Embed Size (px)
Citation preview

REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIREMinistère de l’Enseignement Supérieur et de la Recherche Scientifique
Université M’hamed Bougara de Boumerdès
Thèse de Doctorat
En Génie Electrique,
Option: Electrification et Automatisation des Procédés Industriels
Présentée par:
Mr. Khodja Djalal Eddine
Thème
Elaboration d’un Système Intelligent de Surveillance et de Diagnostic Automatique en Temps Réel des Défaillances des
Moteurs à Induction
Date de Soutenance : 19 Avril 2007
Jury est composé de :
Mr BOUBAKEUR Ahmed Professeur Nationale Polytechnique d’Alger PrésidentMr CHETATE Boukhemis Professeur F.H.C-Université de Boumerdès Directeur de Thèse/
RapporteurMr BENFDILA Arezki Professeur FSI-Université de Tizi-Ouzou ExaminateurMr TOUHAMI Omar Professeur Ecole Nationale Polytechnique d’Alger ExaminateurMr OUAHDI Dris M. C. F.H.C-Université de Boumerdès ExaminateurMr TOURTCHINE Victor M. C. F.S-Université de Boumerdès ExaminateurMr DEBAILI Rachid PDG EDIEL-Alger Invité
Année Universitaire 2006/2007
lreei
Faculté des hydrocarbures et de la chimie
Laboratoire de Recherche sur l’Electrificationdes Entreprises Industrielles

ملخص
حیث معظم الطاقة الكهربائیة في ,تحتل حالیا المحركات الكهربائیة الغیر متزامنة مكانة هامة في المیدان الصناعي . ه االخیرةذالعالم مستهلكة من طرف ه
راجع لكذوا النوع من المحركات مستعمل بشكل واسع في الآللیات التي تتطلب السرعة المتغیرة ذك نجد هلذزیادة على مقارنة مع المحركات ا لسعرها المنخفض ذ ال تحتاج الى عنایة كبیرة و ك,الصالبة المیكانیكیة: كر منهاذلعدة عوامل ن
.االخرىلیات حالیا تعمل بشكل في حین الآل,ه المحركات غیر انها ال تخلوا من االعطابذه الخصائص التي تتمیز بها هذرغم ه
و جعلها االجهزةو تعطیلتوقفات المتكررة لي قد یترتب عنه عواقب وخیمة مثل اذالشیىء ال ,وقفت يی ال تحتممستمر وال انخفاض في المؤشرات (ه الحاالت تؤدي الى النقص في االنتاج و االنتاجیة ذ هكمثل ,خارج نطاق عملهاتعمل
.)االقتصادیةنظام االقتناء و . مة الكهرومیكانیكیة و المتكونة من نظامین ا العمل اقترحت هندسة النظام االتوماتیكي لالنظذفي اطار ه
.تحویل و معالجة المعلومات و نظام لتفسیرهاتم اللجوء الى استعمال . ج للتمثیلذالتي تتطلب استعمال نما السابقة األعمال نقائص لمواجهة ,من جهة أخرى
في دور تحدید ( بالمشاركة مع نظام خبیر )ختلف انواع النقائص مصنیفسمح بت التي ت(الشبكة العصبیة االصطناعیة عزل اثر االضطرابات و استعمال عدة مقادیر ,من ناحیة أخرى.) اجراءات الصیانة الالزمةتحدیدمختلف انواع النقائص و
طب بطریقة سریعة و یسمح برفع احتمال وقوع الع)فرق الكمونة و كیكانیی مثل التیار الكهربائي و السرعة الم(مؤشرة .بدرجة كبیرة من الثقة
تم اللجوء الى )النظام الكهرومیكانیكي(ات الكهربائیة الالمتزامنة محركلا للحصول على معلومات ,ا الصددذ له رات ي یسمح للحصول على البیانات الخطیة لتغیذالشيء ال. و المعالجة الرقمیة للتشغیل العادي و الغیر العاديتمثیلال
.)القیم المرجعیة(المقادیر الكهربائیة و المیكانیكیة
Abstract The automatic detection of the failures becomes increasingly essential because of the weakness of the human operator (by its natural); which is a consequence of the fatigue, lapse of memory, and sometimes by the pressure of the environment (noises, heats… etc). In fact, we are interested obligatorily of the automatic diagnosis; which allows detecting in an early way the anomalies, thing which represents one of the sure means which contribute to theimprovement the productivity of the various sectors To this end, this work is told about the device of automatic diagnostic of asynchronous motor. This diagnostic system is based on Artificial Neural Network (ANN), in order to find the different defects by classification. The machine health identification process is mainly based on recognition and comparison of real-time captured standard signature as stator current, rotation speed of machine. The features extraction of the instantaneous signals will then input to an Artificial Neural Networks (ANN) for recognition and identification. The output of the neural network was trained to generate a healthy index that indicates the machine health condition. In this work, the entries used in the neural network were the various types of signals: the instantaneous values and the effective values (root mean square) of the machine parameters.In the second method, we use the effective values (root mean square) of the three stator currents and those of the voltage supply and the value number of rotation speed.

AVANT PROPOS
La présente Thèse de Doctorat a été élaborée sous la Direction de Monsieur CHETATE
Boukhemis, Professeur à l’Université de Boumerdés et Directeur du Laboratoire de
Recherche sur l’Electrification des Entreprises Industrielles (LREEI). Je tiens à lui
exprimer ma reconnaissance pour la confiance qu’il m’a accordée et pour l’intérêt qu’il a
constamment porté à mes travaux de recherche ainsi que pour ces conseils et suggestions
à travers de fructueuses discussions.
J’adresse mes remerciements respectueux à Monsieur BOUBAKEUR Ahmed,
Professeur à l’Ecole Nationale Polytechnique-Alger, qu’il trouve ici l’expression de ma
gratitude pour avoir accepter de présider le jury de soutenance.
Je tiens à remercier les membres du jury pour leurs appréciations sur ce travail :
Monsieur TOUHAMI Omar, Professeur à l’Ecole Nationale Polytechnique d’Alger;
Monsieur OUAHDI Dris, Maître de Conférence à l’Université de Boumerdès;
Monsieur TOURTCHINE Victor, Maître de conférence à l’Université de Boumerdès;
Monsieur BENFDILA Arezki, Professeur à l’Université de Tizi-Ouzou;
Monsieur DEBAILI Rachid, PDG de l’Entreprise d’éclairage d’Alger ( Ex-PDG
d’Electro-Industries.
Mes remerciements vont également aux Professeurs OSSIPOV et LADIGUINE (Chaire
de Commande Electrique Automatique) et à Monsieur ANISSIMOV (Laboratoire de
Maitrise de l’Energie) de l’Institut d’Energétique de Moscou.
Je voudrais associer à ces remerciements toutes les personnes qui ont contribué de près
ou de loin à l’aboutissement de ce travail et surtout les membres de l’Equipe de
Recherche sur les Economies de l’Energie Electrique (actuellement Mécatronique)
du LREEI, à laquelle j’appartiens depuis 1998 ainsi qu’à Monsieur S.OUKALI de
l’Université de Boumerdès.
Par ailleurs, je remercie le Président Directeur Général ainsi que tout le personnel de
l’unité Electro-Industries d’Azzazga, en particulier la responsable de la formation
Madame OUDNI.

Dédicace
A mes très chers Parents A mes sœurs et frères
A ma femme

Délibération du jury

Délibération du jury

Délibération du jury

Nomenclature
Nomenclatures
a, b, c : …………. .Les axes triphasés
d, q :…………. Les axes biphasés respectivement directe et en quadrature
Va, Vb ,Vc : ……...Tensions instantanées des phases statoriques
Ia, Ib, Ic : …………Courants instantanés des phases statoriques
Vds, Vqs : ………...Tensions statoriques d’axe direct et en quadratique
Ids, Iqs :………….. Courants statoriques d’axe direct et en quadratique
r :…………….. Vitesse de rotation de la machine
P :………………. Nombre de paire de pôles
Cem :……………. Couple électromagnétique
Cr : ……………...Couple résistant
Cf : ……………....Couple de frottement
J :……………….. Moment d’inertie
M : ………………Inductance Mutuelle entre phases du stator
L : ……………….Inductance propre d’une phase statorique
Rs : ………………Résistance d’une phase statorique
a , b , c : …. Flux instantanés des phases statoriques
: ………………L’angle entre les axes triphasé et les axes biphasé
:……………… L’angle entre le vecteur de courant I1 et l’axe de la phase ‘a’
:…………….. La vitesse angulaire de rotation du système d’axes biphasé par apport au
système triphasé
P ( ) :…………. Matrice de PARK
Hs : ……………..Le champ tournant statorique
Hr :……………Le champ tournant rotorique
Ud :.………….La tension redressée
Uf :….…………La tension d’alimentation de l’onduleur
Si :…………….La sortie intermédiaire ‘i’
Oi :……………La sortie ‘i’ d’un neurone
θi : ……………Le seuil
fi , fj: …………Les fonctions d’activations
X :…………….Le vecteur d’entrée du neurone
Wi :……………La force de la connexion simulant les poids synaptiques des neurones

Nomenclature
ΔWij: …………Mécanisme d’adaptation
w :…………….Vecteur de poids synaptiques
α :……………..Le pas d’adaptation
Si, Sj :…………Valeurs d’activations
ti :……………..Entrée professeur
g(X) :…………Fonction discriminante
ƒ(X) :…………Fonction sigmoïde
Opi :…………..La sortie output du réseau
tpi :..…………..La sortie désirée (Target)
P :..…………...Le nombre d’exemples ou de la longueur de l’ensemble d’entraînement
Spi :..………….Le potentiel somatique du neurone i
E(w): .………. Fonction de coût (performance)
n : ….………...Le numéro d’itération
η :..…………...Le pas d’apprentissage
Spi :…………...L’erreur commise à le sortie du neurone i pour l’exemple P
Ui :……………Le neurone ‘i’ appartenant à la couche cachée
F’(Spi) : ………La dérivée de la fonction d’activation du neurone i en fonction de Spi
MAS :.……….Machine Asynchrone
RNA : ……….Réseau de Neurones Artificiels
MTI : ………..Module de Traitement de l’Information
CAN :………. Convertisseur Analogique-Numérique
(A/N) : ………Analogique- Numérique
SACI : ………Système d’Acquisition et de Conversion de l’Information
FAR:…………Filtre anti-Repliement
MUX :………..Multiplexeur
DEMUX :…….Demultiplexeur

