Embed Size (px)
DESCRIPTION
This is a very useful review of complex numbers
Citation preview

Lecture notes, ME 340©2014-2015 Harry Dankowicz
This document contains transcripts of the online lectures, as well asin-class worksheets for ME 340, Dynamics of Mechanical Systems.
All rights reserved.

lecture notes, me 340 2
Lesson 0 – Mathematical preliminaries
TAKE-AWAYS:
* A linear coordinate transformation transforms a pointwith coordinates (x, y) to a point with coordinates (x0, y0) =
(ax + by, cx + dy) for some numbers a, b, c, and d, and can berepresented in terms of matrix multiplication by
x0
y0
!=
a bc d
!·
xy
!.
* Complex numbers are linear transformations represented bymatrices of the form
r cos q �r sin q
r sin q r cos q
!,
by the corresponding rectangular form r cos q + jr sin q or bythe polar form r · ejj, where the imaginary unit j satisfies thecondition that j · j = �1. A complex number may be describedin terms of its real and imaginary parts r cos q and r sin q, orin terms of its magnitude r and phase j.
* An eigenvalue l of the matrix
a bc d
!
is a real or complex number l that satisfies the characteristicequation �����
a � u bc d � u
����� = 0
in the unknown variable u. The corresponding eigenvector isobtained by solving a system of linear equations.

lecture notes, me 340 3
Online lecture: linear transformations
In a two-dimensional coordinate system, a linear coordinatetransformation1 is a rule that transforms the point with coordinates 1 Bold faced characters are used for
terminology that you should memorize.(x, y) to the point with coordinates
(x0, y0) =�ax + by, cx + dy
�, (1)
given some numbers a, b, c, and d.
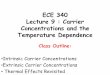
Example 1. The numbers a = 0, b = 1, c = �1, and d = 3 define a co-ordinate transformation that transforms the point (5, 1) to the point (1,�2)and, in general, the point (x, y) to the point (x0, y0) = (y,�x + 3y).
(x, y) = (5, 1)
(x0, y0) = (1,�2)
x � 2y = 3
x0 � y0 = 3Figure 1: The linear coordinate transfor-mation x0 = y, y0 = �x + 3y transformsstraight lines to straight lines.
Points (x, y) on the straight line x � 2y = 3 are transformed to points(x0, y0) on the straight line x0 � y0 = 3.
In terms of the column matrices
xy
!and
x0
y0
!, (2)
the transformation (1) can be written in matrix form as
x0
y0
!=
a bc d
!·
xy
!:=
ax + bycx + dy
!. (3)
We say that the coefficient matrix
a bc d
!(4)
represents the coordinate transformation.

lecture notes, me 340 4
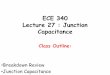
Application of the transformation represented by the matrix in (4)followed by the transformation represented by the matrix
e fg h
!(5)
is equivalent to a transformation represented by the matrix product
e fg h
!·
a bc d
!:=
ea + f c eb + f dga + hc gb + hd
!. (6)
(x, y)
(x0, y0) = (ax + by, cx + dy)
(x00, y00) = (ex0 + f y0, gx0 + hy0)
Figure 2: Successive application oftwo linear coordinate transformationsis represented by the product of thecorresponding matrices.
Example 2. The origin (x, y) = (0, 0) is transformed to itself by everylinear coordinate transformation, since
a bc d
!·
00
!=
00
!. (7)
If ad � bc = 0, other points may be transformed to the origin. For example,with
2 14 2
!, (8)
all points on the straight line y = �2x are transformed to the origin.
The expression �����a bc d
����� := ad � bc (9)
in Example 2 is the determinant of (4). There exist points away fromthe origin that are transformed to the origin only if the determinantequals 0.

lecture notes, me 340 5
If the determinant is nonzero, the inverse of the matrix
a bc d
!(10)
equals
a bc d
!�1
:=
d/(ad � bc) �b/(ad � bc)�c/(ad � bc) a/(ad � bc)
!. (11)
The corresponding transformation reverses the changes to the coordi-nates, since the product
d/(ad � bc) �b/(ad � bc)�c/(ad � bc) a/(ad � bc)
!·
a bc d
!=
1 00 1
!(12)
equals the identity matrix, for which (x0, y0) = (x, y).
In-class worksheet: rotations
A linear coordinate transformation represented by a matrix of theform
cos j � sin j
sin j cos j
!(13)
is a rotation by the angle j. In particular,
(x02 � x01)2 + (y02 � y01)
2
= (x2 cos j � y2 sin j � x1 cos j + y1 sin j)2
+ (x2 sin j + y2 cos j � x1 sin j � y1 cos j)2
= (x2 � x1)2 + (y2 � y1)
2, (14)
i.e., distances between points are unchanged by the transformation.Points on the straight line
x sin q � y cos q = 0 (15)
are transformed to points on the straight line
x0 sin(q + j)� y0 cos(q + j) = 0, (16)
since
cos j sin(q + j)� sin j cos(q + j) = sin q, (17)
sin j sin(q + j) + cos j cos(q + j) = cos q. (18)
Since the origin is transformed to the origin, the distance from eachsuch point to the origin is unchanged by the transformation.

lecture notes, me 340 6
Figure 3: Distances between pointsand to the origin are unchanged by arotation.
Since the determinant of (13) equals cos2 j+ sin2 j = 1, the inverseis the matrix
cos j sin j
� sin j cos j
!=
cos(�j) � sin(�j)
sin(�j) cos(�j)
!, (19)
which corresponds to a rotation by the angle �j.
Exercises
1. Determine the point (x, y) that is transformed to (x0, y0) = (1, 5)under the linear coordinate transformation
(x0, y0) = (4x � y, x + 3y).
2. Determine the coordinate transformation corresponding to
�1 01 1
!.
3. In the same diagram, graph all points that satisfy the straight-linecondition 4x � 3y = 2, as well as the points they transform tounder the linear coordinate transformation
x0 = x + 2y, y0 = 3x � y.
4. Find a linear coordinate transformation that transforms the straightline y = 2x � 1 to the straight line y0 = x0 + 2.
5. Determine the inverse of the matrix
0 �11 0
!.

lecture notes, me 340 7
6. Find the coordinates (x0, y0) such that
x0
y0
!=
4 �13 0
!·
12
!.
7. Find the coordinates (x, y) such that
01
!=
0 �12 1
!·
xy
!.
8. Choose the constant a such that the determinant of the matrix
1 a�2 3
!
equals 0. Find a straight line of points that are all transformed tothe origin by the corresponding transformation.
9. Compute the matrix product
1 10 2
!·
12 00 1
3
!·
1 � 12
0 12
!,
and comment on the value of its n-th power.
•
Solutions
1. With (x0, y0) = (1, 5) it follows that
1 = 4x � y, 5 = x + 3y,
which can be solved to yield (x, y) = (8/13, 19/13).
2. The matrix �1 01 1
!
corresponds to the transformation
x0
y0
!=
�1 01 1
!·
xy
!=
�x
x + y
!.
3. The equationsx0 = x + 2y, y0 = 3x � y
may be solved for x and y to yield
x =17(x0 + 2y0), y =
17(3x0 � y0),

lecture notes, me 340 8
and substitution in the straight-line condition 4x � 3y = 2 thenyields
47(x0 + 2y0)� 3
7(3x0 � y0) = 2
or, in other words,�5x0 + 11y0 = 14.
The two lines are graphed below.
(x, y) = (�1,�2)
(x0, y0) = (�5,�1)
�5x0 + 11y0 = 14
4x � 3y = 2
4. If (x0, y0) are chosen to that y0 = x0 + 2, then the transformation(x0, y0) = (ax + by, cx + dy) implies that cx + dy = ax + by + 2 or(b � d)y = (c � a)x � 2. This describes the straight line y = 2x � 1provided that 2(b � d) = c � a and �(b � d) = �2, for example,a = 0, b = 2, c = 4, d = 0.
5. It follows directly from the definition that
0 �11 0
!�1
=
0 1�1 0
!.
6. Multiplication yields
4 �13 0
!·
12
!=
23
!,
i.e., the point (1, 2) is transformed to the point (2, 3).
7. The equality 01
!=
0 �12 1
!·
xy
!
is equivalent to the system of equations
0 = �y, 1 = 2x + y

lecture notes, me 340 9
or, in other words, x = 1/2 and y = 0. Alternatively,
xy
!=
0 �12 1
!�1
·
01
!=
1/2
0
!.
8. The determinant �����1 a�2 3
����� = 3 + 2a
equals 0 if a = �3/2. In this case,
1 �3/2�2 3
!·
xy
!=
00
!
implies that 2x � 3y = 0.
9. The product equals
1 10 2
!·
12 00 1
3
!·
1 � 12
0 12
!=
12 � 1
120 1
3
!.
Since 1 � 1
20 1
2
!·
1 10 2
!=
1 00 1
!,
it follows that
12 � 1
120 1
3
!n
=
1 10 2
!·
12n 00 1
3n
!·
1 � 12
0 12
!.
Online lecture: complex arithmetic
Complex numbers are linear coordinate transformations.
Example 3. The matrix a 00 a
!(20)
corresponds to the linear transformation (x0, y0) = (ax, ay). Instead of (20),this transformation is expressed in terms of the number a:
x0
y0
!= a ·
xy
!:=
axay
!. (21)
When a = 1, the transformation is the identity.

lecture notes, me 340 10
Example 4. The matrix 0 �11 0
!(22)
corresponds to the linear transformation (x0, y0) = (�y, x). Instead of (22),this transformation is expressed in terms of the imaginary unit j:
x0
y0
!= j ·
xy
!:=
�yx
!. (23)
The transformation (x0, y0) = (�by, bx) can then be expressed in terms ofeither of the products j · b or b · j (or, equivalently, jb or bj).
For numbers a and b, it follows by definition that a · b = ab, sinceapplication of the corresponding transformations in succession yields
a · b ·
xy
!= a ·
bxby
!=
abxaby
!= (ab) ·
xy
!. (24)
Similarly, a · jb = ja · b = j(ab), since
a · jb ·
xy
!= a ·
�bybx
!=
�abyabx
!= j(ab) ·
xy
!. (25)
and
ja · b ·
xy
!= ja ·
bxby
!=
�abyabx
!= j(ab) ·
xy
!. (26)
Finally, ja · jb = �ab, since
ja · jb ·
xy
!= ja
�bybx
!=
�abx�aby
!= (�ab) ·
xy
!. (27)
In particular, j · j = �1, since application of the corresponding trans-formation twice in succession is equivalent to the transformation(x00, y00) = (�y0, x0) = (�x,�y) represented by the matrix product
0 �11 0
!·
0 �11 0
!=
�1 00 �1
!. (28)
Example 5. If matrix addition is defined so that
1 �22 1
!=
1 00 1
!+
0 �22 0
!(29)
then this corresponds to the linear transformation
x0
y0
!=
1 00 1
!·
xy
!+
0 �22 0
!·
xy
!(30)

lecture notes, me 340 11
or, in other words,
x0
y0
!= 1 ·
xy
!+ j2 ·
xy
!= (1 + j2) ·
xy
!. (31)
The application of the transformation twice in succession is equivalent to thetransformation represented by the matrix
1 �22 1
!·
1 �22 1
!=
�3 �44 �3
!(32)
or, equivalently,
(1 + j2) · (1 + j2) = 1 · 1 + 1 · j2 + j2 · 1 + j2 · j2 = �3 + j4, (33)
since j2 · j2 = �4.
A linear transformation represented by a matrix of the form
a �b
b a
!=
a 00 a
!+
0 �b
b 0
!(34)
is a complex number with real part a and imaginary part b. Therectangular form a + jb reduces to the cases in Examples 3 and 4
when a = 0 or b = 0. We define a � jb := a + (�1) · jb = a + j(�b).
Example 6. The complex number corresponding to the matrix
r cos j �r sin j
r sin j r cos j
!(35)
with r > 0 rotates every straight line through the origin by j about theorigin, and stretches the result by r.
j
r rr
q
(r cos q, r sin q)
�rr cos(q + j), rr sin(q + j)
�
Figure 4: The linear coordinate trans-formation in (35) rotates straight linesthrough the origin by j and stretchesthe result by r.

lecture notes, me 340 12
Indeed, the point (x, y) = (r cos q, r sin q) is transformed to the point
x0
y0
!=
r cos j �r sin j
r sin j r cos j
!·
r cos q
r sin q
!
=
rr(cos j cos q � sin j sin q)
rr(sin j cos q + cos j sin q)
!
=
rr cos(j + q)
rr sin(j + q)
!, (36)
where the last equality follows from the trigonometric addition formulae.
The positive factor r and the angle j are the magnitude and phaseof the complex number (35). The rectangular form
r cos j + jr sin j (37)
is expressed in terms of the real and imaginary parts, r cos j andr sin j, respectively. The sum of the squares of the real and imaginaryparts equals the square of the magnitude:
r2 cos2 j + r2 sin2 j = r2. (38)
Example 7. Application of the transformation represented by 1 + j2 fol-lowed by the transformation represented by 1 � j2 is equivalent to a singletransformation represented by
(1 � j2) · (1 + j2) = 1 · 1 + 1 · j2 � j2 · 1 � j2 · j2 = 5. (39)
It follows that application of the transformation represented by 1 + j2 fol-lowed by the transformation represented by 1
5 � j 25 is equivalent to a single
transformation represented by✓
15� j
25
◆· (1 + j2) = 1, (40)
i.e., the identity transformation.
For an arbitrary complex number represented by a matrix
a �b
b a
!(41)
or the rectangular form a + jb, its conjugate a + jb corresponds to thematrix transpose
a �b
b a
!T
=
a b
�b a
!(42)

lecture notes, me 340 13
i.e., a + jb = a � jb. The product of the complex number with itsconjugate equals the square of the magnitude |a + jb|:
(a + jb) ·�a + jb
�= (a + jb) · (a � jb) = a2 + b2. (43)
The inverse 1/(a + jb) corresponds to the matrix inverse
a �b
b a
!�1
=
a/(a2 + b2) b/(a2 + b2)
�b/(a2 + b2) a/(a2 + b2)
!, (44)
i.e.,1
a + jb=
a � jba2 + b2 =
a + jb�a + jb
�· (a + jb)
=a + jb
|a + jb|2 . (45)
In particular, (a + jb) · 1/(a + jb) = 1, i.e., the identity transformation.
Exercises
1. Compute
j2 ·
3�1
!.
2. Show that the transformation corresponding to the imaginary unitj rotates every straight line through the origin counterclockwise by90�.
3. Show that
(a + jb) · (g + jd) = ab � bd + j(ad + bg)
by multiplying the matrices
a �b
b a
!,
g �d
d g
!.
4. Show that(a + jb) · (g + jd) = (g + jd) · (a + jb)
by multiplying the matrices
a �b
b a
!,
g �d
d g
!.
5. Show that(a + jb) · (g + jd) = (a + jb) · (g + jd)
6. Evaluate the product
(2 � j3) · (3 + j2).

lecture notes, me 340 14
7. Evaluate the productj · (1 � j).
8. Show that the complex number 1 � j2 satisfies the quadratic equa-tion
u2 � 2u + 5 = 0.
9. Compute the conjugate of the complex number j3.
10. Compute the magnitude of the complex number �1 + j2.
11. Compute the inverse of the complex number 3 � j.
12. Compute the ratio
1 � jj + 1
:= (1 � j) · 1j + 1
.
13. Determine the magnitude and phase of the complex number
�1 �22 �1
!.
14. Find the rectangular form of the complex number with magnitude3 and phase �p/2.
15. Find the point (x0, y0) transformed from (x, y) = (1, 1) by thecomplex number with magnitude 1/2 and phase p/3.
16. Compute the difference
1j
✓1 � j2 + j2
� 1 + j2 � j2
◆.
•
Solutions
1. By definition
j2 ·
3�1
!=
26
!.
2. Suppose that (x, y) = (r cos q, r sin q) for some q and arbitrary rand let (x0, y0) = (�y, x). Then
(x0, y0) = (�r sin q, r cos q) =�r cos(q + p/2), r sin(q + p/2)
�,
i.e., a 90� counterclockwise rotation, for all r.

lecture notes, me 340 15
3. Here,
a �b
b a
!·
g �d
d g
!=
ag � bd �ad � bg
ad + bg ag � bd
!.
4. Here,
a �b
b a
!·
g �d
d g
!=
ag � bd �ad � bg
ad + bg ag � bd
!
and
g �d
d g
!·
a �b
b a
!=
ag � bd �ad � bg
ad + bg ag � bd
!.
5. Here,(a + jb) · (g + jd) = ag � bd � j(ad + bg),
whereas
(a + jb) · (g + jd) = (a � jb) · (g � jd)
= ag � bd � j(ad + bg).
6. Using the distributive property,
(2 � j3) · (3 + j2) = 2 · 3 + 2 · j2 � j3 · 3 � j3 · j2 = 12 � j5.
7. Using the distributive property
j · (1 � j) = j · 1 � j · j = j + 1.
8. By substitution
(1 � j2) · (1 � j2)� 2(1 � j2) + 5 = 1 � j4 � 4 � 2 + j4 + 5 = 0.
9. Here, j3 = �j3.
10. Here, |� 1+ j2|2 = (�1+ j2) · (�1� j2) = 17, i.e., |� 1+ j2| =p
17.
11. Here, 1/(3 � j) = (3 + j)/10.
12. Here,
(1 � j) · 1j + 1
= (1 � j) · 1 � j2
= �j.
13. Here, r cos q = �1 and r sin q = 2. Squaring these expressionsand adding together gives r2 = 5 ) r =
p5. The unique angle
q 2 [�p, p) then equals p � arccos(1/p
5).

lecture notes, me 340 16
14. With r = 3 and q = �p/2, the rectangular form equals
r cos q + jr sin q = �j3.
15. Since cos p/3 = 1/2 and sin p/3 =p
3/2,
x0
y0
!=
12 cos p
3 � 12 sin p
312 sin p
312 cos p
3
!·
11
!=
1�
p3
41+
p3
4
!.
16. The difference between a complex number and its complex conju-gate equals j2 multiplied by its imaginary part. Since
1 � j2 + j2
=18(1 � j)(2 � j2) = �j
12
,
the imaginary part is �1/2, and the expression equals
1j· j2 ·
✓�1
2
◆= �1.
Online lecture: eigenvectors and eigenvalues
For some linear coordinate transformations, there are straight linesthrough the origin that are transformed to themselves.
Example 8. For the linear transformation defined by the coefficient matrix
2 �1�1 2
!, (46)
points with coordinates (x, y) are transformed to points with coordinates
x0
y0
!=
2 �1�1 2
!·
xy
!=
2x � y�x + 2y
!. (47)
In particular, points (x, y) = (g, g) for any number g are transformedto points (x0, y0) = (g, g). It follows that the straight line y = x istransformed to the straight line y0 = x0.
Similarly, points (x, y) = (g,�g) for any number g are transformedto points (x0, y0) = (3g,�3g). It follows that the straight line y = �x istransformed to the straight line y0 = �x0.
A number l is a real eigenvalue of
a bc d
!(48)

lecture notes, me 340 17
if u = l satisfies the determinant condition�����
a � u bc d � u
����� = (a � u)(d � u)� bc = 0, (49)
known as the characteristic equation. In this case, there exists anonzero column matrix
g
h
!(50)
such that
a bc d
!·
g
h
!=
g
h
!·
l 00 l
!= l ·
g
h
!. (51)
The column matrix (50) is a real eigenvector of (48). Points (x, y) onthe straight line hx � gy = 0 are transformed to points (x0, y0) =
(ax + by, cx + dy) on the same straight line hx0 � gy0 = 0.
Example 9. A real eigenvector of the matrix
2 �1�1 2
!(52)
is a nonzero column matrix g
h
!(53)
such that 2 �1�1 2
!·
g
h
!= l ·
g
h
!(54)
or, in other words,
2 � l �1�1 2 � l
!·
g
h
!=
00
!. (55)
But this can only be possible if the determinant�����
2 � l �1�1 2 � l
����� = (2 � l)(2 � l)� 1 (56)
equals 0, i.e., ifl2 � 4l + 3 = 0, (57)
which is satisfied by the eigenvalues l = 1 and l = 3.For l = 1, (55) is equivalent to the equations
g � h = 0, �g + h = 0 ) h = g, (58)
which implies that every nonzero column matrix of the form
g
g
!(59)

lecture notes, me 340 18
is an eigenvector corresponding to the eigenvalue 1.Similarly, for l = 3, (55) is equivalent to the equations
�g � h = 0, �g � h = 0 ) h = �g, (60)
which implies that every nonzero column matrix of the form
g
�g
!(61)
is an eigenvector corresponding to the eigenvalue 3.
A complex number lR + jlI is a complex eigenvalue of
a bc d
!(62)
if u = lR + jlI satisfies the characteristic equation�����
a � u bc d � u
����� = (a � u)(d � u)� bc = 0. (63)
In this case, there exists a nonzero matrix
gR gIhR hI
!(64)
such that
a bc d
!·
gR gIhR hI
!=
gR gIhR hI
!·
lR lI�lI lR
!. (65)
The expression gR + jgIhR + jhI
!(66)
is the corresponding complex eigenvector.
Example 10. The characteristic equation for the complex number
a �b
b a
!(67)
is(a � u)2 + b2 = 0 (68)
This is satisfied by u = a + jb, since (�jb) · (�jb) = �b2. The equations
agR � bhR = gRa � gI b, (69)
agI � bhI = gRb + gIa (70)
bgR + ahR = hRa � hI b, (71)
bgI + ahI = hRb + hIa (72)

lecture notes, me 340 19
imply that hR = gI and hI = �gR. An example complex eigenvector isobtained with gR = 1 and gI = 0:
1�j
!. (73)
A second eigenvalue and corresponding eigenvector is obtained by substitut-ing �j for j.
A matrix of the form a bc d
!(74)
either has a single real eigenvalue, two real eigenvalues, or a pair ofcomplex eigenvalues that are conjugate to each other.
In-class worksheet: a matrix decomposition
For a linear transformation represented by the matrix
a bc d
!, (75)
there exist angles j and y, and scaling factors rx and ry, such that thetransformation may be represented by the product
cos j � sin j
sin j cos j
!·
rx 00 ry
!·
cos y � sin y
sin y cos y
!, (76)
i.e., as a rotation by y, followed by a scaling of each of the coordi-nates by rx and ry, respectively, followed by a rotation by j. Here,rx < 0 and ry < 0 correspond to reflection about the y and x axis,respectively.
Example 11. Consider the linear coordinate transformation represented bythe matrix
�2 10 �
p3
!. (77)
This equals the product (76) provided that
rx cos j cos y � ry sin j sin y = �2, (78)
�rx cos j sin y � ry sin j cos y = 1, (79)
rx sin j cos y + ry cos j sin y = 0, (80)
�rx sin j sin y + ry cos j cos y = �p
3. (81)
Substitution ofrx =
rxsin j sin y
, ry =ry
sin j sin y(82)

lecture notes, me 340 20
then yields
rx cot j cot y � ry = �2, (83)
�rx cot j � ry cot y = 1, (84)
rx cot y + ry cos j = 0, (85)
�rx + ry cot j cot y = �p
3. (86)
Multiplication of (83) by ry and of (86) by �rx, followed by addition resultsin
r2x � r2
y =p
3rx � 2ry. (87)
Moreover, (84) and (85) imply that
cot j = � rxr2
x � r2y
, cot y =ry
r2x � r2
y. (88)
Finally, multiplication of (83) by �rx and of (86) by ry, followed by addi-tion results in
2rx �p
3ry =⇣
r2y � r2
x
⌘cot j cot y =
rxry
r2x � r2
y=
rxryp3rx � 2ry
(89)
or, in other words,
�2p
3r2x + 8rxry � 2
p3r2
y = 0 ) rx =p
3ry orryp
3(90)
Substitution back into (87) then gives
2r2y = ry or � 2
3r2
y = �ry. (91)
Since rx and ry cannot both equal 0, we obtain two possible solutions:
(rx, ry) =
p3
2,
12
!and (rx, ry) =
p3
2,
32
!. (92)
In the former case, cot j = �p
3 and cot y = 1, which imply that j =
�p/6 + np and y = p/4 + mp, for arbitrary integers n and m and,consequently, rx = �(�1)m+np6 and ry = �(�1)m+n
p2. In the latter
case, cot j = 1/p
3 and cot y = �1, which imply that j = p/3 + np
and y = �p/4 + mp, for arbitrary integers n and m and, consequently,rx = �(�1)m+n
p2 and ry = �(�1)m+np6.
The angles j and y, as well as the scaling factors rx and ry may beobtained from the real eigenvalues and eigenvectors of
a bc d
!·
a cb d
!and
a cb d
!·
a bc d
!. (93)

lecture notes, me 340 21
In both cases, the eigenvalues equal r2x and r2
y. The correspondingeigenvectors are multiples of
cos j
sin j
!,
� sin j
cos j
!(94)
and � cos y
sin y
!,
sin y
cos y
!, (95)
respectively.
Example 12. In the case of the linear transformation represented by
�2 10 �
p3
!, (96)
the eigenvalues of
�2 10 �
p3
!·
�2 01 �
p3
!=
5 �
p3
�p
3 3
!(97)
are l1 = 6 and l2 = 2 with corresponding eigenvectors
�p
3h
h
!(98)
and gp3g
!, (99)
respectively. Here,
cos j = �p
3h, sin j = h ) j = �p
6+ np (100)
for some integer n.Similarly, the eigenvalues of
�2 01 �
p3
!·
�2 10 �
p3
!=
4 �22 4
!(101)
are l1 = 6 and l2 = 2 with corresponding eigenvectors
�h
h
!(102)
and g
g
!, (103)
respectively. Here,
sin y = g, cos y = g ) y =p
4+ mp (104)

lecture notes, me 340 22
for some integer m.We select m and n, and then choose rx and ry from the positive and
negative square roots of l1 and l2, respectively, so that (76) holds. Forexample, with m = n = 0, the values rx = �
p6 and ry = �
p2 imply that
the coordinate transformation is equivalent to a rotation by p/4, followed bya scaling and sign change of the x coordinate by
p6 and of the y coordinate
byp
2, followed by a rotation by �p/6.
Figure 5: The coordinate transformationcan be reduced to a rotation, followedby scaling of each of the coordinates,followed by a rotation.
Exercises
1. Find the characteristic equation for the matrix
0 31 �1
!.
2. Compute all eigenvalues of the matrix
2 3/20 �1
!.
3. Verify that 10
!

lecture notes, me 340 23
is a real eigenvector of
�1 5/20 4
!.
4. Find a complex eigenvector of the matrix
5 �25 �1
!.
5. Show that the matrix 1 1�1 3
!
only has one real eigenvalue and no complex eigenvalues. What isthe corresponding eigenvector?
6. Given a matrix G DF Y
!
whose entries are arbitrary expressions, a (formal) eigenvector is anonzero column matrix of expressions
s
t
!
such that
G DF Y
!·
s
t
!:=
G · s + D · t
F · s + Y · t
!
equals
l ·
s
t
!:=
l · s
l · t
!
for some expression l, known as the corresponding (formal)eigenvalue, that is a formal solution to the characteristic equation
�����G � l D
F Y � l
����� := (G � l) · (Y � l)� F · D = 0.
Assume that lR + jlI is a complex eigenvalue of
a bc d
!
with corresponding complex eigenvector
gR + jgIhR + jhI
!.
Show that (64) is a formal eigenvector of (62) with formal eigen-value lR + jlI .

lecture notes, me 340 24
7. Find a straight line y = kx that is transformed to itself under thetransformation given by the matrix
10 �424 �10
!.
•
Solutions
1. The characteristic equation equals�����
0 � u 31 �1 � u
����� = 0 ) u2 + u � 3 = 0.
2. The characteristic equation equals u2 � u � 2 = 0. Since
au2 + bu + c = 0 ) u =�b ±
pb2 � 4ac
2a,
it follows that the eigenvalues equal
1 ±p
92
= 2 and � 1.
3. The claim follows since
�1 5/20 4
!·
10
!=
�10
!= �1 ·
10
!.
4. The characteristic equation equals u2 � 4u+ 5 = 0. The eigenvaluesequal
4 ±p�4
2= 2 ± j.
With lR = 2 and lI = 1,
5 �25 �1
!·
gR gIhR hI
!=
gR gIhR hI
!·
2 1�1 2
!
implies that
3gR + gI � 2hR = 0, �gR + 3gI � 2hI = 0,
5gR � 3hR + hI = 0, 5gI � hR � 3hI = 0
or, in other words,
hR =32
gR +12
gI , hI = �12
gR +32
gI .
The choice gR = 3 and gI = 1 gives the complex eigenvector
3 + j5
!.

lecture notes, me 340 25
5. The characteristic equation is u2 � 4u + 4 = (u � 2)2 = 0, so theonly eigenvalue is l = 2. Then
g + h = 2g, �g + 3h = 2h ) h = g
implies that a corresponding eigenvector is
g
g
!
for any g 6= 0.
6. By definition, lR + jlI is a solution to the characteristic equation.Moreover,
a bc d
!·
gR + jgIhR + jhI
!
equals
a bc d
!·
gRhR
!+ j ·
a bc d
!·
gIhI
!.
Similarly,
(lR + jlI) ·
gR + jgIhR + jhI
!
equals
gR gIhR hI
!·
lR�lI
!+ j ·
gR gIhR hI
!·
lIlR
!.
But these must be equal according to (65).
7. The characteristic equation is u2 � 4 = 0, so there are two realeigenvalues l = 2 and �2. An eigenvector
g
h
!
with g 6= 0 corresponding to the first eigenvalue must satisfy theequations
10g � 4h = 2g, 24g � 10h = 2h ) h = 2g.
In particular, any point (x, y) on the straight line y = hx/g = 2x istransformed to
x0
y0
!=
10 �424 �10
!·
x2x
!=
2x4x
!,
i.e., points on the same straight line y0 = 2x0.

lecture notes, me 340 26
Online lecture: complex exponentials
Suppose that r and q are two numbers and define the complex expo-nential
er+jq := er cos q + jer sin q = er · ejq . (105)
This is clearly a complex number with magnitude er and phase q.The complex number ejq may be represented graphically by a point
on the unit circle in the complex plane with coordinates (cos q, sin q).In particular, ejp/2 = j, ejp = �1, ej3p/2 = �j, and ej2p = 1. Moreover,
ejq · ejj = ej(q+j). (106)
<
=
�1
1
�1 1
q
cos q
sin q
ejq
Figure 6: Euler’s formula ejq =cos q + j sin q implies that the complexexponential ejq is a point on the unit cir-cle in the complex plane with coordinatesgiven by the real and imaginary parts.
Example 13. For the complex number 2 · ejp/3 = 2 cos(p/3)+ j2 sin(p/3)with magnitude 2 and phase p/3, the inverse is given by
12 · ejp/3 =
2 cos(p/3)� j2 sin(p/3)4
=e�jp/3
2. (107)
The product
2 · ejp/3 · e�jp/3
2= 1 (108)
is the identity transformation.
If r(t) and q(t) are some functions of t,
ddt
er(t)+jq(t) =
✓dr(t)
dt+ j
dq(t)dt
◆· er(t)+jq(t). (109)
Example 14. With r(t) = 0 and q(t) = wt, we obtain
12·�ejwt + e�jwt� = cos wt. (110)

lecture notes, me 340 27
Differentiation on both sides with respect to t yieldsjw2
·�ejwt � e�jwt� = �w sin wt, (111)
which is easily verified by substitution.
Sinceddt
e(a+jb)t = (a + jb) · e(a+jb)t (112)
for constants a and b, it follows thatZ t
e(a+jb)t dt =e(a+jb)t
a + jb. (113)
Example 15. The definite integralZ p/2w
0
ejwt + e�jwt
2dt =
ejwt � e�jwt
j2w
����p/2w
0=
1w
, (114)
which also results from integrating cos wt over the interval [0, p/2w].
Exercises
1. Write the complex exponential e2+jp/3 in rectangular form.
2. Determine the magnitude of the complex exponential �ejp/4.
3. Write the complex number 3 � j2 in polar form r · ejq .
4. Compute the conjugate of the complex number 3 · e�j3p/4.
5. Compute the ratio of the complex numbers 3 � j and ejp/3/2.
6. Compute the magnitude of the ratio
2 · e�jp/2
ej2p/7 .
7. Find the polar form of the inverse of the complex numberp
3 + j.
8. Compute the derivative with respect to t of the complex exponen-tial et�jt2 .
9. Evaluate the product
e�jpt/2 · ddt
ejpt/2.
10. Verify that u(t) = C · ejwt satisfies the differential equation
d2u(t)dt2 + w2 · u(t) = 0
for any constant C.
11. Graph the real part of the function e(�1/2+j)t.
•

lecture notes, me 340 28
Solutions
1. Here, r = e2 and q = p/3. The rectangular form is
e2 cosp
3+ je2 sin
p
3=
12
e2 + jp
32
e2.
2. Since �1 = ejp ,
�ej p4 = �1 · ej p
4 = ejp · ej p4 = ej 5p
4 ,
whose magnitude equals 1.
3. With r cos q = 3 and r sin q = �2, we find r =p
32 + 22 =p
13and q = � arcsin (2/
p13). The polar form is
p13 · e�j arcsin 2p
13 .
4. Since cos(�q) = cos q and sin(�q) = � sin q, the conjugate ofejq = cos q + j sin q is e�jq = cos q � j sin q. It follows that
3 · e�j 3p4 = 3 · ej 3p
4 .
5. Since
3 � j =p
10 · e�j arcsin 1p10 ,
it follows that
3 � jej p
3 /2=
p10 · e�j arcsin 1p
10 · 2 · e�j p3 = 2
p10 · e�j
�p3 +arcsin 1p
10
�.
6. Sincer · ejq
h · ejj =r
h· ej(q�j),
the magnitude of the ratio
2e�jp/2
ej2p/7
is 2.
7. Since p3 + j = 2 · ej p
6 ,
the inverse equals12· e�j p
6 .
8. Here,ddt
et�jt2= (1 � j2t) · et�jt2
.

