Embed Size (px)
DESCRIPTION
Lesson 19. Cargo handling equipment ( 货物装卸设备 ). The various items of machinery and equipment can be found outside of the machinery space. These include deck machinery such as mooring equipment ( 系缆设备 ), anchor handling equipment ( 抛锚设备 ), cargo handling equipment and hatch covers ( 舱口盖 ). - PowerPoint PPT Presentation
Citation preview

Lesson 19
– Cargo handling equipment
• (货物装卸设备 )

• The various items of machinery and equipment can be found outside of the machinery space.

• These include deck machinery such as mooring equipment(系缆设备 ), anchor handling equipment(抛锚设备 ), cargo handling equipment and hatch covers(舱口盖 ).

• Other items include lifeboats(救生艇 ) and liferafts(救生筏 ), emergency equipment, watertight doors, valve actuator, stabilizers(减摇装置 ) and bow thrusters(船头推进器 ).

• The cargo handling equipment will now be described.

• Cargo winches are used with various derrick(吊杆 ) systems arranged for cargo handling.

• The unit is rated according to the safe working load to be lifted and usually has a double speed provision(装置 ) when working at half load.

• In the cargo winch, spur reduction gearing transfers the motor drive to the barrel shaft.

• A warp end(卷绕端 ) may be fitted for operating the derrick topping lift (顶牵索 ) (the wire which adjusts the derrick height).

• Manually operated band brakes may be fitted and the drive motor will have a brake arranged to fail-safe(故障保护 ), i.e. it will hold the load if power fails or the machine is stopped.

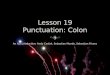
• A derrick rig(装置 ) is known as ‘union purchase’(双杆联吊装置 ).

• One derrick is positioned over the quayside and the other almost vertically over the hold(货舱 ).

• Topping wires fix the height of the derricks and stays(稳索 ) to the deck may be used to prevent fore and aft movement.

Winches
Derricks
Topping wires
Cargo handlingwires

• Cargo handling wires run from two winches and join at the hook.

• A combination of movements from two winches enables lifting, transferring and lowering of the cargo.

• Cranes have replaced derricks on many modern ships.

• Positioned between the holds, often on a plateform which can be rotated through 360°, the deck crane provides an immediately operational unit requiring only one man to operate it.

• Various types of crane exist for particular duties.

• In a general cargo crane, three separate drives provide the principal movements:

• a hoisting(起升 ) motor for lifting the load, a luffing(变幅 ) motor for raising or lowering the jib(boom), and a slewing(旋转 ) motor for rotating the crane.

• The crane is usually mounted on a pedestal(底座 ) to offer adequate visibility to the operator.

• For occasional heavy loads, two cranes can be arranged to work together.

• The operating medium for deck crane motors may be hydraulic or electric.

• The use of hydraulic drives in cranes, winches and similar equipment is now accepted as a conventional method of drive in many case.

• Many reasons can be suggested for the use of hydraulic systems in marine engineering:

• a) A convenient method of transferring power over relatively long distances from, say, a central pump room to remote operating sites.

• b) Fully variable speed control of both linear and rotary motion, with good ‘inching’ capability and smooth take up of load.

• c) High static forces or torques can be achieved and maintained indefinitely(无限期地 ).

• d) Complete safety and reliability is assured under the most difficult environmental conditions;

• overload conditions are safeguarded by using a relief valve to limit maximum output torques or forces.

• The wide range of high torque, low speed motors are available for driving winch drums directly so dispensing with(免除 ) the need to fit reduction gearing.

• Motors of this type are more common on larger cranes where reduction gearboxes would be expensive.

• All fixed capacity motors, whether high or low speed, require a high flow at low pressure to obtain high light hook speeds and consequent short cycle times.

• With large cranes this can become an embarrassment and one solution with low speed motors is to use the two speed type to double the speed and half the output torque at light hook load.

• High speed motors with reduction gearing have the advantage that the brake can be mounted on the high speed shaft and so be much smaller and cheaper.

• Because of the availability of standard low cost gearboxes this arrangement is popular on light cranes.

• Variable capacity axial piston motors have the important advantage that light hook speeds can be increased up to four times from a given oil flow by reducing the motor capacity to 25 per cent of the maximum.

Hydraulic Crane
• The hoisting of the cargo is effected by a hoisting winch driven by a hydraulic motor that

• that provides a constant torque in both directions of rotation and at all speeds within the regulation range of the motor.

