Embed Size (px)
Citation preview

Research ArticleLow Cost Antenna Array Based Drone Tracking Device forOutdoor Environments
Marcos T de Oliveira 1 Ricardo K Miranda 2 Joatildeo Paulo C L da Costa34
Andreacute L F de Almeida 5 and Rafael T de Sousa Jr 2
1Department of Mechanical Engineering Faculty of Technology University of Brasılia Brazil2Department of Electrical Engineering Faculty of Technology University of Brasılia Brazil3Department of Electrical Engineering andDepartment ofMechanical Engineering Faculty of Technology University of Brasılia Brazil4Elektronische Fahrwerksysteme GmbH Ingolstadt Germany5Wireless Telecom Research Group Federal University of Ceara Fortaleza CE Brazil
Correspondence should be addressed to Marcos T de Oliveira socramteixgmailcom
Received 1 March 2019 Revised 18 May 2019 Accepted 2 June 2019 Published 27 June 2019
Academic Editor Miguel Garcia-Pineda
Copyright copy 2019 Marcos T de Oliveira et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Applications of direction of arrival (DoA) techniques have dramatically increased in various areas ranging from the traditionalwireless communication systems and rescue operations to GNSS systems and drone tracking Particularly police forces andsecurity companies have drawn their attention to drone tracking devices in order to provide the safeness of citizens and of clientsrespectively In this paper we propose a low cost antenna array based drone tracking device for outdoor environmentsThe proposedsolution is divided into hardware and software partsThe hardware part of the proposed device is based on off-the-shelf componentssuch as an omnidirectional antenna array a 4-channel software defined radio (SDR) platform with carrier frequency ranging from70MHz to 6 GHz a FPGAmotherboard and a laptopThe software part includes algorithms for calibration model order selection(MOS) and DoA estimation including specific preprocessing steps and a tensor-based estimator to increase the DoA accuracyWe evaluate the performance of our proposed low cost solution in outdoor scenarios According to our measurement campaignswe show that when the array is in the front fire position ie with a DoA ranging from minus60∘ to 60∘ the maximum and the averageDoA errors are 6∘ and 19∘ respectively
1 Introduction
Applications of direction of arrival (DoA) techniques havedramatically increased in various areas ranging from thetraditional wireless communication systems [1 2] and rescueoperations [3] to GNSS systems [4ndash7] and drone trackingin public and private events In the last years UnmannedAerial Vehicles (UAVs) have been amajor concern of airspacecontrol bodies and military due to possible terrorist attacksand illegal activities In 2015 there were more than ninehundred incidents involving drones and aircrafts in theUnited States [8] whereas in April 2016 a UAV reached anaircraft landing at the Heathrow airport in London [9] In2016 in Dubai four drones invaded the airport interrupting
the landings and take-offs causing an estimated loss of onemillion dollars [10] In October 2017 in Canada the firstreported collision of a drone and a commercial airplane hasoccurred [11] Recently police forces and security companieshave drawn their attention to drone tracking devices in orderto provide the safeness of citizens and of clients respectivelyIn this sense the development of low cost devices for dronetracking is fundamental to fit such demands
In general the DoA estimation techniques can be broadlyclassified into conventional beamforming techniques maxi-mum likelihood techniques and subspace-based techniques[12ndash14] In [15] the authors proposed to estimate the DoA of asignal impinging the Electronically Steerable Parasitic ArrayRadiator (ESPAR) antenna with twelve parasitic elements by
HindawiWireless Communications and Mobile ComputingVolume 2019 Article ID 5437908 14 pageshttpsdoiorg10115520195437908
2 Wireless Communications and Mobile Computing
using a support vector machine (SVM) technique In theanechoic chamber the result of the experiments reaches 067∘estimation error No hardware details were provided
To overcome the effects of multipath propagation onthe performance of DoA estimation the authors of [16]proposed a frequency domainmultipath resolution subspace-based approach which makes RSS-based DoA estimationapplicable in multipath scenarios for small-size and low-power sensor networks This approach was verified withMonte Carlo simulations with high SNR
Aiming at the growth of connected cars systems theauthors in [17] developed a 4times4 MIMO antenna systemand proposed the DoA function for a circular phased arrayantenna Since the focus of this paper is on the methodologyand basic characteristics of DoA function no measurementor hardware information was provided
In [18] DoA estimation using an ESPAR with 12 parasiticelements and one active monopole is carried out for wirelesssensor network (WSN) applications The authors calibratedthe ESPAR array using an anechoic chamber Since thefocus of [18] is on the calibration no outdoor or indoormeasurement campaigns were performed by the authors
An improvement of ESPAR antennas is proposed in[19] The authors developed a Multiple Beam Parasitic ArrayRadiator (MBPAR) antenna that can realize six beams at thesame time without the use of diodes which increases thecommunication capacity To validate the proposed design aprototype was fabricated at 245 GHz The antenna has theefficiency from 942 to 957 over the 24G-WLAN bandsNo DoA measurements were provided
In [20] a square shaped 16 element antenna array isconnected to switches so that a four-channel SDR can selectfour antennas at each side of the square allowing a 360∘DoA estimation in outdoor environments Each side of thesquare performs a plusmn45∘ azimuth estimation According to theauthors three Yagi antennas were used as sources at specificpoints and a maximum DoA error of 5∘ is achieved Noinformation is provided about the real distance between thesources and the receive array
In [21] a four-element quasi-Yagi antenna array systemis applied for DoA estimation using the MUSIC algorithmwhereas the Minimum Description Length (MDL) criterionis used to estimate the number of dominant multipathcomponents Only two measurements were performed fortwo specific positions showing an error of 1∘ However noinformation is provided about the experimental scenario
In [22] several DoA estimation techniques are comparedconsidering a horizontal uniform linear array (ULA) with12 elements inside an anechoic chamber The measurementswere conducted varying the DoA from minus20∘ to 20∘ in steps of4∘TheDoA estimation errors were smaller than 2∘TheMin-Norm approach [12] outperformed MUSIC [23] although ithas a higher standard deviation
Finally in [24] the authors developed system using five-port reflectometers that allow simultaneously measuring theDoA and Time of Arrival (ToA) of coherent and incoherentsignals connected to seven quasi-Yagi antennas with onereflectometer for each antenna The MUSIC algorithm isapplied for the DoA estimation providing an error of 2∘ for
one source and 05∘ for two sources The measurements wereperformed in a nonreflective environment
In order to detect the presence of drones and to trackthem there is a variety of mechanical optical or antennaarray based solutions in the market For instance themechanical solution in [25] detects a drone within 3 km fortargets up to 55 cm in diameter and classifies the model of thedrone within 11 kmThe position accuracy (azimuth) in [25]is 1∘ In [26] a rechargeable portable drone tracking devicecandetect and indicate the direction of a drone in a 360∘ planeeven with weak line of sight (LoS) component The device in[26] allows the communication with other devices by usingan Application Programming Interface (API) framework Notechnical information and patent about the principles behindthe device in [26] and its DoA accuracy were provided In[27] an antenna array based system is shown to detect witha 1 km range and with 1∘ accuracy or with a 7 km range andwith 3∘ accuracy
In [28] a mobile application (app) is proposed for dronedetection According to the developers the app has anaverage range of 106 meters The system allows the detectionof almost 95 of all types of drones However the solutionin [28] does not indicate the position or the direction of thedrone
In terms of drone tracking there are recent works onreceived signal strength (RSS)-based DoA estimation Forexample [29 30] propose to estimate the DoA using arrays ofYagi-Uda directional antennas for the localization of dronesexploiting by their incoming NTSC signal in a measurementcampaign The work [29] proposes a complete hardware andsoftware framework using arrays of directional antennas andformulates a novel DoA estimation correction procedure In[30] a novel DoA estimation algorithm for the localizationof drones is validated by using an AD-FMCOMMS5-EBZsoftware defined radio (SDR) Finally [31] implemented teststo detect and locate UAVs at 900MHz The authors usedMUSIC combined with spatial smoothing and MDL Thework [30] has a similar objective to our proposal howeverthe authors did not concern in to present the accuracy of thesystem and in use of low cost equipment
In this paper we propose a low cost antenna array baseddrone tracking device for outdoor environments To the bestof our knowledge there are no state-of-the-art low costoff-the-shelf antenna array based devices applied to dronetracking The problem of drone tracking is challenging dueto the several possible modulation schemes for the datatransmission multipath propagation and the possible longoperational distances The proposed framework can alsoexploit tensor-based techniques such as the Parallel FactorAnalysis (PARAFAC) In contrast to the subspace-basedmethods the tensor-based approach shows to be robust inreal scenarios
The remainder of this paper is divided as follows InSection 2 the data model is presented Next in Section 3 wepropose a low cost antenna array based drone tracking devicefor outdoor environments including a complete descriptionof the hardware and software and the steps involved forassembling calibration and signal processing In Section 4we validate our proposed solution by means of measurement
Wireless Communications and Mobile Computing 3
campaigns in an outdoor scenario In Section 5 conclusionsare drawn
2 Data Model
We assume 119889 be far-field sources transmitting narrow-bandsignalsThese planar wavefront signals impinge over a receiveantenna array with 119872 omnidirectional elements that areuniformly and linearly disposed The space Δ between twoadjacent antennas is equal to 1205822 where 120582 is the wavelengthof the carrier signal The received signals at the antenna arraycan be written in a matrix form as follows
X = AS +N isin C119872times119873 (1)
where A isin C119872times119889 is the steering matrix and its 119894-th steeringvector is given by
a (120583119894) = [1 119890119895120583119894 1198902119895120583119894 sdot sdot sdot 119890119895(119872minus1)120583119894]T isin C119872times1 (2)
where 120583119894 is the spatial frequency that can be mapped intothe direction of arrival of the 119894-th source 120579119894 by the followingexpression 120583119894 = 2120587Δ sin 120579119894120582 S isin C119889times119873 is the symbol matrixwith N being the number of snapshots N isin C119872times119873 stands forthe noisematrix whose elements are assumed to beComplex-Valued Circularly Symmetric Gaussian and identically andindependently distributed (iid) random variables
Given (1) and assuming that the noise and the signal areuncorrelated the covariance matrix can be computed by
RXX = E xxH = ARSSAH + RNN (3)
where x is one column vector from X (sdot)H is the Hermitianoperator and 119864sdot is the expected value operator In practicethe sample covariance matrix is calculated as follows
RXX = XXH
119873 isin C119872times119872 (4)
The DoA techniques used along this paper exploit thesample covariance matrix in (4) As shown in Section 3the matrix X is preprocessed before we compute the samplecovariance matrix RXX
The goal of our proposed drone tracking device is to esti-mate the direction of arrival (DoA) 1205791 of the line of sight (LoS)component from a drone in an outdoor scenario We assumethat there is no obstruction of the LoS component Thereforethe LoS component is assumed to have the greatest power incomparison with the non-LoS components Mathematicallywe can express it as1003817100381710038171003817a (1205831) s (1205831)1003817100381710038171003817F gt 1003817100381710038171003817a (120583119894) s (120583119894)1003817100381710038171003817F (5)
for 119894 = 2 119889 The operator sdot F stands for the Frobeniusnorm
3 Proposed Low Cost Antenna Array BasedDrone Tracking Device
In this section we detail the proposed low cost antenna arraybased drone tracking device In Section 31 we describe the
To PC
uProc amp FPGAMotherboard
SDRDaughterboard
Power Divider
TX
RX
Figure 1 Assembled components for the hardware calibrationof four receive channels The components are a microprocessor(uProc) a FPGA motherboard a SDR a power divider and cables
steps for the hardware calibration The calibration ensuresphase alignment for all the four channels of the SDRallowing the DoA estimation In Section 32 we present theassembling of the hardware components of the proposeddrone tracking device In Section 33 we propose a signalprocessing framework for DoA estimation
31 Hardware Assembling for the Calibration In order toperform the measurements the SDR should be calibratedsuch that all the receive channels become in phaseThe phaseimbalance may be caused by different time initialization ofthe oscillators and by hardware imperfections The hardwarevendor provides a software [32] for clock calibration of thelocal oscillator However this software does not performphase calibration
Therefore in order to perform the phase calibrationthe hardware components are first assembled according toFigure 1 Note that the SDR transmits the signal from onechannel and receives it in four channels that should becalibrated
As shown in Figure 1 the SDR is a 4times4 MIMO plat-form named ADFMCOMMS5 [33] with two AD9361 [34]Integrated Circuits (ICs) that contain 2 transmitters and tworeceivers each ranging from 70 MHz to 60 GHz and havea channel bandwidth ranging from 200 kHz to 56 MHzThe platform is connected to a microprocessor and a FPGAmotherboard [35] that configures the SDR and transmits theSDR data to the PC As shown in Figure 1 the cables forcalibration should have the same length Moreover a powerdivision component is included in order to lead the signal tothe four receive channels at the same time and to reduce thepower of the transmitted signal to avoid damaging
To compensate the phase errors previously explained thefirst step is to extract the phase of the elements of the matrixX The phase 120601(119898 119894) is defined as follows
120601 (119898 119894) = ang119909 (119898 119894) = arctan ( Im 119909 (119898 119894)Re 119909 (119898 119894) ) (6)
where 119909(119898 119894) is the element in position 119898 119894 of the measuredmatrixXThe operators ang Imsdot and Resdot stand for the phaseoperator the imaginary part of a complex number and thereal part of a complex number respectively
4 Wireless Communications and Mobile Computing
RX A1 RX A2 RX A3 RX A4
Figure 2 Proposed low cost antenna array based drone trackingdevice with 4 element ULA and a 4 times 4 MIMO SDR
Since each channel is related to each line of the matrix Xin order to compute the phase shift between two channels wecompute the phase difference of two consecutive antennas
120596 (119898 ) = Φ (119898 ) minusΦ (119903 ) isin C1times119873 (7)
where Φ stands for the matrix containing the calculatedphases by (6) 119903 indicates the reference channel and119898 variesfrom 1 toMThis reference channel can be randomly selectedfrom 1 to 119872 and is the input of the SDR that is used as areference to compensate the phase imbalance from the otherinputs Since the vector 120596(119898 ) is the119898-th row ofmatrixΩ incase119898 = 119894 the 119894-th row ofΩ is filled with zeros Finally sincethe phase difference may slightly vary for different samples inthe same row of Ω due to the thermal noise we compute thearithmetic mean of the elements of each row of Ω obtainingthe vector 120596 isin C119872times1 and its119898-th element is given by
120596 (119898) = 1119873119873sum119899=1
Ω (119898 119899) (8)
Hence in order to compensate the phase shift betweentwo different channels we compute the vector c isin C119872times1 The119898-th element is given by
c (119898) = eminus119895120596(119898) (9)
Note that the compensation vector c is computed only oncefor the system initialization The calibrated outputs of theantenna array are given by the following expression
Xc = diag cX (10)
where the operator diagsdot transforms its argument vectorinto the main diagonal of a diagonal matrix
32 Hardware Assembling for the Drone Tracking Measure-ment Campaign After the hardware has been calibratedthe next step is to assembly it in order to perform themeasurements
The four-element omnidirectional antenna array is con-nected to the calibrated hardware composed of the FPGAmotherboard and SDR daughterboard according to Figure 2Each antenna is dual band (from 2400MHz to 24835MHz
and from 4900 MHz to 5875 MHz ) [36] and has linearpolarization with 37 dBi of gain The space Δ between twoconsecutive antennas is equal to 599 cm The operationalfrequency119891 = 25GHz is themaximum frequency that avoidsaliasing
33 Framework for DoA Estimation Here we first propose asample selection approach for DoA estimation by automaticphase deviation detection Then we formulate a DoA esti-mation framework exploiting preprocessing techniques andmodel order selection schemes
Figure 3 depicts the flowchart of the proposed signalprocessing solution for DoA estimation
As shown in Box 2 of the Figure 3 the phase deviationcorrection proposed in Section 31 returns a matrix Xc that isused in the sample selection scheme in Section 331
331 Sample Selection for DoA Estimation by AutomaticPhase Deviation Detection As exemplified Xc in Figure 4empirically we observed that the hardware causes phasedeviations on the samples in random time instantsThereforewe propose an approach to select the samples with phasedeviations for the DoA estimation
Note that the phase compensation proposed in Section 31has been applied to the samples whose matrix Φ containingthe phases are depicted in Figure 4 Furthermore note thatthere are significant deviations that can degrade the DoAestimation process The main objective here is to removethese phase deviations
As shown in Figure 5 such ripples can be better visualizedby computing the phase difference in the time dimensionaccording to the following expression
120574 (119898 119894) = (120601 (119898 119894 + 1) minus 120601 (119898 119894))2 (11)
where 120574(119898 119894) is the value containing the quadratic differenceof two consecutive time samples 119894 and 119894 + 1 of the 119898-thchannelThe120601(119898 119894) from (6) is the element in position (119898 119894)of the matrix Φ
Figure 5 draws the Γ that contains the result of (11) Bydetecting the peaks we can identify which samples shouldbe removed For this task we apply the approach proposedin [37] which returns the green curve with the value of thethresholdTherefore the samples whose phase differences aregreater than the threshold are removed The result after thesamples removed is presented in the following equation
Xcs = [Xc ( 1 1198731) | Xc ( 1198732 1198733) | sdot sdot sdot |Xc ( 119873119879minus1 119873119879)] (12)
where Xcs is the matrix with the selected samples Note that119873119879 = 119873 and the values of N119905 for 119905 = 1 119879 are found bycomparing the phase difference values with the threshold inFigure 5
332 DoA Estimation Framework According to Figure 3the matrix Xcs given in (12) is used to improve the DoAestimation with preprocessing schemes There are several
Wireless Communications and Mobile Computing 5
Phase DeviationCorrection
(Section 31)2 3 4
5
1
6
Xc Xcs
Xcs XcsX Z
Sample Selectionvia [25]
Optional Pre-Processing
(Section 332)
Direction of ArrivalEstimation(Table 1)
Model OrderSelection
(Section 332)
Capturateddata X
d 1
Figure 3 Flowchart of the proposed solution for DoA estimation
Samples (time)
Phas
e (deg)
0
2
4
6
8
10
12
14
Antenna 1 Antenna 2
Antenna 3 Antenna 4
0 1 286
88
9
92times104
times104
times105
times1060 05 1 15 2 25 353 4 45
Figure 4 Phase of the received data in each antenna An exampleof phase deviation region is highlighted in the zoom area
Samples (time)
Der
ivat
ive o
f pha
se (r
ad)
0
05
1
15
2
25
3
Antenna1Antenna2Antenna3
Antenna4Threshold via [24]
32 33 34 35 36 37 38 39times106
Figure 5 Difference between consecutive samples from Figure 4
DoA estimation schemes in the literature such as beamform-ing approaches and subspace-based approaches Examplesof beamforming are Delay and Sum [38] and Capon [39]whereas examples of classical subspace-based approaches areMUSIC [23] and ESPRIT [40]
The DoA estimation schemes assume that the modelorder 119889 is known In practice model order selection tech-niques should be applied to estimate the model order 119889 asdepicted in Figure 3
In the flowchart of Figure 3 we adopted the ExponentialFitting Test (EFT) [43 44] as the model order selectionscheme The EFT has the deflation property that allows usto find suitable thresholds as a function of the Probabilityof False Alarm (Pfa) By exploiting the deflation propertyand by finding suitable thresholds the EFT has been theonly scheme in the literature to estimate 119889 = 1 in thepresence of a strong LoS signal and 119889 = 0 in the onlynoise (no signal) measurements We have compared severalschemes in the literature such as Akaike Information Crite-rion (AIC) [45] Efficient Detection Criterion (EDC) [46]Minimum Description Length (MDL) [47] Steinrsquos unbiasedrisk estimate (SURE) [48] RADOI [49] ESTimation ERror(ESTER) [50] and Subspace-based Automatic Model OrderSelection (SAMOS) [51] The M-EFT [43 44 52] has alsobeen suitable but an even smaller Pfa was required tofind the thresholds The computation of the thresholds ofthe EFT requires an extremely low Pfa The complexity ofsuch a computation is prohibitive Therefore we propose inAppendix A an extrapolation algorithm to compute suchthresholds Note that our proposed extrapolation algorithmhas been applied in [53ndash56] although no details are providedThe reason for extremely low Pfa may be related to thenoise behaviour as shown in Appendix B Note that theIlmenau Package for Model Order Selection (IPM) [57]with MATLAB and Java implementation of the model orderselection schemes can be found at the LASP homepage(httpslaspunbbrindexphppublicationssoftwares)
In order to further improve the accuracy of DoA esti-mation schemes preprocessing schemes can be appliedbeforehand We consider in this work the VandermondeInvariation Technique (VIT) [58] Spatial smoothing (SPS)[59] and Forward Backward Averaging (FBA) [60 61] asa preprocessing schemes As depicted in Figure 3 after the
6 Wireless Communications and Mobile Computing
Table 1 Selected state-of-the-art DoA estimation schemes
Delay And Sum [38] 119875DS (120579) = w (120579)H Rxxw (120579)w (120579)H w (120579) (13)
Capon [39] 119875CAP(120579) = 1w (120579)H Rminus1xxw (120579) (14)
MUSIC [23] 119875M119880119878119868119862(120579) = 1wH (120579)VnVH
nw (120579) (15)ESPRIT [40]
Ψ = J1U+s J2Us (16)Ψ
EVD= EΦEH with Φ = diag [1206011 120601119889] (17)120583119894 = ang(120601119894) 119894 = 1 119889 (18)preprocessing step a matrix Z is returned and used by theDoA methods summarized in Table 1
In Table 1 the vector w(120579) in (13) (14) and (15) varyaccording to the candidate values of 120579 The value of 120579 thatmaximizes the expression in (13) (14) and (15) is the 1205791since in Section 2 the data model assumes that the LoScomponent faces no obstacles Therefore the componentcorresponding to the greatest power should be the samecomponent with DoA equal to 1205791 Us isin C119872times119889 is signalsubspace which is equal to the 119889 eigenvectors correspondingto the 119889 greatest eigenvalues whereasVn isin C119872times119872minus119889 is a basisfor the noise subspace composed by the119872minus 119889 eigenvectorsassociated with to the 119872 minus 119889 smallest eigenvalues In (17)and (18) Φ is the diagonal matrix that has the eigenvaluesof Ψ We compute all the spatial frequencies and the onewhose component has the greatest power is the 1205831 that canbe mapped to 120579134 Tensor-Based DoA Estimation In this subsection atensor factorization namely the PARAFAC decompositionis applied The PARAFAC decomposition generates threefactor matrices from a received tensor X whose structureis detailed in this subsection One factor matrix correspondsto the estimate of the steering matrix A containing DoAinformation In this subsection A is extracted from tensorXto estimate the DoA of the impinging signal
We first consider an unchanging sequence of 119873 symbolstransmitted periodically Such symbols can be found in aheader or footer or even in the payload of a message Alter-natively repeating sequences of symbols can be extractedfrom time periods when no data is being transmitted butthe carrier of the transmitter is active An example is givenas follows Since the oscillators at the transmitter and atthe receiver are never exactly the same a small frequencydeviation or constant phase change is observed at the receiverAt an MSK receiver if the deviation is positive a sequenceof ones can be extracted and if the deviation is negative asequence of zeros is observed
The symbols corresponding to the sequence from the 119894-thsource is represented by the vector c119894 isin C119873times1 Accordinglywe can build a received signal matrix
