-
7/30/2019 Kinematics of Rigid Body
1/6
Chapter 2Kinematics of Rigid Bodies
2.1 lntroductionRigid BodyA rigid body is a body consisting of a
large number of particles, with the relative distancebetween these
particles being constant. When the body moves, every particle in
the bodywill move according to its own locus or path depending on
the nature of the motionundergone by the rigid body.Types of Rigid
Body Motion.The motion of a rigid body may be categorized into :o
Rectilinear motion - or motion in a straight lineo Circular motion
- or rotation about afixed axiso Curvilinear motion - or general
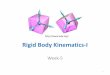
motionFigure 2.I shows a mechanism, known asslider-uanft, which is
widely used as the basisfor numerous machines. In this
mechanism,piston B undergoes rectilinear motion, whilecrank OA
undergoes circular motion.Connecting rod AB undergoes
curvilinearmotion.These types of motion will be studied in
greaterdetail in the ensuing sections..
2.2 Rectilinear MotionIn this type of motion, all the particles
in a rigid bodymove in paths that are straight and parallel to
oneanother as shown in Figure 2.2.In this figure, it can be seen
that all the particles in thebody will have exactly the same
motion, in terms ofdirection and magnitude. Consequently, the
motion ofthe rigid body can be represented by the motion of
asuitably chosen point or particle. Such point is usuallythe centre
of gravity of the body, and its motion can beanalysed using the
method for kinematics of particles.
Figure 2.1
Figure2.2
-
7/30/2019 Kinematics of Rigid Body
2/6
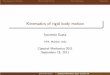
2.3 Circular MotionIn this motion, the entire rigid body rotates
about a fixed point.Strictly speaking, the body rotates about an
axis that passesthrough the fixed point, perpendicular to the plane
of therotation. The particles on the body move in circular paths
asshown in Figure 2.3.The radii of these paths will differ fromone
another, according to the distance of each particle from thecentre
of rotation.Notice that all the particles will undergo the same
amount ofrotation about the fixed point. In other words all the
particleswill have the same angular displacement about the fixed
pointO. Therefore :0r=0,where 0, is angle AOA' and 0u is angle
BOB'Successive differentiation with respect to time will yield
:
( or rrlT : roa )
Figure 2.3
oo: ouand
6r:6, (or a7 :crs)It can be seen that in this type of motion,
the angular motion of the rigid body can beknown by studying the
angular motion of a suitably chosen particle in the body, using
themethod of particle kinematics studied earlier.
2.4 Gurvilinear Motion ln Two DimensionsIn this type of motion,
a rigid body undergoes general motion in a plane. Hence thismotion
is also called general planar motion. This motion may be regarded
as being acombination of linear motion and rotation. In Figure 2.4
(a) a rigid body moves fromposition (1) to position (2).
(2)
Figure 2.4a
-
7/30/2019 Kinematics of Rigid Body
3/6
This motion maybelow.
be accomplished in two stages as shown in Figures 2.4 (b), (c)
and (d)
1)Figure 2.4bLinear motion from (1) torotation about A, from
(1')(2).
(1'), followed by ato the final position
( 1')
Figure 2.4cInitial rotation about A from (1) to (1'),followed by
linear motion from (1') to thefinal position (2).
Figure 2.4dInitial rotation about B from (1) to (1'),followed by
linear motion from (1') to(2).
lf we scrutinize Figures 2.4 (b) to (d), wewill notice important
characteristics ofrigid body motion, namely that :, The linear
component of the motion will dffir depending on the particle chosen
asour reference point.ii) The rotational component of the motion is
the same in all three /igures, Regardlessof which particle is taken
as a reference point, the magnitude of rotation is the same,
and the direction of rotation is also the same.ii, The relative
rotation between the particles is the some os the absolute rotation
of thewhole rigid body.The last observation above is in fact a very
important property of rigid body motion, and
can be clarified by the figures above. Notice that in Figures
2.4b and c, particle B rotatesabout particle A through an angle
,0u. This is rotation of B relative to A, and it takesplace in a
clockwise direction. In Figure 2.4d, particle A rotates about
particle B through
(2)
(l)
/A\t reilAJt2\ \B/'',frGN
.A
-
7/30/2019 Kinematics of Rigid Body
4/6
direction. Thus we can say that uou = Be A .If we continue this
line of analysis to otherpoints in the bodY, we can see that :t}n =
ul, = n9c = rOp = ...,.. etc.
