Embed Size (px)
DESCRIPTION
Levels of Detail. COMP 770 3/25/09. Problem. Models can be very detailed Look great when close up Last week we explored one way of attacking this problem. 13M Triangles. 1M Triangles. 8M Elevation Points. Problem. Q: Why else might we want to reduce the working set size?. - PowerPoint PPT Presentation
Citation preview
Levels of DetailLevels of Detail
COMP 770COMP 770
3/25/093/25/09
ProblemProblem
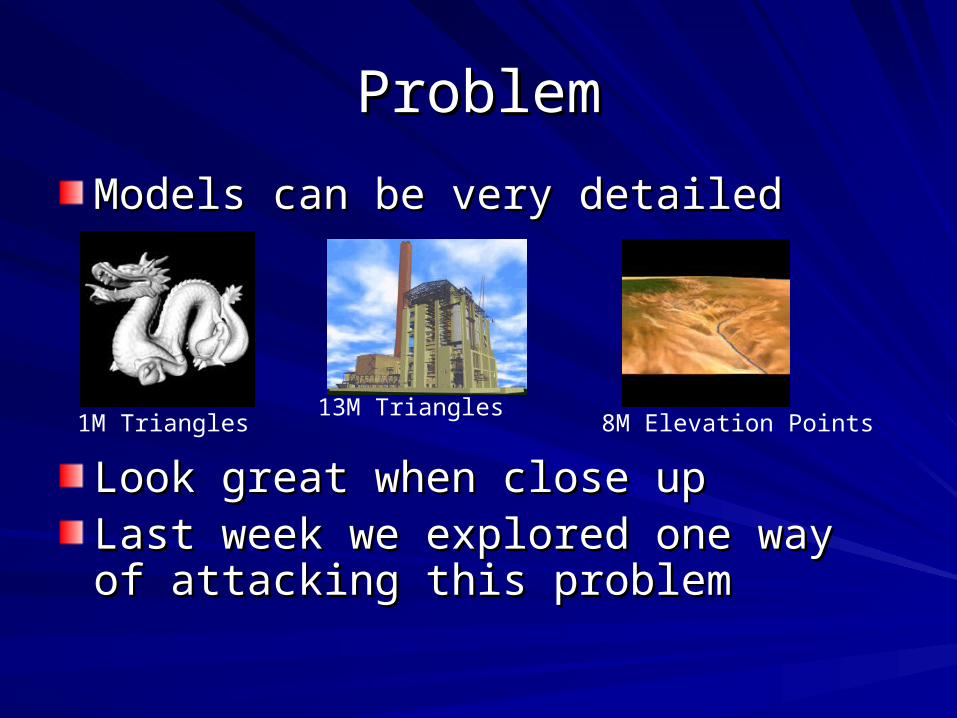
Models can be very detailedModels can be very detailed
Look great when close upLook great when close upLast week we explored one way of Last week we explored one way of attacking this problemattacking this problem
13M Triangles8M Elevation Points1M Triangles
ProblemProblem
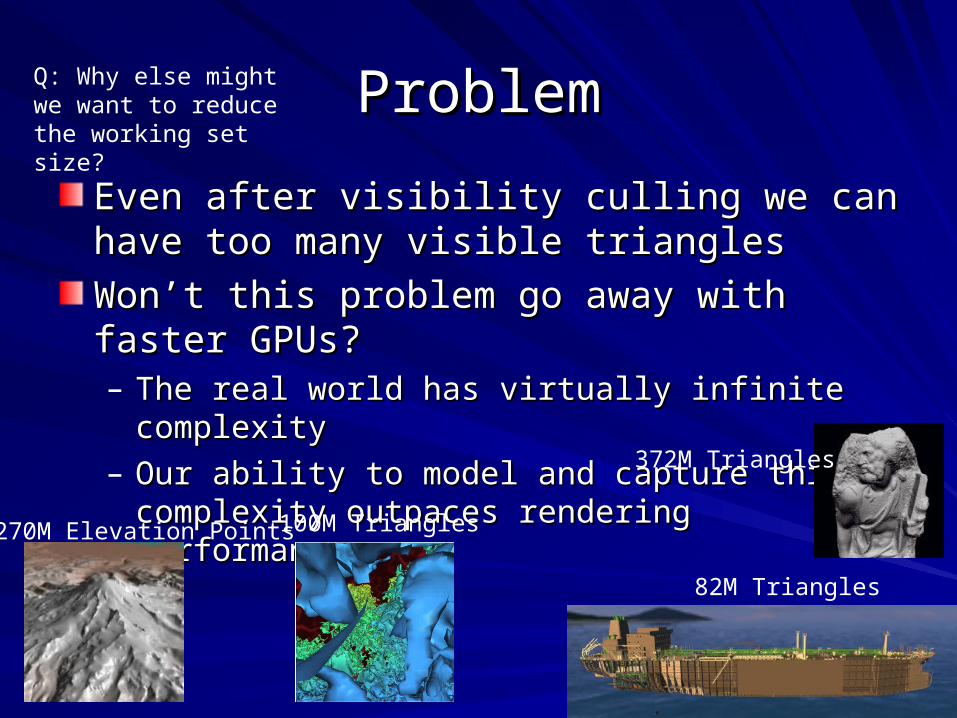
Even after visibility culling we can have too many Even after visibility culling we can have too many visible trianglesvisible triangles
Won’t this problem go away with faster GPUs?Won’t this problem go away with faster GPUs?– The real world has virtually infinite complexityThe real world has virtually infinite complexity– Our ability to model and capture this complexity Our ability to model and capture this complexity
outpaces rendering performanceoutpaces rendering performance
270M Elevation Points
82M Triangles
100M Triangles
372M Triangles
Q: Why else might we want to reduce the working set size?
