Embed Size (px)
Citation preview
LABETLow Altitude Balloon
Experiments in Technology
CPR E 491
ENGR 466
Team IntroductionENGR 466 Team
Brian Walker
Richard George
CPR E 491 Team
Mike Svendsen
Steve Towey
Client IntroductionClient
Iowa State University Space Systems and Controls Lab (SSCL)
Advisor
Matthew Nelson
OverviewClient Statement of NeedsFunctional RequirementsNon-Functional RequirementsDeliverablesProject Decomposition into SubsystemsDesign ConceptsTesting and EvaluationWork Plan
Client Statement of NeedThe SSCL has worked on several iterations of its
LABET platform which is a blimp platform used for both research and for outreach events. Currently, all of these have been limited to indoor use only which does limit their functionality for some research based projects. The need is to have an outdoor blimp platform capable of carrying a small payload and able to navigate in calm to light winds
Operating EnvironmentOutdoor usage
Maneuverable in winds up to 10 mph.
Operate in temperatures between -20 and 100 F.
Operate in humidity up to 90%
Functional RequirementsVertical lift capability up to 500 feet
Wireless control/interface up to 1500 feet
Additional payload lift of 7 ounces minimum
System fly time of no less then 20 minutes
Fly and maneuver in up to 10 mph
Balloon lift potential between 80-90% entire system weight
GPS and pressure sensor to determine position
Non-Functional Requirements
Durable and reusable design
Controlled via computer interface
Determine position via computer interface
Project Deliverables Complete balloon system meeting requirements
Operating manuals
Design documentation
Decomposition into Subsystems
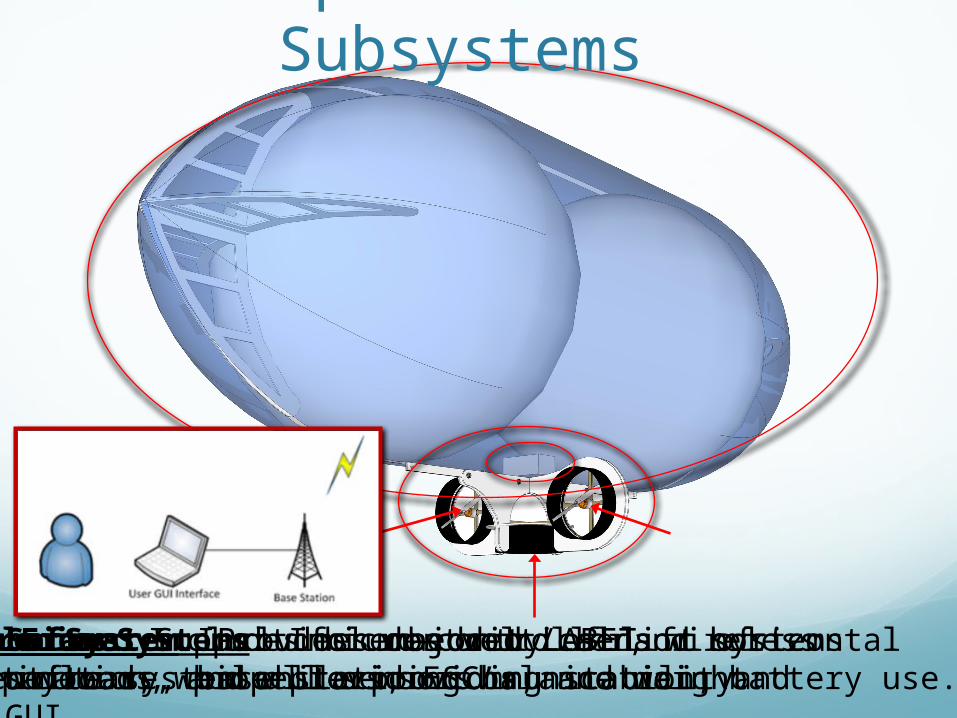
Balloon System: Provides majority of lift of the entire system while providing stability.Load Frame: Support for control / sensor systems and payload, while providing balance weight.Propulsion Systems: Includes vertical and horizontal thrust motors, propellers, ESC’s, and main battery use.Electronics: Includes micro-controller, wireless communication, and all sensors.
Software: Includes embedded LABET software, base station communication, and GUI.