Table des matières
Table des matières
Introduction générale...…………………………………………………………………………..…………………1
Chapitre 1Etude de la problématique du diagnostic des défaillancesd'une machine asynchrone
1.Introduction………………….…………………….…………….…………………………….........5 2.Défauts des systèmes électromécaniques………………………..…..……..……………..…….......6
2.1.Analyse statistique des origines des défauts statoriques et rotoriques…………………….…..….8
2.2.Les grandeurs indicatrices………………………………………………………………………...8
2.2.1.Contenu spectral des courants en cas des défauts dans le stator.……..……………..….……….92.2.2.Contenu spectral du courant en cas des défauts dans le rotor………………...……………….…93.Analyse de la procédure du diagnostic……………………………………………………......……124.Problématique du diagnostic des machines électriques……….…………………………………...145. Analyse des méthodes de diagnostic existantes………….………………………………………..155.1.Les méthodes internes………………………………………………………………………........155.1.1 La méthode du modèle………………………………………………………………................165.1.2.La redondance analytique et matérielle……………………………………………….………..165.2.Les méthodes externes …………………………………………………………………....……...17 5.2.1.Les méthodes de reconnaissance des formes……………………………………………….......175.2.2.Diagnostic par systèmes experts…………………………….……………………...…………..195.2.3.Diagnostic par logique floue……………………………………………………………………205.2.4.Le diagnostic externe avec les réseaux de neurones………………………………………..20 6. Analyse des méthodes d’identification des défauts électriques des machines Asynchrones rotoriques……………………...……………………………………………….……….216.1.Méthodes d’analyse des défauts rotoriques…………..…………………………..…….…….……216.2. Méthodes d’analyse des défauts statoriques……..…………………..…………………………...227.Analyse critique des méthodes de diagnostic existantes………………………………….……..….238.Position du problème à résoudre……………………….…………………………………………...259.Conclusion du premier chapitre….……………….…..……………………………...……….……..27
Chapitre 2Modélisation de la machine asynchrone en vue d’étudier soncomportement dans le régime normal et anormal du fonctionnement1. Introduction …...………………………………………………...……………………..………...28
2. Modèle d’étude .................................................................................................................................29
3. Schéma multi enroulement équivalent …………………………..………………………….….....29
3.1. Calcul des inductances …………………………………………………………………………..303.2. Mise en équation …………………………………………………………………......................32

Table des matières
4. La transformation de Nr grandeurs équilibrées vers deux grandeurs dq …….....……..…….......38
4.1. la matrice de résistance du modèle dq équivalent ………………………………………………40
4.2. la matrice d’inductance du modèle dq équivalent…………………………………………….…46
5. Simulation du modèle dq ………………………………………………………………..…..…...48
6. Conclusion du deuxième chapitre………………………………………………….……….……...50
Chapitre 3Etude du comportement de la machine asynchrone en présence de défauts
1.Introduction…………………………………………………………………………………….…...51
2. Etude du comportement de la machine asynchrone en cas de défaut de la tension d’alimentation (partie statorique)……………………………………………………....522.1.Défaut monophasé de la tension …………………..………………………………………..…....52
2.2. Défaut biphasé de tension ………..……………………….…………………………………......54
2.3. Défaut triphasé de tension …………………………….…..……………………………………..56
2.4..Interprétation des résultats de simulation (régime normal et anormal)….……………………….59
3. Etude du comportement de la machine asynchrone en cas de défauts statoriques….……………..60
3.1 Définition de la matrice de transformation ………………………………………………….……62
3.2 Transformation du modèle triphasé ………………………………………………….……………63
3.3 Interprétation des résultats de simulation des défauts statoriques
(court-circuit entre spires) ……………………………………………………………………..…….66
4.Etude du comportement de la machine asynchrone en cas de défaut
dans la partie rotorique……………………………………………………………………..……......70
4.1. Modélisation des défauts dans le cas d’une cassure d’une barre ou de deux barres…….………70
4.2. Simulation des défauts rotoriques en présence d’une charge sur l’arbre du moteur.……….…...71
4.3. Analyse spectrale de la signature du courant en présence des défauts rotoriques.………………77
5. Conclusion du troisième chapitre ………………………………………………………..…..……79
Chapitre 4Etude Expérimentale des défaillances de la machine asynchrone
1.Introduction……………..………………………………………….…………………………..….80
2.Description de l’architecture globale du système d’entraînement…….……………………..…….81
SIMOVERT-Siemens

Table des matières
2.1.Sschéma global du convertisseur et ses interfaces ………………………………………….…..81
3.Concept des zones du Convertisseur SIMOVERT-Siemens ……………………..………….……84
4.Commande vectorielle de la machine asynchrone ………………….………..…………...............864.1.Principe de la commande vectorielle…………………….………………….…….……….….…86 4.2. Evolution des paramètres de l’ensemble commande-convertisseur-moteur …….………….....895.Etude expérimentale de la machine asynchrone en présence de défauts ……………………..……89
6.Interprétation des résultats de simulation(régime normal et anormal)…………………………….96
7.Conclusion du quatrième chapitre ………………………………………….……………….…….97
Chapitre 5Développement du système automatique de diagnostic des défaillances et son application dans le cas des machines asynchrones à rotor en court-circuit et celle à rotor bobiné
1. Introduction…………………………………………………………………..…………….……..982.Description de l’architecture existante automatique du système automatique
de diagnostic des défaillances………………………………………………….……………..……...98
2.1. Sous-système d'acquisition, de conversion et de traitement de l'information (SACI)…...……..99
2.2. Sous-système d'interprétation de l'information ………………………………………….….....101
2.2.1. Système d'aide à la décision……………………………………………………………….....101
2.3. Les fonctions du sous-système d'interprétation de l'information ……………………………..102
3. Elaboration du module d’interprétation des informations…………………………………..……102
3.1.Choix des variables d'entrées de RNA (les paramètres représentatifs des défauts) ………….....103
3.2. Acquisition des données (base d'apprentissage )………………………………………………..103
3.2.1. Construction de la base d'apprentissage ……………………………………………….…......104
3.3. Construction du bloc de RNA………………………………………………….…………….…106
4. Apprentissage des réseaux de neurones sélectionnés …….……….………..…...…………….….109
5.Tests des RNA sur les nouveaux exemples ………………………………………………..…...…109
5.1 Interprétation des résultats……………………………………………………………………….111
6. Localisation des défaillances ……………………………………………...…………………...….115
6.1. Détection d’une défaillance et détermination de son code ……………………………….….…1156.2. Localisation de l’endroit d’apparition des défaillances ………………………………….……..116par le systéme d'aide à la décision
7. Synthèse de l’architecture de système automatique de diagnostic des défauts de la machine asynchrone en vue d’élaborer une installation expérimentale…………………..……116
8. Exemple d’un protocole de maintenance affiché par le système d'aide à la décision ………....…118
9. Conclusion du cinquième chapitre…………………………………………….………....…….…120
Conclusion Générale et Perspective ……………………………….…………..…….……….………122
Annexes…………………………………………………………………………………..…………..126

Listes des figures et des tables
Liste des figures
Figure.1.1 Constitution d’un système électromécanique…………………………………..…….……………..6 Figure.1.2 Défauts de la machine asynchrone présentés en pourcentage………………………….…………...7Figure.1.3 Répartition des types de défauts des machines asynchrones de moyenne puissance….…………...8 Figure.1.4 Les mesures utilisées pour la surveillance et le diagnostic des machines asynchrones….………….9Figure.1.5 Défaut due au roulement à billes…………………………………………………………………..10Figure.1.6 Défaut dynamique du à l’excentricité du rotor…………………………………………………….11Figure.1.7 Les différentes étapes du diagnostic industriel…………………………………………………….13Figure.1.8 Classement des méthodes de diagnostic…………………………………………………………...15Figure.1.9 Principe de fonctionnement de la méthode du modèle…………………………………………….16Figure.1.10 Principe de la méthode de redondance analytique..........................................................................17Figure.1.11 Procédure de diagnostic basée sur la technique de la reconnaissance des formes……………………………………………………………………………….18Figrue.1.12 Architecture générale d’un système expert de diagnostic………………………………...............19
Figure.2.1 Structure du rotor………………………………………………………………………………..….30Figure.2.2 Induction produite par une maille du rotor…………………………………………………………31Figure.2.3 Position de la maille rotorique K, par rapport à la bobine (m=0) statorique de la phase……………………………………………………………………….32Figure.2.4 Représentation d’une maille rotorique…………………………………………………..………….34Figure.2.5 Projection du modèle multi enroulements sur le modèle dq …………………………………….....38Figure.2.6 Evolution de la vitesse (cas d’un moteur sain)……………….……………………………….……48Figure.2.7 Evolution du couple (cas d’un moteur sain)………………….…………………………………..…48Figure.2.8 Evolution de du courant statorique (cas d’un moteur sain)…….……………………………....……49Figure.2.9 Evolution des courants rotoriques (cas d’un moteur sain)……....…………………………………49Figure.3.1 Résultats de simulation dans le cas d'une coupure monophasée de la tension d'alimentation (phase b)…………………………………………………………….53Figure.3.2 Résultats de simulation dans le cas d'un déséquilibre monophaséde la tension d'alimentation………………………………………………………………………….………….54Figure.3.3 Résultats de simulation dans le cas d'une coupure biphasée de la tension d'alimentation…………………………………………………………………………....………..55Figure.3.4 Résultats de simulation dans le cas d'un déséquilibre biphasé de la tension d'alimentation……………………………………………………………………………………..56Figure.3.5 Résultats de simulation dans le cas d'une coupure triphasée de la tension d'alimentation…………………………………………………………………………….……….57Figure.3.6 Résultats de simulation dans le cas d'un déséquilibre triphaséde la tension d'alimentation……………………………………………….…………………………………….58Figure 3.7 Résultats de simulation lors de l’apparition d’un défaut de court-circuit entre spires (12.5%)…………………………………………………..………………………...67Figure 3.8 Résultats de simulation lors de l’apparition le cas d’un défaut court-circuit entre spires (25%)…………………………………………………………………………………68Figure.3.9 Résultats de simulation lors de l’apparition d’un court-circuit entre phases……………………………………………………………………………….….69Figure.3.10 Evolution de la courbe des paramètres : au démarrage, en charge et lors de la rupture d’une barre………………………………………………………………………..………..72