Levels of DetailLevels of Detail
Basic Idea: Render using fewer triangles Basic Idea: Render using fewer triangles when model is farther from viewerwhen model is farther from viewer
Methods:Methods:– Multi-resolution modelingMulti-resolution modeling
RemeshingRemeshing
Parametric SurfacesParametric Surfaces
Subdivision SurfacesSubdivision Surfaces
– Polygonal SimplificationPolygonal Simplification– Image ImpostorsImage Impostors
LOD HierarchyLOD Hierarchy
[Clark76] First LOD paper[Clark76] First LOD paper– Replace each object in the scene graph with a Replace each object in the scene graph with a
hierarchy of objects at differing resolutionshierarchy of objects at differing resolutions– Select LOD based on size of screen-space Select LOD based on size of screen-space
projectionprojection
Integrates VFC with LOD searchIntegrates VFC with LOD searchSupports out-of-core renderingSupports out-of-core renderingMost LOD systems today are based on Most LOD systems today are based on this basic conceptthis basic concept
Polygonal SimplificationPolygonal Simplification
Method for reducing the polygon count of meshMethod for reducing the polygon count of meshLocal Operators:Local Operators:– Vertex ClusteringVertex Clustering– Vertex RemovalVertex Removal– Edge CollapseEdge Collapse– Triangle CollapseTriangle Collapse
Global Operators:Global Operators:– Low-Pass FilteringLow-Pass Filtering– Morphological OperatorsMorphological Operators– Alpha-HullAlpha-Hull
Vertex ClusteringVertex Clustering
[Rossignac & Borrel 93][Rossignac & Borrel 93]Weight vertices by:Weight vertices by:– Inverse of max angle between edges (why?)Inverse of max angle between edges (why?)– Size of largest adjacent face (why?)Size of largest adjacent face (why?)
Impose a grid on the modelImpose a grid on the modelCompute weighted average vertex in each cellCompute weighted average vertex in each cellTriangles become:Triangles become:– TrianglesTriangles– LinesLines– PointsPoints
Keep the unique primitivesKeep the unique primitives
Vertex ClusteringVertex Clustering
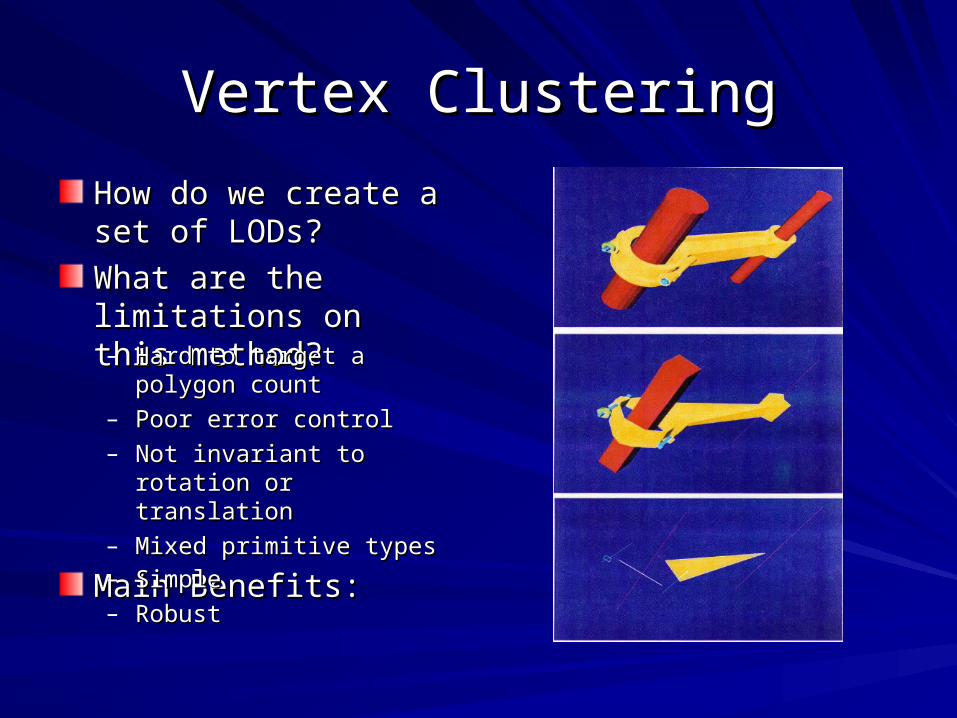
How do we create a set How do we create a set of LODs?of LODs?
What are the limitations What are the limitations on this method?on this method?