X119894 (119901) = 120574119894 (119901) a119894 (120583119894) cT119894 isin C119872times119873 (19)
where 119901 is the period corresponding to the sequence trans-mission Generalizing for 119889 signals we find
X (119901) = AD120574 (119901)CT isin C119872times119873 (20)where D120574(119901) = diag([1205741(119901) 1205742(119901) 120574119889(119901)] )T and C =[c1 c2 c119889]
For 119875 transmitted sequences the symbols can be concate-nated along the third dimension to form the received signaltensor
X = [X (1) ⊔3 X (2) ⊔3 ⊔3 X (119875)]isin C119872times119873times119875 (21)
where ⊔3 represents concatenation along the third dimen-sion Since the slices of X can be written as (20) X has aPARAFAC structure and can be decomposed into three factormatrices AC and Γ where Γ contains the diagonals ofD120574(119901)along its rows To factorize X we first rewrite it in threedifferent matrix representations or unfoldings
X(1) = A (C Γ)T (22)X(2) = C (Γ A)T (23)X(3) = Γ (A C)T (24)
where is the Khatri-Rao (column-wise Kroenecker) prod-uct
It is known that minimizing (22) (23) and (24) in theleast squares sense [62] leads to the following solutions
A =X(1) [(C Γ)T]+ (25)Γ =X(2) [(Γ A)T]+ (26)C =X(3) [(A C)T]+ (27)
We consider the well-known Alternating Least Squares(ALS) algorithm to solve (25) (26) and (27) in an iterativeway Since C is known the estimation step (27) is skippedand the ALS algorithm alternates between the estimations ofA and Γ in a two-step approach [63]
Once convergence is achieved we use A to extract theDoA of the 119894-th source as follows
120579119894 = argmax120579
aH119894 (120579) a119894 (28)
Wireless Communications and Mobile Computing 7
Table 2 Number of frames captured at each 10∘ step of the measurement campaign
DoA minus90∘ minus80∘ minus70∘ minus60∘ minus50∘ minus40∘ minus30∘ minus20∘ minus10∘ 0∘ 10∘ 20∘ 30∘ 40∘ 50∘ 60∘ 70∘ 80∘ 90∘Frames 31 29 29 30 33 34 32 29 24 30 32 24 30 33 26 31 43 41 31
Table 3 RMSE for the schemes in Table 1 without the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 23∘ 17∘ 40∘ 28∘ 17∘Variance of the RMSE 43∘ 11∘ 115∘ 41∘ 44∘
Tx Rx
Figure 6 Photo taken during the measurement campaigns of theoutdoor scenario pointing out the positions of the transmitter andof the antenna array based receiver
4 Experiments
In this section we validate our proposed drone trackingdevice with measurement campaigns in an outdoor scenarioIn Section 41 the setup for the measurement campaign isdescribed whereas in Section 42 we present the obtainedresults
41 Experimental Setup In Figure 6 we depict the outdoorscenario used for the measurement campaigns On the right-hand we placed our drone tracking device proposed inSection 3 as the receiver whereas on the left-hand thetransmitter is placed The transmitter is a 2x2 MIMO SDRplatformASPR4 [64] with frequencies ranging from 50MHzto 60 GHz a channel bandwidth varying from 200 kHz to 56MHz and a maximum power of 10 dBm at the output port
As shown in Figure 7 the distance between the transmit-ter and the receiver is 48 m Both transmitter and receiverare placed on tripods 115 cm above the ground Note that thered ldquoXrdquo in Figure 7 is the location from where the photo inFigure 6 has been taken
Both the transmitter and the receiver were set up usinga MSK message signal at 248 GHz carrier frequency and250 kbps of data rate Before starting the experiment the248 GHz frequency was scanned and no noise source wasdetected In order to verify that the receiver properly worksand measures the Bit Error Rate (BER) we have to decodethe signal To this purpose the transmitted package must beknown and consists of pseudo random sequences of length1024 bits and a header and footer with 16 bits each defined as0xFFFF and 0x0000 respectively Therefore the total size ofthe package is 1056 bits The transmitter uses both samplingfrequency and bandwidth of 2MHz At the receiver side a 4
MHz sampling frequency and 4 MHz bandwidth are usedEach captured frame at the receiver has 5120 samples
As shown in Figure 7 the transmitter is fixed and thereceiver rotates from +90∘ to minus90∘ in steps of 10∘ Accordingto Table 2 which presents the number of captured frame perDoA at each 10∘ step about 31 frames of size 5120 samples arecaptured
42 Experimental Results This subsection shows the perfor-mance of the DoA estimation schemes shown in Table 1During the measurement campaign the achieved Bit ErrorRate (BER) was 10minus4
Figure 8 shows the DoA calculated by rotating the basearray over the time Our proposed device works for a DoAranging from minus60∘ to 60∘ The DS Capon MUSIC ESPRITand Tensor combined with preprocessing schemes are shownin Figure 9(b)
In Tables 3 and 4 we present the Root Mean SquareError RMSE for the schemes in Table 1 with and without pre-processing schemes using the measurements from Figure 6respectively The equation for RMSE is given by
RMSE (1205791) = radic 1119876119876sum119902=1
(120579(119902)1 minus 120579(119902)1 )2 (29)where 119902 is one realization of a total of 119876 realizations foreach 10∘ stage of the measurement campaign In other wordsthe acquired data at each 10∘ degree step is reshaped intosmall matrices The computation of the DoA is individuallyperformed for each of these matrices In our experimentwe chose empirically matrices of size 4 times 1000 Since asshown in Table 2 at each 10∘ step 31 frames of size 5120samples are captured in average there are approximately 119876 =158matrices depending on the data reduction performed inSection 331 The variables 120579 and 120579 stand for the actual andthe estimated DoA respectively
Comparing Tables 3 and 4 we can note that except forthe Tensor the algorithms presented improvement in termsof RMSE after incorporating the preprocessing CAPON andthe Tensor increased the variance with the preprocessingThe smallest RMSE was achieved by the DS approach afterpreprocessing Note that the ESPRIT assumes the shiftinvariance property while both MUSIC and ESPRIT exploitthe property of the orthogonality between signal and noisesubspaces Note that both assumptions are approximationsand therefore their exploitation may cause additional errors
8 Wireless Communications and Mobile Computing
Table 4 RMSE for the schemes in Table 1 with the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 16∘ 17∘ 17∘ 19∘ 27∘
Variance of the RMSE 23∘ 25∘ 24∘ 18∘ 237∘
Table 5 Comparison between the obtained results and the DoA estimation in practical measurements results already available in theliterature
Drone detect solutions General DoA solutionsSolutions Proposed [25] [27] [20] [21] [22] [24] [15]DoA precision 19∘ 1∘ 1-3∘ 5∘ 1∘ 4∘ 05-2∘ 2∘Uses anechoic chamber No x x No Yes Yes Yes YesLow cost Yes No No Yes Yes Yes Yes Yes
In Table 5 we compare the DoA estimation resultsobtained with our framework and with the state-of-the-art approaches Furthermore we show that even withoutinvolving anechoic chamber in our tests precise results areobtained in comparison to references that implemented itstests in a nonreflexive environment The lsquoxrsquo means that thecommercial solutions did not provide such informationFinally we provide the information about which of thesolutions has low cost
As shown in Table 6 the total cost of the proposed dronetracking solution is US$ 2222 whereas the solutions in [25]and [27] cost US$ 226000 and US$ 120000 respectivelyTherefore our proposed off-the-shelf solution costs less than2 of the commercial solutions in [25 27]
5 Conclusions
In this paper we have proposed a low cost antenna arraybased drone tracking device for outdoor environments Theproposed solution is divided into hardware and softwareparts The hardware part of the proposed device is based onoff-the-shelf components such as an omnidirectional antennaarray a 4-channel SDR platform with carrier frequencyranging from 70MHz to 6 GHz a FPGAmotherboard and alaptop The software part includes algorithms for calibrationmodel order selection (MOS) andDoAestimation includingspecific preprocessing steps to increase the DoA accuracyWe have evaluated the performance of our proposed low costsolution in outdoor scenarios Our measurement campaignshave shown that when the array is in the front fire positionie with a DoA ranging from minus60∘ to 60∘ the maximumand the average DoA errors are 6∘ and 19∘ respectively Ourproposed off-the-shelf solution costs less than 2 of com-mercial solutions in [25 27] In order to further improve ouranalysis of the proposed system and our results experimentsin an anechoic chamber can be performed Moreover theperformance of the proposed framework can be improvedby incorporating interpolation schemes Perspectives alsoinclude the adoption of a more realistic noise model tosimplify the computation of the thresholds of the ExponentialFitting Test (EFT)
Appendix
A Proposed Extrapolation Algorithm toFind the EFT Thresholds for ExtremelyLow Probability of False Alarm
In this appendix we propose an extrapolation algorithm toestimate the thresholds of the EFT algorithm in cases that theProbability of False Alarm (Pfa) is extremely low
The EFT is based on the approximation that the profile ofthe ordered noise eigenvalues has an exponential behaviourThe profile 119886(119872119873) can be expressed as
119886 (119872119873)= radic 12 ( 151198722 + 2 minus radic 225(1198722 + 2)2 minus 180119872119873(1198722 minus 1) (1198722 + 2))
(A1)
Given that 119889 = 119872 minus 119875lowast our goal is to vary 119875 such thatwe find 119875lowast that 119872minus119875 ≪ 120582119872minus119875 where 119872minus119875 and 120582119872minus119875 standfor predicted (119872 minus 119875)th noise eigenvalue and119872 minus 119875 standsfor actual eigenvalue respectively Note that the EFT assumesthat smallest eigenvalue is a noise eigenvalue Therefore 119875varies from 1 to 119872 minus 1 Using (A1) [44] has derived thefollowing expression
119872minus119875 = (119875 + 1) sdot ( 1 minus 119886 (119875 + 1119873)1 minus 119886 (119875 + 1119873)119875+1) sdot 1205902 (A2)
1205902 = 1119875 + 1119873sum119894=0
120582119872minus119894 (A3)
where 1205902 is the estimated noise powerIn order to improve further the performance of the
EFT approach thresholds coefficients 120578119875 are computed usingnoise-only simulated data following Complex-Valued Circu-larly Symmetric Gaussian and identically and independently
Wireless Communications and Mobile Computing 9
Table 6 Price table for the hardware of the proposed drone tracker device
Hardware Cost (US$)AD-FMCOMMS5-EBZ-ND [33] 10804 times Dual-Band Antenna 24 amp 5GHz [36] 11ZYNQ 7000 Zc702 [35] 999Power Divider 24-6GHz 30Watts RoHS IP67 [41] 1095 times cable 305mm HPP100 SMA [42] 23Total 2222
Few small trees
Empty areawith sand floor
48 mTX
Met
al fe
nce
X
Several tall trees
Bushes
0∘
90∘
minus90∘
RX
Figure 7 Top view of the outdoor scenario for the measurement campaigns including the positions of the transmitter and of the antennaarray based receiver
Time (samples)0 100 200 300 400 500 600
DoA
DsCaponMusic
EspritExpectedTensor DS
minus100
100
minus80
80
minus60
60
minus40
40
minus20
20
0
Ang
les (
>A
LM
∘ )
Figure 8 Comparison between the DoA estimation schemes byvarying the DoA from +60∘ to minus60∘ with steps of 10∘
distributed (iid) as indicated in Section 2 Depending on the120578119875 we have two hypothesisH119875 1003816100381610038161003816100381610038161003816100381610038161003816
120582119872minus119875 minus 119872minus119875119872minus1198751003816100381610038161003816100381610038161003816100381610038161003816 le 120578119875 (A4)
H119875 1003816100381610038161003816100381610038161003816100381610038161003816120582119872minus119875 minus 119872minus119875119872minus119875
1003816100381610038161003816100381610038161003816100381610038161003816 gt 120578119875 (A5)
where H119875 120582119872minus119875 is a noise eigenvalue and H119875 120582119872minus119875 isa signal eigenvalue In order to have all 120578119875 depending of thePfa we can define the Pfa as
Pfa = Pr [d = 0 | d = 0] (A6)
Note that the 120578119875 thresholds are obtained by Monte Carlosimulations carried out in the only-noise scenario followingthe steps in [44] and by choosing the following amount ofrealizations
I = 10Pfa (A7)
10 Wireless Communications and Mobile Computing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(a) Without preprocessing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(b) With preprocessing
Figure 9 Comparison of the DoA estimation error between the DoA estimation schemes from Table 1 by varying the angle from minus90∘ to 90∘with steps of 10∘
Threshold
Prob
abili
ty o
f Fal
se A
larm
Linear ExtrapolationOriginal function
1 2
FIA10(pfa1)
FIA10(pfa2)
Figure 10 Log linear extrapolation based on two points given by Pfas and thresholds 120578119875Depending on the noise behaviour and the parameters
of the scenario [54 56] the thresholds can be extremelylowTherefore the computational complexity of (A7) can beprohibitive In order to overcome such limitation we proposean extrapolation approach to compute the thresholds forextremely low values of Pfa
Sincewewish to estimate values outside the known limitswe can use an extrapolation method and approximate thedescending side of the curve as a decreasing exponential Inorder to simplify the approximation we adopt a logarithmicscale as exemplified in Figure 10
Given the two known points in Figure 10 obtained byMonte Carlo simulations and given the linear extrapolation
in (A8) we can compute the two unknown constants a andb
Pfa = a sdot 120578P + b (A8)
The constants a and b are given by (A9) and (A10)by using the two known points (log10(Pfa1) 1205781) and(log10(Pfa2) 1205782)
119886 = log10 (Pfa2Pfa1)(1205782 minus 1205781) (A9)
119887 = log10 (Pfa2) minus 1205782 sdot ( log10 (Pfa2Pfa1)(1205782 minus 1205781) ) (A10)
Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

2 Wireless Communications and Mobile Computing
using a support vector machine (SVM) technique In theanechoic chamber the result of the experiments reaches 067∘estimation error No hardware details were provided
To overcome the effects of multipath propagation onthe performance of DoA estimation the authors of [16]proposed a frequency domainmultipath resolution subspace-based approach which makes RSS-based DoA estimationapplicable in multipath scenarios for small-size and low-power sensor networks This approach was verified withMonte Carlo simulations with high SNR
Aiming at the growth of connected cars systems theauthors in [17] developed a 4times4 MIMO antenna systemand proposed the DoA function for a circular phased arrayantenna Since the focus of this paper is on the methodologyand basic characteristics of DoA function no measurementor hardware information was provided
In [18] DoA estimation using an ESPAR with 12 parasiticelements and one active monopole is carried out for wirelesssensor network (WSN) applications The authors calibratedthe ESPAR array using an anechoic chamber Since thefocus of [18] is on the calibration no outdoor or indoormeasurement campaigns were performed by the authors
An improvement of ESPAR antennas is proposed in[19] The authors developed a Multiple Beam Parasitic ArrayRadiator (MBPAR) antenna that can realize six beams at thesame time without the use of diodes which increases thecommunication capacity To validate the proposed design aprototype was fabricated at 245 GHz The antenna has theefficiency from 942 to 957 over the 24G-WLAN bandsNo DoA measurements were provided
In [20] a square shaped 16 element antenna array isconnected to switches so that a four-channel SDR can selectfour antennas at each side of the square allowing a 360∘DoA estimation in outdoor environments Each side of thesquare performs a plusmn45∘ azimuth estimation According to theauthors three Yagi antennas were used as sources at specificpoints and a maximum DoA error of 5∘ is achieved Noinformation is provided about the real distance between thesources and the receive array
In [21] a four-element quasi-Yagi antenna array systemis applied for DoA estimation using the MUSIC algorithmwhereas the Minimum Description Length (MDL) criterionis used to estimate the number of dominant multipathcomponents Only two measurements were performed fortwo specific positions showing an error of 1∘ However noinformation is provided about the experimental scenario
In [22] several DoA estimation techniques are comparedconsidering a horizontal uniform linear array (ULA) with12 elements inside an anechoic chamber The measurementswere conducted varying the DoA from minus20∘ to 20∘ in steps of4∘TheDoA estimation errors were smaller than 2∘TheMin-Norm approach [12] outperformed MUSIC [23] although ithas a higher standard deviation
Finally in [24] the authors developed system using five-port reflectometers that allow simultaneously measuring theDoA and Time of Arrival (ToA) of coherent and incoherentsignals connected to seven quasi-Yagi antennas with onereflectometer for each antenna The MUSIC algorithm isapplied for the DoA estimation providing an error of 2∘ for
one source and 05∘ for two sources The measurements wereperformed in a nonreflective environment
In order to detect the presence of drones and to trackthem there is a variety of mechanical optical or antennaarray based solutions in the market For instance themechanical solution in [25] detects a drone within 3 km fortargets up to 55 cm in diameter and classifies the model of thedrone within 11 kmThe position accuracy (azimuth) in [25]is 1∘ In [26] a rechargeable portable drone tracking devicecandetect and indicate the direction of a drone in a 360∘ planeeven with weak line of sight (LoS) component The device in[26] allows the communication with other devices by usingan Application Programming Interface (API) framework Notechnical information and patent about the principles behindthe device in [26] and its DoA accuracy were provided In[27] an antenna array based system is shown to detect witha 1 km range and with 1∘ accuracy or with a 7 km range andwith 3∘ accuracy
In [28] a mobile application (app) is proposed for dronedetection According to the developers the app has anaverage range of 106 meters The system allows the detectionof almost 95 of all types of drones However the solutionin [28] does not indicate the position or the direction of thedrone
In terms of drone tracking there are recent works onreceived signal strength (RSS)-based DoA estimation Forexample [29 30] propose to estimate the DoA using arrays ofYagi-Uda directional antennas for the localization of dronesexploiting by their incoming NTSC signal in a measurementcampaign The work [29] proposes a complete hardware andsoftware framework using arrays of directional antennas andformulates a novel DoA estimation correction procedure In[30] a novel DoA estimation algorithm for the localizationof drones is validated by using an AD-FMCOMMS5-EBZsoftware defined radio (SDR) Finally [31] implemented teststo detect and locate UAVs at 900MHz The authors usedMUSIC combined with spatial smoothing and MDL Thework [30] has a similar objective to our proposal howeverthe authors did not concern in to present the accuracy of thesystem and in use of low cost equipment
In this paper we propose a low cost antenna array baseddrone tracking device for outdoor environments To the bestof our knowledge there are no state-of-the-art low costoff-the-shelf antenna array based devices applied to dronetracking The problem of drone tracking is challenging dueto the several possible modulation schemes for the datatransmission multipath propagation and the possible longoperational distances The proposed framework can alsoexploit tensor-based techniques such as the Parallel FactorAnalysis (PARAFAC) In contrast to the subspace-basedmethods the tensor-based approach shows to be robust inreal scenarios
The remainder of this paper is divided as follows InSection 2 the data model is presented Next in Section 3 wepropose a low cost antenna array based drone tracking devicefor outdoor environments including a complete descriptionof the hardware and software and the steps involved forassembling calibration and signal processing In Section 4we validate our proposed solution by means of measurement
Wireless Communications and Mobile Computing 3
campaigns in an outdoor scenario In Section 5 conclusionsare drawn
2 Data Model
We assume 119889 be far-field sources transmitting narrow-bandsignalsThese planar wavefront signals impinge over a receiveantenna array with 119872 omnidirectional elements that areuniformly and linearly disposed The space Δ between twoadjacent antennas is equal to 1205822 where 120582 is the wavelengthof the carrier signal The received signals at the antenna arraycan be written in a matrix form as follows
X = AS +N isin C119872times119873 (1)
where A isin C119872times119889 is the steering matrix and its 119894-th steeringvector is given by
a (120583119894) = [1 119890119895120583119894 1198902119895120583119894 sdot sdot sdot 119890119895(119872minus1)120583119894]T isin C119872times1 (2)
where 120583119894 is the spatial frequency that can be mapped intothe direction of arrival of the 119894-th source 120579119894 by the followingexpression 120583119894 = 2120587Δ sin 120579119894120582 S isin C119889times119873 is the symbol matrixwith N being the number of snapshots N isin C119872times119873 stands forthe noisematrix whose elements are assumed to beComplex-Valued Circularly Symmetric Gaussian and identically andindependently distributed (iid) random variables
Given (1) and assuming that the noise and the signal areuncorrelated the covariance matrix can be computed by
RXX = E xxH = ARSSAH + RNN (3)
where x is one column vector from X (sdot)H is the Hermitianoperator and 119864sdot is the expected value operator In practicethe sample covariance matrix is calculated as follows
RXX = XXH
119873 isin C119872times119872 (4)
The DoA techniques used along this paper exploit thesample covariance matrix in (4) As shown in Section 3the matrix X is preprocessed before we compute the samplecovariance matrix RXX
The goal of our proposed drone tracking device is to esti-mate the direction of arrival (DoA) 1205791 of the line of sight (LoS)component from a drone in an outdoor scenario We assumethat there is no obstruction of the LoS component Thereforethe LoS component is assumed to have the greatest power incomparison with the non-LoS components Mathematicallywe can express it as1003817100381710038171003817a (1205831) s (1205831)1003817100381710038171003817F gt 1003817100381710038171003817a (120583119894) s (120583119894)1003817100381710038171003817F (5)
for 119894 = 2 119889 The operator sdot F stands for the Frobeniusnorm
3 Proposed Low Cost Antenna Array BasedDrone Tracking Device
In this section we detail the proposed low cost antenna arraybased drone tracking device In Section 31 we describe the
To PC
uProc amp FPGAMotherboard
SDRDaughterboard
Power Divider
TX
RX
Figure 1 Assembled components for the hardware calibrationof four receive channels The components are a microprocessor(uProc) a FPGA motherboard a SDR a power divider and cables
steps for the hardware calibration The calibration ensuresphase alignment for all the four channels of the SDRallowing the DoA estimation In Section 32 we present theassembling of the hardware components of the proposeddrone tracking device In Section 33 we propose a signalprocessing framework for DoA estimation
31 Hardware Assembling for the Calibration In order toperform the measurements the SDR should be calibratedsuch that all the receive channels become in phaseThe phaseimbalance may be caused by different time initialization ofthe oscillators and by hardware imperfections The hardwarevendor provides a software [32] for clock calibration of thelocal oscillator However this software does not performphase calibration
Therefore in order to perform the phase calibrationthe hardware components are first assembled according toFigure 1 Note that the SDR transmits the signal from onechannel and receives it in four channels that should becalibrated
As shown in Figure 1 the SDR is a 4times4 MIMO plat-form named ADFMCOMMS5 [33] with two AD9361 [34]Integrated Circuits (ICs) that contain 2 transmitters and tworeceivers each ranging from 70 MHz to 60 GHz and havea channel bandwidth ranging from 200 kHz to 56 MHzThe platform is connected to a microprocessor and a FPGAmotherboard [35] that configures the SDR and transmits theSDR data to the PC As shown in Figure 1 the cables forcalibration should have the same length Moreover a powerdivision component is included in order to lead the signal tothe four receive channels at the same time and to reduce thepower of the transmitted signal to avoid damaging
To compensate the phase errors previously explained thefirst step is to extract the phase of the elements of the matrixX The phase 120601(119898 119894) is defined as follows
120601 (119898 119894) = ang119909 (119898 119894) = arctan ( Im 119909 (119898 119894)Re 119909 (119898 119894) ) (6)
where 119909(119898 119894) is the element in position 119898 119894 of the measuredmatrixXThe operators ang Imsdot and Resdot stand for the phaseoperator the imaginary part of a complex number and thereal part of a complex number respectively
4 Wireless Communications and Mobile Computing
RX A1 RX A2 RX A3 RX A4
Figure 2 Proposed low cost antenna array based drone trackingdevice with 4 element ULA and a 4 times 4 MIMO SDR
Since each channel is related to each line of the matrix Xin order to compute the phase shift between two channels wecompute the phase difference of two consecutive antennas
120596 (119898 ) = Φ (119898 ) minusΦ (119903 ) isin C1times119873 (7)