Listes des figures et des tables
Figure.3.11 Evolution de la courbe des paramètres : au démarrage, en chargeet lors de la rupture de deux barres………………………………………………………………………………73Figure.3.12 Evolution de la courbe des paramètres : au démarrage, en charge et lors de la rupture de trois barres………………………………………………………………………….……74Figure.3.13 Evolution de la courbe des paramètres : au démarrage, en chargeet lors de la rupture de trois barres………………………………………………………………………………75Figure.3.14 Spectre du courant statorique dans le cas d’un moteursain en marche à vide……………………………………………………………………………………………77Figure.3.15 Spectre du courant statorique dans le cas d’un rotor avec une barre cassée……………………………………………………………………………..….77Figure. 3.16 Spectre du courant statorique dans le cas d’un rotor avec deux barres cassées…………………………………………………………………………….78Figure.3.17 Spectre du courant statorique dans le cas d’un rotor avec trois barres cassées……………………………………………………………………………..78Figure.3.18 Spectre du courant statorique dans le cas d’un rotor avec quatre barres cassées……………………………………………………………………………78Figure.4.1 Architecture globale du convertisseur SIMOVERT-Siemenset de ses interfaces………………………………………………………………………………………..……..81Figure.4.2 Schéma synoptique simplifié du système d’entraînement…………………………………………..85 Figure.4.3 Ensemble Convertisseur-Moteur et Commande…………………………………………………….86Figure.4.4 Présentation des résultats expérimentaux : utilisation du logiciel MASTERDRIVE du Convertisseur SIMOVERET pour la commande de la machine asynchrone……………………………...............................................................................................................87Figure.4.5 Evolution des paramètres de la machine fonctionnant avec la commande vectorielle,en cas d’un fonctionnement normal……………………………………………………………….…………….88Figure.4.6 Défaut dans la partie statorique dans le cas d’une coupure monophaséede la tension à la sortie de l’onduleur……………………………………………………….……..……….….90Figure.4.7 Défaut dans la partie statorique dans le cas d’une coupure biphasée de la tension à la sortie de l’onduleur……………………………………………………………..……………91Figure.4.8 Défaut dans la partie rotorique dans le cas de coupure d’une phase rotorique à vide……………………………………………………………….……………………92Figure.4.9 Défaut dans la partie rotorique dans le cas de coupure d’une phase rotorique en charge…………………………………………………………………………………93Figure.4.10 Défaut dans la partie rotorique dans le cas de coupure de deux phases rotoriques à vide……………………………………………………………………………..…94Figure.4.11 défaut dans la partie rotorique, coupure de deux phases rotoriques en charge…………………………………………………………………………....95Figure.5.1 Architecture du système automatique de diagnostic des défaillances……………………………....99Figure.5.2 Structure du premier réseau à étudier (les valeurs indicatrices sont les valeurs échantillonnées). Cas de la machine asynchrone à rotor en court-circuit….……………………………………………………106Figure.5.3 Structure du deuxième réseau à étudier (les valeurs indicatrices sont les valeurs efficaces)Cas de la machine asynchrone à rotor en court-circuit….…………………………………………………….107Figure.5.4 Architecture de système automatique de diagnostic des défautsCas de la machine asynchrone à rotor bobiné…………………………………………………………………107Figure.5.5 Principe de classification des signaux des défaillances……………………………………………107Figure.5.6 Test des sorties du deuxième RNA dans le cas d’une coupure biphasée de tension……………………………………………………………………………112Figure.5.7 Test des sorties du RNA dans le cas d’une déséquilibre biphasé de tension…………………………………………………………………………113Figure.5.8 Test des performances du RNA coupure d’une phase statorique à vide d’une MASRB…………………………………………………………………114Figure.5.9 Test des performances du RNA coupurede deux phases rotorique en charge d’une MASRB…………………………………………………………...114Figure.5.10 Détection d’une défaillance d’une machine à inductionet détermination de son code………………………………………………………………………………..…115Figure.5.11 Localisation de l’endroit d’apparition des défaillancesd’une machine à induction par le systéme d'aide à la décision……………………………………………….116

Listes des figures et des tables
Figure.5.12 Synthèse de l’architecture de système automatique de diagnosticdes défauts d’une machine à induction……………………………………………………………..................118Figure.5.13 Présentation du type de défaut qui vient d'être détecté………………………………………..…118Figure.5.14 Affichage des causes possibles qui ont provoqué l’apparition du défaut………………………..119Figure.5.15 Affichage des remèdes qu'il faut appliquer (entreprendre) pour éliminer le défaut………………………………………………………………………..119
Liste des tables
Tableau 5.1 Classification des types des défauts de la machine asynchroneà rotor en court-circuit………………………………………………………………………………………...105Tableau 5.2 Classification des types des défauts de la machine asynchrone à rotor bobiné………………………………………………………………………105Tableau.5.3 Différents essais d'apprentissage des RNA………………………………………………………109Tableau.5.4 Résultats de test du premier RNA (Déséquilibre biphasé pour différentes charges). Cas d’une machine asynchrone à rotor en court-circuit…………………………………………………………………..110Tableau.5.5 Résultats de test du deuxième RNA (Déséquilibre biphasé pour différentes charges). Cas d’une machine asynchrone à rotor en court-circuit…………………………………………….…………110

Introduction générale

Introduction générale
1
Introduction générale
Les machines asynchrones triphasées sont largement utilisées ces dernières années
dans des applications nécessitant une vitesse variable. A cet effet, le développement des
utilisations de ce type de machines électriques (dû essentiellement à leurs simplicité, faible
coût, et robustesse) est tel que nous les trouvons maintenant dans tous les secteurs, entre
autres: l’aéronautique, le nucléaire, la chimie et les transports ferroviaires [2, 5, 10, 12, 13].
Par ailleurs, la variation de vitesse induit naturellement l’utilisation d’un onduleur de
tension. Hélas, le moteur doit supporter tant bien que mal ces ondes de tensions riches en
harmoniques alors qu’il n’a été conçu que pour la fréquence nominale 50 Hz. De ce fait, on
assiste à un vieillissement prématuré du moteur asynchrone. Il devient plus vulnérable et
donc, plus prédisposé aux défaillances. Par conséquent, il nous faut nécessairement du
diagnostic et de la surveillance, de la prévention afin d’améliorer la fiabilité de l’ensemble
« système électromécanique » [2, 5, 10, 12, 13, 15].
Il est à signaler que l’apparition d’un défaut conduit le plus souvent à un arrêt
irrémédiable de la machine asynchrone entraînant en conséquence, un coût de réparation non
négligeable pour l’entreprise (cas des machines de fortes puissances) sans oublier la perte de
production occasionnée. En plus, dans le domaine nucléaire, par exemple, il est indispensable
d’assurer la sécurité des personnes et du matériel car aucun système qu’il soit simple ou
complexe, n’est à l’abri d’un dysfonctionnement [10, 13, 15, 17, 20].
Actuellement, dans le monde industriel, le diagnostic des machines électriques devient
de plus en plus une exigence car les chaînes de production nécessitent un fonctionnement sûr
[10, 12, 13, 15, 17]. Ces dernières doivent être dotées de systèmes de production fiables car
l’apparition d’une défaillance, même la plus anodine, peut mener à un dommage matériel ou
corporel inévitable. C’est pour éviter ces problèmes que la recherche, à l’échelle
internationale, s’emploie depuis une dizaine d’années à élaborer des méthodes efficaces de
diagnostic. Celles-ci ont pour premier objectif de prévenir les utilisateurs d’un risque possible
pouvant apparaître en un point particulier du système; chose qui permet d’augmenter la
disponibilité des installations industrielles afin de réduire les coûts directs et indirects de la
maintenance des équipements de production (Les coûts directs de la maintenance sont ceux
relatifs aux diverses pièces de rechange, mains d’œuvre, etc. Tandis que les coûts indirects
sont essentiellement dus au manque à gagner engendré par les arrêts de production), par
conséquent, il est clair que l’enjeu d’une bonne politique de surveillance est très important

Introduction générale
2
pour les entreprises soucieuses d’avoir une meilleure maîtrise des coûts de maintenance et de
production [2, 10, 12, 14, 15, 17].
D’autre part, les études statistiques effectuées dans les différents pays du monde [2]
démontrent l’importance de la quotte part des défauts électriques (statoriques et rotoriques),
qui se situe entre 70% et 80% de l’ensemble des défauts qui affectent les machines
asynchrone. Par ailleurs, les méthodes de diagnostic [10, 15, 32, 41, 54] peuvent être
subdivisées en deux grandes catégories: les méthodes internes qui se basent sur l’existence
d’un modèle formel de l’équipement à surveiller et les méthodes externes qui se basent
uniquement sur l’analyse des variables de surveillance ainsi que sur les connaissances (à
priori) des experts humains. Les méthodes internes sont naturellement tributaires de
l’existence ainsi que de la qualité d’une modélisation physique de l’équipement. Le modèle
établi servira de référence pour définir le fonctionnement normal et tout écart par rapport au
point de fonctionnement défini préalablement sera synonyme de défaillance. L’inconvénient
de ces techniques est l’existence d’incertitudes de modélisation qui sont dues au fait que la
modélisation physique ne prend pas en considération tous les paramètres et les aléas qui
peuvent détériorer une partie de la signature d’un paramètre de diagnostic (variable
indicatrice).
Les méthodes externes [10, 15, 32, 41, 54] sont subdivisées en deux parties: La partie
correspondante aux outils de traitement de bas niveau, parce qu’ils sont en contact direct avec
le signal en provenance du capteur, et ne servent généralement que pour la génération
d’alarmes brutes, sans aucune information concernant leur signification. La deuxième partie
est celle des techniques dites de haut niveau dont les outils sont plutôt orientés vers la
communication avec l’expert. Celles-ci représentent les techniques de l’intelligence
artificielle et servent comme outil de base pour l’aide à la décision. Leurs entrées peuvent être
obtenues soit à partir des données brutes venant directement des variables indicatrices des
défauts, soit à partir des données traitées venant des sorties des traitements de bas niveau.
Parmi les techniques de l’intelligence artificielle utilisées pour la surveillance, le présent
travail est basé sur l’utilisation des réseaux de neurones artificiels (RNA), qui se démarquent
des autres outils par leur capacité d’apprentissage et de généralisation [10, 12, 14, 15, 28, 95,
96, 97, 98, 99].
Les réseaux de neurones artificiels peuvent être exploités en diagnostic comme outil
principal de classification et de surveillance [10, 12, 14, 15, 28]. En effet, le problème de
surveillance peut être considéré comme étant un problème de reconnaissance des formes et
de classification où les classes correspondent aux différents modes de défaillance du système
et des formes représentant le comportement du système.