• The winch is equipped with a mechanical belt brake that acts on the outside of the rotating motor housing.

• During operation, the brake is released by means of oil pressure which compresses a spring.

• The crane jib is raised and lowered by means of a luffing winch which is constructed in a similar manner to the hoisting winch.

• The pumps are axial piston pumps and are driven by a common 3-phased synchronous motor(三相同步电动机 ) at a constant speed of rotation.

• The capacity of the pump is changed by turning the swashplate.

• The crane is turned by a hydraulic motor of the same type as that described above, in that the rotor turns a pinion which engages with a toothed ring on the crane housing.

• An oil cooler is used to remove the heat generated in the oil during the operation of the crane.

• The system is also provided with a preheater for heating the oil in cold weather.

• If the temperature of the oil reaches 85oC, a thermostat(温度调节装置 ) in one of the oil lines switches off the electric motor.

• Pressure relief valves are built into the system to protect the system and the crane against excessive loads.

• All moving parts in the hydraulic system are lubricated by means of the oil in the system.

• The crane housing, which is a welded construction on a rigid baseplate, contains all the mechanical machinery, the hydraulic system and the electric equipment.

• The tops of the crane housing and the jib carry blocks(滑轮组 ) for wires for the hoisting of the cargo and the raising of the jib.

• All of the blocks have enclosed ball bearing.

• Both the luffing winch and the winch for turning the crane are operated from the same control handle.

• A small movement of this control handle either forwards or backwards results in the build up of oil pressure in the control oil line and the piston in the brake cylinder releases the brake.

• Movement of the control handle further than the position for releasing the brake starts the luffing winch.

• The crane jib is raised or lowered by moving the control handle backwards or forwards respectively.

• The speed at which the jib is raised or lowered is proportional to the distance the handle is moved.

• Changes in speed are effected by changing the pressure of the oil that is supplied to the control cylinder and which regulates the pump by means of a servomotor(伺服电动机 [马达 ]).

• This changes the oil flow and thus the speed of the rotor in the hydraulic motor.

• The safety system consists of: a main safety valve; two pressure reducing valves.

• The slewing winch, which is almost identical to luffing winch, is controlled by using the same handle as that used for the luffing winch.

• A small movement of the control handle to the right or left gives rise to oil pressure in the brake cylinder and releases the brake on the slewing winch.

• Movement of the control handle to the right or left in excess of the positions that release the brake starts the crane moving to the right or left respectively.

• The closed hydraulic system consists of an axial piston pump with variable output and a hydraulic motor mutually connected through oil pressure lines.

• The amount of oil flowing through the system and the direction of flow are regulated by means of a servomotor.

• When in operation, it is unavoidable that a small amount of oil escapes through leakage, and in order to compensate for these leaks the system is connected to a feed pump.

• For pumping up, two check valves are used, and a bypass valve limits the pressure to 17-25 bar.

• The safety system is designed for a certain maximum pressure, and the working pressure must therefore be limited.

• For this reason there is included a main relief valve that connects the pressure side of the system to its suction side if the permissible pressure is exceeded.

• A double check valve with a common spring ensures that the relief valve always operates, regardless of which of the oil lines is the pressure side.

Reading materials
• Mooring equipment
• (系泊,系缆设备 )

• Winches with various arrangements of barrels are the usual mooring equipment used on board ships.

• It usually consists of a driving motor, a reduction gear, a winch barrel or drum and one or two warp ends.

• The winch barrel or drum is used for hauling in(拖 ) or letting out(放 ) the wires or ropes which will fasten the ship to the shore.

• The warp end is used when moving the ship using ropes or wires fastened to bollards(系船柱 ) ashore and wrapped around the warp end of the winch.

• The motor drive is passed through a spur gear transmission, a clutch(离合器 ) and thus to the drum and warp end.

• A substantial frame supports the assembly and a band brake is used to hold the drum when required.

• The control arrangements for the drive motor permit forward or reverse rotation together with a selection of speeds during operation.

Mooring Winch
• Mooring winches provide the facility for tensioning(拉紧 , 使紧张 ) the wire up to the stalling capacity of the winch, usually 1.5 times full load,

• thereafter the load is held by the prime mover brake or barrel brake when the power is shut off.

• The winch cannot pay out wire unless the brake is overhauled or recover wire unless manually operated, thus wires may become slack.

