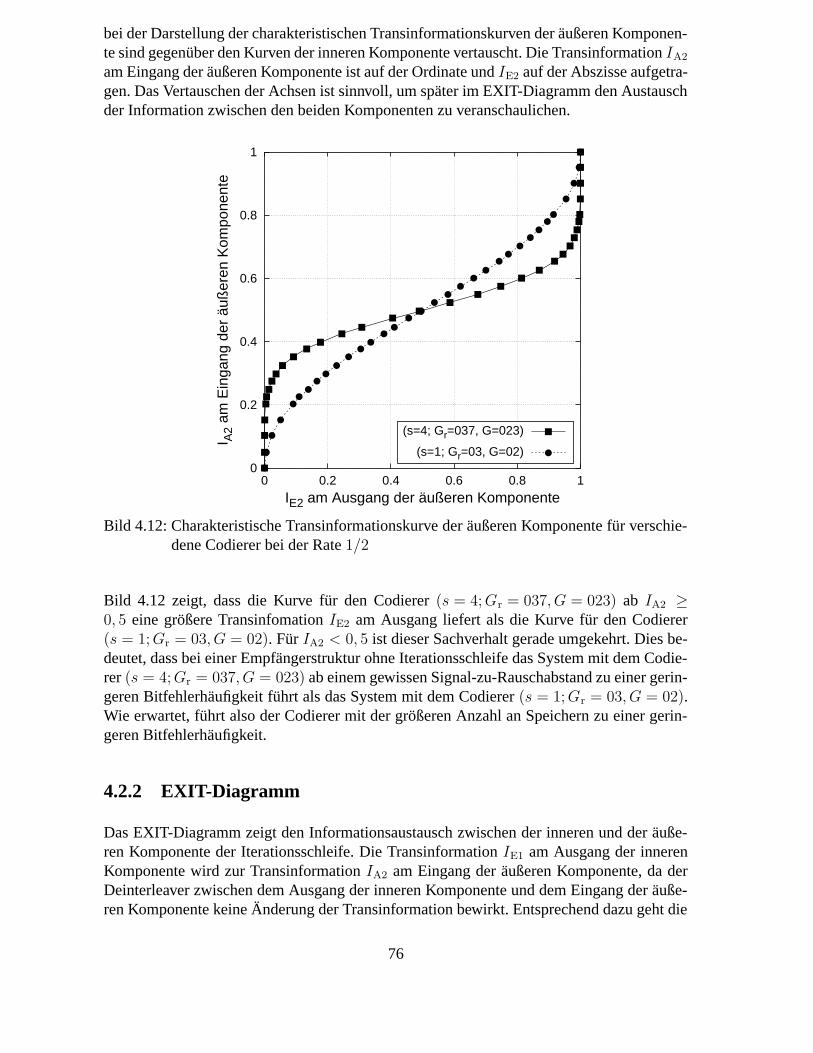
bei der Darstellung der charakteristischen Transinformationskurven der äußeren Komponen-te sind gegenüber den Kurven der inneren Komponente vertauscht. Die Transinformation IA2
am Eingang der äußeren Komponente ist auf der Ordinate und IE2 auf der Abszisse aufgetra-gen. Das Vertauschen der Achsen ist sinnvoll, um später im EXIT-Diagramm den Austauschder Information zwischen den beiden Komponenten zu veranschaulichen.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I A2
am E
inga
ng d
er ä
ußer
en K
ompo
nent
e
IE2 am Ausgang der äußeren Komponente
(s=4; Gr=037, G=023)
(s=1; Gr=03, G=02)
Bild 4.12: Charakteristische Transinformationskurve der äußeren Komponente für verschie-dene Codierer bei der Rate 1/2
Bild 4.12 zeigt, dass die Kurve für den Codierer (s = 4; Gr = 037, G = 023) ab IA2 ≥0, 5 eine größere Transinfomation IE2 am Ausgang liefert als die Kurve für den Codierer(s = 1; Gr = 03, G = 02). Für IA2 < 0, 5 ist dieser Sachverhalt gerade umgekehrt. Dies be-deutet, dass bei einer Empfängerstruktur ohne Iterationsschleife das System mit dem Codie-rer (s = 4; Gr = 037, G = 023) ab einem gewissen Signal-zu-Rauschabstand zu einer gerin-geren Bitfehlerhäufigkeit führt als das System mit dem Codierer (s = 1; Gr = 03, G = 02).Wie erwartet, führt also der Codierer mit der größeren Anzahl an Speichern zu einer gerin-geren Bitfehlerhäufigkeit.
4.2.2 EXIT-Diagramm
Das EXIT-Diagramm zeigt den Informationsaustausch zwischen der inneren und der äuße-ren Komponente der Iterationsschleife. Die Transinformation IE1 am Ausgang der innerenKomponente wird zur Transinformation IA2 am Eingang der äußeren Komponente, da derDeinterleaver zwischen dem Ausgang der inneren Komponente und dem Eingang der äuße-ren Komponente keine Änderung der Transinformation bewirkt. Entsprechend dazu geht die
76
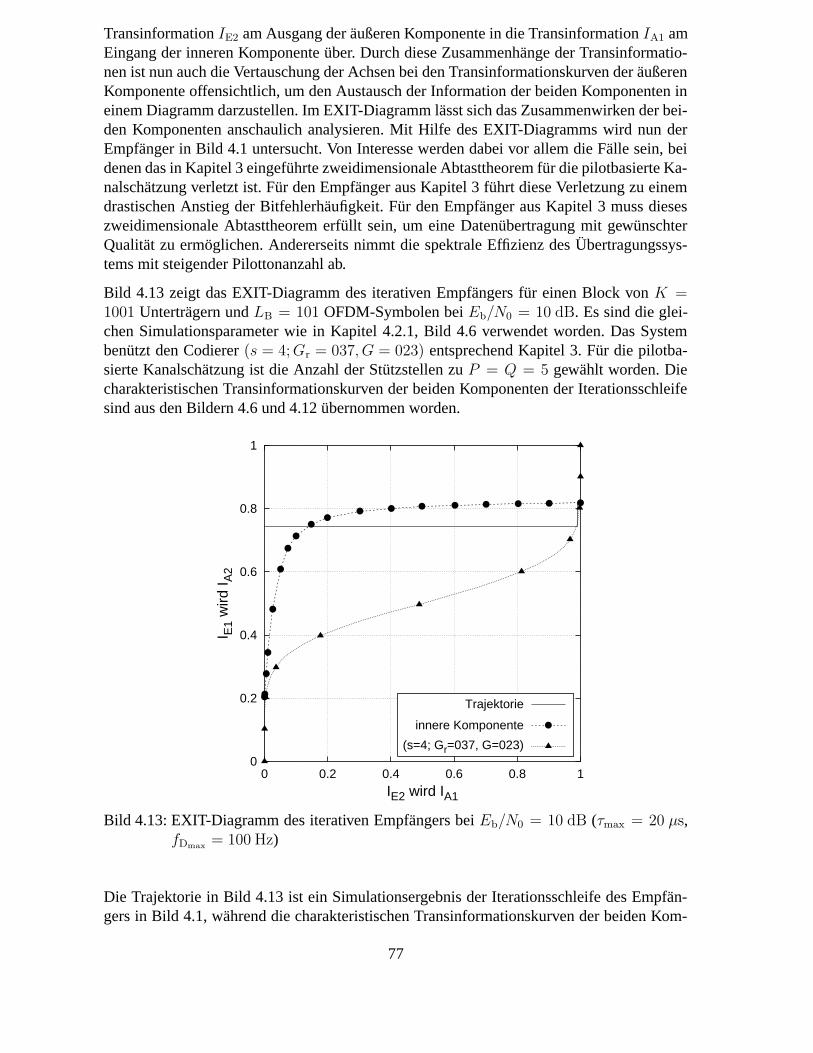
Transinformation IE2 am Ausgang der äußeren Komponente in die Transinformation IA1 amEingang der inneren Komponente über. Durch diese Zusammenhänge der Transinformatio-nen ist nun auch die Vertauschung der Achsen bei den Transinformationskurven der äußerenKomponente offensichtlich, um den Austausch der Information der beiden Komponenten ineinem Diagramm darzustellen. Im EXIT-Diagramm lässt sich das Zusammenwirken der bei-den Komponenten anschaulich analysieren. Mit Hilfe des EXIT-Diagramms wird nun derEmpfänger in Bild 4.1 untersucht. Von Interesse werden dabei vor allem die Fälle sein, beidenen das in Kapitel 3 eingeführte zweidimensionale Abtasttheorem für die pilotbasierte Ka-nalschätzung verletzt ist. Für den Empfänger aus Kapitel 3 führt diese Verletzung zu einemdrastischen Anstieg der Bitfehlerhäufigkeit. Für den Empfänger aus Kapitel 3 muss dieseszweidimensionale Abtasttheorem erfüllt sein, um eine Datenübertragung mit gewünschterQualität zu ermöglichen. Andererseits nimmt die spektrale Effizienz des Übertragungssys-tems mit steigender Pilottonanzahl ab.
Bild 4.13 zeigt das EXIT-Diagramm des iterativen Empfängers für einen Block von K =1001 Unterträgern und LB = 101 OFDM-Symbolen bei Eb/N0 = 10 dB. Es sind die glei-chen Simulationsparameter wie in Kapitel 4.2.1, Bild 4.6 verwendet worden. Das Systembenützt den Codierer (s = 4; Gr = 037, G = 023) entsprechend Kapitel 3. Für die pilotba-sierte Kanalschätzung ist die Anzahl der Stützstellen zu P = Q = 5 gewählt worden. Diecharakteristischen Transinformationskurven der beiden Komponenten der Iterationsschleifesind aus den Bildern 4.6 und 4.12 übernommen worden.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Bild 4.13: EXIT-Diagramm des iterativen Empfängers bei Eb/N0 = 10 dB (τmax = 20 µs,fDmax = 100 Hz)
Die Trajektorie in Bild 4.13 ist ein Simulationsergebnis der Iterationsschleife des Empfän-gers in Bild 4.1, während die charakteristischen Transinformationskurven der beiden Kom-
77
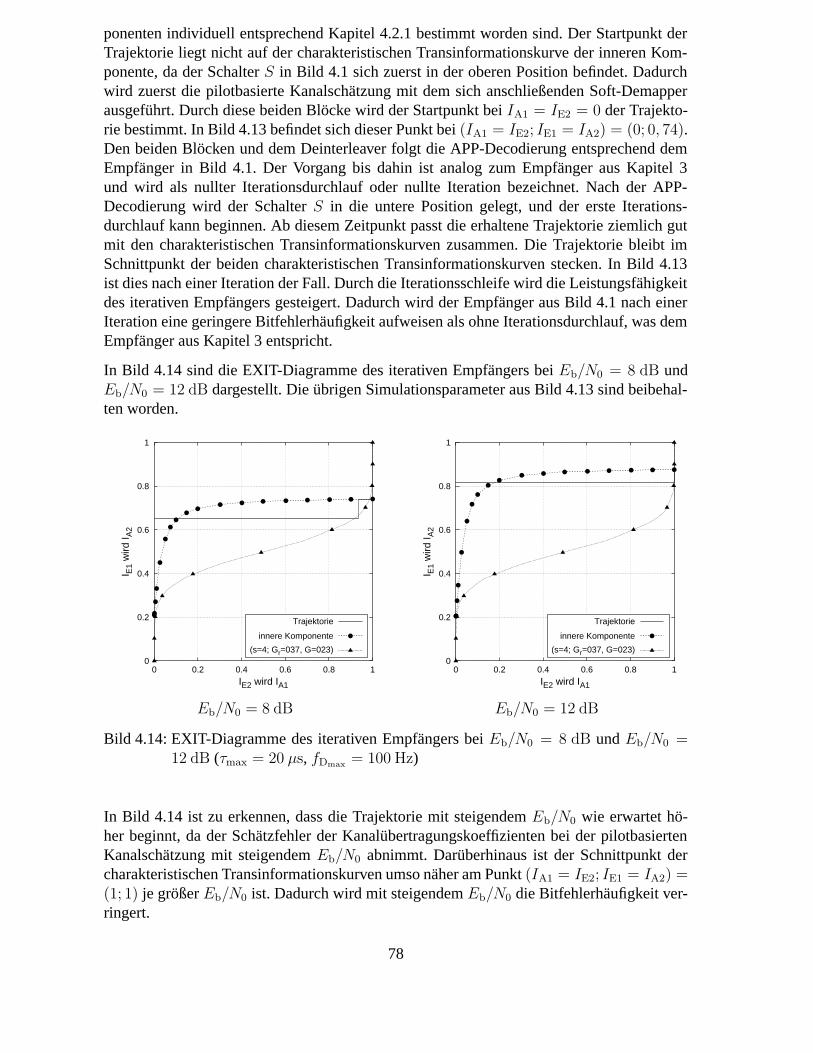
ponenten individuell entsprechend Kapitel 4.2.1 bestimmt worden sind. Der Startpunkt derTrajektorie liegt nicht auf der charakteristischen Transinformationskurve der inneren Kom-ponente, da der Schalter S in Bild 4.1 sich zuerst in der oberen Position befindet. Dadurchwird zuerst die pilotbasierte Kanalschätzung mit dem sich anschließenden Soft-Demapperausgeführt. Durch diese beiden Blöcke wird der Startpunkt bei IA1 = IE2 = 0 der Trajekto-rie bestimmt. In Bild 4.13 befindet sich dieser Punkt bei (IA1 = IE2; IE1 = IA2) = (0; 0, 74).Den beiden Blöcken und dem Deinterleaver folgt die APP-Decodierung entsprechend demEmpfänger in Bild 4.1. Der Vorgang bis dahin ist analog zum Empfänger aus Kapitel 3und wird als nullter Iterationsdurchlauf oder nullte Iteration bezeichnet. Nach der APP-Decodierung wird der Schalter S in die untere Position gelegt, und der erste Iterations-durchlauf kann beginnen. Ab diesem Zeitpunkt passt die erhaltene Trajektorie ziemlich gutmit den charakteristischen Transinformationskurven zusammen. Die Trajektorie bleibt imSchnittpunkt der beiden charakteristischen Transinformationskurven stecken. In Bild 4.13ist dies nach einer Iteration der Fall. Durch die Iterationsschleife wird die Leistungsfähigkeitdes iterativen Empfängers gesteigert. Dadurch wird der Empfänger aus Bild 4.1 nach einerIteration eine geringere Bitfehlerhäufigkeit aufweisen als ohne Iterationsdurchlauf, was demEmpfänger aus Kapitel 3 entspricht.
In Bild 4.14 sind die EXIT-Diagramme des iterativen Empfängers bei Eb/N0 = 8 dB undEb/N0 = 12 dB dargestellt. Die übrigen Simulationsparameter aus Bild 4.13 sind beibehal-ten worden.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Eb/N0 = 8 dB
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Eb/N0 = 12 dB
Bild 4.14: EXIT-Diagramme des iterativen Empfängers bei Eb/N0 = 8 dB und Eb/N0 =12 dB (τmax = 20 µs, fDmax = 100 Hz)
In Bild 4.14 ist zu erkennen, dass die Trajektorie mit steigendem Eb/N0 wie erwartet hö-her beginnt, da der Schätzfehler der Kanalübertragungskoeffizienten bei der pilotbasiertenKanalschätzung mit steigendem Eb/N0 abnimmt. Darüberhinaus ist der Schnittpunkt dercharakteristischen Transinformationskurven umso näher am Punkt (IA1 = IE2; IE1 = IA2) =(1; 1) je größer Eb/N0 ist. Dadurch wird mit steigendem Eb/N0 die Bitfehlerhäufigkeit ver-ringert.
78
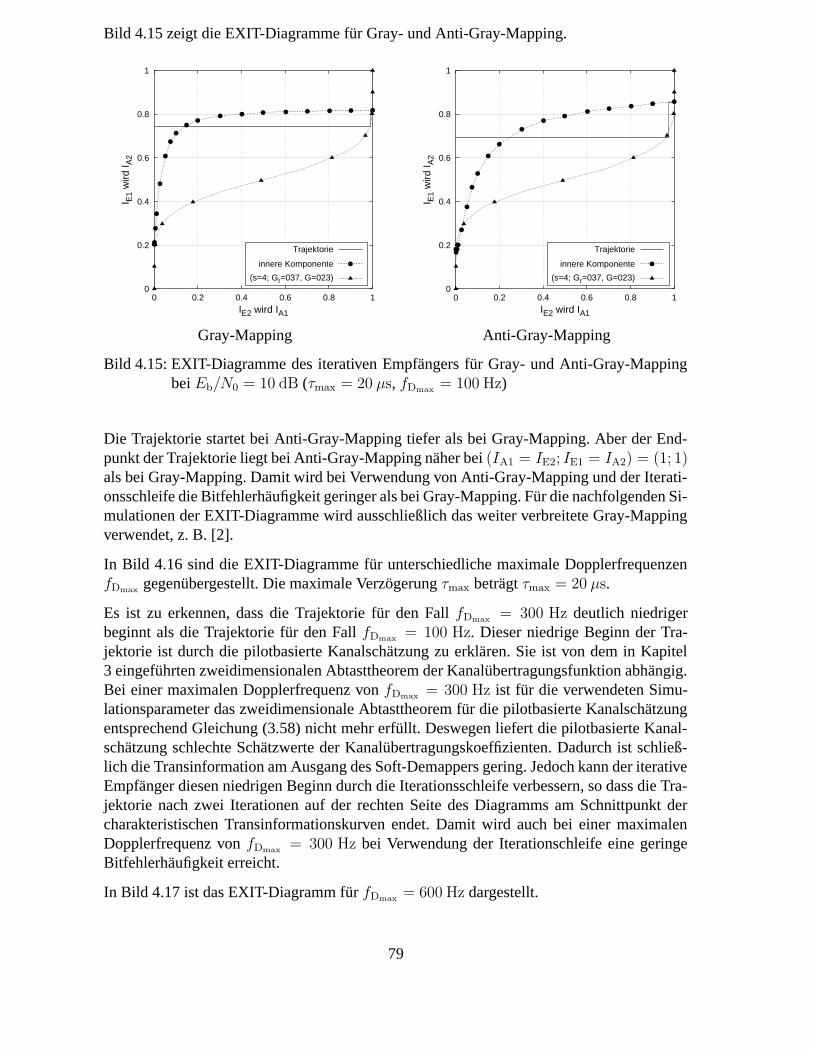
Bild 4.15 zeigt die EXIT-Diagramme für Gray- und Anti-Gray-Mapping.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Gray-Mapping
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Anti-Gray-Mapping
Bild 4.15: EXIT-Diagramme des iterativen Empfängers für Gray- und Anti-Gray-Mappingbei Eb/N0 = 10 dB (τmax = 20 µs, fDmax = 100 Hz)
Die Trajektorie startet bei Anti-Gray-Mapping tiefer als bei Gray-Mapping. Aber der End-punkt der Trajektorie liegt bei Anti-Gray-Mapping näher bei (IA1 = IE2; IE1 = IA2) = (1; 1)als bei Gray-Mapping. Damit wird bei Verwendung von Anti-Gray-Mapping und der Iterati-onsschleife die Bitfehlerhäufigkeit geringer als bei Gray-Mapping. Für die nachfolgenden Si-mulationen der EXIT-Diagramme wird ausschließlich das weiter verbreitete Gray-Mappingverwendet, z. B. [2].
In Bild 4.16 sind die EXIT-Diagramme für unterschiedliche maximale DopplerfrequenzenfDmax gegenübergestellt. Die maximale Verzögerung τmax beträgt τmax = 20 µs.
Es ist zu erkennen, dass die Trajektorie für den Fall fDmax = 300 Hz deutlich niedrigerbeginnt als die Trajektorie für den Fall fDmax = 100 Hz. Dieser niedrige Beginn der Tra-jektorie ist durch die pilotbasierte Kanalschätzung zu erklären. Sie ist von dem in Kapitel3 eingeführten zweidimensionalen Abtasttheorem der Kanalübertragungsfunktion abhängig.Bei einer maximalen Dopplerfrequenz von fDmax = 300 Hz ist für die verwendeten Simu-lationsparameter das zweidimensionale Abtasttheorem für die pilotbasierte Kanalschätzungentsprechend Gleichung (3.58) nicht mehr erfüllt. Deswegen liefert die pilotbasierte Kanal-schätzung schlechte Schätzwerte der Kanalübertragungskoeffizienten. Dadurch ist schließ-lich die Transinformation am Ausgang des Soft-Demappers gering. Jedoch kann der iterativeEmpfänger diesen niedrigen Beginn durch die Iterationsschleife verbessern, so dass die Tra-jektorie nach zwei Iterationen auf der rechten Seite des Diagramms am Schnittpunkt dercharakteristischen Transinformationskurven endet. Damit wird auch bei einer maximalenDopplerfrequenz von fDmax = 300 Hz bei Verwendung der Iterationschleife eine geringeBitfehlerhäufigkeit erreicht.
In Bild 4.17 ist das EXIT-Diagramm für fDmax = 600 Hz dargestellt.