lecture notes, me 340 29
9. Here,
e�j pt2 · d
dtej pt
2 = e�j pt2 · j
p
2· ej pt
2 = e�j pt2 · p
2· ej p
2 · ej pt2 =
p
2· ej p
2
or, in other words,jp
2.
10. Sinceddt
C · ejwt = C · jw · ejwt,
it follows that
d2
dt2 C · ejwt = C · (jw) · (jw) · ejwt = �Cw2 · ejwt = �w2 · u(t).
11. The real part of the function e(�1/2+j)t is e�t/2 cos t whose graph isshown below.
t
1
p 2p
e�t/2 cos t

lecture notes, me 340 30
Lesson 1 – Dynamic systems and modeling
TAKE-AWAYS:
* A dynamic system consists of components with inputs andoutputs. Examples are amplifiers, delay lines, and integrators.
* Harmonic signals are given by
A cos(wt � q)
in terms of an amplitude A, an angular frequency w, and aphase shift q. An expression of the form a cos wt + b sin wtcorresponds to a harmonic signal with
A =p
a2 + b2
andcos q =
apa2 + b2
, sin q =bp
a2 + b2.
* Physical systems using electronic, mechanical, or fluid com-ponents may be modeled as dynamic systems, and designedto output approximately the integral or derivative of a har-monic input.

lecture notes, me 340 31
Online lecture: components and harmonic signals
In these notes, a dynamic(al) system is a collection of physicalcomponents that modify or generate signals. A signal is a functionof time, denoted by t. The notation i(t) identifies the signal i as atime-dependent function. We sometimes omit the (t), when possibletime-dependence can be inferred from the context.
controller plant
disturbance
•u(t)
sensor
r(t) + e(t) o(t)
�y(t)
Figure 7: A block representation ofa dynamic system in the presence ofexternal disturbances, in which theoutput o(t) of the plant is controlled bya signal u(t), generated by a controller,whose input e(t) is the differencebetween a reference signal r(t) and theoutput y(t) of a sensor.
Each component of a system may have one or several inputs,which receive the (input) signals i1(t), i2(t), . . ., and one or severaloutputs, which return the (output) signals o1(t), o2(t), . . ..
i1(t)
i2(t)
i3(t)
o1(t)
o2(t)
Figure 8: A block representation of acomponent of a dynamic system withthree inputs and two outputs.
We refer to single-input-single-output components or systemsusing the acronym SISO. We use the acronym MIMO for multi-input-multi-output components or systems.
Example 16. An amplifier is a SISO component that increases the signalstrength by a given positive factor, known as the (amplifier) gain.
Ki(t) o(t) Figure 9: A block representation of an
amplifier with gain K.
If the gain is denoted by K, then the value of the output o at time t equalsthe value of the input i at time t multiplied by K. If the input signal i(t)received by an amplifier equals e�t sin t and the gain equals 5 then theoutput signal o(t) returned by the component equals 5i(t) = 5e�t sin t.

lecture notes, me 340 32
Example 17. A delay line is a SISO component that delays a signal intime by a given positive amount, known as the (time) delay.
i(t) o(t)D Figure 10: A block representation of adelay line with delay D.
If the delay is denoted by D, then the value of the output o at time tequals the value of the input i at time t � D. If i(t) = e�t sin t and D = 1,then o(t) = i(t � 1) = e�(t�1) sin(t � 1).
Example 18. An integrator is a SISO component that integrates a signalwith respect to time, given some initial value.
c +R t
0
i(t) o(t) Figure 11: A block representation of anintegrator with initial value c.
If the initial value is denoted by c, then the value of the output o at time tequals c plus the integral of the input i over the interval [0, t]. If i(t) = te�t
and c = 0, then o(t) = 1 � (1 + t)e�t.
A signal of the form
A cos (wt � q) (115)
with A > 0 is said to be harmonic with amplitude A, angular fre-quency w, and phase shift q. A harmonic signal with angular fre-quency2 w is periodic with period T = 2p/w.
2 The angular frequency equals thechange in phase per unit time. The fre-quency f = 1/T = w/2p equals thenumber of periods per unit time.
wt0
�A
A
qt
�A
A
A cos(wt � q)
t0
Figure 12: The graph of a harmonicsignal obtained from the height abovethe horizontal axis of a point movingcounterclockwise with angular speed won a circle of radius A centered at theorigin.
Example 19. The signal
f (t) := a cos wt + b sin wt (116)

lecture notes, me 340 33
is a sum of two harmonic signals with the same angular frequency (andtherefore the same period) and phase shifts 0 and p/2, respectively, since
sin wt = cos⇣
wt � p
2
⌘. (117)
Every harmonic signal A cos (wt � q) can be written in the form (116):
From A cos(wt � q) = A cos wt cos q + A sin wt sin q, it followsthat
a = A cos q and b = A sin q.
Square each side, add, and take the square root to obtain the ampli-tude:
A =p
a2 + b2.
Let the phase shift q be the unique angle in [�p, p) that satisfiesthe equations
cos q =ap
a2 + b2and sin q =
bpa2 + b2
.
It follows that a signal of the form (116) can be written as a harmonic signalwith period 2p/w and with amplitude and phase shift given in terms of theindividual amplitudes a and b.
Example 20. The derivative of the signal
f (t) := a cos wt + b sin wt (118)
equalsd f (t)
dt= �wa sin wt + wb cos wt. (119)
But,
� sin wt = cos⇣
wt +p
2
⌘= cos w
✓t �✓�T
4
◆◆(120)
andcos wt = sin
⇣wt +
p
2
⌘= sin w
✓t �✓�T
4
◆◆. (121)
We conclude that
d f (t)dt
= w
a cos w
✓t �✓�T
4
◆◆+ b sin w
✓t �✓�T
4
◆◆�, (122)
or, in other words,
d f (t)dt
= w f✓
t �✓�T
4
◆◆. (123)
This equals the original signal f (t) amplified by w and advanced3 by a 3 A signal that is delayed by a negativequantity is said to be advanced by theabsolute value of the quantity.
quarter period.

lecture notes, me 340 34
Example 21. The definite integral of the signal
f (t) := a cos wt + b sin wt (124)
over the interval [0, t] equals
Z t
0f (t)dt =
aw
sin wt � bw
cos wt
����t
0
=aw
sin wt � bw
cos wt +bw
. (125)
But,
sin wt = cos✓
wt � T4
◆(126)
and� cos wt = sin
✓wt � T
4
◆. (127)
We conclude thatZ t
0f (t)dt =
1w
f✓
t � T4
◆+
bw
. (128)
This equals the original signal f (t) amplified by 1/w, delayed by a quarterof a period, and added to the constant signal b/w.
In-class worksheet: an electrical circuit
Consider the electrical circuit shown below, consisting of a capacitorand a resistor in series.
a b c�! iRC
Vab
+Vac
�
Vbc Figure 13: An electrical circuit.
The voltage drop Vab across the capacitor in the direction of thecurrent i equals Q/C, where Q is the charge accumulated on the ca-pacitor and C is the capacitance. Similarly, the voltage drop Vbc acrossthe resistor in the direction of the current equals Ri, where R is theresistance.

lecture notes, me 340 35
Using Kirchhoff’s laws4, we conclude that4 Kirchhoff’s 1st law: The voltagechange between two nodes in a circuitis the same independently of the pathbetween the points. Kirchhoff’s 2ndlaw: Charge cannot accumulate atnodes in a circuit.
Vac(t) = Vab(t) + Vbc(t) (129)
equals the total voltage drop at time t, and
Q(t) = Q(0) +Z t
0i(t)dt (130)
equals the charge accumulated on the capacitor at time t. Differentia-tion on both sides of this relationship shows that
dQdt
(t) = i(t). (131)
Suppose that Vac is a given harmonic signal A cos wt and assumethat Vab(t) = B cos(wt � q) for some unknown amplitude B andphase shift q. Since Vab = Q/C, it follows that
Q(t) = CB cos(wt � q), (132)
which in turn implies that
i(t) =dQ(t)
dt= �wCB sin(wt � q) (133)
andVbc(t) = Ri(t) = �wRCB sin(wt � q). (134)
Substitution in (129) then yields
A cos wt = B cos(wt � q)� wRCB sin(wt � q). (135)
This implies that
A = B(cos q + wRC sin q), 0 = B(sin q � wRC cos q) (136)
or, in other words,
B =Ap
1 + (wRC)2(137)
andcos q =
1p1 + (wRC)2
, sin q =wRCp
1 + (wRC)2. (138)
If we design the circuit in Fig. 13, such that RC ⌧ 1/w, thenB ⇡ A and q ⇡ 0. In this case,
Vbc(t) = �wRCB sin(wt � q) ⇡ �wRCA sin wt (139)
or, in other words,
Vbc(t) ⇡ RCdVac
dt(t); (140)
the output voltage across the resistor is approximately proportionalto the derivative of the input voltage across the circuit.

lecture notes, me 340 36
If, instead, we design the circuit in Fig. 13, such that RC � 1/w,then wRCB ⇡ A and q ⇡ p/2. In this case,
Vab(t) = B cos(wt � q) ⇡ AwRC
sin wt (141)
or, in other words,
Vab(t) ⇡1
RC
Z t
0Vac(t)dt; (142)
the output voltage across the capacitor is approximately proportionalto the integral of the input voltage across the circuit.
The time constant of the electric circuit equals the product RCof the resistance and the capacitance. When the time constantis much smaller than the period of the harmonic input signal(RC ⌧ 1/w), the circuit acts as a differentiator. When thetime constant is much greater than the period of the harmonicinput signal (RC � 1/w), the circuit acts as an integrator.
In-class worksheet: a mechanical suspension
Consider the mechanical suspension shown below, consisting of aspring and a damper in parallel.
~Fe
k
x
id
~Fs = �kxi ~Fd = �dvi
~Fe
Free-body diagram: Figure 14: A mechanical suspension.
Let the unit vector i be parallel to the line of action of the sus-pension. Denote by x the displacement of the massless plate along irelative to its position when the spring is undeformed. It follows that
x(t) = x(0) +Z t
0v(t)dt, (143)

lecture notes, me 340 37
where v(t) is the velocity of the plate along i at time t. Differentiationon both sides of this relationship shows that
dxdt
(t) = v(t). (144)
The force ~Fs from the spring on the massless plate equals �kxi,where k is the stiffness. Similarly, the force ~Fd from the damper onthe massless plate equals �dvi, where d is the damping coefficient.Using Newton’s 2nd law5, and the fact that the plate is massless, we
5 Newton’s 2nd law: The net forceacting on an object equals its massmultiplied by its acceleration. For amassless object, it follows that the netforce must vanish.
conclude that~Fe(t) = �~Fs(t)� ~Fd(t) (145)
equals the external force applied to the plate at time t.Now suppose that ~Fe(t) = A cos(wt)i and assume that ~Fs(t) =
B cos(wt � q)i for some unknown amplitude B and phase shift q.Since ~Fs = �kxi, it follows that
x(t) = �Bk
cos(wt � q), (146)
which in turn implies that
v(t) =dx(t)
dt=
wBk
sin(wt � q) (147)
and~Fd(t) = �dv(t)i = �wdB
ksin(wt � q)i. (148)
Substitution in (145) then yields
A cos(wt) = �B cos(wt � q) +wdB
ksin(wt � q). (149)
This implies that
A = �B✓
cos q + wdk
sin q
◆, 0 = �B
✓sin q � w
dk
cos q
◆(150)
or, in other words,
B =Ap
1 + (wd/k)2(151)
and
cos q = � 1p1 + (wd/k)2
, sin q = � wd/kp1 + (wd/k)2
. (152)
If we design the suspension in Fig. 14, such that d/k ⌧ 1/w, thenB ⇡ A and q ⇡ p. In this case,
~Fd(t) = �wdBk
sin(wt � q)i ⇡ wdAk
sin(wt)i (153)

lecture notes, me 340 38
or, in other words,
~Fd(t) ⇡ �dk
d~Fedt
(t); (154)
the force applied to the damper is proportional to the rate of changeof the external force applied to the plate.
If, instead, we design the suspension in Fig. 14, such that d/k �1/w, then wdB/k ⇡ A and q ⇡ �p/2. In this case,
~Fs(t) = B cos(wt � q)i ⇡ � kAwd
sin(wt)i (155)
or, in other words,
~Fs(t) ⇡ � kd
Z t
0~Fe(t)dt; (156)
the force applied to the spring is approximately proportional to theintegral of the external force applied to the plate.
The time constant of the mechanical suspension equals theratio d/k of the damping coefficient and the spring stiffness.When the time constant is much smaller than the period ofthe harmonic input signal (d/k ⌧ 1/w), the suspension actsas a differentiator. When the time constant is much greaterthan the period of the harmonic input signal (d/k � 1/w), thesuspension acts as an integrator.
In-class worksheet: a water reservoir
Consider the liquid level system shown below, consisting of a waterreservoir and an inlet valve in series.
pa
q R
pa
C
Dp
g
hFigure 15: A water reservoir.
The pressure drop Pv across the valve equals rRq, where R is thevalve resistance, q is the fluid flow rate into the tank, and r is the liquid

lecture notes, me 340 39
density. Similarly, the pressure drop Pt between the bottom and topof the liquid in the tank equals rgh, where g is the acceleration ofgravity and h is the head of the liquid.
By conservation of mass, it follows that
rq = rCdhdt
, (157)
where C is the cross-sectional area of the tank. Moreover,
Dp = Pv + Pt (158)
equals the pressure increase across the pump.Now suppose that Dp(t) = p0 + A cos wt is given and assume that
Pt(t) = p0 + B cos(wt � q) for some unknown amplitude B < p0 andphase shift q. Since Pt = rgh, it follows that
h(t) =p0rg
+Brg
cos(wt � q), (159)
which in turn implies that
rq(t) = rCdh(t)
dt= �wCB
gsin(wt � q) (160)
andPv(t) = rRq(t) = �wRCB
gsin(wt � q). (161)
Substitution in (158) then yields
p0 + A cos(wt) = p0 + B cos(wt � q)� wRCBg
sin(wt � q). (162)
This implies that
A = B✓
cos q + wRCg
sin q
◆, 0 = B
✓sin q � w
RCg
cos q
◆(163)
or, in other words,
B =Ap
1 + (wRC/g)2(164)
and
cos q =1p
1 + (wRC/g)2, sin q =
wRC/gp1 + (wRC/g)2
. (165)
If we design the reservor in Fig. 15, such that RC/g ⌧ 1/w, thenB ⇡ A and q ⇡ 0. In this case,
Pv(t) = �wRCBg
sin(wt � q) ⇡ �wRCAg
sin wt (166)
or, in other words,
Pv(t) ⇡ �RCg
dDpdt
(t); (167)

lecture notes, me 340 40
the pressure drop across the valve is proportional to the rate ofchange of the pressure increase across the pump.
If, instead, we design the reservoir in Fig. 15, such that RC/g �1/w, then wRCB/g ⇡ A and q ⇡ p/2. In this case,
Pt(t)� p0 = B cos(wt � q) ⇡ � gAwRC
sin wt (168)
or, in other words,
Pt(t)� p0 ⇡ � gRC
Z t
0(Dp(t)� p0)dt; (169)
the alternating part of the pressure drop in the tank is approximatelyproportional to the integral of the alternating part of the pressureincrease across the pump.
The time constant of the water reservoir equals the ratio RC/gof the product of the valve resistance and tank cross sectionwith the acceleration of gravity. When the time constant ismuch smaller than the period of the harmonic input signal(RC/g ⌧ 1/w), the reservoir acts as a differentiator. Whenthe time constant is much greater than the period of the har-monic input signal (RC/g � 1/w), the reservoir acts as anintegrator.
Exercises
1. Find a unique angle q 2 [�p, p), such that
cos q =1p2
, sin q = � 1p2
.
2. Find a unique angle q 2 [�p, p), such that
cos q = � 1p2
, sin q = � 1p2
.
3. How many angles q 2 [�p, p) satisfy the condition that tan q = 1?
4. Determine A, w, and q such that
cos 2t � sin 2t = A cos(wt � q).
5. Determine a, b, and w such that
3 sin(4t � p/3) = a cos wt + b sin wt.

lecture notes, me 340 41
6. Determine B, w, and j such that
3 cos(t � p/4) + 4 sin(t � p/4) = B sin(wt + j).
7. Determine B and q such that
cos t = B cos(t � q)� 2B sin(t � q).
8. Graph the signal f (t) := 3 cos pt � sin pt, its derivative, and itsdefinite integral over the interval [0, t] in the same diagram.
9. Suppose that the input signal to each of the components belowis given by i(t) = e�t for t � 0 and 0 otherwise. In each case,determine the output signal o(t) for t � 0, and graph i(t) and o(t).
0.6i(t) o(t)
i(t) o(t)0.6
0.6 +R t
0
i(t) o(t)
•
Solutions
1. Since cos is an even function, cos q = 1/p
2 implies that q is eitherp/4 or �p/4. Only the latter satisfies the condition that sin q =
�1/p
2.
2. Since cos is an even function, cos q = �1/p
2 implies that q iseither 3p/4 or �3p/4. Only the latter satisfies the condition thatsin q = �1/
p2.
3. Since tan is a periodic function with period p, tan q = 1 if q iseither p/4 or �3p/4.
4. Since A cos(wt � q) = A cos q cos wt + A sin q sin wt, it follows thatw = 2 and
A cos q = 1, A sin q = �1.
Squaring and adding the two equations yields A2 = 2 ) A =p
2.The angle q lies in the fourth quadrant, i.e., q = �p/4.

lecture notes, me 340 42
5. Since cos p/3 = 1/2 and sin p/3 =p
3/2,
3 sin(4t � p/3) =32
sin 4t � 3p
32
cos 4t.
It follows that w = 4, a = �3p
3/2, and b = 3/2.
6. Since
3 cos(t � p/4) =3p2
cos t +3p2
sin t,
4 sin(t � p/4) =4p2
sin t � 4p2
cos t,
andB sin(wt + j) = B sin wt cos j + B cos wt sin j,
it follows that w = 1 and
� 1p2= B sin j,
7p2= B cos j.
Squaring and adding gives 25 = B2 ) B = 5. The angle j lies inthe fourth quadrant and equals � arcsin(1/5
p2).
7. Since
cos t = cos(t � q + q) = cos(t � q) cos q � sin(t � q) sin q,
it follows thatcos q = B, sin q = 2B,
i.e., B = 1/p
5 and q = arcsin(2/p
5).
8. Here,d f (t)
dt= �3p sin pt � p cos pt
and Z t
0f (t)dt =
3p
sin pt +1p
cos pt � 1p
.
t
5
�5
p
d f (t)/dt
R t0 f (t)dt
9. For the amplifier, o(t) = 0.6e�t for t � 0 and 0 otherwise.

lecture notes, me 340 43
t
1
1�1
i(t)
o(t)
For the delay line, o(t) = e�(t�0.6) for t � 0.6 and 0 otherwise.
t
1
11
o(t)i(t)
For the integrator, o(t) = 1.6 � e�t for t � 0 and 0 otherwise.
t
1
11
o(t)
i(t)

lecture notes, me 340 44
Lesson 2 – Block diagrams and system representations
TAKE-AWAYS:
* A block diagram is a wiring of components, using summingand splitting junctions, to represent the input-output relation-ship of a dynamic system.
* The initial-value problem
dodt
(t) = i(t), o(0) = c
corresponds to the relationship between the input i(t) andoutput o(t) of an integrator with initial value c.
* The initial-value problem
dodt
(t) + ao(t) = i(t), o(0) = c
corresponds to the relationship between the input i(t) andoutput o(t) of an integrator with initial value c and negativefeedback with gain a.
* The initial-value problem
d2odt2 + a
dodt
+ bo(t) = i(t), o(0) = d,dodt
(0) = c
corresponds to the relationship between the input i(t) andoutput o(t) of a double integrator with initial values c and dand negative feedback with gains a and b.

lecture notes, me 340 45
Online lecture: initial-value problems
Amplifiers, line delays, and integrators are examples ofsystem components with block representations shown in Lesson 1. Inaddition, we consider multi-input-single-output summing junctionsand single-input-multiple-output splitting junctions.
i1(t) +
i2(t)
�
i3(t)
� i1(t)� i2(t)� i3(t)•
i(t)
i(t)
i(t)
i(t)
Figure 16: Example block represen-tations of summing and splittingjunctions.
By suitable wiring, a collection of components and junctions mayrepresent a composite relationship between inputs and outputs thatcould not be captured by the simple components considered thus far.Such a wiring diagram of components is called a block diagram. Theorder in which components are wired together matters.
Example 22. Consider the following block diagram.
Kx(t)i(t)
c +R t
0
o(t) Figure 17: An amplifier followed by anintegrator.
Here,
x(t) = Ki(t), o(t) = c +Z t
0x(t)dt. (170)
Together these imply that
o(t) = c + KZ t
0i(t)dt. (171)
If we switch the order of the components, then
o(t) = K✓
c +Z t
0i(t)dt
◆, (172)
which equals the earlier result if the initial value c = 0.

lecture notes, me 340 46
Example 23. Consider the following block diagram.
c +R t
0
x(t)i(t) D o(t) Figure 18: Integrator followed by adelay line.
Here,
x(t) = c +Z t
0i(t)dt, o(t) = x(t � D). (173)
Together these imply that, for t > D,
o(t) = c +Z t�D
0i(t)dt. (174)
If we switch the order of the components, then
o(t) = c +Z t
0i(t � D)dt = c +
Z t�D
�Di(s)ds, (175)
where s = t � D. This equals the previous result if i(t) = 0 for t < 0.
The input-output relationship for an integrator
o(t) = c +Z t
0i(t)dt (176)
is equivalent to the initial-value problem
o(0) = c,dodt
(t) = i(t). (177)
More complicated initial-value problems may be obtained by addingconnections and additional components to the basic integrator.
Example 24. Consider the following block diagram.
c +R t
0 •
a
i(t)+ x(t) o(t)
�
Figure 19: Integrator with feedback.
Here,
x(t) = i(t)� ao(t), o(t) = c +Z t
0x(t)dt. (178)
Together these imply that
o(t) = c +Z t
0
�i(t)� ao(t)
�dt, (179)

lecture notes, me 340 47
which is equivalent to the initial-value problem
o(0) = c,dodt
(t) + ao(t) = i(t); (180)
the general form of a first-order, scalar, constant-coefficient, linear, nonhomo-geneous differential equation.
Example 25. Consider the following block diagram
c +R t
0 •y(t)
d +R t
0 •
a
b
i(t)+ x(t) o(t)
�
�
Figure 20: A double integrator withfeedback.
Here, x(t) = i(t)� ay(t)� bo(t) and
y(t) = c +Z t
0x(t)dt, o(t) = d +
Z t
0y(t)dt. (181)
Together these imply that y(0) = c, o(0) = d, and
dydt
= i � ay � bo,dodt
= y (182)
or, in other words,
d2odt2 + a
dodt
+ bo = i, o(0) = d,dodt
(0) = c; (183)
the general form of a second-order, scalar, constant-coefficient, linear, nonho-mogeneous differential equation.
In-class worksheet: a mechanical suspension
Consider the single-layered mechanical suspension shown on thenext page. Let the unit vector i be parallel to the line of action of thesuspension. Denote by x the displacement of the massless plate alongi relative to its position when the spring is undeformed. It followsthat
x(t) :=dxdt
(t) = v(t). (184)

lecture notes, me 340 48
f (t)i
k
x
id
~Fs = �kxi ~Fd = �dvi
f (t)i
Free-body diagram: Figure 21: A single-layered suspension.
where v(t) is the velocity of the plate along i at time t.The force ~Fs from the spring on the massless plate equals �kxi,
where k is the stiffness. Similarly, the force ~Fd from the damper onthe massless plate equals �dvi, where d is the damping coefficient.Using Newton’s 2nd law, and the fact that the plate is massless, weconclude that
f (t) = kx(t) + dx(t). (185)
We can convert this ordinary differential equation to the integralequation
x(t) = x(0) +Z t
0
f (t)� kx(t)d
dt (186)
A corresponding single-integrator block diagram is shown below.
x(0) +R t
0 •
k
1d
f (t) + x(t)
�
Figure 22: An equivalent block dia-gram.

lecture notes, me 340 49
Consider, instead, the multi-layered mechanical suspension shownin the figure below.
f (t)i
k1
k2
x1
x2
id1
d2
Figure 23: A multi-layered suspension.
Let the unit vector i again be parallel to the line of action of thesuspension. Denote by x1 and x2 the displacements of the lower andupper massless plates, respectively, along i relative to their positionin the configuration where both springs are undeformed. It followsthat
x1(t) :=dx1dt
(t) = v1(t), x2(t) :=dx2dt
(t) = v2(t), (187)
where v1(t) and v2(t) are the velocities of the two plates along i attime t.
Consider the free-body diagrams shown on the next page. If weapply Newton’s 2nd law to the lower plate, we obtain the equation offorce balance
k2(x2(t)� x1(t)) = k1x1(t) + d1 x1(t), (188)
where k1 and k2 are the corresponding spring stiffnesses and d1 is thedamping coefficient. Similarly, if we apply Newton’s 2nd law to theupper plate, we obtain the equation of force balance
f (t) = k2�
x2(t)� x1(t)�+ d2 x2(t), (189)
where d2 is the other damping coefficient.We can convert these ordinary differential equations to the integral
equations
x1(t) = x1(0) +Z t
0
k2�
x2(t)� x1(t)�� k1x1(t)
d1dt (190)

lecture notes, me 340 50
�k1x1 i �d1v1 i
k2(x2 � x1)i
�k2(x2 � x1)i �d2v2 i
f (t)i
Free-body diagrams:
Figure 24: Free body diagrams for thetwo plates.
and
x2(t) = x2(0) +Z t
0
f (t)� k2�
x2(t)� x1(t)�
d2dt (191)
A corresponding two-integrator block diagram is shown below.
•
x2(0) +R t
0 •
• x1(t)x1(0) +R t
0
k2
k1
1d2
1d1
f (t) + x2(t)
+
�
+
�
�
Figure 25: An equivalent block dia-gram.
Now suppose that the upper plate has a nonzero mass m. Applica-tion of Newton’s 2nd law then results in
mx2(t) = f (t)� k2�
x2(t)� x1(t)�� d2 x2(t) (192)
where
x2(t) :=d2x2dt2 (t). (193)

lecture notes, me 340 51
If we let y(t) := x2(t) and y(t) = x2(t), then this is equivalent to thefirst-order equations
x2(t) = y(t), my(t) = f (t)� k2�
x2(t)� x1(t)�� d2y(t) (194)
and the corresponding integral equations
x2(t) = x2(0) +Z t
0y(t)dt (195)
and
y(t) = y(0) +Z t
0
f (t)� k2�
x2(t)� x1(t)�� d2y(t)
mdt (196)
A corresponding three-integrator block diagram is shown below.
•
y(0) +R t
0 •y(t)
x2(0) +R t
0 •
• x1(t)x1(0) +R t
0
k2
k1
d2
1m
1d1
f (t) + � x2(t)
+
�
+
�
�
Figure 26: An equivalent block dia-gram.
Exercises
1. Determine i(t) and o(t) such that
22 sin 2ti(t)
�1 +R t
0
o(t)
2. Determine i(t) and o(t) such that

lecture notes, me 340 52
�2 +R t
0
�2 cos 3t2
i(t) o(t)
3. Determine a value for c, such that
c +R t
0
x(t)K
i(t) 4e�t sin 2t
4. Suppose that u(t) = 1 for t � 0 and 0 otherwise. Determine x(t)and o(t), such that
R t0
x(t)u(t) 1 o(t)
5. Suppose that u(t) = 1 for t � 0 and 0 otherwise. Determine x(t)and o(t), such that
x(t) R t0
u(t) 1 o(t)
6. Draw a block diagram representing the initial-value problem
o(0) = 3,dodt
(t) + o(t) = i(t).
7. Draw a block diagram representing the initial-value problem
o(0) = 0, 2dodt
(t) = i(t)� o(t).
8. Draw a block diagram representing the initial-value problem
o(0) = �1,dodt
(0) = 2,d2odt2 (t) +
dodt
(t) + 4o(t) = i(t).
9. Formulate an initial-value problem corresponding to the blockdiagram
R t0 •
y(t)�1 +
R t0 •
3
2
i(t) + + o(t)
��

lecture notes, me 340 53
10. Suppose that u(t) = 1 for t � 0 and 0 otherwise. Verify that
x1(t) =19�3t + e�3t � 1
�, x2(t) =
118�6t � e�3t + 1
�
satisfy the block diagram
•
R t0 •
• x1(t)R t
0
2
12
u(t) + x2(t)
+
�
�
•
Solutions
1. Here,
2 sin 2t = 2i(t), o(t) = �1 +Z t
02 sin 2t dt.
It follows that i(t) = sin 2t and o(t) = � cos 2t.
2. Here,
�2 cos 3t = �2 +Z t
0i(t)dt, o(t) = 2(�2 cos 3t).
It follows that i(t) = 6 sin 3t and o(t) = �4 cos 3t.
3. Here,
x(t) = c +Z t
0i(t)dt, 4e�t sin 2t = Kx(t)
which implies that x(0) = c = 0.
4. For 0 t 1
x(t) =Z t
0dt = t, o(t) = 0.
For t � 1,
x(t) =Z t
0dt = t, o(t) = x(t � 1) = t � 1.