Main Benefits:Main Benefits:
– Hard to target a polygon countHard to target a polygon count
– Poor error controlPoor error control
– Not invariant to rotation or Not invariant to rotation or translationtranslation
– Mixed primitive typesMixed primitive types
– SimpleSimple
– RobustRobust
Vertex ClusteringVertex Clustering
[Low & Tan 97][Low & Tan 97]
Improve on R&B in a several ways Improve on R&B in a several ways including:including:– Floating-cell clusteringFloating-cell clustering– Improved angle weight [draw it]Improved angle weight [draw it]– Rendering using thick linesRendering using thick lines
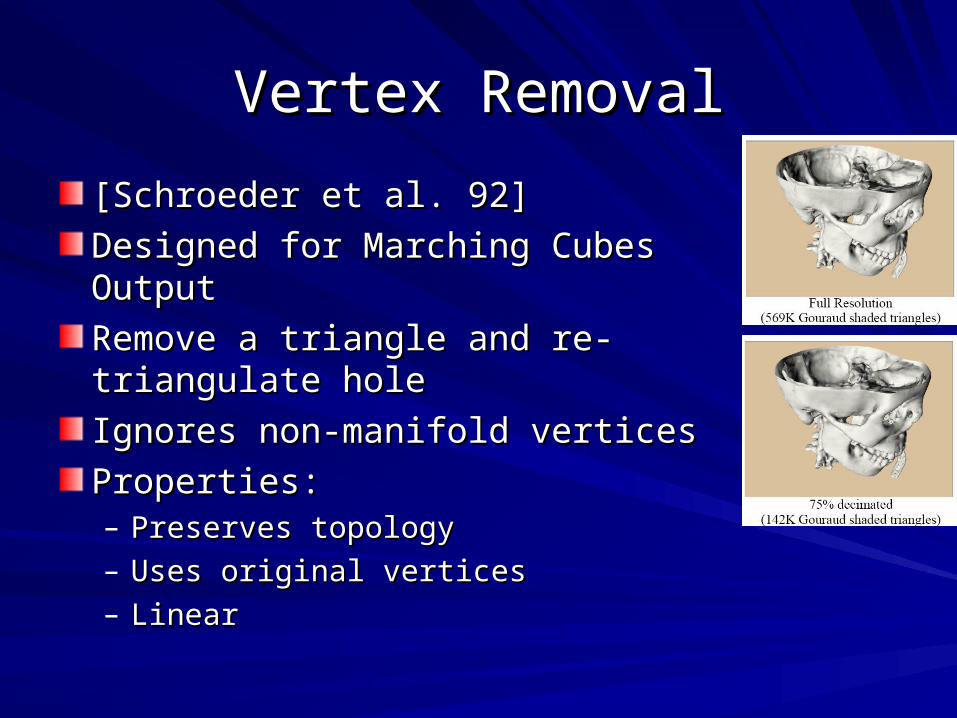
Vertex RemovalVertex Removal
[Schroeder et al. 92][Schroeder et al. 92]
Designed for Marching Cubes OutputDesigned for Marching Cubes Output
Remove a triangle and re-triangulate Remove a triangle and re-triangulate holehole
Ignores non-manifold verticesIgnores non-manifold vertices
Properties:Properties:– Preserves topologyPreserves topology– Uses original verticesUses original vertices– LinearLinear
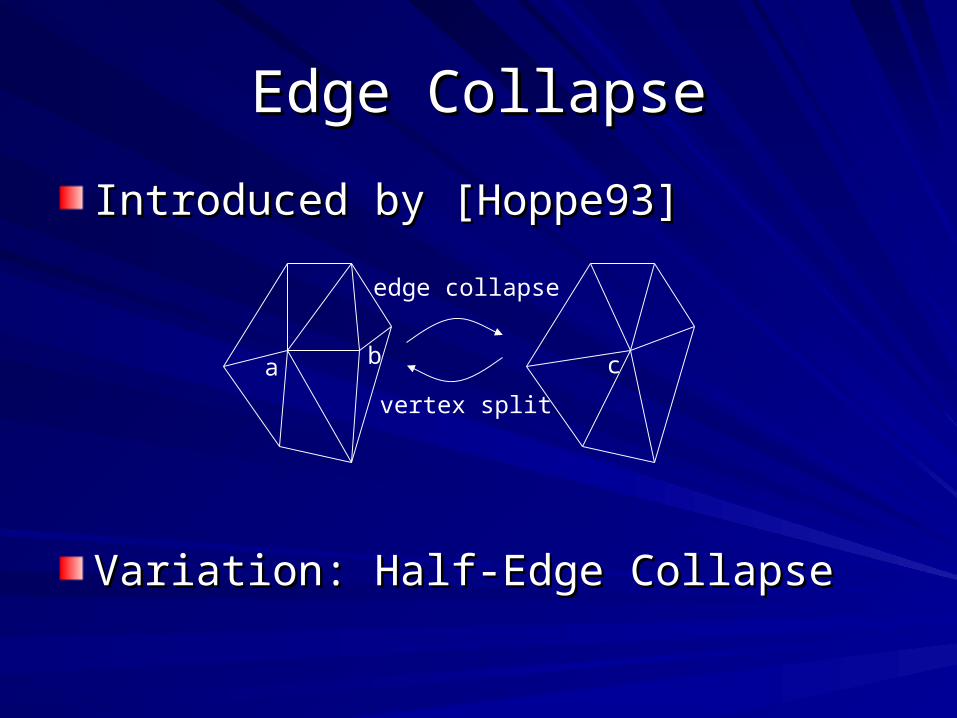
Edge CollapseEdge Collapse
Introduced by [Hoppe93]Introduced by [Hoppe93]
Variation: Half-Edge CollapseVariation: Half-Edge Collapse
a b c
edge collapse
vertex split
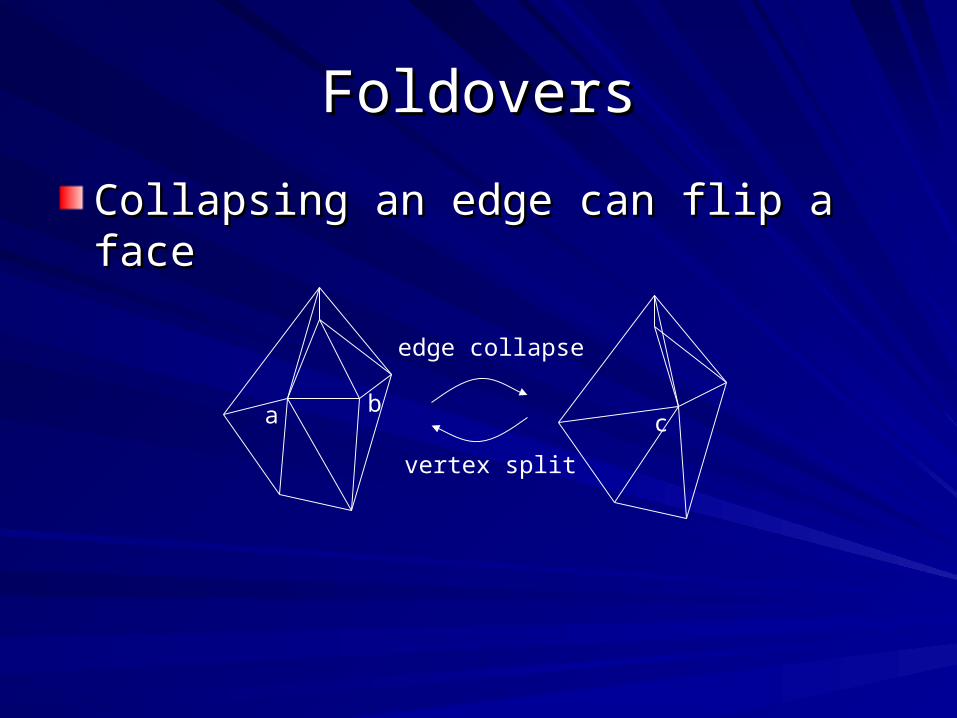
FoldoversFoldovers
Collapsing an edge can flip a faceCollapsing an edge can flip a face
a bc
edge collapse
vertex split
Virtual Edge CollapseVirtual Edge Collapse
Extension of edge collapse to two vertices Extension of edge collapse to two vertices not connected by an edgenot connected by an edge
Allows topological simplificationAllows topological simplification
Also known as vertex-pair collapseAlso known as vertex-pair collapse
Usually limited to small distance to avoid Usually limited to small distance to avoid O(nO(n22) virtual edges) virtual edges
Edge CollapseEdge Collapse
Allows geomorphsAllows geomorphs
Fine-grained: 2 triangles removed for Fine-grained: 2 triangles removed for manifold casemanifold case
Topology preservingTopology preserving
Half-edge collapse preserves vertex setHalf-edge collapse preserves vertex set
Low-Pass FilteringLow-Pass Filtering
[He et al. 96][He et al. 96]
Convert polygon mesh to volumetric Convert polygon mesh to volumetric representationrepresentation
Apply low-pass filter to volumetric dataApply low-pass filter to volumetric data
Reconstruct the mesh using marching Reconstruct the mesh using marching cubescubes