Decomposition into Subsystems
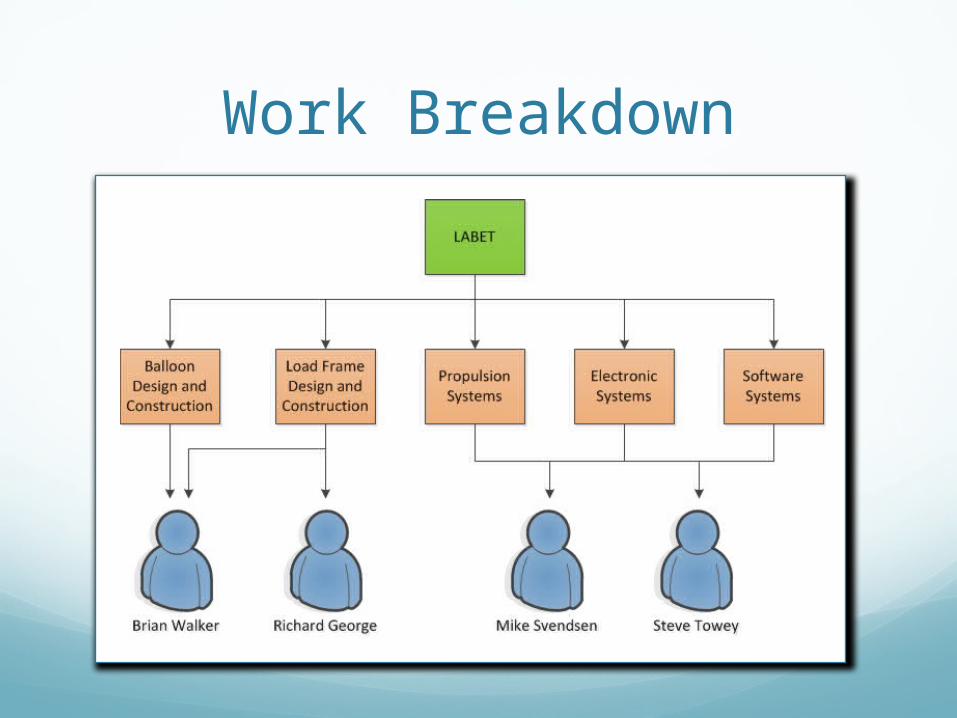
Work Breakdown

Design Concepts
Balloon System Design
Balloon Design BreakdownHybrid Latex Blimp System
Envelope1 mil plastic sheetingSeamed to form the blimp shape
BalloonsTwo individual 48” latex balloonsProvides majority of entire system liftEasily replaced and interchangeable
StiffenersCreates a rigid blimp shape in conjunction with balloonsFoam core creates rigid yet light and inexpensive solution
Weight DistributorFoam core bars Distributes weight of frame to envelope and balloonsSeals envelope shut when connected to frame
Final Design Decisions