Introduction générale
3
A la lumière de ce qui a été dit la présente thèse est consacrée à l’élaboration d’un
système de diagnostic des défaillances (permettant la détection des types et la classification
des endroits des défauts) des défauts statoriques et rotoriques des machines asynchrones
triphasées en utilisant, dune part, les réseaux de neurones artificiels comme outil principal de
classification des différents types de défaillances et, d’autre part, d’un système expert aide à la
décision.
La présente thèse s'articule autour de cinq chapitres :
Le premier chapitre est consacré à l’analyse de l’état de l’art sur le diagnostic des
machines électriques. A cet effet, sont présentées les méthodes de diagnostic et les différentes
défaillances qui peuvent apparaître dans les machines asynchrones. Ensuite une étude
comparative des différentes techniques d’analyse des défauts statoriques et rotoriques des
machines asynchrones a été effectuée. Pour terminer le problème à résoudre est posé.
Dans le deuxième chapitre est présentée la modélisation de la machine asynchrone à
cage d’écureuil en choisissant l'approche analytique globale basée sur la signature des
grandeurs externes telles que : courant, couple, etc. Pour ce faire, nous avons utilisé un
schéma multi-enroulements équivalent de la cage. Dans ce cas, les équations sont écrites dans
un référentiel lié au rotor, étant donnée que les défauts étudiés sont ceux rotoriques. Puis,
nous avons effectué la transformation du modèle de Nr grandeurs en un modèle dq équivalent
(modèle réduit), pour faciliter la simulation.
Dans le troisième chapitre, nous avons modélisé la machine asynchrone à cage
d’écureuil en utilisant le modèle multi-enroulements en présence de défauts en vue de choisir
les variables indicatrices des défauts ainsi que les signatures qui seront utilisées comme
paramètres de diagnostic. Dans cette partie du travail, nous nous sommes intéressés, d’une
part, aux défauts statoriques et d’alimentation, pour lesquels nous avons élaboré un modèle
triphasé équivalent au modèle multi-spires, d’autre part, nous avons présenté les différents
résultats des défauts rotoriques en charge. En plus, nous avons fait l'analyse spectrale pour le
courant statorique afin de faire révéler les défauts des cassures des barres par des
harmoniques (ou par les spectres d’énergie des signaux).
En vue de permettre la réalisation d’un système de diagnostic pour toutes les machines
à induction (à rotor en court-circuit et à rotor bobiné), le quatrième chapitre est consacré à

Introduction générale
4
l’étude expérimentale du comportement de la machine asynchrone à rotor bobiné en présence
des défaillances. La machine est alimentée par un convertisseur de vitesse SIMOVERT type
SIEMENS. Les défauts statoriques et rotoriques ont été considérés dans ce chapitre après
avoir conçu l’architecture globale de cette installation.
Le cinquième chapitre est consacré, en premier, à la description de la nouvelle
architecture du système automatique de diagnostic. Ensuite, sont présentées les étapes
d’élaboration des modules de traitement et d’interprétation de l’information qui sont basés sur
les réseaux de neurones artificiels. Le système automatique de diagnostic a pour objectif la
détection et la localisation des défaillances et la génération d’un protocole de maintenance
(par le système d’aide à la décision). A cet effet, on est passé par l'étude de trois réseaux de
neurones artificiels de différentes architectures utilisant deux types de signatures de référence,
à savoir :
- Les valeurs échantillonnées des variables indicatrices ;
- Les valeurs efficaces des signaux sinusoïdaux des variables indicatrices.
Dans ce cas, en vue d’élaborer le système de diagnostic des machines à induction, deux
études ont été effectuées : dans la première sont utilisés les signaux de référence (obtenus par
modélisation de la machine asynchrone à rotor en court-circuit). Tandis que, dans la
deuxième sont utilisés les signaux de référence reflétant le comportement d’une machine
asynchrone à rotor bobiné (obtenus expérimentalement).
Pour terminer une conclusion générale est présentée sur les différents résultats obtenus
et les différentes perspectives envisagées pour le développement futur de nos travaux de
recherche sur le diagnostic des défaillances des machines électriques au sein de Laboratoire
de Recherche sur l’Electrification des Entreprises Industrielles.

Chapitre1 Etude de la problématique du diagnostic
des défaillances d'une machine asynchrone

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
5
Chapitre1 - Etude de la problématique du diagnostic des défaillances d'une machine asynchrone
1. Introduction
Les arrêts forcés de production suite à des pannes de machines peuvent être coûteux et
représenter une part importante de l’investissement initial. En plus, l’absence d’une stratégie
de maintenance peut causer la perte des éléments d’un processus et provoquer une diminution
de la sécurité, d’où son intérêt stratégique [1].
La détection automatique des défaillances devient de plus en plus indispensable à
cause de la faiblesse de l’opérateur humain (par sa nature) ; qui est une conséquence de la
fatigue, de l’oubli, et parfois de la pression de l’environnement (bruits, chaleurs, etc.). Par
ailleurs, la réalisation d’une maintenance prédictive plutôt qu’une maintenance systématique
(méthode traditionnelle) permettra, d’une part, d’éviter le recours à des changements
irrationnels de pièces (qui dans 90 % des cas se fait de manière prématurée) et, d’autre part,
de prévoir les types d’interventions lors des arrêts programmés de production où lors des
arrêts d’urgence. De plus, les réparations avant incident sont plus faciles à exécuter et moins
coûteuses (en temps d’intervention et en matériel). Il est aussi important de savoir qu’un
défaut non traité peut entraîner des dégradations encore plus importantes [2, 3, 4, 5, 6, 7, 8, 9,
10]. Ce qui engendre des conséquences non souhaitables (autant pour la production que pour
le personnel), à savoir, entre autres :
Arrêts fréquents du processus de production (d’où le manque à gagner) ;
Augmentation des pertes d’énergie ;
Augmentation des coûts de maintenance ;
Augmentation des coûts de production ;
Risque de mise hors service des équipements ;
Danger pour la sécurité du personnel.
Par ailleurs, Un des composants essentiels des processus industriels actuels s’avère
être le système électromécanique, qui est constitué d’un ensemble moteur, convertisseur-
commande, et de la charge mécanique (voir figure1.1). Sa gamme de puissance étendue et sa

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
6
souplesse d’utilisation liées aux progrès de l’électronique de puissance ont contribué à son
applicationréussie dans différents domaines [1].
Par ailleurs, les entraînements électriques utilisent de plus en plus les moteurs
asynchrones à cause de leur robustesse, de leur puissance massique et de leur faible coût de
construction. Cependant, il arrive que ces machines présentent des défauts électriques ou
mécaniques. En effet, notre objectif est de détecter ces défaillances en cours d’évolution et en
cours d’apparition [12, 13].
Par conséquent, on s’intéresse obligatoirement au diagnostic automatique qui permet
de détecter de façon précoce les anomalies, chose qui représente un des moyens sûrs pour
contribuer à améliorer la productivité des différents secteurs [1].
2. Défauts des systèmes électromécaniques
Le moteur asynchrone triphasé est maintenant largement utilisé dans des applications
nécessitant une vitesse variable. Il peut faire appel à une multitude commandes. Ces machines
ont la réputation d’être robustes, et adaptées à des applications de large gamme de puissances.
A cet effet, des études statistiques démontrent que certaines pannes sont plus fréquentes que
d’autres, ce qui nous amène à axer notre étude sur les types de défauts les plus fréquents [2,
14]; à savoir :
Les défauts du stator résultant de la coupure ou du court-circuit d’une ou de plusieurs
phases de l’enroulement statorique ;
Les connexions anormales de l’enroulement statorique ;
Les court-circuits dans l’enroulement rotorique ;
Les défauts sur les roulements ;
Moteur Electrique
Charge MécaniqueConvertisseur
Unité de Calcul et de Commande
Bloc d’alimentation
Courantde seuil
Vitessede seuil
Couplede seuil
Vitesse de référence
Tension de référence
Courant mesuré
Vitesse mesurée
Tension mesurée
Stator/RotorRedresseur/Onduleur
Figure.1.1 Constitution d’un système électromécanique

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
7
La cassure d’une barre du rotor ou le craquement de l’arbre de la machine ;
Les irrégularités de l’entrefer ;
L’inclinaison de l’axe du rotor (pouvant résulter d’un frottement entre le rotor et le
stator).
Le fonctionnement à vitesse variable de la machine asynchrone nécessite le contrôle
de l’énergie par un convertisseur statique, et par un circuit de commande (qui est en général,
boucle fermée). Par conséquent, on peut envisager d’autres types de défauts potentiels qui
peuvent surgir sur la partie puissance et commande ; à savoir [1, 15] :
La défaillance d’un bras d’onduleur: un des composants électroniques (transistor ou
thyristor) est maintenu ouvert ;
L’un des composants (Transistor ou Thyristor) est maintenu fermé;
La défaillance d’un capteur: la valeur mesurée n’est pas transmise au circuit de
commande (défaut sur la commande);
La défaillance partielle du capteur de vitesse (offset sur le capteur).
Par ailleurs, Les défauts qui se produisent au niveau du stator et du rotor ont des effets
importants sur les paramètres de la machine asynchrone: électriques (courant, couple, flux),
mécaniques (vibration) et chimiques (modification de la composition de l’huile des paliers).
Par ailleurs, certaines études statistiques [2] indiquent les quotes-parts des défauts qui se
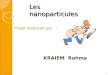
produisent au niveau de la machine asynchrone (voir figure.1.2).
Une autre étude statistique effectuée en 1988 par une compagnie allemande d’assurance de
systèmes industriels [2] sur les pannes des machines asynchrones de moyenne puissance (de
50 kW à 200 kW) a montrée que 50% des défauts sont des défauts statoriques et seulement
22% sont des défauts rotoriques (voir figure.1.3).
Figure.1.2 Défauts de la machine asynchrone présentés en pourcentage
stator 50%
rotor 20%
autres 10%
Mécaniques 20%

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
8
Par conséquent, dans la suite de ce travail les défauts qui seront étudiés sont les défauts
électriques (statoriques et rotoriques).
2.1 Analyse statistique des origines des défauts statoriques et rotoriques [2]
Les origines des défaillances statoriques sont principalement dues à un problème :
– thermique (surcharge sur l’arbre du moteur);
– électrique (diélectrique, bobinage);
– environnemental (agression).
Par ailleurs, pour le rotor, les effets sont essentiellement dus à un problème :
– thermique (surcharge);
– électromagnétique (Force);
– résiduel (déformation);
– dynamique (arbre de transmission);
– mécanique (roulement);
– environnemental (agression).
2.2 Les grandeurs indicatrices
La complexité des signaux dépend de la nature des systèmes et des matériels à
diagnostiquer et varie en fonction de l’anomalie recherchée. Le diagnostic d’une défaillance
de la machine asynchrone fait le plus souvent appel à l’utilisation de signatures obtenues à
partir de signaux qui contiennent les informations jugées pertinentes par les spécialistes du
domaine (voir figure.1.4).
Figure.1.3 Répartition des types de défauts des machines asynchrones de moyenne puissance
Figure.1.4 les mesures utilisées pour la surveillance et le diagnostic des machines asynchrones
stator 60%rotor 22%
autres 18%

