Embed Size (px)
Citation preview
Lesson 11: Solving Mechanical System
Dynamics Using Laplace Transforms
ET 438a Automatic Control Systems Technology
1
lesson11et438a.pptx
Learning Objectives
lesson11et438a.pptx
2
After this presentation you will be able to: Draw a free body diagram of a translational mechanical
system, Write a differential equation that describes the position of a
mechanical system as it varies in time. Use Laplace transforms to convert differential equations into
algebraic equations. Take the Inverse Laplace transform and find the time
response of a mechanical system. Examine the impact of increased and decreased damping on
a mechanical system.
Using Laplace Transforms to Solve
Mechanical Systems
lesson11et438a.pptx
3
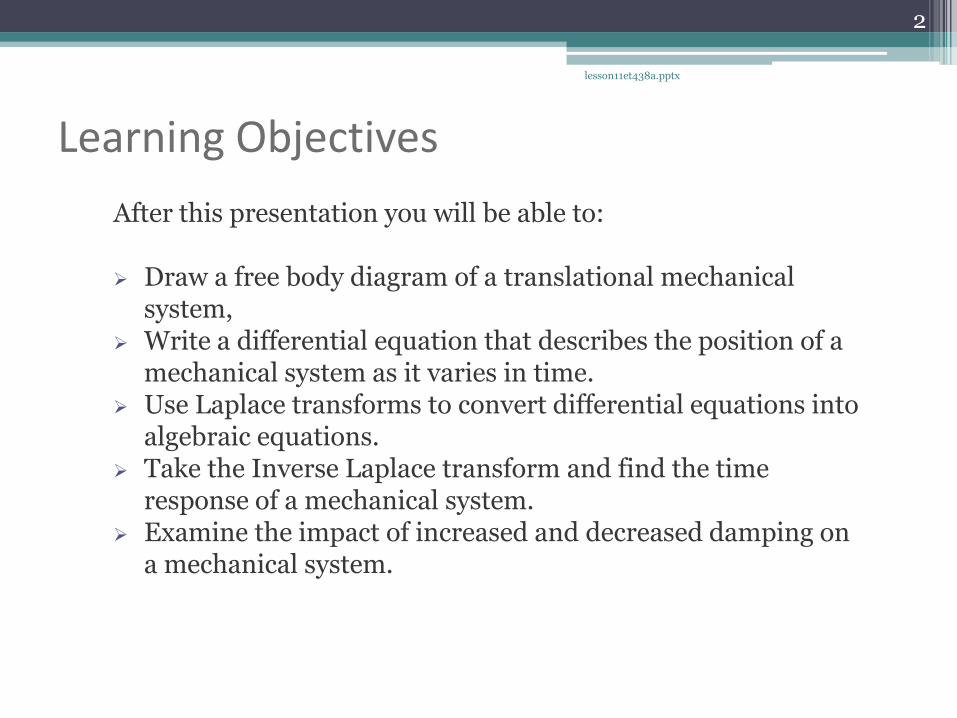
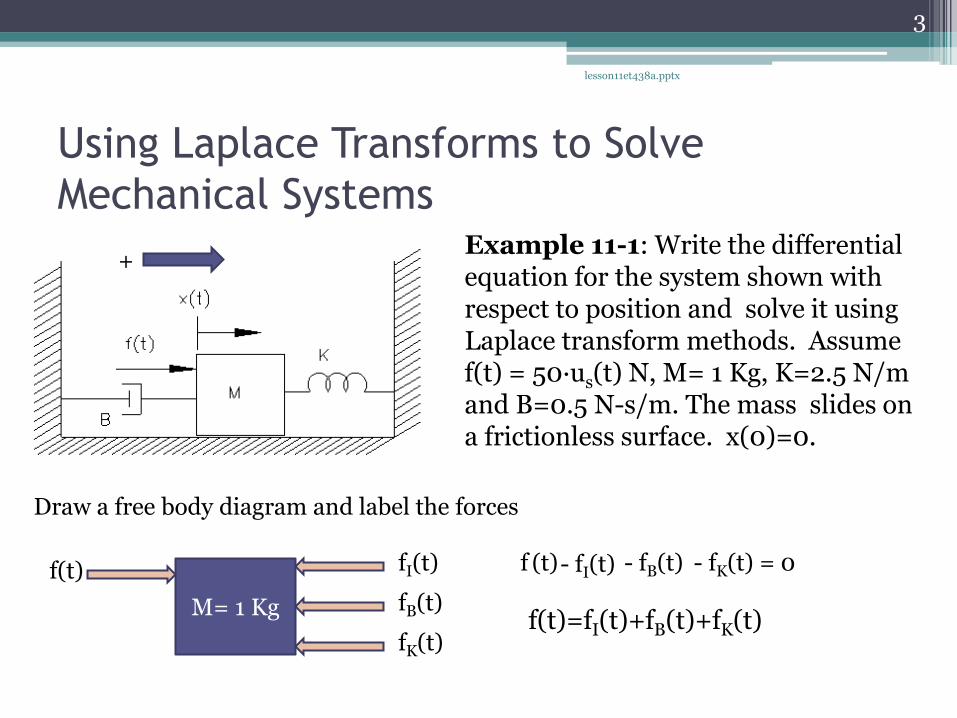
Example 11-1: Write the differential equation for the system shown with respect to position and solve it using Laplace transform methods. Assume f(t) = 50∙us(t) N, M= 1 Kg, K=2.5 N/m and B=0.5 N-s/m. The mass slides on a frictionless surface. x(0)=0.