AssemblyOpen seam prior to connectionStiffeners assembled inside envelopeBalloons placed and blown inside envelope
Visual PresenceAlternating color tip to determine frontSSCL and LABET symbols for added visual
Benefits Breaks down to manageable sizesEnvelope easily repairedParts interchangeable and replaceable
Load Frame ResearchPrevious LABET SystemsLoad Frame Design
Gen. III – Duel Fan ControlGen. IV – Direct Balloon AttachmentGen. V – Propeller Mounting
Material Usage
Material SelectionWeightStrengthDurabilityCost
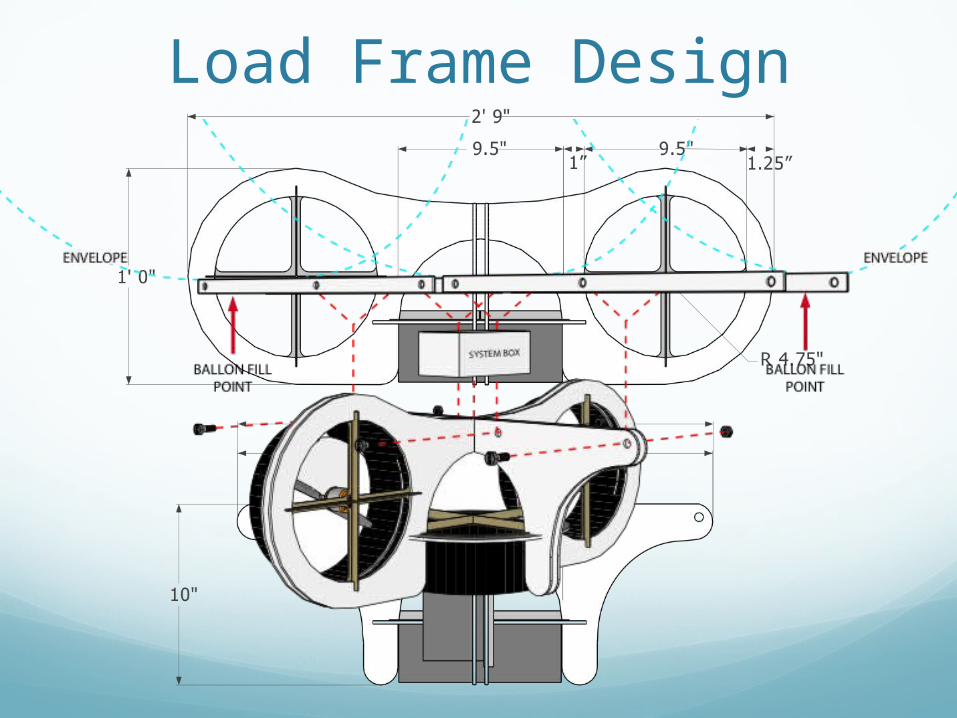
Load Frame Design
Load Frame Design Breakdown
