Embed Size (px)
Citation preview
HAMMAD KHAN: LOCATION OPTIMIZATION OF BATTERY SWITCHING STATIONS FOR . . .
DOI 10.5013/IJSSST.a.13.3A.06 ISSN: 1473-804x online, 1473-8031 print 42
Location Optimization of Battery Switching Stations for the Linux, Wireless-Networked Mobile Robotic Workers in Industrial Units
Hammad Khan
Machine Intelligence Research (MIR) Labs. Bahawalpur, Pakistan
Abstract — Linux based mobile robots have been the real advancement towards wireless-networked robots in recent past, however the battery charging problems persists for such robots especially in industrial applications. Industrial usage requires LinuxBots to remain charged throughout the working hours while the constant charging is not possible during work. This paper proposed a solution in form of Battery switching stations (BSS) as part of industrial units providing constant charged batteries for robots. Problem with usage of BSS is that it consumes real power and thus without proper allocation they can cause the power losses in distribution systems to increase significantly. In this paper, IEEE 33-Bus distribution system with three distributed generators (DGs) has been used as the test system and locations for BSS units have been optimized using Artificial Bee Colony Algorithm. Usage of BSS along with DGs also provides the Green and Sustainable solution by using alternative energy resources. Keywords — Linux Based Robots, Battery Switching Systems, Distribution Generation, Artificial Bee Colony Algorithm, Location Optimization, Green and Sustainable solution.
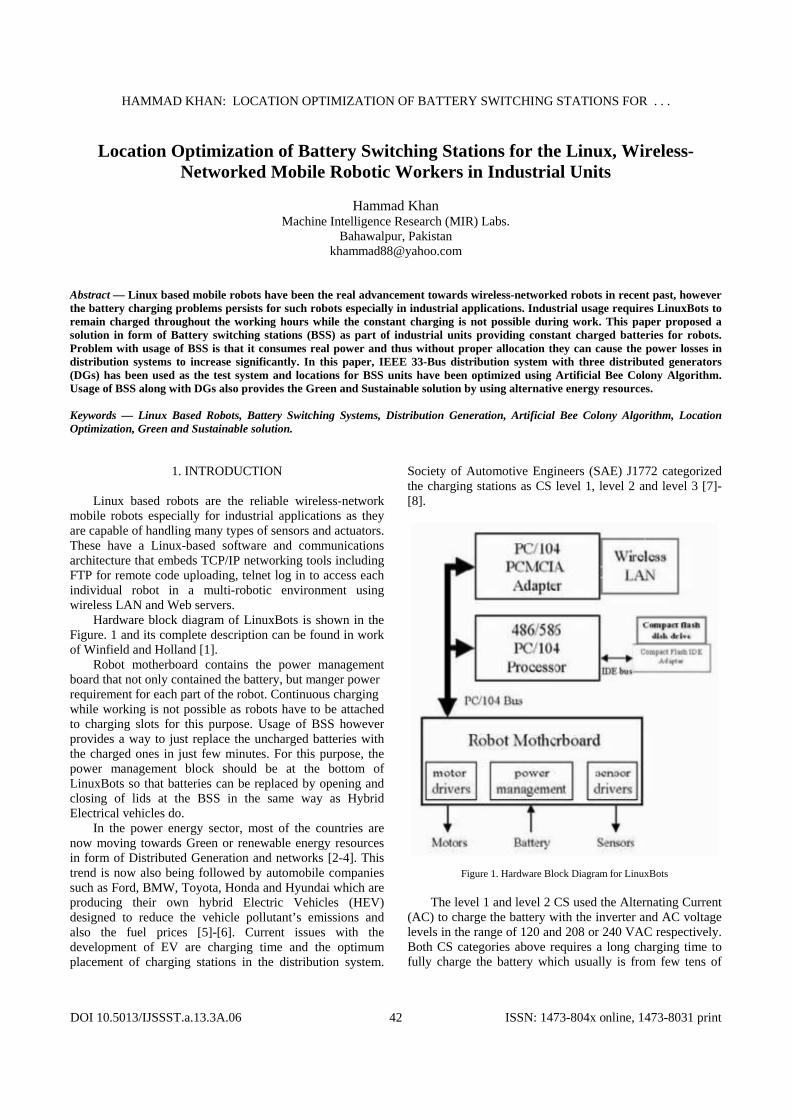
1. INTRODUCTION Linux based robots are the reliable wireless-network mobile robots especially for industrial applications as they are capable of handling many types of sensors and actuators. These have a Linux-based software and communications architecture that embeds TCP/IP networking tools including FTP for remote code uploading, telnet log in to access each individual robot in a multi-robotic environment using wireless LAN and Web servers. Hardware block diagram of LinuxBots is shown in the Figure. 1 and its complete description can be found in work of Winfield and Holland [1]. Robot motherboard contains the power management board that not only contained the battery, but manger power requirement for each part of the robot. Continuous charging while working is not possible as robots have to be attached to charging slots for this purpose. Usage of BSS however provides a way to just replace the uncharged batteries with the charged ones in just few minutes. For this purpose, the power management block should be at the bottom of LinuxBots so that batteries can be replaced by opening and closing of lids at the BSS in the same way as Hybrid Electrical vehicles do. In the power energy sector, most of the countries are now moving towards Green or renewable energy resources in form of Distributed Generation and networks [2-4]. This trend is now also being followed by automobile companies such as Ford, BMW, Toyota, Honda and Hyundai which are producing their own hybrid Electric Vehicles (HEV) designed to reduce the vehicle pollutant’s emissions and also the fuel prices [5]-[6]. Current issues with the development of EV are charging time and the optimum placement of charging stations in the distribution system.