Draw a free body diagram and label the forces
+
M= 1 Kg
f(t) - fI(t) f (t) fI(t)
fB(t)
- fB(t)
fK(t)
- fK(t) = 0
f(t)=fI(t)+fB(t)+fK(t)
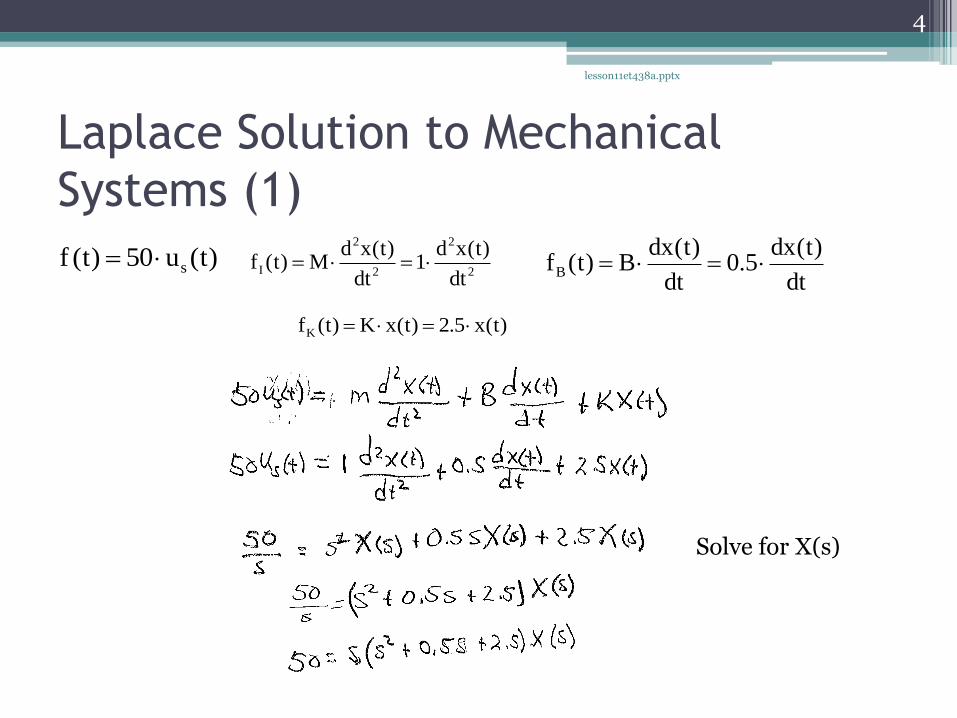
Laplace Solution to Mechanical
Systems (1)
lesson11et438a.pptx
4
)t(u50)t(f s2
2
2
2
Idt
)t(xd1
dt
)t(xdM)t(f
dt
)t(dx5.0
dt
)t(dxB)t(fB
)t(x5.2)t(xK)t(fK
