Embed Size (px)
Citation preview

A
L
MQ1
D
a
ARA
KBLC
1
rpnaetpt
astbichneet
eeB
Q2
h1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
ARTICLE IN PRESSG ModelEUE 51311 1–10
Int. J. Electron. Commun. (AEÜ) xxx (2014) xxx–xxx
Contents lists available at ScienceDirect
International Journal of Electronics andCommunications (AEÜ)
j ourna l h om epage: www.elsev ier .com/ locate /aeue
inear programming applied to blind signal equalization
arcelo A.C. Fernandes ∗
epartment of Computer Engineering and Automation, Center of Technology, Federal University of Rio Grande do Norte – UFRN, Natal, Brazil
r t i c l e i n f o
rticle history:eceived 29 April 2014ccepted 20 October 2014
a b s t r a c t
The aim of this paper is to present a proposal for convex optimization, based on linear programming,for blind equalizers applied to digital communication systems. Different to solutions that have been pre-
eywords:lind equalizationinear programmingonvex function
sented in the literature using linear programming, the proposed model takes into consideration channelswith intersymbol interference and Gaussian additive noise. The work also provides a comparative evalu-ation of the performance of interior-point, active-set, and simplex methods applied to the optimizationprocess involving the blind equalizer. The results of simulations for different digital communicationsystems are presented using bit error rate performance curves.
© 2014 Published by Elsevier GmbH.
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
. Introduction
The signals in wireless communication systems can be cor-upted by a variety of factors, notably thermal noise and multi-pathhenomena that can cause frequency-selective fading. Thermaloise, which is modeled by random variables with a given prob-bility distribution, can be efficiently minimized using channelncoders that use redundancy symbols for reconstruction of theransmitted signal. However, it is important to note that multi-ath phenomena, caused by diverse reflections of the signal duringransmission, are not effectively treated by channel encoders [1,2].
Multi-path phenomena are the main agents responsible for theppearance of intersymbol interference (ISI), characterized by theuperposition of symbols from the same source in the domain ofime. In order to minimize the effects of ISI, a variety of devices cane used in the reception process, amongst which are linear equal-
zers. These equalizers are filters able to compensate the non-idealhannel response, in order to recover the transmitted signal. ISI isighly dynamic and changes according to the environment, so it isecessary to employ efficient adaptive algorithms in the equaliz-rs. In turn, the adaptive algorithms adjust the coefficients of thequalizers (the parameters to be optimized) in order to attenuatehe ISI [1–3].
Amongst the various classes of adaptive equalizers are the blind
Please cite this article in press as: Fernandes MAC. Linear programm(AEÜ) (2014), http://dx.doi.org/10.1016/j.aeue.2014.10.017
qualizers [4–6], which do not require the transmission of a ref-rence signal to the receiver in order to calculate the coefficients.lind equalizers minimize the problem of ISI using observation of
∗ Tel.: +55 8432153771.E-mail address: [email protected]
ttp://dx.doi.org/10.1016/j.aeue.2014.10.017434-8411/© 2014 Published by Elsevier GmbH.
66
67
68
69
the output signal of the communication channel, together with cer-tain a priori information concerning the statistical properties ofthe transmitted signal. The fact that no reference signal is usedincreases the data transmission capacity in systems employingblind equalization. A variety of techniques can be used for the adap-tation (or optimization) of the coefficients of the blind equalizer[4–7], and one of the most widely used is the gradient descent opti-mization method known as the constant modulus algorithm (CMA)[5,7]. Nonetheless, the optimization function of the CMA does notprovide full convergence, and presents undesirable local minimathat can lead to inefficient reduction of ISI [5,7].
In order to improve the performance of blind equalizers whenfaced with problems of local minima, the work presented in [8]proposed a globally convergent blind equalization technique basedon a convex cost function. Following the guidelines concerningthe convex cost function given in [8], the work presented in [9]described a linear programming (LP) methodology applied to blindequalizers, as an alternative to the CMA algorithm. Other workconcerning the utilization of linear programming associated withblind equalization is described in [10–12]. In the work presentedin [13–17] LP is used in an equalizer associated with the channelcoding process.
However, the earlier work [8–10] concerning the proposal forblind equalization based on linear programming was incompletein several ways. These include the lack of any analysis of the per-formance of the technique in channels with ISI and additive whiteGaussian noise (AWGN), no analysis of performance compared tothe CMA algorithm, and the absence of tests and simulations using
ing applied to blind signal equalization. Int J Electron Commun
other LP optimization algorithms. Given these considerations, thepresent paper contributes to the refinement of the technique pro-posed in [9], making new analyses and proposing a new constraintfunction and other LP optimization algorithms to be applied in a
70
71
72
73

ARTICLE IN PRESSG ModelAEUE 51311 1–10
2 M.A.C. Fernandes / Int. J. Electron. Commun. (AEÜ) xxx (2014) xxx–xxx
Symbol generator
Chann el h(k)
a(k) x(k)Equalizer+
u(k)
Ts
ã(k)
be
2
intolr
a
watiasd
ue
u
x
wgo
3
ia
a
u(k)
w(k)
ã(k-deq)Linear adaptive equalizer
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
r(k)
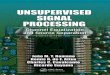
Fig. 1. Discrete baseband communication system with ISI and AWGN.
lind adaptive equalizer that is here called the BLE-LP (blind linearqualizer based on linear programming).