Morphological OperatorsMorphological Operators
[Nooruddin99][Nooruddin99]
Convert polygon mesh to volumetric Convert polygon mesh to volumetric representationrepresentation
Apply dilation operator followed by erosion Apply dilation operator followed by erosion operator operator
Reconstruct with marching cubesReconstruct with marching cubes
Apply polygonal simplifcationApply polygonal simplifcation
Topological Simplification Using Topological Simplification Using Alpha-HullsAlpha-Hulls
[El-Sana and Varshney 98][El-Sana and Varshney 98]
Definition:Definition:– Set of points PSet of points P– Spherical ball b with radius alphaSpherical ball b with radius alpha– If b is placed such that it does not intersect P If b is placed such that it does not intersect P
it is emptyit is empty– The alpha-hull is the complement of empty The alpha-hull is the complement of empty
ballsballs
Topological Simplification Using Topological Simplification Using Alpha-HullsAlpha-Hulls
Intuitively, we roll a ball around the points to Intuitively, we roll a ball around the points to define the new surfacedefine the new surface
If the ball does not fit into a concavity it is filledIf the ball does not fit into a concavity it is filled
If the ball does not fit in to a hole it is closedIf the ball does not fit in to a hole it is closed
If the ball does not fit between two objects it is If the ball does not fit between two objects it is closedclosed
What if alpha=0?What if alpha=0?
What if alpha=infinity?What if alpha=infinity?
Show paper imagesShow paper images
Discrete LODDiscrete LOD
Use local or global operators to compute a set of Use local or global operators to compute a set of LOD meshesLOD meshes
At runtime select an LOD mesh and render itAt runtime select an LOD mesh and render it
Possible Criteria:Possible Criteria:– Distance to userDistance to user– Fraction visibleFraction visible– EccentricityEccentricity– Visual ImportanceVisual Importance
Extension: HLODS [Erikson01]Extension: HLODS [Erikson01]
Continuous LODContinuous LOD
Progressive Meshes [Hoppe96]Progressive Meshes [Hoppe96]Iteratively decimate a mesh using edge Iteratively decimate a mesh using edge collapse operatorcollapse operatorStore the inverse vertex split for each Store the inverse vertex split for each collapsecollapseThe most simplified mesh (base mesh) The most simplified mesh (base mesh) and vsplit records form the progressive and vsplit records form the progressive mesh:mesh:
