Embed Size (px)
Citation preview

energies
Article
Hierarchical Distributed Motion Control for MultipleLinear Switched Reluctance Machines
Bo Zhang 1,2, Jianping Yuan 2, Jianjun Luo 2, Xiaoyu Wu 1, Li Qiu 1 and J.F. Pan 1,*1 College of Mechatronics and Control Engineering, Shenzhen University, Shenzhen 518060, China;
[email protected] (B.Z.); [email protected] (X.W.); [email protected] (L.Q.)2 Laboratory of Advanced Unmanned Systems Technology, Research Institute of Northwestern Polytechnical
University in Shenzhen, Shenzhen 518060, China; [email protected] (J.Y.); [email protected] (J.L.)* Correspondence: [email protected]; Tel.: +86-755-2653-5382
Received: 14 June 2017; Accepted: 25 August 2017; Published: 16 September 2017
Abstract: This paper investigates a distributed, coordinated motion control network based onmultiple direct-drive, linear switched reluctance machines (LSRMs). A hierarchical, two-levelsynchronization control strategy is proposed for the four LSRMs based motion control network.The high-level, reference signals agreement algorithm is first employed to correct the asynchronousbehaviors of the position commands. Then, the low-level tracking synchronization method is appliedfor the collaborative position control of the four LSRMs. The proposed two-level, fault-tolerant controlstrategy eliminates the asynchrony of the reference signals and it also guarantees the coordinatedtracking control performance of the four LSRMs. Experimental results demonstrate that effectivecoordinated tracking control can be ensured, based on the successful agreement of reference signalsand an absolute tracking error falling within 2 mm can be achieved.
Keywords: linear switched reluctance machine; coordinated motion control network; signal agreement;tracking synchronization
1. Introduction
In industrial manufacture environment, there are many collaborative operations for multipleworking units to realize one ultimate task. The distributed working units, which are often driven byelectric machines, are often required to operate cooperatively. For example, in a processing line withmultiple linear operations, as shown in Figure 1, the entire processing task for the workpiece requiresone drilling machine, one screwing machine, one welding machine, and one painting machine tofinish the job. Traditionally, the processing task is realized in a sequenced manner, i.e., each machinecannot execute until its former machine is settled. If there occurs any positioning error from any of thelinear processing machines, then the entire precision is bound to deteriorate and the entire controlperformance will be affected. The overall processing task even collapses if any process fails [1]. If eachlinear machine can form as an individual motion control system and it has the controller, sensor, anddrives of its own, then the linear machines can work cooperatively by the communications among thelocal controllers from each linear machine, then the ultimate global task for the processing job can beaccomplished, without requiring any high-level supervisory administration or decision [2].
Since each linear machine belongs to the individual positioning control system locally, themachine accesses its individual reference signal. Therefore, each linear machine should be guided byits reference signal for correct positioning operations. This is because an appropriate motion control ofelectric machines depends on the external, reference signals of their own as a prerequisite. Positioningoperations inevitably suspend from the electric machines if the reference signals are interrupted [3].
Energies 2017, 10, 1426; doi:10.3390/en10091426 www.mdpi.com/journal/energies

Energies 2017, 10, 1426 2 of 15
drilling
direction of movement
welding screwing painting
conveyance belt
work piece
Figure 1. Concept of the processing line.
For the multi-processing line, the motion profiles of all the linear machines should first besynchronized to realize one ultimate tracking synchronization goal. Otherwise, if there occurs abreakdown or delay of one machine for a period of time, other linear machines will definitely fall intodisorder. Since the four linear machines are led by four reference signals, there unavoidably occursmotion coordination failure if the four reference signals of the different machines are independent andunrelated from each other. In other words, if unexpected deviations among the independent referencesignals exist, the motion of all the linear machines cannot be synchronized unless their reference signalsare agreed first.
Up till now, there is rare literature regarding the tracking synchronization of multiple lineardirect-drive machines, especially on the reference agreement of electric machines. Current coordinationstrategies focus on the design and optimization of the lower-level, cooperative tracking controlalgorithms to improve the relative error behaviors among all working units [2,3]. However, sincetracking coordination control cannot affect the external, independent reference signals, the relativeerror behaviors may deteriorate and the tracking control algorithms even malfunction if all the workingunits are driven by unrelated, asynchronous reference signals [4]. The correction of the asynchronousbehaviors from multiple reference signals and the coordinated tracking of multiple units can besimilarly considered as the agreement or consensus problem [5]. Article [6] reviews some recentprogress and results in the coordination and synchronization control of multi-agent networks, whichcan be categorized into the main research directions as formation, optimization, and estimation, etc.The effectiveness of the interaction within a consensus networked control system is discussed fromthe standpoint of its controllability properties [7]. In [8], consensus control is employed in the patternformation for various kinds of vehicles. The distributed coordination protocol design for multi-agentsystems with general linear dynamics and directed communication graphs is addressed in [9], basedonly on the agent dynamics and the relative states of neighboring agents. Qu etc. proposes a frameworkbased on matrix theory to analyze and design cooperative control algorithms for a group of vehicles,interacting with each other locally [10]. A second-order coordinated tracking problem of multiplethree-degrees-of-freedom laboratory helicopters is studied on directed communication topologies tocombat model nonlinearity and uncertainty [11]. Nevertheless, the above mentioned research workdemonstrates the effectiveness of the coordinated control methods theoretically and the performanceof the networked control systems is barely analyzed quantitatively.
For high-precision, one dimensional translational applications, the scheme of direct-drivelinear machines are advantageous over the solution of rotary motors coupled with mechanical