. Characterization of the communication channel
Fig. 1 presents a simplified structure of a discrete baseband dig-tal communication system with ISI (represented by h(k)), thermaloise (represented by r(k)), and a source of information, transmit-ing complex symbols, a(k), belonging to a set, A = {a0, . . ., aM−1},f M possible symbols. The symbols are transmitted with a samp-ing period of Ts seconds (symbol interval), and each symbol isepresented by words of b bits.
The complex symbols, a(k), are expressed by
(k) = aI(k) + jaQ (k), (1)
here aI(k) and aQ(k) are the unidimensional phase componentsnd quadrature, respectively, that constitute the bidimensionalransmitted signal. The symbols a(k) are transmitted by means of anmpulse response channel, h(k), and are subject to the action of ISInd complex AWGN, r(k) = rI(k) + jrQ(k), as illustrated in Fig. 1. Theignals rI(k) and rQ(k) are random circular variables with a Gaussianistribution, with an zero mean and variance �2
r [2].As shown in Fig. 1, the linear equalizer processes the signal,
(k), resulting from the sum of the channel output and the AWGN,xpressed as
(k) = x(k) + r(k), (2)
(k) = �0(k)a(k − �0(k)) +L−1∑i=1
�i(k)a(k − �i(k)), (3)
here L is the number of paths of the channel, �i is the complexain of the ith path, and �i(k) is an integer representing the delayf the ith path at instant k.
. Blind adaptive equalization
The objective of a linear equalizer is to reduce the ISI componentn the received signal, u(k) [2,3]. Its structure is illustrated in Fig. 2,nd the output signal can be expressed by
˜(k − deq) =N−1∑l=0
wl(k)u (k − l)
Please cite this article in press as: Fernandes MAC. Linear programm(AEÜ) (2014), http://dx.doi.org/10.1016/j.aeue.2014.10.017
=N−1∑l=0
wl(k)x (k − l) +N−1∑l=0
wl(k)r (k − l) , (4)
w0(k)
z-1
+
X Xw1(k)
+ +
z-1
XwN-2(k)
+
XwN-1(k)
u(k) u(k-1) u(k-N-1)
...
... u(k-N-2)
ã(k-deq)
Fig. 2. Structure of a linear equalizer of length N.
139
140
141
142
143
144
145
146
147
Blind algo rithm
Fig. 3. Structure of a blind linear adaptive equalizer.
where wl is the lth complex gain of the equalizer, and deq is theequalization delay.
The linear adaptive equalizer (Fig. 3) is a linear digital filter (asshown in Fig. 2), which operates in conjunction with an algorithmin order to adapt its parameters, w(k), according to the randomvariation of the impulse response of the communication channel.The adaptation proceeds by optimizing a cost function, J(w(k)), inwhich
w (k) =
⎡⎢⎢⎣
w0 (k)
...
wN−1 (k)
⎤⎥⎥⎦ =
⎡⎢⎢⎣
wI0 (k)
...
wIN−1 (k)
⎤⎥⎥⎦ + j
⎡⎢⎢⎣
wQ0 (k)
...
wQN−1 (k)
⎤⎥⎥⎦
= wI (k) + jwQ (k) , (5)
where wI (k) and wQ (k) are real and imaginary parameters of theequalizer, respectively.
There are two families of adaptive equalizers, either supervisedor blind, which differ in the way that the adaptation algorithmoperates [3]. The blind equalization algorithms do not require atraining sequence, and use statistical metrics of the transmitted sig-nal itself in order to adjust the parameters [4–7]. One of the mostwell-known blind equalization algorithms is the constant modulusalgorithm (CMA) [5,7].
The CMA attempts to adjust a power integer, p, of the infor-mation leaving the adaptive filter to a real positive constant, rp.This constant is selected in order to project onto a circle all thepoints of the output constellation of the adaptive filter [5,7]. Thecost function to be optimized, JCMA, is expressed by
JCMA(w(k)) = E[e(k)2], (6)
where E[·] is the mean operator, and
e (k) = � − |a(k)|2, (7)
in which � is the dispersion constant given by
� =E{∣∣ak
∣∣4}
E{∣∣ak
∣∣2}
,(8)
where ak belongs to the set A of possible modulation symbolsemployed. The cost function, JCMA, is optimized by the gradi-ent descent method with the classical stochastic approximation(substituting the mathematical expectation for an instantaneousestimate) [3]. Nevertheless, as shown previously [18,19,5,7], theGodard criterion, used in the CMA algorithm, possesses points oflocal minima that can hinder the equalization process.
4. Blind linear equalizer based on linear programming
4.1. Linear programming
ing applied to blind signal equalization. Int J Electron Commun
There are several algorithms that can be applied to linear pro-gramming problems. These include the interior-point, active-set,and simplex methods, which have a wide range of applications.
