Embed Size (px)
Citation preview

Lecture 3: Dynamic Models• Dynamics of Mechanical Systems
─ Newton’s 2nd lawo (translation)o (rotation)
─ Mass-Spring-Damper Modelo Mass (m)o Spring (spring force )o Damper (damping force )
Spring: stores energyDamper: dissipates energy

Newton’s 2nd Law: Translational Motion
• Newton’s 2nd law governs the relation between acceleration and force• Acceleration is proportional to force, and inversely proportional to mass
where, the vector sum of all forces applied to each body in a
system (N) the vector acceleration of each body w.r.t. an inertial
reference frame (m/sec2) mass of the body (kg)
�⃑� 𝑛𝑒𝑡=∑ 𝐹=𝑚�⃑�
Newton’s 2nd Law: Rotational Motion
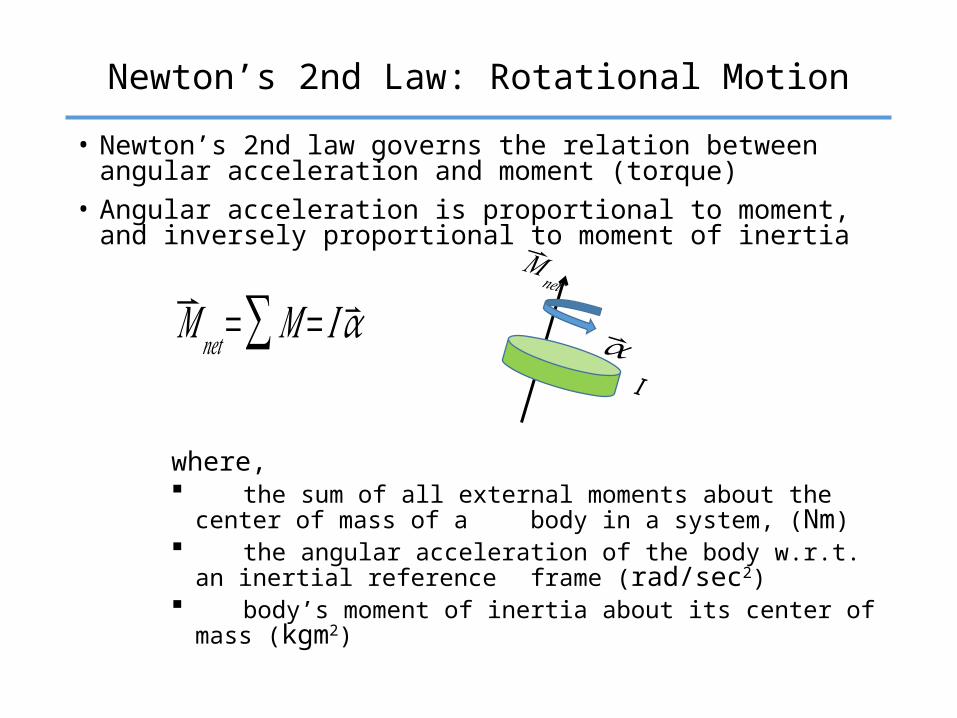
• Newton’s 2nd law governs the relation between angular acceleration and moment (torque)
• Angular acceleration is proportional to moment, and inversely proportional to moment of inertia
where, the sum of all external moments about the center of mass of
a body in a system, (Nm) the angular acceleration of the body w.r.t. an inertial
reference frame (rad/sec2) body’s moment of inertia about its center of mass (kgm2)
�⃑�𝑛𝑒𝑡=∑𝑀= 𝐼 �⃑�I
�⃑�
�⃑�𝑛𝑒𝑡
Moment of Inertia I
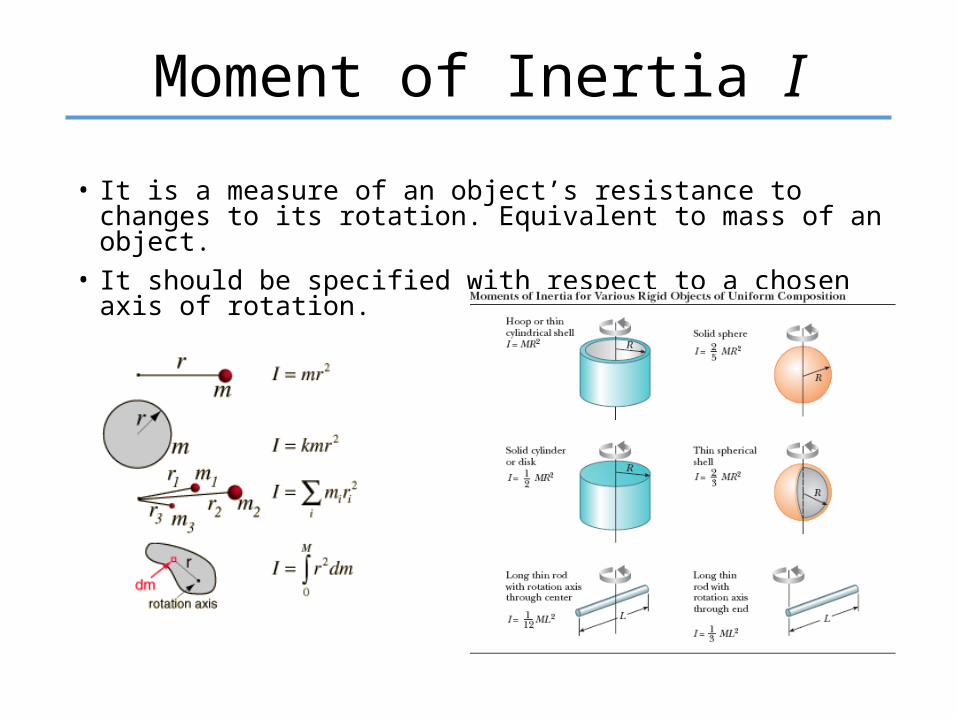
• It is a measure of an object’s resistance to changes to its rotation. Equivalent to mass of an object.
• It should be specified with respect to a chosen axis of rotation.