Energies 2017, 10, 1426 3 of 15
transmissions, since linear machines have fast response, high reliability, and the annihilation ofbacklashes, accumulated errors, etc. [12]. A linear switched reluctance machine (LSRM), which consistsof only silicon-steel plates and windings with no permanent magnet (PM) involved, is particularlysuitable for the operation under hostile environment. Compared to linear PM synchronous machines,the LSRM is more cost-effective, owing to its robust and stable mechanical structure. Therefore, theoverall system cost for the implementation of a coordinated linear motion control network is low [13].
Current research mainly concentrates on optimized machine design and control performanceimprovement of single switched reluctance machine based motion control systems [14–17]. In [14],a double-sided, asymmetric LSRM structure is proposed to ensure a higher force-to-volume ratio withmore acceleration, compared to a double-sided, symmetric counterpart with the same dimensionsand ratings [18]. For the performance enhancement from the control aspect, a nonlinear proportionaldifferential controller is introduced for the real-time LSRM based suspension system to achieve a betterdynamic response [17]. An adaptive controller is proposed to combat the difficulties and uncertaincontrol behaviors for a double-sided LSRM in [18], etc.
For the multi-procedure processing line, the asymmetric LSRMs with more force-to-volumeratio are more efficient than their symmetric counterparts. When multiple LSRMs are promptedcooperatively to achieve one desired synchronization goal, the entire network should first be led by acoordinated reference signal. Otherwise, each LSRM is compelled to follow its own reference signaland a synchronized motion of the four LSRM cannot be achieved. Meanwhile, the coordinated trackingcontrol of the four LSRMs should also be included to improve the control performance of the entirenetwork at the same time.
To tackle the problems discussed above, this paper first constructs a hierarchical, two-levelsynchronized motion control framework for the four distributed LSRMs based motion control network.The framework consists of two control levels: the reference signals agreement module and thecoordinated tracking control module. The upper-level reference signal coordination module isemployed to agree the reference signals for each LSRM and the function of the lower-level coordinatedtracking control module is to supervise each LSRM to track the reference signal coordinately.
The innovation of the paper can be summarized as follows. First, distributed motionsynchronization is investigated based on four independent, direct-drive, asymmetric LSRMs for thepotential applications of the multi-procedure processing line with the ability of cooperative operations.Second, a two-level, hierarchical, synchronization motion control scheme is realized for the proposedLSRMs network. Third, performance analysis proves that the proposed hierarchical control strategy issuperior to both the lower-level coordination synchronization alone of the four LSRMs network.
2. Theoretical Background
2.1. LSRM Modeling
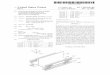
The machine structure can be found in Figure 2a,b. It employs an asymmetric structure to achievea higher force-to-volume ratio [14] and the double-sided machine structure further ensures a morestable and reliable output performance [18]. The LSRM consists of six stators with windings that formsphases AA’, BB’, and CC’. Instead of perfect mirroring along the moving platform, phase A from theupper axis corresponds to phase A’ at the lower right corner of the axis, phase B to B’ and phase C to C’,respectively. The teeth from the moving platform are not symmetric either. They appear alternativelyalong each side of the axis of the moving platform.
Major machine specifications can be found in Table 1. The four LSRMs can be regarded asidentical control objects with the same dimensions and ratings.