Solve for X(s)
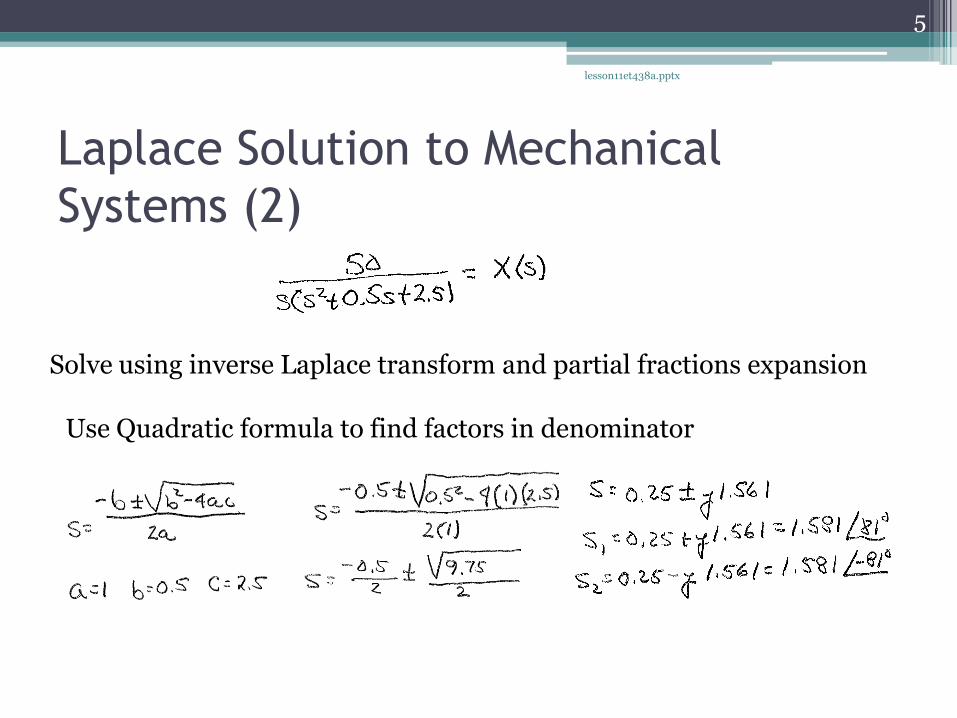
Laplace Solution to Mechanical
Systems (2)
lesson11et438a.pptx
5
Solve using inverse Laplace transform and partial fractions expansion
Use Quadratic formula to find factors in denominator
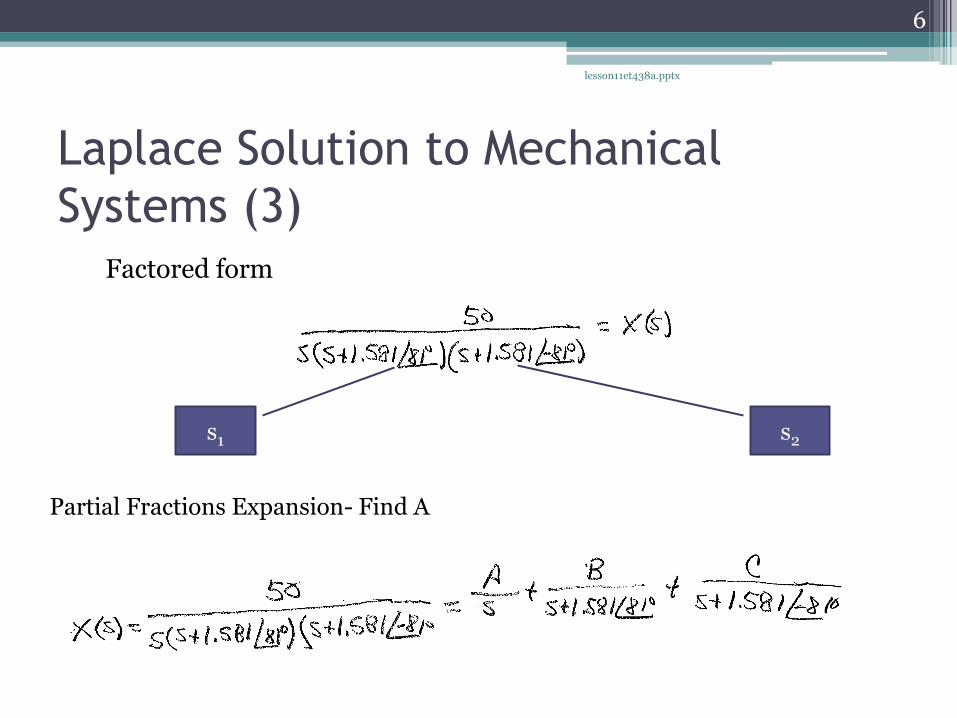
Laplace Solution to Mechanical