where Φ stands for the matrix containing the calculatedphases by (6) 119903 indicates the reference channel and119898 variesfrom 1 toMThis reference channel can be randomly selectedfrom 1 to 119872 and is the input of the SDR that is used as areference to compensate the phase imbalance from the otherinputs Since the vector 120596(119898 ) is the119898-th row ofmatrixΩ incase119898 = 119894 the 119894-th row ofΩ is filled with zeros Finally sincethe phase difference may slightly vary for different samples inthe same row of Ω due to the thermal noise we compute thearithmetic mean of the elements of each row of Ω obtainingthe vector 120596 isin C119872times1 and its119898-th element is given by
120596 (119898) = 1119873119873sum119899=1
Ω (119898 119899) (8)
Hence in order to compensate the phase shift betweentwo different channels we compute the vector c isin C119872times1 The119898-th element is given by
c (119898) = eminus119895120596(119898) (9)
Note that the compensation vector c is computed only oncefor the system initialization The calibrated outputs of theantenna array are given by the following expression
Xc = diag cX (10)
where the operator diagsdot transforms its argument vectorinto the main diagonal of a diagonal matrix
32 Hardware Assembling for the Drone Tracking Measure-ment Campaign After the hardware has been calibratedthe next step is to assembly it in order to perform themeasurements
The four-element omnidirectional antenna array is con-nected to the calibrated hardware composed of the FPGAmotherboard and SDR daughterboard according to Figure 2Each antenna is dual band (from 2400MHz to 24835MHz
and from 4900 MHz to 5875 MHz ) [36] and has linearpolarization with 37 dBi of gain The space Δ between twoconsecutive antennas is equal to 599 cm The operationalfrequency119891 = 25GHz is themaximum frequency that avoidsaliasing
33 Framework for DoA Estimation Here we first propose asample selection approach for DoA estimation by automaticphase deviation detection Then we formulate a DoA esti-mation framework exploiting preprocessing techniques andmodel order selection schemes
Figure 3 depicts the flowchart of the proposed signalprocessing solution for DoA estimation
As shown in Box 2 of the Figure 3 the phase deviationcorrection proposed in Section 31 returns a matrix Xc that isused in the sample selection scheme in Section 331
331 Sample Selection for DoA Estimation by AutomaticPhase Deviation Detection As exemplified Xc in Figure 4empirically we observed that the hardware causes phasedeviations on the samples in random time instantsThereforewe propose an approach to select the samples with phasedeviations for the DoA estimation
Note that the phase compensation proposed in Section 31has been applied to the samples whose matrix Φ containingthe phases are depicted in Figure 4 Furthermore note thatthere are significant deviations that can degrade the DoAestimation process The main objective here is to removethese phase deviations
As shown in Figure 5 such ripples can be better visualizedby computing the phase difference in the time dimensionaccording to the following expression
120574 (119898 119894) = (120601 (119898 119894 + 1) minus 120601 (119898 119894))2 (11)
where 120574(119898 119894) is the value containing the quadratic differenceof two consecutive time samples 119894 and 119894 + 1 of the 119898-thchannelThe120601(119898 119894) from (6) is the element in position (119898 119894)of the matrix Φ
Figure 5 draws the Γ that contains the result of (11) Bydetecting the peaks we can identify which samples shouldbe removed For this task we apply the approach proposedin [37] which returns the green curve with the value of thethresholdTherefore the samples whose phase differences aregreater than the threshold are removed The result after thesamples removed is presented in the following equation
Xcs = [Xc ( 1 1198731) | Xc ( 1198732 1198733) | sdot sdot sdot |Xc ( 119873119879minus1 119873119879)] (12)
where Xcs is the matrix with the selected samples Note that119873119879 = 119873 and the values of N119905 for 119905 = 1 119879 are found bycomparing the phase difference values with the threshold inFigure 5
332 DoA Estimation Framework According to Figure 3the matrix Xcs given in (12) is used to improve the DoAestimation with preprocessing schemes There are several
Wireless Communications and Mobile Computing 5
Phase DeviationCorrection
(Section 31)2 3 4
5
1
6
Xc Xcs
Xcs XcsX Z
Sample Selectionvia [25]
Optional Pre-Processing
(Section 332)
Direction of ArrivalEstimation(Table 1)
Model OrderSelection
(Section 332)
Capturateddata X
d 1
Figure 3 Flowchart of the proposed solution for DoA estimation
Samples (time)
Phas
e (deg)
0
2
4
6
8
10
12
14
Antenna 1 Antenna 2
Antenna 3 Antenna 4
0 1 286
88
9
92times104
times104
times105
times1060 05 1 15 2 25 353 4 45
Figure 4 Phase of the received data in each antenna An exampleof phase deviation region is highlighted in the zoom area
Samples (time)
Der
ivat
ive o
f pha
se (r
ad)
0
05
1
15
2
25
3
Antenna1Antenna2Antenna3
Antenna4Threshold via [24]
32 33 34 35 36 37 38 39times106
Figure 5 Difference between consecutive samples from Figure 4
DoA estimation schemes in the literature such as beamform-ing approaches and subspace-based approaches Examplesof beamforming are Delay and Sum [38] and Capon [39]whereas examples of classical subspace-based approaches areMUSIC [23] and ESPRIT [40]
The DoA estimation schemes assume that the modelorder 119889 is known In practice model order selection tech-niques should be applied to estimate the model order 119889 asdepicted in Figure 3
In the flowchart of Figure 3 we adopted the ExponentialFitting Test (EFT) [43 44] as the model order selectionscheme The EFT has the deflation property that allows usto find suitable thresholds as a function of the Probabilityof False Alarm (Pfa) By exploiting the deflation propertyand by finding suitable thresholds the EFT has been theonly scheme in the literature to estimate 119889 = 1 in thepresence of a strong LoS signal and 119889 = 0 in the onlynoise (no signal) measurements We have compared severalschemes in the literature such as Akaike Information Crite-rion (AIC) [45] Efficient Detection Criterion (EDC) [46]Minimum Description Length (MDL) [47] Steinrsquos unbiasedrisk estimate (SURE) [48] RADOI [49] ESTimation ERror(ESTER) [50] and Subspace-based Automatic Model OrderSelection (SAMOS) [51] The M-EFT [43 44 52] has alsobeen suitable but an even smaller Pfa was required tofind the thresholds The computation of the thresholds ofthe EFT requires an extremely low Pfa The complexity ofsuch a computation is prohibitive Therefore we propose inAppendix A an extrapolation algorithm to compute suchthresholds Note that our proposed extrapolation algorithmhas been applied in [53ndash56] although no details are providedThe reason for extremely low Pfa may be related to thenoise behaviour as shown in Appendix B Note that theIlmenau Package for Model Order Selection (IPM) [57]with MATLAB and Java implementation of the model orderselection schemes can be found at the LASP homepage(httpslaspunbbrindexphppublicationssoftwares)
In order to further improve the accuracy of DoA esti-mation schemes preprocessing schemes can be appliedbeforehand We consider in this work the VandermondeInvariation Technique (VIT) [58] Spatial smoothing (SPS)[59] and Forward Backward Averaging (FBA) [60 61] asa preprocessing schemes As depicted in Figure 3 after the
6 Wireless Communications and Mobile Computing
Table 1 Selected state-of-the-art DoA estimation schemes
Delay And Sum [38] 119875DS (120579) = w (120579)H Rxxw (120579)w (120579)H w (120579) (13)
Capon [39] 119875CAP(120579) = 1w (120579)H Rminus1xxw (120579) (14)
MUSIC [23] 119875M119880119878119868119862(120579) = 1wH (120579)VnVH
nw (120579) (15)ESPRIT [40]
Ψ = J1U+s J2Us (16)Ψ
EVD= EΦEH with Φ = diag [1206011 120601119889] (17)120583119894 = ang(120601119894) 119894 = 1 119889 (18)preprocessing step a matrix Z is returned and used by theDoA methods summarized in Table 1
In Table 1 the vector w(120579) in (13) (14) and (15) varyaccording to the candidate values of 120579 The value of 120579 thatmaximizes the expression in (13) (14) and (15) is the 1205791since in Section 2 the data model assumes that the LoScomponent faces no obstacles Therefore the componentcorresponding to the greatest power should be the samecomponent with DoA equal to 1205791 Us isin C119872times119889 is signalsubspace which is equal to the 119889 eigenvectors correspondingto the 119889 greatest eigenvalues whereasVn isin C119872times119872minus119889 is a basisfor the noise subspace composed by the119872minus 119889 eigenvectorsassociated with to the 119872 minus 119889 smallest eigenvalues In (17)and (18) Φ is the diagonal matrix that has the eigenvaluesof Ψ We compute all the spatial frequencies and the onewhose component has the greatest power is the 1205831 that canbe mapped to 120579134 Tensor-Based DoA Estimation In this subsection atensor factorization namely the PARAFAC decompositionis applied The PARAFAC decomposition generates threefactor matrices from a received tensor X whose structureis detailed in this subsection One factor matrix correspondsto the estimate of the steering matrix A containing DoAinformation In this subsection A is extracted from tensorXto estimate the DoA of the impinging signal
We first consider an unchanging sequence of 119873 symbolstransmitted periodically Such symbols can be found in aheader or footer or even in the payload of a message Alter-natively repeating sequences of symbols can be extractedfrom time periods when no data is being transmitted butthe carrier of the transmitter is active An example is givenas follows Since the oscillators at the transmitter and atthe receiver are never exactly the same a small frequencydeviation or constant phase change is observed at the receiverAt an MSK receiver if the deviation is positive a sequenceof ones can be extracted and if the deviation is negative asequence of zeros is observed
The symbols corresponding to the sequence from the 119894-thsource is represented by the vector c119894 isin C119873times1 Accordinglywe can build a received signal matrix
X119894 (119901) = 120574119894 (119901) a119894 (120583119894) cT119894 isin C119872times119873 (19)
where 119901 is the period corresponding to the sequence trans-mission Generalizing for 119889 signals we find
X (119901) = AD120574 (119901)CT isin C119872times119873 (20)where D120574(119901) = diag([1205741(119901) 1205742(119901) 120574119889(119901)] )T and C =[c1 c2 c119889]
For 119875 transmitted sequences the symbols can be concate-nated along the third dimension to form the received signaltensor
X = [X (1) ⊔3 X (2) ⊔3 ⊔3 X (119875)]isin C119872times119873times119875 (21)
where ⊔3 represents concatenation along the third dimen-sion Since the slices of X can be written as (20) X has aPARAFAC structure and can be decomposed into three factormatrices AC and Γ where Γ contains the diagonals ofD120574(119901)along its rows To factorize X we first rewrite it in threedifferent matrix representations or unfoldings
X(1) = A (C Γ)T (22)X(2) = C (Γ A)T (23)X(3) = Γ (A C)T (24)
where is the Khatri-Rao (column-wise Kroenecker) prod-uct
It is known that minimizing (22) (23) and (24) in theleast squares sense [62] leads to the following solutions
A =X(1) [(C Γ)T]+ (25)Γ =X(2) [(Γ A)T]+ (26)C =X(3) [(A C)T]+ (27)
We consider the well-known Alternating Least Squares(ALS) algorithm to solve (25) (26) and (27) in an iterativeway Since C is known the estimation step (27) is skippedand the ALS algorithm alternates between the estimations ofA and Γ in a two-step approach [63]
Once convergence is achieved we use A to extract theDoA of the 119894-th source as follows
120579119894 = argmax120579
aH119894 (120579) a119894 (28)
Wireless Communications and Mobile Computing 7
Table 2 Number of frames captured at each 10∘ step of the measurement campaign
DoA minus90∘ minus80∘ minus70∘ minus60∘ minus50∘ minus40∘ minus30∘ minus20∘ minus10∘ 0∘ 10∘ 20∘ 30∘ 40∘ 50∘ 60∘ 70∘ 80∘ 90∘Frames 31 29 29 30 33 34 32 29 24 30 32 24 30 33 26 31 43 41 31
Table 3 RMSE for the schemes in Table 1 without the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 23∘ 17∘ 40∘ 28∘ 17∘Variance of the RMSE 43∘ 11∘ 115∘ 41∘ 44∘
Tx Rx
Figure 6 Photo taken during the measurement campaigns of theoutdoor scenario pointing out the positions of the transmitter andof the antenna array based receiver
4 Experiments
In this section we validate our proposed drone trackingdevice with measurement campaigns in an outdoor scenarioIn Section 41 the setup for the measurement campaign isdescribed whereas in Section 42 we present the obtainedresults
41 Experimental Setup In Figure 6 we depict the outdoorscenario used for the measurement campaigns On the right-hand we placed our drone tracking device proposed inSection 3 as the receiver whereas on the left-hand thetransmitter is placed The transmitter is a 2x2 MIMO SDRplatformASPR4 [64] with frequencies ranging from 50MHzto 60 GHz a channel bandwidth varying from 200 kHz to 56MHz and a maximum power of 10 dBm at the output port
As shown in Figure 7 the distance between the transmit-ter and the receiver is 48 m Both transmitter and receiverare placed on tripods 115 cm above the ground Note that thered ldquoXrdquo in Figure 7 is the location from where the photo inFigure 6 has been taken
Both the transmitter and the receiver were set up usinga MSK message signal at 248 GHz carrier frequency and250 kbps of data rate Before starting the experiment the248 GHz frequency was scanned and no noise source wasdetected In order to verify that the receiver properly worksand measures the Bit Error Rate (BER) we have to decodethe signal To this purpose the transmitted package must beknown and consists of pseudo random sequences of length1024 bits and a header and footer with 16 bits each defined as0xFFFF and 0x0000 respectively Therefore the total size ofthe package is 1056 bits The transmitter uses both samplingfrequency and bandwidth of 2MHz At the receiver side a 4
MHz sampling frequency and 4 MHz bandwidth are usedEach captured frame at the receiver has 5120 samples
As shown in Figure 7 the transmitter is fixed and thereceiver rotates from +90∘ to minus90∘ in steps of 10∘ Accordingto Table 2 which presents the number of captured frame perDoA at each 10∘ step about 31 frames of size 5120 samples arecaptured
42 Experimental Results This subsection shows the perfor-mance of the DoA estimation schemes shown in Table 1During the measurement campaign the achieved Bit ErrorRate (BER) was 10minus4
Figure 8 shows the DoA calculated by rotating the basearray over the time Our proposed device works for a DoAranging from minus60∘ to 60∘ The DS Capon MUSIC ESPRITand Tensor combined with preprocessing schemes are shownin Figure 9(b)
In Tables 3 and 4 we present the Root Mean SquareError RMSE for the schemes in Table 1 with and without pre-processing schemes using the measurements from Figure 6respectively The equation for RMSE is given by
RMSE (1205791) = radic 1119876119876sum119902=1
(120579(119902)1 minus 120579(119902)1 )2 (29)where 119902 is one realization of a total of 119876 realizations foreach 10∘ stage of the measurement campaign In other wordsthe acquired data at each 10∘ degree step is reshaped intosmall matrices The computation of the DoA is individuallyperformed for each of these matrices In our experimentwe chose empirically matrices of size 4 times 1000 Since asshown in Table 2 at each 10∘ step 31 frames of size 5120samples are captured in average there are approximately 119876 =158matrices depending on the data reduction performed inSection 331 The variables 120579 and 120579 stand for the actual andthe estimated DoA respectively
Comparing Tables 3 and 4 we can note that except forthe Tensor the algorithms presented improvement in termsof RMSE after incorporating the preprocessing CAPON andthe Tensor increased the variance with the preprocessingThe smallest RMSE was achieved by the DS approach afterpreprocessing Note that the ESPRIT assumes the shiftinvariance property while both MUSIC and ESPRIT exploitthe property of the orthogonality between signal and noisesubspaces Note that both assumptions are approximationsand therefore their exploitation may cause additional errors
8 Wireless Communications and Mobile Computing
Table 4 RMSE for the schemes in Table 1 with the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 16∘ 17∘ 17∘ 19∘ 27∘
Variance of the RMSE 23∘ 25∘ 24∘ 18∘ 237∘
Table 5 Comparison between the obtained results and the DoA estimation in practical measurements results already available in theliterature
Drone detect solutions General DoA solutionsSolutions Proposed [25] [27] [20] [21] [22] [24] [15]DoA precision 19∘ 1∘ 1-3∘ 5∘ 1∘ 4∘ 05-2∘ 2∘Uses anechoic chamber No x x No Yes Yes Yes YesLow cost Yes No No Yes Yes Yes Yes Yes
In Table 5 we compare the DoA estimation resultsobtained with our framework and with the state-of-the-art approaches Furthermore we show that even withoutinvolving anechoic chamber in our tests precise results areobtained in comparison to references that implemented itstests in a nonreflexive environment The lsquoxrsquo means that thecommercial solutions did not provide such informationFinally we provide the information about which of thesolutions has low cost
As shown in Table 6 the total cost of the proposed dronetracking solution is US$ 2222 whereas the solutions in [25]and [27] cost US$ 226000 and US$ 120000 respectivelyTherefore our proposed off-the-shelf solution costs less than2 of the commercial solutions in [25 27]
5 Conclusions
In this paper we have proposed a low cost antenna arraybased drone tracking device for outdoor environments Theproposed solution is divided into hardware and softwareparts The hardware part of the proposed device is based onoff-the-shelf components such as an omnidirectional antennaarray a 4-channel SDR platform with carrier frequencyranging from 70MHz to 6 GHz a FPGAmotherboard and alaptop The software part includes algorithms for calibrationmodel order selection (MOS) andDoAestimation includingspecific preprocessing steps to increase the DoA accuracyWe have evaluated the performance of our proposed low costsolution in outdoor scenarios Our measurement campaignshave shown that when the array is in the front fire positionie with a DoA ranging from minus60∘ to 60∘ the maximumand the average DoA errors are 6∘ and 19∘ respectively Ourproposed off-the-shelf solution costs less than 2 of com-mercial solutions in [25 27] In order to further improve ouranalysis of the proposed system and our results experimentsin an anechoic chamber can be performed Moreover theperformance of the proposed framework can be improvedby incorporating interpolation schemes Perspectives alsoinclude the adoption of a more realistic noise model tosimplify the computation of the thresholds of the ExponentialFitting Test (EFT)
Appendix
A Proposed Extrapolation Algorithm toFind the EFT Thresholds for ExtremelyLow Probability of False Alarm
In this appendix we propose an extrapolation algorithm toestimate the thresholds of the EFT algorithm in cases that theProbability of False Alarm (Pfa) is extremely low
The EFT is based on the approximation that the profile ofthe ordered noise eigenvalues has an exponential behaviourThe profile 119886(119872119873) can be expressed as
119886 (119872119873)= radic 12 ( 151198722 + 2 minus radic 225(1198722 + 2)2 minus 180119872119873(1198722 minus 1) (1198722 + 2))
(A1)
Given that 119889 = 119872 minus 119875lowast our goal is to vary 119875 such thatwe find 119875lowast that 119872minus119875 ≪ 120582119872minus119875 where 119872minus119875 and 120582119872minus119875 standfor predicted (119872 minus 119875)th noise eigenvalue and119872 minus 119875 standsfor actual eigenvalue respectively Note that the EFT assumesthat smallest eigenvalue is a noise eigenvalue Therefore 119875varies from 1 to 119872 minus 1 Using (A1) [44] has derived thefollowing expression
119872minus119875 = (119875 + 1) sdot ( 1 minus 119886 (119875 + 1119873)1 minus 119886 (119875 + 1119873)119875+1) sdot 1205902 (A2)
1205902 = 1119875 + 1119873sum119894=0
120582119872minus119894 (A3)
where 1205902 is the estimated noise powerIn order to improve further the performance of the
EFT approach thresholds coefficients 120578119875 are computed usingnoise-only simulated data following Complex-Valued Circu-larly Symmetric Gaussian and identically and independently
Wireless Communications and Mobile Computing 9
Table 6 Price table for the hardware of the proposed drone tracker device
Hardware Cost (US$)AD-FMCOMMS5-EBZ-ND [33] 10804 times Dual-Band Antenna 24 amp 5GHz [36] 11ZYNQ 7000 Zc702 [35] 999Power Divider 24-6GHz 30Watts RoHS IP67 [41] 1095 times cable 305mm HPP100 SMA [42] 23Total 2222
Few small trees
Empty areawith sand floor
48 mTX
Met
al fe
nce
X
Several tall trees
Bushes
0∘
90∘
minus90∘
RX
Figure 7 Top view of the outdoor scenario for the measurement campaigns including the positions of the transmitter and of the antennaarray based receiver
Time (samples)0 100 200 300 400 500 600
DoA
DsCaponMusic
EspritExpectedTensor DS
minus100
100
minus80
80
minus60
60
minus40
40
minus20
20
0
Ang
les (
>A
LM
∘ )
Figure 8 Comparison between the DoA estimation schemes byvarying the DoA from +60∘ to minus60∘ with steps of 10∘
distributed (iid) as indicated in Section 2 Depending on the120578119875 we have two hypothesisH119875 1003816100381610038161003816100381610038161003816100381610038161003816
120582119872minus119875 minus 119872minus119875119872minus1198751003816100381610038161003816100381610038161003816100381610038161003816 le 120578119875 (A4)
H119875 1003816100381610038161003816100381610038161003816100381610038161003816120582119872minus119875 minus 119872minus119875119872minus119875
1003816100381610038161003816100381610038161003816100381610038161003816 gt 120578119875 (A5)
where H119875 120582119872minus119875 is a noise eigenvalue and H119875 120582119872minus119875 isa signal eigenvalue In order to have all 120578119875 depending of thePfa we can define the Pfa as
Pfa = Pr [d = 0 | d = 0] (A6)
Note that the 120578119875 thresholds are obtained by Monte Carlosimulations carried out in the only-noise scenario followingthe steps in [44] and by choosing the following amount ofrealizations
I = 10Pfa (A7)
10 Wireless Communications and Mobile Computing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(a) Without preprocessing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(b) With preprocessing
Figure 9 Comparison of the DoA estimation error between the DoA estimation schemes from Table 1 by varying the angle from minus90∘ to 90∘with steps of 10∘
Threshold
Prob
abili
ty o
f Fal
se A
larm
Linear ExtrapolationOriginal function
1 2
FIA10(pfa1)
FIA10(pfa2)
Figure 10 Log linear extrapolation based on two points given by Pfas and thresholds 120578119875Depending on the noise behaviour and the parameters
of the scenario [54 56] the thresholds can be extremelylowTherefore the computational complexity of (A7) can beprohibitive In order to overcome such limitation we proposean extrapolation approach to compute the thresholds forextremely low values of Pfa
Sincewewish to estimate values outside the known limitswe can use an extrapolation method and approximate thedescending side of the curve as a decreasing exponential Inorder to simplify the approximation we adopt a logarithmicscale as exemplified in Figure 10
Given the two known points in Figure 10 obtained byMonte Carlo simulations and given the linear extrapolation
in (A8) we can compute the two unknown constants a andb
Pfa = a sdot 120578P + b (A8)
The constants a and b are given by (A9) and (A10)by using the two known points (log10(Pfa1) 1205781) and(log10(Pfa2) 1205782)
119886 = log10 (Pfa2Pfa1)(1205782 minus 1205781) (A9)
119887 = log10 (Pfa2) minus 1205782 sdot ( log10 (Pfa2Pfa1)(1205782 minus 1205781) ) (A10)
Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Wireless Communications and Mobile Computing 3
campaigns in an outdoor scenario In Section 5 conclusionsare drawn
2 Data Model
We assume 119889 be far-field sources transmitting narrow-bandsignalsThese planar wavefront signals impinge over a receiveantenna array with 119872 omnidirectional elements that areuniformly and linearly disposed The space Δ between twoadjacent antennas is equal to 1205822 where 120582 is the wavelengthof the carrier signal The received signals at the antenna arraycan be written in a matrix form as follows
X = AS +N isin C119872times119873 (1)
where A isin C119872times119889 is the steering matrix and its 119894-th steeringvector is given by
a (120583119894) = [1 119890119895120583119894 1198902119895120583119894 sdot sdot sdot 119890119895(119872minus1)120583119894]T isin C119872times1 (2)
where 120583119894 is the spatial frequency that can be mapped intothe direction of arrival of the 119894-th source 120579119894 by the followingexpression 120583119894 = 2120587Δ sin 120579119894120582 S isin C119889times119873 is the symbol matrixwith N being the number of snapshots N isin C119872times119873 stands forthe noisematrix whose elements are assumed to beComplex-Valued Circularly Symmetric Gaussian and identically andindependently distributed (iid) random variables
Given (1) and assuming that the noise and the signal areuncorrelated the covariance matrix can be computed by
RXX = E xxH = ARSSAH + RNN (3)
where x is one column vector from X (sdot)H is the Hermitianoperator and 119864sdot is the expected value operator In practicethe sample covariance matrix is calculated as follows
RXX = XXH
119873 isin C119872times119872 (4)
The DoA techniques used along this paper exploit thesample covariance matrix in (4) As shown in Section 3the matrix X is preprocessed before we compute the samplecovariance matrix RXX