Energies 2017, 10, 1426 4 of 15
dgtp
l
A
A’B’ C’
B Cstator s
y
q
winding
moving platform
mover teeth
moving platform
supporter
A
A’B’ C’
B Cstator
winding
stator base
linear guide
encoder bracket
(b)
(a)
Figure 2. (a) machine structure and (b) picture.
Table 1. Main Specifiations of LSRM.
Quantity Value
Mass of moving platform 3.8 kgMass of stator 5.0 kgPole pitch 12 mmPole width 6 mmAir gap length 0.3 mmPhase resistance 2 OhmNumber of turns 200Stack length 50 mmRated power 250 WVoltage 50 VoltEncoder resolution 1 µm
The kinetic equation that governs the behavior of the i-th LSRM based motion control system canbe represented as [12] :
mid2xidt2 + Bi
dxidt
+ f li = fi (1)
where mi, xi, Bi, f li, and fi are the mass, position, friction coefficient, load force, and the electromagneticforce for the i-th LSRM, respectively. The i-th LSRM can be described in the voltage equation as,
uik = Rik iik +dΛik
dt, (k = A, B, C) (2)
where uik ,Rik , and iik are the terminal voltage, coil resistance, and current, respectively. Λik representsthe flux-linkage for the k-th winding.

Energies 2017, 10, 1426 5 of 15
2.2. Network Topology and Graph Theory
The LSRMs network can be mathematically abstracted as a graph, which is composed of a setof nodes and edges. In particular, given a coordinated network of N interconnected LSRMs, let thegraph be denoted by G = {V, E}, where the node set V = {1, . . . , N} is a collection of all LSRMs andthe edge set E ⊂ V ×V describes the topology of the interconnected network among the LSRMs. Anedge exists between node i and j (denoted by (i, j) ∈ E), if there is an information flow among thesenodes. The directed edge from node i to j denotes that node j can obtain the information from node ionly and the directed graph can be formed by the set of such directed edges. A directed path is a sequenceof directed edges in a directed graph and a directed tree is a directed graph in which there is only onenode, called the root, which has solely one directed path to all other nodes. A cycle is a directed paththat forms a closed loop [19].
A subgraph of G = {V, E} is a graph such that the sets of the nodes and edges are the subsets of{V, E}. A directed spanning tree Gt of G = {V, E} is a subgraph of G such that Gt is a directed tree andit has the same nodes as G. The adjacency matrix A = [aij] associated with G is defined as aij = 1 if(i, j) ∈ E and aij = 0 if (i, j) /∈ E. The Laplacian matrix associated with graph G is denoted as L = [lij],where lii = ∑ aij and lij = −aij, i 6= j, i, j = 1, · · · , N.
For example, the directed graph of four LSRMs based motion control systems can be illustrated inFigure 3 and the network topology shows that node 0 is the root and node 1–3 receive the directedinformation from node 0. Nodes 1 and 2 can communicate with each other while node 3 receives theinformation from node 0 only. Figure 3b is a subgraph and it forms a directed spanning tree from thegraph depicted in Figure 3a,c is a cycle.
0
1 2 3
0
1 2 3
node
edge0
1
2
3
(a) (b) (c)
Figure 3. Node and edge of graph: (a) directed graph, (b) tree, and (c) cycle.
3. Control Strategy
3.1. Reference Signal Consensus Module
To realize reference signals agreement, a first-order consensus algorithm is adopted. Sinusoidalwaveforms are selected as the reference signals and the initial phase ϕ (rad), angular frequencyω (rad/s), and amplitude A (mm) are represented as the agreement variables of the reference signals.The first-order consensus algorithm serves as the distributed feedback [20] and is responsible for thecorrection of variable ϕ, ω, and A to realize reference signal agreement.
The regulation processing of the three variables is modeled as single-integrator dynamics and thereference signals agreement algorithm for the i-th reference signal can be expressed as [21],
pi = −N
∑j=1
aij(
pi − pj)
, i = 1, . . . , N (3)
where pi =[ωi Ai ϕi
]Tdenotes the variable vector of the i-th reference signal and aij is the (i, j)
entry of the adjacency matrix A ∈ RN×N associated with the network topology of the interactionswith all reference signals based on the consensus algorithm. The necessary and sufficient condition

Energies 2017, 10, 1426 6 of 15
that guarantees the convergence of the closed loop dynamics governed by the consensus algorithmcan be found in [21]. It can be proved that all variables states of the reference signals converge toone common value by algorithm (3) if and only if the graph modeling the communication topologycontains a directed spanning tree.
3.2. Unit System Control
For each LSRM based unit system, the dual-loop control strategy is applied. The outer loop is aposition control and the inner is a current loop, respectively. The current control loop is responsible forcorrect current tracking and it derives the actual current output for each phase with proper responsetime and precision. Meanwhile, the current control loop is much faster than the position loop with aperfect tracking capability [17]. The multi-phase excitation with a look-up table linearization scheme isemployed to combat the nonlinearities of the LSRMs. The control diagram can be depicted as shown inFigure 4. For the i-th LSRM based unit system, position error ei is decided from the difference betweenthe command x∗i and the actual position xi of i-th LSRM, along with the difference information fromthe j-th machine ej. The position controller then calculates the control input f j and the multi-phaseexcitation with the look-up table linearization scheme determines the current command for the k-thwinding, according to the current position of the machine.
Figure 4. Unit system control scheme.
3.3. Coordinated Tracking Control Module
The extended second-order continuous-time consensus algorithm is employed as the coordinatedtracking control strategy [5] for the multiple LSRMs. The consensus algorithm for double-integratordynamics is formulated as [9],
xi = x∗i − α(ei + βei)−N
∑j=1
aij[(ei − ej) + β(ei − ej)
](4)
where ei = xi − x∗i and ej = xj − x∗j denote the difference between the actual and the desired positionfrom the i-th and the j-th unit system, respectively. α and β are positive scalar gains and aij is the(i, j) entry of the adjacency matrix A ∈ RN×N associated with graph G modeling the communicationtopology among multiple LSRMs. To save communication resources, the same communication linkscan be shared for both the upper and the lower level. In this paper, the communication topology ofreference signal agreement associated with A can be represented as A. The dynamics of the LSRMbased motion control system in (1) can also be expressed as,
xi = −Bimi
xi −1
mif li +
1mi
fi (5)