Systems (3)
lesson11et438a.pptx
6
Factored form
s2 s1
Partial Fractions Expansion- Find A
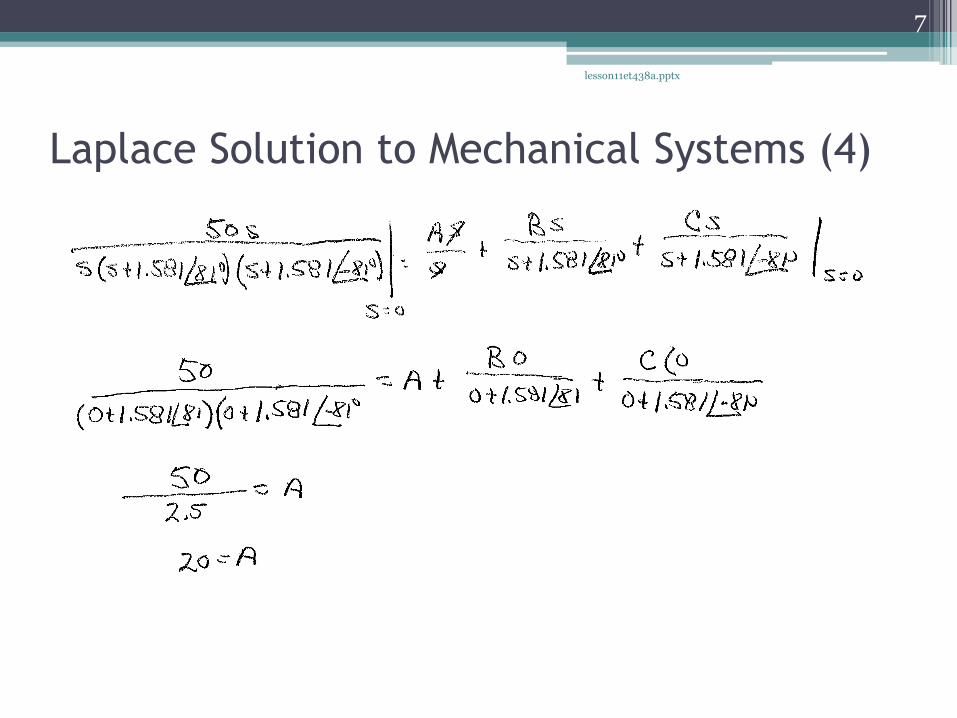
Laplace Solution to Mechanical Systems (4)
lesson11et438a.pptx
7
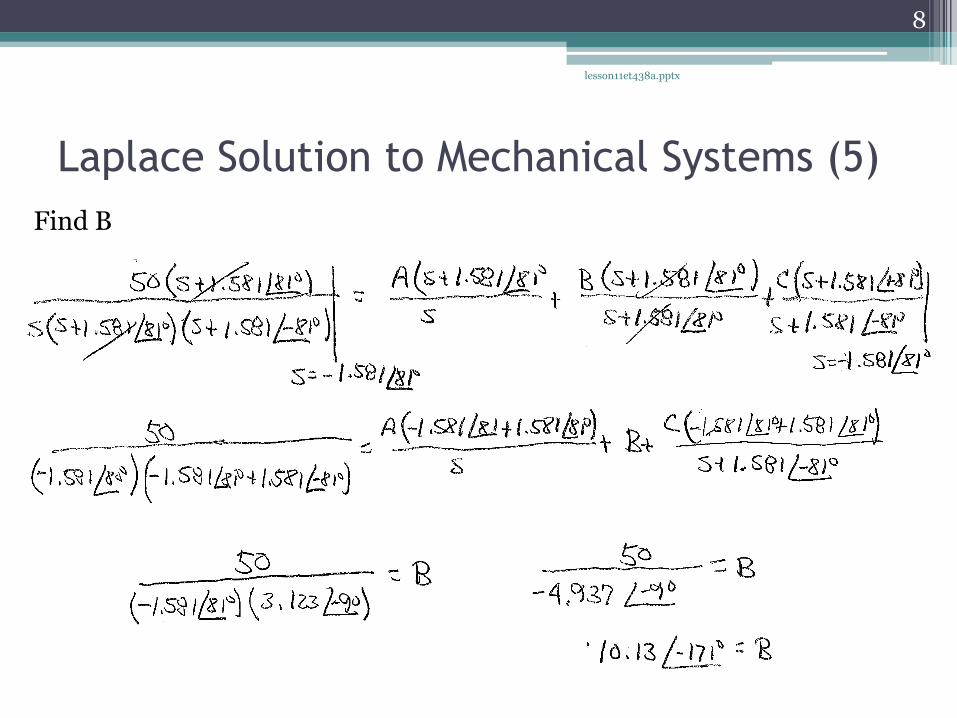
Laplace Solution to Mechanical Systems (5)
lesson11et438a.pptx
8
Find B