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
9
A cet effet, les techniques de validation des signaux les plus utilisés sont [1,2, 16, 17] :
- l’analyse des paramètres électriques (la signature des courants statoriques, et de tension,
etc.) ;
- la mesure des paramètres mécaniques (le couple et la vitesse de rotation) ;
- le contrôle des vibrations ;
- la mesure des températures ;
- le contrôle des émissions de fréquences radio ;
- le contrôle du champ électromagnétique ;
- l’analyse chimique ;
- les mesures des bruits acoustiques.
2-2-1 Contenu spectral des courants en cas des défauts dans le stator
A partir des études effectuées [2, 10, 15, 18, 19], il a été montré que le courant statorique
avait un spectre enrichi en cas de création d’un court-circuit entre plusieurs spires au stator.
Les fréquences sont données par la relation suivante (voir annexe1) :
(1.1)
a. Les courts-circuits internes: un court-circuit entre phases provoquerait un arrêt net de
la machine. D’un autre côté, un court-circuit au bobinage prés du neutre (ou entre spires)
n’a pas un effet aussi radical. Il conduit à un déséquilibre de phases, ce qui a une
répercussion directe sur le couple. Ce type de défauts perturbe aussi sensiblement les
commandes développées sur la base du modèle de Park (hypothèse d’un modèle
équilibré).
b. Les décharges partielles: Ce phénomène naturel dû aux décharges dans les isolants
entre conducteurs ou entre conducteurs et sa masse s’amplifie avec le vieillissement des
isolants. Il est pratiquement imperceptible dans les isolants neufs par les moyens de
mesures classiques car son effet n’est pas distingué par rapport aux bruits de mesure. Sa
présence précède l’apparition des courts-circuits entre phases ou entre phase et masse
lorsque ces décharges partielles ont suffisamment détérioré les isolants.
2-2-2- Contenu spectral du courant en cas des défauts dans le rotor
Les différents éléments pouvant être défaillants se répartissent en trois (3) catégories; à savoir
(voir annexe1) :
fkgpnfcc
1

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
10
– portion d’anneau ou de barre du rotor ;
– roulement à billes ;
– excentricité statique, dynamique et mixte du rotor.
a. Les barres cassées [2, 18]: Suivant la puissance du moteur, la cage d’écureuil à des barres
en cuivre ou en aluminium, des courants inter-barres peuvent exister. Dans le cas de figure
dans le modèle de simulation le rang de la matrice afférent au rotor n’est plus constant.
D’autre part, les fréquences engendrées, autour de la fréquence fondamentale de
l’alimentation, par un défaut de barre ou de portion d’anneau, sont:
(1.2)
En outre, les harmoniques d’espaces gênèrent eux aussi des fréquences dont la relation est:
(1.3)
b. Les cassures de barres et de portions d’anneaux des cages : La détection de ces
défaillances est rendue difficile par le fait que lors de leurs apparitions, la machine continue à
fonctionner [20]. Ces défauts ont, par ailleurs, un effet cumulatif. Le courant que conduisait
une barre cassée, par exemple, se répartit sur les barres adjacentes. Ces barres sont alors
surchargées, ce qui conduit à leurs ruptures et ainsi de suite jusqu’à la rupture d’un nombre
suffisamment important de barres qui pourra provoquer une dissymétrie de répartition de
courant au rotor et des à-coups de couples, chose qui générera des vibrations et l’apparition de
défauts mécaniques et, peut-être, l’arrêt total de la machine.
c. Les roulements : La relation entre les vibrations des roulements à billes et le spectre du
courant statorique est basée sur le fait que toutes les excentricités interfèrent sur le champ
dans l’entrefer de la machine asynchrone [2, 8]. Un défaut de roulement à billes se manifeste
par la répétition continuelle du contact défectueux avec la cage extérieure (ou intérieure) du
roulement (voir figure.1.5).
ab fggp
kf
1
sb fgkf ..21
Figure.1.5 Défaut due au roulement à billes

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
11
La fréquence de répétition pour la cage intérieure et extérieure est donnée par :
(1.4)
Le spectre en courant est alors décrit par:
(1.5)
Cette expression contient des données spécifiques au roulement à billes; à savoir:
– nb: nombre de billes;
– Db: diamètre des billes;
– Dc: distance du centre des billes;
– θ: l’angle de contact de la bille avec la cage.
En considérant que habituellement le nombre de billes est compris entre 6 et 12, deux
relations sont couramment utilisées [2, 8]:
(1.6)
Donc le spectre en courant sera enrichi de:
(1.7)
d. L’excentricité [2, 21, 22]:
L’excentricité se répartit en deux catégories : statique et dynamique (voir la figure.1.6).
L’excentricité statique se distingue par le fait que le centre du rotor n’est pas égal à celui du
stator. L’excentricité dynamique est caractérisée par le fait que le centre du rotor tourne
autour du centre du stator.
cos1*2int,
c
br
baext D
Df
nnff
cos1*2
cos1*2int
c
br
bext
c
br
b
D
Df
nf
D
Df
nf
rb
rbext
fnf
fnf
..6,0
..4,0
int
int,int, extaext nfff
Figure.1.6 Défaut dynamique du à l’excentricité du rotor

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
12
Les fréquences proches du fondamental sont données par la relation:
(1.8)
Où :
– fexc = fréquence "d’excentricité.
Cette relation a l’avantage de ne pas nécessiter de connaissance précise de la machine
asynchrone car elle ne fait pas apparaître des termes liés à sa conception.
Une seconde approche consiste à utiliser une expression liant le défaut de barre cassée à
celles de l’excentricité et des encoches au rotor. C’est ainsi qu’une formule, sous une forme
compacte fera apparaître les harmoniques de fréquences correspondants à ces défauts (qui
dépendent essentiellement du nombre de paires de pôles), à savoir :
(1.9)
Dans le cas d’excentricité statique, nd = 0, alors que pour l’excentricité dynamique, nd
peut prendre les valeurs : 1, 2, 3, etc. (nd est connu sous le nom "d’ordre d’excentricité "). Le
coefficient nωs représente l’harmonique de temps liée à l’alimentation du moteur asynchrone.
e. Dissymétrie du rotor [23]
Elle désigne la variation de l’entrefer dans le moteur, une répartition non homogène
des courants dans le rotor et le déséquilibre des courants statoriques. Le déséquilibre des
efforts sur les barres génère un couple global non constant.
3. Analyse des procédures de diagnostic
Lorsqu’un défaut apparaît dans un équipement industriel, le système de diagnostic lié à
ce dernier doit d’abord détecter l’anomalie du fonctionnement puis y identifier la (ou les)
cause (s) de défaillance à l’aide d’un raisonnement logique pour qu’il puisse être isolé [4, 6,
7, 8, 9,].
En effet, l’organisation générale de la procédure de diagnostic s’articule autour des points
suivants :
à partir des moyens de mesure ou d’observation appropriés, nous effectuons l’extraction
des informations nécessaires à la mise en forme des caractéristiques associées aux régimes
de fonctionnements (normaux et anormaux) ;
sexc fp
gnf
11
ssdRexc fnp
gnNkf
1.

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
13
l’obtention des signatures associées à des symptômes de défaillance en vue de détecter le
dysfonctionnement (signatures de références) ;
la détection d’un dysfonctionnement par comparaison avec des signatures associées à des
états de fonctionnements normaux ;
la mise en œuvre d’une méthode de diagnostic de défaillance à partir de l’utilisation des
connaissances sur les relations de causalité (catalogue cause-effets) ;
une phase d’interprétation des données de diagnostic (identification du type et de la nature
du défaut) ;
la prise de décision en fonction des conséquences et de l’importance des défauts.
Le diagramme ci-dessous (voir figure.1.7) résume les différentes étapes et les différentes
techniques nécessaires au diagnostic industriel:
Dans ce contexte et, d’après l’étude bibliographique [4, 6], on constate que les
techniques utilisées pour la détection et le diagnostic de défaillances peuvent être subdivisées
en deux catégories :
Méthodes internes : à partir de modèles physiques ou de comportements validés par les
techniques d’identification des paramètres, le diagnostic de défaillance devient possible en
suivant, en temps réel, l’évolution des paramètres physiques ou bien en utilisant
l’inversion du modèle de type «boite noire» ;
Validation des mesures
Caractérisation du fonctionnement
Détection
Diagnostic
Identification de la cause
Décision
Maintenance Consignes
Processus Industriel Mesures et observations
Figure.1.7 Les différentes étapes du diagnostic industriel

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
14
Méthodes externes : dans ce cas, il n’est pas nécessaire de disposer d’un modèle
mathématique du processus, par contre les méthodes retenues reposent sur l’expertise
humaine confortée par un solide retour d’expérience. Dans cette catégorie, on retrouve les
méthodes basées sur l’intelligence artificielle, parmi lesquelles, nous pouvons citer la
reconnaissance des formes, les systèmes experts et les réseaux de neurones artificiels.
4. Problématique du diagnostic des machines électriques
Pour éviter de résoudre un problème inverse de diagnostic mal posé, il est indispensable
de s’appuyer sur des relations de cause à effets.
En général, le problème du diagnostic revient essentiellement à un problème de
connaissance sur le modèle déterministe entre la cause et l’effet ; plus précisément il faut
trouver les variables déterministes des défauts, et puis on choisit les signatures qui indiquent
« caractérisent » mieux ces défauts par le traitement du signal de ces variables. En outre,
le diagnostic qu’il soit médical ou bien industriel est toujours basé sur la comparaison entre le
comportement du procédé défaillant et du comportement sain (ou de son modèle).
La comparaison nécessite des indicateurs, des symptômes révélateurs qui, une fois analysés,
permettent d'abord de détecter le comportement défaillant, d'en déduire la fonction ou
l'élément en dysfonctionnement (localiser), puis d'en déterminer la cause et enfin, si possible,
d'y remédier [1, 4].
Par ailleurs, le concept hautement stratégique de maintenance prédictive nécessite la
connaissance des grandeurs significatives à mesurer pour avoir une image aussi proche que
possible de l’état de la machine. Le système de suivi de la machine devrait pouvoir [3, 4, 5] :
Interférer le moins possible avec le système (les grandeurs peuvent elles être mesurées
en temps réel " on line" ?, problème de sécurité, etc.) ;
Etre capable de suivre plusieurs grandeurs ;
Etre évolutif ;
Etre pilotable à distance ;
Stocker les données pour permettre une analyse tendancielle.
Quant à la stratégie générale adoptée pour le diagnostic, elle consiste à [4, 6, 7, 8, 9, 10] :
Recenser les défauts et les pannes pouvant se produire ;
Trouver les grandeurs mesurables liées à ces défauts (grandeurs indicatrices) ;
Choisir la méthode la plus proche des critères définis ci-dessus ;
Définir les seuils "d’alarme " à partir desquels il faudra intervenir.

