Embed Size (px)
Citation preview

Lecture 2: Basics and definitions
Networks as Data Models

y f w x bi ij j ij
m
( )1
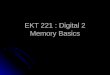
Last lecture: an artificial neuron
Bias: input = 1x0 = 1
x2
x1
xm
y1
yi
w1m
w12
w11
b1

Thus the artificial neuron is defined by the components:
1. A set of inputs, xi.
2. A set of weights, wij.
3. A bias, bi.
4. An activation function, f.
5. Neuron output, y
The subscript i indicates the i-th input or weight.
As the inputs and output are external, the parameters of this model are therefore the weights, bias and activation function and thus DEFINE the model

xn
x1
x2
Input
(visual input)
Output
(Motor output)
More layers means more of the same parameters (and several subscripts)
Hidden layers

Network as a data model
• Can view a network as a model which has a set of parameters associated with it
• Networks transform input data into an output • Transformation is defined by the network
parameters• Parameters set/adapted by optimisation/adaptive
procedure: ‘learning’ (Haykin, 99)• Idea is that given a set of data points network
(model) can be trained so as to generalise …

NNs for function approximation• … that is, network learns a (‘correct’) mapping
from inputs to outputs
• Thus NNs can be seen as being a multivariate non-linear mapping and are often used for function approximation
• 2 main categories: – Classification: given an input say which class it is in – Regression: given an input what is the expected
output

Mapping/function needs to be learnt: various methods available
Learning process used shapes final solution
• Supervised learning: have a teacher, telling you where to go• Unsupervised learning: no teacher, net learns by itself • Reinforcement learning: have a critic, wrong or correct
Type of learning used depends on task at hand. We will deal mainly with supervised and unsupervised learning. Reinforcement learning will be taught in Adaptive Systems course or can be found in eg Haykin or Hertz et al. or
Sutton R.S., and Barto A.G. (1998): Reinforcement learning: an introduction MIT Press
LEARNING: extracting principles from data

Pattern: the opposite of chaos; it is an entity, vaguely defined, that could be given a name or a classification
Examples: • Fingerprints, • Handwritten characters, • Human face, • Speech (or deer/whale/bat etc) signals, • Iris patterns • Medical imaging (various screening procedures) • Remote sensing etc etc etc.
Pattern recognition

Given a pattern:
a. supervised classification (discriminant analysis) in which the input pattern is identified as a member of a predefined class
b. unsupervised classification (e.g. clustering ) in which the patter is assigned to a hitherto unknown class.
Unsupervised methods will be discussed further in future lectures

Eg Handwritten digit classification:
First need a data set to learn from: sets of characters
How are they represented? Eg as an input vector x = (x1, …, xn) to the network (eg vector of ones and zeroes for each pixel according to whether it is black/white).
Set of input vectors is our Training Set X which has already been classified into a’s and b’s (note capitals for set , X, underlined small letters for an instance of set, xi ie the i’th training pattern/vector)
Given a training set X, our goal is to tell if a new image is an a or b ie classify it into one of 2 classes C1 (all a’s) or C2 (all b’s) (in general one of k classes C1.. Ck )
a b

Generalisation
Q. How do we tell if a new unseen image is an a or b?
A. Brute force: have a library of all possible images
But 256 x 256 pixels => 2256 x 256 = 10158,000 images
Impossible! Typically have less than a few thousand images in training set
Therefore, system must be able to classify UNSEEN patterns from the patterns it has seen
I.e. Must be able to generalise from the data in the training set
Intuition: real neural networks do this well, so maybe artificial ones can do the same. As they are also shaped by experiences maybe we’ll also learn about how the brain does it …...

For 2 class classification we want the network output y (a function of the inputs and network parameters) to be:
y(x, w) = 1 if x is an a
y(x, w) = -1 if x is a b
where x is an input vector and the network parameters are grouped as a vector w.
y is known as a discriminant function: it discriminates between 2 classes

As the network mapping is defined by the parameters we must use the data set to perform Learning (training, adaptation) ie:
change weights or interaction between neurons according to the training examples (and possibly prior knowledge of the problem)
Where the purpose of learning is to minimize: training errors on learning data: learning error prediction errors on new, unseen data: generalization error
Since when the errors are minimised, the network discriminates between the 2 classes
We therefore need an error function to measure the network performance based on the training error
An optimisation algorithms can then be used to minimise the learning errors and train the network

Feature ExtractionHowever, if we use all the pixels as inputs we are going to have a long training procedure and a very big network
May want to analyse the data first (pre-process it) and extract some (lower dimensional) salient features to be the inputs to the network
xx*
feature extraction
pattern space(data)
featurespace
Could use the ratio of height and width of letter as b’s will tend to be higher than a’s (Prior knowledge)
Also, scale invariant

