Embed Size (px)
Citation preview

Kashima RAy-Tracing Service:KARATS
ICHIKAWA Ryuichi1 ([email protected]),Thomas HOBIGER2,HASEGAWA Shingo1,TSUTSUMI Masanori1,KOYAMA Yasuhiro2,KONDO Tetsuro1
1Kashima Space Research Center, NationalInstitute of Information and CommunicationsTechnology, 893-1 Hirai, Kashima, Ibaraki314-8501, Japan
2Space-Time Standards Group,NationalInstitute of Information and CommunicationsTechnology, 4-2-1, Nukui-Kitamachi, Koganei,Tokyo 184-8795, Japan
Abstract: The ray tracing tools, which we havenamed ’KAshima RAytracing Tools (KARAT)’,are capable of calculating total slant delays andray-bending angles considering real atmosphericphenomena. We compared PPP solutions us-ing KARAT with that using the Global MappingFunction (GMF) and Vienna Mapping Function1 (VMF1) for GPS sites of the GEONET (GPSEarth Observation Network System) operated byGeographical Survey Institute (GSI). Our compar-isons show the KARAT solutions are almost iden-tical or slightly better than the solutions usingVMF1 and GMF with linear gradient model forhorizontal and height positions. In addition wehave started the web-base service “KARATS” forreducing atmospheric delay error from the RINEXfile.
1. Introduction
We have developed a state-of-art tool to ob-tain atmospheric slant path delays by ray-tracingthrough the meso-scale analysis data from nu-merical weather prediction with 10 km horizontalresolution provided by the Japan MeteorologicalAgency (JMA)[1, 2]. The tool, which we havenamed ’KAshima RAytracing Tools (KARAT)’,is capable of calculating total slant delays andray-bending angles considering real atmosphericphenomena. Based on the evaluations of theKARAT performance, we have started the web-based online service, ’KAshima RAytracing Ser-vice (KARATS)’ for providing the atmosphericdelay correction of RINEX files on Jan 27th,2010. The KARATS receives user’s RINEX datavia a proper web site (http://vps.nict.go.jp/karats/index.html) and processes user’s data
files. In this short report we describe the recentperformance of the KARAT and KARATS service.
2. KARAT and its performance
The KARAT can estimate atmospheric slant de-lays by three different calculation scheme[2]. Theseare (1) a piece-wise linear propagation, (2) an an-alytical 2-D ray-propagation model[3], and (3) a3-D Eikonal equation. Though the third schemecan include small scale variability of atmosphere inthe horizontal component, it has a significant dis-advantage due to the massive computational load.
In order to compare KARAT processing andmodern mapping functions we analyzed data sets ofGEONET, which is a nationwide GPS network op-erated by GSI. In our comparison 57 stations fromGEONET of the year 2008 were considered for pro-cessing. We selected the stations which were notaffected by crustal deformations caused by seismicactivities. Since these 57 stations are distributedover the whole Japan islands evenly, we can inves-tigate effects of various weather conditions on theprocessing. In addition, we can avoid uncertain-ties due to the individual difference of equipmentsin term of the same type of antenna-receiver setin GEONET. The precise point positioning (PPP)processing were carried out using GPSTOOLS[4].