The goal of our proposed drone tracking device is to esti-mate the direction of arrival (DoA) 1205791 of the line of sight (LoS)component from a drone in an outdoor scenario We assumethat there is no obstruction of the LoS component Thereforethe LoS component is assumed to have the greatest power incomparison with the non-LoS components Mathematicallywe can express it as1003817100381710038171003817a (1205831) s (1205831)1003817100381710038171003817F gt 1003817100381710038171003817a (120583119894) s (120583119894)1003817100381710038171003817F (5)
for 119894 = 2 119889 The operator sdot F stands for the Frobeniusnorm
3 Proposed Low Cost Antenna Array BasedDrone Tracking Device
In this section we detail the proposed low cost antenna arraybased drone tracking device In Section 31 we describe the
To PC
uProc amp FPGAMotherboard
SDRDaughterboard
Power Divider
TX
RX
Figure 1 Assembled components for the hardware calibrationof four receive channels The components are a microprocessor(uProc) a FPGA motherboard a SDR a power divider and cables
steps for the hardware calibration The calibration ensuresphase alignment for all the four channels of the SDRallowing the DoA estimation In Section 32 we present theassembling of the hardware components of the proposeddrone tracking device In Section 33 we propose a signalprocessing framework for DoA estimation
31 Hardware Assembling for the Calibration In order toperform the measurements the SDR should be calibratedsuch that all the receive channels become in phaseThe phaseimbalance may be caused by different time initialization ofthe oscillators and by hardware imperfections The hardwarevendor provides a software [32] for clock calibration of thelocal oscillator However this software does not performphase calibration
Therefore in order to perform the phase calibrationthe hardware components are first assembled according toFigure 1 Note that the SDR transmits the signal from onechannel and receives it in four channels that should becalibrated
As shown in Figure 1 the SDR is a 4times4 MIMO plat-form named ADFMCOMMS5 [33] with two AD9361 [34]Integrated Circuits (ICs) that contain 2 transmitters and tworeceivers each ranging from 70 MHz to 60 GHz and havea channel bandwidth ranging from 200 kHz to 56 MHzThe platform is connected to a microprocessor and a FPGAmotherboard [35] that configures the SDR and transmits theSDR data to the PC As shown in Figure 1 the cables forcalibration should have the same length Moreover a powerdivision component is included in order to lead the signal tothe four receive channels at the same time and to reduce thepower of the transmitted signal to avoid damaging
To compensate the phase errors previously explained thefirst step is to extract the phase of the elements of the matrixX The phase 120601(119898 119894) is defined as follows
120601 (119898 119894) = ang119909 (119898 119894) = arctan ( Im 119909 (119898 119894)Re 119909 (119898 119894) ) (6)
where 119909(119898 119894) is the element in position 119898 119894 of the measuredmatrixXThe operators ang Imsdot and Resdot stand for the phaseoperator the imaginary part of a complex number and thereal part of a complex number respectively
4 Wireless Communications and Mobile Computing
RX A1 RX A2 RX A3 RX A4
Figure 2 Proposed low cost antenna array based drone trackingdevice with 4 element ULA and a 4 times 4 MIMO SDR
Since each channel is related to each line of the matrix Xin order to compute the phase shift between two channels wecompute the phase difference of two consecutive antennas
120596 (119898 ) = Φ (119898 ) minusΦ (119903 ) isin C1times119873 (7)
where Φ stands for the matrix containing the calculatedphases by (6) 119903 indicates the reference channel and119898 variesfrom 1 toMThis reference channel can be randomly selectedfrom 1 to 119872 and is the input of the SDR that is used as areference to compensate the phase imbalance from the otherinputs Since the vector 120596(119898 ) is the119898-th row ofmatrixΩ incase119898 = 119894 the 119894-th row ofΩ is filled with zeros Finally sincethe phase difference may slightly vary for different samples inthe same row of Ω due to the thermal noise we compute thearithmetic mean of the elements of each row of Ω obtainingthe vector 120596 isin C119872times1 and its119898-th element is given by
120596 (119898) = 1119873119873sum119899=1
Ω (119898 119899) (8)
Hence in order to compensate the phase shift betweentwo different channels we compute the vector c isin C119872times1 The119898-th element is given by
c (119898) = eminus119895120596(119898) (9)
Note that the compensation vector c is computed only oncefor the system initialization The calibrated outputs of theantenna array are given by the following expression
Xc = diag cX (10)
where the operator diagsdot transforms its argument vectorinto the main diagonal of a diagonal matrix
32 Hardware Assembling for the Drone Tracking Measure-ment Campaign After the hardware has been calibratedthe next step is to assembly it in order to perform themeasurements
The four-element omnidirectional antenna array is con-nected to the calibrated hardware composed of the FPGAmotherboard and SDR daughterboard according to Figure 2Each antenna is dual band (from 2400MHz to 24835MHz
and from 4900 MHz to 5875 MHz ) [36] and has linearpolarization with 37 dBi of gain The space Δ between twoconsecutive antennas is equal to 599 cm The operationalfrequency119891 = 25GHz is themaximum frequency that avoidsaliasing
33 Framework for DoA Estimation Here we first propose asample selection approach for DoA estimation by automaticphase deviation detection Then we formulate a DoA esti-mation framework exploiting preprocessing techniques andmodel order selection schemes
Figure 3 depicts the flowchart of the proposed signalprocessing solution for DoA estimation
As shown in Box 2 of the Figure 3 the phase deviationcorrection proposed in Section 31 returns a matrix Xc that isused in the sample selection scheme in Section 331
331 Sample Selection for DoA Estimation by AutomaticPhase Deviation Detection As exemplified Xc in Figure 4empirically we observed that the hardware causes phasedeviations on the samples in random time instantsThereforewe propose an approach to select the samples with phasedeviations for the DoA estimation
Note that the phase compensation proposed in Section 31has been applied to the samples whose matrix Φ containingthe phases are depicted in Figure 4 Furthermore note thatthere are significant deviations that can degrade the DoAestimation process The main objective here is to removethese phase deviations
As shown in Figure 5 such ripples can be better visualizedby computing the phase difference in the time dimensionaccording to the following expression
120574 (119898 119894) = (120601 (119898 119894 + 1) minus 120601 (119898 119894))2 (11)
where 120574(119898 119894) is the value containing the quadratic differenceof two consecutive time samples 119894 and 119894 + 1 of the 119898-thchannelThe120601(119898 119894) from (6) is the element in position (119898 119894)of the matrix Φ
Figure 5 draws the Γ that contains the result of (11) Bydetecting the peaks we can identify which samples shouldbe removed For this task we apply the approach proposedin [37] which returns the green curve with the value of thethresholdTherefore the samples whose phase differences aregreater than the threshold are removed The result after thesamples removed is presented in the following equation
Xcs = [Xc ( 1 1198731) | Xc ( 1198732 1198733) | sdot sdot sdot |Xc ( 119873119879minus1 119873119879)] (12)
where Xcs is the matrix with the selected samples Note that119873119879 = 119873 and the values of N119905 for 119905 = 1 119879 are found bycomparing the phase difference values with the threshold inFigure 5
332 DoA Estimation Framework According to Figure 3the matrix Xcs given in (12) is used to improve the DoAestimation with preprocessing schemes There are several
Wireless Communications and Mobile Computing 5
Phase DeviationCorrection
(Section 31)2 3 4
5
1
6
Xc Xcs
Xcs XcsX Z
Sample Selectionvia [25]
Optional Pre-Processing
(Section 332)
Direction of ArrivalEstimation(Table 1)
Model OrderSelection
(Section 332)
Capturateddata X
d 1
Figure 3 Flowchart of the proposed solution for DoA estimation
Samples (time)
Phas
e (deg)
0
2
4
6
8
10
12
14
Antenna 1 Antenna 2
Antenna 3 Antenna 4
0 1 286
88
9
92times104
times104
times105
times1060 05 1 15 2 25 353 4 45
Figure 4 Phase of the received data in each antenna An exampleof phase deviation region is highlighted in the zoom area
Samples (time)
Der
ivat
ive o
f pha
se (r
ad)
0
05
1
15
2
25
3
Antenna1Antenna2Antenna3
Antenna4Threshold via [24]
32 33 34 35 36 37 38 39times106
Figure 5 Difference between consecutive samples from Figure 4
DoA estimation schemes in the literature such as beamform-ing approaches and subspace-based approaches Examplesof beamforming are Delay and Sum [38] and Capon [39]whereas examples of classical subspace-based approaches areMUSIC [23] and ESPRIT [40]
The DoA estimation schemes assume that the modelorder 119889 is known In practice model order selection tech-niques should be applied to estimate the model order 119889 asdepicted in Figure 3
In the flowchart of Figure 3 we adopted the ExponentialFitting Test (EFT) [43 44] as the model order selectionscheme The EFT has the deflation property that allows usto find suitable thresholds as a function of the Probabilityof False Alarm (Pfa) By exploiting the deflation propertyand by finding suitable thresholds the EFT has been theonly scheme in the literature to estimate 119889 = 1 in thepresence of a strong LoS signal and 119889 = 0 in the onlynoise (no signal) measurements We have compared severalschemes in the literature such as Akaike Information Crite-rion (AIC) [45] Efficient Detection Criterion (EDC) [46]Minimum Description Length (MDL) [47] Steinrsquos unbiasedrisk estimate (SURE) [48] RADOI [49] ESTimation ERror(ESTER) [50] and Subspace-based Automatic Model OrderSelection (SAMOS) [51] The M-EFT [43 44 52] has alsobeen suitable but an even smaller Pfa was required tofind the thresholds The computation of the thresholds ofthe EFT requires an extremely low Pfa The complexity ofsuch a computation is prohibitive Therefore we propose inAppendix A an extrapolation algorithm to compute suchthresholds Note that our proposed extrapolation algorithmhas been applied in [53ndash56] although no details are providedThe reason for extremely low Pfa may be related to thenoise behaviour as shown in Appendix B Note that theIlmenau Package for Model Order Selection (IPM) [57]with MATLAB and Java implementation of the model orderselection schemes can be found at the LASP homepage(httpslaspunbbrindexphppublicationssoftwares)
In order to further improve the accuracy of DoA esti-mation schemes preprocessing schemes can be appliedbeforehand We consider in this work the VandermondeInvariation Technique (VIT) [58] Spatial smoothing (SPS)[59] and Forward Backward Averaging (FBA) [60 61] asa preprocessing schemes As depicted in Figure 3 after the
6 Wireless Communications and Mobile Computing
Table 1 Selected state-of-the-art DoA estimation schemes
Delay And Sum [38] 119875DS (120579) = w (120579)H Rxxw (120579)w (120579)H w (120579) (13)
Capon [39] 119875CAP(120579) = 1w (120579)H Rminus1xxw (120579) (14)
MUSIC [23] 119875M119880119878119868119862(120579) = 1wH (120579)VnVH
nw (120579) (15)ESPRIT [40]
Ψ = J1U+s J2Us (16)Ψ
EVD= EΦEH with Φ = diag [1206011 120601119889] (17)120583119894 = ang(120601119894) 119894 = 1 119889 (18)preprocessing step a matrix Z is returned and used by theDoA methods summarized in Table 1
In Table 1 the vector w(120579) in (13) (14) and (15) varyaccording to the candidate values of 120579 The value of 120579 thatmaximizes the expression in (13) (14) and (15) is the 1205791since in Section 2 the data model assumes that the LoScomponent faces no obstacles Therefore the componentcorresponding to the greatest power should be the samecomponent with DoA equal to 1205791 Us isin C119872times119889 is signalsubspace which is equal to the 119889 eigenvectors correspondingto the 119889 greatest eigenvalues whereasVn isin C119872times119872minus119889 is a basisfor the noise subspace composed by the119872minus 119889 eigenvectorsassociated with to the 119872 minus 119889 smallest eigenvalues In (17)and (18) Φ is the diagonal matrix that has the eigenvaluesof Ψ We compute all the spatial frequencies and the onewhose component has the greatest power is the 1205831 that canbe mapped to 120579134 Tensor-Based DoA Estimation In this subsection atensor factorization namely the PARAFAC decompositionis applied The PARAFAC decomposition generates threefactor matrices from a received tensor X whose structureis detailed in this subsection One factor matrix correspondsto the estimate of the steering matrix A containing DoAinformation In this subsection A is extracted from tensorXto estimate the DoA of the impinging signal
We first consider an unchanging sequence of 119873 symbolstransmitted periodically Such symbols can be found in aheader or footer or even in the payload of a message Alter-natively repeating sequences of symbols can be extractedfrom time periods when no data is being transmitted butthe carrier of the transmitter is active An example is givenas follows Since the oscillators at the transmitter and atthe receiver are never exactly the same a small frequencydeviation or constant phase change is observed at the receiverAt an MSK receiver if the deviation is positive a sequenceof ones can be extracted and if the deviation is negative asequence of zeros is observed
The symbols corresponding to the sequence from the 119894-thsource is represented by the vector c119894 isin C119873times1 Accordinglywe can build a received signal matrix
X119894 (119901) = 120574119894 (119901) a119894 (120583119894) cT119894 isin C119872times119873 (19)
where 119901 is the period corresponding to the sequence trans-mission Generalizing for 119889 signals we find
X (119901) = AD120574 (119901)CT isin C119872times119873 (20)where D120574(119901) = diag([1205741(119901) 1205742(119901) 120574119889(119901)] )T and C =[c1 c2 c119889]
For 119875 transmitted sequences the symbols can be concate-nated along the third dimension to form the received signaltensor
X = [X (1) ⊔3 X (2) ⊔3 ⊔3 X (119875)]isin C119872times119873times119875 (21)
where ⊔3 represents concatenation along the third dimen-sion Since the slices of X can be written as (20) X has aPARAFAC structure and can be decomposed into three factormatrices AC and Γ where Γ contains the diagonals ofD120574(119901)along its rows To factorize X we first rewrite it in threedifferent matrix representations or unfoldings
X(1) = A (C Γ)T (22)X(2) = C (Γ A)T (23)X(3) = Γ (A C)T (24)
where is the Khatri-Rao (column-wise Kroenecker) prod-uct
It is known that minimizing (22) (23) and (24) in theleast squares sense [62] leads to the following solutions
A =X(1) [(C Γ)T]+ (25)Γ =X(2) [(Γ A)T]+ (26)C =X(3) [(A C)T]+ (27)
We consider the well-known Alternating Least Squares(ALS) algorithm to solve (25) (26) and (27) in an iterativeway Since C is known the estimation step (27) is skippedand the ALS algorithm alternates between the estimations ofA and Γ in a two-step approach [63]
Once convergence is achieved we use A to extract theDoA of the 119894-th source as follows
120579119894 = argmax120579
aH119894 (120579) a119894 (28)
Wireless Communications and Mobile Computing 7
Table 2 Number of frames captured at each 10∘ step of the measurement campaign
DoA minus90∘ minus80∘ minus70∘ minus60∘ minus50∘ minus40∘ minus30∘ minus20∘ minus10∘ 0∘ 10∘ 20∘ 30∘ 40∘ 50∘ 60∘ 70∘ 80∘ 90∘Frames 31 29 29 30 33 34 32 29 24 30 32 24 30 33 26 31 43 41 31
Table 3 RMSE for the schemes in Table 1 without the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 23∘ 17∘ 40∘ 28∘ 17∘Variance of the RMSE 43∘ 11∘ 115∘ 41∘ 44∘
Tx Rx
Figure 6 Photo taken during the measurement campaigns of theoutdoor scenario pointing out the positions of the transmitter andof the antenna array based receiver
4 Experiments
In this section we validate our proposed drone trackingdevice with measurement campaigns in an outdoor scenarioIn Section 41 the setup for the measurement campaign isdescribed whereas in Section 42 we present the obtainedresults
41 Experimental Setup In Figure 6 we depict the outdoorscenario used for the measurement campaigns On the right-hand we placed our drone tracking device proposed inSection 3 as the receiver whereas on the left-hand thetransmitter is placed The transmitter is a 2x2 MIMO SDRplatformASPR4 [64] with frequencies ranging from 50MHzto 60 GHz a channel bandwidth varying from 200 kHz to 56MHz and a maximum power of 10 dBm at the output port
As shown in Figure 7 the distance between the transmit-ter and the receiver is 48 m Both transmitter and receiverare placed on tripods 115 cm above the ground Note that thered ldquoXrdquo in Figure 7 is the location from where the photo inFigure 6 has been taken
Both the transmitter and the receiver were set up usinga MSK message signal at 248 GHz carrier frequency and250 kbps of data rate Before starting the experiment the248 GHz frequency was scanned and no noise source wasdetected In order to verify that the receiver properly worksand measures the Bit Error Rate (BER) we have to decodethe signal To this purpose the transmitted package must beknown and consists of pseudo random sequences of length1024 bits and a header and footer with 16 bits each defined as0xFFFF and 0x0000 respectively Therefore the total size ofthe package is 1056 bits The transmitter uses both samplingfrequency and bandwidth of 2MHz At the receiver side a 4
MHz sampling frequency and 4 MHz bandwidth are usedEach captured frame at the receiver has 5120 samples
As shown in Figure 7 the transmitter is fixed and thereceiver rotates from +90∘ to minus90∘ in steps of 10∘ Accordingto Table 2 which presents the number of captured frame perDoA at each 10∘ step about 31 frames of size 5120 samples arecaptured
42 Experimental Results This subsection shows the perfor-mance of the DoA estimation schemes shown in Table 1During the measurement campaign the achieved Bit ErrorRate (BER) was 10minus4
Figure 8 shows the DoA calculated by rotating the basearray over the time Our proposed device works for a DoAranging from minus60∘ to 60∘ The DS Capon MUSIC ESPRITand Tensor combined with preprocessing schemes are shownin Figure 9(b)
In Tables 3 and 4 we present the Root Mean SquareError RMSE for the schemes in Table 1 with and without pre-processing schemes using the measurements from Figure 6respectively The equation for RMSE is given by
RMSE (1205791) = radic 1119876119876sum119902=1
(120579(119902)1 minus 120579(119902)1 )2 (29)where 119902 is one realization of a total of 119876 realizations foreach 10∘ stage of the measurement campaign In other wordsthe acquired data at each 10∘ degree step is reshaped intosmall matrices The computation of the DoA is individuallyperformed for each of these matrices In our experimentwe chose empirically matrices of size 4 times 1000 Since asshown in Table 2 at each 10∘ step 31 frames of size 5120samples are captured in average there are approximately 119876 =158matrices depending on the data reduction performed inSection 331 The variables 120579 and 120579 stand for the actual andthe estimated DoA respectively
Comparing Tables 3 and 4 we can note that except forthe Tensor the algorithms presented improvement in termsof RMSE after incorporating the preprocessing CAPON andthe Tensor increased the variance with the preprocessingThe smallest RMSE was achieved by the DS approach afterpreprocessing Note that the ESPRIT assumes the shiftinvariance property while both MUSIC and ESPRIT exploitthe property of the orthogonality between signal and noisesubspaces Note that both assumptions are approximationsand therefore their exploitation may cause additional errors
8 Wireless Communications and Mobile Computing
Table 4 RMSE for the schemes in Table 1 with the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 16∘ 17∘ 17∘ 19∘ 27∘
Variance of the RMSE 23∘ 25∘ 24∘ 18∘ 237∘
Table 5 Comparison between the obtained results and the DoA estimation in practical measurements results already available in theliterature
Drone detect solutions General DoA solutionsSolutions Proposed [25] [27] [20] [21] [22] [24] [15]DoA precision 19∘ 1∘ 1-3∘ 5∘ 1∘ 4∘ 05-2∘ 2∘Uses anechoic chamber No x x No Yes Yes Yes YesLow cost Yes No No Yes Yes Yes Yes Yes
In Table 5 we compare the DoA estimation resultsobtained with our framework and with the state-of-the-art approaches Furthermore we show that even withoutinvolving anechoic chamber in our tests precise results areobtained in comparison to references that implemented itstests in a nonreflexive environment The lsquoxrsquo means that thecommercial solutions did not provide such informationFinally we provide the information about which of thesolutions has low cost
As shown in Table 6 the total cost of the proposed dronetracking solution is US$ 2222 whereas the solutions in [25]and [27] cost US$ 226000 and US$ 120000 respectivelyTherefore our proposed off-the-shelf solution costs less than2 of the commercial solutions in [25 27]
5 Conclusions
In this paper we have proposed a low cost antenna arraybased drone tracking device for outdoor environments Theproposed solution is divided into hardware and softwareparts The hardware part of the proposed device is based onoff-the-shelf components such as an omnidirectional antennaarray a 4-channel SDR platform with carrier frequencyranging from 70MHz to 6 GHz a FPGAmotherboard and alaptop The software part includes algorithms for calibrationmodel order selection (MOS) andDoAestimation includingspecific preprocessing steps to increase the DoA accuracyWe have evaluated the performance of our proposed low costsolution in outdoor scenarios Our measurement campaignshave shown that when the array is in the front fire positionie with a DoA ranging from minus60∘ to 60∘ the maximumand the average DoA errors are 6∘ and 19∘ respectively Ourproposed off-the-shelf solution costs less than 2 of com-mercial solutions in [25 27] In order to further improve ouranalysis of the proposed system and our results experimentsin an anechoic chamber can be performed Moreover theperformance of the proposed framework can be improvedby incorporating interpolation schemes Perspectives alsoinclude the adoption of a more realistic noise model tosimplify the computation of the thresholds of the ExponentialFitting Test (EFT)
Appendix
A Proposed Extrapolation Algorithm toFind the EFT Thresholds for ExtremelyLow Probability of False Alarm
In this appendix we propose an extrapolation algorithm toestimate the thresholds of the EFT algorithm in cases that theProbability of False Alarm (Pfa) is extremely low
The EFT is based on the approximation that the profile ofthe ordered noise eigenvalues has an exponential behaviourThe profile 119886(119872119873) can be expressed as
119886 (119872119873)= radic 12 ( 151198722 + 2 minus radic 225(1198722 + 2)2 minus 180119872119873(1198722 minus 1) (1198722 + 2))
(A1)
Given that 119889 = 119872 minus 119875lowast our goal is to vary 119875 such thatwe find 119875lowast that 119872minus119875 ≪ 120582119872minus119875 where 119872minus119875 and 120582119872minus119875 standfor predicted (119872 minus 119875)th noise eigenvalue and119872 minus 119875 standsfor actual eigenvalue respectively Note that the EFT assumesthat smallest eigenvalue is a noise eigenvalue Therefore 119875varies from 1 to 119872 minus 1 Using (A1) [44] has derived thefollowing expression
119872minus119875 = (119875 + 1) sdot ( 1 minus 119886 (119875 + 1119873)1 minus 119886 (119875 + 1119873)119875+1) sdot 1205902 (A2)
1205902 = 1119875 + 1119873sum119894=0
120582119872minus119894 (A3)
where 1205902 is the estimated noise powerIn order to improve further the performance of the
EFT approach thresholds coefficients 120578119875 are computed usingnoise-only simulated data following Complex-Valued Circu-larly Symmetric Gaussian and identically and independently
Wireless Communications and Mobile Computing 9
Table 6 Price table for the hardware of the proposed drone tracker device
Hardware Cost (US$)AD-FMCOMMS5-EBZ-ND [33] 10804 times Dual-Band Antenna 24 amp 5GHz [36] 11ZYNQ 7000 Zc702 [35] 999Power Divider 24-6GHz 30Watts RoHS IP67 [41] 1095 times cable 305mm HPP100 SMA [42] 23Total 2222
Few small trees
Empty areawith sand floor
48 mTX
Met
al fe
nce
X
Several tall trees
Bushes
0∘
90∘
minus90∘
RX
Figure 7 Top view of the outdoor scenario for the measurement campaigns including the positions of the transmitter and of the antennaarray based receiver
Time (samples)0 100 200 300 400 500 600
DoA
DsCaponMusic
EspritExpectedTensor DS
minus100
100
minus80
80
minus60
60
minus40
40
minus20
20
0
Ang
les (
>A
LM
∘ )
Figure 8 Comparison between the DoA estimation schemes byvarying the DoA from +60∘ to minus60∘ with steps of 10∘
distributed (iid) as indicated in Section 2 Depending on the120578119875 we have two hypothesisH119875 1003816100381610038161003816100381610038161003816100381610038161003816
120582119872minus119875 minus 119872minus119875119872minus1198751003816100381610038161003816100381610038161003816100381610038161003816 le 120578119875 (A4)
H119875 1003816100381610038161003816100381610038161003816100381610038161003816120582119872minus119875 minus 119872minus119875119872minus119875
1003816100381610038161003816100381610038161003816100381610038161003816 gt 120578119875 (A5)
where H119875 120582119872minus119875 is a noise eigenvalue and H119875 120582119872minus119875 isa signal eigenvalue In order to have all 120578119875 depending of thePfa we can define the Pfa as
Pfa = Pr [d = 0 | d = 0] (A6)