79
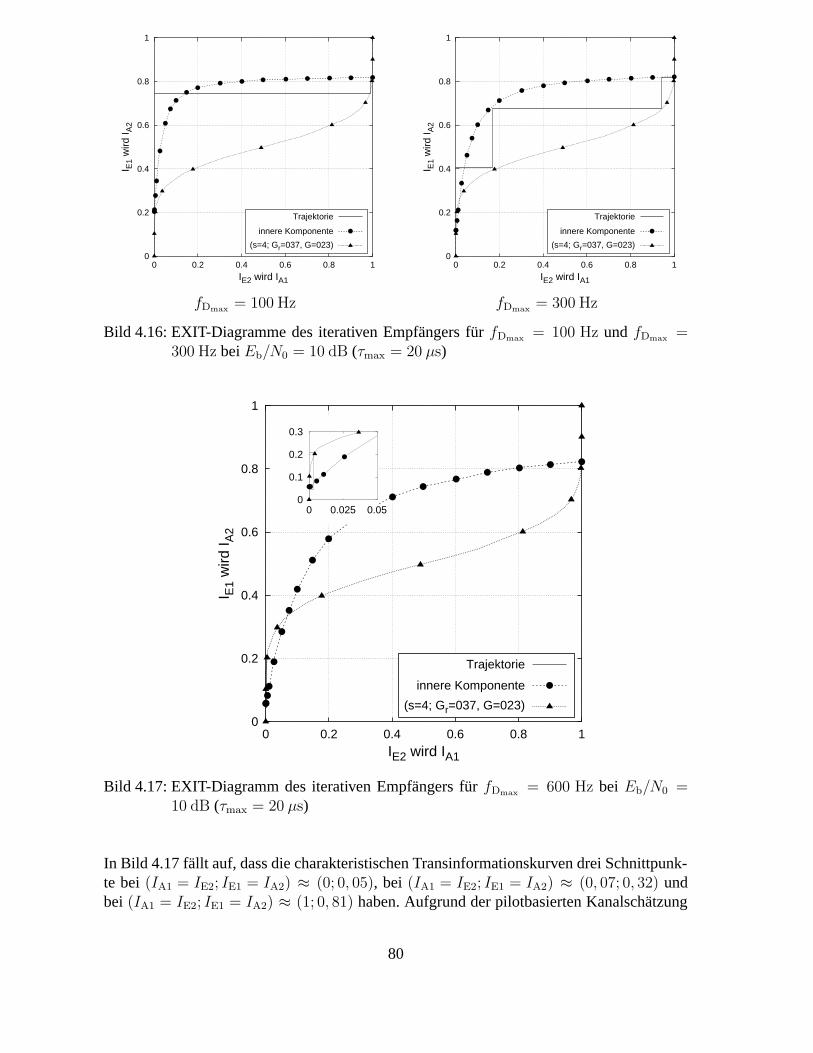
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
fDmax = 100 Hz
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
fDmax = 300 Hz
Bild 4.16: EXIT-Diagramme des iterativen Empfängers für fDmax = 100 Hz und fDmax =300 Hz bei Eb/N0 = 10 dB (τmax = 20 µs)
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
0
0.1
0.2
0.3
0 0.025 0.05
Bild 4.17: EXIT-Diagramm des iterativen Empfängers für fDmax = 600 Hz bei Eb/N0 =10 dB (τmax = 20 µs)
In Bild 4.17 fällt auf, dass die charakteristischen Transinformationskurven drei Schnittpunk-te bei (IA1 = IE2; IE1 = IA2) ≈ (0; 0, 05), bei (IA1 = IE2; IE1 = IA2) ≈ (0, 07; 0, 32) undbei (IA1 = IE2; IE1 = IA2) ≈ (1; 0, 81) haben. Aufgrund der pilotbasierten Kanalschätzung
80
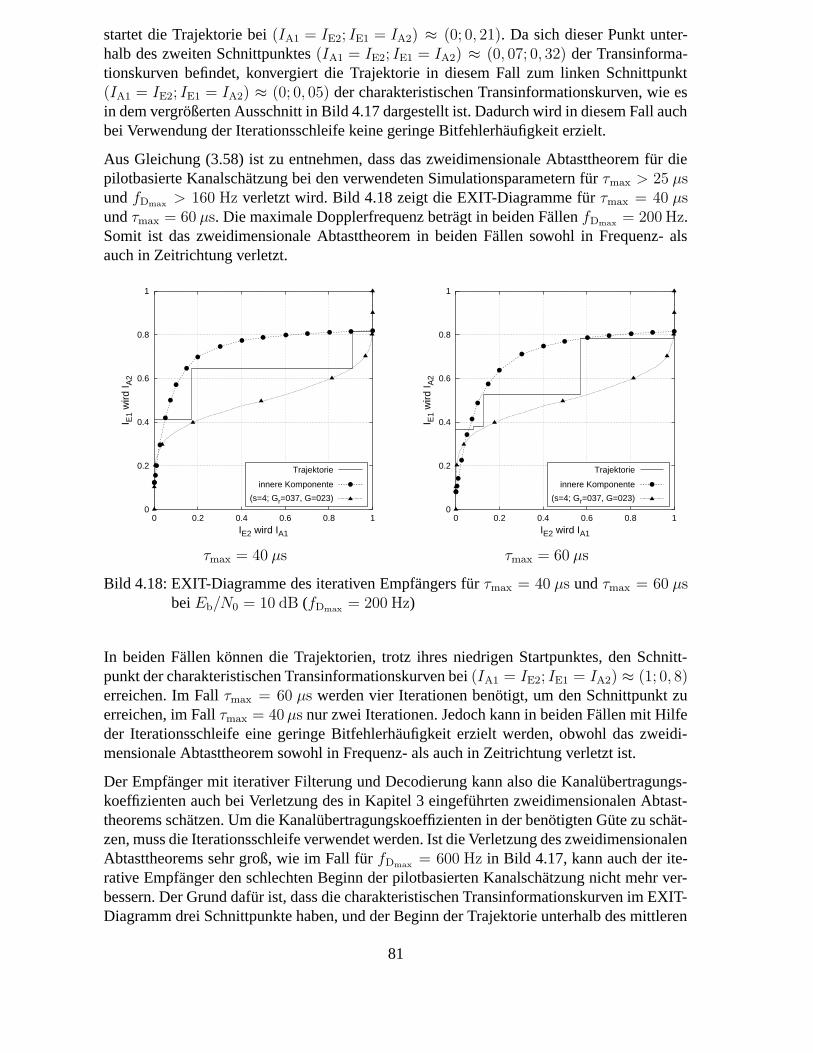
startet die Trajektorie bei (IA1 = IE2; IE1 = IA2) ≈ (0; 0, 21). Da sich dieser Punkt unter-halb des zweiten Schnittpunktes (IA1 = IE2; IE1 = IA2) ≈ (0, 07; 0, 32) der Transinforma-tionskurven befindet, konvergiert die Trajektorie in diesem Fall zum linken Schnittpunkt(IA1 = IE2; IE1 = IA2) ≈ (0; 0, 05) der charakteristischen Transinformationskurven, wie esin dem vergrößerten Ausschnitt in Bild 4.17 dargestellt ist. Dadurch wird in diesem Fall auchbei Verwendung der Iterationsschleife keine geringe Bitfehlerhäufigkeit erzielt.
Aus Gleichung (3.58) ist zu entnehmen, dass das zweidimensionale Abtasttheorem für diepilotbasierte Kanalschätzung bei den verwendeten Simulationsparametern für τmax > 25 µsund fDmax > 160 Hz verletzt wird. Bild 4.18 zeigt die EXIT-Diagramme für τmax = 40 µsund τmax = 60 µs. Die maximale Dopplerfrequenz beträgt in beiden Fällen fDmax = 200 Hz.Somit ist das zweidimensionale Abtasttheorem in beiden Fällen sowohl in Frequenz- alsauch in Zeitrichtung verletzt.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
τmax = 40 µs
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
τmax = 60 µs
Bild 4.18: EXIT-Diagramme des iterativen Empfängers für τmax = 40 µs und τmax = 60 µsbei Eb/N0 = 10 dB (fDmax = 200 Hz)
In beiden Fällen können die Trajektorien, trotz ihres niedrigen Startpunktes, den Schnitt-punkt der charakteristischen Transinformationskurven bei (IA1 = IE2; IE1 = IA2) ≈ (1; 0, 8)erreichen. Im Fall τmax = 60 µs werden vier Iterationen benötigt, um den Schnittpunkt zuerreichen, im Fall τmax = 40 µs nur zwei Iterationen. Jedoch kann in beiden Fällen mit Hilfeder Iterationsschleife eine geringe Bitfehlerhäufigkeit erzielt werden, obwohl das zweidi-mensionale Abtasttheorem sowohl in Frequenz- als auch in Zeitrichtung verletzt ist.
Der Empfänger mit iterativer Filterung und Decodierung kann also die Kanalübertragungs-koeffizienten auch bei Verletzung des in Kapitel 3 eingeführten zweidimensionalen Abtast-theorems schätzen. Um die Kanalübertragungskoeffizienten in der benötigten Güte zu schät-zen, muss die Iterationsschleife verwendet werden. Ist die Verletzung des zweidimensionalenAbtasttheorems sehr groß, wie im Fall für fDmax = 600 Hz in Bild 4.17, kann auch der ite-rative Empfänger den schlechten Beginn der pilotbasierten Kanalschätzung nicht mehr ver-bessern. Der Grund dafür ist, dass die charakteristischen Transinformationskurven im EXIT-Diagramm drei Schnittpunkte haben, und der Beginn der Trajektorie unterhalb des mittleren
81
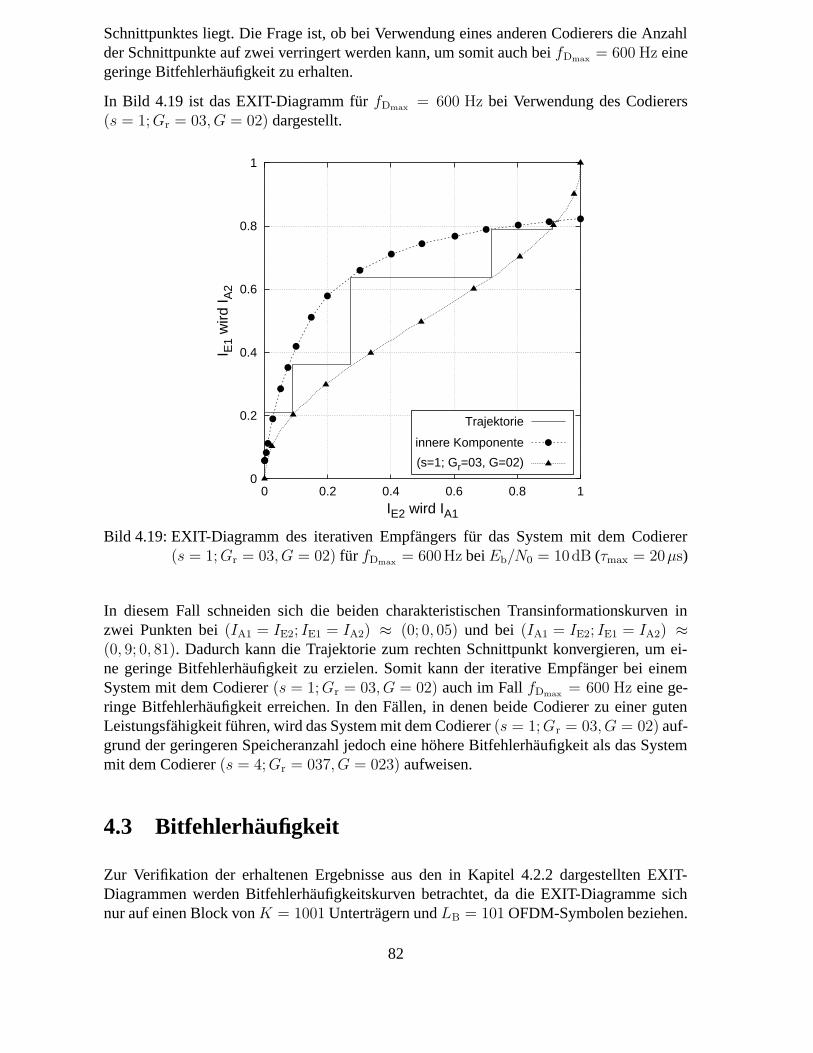
Schnittpunktes liegt. Die Frage ist, ob bei Verwendung eines anderen Codierers die Anzahlder Schnittpunkte auf zwei verringert werden kann, um somit auch bei fDmax = 600 Hz einegeringe Bitfehlerhäufigkeit zu erhalten.
In Bild 4.19 ist das EXIT-Diagramm für fDmax = 600 Hz bei Verwendung des Codierers(s = 1; Gr = 03, G = 02) dargestellt.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=1; Gr=03, G=02)
Bild 4.19: EXIT-Diagramm des iterativen Empfängers für das System mit dem Codierer(s = 1; Gr = 03, G = 02) für fDmax = 600Hz bei Eb/N0 = 10dB (τmax = 20µs)
In diesem Fall schneiden sich die beiden charakteristischen Transinformationskurven inzwei Punkten bei (IA1 = IE2; IE1 = IA2) ≈ (0; 0, 05) und bei (IA1 = IE2; IE1 = IA2) ≈(0, 9; 0, 81). Dadurch kann die Trajektorie zum rechten Schnittpunkt konvergieren, um ei-ne geringe Bitfehlerhäufigkeit zu erzielen. Somit kann der iterative Empfänger bei einemSystem mit dem Codierer (s = 1; Gr = 03, G = 02) auch im Fall fDmax = 600 Hz eine ge-ringe Bitfehlerhäufigkeit erreichen. In den Fällen, in denen beide Codierer zu einer gutenLeistungsfähigkeit führen, wird das System mit dem Codierer (s = 1; Gr = 03, G = 02) auf-grund der geringeren Speicheranzahl jedoch eine höhere Bitfehlerhäufigkeit als das Systemmit dem Codierer (s = 4; Gr = 037, G = 023) aufweisen.
4.3 Bitfehlerhäufigkeit
Zur Verifikation der erhaltenen Ergebnisse aus den in Kapitel 4.2.2 dargestellten EXIT-Diagrammen werden Bitfehlerhäufigkeitskurven betrachtet, da die EXIT-Diagramme sichnur auf einen Block von K = 1001 Unterträgern und LB = 101 OFDM-Symbolen beziehen.
82
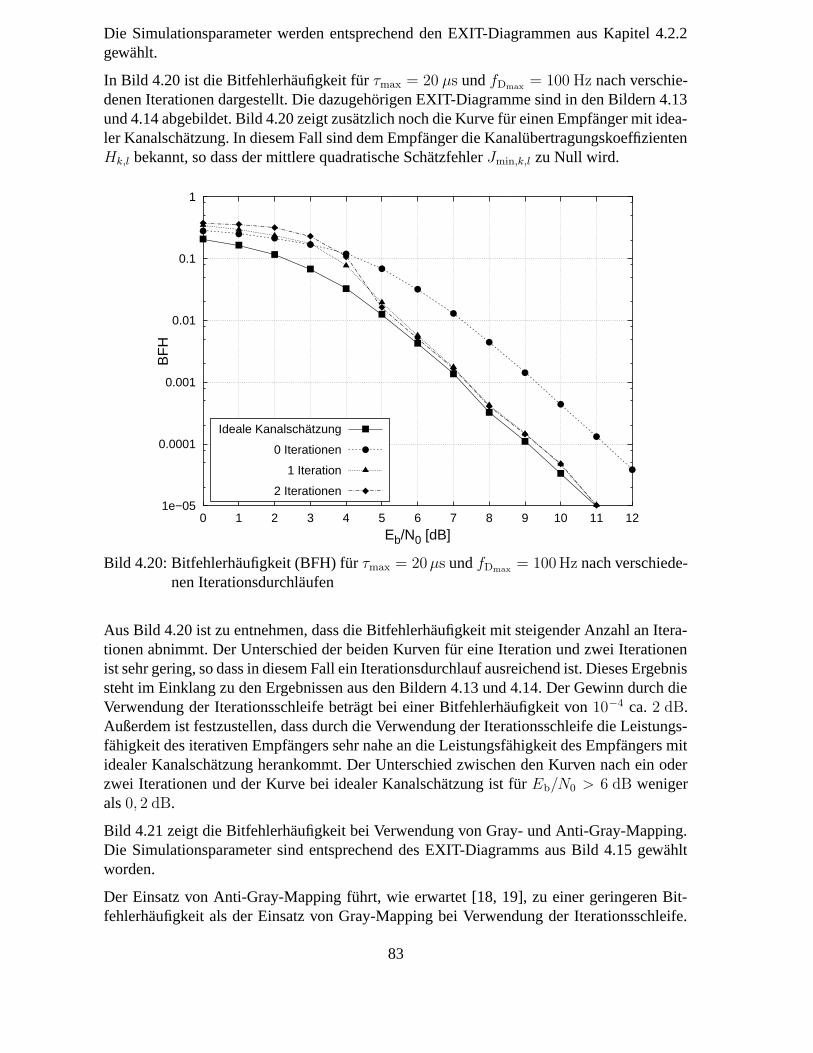
Die Simulationsparameter werden entsprechend den EXIT-Diagrammen aus Kapitel 4.2.2gewählt.
In Bild 4.20 ist die Bitfehlerhäufigkeit für τmax = 20 µs und fDmax = 100 Hz nach verschie-denen Iterationen dargestellt. Die dazugehörigen EXIT-Diagramme sind in den Bildern 4.13und 4.14 abgebildet. Bild 4.20 zeigt zusätzlich noch die Kurve für einen Empfänger mit idea-ler Kanalschätzung. In diesem Fall sind dem Empfänger die KanalübertragungskoeffizientenHk,l bekannt, so dass der mittlere quadratische Schätzfehler Jmin,k,l zu Null wird.
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
Ideale Kanalschätzung
0 Iterationen
1 Iteration
2 Iterationen
Bild 4.20: Bitfehlerhäufigkeit (BFH) für τmax = 20µs und fDmax = 100Hz nach verschiede-nen Iterationsdurchläufen
Aus Bild 4.20 ist zu entnehmen, dass die Bitfehlerhäufigkeit mit steigender Anzahl an Itera-tionen abnimmt. Der Unterschied der beiden Kurven für eine Iteration und zwei Iterationenist sehr gering, so dass in diesem Fall ein Iterationsdurchlauf ausreichend ist. Dieses Ergebnissteht im Einklang zu den Ergebnissen aus den Bildern 4.13 und 4.14. Der Gewinn durch dieVerwendung der Iterationsschleife beträgt bei einer Bitfehlerhäufigkeit von 10−4 ca. 2 dB.Außerdem ist festzustellen, dass durch die Verwendung der Iterationsschleife die Leistungs-fähigkeit des iterativen Empfängers sehr nahe an die Leistungsfähigkeit des Empfängers mitidealer Kanalschätzung herankommt. Der Unterschied zwischen den Kurven nach ein oderzwei Iterationen und der Kurve bei idealer Kanalschätzung ist für Eb/N0 > 6 dB wenigerals 0, 2 dB.
Bild 4.21 zeigt die Bitfehlerhäufigkeit bei Verwendung von Gray- und Anti-Gray-Mapping.Die Simulationsparameter sind entsprechend des EXIT-Diagramms aus Bild 4.15 gewähltworden.
Der Einsatz von Anti-Gray-Mapping führt, wie erwartet [18, 19], zu einer geringeren Bit-fehlerhäufigkeit als der Einsatz von Gray-Mapping bei Verwendung der Iterationsschleife.
83
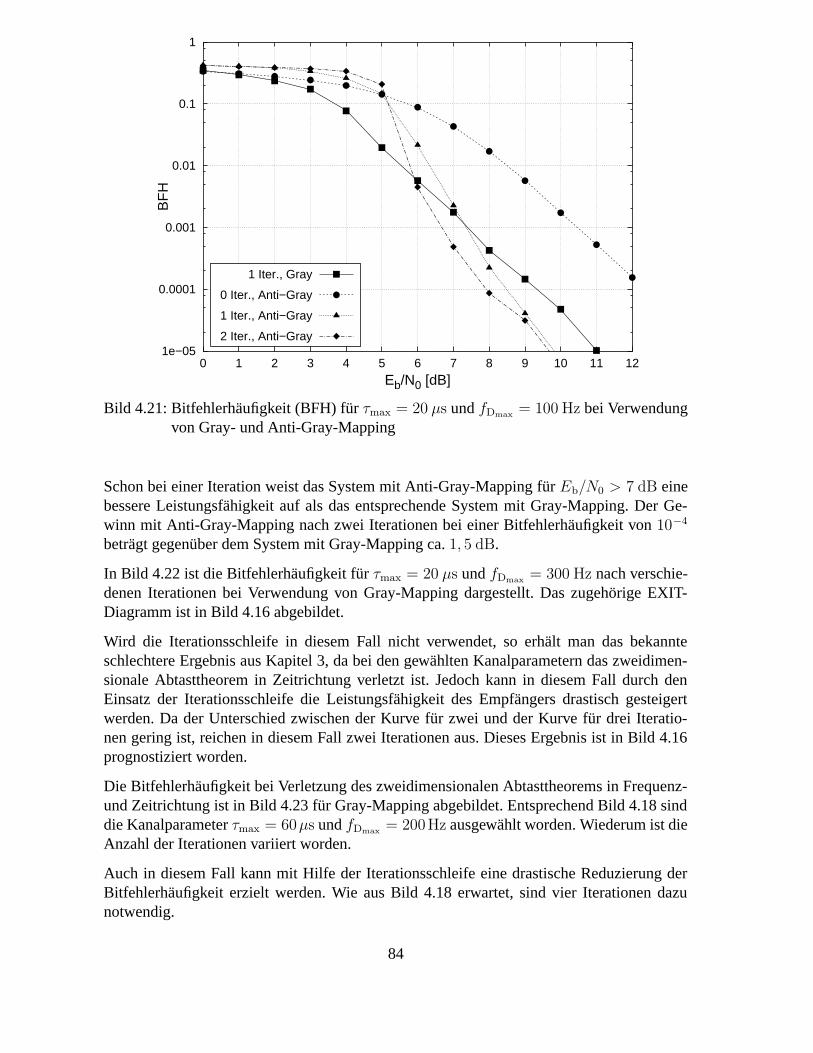
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
1 Iter., Gray
0 Iter., Anti−Gray
1 Iter., Anti−Gray
2 Iter., Anti−Gray
Bild 4.21: Bitfehlerhäufigkeit (BFH) für τmax = 20 µs und fDmax = 100 Hz bei Verwendungvon Gray- und Anti-Gray-Mapping
Schon bei einer Iteration weist das System mit Anti-Gray-Mapping für Eb/N0 > 7 dB einebessere Leistungsfähigkeit auf als das entsprechende System mit Gray-Mapping. Der Ge-winn mit Anti-Gray-Mapping nach zwei Iterationen bei einer Bitfehlerhäufigkeit von 10−4
beträgt gegenüber dem System mit Gray-Mapping ca. 1, 5 dB.
In Bild 4.22 ist die Bitfehlerhäufigkeit für τmax = 20 µs und fDmax = 300 Hz nach verschie-denen Iterationen bei Verwendung von Gray-Mapping dargestellt. Das zugehörige EXIT-Diagramm ist in Bild 4.16 abgebildet.
Wird die Iterationsschleife in diesem Fall nicht verwendet, so erhält man das bekannteschlechtere Ergebnis aus Kapitel 3, da bei den gewählten Kanalparametern das zweidimen-sionale Abtasttheorem in Zeitrichtung verletzt ist. Jedoch kann in diesem Fall durch denEinsatz der Iterationsschleife die Leistungsfähigkeit des Empfängers drastisch gesteigertwerden. Da der Unterschied zwischen der Kurve für zwei und der Kurve für drei Iteratio-nen gering ist, reichen in diesem Fall zwei Iterationen aus. Dieses Ergebnis ist in Bild 4.16prognostiziert worden.
Die Bitfehlerhäufigkeit bei Verletzung des zweidimensionalen Abtasttheorems in Frequenz-und Zeitrichtung ist in Bild 4.23 für Gray-Mapping abgebildet. Entsprechend Bild 4.18 sinddie Kanalparameter τmax = 60µs und fDmax = 200Hz ausgewählt worden. Wiederum ist dieAnzahl der Iterationen variiert worden.
Auch in diesem Fall kann mit Hilfe der Iterationsschleife eine drastische Reduzierung derBitfehlerhäufigkeit erzielt werden. Wie aus Bild 4.18 erwartet, sind vier Iterationen dazunotwendig.
84
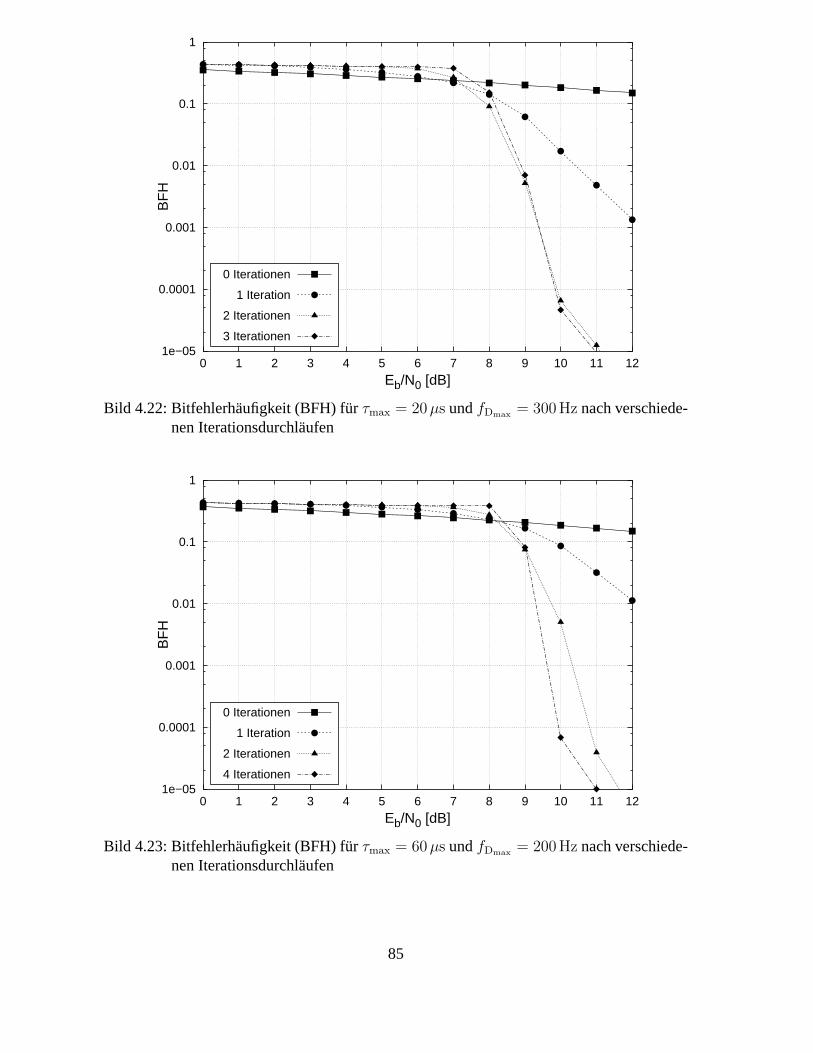
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
0 Iterationen
1 Iteration
2 Iterationen
3 Iterationen
Bild 4.22: Bitfehlerhäufigkeit (BFH) für τmax = 20µs und fDmax = 300Hz nach verschiede-nen Iterationsdurchläufen
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
0 Iterationen
1 Iteration
2 Iterationen
4 Iterationen
Bild 4.23: Bitfehlerhäufigkeit (BFH) für τmax = 60µs und fDmax = 200Hz nach verschiede-nen Iterationsdurchläufen
85
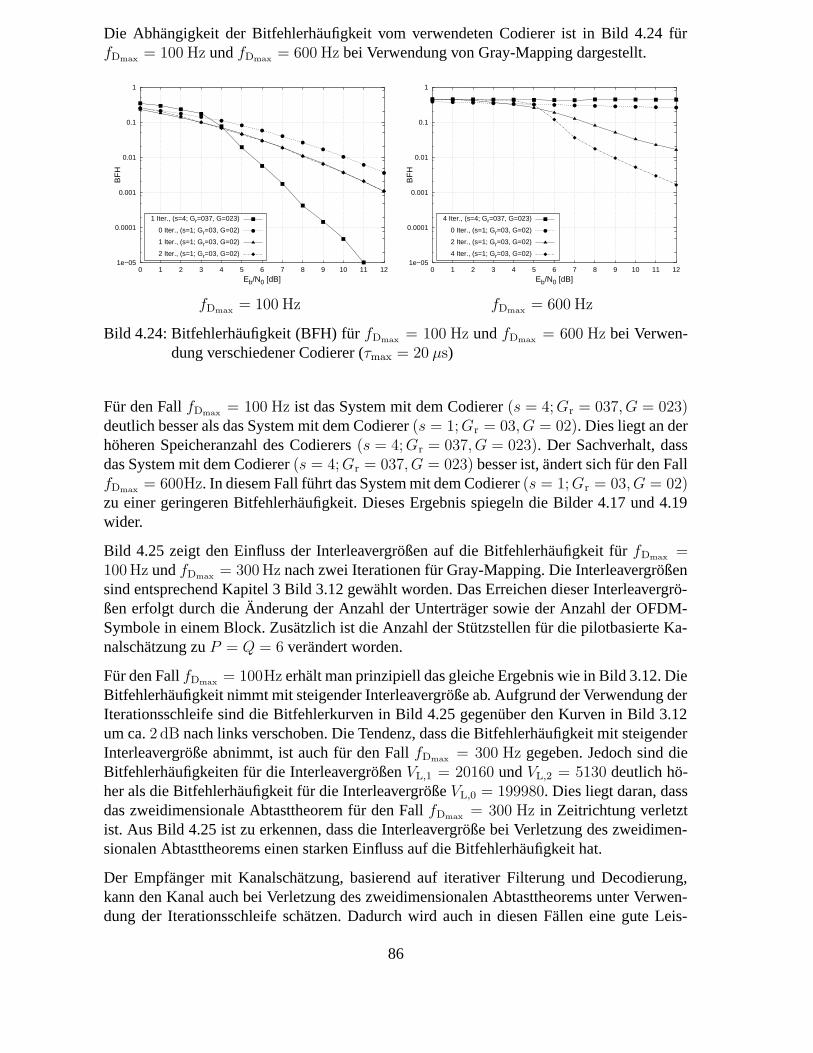
Die Abhängigkeit der Bitfehlerhäufigkeit vom verwendeten Codierer ist in Bild 4.24 fürfDmax = 100 Hz und fDmax = 600 Hz bei Verwendung von Gray-Mapping dargestellt.