148
149
150

ING ModelA
. Com
ffetc
prtlplo
mdsplmdbgcr[
4
b
J
m
M
M
f
m
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
ARTICLEEUE 51311 1–10
M.A.C. Fernandes / Int. J. Electron
The simplex method searches for an optimal solution by movingrom one basic feasible solution to another, along the edges of theeasible set, always in a cost reducing direction. There are differ-nt implementations of the simplex method, including the simplexableau and the revised simplex method. The total computationalost per iteration (of the revised simplex method) is O(mn) [20].
The active-set method is a variant of the sequential quadraticrogramming method (SQP), in which the quadratic term iseduced to zero. SQP is one of the most successful methods forhe numerical solution of constrained nonlinear optimization prob-ems. It is based on a profound theoretical foundation and providesowerful algorithmic tools for the solution of large-scale techno-
ogically relevant problems. The computational cost per iterationf the active-set method is O(n2) [21,22].
An interior point method is a linear or nonlinear programmingethod that achieves optimization by going through the mid-
le of the solid defined by the problem, rather than around itsurface. Interior point methods for linear and (convex) quadraticrogramming display several features that make them particu-
arly attractive for very large scale optimization. Interior pointethods are competitive when dealing with small problems of
imensions below one million constraints and variables, and areeyond competition when applied to large problems of dimensionsoing into millions of constraints and variables. The computationalost per iteration (in most implementations) is O(n). However, cur-ently there are implementations with computational cost of O(
√n)
23–25]
.2. Cost function
According to earlier work [8,9], the convex cost function for thelind linear equalizer can be expressed by
LP(w) = JLP(wI , wQ ) ≡ max |aI(k)| + max |aQ (k)|. (9)
Expanding the term aI(k) using Eq. (4) gives
ax |aI(k)| = max
∣∣∣∣∣N−1∑l=0
L−1∑i=1
�Ii (k − l)aI (k − �i(k) − l) wI
l (k)
∣∣∣∣∣
+ max
∣∣∣∣∣N−1∑l=0
L−1∑i=0
− �Qi
(k − l)aQ (k − �i(k) − l) wIl (k)
∣∣∣∣∣
+ max
∣∣∣∣∣N−1∑l=0
L−1∑i=1
− �Ii (k − l)aI (k − �i(k) − l) wQ
l(k)
∣∣∣∣∣
+ max
∣∣∣∣∣N−1∑l=0
L−1∑i=0
�Qi
(k − l)aQ (k − �i(k) − l) wQl
(k)
∣∣∣∣∣
+ max
∣∣∣∣∣N−1∑l=0
rI(k − l)wIl (k)
∣∣∣∣∣
+ max
∣∣∣∣∣N−1∑l=0
− rQ (k − l)wQl
(k)
∣∣∣∣∣ . (10)
Assuming that the transmitted signal, a(k), is modulated in the-QAM scheme, then
I Q
Please cite this article in press as: Fernandes MAC. Linear programm(AEÜ) (2014), http://dx.doi.org/10.1016/j.aeue.2014.10.017
≡ max |a (k)| = max |a (k)|, (11)
or any k and
ax |rI(l − k)| = max |rQ (l − k)| = �r, (12)
PRESSmun. (AEÜ) xxx (2014) xxx–xxx 3
for any l and k, where �r is the radius associated with the circularAWGN, r(k). Eq. (10) can then be simplified and expressed by
max∣∣aI(k)
∣∣ = M
N−1∑l=0
L−1∑i=0
(∣∣�Ii (k − l)wI
l (k)∣∣ +
∣∣�Qi
(k − l)wIl (k)
∣∣
+∣∣�I
i (k − l)wQl
(k)∣∣ +
∣∣�Qi
(k − l)wQl
(k)∣∣)
+ �r
N−1∑l=0
∣∣wIl (k)
∣∣ +∣∣wQ
l(k)
∣∣ . (13)
Similar to Eqs. (10) and (13), the term aQ (k) can be expressed by
max∣∣aQ (k)
∣∣ = M
N−1∑l=0
L−1∑i=0
(∣∣�Ii (k − l)wI
l (k)∣∣ +
∣∣�Qi
(k − l)wIl (k)
∣∣
+∣∣�I
i (k − l)wQl
(k)∣∣ +
∣∣�Qi
(k − l)wQl
(k)∣∣)
+ �r
N−1∑l=0
∣∣wIl (k)
∣∣ +∣∣wQ
l(k)
∣∣ . (14)
The functions �Ii(k − l)wI
l(k), �I
i(k − l)wQ
l(k), �Q
i(k − l)wI
l(k), and
�Qi
(k − l)wQl
(k) are linear in wI and wQ, and their moduli |�Ii(k −
l)wIl(k)|, |�I
i(k − l)wQ
l(k)|, |�Q
i(k − l)wI
l(k)|, and |�Q
i(k − l)wQ
l(k)| are
convex functions in wI and wQ. Hence, since JLP
(wI , wQ
)is a sum of
these functions, it can be said that JLP
(wI , wQ
)is also convex. With-
out any constraint, JLP
(wI , wQ
)possesses a trivial global minimum
in wI = wQ = 0, generating a(k) = 0 as output. In order to ensure thatJLP
(wI , wQ
)is practicable, the following constraint is proposed:
wIdeq
(k) = 1, (15)
where deq is an integer limited by 0 ≤ deq ≤ N − 1 that represents theequalization delay. This constraint is based on the initial conditionof the CMA algorithm presented earlier [5,7–9], and serves to avoidthe solution with null outputs, while at the same time ensuringequalization of the channel. Due to the linearity of the constraint,the convex nature of the cost function is maintained, together withthe global convergence of the function.
