Embed Size (px)
Citation preview

KINETICS OF RIGID BODIES

The kinetics of rigid bodies treats the
relationships between the external
forces acting on a body and the
corresponding translational and
rotational motions of the body.

For this purpose, a body which can be
approximated as a thin slab with its
motion confined to the plane of the slab
will be considered to be in plane motion.
The plane of motion will contain the
mass center and all forces which act on
the body will be projected onto the
plane of motion.

In addition to the two force equations of
motion for planar motion of particles, an
additional equation is needed to specify
the state of rotation for the plane
motion of a rigid body. Thus, two force
equations and one moment equation or
their equivalent are required to
determine the state of rigid body plane
motion.

Force, Mass and Acceleration General Equations of Motion For a general rigid body in three dimensions, the force equation becomes which tells that the resultant of the external forces acting on the body equals the mass m of the body times the acceleration of its mass center G. The moment equation taken about the mass center shows that the resultant moment about the mass center of the external forces on the body equals the time rate of change of the angular momentum of the body about the mass center.
amF
a
F
GG HM

The results that will be obtained using these
relationships for a rigid body will be:
1) confined to the plane motion of the rigid
body, that is, the motion of each particle
forming the rigid body will stay at a constant
distance from a fixed reference plane.
2) composed of flat plates or symmetric bodies
with respect to a reference plane.

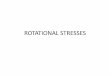
We know from statics that a general system of forces acting
on a rigid body may be replaced by a resultant force applied at
a chosen point and a corresponding couple. By replacing the
external forces by their equivalent force-couple system in
which the resultant force acts through the mass center G,
(a) Free body diagram (FBD)
(b) Equivalent force – couple diagram
(c) Kinetic diagram (KD)
we may visualize
the action of the
forces and the
corresponding
dynamic response
of the body.

Part a of the figure shows the relevant free body diagram.
Part b of the figure shows the equivalent force - couple
system with the resultant force applied through G . Part c
of the figure is a kinetic diagram, which represents the
dynamic effects as specified by the force ( ) and
moment ( ) equations. amF
GG HM
(a) Free body diagram (FBD)
(b) Equivalent force – couple diagram
(c) Kinetic diagram (KD)

The equivalence between the free body diagram (FBD) and
the kinetic diagram (KD) enables us to clearly visualize and
easily remember the separate translational and rotational
effects of the forces applied to a rigid body.
(a) Free body diagram (FBD)
(b) Equivalent force – couple diagram
(c) Kinetic diagram (KD)

Since and are
perpendicular to the plane
of motion, the scalar
notation w and may
be used to represent the
angular velocity and the
angular acceleration.
Plane Motion Equations
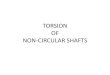
The figure represents a rigid body moving with plane motion
in the x-y plane. The mass center G has an acceleration
and the body has an angular velocity and an angular
acceleration , both in ccw direction. k
k
ww
a
w
w

The angular momentum about the mass center for a general
system is given as
where is the position vector
relative to G of the
representative particle of mass
mi . For our rigid body, the
velocity of mi relative to G is
, which has a
magnitude ri w and lies in the
plane of motion normal to .
iiiGmH rr
ir
ir
ii rwr

The summation , which may
also be written as , is
defined as the mass moment of
inertia of the body about the
z axis through G.
The product is then a vector normal to the x-y plane in
the sense of and its magnitude is ri 2w . Thus, the
magnitude of becomes
ii rr
w
GH
∫r2dm
ri2mi
I
iiiiG mmH 22 rwwr

We may now write
where is a constant property
of the body. This property is a
measure of the rotational inertia,
which is the resistance to change
in rotational velocity due to the
radial distribution of mass around
the z axis through G.
wIHG
I

With this substitution, the moment equation becomes We may now express the moment equation and the vector form of the generalized Newton’s second law of motion as
w IIHM GG
IM
amF
G

These are the general equations of
motion for a rigid body in plane motion. In
applying these equations, we express the
vector force equation in terms of its two
scalar components using x-y, n-t or r-q
coordinates, whichever is most
convenient for the problem at hand.