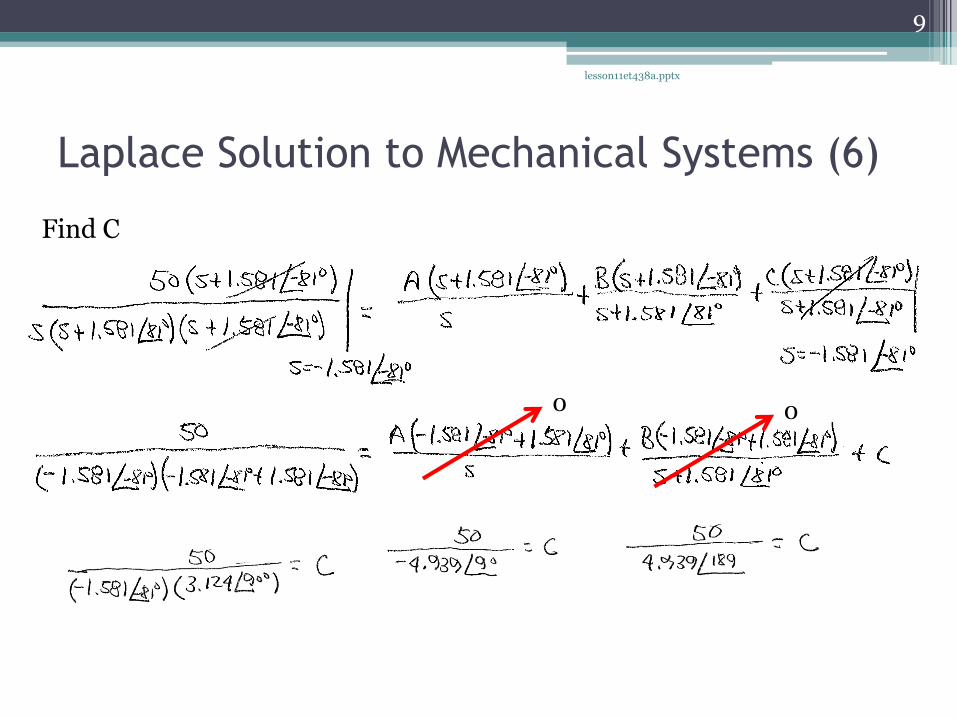
Laplace Solution to Mechanical Systems (6)
lesson11et438a.pptx
9
Find C
0 0
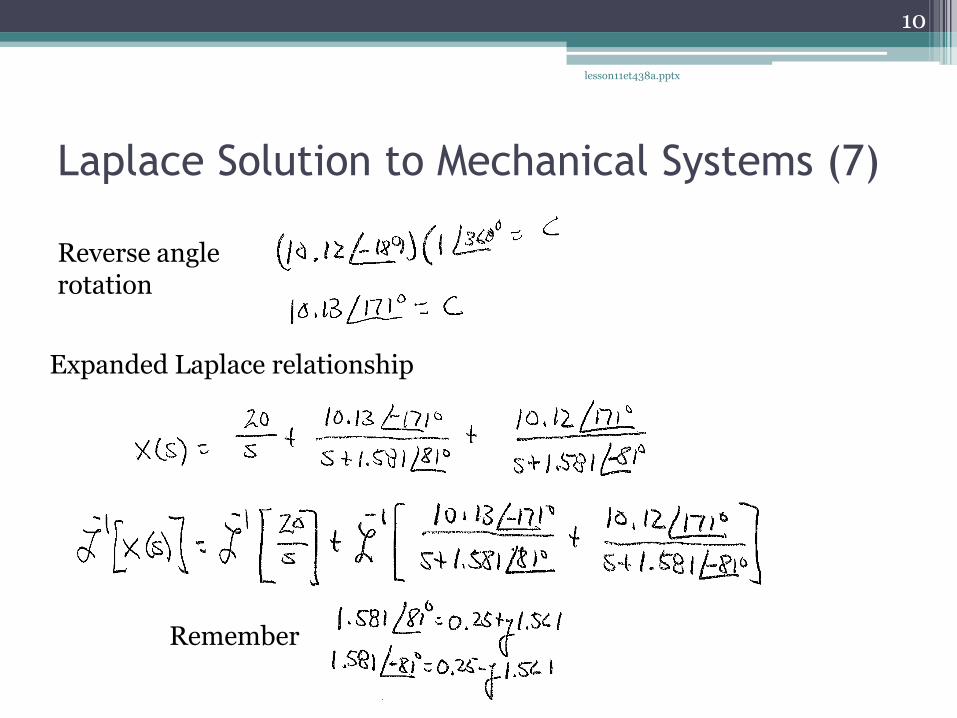
Laplace Solution to Mechanical Systems (7)
lesson11et438a.pptx
10
Reverse angle rotation
Expanded Laplace relationship
Remember
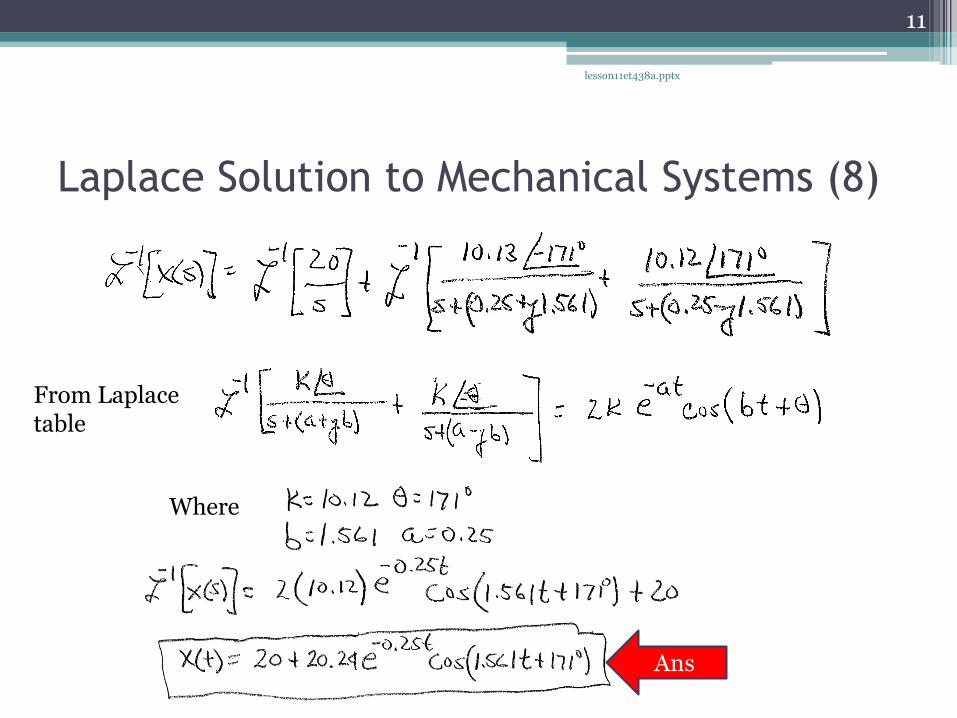