Comparison of Eqs. (13) and (14) with those presented earlier[8–10], it can be seen that the AWGN does not alter the convexnature of the cost function, but only alters the value of the globalminimum that is proportional to the value of �r.
4.3. Optimizing equalizers with linear programming
Based on Eqs. (9), (13), and (14), the gains of the equalizer areadjusted according to the following linear programming strategy.The system of equations
min
⎧⎪⎪⎨⎪⎪⎩
max |aI(k − deq)| + max |aQ (k − deq)|...
max |aI(k − K + 1 − deq)| + max |aQ (k − K + 1 − deq)|
(16)
is minimized subject to the constraint
wI (k) = 1. (17)
ing applied to blind signal equalization. Int J Electron Commun
deq
Substituting the values of aI(k − deq) and aQ (k − deq) for Eq. (4),and using the same strategy presented earlier [8–10], introducingtwo auxiliary variables, �1 and �2, the linear programming strategy
234
235
236

ARTICLE ING ModelAEUE 51311 1–10
4 M.A.C. Fernandes / Int. J. Electron. Com
u(k)
Blind algorithm based on LP
w(kK)
ã(k-deq)Linear adaptive equalizer
UI(k)
Buffer UQ(k)
pe
M
s
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
a
w
MppS(m
The parameters employed in the structures of the simulated
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
Fig. 4. Structure of a blind linear adaptive equalizer based on LP.
resented in Eqs. (16) and (17) can be expressed minimizing thequation
�1 + M�2 (18)
ubject to the following constraints:
N−1∑l=0
wIl (k)uI (k − l) − wQ
l(k)uQ (k − l) ≤ M�1
...N−1∑l=0
wIl (k)uI (k − l − K + 1) − wQ
l(k)uQ (k − l − K + 1) ≤ M�1,
(19)
N−1∑l=0
wIl (k)uI (k − l) − wQ
l(k)uQ (k − l) ≥ − M�1
...N−1∑l=0
wIl (k)uI (k − l − K + 1) − wQ
l(k)uQ (k − l − K + 1) ≥ − M�1,
(20)
N−1∑l=0
wQl
(k)uI (k − l) − wIl (k)uQ (k − l) ≤ M�2
...N−1∑l=0
wQl
(k)uI (k − l − K + 1) − wIl (k)uQ (k − l − K + 1) ≤ M�2,
(21)
N−1∑l=0
wQl
(k)uI (k − l) − wIl (k)uQ (k − l) ≥ − M�2
...N−1∑l=0
wQl
(k)uI (k − l − K + 1) − wIl (k)uQ (k − l − K + 1) ≥ − M�2,
(22)
nd
Ideq
(k) = 1. (23)
Under the optimum condition, M�1 = max |aI(k − deq)| and�2 = max |aQ (k − deq)|. The linear programming strategy is com-
osed of n = 2N + 2 variables with m = 4K + 1 linear constraints. Inractice, the variable N is associated with the equalizer length (see
Please cite this article in press as: Fernandes MAC. Linear programm(AEÜ) (2014), http://dx.doi.org/10.1016/j.aeue.2014.10.017
ection 3) and must be greater than the length of the channel LN > L). The variable K represents the number of times the signal
ust be stored in order to construct the optimization curve.
PRESSmun. (AEÜ) xxx (2014) xxx–xxx
4.4. Architecture of the BLE-LP
The BLE-LP (with the structure presented in Fig. 4) operates inblocks, with a buffer, K, storing the vectors, u (k), and constructingthe matrices
UI (k) =[uI (k) · · · uI (k − K + 1)
], (24)
UQ (k) =[uQ (k) · · · uQ (k − K + 1)
]. (25)
and
u (k) = [u (k) · · · u (k − l) · · · u (k − N + 1)]T . (26)
In contrast to the CMA, which updates the parameters every instantk, the BLE-LP updates the parameters for each block K of symbols.For static channels, this does not present any difficulty, but formobile channels the value of K must be smaller than the coherencetime of the channel [1,2].
5. Results
In order to validate the BLE-LP and determine its reliability andperformance, simulations were performed for the 4-QAM, 16-QAM,64-QAM and 256-QAM digital communication systems, withoutchannel encoding. The system was modeled and simulated accord-ing to the scheme shown in Fig. 1, and the results were evaluatedusing the interior-point, active-set, and simplex methods. In addi-tion to the LP techniques, evaluation was also made of the resultsobtained using the CMA algorithm, in order to compare the perfor-mance of the new technique with that of one of the most widelyused blind equalization methods.