2.1 Monthly Averaged Repeatability
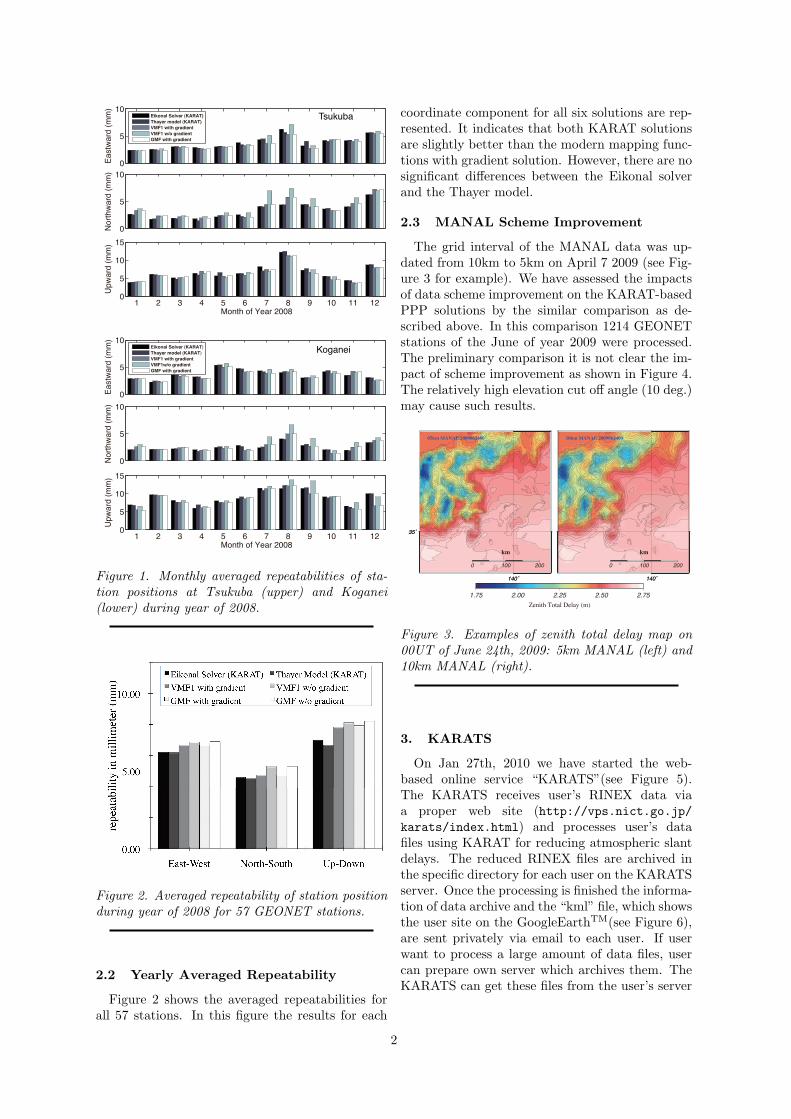
In order to examine the position error magnitudethe monthly averaged repetabilities for each coor-dinate component at both stations are displayedin Figure 1. In this figure five cases of solutions(i.e. Eikonal solver, Thayer model[3], VMF1[5, 7]with gradient[8], VMF1 without gradient, GMF[6]with gradient, and GMF without gradient) areshown. The results of VMF1 without gradient re-veal the largest repeatability value for all compo-nents at both stations during the summer season(July, August, and September), as one would ex-pect. Tsukuba and Koganei have undergone severeheavy rainfall event during August 26-31, 2008.Especially, the total rainfall around Tsukuba wasabout 300 mm during these 6 days. The north-south position errors were caused by steep watervapor gradient associated with an EW rain bandwhich lies around both stations. Such large po-sition errors are partly reduced using the modernmapping functions with gradient model. On theother hand, the results of KARAT solutions (boththe Eikonal solver and the Thayer model) are muchbetter for the north-south component at the bothstation during the July and August. These suggestthat the both KARAT solutions are quite compet-itive to the modern mapping functions with gradi-ent model.
1
0
5
10
No
rth
wa
rd (
mm
)
1 2 3 4 5 6 7 8 9 10 11 120
5
10
15
Month of Year 2008
Up
wa
rd (
mm
)
0
5
10E
astw
ard
(m
m)
Eikonal Solver (KARAT)
Thayer model (KARAT)
VMF1 with gradient
VMF1 w/o gradient
GMF with gradient
Tsukuba
0
5
10
Ea
stw
ard
(m
m)
Eikonal Solver (KARAT)
Thayer model (KARAT)
VMF1 with gradient
VMF1w/o gradient
GMF with gradient
0
5
10
No
rth
wa
rd (
mm
)
1 2 3 4 5 6 7 8 9 10 11 120
5
10
15
Month of Year 2008
Up
wa
rd (
mm
)
Koganei
Figure 1. Monthly averaged repeatabilities of sta-tion positions at Tsukuba (upper) and Koganei(lower) during year of 2008.
Figure 2. Averaged repeatability of station positionduring year of 2008 for 57 GEONET stations.