Energies 2017, 10, 1426 7 of 15
Substituting (4) into (5), the control input for the i-th LSRM system can be obtained as,
fi = Bidxidt
+ f li︸ ︷︷ ︸model compensation
+mi x∗i −miα(ei + βei)−mi
N
∑j=1
aij[(ei − ej) + β(ei − ej)
]︸ ︷︷ ︸
tracking synchronization
(6)
It is clear that the control input comprises the model compensation term and the trackingsynchronization term. The former is used to compensate the dynamics in the i-th unit system, and thelatter urges the i-th LSRM to track the i-th reference signal and coordinate with other LSRMs.
3.4. Stability Analysis
After substituting (6) into (5), we can obtain the closed-loop dynamics of the tracking error for thei-th LSRM as,
ei = −αei −N
∑j=1
aij(ei − ej)− βαei − βN
∑j=1
aij(ei − ej) (7)
The closed loop dynamics of the tracking error for the network can be reformulated in the matrixform as, [
ee
]=
[0N IN
−(αIN + L) −β(αIN + L)
] [ee
](8)
where e = [e1 e2 . . . eN ]T
is the error vector from all the machines and 0N and IN denote the Nby N full zero matrix and the identity matrix, respectively. L ∈ RN×N is the Laplacian matrix withrespect to G. Let,
Λ =
[0N IN
−(αIN + L) −β(αIN + L)
](9)
According to linear system theory, the necessary and sufficient condition ensuring the stability of theclose-loop system (8) is that all of the eigenvalues of matrix Λ must have negative real parts, as follows,
Re[λi(Λ)] < 0, i = 1, . . . , N (10)
where λi is the i-th eigenvalue of matrix Λ. Re(·) and Im(·) denote the real and imaginary parts of acomplex number, respectively.
Lemma 1. Given the matrix M =
[A BC D
], if block matrix A and C commute, it satisfies that det(M) =
det(AD− CB), where det(·) represents the determinant of a matrix [20].
According to Lemma 1, the characteristic polynomial of Λ is given by,
det (λI2N −Λ) = det
([λIN −IN
(αIN + L) λIN + β(αIN + L)
])(11)
= det[λ2 IN + (1 + βλ)(αIN + L)
]According to the definition of a matrix eigenvalue, (11) can further be reformulated as,
det[λ2 IN + (1 + βλ)(αIN + L)
]=
N
∏i=1
(λ2
i − (1 + βλi)κi
)(12)