Note that the 120578119875 thresholds are obtained by Monte Carlosimulations carried out in the only-noise scenario followingthe steps in [44] and by choosing the following amount ofrealizations
I = 10Pfa (A7)
10 Wireless Communications and Mobile Computing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(a) Without preprocessing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(b) With preprocessing
Figure 9 Comparison of the DoA estimation error between the DoA estimation schemes from Table 1 by varying the angle from minus90∘ to 90∘with steps of 10∘
Threshold
Prob
abili
ty o
f Fal
se A
larm
Linear ExtrapolationOriginal function
1 2
FIA10(pfa1)
FIA10(pfa2)
Figure 10 Log linear extrapolation based on two points given by Pfas and thresholds 120578119875Depending on the noise behaviour and the parameters
of the scenario [54 56] the thresholds can be extremelylowTherefore the computational complexity of (A7) can beprohibitive In order to overcome such limitation we proposean extrapolation approach to compute the thresholds forextremely low values of Pfa
Sincewewish to estimate values outside the known limitswe can use an extrapolation method and approximate thedescending side of the curve as a decreasing exponential Inorder to simplify the approximation we adopt a logarithmicscale as exemplified in Figure 10
Given the two known points in Figure 10 obtained byMonte Carlo simulations and given the linear extrapolation
in (A8) we can compute the two unknown constants a andb
Pfa = a sdot 120578P + b (A8)
The constants a and b are given by (A9) and (A10)by using the two known points (log10(Pfa1) 1205781) and(log10(Pfa2) 1205782)
119886 = log10 (Pfa2Pfa1)(1205782 minus 1205781) (A9)
119887 = log10 (Pfa2) minus 1205782 sdot ( log10 (Pfa2Pfa1)(1205782 minus 1205781) ) (A10)
Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

4 Wireless Communications and Mobile Computing
RX A1 RX A2 RX A3 RX A4
Figure 2 Proposed low cost antenna array based drone trackingdevice with 4 element ULA and a 4 times 4 MIMO SDR
Since each channel is related to each line of the matrix Xin order to compute the phase shift between two channels wecompute the phase difference of two consecutive antennas
120596 (119898 ) = Φ (119898 ) minusΦ (119903 ) isin C1times119873 (7)
where Φ stands for the matrix containing the calculatedphases by (6) 119903 indicates the reference channel and119898 variesfrom 1 toMThis reference channel can be randomly selectedfrom 1 to 119872 and is the input of the SDR that is used as areference to compensate the phase imbalance from the otherinputs Since the vector 120596(119898 ) is the119898-th row ofmatrixΩ incase119898 = 119894 the 119894-th row ofΩ is filled with zeros Finally sincethe phase difference may slightly vary for different samples inthe same row of Ω due to the thermal noise we compute thearithmetic mean of the elements of each row of Ω obtainingthe vector 120596 isin C119872times1 and its119898-th element is given by
120596 (119898) = 1119873119873sum119899=1
Ω (119898 119899) (8)
Hence in order to compensate the phase shift betweentwo different channels we compute the vector c isin C119872times1 The119898-th element is given by
c (119898) = eminus119895120596(119898) (9)
Note that the compensation vector c is computed only oncefor the system initialization The calibrated outputs of theantenna array are given by the following expression
Xc = diag cX (10)
where the operator diagsdot transforms its argument vectorinto the main diagonal of a diagonal matrix
32 Hardware Assembling for the Drone Tracking Measure-ment Campaign After the hardware has been calibratedthe next step is to assembly it in order to perform themeasurements
The four-element omnidirectional antenna array is con-nected to the calibrated hardware composed of the FPGAmotherboard and SDR daughterboard according to Figure 2Each antenna is dual band (from 2400MHz to 24835MHz
and from 4900 MHz to 5875 MHz ) [36] and has linearpolarization with 37 dBi of gain The space Δ between twoconsecutive antennas is equal to 599 cm The operationalfrequency119891 = 25GHz is themaximum frequency that avoidsaliasing
33 Framework for DoA Estimation Here we first propose asample selection approach for DoA estimation by automaticphase deviation detection Then we formulate a DoA esti-mation framework exploiting preprocessing techniques andmodel order selection schemes
Figure 3 depicts the flowchart of the proposed signalprocessing solution for DoA estimation
As shown in Box 2 of the Figure 3 the phase deviationcorrection proposed in Section 31 returns a matrix Xc that isused in the sample selection scheme in Section 331
331 Sample Selection for DoA Estimation by AutomaticPhase Deviation Detection As exemplified Xc in Figure 4empirically we observed that the hardware causes phasedeviations on the samples in random time instantsThereforewe propose an approach to select the samples with phasedeviations for the DoA estimation
Note that the phase compensation proposed in Section 31has been applied to the samples whose matrix Φ containingthe phases are depicted in Figure 4 Furthermore note thatthere are significant deviations that can degrade the DoAestimation process The main objective here is to removethese phase deviations
As shown in Figure 5 such ripples can be better visualizedby computing the phase difference in the time dimensionaccording to the following expression
120574 (119898 119894) = (120601 (119898 119894 + 1) minus 120601 (119898 119894))2 (11)
where 120574(119898 119894) is the value containing the quadratic differenceof two consecutive time samples 119894 and 119894 + 1 of the 119898-thchannelThe120601(119898 119894) from (6) is the element in position (119898 119894)of the matrix Φ
Figure 5 draws the Γ that contains the result of (11) Bydetecting the peaks we can identify which samples shouldbe removed For this task we apply the approach proposedin [37] which returns the green curve with the value of thethresholdTherefore the samples whose phase differences aregreater than the threshold are removed The result after thesamples removed is presented in the following equation
Xcs = [Xc ( 1 1198731) | Xc ( 1198732 1198733) | sdot sdot sdot |Xc ( 119873119879minus1 119873119879)] (12)
where Xcs is the matrix with the selected samples Note that119873119879 = 119873 and the values of N119905 for 119905 = 1 119879 are found bycomparing the phase difference values with the threshold inFigure 5
332 DoA Estimation Framework According to Figure 3the matrix Xcs given in (12) is used to improve the DoAestimation with preprocessing schemes There are several
Wireless Communications and Mobile Computing 5
Phase DeviationCorrection
(Section 31)2 3 4
5
1
6
Xc Xcs
Xcs XcsX Z
Sample Selectionvia [25]
Optional Pre-Processing
(Section 332)
Direction of ArrivalEstimation(Table 1)
Model OrderSelection
(Section 332)
Capturateddata X
d 1
Figure 3 Flowchart of the proposed solution for DoA estimation
Samples (time)
Phas
e (deg)
0
2
4
6
8
10
12
14
Antenna 1 Antenna 2
Antenna 3 Antenna 4
0 1 286
88
9
92times104
times104
times105
times1060 05 1 15 2 25 353 4 45
Figure 4 Phase of the received data in each antenna An exampleof phase deviation region is highlighted in the zoom area
Samples (time)
Der
ivat
ive o
f pha
se (r
ad)
0
05
1
15
2
25
3
Antenna1Antenna2Antenna3
Antenna4Threshold via [24]
32 33 34 35 36 37 38 39times106
Figure 5 Difference between consecutive samples from Figure 4
DoA estimation schemes in the literature such as beamform-ing approaches and subspace-based approaches Examplesof beamforming are Delay and Sum [38] and Capon [39]whereas examples of classical subspace-based approaches areMUSIC [23] and ESPRIT [40]
The DoA estimation schemes assume that the modelorder 119889 is known In practice model order selection tech-niques should be applied to estimate the model order 119889 asdepicted in Figure 3
In the flowchart of Figure 3 we adopted the ExponentialFitting Test (EFT) [43 44] as the model order selectionscheme The EFT has the deflation property that allows usto find suitable thresholds as a function of the Probabilityof False Alarm (Pfa) By exploiting the deflation propertyand by finding suitable thresholds the EFT has been theonly scheme in the literature to estimate 119889 = 1 in thepresence of a strong LoS signal and 119889 = 0 in the onlynoise (no signal) measurements We have compared severalschemes in the literature such as Akaike Information Crite-rion (AIC) [45] Efficient Detection Criterion (EDC) [46]Minimum Description Length (MDL) [47] Steinrsquos unbiasedrisk estimate (SURE) [48] RADOI [49] ESTimation ERror(ESTER) [50] and Subspace-based Automatic Model OrderSelection (SAMOS) [51] The M-EFT [43 44 52] has alsobeen suitable but an even smaller Pfa was required tofind the thresholds The computation of the thresholds ofthe EFT requires an extremely low Pfa The complexity ofsuch a computation is prohibitive Therefore we propose inAppendix A an extrapolation algorithm to compute suchthresholds Note that our proposed extrapolation algorithmhas been applied in [53ndash56] although no details are providedThe reason for extremely low Pfa may be related to thenoise behaviour as shown in Appendix B Note that theIlmenau Package for Model Order Selection (IPM) [57]with MATLAB and Java implementation of the model orderselection schemes can be found at the LASP homepage(httpslaspunbbrindexphppublicationssoftwares)
In order to further improve the accuracy of DoA esti-mation schemes preprocessing schemes can be appliedbeforehand We consider in this work the VandermondeInvariation Technique (VIT) [58] Spatial smoothing (SPS)[59] and Forward Backward Averaging (FBA) [60 61] asa preprocessing schemes As depicted in Figure 3 after the
6 Wireless Communications and Mobile Computing
Table 1 Selected state-of-the-art DoA estimation schemes
Delay And Sum [38] 119875DS (120579) = w (120579)H Rxxw (120579)w (120579)H w (120579) (13)
Capon [39] 119875CAP(120579) = 1w (120579)H Rminus1xxw (120579) (14)
MUSIC [23] 119875M119880119878119868119862(120579) = 1wH (120579)VnVH
nw (120579) (15)ESPRIT [40]
Ψ = J1U+s J2Us (16)Ψ
EVD= EΦEH with Φ = diag [1206011 120601119889] (17)120583119894 = ang(120601119894) 119894 = 1 119889 (18)preprocessing step a matrix Z is returned and used by theDoA methods summarized in Table 1
In Table 1 the vector w(120579) in (13) (14) and (15) varyaccording to the candidate values of 120579 The value of 120579 thatmaximizes the expression in (13) (14) and (15) is the 1205791since in Section 2 the data model assumes that the LoScomponent faces no obstacles Therefore the componentcorresponding to the greatest power should be the samecomponent with DoA equal to 1205791 Us isin C119872times119889 is signalsubspace which is equal to the 119889 eigenvectors correspondingto the 119889 greatest eigenvalues whereasVn isin C119872times119872minus119889 is a basisfor the noise subspace composed by the119872minus 119889 eigenvectorsassociated with to the 119872 minus 119889 smallest eigenvalues In (17)and (18) Φ is the diagonal matrix that has the eigenvaluesof Ψ We compute all the spatial frequencies and the onewhose component has the greatest power is the 1205831 that canbe mapped to 120579134 Tensor-Based DoA Estimation In this subsection atensor factorization namely the PARAFAC decompositionis applied The PARAFAC decomposition generates threefactor matrices from a received tensor X whose structureis detailed in this subsection One factor matrix correspondsto the estimate of the steering matrix A containing DoAinformation In this subsection A is extracted from tensorXto estimate the DoA of the impinging signal
We first consider an unchanging sequence of 119873 symbolstransmitted periodically Such symbols can be found in aheader or footer or even in the payload of a message Alter-natively repeating sequences of symbols can be extractedfrom time periods when no data is being transmitted butthe carrier of the transmitter is active An example is givenas follows Since the oscillators at the transmitter and atthe receiver are never exactly the same a small frequencydeviation or constant phase change is observed at the receiverAt an MSK receiver if the deviation is positive a sequenceof ones can be extracted and if the deviation is negative asequence of zeros is observed
The symbols corresponding to the sequence from the 119894-thsource is represented by the vector c119894 isin C119873times1 Accordinglywe can build a received signal matrix
X119894 (119901) = 120574119894 (119901) a119894 (120583119894) cT119894 isin C119872times119873 (19)
where 119901 is the period corresponding to the sequence trans-mission Generalizing for 119889 signals we find
X (119901) = AD120574 (119901)CT isin C119872times119873 (20)where D120574(119901) = diag([1205741(119901) 1205742(119901) 120574119889(119901)] )T and C =[c1 c2 c119889]
For 119875 transmitted sequences the symbols can be concate-nated along the third dimension to form the received signaltensor
X = [X (1) ⊔3 X (2) ⊔3 ⊔3 X (119875)]isin C119872times119873times119875 (21)
where ⊔3 represents concatenation along the third dimen-sion Since the slices of X can be written as (20) X has aPARAFAC structure and can be decomposed into three factormatrices AC and Γ where Γ contains the diagonals ofD120574(119901)along its rows To factorize X we first rewrite it in threedifferent matrix representations or unfoldings
X(1) = A (C Γ)T (22)X(2) = C (Γ A)T (23)X(3) = Γ (A C)T (24)
where is the Khatri-Rao (column-wise Kroenecker) prod-uct
It is known that minimizing (22) (23) and (24) in theleast squares sense [62] leads to the following solutions
A =X(1) [(C Γ)T]+ (25)Γ =X(2) [(Γ A)T]+ (26)C =X(3) [(A C)T]+ (27)
We consider the well-known Alternating Least Squares(ALS) algorithm to solve (25) (26) and (27) in an iterativeway Since C is known the estimation step (27) is skippedand the ALS algorithm alternates between the estimations ofA and Γ in a two-step approach [63]
Once convergence is achieved we use A to extract theDoA of the 119894-th source as follows
120579119894 = argmax120579
aH119894 (120579) a119894 (28)
Wireless Communications and Mobile Computing 7
Table 2 Number of frames captured at each 10∘ step of the measurement campaign
DoA minus90∘ minus80∘ minus70∘ minus60∘ minus50∘ minus40∘ minus30∘ minus20∘ minus10∘ 0∘ 10∘ 20∘ 30∘ 40∘ 50∘ 60∘ 70∘ 80∘ 90∘Frames 31 29 29 30 33 34 32 29 24 30 32 24 30 33 26 31 43 41 31
Table 3 RMSE for the schemes in Table 1 without the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 23∘ 17∘ 40∘ 28∘ 17∘Variance of the RMSE 43∘ 11∘ 115∘ 41∘ 44∘
Tx Rx
Figure 6 Photo taken during the measurement campaigns of theoutdoor scenario pointing out the positions of the transmitter andof the antenna array based receiver
4 Experiments
In this section we validate our proposed drone trackingdevice with measurement campaigns in an outdoor scenarioIn Section 41 the setup for the measurement campaign isdescribed whereas in Section 42 we present the obtainedresults
41 Experimental Setup In Figure 6 we depict the outdoorscenario used for the measurement campaigns On the right-hand we placed our drone tracking device proposed inSection 3 as the receiver whereas on the left-hand thetransmitter is placed The transmitter is a 2x2 MIMO SDRplatformASPR4 [64] with frequencies ranging from 50MHzto 60 GHz a channel bandwidth varying from 200 kHz to 56MHz and a maximum power of 10 dBm at the output port
As shown in Figure 7 the distance between the transmit-ter and the receiver is 48 m Both transmitter and receiverare placed on tripods 115 cm above the ground Note that thered ldquoXrdquo in Figure 7 is the location from where the photo inFigure 6 has been taken
Both the transmitter and the receiver were set up usinga MSK message signal at 248 GHz carrier frequency and250 kbps of data rate Before starting the experiment the248 GHz frequency was scanned and no noise source wasdetected In order to verify that the receiver properly worksand measures the Bit Error Rate (BER) we have to decodethe signal To this purpose the transmitted package must beknown and consists of pseudo random sequences of length1024 bits and a header and footer with 16 bits each defined as0xFFFF and 0x0000 respectively Therefore the total size ofthe package is 1056 bits The transmitter uses both samplingfrequency and bandwidth of 2MHz At the receiver side a 4
MHz sampling frequency and 4 MHz bandwidth are usedEach captured frame at the receiver has 5120 samples
As shown in Figure 7 the transmitter is fixed and thereceiver rotates from +90∘ to minus90∘ in steps of 10∘ Accordingto Table 2 which presents the number of captured frame perDoA at each 10∘ step about 31 frames of size 5120 samples arecaptured
42 Experimental Results This subsection shows the perfor-mance of the DoA estimation schemes shown in Table 1During the measurement campaign the achieved Bit ErrorRate (BER) was 10minus4
Figure 8 shows the DoA calculated by rotating the basearray over the time Our proposed device works for a DoAranging from minus60∘ to 60∘ The DS Capon MUSIC ESPRITand Tensor combined with preprocessing schemes are shownin Figure 9(b)
In Tables 3 and 4 we present the Root Mean SquareError RMSE for the schemes in Table 1 with and without pre-processing schemes using the measurements from Figure 6respectively The equation for RMSE is given by
RMSE (1205791) = radic 1119876119876sum119902=1
(120579(119902)1 minus 120579(119902)1 )2 (29)where 119902 is one realization of a total of 119876 realizations foreach 10∘ stage of the measurement campaign In other wordsthe acquired data at each 10∘ degree step is reshaped intosmall matrices The computation of the DoA is individuallyperformed for each of these matrices In our experimentwe chose empirically matrices of size 4 times 1000 Since asshown in Table 2 at each 10∘ step 31 frames of size 5120samples are captured in average there are approximately 119876 =158matrices depending on the data reduction performed inSection 331 The variables 120579 and 120579 stand for the actual andthe estimated DoA respectively
Comparing Tables 3 and 4 we can note that except forthe Tensor the algorithms presented improvement in termsof RMSE after incorporating the preprocessing CAPON andthe Tensor increased the variance with the preprocessingThe smallest RMSE was achieved by the DS approach afterpreprocessing Note that the ESPRIT assumes the shiftinvariance property while both MUSIC and ESPRIT exploitthe property of the orthogonality between signal and noisesubspaces Note that both assumptions are approximationsand therefore their exploitation may cause additional errors
8 Wireless Communications and Mobile Computing
Table 4 RMSE for the schemes in Table 1 with the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 16∘ 17∘ 17∘ 19∘ 27∘
Variance of the RMSE 23∘ 25∘ 24∘ 18∘ 237∘
Table 5 Comparison between the obtained results and the DoA estimation in practical measurements results already available in theliterature
Drone detect solutions General DoA solutionsSolutions Proposed [25] [27] [20] [21] [22] [24] [15]DoA precision 19∘ 1∘ 1-3∘ 5∘ 1∘ 4∘ 05-2∘ 2∘Uses anechoic chamber No x x No Yes Yes Yes YesLow cost Yes No No Yes Yes Yes Yes Yes
In Table 5 we compare the DoA estimation resultsobtained with our framework and with the state-of-the-art approaches Furthermore we show that even withoutinvolving anechoic chamber in our tests precise results areobtained in comparison to references that implemented itstests in a nonreflexive environment The lsquoxrsquo means that thecommercial solutions did not provide such informationFinally we provide the information about which of thesolutions has low cost
As shown in Table 6 the total cost of the proposed dronetracking solution is US$ 2222 whereas the solutions in [25]and [27] cost US$ 226000 and US$ 120000 respectivelyTherefore our proposed off-the-shelf solution costs less than2 of the commercial solutions in [25 27]
5 Conclusions
In this paper we have proposed a low cost antenna arraybased drone tracking device for outdoor environments Theproposed solution is divided into hardware and softwareparts The hardware part of the proposed device is based onoff-the-shelf components such as an omnidirectional antennaarray a 4-channel SDR platform with carrier frequencyranging from 70MHz to 6 GHz a FPGAmotherboard and alaptop The software part includes algorithms for calibrationmodel order selection (MOS) andDoAestimation includingspecific preprocessing steps to increase the DoA accuracyWe have evaluated the performance of our proposed low costsolution in outdoor scenarios Our measurement campaignshave shown that when the array is in the front fire positionie with a DoA ranging from minus60∘ to 60∘ the maximumand the average DoA errors are 6∘ and 19∘ respectively Ourproposed off-the-shelf solution costs less than 2 of com-mercial solutions in [25 27] In order to further improve ouranalysis of the proposed system and our results experimentsin an anechoic chamber can be performed Moreover theperformance of the proposed framework can be improvedby incorporating interpolation schemes Perspectives alsoinclude the adoption of a more realistic noise model tosimplify the computation of the thresholds of the ExponentialFitting Test (EFT)
Appendix
A Proposed Extrapolation Algorithm toFind the EFT Thresholds for ExtremelyLow Probability of False Alarm
In this appendix we propose an extrapolation algorithm toestimate the thresholds of the EFT algorithm in cases that theProbability of False Alarm (Pfa) is extremely low
The EFT is based on the approximation that the profile ofthe ordered noise eigenvalues has an exponential behaviourThe profile 119886(119872119873) can be expressed as
119886 (119872119873)= radic 12 ( 151198722 + 2 minus radic 225(1198722 + 2)2 minus 180119872119873(1198722 minus 1) (1198722 + 2))
(A1)
Given that 119889 = 119872 minus 119875lowast our goal is to vary 119875 such thatwe find 119875lowast that 119872minus119875 ≪ 120582119872minus119875 where 119872minus119875 and 120582119872minus119875 standfor predicted (119872 minus 119875)th noise eigenvalue and119872 minus 119875 standsfor actual eigenvalue respectively Note that the EFT assumesthat smallest eigenvalue is a noise eigenvalue Therefore 119875varies from 1 to 119872 minus 1 Using (A1) [44] has derived thefollowing expression
119872minus119875 = (119875 + 1) sdot ( 1 minus 119886 (119875 + 1119873)1 minus 119886 (119875 + 1119873)119875+1) sdot 1205902 (A2)
1205902 = 1119875 + 1119873sum119894=0
120582119872minus119894 (A3)
where 1205902 is the estimated noise powerIn order to improve further the performance of the
EFT approach thresholds coefficients 120578119875 are computed usingnoise-only simulated data following Complex-Valued Circu-larly Symmetric Gaussian and identically and independently
Wireless Communications and Mobile Computing 9
Table 6 Price table for the hardware of the proposed drone tracker device
Hardware Cost (US$)AD-FMCOMMS5-EBZ-ND [33] 10804 times Dual-Band Antenna 24 amp 5GHz [36] 11ZYNQ 7000 Zc702 [35] 999Power Divider 24-6GHz 30Watts RoHS IP67 [41] 1095 times cable 305mm HPP100 SMA [42] 23Total 2222
Few small trees
Empty areawith sand floor
48 mTX
Met
al fe
nce
X
Several tall trees
Bushes
0∘
90∘
minus90∘
RX
Figure 7 Top view of the outdoor scenario for the measurement campaigns including the positions of the transmitter and of the antennaarray based receiver
Time (samples)0 100 200 300 400 500 600
DoA
DsCaponMusic
EspritExpectedTensor DS
minus100
100
minus80
80
minus60
60
minus40
40
minus20
20
0
Ang
les (
>A
LM
∘ )
Figure 8 Comparison between the DoA estimation schemes byvarying the DoA from +60∘ to minus60∘ with steps of 10∘
distributed (iid) as indicated in Section 2 Depending on the120578119875 we have two hypothesisH119875 1003816100381610038161003816100381610038161003816100381610038161003816
120582119872minus119875 minus 119872minus119875119872minus1198751003816100381610038161003816100381610038161003816100381610038161003816 le 120578119875 (A4)
H119875 1003816100381610038161003816100381610038161003816100381610038161003816120582119872minus119875 minus 119872minus119875119872minus119875
1003816100381610038161003816100381610038161003816100381610038161003816 gt 120578119875 (A5)
where H119875 120582119872minus119875 is a noise eigenvalue and H119875 120582119872minus119875 isa signal eigenvalue In order to have all 120578119875 depending of thePfa we can define the Pfa as
Pfa = Pr [d = 0 | d = 0] (A6)
Note that the 120578119875 thresholds are obtained by Monte Carlosimulations carried out in the only-noise scenario followingthe steps in [44] and by choosing the following amount ofrealizations
I = 10Pfa (A7)
10 Wireless Communications and Mobile Computing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(a) Without preprocessing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(b) With preprocessing
Figure 9 Comparison of the DoA estimation error between the DoA estimation schemes from Table 1 by varying the angle from minus90∘ to 90∘with steps of 10∘
Threshold
Prob
abili
ty o
f Fal
se A
larm
Linear ExtrapolationOriginal function
1 2
FIA10(pfa1)
FIA10(pfa2)
Figure 10 Log linear extrapolation based on two points given by Pfas and thresholds 120578119875Depending on the noise behaviour and the parameters
of the scenario [54 56] the thresholds can be extremelylowTherefore the computational complexity of (A7) can beprohibitive In order to overcome such limitation we proposean extrapolation approach to compute the thresholds forextremely low values of Pfa
Sincewewish to estimate values outside the known limitswe can use an extrapolation method and approximate thedescending side of the curve as a decreasing exponential Inorder to simplify the approximation we adopt a logarithmicscale as exemplified in Figure 10
Given the two known points in Figure 10 obtained byMonte Carlo simulations and given the linear extrapolation