lecture notes, me 340 54
5. For 0 t 1,
x(t) = 0, o(t) =Z t
0x(t)dt = 0.
For t � 1,
x(t) = 1, o(t) =Z t
0x(t)dt =
Z t
1dt = t � 1.
6. Here,
dodt
(t) = i(t)� o(t), o(0) = 3 ) o(t) = 3 +Z t
0
�i(t)� o(t)
�dt
A corresponding block diagram is shown below.
3 +R t
0 •i(t)+ o(t)
�
7. Here,
dodt
(t) =i(t)� o(t)
2, o(0) = 0 ) o(t)
Z t
0
i(t)� o(t)2
dt.
A corresponding block diagram is shown below.
R t0 •1
2
i(t)+ o(t)�
8. Here, y(t) = do(t)/dt implies that
o(t) = �1 +Z t
0y(t)dt
anddydt
(t) = i(t)� 4o(t)� y(t) ) y(t) = 2+Z t
0
�i(t)� 4o(t)� y(t)
�dt
A corresponding block diagram is shown below.
2 +R t
0 •y(t)
�1 +R t
0 •
4
i(t)+ o(t)
�
�

lecture notes, me 340 55
9. Here,
dydt
(t) + 3y(t) = i(t), y(0) = 0
dodt
(t) + 2o(t) = y(t), o(0) = �1
This implies that
d2odt2 (t) + 2
dodt
(t) =dydt
(t) = i(t)� 3y(t) = i(t)� 3dodt
(t)� 6o(t)
anddodt
(0) = y(0)� 2o(0) = 2
or, in other words,
d2odt2 (t) + 5
dodt
(t) + 6o(t) = i(t), o(0) = 0,dodt
(0) = 2
10. Since x1(0) = x2(0) = 0, the given functions are compatible withthe initial values of the integrators. Moreover,
x2(t)� x1(t) =16� 1
6e�3t
Consequently,
Z t
02�
x2(t)� x1(t)�
dt =Z t
0
✓13� 1
3e�3t
◆dt = x1(t)
andZ t
0
12�1 � 2
�x2(t)� x1(t)
��dt =
Z t
0
✓13+
16
e�3t◆
dt = x2(t)

lecture notes, me 340 56
Lesson 3: First-order responses and system properties
TAKE-AWAYS:
* The solution to the initial-value problem
dydt
(t) + ay(t) = f (t), y(0) = c
is given by
y(t) = ce�at +
✓f (#) ⇤ e�a#
◆(t),
where ✓f (#) ⇤ g(#)
◆(t) :=
Z t
0f (t)g(t � t)dt
is the convolution of the functions f and g.
* The free response of a dynamic system is the output givenzero input. For the initial-value problem above, the free re-sponse equals ce�at.
* The unit step response of a dynamic system is the outputwhen the input equals 1 for t � 0 and 0 otherwise, denoted byu(t), and with c = 0. For the initial-value problem above, theunit step response equals (1 � e�at)/a.
* The unit impulse response of dynamic system is the limit asD ! 0 of the output when the input equals 1/D for 0 t Dand 0 otherwise, i.e.,
�u(t)� u(t � D)
�/D, and with c = 0. For
the initial-value problem above, the unit step response equalsthe free response with initial value c = 1, i.e., e�at.
* The unit impulse d(t) is a symbolic notation representingthe “limit” as D ! 0 of the signal
�u(t) � u(t � D)
�/D. In
particular, ✓d(#) ⇤ e�a#
◆= e�at.

lecture notes, me 340 57
Online lecture: convolutions
The block diagram in Example 24 corresponds to the initial-value problem
dydt
(t) + ay(t) = f (t), y(0) = c (197)
where we have written y for the output and f for the input. Thesolution to this initial-value problem is given by
y(t) = ce�at +Z t
0f (t)e�a(t�t) dt. (198)
If we let6
6 In the notation f (#), the # symbol isused to represent the argument of thefunction f , in order to avoid duplicateuse of t.
✓f (#) ⇤ e�a#
◆(t) :=
Z t
0f (t)e�a(t�t) dt (199)
denote the convolution of f with the exponentially decaying signale�at, then
y(t) = ce�at +
✓f (#) ⇤ e�a#
◆(t). (200)
To verify that this is the correct solution, we substitute back intothe initial-value problem:
Since e0 = 1 and✓
f (#) ⇤ e�a#◆(0) =
Z 0
0f (t)eat dt = 0,
it follows that y(0) = c. This verifies the initial condition.
To verify the differential equation, recall that
ddt
Z t
0g(t, t)dt =
Z t
0
∂g(t, t)∂t
dt + g(t, t).
It follows that
ddt
✓f (#) ⇤ e�a#
◆(t) = �a
✓f (#) ⇤ e�a#
◆(t) + f (t)
Finally,
dydt
(t) = �ace�at � a
✓f (#) ⇤ e�a#
◆(t) + f (t) = �ay(t) + f (t).
When a = 0, there is no feedback, and the output signal equals theoutput of an integrator with initial value c, i.e.,
y(t) = c +Z t
0f (t)dt. (201)

lecture notes, me 340 58
Now suppose that a > 0.
Example 26. If f (t) = 0 for t � 0, i.e., in the absence of any input, thesolution in (198) becomes the free response
y(t) = ce�at. (202)
t
y(t)
c
c/e
ce�at
1/a
Figure 27: The free response.
The output decays to a fraction 1/e of its original value after the charac-teristic time 1/a, known as the time constant of the system.
The unit step u(t) is a signal that equals 1 for t � 0 and 0 other-wise.
t
u(t)
1
Figure 28: The unit step signal.
Example 27. If f (t) = u(t) and c = 0, the solution7 in (198) becomes 7 This is the unit step response.
y(t) =✓
u(#) ⇤ e�a#◆(t) :=
Z t
0e�a(t�t) dt =
1a
e�a(t�t)���t
0(203)
or, in other words,y(t) =
1a� 1
ae�at. (204)
The output converges to a steady-state value yss = 1/a in such a waythat y(t)� yss decays to 0 exactly as the free response of a first-order systemwith time constant 1/a.

lecture notes, me 340 59
The delayed unit step signal u(t � D) equals 1 for t � D and 0otherwise. The signal
u(t)� u(t � D)D
(205)
then equals 0 for t < 0 and t > D and 1/D for 0 t D. This is apulse with amplitude 1/D and pulse width D.
t
u(t)�u(t�D)D
1/D
D
Figure 29: A pulse signal with ampli-tude 1/D and width D.
Example 28. For f (t) = 1D�u(t)� u(t � D)
�and with c = 0, the solution
in (198) for t � D becomes
y(t) =1D
Z D
0e�a(t�t) dt =
e�at
D
Z D
0eat dt =
e�at
aDeat
����D
0(206)
or, in other words,
y(t) =eaD � 1
aDe�at. (207)
Using l’Hospital’s rule, we recall that
limx!0
ex � 1x
= 1. (208)
In the limit as the pulse width D ! 0, the output thus converges to the freeresponse with initial condition equal to 1. We call this the unit impulse
response. In particular, we have
e�at = limD!0
✓u(#)� u(# � D)
D⇤ e�a#
◆(t). (209)
We represent the right-hand side symbolically by the convolution✓
d(#) ⇤ e�a#◆(t). (210)

lecture notes, me 340 60
The unit impulse d(t) acts in convolution with the exponentially decay-ing signal e�at as multiplication by 1.
t
D ! 0
)
t
d(t)
1
Figure 30: The unit impulse representsa limit of pulse signals.
In-class worksheet: a mechanical suspension
Consider the single-layered mechanical suspension and the corre-sponding block diagram of an integrator with feedback shown in thefigure below.
f (t)i
k
x
id
x(0) +R t
0 •
k
1d
f (t) + x(t)
�
Figure 31: A single-layered suspensionand the corresponding block diagram.

lecture notes, me 340 61
If x(0) = 0, it follows that
x(t) =✓
f (#)d
⇤ e�k#/d◆(t) =
Z t
0
f (t)d
e�k(t�t)/d dt. (211)
Suppose that f (t) = 1/D for 0 t D and 0 otherwise.
t
f (t)
1/D
D
Then, for 0 t D,
x(t) =Z t
0
1dD
e�k(t�t)/d dt =1
kDe�k(t�t)/d
����t=t
t=0(212)
or, in other words,
x(t) =1
kD�1 � e�kt/d�. (213)
Similarly, for t � D,
x(t) = x(D)e�k(t�D)/d (214)
But,
x(D) =1
kD�1 � e�kD/d�, (215)
which converges to 1/d as D ! 0. By substitution into (214) It fol-lows that the unit impulse response equals
x(t) =1d
e�kt/d. (216)
Suppose that f (t) = 2(D � t)/D2 for 0 t D and 0 otherwise.
t
f (t)
2/D
D

lecture notes, me 340 62
Then, for 0 t D,
x(t) =Z t
0
2(D � t)dD2 e�k(t�t)/d dt = 2d
1 + k(D � t)/dk2D2 e�k(t�t)/d
����t=t
t=0(217)
or, in other words,
x(t) = 2d1 + k(D � t)/d
k2D2 � 2d1 + kD/d
k2D2 e�kt/d. (218)
As before, for t � D,
x(t) = x(D)e�k(t�D)/d (219)
But,
x(D) =2d
k2D2
⇣1 �
�1 + kD/d
�e�kD/d
⌘(220)
which also converges to 1/d as D ! 0 by l’Hospital’s rule. It fol-lows that the response to the given input f (t) converges to the unitimpulse response as D ! 0.
In-class worksheet: linearity, causality, and time-invariance
A linear SISO dynamic system satisfies the superposition principle:
If the input signal i1(t) results in the output o1(t), and the in-put signal i2(t) results in the output o2(t), then the input sig-nal ai1(t) + i2(t) results in the output ao1(t) + o2(t).
Example 29. For a zero-initial-value integrator What happens if the initial value isdifferent from zero?Z t
0(a f (t) + g(t)) dt = a
Z t
0f (t)dt +
Z t
0g(t)dt. (221)
A system consisting of a single zero-initial-value integrator is thereforelinear. Similarly, for a delay line
ai1(t � D) + i2(t � D) =�ai1(#) + i2(#)
�(t � D) (222)
A system consisting of a single delay line is therefore linear. It is straight-forward to show that the same conclusion applies to a system consisting of asingle amplifier.
Block diagrams consisting of linear components, summing, andsplitting junctions are linear.
Example 30. For a zero-initial-value integrator with feedback, linearityfollows from a study of the two block diagrams below. It also follows fromthe explicit solution
o(t) =✓
i(#) ⇤ e�a#◆(t) :=
Z t
0i(t)e�a(t�t) dt (223)
since the convolution integral is linear in i.

lecture notes, me 340 63
R t0 •
a
i1(t), i2(t) + o1(t), o2(t)
�
R t0 •
a
ai1(t) + i2(t)+ ao1(t) + o2(t)
�
Figure 32: An integrator with feedbackand zero initial value is linear.
A time-invariant SISO dynamic system satisfies the time-shiftprinciple:
If the input signal i(t)u(t) results in the output o(t)u(t),then the input signal i(t � D)u(t � D) results in the outputo(t � D)u(t � D).
This is clearly true of amplifiers, delay lines, and zero-initial-valueintegrators. Block diagrams consisting of time-invariant components,summing, and splitting junctions are time invariant.
Example 31. Replace f (t) by f (t)u(t) in the integral in (198) and assumethat c = 0. It follows that
y(t) =✓
f (#)u(#) ⇤ e�a#◆(t) :=
Z t
0f (t)u(t)e�a(t�t) dt. (224)
Replace, instead, f (t) by f (t � D)u(t � D) in the integral in (198) andassume again that c = 0. Then, for t < D, we obtain y(t) = 0. For t � D,
y(t) =Z t
Df (t � D)u(t � D)e�a(t�t) dt (225)
or, in other words,
y(t) =Z t�D
0f (s)u(s)e�a(t�D�s) ds, (226)
where t = D + s and dt = ds. But this equals⇣
f (#)u(#) ⇤ e�a#⌘(t � D), (227)

lecture notes, me 340 64
i.e., the output signal obtained with f (t)u(t) as input, but delayed by D.Thus, since✓
f (# � D)u(# � D) ⇤ e�a#◆(t) =
✓f (#)u(#) ⇤ e�a#
◆(t � D)u(t � D),
(228)a zero-initial-value integrator with feedback is time invariant.
A causal SISO dynamical system satisfies the causality principle:
If the input signals i1(t) and i2(t) are identical for t D, thenthe outputs o1(t) and o2(t) are identical for t D.
This is clearly true for amplifiers and delay lines. It is also true for azero-initial-value integrator with feedback, since the output is givenby the convolution
✓i(#) ⇤ e�a#
◆(t) =
Z t
0i(t)e�a(t�t) dt, (229)
which only depends on values of i(t) for t t.Block diagrams consisting of causal components, summing, and
splitting junctions are causal.
Exercises
1. Use a variable substitution to show that✓
f (#) ⇤ g(#)◆(t) =
✓g(#) ⇤ f (#)
◆(t)
2. Suppose that f (0) = 0 and let F(t) = d f (t)/dt. Show that✓
u(#) ⇤ F(#)◆(t) = f (t)
3. Compute the convolution✓
ea# ⇤ eb#◆(t).
when a 6= b.
4. Use the previous result to compute the convolution✓
sin 2# ⇤ sin 3#◆(t).

lecture notes, me 340 65
5. Describe the convolution✓
sin w# ⇤ e�a#◆(t)
for t � 1/a.
6. Find the solution for t � 0 to the initial-value problem
dydt
(t) + 2y(t) = t, y(0) = �1.
7. Find the solution for t � 0 to the initial-value problem
dydt
(t) + y(t) = e�t, y(0) = 1.
8. Find the free response, the unit step response, and the unit im-pulse response of the dynamic system shown below.
2 +R t
0 •
12
i(t)+ o(t)
�
9. Find the free response, the unit step response, and the unit im-pulse response of the dynamic system shown below.
�1 +R t
0 •
12
2i(t) + o(t)
�
10. Find the response of the dynamic system below in the limit asb ! • and compare this to the unit impulse response. Graph theinput and output for several representative values of b.
R t0 •
2
be�bt+ o(t)
�
•

lecture notes, me 340 66
Solutions
1. Here, ✓f (#) ⇤ g(#)
◆(t) =
Z t
0f (t)g(t � t)dt
or, with the substitution s = t � t,
�Z 0
tf (t � s)g(s)ds =
✓g(#) ⇤ f (#)
◆(t)
2. Here, ✓u(#) ⇤ F(#)
◆(t) =
Z t
0F(t)u(t � t)dt
or, since u(t � t) = 1 for 0 t t,Z t
0F(t)dt = f (t)� f (0) = f (t).
3. Here, ✓ea# ⇤ eb#
◆(t) =
Z t
0eateb(t�t) dt
or, in other words,
e(a�b)t+bt
a � b
����t=t
t=0=
eat � ebt
a � b.
since a 6= b.
4. Since
sin wt =ejwt � e�jwt
j2,
it follows that✓
sin 2# ⇤ sin 3#◆(t) =
✓ej2# � e�j2#
j2⇤ ej3# � e�j3#
j2
◆(t).
But,✓
ej2# ⇤ ej3#◆(t) =
ej3t � ej2t
j✓
ej2# ⇤ e�j3#◆(t) =
ej2t � e�j3t
j5✓
e�j2# ⇤ ej3#◆(t) =
ej3t � e�j2t
j5✓
e�j2# ⇤ e�j3#◆(t) =
e�j2t � e�j3t
j
By linearity, (sin 2# ⇤ sin 3#) (t) equals
� 14
✓ej3t � ej2t
j� ej2t � e�j3t
j5� ej3t � e�j2t
j5+
e�j2t � e�j3t
j
◆
= �25
sin 3t +35
sin 2t

lecture notes, me 340 67
5. Since
sin wt =ejwt � e�jwt
j2,
it follows that✓
sin w# ⇤ e�a#◆(t) =
1j2
✓ejw# ⇤ e�a#
◆(t)� 1
j2
✓e�jw# ⇤ e�a#
◆(t)
But,✓
ejw# ⇤ e�a#◆(t) =
ejwt � e�at
a + jw✓
e�jw# ⇤ e�a#◆(t) =
e�jwt � e�at
a � jw
For t � 1/a, e�at ⇡ 0 and✓
sin w# ⇤ e�a#◆(t) ⇡ 1
j2
✓ejwt
a + jw� e�jwt
a � jw
◆
which equals the imaginary part of
ejwt
a + jw
i.e.,a sin wt � w cos wt
a2 + w2
6. Using integration by parts,
✓# ⇤ e�2#
◆(t) =
Z t
0te�2(t�t) dt =
✓t
2� 1
4
◆e�2(t�t)
����t=t
t=0
or, in other words,✓
# ⇤ e�2#◆(t) =
t2� 1
4+
14
e�2t
It follows thaty(t) =
t2� 1
4� 3
4e�2t
7. Since ✓e�# ⇤ e�#
◆(t) =
Z t
0e�te�(t�t) dt = te�t,
it follows thaty(t) = (1 + t)e�t.
8. For t � 0,
o(t) = 2e�t/2 +
✓i(#) ⇤ e�#/2
◆(t).

lecture notes, me 340 68
For the free response, i(t) = 0 for all t, in which case
o(t) = 2e�t/2.
For the unit step response, i(t) = u(t) and we ignore the contribu-tion from the initial condition, in which case
o(t) =✓
u(#) ⇤ e�#/2◆(t) = 2(1 � e�t/2).
For the unit impulse response, i(t) = d(t) and we ignore thecontribution from the initial condition, in which case
o(t) =✓
d(#) ⇤ e�#/2◆(t) = e�t/2.
9. Here,
o(t) = �1 +Z t
02✓
i(t)� 12
o(t)◆
dt
or, in other words,
dodt
(t) + o(t) = 2i(t), o(0) = �1
It follows that, for t � 0,
o(t) = �e�t +
✓2i(#) ⇤ e�#
◆(t)
For the free response, i(t) = 0 for all t, in which case
o(t) = �e�t.
For the unit step response, i(t) = u(t) and we ignore the contribu-tion from the initial condition, in which case
o(t) =✓
2u(#) ⇤ e�#◆(t) = 2(1 � e�t).
For the unit impulse response, i(t) = d(t) and we ignore thecontribution from the initial condition, in which case
o(t) =✓
2d(#) ⇤ e�#◆(t) = 2e�t.
10. For t � 0 and b 6= 2,
o(t) =✓
be�b# ⇤ e�2#◆(t) = b
e�bt � e�2t
2 � b.
In the limit as b ! •, o(t) converges to e�2t, i.e., the unit im-pulse response. The diagrams below show the input and output,respectively, for three different values of b.

lecture notes, me 340 69
t
b ! • be�bt
t
1
o(t) = b e�bt�e�2t
2�b
e�2t

lecture notes, me 340 70
Lesson 4 – Laplace transforms and transfer functions
TAKE-AWAYS:
* If | f (t)| Meat for all t � 0 and some M > 0, then theLaplace transform
L⇥
f (#)⇤(s) :=
Z •
0f (t)e�st dt
is defined for all complex numbers s with real part greaterthan a. The Laplace transform is a linear operation.
* For any complex number a,
Lhea#i(s) =
1s � a
.
For any real number D > 0,
L⇥
f (# � D)u(# � D)⇤(s) = e�sDL
⇥f (#)u(#)
⇤(s).
Moreover,
LZ #
0f (t)dt
�(s) =
1sL⇥
f (#)⇤(s)
and
L✓
f (##) ⇤ g(##)◆(#)�(s) = L
⇥f (#)
⇤(s) · L
⇥g(#)
⇤(s)
known as the convolution theorem.
* In a convolution dynamic system with
L⇥o(#)
⇤(s) = L
⇥i(#)
⇤(s) · H(s),
the transfer function H(s) is the Laplace transform of the unitimpulse response h(t) and
o(t) =✓
i(#) ⇤ h(#)◆(t).

lecture notes, me 340 71
Online lecture: time and frequency domains
A piece of magic: If we replace every signal f (t) by its Laplacetransform
L⇥
f (#)⇤(s) :=
Z •
0f (t)e�st dt, (230)
then the action of amplifiers, delay lines, zero-initial-value integra-tors, and zero-initial-value integrators with feedback in the timedomain correspond to multiplication with an appropriate function ofthe complex number s in the frequency domain.
Example 32. The zero-initial-value integrator with negative feedbackmay be represented in a block diagram in the time domain or the frequencydomain, as shown below.
R t0 •
a
i(t) + o(t)
�
Time domain:
Frequency domain:
1s •
a
L⇥i(#)
⇤(s) + L
⇥o(#)
⇤(s)
�
Figure 33: A representation of a zero-initial-value integrator with negativefeedback in the time and frequencydomains.
In the time domain,
o(t) =Z t
0
�i(t)� ao(t)
�dt. (231)
In the frequency domain
L⇥o(#)
⇤(s) =
1s
✓L⇥i(#)
⇤(s)� aL
⇥o(#)
⇤(s)◆
(232)
or, in other words,
L⇥o(#)
⇤(s) =
1s + a
L⇥i(#)
⇤(s) (233)
We obtain the output signal o(t), for a given input i(t), by returning to thetime domain on both sides of this equation. It should come as no surprisethat, in this case, the answer is in the form of a convolution.

lecture notes, me 340 72
For piecewise continuous functions f (t) such that | f (t)| Meat forall t � 0 and some M > 0, the Laplace transform L
⇥f (#)
⇤(s) is finite
for all complex numbers s with real part greater than a. In particular,
L⇥
f (#)⇤(s) = L
⇥f (#)u(#)
⇤(s). (234)
Example 33. The unit step f (t) = u(t) satisfies the inequality | f (t)| Meat for all t � 0 for M = 1 and a = 0. Its Laplace transform is finiteprovided that the real part of s is positive and equals
L⇥u(#)
⇤(s) =
Z •
0e�st dt = �1
se�st
����•
0=
1s
. (235)
The unit step is the unique signal whose Laplace transform equals 1/s.
Example 34. For every real or complex number a, the exponential functionf (t) = eat satisfies the inequality | f (t)| Meat for all t � 0 for M = 1and a equal to the real part of a. Its Laplace transform is finite provided thatthe real part of s is greater than the real part of a, in which case
Lhea#i(s) =
Z •
0e(a�s)t dt =
1a � s
e(a�s)t����•
0=
1s � a
. (236)
The exponential function eat is the unique signal whose Laplace transformequals 1/(s � a).
If the input signal to the zero-initial-value integrator with negativefeedback in Example 32 is the unit step, i.e., i(t) = u(t), then
L⇥o(#)
⇤(s) =
1s + a
L⇥i(#)
⇤(s) =
1s(s + a)
=1a
✓1s� 1
s + a
◆(237)
or, by linearity,
o(t) =1a
�1 � e�at� (238)
for t � 0. This analysis is an example of the general observation:
For dynamic systems consisting of amplifiers and integrators,as well as summing and splitting junctions, calculus in thetime domain becomes algebra in the frequency domain pro-vided that a few key facts are recalled about the Laplace trans-form, e.g.,
Lhea#i(s) =
1s � a
for all complex numbers a. In the special case that a = 0, weobtain
L⇥u(#)
⇤(s) =
1s
.

lecture notes, me 340 73
Example 35. For a unit pulse,
L
u(#)� u(# � D)D
�(s) =
1D
Z D
0e�st dt =
1 � e�Ds
Ds(239)
By l’Hospital’s rule,
limD!0
1 � e�Ds
Ds= 1 (240)
We represent this observation by the definition L⇥d(#)
⇤(s) := 1.
If f (t) is piecewise continuous and | f (t)| Meat for all t � 0 andsome M > 0, then the integral
F(t) :=Z t
0f (t)dt (241)
is continuous and differentiable with F(0) = 0, F0(t) = f (t), and|F(t)| M0eat for all t � 0, the same a, and some M0 > 0.
The Laplace transform L [F(#)] (s) is finite, provided that the realpart of s is greater than a, and is given by
Z •
0F(t)e�st dt = �1
sF(t)e�st
����•
0+
1s
Z •
0F0(t)e�st dt (242)
or, in other words,
LZ #
0f (t)dt
�(s) =
1sL⇥
f (#)⇤(s). (243)
As illustrated in the figure below, the action of a zero-initial-valueintegrator is equivalent to multiplication by 1/s.
R t0
i(t) o(t)1s
L⇥i(#)
⇤(s) L
⇥o(#)
⇤(s)
Time domain: Frequency domain: Figure 34: An integrator represented inthe time domain and in the frequencydomain
Example 36. Note thatZ t
0f (t)dt =
Z t
0u(t � t) f (t)dt =
✓u(#) ⇤ f (#)
◆(t). (244)
Since L⇥u(#)
⇤(s) = 1/s, it follows from (243) that
L✓
u(##) ⇤ f (##)◆(#)�(s) = L
⇥u(#)
⇤(s) · L
⇥f (#)
⇤(s) (245)
i.e., convolution with the unit step in the time domain is equivalent to mul-tiplication by the Laplace transform of the unit step in the frequency do-main.

lecture notes, me 340 74
We generalize the result of Example 36 by considering the Laplace
transform of the convolution✓
f (#) ⇤ g(#)◆(t), i.e.,
L✓
f (##) ⇤ g(##)◆(#)�(s) =
Z •
0e�st
✓Z t
0f (t � t)g(t)dt
◆dt
=Z •
0
Z t
0e�st f (t � t)g(t)dt dt (246)
t = t
t
t
dt
t = t
dt
t
t Figure 35: Integration over vertical orhorizontal strips.
By changing order of integration, as suggested in the figure above,we get
Z •
0
Z •
te�st f (t � t)g(t)dt dt =
(t = t + t0
dt = dt0
)
=Z •
0
Z •
0e�s(t+t0) f (t0)g(t)dt dt0
=Z •
0e�st0 f (t0)dt0
Z •
0e�st g(t)dt. (247)
By the convolution theorem,
L✓
f (##) ⇤ g(##)◆(#)�(s) = L
⇥f (#)
⇤(s) · L
⇥g(#)
⇤(s).
the response of a dynamic system consisting of amplifiers,zero-initial-value integrators, summing junctions, and split-ting junctions, can be written in terms of a convolution withthe input.
Example 37. Recall that for a zero-initial-value integrator with feedback theoutput o(t) is given by the convolution
�i(#) ⇤ e�a#�(t). It follows that
L⇥o(#)
⇤(s) = L
⇥i(#)
⇤(s) · 1
s � (�a). (248)
As illustrated in the figure below, the action of a zero-initial value integratorwith feedback is thus equivalent to multiplication by 1/(s + a).

lecture notes, me 340 75
R t0 •
a
i(t) + o(t)
�
Time domain:
Frequency domain:
1s+a
L⇥i(#)
⇤(s) L
⇥o(#)
⇤(s)
Figure 36: A representation of a zero-initial-value integrator with negativefeedback in the time and frequencydomains.
In-class worksheet: transfer functions
The action of a SISO dynamical system consisting of amplifiers, zero-initial-value integrators, splitting and summing junctions is equiva-lent to multiplication by some function H(s) known as the transferfunction. Such a dynamical system is called a convolution, since
L⇥o(#)
⇤(s) = L
⇥i(#)
⇤(s) · H(s) (249)
implies that
o(t) =✓
i(#) ⇤ h(#)◆(t) (250)
for some function h(t), where H(s) = L⇥h(#)
⇤(s).
⇤h(t)i(t) o(t)
or H(s)L⇥i(#)
⇤(s) L
⇥o(#)
⇤(s) Figure 37: A convolution system rep-
resented in the time domain by convo-lution with the unit impulse responseh(t) or in the frequency domain bymultiplication with the transfer functionH(s).
Suppose that h(t) is differentiable. Then, Taylor’s theorem impliesthat there exists a function g, such that
h(t � t) = h(t) +dhdt
(t)t + g(t � t)t (251)
and limt!0 g(t � t) = 0. For t > D, it follows that✓
u(#)� u(# � D)D
⇤ h(#)◆(t)
=1D
Z D
0
✓h(t) +
dhdt
(t)t + g(t � t)t
◆dt
= h(t) +dhdt
(t)D2+
1D
Z D
0g(t � t)t dt (252)

lecture notes, me 340 76
or, in other words,
limD!0
✓u(#)� u(# � D)
D⇤ h(#)
◆(t) = h(t) (253)
It follows that h(t) is the unit impulse response of the system, andH(s) is its Laplace transform.
Example 38. The transfer function of a zero-initial-value integrator is1/s. But L
⇥u(#)
⇤(s) = 1/s. It follows that the unit impulse response of a
zero-initial-value integrator is the unit step u(t).Similarly, the transfer function of a zero-initial-value integrator with
feedback is 1/(s + a). But L⇥e�a#⇤(s) = 1/(s + a). It follows that the
unit impulse response of a zero-initial-value integrator with feedback is theexponential function e�at.
Example 39. Now consider the following equivalent block diagrams withI(s) := L
⇥i(#)
⇤(s), X(s) = L
⇥x(#)
⇤(s), and O(s) := L
⇥o(#)
⇤(s).
R t0 •
x(t) R t0 •
a
b
i(t)+ o(t)
�
�
1s •
X(s)1s •
a
b
I(s)+ O(s)
�
�
Figure 38: Alternative block diagramrepresentations of a double integra-tor with feedback show that it is aconvolution.
It follows that
O(s) =1s
X(s), X(s) =1s�
I(s)� aX(s)� bO(s)�
(254)

lecture notes, me 340 77
from which we obtain
s2O(s) + asO(s) + bO(s) = I(s) (255)
or, in other words,O(s) =
1s2 + as + b
I(s). (256)
As suggested in the figure below, the system is thus equivalent to a con-volution with transfer function
H(s) =1
s2 + as + b(257)
1s2+as+b
I(s) O(s) Figure 39: The equivalent transferfunction representation of a doublezero-initial-value integrator withfeedback.
In Lesson 5, we use convolution integrals to compute the correspondingimpulse response.
Example 40. Now consider the following block diagram.
1s •
b
a
I(s)++
O(s)
�
+
Figure 40: A zero-initial-value integra-tor with feedback and feedforward is aconvolution.
Let I(s) := L⇥i(#)
⇤(s) and O(s) := L
⇥o(#)
⇤(s). It follows that
O(s) = bI(s) +1s�
I(s)� aO(s)�
(258)
from which we obtain
O(s) =b + 1
s1 + a
sI(s) =
bs + 1s + a
I(s) (259)
As suggested in the figure below, the system is thus equivalent to a convolu-tion with transfer function
H(s) =bs + 1s + a
= b +1 � ab
s + a. (260)

lecture notes, me 340 78
bs+1s+a
I(s) O(s) Figure 41: The equivalent transferfunction representation of an integratorwith feedback and feedforward.
SinceH(s) = L
bd(#) + (1 � ab)e�a#
�(s), (261)
it follows that the unit impulse response is given by an impulse scaled by b
added to an exponentially decaying signal with initial value 1 � ab and timeconstant a�1.
Consider, again, the multilayered mechanical suspension shownin the figure below, and its representation by the double integratorblock diagram shown in Figure 43 on the next page.
f (t)i
k1
k2
x1
x2
id1
d2
Figure 42: A multilayered suspension.
Let F(s) := L⇥
f (#)⇤(s), X1(s) := L
⇥x1(#)
⇤(s), and X2(s) :=
L⇥x2(#)
⇤(s). Figure 44 below shows an alternative frequency-domain
block-diagram representation of the suspension in the case of zeroinitial values. In this case, it follows that
X1(s) =k2�X2(s)� X1(s)
�� k1X1(s)
d1s(262)
and
X2(s) =F(s)� k2
�X2(s)� X1(s)
�
d2s(263)
After solving for X1(s) and X2(s), we obtain
X1(s) =k2F(s)
d1d2s2 + (d2k1 + d1k2 + d2k2)s + k1k2= H1(s)F(s) (264)

lecture notes, me 340 79
and
X2(s) =(d2s + k1 + k2)F(s)
d1d2s2 + (d2k1 + d1k2 + d2k2)s + k1k2= H2(s)F(s) (265)
in terms of the transfer functions H1(s) and H2(s).
•
x2(0) +R t
0 •
• x1(t)x1(0) +R t
0
k2
k1
1d2
1d1
f (t) + x2(t)
+
�
+
�
�
Figure 43: An equivalent block diagramin the time domain.
•
1s •
• X1(s)1s
k2
k1
1d2
1d1
F(s) + X2(s)
+
�
+
�
�
Figure 44: An equivalent block diagramin the frequency domain.