Could then make a decision based on this feature. Suppose we make a histogram of the values of x* for the input vectors in the training set X
x*
C1 C2
A
For a new input with an x* value of A we would classify it as C1 as it is more likely to belong to this class

Therefore, get the idea of a Decision Boundary
Points on one side of the boundary are in one class, and on the other are in the other class ie
if x* < d pattern is in C1 else it is in C2
Intuitively it makes sense (and is optimal in a Bayesian sense) to place it where the 2 histograms cross
x*
C1 C2
A
Decision Boundary x* = d

Can then view pattern recognition as the process of assigning patterns to one of a number of classes by dividing up the feature space with decision boundaries, which thus divides the original space
xy
feature extraction
classification
Decision space
pattern space(data)
featurespace

However, can be lots of overlap in this case so could use a rejection threshold e where
if x* < d - e pattern is in C1
if x* > d + e pattern is in C2
else use refer to a better/different classifier
Related to the idea of minimising Risk where it may be more important to not misclassify in one class rather than the other
Especially important in medical applications. Can serve to shift the decision boundary one way or the other based on the Loss function which defines the relative importance/cost of the different errors
x*
C1 C2
A
?

Alternatively can use more features
x
x
xx
x
x1*
x2*
x x
However, cannot keep increasing number of features as there will come a point where the performance starts to degrade as there is not enough data to provide a good estimate (cf using 256 x256 pixels)
Here, use of any one feature leads to significant overlap (imagine projections onto the axes) but use of both gives a good separation

Curse of dimensionality• Geometric eg: suppose we want to approximate a 1d function y
from m-dimensional training data. We could:– divide each dimension into intervals (like histogram)– y value for interval = mean y value of all points in the interval– Increase precision by increasing number of intervals– However, need at least 1 point in each interval– For k intervals in each dimension need > km data points– Thus number of data points grows at least exponentially with
the input dimension• Known as the Curse of Dimensionality:
“A function defined in high dimensional space is likely to be much more complex than a function defined in a lower dimensional space and those complications are harder to discern” (Friedman 95, in Haykin, 99)

Of course, the above is a particularly inefficient way of using data and most NNs are less susceptible
However, only practical way to beat the curse is to incorporate correct prior knowledge
In practice, we must make the underlying function smoother (ie less complex) with increasing input dimensionality
Also try to reduce the input dimension by pre-processing
Mainly, learn to live with the fact that perfect performance is not possible: data in the real world sometimes overlaps. Treat input data as random variables and instead look for a model which has smallest probability of making a mistake

Multivariate regression Type of function approximation: try to approximate a function from a set of (noisy) training data. Eg suppose we have the function:
y = 0.5 +0.4 sin(2x),
We generate training data at equal intervals of x and add a little ransom Gaussian noise with s.d. 0.05.
We add noise since in practical applications data will inevitably be noisy
We then test the model by plugging in many values of x and viewing the resultant function. This gives an idea of the Generalisation peformance of the model

Eg: suppose we have the function: y = 0.5 +0.4 sin(2x),
We generate training data at equal intervals of x (red circles) and add a little random Gaussian noise with s.d. 0.05 and the model The model is trained on this data

This gives an idea of the Generalisation peformance of the model
We then test the model (in this case a piecewise linear model) by plugging in many values of x and viewing the resultant function (solid blue line)

Model Complexity
In the previous picture used a piecwise linear function to approximate the data. Better to use a polynomial y = aixi to approximate the data ie:
y = a0 + a1x 1st order (straight line)
y = a0 + a1x + a2x2 2nd order (quadratic)
y = a0 + a1x + a2x2 + a3x3 3rd order
y = a0 + a1x + a2x2 + a3x3 +… + anxn nth order
As the order (highest power of x) increases, so does the potential complexity of the model/polynomial
This means that it can represent a more complex (non-smooth) function and thus approximate the data more accurately

1st order: model too simple
10th order: more accurate in terms of passing thru data points but is too complex and non-smooth (curvy)
3rd order: models underlying function well

Note though that training error continues to go down as model matches the fine-scale detail of the data (ie the noise)
Rather want to model the intrinsic dimensionality of the data
otherwise get the problem of overfitting
Analagous to the problem of overtraining where a model is trained for too long and models the data too exactly and loses its generality
As the model complexity grows performance improves for a while but starts to degrade sfter reaching an optimal level

Similar problems occur in classification problems: A model with too much flexibility does not genralise well resulting in a non-smooth decision boundary.Somewhat like giving a system enough capacity to ‘remember’ all training point: no need to generalise. Less memory => it must generalise to be able to model training data
Trade-off between being a good fit to the training data and achieving a good generalisation: cf Bias-Variance trade-off (later)