in (A8) we can compute the two unknown constants a andb
Pfa = a sdot 120578P + b (A8)
The constants a and b are given by (A9) and (A10)by using the two known points (log10(Pfa1) 1205781) and(log10(Pfa2) 1205782)
119886 = log10 (Pfa2Pfa1)(1205782 minus 1205781) (A9)
119887 = log10 (Pfa2) minus 1205782 sdot ( log10 (Pfa2Pfa1)(1205782 minus 1205781) ) (A10)
Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Wireless Communications and Mobile Computing 5
Phase DeviationCorrection
(Section 31)2 3 4
5
1
6
Xc Xcs
Xcs XcsX Z
Sample Selectionvia [25]
Optional Pre-Processing
(Section 332)
Direction of ArrivalEstimation(Table 1)
Model OrderSelection
(Section 332)
Capturateddata X
d 1
Figure 3 Flowchart of the proposed solution for DoA estimation
Samples (time)
Phas
e (deg)
0
2
4
6
8
10
12
14
Antenna 1 Antenna 2
Antenna 3 Antenna 4
0 1 286
88
9
92times104
times104
times105
times1060 05 1 15 2 25 353 4 45
Figure 4 Phase of the received data in each antenna An exampleof phase deviation region is highlighted in the zoom area
Samples (time)
Der
ivat
ive o
f pha
se (r
ad)
0
05
1
15
2
25
3
Antenna1Antenna2Antenna3
Antenna4Threshold via [24]
32 33 34 35 36 37 38 39times106
Figure 5 Difference between consecutive samples from Figure 4
DoA estimation schemes in the literature such as beamform-ing approaches and subspace-based approaches Examplesof beamforming are Delay and Sum [38] and Capon [39]whereas examples of classical subspace-based approaches areMUSIC [23] and ESPRIT [40]
The DoA estimation schemes assume that the modelorder 119889 is known In practice model order selection tech-niques should be applied to estimate the model order 119889 asdepicted in Figure 3
In the flowchart of Figure 3 we adopted the ExponentialFitting Test (EFT) [43 44] as the model order selectionscheme The EFT has the deflation property that allows usto find suitable thresholds as a function of the Probabilityof False Alarm (Pfa) By exploiting the deflation propertyand by finding suitable thresholds the EFT has been theonly scheme in the literature to estimate 119889 = 1 in thepresence of a strong LoS signal and 119889 = 0 in the onlynoise (no signal) measurements We have compared severalschemes in the literature such as Akaike Information Crite-rion (AIC) [45] Efficient Detection Criterion (EDC) [46]Minimum Description Length (MDL) [47] Steinrsquos unbiasedrisk estimate (SURE) [48] RADOI [49] ESTimation ERror(ESTER) [50] and Subspace-based Automatic Model OrderSelection (SAMOS) [51] The M-EFT [43 44 52] has alsobeen suitable but an even smaller Pfa was required tofind the thresholds The computation of the thresholds ofthe EFT requires an extremely low Pfa The complexity ofsuch a computation is prohibitive Therefore we propose inAppendix A an extrapolation algorithm to compute suchthresholds Note that our proposed extrapolation algorithmhas been applied in [53ndash56] although no details are providedThe reason for extremely low Pfa may be related to thenoise behaviour as shown in Appendix B Note that theIlmenau Package for Model Order Selection (IPM) [57]with MATLAB and Java implementation of the model orderselection schemes can be found at the LASP homepage(httpslaspunbbrindexphppublicationssoftwares)
In order to further improve the accuracy of DoA esti-mation schemes preprocessing schemes can be appliedbeforehand We consider in this work the VandermondeInvariation Technique (VIT) [58] Spatial smoothing (SPS)[59] and Forward Backward Averaging (FBA) [60 61] asa preprocessing schemes As depicted in Figure 3 after the
6 Wireless Communications and Mobile Computing
Table 1 Selected state-of-the-art DoA estimation schemes
Delay And Sum [38] 119875DS (120579) = w (120579)H Rxxw (120579)w (120579)H w (120579) (13)
Capon [39] 119875CAP(120579) = 1w (120579)H Rminus1xxw (120579) (14)
MUSIC [23] 119875M119880119878119868119862(120579) = 1wH (120579)VnVH
nw (120579) (15)ESPRIT [40]
Ψ = J1U+s J2Us (16)Ψ
EVD= EΦEH with Φ = diag [1206011 120601119889] (17)120583119894 = ang(120601119894) 119894 = 1 119889 (18)preprocessing step a matrix Z is returned and used by theDoA methods summarized in Table 1
In Table 1 the vector w(120579) in (13) (14) and (15) varyaccording to the candidate values of 120579 The value of 120579 thatmaximizes the expression in (13) (14) and (15) is the 1205791since in Section 2 the data model assumes that the LoScomponent faces no obstacles Therefore the componentcorresponding to the greatest power should be the samecomponent with DoA equal to 1205791 Us isin C119872times119889 is signalsubspace which is equal to the 119889 eigenvectors correspondingto the 119889 greatest eigenvalues whereasVn isin C119872times119872minus119889 is a basisfor the noise subspace composed by the119872minus 119889 eigenvectorsassociated with to the 119872 minus 119889 smallest eigenvalues In (17)and (18) Φ is the diagonal matrix that has the eigenvaluesof Ψ We compute all the spatial frequencies and the onewhose component has the greatest power is the 1205831 that canbe mapped to 120579134 Tensor-Based DoA Estimation In this subsection atensor factorization namely the PARAFAC decompositionis applied The PARAFAC decomposition generates threefactor matrices from a received tensor X whose structureis detailed in this subsection One factor matrix correspondsto the estimate of the steering matrix A containing DoAinformation In this subsection A is extracted from tensorXto estimate the DoA of the impinging signal
We first consider an unchanging sequence of 119873 symbolstransmitted periodically Such symbols can be found in aheader or footer or even in the payload of a message Alter-natively repeating sequences of symbols can be extractedfrom time periods when no data is being transmitted butthe carrier of the transmitter is active An example is givenas follows Since the oscillators at the transmitter and atthe receiver are never exactly the same a small frequencydeviation or constant phase change is observed at the receiverAt an MSK receiver if the deviation is positive a sequenceof ones can be extracted and if the deviation is negative asequence of zeros is observed
The symbols corresponding to the sequence from the 119894-thsource is represented by the vector c119894 isin C119873times1 Accordinglywe can build a received signal matrix
X119894 (119901) = 120574119894 (119901) a119894 (120583119894) cT119894 isin C119872times119873 (19)
where 119901 is the period corresponding to the sequence trans-mission Generalizing for 119889 signals we find
X (119901) = AD120574 (119901)CT isin C119872times119873 (20)where D120574(119901) = diag([1205741(119901) 1205742(119901) 120574119889(119901)] )T and C =[c1 c2 c119889]
For 119875 transmitted sequences the symbols can be concate-nated along the third dimension to form the received signaltensor
X = [X (1) ⊔3 X (2) ⊔3 ⊔3 X (119875)]isin C119872times119873times119875 (21)
where ⊔3 represents concatenation along the third dimen-sion Since the slices of X can be written as (20) X has aPARAFAC structure and can be decomposed into three factormatrices AC and Γ where Γ contains the diagonals ofD120574(119901)along its rows To factorize X we first rewrite it in threedifferent matrix representations or unfoldings
X(1) = A (C Γ)T (22)X(2) = C (Γ A)T (23)X(3) = Γ (A C)T (24)
where is the Khatri-Rao (column-wise Kroenecker) prod-uct
It is known that minimizing (22) (23) and (24) in theleast squares sense [62] leads to the following solutions
A =X(1) [(C Γ)T]+ (25)Γ =X(2) [(Γ A)T]+ (26)C =X(3) [(A C)T]+ (27)
We consider the well-known Alternating Least Squares(ALS) algorithm to solve (25) (26) and (27) in an iterativeway Since C is known the estimation step (27) is skippedand the ALS algorithm alternates between the estimations ofA and Γ in a two-step approach [63]
Once convergence is achieved we use A to extract theDoA of the 119894-th source as follows
120579119894 = argmax120579
aH119894 (120579) a119894 (28)
Wireless Communications and Mobile Computing 7
Table 2 Number of frames captured at each 10∘ step of the measurement campaign
DoA minus90∘ minus80∘ minus70∘ minus60∘ minus50∘ minus40∘ minus30∘ minus20∘ minus10∘ 0∘ 10∘ 20∘ 30∘ 40∘ 50∘ 60∘ 70∘ 80∘ 90∘Frames 31 29 29 30 33 34 32 29 24 30 32 24 30 33 26 31 43 41 31
Table 3 RMSE for the schemes in Table 1 without the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 23∘ 17∘ 40∘ 28∘ 17∘Variance of the RMSE 43∘ 11∘ 115∘ 41∘ 44∘
Tx Rx
Figure 6 Photo taken during the measurement campaigns of theoutdoor scenario pointing out the positions of the transmitter andof the antenna array based receiver
4 Experiments
In this section we validate our proposed drone trackingdevice with measurement campaigns in an outdoor scenarioIn Section 41 the setup for the measurement campaign isdescribed whereas in Section 42 we present the obtainedresults
41 Experimental Setup In Figure 6 we depict the outdoorscenario used for the measurement campaigns On the right-hand we placed our drone tracking device proposed inSection 3 as the receiver whereas on the left-hand thetransmitter is placed The transmitter is a 2x2 MIMO SDRplatformASPR4 [64] with frequencies ranging from 50MHzto 60 GHz a channel bandwidth varying from 200 kHz to 56MHz and a maximum power of 10 dBm at the output port
As shown in Figure 7 the distance between the transmit-ter and the receiver is 48 m Both transmitter and receiverare placed on tripods 115 cm above the ground Note that thered ldquoXrdquo in Figure 7 is the location from where the photo inFigure 6 has been taken
Both the transmitter and the receiver were set up usinga MSK message signal at 248 GHz carrier frequency and250 kbps of data rate Before starting the experiment the248 GHz frequency was scanned and no noise source wasdetected In order to verify that the receiver properly worksand measures the Bit Error Rate (BER) we have to decodethe signal To this purpose the transmitted package must beknown and consists of pseudo random sequences of length1024 bits and a header and footer with 16 bits each defined as0xFFFF and 0x0000 respectively Therefore the total size ofthe package is 1056 bits The transmitter uses both samplingfrequency and bandwidth of 2MHz At the receiver side a 4
MHz sampling frequency and 4 MHz bandwidth are usedEach captured frame at the receiver has 5120 samples
As shown in Figure 7 the transmitter is fixed and thereceiver rotates from +90∘ to minus90∘ in steps of 10∘ Accordingto Table 2 which presents the number of captured frame perDoA at each 10∘ step about 31 frames of size 5120 samples arecaptured
42 Experimental Results This subsection shows the perfor-mance of the DoA estimation schemes shown in Table 1During the measurement campaign the achieved Bit ErrorRate (BER) was 10minus4
Figure 8 shows the DoA calculated by rotating the basearray over the time Our proposed device works for a DoAranging from minus60∘ to 60∘ The DS Capon MUSIC ESPRITand Tensor combined with preprocessing schemes are shownin Figure 9(b)
In Tables 3 and 4 we present the Root Mean SquareError RMSE for the schemes in Table 1 with and without pre-processing schemes using the measurements from Figure 6respectively The equation for RMSE is given by
RMSE (1205791) = radic 1119876119876sum119902=1
(120579(119902)1 minus 120579(119902)1 )2 (29)where 119902 is one realization of a total of 119876 realizations foreach 10∘ stage of the measurement campaign In other wordsthe acquired data at each 10∘ degree step is reshaped intosmall matrices The computation of the DoA is individuallyperformed for each of these matrices In our experimentwe chose empirically matrices of size 4 times 1000 Since asshown in Table 2 at each 10∘ step 31 frames of size 5120samples are captured in average there are approximately 119876 =158matrices depending on the data reduction performed inSection 331 The variables 120579 and 120579 stand for the actual andthe estimated DoA respectively
Comparing Tables 3 and 4 we can note that except forthe Tensor the algorithms presented improvement in termsof RMSE after incorporating the preprocessing CAPON andthe Tensor increased the variance with the preprocessingThe smallest RMSE was achieved by the DS approach afterpreprocessing Note that the ESPRIT assumes the shiftinvariance property while both MUSIC and ESPRIT exploitthe property of the orthogonality between signal and noisesubspaces Note that both assumptions are approximationsand therefore their exploitation may cause additional errors
8 Wireless Communications and Mobile Computing
Table 4 RMSE for the schemes in Table 1 with the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 16∘ 17∘ 17∘ 19∘ 27∘
Variance of the RMSE 23∘ 25∘ 24∘ 18∘ 237∘
Table 5 Comparison between the obtained results and the DoA estimation in practical measurements results already available in theliterature
Drone detect solutions General DoA solutionsSolutions Proposed [25] [27] [20] [21] [22] [24] [15]DoA precision 19∘ 1∘ 1-3∘ 5∘ 1∘ 4∘ 05-2∘ 2∘Uses anechoic chamber No x x No Yes Yes Yes YesLow cost Yes No No Yes Yes Yes Yes Yes
In Table 5 we compare the DoA estimation resultsobtained with our framework and with the state-of-the-art approaches Furthermore we show that even withoutinvolving anechoic chamber in our tests precise results areobtained in comparison to references that implemented itstests in a nonreflexive environment The lsquoxrsquo means that thecommercial solutions did not provide such informationFinally we provide the information about which of thesolutions has low cost
As shown in Table 6 the total cost of the proposed dronetracking solution is US$ 2222 whereas the solutions in [25]and [27] cost US$ 226000 and US$ 120000 respectivelyTherefore our proposed off-the-shelf solution costs less than2 of the commercial solutions in [25 27]
5 Conclusions
In this paper we have proposed a low cost antenna arraybased drone tracking device for outdoor environments Theproposed solution is divided into hardware and softwareparts The hardware part of the proposed device is based onoff-the-shelf components such as an omnidirectional antennaarray a 4-channel SDR platform with carrier frequencyranging from 70MHz to 6 GHz a FPGAmotherboard and alaptop The software part includes algorithms for calibrationmodel order selection (MOS) andDoAestimation includingspecific preprocessing steps to increase the DoA accuracyWe have evaluated the performance of our proposed low costsolution in outdoor scenarios Our measurement campaignshave shown that when the array is in the front fire positionie with a DoA ranging from minus60∘ to 60∘ the maximumand the average DoA errors are 6∘ and 19∘ respectively Ourproposed off-the-shelf solution costs less than 2 of com-mercial solutions in [25 27] In order to further improve ouranalysis of the proposed system and our results experimentsin an anechoic chamber can be performed Moreover theperformance of the proposed framework can be improvedby incorporating interpolation schemes Perspectives alsoinclude the adoption of a more realistic noise model tosimplify the computation of the thresholds of the ExponentialFitting Test (EFT)
Appendix
A Proposed Extrapolation Algorithm toFind the EFT Thresholds for ExtremelyLow Probability of False Alarm
In this appendix we propose an extrapolation algorithm toestimate the thresholds of the EFT algorithm in cases that theProbability of False Alarm (Pfa) is extremely low
The EFT is based on the approximation that the profile ofthe ordered noise eigenvalues has an exponential behaviourThe profile 119886(119872119873) can be expressed as
119886 (119872119873)= radic 12 ( 151198722 + 2 minus radic 225(1198722 + 2)2 minus 180119872119873(1198722 minus 1) (1198722 + 2))
(A1)
Given that 119889 = 119872 minus 119875lowast our goal is to vary 119875 such thatwe find 119875lowast that 119872minus119875 ≪ 120582119872minus119875 where 119872minus119875 and 120582119872minus119875 standfor predicted (119872 minus 119875)th noise eigenvalue and119872 minus 119875 standsfor actual eigenvalue respectively Note that the EFT assumesthat smallest eigenvalue is a noise eigenvalue Therefore 119875varies from 1 to 119872 minus 1 Using (A1) [44] has derived thefollowing expression
119872minus119875 = (119875 + 1) sdot ( 1 minus 119886 (119875 + 1119873)1 minus 119886 (119875 + 1119873)119875+1) sdot 1205902 (A2)
1205902 = 1119875 + 1119873sum119894=0
120582119872minus119894 (A3)
where 1205902 is the estimated noise powerIn order to improve further the performance of the
EFT approach thresholds coefficients 120578119875 are computed usingnoise-only simulated data following Complex-Valued Circu-larly Symmetric Gaussian and identically and independently
Wireless Communications and Mobile Computing 9
Table 6 Price table for the hardware of the proposed drone tracker device
Hardware Cost (US$)AD-FMCOMMS5-EBZ-ND [33] 10804 times Dual-Band Antenna 24 amp 5GHz [36] 11ZYNQ 7000 Zc702 [35] 999Power Divider 24-6GHz 30Watts RoHS IP67 [41] 1095 times cable 305mm HPP100 SMA [42] 23Total 2222
Few small trees
Empty areawith sand floor
48 mTX
Met
al fe
nce
X
Several tall trees
Bushes
0∘
90∘
minus90∘
RX
Figure 7 Top view of the outdoor scenario for the measurement campaigns including the positions of the transmitter and of the antennaarray based receiver
Time (samples)0 100 200 300 400 500 600
DoA
DsCaponMusic
EspritExpectedTensor DS
minus100
100
minus80
80
minus60
60
minus40
40
minus20
20
0
Ang
les (
>A
LM
∘ )
Figure 8 Comparison between the DoA estimation schemes byvarying the DoA from +60∘ to minus60∘ with steps of 10∘
distributed (iid) as indicated in Section 2 Depending on the120578119875 we have two hypothesisH119875 1003816100381610038161003816100381610038161003816100381610038161003816
120582119872minus119875 minus 119872minus119875119872minus1198751003816100381610038161003816100381610038161003816100381610038161003816 le 120578119875 (A4)
H119875 1003816100381610038161003816100381610038161003816100381610038161003816120582119872minus119875 minus 119872minus119875119872minus119875
1003816100381610038161003816100381610038161003816100381610038161003816 gt 120578119875 (A5)
where H119875 120582119872minus119875 is a noise eigenvalue and H119875 120582119872minus119875 isa signal eigenvalue In order to have all 120578119875 depending of thePfa we can define the Pfa as
Pfa = Pr [d = 0 | d = 0] (A6)
Note that the 120578119875 thresholds are obtained by Monte Carlosimulations carried out in the only-noise scenario followingthe steps in [44] and by choosing the following amount ofrealizations
I = 10Pfa (A7)
10 Wireless Communications and Mobile Computing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(a) Without preprocessing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(b) With preprocessing
Figure 9 Comparison of the DoA estimation error between the DoA estimation schemes from Table 1 by varying the angle from minus90∘ to 90∘with steps of 10∘
Threshold
Prob
abili
ty o
f Fal
se A
larm
Linear ExtrapolationOriginal function
1 2
FIA10(pfa1)
FIA10(pfa2)
Figure 10 Log linear extrapolation based on two points given by Pfas and thresholds 120578119875Depending on the noise behaviour and the parameters
of the scenario [54 56] the thresholds can be extremelylowTherefore the computational complexity of (A7) can beprohibitive In order to overcome such limitation we proposean extrapolation approach to compute the thresholds forextremely low values of Pfa
Sincewewish to estimate values outside the known limitswe can use an extrapolation method and approximate thedescending side of the curve as a decreasing exponential Inorder to simplify the approximation we adopt a logarithmicscale as exemplified in Figure 10
Given the two known points in Figure 10 obtained byMonte Carlo simulations and given the linear extrapolation
in (A8) we can compute the two unknown constants a andb
Pfa = a sdot 120578P + b (A8)
The constants a and b are given by (A9) and (A10)by using the two known points (log10(Pfa1) 1205781) and(log10(Pfa2) 1205782)
119886 = log10 (Pfa2Pfa1)(1205782 minus 1205781) (A9)
119887 = log10 (Pfa2) minus 1205782 sdot ( log10 (Pfa2Pfa1)(1205782 minus 1205781) ) (A10)
Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

6 Wireless Communications and Mobile Computing
Table 1 Selected state-of-the-art DoA estimation schemes
Delay And Sum [38] 119875DS (120579) = w (120579)H Rxxw (120579)w (120579)H w (120579) (13)
Capon [39] 119875CAP(120579) = 1w (120579)H Rminus1xxw (120579) (14)
MUSIC [23] 119875M119880119878119868119862(120579) = 1wH (120579)VnVH
nw (120579) (15)ESPRIT [40]
Ψ = J1U+s J2Us (16)Ψ
EVD= EΦEH with Φ = diag [1206011 120601119889] (17)120583119894 = ang(120601119894) 119894 = 1 119889 (18)preprocessing step a matrix Z is returned and used by theDoA methods summarized in Table 1
In Table 1 the vector w(120579) in (13) (14) and (15) varyaccording to the candidate values of 120579 The value of 120579 thatmaximizes the expression in (13) (14) and (15) is the 1205791since in Section 2 the data model assumes that the LoScomponent faces no obstacles Therefore the componentcorresponding to the greatest power should be the samecomponent with DoA equal to 1205791 Us isin C119872times119889 is signalsubspace which is equal to the 119889 eigenvectors correspondingto the 119889 greatest eigenvalues whereasVn isin C119872times119872minus119889 is a basisfor the noise subspace composed by the119872minus 119889 eigenvectorsassociated with to the 119872 minus 119889 smallest eigenvalues In (17)and (18) Φ is the diagonal matrix that has the eigenvaluesof Ψ We compute all the spatial frequencies and the onewhose component has the greatest power is the 1205831 that canbe mapped to 120579134 Tensor-Based DoA Estimation In this subsection atensor factorization namely the PARAFAC decompositionis applied The PARAFAC decomposition generates threefactor matrices from a received tensor X whose structureis detailed in this subsection One factor matrix correspondsto the estimate of the steering matrix A containing DoAinformation In this subsection A is extracted from tensorXto estimate the DoA of the impinging signal
We first consider an unchanging sequence of 119873 symbolstransmitted periodically Such symbols can be found in aheader or footer or even in the payload of a message Alter-natively repeating sequences of symbols can be extractedfrom time periods when no data is being transmitted butthe carrier of the transmitter is active An example is givenas follows Since the oscillators at the transmitter and atthe receiver are never exactly the same a small frequencydeviation or constant phase change is observed at the receiverAt an MSK receiver if the deviation is positive a sequenceof ones can be extracted and if the deviation is negative asequence of zeros is observed
The symbols corresponding to the sequence from the 119894-thsource is represented by the vector c119894 isin C119873times1 Accordinglywe can build a received signal matrix
X119894 (119901) = 120574119894 (119901) a119894 (120583119894) cT119894 isin C119872times119873 (19)
where 119901 is the period corresponding to the sequence trans-mission Generalizing for 119889 signals we find
X (119901) = AD120574 (119901)CT isin C119872times119873 (20)where D120574(119901) = diag([1205741(119901) 1205742(119901) 120574119889(119901)] )T and C =[c1 c2 c119889]
For 119875 transmitted sequences the symbols can be concate-nated along the third dimension to form the received signaltensor
X = [X (1) ⊔3 X (2) ⊔3 ⊔3 X (119875)]isin C119872times119873times119875 (21)
where ⊔3 represents concatenation along the third dimen-sion Since the slices of X can be written as (20) X has aPARAFAC structure and can be decomposed into three factormatrices AC and Γ where Γ contains the diagonals ofD120574(119901)along its rows To factorize X we first rewrite it in threedifferent matrix representations or unfoldings
X(1) = A (C Γ)T (22)X(2) = C (Γ A)T (23)X(3) = Γ (A C)T (24)
where is the Khatri-Rao (column-wise Kroenecker) prod-uct
It is known that minimizing (22) (23) and (24) in theleast squares sense [62] leads to the following solutions
A =X(1) [(C Γ)T]+ (25)Γ =X(2) [(Γ A)T]+ (26)C =X(3) [(A C)T]+ (27)
We consider the well-known Alternating Least Squares(ALS) algorithm to solve (25) (26) and (27) in an iterativeway Since C is known the estimation step (27) is skippedand the ALS algorithm alternates between the estimations ofA and Γ in a two-step approach [63]
Once convergence is achieved we use A to extract theDoA of the 119894-th source as follows
120579119894 = argmax120579
aH119894 (120579) a119894 (28)
Wireless Communications and Mobile Computing 7
Table 2 Number of frames captured at each 10∘ step of the measurement campaign
DoA minus90∘ minus80∘ minus70∘ minus60∘ minus50∘ minus40∘ minus30∘ minus20∘ minus10∘ 0∘ 10∘ 20∘ 30∘ 40∘ 50∘ 60∘ 70∘ 80∘ 90∘Frames 31 29 29 30 33 34 32 29 24 30 32 24 30 33 26 31 43 41 31
Table 3 RMSE for the schemes in Table 1 without the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 23∘ 17∘ 40∘ 28∘ 17∘Variance of the RMSE 43∘ 11∘ 115∘ 41∘ 44∘
Tx Rx
Figure 6 Photo taken during the measurement campaigns of theoutdoor scenario pointing out the positions of the transmitter andof the antenna array based receiver
4 Experiments
In this section we validate our proposed drone trackingdevice with measurement campaigns in an outdoor scenarioIn Section 41 the setup for the measurement campaign isdescribed whereas in Section 42 we present the obtainedresults
41 Experimental Setup In Figure 6 we depict the outdoorscenario used for the measurement campaigns On the right-hand we placed our drone tracking device proposed inSection 3 as the receiver whereas on the left-hand thetransmitter is placed The transmitter is a 2x2 MIMO SDRplatformASPR4 [64] with frequencies ranging from 50MHzto 60 GHz a channel bandwidth varying from 200 kHz to 56MHz and a maximum power of 10 dBm at the output port