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
15
De ce qui précède, le problème à résoudre en terme de diagnostic consiste en la
connaissance du comportement caractéristique du système en cas de défaut, au choix des
méthodes de diagnostic adéquates à leur application pour le cas étudié,l’identification des
valeurs indicatrices, et la conception de l’architecture du système de diagnostic et son
implémentation.
5. Analyse des méthodes de diagnostic existantes
Le graphe suivant présente les différentes méthodes de diagnostic (voir gigure1.8) [4].
5.1 Les méthodes internes
Cette famille de méthodes est principalement dérivée des techniques utilisées par les
automaticiens à partir de modèles physiques ou de comportement validés par les techniques
d'identification des paramètres, il devient possible de mettre en œuvre la méthode du
problème inverse.
Le diagnostic de défaillance est possible en suivant en temps réel l'évolution des
paramètres physiques, ou bien en utilisant l'inversion de modèles de type "boite noire", les
méthodes internes de diagnostic se regroupent en deux grandes familles :
- la méthode du modèle ;
- la méthode de redondance analytique et matérielle.
Méthodes internes
Système expert
Réseaux de neurones
Reconnaissance des formes
Logique floue
Méthodes externes
Redondance analytique et matérielle
Modèle
Méthodes de diagnostic
Figure.1.8 Classement des méthodes de diagnostic

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
16
5.1.1 La méthode du modèle
La méthode du diagnostic basée sur le modèle [1] consiste à comparer les grandeurs
déduites d’un modèle représentatif du fonctionnement des différentes entités du processus
avec les mesures directement observées sur le processus industriel. La figure 1.9 représente le
fonctionnement d’un système de détection de défaillances utilisant l’approche basée sur le
modèle.
En général, pour des processus continus dotés de systèmes de régulation, il est
judicieux d’utiliser un modèle prenant séparément en compte les chaînes de régulation, les
actionneurs et les sous ensembles du processus industriel. Comme il a été constaté en [1] pour
un système d’entraînements électriques, le modèle possède une structure identique à celle du
processus. La comparaison des comportements sert à la détection des écarts entre les signaux
d’état: normaux et anormaux. Les observations simultanées des signaux de sortie de
comparaison permettent d’isoler rapidement le module défaillant. Cette méthode est appliquée
au réseau de transmission d’énergie de la Nouvelle Zélande [24], connu par MoBFAD (c’est
un système basé sur le modèle pour le diagnostic et les analyses des défaillances). En plus,
elle a été utilisée dans plusieurs travaux effectués au niveau de l’Equipe de Recherche sur les
Economies d’énergie électrique et du Laboratoire de Recherche sur l’Electrification des
Entreprises Industrielles [17].
5.1.2 La redondance analytique et matérielle
La redondance analytique se base sur la connaissance d'un modèle mathématique du
système à surveiller (voir figure1.10). ce modèle placé dans les mêmes conditions que le
système est calculé en temps réel. De ce fait il peut fournir les relations de redondances
nécessaires à la comparaison du procédé avec le modèle [1, 4, 16, 24].
Figure.1.9 Principe de fonctionnement de la méthode du modèle
modèle processus
Comportement observéComportement déduit
Comparaison des comportements

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
17
D’autre part, il existe une méthode par la redondance matérielle qui consiste à
doubler ou à tripler l'équipement en plusieurs actionneurs, plusieurs capteurs et plusieurs
systèmes de commande [1]. L'utilisation de cette méthode est essentiellement réservée aux cas
où la continuité de service est obligatoire (avionique). En effet, elle apporte l'avantage une
fois la défaillance détectée, d'utiliser la partie de l'équipement encore saine. Toutefois, c'est
une méthode chère et complexe.
5.2 Les méthodes externes
Dans cette catégorie on retrouve toutes les méthodes basées sur l'intelligence artificielle
[4, 10], qui peuvent être regroupées en quatre grandes familles :
- Méthodes de reconnaissance des formes ;
- Diagnostic par systèmes experts ;
- Diagnostic par logique floue ;
- Diagnostic par réseaux de neurones.
6.2.1 Les méthodes de reconnaissance des formes
Parmi toutes les approches du diagnostic, la reconnaissance des formes est une
technique de définition d’algorithmes permettant de classer des objets dont l’aspect a varié
par rapport à un objet type. Il s’agit de définir à quelle forme–type une forme observée
ressemble le plus [4, 25, 26, 27].
Dans ce cas, la forme est définie par un ensemble de ‘d’ paramètres appelés caractères
qui sont les composants du vecteur forme x ; les prototypes sont les points représentatifs du
vecteur forme dans l’espace à ‘d’ dimensions. Dans un problème de reconnaissance des
formes on suppose généralement que les formes x à classer appartiennent à M catégories bien
déterminées appelées classes et notées w1, w2, …..wm. Par ailleurs, compte tenu du bruit de
Figure.1.10 Principe de la méthode de redondance analytique
Modèle
Procédé
G
Erreur d'estimation
Perturbationsd(t)
Défautsf(t)

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
18
mesure les vecteurs appartenant à une classe donnée wi forment une zone particulière dans
l’espace de dimension d.
Le problème de reconnaissance des formes consiste à déterminer les formes séparant les M
classes dans le but de pouvoir ultérieurement classer une nouvelle forme x lors de l’opération
de classification ou de discrimination [10, 18, 27].
La procédure de diagnostic basée sur les techniques de reconnaissance des formes met
en œuvre quatre étapes principales qui sont résumées sur la figure 1.11.
Dans ce cas, la dernière phase correspond évidemment à l’exploitation du système de
diagnostic. D’autre part, après l’acquisition d’une nouvelle signature, on calcule la forme
associée dans l’espace de présentation et on procède à sa classification, chose qui se réalise
sans difficulté (par exemple, il faudra prendre la décision de rejeter le point B ou de l’affecter
à une nouvelle classe).
5.2.2 Diagnostic par systèmes experts
Un système expert doit fournir des réponses associées à une situation donnée sachant
que la complexité du domaine étudié ne permet pas d’établir à priori toutes les configurations
possibles des situations; tel qu’un spécialiste du dépannage il réalise son diagnostic à l’aide
d’une description partielle de la situation. En effet, à partir de l’ensemble de symptômes dont
1sS(f)
f
2s3s 4s
4321 ssssxtr Vecteur forme x
Choix de la signature initiale
Construction des vecteurs formes
Réalisation de la base d’apprentissage de représentation
des classes
Acquisition de nouvelles données, (représentation, classification et détection)
1w
4w
2w
3w
c)
1A
1.B
1w
4w
2w
w3
b)
Figure .1.11 Procédure de diagnostic basée sur la technique de la reconnaissance des formes
a)

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
19
il dispose, il peut déduire les conclusions possibles, élaborer de nouvelles hypothèses et
approfondir son diagnostic en exploitant des informations supplémentaires collectées sur le
système à diagnostiquer [4, 28].
Un système expert est constitué de plusieurs éléments principaux [4] (voir la fig.1.12)
dont on peut citer :
La base de connaissances: elle contient l’ensemble des connaissances nécessaires à la
résolution des problèmes du domaine ;
la base de faits: la base de faits qui au départ contient les informations initiales relatives au
domaine s’enrichit progressivement de conclusions ou de nouveaux faits déduits par le moteur
d’inférence ;
le moteur d’inférence: Le moteur d’inférence exploite de façon indépendante les
informations contenues dans la base de faits et la base de connaissances pour fournir une
solution au problème donné. Par ailleurs, le moteur d’inférence produit dans son mécanisme
de raisonnement de nouveaux faits qui sont mémorisés dans la base de faits.
5.2.3 Diagnostic par logique floue
Le concept de sous-ensemble flou a été introduit pour prendre en compte
l’imprécision. La fonction d’appartenance à un ensemble flou prend des valeurs sur
l’intervalle [0,1]. Celles-ci expriment le degré d’appartenance d’un élément à cet ensemble: 0
pour la non appartenance stricte et 1 pour l’appartenance stricte [6, 29].
Figure.1.12 Architecture générale d’un système expert de diagnostic
Gestionnaire de règles
Base de connaissances
Base de faits
Entrée des faits
Moteur d’inférence
A partir d’un chaînage arrière
A partir d’un chaînage avant
Entrée de faits en cours de diagnostic
conlusions

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
20
Le principe de fonctionnement du diagnostic basé sur la logique floue consiste à
extraire et à calculer les signaux d’entrée, en utilisant les règles linguistiques représentées
sous forme de fonctions d’appartenances, ces règles peuvent décrire tous les modèles de
comportement possibles qui correspondent aux différentes manifestations du défaut considéré
[12, 18].
En général, la procédure de fonctionnement d’un système flou est effectuée en trois
étapes:
La fuzzification;
L’inférence;
La défuzzification.
Le bloc fuzzification contient en général un traitement de données préliminaires; ces
données sont alors traitées par des règles linguistiques, ce qui nécessite leur définition par des
fonctions d’appartenance. La fuzzification fournit une série de variables floues, réunies par un
vecteur, qui sera introduit au niveau du bloc d’inférence.
Dans le bloc d’inférence, les valeurs des variables linguistiques sont liées par plusieurs
règles qui doivent tenir compte du comportement statique et dynamique du système.
Dans la dernière étape, il faut transformer la valeur floue (linguistique) en une valeur
déterminée pour déduire l’état du système, ceci se fait dans le bloc défuzzification; en [12,
18] on rencontre des applications de cette méthode pour le diagnostic des machines
asynchrones.
5.2.4 Diagnostic par réseaux de neurones artificiels
Cette méthode fait partie des méthodes de diagnostic externes, elle utilise la
classification automatique des signaux et des formes [4, 28].
Le principe de fonctionnement des réseaux de neurones est inspiré des mécanismes de
fonctionnement du cerveau humain. De l’extérieur, le réseau de neurones se présente comme
une «boite noire» qui reçoit des signaux d’entrée et qui fournit les réponses appropriées.
Dans le cas du diagnostic, les différents états de fonctionnement normaux et anormaux
sont le plus souvent caractérisés par des signatures. L’opérateur humain, après avoir
mémorisé et appris les différentes formes de signatures associées à un état déterminé, est apte
à la lecture d’une nouvelle signature et d’identifier l’état de la machine. Si la nouvelle
signature est déjà apprise, il devra l’interpréter et la mémoriser.
En général, le RNA permet de reconstituer le processus de raisonnement humain décrit
ci-dessus.