Society of Automotive Engineers (SAE) J1772 categorized the charging stations as CS level 1, level 2 and level 3 [7]-[8].
Figure 1. Hardware Block Diagram for LinuxBots
The level 1 and level 2 CS used the Alternating Current (AC) to charge the battery with the inverter and AC voltage levels in the range of 120 and 208 or 240 VAC respectively. Both CS categories above requires a long charging time to fully charge the battery which usually is from few tens of

HAMMAD KHAN: LOCATION OPTIMIZATION OF BATTERY SWITCHING STATIONS FOR . . .
DOI 10.5013/IJSSST.a.13.3A.06 ISSN: 1473-804x online, 1473-8031 print 43
HAMMAD KHAN: LOCATION OPTIMIZATION OF BATTERY SWITCHING STATIONS FOR . . .
DOI 10.5013/IJSSST.a.13.3A.06 ISSN: 1473-804x online, 1473-8031 print 44
HAMMAD KHAN: LOCATION OPTIMIZATION OF BATTERY SWITCHING STATIONS FOR . . .
DOI 10.5013/IJSSST.a.13.3A.06 ISSN: 1473-804x online, 1473-8031 print 45

HAMMAD KHAN: LOCATION OPTIMIZATION OF BATTERY SWITCHING STATIONS FOR . . .
DOI 10.5013/IJSSST.a.13.3A.06 ISSN: 1473-804x online, 1473-8031 print 46
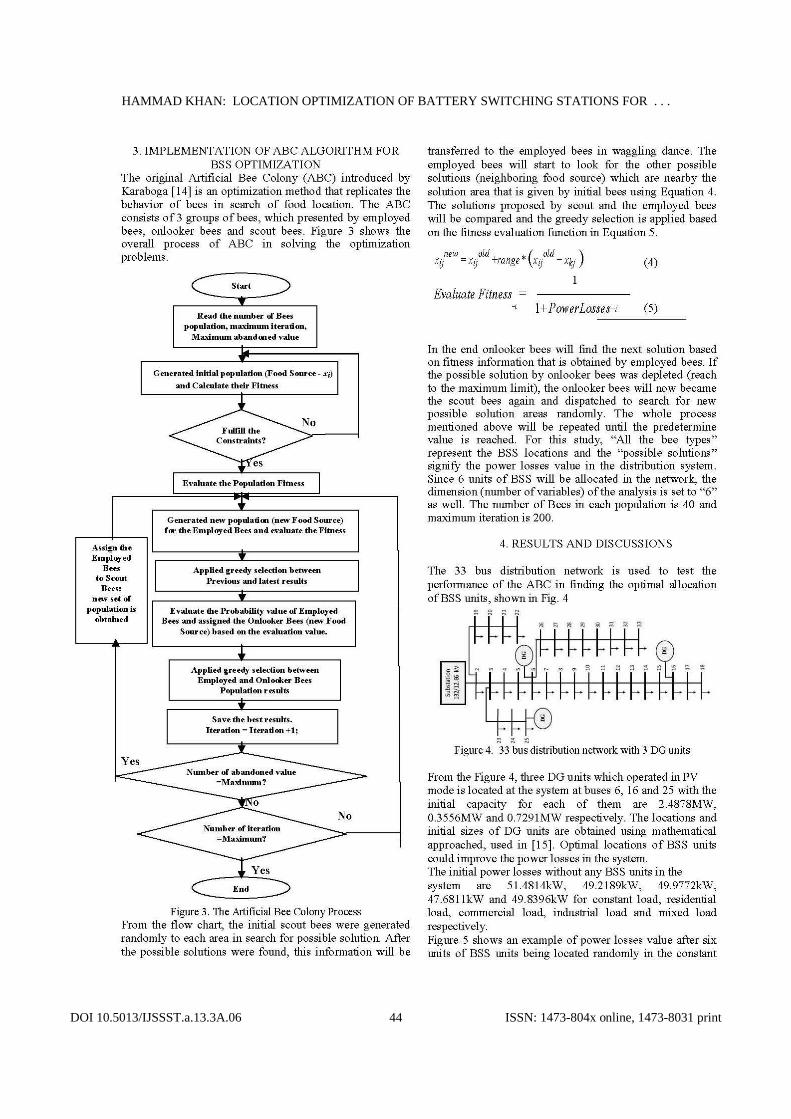
The ABC required less than 50 iterations to have the optimal location of BSS units. Besides that, the consistency in given a similar BSS results show that the capability of the ABC in finding the best location for BSS in the system where the standard deviation value for all five samples is 1.5x10-23. TABLE 4. THE OPTIMAL BSS ALLOACATION RESULTS FOR 10
SAMPLES ON MIX LOAD ANALYSIS Sample BSS1 BSS 2 BSS3 BSS 4 BSS 5 BSS 6
1 7 7 26 26 6 6 2 6 26 7 6 26 7 3 7 26 6 26 6 7 4 6 7 26 6 7 26 5 7 6 26 7 6 26
From the whole discussion in this analysis, ABC algorithm Can determine the optimal location for BSS units in the system even with different load type analysis and it gave power losses improvement to the non-optimized DG units in the distribution system.