Cross Foam Core Load FrameFoam Core StructureRigid material yet light and inexpensiveCross design to minimize material
Wooden Motor MountsBass wood for rigidness and strengthBuilt in sheer bracing which connects to frame
Propeller ShroudsProtects propellers from interferenceProvides some thrust funneling
System BoxContains/protects battery and circuitsWeight supported by cross structureRemovable/Replaceable to meet payload changes
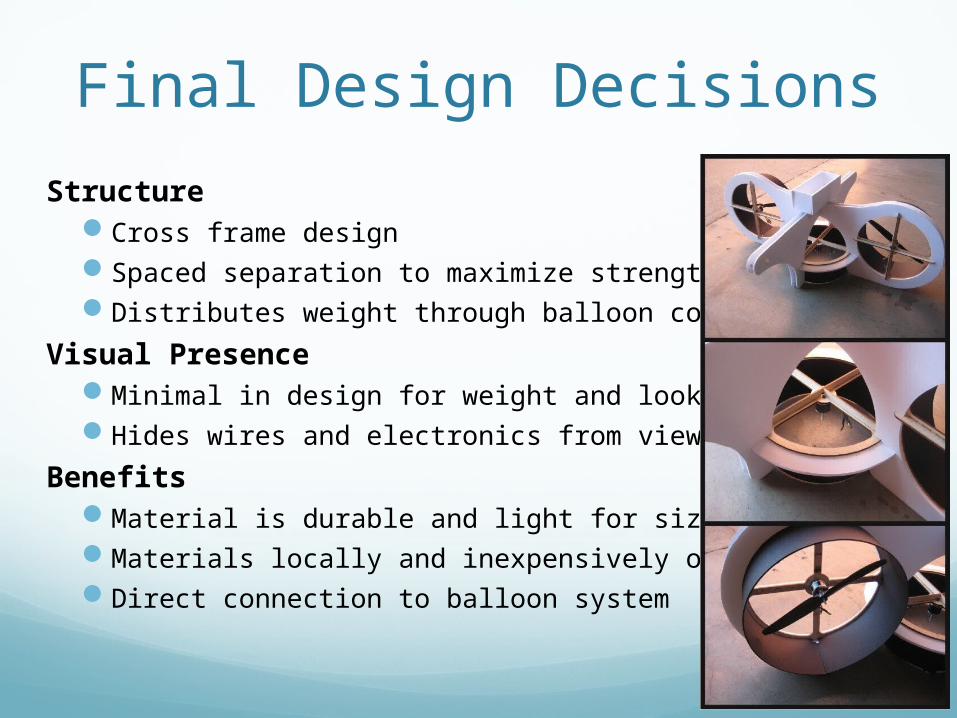
Final Design Decisions
StructureCross frame designSpaced separation to maximize strengthDistributes weight through balloon connection