lecture notes, me 340 80
A frequency-domain representation of this single-input-two-outputdynamical system is shown below.
H1(s)
H2(s)
F(s)X1(s)
X2(s)
Figure 45: The equivalent transfer func-tion representation of the multilayeredsuspension.
In-class worksheet – Liquid-level systems
Let y (t) denote the liquid level at time t of a tank of constant cross-sectional area C. Suppose that the fluid flow rate into the tank is qi (t)and that the fluid flow rate out of the tank is qo (t). By the principleof conservation of mass
ddt
(rCy) = rqi � rqo, (266)
since an increase in the amount of mass inside the tank must beaccompanied by a larger flow rate of mass per unit time into the tankthan out of the tank.
pa
qo Ro
pa
Cg
yqi
Figure 46: A single-tank liquid-levelsystem.
Assume that the mass flow rate out of the tank through a valve isproportional to the pressure drop across the valve:
rqo =DpRo
, (267)
where Ro is the resistance of the output valve. Then, if the pressuredrop equals the difference between the ambient atmospheric pressurepa and the pressure at the bottom of the tank pa + rgy, it follows thatDp = rgy and thus
ddt
(rCy) = rqi �rgRo
y. (268)

lecture notes, me 340 81
This can be written as
dydt
(t) +1T
y(t) =1C
qi(t), (269)
where the time constantT =
CRog
. (270)
If y(0) = y0, then
y(t) = y0e�t/T +1C
✓qi(#) ⇤ e�#/T
◆(t). (271)
If we consider qi(t) as the input and y(t) as the output, then fory(0) = 0, the system is a convolution with transfer function
H(s) =1C
TsT + 1
. (272)
An equivalent block diagram is shown below.
1C
TsT+1
L⇥qi(#)
⇤(s) L
⇥y(#)
⇤(s) Figure 47: The equivalent transfer func-
tion representation of the relationshipbetween the input fluid flow rate andthe liquid level.
Example 41. The unit impulse response of the single-tank liquid levelsystem considered above is the signal whose Laplace transform equals thetransfer function, namely
y(t) =1C
e�t/T , (273)
which also equals the free response (in the absence of input) given an initialcondition y(0) = 1/C.
Example 42. The unit step response of the single-tank liquid level systemconsidered above is the signal whose Laplace transform equals
1s
1C
TsT + 1
=TC
✓1s� T
sT + 1
◆(274)
or, in other words,y(t) =
TC
⇣1 � e�t/T
⌘(275)
for t � 0. In particular, y (t) ! T/C = Ro/g as t ! • corresponding toa steady-state level of the liquid in the tank, as the amount of liquid flowinginto the tank equals that flowing out of the tank.
We replace the open inlet with a pump that raises the ambientpressure by dp(t), and an inlet valve with resistance Ri connected tothe bottom of the tank, as shown in the figure below.

lecture notes, me 340 82
pa
qi Ri
pa
C
dp
g
y
Ro qo
Figure 48: A single-tank liquid-levelsystem with a pump.
In this case,ddt
(rCy) = rqi � rqo, (276)
whererqi =
dp � rgyRi
(277)
andrqo =
rgyRo
, (278)
so thatdydt
(t) +1T
y(t) =1
rCRidp(t), (279)
where the time constant
T =CRiRo
g(Ri + Ro). (280)
If y(0) = h0, then
y(t) = y0e�t/T +1
rCRi
✓dp(#) ⇤ e�#/T
◆(t). (281)
If we consider dp(t) as the input and y(t) as the output, then fory(0) = 0, the system is a convolution with transfer function
H(s) =1
rCRi
TsT + 1
. (282)
An equivalent block diagram is shown below.
1rCRi
TsT+1
L⇥dp(#)
⇤(s) L
⇥y(#)
⇤(s) Figure 49: The equivalent transfer func-
tion representation of the relationshipbetween the pressure differential acrossthe pump and the liquid level.
Example 43. We consider the two-tank liquid-level system shown on thenext page. If y1(0) = 0, then the analysis of the single-tank liquid-level sys-tem in Fig. 48 shows that the relationship between the pressure differential

lecture notes, me 340 83
pa
qi R1
pa
C1
dp
g
y1
R2
pa
qo R3
pa
C2
y2
Figure 50: A coupled liquid-levelsystem of two tanks.
across the pump and the liquid height in the first tank is a convolution withtransfer function
H1(s) =1
rC1R1
T1sT1 + 1
, (283)
whereT1 =
C1R1R2g(R1 + R2)
(284)
Similarly, if y2(0) = 0, then the analysis of the single-tank liquid-levelsystem in Fig. 46 shows that the relationship between the fluid flow rate intothe second tank and the liquid height in the second tank is a convolutionwith transfer function
H2(s) =1
C2
T2sT2 + 1
, (285)
whereT2 =
C2R3g
. (286)
Finally, Eq. (278) implies that the relationship between the liquid height inthe first tank and the fluid flow rate into the second tank is a convolutionwith transfer function
H1�2(s) =g
R2. (287)
The coupled liquid-level system may now be represented by the blockdiagram below.

lecture notes, me 340 84
1rC1R1
T1sT1+1 •
L⇥y1(#)
⇤(s)
gR2
•
L⇥qi(#)
⇤(s)
1C2
T2sT2+1
L⇥dp(#)
⇤(s) L
⇥y2(#)
⇤(s)
Figure 51: The equivalent transfer func-tion representation of the relationshipbetween the pressure differential acrossthe pump, the liquid level in each of thetanks, and the flow rate into the secondtank.
The input-output relationship between the pressure differential across thepump and the liquid height in the second tank is therefore a convolutionwith transfer function
H(s) =1
rC1R1
T1sT1 + 1
gR2
1C2
T2sT2 + 1
(288)
or, in other words,
H(s) =g
rC1R1C2R2
T1T2(sT1 + 1)(sT2 + 1)
(289)
This is the transfer function of a sequential wiring of two zero-initial-valueintegrators with negative feedback followed by (or preceded by) amplifica-tion.
Exercises
1. Consider the following block diagram in the time domain.
R t0 •1
2
i(t)+ o(t)�
Draw a corresponding diagram in the frequency domain andexpress L
⇥o(#)
⇤(s) in terms of L
⇥i(#)
⇤(s).
2. Consider the following block diagram in the time domain.
R t0 •
y(t) R t0 •
3
2
i(t) + + o(t)
��

lecture notes, me 340 85
Draw a corresponding diagram in the frequency domain andexpress L
⇥o(#)
⇤(s) in terms of L
⇥i(#)
⇤(s).
3. Consider the following block diagram in the time domain.
•
R t0 •
• y(t)R t
0
2
12
i(t) + o(t)
+
�
�
Draw a corresponding diagram in the frequency domain andexpress L
⇥o(#)
⇤(s) in terms of L
⇥i(#)
⇤(s).
4. Suppose that a 6= b and compute the Laplace transform
L
ea# � eb#
a � b
�(s)
5. Compute the Laplace transforms
L⇥
sin w#⇤(s), L
⇥cos w#
⇤(s)
Verify that your result agrees with (243).
6. Use (243) to show that
L⇥#n⇤(s) = n!
sn+1 ,
provided that the real part of s is greater than 0.
7. Show that
L⇥#n f (#)
⇤(s) = (�1)n dn
dsn L⇥
f (#)⇤(s)
and use the result to show that
L⇥#n⇤(s) = n!
sn+1 ,
provided that the real part of s is greater than 0.
8. Compute the Laplace transform
Lh#e#i(s)

lecture notes, me 340 86
9. Show that
L⇥
f (# � D)u(# � D)⇤(s) = e�sDL
⇥f (#)u(#)
⇤(s).
and illustrate the result using block diagrams in the time andfrequency domains.
10. Suppose that
L⇥o(#)
⇤(s) =
1s(s + 2)
L⇥i(#)
⇤(s)
Find an expression for o(t) in terms of a convolution with i(t).
11. Suppose that
L⇥o(#)
⇤(s) =
s + 1s2 + 1
L⇥i(#)
⇤(s)
Draw a corresponding frequency-domain block diagram.
12. Suppose that
L⇥o(#)
⇤(s) =
1 + sb
s + aL⇥i(#)
⇤(s)
Find an expression for o(t) in terms of a convolution with i(t).
13. Find the unit impulse response corresponding to the transfer func-tion
H(s) =s � 1
(s � 2)(s � 3)=
2s � 3
� 1s � 2
14. Suppose that the unit impulse response of a convolution dynami-cal system equals tet. Find the Laplace transform of the unit stepresponse.
•
Solutions
1. A corresponding frequency-domain block diagram is given below.
1s •1
2
L⇥i(#)
⇤(s) + L
⇥o(#)
⇤(s)
�
Here,
L⇥o(#)
⇤(s) =
12s
✓L⇥i(#)
⇤(s)� L
⇥o(#)
⇤(s)◆
or, in other words,
L⇥o(#)
⇤(s) =
11 + 2s
L⇥i(#)
⇤(s).

lecture notes, me 340 87
2. A corresponding frequency-domain block diagram is given below.
1s •
L⇥y(#)
⇤(s)
1s •
3
2
L⇥i(#)
⇤(s) + + L
⇥o(#)
⇤(s)
��
Here,
L⇥o(#)
⇤(s) =
1s
✓L⇥y(#)
⇤(s)� 2L
⇥o(#)
⇤(s)◆
L⇥y(#)
⇤(s) =
1s
✓L⇥i(#)
⇤(s)� 3L
⇥y(#)
⇤(s)◆
or, in other words,
L⇥o(#)
⇤(s) =
1(s + 2)(s + 3)
L⇥i(#)
⇤(s)
3. A corresponding frequency-domain block diagram is shown be-low.
•
1s •
• L⇥y(#)
⇤(s)1
s
2
12
L⇥i(#)
⇤(s) + L
⇥o(#)
⇤(s)
+
�
�
Here,
L⇥o(#)
⇤(s) =
12s
✓L⇥i(#)
⇤(s)� 2
✓L⇥o(#)
⇤(s)� L
⇥y(#)
⇤(s)◆◆
L⇥y(#)
⇤(s) =
2s
✓L⇥o(#)
⇤(s)� L
⇥y(#)
⇤(s)◆
or, in other words,
L⇥o(#)
⇤(s) =
s + 22s(s + 3)
L⇥i(#)
⇤(s)

lecture notes, me 340 88
4. Since L⇥ea#⇤(s) = 1/(s � a),
L
ea# � eb#
a � b
�(s) =
1s�a � 1
s�b
a � b=
1(s � a)(s � b)
5. Since sin wt = (ejwt � e�jwt)/j2,
L⇥
sin w#⇤(s) =
1s�jw � 1
s+jw
j2=
w
s2 + w2
Similarly, since cos wt = (ejwt + e�jwt)/2,
L⇥
cos w#⇤(s) =
1s�jw + 1
s+jw
2=
ss2 + w2
Since,L⇥
sin w#⇤(s) =
w
sL⇥
cos w#⇤(s)
this agrees with (243).
6. Recall that L⇥1⇤(s) = 1/s, provided that the real part of s is greater
than 0. With f (t) = ntn�1, it follows from (243) that
L⇥#n⇤(s) = n
sLh#n�1
i(s)
and, consequently, that
L⇥#n⇤(s) = n
sn � 1
sLh#n�2
i(s) = · · · = n!
sn+1 .
7. Here,
(�1)n dn
dsn L⇥
f (#)⇤(s) = (�1)n dn
dsn
Z •
0f (t)e�st dt
= (�1)nZ t
0(�t)n f (t)e�st dt
or in other words,
L⇥#n f (#)
⇤(s) = (�1)n dn
dsn L⇥
f (#)⇤(s).
In particular, if f (t) = u(t), then
L⇥#n⇤(s) = (�1)n dn
dsn1s=
n!sn+1 .
8. From the previous result,
Lh#e#i(s) = � d
ds1
s � 1=
1(s � 1)2 .

lecture notes, me 340 89
9. The claim follows from the observation that
L⇥
f (# � D)u(# � D)⇤(s) =
Z •
Df (t � D)u(t � D)e�st dt
= e�sDZ •
0f (t)u(t)e�st dt,
where t = t � D. As illustrated below, the action of a delay linewith delay D is thus equivalent to multiplication by the exponen-tial e�sD.
i(t) o(t)De�Ds
L⇥i(#)
⇤(s) L
⇥o(#)
⇤(s)
Time domain: Frequency domain:
10. Since1
s(s + 2)=
12
✓1s� 1
s + 2
◆=
12L
1 � e�2#�(s),
it follows that
o(t) =12
✓⇣1 � e�2#
⌘⇤ i(#)
◆(t).
11. Let O(s) = L⇥o(#)
⇤(s) and I(s) = L
⇥i(#)
⇤(s) so that
(s2 + 1)O(s) = (s + 1)I(s) , O(s) =1s2�
I(s)� O(s)�+
1s
I(s).
Then,
Y(s) =1s�
I(s)� O(s)�) O(s) =
1s�Y(s) + O(s)
�+ Y(s).
A corresponding block diagram is shown below.
1s •
Y(s)
1s •
•
I(s) + +
+�
+ O(s)+
12. Since1 + sb
s + a= b +
1 � ab
s + a= L
hbd(#) + (1 � ab)e�a#
i(s),
it follows that
o(t) = bi(t) + (1 � ab)
✓e�a# ⇤ i(#)
◆(t).

lecture notes, me 340 90
13. Since2
s � 3� 1
s � 2= L
⇥2e3# � e2#](s),
the unit impulse response equals 2e3t � e2t.
14. Since the corresponding transfer function equals
L⇥#e#⇤(s) = 1
(s � 1)2 ,
the Laplace transform of the unit step response is given by
1s(s � 1)2 .

lecture notes, me 340 91
Lesson 5 – Inverse Laplace transforms
TAKE-AWAYS:
* The transfer function
H(s) =1
s2 + as + b=
1(s � g1)(s � g2)
has poles at s = g1 and s = g2. The corresponding dynamicsystem is overdamped if a2 > 4b, in which case g1 and g2 arereal and unequal; critically damped if a2 = 4b, in which caseg1 and g2 are real and equal; and underdamped if a2 < 4b, inwhich case g1 and g2 are conjugate complex numbers.
* If h(t) is the unit impulse response corresponding to thetransfer function H(s), then sH(s) is the Laplace transformof the distributional derivative Dh(t)/dt of h(t)u(t). If h(t) iscontinuous and differentiable for all t > 0, then for t � 0
Dhdt
(t) =dhdt
(t) + d(t) limt#0
h(t).
For example,Ddt
e�at = �ae�at + d(t).
If limt#0 h(t) = 0, then sH(s) is the Laplace transform of thederivative of h(t).
* If the function H(s) is a ratio of two polynomials in s, thenthe corresponding inverse Laplace transform can be computedusing convolution integrals and distributional derivatives.

lecture notes, me 340 92
Online lecture: second-order responses
The transfer function for a double zero-initial-value integratorwith negative feedback is given by
H(s) =1
s2 + as + b=
1s � g1
1s � g2
(290)
where
g1,2 := �a
2±r
a2
4� b (291)
and a, b > 0. We say that the system has poles8 at s = g1 and s = g2, 8 The poles are points in the complexplane, where the denominator equals 0.respectively.
Recall thatLhe�a#
i(s) =
1s + a
(292)
It follows that
H(s) = Lheg1#
i(s) · L
heg2#
i(s) (293)
By the convolution theorem, the unit impulse response h(t) is thengiven by
✓eg1# ⇤ eg2#
◆(t) =
Z t
0eg1teg2(t�t) dt = eg2t
Z t
0e(g1�g2)t dt (294)
or, in other words,
h(t) =eg1t � eg2t
g1 � g2(295)
provided that g1 6= g2, and
h(t) = tegt (296)
if g1 = g2 = g.
Example 44. A double zero-initial-value integrator with negative feedbackis overdamped if a2 > 4b. In this case, g1 and g2 are real, negative, anddistinct.
t
h(t) = e�at/2 sinh(p
a2/4�b t)pa2/4�b
Figure 52: The unit impulse responseof an overdamped double zero-initial-value integrator with negative feedback.
The unit impulse response shows an initial increase from zero and asubsequent decrease back to zero without any overshoot.

lecture notes, me 340 93
Example 45. A double zero-initial-value integrator with negative feedbackis underdamped if a2 < 4b. In this case, g1 and g2 are complex conjugatenumbers with negative real part given by �a/2 and imaginary part givenby ±
pb � a2/4. Substitution then yields
h(t) = e�at/2 sin(p
b � a2/4 t)pb � a2/4
(297)
where we recall that sin x = (ejx � e�jx)/j2.
t
h(t) = e�at/2 sin(p
b�a2/4 t)pb�a2/4
Figure 53: The unit impulse responseof an underdamped double zero-initial-value integrator with negative feedback.
The unit impulse response is an exponentially decaying harmonicsignal with initial amplitude
1pb � a2/4
(298)
time constant 2/a, angular frequencyp
b � a2/4, and no phase shift.
Example 46. A double zero-initial-value integrator with negative feedbackis critically damped if a2 = 4b. In this case, g1 = g2 = �a/2. The unitimpulse response is given by
h(t) = te�at/2. (299)
t
h(t) = te�at/2
Figure 54: The unit impulse responseof a critically damped double zero-initial-value integrator with negativefeedback.
The unit step response of a critically damped double zero-initial-value

lecture notes, me 340 94
t
4/a2
✓h(#) ⇤ u(#)
◆(t)
Figure 55: The unit step response of acritically damped double zero-initial-value integrator with negative feedback.
integrator with negative feedback is then given by✓
h(#) ⇤ u(#)◆(t) =
Z t
0te�at/2u(t � t)dt
= �2e�at/2(at + 2)a2
����t
0(300)
or, in other words,✓
h(#) ⇤ u(#)◆(t) =
4 � 2e�at/2(at + 2)a2 (301)
whose Laplace transform equals H(s)/s.
In-class worksheet: distributional derivatives
Suppose that h(t) is the impulse response of a convolution corre-sponding to the transfer function H(s). Then, sH(s) is the Laplacetransform of the distributional derivative9 Dh(t)/dt of h(t)u(t).
9 For piecewise-continuous functions,the distributional derivative equalsthe regular derivative at points ofcontinuity plus unit impulses shifted topoints of discontinuity and scaled bythe size of the discontinuities.
Example 47. The function h(t) = e�atu(t) is the unit impulse responseof a convolution corresponding to the transfer function H(s) = 1/(s + a).But,
sH(s) =s
s + a= 1 � a
s + a= L
hd(#)� ae�a#
i(s) (302)
We conclude that, for t � 0,
Ddt
e�at = d(t)� ae�at. (303)
This equals the regular derivative of h(t) plus a unit impulse at t = 0corresponding to the discontinuous jump from 0 to e�a0 = 1. The specialcase when a = 0 in (303) implies that, for t � 0,
Ddt
u(t) = d(t). (304)
Since sin wt = (ejwt � e�jwt)/j2, substitution of a = ±jw on theright-hand side of (303) implies that
d(t) + jw · ejwt � d(t) + jw · e�jwt
j2= w · ejwt + e�jwt
2(305)

lecture notes, me 340 95
or, in other words, for t � 0,
Ddt
sin wt = w cos wt (306)
i.e., the regular derivative of sin wt for all t. Since L⇥
sin w#⇤(s) =
w/(s2 + w2), it follows that the Laplace transform of cos wt equalssw
w
s2 + w2 =s
s2 + w2 (307)
In contrast,
d(t) + jw · ejwt + d(t)� jw · e�jwt
2= d(t)� w · ejwt � e�jwt
j2(308)
or, in other words, for t � 0,
Ddt
cos wt = d(t)� w sin wt, (309)
i.e., the regular derivative of cos wt plus a unit impulse at t = 0 correspond-ing to the discontinuous jump from 0 to cos(0) = 1.
Example 48. The Laplace transform of the convolution✓⇣
d(#)� ae�a#⌘⇤ e�a#
◆(t) = e�at � ate�at (310)
equalss
s + a
1s + a
=s
(s + a)2 (311)
It follows that, for t � 0,
Ddt
te�at = e�at � ate�at (312)
i.e., the regular derivative of te�at.
Example 49. Consider the transfer function
H(s) =s2 + s � 2
s3 + 5s2 + 7s + 3=
s2 + s � 2(s + 1)2(s + 3)
(313)
corresponding to the block diagram on the next page. We obtain the corre-sponding Inverse Laplace Transform by several successive convolutionintegrals, as follows
L�1
1(# + 1)2
�(t) =
⇣e�# ⇤ e�#
⌘(t) = te�t. (314)
L�1
1(# + 1)2(# + 3)
�(t) =
⇣#e�# ⇤ e�3#
⌘(t)
=Z t
0te�te�3(t�t) dt
=14
⇣e�3t + 2te�t � e�t
⌘(315)

lecture notes, me 340 96
1s • 1
s • 1s • 2
5
7
3
1
1
I(s) +
�O(s)
+
+
+
+
+
+
�
+
Figure 56: A template block diagramfor rational transfer functions.
whose first and second distributional derivatives equal
d(t)� 3e�3t � 2te�t + 2e�t � d(t) + e�t
4=
�3e�3t � 2te�t + 3e�t
4(316)
and
�3d(t) + 9e�3t + 2te�t � 2e�t + 3d(t)� 3e�t
4=
9e�3t + 2te�t � 5e�t
4(317)
The corresponding unit impulse response then equals
14
⇣9e�3t + 2te�t � 5e�t
⌘+
14
⇣�3e�3t � 2te�t + 3e�t
⌘
� 214
⇣e�3t + 2te�t � e�t
⌘= e�3t � te�t (318)
as is also easily verified from the definition of the Laplace transform.
Example 50. Consider a block diagram representing a convolution with anintegrator in the feedback loop.
Here,
X(s) =1s
O(s), O(s) =1s
✓I(s)� 3O(s)� 2X(s)
◆(319)
from which we obtain
s2O(s) + 3sO(s) + 2O(s) = sI(s). (320)
The system is thus equivalent to a convolution with transfer function
H(s) =s
s2 + 3s + 2(321)

lecture notes, me 340 97
1s •
X(s)1s
3
2
I(s) + O(s)
�
�
Figure 57: A convolution with anintegrator in the feedback loop.
We obtain the corresponding unit impulse response by computing the dis-tributional derivative of the unit impulse response corresponding to thetransfer function 1/
�s2 + 3s + 2
�.
In-class worksheet: initial-value problems
For t � 0, the output of an integrator with initial value c is given by
o(t) = c +Z t
0i(t)dt = cu(t) +
✓i(#) ⇤ u(#)
◆(t) (322)
With O(s) = L⇥o(#)
⇤(s) and I(s) = L
⇥i(#)
⇤(s),
O(s) =cs+
I(s)s
=c + I(s)
s. (323)
When I(s) = 0, the output equals the free response. When c = 0and I(s) = 1, the output equals the unit impulse response. Thefree response is always a multiple of the unit impulse response andequals the unit impulse response when c = 1.
c +R t
0
i(t) o(t)
c
1s
I(s) + O(s)+
Time domain: Frequency domain:Figure 58: An integrator with initialvalue represented in the time domainand frequency domains.
Example 51. The figure on the next page shows two representations of anonzero-initial-value integrator with negative feedback. In this case,
O(s) =1s�c + I(s)� aO(s)
�(324)

lecture notes, me 340 98
c +R t
0 •
a
i(t) + o(t)
�
Time domain:
Frequency domain:
c
1s •
a
I(s) + O(s)
�
+
Figure 59: A nonzero-initial-valueintegrator with negative feedbackrepresented in the time and frequencydomains.
or, in other words,
O(s) =c + I(s)
s + a. (325)
When I(s) = 0, the output equals the free response. When c = 0 andI(s) = 1, the output equals the unit impulse response. The free response isalways a multiple of the unit impulse response and equals the unit impulseresponse when c = 1.
Example 52. The figure on the next page shows two representations of adouble nonzero-initial-value integrator with negative feedback. In this case,
O(s) =1s�d + X(s)
�, X(s) =
1s�c + I(s)� aX(s)� bO(s)
�(326)
or, in other words,
O(s) =ds + c + da + I(s)
s2 + as + b(327)
When I(s) = 0, the output equals the free response. When c = 0 andI(s) = 1, the output equals the unit impulse response. The free response is alinear combination of the unit impulse response of the transfer function
1s2 + as + b
(328)
and its distributional derivative, and equals the unit impulse response whenc = 1 and d = 0.

lecture notes, me 340 99
c +R t
0 •x(t)
d +R t
0 •
a
b
i(t)+ o(t)
�
�
Time domain:
1s
c
•X(s)
d
1s •
a
b
I(s) +
+
+
+
+ O(s)
�
�
Frequency domain:
Figure 60: A double nonzero-initial-value integrator with negative feedbackrepresented in the time and frequencydomains.
Exercises
1. Consider the mechanical suspension shown below.
2 kg
f (t)i
3 N/m
x m
i0.1 Ns/m

lecture notes, me 340 100
Use a free-body diagram and Newton’s 2nd law to derive a differ-ential equation governing x(t) and determine whether the systemis overdamped, underdamped, or critically damped. Graph thecorresponding unit impulse response.
2. Explain why the unit impulse response of an overdamped systemis a nonnegative function of time.
3. Use a frequency-domain block diagram representation of theinitial-value problem
dodt
(t) = e�t cos 2pt, o(0) = �1
to find the Laplace transform of its solution.
4. Use a frequency-domain block diagram representation of theinitial-value problem
dodt
(t) + 2o(t) = te�t/2, o(0) = 1
to find the Laplace transform of its solution.
5. Use a frequency-domain block diagram representation of theinitial-value problem
d2odt2 (t) + 3
dodt
+ 2o(t) = u(t)� u(t � 1), o(0) = 1,dodt
(0) = 3
to find the Laplace transform of its solution.
6. Solve the initial-value problem
d2odt2 (t) + 2
dodt
+ o(t) = 0, o(0) = 3,dodt
(0) = �1.
7. Determine the initial values for which the free response of a dou-ble integrator with negative feedback equals the unit impulseresponse.
8. Find the inverse Laplace transform of the function
4s2 + 4s + 54s3 + 12s2 + 9s + 2
=4s2 + 4s + 5
(2s + 1)2(s + 2).
9. Find the inverse Laplace transform of the function
1 + sb
s + a.
•

lecture notes, me 340 101
Solutions
1. Consider the following free-body diagram, where x = dx/dt.
�3xi N �0.1xi N
f (t)i N
Using Newton’s 2nd law, we obtain the differential equation
2d2xdt2 (t) + 0.1
dxdt
(t) + 3x(t) = f (t)
and the equivalent representation as a double integrator withnegative feedback shown below.
1s • 1
s •
5100
32
12
F(s) + X(s)
��
It follows thatX(s) =
F(s)2
1s2 + 0.05s + 1.5
,
which is underdamped. The graph of the corresponding unitimpulse response
h(t) =12
e�t/40 sin(p
2399/40t)p2399/40
is shown in the diagram below.
t
30 60 90
0.5
�0.5

lecture notes, me 340 102
2. For an overdamped system with distinct poles at g1 and g2, theunit impulse response equals
h(t) =eg1t � eg2t
g1 � g2.
In particular, h(0) = 0, h0(0) = 1, and h(t) = 0 , e(g1�g2)t = 1,which is only true for t = 0.
3. Since
Lhe�# cos 2p#
i(s) =
s + 1(s + 1)2 + 4p2 ,
it follows that
�1
1s
s+1(s+1)2+4p2 + O(s)+
or, in other words,
O(s) = � s2 + s + 4p2
s3 + 2s2 + s(1 + 4p2).
4. Since,
Lh#e�#/2
i(s) =
4(2s + 1)2 ,
it follows that
1
1s •
2
4(2s+1)2 + O(s)
�
+
or, in other words,
O(s) =4s2 + 4s + 5
4s3 + 12s2 + 9s + 2.
5. Since
L⇥u(#)� u(# � 1)
⇤(s) =
1 � e�s
s,
it follows that

lecture notes, me 340 103
1s
3
•X(s)
1
1s •
3
2
1�e�s
s +
+
+
+
+ O(s)
�
�
or, in other words,
O(s) =s2 + 6s + 1 � e�s
s3 + 3s2 + 2s.
6. The initial-value problem is equivalent to the frequency-domainblock diagram shown below.
1s
�1
•X(s)
3
1s •
2
1
0 +
+
+
+
+ O(s)
�
�
It follows thatO(s) =
3s + 5(s + 1)2 .
SinceL⇥#e�#⇤(s) = 1
(s + 1)2 ,
the response equals
o(t) = 5te�t + 3Ddt
te�t = 2te�t + 3e�t.
7. For a double nonzero-initial-value integrator with negative feed-back,
O(s) =ds + c + da + I(s)
s2 + as + b.

lecture notes, me 340 104
The free response (when I(s) = 0) equals the unit impulse re-sponse (when c = d = 0 and I(s) = 1), provided that
ds + c + da = 1
for all s, i.e., c = 1 and d = 0.
8. Since
L�1
1(2# + 1)2
�(t) =
14
te�t/2,
it follows that
L�1
1(2# + 1)2(# + 2)
�(t) =
✓14
#e�#/2 ⇤ e�2#◆(t)
=19
e�2t +3t � 2
18e�t/2.
It we denote this function by h(t), then
L�1
4#2 + 4# + 54#3 + 12#2 + 9# + 2
�(t) = 5h(t) + 4
Ddt
h(t) + 4D2
dt2 h(t)
=139
e�2t +6t � 4
9e�t/2.
Since h(0) = dhdt (0) = 0, both distributional derivatives are simply
regular derivatives.
9. Since
L�1
1# + a
�(t) = e�at,
it follows that
L�1
1 + sb
s + a
�(t) = e�at + b
Ddt
e�at = bd(t) + (1 � ab)e�at.
In this case, the distributional derivative differs from the regularderivative, since limt#0 e�at = 1.

lecture notes, me 340 105
Lesson 6 - Modal analysis
TAKE-AWAYS:
* If there exist initial values such that the free response of adynamic system is harmonic, then the corresponding angularfrequency is a natural frequency of the system.
* When they exist, natural frequencies correspond to eigenval-ues of a matrix, whose elements are combinations of systemgains. Each corresponding eigenvector describes the modeshape associated with a natural frequency.
* Each natural frequency is associated with a modal oscilla-tion, in which representative outputs oscillate harmonicallywith the same angular frequency, and with amplitudes andphase shifts related by the corresponding mode shape.
* For mechanical systems with n masses that are coupled toeach other and to ground by springs, there are n natural fre-quencies and n distinct mode shapes. Arbitrary initial valuesresult in a free response that is a sum of modal oscillations.Such a sum is only periodic if the corresponding natural fre-quencies are rationally related.