The simulations were used to generate bit error rate (BER) curvesas a function of Eb/N0, where Eb/N0 represents the relation betweenthe bit energy,
Eb = E[a2k]
log2(M), (27)
and the power spectral density of the noise, N0 = �2r . The results
were evaluated for three scenarios of channels with ISI and AWGN,with the first channel (channel A) being expressed by
hA(k) = ı(k) + 0.5ı(k − 3) + 0.3ı(k − 6), (28)
the second (channel B) being expressed by
hB(k) = ı(k) + 0.6ı(k − 1) + 0.4ı(k − 2) (29)
and the third (channel C) being expressed by
hC (k) = ˛0(k)ı(k) + ˛1(k)ı(k − 1) + ˛2(k)ı(k − 2). (30)
Channel C is a time variant channel (Rician fading) with a coher-ence time of 400 symbols. The channel coefficients (˛0(k), ˛1(k) and˛2(k)) are shown in Fig. 5.
In simulations with static channels (channel A and channel B),the parameters of the equalizers (BNL and CMA) were adjusted fora fixed time, called the adjustment time.
In the simulations with static channels (channel A and chan-nel B), the equalizer parameters were adjusted in a period of Tadsymbols and the error count (BER values) was started after Tad sym-bols. The parameters of the equalizers were not adjusted during theerror count (after Tad symbols). For the mobile channel (channel C),the equalizer parameters were updated throughout the simulationtime. In all simulations, the BER values were computed after 1 × 107
symbols.
ing applied to blind signal equalization. Int J Electron Commun
equalizers are presented in Table 1. It should be emphasizedthat these parameters were selected after exhaustive simulationssearching for the best values for each equalizer structure.
305
306
307

ARTICLE IN PRESSG ModelAEUE 51311 1–10
M.A.C. Fernandes / Int. J. Electron. Commun. (AEÜ) xxx (2014) xxx–xxx 5
Fig. 5. Profile of the channel C coefficients (˛0(k), ˛1(k) and ˛2(k)) along 2 × 105 symbols.
Table 1Parameters employed in the structures of the simulated equalizers.
Channel
A (hA(k)) and B (hB(k)) C (hC(k))
QAM modulation (M) 4 16 64 256 4Equalizer length (N) 33 33 33 33 33
6 6 61000 1400 40010−4 5 × 10−5 10−3
Q6gmQwsw(a(tbsT
sa
Fh
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
Equalization delay (deq) 6 6
BLE-LP block length (K) 400 400
CMA adaptation step (�) 10−3 10−3
The results obtained for the 4-QAM, 16-QAM, 64-QAM and 256-AM systems in the case of channel A, hA(k), are presented in Figs., 7, 8 and 9, respectively. The 4-QAM system (Fig. 6) showed aain of approximately 2 dB, comparing the linear programmingethod with the traditional CMA method. In the case of the 16-AM, 64-QAM, and 256-QAM systems (Figs. 7–9), the CMA methodas unable to achieve convergence to a global minimum for Tad = K
ymbols, in contrast to the linear programming technique. In otherords, the CMA was unable to equalize channel A in Tad = K symbols
16-QAM used K = 400 symbols, 64-QAM used K = 1000 symbols,nd 256-QAM used K = 1400 symbols). However, it can be observedcurves shown in Figs. 6–9) that the CMA has a similar performanceo the BLE-LP when its parameters are adjusted with Tad > K sym-ols (4-QAM used Tad = 1 ×103 symbols, 16-QAM used Tad = 1 ×104
ymbols, 64-QAM used Tad = 7 ×104 symbols, and 256-QAM used5
Please cite this article in press as: Fernandes MAC. Linear programming applied to blind signal equalization. Int J Electron Commun(AEÜ) (2014), http://dx.doi.org/10.1016/j.aeue.2014.10.017
ad = 2 ×10 symbols).The Eb/N0 curves for the simulations employing the second
cenario with channel B, hB(k), are presented in Figs. 10, 11 12nd 13 for the 4-QAM, 16-QAM, 64-QAM, and 256-QAM systems,
ig. 6. 4-QAM system BER performance curve as a function of Eb/N0 for channel A,A(k) (see Eq. (28)).
Fig. 7. 16-QAM system BER performance curve as a function of Eb/N0 for channel A,hA(k) (see Eq. (28)).
Fig. 8. 64-QAM system BER performance curve as a function of Eb/N0 for channel A,hA(k) (see Eq. (28)).

ARTICLE IN PRESSG ModelAEUE 51311 1–10
6 M.A.C. Fernandes / Int. J. Electron. Commun. (AEÜ) xxx (2014) xxx–xxx
Fig. 9. 256-QAM system BER performance curve as a function of Eb/N0 for channelA, hA(k) (see Eq. (28)).
Fh
rap6lcm
FB
Fig. 12. 64-QAM system BER performance curve as a function of Eb/N0 for channelB, hB(k) (see Eq. (29)).