Successive differentiation with respect to time will yield :etc.
andetc.
l@B = B0A = A@c = 8oD = ......AdB= adA= A&C= BdD=,,...,2.5
Velocity DiagramThe characteristics of rigid body motion
identifiedabove form the basis of a method for analyzing
thevelocities of rigid bodies, known as the velocitydiagram method.
To help understand this method let usconsider the case of a rod (or
ladder) sliding against avertical wall as shown in Figure
2.5.Inthis motion, therod moves from position (1) to position
(2).As in Section 2.4 above, we may regard this motion ascomprising
a linear motion from (1) to (l'), followedby a rotation about B
from (1') to (2), as shown inFigure 2.6. Consequently, the linear
velocity of everypoint in the rod is the same as the linear
velocity ofpoint B. In addition, due to the rotation about B'
otherpoints on the body will also have a tangential
velocityrelative to B. For example, point A will have a
velocityrelative to B ( called uv o ) which acts perpendicular
tothe radius BA. This relative velocity will have amagnitude of
:
nlA = uauxBAwhere u co, is the angular velocity of A relative to
B.Thus point A has two velocity components, oneproduced by the
linear motion, and another producedby rotation about B. These two
velocity componentscan be combined vectorially to give the total
velocityof A as shown in Figures 2.7a and 2.7b.
AJA
B_BFigure 2.5
Figure 2.6
AvA
B-B
Figure2.Ta Figure 2.7b
-
7/30/2019 Kinematics of Rigid Body
5/6
Figure 2.7a shows the velocity components of point A, i.e. vu
and uv, being combinedusing the parallelogram law of vector
addition, to produce the resultant vu . Notice thatthis resultant
velocity of point A must act along the surface of the vertical
wall. The sameresultant can also be obtained by the method of
completing the polygon as shown in Figure2.7b, and this is the
technique used in the vetocity diigram method. In this case,
theconstruction of the velocity diagramcomplies with the u..io,
equation:v.a = ln I at.t
The velocity diagram method is sometime referred to as the
relative velocity method. Wewill illustrate a proper procedure for
using the velocity diagram method by means of anexample.
Example 2.1A rod of length 50 cm. slides on a vertical wall as
shownin Figure Ex2.la. When 0 = 60" end B of the rod has avelocity
va = 2 cm/s to the right. Determine the velocity
Iof end A and the angular velocity of the rod at that
Iinstant.Solution:Notice that in this problem the velocity of point
B iscompletely known. In other words, its magnitude anddirection
are known. Next, the velocity of A relative to Bmust be at right
angles to the rod AB since this rod isrigid. And finally, the total
velocity of A must be along t''NutY Lrzthe vertical wall. With
these pieces of information we .* pro...d to construct the
velocitydiagram for A.This diagram is drawn starting with a line
o-b to represent the known velocity va = 2cm/s. This line is drawn
in the same direction as vo ( i.e. running left to right ), and is
of asuitable length to represent 2 cmls. The start of the line is
labeled ,o, to indicate that theline represents an absolute
velocity. Next, we draw a second line which runs perpendicularto
rod AB. This line represents the direction of the velocity of A
relative to B. This line isdrawn passing through 6. Finally, we
draw a third linewhich runs vertically to represent the direction
of thevelocity of A. This line is drawn passing through oo'
toindicate that this velocity is also an absolute velocity.We will
finally get a velocity diagram as shown inFigure Ex2.1b. The
intersection between the second andthird lines is labeled 'a' to
show that it represents thetip of the vectors for point A.From this
diagram, it can be seen that :'u - tan6o' and 'u - sin6o"v A
nv,q
l-- yBFigure Ex2.Ia
Figure Ex2.1b
-
7/30/2019 Kinematics of Rigid Body
6/6
ThereforevB2-r^---,---rlvA = -- -: = -- -- = 1.155 cm/s
downwards, and" tan60" tan60' :
ovo = ,'u - 2 =2.309cm/ssin60" sin60' ::But BvA = na.tx AB =
uro, x 50
aa.q = u!! = ry = 0.0461 8 rad/s anticlockwise.5050:More
practice work with different arrangements of rigid bodies can help
make the drawingof velocity diagrams almost an intuitive process.
Then, this method can become an easyand efficient way of finding
the velocities of rigid bodies in planar motion.












![The Kinematics Model - FAA Fire Safety Kinematics Model ... Connection to the structure by rigid body Rigid Body Rigid Body r a m e Connector-Input. ... Rigid Bodies [2] f r a e](https://img.pdfslide.net/doc/110x75/5aff25c57f8b9a994d8ffb6d/the-kinematics-model-faa-fire-safety-kinematics-model-connection-to-the-structure.jpg)