lecture notes, me 340 106
Online lecture: natural frequencies
If the free response of a dynamic system is harmonic for somecollection of initial values, then the corresponding angular frequencyis a natural (or modal) frequency of the system.
Example 53. Consider the double integrator with feedback shown below.
1s
c
•X(s)
d
1s •
4
I(s) +
+
+
+
+ O(s)�
Figure 61: An undamped doubleintegrator with feedback.
Here,X(s) =
1s�c + I(s)� 4O(s)
�, O(s) =
1s�d + X(s)
�(329)
or, in other words,
O(s) =ds + c + I(s)
s2 + 4. (330)
Since
L⇥
sin(w#)⇤(s) =
w
s2 + w2 , L⇥
cos(w#)⇤(s) =
ss2 + w2 , (331)
it follows that
O(s) = dL⇥
cos 2#⇤(s) +
c2L⇥
sin 2#⇤(s) +
I(s)s2 + 4
. (332)
When I(s) = 0, the free response equals the harmonic signal
o(t) = d cos 2t +c2
sin 2t (333)
with angular frequency 2.
In Example 53, every free response is harmonic, and the onlynatural frequency is 2.
Example 54. Consider the mechanical suspension shown in the figureon the next page. Using Newton’s 2nd law, we obtain the correspondinginitial-value problem
md2xdt2 (t) + b
dxdt
(t) + kx(t) = 0, x(0) = x0,dxdt
(0) = v0 (334)

lecture notes, me 340 107
m
k
x
ib
~Fs = �kxi ~Fd = �b dxdt i
Free-body diagram: Figure 62: A mechanical suspension.
where m is the plate’s mass, b is the damping coefficient, k is the springstiffness, and x0 and v0 denote the initial displacement and velocity, respec-tively, of the plate. The corresponding integral equations
x(t) = x0 +Z t
0y(t)dt, y(t) = v0 �
1m
Z t
0
�by(t) + kx(t)
�dt (335)
translate into
X(s) =x0 + Y(s)
s, Y(s) =
v0 � 1m�bY(s) + kX(s)
�
s(336)
or, in other words,
X(s) =x0s + v0 +
bm x0
s2 + bm s + k
m, Y(s) =
v0s � km x0
s2 + bm s + k
m(337)
The free response is harmonic if and only if b = 0, i.e., in the absenceof damping. In this case, the natural frequency of the mechanical system isp
k/m, and
x(t) = x0 cosr
km
t + v0
rmk
sinr
km
t, (338)
y(t) = v0 cosr
km
t � x0
rkm
sinr
km
t. (339)
For b ⌧ 1, i.e., in the presence of weak damping, the free response is approx-imately harmonic with angular frequency
pk/m, but with an amplitude
that decays exponentially in time.

lecture notes, me 340 108
In-class worksheet: mode shapes
Consider the coupled, identical, double integrators with feedback,shown below. Here,
O1(s) =ds + c + I1(s)� O2(s)
s2 + 2, (340)
O2(s) =f s + e + I2(s)� O1(s)
s2 + 2(341)
or, in formal matrix form,
s2 + 2 11 s2 + 2
!·
O1(s)O2(s)
!=
ds + c + I1(s)f s + e + I2(s)
!. (342)
1s
c d
1s •
2
I1(s) +
+
+
+
+ O1(s)�
1s
e f
1s •
2
I2(s)+
+
+
+
+
O2(s)
�
�
�
Figure 63: Two coupled undampeddouble integrators with feedback.
When I1(s) = I2(s) = 0, the outputs o1(t) and o2(t) are harmonicwith angular frequency w, provided that
O1(s) =o11s + o12s2 + w2 , O2(s) =
o21s + o22s2 + w2 (343)
for some coefficients o11, o12, o21, and o22. Substitution into (342),multiplication on both sides by s2 + w2, and the requirement thatcoefficients of equal powers of s be identical on both sides of theequation, shows that o11 = d, o12 = c, o21 = f , and o22 = e. In thiscase,
O1(s)O2(s)
!=
1s2 + w2 ·
ds + cf s + e
!(344)

lecture notes, me 340 109
must be a (formal) eigenvector of
s2 + 2 11 s2 + 2
!(345)
corresponding to the (formal) eigenvalue s2 + w2, since
s2 + 2 11 s2 + 2
!· 1
s2 + w2 ·
ds + cf s + e
!=
ds + cf s + e
!. (346)
But an eigenvalue l of (345) is a solution u = l of the characteristicequation
�����s2 + 2 � u 1
1 s2 + 2 � u
����� = (s2 + 3 � u)(s2 + 1 � u) = 0, (347)
i.e., l = s2 + 3 or l = s2 + 1. For the corresponding eigenvectors⇣s t
⌘T, we find
⇣s2 + 2 � (s2 + 3)
⌘s + t = 0 ) t = s (348)
and ⇣s2 + 2 � (s2 + 1)
⌘s + t = 0 ) t = �s, (349)
respectively.We conclude that the system of two coupled double integrators
with feedback have two natural frequencies: w =p
3 and w = 1. Ifthe initial values are chosen so that f = d and e = c, associated withthe first eigenvector, then
O1(s) = O2(s) =ds + cs2 + 3
, (350)
and the free response equals
o1(t) = o2(t) = d cosp
3t +cp3
sinp
3t (351)
In this case, both outputs have identical amplitude and phase shifts.Both outputs reach their maximal and minimal values simultane-ously.
If, instead, the initial values are chosen so that f = �d and e = �c,associated with the second eigenvector, then
O1(s) = �O2(s) =ds + cs2 + 1
, (352)
and the free response equals
o1(t) = �o2(t) = d cos t + c sin t (353)

lecture notes, me 340 110
In this case, the two outputs have identical amplitude, but phaseshifts that differ by p. When one of the outputs reaches its maximalvalue, the other reaches its minimal value.
For arbitrary e and f ,
ds + cf s + e
!=
(d+ f )s+(c+e)
2(d+ f )s+(c+e)
2
!+
(d� f )s+(c�e)
2( f�d)s+(e�c)
2
!, (354)
where the first column matrix is an eigenvector of
s2 + 2 11 s2 + 2
!(355)
corresponding to the eigenvalue s2 + 3, and the second is an eigen-vector corresponding to the eigenvalue s2 + 1. It follows by linearitythat the free response of this dynamical system is a combination ofa harmonic signal with angular frequency
p3 and a harmonic sig-
nal with angular frequency 1. Such a combination is typically notperiodic, since
p3 is irrational.
Each natural frequency is associated with a mode shape, cor-responding to the relationship between the amplitudes andphase shifts of the harmonic signals associated with each out-put. In the example, the mode shapes are 1 : 1 and 1 : �1,corresponding to an in-phase and an out-of-phase mode, re-spectively.
In-class worksheet: coupled oscillators
Consider the layered mechanical suspension, shown below.Using Newton’s 2nd law, we obtain the corresponding initial-value
problem
m1d2x1dt2 (t) + k1x1(t) = �K
�x1(t)� x2(t)
�, x1(0) = d,
dx1dt
(0) = c
(356)
m2d2x2dt2 (t) + k2x2(t) = �K
�x2(t)� x1(t)
�, x2(0) = f ,
dx1dt
(0) = e
(357)
and the equivalent frequency-domain representation
X1(s) =ds + c + K
�X2(s)� X1(s)
�/m1
s2 + k1/m1, (358)
X2(s) =f s + e + K
�X1(s)� X2(s)
�/m2
s2 + k2/m2(359)

lecture notes, me 340 111
m1
m2
k1
K
x1
x2
i
k2
Figure 64: A multi-layered mechanicalsuspension.
or, in formal matrix form,
s2 + k1+Km1
� Km1
� Km2
s2 + k2+Km2
!·
X1(s)X2(s)
!=
ds + cf s + e
!. (360)
The response is a modal oscillation, in which the displacementsx1(t) and x2(t) of the two plates are harmonic with angular fre-quency w, provided that
X1(s) =x11s + x12
s2 + w2 , X2(t) =x21s + x22
s2 + w2 (361)
for some coefficients x11, x12, x21, and x22. Substitution into (360),multiplication on both sides by s2 + w2, and the requirement thatcoefficients of equal powers of s be identical on both sides of theequation, shows that x11 = d, x12 = c, x21 = f , and x22 = e. In thiscase,
X1(s)X2(s)
!=
1s2 + w2 ·
ds + cf s + e
!(362)
must be a (formal) eigenvector of
s2 + k1+Km1
� Km1
� Km2
s2 + k2+Km2
!(363)
corresponding to the (formal) eigenvalue s2 + w2. But an eigenvaluel of this matrix is a solution u = l of the characteristic equation
�����s2 + (k1 + K)/m1 � u �K/m1
�K/m2 s2 + (k2 + K)/m2 � u
����� = 0, (364)

lecture notes, me 340 112
It follows that v = l � s2 is a solution of the characteristic equation�����(k1 + K)/m1 � v �K/m1
�K/m2 (k2 + K)/m2 � v
����� = 0, (365)
This is of the form v2 � tv + d = 0, whose solutions are
v =t
2±r
t2
4� d (366)
Here, t is the sum of the diagonal elements of the matrix
(k1 + K)/m1 �K/m1�K/m2 (k2 + K)/m2
!(367)
and d is its determinant. The solutions to the characteristic equationare real and positive provided that t > 0 and 0 < d < t2/4. It followsfrom inspection that t and d are both positive. Moreover,
t2
4� d =
✓k1 + K
m1� k2 + K
m2
◆2+
4K2
m1m2(368)
which is always positive.It follows that l � s2 is real and positive for both eigenvalues
of (363). If we denote these values by w21 and w2
2, we conclude thatthe mechanical system always has two natural frequencies. Sincethe corresponding eigenvectors are also real, it follows that for eachmodal oscillation, x1(t) and x2(t) are harmonic signals with differentamplitudes but identical phase shifts, if both components of theeigenvector have the same sign (in-phase), or harmonic signals withdifferent amplitudes and phase shifts that differ by p (out-of-phase),if the components of the eigenvector are of opposite sign.
For arbitrary e and f , the column matrix
ds + cf s + e
!(369)
may be expressed as a sum of an eigenvector corresponding to w1and an eigenvector corresponding to w2. It follows by linearity thatthe free response of the system is a sum of modal oscillations withangular frequencies w1 and w2. Such a combination is periodic onlyif w1 and w2 are rationally related, i.e., if there are integers m and nsuch that mw1 = nw2.
Exercises
1. Suppose that
X(s) =5s + 6 � kX(s)
s2 + 5.
Determine k such that x(t) is harmonic with angular frequency 3.

lecture notes, me 340 113
2. Find the natural frequency of the dynamical system shown below.
1s
c
•X(s)
d
1s •
9
+ +
+ O(s)�
and express x(t) in terms of the initial values c and d.
3. Show that the dynamical system shown below has no naturalfrequencies.
1s
c
•X(s)
d
1s •
9
+
+
+ O(s)
�
4. Determine x0 and v0 such that the solution to the initial-valueproblem
md2xdt2 (t) + kx(t) = 0, x(0) = x0,
dxdt
(0) = v0
is harmonic with amplitude 2 and phase shift p/4.
5. Consider the block diagram below.
1s
c
•X(s)
d
1s •
b
I(s) +
+
+
+
+ O(s)�
Let w denote its natural frequency. Show that the transfer functionof the corresponding system with zero initial values has poles at±jw.

lecture notes, me 340 114
6. Find the (formal) eigenvalues and corresponding eigenvectors ofthe matrix
s2 + 3 �2�1 s2 + 1
!.
7. Find the relationship between the eigenvalues of the matrix
s2 + a b
g s2 + d
!.
and the roots of its determinant as a function of s. What happensin the special case that an eigenvalue equals s2 + w2 for some realnumber w?
8. The outputs of a pair of coupled, identical, double integrators withfeedback satisfy the equations
O1(s) =ds + c � aO2(s)
s2 + b,
O2(s) =f s + e � aO1(s)
s2 + b
in terms of the gains a and b and initial values c, d, e, and f . Finda condition on a and b that guarantees the existence of two naturalfrequencies.
9. Consider a mechanical system, in which two displacements x1(t)and x2(t) satisfy the coupled differential equations
d2x1dt2 (t) + 4x1(t)� 3x2(t) = 0
d2x2dt2 (t) + 12x2(t)� 3x1(t) = 0
Graph a representative free response corresponding to each of thetwo natural frequencies.
10. For the mechanical system shown below, there exist two valuesof k such that the response to f1(t) = d(t) and f2(t) = kd(t),applied to the lower and upper plate, respectively, with zero initialdisplacements and velocities equals a modal oscillation in theabsence of inputs but with nonzero initial displacements andvelocities. Find the corresponding values of k.

lecture notes, me 340 115
2 kg
2 kg
10 N/m
4 N/m
x1
x2
i
4 N/m
11. Suppose that the free response of the mechanical system shownbelow to some choice of initial conditions is harmonic in bothoutputs with period approximately equal to 1.66 s. Sketch the con-figuration of the system when the first mass reaches its maximaldisplacement in either direction, as well as when the first massis halfway between its two maximal displacements, and indicatethe elapsed time since the initial time at which both displacementequal 0.
0.5 kg
4.1 kg
1.3 N/m
5.2 N/m
x1
x2
i
12.6 N/m
12. Describe the response of the two-degree-of-freedom mechanicalsystem
m1 x1(t) = �k1x1(t) + K(x2(t)� x1(t)) + ad(t)
m2 x2(t) = �k2x2(t)� K(x2(t)� x1(t)) + bd(t)

lecture notes, me 340 116
with initial conditions x1(0) = d, x1(0) = c, x2(0) = f , x2(0) = e,and specialize to the case that m1 = m2 = 2, k1 = 10, k2 = K = 4and
(a) a = 1, b = 3, c = f = 0, d = e = 1,
(b) a = b = c = e = 0, d = f = 1,
(c) a = b = d = f = 0, c = e = �2.
•
Solutions
1. If x(t) is harmonic with angular frequency 3 then
X(s) =ds + cs2 + 9
for some constants d and c. Here,
X(s) =5s + 6
s2 + 5 + k) k = 4.
2. Here,
X(s) =1s�c � 9O(s)
�, O(s) =
1s�d + X(s)
�
or, in other words,
X(s) =cs � 9ds2 + 9
.
It follows that x(t) = c cos 3t � 3d sin 3t and the natural frequencyis 3.
3. Here,
X(s) =1s�c � 9X(s)
�, O(s) =
1s�d + X(s)
�
or, in other words,
X(s) =c
s + 9, O(s) =
ds + c + 9ds2 + 9s
No choice of c and d will result in a combination of s/(s2 + w2)
and w/(s2 + w2).
4. Here,
x(t) = x0 cosr
km
t + v0
rmk
sinr
km
t
is harmonic with amplitudeq
x20 + v2
0m/k and phase shift q,where
cos q =x0q
x20 + v2
0m/k, sin q =
v0p
m/kqx2
0 + v20m/k
.
It follows that x0 =p
2 and v0 =p
2k/m.

lecture notes, me 340 117
5. Here, w =p
b. Furthermore,
O(s) =ds + c + I(s)
s2 + b
from which we obtain the transfer function
H(s) =1
s2 + b
in the case of zero initial values. Its poles are found at s = ±jp
b.
6. The characteristic equation equals
(s2 + 3 � u)(s2 + 1 � u)� 2 = 0
and its solutions are s2 + 2 ±p
3. The corresponding eigenvectors⇣s t
⌘Tsatisfy
�s2 + 3 � (s2 + 2 +
p3)�s � 2t = 0 ) t =
1 �p
32
s
and
�s2 + 3 � (s2 + 2 �
p3)�s � 2t = 0 ) t =
1 +p
32
s,
respectively.
7. If l is an eigenvalue then u = l satisfies the characteristic equation�����
s2 + a � u b
g s2 + d � u
����� = 0.
This implies that v = l � s2 satisfies the characteristic equation�����
a � v b
g d � v
����� = 0,
which in turn means that any square root of �v is a root of thedeterminant �����
s2 + a b
g s2 + d
�����
as a function of s. In the special case that v = w2 and, conse-quently, l = s2 + w2, it follows that ±jw are two roots of thedeterminant.
8. If they exist, the natural frequencies correspond to eigenvalues ofthe matrix
s2 + b a
a s2 + b
!

lecture notes, me 340 118
In particular, l is an eigenvalue if u = l satisfies the characteristicequation �����
s2 + b � u a
a s2 + b � u
����� = 0
i.e., l = s2 + b + a or l = s2 + b � a. These are both of the forms2 + w2 for a real number w, provided that b > a.
9. Here,
X1(s) =1s
✓d +
1s�c + 3X2(s)� 4X1(s)
�◆
X2(s) =1s
✓f +
1s�e + 3X1(s)� 12X2(s)
�◆
or, in matrix form,
s2 + 4 �3�3 s2 + 12
!·
X1(s)X2(s)
!=
ds + cf s + e
!
where c = dx1dt (0), d = x1(0), e = dx2
dt (0), and f = x2(0). Thenatural frequencies w1 and w2 correspond to eigenvalues of thematrix
s2 + 4 �3�3 s2 + 12
!
i.e., to solutions u = l of the characteristic equation�����
s2 + 4 � u �3�3 s2 + 12 � u
����� = 0.
It follows that l = s2 + 3 and l = s2 + 13 and, consequently, thatw1 =
p3 and w2 =
p13.
For the corresponding eigenvectors⇣
s t⌘T
,
✓s2 + 4 �
�s2 + 3
�◆s � 3t = 0 ) s = 3t
and ✓s2 + 4 �
�s2 + 13
�◆s � 3t = 0 ) t = �3s
respectively. We conclude that w1 corresponds to an in-phasemode shape 3 : 1, for which
x1(t) = 3 cosp
3t
x2(t) = cosp
3t
if c = 0 and d = 1. The corresponding modal oscillation is graphedbelow.

lecture notes, me 340 119
tp 2p 3p
1
�1
2
�2
3
�3
x1(t) = 3 cosp
3t
x2(t) = cosp
3t
Similarly, w2 corresponds to an out-of-phase mode shape 1 : �3,for which
x1(t) = cosp
13t
x2(t) = �3 cosp
13t
if c = 0 and d = 1. The corresponding modal oscillation is graphedbelow.
tp 2p 3p
1
�1
2
�2
3
�3
x1(t) = cosp
13t
x2(t) = �3 cosp
13t
10. Here,
X1(s) =ds + c + 1
2 F1(s) + 2�X2(s)� X1(s)
�
s2 + 5,
X2(s) =f s + e + 1
2 F2(s) + 2�X1(s)� X2(s)
�
s2 + 2.
It is clear that c = d = e = f = 0, F1(s) = 2, and F2(s) = 2kis equivalent to the case that c = 1, e = k, d = f = 0, andF1(s) = F2(s) = 0. The latter case results in a modal oscillation,provided that 1 : k describes the corresponding mode shape or,

lecture notes, me 340 120
equivalently, that the column matrix⇣
1 k⌘T
is an eigenvectorof
s2 + 7 �2�2 s2 + 4
!
An eigenvalue l of this matrix is a solution u = l of the character-istic equation �����
s2 + 7 � u �2�2 s2 + 4 � u
����� = 0
i.e., l = s2 + 3 or l = s2 + 8. For the corresponding eigenvectors⇣s t
⌘T,✓
s2 + 7 �✓
s2 + 3◆◆
s � 2t = 0 ) t = 2s
and ✓s2 + 7 �
✓s2 + 8
◆◆s � 2t = 0 ) t = �1
2s
respectively. It follows that k = 2 or k = �1/2.
11. A harmonic response with period close to 1.66 s corresponds to amodal oscillation with natural frequency w ⇡ 3.78 rad/s. For thismechanism, �����
13.0 � w2 �10.4�1.27 4.34 � w2
����� = 0
in the appropriate units, implies that w = w! ⇡ 1.74 rad/s andw = w2 ⇡ 3.78 rad/s. For the eigenvector
⇣s t
⌘corresponding
to w2, t ⇡ �0.13s. It follows that the second mass reaches its max-imal displacement in the negative direction when the first massreaches its maximal displacement in the positive direction and viceversa. When the first mass is half-way between its maximal dis-placements, this is also true of the second mass. The sketch belowgives a qualitative sense of the corresponding mode shape.
x1
x2
t = 0 s:
x1
x2
t ⇡ 0.42 s:

lecture notes, me 340 121
x1
x2
t ⇡ 0.83 s:
x1
x2
t ⇡ 1.25 s:
12. In the frequency domain,
X1 =ds + c0 + K(X2 � X1)/m1
s2 + k1/m1, X2 =
f s + e0 � K(X2 � X1)/m2s2 + k2/m2
or, equivalently,
s2 + k1+Km1
� Km1
� Km2
s2 + k2+Km2
!·
X1X2
!=
ds + c0
f s + e0
!
where c0 = c + a/m1 and e0 = e + b/m2 account for the change tothe initial velocities that results from the impulsive forcing.
The response is a modal oscillation with angular frequency w
provided that
X1 =ds + c0
s2 + w2 , X2 =f s + e0
s2 + w2
which, in turn, is true if w2 is an eigenvalue of k1+K
m1� K
m1
� Km2
k2+Km2
!
and ds + c0
f s + e0
!
is a corresponding eigenvector.
With the given numerical values for m1, m2, k1, k2, and K, theeigenvalues are 8 and 3 with corresponding eigenvectors
�21
!,
12
!

lecture notes, me 340 122
It follows that the response is a modal oscillation with frequencyp8 if both d = �2 f and c0 = �2e0, and a modal oscillation with
frequencyp
3 if both f = 2d and e0 = 2c0. In the first case,
x1(t) = �2 f cosp
8t � 2e0p8
sinp
8t, x2(t) = f cosp
8t +e0p
8sin
p8t
In the second case,
x1(t) = d cosp
3t +c0p
3sin
p3t, x2(t) = 2d cos
p3t +
2c0p3
sinp
3t
If neither of these relations hold for the initial conditions, then theresponse is a sum of the two modal oscillations, i.e.,
x1(t) = �2A cosp
8t � 2Bp8
sinp
8t + C cosp
3t +Dp
3sin
p3t
x2(t) = A cosp
8t +Bp8
sinp
8t + 2C cosp
3t +2Dp
3sin
p3t
where
�2A + C = d,�2B + D = c0, A + 2C = f , B + 2D = e0
In case (a), it follows that
A = �25
, B =3
10, C =
15
, D =1110
In case (b), it follows that
A = �15
, B = 0, C =35
, D = 0
or, in other words,
x1(t) =25
cosp
8t +35
cosp
3t,
x2(t) = �15
cosp
8t +65
cosp
3t.
In particular, forp
8t = p/2 + np, x1 : x2 = 1 : 2, i.e., according tothe second mode shape. Similarly, for
p3t = p/2 + np, x1 : x2 =
�2 : 1, i.e., according to the first mode shape.
Finally, in case (c), it follows that
A = 0, B =25
, C = 0, D = �65
or, in other words,
x1(t) = � 45p
8sin
p8t � 6
5p
3sin
p3t,
x2(t) =2
5p
8sin
p8t � 12
5p
3sin
p3t

lecture notes, me 340 123
In particular, forp
8t = np, x1 : x2 = 1 : 2, i.e., according to thesecond mode shape. Similarly, for
p3t = np, x1 : x2 = �2 : 1, i.e.,
according to the first mode shape.

lecture notes, me 340 124
Lesson 7 – Frequency response
TAKE-AWAYS:
* The response of a stable convolution to a bounded input isbounded.
* For large t, the steady-state response of a stable convolutionto the input ejwt equals H(jw)ejwt, where w 7! H(jw) is thefrequency response function.
* The steady-state response to the harmonic input
A cos(wt � q)
is harmonic with amplitude A|H(jw)| and phase shift equal tothe difference between q and the phase of H(jw).
* If the magnitude of the frequency response function has alocal maximum for some frequency w⇤, then w⇤ is a resonancefrequency and the corresponding magnitude is the resonanceamplitude.
* If the magnitude of the frequency response function has alocal minimum for some frequency w⇤, then w⇤ is an atten-uation frequency. When this occurs in a mechanical system,input vibrations at the frequency w⇤ are attenuated relative tovibrations at nearby frequencies.

lecture notes, me 340 125
Online lecture: Bode diagrams
A signal f (t) is bounded if | f (t)| M for all t > 0 and someM > 0.
t
M
�M
f (t)
Figure 65: A bounded signal.
A convolution is stable if the response to a bounded input isbounded. Suppose that |i(t)| < M. Since
|o(t)| =����Z t
0h(t)i(t � t)dt
���� MZ t
0|h(t)| dt, (370)
a convolution is stable if and only ifZ •
0|h(t)| dt < •. (371)
For a stable convolution,
H(s) = L⇥h(#)
⇤(s) =
Z •
0h(t)e�st dt (372)
exists for all s with real part � 0, since in this case
|H(s)| Z •
0|h(t)| dt < •. (373)
Example 55. Consider the zero-initial-value integrator with negativefeedback shown below.
R t0 •
a
i(t) + o(t)
�
Figure 66: A zero-initial-value integra-tor with negative feedback.

lecture notes, me 340 126
This corresponds to a stable convolution with transfer function
H(s) =1
s + a(374)
and unit impulse responseh(t) = e�at, (375)
since Z •
0|e�at |dt =
1a< • (376)
provided that a > 0.
Example 56. Consider the sequential wiring of two identical zero-initial-value integrators with negative feedback shown below.
R t0 •
y(t) R t0 •
a
a
i(t) + + o(t)
��
Figure 67: A sequential wiring of twoidentical zero-initial-value integratorswith negative feedback.
This corresponds to a stable convolution with transfer function
H(s) =1
(s + a)2 (377)
and unit impulse response
h(t) = te�at, (378)
since Z •
0|te�at |dt =
1a2 < • (379)
provided that a > 0.
Consider the input i(t) = ejwt to a stable convolution with transferfunction H(s) and unit impulse response h(t). Since
o(t) =⇣
h(#) ⇤ ejw#⌘(t) = ejwt
Z t
0h(t)e�jwt dt, (380)
it follows that
o(t) ⇡ ejwtZ •
0h(t)e�jwt dt = H(jw)ejwt (381)
for large t. We call this the steady-state behavior of the output andwrite oss(t).

lecture notes, me 340 127
The complex-valued function w 7! H(jw) is known as the fre-quency response function. Since the magnitude of ejwt equals1, the magnitude of the steady-state output oss(t) = H(jw)ejwt
equals the magnitude of the frequency-response function.
A pair of graphs of the magnitude (in dB10) and phase, respectively, 10 In other words, represented by thequantity 20 log10 |H(jw)|.of H(jw) versus w is called a Bode diagram. Each graph is a Bode
plot.
Example 57. For the zero-initial-value integrator with negative feedback inExample 55 with a = 1, the frequency response function equals
H(jw) =1
jw + 1(382)
with magnitude1p
1 + w2(383)
and phase� arctan w. (384)
10�2 10�1 100 w 101 102
0
dB
�20
�40
1p1+w2
10�2 10�1 100 w 101 102�p/2
�p/4
0
� arctan w
Figure 68: A Bode diagram for a zero-initial-value integrator with negativefeedback. A logarithmic scale is usedalong the horizontal axes.
A corresponding Bode diagram is shown in the figure above.
Example 58. For the sequential wiring of two identical zero-initial-valueintegrators with negative feedback in Example 56 with a = 1, the frequency

lecture notes, me 340 128
response function equals
H(jw) =1
(jw + 1)2 =1
�w2 + 2jw + 1(385)
with magnitude1p
(1 � w2)2 + 4w2(386)
and phase
� arctan2w
1 � w2 (387)
if w < 1,
arctan2w
w2 � 1� p (388)
if 1 < w, and �p/2 if w = 1. A corresponding Bode diagram is shown inthe figure below.
10�2 10�1 100 w 101 102
0dB�20
�40
�60
�80
1p(1�w2)2+4w2
10�2 10�1 100 w 101 102�p
�3p/4
�p/2
�p/4
0� arctan 2w
1�w2 w < 1arctan 2w
w2�1 � p w > 1
Figure 69: A Bode diagram for a se-quential wiring of two identical zero-initial-value integrator with negativefeedback. A logarithmic scale is usedalong the horizontal axes.
In-class worksheet: resonance
Consider the mechanical suspension shown below. Using Newton’s2nd law, we obtain the differential equation
md2xdt2 (t) + b
dxdt
(t) + kx(t) = f (t) (389)

lecture notes, me 340 129
m
f (t)i
k
x
id
�kxi �b dxdt i
f (t)i
Free-body diagram: Figure 70: A mechanical suspension.
for the displacement x(t) of the plate, relative to the undeformedconfiguration of the spring, in the direction of the unit vector i. Withzero initial displacement and velocity, the relationship between theinput f (t) and the output x(t) is described by a convolution withtransfer function
H(s) =1
ms2 + bs + k(390)
The corresponding unit impulse response is the convolution
h(t) =✓
eg1# ⇤ eg2#◆(t) (391)
where
g1,2 =�b ±
pb2 � 4mk
2m(392)
are the poles of H(s).Provided that b > 0, this dynamical system is stable, since the unit
impulse response is a combination of exponentially decaying signalswith polynomial or trigonometric coefficients. The correspondingfrequency response function equals
H(jw) =1
�mw2 + jbw + k=
1k
11 � W2 + j2zW
(393)
where wn :=p
k/m, z := b/(2mwn), and W = w/wn. As shown inthe Bode plot on the next page, its magnitude
1k
1p(1 � W2)2 + 4z2W2
(394)
decays monotonically from its maximum of 1/k at w = 0 if z2 > 1/2.In contrast, if z2 < 1/2, the largest magnitude equals
12zkp
1 � z2(395)

lecture notes, me 340 130
and is obtained when
w = w⇤ := wn
q1 � 2z2 (396)
For small values of the damping coefficient, the resonance frequencyw⇤ is close to the natural frequency wn of the corresponding un-damped system. The resonance peaks shifts to the left from the natu-ral frequency as the damping increases.
10�1 10�0 101W
0
dB
�20
20
�40
z2 < 1/2z2 > 1/2
1p(1�W2)2+4z2W2
Figure 71: Bode plots of the magnitudeof the frequency response function forz2 < 1/2 and z2 > 1/2.
In-class worksheet: riding comfort
Consider the quarter-car vehicle-suspension model shown below.
m
k
x
f (t)
ib
Figure 72: A quarter-var vehicle sus-pension model that accounts for uneventerrain through the function f (t).
Let the unit vector i be parallel to the line of action of the suspen-sion. Denote by x the displacement of the vehicle body of mass malong i relative to the undeformed configuration of the spring, whenthe lower end of the suspension is located at some reference level.Suppose that displacements along i of the lower end of the suspen-sion relative to the reference level are described by the function f (t).