327
328
329
330
331
332
333
334
335
336
337
ig. 10. 4-QAM system BER performance curve as a function of Eb/N0 for channel B,B(k) (see Eq. (29)).
espectively. The 4-QAM system showed a performance gain ofpproximately 6 dB for the linear programming technique, com-ared to the CMA method (Fig. 10). In the cases of the 16-QAM,4-QAM and 256-QAM systems (Figs. 11–13), the results were simi-
Please cite this article in press as: Fernandes MAC. Linear programm(AEÜ) (2014), http://dx.doi.org/10.1016/j.aeue.2014.10.017
ar to those obtained for channel A, with the CMA method providingonvergence to a local minimum, while the linear programmingethod provided global convergence. The CMA had a similar per-
ig. 11. 16-QAM system BER performance curve as a function of Eb/N0 for channel, hB(k) (see Eq. (29)).
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
Fig. 13. 256-QAM system BER performance curve as a function of Eb/N0 for channelB, hB(k) (see Eq. (29)).
formance to the BLE-LP when its parameters were adjusted withTad > K symbols (4-QAM used Tad = 700 symbols, 16-QAM usedTad = 1 ×104 symbols, 64-QAM used Tad = 1 ×105 symbols, and 256-QAM used Tad = 2 ×105 symbols).
Analysis of the constellation at the output of the equalizers pro-vides an indication of the substantial difference in performancebetween the CMA equalizer and the BLE-LP equalizer (with interior-point, active-set, and simplex methods), using a signal-to-noiseratio of 30 dB and Tad = K. While BLE-LP could provide a visuallyrecognizable constellation (Figs. 14 and 15), the CMA equalizer con-stellations were totally dispersed and unrecognizable (Figs. 16 and17).
The Eb/N0 curves for the simulations employing the third sce-nario with channel C, hC(k), are presented in Fig. 18 for the 4-QAMsystems. The 4-QAM system showed a performance gain of approxi-mately 5-fold (considering BER = 22 dB) for the linear programmingtechnique, compared to the CMA method.
In all scenarios (including for M > 4), the CMA converged (therewas no failure in convergence). However, it required a greater num-ber of iterations. For example, in Fig. 9 (256-QAM channel A), theCMA converged after 200,000 symbols, different to the other meth-ods. It is important to note that in no method is the reference pointguided (training sequence), and that they therefore have essentially
ing applied to blind signal equalization. Int J Electron Commun
the same limitation. While the CMA attempts to adjust the constel-lation of signals to a radius � (see Eq. (8)), the BLE-LP tries to adjustthe constellation within a square whose dimensions are limitedby ±M�1 and ±M�2. In other words, the challenges are of the same
357
358
359
360

Please cite this article in press as: Fernandes MAC. Linear programming applied to blind signal equalization. Int J Electron Commun(AEÜ) (2014), http://dx.doi.org/10.1016/j.aeue.2014.10.017
ARTICLE IN PRESSG ModelAEUE 51311 1–10
M.A.C. Fernandes / Int. J. Electron. Commun. (AEÜ) xxx (2014) xxx–xxx 7
Fig. 14. Received signal constellations for the 4-QAM system, using channel A, hA(k) (see Eq. (28)), with Eb/N0 = 30 dB.
Fig. 15. Received signal constellations for the 16-QAM system, using channel A, hA(k) (see Eq. (28)), with Eb/N0 = 30 dB.

Please cite this article in press as: Fernandes MAC. Linear programming applied to blind signal equalization. Int J Electron Commun(AEÜ) (2014), http://dx.doi.org/10.1016/j.aeue.2014.10.017
ARTICLE IN PRESSG ModelAEUE 51311 1–10
8 M.A.C. Fernandes / Int. J. Electron. Commun. (AEÜ) xxx (2014) xxx–xxx
Fig. 16. Received signal constellations for the 4-QAM system, using channel B, hB(k) (see Eq. (28)), with Eb/N0 = 30 dB.
Fig. 17. Received signal constellations for the 16-QAM system, using channel B, hB(k) (see Eq (28)), with Eb/N0 = 30 dB.

ARTICLE ING ModelAEUE 51311 1–10
M.A.C. Fernandes / Int. J. Electron. Com
Fh
ma(ds
w(bec14mo
TM
TN
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
ig. 18. 4-QAM system BER performance curve as a function of Eb/N0 for channel C,C(k) (see Eq. (30)).
agnitude for both methods. Hence, comparison between the CMAnd the BLE-LP is justified. As the cost function of the CMA (see Eq.6)) possesses many local minima, the convergence efficiency of theescending gradient method is highly dependent on the adaptationtep. This problem does not occur in the case of the BLE-LP.