Visual PresenceMinimal in design for weight and lookHides wires and electronics from view
Benefits Material is durable and light for sizeMaterials locally and inexpensively obtainedDirect connection to balloon system
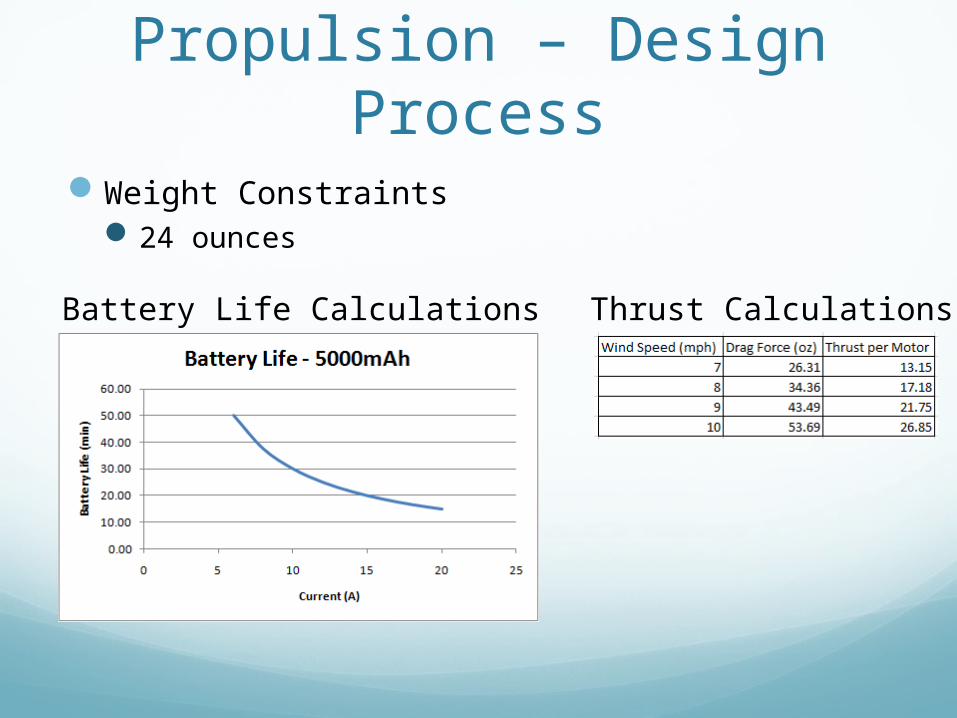
Propulsion – Design Process
Weight Constraints24 ounces
Battery Life Calculations Thrust Calculations
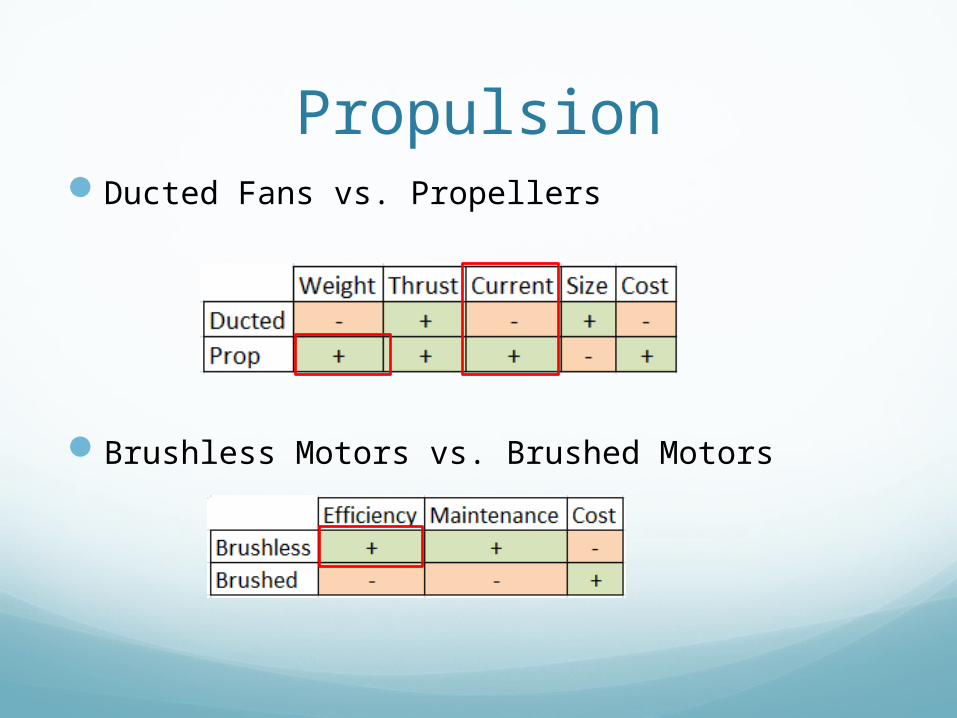
PropulsionDucted Fans vs. Propellers
Brushless Motors vs. Brushed Motors
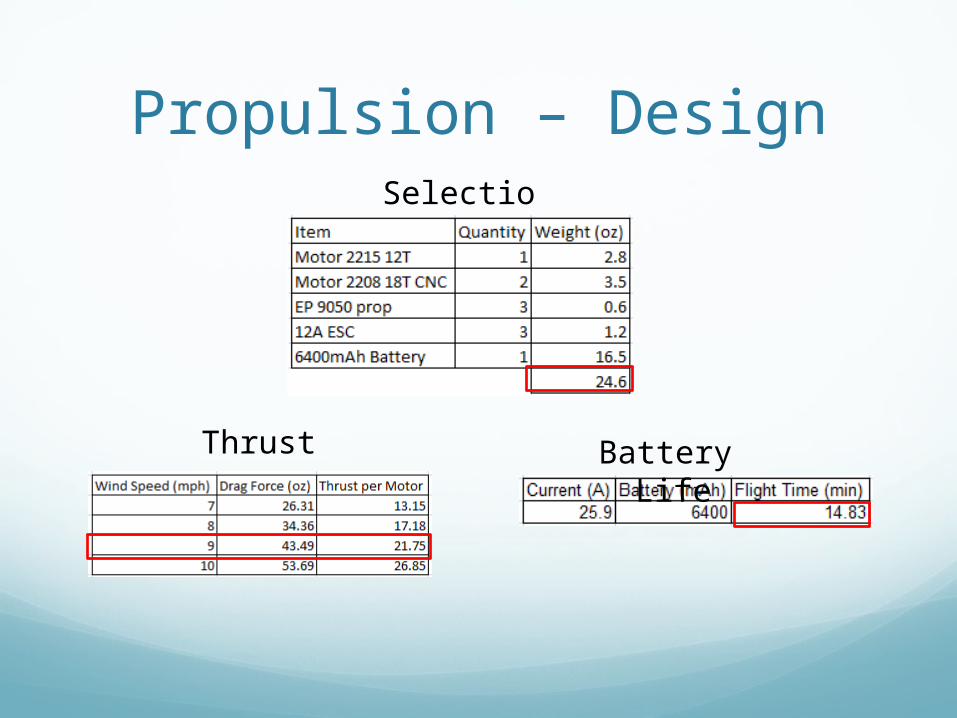
Propulsion – DesignSelection
s
Thrust Battery Life
Electronics – Design Process
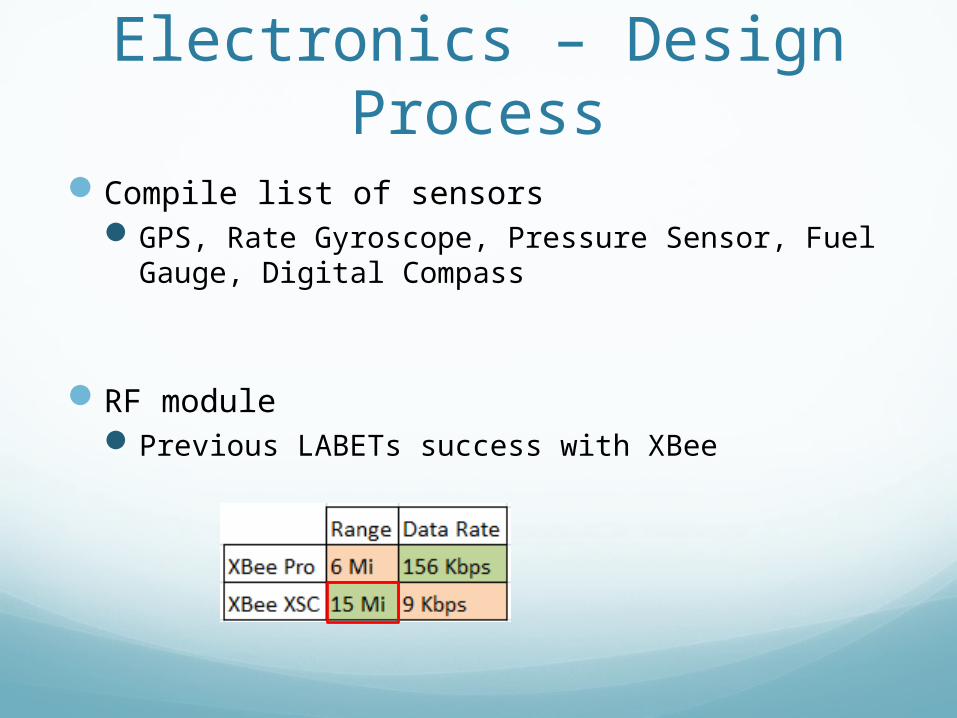