2.2 Yearly Averaged Repeatability
Figure 2 shows the averaged repeatabilities forall 57 stations. In this figure the results for each
coordinate component for all six solutions are rep-resented. It indicates that both KARAT solutionsare slightly better than the modern mapping func-tions with gradient solution. However, there are nosignificant differences between the Eikonal solverand the Thayer model.
2.3 MANAL Scheme Improvement
The grid interval of the MANAL data was up-dated from 10km to 5km on April 7 2009 (see Fig-ure 3 for example). We have assessed the impactsof data scheme improvement on the KARAT-basedPPP solutions by the similar comparison as de-scribed above. In this comparison 1214 GEONETstations of the June of year 2009 were processed.The preliminary comparison it is not clear the im-pact of scheme improvement as shown in Figure 4.The relatively high elevation cut off angle (10 deg.)may cause such results.
1.75 2.00 2.25 2.50 2.75
Zenith Total Delay (m)
140˚
35˚
140˚
35˚
0 100 200
05km MANAL 2009062400
km
140˚140˚
0 100 200
10km MANAL 2009062400
km
Figure 3. Examples of zenith total delay map on00UT of June 24th, 2009: 5km MANAL (left) and10km MANAL (right).
3. KARATS
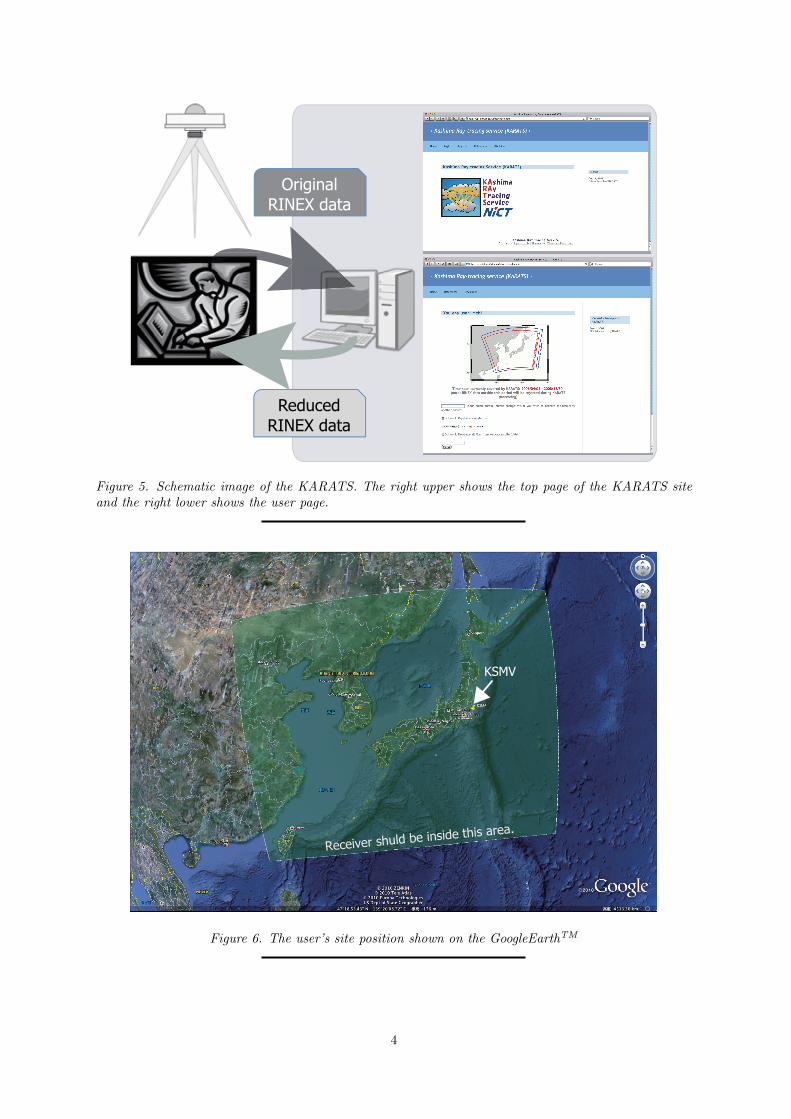
On Jan 27th, 2010 we have started the web-based online service “KARATS”(see Figure 5).The KARATS receives user’s RINEX data viaa proper web site (http://vps.nict.go.jp/karats/index.html) and processes user’s datafiles using KARAT for reducing atmospheric slantdelays. The reduced RINEX files are archived inthe specific directory for each user on the KARATSserver. Once the processing is finished the informa-tion of data archive and the “kml” file, which showsthe user site on the GoogleEarthTM(see Figure 6),are sent privately via email to each user. If userwant to process a large amount of data files, usercan prepare own server which archives them. TheKARATS can get these files from the user’s server
2

Figure 4. Averaged repeatability of station positionduring June 2009 for 1214 GEONET stations.