lecture notes, me 340 131
Using Newton’s 2nd law, we conclude that
md2xdt2 (t) = �b
✓dxdt
(t)� d fdt
(t)◆� k�x(t)� f (t)
�(397)
where b is the damping coefficient and k is the spring stiffness.Let
y(t) =dxdt
(t) and g(t) =d fdt
(t) (398)
It follows that
x(t) = x(0) +Z t
0y(t)dt, f (t) = f (0) +
Z t
0g(t)dt, (399)
and
y(t) = y(0) +1m
Z t
0
b�
g(t)� y(t)�+ k�
f (t)� x(t)��
dt. (400)
or, in the frequency domain
X(s) =x(0) + Y(s)
s, F(s) =
f (0) + G(s)s
, (401)
and
Y(s) =y(0) + b
m�G(s)� Y(s)
�+ k
m�
F(s)� X(s)�
s(402)
where X(s) = L⇥x(#)
⇤(s), Y(s) = L
⇥y(#)
⇤(s), F(s) = L
⇥f (#)
⇤(s), and
G(s) = L⇥g(#)
⇤(s). If we assume that x(0) = y(0) = f (0) = 0, then
X(s) =bs + k
ms2 + bs + kF(s) (403)
i.e., the relationship between the displacement of the lower end of thesuspension and the displacement of the plate is a convolution withtransfer function
H(s) =bs + k
ms2 + bs + k. (404)
The dynamic system governed by this transfer function is stable,since the same is true for the transfer function 1/(ms2 + bs + k). Themagnitude of the steady-state response xss(t) to the complex expo-nential input f (t) = ejwt is given by the magnitude of the frequencyresponse function, i.e.,
|H(jw)| =p
k2 + b2w2p(k � mw2)2 + b2w2
=
p1 + 4z2W2
p(1 � W2)2 + 4z2W2
(405)
where wn :=p
k/m, z := b/(2mwn), and W = w/wn. For W ⌧ 1,|H(jw)| ⇡ 1. For W � 1, |H(jw)| ⇡ 2z/W.
As shown in the Bode plot below, there exists a unique globalmaximum at the resonance frequency
w = w⇤ :=wn2z
rq1 + 8z2 � 1 (406)

lecture notes, me 340 132
corresponding to the resonance amplitude
|H(jw⇤)| = (1 + 8z2)1/4s
�1 +p
1 + 8z2 +
✓1 � �1+
p1+8z2
4z2
◆2(407)
Here, w⇤ < wn for all z. The resonance peak in the correspondingBode plot shifts to the left from the natural frequency as the dampingincreases. For z ⌧ 1, w⇤ ⇡ wn and |H(jw⇤)| ⇡ 1
2z .
10�1 10�0 101W
0
dB
�10
�20
p1+4z2W2p
(1�W2)2+4z2W2
Figure 73: Bode plots of the magnitudeof the frequency response functionfor the quarter-car suspension modeltransfer function. Resonance impliesa significant amplification of groundoscillations into movement of thevehicle.
In-class worksheet: a washing machine
Consider a front-loaded washing machine in the spin cycle. Assumethat the drum rotates with angular frequency w and that its totalmass (including clothes) is M, out of which an imbalance of mass mis located at a distance d from the axis of rotation. Suppose that therotating drum is constrained to move only in the vertical directionand is suspended from the frame of the washing machine by a linearspring of stiffness k and damper with damping coefficient b.
The vertical motion x(t) of the rotating drum relative to the equi-librium position is then described by the differential equation
Md2xdt2 (t) + b
dxdt
(t) + kx(t) = mdw2 cos wt (408)
For design purposes, it may be desirable to select values of the stiff-ness and damping that ensure that x(t) remains below a criticalbound during steady-state operation across a range of frequencies.
The response x(t) equals the real part of the solution of the equa-tion
Md2xdt2 (t) + b
dxdt
(t) + kx(t) = mdw2ejwt (409)
Here, x(t) is the output of a double integrator with negative feedbackand gains b/M and k/M that results from the input mdw2ejwt/M. It

lecture notes, me 340 133
M � m
wtd
•m
k
x
ib
Figure 74: A rotating imbalance.
follows that the magnitude of the steady-state response xss(t) equals
|H(jw)| = mdw2p(k � Mw2)2 + b2w2
=md
MW2
p(1 � W2)2 + 4z2W2
(410)
where wn :=p
k/M, z := b/(2Mwn), and W = w/wn.As shown in the Bode plot below, if z > 1/
p2, the magnitude
increases monotonically from 0 at w = 0 toward a limiting value ofmd/M as w ! •. In contrast, if z < 1/
p2, there exists a global
maximum at the resonance frequency
w = w⇤ :=wnp
1 � 2z2(411)
corresponding to the resonance amplitude
|H(jw⇤)| = md
M1
2zp
1 � z2. (412)
The resonance peak in the corresponding Bode plot shifts to the rightfrom the natural frequency wn as the damping increases.
In-class worksheet: vibration absorption
Consider movements induced in the mechanical suspension shownbelow by the horizontal motion of the supports.
In this case, the displacement x1(t) and x2(t) of each of the massesrelative to the equilibrium configuration satisfy the differential equa-

lecture notes, me 340 134
10�1 10�0 101W
0
dB
�20
20
�40
z2 > 1/2z2 < 1/2
W2p(1�W2)2+4z2W2
Figure 75: Bode plots of the magnitudeof the frequency response function forz2 < 1/2 and z2 > 1/2.
1/µ
k/2 k/2
1
1/21/2
z/2z/2f (t) f (t)
x1, x2i
Figure 76: A vibration absorber.
tions
1µ
dy1dt
(t) = �k�x1(t)� f (t)
���x1(t)� x2(t)
�
� z�y1(t)� y2(t)
�(413)
dy2dt
(t) =�
x1(t)� x2(t)�+ z�y1(t)� y2(t)
�(414)
wherey1(t) =
dx1dt
(t), y2(t) =dx2dt
(t). (415)
In the case of zero initial displacements and velocities, this corre-sponds to the system of coupled integrators with feedback shownbelow.
Here,
X1(s) =1s
Y1(s), X2(s) =1s
Y2(s) (416)

lecture notes, me 340 135
k µ 1s •
Y1(s)1s • X1(s)
• X2(s)1s•
Y2(s)1s
z•
•
F(s)+
� +
+
�
+
�
��
+ +
Figure 77: A block-diagram represen-tation of the two-degree-of-freedommechanism.
and
Y1(s) = �µ
s
✓k�X1(s)� F(s)
�+�X1(s)� X2(s)
�
+ z�Y1(s)� Y2(s)
�◆, (417)
Y2(s) =1s
✓�X1(s)� X2(s)
�+ z�Y1(s)� Y2(s)
�◆, (418)
where X1(s) = L⇥x1(#)
⇤(s), X2(s) = L
⇥x2(#)
⇤(s), Y1(s) = L
⇥y1(#)
⇤(s),
Y2(s) = L⇥y2(#)
⇤(s), and F(s) = L
⇥f (#)
⇤(s). It follows that
X1(s) =s2 + zs + 1
s4 + z(1 + µ)s3 + (1 + µ + kµ)s2 + kµzs + kµkµF(s) (419)
X2(s) =zs + 1
s4 + z(1 + µ)s3 + (1 + µ + kµ)s2 + kµzs + kµkµF(s). (420)
It is possible to show that the transfer functions
H1(s) =s2 + zs + 1
s4 + z(1 + µ)s3 + (1 + µ + kµ)s2 + kµzs + kµkµ (421)
H2(s) =zs + 1
s4 + z(1 + µ)s3 + (1 + µ + kµ)s2 + kµzs + kµkµ (422)
are both stable. It follows that the ratio of the magnitudes of thesteady-state responses x1,ss(t) and x2,ss(t) to the complex exponentialinput f (t) = ejwt is given by
t :=|H1(jw)||H2(jw)| =
p(1 � w2)2 + z2w2p
1 + z2w2. (423)
As seen in the diagram on the next page, this has a global minimumat
w = w⇤ :=1z
rq1 + 2z2 � 1. (424)

lecture notes, me 340 136
In particular, for z ⌧ 1, w⇤ ⇡ 1 � z2/4 and t ⇡ z. In this case, andfor input frequencies near w⇤, the design absorbs the energy from themotion of the supports predominantly in motion of the second mass.
0 1 2w0
t
1
2
3
p(1�w2)2+z2w2p
1+z2w2
Figure 78: The ratio t between thesteady-state amplitudes for the oscil-latory motion of the first and secondmass, respectively.
Exercises
1. Show that convolution with h(t) = u(t) is not stable.
2. Show that the convolution corresponding to the transfer functionH(s) = s/(s + 1) is stable.
3. Show that the convolution corresponding to the transfer functionH(s) = 1/(s2 + bs + 1) is stable for all b > 0.
4. Show that the convolution corresponding to the transfer functionH(s) = (s2 + 1)/(s4 + zs3 + 3s2 + zs + 1) is stable for all z > 0.
5. Suppose that oss(t) is the steady-state response of a stable convo-lution with transfer function H(s) to the input i(t) = ejwt. Find thesteady-state response to the input i(t) = e�jwt.
6. Suppose that oss(t) is the steady-state response of a stable convo-lution with transfer function H(s) to the input i(t) = ejwt. Find thesteady-state response to the input i(t) = cos wt.
7. Describe the steady-state response of the stable convolution withtransfer function
H(s) =s � 1
s2 + s + 4to a general harmonic input, and specialize to the case that i(t) =2 sin
p3t.
8. Draw a Bode diagram for the transfer function H(s) = s/(s + 1).

lecture notes, me 340 137
9. Draw a Bode diagram for the transfer function H(s) = s/(s + 1)2.
10. Show that the frequency response function corresponding to thetransfer function
H(s) =1
ms2 + bs + khas a resonance peak only if the dynamical system is under-damped.
11. Suppose that a convolution is described by the Bode diagramshown below.
10�1 100 101 w 102
0dB�20
�40
�60
10�1 100 101 w 102
�p
p/2
p
�p/2
�p
Find the steady-state response to the input i(t) = cos 3t � cos 10t.
•
Solutions
1. Here,
o(t) =Z t
0u(t)i(t � t)dt =
Z t
0i(s)ds,
where s = t � t. The input i(t) = u(t) is bounded, but
o(t) =Z t
0u(s)ds = t
is not bounded.

lecture notes, me 340 138
2. Here,
h(t) =Ddt
e�t = d(t)� e�t
and ����Z t
0h(t)i(t � t)dt
���� =����i(t)�
Z t
0e�t i(t � t)dt
����
or, in other words,����Z t
0h(t)i(t � t)dt
���� |i(t)|+����Z t
0e�t i(t � t)dt
����.
If i(t) is bounded, i.e., |i(t)| < M for all t, then����Z t
0h(t)i(t � t)dt
���� M + MZ t
0e�t dt 2M.
for all t.
3. Since s2 + bs + 1 = (s � g1)(s � g2) for some complex numbers g1and g2 corresponding to the poles of H(s), it follows that h(t) is aconvolution of eg1t and eg2t. In particular,
Z t
0|h(t)|dt < •
provided that the real parts of g1 and g2 are both negative.
Let g(b) represent the dependence of one of the poles on b, suchthat
g2(b) + bg(b) + 1 = 0
Then, g(0) equals either j or �j. Moreover, differentiation andsubstitution of b = 0 yields
2g(0)g0(0) + g(0) = 0 ) g0(0) = �12
For b ⌧ 1, it follows g(b) ⇡ g(0) � b/2, i.e., that the real partis negative for small, but positive b. But g(b) is purely imaginaryonly if b = 0, since
g(b) = jw ) �w2 + jbw + 1 = 0
is possible only if b = 0. It follows that the real part must benegative for all b > 0.
4. Since s4 + zs3 + 3s2 + zs + 1 = (s � g1)(s � g2)(s � g3)(s �g4) for some complex numbers g1, g2, g3, and g4 correspondingto the poles of H(s), it follows that h(t) is combination of termsobtained by various convolutions of eg1t, eg2t, eg3t, and eg4t, andtheir distributional derivatives. In particular,
Z t
0|h(t)|dt < •

lecture notes, me 340 139
provided that the real parts of g1, g2, g3, and g4 are all negative.
Let g(z) represent the dependence of one of the poles of H(s) onz, such that
g4(z) + zg3(z) + 3g2(z) + zg(z) + 1 = 0
Then, g(0) equals one of the purely imaginary numbers
±j
s3 ±
p5
2
Differentiation and substitution of z = 0 yields
4g3(0)g0(0) + g3(0) + 6g(0)g0(0) + g(0) = 0,
or, in other words,
g0(0) = � g2(0) + 14g2(0) + 6
= �5 ±p
520
< 0.
But g(z) is purely imaginary only if z = 0, since
g(z) = jw ) w4 � jzw3 � 3w2 + jzw + 1 = 0
only if z = 0. It follows that the real part of g(z) must be negativefor all z > 0.
5. Here,oss(t) = H(jw)ejwt
The response to the input i(t) = e�jwt then equalsZ t
0h(t)e�jw(t�t) dt = e�jwt
Z t
0h(t)ejwt dt
and the steady-state response becomes
e�jwtZ •
0h(t)ejwt dt = ejwt
Z •
0h(t)e�jwt dt
or, in other wordsH(jw)ejwt = oss(t).
6. Since
cos wt =ejwt + e�jwt
2the steady-state response to i(t) = cos wt equals
oss(t) + oss(t)2
i.e., the real part of oss(t) = H(jw)ejwt. If q denotes the phase ofH(jw), then this equals
|H(jw)| cos(wt + q).

lecture notes, me 340 140
7. The transfer function corresponds to the frequency response func-tion
H(jw) =jw � 1
4 � w2 + jw.
It follows from the previous exercise that
i(t) = A cos(wt � q) ) oss(t) = A|H(jw)| cos(wt � q + arg H(jw)),
where |H(jw)| and arg H(jw) denote the magnitude and phase ofH(jw). Here,
H(jp
3) =�1 + j
p3
1 + jp
3=
2ej2p/3
2ejp/3 = ejp/3
andi(t) = 2 sin
p3t = 2 cos(
p3t � p/2)
implies that
oss(t) = 2 cos(p
3t � p/2 + p/3) = 2 sin(p
3t + p/3).
The amplitude of the steady-state response equals 2|H(jp
3)| = 2.The absolute value of the difference in phase between the inputand the steady-state response equals | arg H(j
p3)| = p/3.
In general,
|H(jw)| =p
1 + w2p(4 � w2)2 + w2
A resonance frequency w⇤ corresponds to a local maximum of|H(jw)|. This is also a local maximum of |H(jw)|2, i.e., such thatd|H(jw)|2/dw = 0 when evaluated at w = w⇤. Here,
ddw
|H(jw)|2 = �2ww4 + 2w2 � 23
(w4 � 7w2 + 16)2
equals 0 when w = 0 or w =p�1 + 2
p6 ⇡ 1.97.
A Bode plot of the magnitude |H(jw)| is a graph of 20 log10 |H(jw)|against w that uses a logarithmic scale for w. Here,
20 log10 |H(jp
3)| = 0, 20 log10 |H(j1)| ⇡ �7.0,
and20 log10 |H(j0.1)| ⇡ �12.0.
Moreover, 20 log10 |H(jw)| = �20 provided that |H(jw)| = 0.1,which is true for w ⇡ 10.4. Accordingly, a Bode plot of the magni-tude has the form shown below.

lecture notes, me 340 141
10�1 10�0 101w
0
dB
�10
�20
8. The frequency response function
H(jw) =jw
jw + 1
has magnitudewp
1 + w2
and phasep
2� arctan w
A corresponding Bode diagram is shown below.
10�2 10�1 100 w 101 102
0
dB
�20
�40
wp1+w2
10�2 10�1 100 w 101 1020
p/4
p/2
p2 � arctan w
9. The frequency response function
H(jw) =jw
(jw + 1)2

lecture notes, me 340 142
has magnitudew
1 + w2
and phasep
2� 2 arctan w
A corresponding Bode diagram is shown below.
10�2 10�1 100 w 101 102
0
dB
�20
�40
w1+w2
10�2 10�1 100 w 101 102
0
p/4
p/2
�p/4
�p/2
p2 � 2 arctan w
10. The frequency response function
H(jw) =1
�mw2 + jbw + k
has magnitude1p
(k � mw2)2 + b2w2
The derivative with respect to w:
2m(k � mw2)� b2
�(k � mw2)2 + b2w2
�3/2 w
equals zero for w = 0 or w2 = (2mk � b2)/2m2. It follows thatthe derivative is negative for all w > 0 if 2mk < b2, but has aunique global maximum away from w = 0 when 2mk > b2. Aresonance peak thus exists provided that b2 < 2mk, i.e., only in theunderdamped case (for which b2 < 4mk).

lecture notes, me 340 143
11. From the Bode diagram, the magnitude and phase of H(j3) areapproximately 0.56 and p. Similarly, the magnitude and phase ofH(j10) are approximately 0.1 and �p/2. By linearity, it followsthat the steady-state response is approximately equal to
0.56 cos(3t + p)� 0.1 cos(10t � p/2)
or, in other words,
�0.56 cos 3t � 0.1 sin 10t

lecture notes, me 340 144
Lesson 8 - Newtonian dynamics
TAKE-AWAYS:
* Newtonian dynamics is a systematic formalism for derivingequations of motion for mechanical systems by applying New-ton’s 2nd law to individual particles in the system, and usingphysical observations to eliminate unknown reaction forces.
* In order to equate the product of mass and acceleration rel-ative to an inertial coordinate system with the net interactionforce on each particle, the configuration of the mechanism isdescribed in terms of unknown functions of time, known asgeneralized coordinates.
* Infinitesimal masses and forces are common in the study ofrigid bodies, in order to ensure that the total mass and forceare finite. Equations of motion that omit internal interactionforces are obtained by integration over each of the constituentbodies.

lecture notes, me 340 145
Online lecture: the Newtonian recipe
Newtonian dynamics follows a systematic recipe for derivingdifferential equations governing the motion of a mechanism. Theseare called the equations of motion of the mechanism.
Step 1: Introduce an inertial (cartesian) coordinate system,relative to which isolated particles move along straightpaths with constant speed, and let i, j, and k denoteunit vectors along the x-, y-, and z-axes.
Step 2: Formulate a position vector to each particle in themechanism. Express its components in terms ofunknown functions of time, known as generalizedcoordinates.
The smallest number of generalized coordinates required to de-scribe all particles is the number of (geometric) degrees of freedomof the mechanism.
Example 59. Consider the slender rod of length ` shown below, able torotate about the stationary axis A that is perpendicular to the rod.
`
A
y
x
z
q(t)
i
j
k
Figure 79: A slender rod constrained torotate about an axis through one of itsend points.
Introduce a coordinate system such that the stationary end point of therod coincides with the origin, and A coincides with the z-axis, and assumethat this is inertial. Other than the stationary end point of the rod, all parti-cles on the rod move along circles centered at the origin. It follows that theseparticles cannot be isolated, and must be affected by forces.
Let q(t) denote the time-dependent angle of rotation of the rod relativeto the x-axis. A rotation corresponds to a positive angle, when the directionof rotation would result in motion along the z-axis of a right-handed screw,and is negative otherwise. The position vector to the particle at distance r

lecture notes, me 340 146
from the origin is then given by
~r = r cos q(t)i + r sin q(t) j (425)
All particles of the mechanism may be described this way by considering allvalues of r on the interval [0, `]. Since q(t) is the only generalized coordi-nate required to describe the positions of all the particles in the mechanism,the mechanism has a single degree of freedom.
Step 3: Associate mass with each particle, keeping in mindthat the total mass in the mechanism must be finite.
Step 4: Compute the accelerations of each particle in themechanism, keeping in mind that the unit vectors i, j,and k do not change with time.
Example 60. If the rod in Example 59 is homogeneous and has total massM, then each particle is associated with an infinitesimal mass dm = µ dr,in terms of a constant density per unit length µ and an infinitesimallength dr. In particular,
Z
roddm =
Z `
0µ dr = µ` = M, (426)
i.e., µ = M/`.
`
dm = µ dr
A
r~r = r cos q(t)i + r sin q(t) j
Figure 80: An infinitesimal element ofmass dm, such that the integral
Rrod dm
equals the total mass of the rod.
For each particle on the rod, the acceleration is given by
~a :=d2~rdt2 = �r
�q2(t) cos q(t) + q(t) sin q(t)
�i
� r�q2(t) sin q(t)� q(t) cos q(t)
�j, (427)
where q(t) = dq(t)/dt and q(t) = d2q(t)/dt2.

lecture notes, me 340 147
Step 5: For each particle, use a free body diagram torepresent interactions with its environment, includinginteractions with other particles in the mechanism,keeping in mind that the total force acting on themechanism must be finite.
Step 6: For each particle, use Newton’s 2nd law to equate theproduct of mass and acceleration with the total forceacting on the particle.
Step 7: Use physical observations to eliminate unknowninteraction forces from the system of equationsobtained from Newton’s 2nd law.
Example 61. Suppose that the rod in Example 59 interacts with its en-vironment through a uniform force field with field strength g and paral-lel to the y-axis, such that each particle experiences an infinitesimal forced~Fg = �g dm j. In addition, each particle interacts with other particles inthe mechanism to ensure that the rod retains its shape and mass distribution.Some subset of particles are also interacting with the joint at the origin toensure that the rod’s motion is a rotation about the joint axis.
y
x
z
i
j
k
d~Fg = �g dm j
d~Fr
Figure 81: A free-body diagram in-cluding both known and unknowninteractions.
In the free-body diagram above, the force vector d~Fr denotes an unknown,infinitesimal reaction force associated with internal interactions within therod and/or with the hinge. Newton’s 2nd law now becomes
dm~a = d~Fg + d~Fr (428)
or, in other words,
� r dm�q2(t) cos q(t) + q(t) sin q(t)
�i
� r dm�q2(t) sin q(t)� q(t) cos q(t)
�j = �g dm j + d~Fr. (429)
Physical observations suggest that
k •Z
rod~r ⇥ d~Fr = 0, (430)

lecture notes, me 340 148
i.e., that the total torque of the unknown reaction forces about the hingeaxis vanishes. Then, since
k •�~r ⇥ i
�= �r sin q(t), k •
�~r ⇥ j
�= r cos q(t), (431)
the equation
�Z
rodr dm
�q2(t) cos q(t) + q(t) sin q(t)
�✓k •�~r ⇥ i
�◆
�Z
rodr dm
�q2(t) sin q(t)� q(t) cos q(t)
�✓k •�~r ⇥ j
�◆
= �Z
rodg dm
✓k •�~r ⇥ j
�◆+ k •
Z
rod~r ⇥ d~Fr, (432)
can be simplified to
M`
q(t)Z `
0r2 dr = �M
`cos q(t)g
Z `
0r dr. (433)
It follows that2`3
q + g cos q = 0 (434)
is the equation of motion of the rod.
In-class worksheet: a projectile
Consider a body that is able to translate freely, but not rotate. Letx(t)i + y(t) j + z(t)k denote the position vector of some particle onthe body relative to an inertial coordinate system. Then, for everyparticle on the body,
~r = (x(t) + rx)i + (y(t) + ry) j + (z(t) + rz)k (435)
for some particle-dependent constants rx, ry, and rz.The acceleration equals
~a = x(t)i + y(t) j + z(t)k (436)
where x(t) = d2x(t)/dt2, y(t) = d2y(t)/dt2, and z(t) = d2z(t)/dt2,independently of the particle. Each particle may be associated withthe infinitesimal mass dm, such that
Z
bodydm = M (437)
equals the total mass of the body.In the free-body diagram below, d~Fr denotes unknown reaction
forces that ensure that the body retains its shape and mass distribu-tion, and d~Fe denotes all other interaction forces. Newton’s 2nd lawthen becomes
dm�
x(t)i + y(t) j + z(t)k�= d~Fr + d~Fe. (438)

lecture notes, me 340 149
x
y
z
i
j
k
x(t)i + y(t) j + z(t)k•
rxi + ry j + rzk
•
~r = (x(t) + rx)i + (y(t) + ry) j + (z(t) + rz)k
Figure 82: A projectile with threedegrees of freedom.
x
y
z
dm
~r
i
j
k
Figure 83: An infinitesimal mass ele-ment.
x
y
z
i
j
k
d~Fr
d~Fe
Figure 84: A free-body diagram includ-ing known and unknown forces.

lecture notes, me 340 150
Physical observations suggest thatZ
bodyd~Fr =~0 (439)
i.e., the net reaction force vanishes. Then,Z
bodydm�x(t)i + y(t) j + z(t)k
�=Z
bodyd~Fr +
Z
bodyd~Fe (440)
can be simplified to
M�
x(t)i + y(t) j + z(t)k�= ~Fe, (441)
where~Fe :=
Z
bodyd~Fe = Fe,xi + Fe,y j + Fe,zk (442)
is the total (non-reaction) force on the body. It follows that
Mx(t) = Fe,x, My(t) = Fe,y, Mz(t) = Fe,z (443)
are the equations of motion of the body.
In-class worksheet: rotor dynamics
For particles on a circular cylinder of radius R and length ` thatis able to rotate about a perpendicular axis A through its center,let r, j, and z denote cylindrical coordinates relative to a referenceconfiguration of the disk, and let q(t) be a time-dependent angle ofrotation of the disk relative to the reference configuration.
`
A
R
y
x
z
q(t)
i
j
k
Figure 85: A thin disk constrained torotate about an axis through its center.
Introduce a coordinate system with origin at the center of thecylinder and z-axis along the axis of rotation, and assume that this isinertial. For each particle, it follows that
~r = r cos�
j + q(t)�i + r sin
�j + q(t)
�j + zk (444)

lecture notes, me 340 151
and
~a = �r�q2(t) cos(j + q(t)) + q(t) sin(j + q(t))
�i
� r�q2(t) sin(j + q(t))� q(t) cos(j + q(t))
�j, (445)
since r, j, and z are constant.If the cylinder is homogeneous and has total mass M, then each
particle is associated with an infinitesimal mass dm = µr dr dj dz, interms of a constant density per unit volume µ, infinitesimal lengthsdr and dz, and an infinitesimal angle dj. In particular,
Z
cylinderdm =
Z `/2
�`/2
Z 2p
0
Z R
0µr dr dj dz = µpR2` = M, (446)
i.e., µ = M/pR2`.
y
x
z
i
j
k
dm = µr dr dj dz
r
j + q(t)
Figure 86: An infinitesimal mass ele-ment.
In the free-body diagram shown below, d~Fr denotes unknownreaction forces that ensure that the disk retains its shape and massdistribution, as well as constrain it to rotate about A, and d~Fe denotesall other interaction forces. Newton’s 2nd law then becomes
MpR2 r dr dj dz
✓� r�q2(t) cos(j + q(t)) + q(t) sin(j + q(t))
�i
� r�q2(t) sin(j + q(t))� q(t) cos(j + q(t))
�j◆
= d~Fr + d~Fe. (447)
Physical observations suggest that
k •Z
cylinderr ⇥ d~Fr = 0 (448)
i.e., the net reaction torque about the joint axis vanishes. Since
k • (r ⇥ i) = �r sin(j + q(t)), k • (r ⇥ j) = r cos(j + q(t)), (449)

lecture notes, me 340 152
y
x
z
i
j
k
d~Frd~Fe
Figure 87: A free-body diagram in-cluding both known and unknowninteractions.
it follows thatM
pR2 q(t)Z `/2
�`/2
Z 2p
0
Z R
0r3 dr dj dz = k •
Z
cylinderr ⇥ d~Fr
+ k •Z
cylinderr ⇥ d~Fe. (450)
can be simplified toMR2
2q(t) = Te (451)
whereTe = k •
Z
cylinderr ⇥ d~Fe (452)
is the total (non-reaction) torque about the joint axis.
In-class worksheet: rolling without slipping
Consider the roller mechanism shown below, whose rolling-without-slipping motion along the inclined plane is affected by a linear springand a uniform gravitational field.
Choose the inertial coordinate system, such that the origin co-incides with the center of the disk in the reference configurationcorresponding to the undeformed length of the spring, the inclinedplane is parallel to the x-axis, and the axis of rotation of the disk isparallel to the z-axis. The position vector to the center of the disk isthen given by
x(t)i (453)
in terms of the generalized coordinate x(t). For a particle with posi-tion vector
r cos ji + r sin j j (454)
in the reference configuration, in terms of polar coordinates r and j,the position vector then equals
~r =✓
x(t) + r cos✓
j � x(t)R
◆◆i + r sin
✓j � x(t)
R
◆j. (455)

lecture notes, me 340 153
R
K
g
a
Figure 88: A disk rolling withoutslipping along an incline in a uniformgravitational field with strength g andsuspended from a stationary support bya spring with stiffness K.
The expression �x(t)/R for the angle of rotation ensures that thedisk rolls without slipping along the incline. The mechanism has asingle degree of freedom.
x(t)/R
y
xz
i
j
k x(t)i
a
Figure 89: The angle of rotation isproportional to the displacement of thecenter of the disk.
For an arbitrary particle, the acceleration now equals
~a =
✓x(t)� r
✓x2(t)
R2 cos✓
j � x(t)R
◆� x(t)
Rsin✓
j � x(t)R
◆◆◆i
� r
✓x2(t)
R2 sin✓
j � x(t)R
◆+
x(t)R
cos✓
j � x(t)R
◆◆j. (456)
where x = dx(t)/dt and x = d2x(t)/dt2. Each particle may beassociated with the infinitesimal mass
dm =M
pR2 r dr dj. (457)

lecture notes, me 340 154
In the free-body diagram below, d~Fr denotes unknown reactionforces that ensure that the disk retains its shape and mass distribu-tion, as well as ensures that the disk rolls without slipping along theinclined plane. Let ~p := Rj � x(t)i +~r be the position vector from thepoint of contact with the inclined plane and an arbitrary particle onthe disk. Physical observations suggest that
k •Z
disk~p ⇥ d~Fr = 0, (458)
i.e., that the net reaction torque about the point of contact with the in-clined plane along a direction parallel to the axis of rolling vanishes.
dm = MpR2 r dr dj
�x(t)i
Rj
~r
~p
d~Fg
d~Fs
d~Fr
a
Figure 90: The construction of thevector ~p from the contact point tothe infinitesimal mass element, and asuperimposed free-body diagram.
Since
~p ⇥ i =✓� R � r sin
✓j � x(t)
R
◆◆k (459)
~p ⇥ j = r cos✓
j � x(t)R
◆k, (460)
the contributiond~Fg = g dm(sin ai � cos a j) (461)
from the gravitational field to the non-reaction forces satisfiesZ
disk~p ⇥ d~Fg
= � MgpR2
Z 2p
0
Z R
0
✓r cos
✓j � x(t)
R� a
◆+ R sin a
◆r dr dj k
(462)
or, in other words,Z
disk~p ⇥ d~Fg = �MgR sin a k. (463)

lecture notes, me 340 155
Similarly, the contribution d~Fs from the spring to the non-reactionforces satisfies
Z
disk~p ⇥ d~Fs = Rj ⇥ (�Kx(t)i) = KRx(t)k (464)
in terms of the spring stiffness K, since this equals the net torque ofthe force �Kx(t)i applied at the center of the disk about the contactpoint.
Finally,Z
disk~p ⇥ dm~a
=M
pR3
Z 2p
0
Z R
0r
✓x2(t)r cos
✓j � x(t)
R
◆
� x(t)✓
r2 + R2 + 2rR sin✓
j � x(t)R
◆◆◆dr dj k
(465)
or, in other words,Z
disk~p ⇥ dm~a = �3MRx(t)
2k. (466)
From Newton’s 2nd law
dm~a = d~Fg + d~Fs + d~Fr, (467)
it follows that
�3MRx(t)2
= �MgR sin a + KRx(t) (468)
corresponding to the equation of motion of the disk.
Exercises
1. Find the equation of motion for a small bead of mass m that is ableto translate along the straight line y = kx + µ in a two-dimensionalinertial coordinate system under the influence of a spring of unde-formed length ` and stiffness K, connecting the bead to the origin.
y
x
y = kx + µ
K, `
m

lecture notes, me 340 156
2. Find the equation of motion for a small bead of mass m that is ableto translate along the parabolic curve y = bx2 in a vertical inertialcoordinate system under the influence of gravity.
y
x
y = bx2
mg
3. Find the equation of motion for a small bead of mass m that isable to translate along a vertical circular curve of radius R thatis spinning about a vertical axis through its center with angularvelocity w. Consider the influence of gravity.
Rm
g
w
4. Find the equation of motion for a small bead of mass m, sus-pended in a plane from a taut string that is wrapped around avertical pulley of radius R, and moving under the influence ofgravity.
R
mg
5. Find the equations of motion for two small beads of mass m1 andm2 that are able to translate along the x- and y-axis, respectively,of an inertial coordinate system under the influence of a spring ofundeformed length ` and stiffness K, connecting the two beads.

lecture notes, me 340 157
y
xm1
m2K, `
6. Find the equation for the vertical motion of a motor of mass M,resting on a mechanical suspension with stiffness K and dampingb, due to a rotor imbalance equivalent to a particle of mass mmoving around a vertical circle of radius r with angular frequencyw.
M � m
w
•r
m
K b
7. Find the equation for a slender ring of mass M and radius Rswinging in a vertical plane about a horizontal axis through apoint on the ring under the influence of gravity and a torque t(t)about the suspension point.
R
g
t(t)

lecture notes, me 340 158
8. Find the equation of motion for a mechanism consisting of a smallbead of mass m1 that is suspended in a vertical plane at a dis-tance R from a second bead of mass m2 that is able to slide alonga horizontal axis, under the influence of gravity and a spring ofundeformed length ` and stiffness K connecting the second beadto a fixed location along the axis.
m2
m1
K, `
Rg
•
Solutions
1. Introduce the basis vectors i and j such that the position vector tothe bead equals~r = x(t)i + (kx(t) + µ) j and
~a = x(t)i + kx(t) j.
y
x
~r = x(t)i + (kx(t) + µ) j
i
j
The distance to the origin equals k~rk =p
x2(t) + (kx(t) + µ)2. Itfollows that the force of the spring on the bead equals
~Fs = �K (k~rk � `)~rk~rk
where K is the spring stiffness.