Compile list of sensorsGPS, Rate Gyroscope, Pressure Sensor, Fuel
Gauge, Digital Compass
RF modulePrevious LABETs success with XBee
Electronics – Design Process
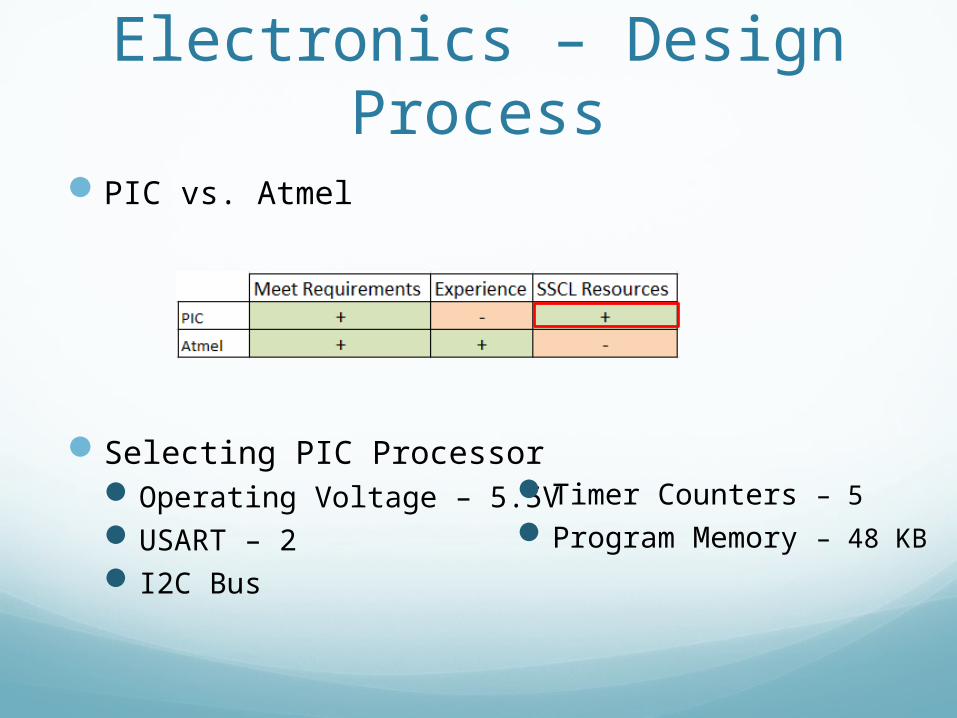
PIC vs. Atmel
Selecting PIC ProcessorOperating Voltage – 5.5VUSART – 2 I2C Bus
Timer Counters – 5 Program Memory – 48 KB
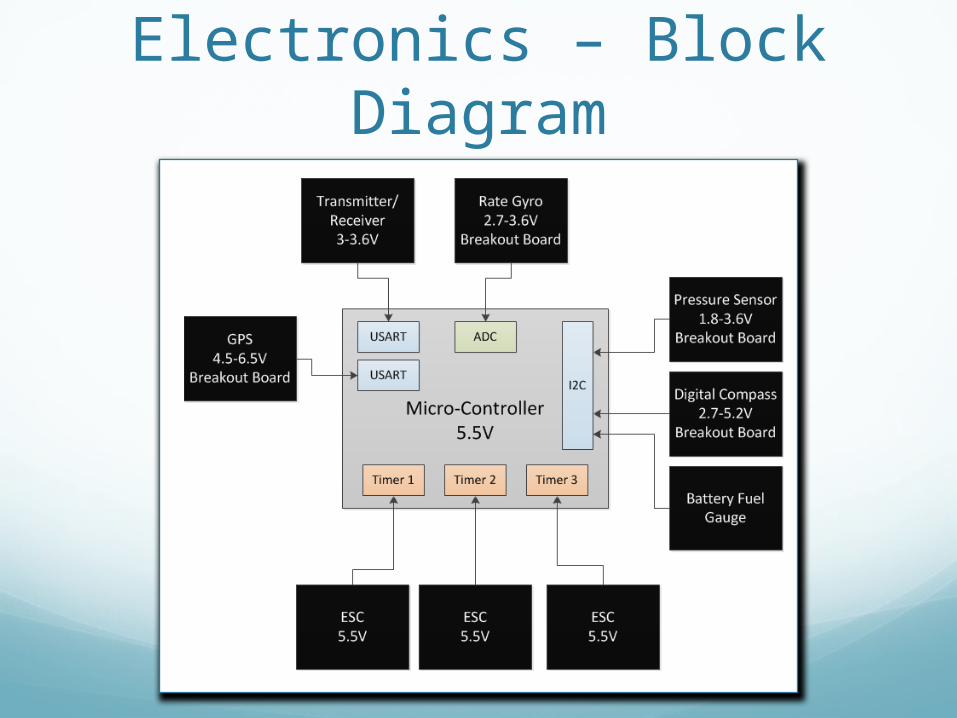
Electronics – Block Diagram
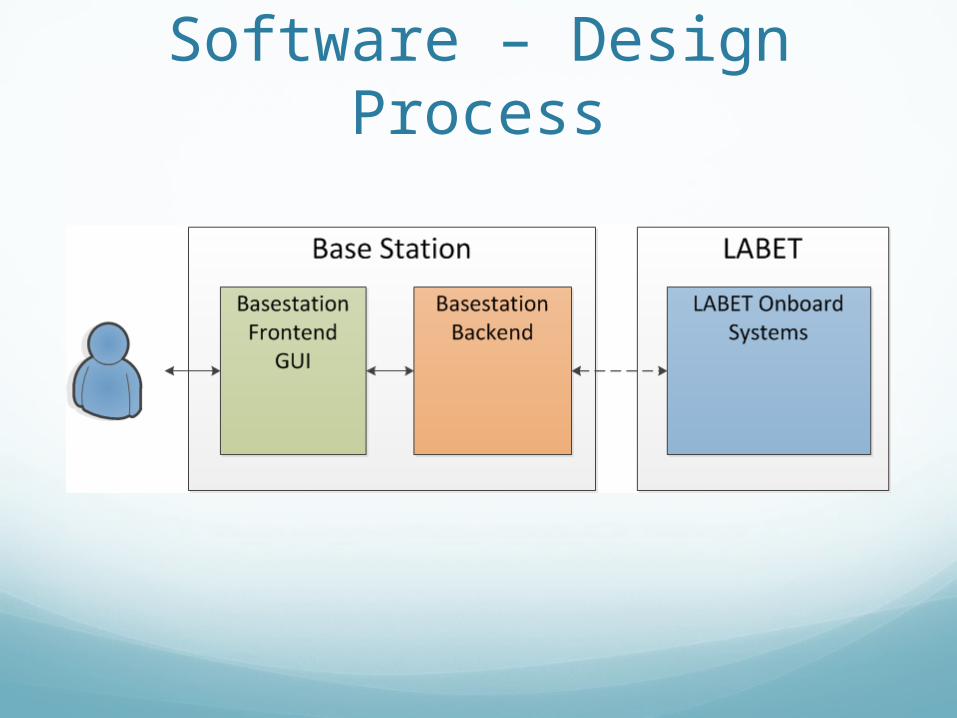
Software – Design Process
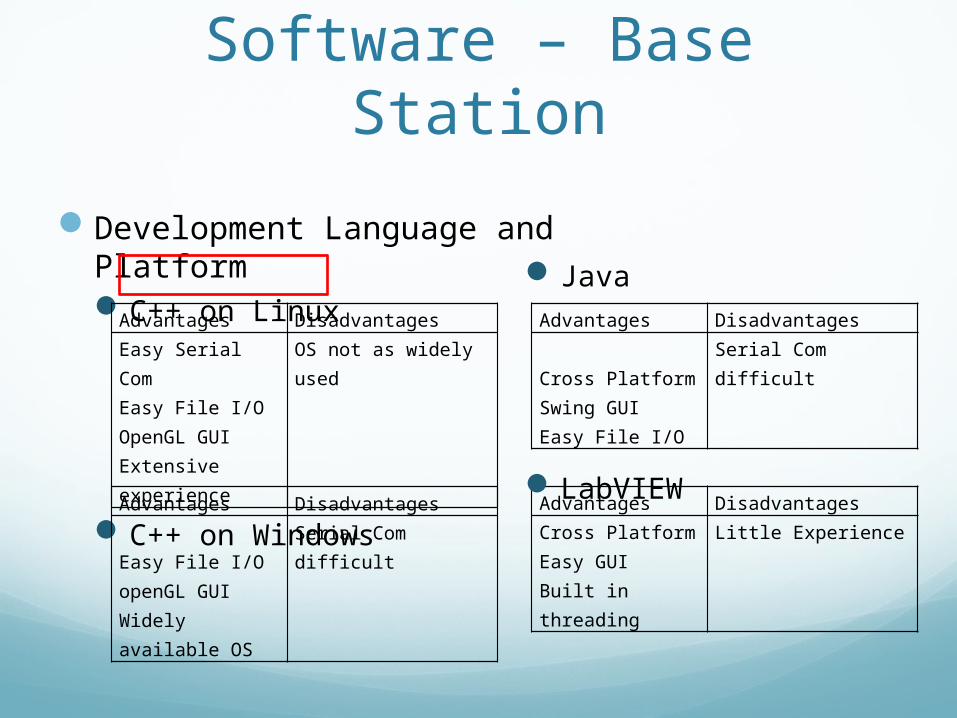
Development Language and PlatformC++ on Linux
C++ on Windows
Software – Base Station