Moment of Inertia I
• Moment of inertia becomes smaller when mass is concentrated on the axis of rotation

Moment of Inertia I
L
m
L
m
L
m
Lumped mass Distributed mass
Rotation in the middle of bar

Moment of Inertia I
L
m
L
m
L
m
Lumped mass Distributed mass
Rotation in the middle of bar
𝐼=𝑚𝐿2 𝐼=13𝑚𝐿2 𝐼=
112𝑚𝐿2

Spring Model
Two springs in parallel Two springs in series

Spring Model
Two springs in parallel Two springs in series
When , When ,

Spring and Damper Model
m m?
?
Mass Spring Damper System
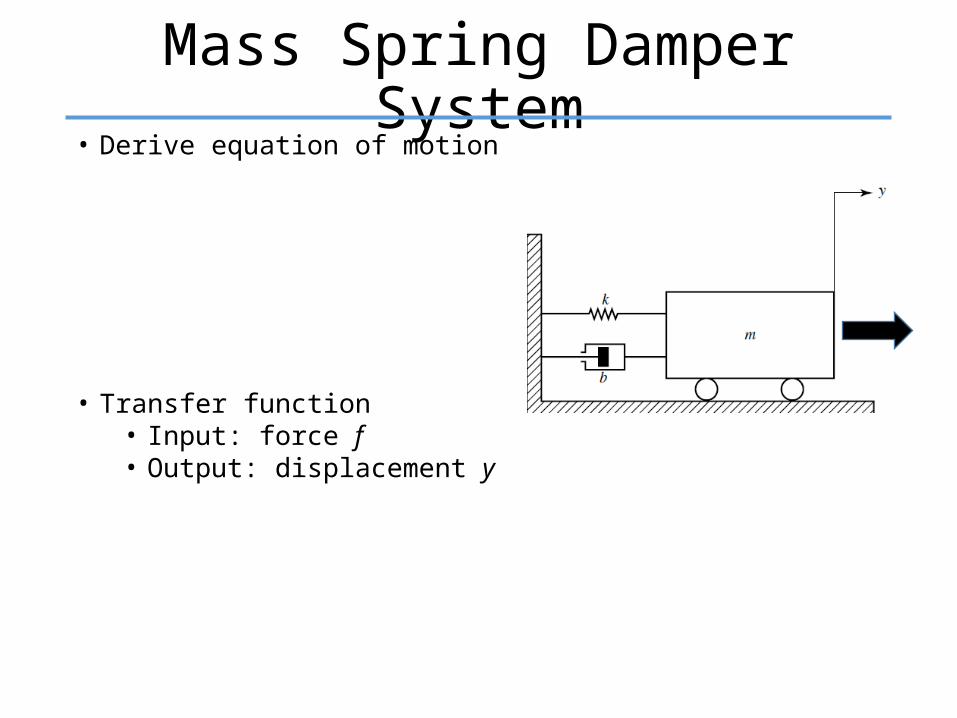
• Derive equation of motion
• Transfer function • Input: force f• Output: displacement y

Mass Spring Damper System
• Applying Newton’s 2nd law,
• Taking the Laplace transform
• Transfer function
(𝑚𝑠2+𝑏𝑠+𝑘 )𝑌 (𝑠 )=𝐹 (𝑠)
𝑚�̈�=−𝑏 �̇�−𝑘𝑦+ 𝑓
𝑚𝑎=∑ 𝐹

MATLAB Simulation: Mass Spring Dashpot System
• Transfer function
• Case study• (underdamped )• (critically damped )• (over damped )
Matlab code:
num = 1den = [1 b 1]sys = tf(num, den)step(sys)
�̈� (𝑡)+2𝜁 𝜔0 �̇�(𝑡)+𝜔02𝑥 (𝑡)=𝑢(𝑡)

MATLAB Simulation: Mass Spring Dashpot System
• Transfer function
• Case study• (underdamped )• (critically damped )• (over damped )
Matlab code:
num = 1den = [1 b 1]sys = tf(num, den)step(sys)
0 5 10 150
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (seconds)
Am
plitu
de
underdamped
critically damped
overdamped
�̈� (𝑡)+2𝜁 𝜔0 �̇�(𝑡)+𝜔02𝑥 (𝑡)=𝑢(𝑡)