For channels A and B with 4-QAM modulation, and channel Bith 16-QAM modulation, the results shown in the BER curves
see Figs. 6, 10, and 11) did not indicate any significant differencesetween the interior-point, active-set, and simplex methods. How-ver, in the case of channel A with 16-QAM modulation, and for bothhannels with 64-QAM and 256-QAM modulations (see Figs. 7–9,
Please cite this article in press as: Fernandes MAC. Linear programm(AEÜ) (2014), http://dx.doi.org/10.1016/j.aeue.2014.10.017
2, and 13), differences were observed that varied between 2 and dB, depending on the channel (A or B) and the level (M) of theodulation. In these cases, the active-set and interior-point meth-
ds provided better results, compared to the simplex method, and
able 2ean number of iterations, Eit , and its standard deviation, �, between points of Eb/N0 for
Simulation scenario Interior-point
Eit �
Channel A4-QAM 14.6 1.4
16-QAM 18.6 3.9
64-QAM 57.1 5.4
256-QAM 59.7 6.1
Channel B4-QAM 15.6 2.9
16-QAM 16.6 2.3
64-QAM 52.5 4.4
256-QAM 53.3 5.3
Channel C4-QAM 15.0 2.5
able 3umber of operations (in Tad symbols) associated with each method for each simulation
Simulation scenario Interior-point
NopIP
Channel A4-QAM 9.9 × 102
16-QAM 1.3 × 103
64-QAM 3.9 × 103
256-QAM 4.1 × 103
Channel B4-QAM 1.0 × 103
16-QAM 1.2 × 103
64-QAM 3.6 × 103
256-QAM 3.6 × 103
PRESSmun. (AEÜ) xxx (2014) xxx–xxx 9
in some cases, the active-set method was superior to the interior-point method (channel A with 16-QAM and 64-QAM).
For both channels with 64-QAM and 256-QAM modulations, thesimplex method did not provide performance equivalent to theother methods (interior-point and active-set), with differences ofapproximately 2.5 dB in the case of 64-QAM and 4 dB with 256-QAM. This can be explained by the fact that the simplex methodis more suitable for small problems (with a limited number ofrestrictions and variables), while the active-set and interior-pointmethods are more suitable for larger-scale optimization problems(see Section 4.1). In the case of the 64-QAM and 256-QAM modu-lations, blocks of K = 1000 and K = 1400 symbols were used, whichconsiderably increased (more than doubled) the number of restric-tions, relative to the results obtained using the 4-QAM and 16-QAMmodulations.
Table 2 presents the mean number of iterations, Eit, and itsstandard deviation, �, between points of Eb/N0 for each methodand each simulated scenario. It can be seen that the interior-pointmethod provided faster convergence (around 10 times), comparedto the active-set and simplex methods. The standard deviation val-ues indicated that the AWGN had little effect on the number ofiterations for each scenario (with a maximum standard deviationof around 25% of the mean for various values of Eb/N0). There wasalso little variation in the mean number of iterations, comparingthe two simulation scenarios for a specific method.
The computational cost (interior-point, active-set, simplex, andCMA methods) can be calculated using the number of iterationsperformed in Tad symbols. The calculation of the operations number(in Tad symbols) for the CMA, Nop
CMA, can be expressed by
ing applied to blind signal equalization. Int J Electron Commun
NopCMA = 2NTad, (31)
each method and each simulated scenario.
Active-set Simplex
Eit � Eit �
232.8 39.0 188.4 13.1183.6 14.7 183.8 38.9208.5 34.3 213.0 53.5222.2 51.4 242.4 49.4
207.0 43.7 211.6 58.1207.2 37.0 229.0 44.8209.4 29.8 230.7 32.7235.5 52.5 229.0 47.8
220.7 36.2 209.2 46.2
scenario.
Active-set Simplex CMANop
ASNop
SNop
CMA
1.1 × 106 2.1 × 107 6.6 × 104
8.5 × 105 2.0 × 107 6.6 × 105
9.9 × 105 5.8 × 107 4.62 × 106
1.0 × 106 9.2 × 107 1.32 × 107
9.6 × 105 2.3 × 107 4.62 × 104
9.6 × 105 2.5 × 107 6.6 × 105
9.7 × 105 6.3 × 107 6.6 × 106
1.0 × 106 7.8 × 107 6.6 × 107
405

ING ModelA
1 . Com
wtc
N
wit(n
N
Fp
N
w
osa
6
oeenowmicsn
R
[
[
[
[
[
[
[
[
[
[
[
[
[
[binatorica 1984;4(4):373–95. ( )
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
441
442
443
444
445
446
447
448
449
450
451
452
453
454
455
456
457
458
459
460
461
462
463
464
465
466
467
468
469
470
471
472
473
474
475
476
477
478
479
480
481
482
483
484
485
486
487
488
ARTICLEEUE 51311 1–10
0 M.A.C. Fernandes / Int. J. Electron
here 2N is the number of complex coefficients of the equalizer. Forhe interior-point method, the operations number (in Tad symbols)an be calculated asopIP = nEit = (2N + 2)Eit, (32)
here n is the variables number and Eit is the mean number ofterations. It is important to observe that the computational cost ofhe IP method is O(n) [23–25]. In the case of the active-set methodcomputational cost on the order of O(n2) [21,22]), the operationsumber (in Tad symbols) can be expressed byopAS = n2Eit = (2N + 2)2Eit . (33)
inally, the operations associated with the simplex method (com-utational cost on the order of O(mn) [20]) can be expressed byopS = mnEit = (4K + 1)(2N + 2)Eit = (4Tad + 1)(2N + 2)Eit (34)
here m is the number of constraints and K = Tad.Table 3 shows the the number of operations performed (based
n Eqs. (31)–(34), and Table 2) by the methods in all simulationcenarios. For a fair comparison, the Tad values when the CMA had
similar performance to the BLE-LP were used.