Advantages DisadvantagesEasy Serial Com OS not as widely usedEasy File I/O OpenGL GUI Extensive experience
Advantages DisadvantagesEasy File I/O Serial Com difficultopenGL GUI Widely available OS
Advantages DisadvantagesCross Platform Serial Com difficultSwing GUI Easy File I/O
Advantages DisadvantagesCross Platform Little ExperienceEasy GUI Built in threading
Java
LabVIEW
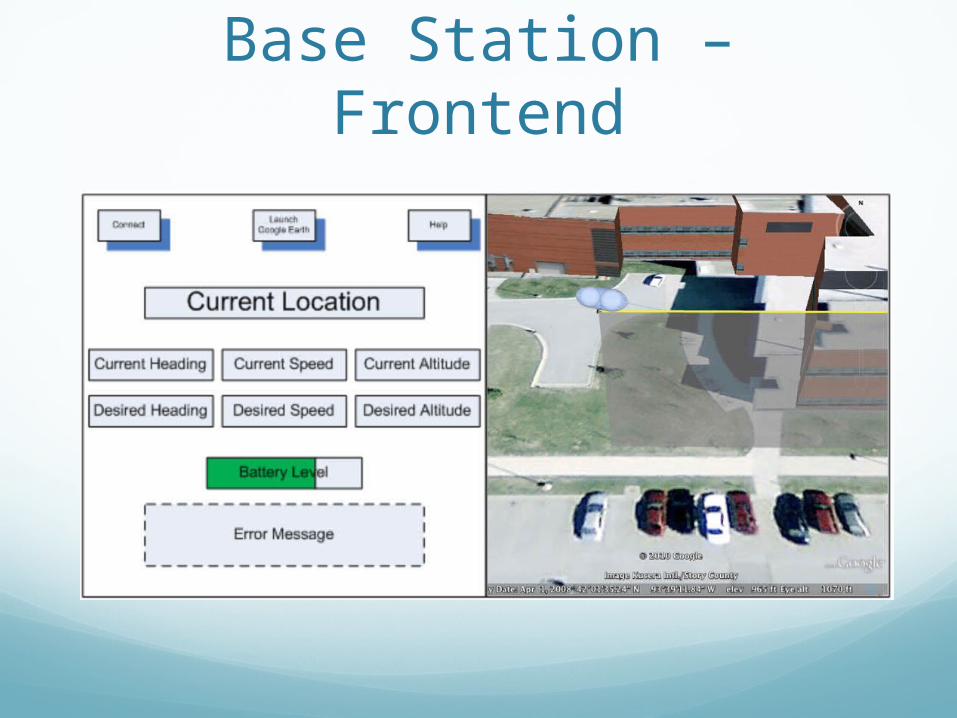
Base Station – Frontend
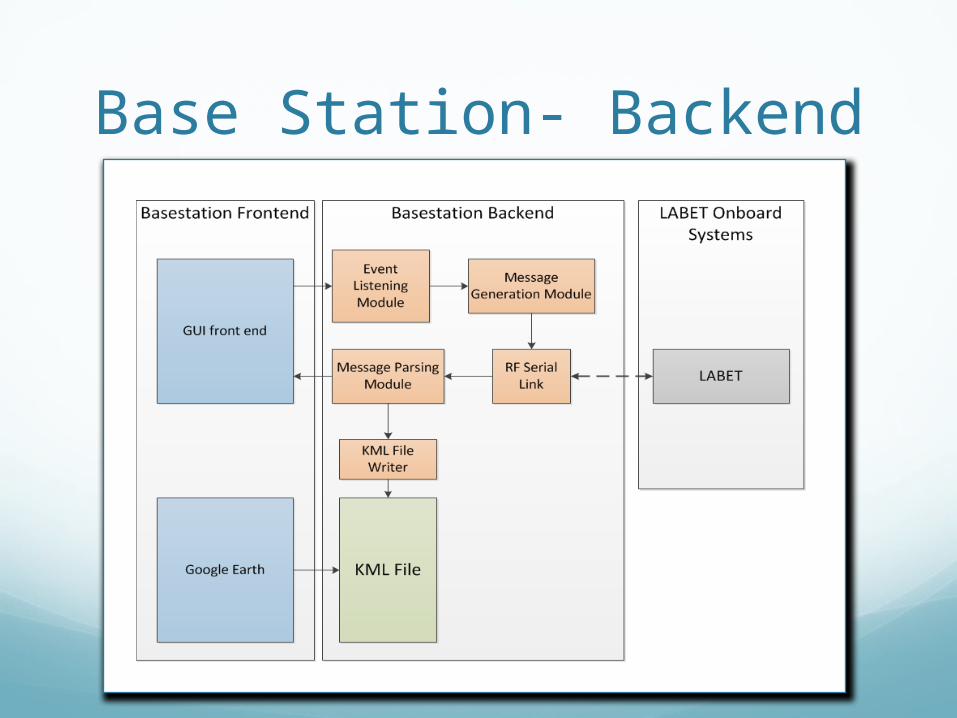
Base Station- Backend
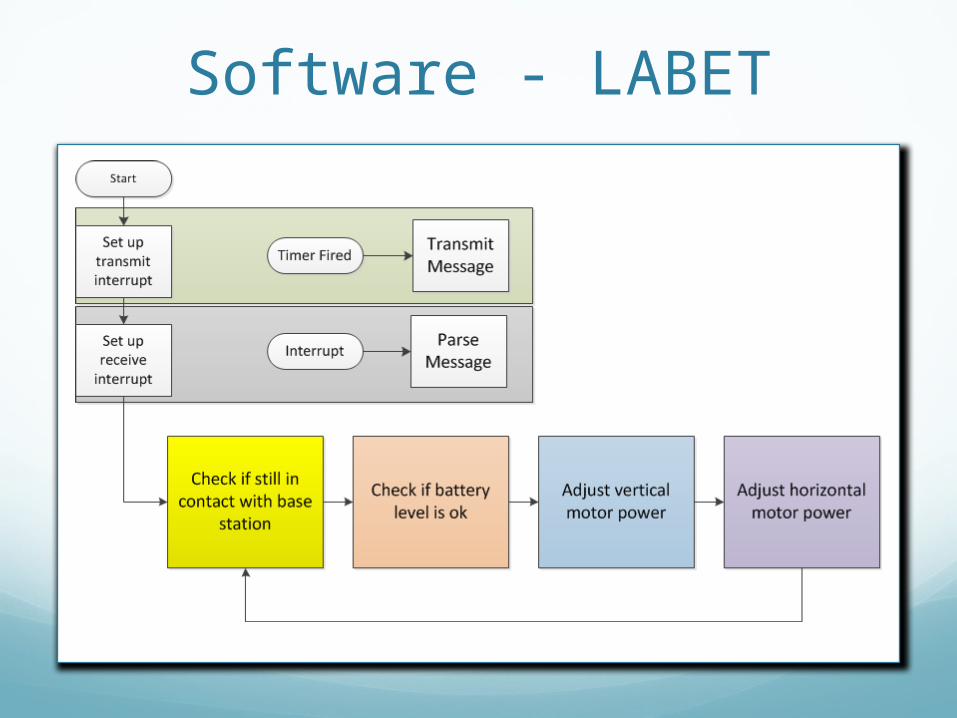
Software - LABET
Structural TestingBalloon System
Seam stress tests
Lift potential test
Assembly/Balloon fill test