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
1 Iter., (s=4; Gr=037, G=023)
0 Iter., (s=1; Gr=03, G=02)
1 Iter., (s=1; Gr=03, G=02)
2 Iter., (s=1; Gr=03, G=02)
fDmax = 100 Hz
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
4 Iter., (s=4; Gr=037, G=023)
0 Iter., (s=1; Gr=03, G=02)
2 Iter., (s=1; Gr=03, G=02)
4 Iter., (s=1; Gr=03, G=02)
fDmax = 600 Hz
Bild 4.24: Bitfehlerhäufigkeit (BFH) für fDmax = 100 Hz und fDmax = 600 Hz bei Verwen-dung verschiedener Codierer (τmax = 20 µs)
Für den Fall fDmax = 100 Hz ist das System mit dem Codierer (s = 4; Gr = 037, G = 023)deutlich besser als das System mit dem Codierer (s = 1; Gr = 03, G = 02). Dies liegt an derhöheren Speicheranzahl des Codierers (s = 4; Gr = 037, G = 023). Der Sachverhalt, dassdas System mit dem Codierer (s = 4; Gr = 037, G = 023) besser ist, ändert sich für den FallfDmax = 600Hz. In diesem Fall führt das System mit dem Codierer (s = 1; Gr = 03, G = 02)zu einer geringeren Bitfehlerhäufigkeit. Dieses Ergebnis spiegeln die Bilder 4.17 und 4.19wider.
Bild 4.25 zeigt den Einfluss der Interleavergrößen auf die Bitfehlerhäufigkeit für fDmax =100 Hz und fDmax = 300 Hz nach zwei Iterationen für Gray-Mapping. Die Interleavergrößensind entsprechend Kapitel 3 Bild 3.12 gewählt worden. Das Erreichen dieser Interleavergrö-ßen erfolgt durch die Änderung der Anzahl der Unterträger sowie der Anzahl der OFDM-Symbole in einem Block. Zusätzlich ist die Anzahl der Stützstellen für die pilotbasierte Ka-nalschätzung zu P = Q = 6 verändert worden.
Für den Fall fDmax = 100Hz erhält man prinzipiell das gleiche Ergebnis wie in Bild 3.12. DieBitfehlerhäufigkeit nimmt mit steigender Interleavergröße ab. Aufgrund der Verwendung derIterationsschleife sind die Bitfehlerkurven in Bild 4.25 gegenüber den Kurven in Bild 3.12um ca. 2 dB nach links verschoben. Die Tendenz, dass die Bitfehlerhäufigkeit mit steigenderInterleavergröße abnimmt, ist auch für den Fall fDmax = 300 Hz gegeben. Jedoch sind dieBitfehlerhäufigkeiten für die Interleavergrößen VL,1 = 20160 und VL,2 = 5130 deutlich hö-her als die Bitfehlerhäufigkeit für die Interleavergröße VL,0 = 199980. Dies liegt daran, dassdas zweidimensionale Abtasttheorem für den Fall fDmax = 300 Hz in Zeitrichtung verletztist. Aus Bild 4.25 ist zu erkennen, dass die Interleavergröße bei Verletzung des zweidimen-sionalen Abtasttheorems einen starken Einfluss auf die Bitfehlerhäufigkeit hat.
Der Empfänger mit Kanalschätzung, basierend auf iterativer Filterung und Decodierung,kann den Kanal auch bei Verletzung des zweidimensionalen Abtasttheorems unter Verwen-dung der Iterationsschleife schätzen. Dadurch wird auch in diesen Fällen eine gute Leis-
86
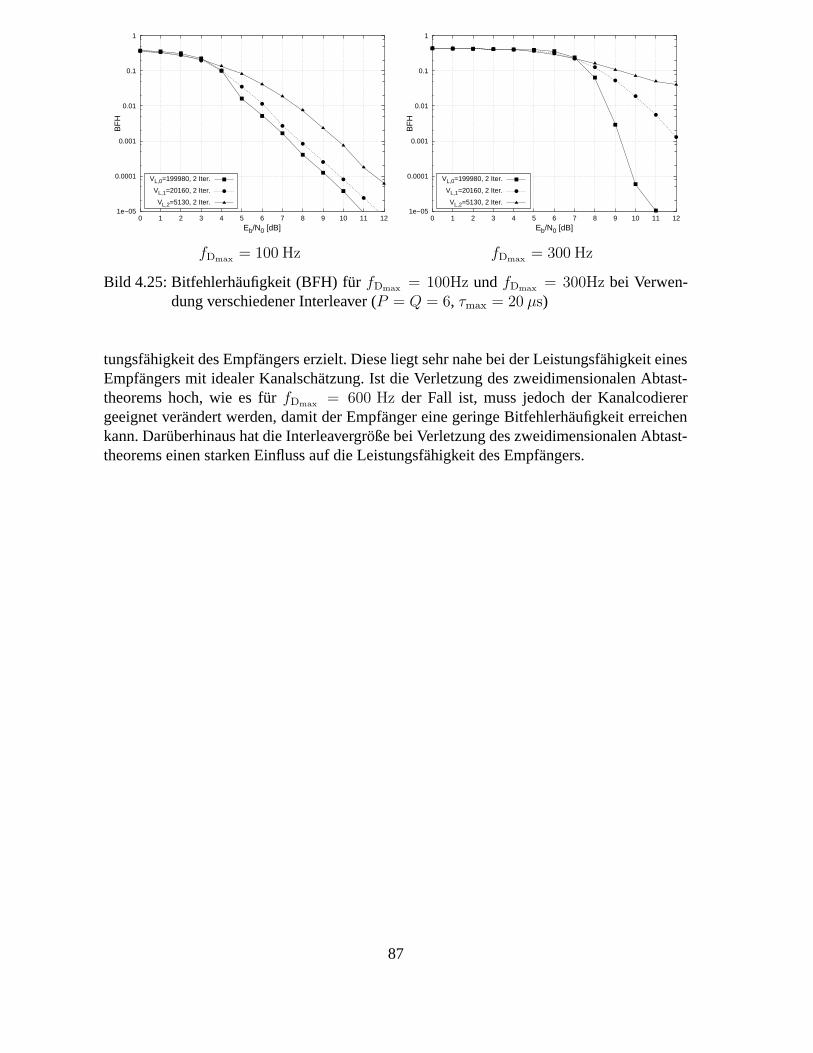
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
VL,0=199980, 2 Iter.
VL,1=20160, 2 Iter.
VL,2=5130, 2 Iter.
fDmax = 100 Hz
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
VL,0=199980, 2 Iter.
VL,1=20160, 2 Iter.
VL,2=5130, 2 Iter.
fDmax = 300 Hz
Bild 4.25: Bitfehlerhäufigkeit (BFH) für fDmax = 100Hz und fDmax = 300Hz bei Verwen-dung verschiedener Interleaver (P = Q = 6, τmax = 20 µs)
tungsfähigkeit des Empfängers erzielt. Diese liegt sehr nahe bei der Leistungsfähigkeit einesEmpfängers mit idealer Kanalschätzung. Ist die Verletzung des zweidimensionalen Abtast-theorems hoch, wie es für fDmax = 600 Hz der Fall ist, muss jedoch der Kanalcodierergeeignet verändert werden, damit der Empfänger eine geringe Bitfehlerhäufigkeit erreichenkann. Darüberhinaus hat die Interleavergröße bei Verletzung des zweidimensionalen Abtast-theorems einen starken Einfluss auf die Leistungsfähigkeit des Empfängers.
87
88
Kapitel 5
APP–Kanalschätzung
In Kapitel 4 ist der Empfänger mit Kanalschätzung, basierend auf iterativer Filterung undDecodierung, untersucht worden. Dieser Empfänger zeigte gegenüber dem Empfänger oh-ne Iterationsschleife aus Kapitel 3 deutliche Vorteile in den Fällen, in denen das zweidi-mensionale Abtasttheorem der Kanalübertragungsfunktion verletzt ist. Dennoch weist die-ser iterative Empfänger eine Abhängigkeit von dem zweidimensionalen Abtasttheorem derKanalübertragungsfunktion auf. Jedoch ist diese Abhängigkeit bei Weitem nicht mehr soausgeprägt wie beim Empfänger aus Kapitel 3, wie anhand von Simulationen erörtert wor-den ist. In Kapitel 4 ist bei sehr hohen maximalen Dopplerfrequenzen eine Abhängigkeitvom zweidimensionalen Abtasttheorem der Kanalübertragungsfunktion aufgezeigt worden.Diese Abhängigkeit resultiert aus der Verwendung der pilotbasierten Kanalschätzung, die alsStartwert in der Detektionsschleife benützt wird. Um in diesen Fällen zu niedrigen Bitfeh-lerhäufigkeiten zu gelangen, musste der äußere Kanaldecodierer geeignet verändert werden.
Eine weitere Möglichkeit, um die Kanalübertragungskoeffizienten zu schätzen und gleich-zeitig die Entzerrung vorzunehmen, ist in [22] erläutert worden. Dieses Verfahren, das Schät-zung und Entzerrung kombiniert, ist anhand eines DPSK-Übertragungssystems mit Einträ-germodulation vorgestellt worden. Die Übertragung erfolgt über einen nicht frequenzselek-tiven Kanal. Das Grundprinzip dieser APP-Schätzmethode ist der Aufbau eines erweitertenTrellises im Empfänger. Mit Hilfe des erweiterten Trellises werden die Schätzung der Ka-nalübertragungskoeffizienten und die Entzerrung gleichzeitig mittels des APP-Algorithmus-ses durchgeführt. Dazu werden sowohl die Kontinuität des nicht frequenzselektiven Kanalsals auch das begrenzte Symbolalphabet der Sendesymbole ausgenützt. Diese Methode zurSchätzung und Detektion lässt sich in eine serielle Verknüpfung mit dem äußeren Kanalde-codierer einbetten, um mit Hilfe der Iterationsschleife die Leistungsfähigkeit des Empfängerssukzessive zu verbessern [22].
Das Grundprinzip des in [22] vorgestellten Verfahrens wird in diesem Kapitel auf ein OFDM-Übertragungssystem mit kohärenter Modulation erweitert. Dazu wird ein zweidimensionalerAPP-Kanalschätzer verwendet, der sich aus dem Zusammenschluss zweier eindimensiona-ler APP-Kanalschätzer ergibt. Dieser zweidimensionale APP-Kanalschätzer wird analog zu[22] in einer seriellen Verkettung mit dem äußeren Kanaldecodierer betrieben. EntsprechendKapitel 4 wird das Verhalten dieser APP-Kanalschätzung bei Verletzung des zweidimensio-nalen Abtasttheorems der Kanalübertragungsfunktion von besonderem Interesse sein.
89
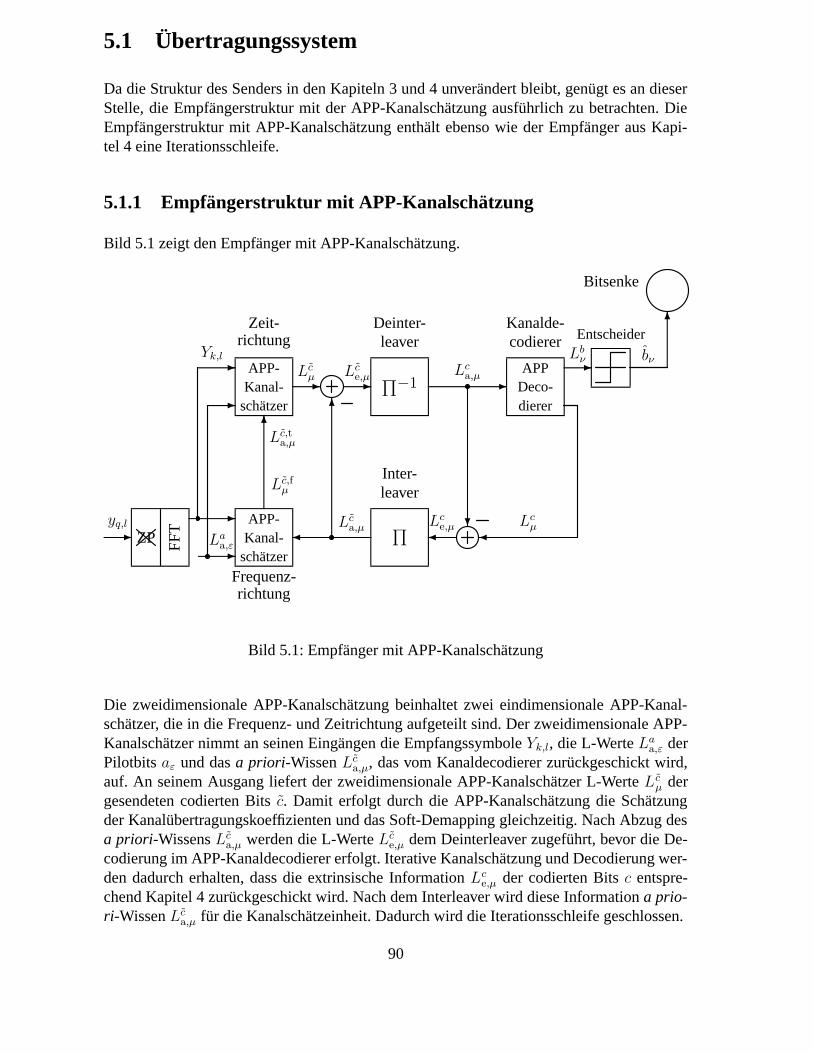
5.1 Übertragungssystem
Da die Struktur des Senders in den Kapiteln 3 und 4 unverändert bleibt, genügt es an dieserStelle, die Empfängerstruktur mit der APP-Kanalschätzung ausführlich zu betrachten. DieEmpfängerstruktur mit APP-Kanalschätzung enthält ebenso wie der Empfänger aus Kapi-tel 4 eine Iterationsschleife.
5.1.1 Empfängerstruktur mit APP-Kanalschätzung
Bild 5.1 zeigt den Empfänger mit APP-Kanalschätzung.
-yq,l
ZP FFT
-
-La
a,ε
-Yk,l
-
APP-Kanal-
schätzer
Zeit-richtung
-Lc
µ -Lc
e,µ
Π−1
Deinter-leaver
-Lc
a,µAPP
Deco-dierer
Kanalde-codierer
-Lb
ν
Entscheider6
bν
Bitsenke
�Lc
µ?�Lc
e,µ
Π
Inter-leaver
�Lc
a,µ
66
Lc,fµ
Lc,ta,µ
APP-Kanal-
schätzer
Frequenz-richtung
Bild 5.1: Empfänger mit APP-Kanalschätzung
Die zweidimensionale APP-Kanalschätzung beinhaltet zwei eindimensionale APP-Kanal-schätzer, die in die Frequenz- und Zeitrichtung aufgeteilt sind. Der zweidimensionale APP-Kanalschätzer nimmt an seinen Eingängen die Empfangssymbole Yk,l, die L-Werte La
a,ε derPilotbits aε und das a priori-Wissen Lc
a,µ, das vom Kanaldecodierer zurückgeschickt wird,auf. An seinem Ausgang liefert der zweidimensionale APP-Kanalschätzer L-Werte Lc
µ dergesendeten codierten Bits c. Damit erfolgt durch die APP-Kanalschätzung die Schätzungder Kanalübertragungskoeffizienten und das Soft-Demapping gleichzeitig. Nach Abzug desa priori-Wissens Lc
a,µ werden die L-Werte Lce,µ dem Deinterleaver zugeführt, bevor die De-
codierung im APP-Kanaldecodierer erfolgt. Iterative Kanalschätzung und Decodierung wer-den dadurch erhalten, dass die extrinsische Information Lc
e,µ der codierten Bits c entspre-chend Kapitel 4 zurückgeschickt wird. Nach dem Interleaver wird diese Information a prio-ri-Wissen Lc
a,µ für die Kanalschätzeinheit. Dadurch wird die Iterationsschleife geschlossen.
90
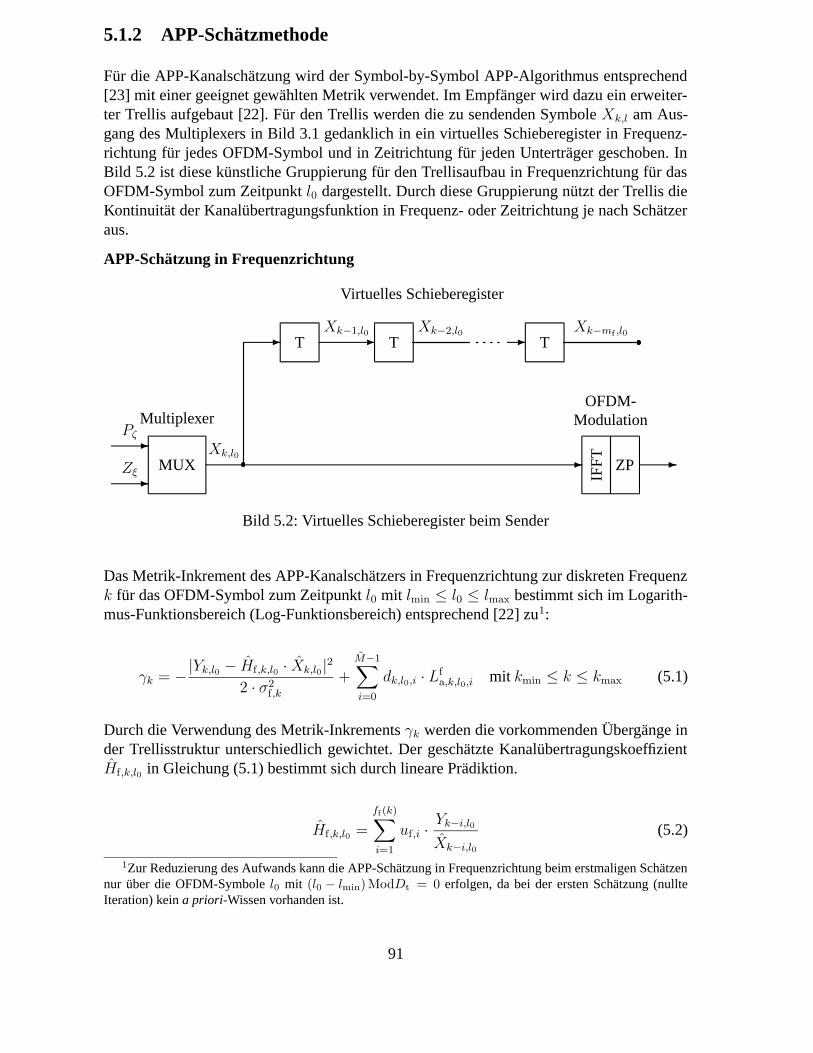
5.1.2 APP-Schätzmethode
Für die APP-Kanalschätzung wird der Symbol-by-Symbol APP-Algorithmus entsprechend[23] mit einer geeignet gewählten Metrik verwendet. Im Empfänger wird dazu ein erweiter-ter Trellis aufgebaut [22]. Für den Trellis werden die zu sendenden Symbole Xk,l am Aus-gang des Multiplexers in Bild 3.1 gedanklich in ein virtuelles Schieberegister in Frequenz-richtung für jedes OFDM-Symbol und in Zeitrichtung für jeden Unterträger geschoben. InBild 5.2 ist diese künstliche Gruppierung für den Trellisaufbau in Frequenzrichtung für dasOFDM-Symbol zum Zeitpunkt l0 dargestellt. Durch diese Gruppierung nützt der Trellis dieKontinuität der Kanalübertragungsfunktion in Frequenz- oder Zeitrichtung je nach Schätzeraus.
APP-Schätzung in Frequenzrichtung
-Zξ
-Pζ
MUX
Multiplexer
-Xk,l0
- T -Xk−1,l0
TXk−2,l0 - T
Xk−mf ,l0
Virtuelles Schieberegister
IFFT ZP
OFDM-Modulation
-
Bild 5.2: Virtuelles Schieberegister beim Sender
Das Metrik-Inkrement des APP-Kanalschätzers in Frequenzrichtung zur diskreten Frequenzk für das OFDM-Symbol zum Zeitpunkt l0 mit lmin ≤ l0 ≤ lmax bestimmt sich im Logarith-mus-Funktionsbereich (Log-Funktionsbereich) entsprechend [22] zu1:
γk = −|Yk,l0 − Hf,k,l0 · Xk,l0 |22 · σ2
f,k
+M−1∑
i=0
dk,l0,i · Lfa,k,l0,i mit kmin ≤ k ≤ kmax (5.1)
Durch die Verwendung des Metrik-Inkrements γk werden die vorkommenden Übergänge inder Trellisstruktur unterschiedlich gewichtet. Der geschätzte KanalübertragungskoeffizientHf,k,l0 in Gleichung (5.1) bestimmt sich durch lineare Prädiktion.
Hf,k,l0 =
ff(k)∑
i=1
uf,i ·Yk−i,l0
Xk−i,l0
(5.2)
1Zur Reduzierung des Aufwands kann die APP-Schätzung in Frequenzrichtung beim erstmaligen Schätzennur über die OFDM-Symbole l0 mit (l0 − lmin) ModDt = 0 erfolgen, da bei der ersten Schätzung (nullteIteration) kein a priori-Wissen vorhanden ist.
91

Die Funktion ff (k) ist wie folgt definiert:
ff (k) =
{
k − kmin für k − kmin < mf
mf sonst(5.3)
Diese Definition ist offensichtlich, da Yk,l0 nur für kmin ≤ k ≤ kmax bestimmt ist.