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
21
Par ailleurs, un réseau de neurones est défini par [4, 30, 31] :
la nature des cellules élémentaires qui le constituent (binaires ou continues) ;
l’architecture et le nombre des couches du réseau ;
la nature des connexions ;
les méthodes d’apprentissage ;
les performances de classification ;
les mécanismes de mémorisation.
6. Analyse des méthodes d’identification des défauts électriques des machines asynchrones
L’objectif de réalisation d’un diagnostic en temps réel (on-line) de défauts statoriques
et rotoriques dans les machines asynchrones en vue d’aboutir à une maintenance prédictive a
poussé les chercheurs à mettre au point diverses techniques. A cet effet, les travaux dans leur
majorité se sont basés sur la signature (analyse harmonique) de grandeurs indicatrices telles
que: courant, couple et en utilisant la théorie de champs tournants et celle des circuits
électriques.
Par ailleurs, une autre approche faisant partie des méthodes statistiques de diagnostic peut
être citée. Elle se base sur le test de franchissement des seuils des paramètres du système à
diagnostiquer [32]. Dans ce qui suit est présentée l’analyse des méthodes et des techniques
sus-citées.
6.1 Méthodes d'analyse des défauts rotoriques
6.1.1 Méthodes d’analyse basées sur les circuits électriques
Cette approche analytique est basée sur l’analyse des signatures de grandeurs externes
globales telles que: les courants et le couple électromagnétique. Elle utilise le modèle de
Kirchhoff (réseau électrique équivalent de la machine) ainsi que la transformation «des 2
axes» appliquée aux équations électriques du système multi-enroulements. Une surveillance
en temps réel (on-line) des machines est effectuée, elle est particulièrement appliquée à la
détection des défauts de cages des moteurs à induction [5, 33].
En outre, un schéma multi- enroulement équivalents à la cage rotorique a été proposé [20,
34, 35, 36, 37, 38, 39, 35, 40] dans ce cas l’influence du stator est prise en compte par le biais
de sources de potentielles équivalentes à l’effet du bobinage en utilisant la théorie des deux
axes. En plus, une étude a été basée sur la détection des signaux modulés à une fréquence

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
22
double du glissement (2*g*fs) apparaissant lors de dissymétries rotoriques suite à des défauts
de cage.
6.1.2 Méthode d’analyse basée sur le champ tournant
Cette approche est dite ‘locale’ car, elle est basée sur la signature de grandeurs locales
telles que : la densité de flux; il s’agit souvent de méthodes numériques par éléments finis
permettant une analyse fine des phénomènes physiques locaux associés aux défauts de cages.
En effet, une étude [41] a été faite sur les effets des défauts de la machine asynchrone où une
approche a été proposée qui repose sur la surveillance des paramètres de modèles de
comportement de la machine, sensibles aux défauts: Les résistances rotoriques d’un modèle
triphasé, l’inductance magnétisante et la résistance rotorique d’un modèle diphasé. Des outils
de détection des défauts rotoriques, basés sur des observateurs à base de filtre de Kalman
adaptés aux systèmes non- linéaires ont été synthétisés pour estimer les valeurs des
paramètres cités ci-dessus [41, 42,43, 44, 45, 46]. Certains autres auteurs, afin de pouvoir
obtenir des signatures des défauts, ont analysé les spectres d’harmoniques du couple
électromagnétique [47, 48], la puissance instantanée [49], les vecteurs de Park, des courants
sous forme de lissajou [50], ainsi que le champ par éléments finis [51], Alors que d’autres ont
proposé une méthode de simulation et de détection de barres cassées dans les machines
asynchrones commandées en vitesse variable [15, 52, 53, 54].
6.2 Méthodes d'analyse des défauts statoriques
Ces méthodes de diagnostic utilisent les paramètres structuraux d’un modèle de connaissance
pour détecter et localiser les défaillances. Le point essentiel assurant l’efficacité de ces
méthodes est le choix du modèle de connaissance [54]. En effet, le type de défaut qui doit être
détecté, correspond au modèle utilisé [15, 41]. Les premiers travaux relatant l’estimation des
paramètres ont débuté avec des méthodes relativement simples (modèle de Park par exemple
[54, 56, 57, 58, 59]. L’étape suivante est nécessairement donc le passage à un modèle de
connaissance plus fin de la machine, tout en gardant la possibilité d’identifier les paramètres
souhaités. Ces modèles peuvent être les modèles triphasés [19, 40], qui s’affranchissent de
l’hypothèse d’une machine magnétiquement équilibrée, ou encore des modèles à n phases
(modèle multi-spires) [10, 15, 41, 54, 60], capables de refléter le fonctinnement de la machine
sur une large bande de fréquence. En effet, un court-circuit entre spires est à l’origine d’un
nouveau bobinage (virtuel) monophasé au stator traversé par un fort courant, il en résulte un

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
23
champ magnétique additionnel dans la machine de fréquence ±fs (où fs est la fréquence de
synchronisme). Les nouvelles composantes de ce dernier entraînent l’apparition
d’harmoniques de fréquence kfs dans les courants absorbés par la machine. Par ailleurs, les
paramètres estimés, eux-mêmes, permettent d’effectuer une première analyse des conditions
de fonctionnement de la machine. Par exemple une augmentation anormale de la valeur des
résistances statoriques peut signifier un échauffement excessif et donc une dégradation
progressive des enroulements [54].
7. Analyse critique des méthodes de diagnostic existantes
La grande diversité des technologies des systèmes industriels (mécaniques, thermiques,
électriques, électroniques; numériques, etc.) ne permet pas d'utiliser une méthode universelle
qui posséderait tous les avantages et aucun inconvénient [4]. Une méthode universelle de
diagnostic industrielle n'existe pas [1, 4, 55].
Par ailleurs, les systèmes de diagnostic élaborés précédemment dans le Laboratoire de
Recherche sur l’Electrification des Entreprises Industrielles [56, 57, 58, 59], étaient
caractérisées par certains inconvénients liés, entre autre, à l’utilisation de la méthode de
corrélation. Celle-ci appartient aux méthodes de diagnostic internes, lesquelles permettent la
détection du défaut par la comparaison de la signature observée avec la signature déduite d’un
modèle. Dans ce cas détection est réalisée en fonction de la valeur de l’écart entre les deux
signaux. Ceci rend la phase d’identification de la défaillance plus difficile car les
perturbations (ou le changement des paramètres de la machine) provoquent des écarts très
diversifiés. La prise de décision sur la présence d’une défaillance devient alors dans ce cas
aléatoire et, par conséquent, le diagnostic à réaliser ne peut pas être précis.
D’autre part, il est à noter la nécessité de la connaissance a priori du modèle précis de
la machine asynchrone. De plus, avec le vieillissement et en fonction de l’ambiance
(environnement) le modèle représentatif du fonctionnement de la machine asynchrone change.
Chose qui modifie les valeurs des grandeurs déduites de ce dernier (signaux de référence),
étant donnée que les modèles actuellement existants ne prennent pas en considération cet
aspect.
En plus, dans la plus part des travaux publiés [10, 34, 35, 36, 37, 38, 39, 44, 45, 46,
59] une seule grandeur indicatrice du défaut (le courant statorique) a été utilisée, ce qui
entraîne, dans certains cas, la similitude entre deux signaux de défauts différents, cette
situation est possible, surtout dans le cas de la détection du défaut dans le domaine fréquentiel
[59].

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
24
En outre, vue la diversité des défaillances (défauts statoriques, rotoriques et
d’alimentation) de la machine asynchrone, ils ne peuvent pas être obtenus par le même
modèle mathématique. En effet, chaque défaut est modélisé séparément par son propre
modèle [10, 15, 54, 60].
D'autres méthodes de diagnostic externes utilisent les techniques de l'automatique pour
suivre en temps réel ou en temps différé des éléments qui ont un sens physique. Les méthodes
de diagnostic externes utilisent schématiquement des "boites noires " entre les signatures
associées aux causes et à leur effets [4, 12, 28].
Les systèmes experts correspondent à une reproduction sur un ordinateur du
raisonnement d'un expert dans un domaine technique précis. A cet effet, on peut constater que
différents types de connaissances sont modélisables et formulables dans ces systèmes d'aide
au diagnostic, à savoir :
- les connaissances de "surface" ;
- les connaissances "profondes" ;
- les connaissances "mixtes".
L'analyse des implantations des systèmes d'aide au diagnostic dans les différents secteurs
industriels fait ressortir que la majorité d'entre eux font appel au système expert suivi par ceux
basés sur la reconnaissance des formes [61, 62]. Toutefois, il est à remarquer que le
développement d’un système de diagnostic basé sur la technique des systèmes experts,
nécessite un grand effort (pour sa conception et sa réalisation). En outre, son installation coûte
très cher [12]. D’un autre côté, la logique floue peut être appliquée pour remplacer les
systèmes experts par des règles linguistiques, quand le problème à résoudre est trop complexe
(difficile à analyser). Ces règles sont plus souhaitables pour décrire la nature exacte des
machines réelles mais les formes et le nombre des fonctions d’appartenance doivent être
initialement choisies en utilisant une large base de données [18].
Partant de la considération que le caractère principal du système de diagnostic est de
constituer un catalogue défauts–symptômes, les approximateurs universels (réseaux de
neurones) paraissent très intéressants pour la mise en place de la procédure du diagnostic [4,
12, 28, 63, 64].
Par ailleurs, les réseaux de neurones possèdent des caractéristiques permettant la
résolution de problèmes complexes, à savoir [12, 14, 17, 20, 26, 30, 31, 32, 64] :
La capacité de classification des signatures et des formes, ce qui correspond bien au cas
étudié dans le présent travail ;

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
25
Le RNA peut apprendre des règles à partir des exemples (défauts) c’est à dire qu’on peut
élaborer avec un RNA un modèle non paramétrique qui peut décrire tous les états de la
machine (fonctionnements normaux et anormaux) et, en plus, ce modèle peut généraliser
son identification à d’autres exemples qui n’ont pas été appris ;
La capacité de mémorisation des exemples, en les distribuant sur les poids de connexion
de la structure, telles que la perte d’un neurone ou d’une connexion, n’influe pas sur la
mémorisation des exemples ;
A la lumière de l’analyse critique des méthodes de diagnostic, il est clair que les méthodes
internes (qui se basent sur la modélisation physique ou fonctionnelle du processus) ne
peuvent pas bénéficier de modèles exacts pour les systèmes non linéaires (tels que la machine
asynchrone). En effet, ce type de méthodes ne peut être appliqué avec succès qu’aux
systèmes linéaires ou aux systèmes dont les modèles sont parfaitement connus.
8. Position du problème à résoudre
D’après l’analyse détaillée de l’état de l’art, il a été constaté que :
- les systèmes électromécaniques permettant la transformation de l’énergie électrique en
énergie mécanique et le contrôle de l’énergie ainsi obtenu, sont à l’origine (source) du
mouvement nécessaire pour la réalisation de tous les processus industriels. A cet effet,
ils consomment plus de 54% de l’énergie produite dans le monde ;
- Les machines asynchrones (qui représentent 98% des moteurs utilisés dans le monde)
sont les éléments les plus importants des systèmes électromécaniques, car ils
déterminent en grande partie les indices énergétiques (rendement, pertes d’énergie,
facteur de puissance, etc.) ;
- Les études statistiques effectuées ont démontrées que les défauts les plus fréquents
sont les défauts électriques (statoriques et rotoriques) qui représentent entre 70% et
80% des défauts ;
- Les grandeurs indicatrices les plus représentatives des défauts électriques sont: les
courants statoriques, les tensions d’alimentation et la vitesse de rotation ;
- Des variations des valeurs et du contenu spectral des grandeurs indicatrices sont
constatées en présence des défaillances (reflétant le comportement de la machine en
cas de défauts), ce qui permet de considérer les signaux obtenus en qualité de
signatures de référence qui permettront d’identifier les types des défauts dès leurs
apparition ;