lecture notes, me 340 159
y
x
i + k j
~Fs
~Fr
i
j
In the free-body diagram above, ~Fr denotes a reaction force thatensures that the bead remains on the straight line. Physical obser-vations suggest that this force is perpendicular to the line, i.e.,
~Fr • (i + k j) = 0
since ∂~r/∂x(t) = i + k j is tangent to the line. From Newton’s 2ndlaw,
m~a = ~Fs + ~Fr
or, after dot multiplication with ∂~r/∂x(t),
(1 + k2)mx(t) = �K (k~rk � `)(1 + k2)x(t) + kµ
k~rk .
2. Introduce the basis vectors i and j such that the force of gravity onthe bead equals ~Fg = �mgj and such that the position vector to thebead equals~r = x(t)i + bx2(t) j for some constant b. It follows that
~a = x(t)i + 2b�
x2(t) + x(t)x(t)�
j.
y
x
~r = x(t)i + bx2(t) j
i
j
In the free-body diagram below, ~Fr denotes a reaction force thatensures that the bead remains on the parabolic curve. Physical ob-servations suggest that this force is perpendicular to the paraboliccurve at the location of the bead, i.e.,
~Fr •�i + 2bx(t) j
�= 0
since ∂~r/∂x(t) = i + 2bx(t) j is tangent to the curve at this location.

lecture notes, me 340 160
y
x
~Fg
~Fr
i + 2bx(t) j
i
j
From Newton’s 2nd law,
m~a = ~Fg + ~Fr
or, after dot multiplication with ∂~r/∂x(t),
mx(t) + 4mb2x(t)�
x2(t) + x(t)x(t)�= �2mgbx(t).
3. Let the origin of an inertial coordinate system coincide with thecenter of the circle. Introduce the basis vectors i, j, and k such thatthe force of gravity on the bead equals ~Fg = �mgk and such that
~r = R sin q(t) cos(wt)i + R sin q(t) sin(wt) j � R cos q(t)k
and~a can be obtained by differentiating twice with respect to t.
q(t)
m
z
y
x
j
k
i
m
wt
z
y
x
In the free-body diagram below, ~Fr denotes a reaction force thatensures that the bead remains on the circular curve. Physical ob-servations suggest that this force is perpendicular to the circularcurve at the location of the bead, i.e.,
~Fr •�
R cos q(t) cos(wt)i + R cos q(t) sin(wt) j + R sin q(t)k�= 0,
since
∂~r∂q(t)
= R cos q(t) cos(wt)i + R cos q(t) sin(wt) j + R sin q(t)k
is tangent to the circle at this location.

lecture notes, me 340 161
~Fg
~Fr
m
z
y
x
j
k
i
From Newton’s 2nd law,
m~a = ~Fg + ~Fr
or, after dot multiplication with ∂~r/∂q(t),
mR2q(t)� mR2w2 cos q(t) sin q(t) = �mgR sin q(t).
4. The distance between the bead and the point where the stringleaves the disk equals r0 + Rq(t) for some constant r0 and in termsof the angle q(t) shown in the figure below. It follows that
~r =✓
R cos q(t) +�r0 + Rq(t)
�sin q(t)
◆i
+
✓R sin q(t)�
�r0 + Rq(t)
�cos q(t)
◆j
and the acceleration~a may be obtained by differentiating twicewith respect to t.
R q(t)r0 + Rq(t)
q(t)
m
j
i
In the free-body diagram below, ~Fr denotes a reaction force thatensures that the bead remains at the end of the taut string. Phys-ical observations suggest that this force is parallel to the string,i.e.,
~Fr •�
cos q(t)i + sin q(t) j�= 0
since this implies that it is perpendicular to the vector from thecenter of the pulley to the point where the string leaves the disk.

lecture notes, me 340 162
cos q(t)i + sin q(t) j
j
i�mgj
q(t)~Fr
From Newton’s 2nd law,
m~a = ~Fr � mgj
or, after dot multiplication with cos q(t)i + sin q(t) j,
mRq2(t) + m�r0 + Rq(t)
�q(t) = �mg sin q(t).
5. Introduce the basis vectors i and j such that~r1 = x(t)i and~r2 =
y(t) j and, consequently,~a1 = x(t)i and~a2 = y(t) j.
y
x
m1
m2K, `j
i
The distance between the beads equals k~r2 �~r1k =p
x2(t) + y2(t).It follows that the force of the spring on the first bead equals
~F1,s = �K✓k~r2 �~r1k � `
◆~r1 �~r2k~r2 �~r1k
and that ~F2,s = �~F1,s is the force of the spring on the second bead.
y
x
~F1,r
~F2,r
~F1,s~F2,s
j
i
In the free-body diagrams above, ~F1,r and ~F2,r denote reactionforces that ensure that the beads remain on the coordinate axes.

lecture notes, me 340 163
Physical observations suggest that ~F1,r • i = 0 and ~F2,r • j = 0. FromNewton’s 2nd law,
m1~a1 = ~F1,s + ~F1,r, m2~a2 = ~F2,s + ~F2,r
or, after dot multiplication with i and j, respectively:
m1 x(t) = �K✓q
x2(t) + y2(t)� `
◆x(t)p
x2(t) + y2(t)
m2y(t) = �K✓q
x2(t) + y2(t)� `
◆y(t)p
x2(t) + y2(t)
6. Consider an inertial coordinate system and introduce the basisvectors i and j such that the displacement of a particle on themotor is described by the position vector
~rM = rxi + (y(t) + ry) j
for some constants rx and ry and such that the spring is unde-formed when y(t) = 0. Suppose that the rotating imbalance islocated at the top of its circular motion at t = 0 such that its dis-placement may be described by the position vector
~rm = (rc,x � r sin wt)i + (y(t) + rc,y + r cos wt) j,
for some constants rc,x and rc,y. It follows that
~aM = y(t) j, ~am = rw2 sin wt i + (y(t)� rw2 cos wt) j
y
x
M
wt r
•
j
i
rc,xi + (rc,y + y(t)) j

lecture notes, me 340 164
In the free-body diagram below, ~Fm,r denotes a reaction force thatensure that the rotating imbalance moves along its circular pathwith the desired angular frequency. Similarly, d~FM,r denotes aninfinitesimal reaction force that ensures that the motor retainsits shape and mass distribution, that it translates only verticallyrelative to the mechanical suspension and that its axis remains atthe center of the circular path of the rotating imbalance. Physicalobservations suggest that
Z
motorj • d~FM,r = � j • ~Fm,r
i.e., that the vertical component of the reaction force on the particleis equal and opposite to the vertical component of the reactionforce on the motor. Finally,
Z
motorj • d~Fs = �Ky(t),
Z
motorj • d~Fd = �by(t)
since these are the net vertical force components acting on themotor from the spring and damper, respectively.
y
x
M
•
~Fm,r
j
i
d~FM,r
d~Fs
d~Fd
dM
From Newton’s 2nd law,
m~am = ~Fm,r, dM~aM = d~FM,r + d~Fs + d~Fd
or, after dot multiplication by j, integration over the volume of themotor and addition,
m(y(t)� rw2 cos wt) + (M � m)y(t) = �Ky(t)� by(t).

lecture notes, me 340 165
7. Introduce basis vectors i, j, and k such that
~r = R✓
cos(j + q(t)) + sin q(t)◆
i + R✓
sin(j + q(t))� cos q(t)◆
j
for some angle j 2 [0, 2p). The acceleration~a may be obtained bydifferentiating twice with respect to t.
Rq(t)
q(t)
y
x
j
i
In the free-body diagram below, d~Fr denotes an infinitesimal re-action force that ensures that the ring retains its shape and massdistribution and is restricted to rotary motion about the horizontalaxis. Physical observations suggest that
Z
ringk •�~r ⇥ d~Fr
�= 0
i.e., that the net torque of the reaction forces about the axis ofrotation vanishes. With dm = M dj/2p and d~Fg = �dm g j, itfurther follows that
Z
ringk •�~r ⇥ d~Fg
�= �MgR sin q(t).
Finally, by assumptionZ
ringk •�~r ⇥ d~Ft
�= t(t).
dm
~r
d~Fg
d~Ft
d~Fr
y
x
j
k
i

lecture notes, me 340 166
From Newton’s 2nd law,
dm~a = d~Fr + d~Fg + d~Ft
or, after cross multiplication with~r, dot multiplication with k, andintegration over the entire ring,
2MR2q(t) = �MgR sin q(t) + t(t).
8. Introduce basis vectors i and j such that
~r2 = x(t)i,~r1 =~r2 + R sin q(t)i � R cos q(t) j
where x(t) = 0 corresponds to the undeformed configuration ofthe spring. We obtain the accelerations~a1 and~a2 by differentiatingtwice with respect to t.
m2
m1
~r2
R
j
k
i
q(t)
In the free-body diagrams below, ~Fr,1 and ~Fr,2 denotes reactionforces that ensure that the beads remain at distance R from eachother, that the motion of the first bead remains in the verticalplane, and the motion of the second bead remains along the axis.
m2
m1
~Fr,1
�m1gj
~Fr,2
�m2gj
�Kx(t)ij
k
i
Physical observations suggest that
k •�~r1 �~r2
�⇥ ~Fr,1 = 0

lecture notes, me 340 167
i.e., the torque of the reaction force on the first bead about the axisof rotation through the second bead vanishes. Moreover,
i •�~Fr,1 + ~Fr,2
�= 0
i.e., the horizontal component of ~Fr,2 is equal in magnitude andopposite in direction to the horizontal component of ~Fr,1.
From Newton’s 2nd law,
m1~a1 = �m1gj + ~Fr,1, m2~a2 = �m2gj � Kx(t)i + ~Fr,2
or, by making use of the physical observations above,
m1R2q(t) + m1Rx(t) cos q(t) = �m1gR sin q(t)
and
m1Rq(t) cos q(t)� m1Rq2(t) sin q(t) + (m1 + m2)x(t) = �Kx(t).

lecture notes, me 340 168
Lesson 9 - Lagrangian dynamics
TAKE-AWAYS:
* Lagrangian dynamics is a systematic formalism for deriv-ing equations of motion for mechanical systems by applyingLagrange’s equations to the kinetic energy and generalizedforces.
* The elimination of unknown reaction forces is achieved byassuming that these do not contribute to the total infinitesimalwork that results from instantaneous infinitesimal changes tothe generalized coordinates, provided that these are indepen-dent.
* The left-hand side of Lagrange’s equations involves comput-ing partial derivatives of the total kinetic energy with respectto the generalized coordinates and their derivatives, as well asdifferentiation with respect to time.

lecture notes, me 340 169
Online lecture: the Lagrangian recipe
Lagrangian dynamics follows an alternative systematic recipefor deriving equations of motion of a mechanism that are identicalto those obtained using Newtonian dynamics, provided that certainassumptions are made about the unknown reaction forces.
The first three steps of the recipe are identical to those using New-tonian dynamics.
Step 1: Introduce an inertial (cartesian) coordinate system,relative to which isolated particles move along straightpaths with constant speed, and let i, j, and k denoteunit vectors along the x-, y-, and z-axes.
Step 2: Formulate a position vector to each particle in themechanism. Express its components in terms ofunknown functions of time, known as generalizedcoordinates.
Step 3: Associate mass with each particle, keeping in mindthat the total mass in the mechanism must be finite.
A difference between the recipes appears in the fourth step.
Step 4: Compute the total kinetic energy of all particles in themechanism.
Example 62. For the rod in Example 59, the velocity of each particle isgiven by
~v :=d~rdt
= �rq(t) sin q(t)i + rq(t) cos q(t) j. (469)
The integral
T :=12
Z
rod~v •~v dm =
Mq2(t)2`
Z `
0r2 dr =
M`2q2(t)6
. (470)
equals the total kinetic energy.
While the fifth step is identical to that in the Newtonian recipe,further differences are apparent in the remaining steps of the recipe.
Step 5: For each particle, use a free body diagram torepresent interactions with its environment, includinginteractions with other particles in the mechanism,keeping in mind that the total force acting on themechanism must be finite.

lecture notes, me 340 170
Step 6: For each instantaneous infinitesimal change in ageneralized coordinate, compute the totalinfinitesimal work performed by all forces on themechanism, assuming that unknown reaction forces donot contribute to this work. Use the result to computethe generalized force for each generalized coordinate.
Step 7: Use Lagrange’s equations to equate variouscombinations of derivatives of the kinetic energy witheach of the generalized forces.
If the generalized coordinates and corresponding generalizedforces are denoted by qi(t) and Fi, respectively, for i = 1, . . . , n,and if the generalized coordinates are independent, then Lagrange’sequations are given by
ddt
✓∂T
∂qi(t)
◆� ∂T
∂qi(t)= Fi (471)
for i = 1, . . . , n. Here, qi denotes the derivative of qi(t) with respectto time. Care should be taken when differentiating the kinetic energywith respect to qi(t) and qi(t).
Example 63. For the rod in Example 59, an instantaneous infinitesimalchange dq to the value of the generalized coordinate q(t) results in an in-stantaneous infinitesimal change
d~r =∂~r
∂q(t)dq = (�r sin q(t)i + r cos q(t) j)dq (472)
to the particle’s position vector.
y
x
z
i
j
k
d~Fg = �g dm j
d~Fr
Figure 91: A free-body diagram in-cluding both known and unknowninteractions.
Using the free-body diagram above, and ignoring the contributions ofthe unknown reaction forces, we obtain the total infinitesimal work due to

lecture notes, me 340 171
gravity
dW =Z
rodd~Fg • d~r = �Mg cos q(t)
`
✓ Z `
0r dr
◆dq (473)
or, in other words,
dW = �Mg` cos q(t)2
dq. (474)
The generalized force Fq corresponding to the generalized coordinate q(t) isthe coefficient of dq in this expression for the total infinitesimal work, i.e.,
Fq = �Mg` cos q(t)2
. (475)
According to Lagrange’s equations
ddt
✓∂T
∂q(t)
◆� ∂T
∂q(t)= Fq (476)
With the expression for the kinetic energy in Example 62, we obtain
ddt
✓∂
∂q(t)M`2q2(t)
6
◆� ∂
∂q(t)M`2q2(t)
6=
ddt
M`2q(t)3
=M`2q(t)
3.
(477)The equation of motion becomes
M`2q(t)3
= �Mg` cos q(t)2
(478)
or, in other words,2`q(t)
3+ g cos q(t) = 0 (479)
which is identical to the expression in Example 61.
In-class worksheet: a projectile
Consider a body that is able to translate freely, but not rotate. Letx(t)i + y(t) j + z(t)k denote the position vector of some particle onthe body relative to an inertial coordinate system. Then, for everyparticle on the body,
~r = (x(t) + rx)i + (y(t) + ry) j + (z(t) + rz)k (480)
for some particle-dependent constants rx, ry, and rz.The velocity of each particle equals
~v = x(t)i + y(t) j + z(t)k (481)

lecture notes, me 340 172
x
y
z
i
j
k
x(t)i + y(t) j + z(t)k•
rxi + ry j + rzk
•
~r = (x(t) + rx)i + (y(t) + ry) j + (z(t) + rz)k
Figure 92: A projectile with threedegrees of freedom.
where x(t) = dx(t)/dt, y(t) = dy(t)/dt, and z(t) = dz(t)/dt,independently of the particle. Each particle may be associated withthe infinitesimal mass dm, such that
Z
bodydm = M (482)
equals the total mass of the body. It follows that the total kineticenergy equals
T =12
Z
body~v •~v dm =
M2
⇣x2(t) + y2(t) + z2(t)
⌘. (483)
In the free-body diagram below, d~Fr denotes unknown reactionforces that ensure that the body retains its shape and mass distri-bution, and d~Fe denotes all other interaction forces. Instantaneousinfinitesimal changes dx, dy, and dz to the generalized coordinatesx(t), y(t), and z(t) result in the instantaneous infinitesimal change
d~r =∂~r
∂x(t)dx +
∂~r∂y(t)
dy +∂~r
∂z(t)dz = dx i + dy j + dz k (484)
to each particle’s position vector. The total infinitesimal work per-formed by the non-reaction forces then equals
dW =Z
bodyd~Fe • d~r =
✓ Z
bodyd~Fe
◆• d~r (485)
or, in other words,
dW = Fe,xdx + Fe,ydy + Fe,zdz, (486)
where~Fe :=
Z
bodyd~Fe = Fe,xi + Fe,y j + Fe,zk (487)
is the total (non-reaction) force on the body. The generalized forcesFx, Fy, and Fz corresponding to the generalized coordinates x(t), y(t),

lecture notes, me 340 173
and z(t) are the coefficients of dx, dy, and dz, respectively, in thisexpression for the total infinitesimal work, i.e.,
Fx = Fe,x, Fy = Fe,y, Fz = Fe,z (488)
x
y
z
i
j
k
d~Fr
d~Fe
Figure 93: A free-body diagram includ-ing known and unknown forces.
According to Lagrange’s equations
ddt
✓∂T
∂x(t)
◆� ∂T
∂x(t)= Fx, (489)
ddt
✓∂T
∂y(t)
◆� ∂T
∂y(t)= Fy, (490)
ddt
✓∂T
∂z(t)
◆� ∂T
∂z(t)= Fz. (491)
But,
ddt
✓∂
∂x(t)M2
⇣x2(t) + y2(t) + z2(t)
⌘◆
� ∂
∂x(t)M2
⇣x2(t) + y2(t) + z2(t)
⌘= Mx(t) (492)
and similarly for y(t) and z(t). The equations of motion become
Mx(t) = Fe,x, My(t) = Fe,y, Mz(t) = Fe,z (493)
as expected.The assumption that the unknown reaction forces do not con-
tribute to the generalized forces implies thatZ
bodyd~Fr • d~r =
✓ Z
bodyd~Fr
◆• d~r = 0 (494)
for arbitrary dx, dy, and dz. This implies thatZ
bodyd~Fr =~0 (495)
which agrees with the physical observation that the net reaction forceshould vanish.

lecture notes, me 340 174
In-class worksheet: rotor dynamics
For particles on a circular cylinder of radius R and length ` thatis able to rotate about a perpendicular axis A through its center,let r, j, and z denote cylindrical coordinates relative to a referenceconfiguration of the disk, and let q(t) be a time-dependent angle ofrotation of the disk relative to the reference configuration.
`
A
R
y
x
z
q(t)
i
j
k
Figure 94: A thin disk constrained torotate about an axis through its center.
Introduce a coordinate system with origin at the center of thecylinder and z-axis along the axis of rotation, and assume that this isinertial. For each particle, it follows that
~r = r cos�
j + q(t)�i + r sin
�j + q(t)
�j + zk (496)
and~v = �rq(t) sin(j + q(t))i + rq(t) cos(j + q(t)) j. (497)
since r, j, and z are constant.
y
x
z
i
j
k
dm = µr dr dj dz
r
j + q(t)
Figure 95: An infinitesimal mass ele-ment.
If the cylinder is homogeneous and has total mass M, then eachparticle is associated with an infinitesimal mass dm = µr dr dj dz, interms of a constant density per unit volume µ, infinitesimal lengthsdr and dz, and an infinitesimal angle dj. In particular,
Z
diskdm =
Z `/2
�`/2
Z 2p
0
Z R
0µr dr dj dz = µpR2` = M, (498)

lecture notes, me 340 175
i.e., µ = M/pR2`. It follows that the total kinetic energy equals
T :=12
Z
disk~v •~v dm =
Mq2(t)2pR2`
Z �`/2
`/2
Z 2p
0
Z R
0r3 dr dj dz (499)
or, in other words,
T =MR2q2(t)
4. (500)
In the free-body diagram shown below, d~Fr denotes unknownreaction forces that ensure that the cylinder retains its shape andmass distribution, as well as constrain it to rotate about A, and d~Fe
denotes all other interaction forces.
y
x
z
i
j
k
d~Frd~Fe
Figure 96: A free-body diagram in-cluding both known and unknowninteractions.
An instantaneous infinitesimal change dq to the generalized coor-dinate q(t) results in the instantaneous infinitesimal change
d~r = �r dq sin(j + q(t))i + r dq cos(j + q(t)) j = k ⇥~r dq (501)
to each particle’s position vector. Recall the vector identity
~a • (~b ⇥~c) =~b • (~c ⇥~a). (502)
The total infinitesimal work performed by the non-reaction forcesthen equals
dW =Z
diskd~Fe • d~r =
Z
diskd~Fe • (k ⇥~r)dq (503)
or, in other words,
dW =
✓ Z
diskk • (~r ⇥ d~Fe)
◆dq. (504)
The generalized force Fq corresponding to the generalized coordinateq(t) is the coefficient of dq in this expression for the total infinitesi-mal work, i.e.,
Fq =Z
diskk • (~r ⇥ d~Fe) (505)

lecture notes, me 340 176
which equals the total (non-reaction) torque Te about the joint axis.According to Lagrange’s equations
ddt
✓∂T
∂q(t)
◆� ∂T
∂q(t)= Fq . (506)
But,
ddt
✓∂
∂q(t)MR2q2(t)
4
◆� ∂
∂q(t)MR2q2(t)
4=
MR2
2q(t). (507)
The equation of motion becomes
MR2
2q(t) = Te (508)
as expected.The assumption that the unknown reaction forces do not con-
tribute to the generalized forces implies thatZ
diskd~Fr • d~r = k •
✓ Z
disk~r ⇥ d~Fr
◆dq = 0 (509)
for arbitrary dq. This implies that
k •Z
diskr ⇥ d~Fr = 0 (510)
which agrees with the physical observation that the net reactiontorque about the joint axis should vanish.
In-class worksheet: rolling without slipping
Consider the roller mechanism shown below, whose rolling-without-slipping motion along the inclined plane is affected by a linear springand a uniform gravitational field.
Choose the inertial coordinate system, such that the origin co-incides with the center of the disk in the reference configurationcorresponding to the undeformed length of the spring, the inclinedplane is parallel to the x-axis, and the axis of rotation of the disk isparallel to the z-axis. The position vector to the center of the disk isthen given by
x(t)i (511)
in terms of the generalized coordinate x(t). For a particle with posi-tion vector
r cos ji + r sin j j (512)
in the reference configuration, in terms of polar coordinates r and j,the position vector then equals
~r =✓
x(t) + r cos✓
j � x(t)R
◆◆i + r sin
✓j � x(t)
R
◆j. (513)

lecture notes, me 340 177
R
K
g
a
Figure 97: A disk rolling withoutslipping along an incline in a uniformgravitational field with strength g andsuspended from a stationary support bya spring with stiffness K.
The expression �x(t)/R for the angle of rotation ensures that thedisk rolls without slipping along the incline. The mechanism has asingle degree of freedom.
x(t)/R
y
xz
i
j
k x(t)i
a
Figure 98: The angle of rotation isproportional to the displacement of thecenter of the disk.
For an arbitrary particle, the velocity now equals
~v = x(t)✓
1 +r
Rsin✓
j � x(t)R
◆◆i � x(t)
r
Rcos
✓j � x(t)
R
◆j (514)
where x = dx(t)/dt. Each particle may be associated with the in-finitesimal mass
dm =M
pR2 r dr dj. (515)
from which we obtain the total kinetic energy
T =12
Z
disk~v •~v dm =
3M4
x2(t). (516)

lecture notes, me 340 178
In the free-body diagram below, d~Fr denotes unknown reactionforces that ensure that the disk retains its shape and mass distribu-tion, as well as ensures that the disk rolls without slipping along theinclined plane. Let ~p := Rj � x(t)i +~r be the position vector from thepoint of contact with the inclined plane and an arbitrary particle onthe disk.
dm = MpR2 r dr dj
�x(t)i
Rj
~r
~p
d~Fg
d~Fs
d~Fr
a
Figure 99: The construction of thevector ~p from the contact point tothe infinitesimal mass element, and asuperimposed free-body diagram.
An instantaneous infinitesimal change dx to the generalized coor-dinate x(t) results in the instantaneous infinitesimal change
d~r = dx✓
1 +r
Rsin✓
j � x(t)R
◆◆i � dx
r
Rcos
✓j � x(t)
R
◆j (517)
or, in other words,
d~r = �(k ⇥ ~p)dxR
(518)
to each particle’s position vector. Recall the vector identity
~a • (~b ⇥~c) =~b • (~c ⇥~a). (519)
It follows thatd~F • d~r = �k • (~p ⇥ d~F)
dxR
. (520)
Since
~p ⇥ i =✓� R � r sin
✓j � x(t)
R
◆◆k (521)
~p ⇥ j = r cos✓
j � x(t)R
◆k, (522)
andd~Fg = g dm(sin a i � cos a j) (523)

lecture notes, me 340 179
it follows that
~p ⇥ d~Fg = � MgpR2
✓r cos
✓j � x(t)
R� a
◆+ R sin a
◆r dr dj (524)
the total infinitesimal work due to gravity then equals
dWg =Z
bodyd~Fg • d~r = �k •
✓ Z
body~p ⇥ d~Fg
◆dxR
(525)
or, in other words,dWg = Mg sin a dx (526)
Similarly, the total infinitesimal work due to the spring equals
dWs = �k •✓ Z
body~p ⇥ d~Fs
◆dxR
= �Kx(t)dx (527)
in terms of the spring stiffness K, since this equals the net work of theforce �Kx(t)i applied at the center of the disk. The generalized forceFx corresponding to the generalized coordinate x(t) is the coefficientof dx in the expression for the total infinitesimal work, i.e.,
Fx = Mg sin a � Kx(t). (528)
According to Lagrange’s equations
ddt
✓∂T
∂x(t)
◆� ∂T
∂x(t)= Fx (529)
or, in other words,
3M2
x(t) = Mg sin a � Kx(t) (530)
which agrees with the equation of motion obtained using the Newto-nian recipe.
The assumption that the unknown reaction forces do not con-tribute to the generalized forces implies that
Z
bodyd~Fr • d~r = �k •
✓ Z
body~p ⇥ d~F
◆dxR
= 0 (531)
for arbitrary dx. This implies that
k •Z
body~p ⇥ d~Fr = 0, (532)
which agrees with the physical observation that the net reactiontorque about the contact point along a direction parallel to the axis ofrotation should vanish.

lecture notes, me 340 180
Exercises
1. Find the equation of motion for a small bead of mass m that is ableto translate along the straight line y = kx + µ in a two-dimensionalinertial coordinate system under the influence of a spring of unde-formed length ` and stiffness K, connecting the bead to the origin.
y
x
y = kx + µ
K, `
m
2. Find the equation of motion for a small bead of mass m that is ableto translate along the parabolic curve y = bx2 in a vertical inertialcoordinate system under the influence of gravity.
y
x
y = bx2
mg
3. Find the equation of motion for a small bead of mass m that isable to translate along a vertical circular curve of radius R thatis spinning about a vertical axis through its center with angularvelocity w. Consider the influence of gravity.
Rm
g
w
4. Find the equation of motion for a small bead of mass m, sus-pended in a plane from a taut string that is wrapped around a

lecture notes, me 340 181
vertical pulley of radius R, and moving under the influence ofgravity.
R
mg
5. Find the equations of motion for two small beads of mass m1 andm2 that are able to translate along the x- and y-axis, respectively,of an inertial coordinate system under the influence of a spring ofundeformed length ` and stiffness K, connecting the two beads.
y
xm1
m2K, `
6. Find the equation for the vertical motion of a motor of mass M,resting on a mechanical suspension with stiffness K and dampingb, due to a rotor imbalance equivalent to a particle of mass mmoving around a vertical circle of radius r with angular frequencyw.
M � m
w
•r
m
K b

lecture notes, me 340 182
7. Find the equation for a slender ring of mass M and radius Rswinging in a vertical plane about a horizontal axis through apoint on the ring under the influence of gravity and a torque t(t)about the suspension point.
R
g
t(t)
8. Find the equation of motion for a mechanism consisting of a smallbead of mass m1 that is suspended in a vertical plane at a dis-tance R from a second bead of mass m2 that is able to slide alonga horizontal axis, under the influence of gravity and a spring ofundeformed length ` and stiffness K connecting the second beadto a fixed location along the axis.
m2
m1
K, `
Rg
•
Solutions
1. Introduce the basis vectors i and j such that the position vector tothe bead equals~r = x(t)i + (kx(t) + µ) j and
~v = x(t)i + kx(t) j.
It follows that
T =m2~v •~v =
mx2(t)2
(1 + k2)
is the kinetic energy.

lecture notes, me 340 183
y
x
~r = x(t)i + (kx(t) + µ) j
i
j
The distance to the origin equals k~rk =p
x2(t) + (kx(t) + µ)2. Itfollows that the force of the spring on the bead equals
~Fs = �K (k~rk � `)~rk~rk
where K is the spring stiffness.
y
x
~Fs
~Fr
i
j
In the free-body diagram above, ~Fr denotes a reaction force thatensures that the bead remains on the straight line. An instanta-neous infinitesimal change dx to the generalized coordinate x(t)results in the instantaneous infinitesimal change
d~r = dx i + k dx j
to the bead’s position vector. The total infinitesimal work per-formed by the spring then equals
dW = ~Fs • d~r = �K (k~rk � `)(1 + k2)x(t) + kµ
k~rk dx.
The generalized force Fx corresponding to the generalized coor-dinate x(t) is the coefficient of dx in this expression for the totalinfinitesimal work, i.e.,
Fx = �K (k~rk � `)(1 + k2)x(t) + kµ
k~rk .
According to Lagrange’s equations
ddt
✓∂T
∂x(t)
◆� ∂T
∂x(t)= Fx.

lecture notes, me 340 184
But,
ddt
✓∂
∂x(t)mx2(t)
2(1 + k2)
◆
� ∂
∂x(t)mx2(t)
2(1 + k2) = mx(t)(1 + k2).
The equation of motion becomes
mx(t)(1 + k2) = �K (k~rk � `)(1 + k2)x(t) + kµ
k~rk .
2. Introduce the basis vectors i and j such that the force of gravity onthe bead equals ~Fg = �mgj and such that the position vector to thebead equals~r = x(t)i + bx2(t) j for some constant b. It follows that
~v = x(t)i + 2bx(t)x(t) j
and
T =m2~v •~v =
mx2(t)2
(1 + 4b2x2(t)).
y
x
~r = x(t)i + bx2(t) j
i
j
In the free-body diagram below, ~Fr denotes a reaction force thatensures that the bead remains on the parabolic curve. An instan-taneous infinitesimal change dx to the generalized coordinate x(t)results in the instantaneous infinitesimal change
d~r = dx i + 2bx(t)dx j
to the bead’s position vector. The total infinitesimal work per-formed by the non-reaction forces then equals
dW = ~Fg • d~r = �2mgbx(t)dx.
The generalized force Fx corresponding to the generalized coor-dinate x(t) is the coefficient of dx in this expression for the totalinfinitesimal work, i.e.,
Fx = �2mgbx(t).

lecture notes, me 340 185
y
x
~Fg
~Fr
i
j
According to Lagrange’s equations
ddt
✓∂T
∂x(t)
◆� ∂T
∂x(t)= Fx.
But,
ddt
✓∂
∂x(t)mx2(t)
2�1 + 4b2x2(t)
�◆� ∂
∂x(t)mx2(t)
2�1 + 4b2x2(t)
�
= mx(t)�1 + 4b2x2(t)
�+ 8mb2 x2(t)x(t)� 4mb2 x(t)2x(t)
= mx(t) + 4mb2x(t)�
x2(t) + x(t)x(t)�
The equation of motion becomes
mx(t) + 4mb2x(t)�
x2(t) + x(t)x(t)�= �2mgbx(t).
3. Let the origin of an inertial coordinate system coincide with thecenter of the circle. Introduce the basis vectors i, j, and k such thatthe force of gravity on the bead equals ~Fg = �mgk and such that
~r = R sin q(t) cos(wt)i + R sin q(t) sin(wt) j � R cos q(t)k
and ~v can be obtained by differentiating once with respect to t.After simplification, the kinetic energy equals
T =mR2
2�q2(t) + w2 sin2 q(t)
�.
q(t)
m
z
y
x
j
k
i
m
wt
z
y
x

lecture notes, me 340 186
In the free-body diagram below, ~Fr denotes a reaction force thatensures that the bead remains on the circular curve. An instanta-neous infinitesimal change dq to the generalized coordinate q(t)results in the instantaneous infinitesimal change
d~r = R✓
cos q(t) cos(wt) i + cos q(t) sin(wt) j + sin q(t) k◆
dq
to the bead’s position vector. The total infinitesimal work per-formed by the non-reaction forces then equals
dW = ~Fg • d~r = �mgR sin q(t)dq.
The generalized force Fq corresponding to the generalized coor-dinate q(t) is the coefficient of dq in this expression for the totalinfinitesimal work, i.e.,
Fq = �mgR sin q(t).
~Fg
~Fr
m
z
y
x
j
k
i
According to Lagrange’s equations
ddt
✓∂T
∂q(t)
◆� ∂T
∂q(t)= Fq .
But,
ddt
✓∂
∂q(t)mR2
2�q2(t) + w2 sin2 q(t)
�◆
� ∂
∂q(t)mR2
2�q2(t) + w2 sin2 q(t)
�
= mR2q(t)� mR2w2 sin q(t) cos q(t).
The equation of motion becomes
mR2q(t)� mR2w2 sin q(t) cos q(t) = �mgR sin q(t).