MM00→M→M1 1 →… → M→… → Mnn
Continuous LODContinuous LOD
Rather than a few discrete LODs we have Rather than a few discrete LODs we have a full rangea full range
Vertex split does not require much storageVertex split does not require much storage
Can geomorph between LODsCan geomorph between LODs
Show videoShow video
View-Dependent LODView-Dependent LOD
So far we have:So far we have:– Discrete LOD: fixed models at various Discrete LOD: fixed models at various
fidelitiesfidelities– Continuous LOD: a progression of meshes Continuous LOD: a progression of meshes
from coarse to finefrom coarse to fine
Consider a case like this:Consider a case like this:
View-Dependent LODView-Dependent LOD
Create an LOD representation at runtime Create an LOD representation at runtime according to view-parametersaccording to view-parameters
What view-dependent criteria can we use?What view-dependent criteria can we use?More detail close to the viewerMore detail close to the viewerPreserve the silhouette of the objectPreserve the silhouette of the objectPreserve specular highlightsPreserve specular highlightsAggressively simplify the backfacesAggressively simplify the backfaces
View-Dependent LODView-Dependent LOD
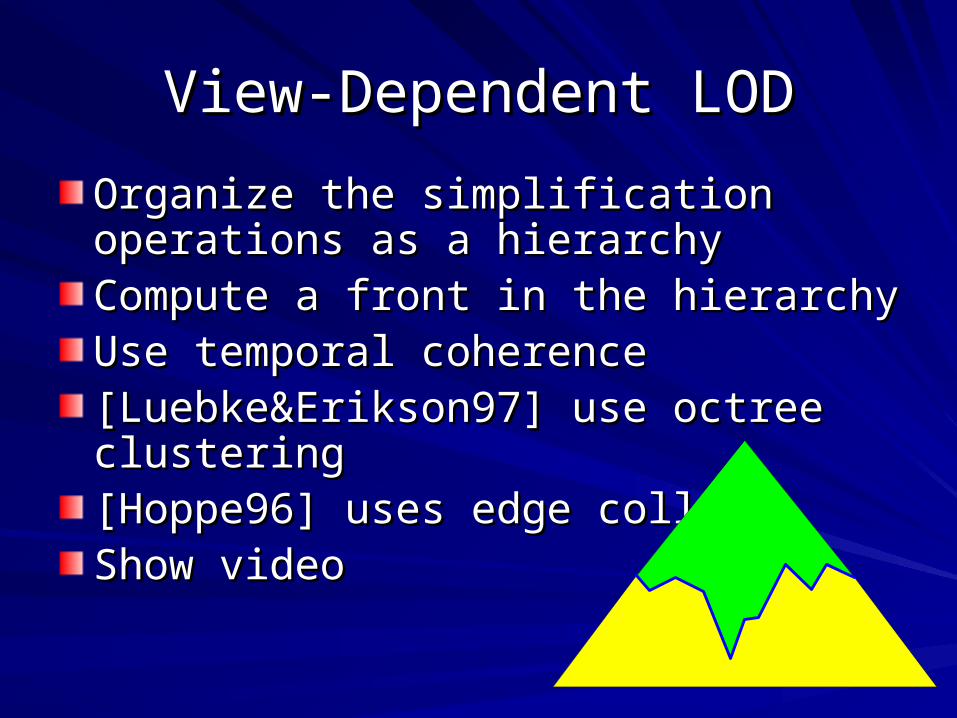
Organize the simplification operations as a Organize the simplification operations as a hierarchyhierarchyCompute a front in the hierarchyCompute a front in the hierarchyUse temporal coherenceUse temporal coherence[Luebke&Erikson97] use octree clustering[Luebke&Erikson97] use octree clustering[Hoppe96] uses edge collapse[Hoppe96] uses edge collapseShow videoShow video
Figure 7. A vertex tree. The blue line represents the boundary. The greenportion of the tree are the unfolded nodes above the boundary. The yellowportion of the tree represents the folded nodes below the boundary.
View-Dependent LODView-Dependent LOD
View-Dependent LOD has fidelity View-Dependent LOD has fidelity advantages but not generally used.advantages but not generally used.
Why?Why?
– Expensive to traverse hierarchy frontExpensive to traverse hierarchy front– Dynamically generated geometry difficult to Dynamically generated geometry difficult to
render optimallyrender optimally
CHPMCHPM
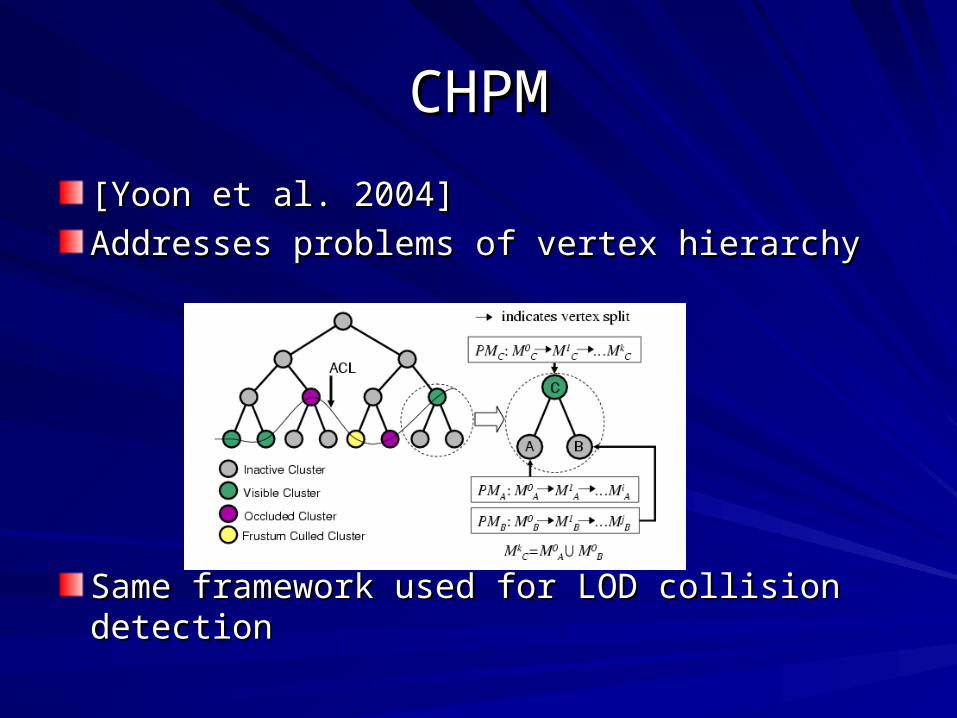
[Yoon et al. 2004][Yoon et al. 2004]
Addresses problems of vertex hierarchyAddresses problems of vertex hierarchy