Alternative Moment Equations For a system of particles, the general equation for moments about an arbitrary point P is where is the vector from P to the mass center G and is the mass center acceleration. As we have seen, for a rigid body in plane motion, becomes . Also, the magnitude of the cross product is . Therefore, for the two dimensional body represented in the figure
a
amHM GP r
r
IGH
damam r
with its free body diagram and kinetic diagram, we may write
damIM P

Clearly, all three terms are positive in the ccw sense in this figure and the choice of P eliminates reference to and . The alternative moment equation about P can be arranged as For rigid body plane motion, if P is chosen as a point fixed to the body, then in scalar form becomes IP, where IP is the mass center of inertia about an axis through P and is the angular acceleration of the body.
1F
3F
PrelPP amHM
r
relPH

So we may write the equation as where the acceleration of P is and the position vector from P to G is . When , point P becomes the mass center G and the above equation reduces to the scalar form , as previously derived. When point P becomes a point O fixed in an inertial reference system and attached to the body (or the body extended), then , and the above equation reduces to, in scalar form This equation then applies to the rotation of a rigid body about a nonaccelerating point O fixed to the body.
PPP amIM
r
Pa
r
0r
OO IM
IMG
0Pa

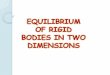
Unconstrained and Constrained Motion
The motion of a rigid body may be unconstrained or constrained.
The rocket moving in a vertical plane is an example of
unconstrained motion as there are no physical confinements to its
motion. The two components and of the mass center
acceleration and the angular acceleration may be determined
independently of one another by direct application of equations
and .
xaya
amF
IMG

The bar, on the other hand, undergoes a constrained motion, where the vertical and horizontal guides for the ends of the bar impose a kinematic relationship between the acceleration components of the mass center and the angular acceleration of the bar. Thus, it is necessary to determine this kinematic relationship from the principles established in Kinematics of Rigid Bodies and combine it with the force and moment equations of motion before a solution can be carried out.

Translation
In rigid body translation in plane motion, we know that every
line in a translating body remains parallel to its original
position at all times. In rectilinear translation, all points
move in straight lines, whereas in curvilinear translation all
points move on congruent curved paths.
In either case, there is no angular motion of the translating
body, so that both w and are zero. Therefore, from the
moment relation , we see that all reference to the
moment of inertia is eliminated for a translating body.
IMG

For a translating body, the general equations for plane motion are For rectilinear translation, as illustrated in the figure, if the x axis is chosen in the direction of the acceleration, then the two scalar force equations become and .
0
IM
amF
G
xxamF 0 yy amF

We may also employ the alternative moment equation
with the aid of the kinetic diagram. For rectilinear translation, we see
that and .
damIM P
damMP 0 AM

For curvilinear translation, if we use n-t coordinates,
the two scalar force equations become
and .
For both rectilinear and curvilinear translation
.
nnamF
ttamF
0 GM
G
ta
na

We may also employ an alternative moment equation with the aid of
the kinetic diagram. For curvilinear translation, the kinetic diagram
permits us to write in the clockwise sense and
in the counterclockwise sense. Thus, we have complete
freedom to choose a convenient moment center.
AnA damM
BtB damM
ta
na

Fixed Axis Rotation In the rotation of a rigid body about a fixed axis O, all points in the body describe circles about the rotation axis, and all lines of the body in the plane of the motion have the same angular velocity w and angular acceleration . The acceleration components of the mass center for circular motion are most easily expressed in n-t coordinates.

The accelerations become and as seen in the figure, for rotation of the rigid body about the fixed axis through O. The free body diagram and the equivalent kinetic diagram shows the force resultant in terms of its n and t components and the resultant couple . The general equations for plane motion are directly applicable as
rat 2wran
IM
amF
G
am
I

Thus, the two scalar components of the force equation
become and .
In applying the moment equation about G, we must account
for the moment of the force applied to the body at O, so this
force must not be omitted from the free body diagram.
2wrmFn rmFt

For fixed axis rotation, it is generally useful to apply a moment equation directly about the rotation axis O as
OOO
O
tO
OO
IrmrmIM
rmII
armIM
IM
22
2
0a 0FFor the common case of rotation of a rigid body about a fixed axis
through its mass center G, clearly , and therefore, . The moment of the applied forces then is . IMG

General Plane Motion The dynamics of a rigid body in general plane motion combines translation and rotation. The free body diagram and its kinetic diagram will disclose the dynamic resultants of the applied forces. The equations for this type of motion are
IM
amF
G

Acceleration again can be expressed in terms of its two scalar components. The moment equation alternatively can be written for a point P as
damIM P

Method of Analysis
The following steps will be appropriate for the solution of force-
mass-acceleration problems:
1) Kinematics First of all, the type of motion should be identified
and based on the given kinematic information, the required
linear and angular accelerations should be calculated.
2) Drawing the Diagrams For a correct analysis, the FBD should be
accurate. The FBD and the related KD should be constructed.
When doing this an appropriate reference system must be
selected.
3) Equations of Motion Application of the equations of motion
should be combined with the results of the kinematic analysis.
Care must be given that there are equal number of unknowns and
equations.