Die Symbole Xk−i,l0 mit i ∈ {0, 1, . . . , ff (k)} in den Gleichungen (5.1) und (5.2) sinddie angenommenen gesendeten Daten- oder Pilotsymbole entsprechend der Trellisstruktur.Die Filterkoeffizienten uf,i in Gleichung (5.2) werden für die gesendeten Symbole Xk,l0 be-rechnet. Mit dieser Voraussetzung und unter Verwendung von Gleichung (2.75) folgt ausGleichung (5.2):
Hf,k,l0 =
ff(k)∑
i=1
uf,i · Hk−i,l0 =
ff(k)∑
i=1
uf,i ·(
Hk−i,l0 +Nk−i,l0
Xk−i,l0
)
(5.4)
Die Filterkoeffizienten in Gleichung (5.4) sollen so bestimmt werden, dass der Erwartungs-
wert E{
|Hk,l0 − Hf,k,l0|2}
des quadratischen Fehlers minimiert wird. Die Filterkoeffizien-
ten, die diese Vorgabe erfüllen, berechnen sich zu [30]:
uTf = r
THH,Pf
·R−1
HH,Pf(5.5)
Der Vektor uf beinhaltet die Filterkoeffizienten uf,i wie folgt:
uTf =
(
uf,1, . . . , uf,ff (k)
)
(5.6)
Der Vektor rHH,Pf der Kreuzkorrelation zwischen Hk,l0 und Hk−i,l0 ergibt sich entsprechendGleichung (3.24) zu2:
rTHH,Pf
= (RH,f (k − k + 1) , . . . , RH,f (k − k + ff (k)))
= (RH,f (1) , . . . , RH,f (ff (k))) (5.7)
Die Frequenz-Korrelationsfunktion RH,f in Gleichung (5.7) berechnet sich entsprechendGleichung (3.25).
Die Matrix RHH,Pf in Gleichung (5.5) berechnet sich entsprechend Gleichung (3.27) zu:
RHH,Pf =
1 + N0 · β RH,f (1) · · · RH,f (ff (k)− 1)RH,f (−1) 1 + N0 · β RH,f (ff (k)− 2)
.... . .
...RH,f (−ff (k) + 1) · · · RH,f (−1) 1 + N0 · β
(5.8)
2Zur Vereinfachung und ohne Verminderung des Verständnisses ist der nötige multiplikative Faktor fU indem Argument der Frequenz-Korrelationsfunktion RH,f in Gleichung (5.7) weggelassen worden.
92
Erfüllen die Filterkoeffizienten uf,i Gleichung (5.5), so erhält man für den minimalen qua-
dratischen Fehler E{
|Hk,l0 − Hf,k,l0|2}
Folgendes [30]:
E{
|Hk,l0 − Hf,k,l0|2}
= Jmin,f,k = 1− rTHH,Pf
·R−1
HH,Pf· r∗
HH,Pf(5.9)
Entsprechend den Gleichungen (3.11) bis (3.13) bestimmt sich der Term 2 ·σ2f,k in Gleichung
(5.1) zu [22]:
2 · σ2f,k = 2 · σ2
N + Jmin,f,k · ES (5.10)
Die L-Werte Lfa,k,l0,i in Gleichung (5.1) sind die a priori-L-Werte für den APP-Schätzer, die
sich durch die Bündelung (Multiplex) der a priori-L-Werte Lca,µ der gesendeten codierten
Bits c und der a priori-L-Werte Laa,ε der Pilotbits aε ergeben. Entsprechend Gleichung (3.8)
berechnen sich die L-Werte Laa,ε zu:
Laa,ε = ln
Pr[aε = 1]
Pr[aε = 0](5.11)
Da dem Empfänger die gesendeten Pilotbits bekannt sind, sind die L-Werte Laa,ε ∈ {±∞}.
Diese Werte eignen sich nicht für eine digitale Signalverarbeitung, so dass für die L-WerteLa
a,ε betragsmäßig große Werte mit positiven oder negativen Vorzeichen verwendet werden,z. B. La
a,ε ∈ {±50}.
Die Bits dk,l0,i in der Summe in Gleichung (5.1) resultieren aus dem Demapping des SymbolsXk,l0 .
(dk,l0,0, . . . , dk,l0,M−1) = f−1
map,M
(
Xk,l0
)
(5.12)
APP-Schätzung in Zeitrichtung
Analog zur APP-Kanalschätzung in Frequenzrichtung erfolgt die APP-Kanalschätzung inZeitrichtung. Das Metrik-Inkrement des APP-Kanalschätzers in Zeitrichtung zur diskretenZeit l für den Unterträger k0 mit kmin ≤ k0 ≤ kmax berechnet sich im Log-Funktionsbereichentsprechend Gleichung (5.1) zu:
γl = −|Yk0,l − Ht,k0,l · Xk0,l|22 · σ2
t,l
+M−1∑
i=0
dk0,l,i · Lta,k0,l,i mit lmin ≤ l ≤ lmax (5.13)
Der Kanalübertragungskoeffizient Ht,k0,l folgt aus linearer Prädiktion.
Ht,k0,l =
ft(l)∑
i=1
ut,i ·Yk0,l−i
Xk0,l−i
(5.14)
93

Da für den betrachteten Block an OFDM-Symbolen die Empfangssymbole Yk0,l nur fürlmin ≤ l ≤ lmax definiert sind, folgt für die Funktion ft (l):
ft (l) =
{
l − lmin für l − lmin < mt
mt sonst(5.15)
Die angenommenen gesendeten Symbole, die sich aufgrund der Trellisstruktur ergeben, sindin den Gleichungen (5.13) und (5.14) mit Xk0,l−i bezeichnet. Die Filterkoeffizienten ut,i inGleichung (5.14) werden an die gesendeten Symbole Xk0,l angepasst. Dadurch folgt für dieBerechnung dieser Filterkoeffizenten aus Gleichung (5.14) unter Verwendung von Gleichung(2.75) Folgendes:
Ht,k0,l =
ft(l)∑
i=1
ut,i · Hk0,l−i =
ft(l)∑
i=1
ut,i ·(
Hk0,l−i +Nk0,l−i
Xk0,l−i
)
(5.16)
Die optimalen Filterkoeffizienten ut,i ergeben sich entsprechend Gleichung (5.5) zu:
uTt = r
THH,Pt
·R−1
HH,Pt(5.17)
Der Vektor ut stellt sich dabei wie folgt dar:
uTt =
(
ut,1, . . . , ut,ft(l)
)
(5.18)
Für den Vektor rHH,Pt der Kreuzkorrelation zwischen Hk0,l und Hk0,l−i folgt entsprechendGleichung (5.7)3:
rTHH,Pt
= (RH,t (1) , . . . , RH,t (ft (l))) (5.19)
Die Zeit-Korrelationsfunktion RH,t in Gleichung (5.19) berechnet sich entsprechend Glei-chung (3.37).
Die Matrix RHH,Pt in Gleichung (5.17) berechnet sich entsprechend Gleichung (5.8) zu:
RHH,Pt =
1 + N0 · β RH,t (1) · · · RH,t (ft (l)− 1)RH,t (−1) 1 + N0 · β RH,t (ft (l)− 2)
.... . .
...RH,t (−ft (l) + 1) · · · RH,t (−1) 1 + N0 · β
(5.20)
Erfüllen die Filterkoeffizienten ut,i Gleichung (5.17), so erhält man für den minimalen qua-
dratischen Fehler E{
|Hk0,l − Ht,k0,l|2}
Folgendes [30]:
3Zur Vereinfachung und ohne Verminderung des Verständnisses ist der nötige multiplikative Faktor TS indem Argument der Zeit-Korrelationsfunktion RH,t in Gleichung (5.19) weggelassen worden.
94
E{
|Hk0,l − Ht,k0,l|2}
= Jmin,t,l = 1− rTHH,Pt
·R−1
HH,Pt· r∗
HH,Pt(5.21)
Der Term 2 · σ2t,l in Gleichung (5.13) berechnet sich entsprechend Gleichung (5.10) zu:
2 · σ2t,l = 2 · σ2
N + Jmin,t,l · ES (5.22)
Die a priori-L-Werte Lta,k0,l,i in Gleichung (5.13) bestimmen sich durch Multiplexen der
a priori-L-Werte Lc,ta,µ der gesendeten codierten Bits c und der a priori-L-Werte La
a,ε derPilotbits aε.
Durch Demapping des Symbols Xk0,l erhält man die Bits dk0,l,i in der Summe in Gleichung(5.13).
(dk0,l,0, . . . , dk0,l,M−1) = f−1
map,M
(
Xk0,l
)
(5.23)
Die beiden eindimensionalen APP-Schätzer werden entsprechend Bild 5.1 zusammenge-schaltet4. Die Eingänge des APP-Schätzers in Frequenzrichtung stellen die Empfangssym-bole Yk,l, die a priori-L-Werte La
a,ε der Pilotbits aε und die a priori-L-Werte Lca,µ der gesen-
deten codierten Bits c dar, die vom Kanaldecodierer zurückgeschickt werden. Für den erstenDurchlauf durch den Kanalschätzer sind die a priori-L-Werte Lc
a,µ Null. Der APP-Schätzerin Frequenzrichtung liefert an seinem Ausgang die geschätzten L-Werte Lc,f
µ , die als a prio-ri-Wissen Lc,t
a,µ = Lc,fµ für den APP-Schätzer in Zeitrichtung dienen. Der APP-Schätzer in
Zeitrichtung verwendet die a priori-L-Werte Lc,ta,µ, die empfangenen Symbole Yk,l und die
a priori-L-Werte Laa,ε als Eingänge, um die verbesserten L-Werte Lc
µ zu berechnen. Nach-dem das a priori-Wissen Lc
a,µ abgezogen worden ist, werden die L-Werte Lce,µ dem Deinter-
leaver zugeführt. Die L-Werte Lca,µ am Ausgang des Deinterleavers werden schließlich dem
Kanaldecodierer übergeben.
Bei der pilot- oder symbolbasierten Kanalschätzung sind der Schätzung in ZeitrichtungKanalübertragungskoeffizienten von der Schätzung in Frequenzrichtung geliefert worden.Im Gegensatz dazu übergibt der APP-Schätzer in Frequenzrichtung dem APP-Schätzer inZeitrichtung L-Werte. Dadurch erfolgt die Berechnung der Prädiktorkoeffizienten in Glei-chung (5.14) für die APP-Schätzung in Zeitrichtung unabhängig von dem Ergebnis der APP-Schätzung in Frequenzrichtung.
5.2 Simulationsergebnisse
Zunächst wird entsprechend Kapitel 4 das Konvergenzverhalten der Iterationsschleife desEmpfängers mit Hilfe des EXIT-Diagramms untersucht. Dabei werden vor allem die Fälleinteressant sein, bei denen das in Kapitel 3 vorgestellte zweidimensionale Abtasttheoremverletzt ist. Hierbei wird der Vergleich mit dem ebenfalls iterativen Empfänger aus Kapitel4 im Vordergrund stehen. An die Konvergenzanalyse der Iterationsschleife schließt sich dieBeurteilung der Leistungsfähigkeit des Empfängers mit APP-Kanalschätzung anhand vonBitfehlerhäufigkeiten an.
4Es ist ebenso möglich, dass zuerst in Zeitrichtung und anschließend in Frequenzrichtung geschätzt wird.
95
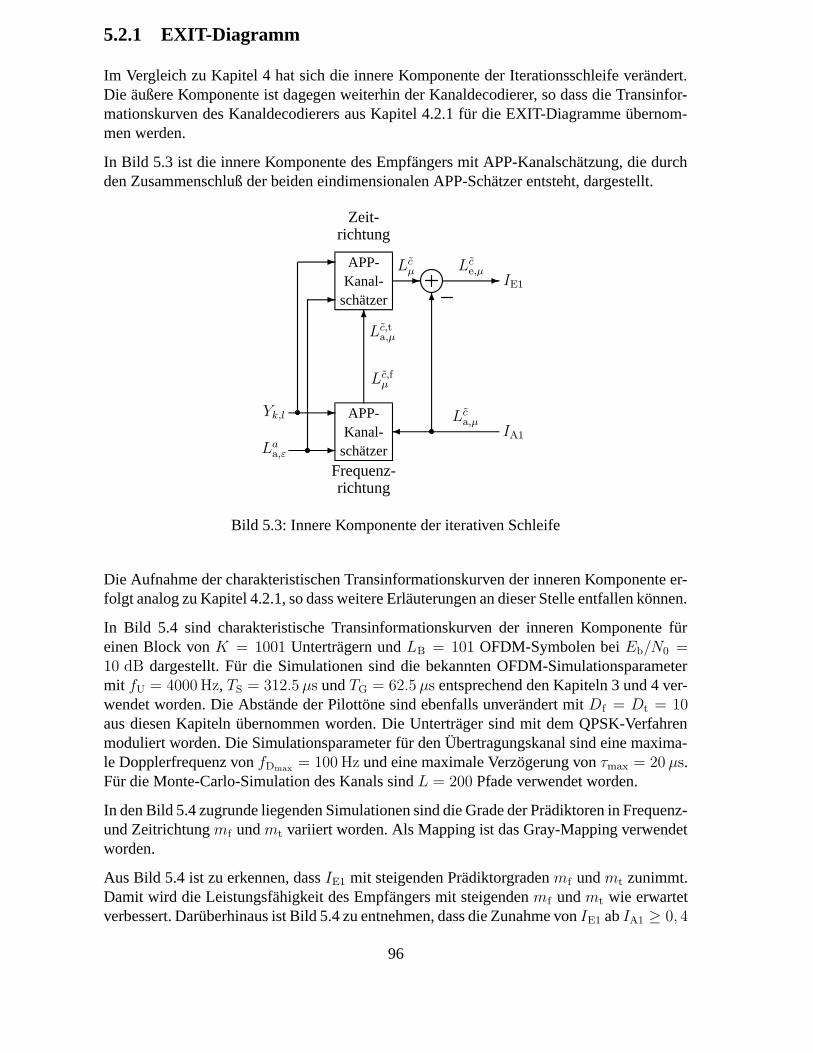
5.2.1 EXIT-Diagramm
Im Vergleich zu Kapitel 4 hat sich die innere Komponente der Iterationsschleife verändert.Die äußere Komponente ist dagegen weiterhin der Kanaldecodierer, so dass die Transinfor-mationskurven des Kanaldecodierers aus Kapitel 4.2.1 für die EXIT-Diagramme übernom-men werden.
In Bild 5.3 ist die innere Komponente des Empfängers mit APP-Kanalschätzung, die durchden Zusammenschluß der beiden eindimensionalen APP-Schätzer entsteht, dargestellt.
Yk,l-
Laa,ε
-
-
-
APP-Kanal-
schätzer
Zeit-richtung
-Lc
µ -Lc
e,µIE1
IA1�
Lca,µ
66
Lc,fµ
Lc,ta,µ
APP-Kanal-
schätzer
Frequenz-richtung
Bild 5.3: Innere Komponente der iterativen Schleife
Die Aufnahme der charakteristischen Transinformationskurven der inneren Komponente er-folgt analog zu Kapitel 4.2.1, so dass weitere Erläuterungen an dieser Stelle entfallen können.
In Bild 5.4 sind charakteristische Transinformationskurven der inneren Komponente füreinen Block von K = 1001 Unterträgern und LB = 101 OFDM-Symbolen bei Eb/N0 =10 dB dargestellt. Für die Simulationen sind die bekannten OFDM-Simulationsparametermit fU = 4000 Hz, TS = 312.5 µs und TG = 62.5 µs entsprechend den Kapiteln 3 und 4 ver-wendet worden. Die Abstände der Pilottöne sind ebenfalls unverändert mit Df = Dt = 10aus diesen Kapiteln übernommen worden. Die Unterträger sind mit dem QPSK-Verfahrenmoduliert worden. Die Simulationsparameter für den Übertragungskanal sind eine maxima-le Dopplerfrequenz von fDmax = 100 Hz und eine maximale Verzögerung von τmax = 20 µs.Für die Monte-Carlo-Simulation des Kanals sind L = 200 Pfade verwendet worden.
In den Bild 5.4 zugrunde liegenden Simulationen sind die Grade der Prädiktoren in Frequenz-und Zeitrichtung mf und mt variiert worden. Als Mapping ist das Gray-Mapping verwendetworden.
Aus Bild 5.4 ist zu erkennen, dass IE1 mit steigenden Prädiktorgraden mf und mt zunimmt.Damit wird die Leistungsfähigkeit des Empfängers mit steigenden mf und mt wie erwartetverbessert. Darüberhinaus ist Bild 5.4 zu entnehmen, dass die Zunahme von IE1 ab IA1 ≥ 0, 4
96
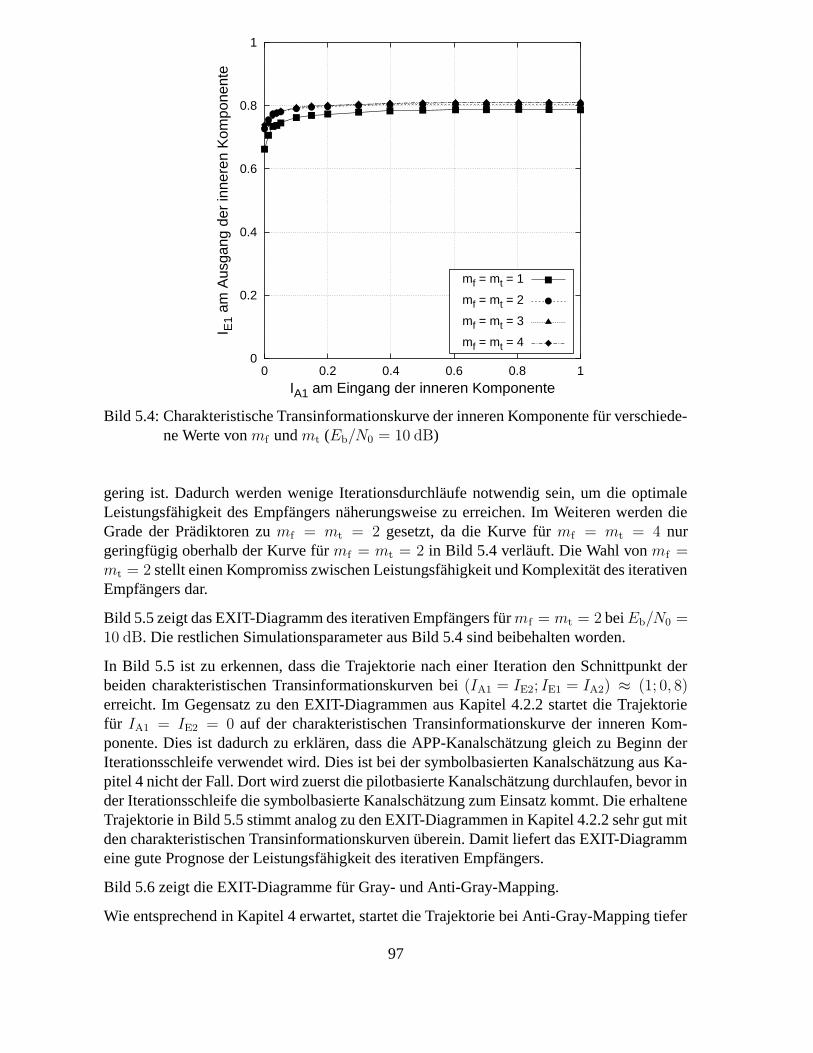
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
am A
usga
ng d
er in
nere
n K
ompo
nent
e
IA1 am Eingang der inneren Komponente
mf = mt = 1
mf = mt = 2
mf = mt = 3
mf = mt = 4
Bild 5.4: Charakteristische Transinformationskurve der inneren Komponente für verschiede-ne Werte von mf und mt (Eb/N0 = 10 dB)
gering ist. Dadurch werden wenige Iterationsdurchläufe notwendig sein, um die optimaleLeistungsfähigkeit des Empfängers näherungsweise zu erreichen. Im Weiteren werden dieGrade der Prädiktoren zu mf = mt = 2 gesetzt, da die Kurve für mf = mt = 4 nurgeringfügig oberhalb der Kurve für mf = mt = 2 in Bild 5.4 verläuft. Die Wahl von mf =mt = 2 stellt einen Kompromiss zwischen Leistungsfähigkeit und Komplexität des iterativenEmpfängers dar.
Bild 5.5 zeigt das EXIT-Diagramm des iterativen Empfängers für mf = mt = 2 bei Eb/N0 =10 dB. Die restlichen Simulationsparameter aus Bild 5.4 sind beibehalten worden.
In Bild 5.5 ist zu erkennen, dass die Trajektorie nach einer Iteration den Schnittpunkt derbeiden charakteristischen Transinformationskurven bei (IA1 = IE2; IE1 = IA2) ≈ (1; 0, 8)erreicht. Im Gegensatz zu den EXIT-Diagrammen aus Kapitel 4.2.2 startet die Trajektoriefür IA1 = IE2 = 0 auf der charakteristischen Transinformationskurve der inneren Kom-ponente. Dies ist dadurch zu erklären, dass die APP-Kanalschätzung gleich zu Beginn derIterationsschleife verwendet wird. Dies ist bei der symbolbasierten Kanalschätzung aus Ka-pitel 4 nicht der Fall. Dort wird zuerst die pilotbasierte Kanalschätzung durchlaufen, bevor inder Iterationsschleife die symbolbasierte Kanalschätzung zum Einsatz kommt. Die erhalteneTrajektorie in Bild 5.5 stimmt analog zu den EXIT-Diagrammen in Kapitel 4.2.2 sehr gut mitden charakteristischen Transinformationskurven überein. Damit liefert das EXIT-Diagrammeine gute Prognose der Leistungsfähigkeit des iterativen Empfängers.
Bild 5.6 zeigt die EXIT-Diagramme für Gray- und Anti-Gray-Mapping.