Same framework used for LOD collision detectionSame framework used for LOD collision detection
CHPMCHPM
Video:Video:– http://gamma.cs.unc.edu/QVDRhttp://gamma.cs.unc.edu/QVDR
Collision:Collision:– http://gamma.cs.unc.edu/MRChttp://gamma.cs.unc.edu/MRC
Simplification ErrorSimplification Error
Why measure error?Why measure error?– Better quality LODBetter quality LOD– Know the quality of the LODKnow the quality of the LOD
Usually, we want to measure appearanceUsually, we want to measure appearanceGenerally, we use a geometric measure as a proxyGenerally, we use a geometric measure as a proxyError measures are used in three ways:Error measures are used in three ways:– To pick which operation to performTo pick which operation to perform– To determine resulting surface from an operation (e.g. position To determine resulting surface from an operation (e.g. position
of replacement vertex)of replacement vertex)– To pick an LOD at runtimeTo pick an LOD at runtime
Two common LOD selection criteria:Two common LOD selection criteria:– Target framerateTarget framerate– Target qualityTarget quality
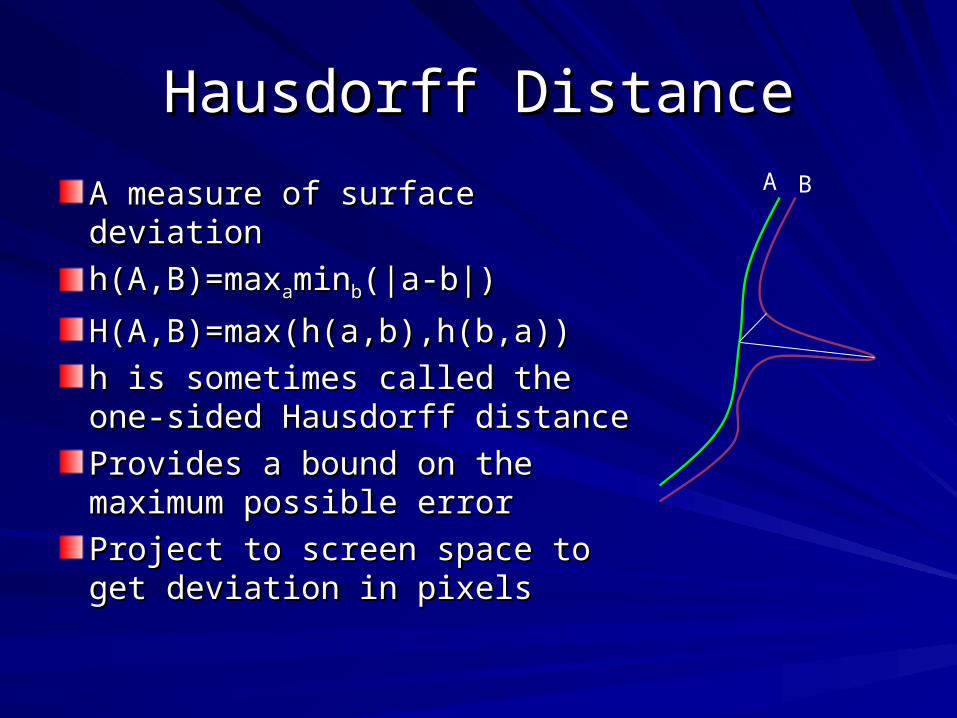
Hausdorff DistanceHausdorff Distance
A measure of surface deviationA measure of surface deviation
h(A,B)=maxh(A,B)=maxaaminminbb(|a-b|)(|a-b|)
H(A,B)=max(h(a,b),h(b,a))H(A,B)=max(h(a,b),h(b,a))
h is sometimes called the one-h is sometimes called the one-sided Hausdorff distancesided Hausdorff distance
Provides a bound on the Provides a bound on the maximum possible errormaximum possible error
Project to screen space to get Project to screen space to get deviation in pixelsdeviation in pixels
A B
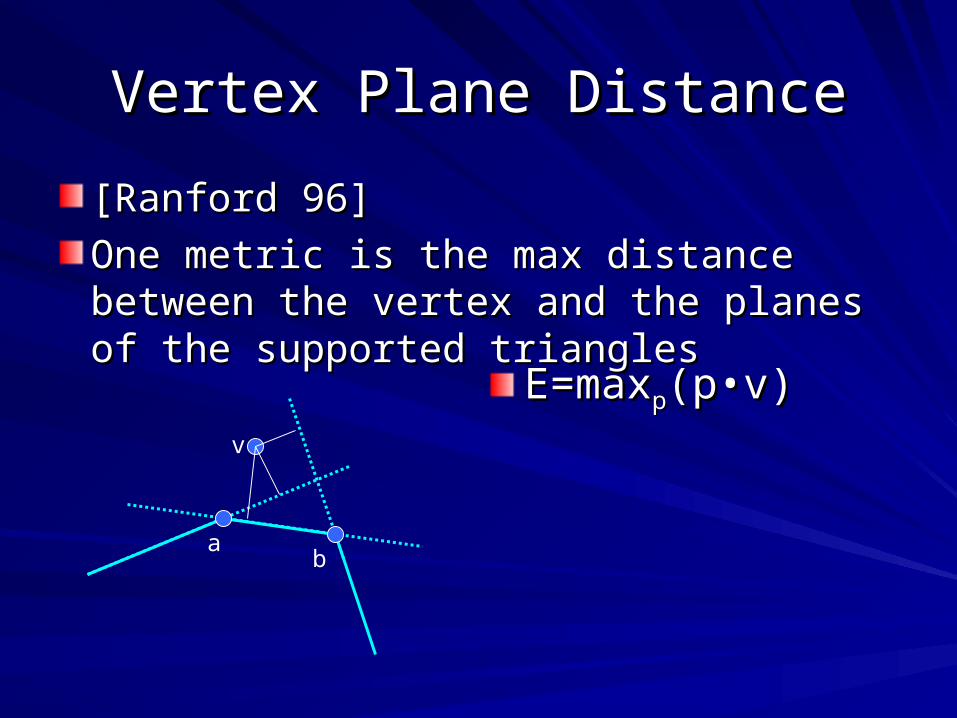
Vertex Plane DistanceVertex Plane Distance
[Ranford 96][Ranford 96]
One metric is the max distance between One metric is the max distance between the vertex and the planes of the supported the vertex and the planes of the supported trianglestriangles E=maxE=maxpp(p(p••v)v)
ab
v
Quadric Error MetricQuadric Error Metric
[Garland & Heckbert 97][Garland & Heckbert 97]Use sum of squared distance rather than Use sum of squared distance rather than max distancemax distanceE=E=(p(p•v)•v)22= = (v(vTTp) (pp) (pTTv)=vv)=vTT[[(p p(p pTT)]v)]v
= v= vTT[[QQpp]v = v]v = vTTQvQv
Additional plane can be incorporated by a Additional plane can be incorporated by a 4x4 matrix addition4x4 matrix additionCost to compute the error given a quadric Cost to compute the error given a quadric and vertex is constantand vertex is constant