As shown in Figure 7 the distance between the transmit-ter and the receiver is 48 m Both transmitter and receiverare placed on tripods 115 cm above the ground Note that thered ldquoXrdquo in Figure 7 is the location from where the photo inFigure 6 has been taken
Both the transmitter and the receiver were set up usinga MSK message signal at 248 GHz carrier frequency and250 kbps of data rate Before starting the experiment the248 GHz frequency was scanned and no noise source wasdetected In order to verify that the receiver properly worksand measures the Bit Error Rate (BER) we have to decodethe signal To this purpose the transmitted package must beknown and consists of pseudo random sequences of length1024 bits and a header and footer with 16 bits each defined as0xFFFF and 0x0000 respectively Therefore the total size ofthe package is 1056 bits The transmitter uses both samplingfrequency and bandwidth of 2MHz At the receiver side a 4
MHz sampling frequency and 4 MHz bandwidth are usedEach captured frame at the receiver has 5120 samples
As shown in Figure 7 the transmitter is fixed and thereceiver rotates from +90∘ to minus90∘ in steps of 10∘ Accordingto Table 2 which presents the number of captured frame perDoA at each 10∘ step about 31 frames of size 5120 samples arecaptured
42 Experimental Results This subsection shows the perfor-mance of the DoA estimation schemes shown in Table 1During the measurement campaign the achieved Bit ErrorRate (BER) was 10minus4
Figure 8 shows the DoA calculated by rotating the basearray over the time Our proposed device works for a DoAranging from minus60∘ to 60∘ The DS Capon MUSIC ESPRITand Tensor combined with preprocessing schemes are shownin Figure 9(b)
In Tables 3 and 4 we present the Root Mean SquareError RMSE for the schemes in Table 1 with and without pre-processing schemes using the measurements from Figure 6respectively The equation for RMSE is given by
RMSE (1205791) = radic 1119876119876sum119902=1
(120579(119902)1 minus 120579(119902)1 )2 (29)where 119902 is one realization of a total of 119876 realizations foreach 10∘ stage of the measurement campaign In other wordsthe acquired data at each 10∘ degree step is reshaped intosmall matrices The computation of the DoA is individuallyperformed for each of these matrices In our experimentwe chose empirically matrices of size 4 times 1000 Since asshown in Table 2 at each 10∘ step 31 frames of size 5120samples are captured in average there are approximately 119876 =158matrices depending on the data reduction performed inSection 331 The variables 120579 and 120579 stand for the actual andthe estimated DoA respectively
Comparing Tables 3 and 4 we can note that except forthe Tensor the algorithms presented improvement in termsof RMSE after incorporating the preprocessing CAPON andthe Tensor increased the variance with the preprocessingThe smallest RMSE was achieved by the DS approach afterpreprocessing Note that the ESPRIT assumes the shiftinvariance property while both MUSIC and ESPRIT exploitthe property of the orthogonality between signal and noisesubspaces Note that both assumptions are approximationsand therefore their exploitation may cause additional errors
8 Wireless Communications and Mobile Computing
Table 4 RMSE for the schemes in Table 1 with the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 16∘ 17∘ 17∘ 19∘ 27∘
Variance of the RMSE 23∘ 25∘ 24∘ 18∘ 237∘
Table 5 Comparison between the obtained results and the DoA estimation in practical measurements results already available in theliterature
Drone detect solutions General DoA solutionsSolutions Proposed [25] [27] [20] [21] [22] [24] [15]DoA precision 19∘ 1∘ 1-3∘ 5∘ 1∘ 4∘ 05-2∘ 2∘Uses anechoic chamber No x x No Yes Yes Yes YesLow cost Yes No No Yes Yes Yes Yes Yes
In Table 5 we compare the DoA estimation resultsobtained with our framework and with the state-of-the-art approaches Furthermore we show that even withoutinvolving anechoic chamber in our tests precise results areobtained in comparison to references that implemented itstests in a nonreflexive environment The lsquoxrsquo means that thecommercial solutions did not provide such informationFinally we provide the information about which of thesolutions has low cost
As shown in Table 6 the total cost of the proposed dronetracking solution is US$ 2222 whereas the solutions in [25]and [27] cost US$ 226000 and US$ 120000 respectivelyTherefore our proposed off-the-shelf solution costs less than2 of the commercial solutions in [25 27]
5 Conclusions
In this paper we have proposed a low cost antenna arraybased drone tracking device for outdoor environments Theproposed solution is divided into hardware and softwareparts The hardware part of the proposed device is based onoff-the-shelf components such as an omnidirectional antennaarray a 4-channel SDR platform with carrier frequencyranging from 70MHz to 6 GHz a FPGAmotherboard and alaptop The software part includes algorithms for calibrationmodel order selection (MOS) andDoAestimation includingspecific preprocessing steps to increase the DoA accuracyWe have evaluated the performance of our proposed low costsolution in outdoor scenarios Our measurement campaignshave shown that when the array is in the front fire positionie with a DoA ranging from minus60∘ to 60∘ the maximumand the average DoA errors are 6∘ and 19∘ respectively Ourproposed off-the-shelf solution costs less than 2 of com-mercial solutions in [25 27] In order to further improve ouranalysis of the proposed system and our results experimentsin an anechoic chamber can be performed Moreover theperformance of the proposed framework can be improvedby incorporating interpolation schemes Perspectives alsoinclude the adoption of a more realistic noise model tosimplify the computation of the thresholds of the ExponentialFitting Test (EFT)
Appendix
A Proposed Extrapolation Algorithm toFind the EFT Thresholds for ExtremelyLow Probability of False Alarm
In this appendix we propose an extrapolation algorithm toestimate the thresholds of the EFT algorithm in cases that theProbability of False Alarm (Pfa) is extremely low
The EFT is based on the approximation that the profile ofthe ordered noise eigenvalues has an exponential behaviourThe profile 119886(119872119873) can be expressed as
119886 (119872119873)= radic 12 ( 151198722 + 2 minus radic 225(1198722 + 2)2 minus 180119872119873(1198722 minus 1) (1198722 + 2))
(A1)
Given that 119889 = 119872 minus 119875lowast our goal is to vary 119875 such thatwe find 119875lowast that 119872minus119875 ≪ 120582119872minus119875 where 119872minus119875 and 120582119872minus119875 standfor predicted (119872 minus 119875)th noise eigenvalue and119872 minus 119875 standsfor actual eigenvalue respectively Note that the EFT assumesthat smallest eigenvalue is a noise eigenvalue Therefore 119875varies from 1 to 119872 minus 1 Using (A1) [44] has derived thefollowing expression
119872minus119875 = (119875 + 1) sdot ( 1 minus 119886 (119875 + 1119873)1 minus 119886 (119875 + 1119873)119875+1) sdot 1205902 (A2)
1205902 = 1119875 + 1119873sum119894=0
120582119872minus119894 (A3)
where 1205902 is the estimated noise powerIn order to improve further the performance of the
EFT approach thresholds coefficients 120578119875 are computed usingnoise-only simulated data following Complex-Valued Circu-larly Symmetric Gaussian and identically and independently
Wireless Communications and Mobile Computing 9
Table 6 Price table for the hardware of the proposed drone tracker device
Hardware Cost (US$)AD-FMCOMMS5-EBZ-ND [33] 10804 times Dual-Band Antenna 24 amp 5GHz [36] 11ZYNQ 7000 Zc702 [35] 999Power Divider 24-6GHz 30Watts RoHS IP67 [41] 1095 times cable 305mm HPP100 SMA [42] 23Total 2222
Few small trees
Empty areawith sand floor
48 mTX
Met
al fe
nce
X
Several tall trees
Bushes
0∘
90∘
minus90∘
RX
Figure 7 Top view of the outdoor scenario for the measurement campaigns including the positions of the transmitter and of the antennaarray based receiver
Time (samples)0 100 200 300 400 500 600
DoA
DsCaponMusic
EspritExpectedTensor DS
minus100
100
minus80
80
minus60
60
minus40
40
minus20
20
0
Ang
les (
>A
LM
∘ )
Figure 8 Comparison between the DoA estimation schemes byvarying the DoA from +60∘ to minus60∘ with steps of 10∘
distributed (iid) as indicated in Section 2 Depending on the120578119875 we have two hypothesisH119875 1003816100381610038161003816100381610038161003816100381610038161003816
120582119872minus119875 minus 119872minus119875119872minus1198751003816100381610038161003816100381610038161003816100381610038161003816 le 120578119875 (A4)
H119875 1003816100381610038161003816100381610038161003816100381610038161003816120582119872minus119875 minus 119872minus119875119872minus119875
1003816100381610038161003816100381610038161003816100381610038161003816 gt 120578119875 (A5)
where H119875 120582119872minus119875 is a noise eigenvalue and H119875 120582119872minus119875 isa signal eigenvalue In order to have all 120578119875 depending of thePfa we can define the Pfa as
Pfa = Pr [d = 0 | d = 0] (A6)
Note that the 120578119875 thresholds are obtained by Monte Carlosimulations carried out in the only-noise scenario followingthe steps in [44] and by choosing the following amount ofrealizations
I = 10Pfa (A7)
10 Wireless Communications and Mobile Computing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(a) Without preprocessing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(b) With preprocessing
Figure 9 Comparison of the DoA estimation error between the DoA estimation schemes from Table 1 by varying the angle from minus90∘ to 90∘with steps of 10∘
Threshold
Prob
abili
ty o
f Fal
se A
larm
Linear ExtrapolationOriginal function
1 2
FIA10(pfa1)
FIA10(pfa2)
Figure 10 Log linear extrapolation based on two points given by Pfas and thresholds 120578119875Depending on the noise behaviour and the parameters
of the scenario [54 56] the thresholds can be extremelylowTherefore the computational complexity of (A7) can beprohibitive In order to overcome such limitation we proposean extrapolation approach to compute the thresholds forextremely low values of Pfa
Sincewewish to estimate values outside the known limitswe can use an extrapolation method and approximate thedescending side of the curve as a decreasing exponential Inorder to simplify the approximation we adopt a logarithmicscale as exemplified in Figure 10
Given the two known points in Figure 10 obtained byMonte Carlo simulations and given the linear extrapolation
in (A8) we can compute the two unknown constants a andb
Pfa = a sdot 120578P + b (A8)
The constants a and b are given by (A9) and (A10)by using the two known points (log10(Pfa1) 1205781) and(log10(Pfa2) 1205782)
119886 = log10 (Pfa2Pfa1)(1205782 minus 1205781) (A9)
119887 = log10 (Pfa2) minus 1205782 sdot ( log10 (Pfa2Pfa1)(1205782 minus 1205781) ) (A10)
Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Wireless Communications and Mobile Computing 7
Table 2 Number of frames captured at each 10∘ step of the measurement campaign
DoA minus90∘ minus80∘ minus70∘ minus60∘ minus50∘ minus40∘ minus30∘ minus20∘ minus10∘ 0∘ 10∘ 20∘ 30∘ 40∘ 50∘ 60∘ 70∘ 80∘ 90∘Frames 31 29 29 30 33 34 32 29 24 30 32 24 30 33 26 31 43 41 31
Table 3 RMSE for the schemes in Table 1 without the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 23∘ 17∘ 40∘ 28∘ 17∘Variance of the RMSE 43∘ 11∘ 115∘ 41∘ 44∘
Tx Rx
Figure 6 Photo taken during the measurement campaigns of theoutdoor scenario pointing out the positions of the transmitter andof the antenna array based receiver
4 Experiments
In this section we validate our proposed drone trackingdevice with measurement campaigns in an outdoor scenarioIn Section 41 the setup for the measurement campaign isdescribed whereas in Section 42 we present the obtainedresults
41 Experimental Setup In Figure 6 we depict the outdoorscenario used for the measurement campaigns On the right-hand we placed our drone tracking device proposed inSection 3 as the receiver whereas on the left-hand thetransmitter is placed The transmitter is a 2x2 MIMO SDRplatformASPR4 [64] with frequencies ranging from 50MHzto 60 GHz a channel bandwidth varying from 200 kHz to 56MHz and a maximum power of 10 dBm at the output port
As shown in Figure 7 the distance between the transmit-ter and the receiver is 48 m Both transmitter and receiverare placed on tripods 115 cm above the ground Note that thered ldquoXrdquo in Figure 7 is the location from where the photo inFigure 6 has been taken
Both the transmitter and the receiver were set up usinga MSK message signal at 248 GHz carrier frequency and250 kbps of data rate Before starting the experiment the248 GHz frequency was scanned and no noise source wasdetected In order to verify that the receiver properly worksand measures the Bit Error Rate (BER) we have to decodethe signal To this purpose the transmitted package must beknown and consists of pseudo random sequences of length1024 bits and a header and footer with 16 bits each defined as0xFFFF and 0x0000 respectively Therefore the total size ofthe package is 1056 bits The transmitter uses both samplingfrequency and bandwidth of 2MHz At the receiver side a 4
MHz sampling frequency and 4 MHz bandwidth are usedEach captured frame at the receiver has 5120 samples
As shown in Figure 7 the transmitter is fixed and thereceiver rotates from +90∘ to minus90∘ in steps of 10∘ Accordingto Table 2 which presents the number of captured frame perDoA at each 10∘ step about 31 frames of size 5120 samples arecaptured
42 Experimental Results This subsection shows the perfor-mance of the DoA estimation schemes shown in Table 1During the measurement campaign the achieved Bit ErrorRate (BER) was 10minus4
Figure 8 shows the DoA calculated by rotating the basearray over the time Our proposed device works for a DoAranging from minus60∘ to 60∘ The DS Capon MUSIC ESPRITand Tensor combined with preprocessing schemes are shownin Figure 9(b)
In Tables 3 and 4 we present the Root Mean SquareError RMSE for the schemes in Table 1 with and without pre-processing schemes using the measurements from Figure 6respectively The equation for RMSE is given by
RMSE (1205791) = radic 1119876119876sum119902=1
(120579(119902)1 minus 120579(119902)1 )2 (29)where 119902 is one realization of a total of 119876 realizations foreach 10∘ stage of the measurement campaign In other wordsthe acquired data at each 10∘ degree step is reshaped intosmall matrices The computation of the DoA is individuallyperformed for each of these matrices In our experimentwe chose empirically matrices of size 4 times 1000 Since asshown in Table 2 at each 10∘ step 31 frames of size 5120samples are captured in average there are approximately 119876 =158matrices depending on the data reduction performed inSection 331 The variables 120579 and 120579 stand for the actual andthe estimated DoA respectively
Comparing Tables 3 and 4 we can note that except forthe Tensor the algorithms presented improvement in termsof RMSE after incorporating the preprocessing CAPON andthe Tensor increased the variance with the preprocessingThe smallest RMSE was achieved by the DS approach afterpreprocessing Note that the ESPRIT assumes the shiftinvariance property while both MUSIC and ESPRIT exploitthe property of the orthogonality between signal and noisesubspaces Note that both assumptions are approximationsand therefore their exploitation may cause additional errors
8 Wireless Communications and Mobile Computing
Table 4 RMSE for the schemes in Table 1 with the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 16∘ 17∘ 17∘ 19∘ 27∘
Variance of the RMSE 23∘ 25∘ 24∘ 18∘ 237∘
Table 5 Comparison between the obtained results and the DoA estimation in practical measurements results already available in theliterature
Drone detect solutions General DoA solutionsSolutions Proposed [25] [27] [20] [21] [22] [24] [15]DoA precision 19∘ 1∘ 1-3∘ 5∘ 1∘ 4∘ 05-2∘ 2∘Uses anechoic chamber No x x No Yes Yes Yes YesLow cost Yes No No Yes Yes Yes Yes Yes
In Table 5 we compare the DoA estimation resultsobtained with our framework and with the state-of-the-art approaches Furthermore we show that even withoutinvolving anechoic chamber in our tests precise results areobtained in comparison to references that implemented itstests in a nonreflexive environment The lsquoxrsquo means that thecommercial solutions did not provide such informationFinally we provide the information about which of thesolutions has low cost
As shown in Table 6 the total cost of the proposed dronetracking solution is US$ 2222 whereas the solutions in [25]and [27] cost US$ 226000 and US$ 120000 respectivelyTherefore our proposed off-the-shelf solution costs less than2 of the commercial solutions in [25 27]
5 Conclusions
In this paper we have proposed a low cost antenna arraybased drone tracking device for outdoor environments Theproposed solution is divided into hardware and softwareparts The hardware part of the proposed device is based onoff-the-shelf components such as an omnidirectional antennaarray a 4-channel SDR platform with carrier frequencyranging from 70MHz to 6 GHz a FPGAmotherboard and alaptop The software part includes algorithms for calibrationmodel order selection (MOS) andDoAestimation includingspecific preprocessing steps to increase the DoA accuracyWe have evaluated the performance of our proposed low costsolution in outdoor scenarios Our measurement campaignshave shown that when the array is in the front fire positionie with a DoA ranging from minus60∘ to 60∘ the maximumand the average DoA errors are 6∘ and 19∘ respectively Ourproposed off-the-shelf solution costs less than 2 of com-mercial solutions in [25 27] In order to further improve ouranalysis of the proposed system and our results experimentsin an anechoic chamber can be performed Moreover theperformance of the proposed framework can be improvedby incorporating interpolation schemes Perspectives alsoinclude the adoption of a more realistic noise model tosimplify the computation of the thresholds of the ExponentialFitting Test (EFT)
Appendix
A Proposed Extrapolation Algorithm toFind the EFT Thresholds for ExtremelyLow Probability of False Alarm
In this appendix we propose an extrapolation algorithm toestimate the thresholds of the EFT algorithm in cases that theProbability of False Alarm (Pfa) is extremely low
The EFT is based on the approximation that the profile ofthe ordered noise eigenvalues has an exponential behaviourThe profile 119886(119872119873) can be expressed as
119886 (119872119873)= radic 12 ( 151198722 + 2 minus radic 225(1198722 + 2)2 minus 180119872119873(1198722 minus 1) (1198722 + 2))
(A1)
Given that 119889 = 119872 minus 119875lowast our goal is to vary 119875 such thatwe find 119875lowast that 119872minus119875 ≪ 120582119872minus119875 where 119872minus119875 and 120582119872minus119875 standfor predicted (119872 minus 119875)th noise eigenvalue and119872 minus 119875 standsfor actual eigenvalue respectively Note that the EFT assumesthat smallest eigenvalue is a noise eigenvalue Therefore 119875varies from 1 to 119872 minus 1 Using (A1) [44] has derived thefollowing expression
119872minus119875 = (119875 + 1) sdot ( 1 minus 119886 (119875 + 1119873)1 minus 119886 (119875 + 1119873)119875+1) sdot 1205902 (A2)
1205902 = 1119875 + 1119873sum119894=0
120582119872minus119894 (A3)
where 1205902 is the estimated noise powerIn order to improve further the performance of the
EFT approach thresholds coefficients 120578119875 are computed usingnoise-only simulated data following Complex-Valued Circu-larly Symmetric Gaussian and identically and independently
Wireless Communications and Mobile Computing 9
Table 6 Price table for the hardware of the proposed drone tracker device
Hardware Cost (US$)AD-FMCOMMS5-EBZ-ND [33] 10804 times Dual-Band Antenna 24 amp 5GHz [36] 11ZYNQ 7000 Zc702 [35] 999Power Divider 24-6GHz 30Watts RoHS IP67 [41] 1095 times cable 305mm HPP100 SMA [42] 23Total 2222
Few small trees
Empty areawith sand floor
48 mTX
Met
al fe
nce
X
Several tall trees
Bushes
0∘
90∘
minus90∘
RX
Figure 7 Top view of the outdoor scenario for the measurement campaigns including the positions of the transmitter and of the antennaarray based receiver
Time (samples)0 100 200 300 400 500 600
DoA
DsCaponMusic
EspritExpectedTensor DS
minus100
100
minus80
80
minus60
60
minus40
40
minus20
20
0
Ang
les (
>A
LM
∘ )
Figure 8 Comparison between the DoA estimation schemes byvarying the DoA from +60∘ to minus60∘ with steps of 10∘
distributed (iid) as indicated in Section 2 Depending on the120578119875 we have two hypothesisH119875 1003816100381610038161003816100381610038161003816100381610038161003816
120582119872minus119875 minus 119872minus119875119872minus1198751003816100381610038161003816100381610038161003816100381610038161003816 le 120578119875 (A4)
H119875 1003816100381610038161003816100381610038161003816100381610038161003816120582119872minus119875 minus 119872minus119875119872minus119875
1003816100381610038161003816100381610038161003816100381610038161003816 gt 120578119875 (A5)
where H119875 120582119872minus119875 is a noise eigenvalue and H119875 120582119872minus119875 isa signal eigenvalue In order to have all 120578119875 depending of thePfa we can define the Pfa as
Pfa = Pr [d = 0 | d = 0] (A6)
Note that the 120578119875 thresholds are obtained by Monte Carlosimulations carried out in the only-noise scenario followingthe steps in [44] and by choosing the following amount ofrealizations
I = 10Pfa (A7)
10 Wireless Communications and Mobile Computing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(a) Without preprocessing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(b) With preprocessing
Figure 9 Comparison of the DoA estimation error between the DoA estimation schemes from Table 1 by varying the angle from minus90∘ to 90∘with steps of 10∘
Threshold
Prob
abili
ty o
f Fal
se A
larm
Linear ExtrapolationOriginal function
1 2
FIA10(pfa1)
FIA10(pfa2)
Figure 10 Log linear extrapolation based on two points given by Pfas and thresholds 120578119875Depending on the noise behaviour and the parameters
of the scenario [54 56] the thresholds can be extremelylowTherefore the computational complexity of (A7) can beprohibitive In order to overcome such limitation we proposean extrapolation approach to compute the thresholds forextremely low values of Pfa
Sincewewish to estimate values outside the known limitswe can use an extrapolation method and approximate thedescending side of the curve as a decreasing exponential Inorder to simplify the approximation we adopt a logarithmicscale as exemplified in Figure 10
Given the two known points in Figure 10 obtained byMonte Carlo simulations and given the linear extrapolation
in (A8) we can compute the two unknown constants a andb
Pfa = a sdot 120578P + b (A8)
The constants a and b are given by (A9) and (A10)by using the two known points (log10(Pfa1) 1205781) and(log10(Pfa2) 1205782)
119886 = log10 (Pfa2Pfa1)(1205782 minus 1205781) (A9)
119887 = log10 (Pfa2) minus 1205782 sdot ( log10 (Pfa2Pfa1)(1205782 minus 1205781) ) (A10)
Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

8 Wireless Communications and Mobile Computing
Table 4 RMSE for the schemes in Table 1 with the preprocessing using the measurements from Figure 8
Algorithm DS CAP MUS ESP TENRMSE 16∘ 17∘ 17∘ 19∘ 27∘
Variance of the RMSE 23∘ 25∘ 24∘ 18∘ 237∘
Table 5 Comparison between the obtained results and the DoA estimation in practical measurements results already available in theliterature
Drone detect solutions General DoA solutionsSolutions Proposed [25] [27] [20] [21] [22] [24] [15]DoA precision 19∘ 1∘ 1-3∘ 5∘ 1∘ 4∘ 05-2∘ 2∘Uses anechoic chamber No x x No Yes Yes Yes YesLow cost Yes No No Yes Yes Yes Yes Yes
In Table 5 we compare the DoA estimation resultsobtained with our framework and with the state-of-the-art approaches Furthermore we show that even withoutinvolving anechoic chamber in our tests precise results areobtained in comparison to references that implemented itstests in a nonreflexive environment The lsquoxrsquo means that thecommercial solutions did not provide such informationFinally we provide the information about which of thesolutions has low cost
As shown in Table 6 the total cost of the proposed dronetracking solution is US$ 2222 whereas the solutions in [25]and [27] cost US$ 226000 and US$ 120000 respectivelyTherefore our proposed off-the-shelf solution costs less than2 of the commercial solutions in [25 27]
5 Conclusions
In this paper we have proposed a low cost antenna arraybased drone tracking device for outdoor environments Theproposed solution is divided into hardware and softwareparts The hardware part of the proposed device is based onoff-the-shelf components such as an omnidirectional antennaarray a 4-channel SDR platform with carrier frequencyranging from 70MHz to 6 GHz a FPGAmotherboard and alaptop The software part includes algorithms for calibrationmodel order selection (MOS) andDoAestimation includingspecific preprocessing steps to increase the DoA accuracyWe have evaluated the performance of our proposed low costsolution in outdoor scenarios Our measurement campaignshave shown that when the array is in the front fire positionie with a DoA ranging from minus60∘ to 60∘ the maximumand the average DoA errors are 6∘ and 19∘ respectively Ourproposed off-the-shelf solution costs less than 2 of com-mercial solutions in [25 27] In order to further improve ouranalysis of the proposed system and our results experimentsin an anechoic chamber can be performed Moreover theperformance of the proposed framework can be improvedby incorporating interpolation schemes Perspectives alsoinclude the adoption of a more realistic noise model tosimplify the computation of the thresholds of the ExponentialFitting Test (EFT)
Appendix
A Proposed Extrapolation Algorithm toFind the EFT Thresholds for ExtremelyLow Probability of False Alarm