. Conclusions
This work provides an analysis and refinement of a convexptimization technique, based on linear programming, for blindqualizers applied to digital communication systems. Different toarlier proposals, a model was constructed that considered chan-els with AWGN and ISI. Also presented is a comparative analysisf different optimization techniques for linear programming, whichere applied in the proposed model. The new structure was sub-itted to simulations and compared to the conventional system
n order to determine its performance in different transmissionhannel models. The results obtained indicate a significant advance,uggesting that the new scheme could be employed in real commu-ication systems.
Please cite this article in press as: Fernandes MAC. Linear programm(AEÜ) (2014), http://dx.doi.org/10.1016/j.aeue.2014.10.017
eferences
[1] Haykin S. Communication systems. 4th Ed. John Wiley & Sons; 2001.[2] Proakis J. Digital communications. McGraw-Hill Science/Engineering/Math;
2000.
[
[
PRESSmun. (AEÜ) xxx (2014) xxx–xxx
[3] Simon Haykin. Adaptive filter theory. 4th Ed. Prentice Hall; 2001.[4] Sato Y. A method of self-recovering equalization for multilevel amplitude-
modulation systems. IEEE Trans Commun 1975;23(6):679–82.[5] Godard D. Self-recovering equalization and carrier tracking in two-dimensional
data communication systems. IEEE Trans Commun 1980;28(11):1867–75.[6] Shalvi O, Weinstein E. New criteria for blind deconvolution of nonminimum
phase systems (channels). IEEE Trans Inform Theory 1990;36(2):312–21.[7] Benveniste A, Goursat M. Blind equalizers. IEEE Trans Commun
1984;32(8):871–83.[8] Kennedy RA, Ding Z. Blind adaptive equalizers for quadrature amplitude
modulated communication systems based on convex cost functions. Opt Eng1992;31(6):1189–99.
[9] Ding Z, Luo Z-Q. A fast linear programming algorithm for blind equalization.IEEE Trans Commun 2000;48(9):1432–6.
10] Luo Z-Q, Meng M, Wong KM, Zhang J-K. A fractionally spaced blind equal-izer based on linear programming. IEEE Trans Signal Process 2002;50(7):1650–60.
11] Muhammad M, Ding Z. A linear programming receiver for blind detectionof full rate space-time block codes. IEEE Trans Signal Process 2010;58(11):5819–34.
12] Jacklin N, Ding Z, Li Y. On efficient use of pilot symbols for multi-path channelequalization of qam signals. In: IEEE international conference on communica-tions (ICC),. 2013. p. 5553–8.
13] Taghavi M, Siegel P. Equalization on graphs: inear programming and messagepassing. In: ISIT 2007. IEEE international symposium on information theory.2007. p. 2551–5.
14] Wadayama T. Interior point decoding for linear vector channels based on con-vex optimization. IEEE Trans Inform Theory 2010;56(10):4905–21.
15] Vontobel P. Interior-point algorithms for linear-programming decoding. In:Information theory and applications workshop, 2008. 2008. p. 433–7.
16] Taghavi M, Siegel P. Graph-based decoding in the presence of ISI. IEEE TransInform Theory 2011;57(4):2188–202.
17] Daly EL. Soft-input soft-output linear programming decoding. In: 2013 IEEEinternational conference on acoustics, speech and signal processing (ICASSP).2013. p. 5141–5.
18] Neves AdO, Attux RRdF, Suyama R, Miranda MD, Romano JaMT. Sobre critériospara equalizac ão não-supervisionada. Sba: Controle & Automac ão SociedadeBrasileira de Automatica 2006;17:278–99.
19] Treichler JR. Practical blind demodulators for high-order QAM signals. SignalProcess 1998;67(3):331–44.
20] Bertsimas D, Tsitsiklis J. Introduction to linear optimization. 1st Ed. AthenaScientific; 1997.
21] Santin O, Havlena V. Combined partial conjugate gradient and gradient pro-jection solver for mpc. In: 2011 IEEE international conference on Controlapplications (CCA). 2011. p. 1270–5.
22] MATLAB, Matlab Optimization Toolbox User’s Guide - R2012b, The MathWorksInc., Natick, Massachusetts, 2012.
23] Karmarkar N. A new polynomial-time algorithm for linear programming. Com-
ing applied to blind signal equalization. Int J Electron Commun
24] Ye Y, Anstreicher K. On quadratic and O√
nL convergence of a predic-
tor–corrector algorithm for lcp. Math Program 1993;62(3):537–51.25] Anstreicher KM. Linear programming in O([N3/ln(N)]L) operations. SIAM J
Optim 1999;9(4):803–12.
489
490
491
492