AttributesAttributes
Vertices have more than just position:Vertices have more than just position:– ColorsColors– NormalsNormals– Texture CoordsTexture Coords– And now varying input to programsAnd now varying input to programs
Vertices may lie at a discontinuityVertices may lie at a discontinuity– Different TexturesDifferent Textures– Different Material PropertiesDifferent Material Properties– Different ShadersDifferent Shaders
AttributesAttributes
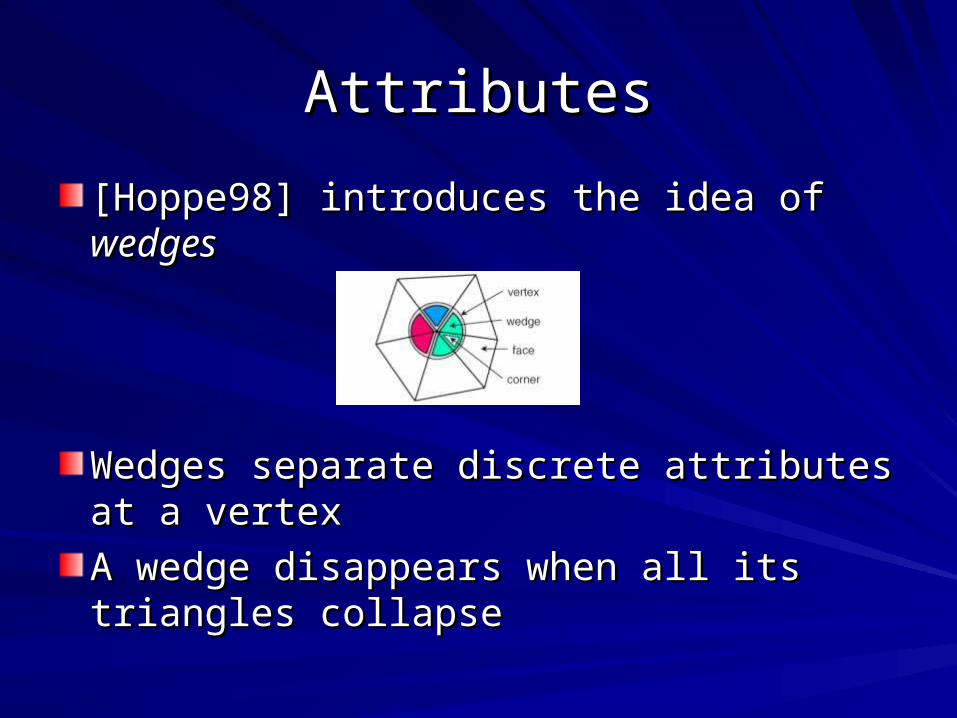
[Hoppe98] introduces the idea of [Hoppe98] introduces the idea of wedgeswedges
Wedges separate discrete attributes at a Wedges separate discrete attributes at a vertexvertex
A wedge disappears when all its triangles A wedge disappears when all its triangles collapsecollapse
AttributesAttributes
Earlier algorithms ignored attributes or simply Earlier algorithms ignored attributes or simply propagated their valuespropagated their valuesCan simply use the same metric as for position:Can simply use the same metric as for position:– Normals in Euclidean spaceNormals in Euclidean space– Colors in RGB spaceColors in RGB space
Better:Better:– Normals in spherical domainNormals in spherical domain– Colors in a perceptually linear color spaceColors in a perceptually linear color space
Generally total error is a weighted sum of Generally total error is a weighted sum of position and attribute errorsposition and attribute errors
Normal conesNormal cones
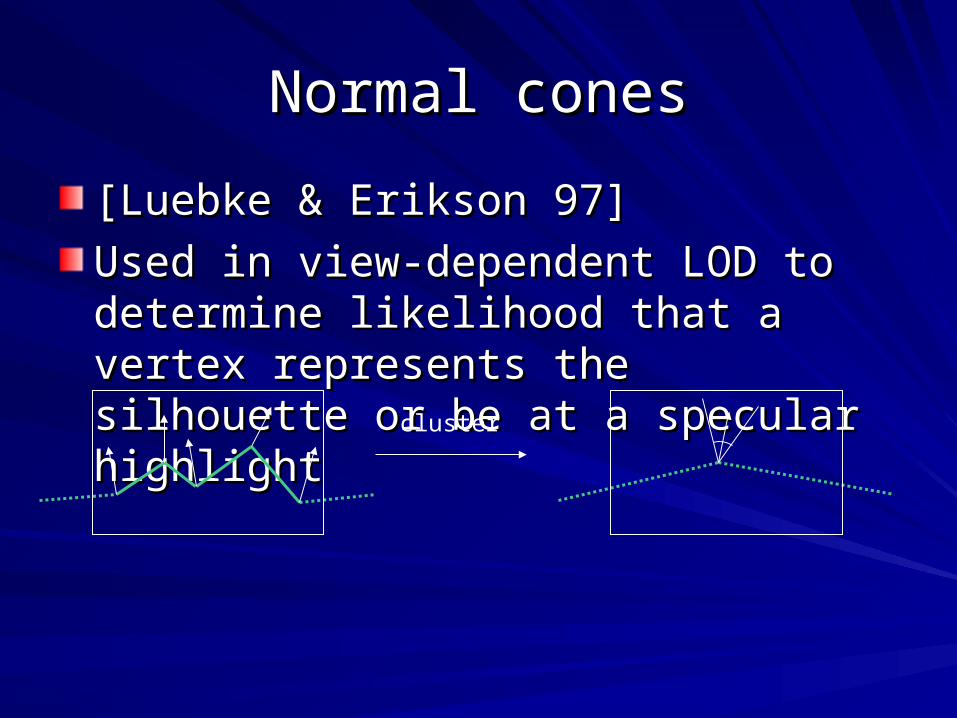
[Luebke & Erikson 97][Luebke & Erikson 97]
Used in view-dependent LOD to determine Used in view-dependent LOD to determine likelihood that a vertex represents the likelihood that a vertex represents the silhouette or be at a specular highlightsilhouette or be at a specular highlight
cluster
GAPSGAPS
[Erikson99][Erikson99]
Uses a threshold distance Uses a threshold distance ττ
Vertex pairs within distance Vertex pairs within distance ττ are are candidatescandidates
ττ grows over simplification process grows over simplification process
Allows topological simplification at all Allows topological simplification at all scalesscales
Image Driven SimplificationImage Driven Simplification
Render the object from a sampling of Render the object from a sampling of view-pointsview-points
Measure error as RMS of pixelsMeasure error as RMS of pixels
Only redraw relevant trianglesOnly redraw relevant triangles
Benefits?Benefits?