Energies 2017, 10, 1426 8 of 15
where κi = −α + µi, i = 1, . . . , N is the eigenvalues of −(αIN + L) and µi, i = 1, . . . , N represents thei-th eigenvalues of −L. Equation (12) indicates that the roots of the characteristic polynomial of Λ canbe obtained by solving λ2
i − (1 + βλi)κi = 0. Therefore, the eigenvalues of Λ can be given by,
λi± =β(µi − α)±
√β2(µi − α)2 + 4(µi − α)
2(13)
=βκi ±
√β2κ2
i + 4κi
2
where λi− and λi+ are the eigenvalues of Λ associated with κi, µi.For any directed graph G, all nonzero eigenvalues of the Laplacian matrix L associated with the
graph G have positive real parts, that is, the eigenvalues µi of −L satisfy Re(µi) ≤ 0. Especially, thematrix −L has a simple zero eigenvalue and all other eigenvalues have negative real parts when thegraph G has a directed spanning tree [4]. Hence, we can see Re(κi) = Re(−α + µi) < 0, i = 1, . . . , Nfor any directed graph. Therefore, the real parts Re(λi±) of the eigenvalues λi± of matrix Λ can beinvestigated according to the eigenvalues κi of −(αIN + L). If Re(κi) < 0 and Im(κi) = 0, namelyκi < 0, then the eigenvalues of Λ satisfy obviously Re[λi(Λ)] < 0, i = 1, . . . , N for any β > 0, whereλi± are the eigenvalues of Λ associated with κi. Besides, if Re(κi) < 0 and Im(κi) 6= 0, it needs to beconsidered only that κi satisfies Re(κi) < 0 and Im(κi) > 0, because any κi that satisfies Re(κi) < 0and Im(κi) < 0 is a complex conjugate of κi that satisfies Re(κi) < 0 and Im(κi) > 0 [20]. In order toguarantee that all eigenvalues of Λ possess negative real parts, the following lemma is applied forobtaining the condition that β should satisfy under Re(κi) < 0 and Im(κi) > 0.
Lemma 2. Given
ρ± =γη ±
√γ2η2 + 4η
2(14)
where ρ and η denote two complex numbers and γ is a constant coefficient. If Re(η) < 0, Im(η) > 0 and:
γ >
√√√√ 2
|η| cos(
π2 − tan−1−Re(η)
Im(η)
) (15)
then Re(ρ±) < 0.
According to Lemma 2, the conclusion can be drawn directly that limt→∞
‖e‖ = 0 and limt→∞
‖e‖ = 0
can be satisfied for any graph G, if the scale gain α, β meet the following conditions:Case 1: Gain β satisfies β > 0, if κi associated with all the eigenvalues µi of −L meets Re(κi) < 0 andIm(κi) = 0.Case 2: β satisfies,
β > max∀Re(µi−α)<0& Im(µi−α)>0
√√√√ 2
|µi − α| cos(
π2 − tan−1−Re(µi−α)
Im(µi−α)
) (16)
if κi meets Re(κi) < 0 and Im(κi) 6= 0.
Remark 1. From the above mentioned stability analysis, the tracking synchronization algorithm degrades tothe independent tracking control of each LSRM in spite of the non-existence of any network topology. However,the tracking synchronization algorithm still ensures that each LSRM can correctly follow its reference signalindividually. It can also be concluded that the proposed low-level tracking synchronization scheme guaranteesboth the tracking and coordination performance of LSRMs, if there is a spanning tree in the graph. Generallyspeaking, a network topology often guarantees more than one direct spanning tree if there exists redundant edges.

Energies 2017, 10, 1426 9 of 15
Therefore, the loss of communication links will not affect the existence of direct spanning trees. From the aboveanalysis, the control structure owns certain fault-tolerance ability.
4. Network Construction
4.1. Simulation Analysis
The control block diagram according to the above analysis can be represented as shown inFigure 5a. The entire control strategy is divided in two parts, the upper-level reference agreementand the lower-level coordination synchronization, respectively. The reference parameters such asamplitude, frequency, and phase values are unified in the signal agreement block based on thefirst-order consensus algorithm. In the lower-level, the coordinated controller fi for each LSRM isderived from the second-order consensus algorithm. In addition, the coordinated controllers realizethe reference signal tracking synchronization through the communication topology.
time(s)
communication topology
10
3 2
...
...
+
-
reference signal
LSRM11f
LSRM4
signal
agreement
4f
coordination algorithm
high-level
low-level
(a)
(b) (c)
0 4 8 12 16-30
-20
-10
0
10
20
30
40
time(s)
po
sitio
n (
mm
)
y0
y1
y2
y3
0 4 8 12 16-30
-20
-10
0
10
20
30
po
sitio
n (
mm
)
r0
r1
r2
r3
Figure 5. (a) control block diagram of the LSRMs network, (b) simulation results of reference, and (c)actual signals.
The cycle topology is applied for the agreement of the reference signals, as shown in Figure 5b.The tree communication network topology is utilized for the synchronization of the four machinesaccording to Figure 5c. Table 2 tabulates the control parameters and eigenvalues associated with −Land Λ, respectively, according to the constraints from Case 1. It can be verified by stability analysisabove that all the parameters from Table 2 fall into the scope of stability. Table 3 defines the parameters.