5. CONCLUSION Utilization of LinuxBots in industrial units and for the human immune environments was restricted by the need of continuously charged batteries for their smooth operation and that can be achieved with the help of Battery switching stations in the industrial units, however these BSS units can cause the significant power losses in distribution systems if they are not located optimally, thus the use of ABC in this paper resulted in finding the optimal locations of BSS units with reduction in power losses. The results show that optimal locations for BSS units are 2, 6 and 26 where all these locations contain two BSS units each. Although locations are the same however the loads were different varying from constant loads like BSS to industrial loads. Impacts to the minimum power losses value, voltage profile and their improvement are different as well. Therefore the above presented method not only be used to optimized the location of BSS for the availability of charged batteries for LinuxBots but also can be used for other commercial and industrial loads along with facilitation for Hybrid Electrical Vehicles in that particular industrial area. Distribution planner with the help of results achieved in this paper can include the BSS units in the distribution network without affecting the system as much. Use of BSS is only economical but also sustainable with the use of renewable energy in DGs. Future of BSS is really bright not only for automobile industries but also for the overall industrial units with providing the charged batteries not only to LinuxBots but also many other electromechanical Control systems.
REFERENCES
[1] Winfield AFT and Holland OE, ‘The Application of Wireless Local area network technology to the control of Mobile Robots’, Microprocessors and Microsystems Journal (Elsevier),Vol 23, pp597-607, 2000.
[2] SS. M. Moghaddas-Tafreshi and E. Mashhour, “Distributed generation modeling for power flow studies and a three-phase unbalanced power flow solution for radial distribution systems considering distributed generation,” Electric Power Systems Research, vol. 79, pp. 680-686, 2009.
[3] SST. Niknam, et al., “A modified honey bee mating optimization algorithm for multiobjective placement of renewable energy resources,” Applied Energy, vol. 88, pp. 4817-4830, 2011.
[4] SL. Hee-Jin, et al., “Study on Wind-Turbine Generator System Sizing Considering Voltage Regulation and Overcurrent Relay Coordination,” Power Systems, IEEE Transactions on, vol. 26, pp. 1283-1293, 2011.
[5] SV. Marano, et al., “Vehicle electrification: Implications on generation and distribution network,” in 2011 International Conference on Electrical Machines and Systems (ICEMS), pp. 1-6, 2011.
[6] SF. Pieltain, et al., "Assessment of the Impact of Plug-in Electric Vehicles on Distribution Networks," Power Systems, IEEE Transactions on, vol. 26, pp. 206-213, 2011.
[7] SJ. D. Graham, “Plug-in Electric Vehicles:A Practical Plan for Progress,”School of Public and Environmental Affairs at Indiana University,Bloomington, Indiana, February 2011.
[8] SS. Wencong, et al., “A Survey on the Electrification of Transportation in a Smart Grid Environment,” IEEE Transactions on Industrial Informatics, vol. 8, pp. 1-10, 2012.
[9] SC. Bai, et al., “Analyzing the impact of electric vehicles on distribution networks,” 2012 IEEE PES in Innovative Smart Grid Technologies (ISGT), pp. 1-8, 2012.
[10] SY. Chen, et al., “Integration of electric vehicle charging system into distribution network,” 2011 IEEE 8th International Conference on Power Electronics and ECCE Asia (ICPE & ECCE), pp. 593-598, 2011.
[11] N. R. E. L. (NREL), "Plug-In Electric Vehicle Handbook " April 2012.
[12] SM. Etezadi-Amoli, et al., "Rapid-Charge Electric-Vehicle Stations," IEEE Transactions on Power Delivery, vol. 25, pp. 1883-1887, 2010.
[13] SE D. Singh, D. Singh, K. S. Verma, “Multiobjective Optimization for DG Planning With Load Models,” IEEE Trans. Power Syst., vol. 24, no. 1, pp. 427-436, Feb. 2009.
[14] Karaboga, N., A New Design Method on Artificial Bee Colony Algorithm for Digital IIR Filters, Journal of the Franklin Institute 346, pp. 328-348, 2009.
[15] KM. P. Lalitha, Reddy, V.C.V., Usha, V.:, "Optimal DG placement for minimum real power loss in radial distribution systems using PSO," J. Theor. Appl. Inf. Technol., vol. 13, pp. 107–116, 2010.