Drawbacks?Drawbacks?
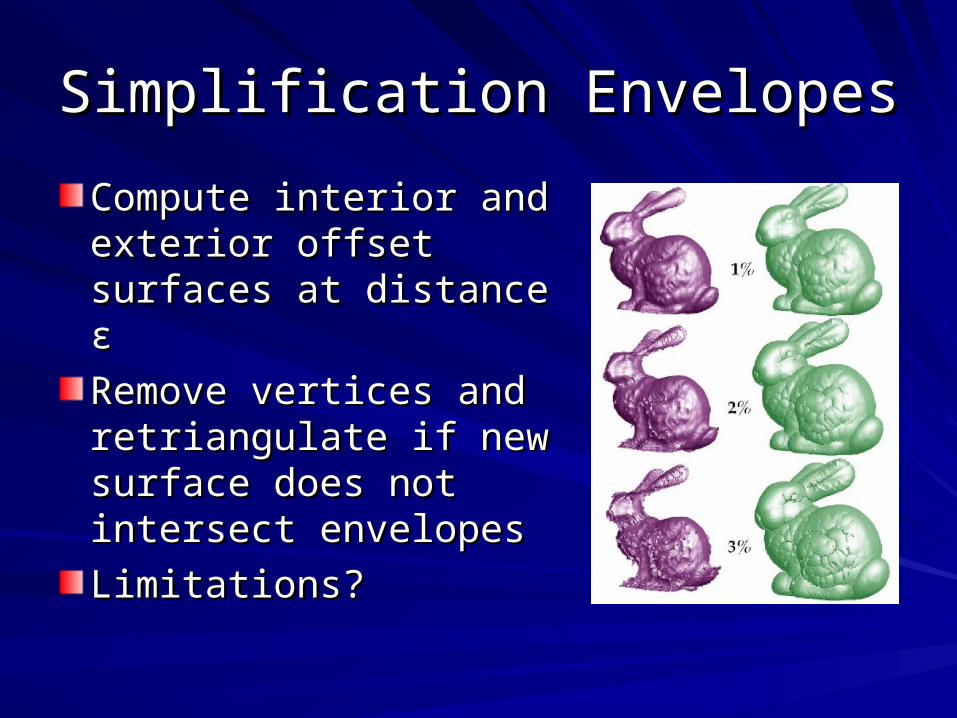
Simplification EnvelopesSimplification Envelopes
Compute interior and Compute interior and exterior offset surfaces exterior offset surfaces at distance at distance εε
Remove vertices and Remove vertices and retriangulate if new retriangulate if new surface does not surface does not intersect envelopesintersect envelopes
Limitations?Limitations?
Other Forms of LODOther Forms of LOD
Image impostorsImage impostors– Warping (e.g. [Rafferty98])Warping (e.g. [Rafferty98])– Texture Depth Meshes (e.g. [Aliaga99])Texture Depth Meshes (e.g. [Aliaga99])
Shader LODShader LOD– Number of shadersNumber of shaders– Number of texturesNumber of textures
Simulation LODSimulation LOD– Time stepsTime steps– Simulation resolutionSimulation resolution– Number of particlesNumber of particles
LightingLighting– Number and type of lights usedNumber and type of lights used
ResourcesResources
LOD Book: Luebke et al.LOD Book: Luebke et al.– www.lodbook.comwww.lodbook.com
Surveys:Surveys:– http://www.cs.cmu.edu/afs/cs/user/garland/www/http://www.cs.cmu.edu/afs/cs/user/garland/www/
multires/survey.htmlmultires/survey.html– http://www.cs.umd.edu/class/spring2005/cmsc828v/http://www.cs.umd.edu/class/spring2005/cmsc828v/
papers/surveyMINGLE.pdfpapers/surveyMINGLE.pdf– http://citeseer.ist.psu.edu/247479.htmlhttp://citeseer.ist.psu.edu/247479.html– http://www.cs.virginia.edu/~luebke/publications/pdf/http://www.cs.virginia.edu/~luebke/publications/pdf/
cg+a.2001.pdfcg+a.2001.pdf






![Exploring the links between Van Hiele Levels and 3 ...The Van Hiele levels have been descnied in detail several times’ (see [4], [7], [ll], or [18]). From the Van Hiele levels, some](https://img.pdfslide.net/doc/110x75/60277ddf03945e67632c9543/exploring-the-links-between-van-hiele-levels-and-3-the-van-hiele-levels-have.jpg)






![PROFINET12362]_PROFINET...PROFINET Marketing - Benefits Diagnostic overview In levels of detail Device Modul Channel Interrupts Current fault events Acknowledged I&M (Identification](https://img.pdfslide.net/doc/110x75/5e8d3247e818b6389e77aa39/12362profinet-profinet-marketing-benefits-diagnostic-overview-in-levels-of.jpg)

![An Automated Modeling Method For Multiple Detail Levels Of ...graphics.cs.aueb.gr/graphics/docs/papers/tree_paper.pdf · levels of detail. Another technique by Meyer et al. in [9]](https://img.pdfslide.net/doc/110x75/5f0e8b727e708231d43fc1d8/an-automated-modeling-method-for-multiple-detail-levels-of-levels-of-detail.jpg)