Wie entsprechend in Kapitel 4 erwartet, startet die Trajektorie bei Anti-Gray-Mapping tiefer
97
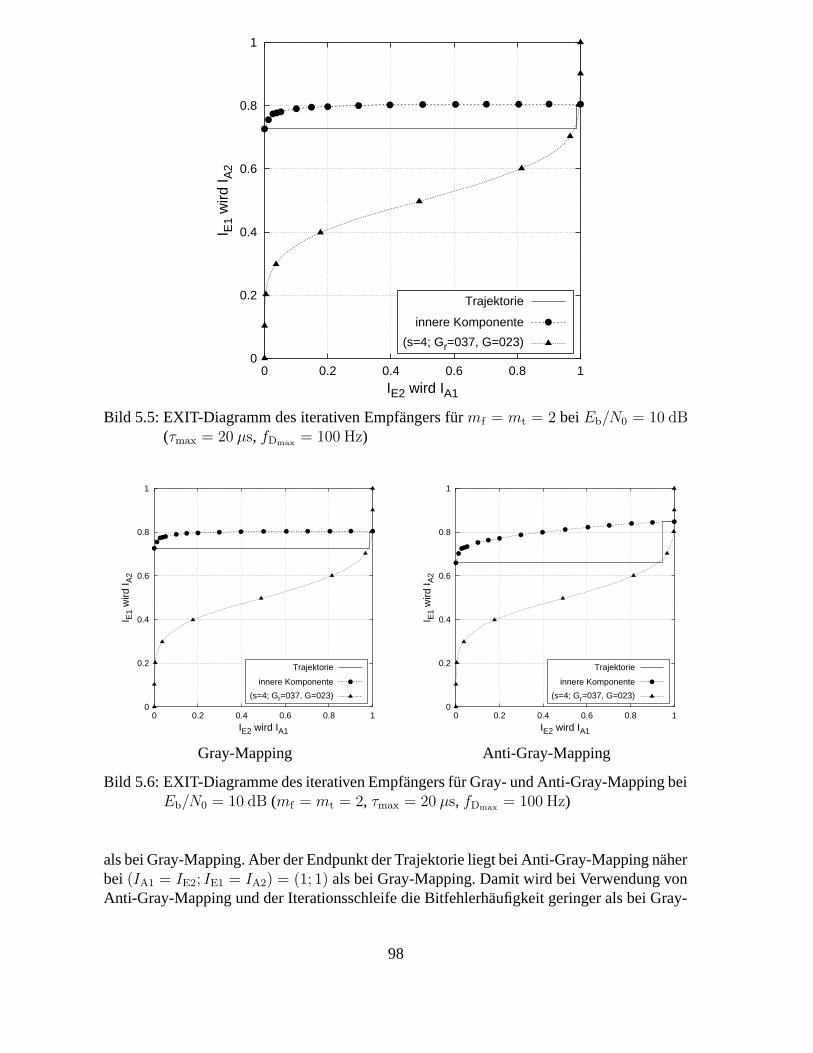
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Bild 5.5: EXIT-Diagramm des iterativen Empfängers für mf = mt = 2 bei Eb/N0 = 10 dB(τmax = 20 µs, fDmax = 100 Hz)
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Gray-Mapping
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Anti-Gray-Mapping
Bild 5.6: EXIT-Diagramme des iterativen Empfängers für Gray- und Anti-Gray-Mapping beiEb/N0 = 10 dB (mf = mt = 2, τmax = 20 µs, fDmax = 100 Hz)
als bei Gray-Mapping. Aber der Endpunkt der Trajektorie liegt bei Anti-Gray-Mapping näherbei (IA1 = IE2; IE1 = IA2) = (1; 1) als bei Gray-Mapping. Damit wird bei Verwendung vonAnti-Gray-Mapping und der Iterationsschleife die Bitfehlerhäufigkeit geringer als bei Gray-
98
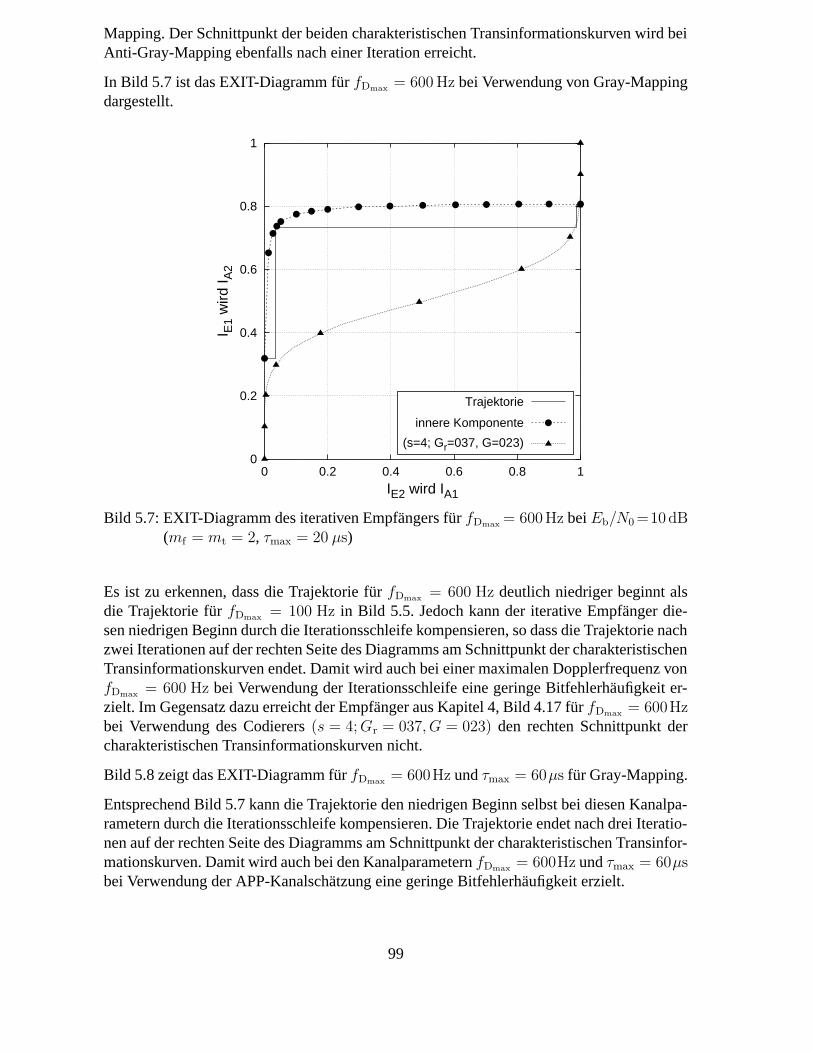
Mapping. Der Schnittpunkt der beiden charakteristischen Transinformationskurven wird beiAnti-Gray-Mapping ebenfalls nach einer Iteration erreicht.
In Bild 5.7 ist das EXIT-Diagramm für fDmax = 600 Hz bei Verwendung von Gray-Mappingdargestellt.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Bild 5.7: EXIT-Diagramm des iterativen Empfängers für fDmax = 600Hz bei Eb/N0 =10dB(mf = mt = 2, τmax = 20 µs)
Es ist zu erkennen, dass die Trajektorie für fDmax = 600 Hz deutlich niedriger beginnt alsdie Trajektorie für fDmax = 100 Hz in Bild 5.5. Jedoch kann der iterative Empfänger die-sen niedrigen Beginn durch die Iterationsschleife kompensieren, so dass die Trajektorie nachzwei Iterationen auf der rechten Seite des Diagramms am Schnittpunkt der charakteristischenTransinformationskurven endet. Damit wird auch bei einer maximalen Dopplerfrequenz vonfDmax = 600 Hz bei Verwendung der Iterationsschleife eine geringe Bitfehlerhäufigkeit er-zielt. Im Gegensatz dazu erreicht der Empfänger aus Kapitel 4, Bild 4.17 für fDmax = 600Hzbei Verwendung des Codierers (s = 4; Gr = 037, G = 023) den rechten Schnittpunkt dercharakteristischen Transinformationskurven nicht.
Bild 5.8 zeigt das EXIT-Diagramm für fDmax = 600Hz und τmax = 60µs für Gray-Mapping.
Entsprechend Bild 5.7 kann die Trajektorie den niedrigen Beginn selbst bei diesen Kanalpa-rametern durch die Iterationsschleife kompensieren. Die Trajektorie endet nach drei Iteratio-nen auf der rechten Seite des Diagramms am Schnittpunkt der charakteristischen Transinfor-mationskurven. Damit wird auch bei den Kanalparametern fDmax = 600Hz und τmax = 60µsbei Verwendung der APP-Kanalschätzung eine geringe Bitfehlerhäufigkeit erzielt.
99
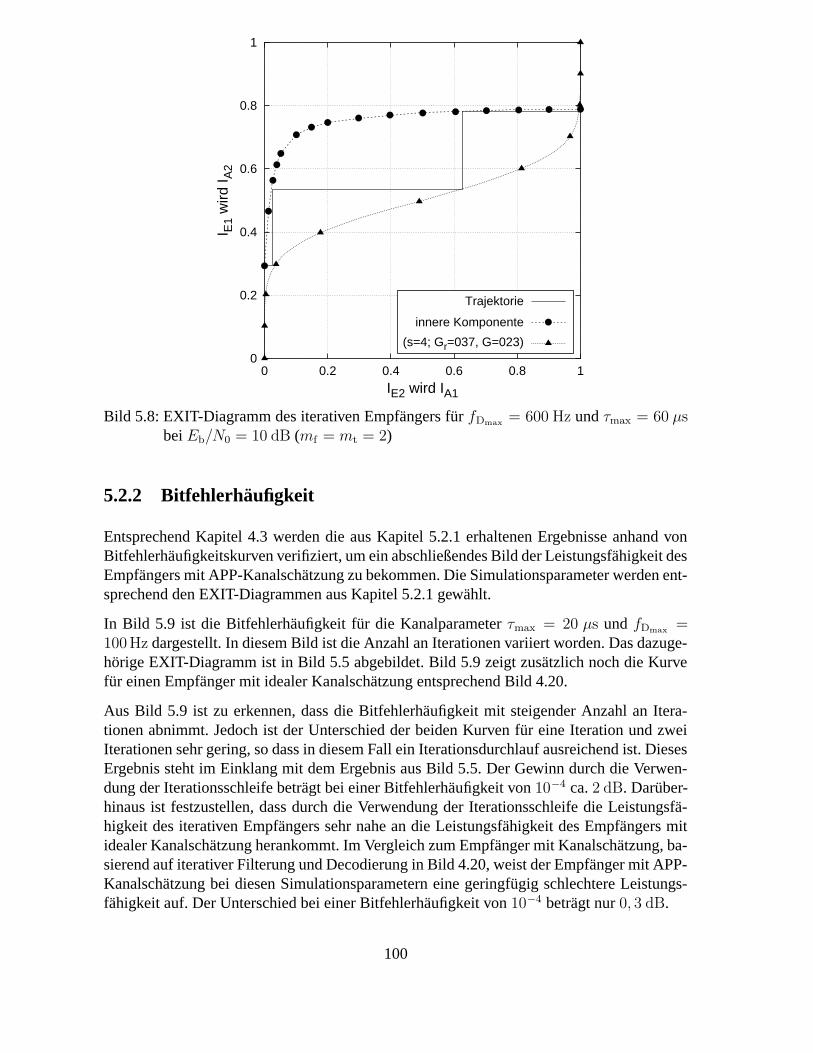
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Bild 5.8: EXIT-Diagramm des iterativen Empfängers für fDmax = 600 Hz und τmax = 60 µsbei Eb/N0 = 10 dB (mf = mt = 2)
5.2.2 Bitfehlerhäufigkeit
Entsprechend Kapitel 4.3 werden die aus Kapitel 5.2.1 erhaltenen Ergebnisse anhand vonBitfehlerhäufigkeitskurven verifiziert, um ein abschließendes Bild der Leistungsfähigkeit desEmpfängers mit APP-Kanalschätzung zu bekommen. Die Simulationsparameter werden ent-sprechend den EXIT-Diagrammen aus Kapitel 5.2.1 gewählt.
In Bild 5.9 ist die Bitfehlerhäufigkeit für die Kanalparameter τmax = 20 µs und fDmax =100Hz dargestellt. In diesem Bild ist die Anzahl an Iterationen variiert worden. Das dazuge-hörige EXIT-Diagramm ist in Bild 5.5 abgebildet. Bild 5.9 zeigt zusätzlich noch die Kurvefür einen Empfänger mit idealer Kanalschätzung entsprechend Bild 4.20.
Aus Bild 5.9 ist zu erkennen, dass die Bitfehlerhäufigkeit mit steigender Anzahl an Itera-tionen abnimmt. Jedoch ist der Unterschied der beiden Kurven für eine Iteration und zweiIterationen sehr gering, so dass in diesem Fall ein Iterationsdurchlauf ausreichend ist. DiesesErgebnis steht im Einklang mit dem Ergebnis aus Bild 5.5. Der Gewinn durch die Verwen-dung der Iterationsschleife beträgt bei einer Bitfehlerhäufigkeit von 10−4 ca. 2 dB. Darüber-hinaus ist festzustellen, dass durch die Verwendung der Iterationsschleife die Leistungsfä-higkeit des iterativen Empfängers sehr nahe an die Leistungsfähigkeit des Empfängers mitidealer Kanalschätzung herankommt. Im Vergleich zum Empfänger mit Kanalschätzung, ba-sierend auf iterativer Filterung und Decodierung in Bild 4.20, weist der Empfänger mit APP-Kanalschätzung bei diesen Simulationsparametern eine geringfügig schlechtere Leistungs-fähigkeit auf. Der Unterschied bei einer Bitfehlerhäufigkeit von 10−4 beträgt nur 0, 3 dB.
100
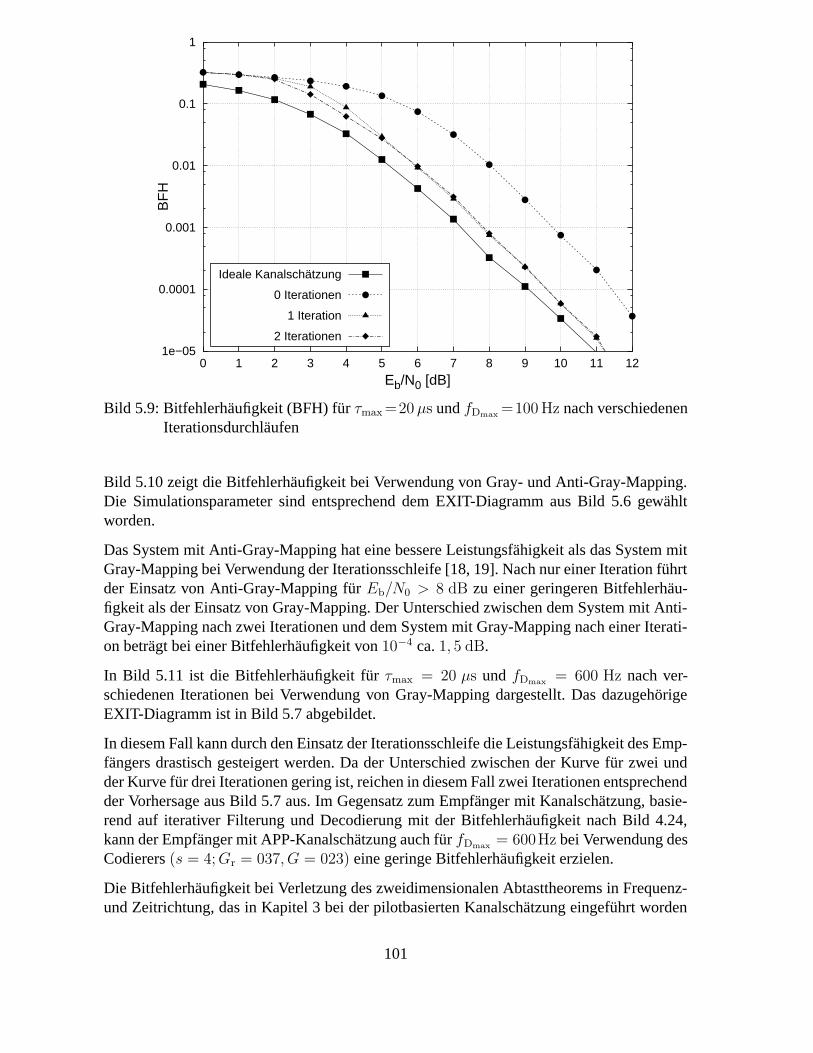
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
Ideale Kanalschätzung
0 Iterationen
1 Iteration
2 Iterationen
Bild 5.9: Bitfehlerhäufigkeit (BFH) für τmax =20 µs und fDmax =100 Hz nach verschiedenenIterationsdurchläufen
Bild 5.10 zeigt die Bitfehlerhäufigkeit bei Verwendung von Gray- und Anti-Gray-Mapping.Die Simulationsparameter sind entsprechend dem EXIT-Diagramm aus Bild 5.6 gewähltworden.
Das System mit Anti-Gray-Mapping hat eine bessere Leistungsfähigkeit als das System mitGray-Mapping bei Verwendung der Iterationsschleife [18, 19]. Nach nur einer Iteration führtder Einsatz von Anti-Gray-Mapping für Eb/N0 > 8 dB zu einer geringeren Bitfehlerhäu-figkeit als der Einsatz von Gray-Mapping. Der Unterschied zwischen dem System mit Anti-Gray-Mapping nach zwei Iterationen und dem System mit Gray-Mapping nach einer Iterati-on beträgt bei einer Bitfehlerhäufigkeit von 10−4 ca. 1, 5 dB.
In Bild 5.11 ist die Bitfehlerhäufigkeit für τmax = 20 µs und fDmax = 600 Hz nach ver-schiedenen Iterationen bei Verwendung von Gray-Mapping dargestellt. Das dazugehörigeEXIT-Diagramm ist in Bild 5.7 abgebildet.
In diesem Fall kann durch den Einsatz der Iterationsschleife die Leistungsfähigkeit des Emp-fängers drastisch gesteigert werden. Da der Unterschied zwischen der Kurve für zwei undder Kurve für drei Iterationen gering ist, reichen in diesem Fall zwei Iterationen entsprechendder Vorhersage aus Bild 5.7 aus. Im Gegensatz zum Empfänger mit Kanalschätzung, basie-rend auf iterativer Filterung und Decodierung mit der Bitfehlerhäufigkeit nach Bild 4.24,kann der Empfänger mit APP-Kanalschätzung auch für fDmax = 600Hz bei Verwendung desCodierers (s = 4; Gr = 037, G = 023) eine geringe Bitfehlerhäufigkeit erzielen.
Die Bitfehlerhäufigkeit bei Verletzung des zweidimensionalen Abtasttheorems in Frequenz-und Zeitrichtung, das in Kapitel 3 bei der pilotbasierten Kanalschätzung eingeführt worden
101
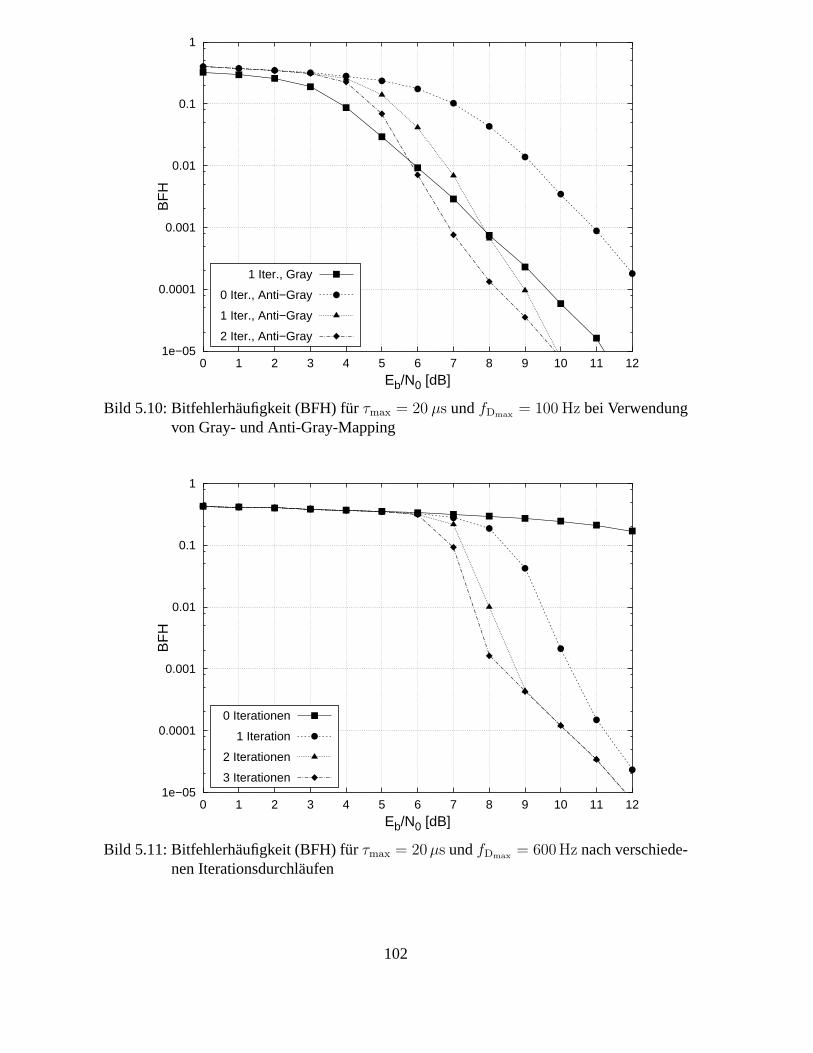
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
1 Iter., Gray
0 Iter., Anti−Gray
1 Iter., Anti−Gray
2 Iter., Anti−Gray
Bild 5.10: Bitfehlerhäufigkeit (BFH) für τmax = 20 µs und fDmax = 100 Hz bei Verwendungvon Gray- und Anti-Gray-Mapping
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
0 Iterationen
1 Iteration
2 Iterationen
3 Iterationen
Bild 5.11: Bitfehlerhäufigkeit (BFH) für τmax = 20µs und fDmax = 600Hz nach verschiede-nen Iterationsdurchläufen
102
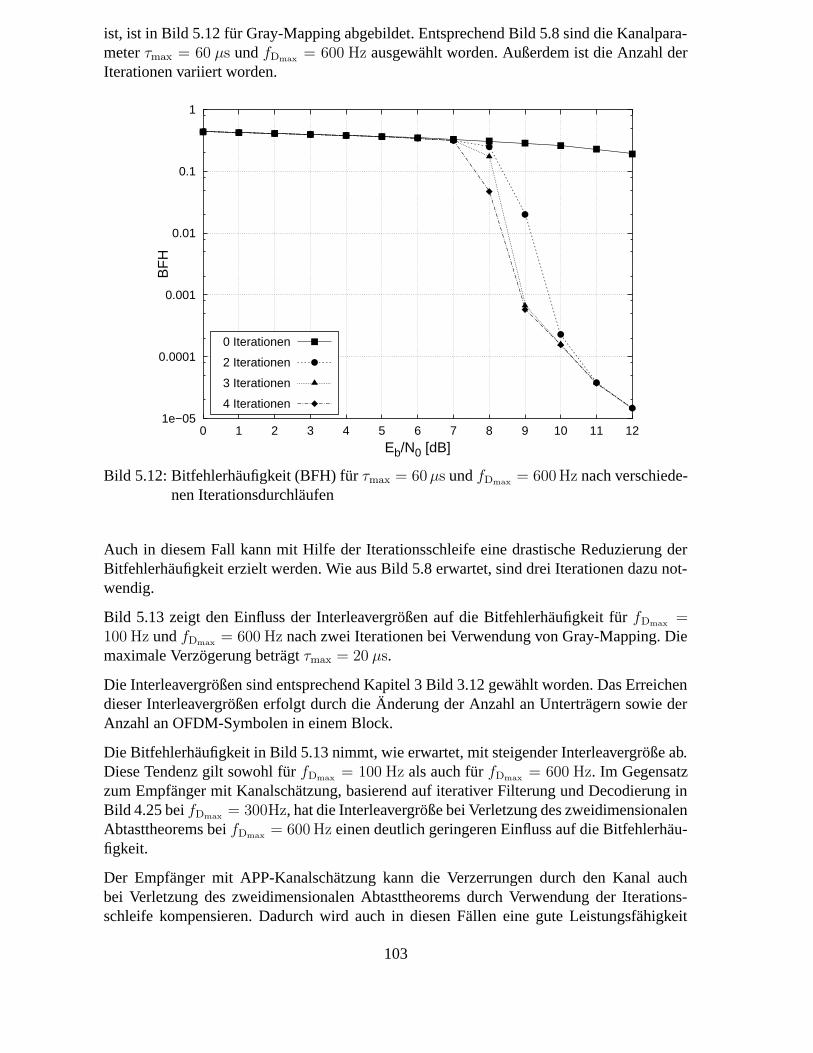
ist, ist in Bild 5.12 für Gray-Mapping abgebildet. Entsprechend Bild 5.8 sind die Kanalpara-meter τmax = 60 µs und fDmax = 600 Hz ausgewählt worden. Außerdem ist die Anzahl derIterationen variiert worden.
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
0 Iterationen
2 Iterationen
3 Iterationen
4 Iterationen
Bild 5.12: Bitfehlerhäufigkeit (BFH) für τmax = 60µs und fDmax = 600Hz nach verschiede-nen Iterationsdurchläufen
Auch in diesem Fall kann mit Hilfe der Iterationsschleife eine drastische Reduzierung derBitfehlerhäufigkeit erzielt werden. Wie aus Bild 5.8 erwartet, sind drei Iterationen dazu not-wendig.
Bild 5.13 zeigt den Einfluss der Interleavergrößen auf die Bitfehlerhäufigkeit für fDmax =100 Hz und fDmax = 600 Hz nach zwei Iterationen bei Verwendung von Gray-Mapping. Diemaximale Verzögerung beträgt τmax = 20 µs.
Die Interleavergrößen sind entsprechend Kapitel 3 Bild 3.12 gewählt worden. Das Erreichendieser Interleavergrößen erfolgt durch die Änderung der Anzahl an Unterträgern sowie derAnzahl an OFDM-Symbolen in einem Block.
Die Bitfehlerhäufigkeit in Bild 5.13 nimmt, wie erwartet, mit steigender Interleavergröße ab.Diese Tendenz gilt sowohl für fDmax = 100 Hz als auch für fDmax = 600 Hz. Im Gegensatzzum Empfänger mit Kanalschätzung, basierend auf iterativer Filterung und Decodierung inBild 4.25 bei fDmax = 300Hz, hat die Interleavergröße bei Verletzung des zweidimensionalenAbtasttheorems bei fDmax = 600 Hz einen deutlich geringeren Einfluss auf die Bitfehlerhäu-figkeit.