In this appendix we propose an extrapolation algorithm toestimate the thresholds of the EFT algorithm in cases that theProbability of False Alarm (Pfa) is extremely low
The EFT is based on the approximation that the profile ofthe ordered noise eigenvalues has an exponential behaviourThe profile 119886(119872119873) can be expressed as
119886 (119872119873)= radic 12 ( 151198722 + 2 minus radic 225(1198722 + 2)2 minus 180119872119873(1198722 minus 1) (1198722 + 2))
(A1)
Given that 119889 = 119872 minus 119875lowast our goal is to vary 119875 such thatwe find 119875lowast that 119872minus119875 ≪ 120582119872minus119875 where 119872minus119875 and 120582119872minus119875 standfor predicted (119872 minus 119875)th noise eigenvalue and119872 minus 119875 standsfor actual eigenvalue respectively Note that the EFT assumesthat smallest eigenvalue is a noise eigenvalue Therefore 119875varies from 1 to 119872 minus 1 Using (A1) [44] has derived thefollowing expression
119872minus119875 = (119875 + 1) sdot ( 1 minus 119886 (119875 + 1119873)1 minus 119886 (119875 + 1119873)119875+1) sdot 1205902 (A2)
1205902 = 1119875 + 1119873sum119894=0
120582119872minus119894 (A3)
where 1205902 is the estimated noise powerIn order to improve further the performance of the
EFT approach thresholds coefficients 120578119875 are computed usingnoise-only simulated data following Complex-Valued Circu-larly Symmetric Gaussian and identically and independently
Wireless Communications and Mobile Computing 9
Table 6 Price table for the hardware of the proposed drone tracker device
Hardware Cost (US$)AD-FMCOMMS5-EBZ-ND [33] 10804 times Dual-Band Antenna 24 amp 5GHz [36] 11ZYNQ 7000 Zc702 [35] 999Power Divider 24-6GHz 30Watts RoHS IP67 [41] 1095 times cable 305mm HPP100 SMA [42] 23Total 2222
Few small trees
Empty areawith sand floor
48 mTX
Met
al fe
nce
X
Several tall trees
Bushes
0∘
90∘
minus90∘
RX
Figure 7 Top view of the outdoor scenario for the measurement campaigns including the positions of the transmitter and of the antennaarray based receiver
Time (samples)0 100 200 300 400 500 600
DoA
DsCaponMusic
EspritExpectedTensor DS
minus100
100
minus80
80
minus60
60
minus40
40
minus20
20
0
Ang
les (
>A
LM
∘ )
Figure 8 Comparison between the DoA estimation schemes byvarying the DoA from +60∘ to minus60∘ with steps of 10∘
distributed (iid) as indicated in Section 2 Depending on the120578119875 we have two hypothesisH119875 1003816100381610038161003816100381610038161003816100381610038161003816
120582119872minus119875 minus 119872minus119875119872minus1198751003816100381610038161003816100381610038161003816100381610038161003816 le 120578119875 (A4)
H119875 1003816100381610038161003816100381610038161003816100381610038161003816120582119872minus119875 minus 119872minus119875119872minus119875
1003816100381610038161003816100381610038161003816100381610038161003816 gt 120578119875 (A5)
where H119875 120582119872minus119875 is a noise eigenvalue and H119875 120582119872minus119875 isa signal eigenvalue In order to have all 120578119875 depending of thePfa we can define the Pfa as
Pfa = Pr [d = 0 | d = 0] (A6)
Note that the 120578119875 thresholds are obtained by Monte Carlosimulations carried out in the only-noise scenario followingthe steps in [44] and by choosing the following amount ofrealizations
I = 10Pfa (A7)
10 Wireless Communications and Mobile Computing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(a) Without preprocessing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(b) With preprocessing
Figure 9 Comparison of the DoA estimation error between the DoA estimation schemes from Table 1 by varying the angle from minus90∘ to 90∘with steps of 10∘
Threshold
Prob
abili
ty o
f Fal
se A
larm
Linear ExtrapolationOriginal function
1 2
FIA10(pfa1)
FIA10(pfa2)
Figure 10 Log linear extrapolation based on two points given by Pfas and thresholds 120578119875Depending on the noise behaviour and the parameters
of the scenario [54 56] the thresholds can be extremelylowTherefore the computational complexity of (A7) can beprohibitive In order to overcome such limitation we proposean extrapolation approach to compute the thresholds forextremely low values of Pfa
Sincewewish to estimate values outside the known limitswe can use an extrapolation method and approximate thedescending side of the curve as a decreasing exponential Inorder to simplify the approximation we adopt a logarithmicscale as exemplified in Figure 10
Given the two known points in Figure 10 obtained byMonte Carlo simulations and given the linear extrapolation
in (A8) we can compute the two unknown constants a andb
Pfa = a sdot 120578P + b (A8)
The constants a and b are given by (A9) and (A10)by using the two known points (log10(Pfa1) 1205781) and(log10(Pfa2) 1205782)
119886 = log10 (Pfa2Pfa1)(1205782 minus 1205781) (A9)
119887 = log10 (Pfa2) minus 1205782 sdot ( log10 (Pfa2Pfa1)(1205782 minus 1205781) ) (A10)
Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom
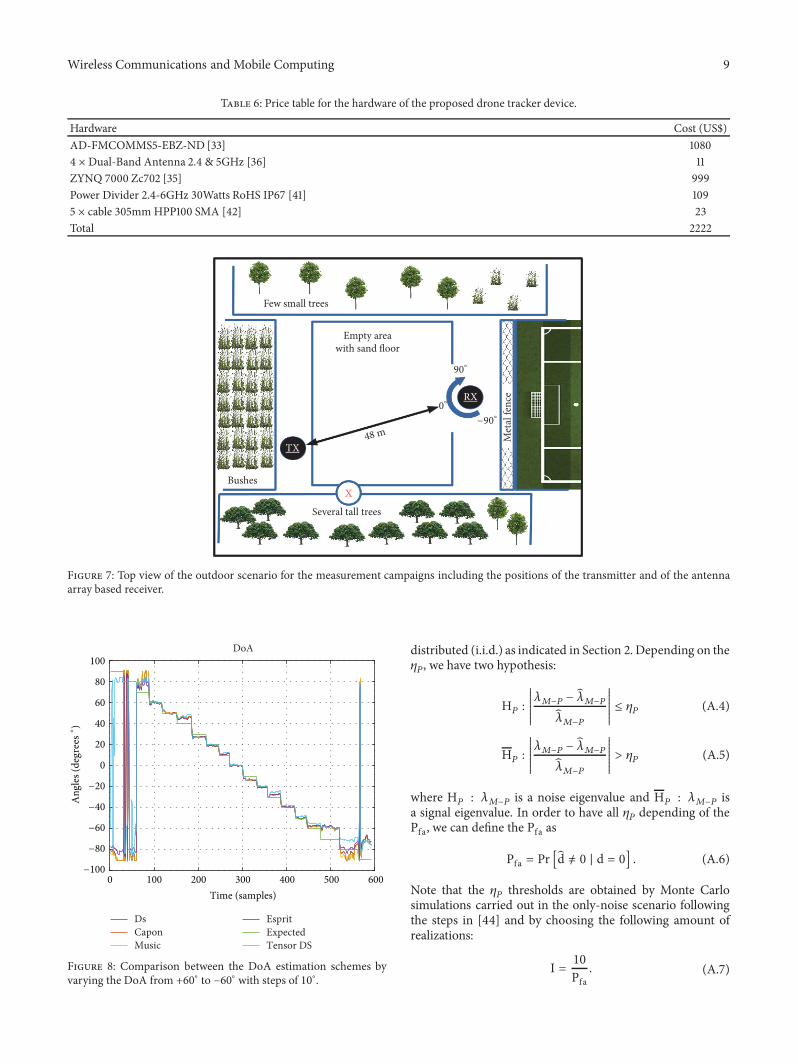
Wireless Communications and Mobile Computing 9
Table 6 Price table for the hardware of the proposed drone tracker device
Hardware Cost (US$)AD-FMCOMMS5-EBZ-ND [33] 10804 times Dual-Band Antenna 24 amp 5GHz [36] 11ZYNQ 7000 Zc702 [35] 999Power Divider 24-6GHz 30Watts RoHS IP67 [41] 1095 times cable 305mm HPP100 SMA [42] 23Total 2222
Few small trees
Empty areawith sand floor
48 mTX
Met
al fe
nce
X
Several tall trees
Bushes
0∘
90∘
minus90∘
RX
Figure 7 Top view of the outdoor scenario for the measurement campaigns including the positions of the transmitter and of the antennaarray based receiver
Time (samples)0 100 200 300 400 500 600
DoA
DsCaponMusic
EspritExpectedTensor DS
minus100
100
minus80
80
minus60
60
minus40
40
minus20
20
0
Ang
les (
>A
LM
∘ )
Figure 8 Comparison between the DoA estimation schemes byvarying the DoA from +60∘ to minus60∘ with steps of 10∘
distributed (iid) as indicated in Section 2 Depending on the120578119875 we have two hypothesisH119875 1003816100381610038161003816100381610038161003816100381610038161003816
120582119872minus119875 minus 119872minus119875119872minus1198751003816100381610038161003816100381610038161003816100381610038161003816 le 120578119875 (A4)
H119875 1003816100381610038161003816100381610038161003816100381610038161003816120582119872minus119875 minus 119872minus119875119872minus119875
1003816100381610038161003816100381610038161003816100381610038161003816 gt 120578119875 (A5)
where H119875 120582119872minus119875 is a noise eigenvalue and H119875 120582119872minus119875 isa signal eigenvalue In order to have all 120578119875 depending of thePfa we can define the Pfa as
Pfa = Pr [d = 0 | d = 0] (A6)
Note that the 120578119875 thresholds are obtained by Monte Carlosimulations carried out in the only-noise scenario followingthe steps in [44] and by choosing the following amount ofrealizations
I = 10Pfa (A7)
10 Wireless Communications and Mobile Computing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(a) Without preprocessing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(b) With preprocessing
Figure 9 Comparison of the DoA estimation error between the DoA estimation schemes from Table 1 by varying the angle from minus90∘ to 90∘with steps of 10∘
Threshold
Prob
abili
ty o
f Fal
se A
larm
Linear ExtrapolationOriginal function
1 2
FIA10(pfa1)
FIA10(pfa2)
Figure 10 Log linear extrapolation based on two points given by Pfas and thresholds 120578119875Depending on the noise behaviour and the parameters
of the scenario [54 56] the thresholds can be extremelylowTherefore the computational complexity of (A7) can beprohibitive In order to overcome such limitation we proposean extrapolation approach to compute the thresholds forextremely low values of Pfa
Sincewewish to estimate values outside the known limitswe can use an extrapolation method and approximate thedescending side of the curve as a decreasing exponential Inorder to simplify the approximation we adopt a logarithmicscale as exemplified in Figure 10
Given the two known points in Figure 10 obtained byMonte Carlo simulations and given the linear extrapolation
in (A8) we can compute the two unknown constants a andb
Pfa = a sdot 120578P + b (A8)
The constants a and b are given by (A9) and (A10)by using the two known points (log10(Pfa1) 1205781) and(log10(Pfa2) 1205782)
119886 = log10 (Pfa2Pfa1)(1205782 minus 1205781) (A9)
119887 = log10 (Pfa2) minus 1205782 sdot ( log10 (Pfa2Pfa1)(1205782 minus 1205781) ) (A10)
Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

10 Wireless Communications and Mobile Computing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(a) Without preprocessing
Angles (deg)
Erro
r (deg)
DsCaponMusic
EspritTensor
minus80 minus60 minus40 minus20 0 20 40 60 80
100
101
102
(b) With preprocessing
Figure 9 Comparison of the DoA estimation error between the DoA estimation schemes from Table 1 by varying the angle from minus90∘ to 90∘with steps of 10∘
Threshold
Prob
abili
ty o
f Fal
se A
larm
Linear ExtrapolationOriginal function
1 2
FIA10(pfa1)
FIA10(pfa2)
Figure 10 Log linear extrapolation based on two points given by Pfas and thresholds 120578119875Depending on the noise behaviour and the parameters
of the scenario [54 56] the thresholds can be extremelylowTherefore the computational complexity of (A7) can beprohibitive In order to overcome such limitation we proposean extrapolation approach to compute the thresholds forextremely low values of Pfa
Sincewewish to estimate values outside the known limitswe can use an extrapolation method and approximate thedescending side of the curve as a decreasing exponential Inorder to simplify the approximation we adopt a logarithmicscale as exemplified in Figure 10
Given the two known points in Figure 10 obtained byMonte Carlo simulations and given the linear extrapolation
in (A8) we can compute the two unknown constants a andb
Pfa = a sdot 120578P + b (A8)
The constants a and b are given by (A9) and (A10)by using the two known points (log10(Pfa1) 1205781) and(log10(Pfa2) 1205782)
119886 = log10 (Pfa2Pfa1)(1205782 minus 1205781) (A9)
119887 = log10 (Pfa2) minus 1205782 sdot ( log10 (Pfa2Pfa1)(1205782 minus 1205781) ) (A10)
Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Wireless Communications and Mobile Computing 11Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
1
0 02 040 002 004
06 08 1 12 14 16 18
(a)Pf
a
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
2
0 02 040 002 004 006
06 08 1 12 14 16 18 2
(b)
Pfa
10minus300
10minus250
10minus200
10minus150
10minus100
10minus50
Measured curveExtrapolated curveExtrapolated with correct MO
10minus8
10minus6
10minus4
10minus2
3
0 05 10 002 004 006 008
15 2 25
(c)
Figure 11 Thresholds for extrapolated data using computation with M=4 and N=41
By replacing a and b in (A8) we obtain the expressionfor the 120578119875 in (A11)
120578119875 = log10 (Pfa) minus (log10 (Pfa2) minus (1205782 (1205782 minus 1205781)) sdot log10 (Pfa2Pfa1))log10 (Pfa2Pfa1) (1205782 minus 1205781) (A11)
Following the framework of Figure 3 we set up the EFTwith a Pfa = 10minus263 and we obtained the following values forthe thresholds 1205781 = 15810 1205782 = 17810 and 1205783 = 21840
Note that there are only three thresholds since thesmallest eigenvalue is assumed as a noise eigenvalue in theEFT approach In Figures 11(a) 11(b) and 11(c) we depict
12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

12 Wireless Communications and Mobile Computing
Frequency (MHz)
Pow
erfr
eque
ncy
(dB
Hz)
0 02 04 06 08 1 12 14 16 18
minus100
minus120
minus80
minus60
minus40
minus20
0
1MN antenna
Figure 12 Power spectral density estimate of the only-noise samplescaptured by the 1st antenna of the antenna arraythe extrapolation curves for the thresholds 1205781 1205782 and 1205783respectively
B Noise Analysis
In Section 2 the noise is assumed to be Complex-Valued Circularly Symmetric Gaussian and identicallyand independently distributed (iid) The EFT relieson these properties of the noise Due to extremely lowvalues of the Pfa in Appendix A we analyze the noisebehaviour
According to Figure 12 the Power Spectrum Den-sity (PSD) is not flat indicating that the noise is timecorrelated
In Figure 13 we depict the normalized histogram forantenna 3 Note that the Gaussian approximation has errorsthat can be reduced with an improved model
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
The authors would like to thank the colleagues Prof DrSebastien Roland Marie Joseph Rondineau Dr-Ing Christo-pher Schirmer and Mr Mario Lorenz for their support Thiswork was partially supported by Research Support Founda-tion of the Brazilian Federal District (FAPDF) by the Brazil-ian Coordination for the Improvement of Higher Education
minus4 minus3 minus2 minus1 0 1 2 3 4 50
1
2
3
4
5
6
7
8
9
10
Measured noise only dataGaussian behavior
times104
Figure 13 Histogram of 3rd antenna with 70 bins estimated mean= 01162 and estimated standard deviation = 07377
Personnel (CAPES) and by the Brazilian National Councilfor Scientific and Technological Development (CNPq)
References
[1] R K Miranda J P C L Da Costa and F Antreich ldquoHighaccuracy and low complexity adaptive Generalized SidelobeCancelers for colored noise scenariosrdquoDigital Signal Processingvol 34 pp 48ndash55 2014
[2] R Kehrle Miranda J P C L da Costa F Roemer L RA X Menezes G Del Galdo and A L F de AlmeidaldquoLow complexity performance assessment of a sensor array viaunscented transformationrdquoDigital Signal Processing vol 63 pp190ndash198 2017
[3] D Neudert-Schulz A contribution to efficient direction findingusing antenna arrays [PhD dissertation] TechnischeUniversi-tat Ilmenau 2017
[4] M A M Marinho F Antreich and J P Carvalho LustosaDa Costa ldquoImproved array interpolation for reduced bias inDOA estimation for GNSSrdquo in Proceedings of the of Institute ofNavigation (ION) GNSS+ 2014
[5] D V de Lima J P da Costa J P Maranhao and R T de SousaldquoHigh resolution Time-delay estimation via direction of arrivalestimation and Khatri-Rao factorization for multipath mitiga-tionrdquo in Proceedings of the 21st International ITG Workshop onSmart Antennas (WSA 2017) pp 388ndash395 Berlin Germany2017
[6] D V de Lima J P C L da Costa J P A Maranhao and RT de Sousa ldquoTime-delay estimation via procrustes estimationand Khatri-Rao factorization for GNSS multipath mitigationrdquoin Proceedings of the 2017 11th International Conference on SignalProcessing and Communication Systems (ICSPCS) pp 1ndash7 IEEE2017
[7] D V De Lima J P C L Da Costa F Antreich R K Mirandaand G Del Galdo ldquoTime-Delay estimation via CPD-GEVDapplied to tensor-basedGNSS arrayswith errorsrdquo inProceedingsof the 7th International Workshop on Computational Advances
Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Wireless Communications and Mobile Computing 13
in Multi-Sensor Adaptive Processing (CAMSAP) pp 1ndash5 IEEE2017
[8] F Karimi ldquoHundreds of drones fly dangerously close tomannedaircraftrdquo httpseditioncnncom20151212usdrone-aircraft-close-calls 2015
[9] K Rawlinson ldquoDrone hits plane atHeathrow airport says pilotrdquohttpswwwtheguardiancomuk-news2016apr17drone-plane-heathrow-airport-british-airways 2016
[10] Z Alkhalisi ldquoDubai deploys a rsquodrone hunterrsquo to keep its airportopenrdquo httpmoneycnncom20161104technologydubai-air-port-drone-hunterindexhtmliid=EL 2016
[11] J Goglia ldquoA small drone hits a commercial airliner and nothinghappensrdquo httpswwwforbescomsitesjohngoglia20171019a-small-drone-hits-a-commercial-airliner-and-nothing-hap-pens78ad9a249ea1 2017
[12] HKrim andMViberg ldquoTwodecades of array signal processingresearchrdquo IEEE Signal ProcessingMagazine vol 13 no 4 pp 67ndash94 1996
[13] I Ziskind and M Wax ldquoMaximum likelihood localization ofmultiple sources by alternating projectionrdquo IEEE Transactionson Signal Processing vol 36 no 10 pp 1553ndash1560 1988
[14] R Muhamed and T Rappaport ldquoComparison of conven-tional subspace based DOA estimation algorithms with thoseemploying property-restoral techniques simulation and mea-surementsrdquo in Proceedings of the ICUPC - 5th InternationalConference on Universal Personal Communications vol 2 pp1004ndash1008 1996
[15] M Tarkowski and L Kulas ldquoRSS-based DoA estimation forESPAR antennasusing support vectormachinerdquo IEEEAntennasandWireless Propagation Letters vol 18 no 4 pp 561ndash565 2019
[16] T Nowak M Hartmann J Thielecke N Hadaschik and CMutschler ldquoSuper-resolution in RSS-based direction-of-arrivalestimationrdquo in Proceedings of the 2018 International Conferenceon Indoor Positioning and Indoor Navigation (IPIN) pp 1ndash8IEEE 2018
[17] K Honda D Iwamoto and K Ogawa ldquoAngle of arrivalestimation embedded in a circular phased array 4 times 4 MIMOantennardquo in Proceedings of the 2017 IEEEAsia Pacific MicrowaveConference APMC 2017 pp 93ndash96 IEEE 2017
[18] L Kulas ldquoRSS-based DoA estimation using ESPAR antennasand interpolated radiation patternsrdquo IEEE Antennas and Wire-less Propagation Letters vol 17 no 1 pp 25ndash28 2018
[19] Q Liang B Sun and G Zhou ldquoMultiple Beam Parasitic ArrayRadiator Antenna for 24 GHz WLAN Applicationsrdquo IEEEAntennas and Wireless Propagation Letters vol 17 no 12 pp2513ndash2516 2018
[20] C H Meng H H Cheng J L Wen C Y Chia H Y Tingand C L Hsin ldquoDirection-of-arrival estimator using arrayswitching on software defined radio platformrdquo in Proceedingsof the International Symposium on Antennas and Propagation(APSURSI) pp 2821ndash2824 IEEE 2011
[21] V Y Vu andA B Delai ldquoDigital solution for inter-vehicle local-ization system by means of direction-of-arrivalrdquo in Proceedingsof the International Symposium on Intelligent Signal Processingand Communications (ISPACS) pp 875ndash878 2006
[22] S Bjorklund and A Heydarkhan ldquoHigh resolution directionof arrival estimation methods applied to measurements from adigital array antennardquo in Proceedings of the IEEE Sensor Arrayand Multichannel Signal Processing Workshop (SAM rsquo00) pp464ndash468 2000
[23] R O Schmidt ldquoMultiple emitter location and signal parameterestimationrdquo IEEE Transactions on Antennas and Propagationvol 34 no 3 pp 276ndash280 1986
[24] V Y Vu A J Braga X Begaud and B Huyart ldquoDirection ofarrival and time of arrival measurements using five-port reflec-tometers and quasi-Yagi antennasrdquo in Proceedings of the 11thInternational Symposium on Antenna Technology and AppliedElectromagnetics ANTEM 2005 pp 1ndash4 2005
[25] ldquoRobin Radar Systems BV Elvira Drone Detection Radarrdquohttpswwwrobinradarcommarketsdrone-detection
[26] ldquoDronelabs LLC DD610AR Stationary Drone Detectorrdquo httpdronedetectorcomstationary-unit
[27] ldquoReal-Time RF DroneUAV and Radar Detection SystemrdquohttpwwwaaroniacomproductssolutionsAaronia-Drone-Detection-System
[28] ldquoDetect Inc Drone Watcherrdquo httpwwwdronewatchercom[29] R K Miranda D A Ando J P da Costa andM T de Oliveira
ldquoEnhanced direction of arrival estimation via received signalstrength of directional antennasrdquo inProceedings of the 2018 IEEEInternational Symposium on Signal Processing and InformationTechnology (ISSPIT) pp 162ndash167 2018
[30] D A Ando R K Miranda J P da Costa andM T de OliveiraldquoA novel direction of arrival estimation algorithm via receivedsignal strength of directional antennasrdquo in Proceedings of the2018Workshop on Communication Networks and Power Systems(WCNPS) pp 1ndash5 2018
[31] S Basak and B Scheers ldquoPassive radio system for real-timedrone detection and DoA estimationrdquo in Proceedings of the2018 International Conference on Military Communications andInformation Systems ICMCIS 2018 pp 1ndash6 2018
[32] ldquoA Devices FMComms5 Plugin Descriptionrdquo httpswikiana-logcomresourcestools-softwarelinux-softwarefmcomms5plugin 2016
[33] ldquoEval board software Defined Radio ADFMCOMMS5-EBZ-NDrdquo httpwwwanalogcomendesign-centerevaluation-hard-ware-and-softwareevaluation-boards-kitseval-ad-fmcomms5-ebzhtml
[34] ldquoADEVICES (2017) AD9361 datasheetrdquo httpwwwanalogcommediaentechnical-documentationdata-sheetsAD9361pdf
[35] ldquoZYNQ-7000 ZC702 Eval KITrdquo httpswwwxilinxcompro-ductsboards-and-kitsek-z7-zc702-ghtml
[36] ldquoDual band WiFi 24 amp 5GHz PCBrdquo httpwwwtecomusa-enproduct-2118309-1html
[37] P F C Lima R K Miranda J P C L Da Costa R ZelenovskyY Yuan and G Del Galdo ldquoLow complexity blind separationtechnique to solve the permutation ambiguity of convolutivespeechmixturesrdquo inProceedings of the 10th International Confer-ence on Signal Processing and Communication Systems ICSPCS2016 pp 1ndash10 2016
[38] B D Van Veen and K M Buckley ldquoBeamforming a versatileapproach to spatial filteringrdquo IEEE ASSPMagazine vol 5 no 2pp 4ndash24 1988
[39] J Capon ldquoHigh-resolution frequency-wavenumber spectrumanalysisrdquo Proceedings of the IEEE vol 57 no 8 pp 1408ndash14181969
[40] R Roy and T Kailath ldquoESPRIT-estimation of signal parametersvia rotational invariance techniquesrdquo IEEE Transactions onSignal Processing vol 37 no 7 pp 984ndash995 1989
[41] ldquoRF Power Splitter combiner divider - IP67 4 Way SMAFemale 24 - 60 GHzrdquo httpswwwinstockwirelesscomrfpower splitter combiner divider pd2578htm
14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

14 Wireless Communications and Mobile Computing
[42] ldquoCable assembly SMA long 305 mmrdquo httpswwwinstockwire-lesscom
[43] A Quinlan J-P Barbot P Larzabal and M Haardt ldquoModelorder selection for short data an exponential fitting test EFTrdquoEURASIP Journal onAdvances in Signal Processing vol 2007 no1 p 201 2007
[44] J Grouffaud P Larzabal and H Clergeot ldquoSome propertiesof ordered eigenvalues of a Wishart matrix Application indetection test and model order selectionrdquo in Proceedings ofthe International Conference on Acoustics Speech and SignalProcessing (ICASSP) vol 5 pp 2463ndash2466 IEEE 1996
[45] H Akaike ldquoInformation theory as an extension of the maxi-mum likelihoodrdquo in Proceeding of International Symposium onInformation Theory pp 267ndash281 1973
[46] L C Zhao P R Krishnaiah and Z D Bai ldquoOn detection ofthe number of signals in presence of white noiserdquo Journal ofMultivariate Analysis vol 20 no 1 pp 1ndash25 1986
[47] J Rissanen ldquoModeling by shortest data descriptionrdquo Automat-ica vol 14 no 5 pp 465ndash471 1978
[48] M O Ulfarsson and V Solo ldquoDimension estimation in noisyPCAwith SURE and randommatrix theoryrdquo IEEE Transactionson Signal Processing vol 56 no 12 pp 5804ndash5816 2008
[49] E Radoi and A Quinquis ldquoA new method for estimating thenumber of harmonic components in noise with applicationin high resolution radarrdquo EURASIP Journal on Applied SignalProcessing vol 2004 no 8 pp 1177ndash1188 2004
[50] R Badeau B David and G Richard ldquoSelecting the modelingorder for the esprit high resolution method An alternativeapproachrdquo in Proceedings of the International Conference onAcoustics Speech and Signal Processing 2 pp iindash1025 IEEE2004
[51] J-M Papy L De Lathauwer and S Van Huffel ldquoA shiftinvariance-based order-selection technique for exponentialdata modellingrdquo IEEE Signal Processing Letters vol 14 no 7 pp473ndash476 2007
[52] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[53] J P C L da Costa M Haardt F Romer and G Del GaldoldquoEnhanced model order estimation using higher-order arraysrdquoin Proceedings of the 2007 IEEE Conference Record of the Forty-First Asilomar Conference on Signals Systems and Computers(ACSSC) pp 412ndash416 IEEE 2007
[54] J P C L da Costa F Roemer M Haardt and R T de Sousa JrldquoMulti-dimensional model order selectionrdquo EURASIP Journalon Advances in Signal Processing vol 2011 article 26 2011
[55] J P C L Da Costa M Haardt and F Romer ldquoRobust methodsbased on the hosvd for estimating the model order in parafacmodelsrdquo in Proceedings of the 5th IEEE Sensor Array andMultichannel Signal Processing Workshop (SAM) pp 510ndash514IEEE Germany 2008
[56] J P C L da Costa Parameter Estimation Techniques for Multi-Dimensional Array Signal Processing Shaker Verlag 2010
[57] J P C L da Costa F Roemer F A de Castro R F Ramos LSabirova and S Schwarz ldquoIlmenau package for model orderselection and evaluation of model order estimation scheme ofusers of MIMO channel soundersrdquo in Proceedings of the XXIXSimposio Brasileiro de Telecomunicacoes (SBrT) XXIX SimposioBrasileiro de Telecomunicacoes (SBrT) Curitiba Brazil 2011
[58] T P Kurpjuhn M T Ivrlac and J A Nossek ldquoVandermondeinvariance transformationrdquo in Proceedings of the InternationalConference onAcoustics Speech and Signal Processing (ICASSP)vol 5 pp 2929ndash2932 IEEE 2001
[59] J E Evans J R Johnson andD F Sun ldquoApplication of advancedsignal processing techniques to angle of arrival estimation inATC navigation and surveillance systemsrdquo ser Technical report(Lincoln Laboratory) Massachusetts Institute of TechnologyLincoln Laboratory 1982 httpsbooksgooglecombrbooksid=lOIjSwAACAAJ
[60] D A Linebarger R D DeGroat and E M Dowling ldquoEfficientdirection-finding methods employing forwardbackward aver-agingrdquo IEEE Transactions on Signal Processing vol 42 no 8 pp2136ndash2145 1994
[61] S U Pillai and B H Kwon ldquoForwardbackward spatialsmoothing techniques for coherent signal identificationrdquo IEEETransactions on Signal Processing vol 37 no 1 pp 8ndash15 1989
[62] T G Kolda and B W Bader ldquoTensor decompositions andapplicationsrdquo SIAM Review vol 51 no 3 pp 455ndash500 2009
[63] R K Miranda J P C da Costa B Guo A L de AlmeidaG Del Galdo and R T de Sousa ldquoLow-complexity and high-accuracy semi-blind joint channel and symbol estimation formassive mimo-ofdmrdquo Circuits Systems and Signal Processingpp 1ndash23 2018
[64] ldquoSDR Starter Kit 2x2 MIMO 50 MHz to 6 GHz PC basedrdquohttpakashkosgiwixsitecomagile-solutionssdr-starter-kit-c1a59
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom





