MATLAB Simulink: Mass Spring Dashpot System
• Transfer function
• Case study• (underdamped )• (critically damped )• (over damped )
�̈� (𝑡)+2𝜁 𝜔0 �̇�(𝑡)+𝜔02𝑥 (𝑡)=𝑢(𝑡)
0 5 10 150
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (seconds)
Am
plitu
de
underdamped
critically damped
overdamped
Mass Spring Damper System
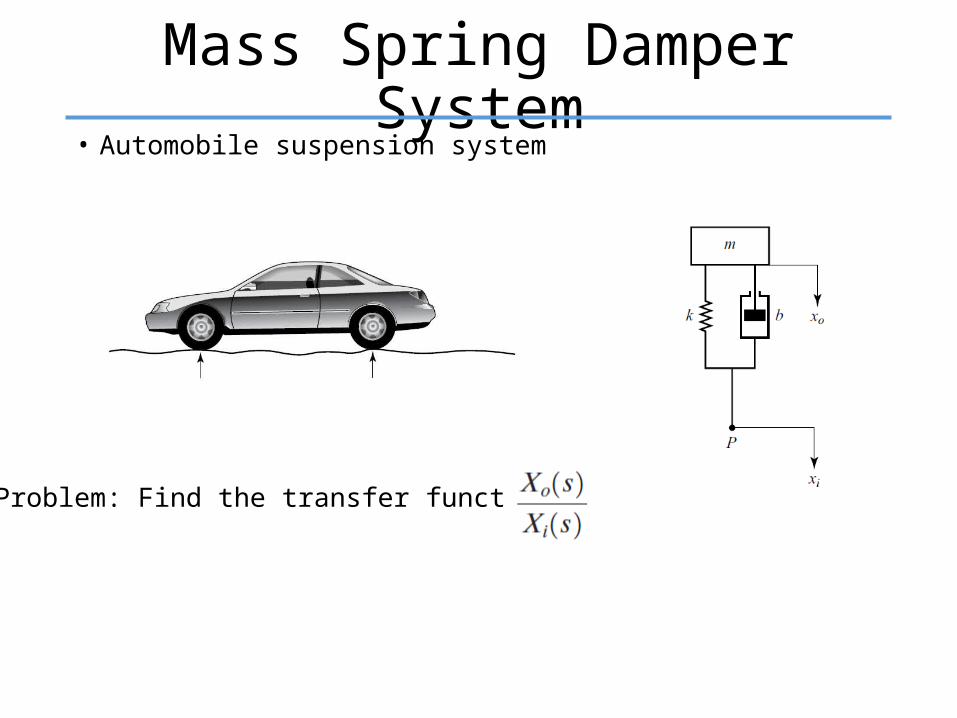
• Automobile suspension system
Problem: Find the transfer function

Mass Spring Damper System
• Automobile suspension system
• The equation of motion for the system
• Taking the Laplace transform
• Transfer function

Cruise Control Model
• Example 2.1─ Write the equations of motion─ Find the transfer function
o Input: force uo Output: velocity
Cruise control model Free-body diagram

Cruise Control Model
• Example 2.1─ Applying Newton’s 2nd law
─ Since
─ Transfer function
Free-body diagram
𝑚𝑎=∑ 𝐹
�̇�+𝑏𝑚𝑣=
𝑢𝑚

Cruise Control Model
• MATLAB Simulation− Transfer function
Parameter values:
Free-body diagram
Matlab code:
num = 1/mden = [1 b/m]sys = tf(num, den)step(sys)
0 20 40 60 80 100 1200
1
2
3
4
5
6
7
8
9
10Step Response
Time (seconds)
Am
plitu
de

Combined Motion: Rotational and Translational Motion
• Inverted pendulum mounted cart− Input: force u−Output:
• Derive equations of motion
Unstable system

Combined Motion: Rotational and Translational Motion
• Position of the center of gravity of the pendulum rod
• Rotational motion of pendulum
Free body diagram

Combined Motion: Rotational and Translational Motion
• Horizontal motion of the center of pendulum
• Vertical motion of the center of gravity of pendulum
• Horizontal motion of cart
Free body diagram

Combined Motion: Rotational and Translational Motion
• For small
Free body diagram

Week 2, Lecture 3: Reading and Practice
Reading for week 2:
- Franklin Textbook Chapter 2, Dynamic Models:- 2.1: Dynamics of Mechanical Systems- 2.2: Models of Electric Circuits
- Modern Control Engineering by K. Ogata- Chapter 3 Mathematical Modeling of Mechanical Systems and
Electrical Systems

















![ACATacat.or.th/download/acat_or_th/journal-4/04 - 04.pdf · APmin APmax Appendix G [1] AP APmax Overpressure Relief Damper Damper 12 Relief Damper Relief Damper (Vent) Fire Damper](https://img.pdfslide.net/doc/110x75/5f7cb481641db55595223717/-04pdf-apmin-apmax-appendix-g-1-ap-apmax-overpressure-relief-damper-damper.jpg)