Der Empfänger mit APP-Kanalschätzung kann die Verzerrungen durch den Kanal auchbei Verletzung des zweidimensionalen Abtasttheorems durch Verwendung der Iterations-schleife kompensieren. Dadurch wird auch in diesen Fällen eine gute Leistungsfähigkeit
103
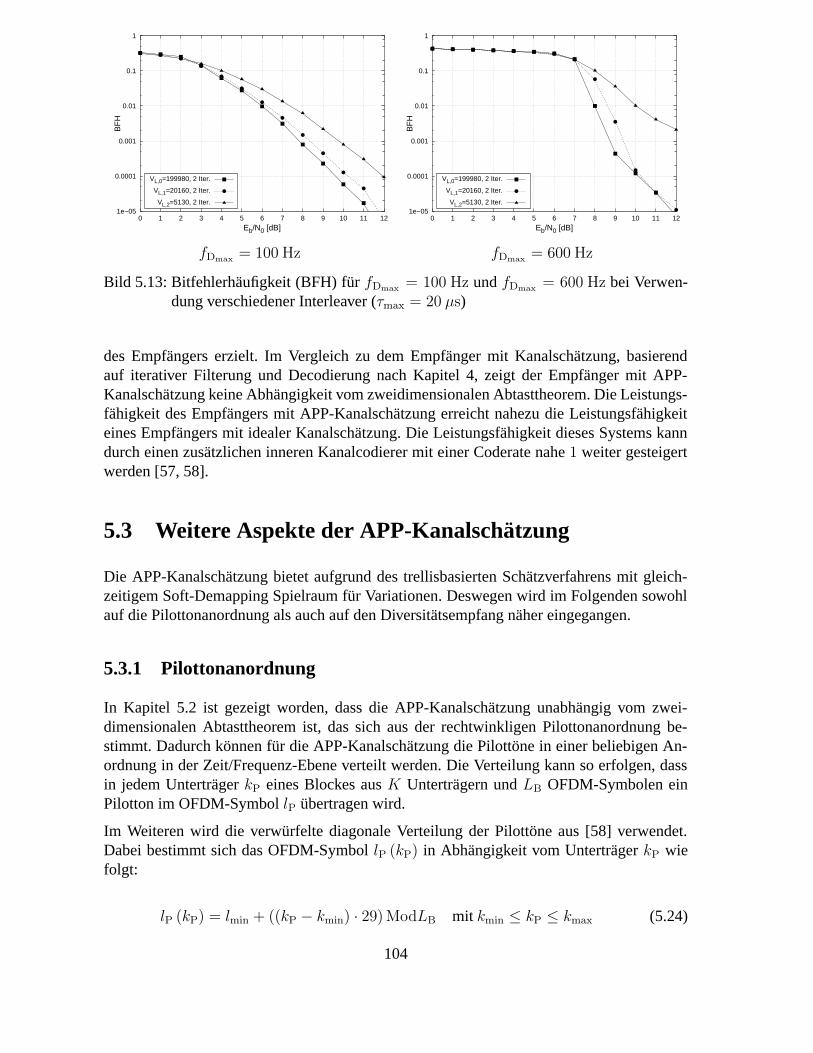
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
VL,0=199980, 2 Iter.
VL,1=20160, 2 Iter.
VL,2=5130, 2 Iter.
fDmax = 100 Hz
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
VL,0=199980, 2 Iter.
VL,1=20160, 2 Iter.
VL,2=5130, 2 Iter.
fDmax = 600 Hz
Bild 5.13: Bitfehlerhäufigkeit (BFH) für fDmax = 100 Hz und fDmax = 600 Hz bei Verwen-dung verschiedener Interleaver (τmax = 20 µs)
des Empfängers erzielt. Im Vergleich zu dem Empfänger mit Kanalschätzung, basierendauf iterativer Filterung und Decodierung nach Kapitel 4, zeigt der Empfänger mit APP-Kanalschätzung keine Abhängigkeit vom zweidimensionalen Abtasttheorem. Die Leistungs-fähigkeit des Empfängers mit APP-Kanalschätzung erreicht nahezu die Leistungsfähigkeiteines Empfängers mit idealer Kanalschätzung. Die Leistungsfähigkeit dieses Systems kanndurch einen zusätzlichen inneren Kanalcodierer mit einer Coderate nahe 1 weiter gesteigertwerden [57, 58].
5.3 Weitere Aspekte der APP-Kanalschätzung
Die APP-Kanalschätzung bietet aufgrund des trellisbasierten Schätzverfahrens mit gleich-zeitigem Soft-Demapping Spielraum für Variationen. Deswegen wird im Folgenden sowohlauf die Pilottonanordnung als auch auf den Diversitätsempfang näher eingegangen.
5.3.1 Pilottonanordnung
In Kapitel 5.2 ist gezeigt worden, dass die APP-Kanalschätzung unabhängig vom zwei-dimensionalen Abtasttheorem ist, das sich aus der rechtwinkligen Pilottonanordnung be-stimmt. Dadurch können für die APP-Kanalschätzung die Pilottöne in einer beliebigen An-ordnung in der Zeit/Frequenz-Ebene verteilt werden. Die Verteilung kann so erfolgen, dassin jedem Unterträger kP eines Blockes aus K Unterträgern und LB OFDM-Symbolen einPilotton im OFDM-Symbol lP übertragen wird.
Im Weiteren wird die verwürfelte diagonale Verteilung der Pilottöne aus [58] verwendet.Dabei bestimmt sich das OFDM-Symbol lP (kP) in Abhängigkeit vom Unterträger kP wiefolgt:
lP (kP) = lmin + ((kP − kmin) · 29) ModLB mit kmin ≤ kP ≤ kmax (5.24)
104

Damit berechnen sich die Pilotton-Positionen (kP; lP) zu:
(kP; lP (kP)) = (kP; lmin + ((kP − kmin) · 29) ModLB) mit kmin ≤ kP ≤ kmax (5.25)
Die Gesamtanzahl der Pilotsymbole in einem Block beträgt somit K. Dadurch berechnetsich die Nutzsymbolrate Rn zu:
Rn =K · LB −K
K · LB
= 1− 1
LB
(5.26)
Für die Simulationsparameter K = 1001 und LB = 101 ergibt sich die Nutzsymbolrate zu:
Rn = 0, 990099 (5.27)
Diese Nutzsymbolrate ist größer als die aus Gleichung (3.66) bei Verwendung der recht-winkligen Pilottonanordnung. Damit steigt die spektrale Effizienz beim System mit der ver-würfelten diagonalen Pilottonanordnung gegenüber dem System mit der rechtwinkligen Pi-lottonanordnung an. Die Größe des Zufallsinterleavers VL berechnet sich für das System mitder verwürfelten diagonalen Pilottonanordnung bei Verwendung des QPSK-Verfahrens zu(vgl. Gleichungen (3.69) und (3.70)):
VL = M ·Rn ·K · LB = 200200 (5.28)
In Bild 5.14 ist das EXIT-Diagramm bei Verwendung der verwürfelten diagonalen Pilotton-anordnung für τmax = 20 µs und fDmax = 600 Hz dargestellt. Bis auf die Pilottonanordnungsind alle Simulationsparameter entsprechend Bild 5.7 unverändert beibehalten worden.
Die charakteristische Transinfomationskurve der inneren Komponente in Bild 5.14 startet beiIA1 = IE2 = 0 wesentlich höher als die Kurve in Bild 5.7. Dadurch erreicht die Trajektoriein Bild 5.14 den Schnittpunkt der beiden charakteristischen Kurven bei IA1 = IE2 ≈ 1 nachnur einer Iteration. Die Trajektorie in Bild 5.7 benötigt zwei Iterationen, um den Schnittpunktzu erreichen. Damit ist bei den verwendeten Simulationsparametern die verwürfelte diago-nale Pilottonanordnung der rechtwinkligen Anordnung vorzuziehen, da neben der höherenspektralen Effizienz auch weniger Iterationsdurchläufe notwendig sind.
In Bild 5.15 ist die Bitfehlerhäufigkeit für τmax = 20µs und fDmax = 600Hz nach verschiede-nen Iterationen für die verwürfelte diagonale Pilottonanordnung dargestellt. In diesem Bildist die Kurve für die rechtwinklige Pilottonanordnung (rechtw. PR) nach zwei Iterationen ausBild 5.11 ebenfalls abgebildet.
Die Kurven für eine Iteration und zwei Iterationen bei der verwürfelten diagonalen Pilotton-anordnung führen im Bereich Eb/N0 < 9dB zu einer geringeren Bitfehlerhäufigkeit als dieKurve für zwei Iterationen bei Verwendung des rechtwinkligen Pilotrasters. Dies ist in demhöheren Beginn der Trajekorie in Bild 5.14 im Vergleich zur Trajektorie aus Bild 5.7 be-gründet. Ab Eb/N0 ≥ 9dB haben diese drei Bitfehlerkurven nahzu den identischen Verlauf.Dadurch lässt sich bei Verwendung des verwürfelten diagonalen Pilotrasters eine Iterationgegenüber dem System mit der rechtwinkligen Pilottonanordnung bei gleicher Leistungsfä-higkeit einsparen. Durch die Verringerung der Iterationsdurchläufe wird die Komplexität desEmpfängers reduziert.
105
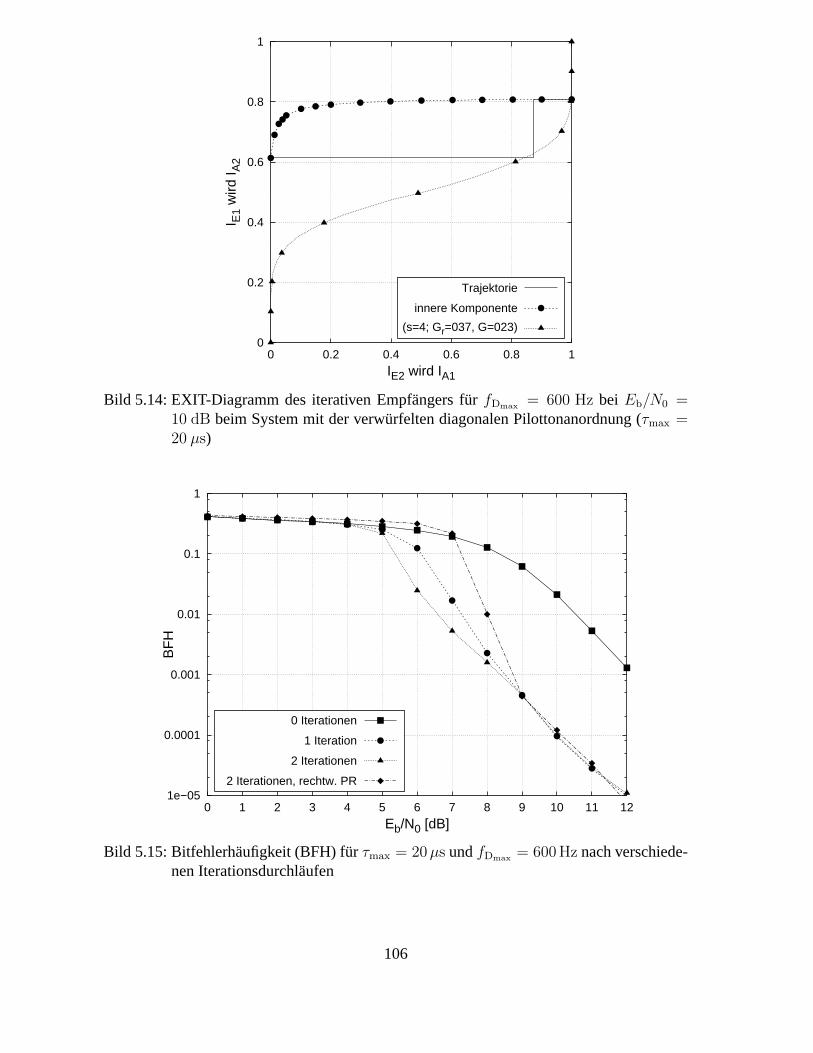
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
Bild 5.14: EXIT-Diagramm des iterativen Empfängers für fDmax = 600 Hz bei Eb/N0 =10 dB beim System mit der verwürfelten diagonalen Pilottonanordnung (τmax =20 µs)
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
0 Iterationen
1 Iteration
2 Iterationen
2 Iterationen, rechtw. PR
Bild 5.15: Bitfehlerhäufigkeit (BFH) für τmax = 20µs und fDmax = 600Hz nach verschiede-nen Iterationsdurchläufen
106
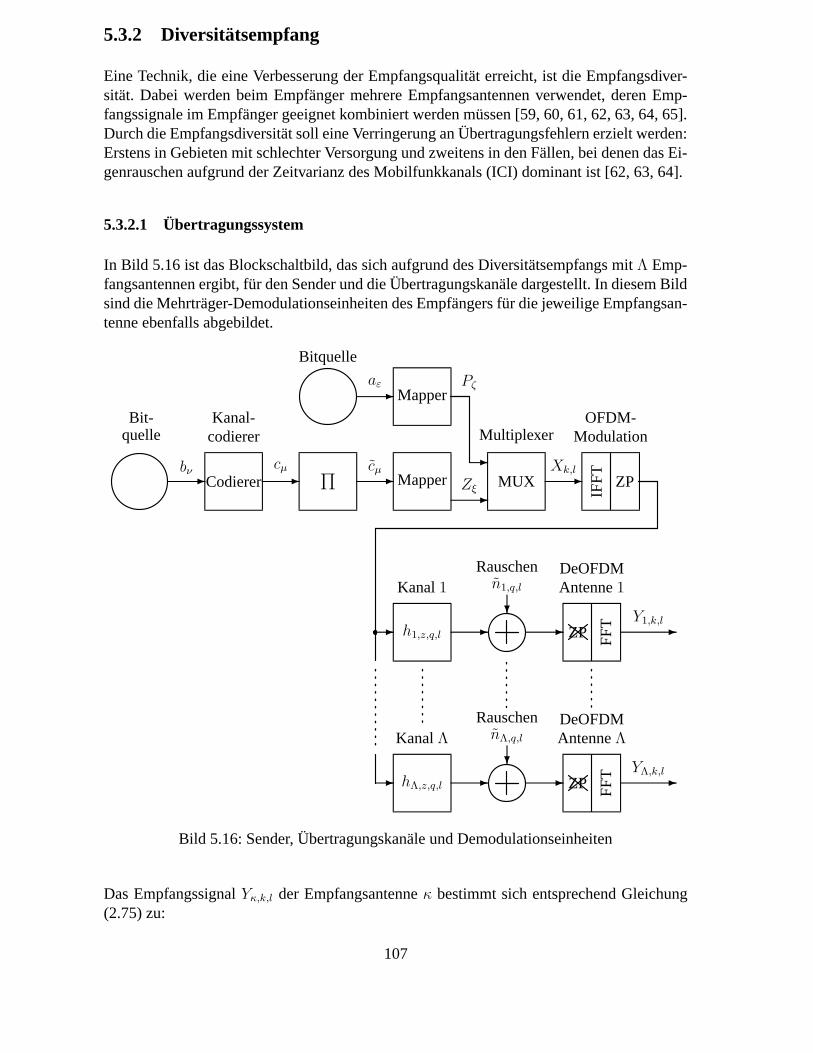
5.3.2 Diversitätsempfang
Eine Technik, die eine Verbesserung der Empfangsqualität erreicht, ist die Empfangsdiver-sität. Dabei werden beim Empfänger mehrere Empfangsantennen verwendet, deren Emp-fangssignale im Empfänger geeignet kombiniert werden müssen [59, 60, 61, 62, 63, 64, 65].Durch die Empfangsdiversität soll eine Verringerung an Übertragungsfehlern erzielt werden:Erstens in Gebieten mit schlechter Versorgung und zweitens in den Fällen, bei denen das Ei-genrauschen aufgrund der Zeitvarianz des Mobilfunkkanals (ICI) dominant ist [62, 63, 64].
5.3.2.1 Übertragungssystem
In Bild 5.16 ist das Blockschaltbild, das sich aufgrund des Diversitätsempfangs mit Λ Emp-fangsantennen ergibt, für den Sender und die Übertragungskanäle dargestellt. In diesem Bildsind die Mehrträger-Demodulationseinheiten des Empfängers für die jeweilige Empfangsan-tenne ebenfalls abgebildet.
Bit-quelle
-bν
Codierer
Kanal-codierer
-cµ
Π-
cµMapper
-Zξ MUX
Multiplexer
-Xk,l
IFFT ZP
OFDM-Modulation
Bitquelle
-aε
MapperPζ
-
- h1,z,q,l
Kanal 1
-?
n1,q,l
Rauschen
- ZP FFT
DeOFDMAntenne 1
-Y1,k,l
- hΛ,z,q,l
Kanal Λ
-?
nΛ,q,l
Rauschen
- ZP FFT
DeOFDMAntenne Λ
-YΛ,k,l
Bild 5.16: Sender, Übertragungskanäle und Demodulationseinheiten
Das Empfangssignal Yκ,k,l der Empfangsantenne κ bestimmt sich entsprechend Gleichung(2.75) zu:
107
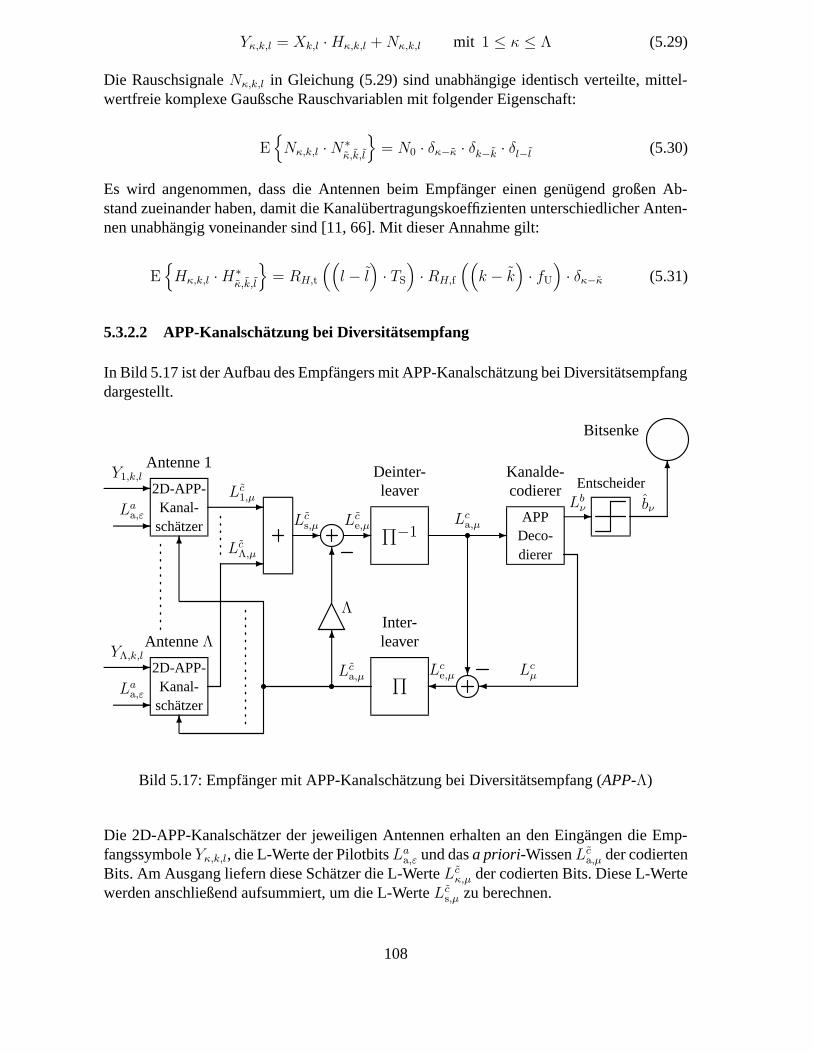
Yκ,k,l = Xk,l ·Hκ,k,l + Nκ,k,l mit 1 ≤ κ ≤ Λ (5.29)
Die Rauschsignale Nκ,k,l in Gleichung (5.29) sind unabhängige identisch verteilte, mittel-wertfreie komplexe Gaußsche Rauschvariablen mit folgender Eigenschaft:
E{
Nκ,k,l ·N∗κ,k,l
}
= N0 · δκ−κ · δk−k · δl−l (5.30)
Es wird angenommen, dass die Antennen beim Empfänger einen genügend großen Ab-stand zueinander haben, damit die Kanalübertragungskoeffizienten unterschiedlicher Anten-nen unabhängig voneinander sind [11, 66]. Mit dieser Annahme gilt:
E{
Hκ,k,l ·H∗κ,k,l
}
= RH,t
((
l − l)
· TS
)
·RH,f
((
k − k)
· fU
)
· δκ−κ (5.31)
5.3.2.2 APP-Kanalschätzung bei Diversitätsempfang
In Bild 5.17 ist der Aufbau des Empfängers mit APP-Kanalschätzung bei Diversitätsempfangdargestellt.
-Y1,k,l
-La
a,ε
2D-APP-Kanal-
schätzer
Antenne 1
-YΛ,k,l
-La
a,ε
2D-APP-Kanal-
schätzer
Antenne Λ
-Lc
1,µ
-Lc
Λ,µ
6
6-
Lcs,µ -
Lce,µ
Π−1
Deinter-leaver
-Lc
a,µAPP
Deco-dierer
Kanalde-codierer
-Lb
ν
Entscheider6
bν
Bitsenke
�Lc
µ?�Lc
e,µ
Π
Inter-leaver
Lca,µ
6
Λ
6
Bild 5.17: Empfänger mit APP-Kanalschätzung bei Diversitätsempfang (APP-Λ)
Die 2D-APP-Kanalschätzer der jeweiligen Antennen erhalten an den Eingängen die Emp-fangssymbole Yκ,k,l, die L-Werte der Pilotbits La
a,ε und das a priori-Wissen Lca,µ der codierten
Bits. Am Ausgang liefern diese Schätzer die L-Werte Lcκ,µ der codierten Bits. Diese L-Werte
werden anschließend aufsummiert, um die L-Werte Lcs,µ zu berechnen.
108
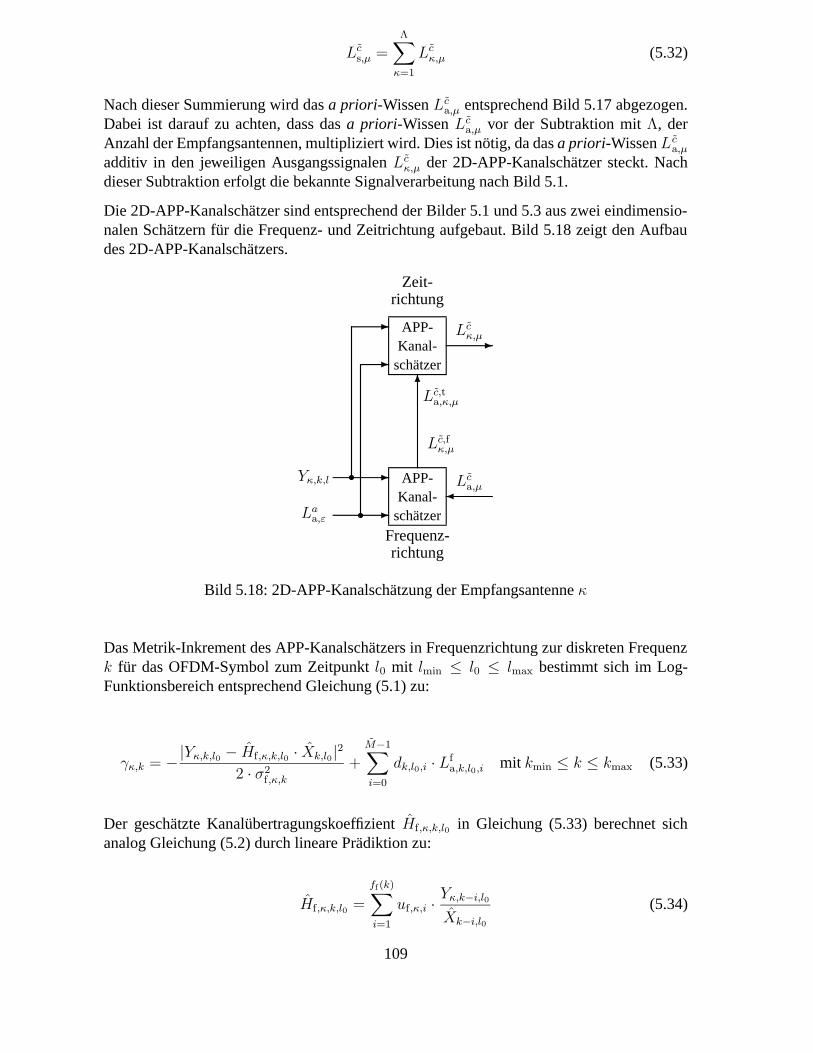
Lcs,µ =
Λ∑
κ=1
Lcκ,µ (5.32)
Nach dieser Summierung wird das a priori-Wissen Lca,µ entsprechend Bild 5.17 abgezogen.
Dabei ist darauf zu achten, dass das a priori-Wissen Lca,µ vor der Subtraktion mit Λ, der
Anzahl der Empfangsantennen, multipliziert wird. Dies ist nötig, da das a priori-Wissen L ca,µ
additiv in den jeweiligen Ausgangssignalen Lcκ,µ der 2D-APP-Kanalschätzer steckt. Nach
dieser Subtraktion erfolgt die bekannte Signalverarbeitung nach Bild 5.1.