Energies 2017, 10, 1426 10 of 15
Table 2. Controller Gains
Symbol Value
α 1β 1µ [−1 −1 −1 0]λ [−1± i −1± i −1± i −0.5± 0.866i]
Table 3. Parameter Definitions
LSRM Reference Signal Actual Signal Error Relative Reference Relative Position
i, j = 0, 1, 2, 3 ri − yi ri − rj yi − yj0 r0 y0 error0 err f01 erry011 r1 y1 error1 err f02 erry022 r2 y2 error2 err f03 erry033 r3 y3 error3 err f12 erry12
err f13 erry13err f23 erry23
The reference signals for the four LSRMs are sinusoidal waveforms with parameters arbitrarilyselected: the amplitudes are 15, 20, 25, and 30 mm and the frequency values are 5, 6, 6.5, and 7 rad/swith initial phase values of −45◦, 0◦, 60◦, and 90◦, respectively. It is clear that the position commandsignals are strongly asynchronous from each other. As shown in Figure 5b,c the simulation results, it isclear that the regulation time for reference signal agreement and actual output response are about 4.2 sand 4.5 s, respectively.
4.2. Experimental Setup
The networked control platforms utilize two dSPACE DS1104 boards with on-board 250 MHzfloating-point processors. The control boards directly interface with the Real-Time Workshop ofMATLAB/SIMULINK (R2015a, MathWorks, Natick, Massachusetts, USA) and all control parameterscan be modified online. Each control board connects two LSRMs and it has two 24-bit incrementalencoder channels, six channels of 12-bit digital-to-analog interface, two serial ports, and severalinput/output connection pins. The control platforms communicate with each other through the serialport interface.
Each closed loop unit position control system is composed of the LSRM, dSPACE interface,amplifiers, linear magnetic encoder, and power supply with transformers. As shown in Figure 6a theexperimental setups, each LSRM employs three commercial amplifiers for current loop regulation witha 10 kHz switching frequency based on the proportional integral algorithm. As shown in Figure 6b,the stators of the four LSRMs are fixed on an aluminum shelf and the linear magnetic encoders withthe resolution of 1 µm are mounted on the encoder brackets.

Energies 2017, 10, 1426 11 of 15
power supply
dSPACE interface① PC
②
②③
serial connectioninterface
⑥
⑥
amplifiers
①
③
③
④
④
⑤
⑤
transformers④
⑤
(a) (b)
Figure 6. experimental setup: (a) power supplies, drivers, controllers and (b) the LSRMs.
4.3. Network Configuration
The tree communication network topology from Figure 2b is realized as hardware as depicted inFigure 7. Since each dSPACE control platform manages two LSRMs, communication between unitsystem 0 to 1 is realized by direct connection without considering any communication data delays ordropouts. However, the communication between unit system 0 to 2 and 3 are realized by the serialport with RS232 protocol. The baud rate is 57,600 with data and stop bit set as 8 and 1, respectively.
reference
signal
communication interface 2
communication graph G
communication interface 1
communication interface 3
serial interface
direct connection
0
1 32
external signal
internal signal
in unit system
Figure 7. Hardware communication.
5. Experimental Results
For clear illustration of the independent and coordinated tracking behaviors of each machine,Table 3 defines the indices that characterize the control performance. Independent tracking behaviorsof any machine can be represented by; errori, since it represents the error response from the reference

Energies 2017, 10, 1426 12 of 15
signal ri to its actual output yi of the i-th machine; relative reference err fij illustrates the synchronizationperformance between the i-th and j-th reference signal; and relative position erryij depicts thecoordination behavior between the i-th and j-th LSRM.
5.1. Control Performance under Two-level Tracking Control
The dynamic position response waveforms under the proposed hierarchical synchronizationscheme can be found in Figure 8. From Figure 8a, it is clear that the reference signals from each LSRMsuccessfully synchronize after 4.8 s. The dynamic profiles of the signal agreement correspond to thosefrom simulation. Since there exist protection mechanisms to avoid collision from the stroke limit,the offset of the motion profiles is approximately zero. The actual output waveforms y for the fourmachines also synchronize since the four reference signals achieve agreement and the maximum errorvalues fall below ±2 mm from Figure 8b.
The relative reference profiles in Figure 8c further demonstrate the agreement of the fourreference signals. The relative position waveforms between any two LSRMs are illustrated inFigure 8d. It can be concluded that the four machines have achieved coordinated tracking afterthe agreement of the reference signals. The results prove the successful tracking coordination of fourLSRMs under asynchronous reference signals by employing the proposed hierarchical, two-levelsynchronization strategy.
0 2 4 6 8 10 12 14 16-25
-20
-15
-10
-5
0
5
10
15
20
25
time(s)
po
sitio
n (
mm
)
r0
r1
r2
r3
0 2 4 6 8 10 12 14 16-25
-20
-15
-10
-5
0
5
10
15
20
25
time(s)
po
sitio
n (
mm
)
y0
y1
y2
y3
0 2 4 6 8 10 12 14 16-50
-40
-30
-20
-10
0
10
20
30
40
50
time(s)
po
sitio
n (
mm
)
errf01
errf02
errf03
errf12
errf13
errf23
8 10
-0.2
0
0.2
0.4
14 16
-5
0
5
10
x 10-4
0 2 4 6 8 10 12 14 16-50
-40
-30
-20
-10
0
10
20
30
40
50
time(s)
po
sitio
n (
mm
)
erry01
erry02
erry03
erry12
erry13
erry23
8 10 12 14 16
-4
-2
0
2
4
(a) (b)
(d)(c)
Figure 8. Dynamic position response waveforms: (a) reference, (b) actual and (c) relative reference,and (d) relative position signals under hierarchical synchronization.