• Automatic mooring winches provide the manual control previously described but in addition incorporate control features such that,

• in the 'automatic' setting, the winch may be overhauled and wire is paid off the barrel at a pre-determined maximum tension;

• also wire is recovered at a lower tension should it tend to become slack(松弛 ).

• Thus there is a certain range of tension, associated with each step of automatic control, when the wire is stationary.

• It is not practical to reduce this range to the minimum possible as this result in hunting(振荡,不稳定 ) of the controls.

• It should be noted that the principal reason for incorporating automatic controls with the features described is to limit the render(绞上,拖 ) value of the winch and avoid broken wires;

• also to prevent mooring wires from becoming slack.

• Load sensing devices are used with automatic mooring winches, e.g. spring-load gearwheels and torsion bars are widely used with steam and electric winches;

• fluid pressure sensing either steam or hydraulic oil pressure, is also used where appropriate.

• The majority of automatic mooring winches are spur geared to improve the backward efficiency of the gear train(齿轮系 ) for rendering,

• the gearing and bearings being totally enclosed and lubricated from the oil sump.

• On larger mooring winches where a barrel brake is fitted, it is now common practice to design the brake to withstand the breaking strength(断裂强度或负荷 ) of the mooring wire.

• Worm geared (蜗杆传动的 ) automatic mooring winches are uncommon as the multi-start(多头 ) feature required to improved gear efficiency reduces the advantage of worm gear i.e. the high gear ratio.

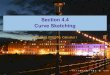
• B. Anchor handling equipment• (抛锚设备 )

• The windlass(锚机 ) is the usual anchor handling device where one machine may be used to handle both anchors.

• A more recent development, particularly on larger vessels, is the split(分离的 ) windlass where one machine is used for each anchor.

Chain or cable locker
Spurling pipe
Cable lifter
Anchor

• The rotating units of a split windlass consist of a cable lifter(锚链轮 ) with shaped snug(凸起 ) to grip the anchor cable,

• a mooring drum for paying out or letting go of mooring wires and a warp end for warping duties.

• Each of these unites may be separately engaged or disengaged by means of a dog clutch(爪形离合器 ), although the warp end is often driven in association with the mooring drum.

• A spur gear assembly transmits the motor drive to the shaft where the various dog clutches enable the power take-off.

• Separate band brakes are fitted to hold the cable lifter and the mooring drum when the power is switched off.

• The cable lifter unit is mounted so as to raise and lower the cable from the spurling pipe(锚链管 ), which is at the top and center of the chain or cable locker(锚链舱 ).

• Anchor capstans(起锚绞盘 ) are used in some installations where the cable lifter rotates about a vertical axis.

• Only the cable lifter unit is located on deck, the driving machinery being on the deck below.

• C. Preliminaries(准备工作 ) for operating the hydraulic deck machinery

Filling the deck machinery with oil
• Oil specially made for operation of hydraulic pump, hydraulic motor and hydraulic equipment should be used.

• In case such oil is not available, turbine oil of a good quality may be used.

• Use of water, light oil, heavy oil, animal or vegetable oil and also ordinary machine oil is strictly prohibited.

• Leakage of oil or stick of the moving parts of pumps will be caused by less viscosity and excessive friction losses or noise of pumps will be caused by higher viscosity.

• When starting up the pump, viscosity of the oil should not exceed 2000cst, but it shall always be over 15cst.

• After checking up the oil, fill the system as following:

• 1. Fill the head tank with oil by the hand pump.
• 2. Open the air vent valves (hyd. Pump, hyd. Motor, strainer, oil cooler, control valve, piping)

• 3. Close the air vent valves after the system is filled up with oil.

Preliminary operation of the system
• 1. Prior to running the pump, examine the system carefully and:

• a). Ensure that the lever of control valve is in neutral position.
• b). Ensure that all the valves are set in normal position.

• c). Confirm the suction pressure above 0.7kg/cm2, fill the head tank with oil if necessary.

• d). Confirm the oil temperature above the value corresponding to the oil viscosity of 450cst.

• In case of the oil viscosity above 450cst,• (i) Open the stop valve for warming up of
pump unit.• (ii) Inch the electric motor twice.

• (iii) Run the electric motor.• (iv) Close the stop valve.

• e). Apply gear oil.
• f). Grease up bearing metal and linkage.

• 2. After satisfying the above instruction, start up the electric motor and run the pump, and expel(放出 ) air in the circuit.

• 3. Check whether noise or vibration of the hydraulic pump is normal or not.