Die 2D-APP-Kanalschätzer sind entsprechend der Bilder 5.1 und 5.3 aus zwei eindimensio-nalen Schätzern für die Frequenz- und Zeitrichtung aufgebaut. Bild 5.18 zeigt den Aufbaudes 2D-APP-Kanalschätzers.
Yκ,k,l-
Laa,ε
-
-
-
APP-Kanal-
schätzer
Zeit-richtung
-Lc
κ,µ
�Lc
a,µ
6
Lc,fκ,µ
Lc,ta,κ,µ
APP-Kanal-
schätzer
Frequenz-richtung
Bild 5.18: 2D-APP-Kanalschätzung der Empfangsantenne κ
Das Metrik-Inkrement des APP-Kanalschätzers in Frequenzrichtung zur diskreten Frequenzk für das OFDM-Symbol zum Zeitpunkt l0 mit lmin ≤ l0 ≤ lmax bestimmt sich im Log-Funktionsbereich entsprechend Gleichung (5.1) zu:
γκ,k = −|Yκ,k,l0 − Hf,κ,k,l0 · Xk,l0|22 · σ2
f,κ,k
+M−1∑
i=0
dk,l0,i · Lfa,k,l0,i mit kmin ≤ k ≤ kmax (5.33)
Der geschätzte Kanalübertragungskoeffizient Hf,κ,k,l0 in Gleichung (5.33) berechnet sichanalog Gleichung (5.2) durch lineare Prädiktion zu:
Hf,κ,k,l0 =
ff (k)∑
i=1
uf,κ,i ·Yκ,k−i,l0
Xk−i,l0
(5.34)
109
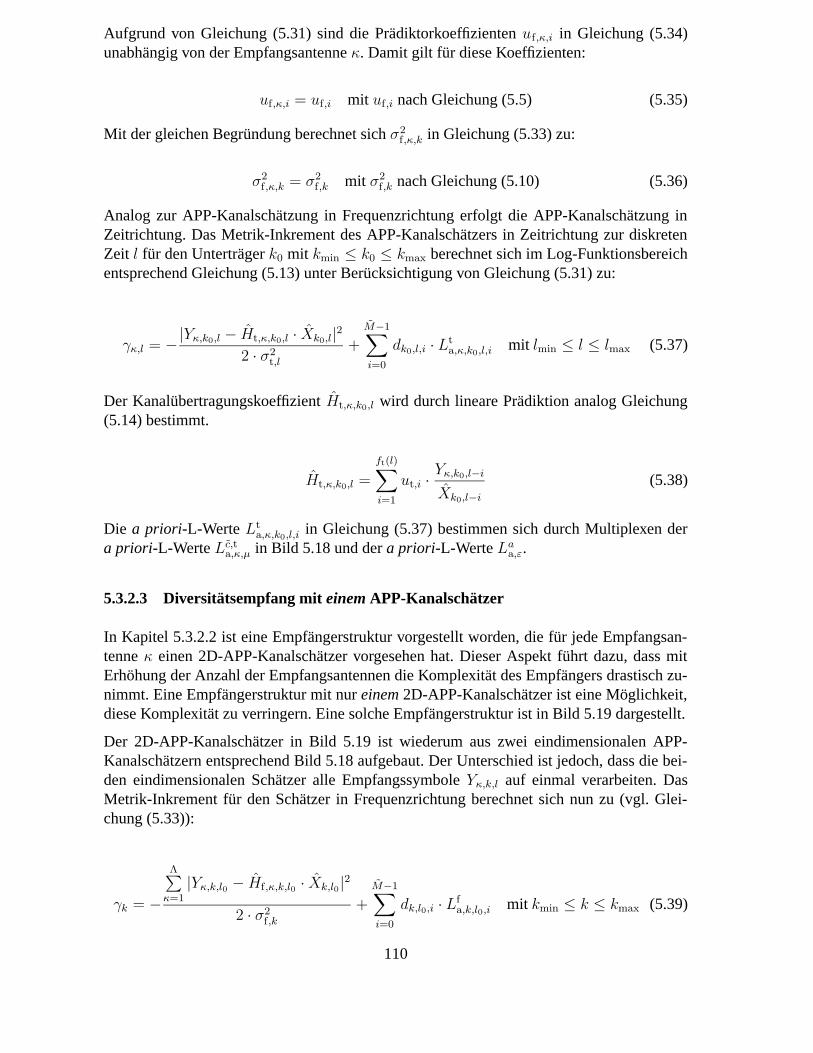
Aufgrund von Gleichung (5.31) sind die Prädiktorkoeffizienten uf,κ,i in Gleichung (5.34)unabhängig von der Empfangsantenne κ. Damit gilt für diese Koeffizienten:
uf,κ,i = uf,i mit uf,i nach Gleichung (5.5) (5.35)
Mit der gleichen Begründung berechnet sich σ2f,κ,k in Gleichung (5.33) zu:
σ2f,κ,k = σ2
f,k mit σ2f,k nach Gleichung (5.10) (5.36)
Analog zur APP-Kanalschätzung in Frequenzrichtung erfolgt die APP-Kanalschätzung inZeitrichtung. Das Metrik-Inkrement des APP-Kanalschätzers in Zeitrichtung zur diskretenZeit l für den Unterträger k0 mit kmin ≤ k0 ≤ kmax berechnet sich im Log-Funktionsbereichentsprechend Gleichung (5.13) unter Berücksichtigung von Gleichung (5.31) zu:
γκ,l = −|Yκ,k0,l − Ht,κ,k0,l · Xk0,l|22 · σ2
t,l
+M−1∑
i=0
dk0,l,i · Lta,κ,k0,l,i mit lmin ≤ l ≤ lmax (5.37)
Der Kanalübertragungskoeffizient Ht,κ,k0,l wird durch lineare Prädiktion analog Gleichung(5.14) bestimmt.
Ht,κ,k0,l =
ft(l)∑
i=1
ut,i ·Yκ,k0,l−i
Xk0,l−i
(5.38)
Die a priori-L-Werte Lta,κ,k0,l,i in Gleichung (5.37) bestimmen sich durch Multiplexen der
a priori-L-Werte Lc,ta,κ,µ in Bild 5.18 und der a priori-L-Werte La
a,ε.
5.3.2.3 Diversitätsempfang mit einem APP-Kanalschätzer
In Kapitel 5.3.2.2 ist eine Empfängerstruktur vorgestellt worden, die für jede Empfangsan-tenne κ einen 2D-APP-Kanalschätzer vorgesehen hat. Dieser Aspekt führt dazu, dass mitErhöhung der Anzahl der Empfangsantennen die Komplexität des Empfängers drastisch zu-nimmt. Eine Empfängerstruktur mit nur einem 2D-APP-Kanalschätzer ist eine Möglichkeit,diese Komplexität zu verringern. Eine solche Empfängerstruktur ist in Bild 5.19 dargestellt.
Der 2D-APP-Kanalschätzer in Bild 5.19 ist wiederum aus zwei eindimensionalen APP-Kanalschätzern entsprechend Bild 5.18 aufgebaut. Der Unterschied ist jedoch, dass die bei-den eindimensionalen Schätzer alle Empfangssymbole Yκ,k,l auf einmal verarbeiten. DasMetrik-Inkrement für den Schätzer in Frequenzrichtung berechnet sich nun zu (vgl. Glei-chung (5.33)):
γk = −
Λ∑
κ=1
|Yκ,k,l0 − Hf,κ,k,l0 · Xk,l0|2
2 · σ2f,k
+M−1∑
i=0
dk,l0,i · Lfa,k,l0,i mit kmin ≤ k ≤ kmax (5.39)
110
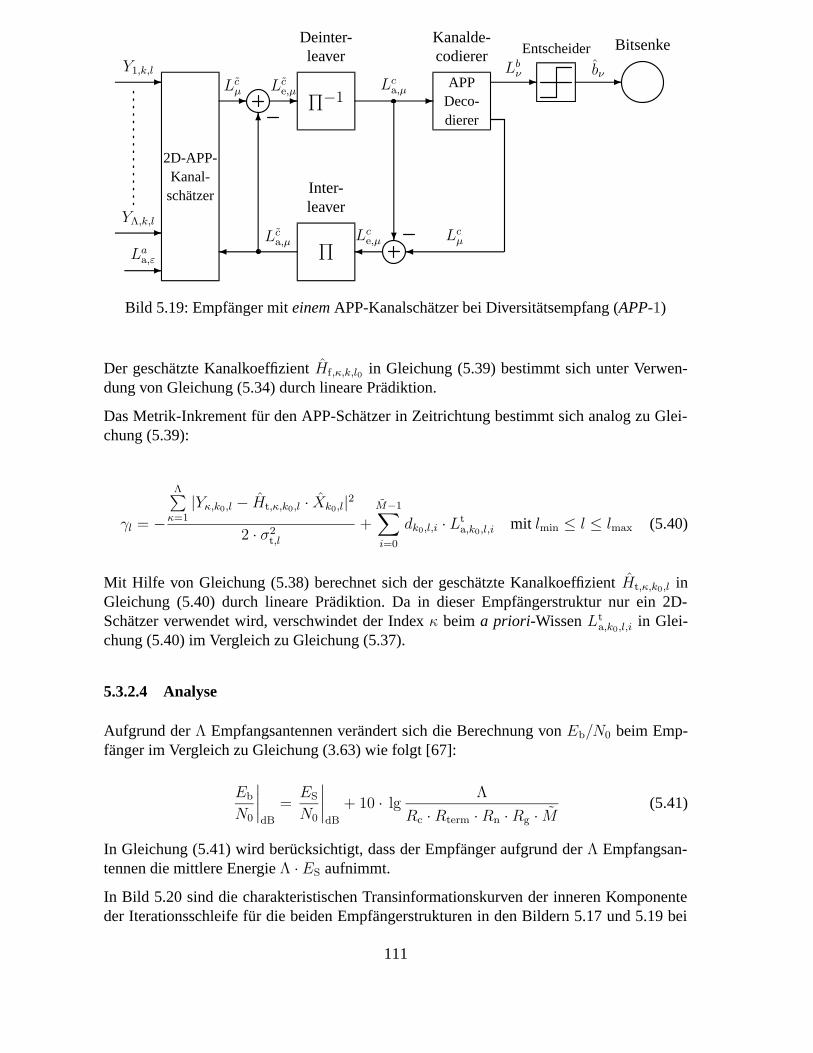
-Y1,k,l
-YΛ,k,l
-La
a,ε
2D-APP-Kanal-
schätzer
-Lc
µ -Lc
e,µ
Π−1
Deinter-leaver
-Lc
a,µAPP
Deco-dierer
Kanalde-codierer
-Lb
ν
Entscheider
-bν
Bitsenke
�Lc
µ?�Lc
e,µ
Π
Inter-leaver
�Lc
a,µ
6
Bild 5.19: Empfänger mit einem APP-Kanalschätzer bei Diversitätsempfang (APP-1)
Der geschätzte Kanalkoeffizient Hf,κ,k,l0 in Gleichung (5.39) bestimmt sich unter Verwen-dung von Gleichung (5.34) durch lineare Prädiktion.
Das Metrik-Inkrement für den APP-Schätzer in Zeitrichtung bestimmt sich analog zu Glei-chung (5.39):
γl = −
Λ∑
κ=1
|Yκ,k0,l − Ht,κ,k0,l · Xk0,l|2
2 · σ2t,l
+M−1∑
i=0
dk0,l,i · Lta,k0,l,i mit lmin ≤ l ≤ lmax (5.40)
Mit Hilfe von Gleichung (5.38) berechnet sich der geschätzte Kanalkoeffizient Ht,κ,k0,l inGleichung (5.40) durch lineare Prädiktion. Da in dieser Empfängerstruktur nur ein 2D-Schätzer verwendet wird, verschwindet der Index κ beim a priori-Wissen Lt
a,k0,l,i in Glei-chung (5.40) im Vergleich zu Gleichung (5.37).
5.3.2.4 Analyse
Aufgrund der Λ Empfangsantennen verändert sich die Berechnung von Eb/N0 beim Emp-fänger im Vergleich zu Gleichung (3.63) wie folgt [67]:
Eb
N0
∣
∣
∣
∣
dB
=ES
N0
∣
∣
∣
∣
dB
+ 10 · lgΛ
Rc ·Rterm ·Rn ·Rg · M(5.41)
In Gleichung (5.41) wird berücksichtigt, dass der Empfänger aufgrund der Λ Empfangsan-tennen die mittlere Energie Λ · ES aufnimmt.
In Bild 5.20 sind die charakteristischen Transinformationskurven der inneren Komponenteder Iterationsschleife für die beiden Empfängerstrukturen in den Bildern 5.17 und 5.19 bei
111
Eb/N0 = 10dB dargestellt. Dabei ist die Anzahl der Empfangsantennen zu Λ = 2 und Λ = 3gesetzt worden5. Die Kanalparameter sind zu τmax = 20 µs und fDmax = 100 Hz gewähltworden. Als Pilottonanordnung ist das verwürfelte diagonale Pilotraster entsprechend Kapi-tel 5.3.1 verwendet worden. Die Unterträger sind mit dem QPSK-Verfahren bei Verwendungvon Gray-Mapping moduliert worden. Alle übrigen Simulationsparameter sind unverändertbeibehalten worden. Die Empfängerstruktur aus Bild 5.17 trägt die Bezeichnung APP-Λ. Fürdie Struktur aus Bild 5.19 ist die Bezeichnung APP-1 ausgewählt worden.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
am A
usga
ng d
er in
nere
n K
ompo
nent
e
IA1 am Eingang der inneren Komponente
APP−Λ
APP−1
Λ = 2
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
am A
usga
ng d
er in
nere
n K
ompo
nent
eIA1 am Eingang der inneren Komponente
APP−Λ
APP−1
Λ = 3
Bild 5.20: Charakteristische Transinformationskurven der inneren Komponente für verschie-dene Empfängerstrukturen bei Eb/N0 = 10 dB
In Bild 5.20 ist zu erkennen, dass sowohl für Λ = 2 als auch für Λ = 3 die Kurve derEmpfängerstruktur APP-1 für IA1 = 0 höher beginnt als die Kurve der EmpfängerstrukturAPP-Λ. Damit liefert der Empfänger APP-1 eine geringere Bitfehlerhäufigkeit als der Emp-fänger APP-Λ, wenn die Iterationsschleife nicht durchlaufen wird. Ab IA1 ≥ 0, 3 haben dieKurven in Bild 5.20 den gleichen Verlauf, so dass bei Verwendung der Iterationsschleifedie beiden Empfänger die gleiche Leistungsfähigkeit erzielen. Der Vergleich der Kurven fürΛ = 2 und Λ = 3 zeigt, dass die Kurven für Λ = 3 höher verlaufen als die Kurven fürΛ = 2. Dadurch wird mit steigender Anzahl an Empfangsantennen die Bitfehlerhäufigkeitbeim Empfänger, wie erwartet, reduziert. Somit stellt der Diversitätsempfang eine geeigneteMaßnahme dar, um die Empfangsqualität zu verbessern.
Die EXIT-Diagramme der beiden Empfängerstrukturen APP-Λ und APP-1 sind in Bild 5.21bei Eb/N0 = 10 dB gegenübergestellt. Die Anzahl der Empfangsantennen beträgt Λ = 2.Die Simulationsparameter sind entsprechend Bild 5.20 beibehalten worden.
Bild 5.21 ist zu entnehmen, dass für beide Empfänger der Schnittpunkt der charakteristi-schen Transinformationskurven nach einer Iteration erreicht wird. Dadurch erhält man mitbeiden Empfängern nach einer Iteration die nahezu gleiche Bitfehlerhäufigkeit. Jedoch ver-läuft die Trajektorie des Empfängers APP-1 für null Iterationen höher als die Trajektorie
5Es ist offensichtlich, dass für Λ = 1 die beiden Empfängerstrukturen identisch mit der Empfängerstrukturin Bild 5.1 sind.
112
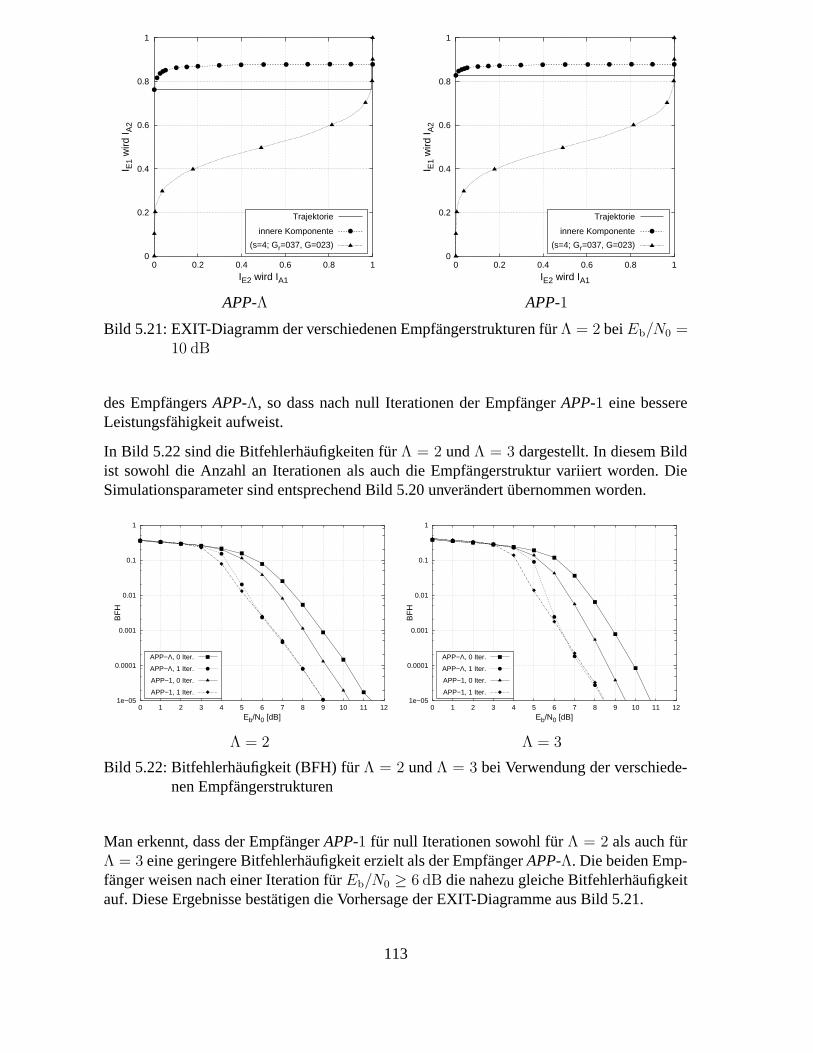
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
APP-Λ
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
I E1
wird
I A2
IE2 wird IA1
Trajektorie
innere Komponente
(s=4; Gr=037, G=023)
APP-1
Bild 5.21: EXIT-Diagramm der verschiedenen Empfängerstrukturen für Λ = 2 bei Eb/N0 =10 dB
des Empfängers APP-Λ, so dass nach null Iterationen der Empfänger APP-1 eine bessereLeistungsfähigkeit aufweist.
In Bild 5.22 sind die Bitfehlerhäufigkeiten für Λ = 2 und Λ = 3 dargestellt. In diesem Bildist sowohl die Anzahl an Iterationen als auch die Empfängerstruktur variiert worden. DieSimulationsparameter sind entsprechend Bild 5.20 unverändert übernommen worden.
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
APP−Λ, 0 Iter.
APP−Λ, 1 Iter.
APP−1, 0 Iter.
APP−1, 1 Iter.
Λ = 2
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
APP−Λ, 0 Iter.
APP−Λ, 1 Iter.
APP−1, 0 Iter.
APP−1, 1 Iter.
Λ = 3
Bild 5.22: Bitfehlerhäufigkeit (BFH) für Λ = 2 und Λ = 3 bei Verwendung der verschiede-nen Empfängerstrukturen
Man erkennt, dass der Empfänger APP-1 für null Iterationen sowohl für Λ = 2 als auch fürΛ = 3 eine geringere Bitfehlerhäufigkeit erzielt als der Empfänger APP-Λ. Die beiden Emp-fänger weisen nach einer Iteration für Eb/N0 ≥ 6 dB die nahezu gleiche Bitfehlerhäufigkeitauf. Diese Ergebnisse bestätigen die Vorhersage der EXIT-Diagramme aus Bild 5.21.
113
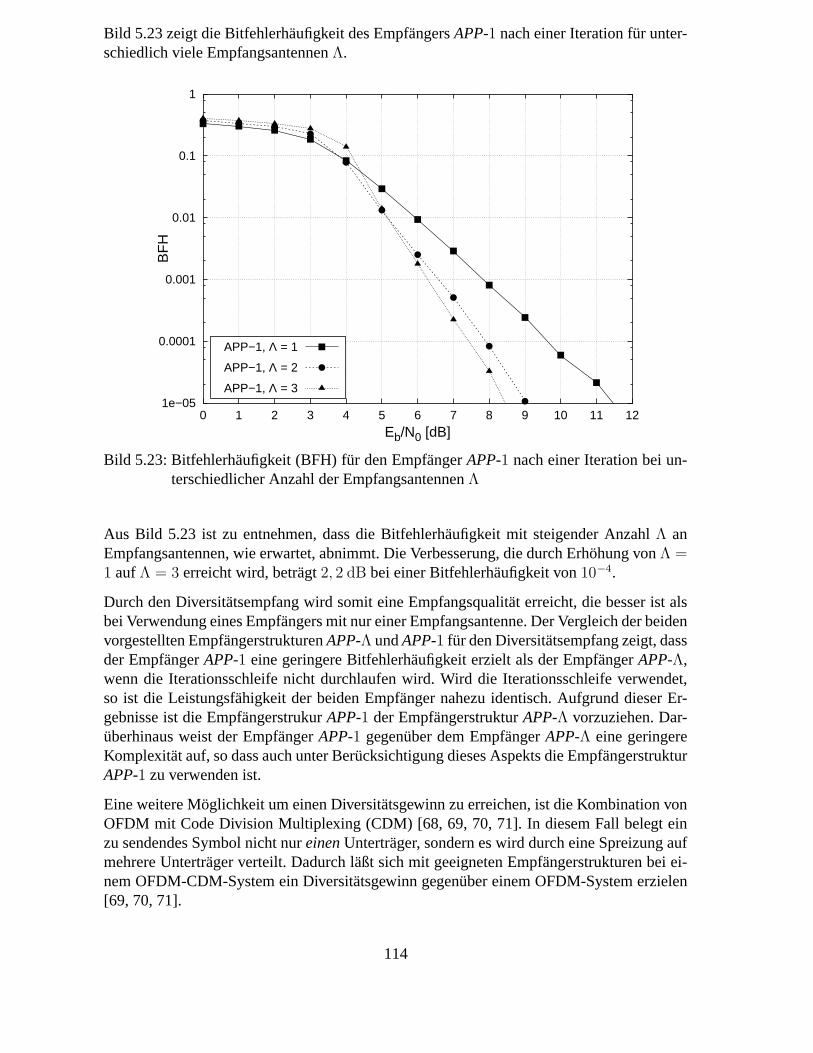
Bild 5.23 zeigt die Bitfehlerhäufigkeit des Empfängers APP-1 nach einer Iteration für unter-schiedlich viele Empfangsantennen Λ.
1e−05
0.0001
0.001
0.01
0.1
1
0 1 2 3 4 5 6 7 8 9 10 11 12
BF
H
Eb/N0 [dB]
APP−1, Λ = 1
APP−1, Λ = 2
APP−1, Λ = 3
Bild 5.23: Bitfehlerhäufigkeit (BFH) für den Empfänger APP-1 nach einer Iteration bei un-terschiedlicher Anzahl der Empfangsantennen Λ
Aus Bild 5.23 ist zu entnehmen, dass die Bitfehlerhäufigkeit mit steigender Anzahl Λ anEmpfangsantennen, wie erwartet, abnimmt. Die Verbesserung, die durch Erhöhung von Λ =1 auf Λ = 3 erreicht wird, beträgt 2, 2 dB bei einer Bitfehlerhäufigkeit von 10−4.