Load Frame
Drop test
Motor mount sheer test
Assembly/Balloon fill test
Electronics TestingHardware
Simple test programs
SoftwareCommunication testsGUI interaction testsGround tests
Risks
Hybrid balloon system
Encountering unforeseen setbacks
Little experience with RC equipment
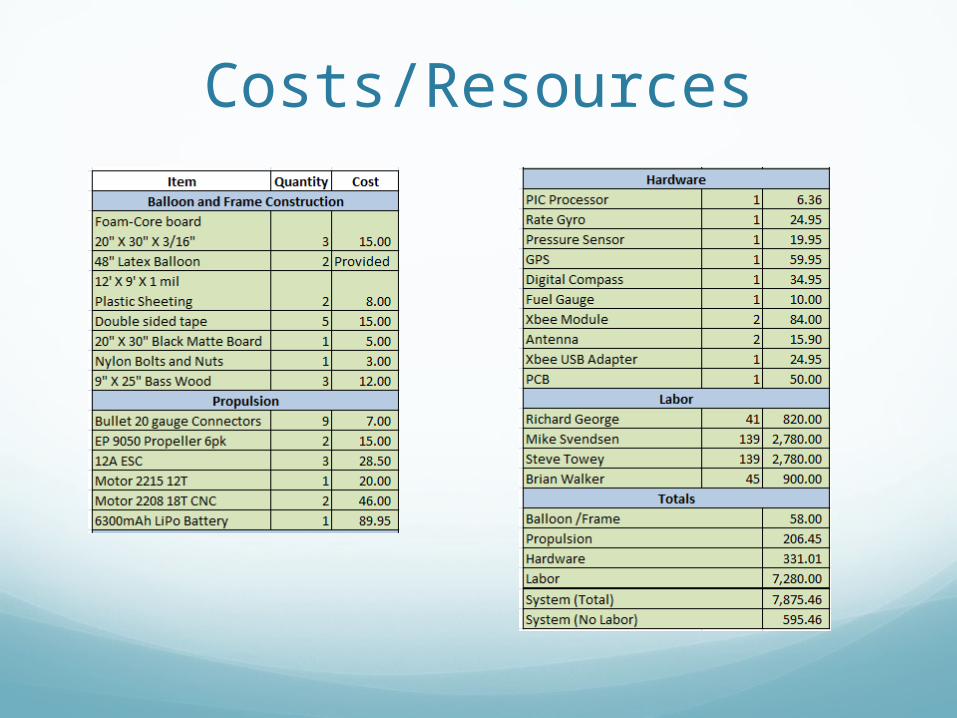
Costs/Resources
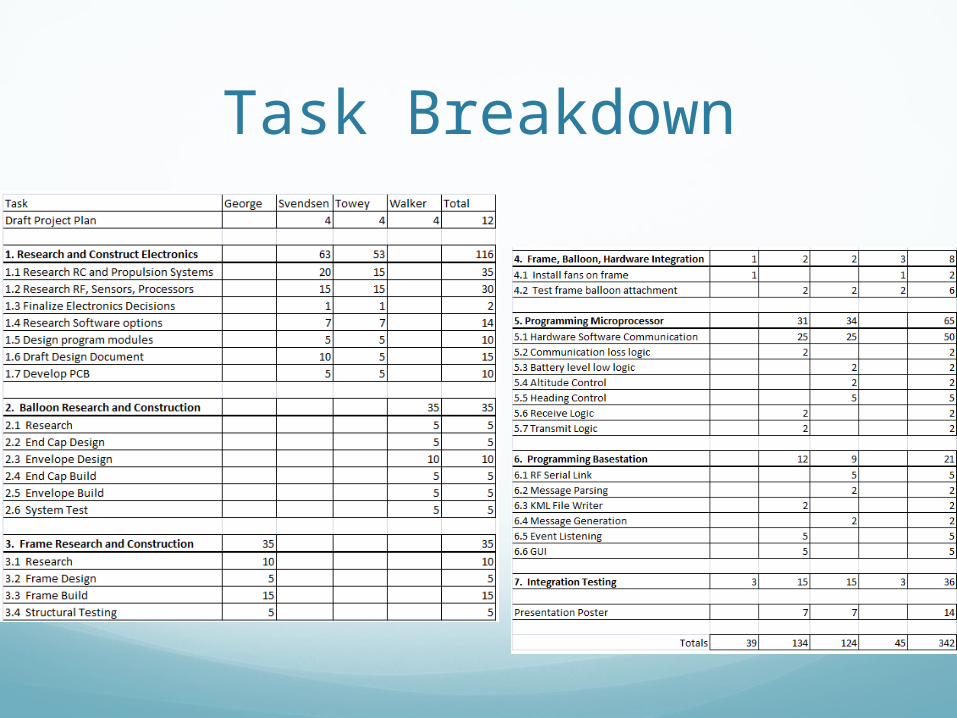
Task Breakdown
Current Status
Load frame complete
Balloon complete
Propulsion system integrated
Electronics selected and ordered
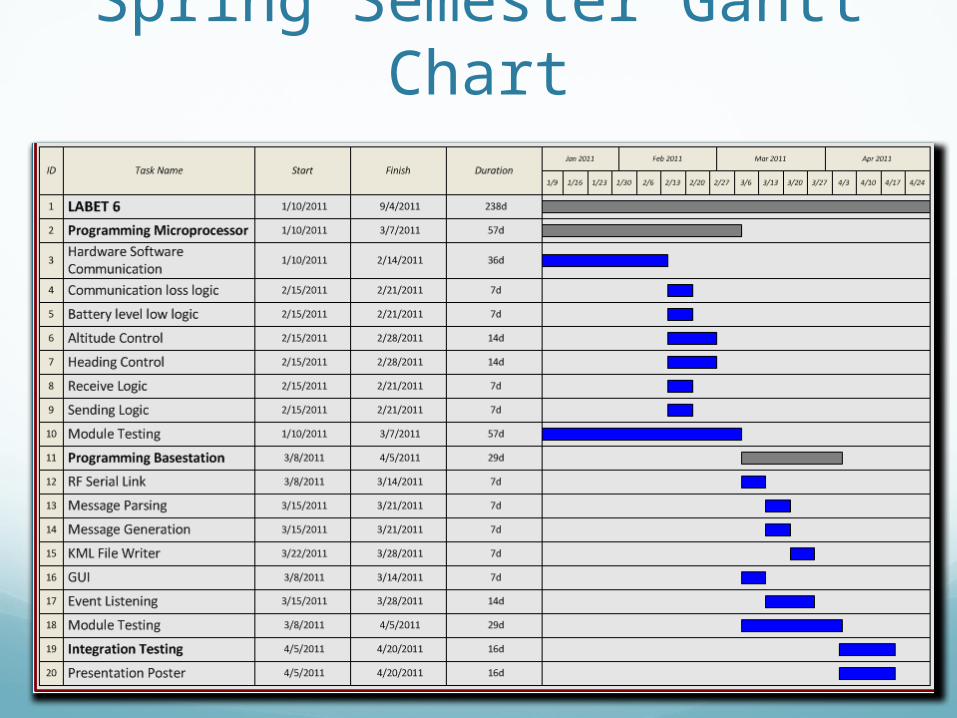
Spring Semester Gantt Chart
Questions





