Energies 2017, 10, 1426 13 of 15
5.2. Performance under Lower-Level Tracking
It can be seen from Figure 9a,b that each LSRM is capable of independent tracking according to itsposition reference signal. In addition, error2 and error3 are higher from LSRM2 and LSRM3 than error0
and error1 from LSRM0 and LSRM1, since communication dropouts or delays, etc., inevitably affectthe performance of LSRM2 and LSRM3. The experimental results from Figure 9c also demonstrate thatas the reference agreement disappears, the lower-level, coordination synchronization algorithm is notcapable of proper tracking coordination of the LSRMs, due to the fact that each LSRM follows its ownreference signal, which serves as a strong external disturbance to other LSRMs. Therefore, withoutreference signals agreement, the lower-level tracking control only ensures independent tracking insteadof coordinated tracking performance.
0 2 4 6 8 10 12 14 16-50
-40
-30
-20
-10
0
10
20
30
40
50
time(s)
po
sitio
n (
mm
)
y0
y1
y2
y3
0 2 4 6 8 10 12 14 16-20
-15
-10
-5
0
5
10
15
20
time(s)
po
sitio
n (
mm
)
error0
error1
error2
error3
0 2 4 6 8 10 12 14 16-100
-80
-60
-40
-20
0
20
40
60
80
100
time(s)
po
sitio
n (
mm
)
12
13
23
erry01
erry02
erry03
erry
erry
erry
(a) (b)
(c)
Figure 9. Dynamic position response waveforms: (a) actual, (b) error, and (c) relative position signalsunder low-level tracking synchronization.
5.3. Performance under Independent Tracking
Figure 10 presents the output performance under four different reference signals whenboth upper-level reference agreement and lower-level, coordinated tracking control disappear.This simulates the situation that all synchronization strategies fail. The control strategy now degradesto independent tracking of the reference signal of their own with no coordination among the fourmachines. It can be seen that each LSRM strictly follows its own reference signal only, and the response

Energies 2017, 10, 1426 14 of 15
profiles are similar to the dynamic waveforms of relative position under the lower-level controlstrategy only.
0 2 4 6 8 10 12 14 16-100
-80
-60
-40
-20
0
20
40
60
80
100
time(s)
po
sitio
n (
mm
)
erry01
erry02
erry03
erry12
erry13
erry23
Figure 10. Dynamic position response waveforms of relative signals under independent trackingcontrol scheme.
6. Conclusions and Discussion
Based on the actual requirements of coordination of reference signals for linear machines, thispaper investigates a hierarchical, two-level synchronization control strategy for four coordinatedtracking control of direct-drive, double-sided asymmetric LSRMs. The proposed fault-tolerant,hierarchical coordination control strategy ensures the coordinated tracking performance of LSRMs ifthere exists a spanning tree in the network topology modeled by the graph. In addition, independenttracking performance can be ensured in spite of any communication among LSRMs. Comparativestudy demonstrates that successful coordinated tracking control takes the premise of the agreement ofreference signals, since asynchronous command signals serve as strong external disturbances to otherunit systems.
The applications of the four synchronized direct-drive, LSRMs can be targeted for theimplementation of the multi-processing line. The proposed hierarchical synchronization controlstrategy ensures the smooth operation of the processing line with certain position control precision.It can be expected that the proposed synchronization strategy is also suitable for the cooperativeoperation of multiple rotary or linear electric machines that require position or force coordinationamong machines.
Future research will focus on the implementation of the proposed algorithm on four digital,single-chip processors such as digital signal processors to further reduce performance deteriorationdue to communication limitations among unit systems. From current study, there lacks any closedcontrol scheme for the entire group system globally, since the information from each LSRM does notprovide any feedback to the network. Therefore, global closed loop control strategies are suggested tobe considered for further improvement of the synchronization motion control performance.
Acknowledgments: This work was supported in part by the National Natural Science Foundation of Chinaunder Grant 51477103, 51577121, 11572248, 61690211 and 61403258.The authors also would like to thankGuangdong and Shenzhen Government under the code of S2014A030313564, 2015A010106017, 2016KZDXM007,JCYJ20160308104825040 and JCYJ20170302145012329 for support.
Author Contributions: Bo Zhang and J.F. Pan conceived and wrote the paper main body and designed the mainbody of study. Jianping Yuan and Xiaoyu Wu guide the system designed, analyzed the data and revised themanuscript. Li Qiu performed the simulations and experiments. Jianjun Luo helped to revise the paper.