Mass Moment of Inertia

Mass Moments of Inertia About an Axis The equations of rotational motion about an axis normal to the plane of motion for a rigid body in plane motion contains an integral which depends on the distribution of mass with respect to the moment axis. This integral occurs whenever a rigid body has an angular acceleration about the axis of rotation.
Let’s consider a body of mass m rotating about an axis O-O with an angular acceleration . All particles of the body move in parallel planes which are normal to the rotation axis O-O. We may choose any one of the planes as the plane of motion, although the one containing the center of mass is usually the one so designated.

An element of mass dm has a component of acceleration tangent to its circular path equal to r, and by Newton’s second law of motion the resultant tangential force on this element equals r dm. The moment of this force about the axis O-O is r2 dm, and the sum of the moments of these forces for all elements is ∫ r2 dm.
For a rigid body, is the same for all radial lines in the body and it may be taken outside the integral sign. The remaining integral is called the mass moment of inertia, I of the body about the axis O-O and is
dmrI 2

This integral represents an important property of a body and is involved in the analysis of any body which has rotational acceleration about a given axis. Just as the mass m of a body is a measure of the resistance to translational acceleration, the moment of inertia I is a measure of resistance to rotational acceleration of the body. The moment of inertia integral may be expressed alternatively as
ii mrI2
Where ri is the radial distance from the inertia axis to the representative particle of mass mi and where the summation is taken over all particles of the body. The dimension of the mass moment of inertia is kg·m2.

Radius of Gyration The radius of gyration k of a mass m about an axis for which the moment of inertia is I is defined as Thus k is a measure of the distribution of mass of a given body about the axis in question, and its definiton is analogous to the definition of the radius of gyration for area moments of inertia. If all the mass m of a body could be concentrated at a distance k from the axis, the moment of inertia would be unchanged. The moment of inertia of a body about a particular axis is frequently indicated by specifying the mass of the body and the radius of gyration of the body about the axis.
mkI or m
Ik 2

Transfer of Axes If the moment of inertia of a body is known about an axis passing through the mass center, it may be determined easily about any parallel axis. To prove this statement, consider the two parallel axes, one being an axis through the mass center G and the other a parallel axis through some other point C. The radial distances from the two axes to any element of mass dm are r0 and r, and the separation of the axes is d. Substituting the law of cosines r2= rO
2 +d2+2drOcosq
into the definition for the moment of inertia about the axis through C gives
dmrddmddmr
dmdrdrdmrI
u
OO
OO
q
q
cos2
cos2
22
222

The first integral is the moment of inertia about the mass center axis, the second term is md2 and the third integral equals zero since the u coordinate of the mass center with respect to the axis through G is zero. Thus, the parallel axis theorem is
dmrddmddmr
dmdrdrdmrI
u
OO
OO
q
q
cos2
cos2
22
222
I
2mdII
When the expressions for the radii of gyration are used, the equation becomes
222 dkk

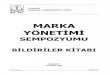
Mass Moments of Inertia of Some Common Geometric Shapes
Solid cylinder (mass m)
Rectangular Prism (mass m)
z
G
y x r
l/2 l/2
l/2
l/2
z
G y
x
y1
y2
b
a
2
2222
2
1
3
1
4
1
12
1
4
1
mrI
mlmrImlmrI
zz
yyxx
)(3
1
3
1
12
1
)(12
1 )(
12
1 )(
12
1
2222
222222
2211lbmImlmbI
bamIlbmIlamI
yyyy
zzyyxx

Sphere (mass m)
Thin circular plate (mass m)
z
G y
x
r
z G
y
x r
2
5
2mrIII zzyyxx
22
2
1
4
1mrImrII zzyyxx

Thin rectangular plate (mass m)
z
G
y
x
t
b
h
)(12
1
12
1
12
1
22
22
hbmI
mbImhI
zz
yyxx
Uniform thin rod (mass m)
z
G
y x
y1
l/2
l/2
0
3
1
12
1 22
11
zz
yyyyxx
I
mlImlII