Durch den Diversitätsempfang wird somit eine Empfangsqualität erreicht, die besser ist alsbei Verwendung eines Empfängers mit nur einer Empfangsantenne. Der Vergleich der beidenvorgestellten Empfängerstrukturen APP-Λ und APP-1 für den Diversitätsempfang zeigt, dassder Empfänger APP-1 eine geringere Bitfehlerhäufigkeit erzielt als der Empfänger APP-Λ,wenn die Iterationsschleife nicht durchlaufen wird. Wird die Iterationsschleife verwendet,so ist die Leistungsfähigkeit der beiden Empfänger nahezu identisch. Aufgrund dieser Er-gebnisse ist die Empfängerstrukur APP-1 der Empfängerstruktur APP-Λ vorzuziehen. Dar-überhinaus weist der Empfänger APP-1 gegenüber dem Empfänger APP-Λ eine geringereKomplexität auf, so dass auch unter Berücksichtigung dieses Aspekts die EmpfängerstrukturAPP-1 zu verwenden ist.
Eine weitere Möglichkeit um einen Diversitätsgewinn zu erreichen, ist die Kombination vonOFDM mit Code Division Multiplexing (CDM) [68, 69, 70, 71]. In diesem Fall belegt einzu sendendes Symbol nicht nur einen Unterträger, sondern es wird durch eine Spreizung aufmehrere Unterträger verteilt. Dadurch läßt sich mit geeigneten Empfängerstrukturen bei ei-nem OFDM-CDM-System ein Diversitätsgewinn gegenüber einem OFDM-System erzielen[69, 70, 71].
114
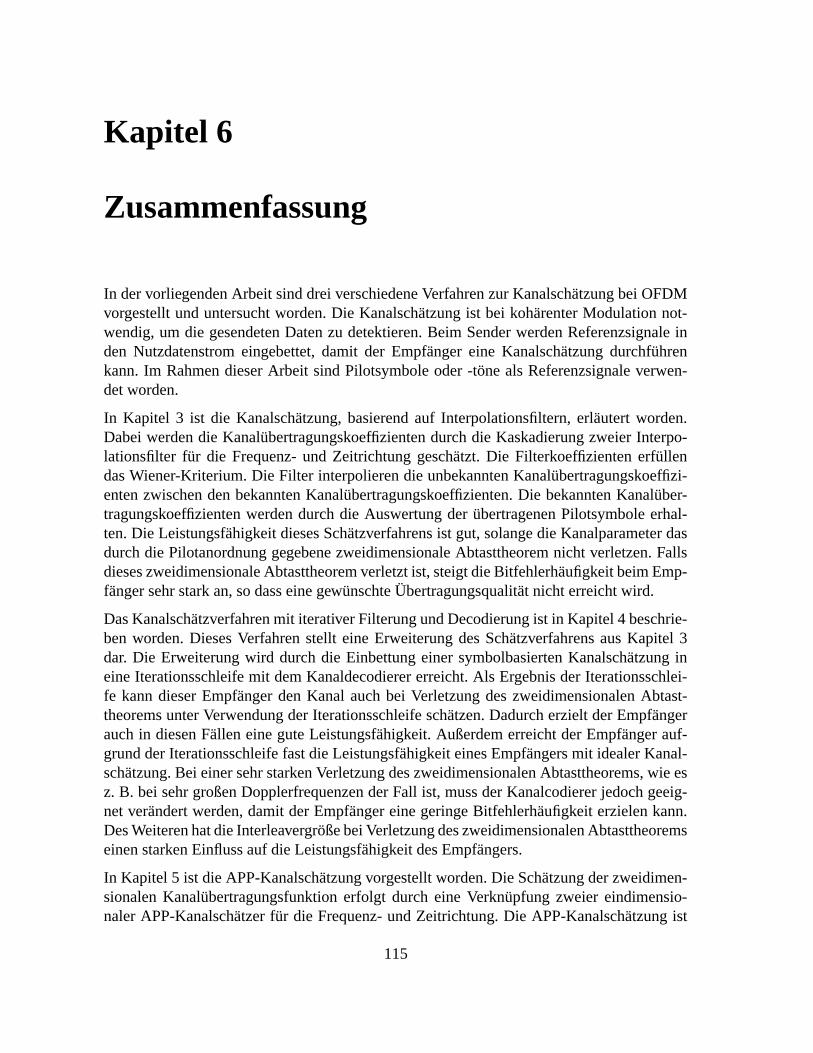
Kapitel 6
Zusammenfassung
In der vorliegenden Arbeit sind drei verschiedene Verfahren zur Kanalschätzung bei OFDMvorgestellt und untersucht worden. Die Kanalschätzung ist bei kohärenter Modulation not-wendig, um die gesendeten Daten zu detektieren. Beim Sender werden Referenzsignale inden Nutzdatenstrom eingebettet, damit der Empfänger eine Kanalschätzung durchführenkann. Im Rahmen dieser Arbeit sind Pilotsymbole oder -töne als Referenzsignale verwen-det worden.
In Kapitel 3 ist die Kanalschätzung, basierend auf Interpolationsfiltern, erläutert worden.Dabei werden die Kanalübertragungskoeffizienten durch die Kaskadierung zweier Interpo-lationsfilter für die Frequenz- und Zeitrichtung geschätzt. Die Filterkoeffizienten erfüllendas Wiener-Kriterium. Die Filter interpolieren die unbekannten Kanalübertragungskoeffizi-enten zwischen den bekannten Kanalübertragungskoeffizienten. Die bekannten Kanalüber-tragungskoeffizienten werden durch die Auswertung der übertragenen Pilotsymbole erhal-ten. Die Leistungsfähigkeit dieses Schätzverfahrens ist gut, solange die Kanalparameter dasdurch die Pilotanordnung gegebene zweidimensionale Abtasttheorem nicht verletzen. Fallsdieses zweidimensionale Abtasttheorem verletzt ist, steigt die Bitfehlerhäufigkeit beim Emp-fänger sehr stark an, so dass eine gewünschte Übertragungsqualität nicht erreicht wird.
Das Kanalschätzverfahren mit iterativer Filterung und Decodierung ist in Kapitel 4 beschrie-ben worden. Dieses Verfahren stellt eine Erweiterung des Schätzverfahrens aus Kapitel 3dar. Die Erweiterung wird durch die Einbettung einer symbolbasierten Kanalschätzung ineine Iterationsschleife mit dem Kanaldecodierer erreicht. Als Ergebnis der Iterationsschlei-fe kann dieser Empfänger den Kanal auch bei Verletzung des zweidimensionalen Abtast-theorems unter Verwendung der Iterationsschleife schätzen. Dadurch erzielt der Empfängerauch in diesen Fällen eine gute Leistungsfähigkeit. Außerdem erreicht der Empfänger auf-grund der Iterationsschleife fast die Leistungsfähigkeit eines Empfängers mit idealer Kanal-schätzung. Bei einer sehr starken Verletzung des zweidimensionalen Abtasttheorems, wie esz. B. bei sehr großen Dopplerfrequenzen der Fall ist, muss der Kanalcodierer jedoch geeig-net verändert werden, damit der Empfänger eine geringe Bitfehlerhäufigkeit erzielen kann.Des Weiteren hat die Interleavergröße bei Verletzung des zweidimensionalen Abtasttheoremseinen starken Einfluss auf die Leistungsfähigkeit des Empfängers.
In Kapitel 5 ist die APP-Kanalschätzung vorgestellt worden. Die Schätzung der zweidimen-sionalen Kanalübertragungsfunktion erfolgt durch eine Verknüpfung zweier eindimensio-naler APP-Kanalschätzer für die Frequenz- und Zeitrichtung. Die APP-Kanalschätzung ist
115

analog zur Kanalschätzung in Kapitel 4 in eine Iterationsschleife mit dem Kanaldecodierereingebettet. Dieses Schätzverfahren nützt zusätzlich zur Kontinuität der Kanalübertragungs-funktion das begrenzte Symbolalphabet der Sendesymbole aus. Die beiden Schätzverfahrenaus Kapitel 3 und 4 verwenden nur den Aspekt der Kontinuität der Kanalübertragungsfunk-tion. Die Leistungsfähigkeit des Empfängers mit APP-Kanalschätzung ist nahezu identischmit der Leistungsfähigkeit des Empfängers aus Kapitel 4 für die Fälle, bei denen das zwei-dimensionale Abtasttheorem nicht allzu stark verletzt ist. Bei einer sehr starken Verletzungdes zweidimensionalen Abtasttheorems übertrifft die Leistungsfähigkeit des Empfängers mitAPP-Kanalschätzung deutlich die Leistungsfähigkeit des Empfängers aus Kapitel 4. Damitzeigt der Empfänger mit APP-Kanalschätzung keine Abhängigkeit vom zweidimensionalenAbtasttheorem. Darüberhinaus hat die Interleavergröße einen wesentlich geringeren Einflussauf die Leistungsfähigkeit dieses Verfahrens im Vergleich zum Empfänger aus Kapitel 4.Ein weiterer Vorteil der APP-Kanalschätzung ist, dass die Anordnung der Pilottöne nicht anein regelmäßiges Raster gebunden ist. Damit kann die Effizienz des Übertragungsverfahrensgesteigert werden.
116
Literaturverzeichnis
[1] Bingham J. A. C.: Multicarrier Modulation for Data Transmission: An Idea WhoseTime Has Come. IEEE Commun. Magazine, Vol. 28, No. 5, S. 5–14, Mai 1990.
[2] European Telecommunication Standard ETS 300 744: Digital Video Broadcasting(DVB); Framing structure, channel coding and modulation for digital Terretrial te-levision (DVB-T). Ausg. März 1997.
[3] Classen, F.; Speth, M.; Meyr, H.: Channel Estimation Units for an OFDM System sui-table for Mobile Communication. ITG-Fachbericht. Bd. 135: Mobile Kommunikation.Offenbach: VDE Verlag, S. 457–466, 1995.
[4] Li, Y.; Cimini, L. J.; Sollenberger, N. R.: Robust Channel Estimation for OFDM Sys-tems with Rapid Dispersive Fading Channels. IEEE Trans. Commun., Vol. 46, No. 7,S. 902–915, Juli 1998.
[5] Weiß, F.: Identifikation des zeitvarianten Mobilfunkkanals mit analogen und digitalenRundfunksignalen. Dissertation, Universität Stuttgart, Shaker Verlag, Aachen, 1997.
[6] Bello, P. A.: Charaterization of Randomly Time-Variant Linear Channels. IEEE Trans.Commun. Systems, S. 360–393, Dezember 1963.
[7] Cox, D. C.: 910 MHz Urban Mobile Radio Propagation: Multipath Characteristics inNew York City. IEEE Trans. Vehicular Tech., Vol. 22, No. 4, S. 104–110, November1973.
[8] Parsons, J. D.; Bajwa, A. S.: Wideband characterisation of fading mobile radio chan-nels. IEE Proc., Part F, Vol. 129, No. 2, April 1982.
[9] Höher, P.: Kohärenter Empfang trelliscodierter PSK-Signale auf frequenzselektivenMobilfunkkanälen – Entzerrung, Decodierung und Kanalparameterschätzung. VDI-Verlag, Düsseldorf, 1990.
[10] Sandell, M.: Design and Analysis of Estimators for Multicarrier Modulation and Ultra-sonic Imaging. Dissertation, Luleå University of Technology, Division of Signal Pro-cessing, Luleå, Sweden, September 1996.
[11] Jakes, W. C.: Microwave Mobile Communications. Classic Reissue, IEEE Press, Pisca-taway, New Jersey, 1974.
[12] COST 207: Digital land mobile radio communications. Commission of the EuropeanCommunities, Final report, Luxembourg, 1989.
117
[13] Russel, M.; Stüber, G. L.: Interchannel Interference Analysis of OFDM in a MobileEnviroment. Proc. IEEE Veh. Technol. Conf., S. 820–824, 1995.
[14] Hutter, A. A.; Hasholzner, R.; Hammerschmidt, J. S.: Channel Estimation for MobileOFDM Systems. Proc. IEEE Veh. Technol. Conf., S. 305–309, September 1999.
[15] Hutter, A. A.; Hammerschmidt, J. S.: A Simple Smart Antenna Approach to Reduce theError Floor for Mobile OFDM Systems. Proc. Inter. Conf. Telecommun., May 2000.
[16] Robertson, P.; Kaiser, S.: The Effect of Doppler Spreads in OFDM(A) Mobile RadioSystems. Proc. IEEE Veh. Technol. Conf., S. 329–333, September 1999.
[17] Li, Y.; Cimini, L. J.: Bounds on the Interchannel Interference of OFDM in Time-VaryingImpairments. IEEE Trans. Commun., Vol. 49, No. 3, S. 401–404, März 2001.
[18] ten Brink, S.; Speidel, J.; Yan, R.-H.: Iterative demapping for QPSK modulation. IEEElectronic Letters, Vol. 34, No. 15, S. 1459–1460, Juli 1998.
[19] ten Brink, S.; Speidel, J.; Yan, R.-H.: Iterative Demapping and Decoding for MultilevelModulation. Proc. IEEE Global Commun. Conf. (GLOBECOM), S. 579-584, Novem-ber 1998.
[20] Hagenauer, J.; Offer, E.; Papke, L.: Iterative Decoding of Binary Block and Convolu-tional Codes. IEEE Trans. Inform. Theory, Vol. 42, No. 2, S. 429–445, März 1996.
[21] Sklar, B.: A Primer on Turbo Code Concepts. IEEE Commun. Magazine, Vol. 35, No.12, S. 94–102, Dezember 1997.
[22] Hoeher, P.; Lodge, J.: Iterative decoding/demodulation of coded DPSK systems. Proc.IEEE Global Commun. Conf. (GLOBECOM), S. 598–603, November 1998.
[23] Bahl, L. R.; Cocke, J.; Jelinek, F.; Raviv, J.: Optimal Decoding of Linear Codes forMinimizing Symbol Error Rate. IEEE Trans. Inform. Theory, Vol. 20, S. 284–287, März1974.
[24] Speth M.; Meyr, H.: Complexity Constrained Channel Estimation for OFDM BasedTransmission over Fast Fading Channels. Proc. 3rd European Personal Mobile Com-mun. Conf. (EPMCC), März 1999.
[25] Speth, M.; Fechtel, S.; Fock, G.; Meyr, H.: Optimum Receiver Design for OFDM-BasedBroadband Transmission – Part II: A Case Study. IEEE Trans. Commun., Vol. 49, No.4, S. 571–578, April 2001.
[26] Höher, P.; Kaiser, S.; Robertson, P.: Two-dimensional pilot-symbol-aided channel esti-mation by Wiener filtering. Proc. IEEE Internat. Conf. Acoustics, Speech, and SignalProcessing (ICASSP), S. 1845–1848, April 1997.
[27] Höher, P.; Kaiser, S.; Robertson, P.: Pilot-symbol-aided channel estimation in time andfrequency. Proc. Int. Workshop on Multi-Carrier Spread-Spectrum, Kluver AcademicPublishers, S.169–178, 1997.
118
[28] Höher, P.; Kaiser, S.; Robertson, P.: Pilot-symbol-aided channel estimation in time andfrequency. Proc. Sixth Communication Theory Mini-Conference (IEEE GLOBECOM),S. 90–96, November 1997.
[29] Ohm, M.: Untersuchung verschiedener Pilotanordnungen zur Kanalschätzung beiOFDM. Studienarbeit, Institut für Nachrichtenübertragung, Universität Stuttgart, 1999.
[30] Hayes, M. H.: Statistical digital Signal Processing and Modeling. John Wiley & Sons,Inc., 1996.
[31] Sanzi, F.; Speidel, J.: An Adaptive Two-Dimensional Channel Estimator for WirelessOFDM with Application to Mobile DVB-T. IEEE Trans. Broadcasting, Vol. 46, No. 2,S. 128–133, Juni 2000.
[32] Lüder, E.: Systemtheorie I. Vorlesung, Institut für Netzwerk- und Systemtheorie,Univeistät Stuttgart, Wintersemester 93/94.
[33] Necker, M.: Adaptive Filterung zur verbesserten Kanalschätzung bei OFDM. Studien-arbeit, Institut für Nachrichtenübertragung, Universität Stuttgart, 2000.
[34] Necker, M.; Sanzi, F.; Speidel, J.: An Adaptive Wiener-Filter for Improved ChannelEstimation in mobile OFDM-Systems. IEEE Intern. Symp. on Signal Proc. and Inform.Tech., S. 213–216, Dezember 2001.
[35] Berrou, C.; Glavieux, A.; Thitimajshima, P.: Near Shannon Limit Error-Correcting Co-ding and Decoding: Turbo-Codes. Proc. IEEE Intern. Conf. on Commun. (ICC), S.1064–1070, 1993.
[36] Benedetto, S.; Divsalar, D.; Montorsi, G.; Pollara, F.: Serial Concatenation of Inter-leaved Codes: Performance Analysis, Design, and Iterative Decoding. IEEE Trans. In-form. Theory, Vol. 44, No. 3, S. 909–926, Mai 1998.
[37] Douillard, C.; Jézéquel, M.; Berrou, C.; Picart, A.; Diddier, P.; Glavieux, A.: Iterati-ve Correction of Intersymbol Interference: Turbo-Equalization. European Trans. Tele-comm., Vol. 6, No. 5, S. 507–511, September 1995.
[38] Bauch, G.; Khorram, H.; Hagenauer, J.: Iterative Equalization and Decoding in Mo-bile Communications Systems. Proc. Second European Personal Mobile Comm. Conf.(EPMCC), S. 307–312, Oktober 1997.
[39] Bauch, G.; Franz, V.: Iterative Equalization and Decoding for the GSM-System. Proc.IEEE Vehicular Techn. Conf. (VTC), S. 2262–2266, 1998.
[40] Franz, V.; Bauch, G.: Turbo-Detection for Enhanced Data for GSM Evolution. Proc.IEEE Vehicular Techn. Conf. (VTC-Fall), S. 2954–2958, 1999.
[41] Jordan, F.; Kammeyer, K.-D.: On the Application of Turbo Equalizers in GSM Compa-tible Receivers. Proc. Intern. Symp. on Signals, Systems, and Electronics (ISSSE), S.460–464, 1998.
119

[42] Jordan, F.; Kammeyer, K.-D.: A Study on Iterative Decoding Techniques Applied toGSM Full-Rate Channels. Proc. IEEE Intern. Personal, Indoor and Mobile RadioComm. (PIMRC), S. 1066–1070, 1998.
[43] Sandell, M.; Luschi, C.; Strauch, P.; Yan, R.: Iterative Channel Estimation using softDecision Feedback. Proc. IEEE Global Telecomm. Conf. (GLOBECOM), S. 3728–3733, 1998.
[44] Strauch, P.; Luschi, C.; Sandell, M.; Yan, R.: Turbo Euqalization for an 8-PSK Modula-tion Scheme in a Mobile TDMA Communication System. Proc. IEEE Vehicular Techn.Conf. (VTC-Fall), S. 1605–1609, 1999.
[45] Strauch, P.; Luschi, C.; Kuzminskiy, A. M.: Iterative Channel Estimation for EGPRS.Proc. IEEE Vehicular Techn. Conf. (VTC-Fall), S. 2271–2277, 2000.
[46] Su, H.-J.; Geraniotis, E.: Improved Performance of a PSAM System with Iterative Filte-ring and Decoding. Proc. Thirty-Sixth Annual Allerton Conf. on Comm., Control andComputing, S. 156–166, 1998.
[47] Su, H.-J.; Geraniotis, E.: Low-Complexity Joint Channel Estimation and Decodingfor Pilot Symbol-Assited Modualtion and Multiple Differential Detection Systems withCorrelated Rayleigh Fading. IEEE Trans. Comm., Vol. 50, No. 2, S. 249–261, Februar2002.
[48] Valenti, M. C.; Woerner, B. D.: Refined Channel Estimation for Coherent Detection ofTurbo Codes over Flat-Fading Channels. IEEE Electronic Letters, Vol. 34, No. 17, S.1648–1649, Agust 1998.
[49] Valenti, M. C.; Woerner, B. D.: A Bandwidth Efficient Pilot Symbol Technique for Co-herent Detection of Turbo Codes over Fading Channels. Proc. IEEE Military Comm.Conf. (MILCOM), S. 81–85, 1999.
[50] Valenti, M. C.: Iterative Channel Estimation for Turbo Codes over Fading Channels.Proc. IEEE Wireless Comm. and Networking Conf. (WCNC), S. 1019–1024, 2000.
[51] Valenti, M. C.; Woerner, B. D.: Iterative Channel Estimation and Decoding of PilotSymbol Assisted Turbo Codes over Fading Channels. IEEE Journal on Selected Areasin Comm., Vol. 19, No. 9, S. 1697–1705, September 2001.
[52] ten Brink, S.: Convergence of iterative decoding. IEE Electronic Letters, Vol. 35, No.13, S. 1117–1119, Juni 1999.
[53] ten Brink, S.: Iterative Decoding Trajectories of Parallel Concatenated Codes. Proc.3rd IEEE/ITG Conf. Source and Channel Coding, S. 75–80, Januar 2000.
[54] ten Brink, S.: Design of Serially Concatenated Codes based on Iterative DecodingConvergence. 2nd Intern. Symp.on Turbo Codes, S. 319–322, September 2000.
[55] ten Brink, S.: Convergence Behavior of Iteratively Decoded Parallel Concatenated Co-des. IEEE Trans. Comm., Vol. 49, No. 10, S. 1727–1737, Oktober 2001.
120
[56] ten Brink, S.: Design of Concatenated Coding Schemes based on Iterative DecodingConvergence. Dissertation, Universität Stuttgart, 2001.
[57] Sanzi, F.; ten Brink, S.: Iterative Channel Estimation and Decoding with Product Codesin Multicarrier Systems. Proc. IEEE Vehicular Techn. Conf. (VTC), S. 1338–1344,September 2000.
[58] ten Brink, S.; Sanzi, F.; Speidel, J.: Two-Dimensional Iterative APP Channel Estimationand Decoding for OFDM Systems. Proc. IEEE Global Commun. Conf. (GLOBECOM),S. 741–745, November 2000.
[59] Rinne, J.: Subcarrier-based Selection Diversity Reception of DVB-T in a Mobile Envi-ronment. Proc. IEEE Vehicular Techn. Conf. (VTC), S. 1043–1047, 1999.
[60] Rinne, J.: Some Elementary Suboptimal Diversity Reception Schemes for DVB-T inMobile Conditions. IEEE Trans. Consumer Electronics, Vol. 46, No. 3, S. 847–850,August 1998.
[61] Rinne, J.: Diversity Reception Schemes for COFDM in a Mobile Environment Utili-zing Soft-Bit Information. Proc. IEEE Intern. Conf. on Commun. (ICC), S. 3041–3045,2001.
[62] Hutter, A. A.; Hammerschmidt, J. S.; de Carvalho, E.: Effects of Fading Correlationon Multiple Antenna Reception Mobile OFDM Systems. Proc. IEEE Vehicular Techn.Conf. (VTC), S. 2744–2749, September 2000.
[63] Hutter, A. A.; Hammerschmidt, J. S.; de Carvalho, E.; Cioffi, J. M.: Receive Diver-sity for Mobile OFDM Systems. Proc. IEEE Wireless Commun. Networking Conf.(WCNC), S. 707–712, 2000.
[64] Hutter, A. A.; de Carvalho, E.; Cioffi, J. M.: On the impact of channel estimation formultiple antenna diversity reception in mobile OFDM systems. Proc. 34th AsilomarConf. on signals, Systems and Computers, S. 1820–1824, 2000.
[65] Hutter, A. A.: Design of OFDM Systems for Frequency-Selective and Time-VariantChannels. Proc. Intern. Zürich Seminar on Broadband Commun., Access, Transmissi-on, Networking, S. 39 1–39 6, 2002.
[66] Parsons, J. D.: The Mobile Radio Propagation Channel. John Wiley & Sons Ltd., Chi-chester, 2000.
[67] Hochwald, B. M.; ten Brink, S.: Achieving Near-Capacity on a Multiple-Antenna Chan-nel. Proc. Allerton Conf. on Comm., Control and Computing, Oktober 2001.
[68] Fettweis, G.; Shaikh Bahai, A.; Anvari, K.: On Multi-Carrier Code Division MultipleAccess (MC-CDMA) Modem Design. Proc. IEEE Vehicular Techn. Conf. (VTC), S.1670–1674, 1994.
[69] Kaiser, S.: Performance of Multi-Carrier CDM and COFDM in Fading Channels. Proc.IEEE Global Commun. Conf. (GLOBECOM), S. 847–851, 1999.
121
[70] Kaiser, S.: OFDM Code-Division Multiplexing in Fading Channels. IEEE Trans. Com-mun., Vol. 50, No. 8, S. 1266–1273, August 2002.
[71] Sanzi, F.; Slama, A.; Speidel, J.: Multicarrier Code Division Multiplex with iterati-ve MAP Symbol-by-Symbol Estimation. Proc. IEEE Global Commun. Conf. (GLOBE-COM), S. 886–890, 2001.
122