Energies 2017, 10, 1426 15 of 15
Conflicts of Interest: The authors declare no conflict of interest.
References
1. Olfati-Saber, R.; Fax, J.A.; Murray, R.M. Consensus and cooperation in networked multi-agent systems.Proc. IEEE 2007, 95, 215–233.
2. Zhang, H.; Lewis, F.L.; Qu, Z. Lyapunov, adaptive, and optimal design techniques for cooperative systemson directed communication graphs. IEEE Trans. Ind. Electron. 2012, 59, 3026–3041.
3. Movric, K.H.; Lewis, F.L. Cooperative optimal control for multi-agent systems on directed graph topologies.IEEE Trans. Autom. Control 2014, 59, 769–774.
4. Cao, Y.; Ren, W. Multi-vehicle coordination for double-integrator dynamics under fixed undirected/directedinteraction in a sampled-data setting. Int. J. Robust Nonlinear Control 2010, 20, 981–1000.
5. Ren, W. On consensus algorithms for double-integrator dynamics. IEEE Trans. Autom. Control 2008, 58,1503–1509.
6. Cao, Y.; Yu, W.; Ren, W.; Chen, G. An overview of recent progress in the study of distributed multi-agentcoordination. IEEE Trans. Ind. Inform. 2013, 9, 427–438.
7. Egerstedt, M.; Martini, S.; Cao, M.; Camlibel, K.; Bicchi, A. Interacting with networks: how does structurerelate to controllability in single-leader consensus networks? Control Syst. Mag. 2012, 32, 2137–2146.
8. Yu, W.; Zhou, L.; Yu, X.; Lu, J.; Lu, R. Consensus in multi-agent systems with second-order dynamics andsampled data. IEEE Trans. Ind. Inform. 2013, 9, 66–73.
9. Li, Z.; Wen, G.; Duan, Z.; Ren, W. Designing fully distributed consensus protocols for linear multi-agentsystems with directed graphs. IEEE Trans. Autom. Control 2015, 60, 1152–1157.
10. Qu, Z.; Wang, J.; Hull, R.A. Cooperative control of dynamical systems with application to autonomousvehicles. IEEE Trans. Autom. Control 2008, 53, 894–911.
11. Li, Z.; Liu, H.; Zhu, B.; Gao, H. Robust second-order consensus tracking of multiple 3-DOF laboratoryhelicopters via output feedback. IEEE/ASME Trans. Mechatron. 2015, 20, 2538–2549.
12. Szabo, L.; Viorel, I.A.; Chisu, I.; Kovacs, Z. A novel double salient permanent magnet linear motor.In Proceedings of the International Conference on Power Electronics, Drives and Motion (PCIM), Nürnberg,Germany, 1999.
13. Zhang, B.; Yuan, J.; Qiu, L.; Cheung, N.; Pan, J.F. Distributed coordinated motion tracking of the linearswitched reluctance machines based group control system. IEEE Trans. Ind. Electron. 2016, 63, 1480–1489.
14. Pan, J.F.; Zou, Y.; Cao, G. An asymmetric linear switched reluctance motor. IEEE Trans. Energy Convers. 2013,28, 444–451.
15. Park, J.; Jang, S.; Choi, J.; Sung, S.; Kim, I. Dynamic and experimental performance of linear-switchedreluctance machine with inductance variation according to airgap length. IEEE Trans. Mag. 2010, 46,2334–2337.
16. Amoros, J.G.; Andrada, P. Sensitivity analysis of geometrical parameters on a double-sided linear switchedreluctance motor. IEEE Trans. Ind. Electron. 2010, 57, 311–319.
17. Lin, J.; Cheng, K.W.E.; Zhang, Z.; Cheung, N.C.; Xue, X.; Ng, T. Active suspension system based on linearswitched reluctance actuator and control schemes. IEEE Trans. Veh. Technol. 2013, 62, 562–572.
18. Pan, J.F.; Zou, Y.; Cao, G. Adaptive controller for the double-sided linear switched reluctance motor basedon the nonlinear inductance modelling. IET Electr. Power Appl. 2013, 7, 1–15.
19. Mesbahi, M.; Egerstedt, M. Graph Theoretic Methods for Multiagent Networks; Princeton University Press:Princeton, NJ, USA, 2010; Chapter 6.
20. Ren, W.; Beard, R.W. Distributed Consensus in Multi-Vehicle Cooperative Control; Springer: London, UK, 2008;Chapters 3–4.
21. Ren, W.; Atkins, E. Distributed multi-vehicle coordinated control via local information exchange. Int. J.Robust Nonlinear Control 2007, 17, 1002–1033 .
c© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open accessarticle distributed under the terms and conditions of the Creative Commons Attribution(CC BY) license (http://creativecommons.org/licenses/by/4.0/).