lecture notes, me 340 187
4. The distance between the bead and the point where the stringleaves the disk equals r0 + Rq(t) for some constant r0 and in termsof the angle q(t) shown in the figure below. It follows that
~r =✓
R cos q(t) +�r0 + Rq(t)
�sin q(t)
◆i
+
✓R sin q(t)�
�r0 + Rq(t)
�cos q(t)
◆j
and the velocity ~v may be obtained by differentiating once withrespect to t. After simplification, the kinetic energy equals
T =m2�r0 + Rq(t)
�2q2(t).
R q(t)r0 + Rq(t)
q(t)
m
j
i
In the free-body diagram below, ~Fr denotes a reaction force thatensures that the bead remains at the end of the taut string. An in-stantaneous infinitesimal change dq to the generalized coordinateq(t) results in the instantaneous infinitesimal change
d~r =�r0 + Rq(t)
�✓cos q(t) i + sin q(t) j
◆dq
to the bead’s position vector. The total infinitesimal work per-formed by the non-reaction forces then equals
dW = ~Fg • d~r = �mg�r0 + Rq(t)
�sin q(t)dq
The generalized force Fq corresponding to the generalized coor-dinate q(t) is the coefficient of dq in this expression for the totalinfinitesimal work, i.e.,
Fq = �mg�r0 + Rq(t)
�sin q(t).
j
i�mgj
q(t)~Fr

lecture notes, me 340 188
According to Lagrange’s equations
ddt
✓∂T
∂q(t)
◆� ∂T
∂q(t)= Fq .
But,
ddt
✓∂
∂q(t)m2�r0 + Rq(t)
�2q2(t)
◆� ∂
∂q(t)m2�r0 + Rq(t)
�2q2(t)
= m�r0 + Rq(t)
�2q(t) + mR
�r0 + Rq(t)
�q2(t)
After division by r0 + Rq(t), the equation of motion becomes
m�r0 + Rq(t)
�q(t) + mRq2(t) = �mg sin q(t).
5. Introduce the basis vectors i and j such that~r1 = x(t)i and~r2 =
y(t) j and, consequently, ~v1 = x(t)i and ~v2 = y(t) j. The total kineticenergy then equals
T =m12~v1 •~v1 +
m22~v2 •~v2 =
m12
x2(t) +m22
y2(t).
y
x
m1
m2K, `j
i
The distance between the beads equals k~r2 �~r1k =p
x2(t) + y2(t).It follows that the force of the spring on the first bead equals
~F1,s = �K✓k~r2 �~r1k � `
◆~r1 �~r2k~r2 �~r1k
and that ~F2,s = �~F1,s is the force of the spring on the second bead.
y
x
~F1,r
~F2,r
~F1,s~F2,s
j
i

lecture notes, me 340 189
In the free-body diagrams above, ~F1,r and ~F2,r denote reactionforces that ensure that the beads remain on the coordinate axes.Instantaneous infinitesimal changes dx and dy to the generalizedcoordinates x(t) and y(t) result in the instantaneous infinitesimalchanges
d~r1 = dx i, d~r2 = dy j
to the beads’ position vectors. The total infinitesimal work per-formed by the non-reaction forces then equals
dW = ~F1,s • d~r1 + ~F2,s • d~r2 = �K✓k~r2 �~r1k � `
◆x(t)dx + y(t)dy
k~r2 �~r1k.
The generalized forces Fx and Fy corresponding to the generalizedcoordinates x(t) and y(t) are the coefficients of dx and dy in thisexpression for the total infinitesimal work, i.e.,
Fx = �K✓k~r2 �~r1k � `
◆x(t)
k~r2 �~r1k,
Fy = �K✓k~r2 �~r1k � `
◆y(t)
k~r2 �~r1k.
According to Lagrange’s equations
ddt
✓∂T
∂x(t)
◆� ∂T
∂x(t)= Fx,
ddt
✓∂T
∂y(t)
◆� ∂T
∂y(t)= Fy.
But,
ddt
✓∂
∂x(t)
✓m12
x2(t) +m22
y2(t)◆◆
� ∂
∂x(t)
✓m12
x2(t) +m22
y2(t)◆= m1 x(t)
and
ddt
✓∂
∂y(t)
✓m12
x2(t) +m22
y2(t)◆◆
� ∂
∂y(t)
✓m12
x2(t) +m22
y2(t)◆= m2y(t)
The equations of motion become
m1 x(t) = �K✓q
x2(t) + y2(t)� `
◆x(t)p
x2(t) + y2(t),
m2y(t) = �K✓q
x2(t) + y2(t)� `
◆y(t)p
x2(t) + y2(t).

lecture notes, me 340 190
6. Consider an inertial coordinate system and introduce the basisvectors i and j such that the displacement of a particle on themotor is described by the position vector
~rM = rxi + (y(t) + ry) j
for some constants rx and ry and such that the spring is unde-formed when y(t) = 0. Suppose that the rotating imbalance islocated at the top of its circular motion at t = 0 such that its dis-placement may be described by the position vector
~rm = (rc,x � r sin wt)i + (y(t) + rc,y + r cos wt) j,
for some constants rc,x and rc,y. It follows that
~vM = y(t) j, ~vm = �rw cos wt i + (y(t)� rw sin wt) j
and the total kinetic energy equals
T =M � m
2y2(t) +
m2�y2(t) + r2w2 � 2rwy(t) sin wt
�.
y
x
M
wt r
•
j
i
rc,xi + (rc,y + y(t)) j
In the free-body diagram below, ~Fm,r denotes a reaction force thatensure that the rotating imbalance moves along its circular pathwith the desired angular frequency. Similarly, d~FM,r denotes aninfinitesimal reaction force that ensures that the motor retains itsshape and mass distribution, that it translates only vertically rela-tive to the mechanical suspension and that its axis remains at the

lecture notes, me 340 191
center of the circular path of the rotating imbalance. An instanta-neous infinitesimal change dy to the generalized coordinate y(t)results in the instantaneous infinitesimal changes
d~rM = d~rm = dy j
to the position vectors to a particle on the motor and to the ro-tating imbalance. The total infinitesimal work performed by thenon-reaction forces then equals
dW =Z
motor
�d~Fs + d~Fd
�• d~rM =
�� Ky(t)� by(t)
�dy
The generalized force Fy corresponding to the generalized coor-dinate y(t) is the coefficient of dy in this expression for the totalinfinitesimal work, i.e.,
Fy = �Ky(t)� by(t).
y
x
M
•
~Fm,r
j
i
d~FM,r
d~Fs
d~Fd
dM
According to Lagrange’s equations
ddt
✓∂T
∂y(t)
◆� ∂T
∂y(t)= Fy.
After simplification, the left-hand side equals
My(t)� mrw2 cos wt.
The equation of motion becomes
My(t)� mrw2 cos wt = �Ky(t)� by(t)

lecture notes, me 340 192
7. Introduce basis vectors i, j, and k such that
~r = R✓
cos(j + q(t)) + sin q(t)◆
i + R✓
sin(j + q(t))� cos q(t)◆
j
for some angle j 2 [0, 2p). The velocity ~v may be obtained bydifferentiating once with respect to t. After simplification, thekinetic energy equals
T =MR2q2(t)
2p
Z 2p
0
�sin j � 1)dj = MR2q2(t).
since dm = M dj/2p.
Rq(t)
q(t)
y
x
j
i
In the free-body diagram below, d~Fr denotes an infinitesimal re-action force that ensures that the ring retains its shape and massdistribution and is restricted to rotary motion about the horizontalaxis. An instantaneous infinitesimal change dq to the generalizedcoordinate q(t) results in the instantaneous infinitesimal changes
d~r = R✓� sin
�j + q(t)
�+ cos q(t)
◆dq i
+ R✓
cos�
j + q(t)�+ sin q(t)
◆dq j =
�k ⇥~r
�dq
to the position vector to a particle on the ring. Since d~Fg = �dm g j,the contribution to the infinitesimal work due to gravity thenequals
dWg =Z
ringd~Fg • d~r
= �Mg2p
✓ Z 2p
0R✓
cos�
j + q(t)�+ sin q(t)
◆dj
◆dq
= �MgR sin q(t)dq
Similarly, by assumption, the contribution to the infinitesimal workdue to the applied torque equals
dWt =Z
ringd~Ft • d~r = k •
Z
ring~r ⇥ d~Ft dq = t(t)dq

lecture notes, me 340 193
The generalized force Fq corresponding to the generalized coor-dinate q(t) is the coefficient of dq in the expression for the totalinfinitesimal work, i.e.,
Fq = �MgR sin q(t) + t(t).
dm
~r
d~Fg
d~Ft
d~Fr
y
x
j
k
i
According to Lagrange’s equations
ddt
✓∂T
∂q(t)
◆� ∂T
∂q(t)= Fq ,
i.e.2MR2q(t) = �MgR sin q(t) + t(t).
8. Introduce basis vectors i and j such that
~r2 = (`+ x(t))i,~r1 =~r2 + R sin q(t)i � R cos q(t) j
where x(t) = 0 corresponds to the undeformed configuration ofthe spring. We obtain the velocities ~v1 and ~v2 by differentiatingonce with respect to t. In particular, the total kinetic energy equals
T =m1 + m2
2x2(t) +
m1R2
2q2(t) + m1R cos q(t) x(t)q(t).
m2
m1
~r2
R
j
k
i
q(t)

lecture notes, me 340 194
In the free-body diagrams below, ~Fr,1 and ~Fr,2 denotes reactionforces that ensure that the beads remain at distance R from eachother, that the motion of the first bead remains in the verticalplane, and the motion of the second bead remains along the axis.
m2
m1
~Fr,1
�m1gj
~Fr,2
�m2gj
�Kx(t)ij
k
i
Instantaneous infinitesimal changes dx and dq to the generalizedcoordinates x(t) and q(t) result in the instantaneous infinitesimalchanges
d~r2 = dx i, d~r1 = d~r2 + R cos q(t)dq i + R sin q(t)dq j
to the beads’ position vectors. The total infinitesimal work per-formed by the non-reaction forces then equals
dW = �Kx(t)dx � m1gR sin q(t)dq.
The generalized forces Fx and Fq corresponding to the generalizedcoordinates x(t) and q(t) are the coefficients of dx and dq in thisexpression for the total infinitesimal work, i.e.,
Fx = �Kx(t), Fq = �m1gR sin q(t).
According to Lagrange’s equations
ddt
✓∂T
∂x(t)
◆� ∂T
∂x(t)= Fx,
ddt
✓∂T
∂q(t)
◆� ∂T
∂q(t)= Fq .
But,∂T
∂x(t)= (m1 + m2)x(t) + m1R cos q(t)q(t),
∂T∂q(t)
= m1R2q(t) + m1R cos q(t)x(t),
∂T∂x(t)
= 0,
∂T∂q(t)
= �m1R sin q(t)x(t)q(t),

lecture notes, me 340 195
The equations of motion become
(m1 + m2)x(t)� m1R sin q(t)q2(t) + m1R cos q(t)q(t) = �Kx(t)
andm1R2q(t) + m1R cos q(t)x(t) = �m1gR sin q(t).

lecture notes, me 340 196
Lesson 10 - Linearization
TAKE-AWAYS:
* Systems that violate the principle of superposition are non-linear. Such systems may be linearized about an operatingpoint by substituting first-order Taylor expansions for of allnonlinear terms. The linearization provides an approximatedescription of the dynamics for as long as the system state isclose to the operating point.
* Equilibria correspond to constant signals for all system vari-ables. Changes in the number of stability of equilibria are bi-furcations.
* The linearization about an equilibrium may predict thestability of the equilibrium. In particular, an equilibrium isasymptotically stable if small perturbations decay to zero ast ! •, and unstable if some perturbations (no matter howsmall) grow without bound as t ! •.
* For lightly damped mechanical systems with more than onedegree of freedom, the linearization about asymptotically sta-ble equilibria can be understood in terms of modal oscilla-tions. These describe transient small oscillations about theequilibrium in the nonlinear problem, as well as resonanceto harmonic excitation.

lecture notes, me 340 197
Online lecture: stability of equilibria
Dynamic systems that do not satisfy the principle of superpo-sition are nonlinear. While we are, in principle, able to understandlinear systems completely, our understanding of all but a few excep-tional nonlinear systems is very limited.
Example 64. Consider a small bead of mass m that is able to translate alonga vertical circular curve of radius R shown below. Assume that the curve isspinning about a vertical axis through its center with angular velocity w,and that motion takes place in a uniform gravitational field with accelerationg and in the presence of a viscous damping force proportional to the angularspeed of the bead along the curve.
Rm
g
w
Let q(t) denote the angle between the ray from the center of the circleto the bead and the vertical axis, as illustrated below, and define q(t) =
dq/dt and q(t) = d2q/dt2. Using either Newton’s 2nd law or Lagrange’sequations, we obtain the equation of motion
mRq(t)� mRw2 sin q(t) cos q(t) = �mg sin q(t)� bq(t). (533)
q(t)
m
z
y
x
m
wt
z
y
x
This equation is nonlinear due to the presence of the trigonometric func-tions sin q(t) and cos q(t). It is not true that aq(t) is a solution if q(t) is asolution, in violation of the principle of superposition.

lecture notes, me 340 198
We linearize a nonlinear differential equation about an operat-ing point by replacing every nonlinear term by a first-order Taylorexpansion in small deviations from the operating point.
Example 65. To linearize the nonlinear differential equation
mRq(t)� mRw2 sin q(t) cos q(t) = �mg sin q(t)� bq(t) (534)
about the operating point 0, assume that q(t) := #d(t) for some functiond(t) and 0 < # ⌧ 1. It follows that
q(t) = #d(t), q(t) = #d(t), (535)
where d(t) = dd(t)/dt and d(t) = d2d(t)/dt2. Moreover, to first-order in#,
cos q(t) = cos�#d(t)
�⇡ cos 0 + (� sin 0)#d(t) = 1 (536)
and, similarly,
sin q(t) = sin�#d(t)
�⇡ sin 0 + (cos 0)#d(t) = #d(t). (537)
In this case, the linearized differential equation becomes
#
✓mRd(t)� mRw2d(t)
◆= #
✓� mgd(t)� bd(t)
◆(538)
or, in other words,
mRd(t) + bd(t) + m(g � Rw2)d(t) = 0, (539)
since # 6= 0.
Analysis of the linearized problem gives insight into the originalnonlinear problem, as long as the linearization remains valid.
Example 66. If D(s) := L⇥d(#)
⇤(s), then the linearized differential
equationmRd(t) + bd(t) + m(g � Rw2)d(t) = 0, (540)
is equivalent to the frequency-domain representation
D(s) =mRd(0)s + bd(0) + mRd(0)mRs2 + bs + m(g � Rw2)
(541)
The free response of this dynamic system equals a combination of the unitimpulse response h(t) corresponding to the transfer function
H(s) =1
mRs2 + bs + m(g � Rw2)(542)
and its distributional derivative Dh(t)/dt. Here,
h(t) =✓
eg1# ⇤ eg2#◆(t), (543)

lecture notes, me 340 199
where
g1,2 =�b ±
pb2 � 4m2R(g � Rw2)
2mR(544)
are poles of H(s).Suppose that q(0) and q(0) are both small. Provided that w2 < g/R,
the system is either underdamped, overdamped, or critically damped. In eachcase, q(t) remains small and q(t) ! 0 as t ! •, i.e., the linearizationcontinues to be valid for all t. The configuration with q(t) = 0 for all t is anasymptotically stable equilibrium.
If, instead, w2 > g/R, then one of the poles is positive, and |q(t)| growsexponentially fast for almost any small initial values q(0) and q(0). Inthis case, the linearization fails to be valid after some short time, and theconfiguration with q(t) = 0 for all t is an unstable equilibrium.
In-class worksheet: bifurcations
A nonlinear system may have more than one equilibrium config-uration. Linearization about each equilibrium may determine itsstability. A change in stability or in the number of equilibria is a bi-furcation.
Consider again the small bead translating along the spinningvertical circular curve shown below. Here, an equilibrium configu-ration corresponds to a position of the bead on the curve that doesnot change in time, even as the curve rotates about the vertical axisthrough its center.
Rm
g
w
Equilibrium configurations for the corresponding nonlinear differ-ential equation
mRq(t)� mRw2 sin q(t) cos q(t) = �mg sin q(t)� bq(t) (545)
correspond to time histories q(t) = q⇤, q(t) = q(t) = 0 for someconstant q⇤ 2 (�p, p]. It follows that
Rw2 sin q⇤ cos q⇤ = g sin q⇤ (546)

lecture notes, me 340 200
i.e., either sin q⇤ = 0 or cos q⇤ = g/Rw2. In the first case, q⇤ =
0 or p, independently of the value of w. In the second case, q⇤ =
± arccos(g/Rw2), provided that w2 > g/R.The figure below shows a corresponding bifurcation diagram.
Each point in the diagram represents an equilibrium configurationfor some value of w. In particular, we see that there are four equilib-ria when w2 > g/R, but only two when w2 < g/R. The bifurcation atw2 = g/R is known as a pitchfork bifurcation because of the shapeof the graphs.
w2
q⇤
p4
p2
3p4
p
�p4
�p2
g/R
arccos(g/Rw2)
Figure 100: A pitchfork bifurcationoccurs when w2 = g/R.
To linearize the governing differential equation about an equilib-rium operating point q⇤, let q(t) = q⇤ + #d(t). It follows that
q(t) = #d(t), q(t) = #d(t) (547)
Moreover, to first order in #,
cos q(t) = cos�q⇤ + #d(t)
�⇡ cos q⇤ � sin q⇤#d(t) (548)
sin q(t) = sin�q⇤ + #d(t)
�⇡ sin q⇤ + cos q⇤#d(t), (549)
andsin q(t) cos q(t) ⇡ sin q⇤ cos q⇤ + cos 2q⇤#d(t). (550)
The linearized differential equation becomes
�mRw2 cos q⇤ sin q⇤ + #
✓mRd(t)� mRw2 cos 2q⇤d(t)
◆
= �mg sin q⇤ + #
✓� mg cos q⇤d(t)� bd(t)
◆
(551)

lecture notes, me 340 201
or, after elimination using (546),
mRd(t) + bd(t) + m(g cos q⇤ � Rw2 cos 2q⇤)d(t) = 0. (552)
The equilibrium configuration at q⇤ = 0 was analyzed in theprevious example. In particular, it was found to be asymptoticallystable when w2 < g/R and unstable, otherwise. In contrast, theequilibrium configuration at q⇤ = p is always unstable.
If cos q⇤ = g/Rw2, the coefficient in front of d(t) equals
g cos q⇤ � Rw2 cos 2q⇤ =g2
Rw2 � Rw2✓
2g2
R2w4 � 1◆
(553)
or, in other words,
Rw2✓
1 � g2
R2w4
◆(554)
which is always positive when w2 > g/R. Thus, when it exists, thecorresponding equilibrium configuration is asymptotically stable. Inthe figure below, we modify the bifurcation diagram to use dashedcurve to represent unstable equilibria.
w2
q⇤
p4
p2
3p4
p
�p4
�p2
g/R
arccos(g/Rw2)
Figure 101: Solid curves represent sta-ble equilibria. Dashed curves representunstable equilibria.
In-class worksheet: a two-degree-of-freedom oscillator
Consider a mechanism consisting of a small bead of mass m1 thatis suspended in a vertical plane at a distance R from a second beadof mass m2, which in turn is able to slide along a horizontal axis, as

lecture notes, me 340 202
shown below. Suppose that motion takes place under the influenceof a uniform gravitational field with acceleration g, a spring of unde-formed length ` and stiffness K connecting the second bead to a fixedlocation along the axis, and a viscous damping force acting on thesecond bead.
m2
m1
K, `
Rg
Let x(t) denote displacements of the second bead from the unde-formed configuration of the spring, and let q(t) denote the angulardisplacement of the first bead from a position immediately beneaththe second bead. Suppose that the units of mass, length, and time arechosen so that m1 = 1, m2 = 1/µ, g = µ, and R = 1. The equations ofmotion become
(1 + 1/µ)x(t)� sin q(t)q2(t) + cos q(t)q(t) = �Kx(t)� bx(t) (555)
andq(t) + cos q(t)x(t) = � sin q(t), (556)
where b is the damping coefficient, x(t) = dx(t)/dt, x(t) = d2x(t)/dt2,q(t) = dq(t)/dt, and q(t) = d2q(t)/dt2. These equations are nonlin-ear due to the presence of the trigonometric functions in q(t) and thesquare of the angular velocity.
Equilibrium configurations correspond to x(t) = x⇤, q(t) = q⇤,x(t) = x(t) = q(t) = q(t) = 0. This implies that x⇤ = 0 and sin q⇤ = 0.To linearize about an equilibrium, let
x(t) = #dx(t), q(t) = q⇤ + #dq(t). (557)
It follows that
x(t) = #dx(t), x(t) = #dx(t), q(t) = #dq(t), q(t) = #dq(t). (558)
Moreover, to first order in #,
cos q(t) ⇡ cos q⇤ � sin q⇤#d(t) = ±1, (559)
sin q(t) ⇡ sin q⇤ + cos q⇤#d(t) = ±#dq(t), (560)
q2(t) ⇡ 0, (561)

lecture notes, me 340 203
where the upper and lower signs refer to q⇤ = 0 and q⇤ = p, respec-tively. The linearized differential equations become
(1 + 1/µ)dx(t)± dq(t) = �Kdx(t)� bdx(t) (562)
dq(t)± dx(t) = ⌥dq(t). (563)
or, after solving for dx(t) and dq(t),
dx(t) = µdq(t)� µbdx(t)� µKdx(t) (564)
dq(t) = ±µKdx(t)± µbdx(t)⌥ (1 + µ)dq(t) (565)
An equivalent frequency-domain block diagram is shown below.
• 1s
dx(0)
•
dx(0)
1s •
µK
µb
�+
+
+ Dx(s)+
+
1s
dq(0) dq(0)
1s •
1 + µ
µ
+
+
+
+
Dq(s)
⌥
±
+
Figure 102: A block diagram repre-sentation of the linearization about anequilibrium configuration.
Here, Dx(s) := L⇥dx(#)
⇤(s) and Dq(s) := L
⇥dq(#)
⇤(s) satisfy the
matrix equation
A(s) ·
Dx(s)Dq(s)
!= B(s), (566)
where
A(s) =
s2 + µbs + µK �µ
⌥(µbs + µK) s2 ± (1 + µ)
!(567)
and
B(s) =
(s + µb)dx(0) + dx(0)
sdq(0) + dq(0)⌥ µbdx(0)
!. (568)

lecture notes, me 340 204
It follows that Dx(s)Dq(s)
!= A�1(s) · B(s), (569)
where
A�1(s) =
(s2 ± (1 + µ))/ |A(s)| µ/ |A(s)|±(µbs + µK)/ |A(s)| (s2 + µbs + µK)/ |A(s)|
!
(570)and the determinant
|A(s)| = s4 + µbs3 +�µK ± (1 + µ)
�s2 ± µbs ± µK. (571)
The stability of either equilibrium configuration is clearly de-termined by the unit impulse response h(t) corresponding to thetransfer function
H(s) =1
|A(s)| (572)
since dx(t) and dq(t) are linear combinations of h(t) and its distri-butional derivatives. These decay exponentially as t ! • providedthat all poles of H(s) have negative real part, and grow unboundedexponentially fast if any pole has positive real part.
Exercises
1. Linearize the function f (x) = x/(1 + x2) about the operating pointx⇤ = 3.
2. Linearize the function g(x, q) =p
1 + x2(q � sin q) about theoperating point (x⇤, q⇤) = (1, p/4).
3. The bead in the figure below slides along the straight line y =
kx + µ.
y
x
y = kx + µ
K, `
m
The corresponding equation of motion is
mx(t)(1 + k2) = �K (k~rk � `)(1 + k2)x(t) + kµ
k~rk ,
where k~rk =p
x2(t) + (kx(t) + µ)2. Find all equilibrium configu-rations, and draw a bifurcation diagram with ` along the horizon-tal axis for the case that µ = 1, k = 0.

lecture notes, me 340 205
4. Linearize the nonlinear equation in the previous exercise aboutthe equilibrium configuration that exists for all values of `, anddescribe the dynamics of the linear system.
5. The bead in the figure below is suspended from the taut stringthat is wrapped around a vertical pulley.
R
mg
The corresponding equation of motion is
m�r0 + Rq(t)
�q(t) + mRq2(t) = �mg sin q(t).
Find all physically realizable equilibrium configurations and de-scribe the corresponding linearized dynamics.
6. Show that one of the roots of the polynomial�����
s2 + µbs + µK �µ
µbs + µK s2 � 1 � µ
�����
has positive real part when b > 0. What is the implication tothe stability of the equilibrium configuration with q⇤ = p in thetwo-degree-of-freedom mechanism in the second worksheet?
7. Show that all roots of the polynomial�����
s2 + µbs + µK �µ
�µbs � µK s2 + 1 + µ
�����
have negative real part when b > 0. What is the implication tothe stability of the equilibrium configuration with q⇤ = 0 in thetwo-degree-of-freedom mechanism in the second worksheet?
8. Describe the linearized dynamics near q⇤ = 0 in the two-degree-of-freedom mechanism in the second worksheet in the case thatµ = K = 1 and b = 0.
•
Solutions
1. Let x = 3 + #d for # ⌧ 1. By Taylor’s theorem, to first order in #,
f (3 + #d) ⇡ f (3) + # f 0(3)d

lecture notes, me 340 206
But, f (3) = 3/10 and
f 0(x) =1 � x2
(1 + x2)2
It follows thatf (x) ⇡ 3
10� 2
25(x � 3)
2. Let x = 1 + #dx and q = p/4 + #dq . By Taylor’s theorem, to firstorder in #,
g(1+ #dx, p/4+ #dq) ⇡ g(1, p/4)+ #
✓∂g∂x
(1, p/4)dx +∂g∂q
(1, p/4)dq
◆
But,g(1, p/4) =
p
2p
2� 1
and
∂g∂x
(x, q) =xp
1 + x2(q � sin q),
∂g∂q
(x, q) =p
1 + x2(1 � cos q)
It follows that
g(x, q) ⇡ p
2p
2� 1 +
✓p
4p
2� 1
2
◆(x � 1) +
�p2 � 1
�✓q � p
4
◆
3. An equilibrium configuration corresponds to x(t) = x⇤, x(t) =
x(t) = 0 for some constant x⇤. Here,
K✓q
x⇤2 + (kx⇤ + µ)2 � `
◆(1 + k2)x⇤ + kµpx⇤2 + (kx⇤ + µ)2
= 0
if either (1 + k2)x⇤ + kµ = 0 orp
x⇤2 + (kx⇤ + µ)2 = `. In the firstcase,
x⇤ = � kµ
1 + k2
independently of the value of `. In the second case,
x⇤ =�kµ ±
p(1 + k2)`2 � µ2
1 + k2
as long as ` > |µ|/p
1 + k2. A bifurcation diagram for the casewhen µ = 1 and k = 0 is shown below

lecture notes, me 340 207
`2
q⇤
1
2
�1
�2
1
p`2 � 1
4. Letx(t) = � kµ
1 + k2 + #d(t)
so thatx(t) = #d(t), x(t) = #d(t).
Then, to first order in #,
qx2(t) + (kx(t) + µ)2 ⇡
sµ2
1 + k2
After simplification, the linearized differential equation becomes
md(t) + K✓
1 �
s1 + k2
µ2 `
◆d(t) = 0
As long as ` < |µ|/p
1 + k2, all solutions to this equation areharmonic signals with angular frequency
vuutKm
✓1 �
s1 + k2
µ2 `
◆.
In contrast, for ` > |µ|/p
1 + k2, |d(t)| grows exponentially fast foralmost all initial conditions.
5. An equilibrium configuration corresponds to q(t) = q⇤, q(t) =
q(t) = 0 for some constant q⇤. Here, sin q⇤ = 0 implies thatq⇤ = 0 or p. A moment’s reflection shows that only the former isa physically realizable equilibrium in which the string is taut andable to provide a force that balances that of gravity.
To linearize the equation of motion about the equilibrium configu-ration, let q(t) = #d(t), such that
q(t) = #d(t), q(t) = #d(t).

lecture notes, me 340 208
To first order in #, the linearized differential equation becomes
mr0d(t) + mgd(t) = 0
All solutions are harmonic signals with angular frequencyp
g/r0.
6. As long as no two roots coincide, they depend smoothly on thedamping coefficient b. When b = 0, the roots satisfy the equation
s4 +�µK � 1 � µ
�s2 � µK = 0
i.e., s = ±jw or s = ±g, where
w2 =�1 � µ + µK +
p(�1 � µ + µK)2 + 4µK
2
and
g2 =1 + µ � µK +
p(1 + µ � µK)2 + 4µK
2are both positive. It follows that there exists one real positive rootwhen b = 0. As b increases, this can become negative only ifit crosses 0, but 0 is never a root for any b. It follows that oneroot has positive real part when b > 0 and the correspondingequilibrium configuration is unstable.
7. Assume that no two roots coincide. Then, if s(b) denotes the de-pendence of a root on b, then s(0) satisfies the equation
s(0)4 +�µK + 1 + µ
�s(0)2 + µK = 0
i.e., s(0) = ±jw, where
w2 =µK + 1 + µ ±
p(µK + 1 + µ)2 � 4µK
2
are both positive. There are purely imaginary roots only if b = 0.
Implicit differentiation of��A�s(b)
��� = 0 with respect to b andsubstitution of b = 0, yields
s0(0) = �µ
21 + s2(0)
1 + µ + Kµ + 2s2(0)
which is purely real. After substitution of s(0) and simplification,
s0(0) = �µ
4
✓1 +
�1 + µ + µKp(1 + µ + µK)2 � 4µK
◆,
which is always negative, since
(1 + µ + µK)2 � 4µK � (�1 + µ + µK)2 = 4µ
It follows that all roots have negative real part when b > 0 and thecorresponding equilibrium configuration is asymptotically stable.

lecture notes, me 340 209
8. In the frequency domain, the linearized dynamics are described bythe matrix equation
A(s) ·
Dx(s)Dq(s)
!= B(s),
where
A(s) =
s2 + 1 �1�1 s2 + 2
!
and
B(s) =
sdx(0) + dx(0)sdq(0) + dq(0)
!.
The matrix A(s) has two formal eigenvalues of the form s2 + w2,where
w =q(3 ±
p5)/2
For the corresponding eigenvectors⇣
s t⌘T
,
s =1 ⌥
p5
2t.
For arbitrary initial conditions, the free response is a sum of
modal oscillations with angular frequenciesq(3 +
p5)/2 and
q(3 �
p5)/2, respectively. The corresponding mode shapes are
1 �p
5 : 2 and 1 +p
5 : 2 and correspond to harmonic signals ineach degree of freedom that differ in phase by p or are identicalin phase, respectively. Such a sum of modal oscillations is typi-cally not periodic, since the angular frequencies are not rationallyrelated.