using “GNU wget” and performs ray-traced correc-tions. At present KARATS online registration hasbeen disabled. If one want to use it, please contactus via email and we will create an user account foryou.
4. Summary and Outlook
The KARAT solution is almost identical to thesolution using VMF1 (Vienna mapping function 1)with linear gradient model and some cases tends tobe slightly better. On the other hand, the impactof the MANAL scheme improvement on KARATsolutions is not clear at present. In addition thescheme improvement of the JMA MANAL dataset has no impact on the KARAT processing atpresent. We have started the web-based online ser-vice KARATS (http://vps.nict.go.jp/karats/index.html) for providing the atmospheric delaycorrection of RINEX files on Jan 27th, 2010. Oneadvantage of KARAT is that the reduction of at-mospheric path delay will become more accurateeach time the numerical weather model are im-proved (i.e. time and spatial resolution, includingnew observation data). On October 27, 2009 theJMA started data assimilation of zenith wet delayobtained by the GEONET for meso-scale numeri-cal weather prediction. We are now preparing toevaluate the impacts of the assimilation strategychange on the slant delay reduction.
5. Acknowledgements
We would like to thank the Geographical SurveyInstitute, Japan for providing GEONET data sets.We also thank the Japan Meteorological Agencyfor providing data and products. This study wassupported by a Grant-in-Aid for Scientific Research
A (No. 21241043) from the Japan Society for thePromotion of Science.
References
[1] Hobiger, T., Ichikawa R., Takasu T.,Koyama Y. and Kondo T., Ray-traced tropo-sphere slant delays for precise point position-ing, Earth Planets Space, 60, e1–e4, 2008a.
[2] Hobiger, T., Ichikawa R., Koyama Y. andKondo T., Fast and accurate ray-tracing al-gorithms for real-time space geodetic ap-plications using numerical weather mod-els, J. Geophys. Res., 113, D203027, 1–14,doi:10.1029/2008JD010503, 2008b.
[3] Thayer, G. D., A rapid and accurate ray trac-ing algorithm for a horizontally stratified at-mosphere, Radio Sci., 1(2), 249–252, 1967.
[4] Takasu, T. and Kasai S., Evaluation of GPSPrecise Point Positioning (PPP) Accuracy, IE-ICE Technical Report, 105(208), 40–45, 2005.
[5] Boehm, J. and H. Schuh, Vienna MappingFunctions in VLBI analyses, Geophys. Res.Lett., 31, L01603, doi:10.1029/2003GL018984,2004.
[6] Boehm, J., A. Niell, P. Tregoning, andH. Schuh, Global Mapping Function (GMF):A new empirical mapping function based onnumerical weather model data, Geophys. Res.Lett., 33, L07304, doi:10.1029/2005GL025546,2006a.
[7] Boehm, J., B. Werl, and H. Schuh, Tropo-sphere mapping functions for GPS and verylong baseline interferometry from EuropeanCentre for Medium-Range Weather Forecastsoperational analysis data, J. Geophys.Res.,111, B02406, doi:10.1029/2005JB003629,2006b.
[8] MacMillan, D. S., Atmospheric gradients fromvery long baseline interferometry observa-tions, Geophys. Res. Lett., 22, pp.1041–1044,1995.
3
Reduced
RINEX data
Original
RINEX data
Figure 5. Schematic image of the KARATS. The right upper shows the top page of the KARATS siteand the right lower shows the user page.
KSMV
Receiver shuld be inside this area.
Figure 6. The user’s site position shown on the GoogleEarthTM
4





