Laplace Solution to Mechanical Systems (8)
lesson11et438a.pptx
11
From Laplace table
Where
Ans
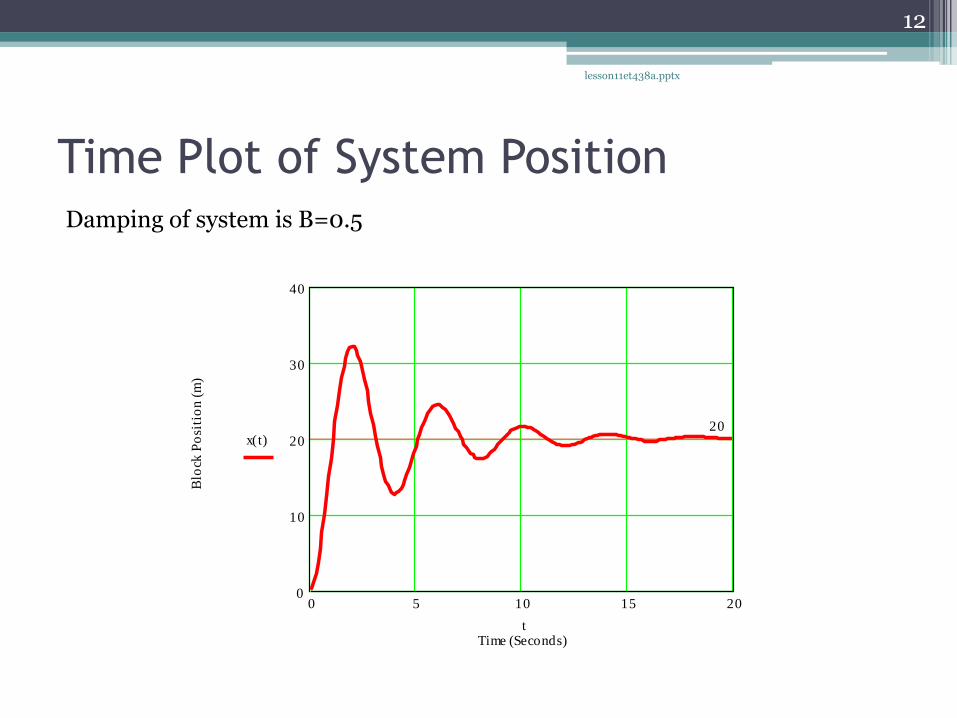
Time Plot of System Position
lesson11et438a.pptx
12
0 5 10 15 200
10
20
30
40
Time (Seconds)
Blo
ck P
osi
tio
n (
m)
20x t( )
t
Damping of system is B=0.5
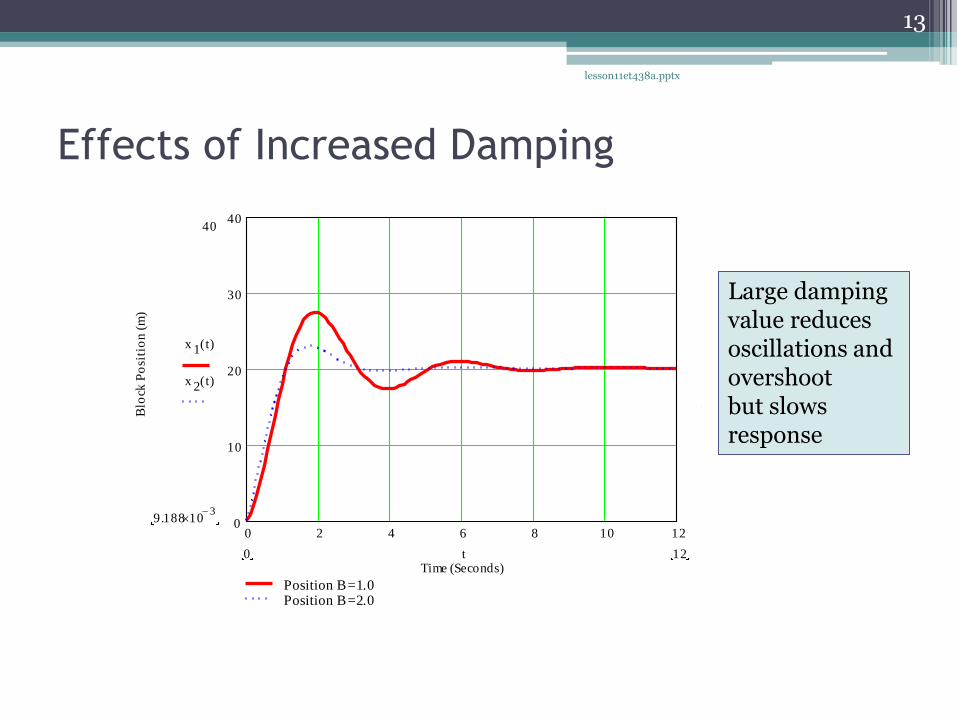
Effects of Increased Damping
lesson11et438a.pptx
13
0 2 4 6 8 10 120
10
20
30
40
Position B=1.0Position B=2.0
Time (Seconds)
Blo
ck P
osi
tio
n (
m)
40
9.188 103
x 1 t( )
x 2 t( )
120 t
Large damping value reduces oscillations and overshoot but slows response
ET 438a Automatic Control Systems Technology
lesson11et438a.pptx
14