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
26
- Les systèmes de diagnostic existants utilisent des méthodes: internes et externes et ils
doivent permettre la détection du défaut et l’identification de son origine afin qu’il
puisse être isolé. A cet effet, le système de diagnostic doit: interférer le moins possible
avec le système électromécanique, être capable de suivre et de stocker toutes les
données relatives aux grandeurs indicatrices, être évolutif et pilotable à distance ;
- La méthodologie de diagnostic doit permettre la comparaison du comportement sain
(ou de son modèle) avec le comportement du procédé défaillant et d’en déduire le type
de défaut et son origine ;
- L’analyse des avantages et des inconvénients des différentes méthodes de diagnostic :
internes (méthodes du modèle, de redondances, etc.) et externes (réseaux de neurones,
système expert et logique floue) permet de conclure que la méthode basée sur les
réseaux de neurones artificiels est la plus rationnelle pour la classification des signaux
caractéristiques des défaillances des systèmes électromécaniques en général ;
- L’analyse des méthodes d’identification des défauts électriques (statoriques et
rotoriques) des machines asynchrones a permis de constater les insuffisances
suivantes :
Limitation à l’analyse harmonique des signatures des grandeurs indicatrices
(courants, vitesse et couple) en utilisant la théorie des champs et les modèles
multi-enroulement ;
Utilisation de modèles non précis ;
Nécessité de multiplication du nombre de modèles ;
Non prise en compte du vieillissement de la machine ;
L’utilisation d’une seule grandeur indicatrice, chose qui réduit le degré de
confiance.
- Complexité de développement et prix élevé des systèmes de diagnostic basés sur les
systèmes experts et la logique floue.
Par conséquent et à la lumière de ce qui a été dit, le présent travail sera consacré à
l’élaboration d’un système intelligent de surveillance et de diagnostic automatique en temps
réel des défaillances électriques (statoriques et rotoriques) des moteurs asynchrones à rotor
bobiné et rotor en court-circuit en utilisant les réseaux de neurones artificiels et une
multitudes des grandeurs indicatrices.

Chapitre1- Etude de la problématique du diagnostic des défaillances d’une machine asynchrone
27
9. Conclusion du premier chapitre
Le présent travail sera consacré à l’étude des défauts électriques (statoriques et
rotoriques) des machines asynchrones (à rotor en court-circuit et à rotor bobinés). A cet effet,
les grandeurs indicatrices choisies sont: les courants statoriques, les tensions d’alimentation et
la vitesse de rotation.
Par ailleurs, les valeurs et le contenu spectral des grandeurs indicatrices en cas des
défaillances (symptômes des défaillances) seront utilisés en qualité de signatures de
références (permettant d’identifier le type du défaut) et qui seront obtenus que ce soit par
modélisation (chapitres 2 et 3) ou expérimentalement (chapitre 4).
D’autre part, le système automatique de diagnostic qui sera élaboré (chapitre 5) doit
permettre : la détection des défauts, l’identification de leurs origines et la prise de décision.
Pour ce faire, la méthodologie de diagnostic choisie doit permettre de comparer à chaque
instant le comportement sain de la machine asynchrone avec son comportement en présence
de défaut.
Par ailleurs, pour permettre la classification des signatures des défauts, la technique
choisie en raison de ces avantages (capacité : de classification des signatures, de
mémorisation et de généralisation) est celle des réseaux de neurones artificiels.

Chapitre2Modélisation de la machine asynchrone en vue
d’étudier son comportement dans le régime normal et anormal de fonctionnement

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
28
Chapitre 2 - Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
1. Introduction
Le comportement électrique et dynamique d’un système ne peut être étudié que s’il est
possible de le représenter par un modèle mathématique, (c’est ce qu’on appelle modélisation).
Il est donc évident que cette étape de modélisation est un passage indispensable pour
concevoir des systèmes de commande performants [65, 66, 67].
A cet effet, nous avons pris comme point de départ un rappel sur le modèle mathématique
de la machine généralisée, suivi d’une simplification des équations par la transformation de
PARK, en vue de représenter la machine asynchrone triphasée en machine biphasée
équivalente, et après un choix convenable du référentiel, on déduit le modèle de la machine
asynchrone alimentée en tension.
Les machines asynchrones à rotor en court-circuit consomment plus de 40% de l’énergie
électrique produite dans le monde [19, 20, 54] ; elles sont largement utilisées en raison des
avantages qu’elles présentent, à savoir :
- la simplicité de construction et la robustesse ;
- le fonctionnement sans génération d’étincelles d’où un entretien réduit ;
- la normalisation des réseaux de distribution de l’énergie électrique se prête bien à
l’utilisation directe de ces moteurs (tensions et fréquences constantes) ;
- un prix de revient relativement faible ;
- un rapport masse/puissance favorable.
Par ailleurs, La machine asynchrone, malgré ses qualités, peut présenter des défauts
structurels, dans ce chapitre nous portons notre attention sur la rupture totale ou partielle de
barres rotoriques (tout particulièrement au niveau de la brasure barre- anneau). Pour ce faire,
il convient de développer un modèle qui tient compte de la structure du rotor.
En effet, Pour étudier ces machines à induction on fait appel soit à la théorie du champ
électromagnétique (équations de Maxwell), soit à la théorie des circuits électriques (lois de
Kirchhoff); ou bien à la méthode mixte combinant la théorie du champ électromagnétique et
la théorie des circuits électriques [20].

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
29
2. Modèle d’étude
Il est fonction du type d’approche utilisée [20, 39, 54]. On en distingue deux, assez
complémentaires :
- une approche dite « locale » car basée sur la signature de grandeurs locales telles que la
densité du flux ; il s’agit souvent de méthodes numériques par éléments finis permettant
une analyse fine des phénomènes physiques locaux associés aux défauts de cages ;
- une approche analytique basée, quant à elle sur la signature de grandeurs externes globales
telles que: courants, couple électromagnétique; elle utilise le modèle de Kirchhoff (réseau
électrique équivalent à la machine) ainsi que la transformation « des 2 axes » appliquée
aux équations électriques du système multi-enroulement étudié. Cette approche s’adapte
particulièrement bien au problème posé ici et vu sa simplicité nous l’avons adopté comme
démarche, pour la réalisation de la suite du travail.
En vue de simplifier la modélisation de la machine, on va admettre les hypothèses
simplificatrices suivantes [20, 65, 66, 67, 68, 69, 70, 71] :
- entrefer constant ;
- effet des encoches négligé ;
- distribution spatiale sinusoïdale des forces magnétomotrices d’entrefer ;
- circuit magnétique non saturé et à perméabilité constante ;
- pertes ferromagnétiques négligeables ;
- l’influence de l’effet de peau et de l’échauffement sur les caractéristiques n’est pas
prise en compte ;
Parmi les conséquences importantes des hypothèses suscitées, on peut citer :
- l’additivité des flux ;
- la constance des inductances propres ;
- la loi de variation sinusoïdale des inductances mutuelles entre les enroulements
statoriques et rotoriques en fonction de l’angle électrique de leurs axes
magnétiques.
3. Schéma équivalent multi enroulements
Pour l’étude analytique des performances des moteurs à induction avec dissymétries
rotoriques, nous avons adopté le schéma multi enroulements équivalent qui s’adapte bien au
problème posé [20, 39], car il décrit le rotor comme un ensemble de mailles interconnectées

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
30
entre elles, chacune formée par deux barres adjacentes et les portions d’anneaux qui les relient
(figure 2.5) [20].
A partir d’hypothèses classiques qui supposent que la perméabilité du fer est infinie, que
l’entrefer est lisse et constant et que la F.M.M statorique est à distribution sinusoïdale, on
calcule les différentes inductances propres et mutuelles qui interviennent dans les équations
du circuit.
3.1. Calcul des inductances
a. Stator
L’induction due à la bobine statorique de la phase m s’écrit [20, 54]:
3
2cos
2)( 0
mpIep
NsB smsm (2.1)
Par conséquent, le flux principal et l’inductance cyclique sont donnés par:
smpsm RLIep
Ns
²
²40
(2.2)
slslspsc LRLep
NslLL
²
²6
2
30
(2.3)
b. Rotor
Le rotor à cage est représenté par la figure.2.1. La figure.2.2 représente la forme d’onde de l’induction produite par la maille rotorique k.
Ie
Irk
Ir(k+1)
Irb(k-1)Ir(k-2)
Ir(k-1)
Irk
L
Irb(k-1)
Irb(k-2)
Irbk
Irb(k+1)
Irb(k-3)
Figure.2.1. Structure du rotor

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
31
rkI Représente le courant de maille k et bkI le courant de barre K , avec:
)1( krrkbk III (2.4)
On voit bien, à partir de la figure.2.2 qu’il n’est pas possible de retenir l’hypothèse du
premier harmonique en ce qui concerne l’induction produite par une maille du rotor. Partant
de la répartition de l’induction magnétique (voir figure.2.2), on peut calculer l’inductance
principale d’une maille rotorique ainsi que la mutuelle entre deux mailles de la manière
suivante :
LReNr
NrLrp
2²
1 0 (2.5)
LReNr
Mrr 2
²
1 0 (2.6)
c. Stator Rotor
L’induction produite par la bobine statorique de la phase m induit dans la maille
rotorique K le flux exprimé par :
''
2
2
LRdBSd
SB
NrNrk
p
NrNrk
p
smrk
rk
smsmrk
(2.7)
3
2'sin
122
2
0
mp
pLRNsI
ep
NrNrk
p
NrNrk
p
smsmrk (2.8)
Figure.2.2. Induction produite par une maille du rotor

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
32
Il en résulte la mutuelle stator rotor entre la phase statorique m et la maille rotorique K ,
donné par la formule :
kmMM srsmrk
3
2cos (2.9)
Où
2sin
²
4 0
NsLRep
M sr (2.10)
Et Nr
p 2
est l’angle électrique entre deux mailles rotoriques.
3.2. Mise en équations
Nous utilisons la transformation de Clarke pour passer des grandeurs triphasées
statoriques (a, b, c) aux grandeurs diphasées ( ), . Nous pouvons effectuer la simulation
avec deux repères distincts pour le stator et le rotor [26].
En vue de diminuer le temps de calcul, on élimine l’angle de la matrice de couplage en
choisissant le repère le plus adéquat et qui est celui du rotor. Dans ce repère, toutes les
grandeurs ont une pulsation sgW en régime permanent. Cette caractéristique peut être utilisée
pour l’analyse de rupture de barres rotoriques dans la machine par l’observation du
courant Ids .
a. stator
On déduit pour l’ensemble des phases statoriques
Vsabc = Rs sabcdt
dsabcI (2.11)
Après transformation et rotation, les équations électriques dans le repère rotorique s’écrivent:
Figure.2.3. Position de la maille rotorique K , par rapport à la bobine
statorique de la phase 0m

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
33
dt
dWIRsV
dsqsdsds
(2.12)
dt
dWIRsV
qsdsqsqs
(2.13)
Avec:
)1(
0
)1sin(sin0sin
)1(coscos0cos
0
0
Nrr
rj
r
qs
ds
sc
scsdq
I
I
I
Nrj
NrjMsr
I
I
L
L
(2.14)
Donc:
)1(10 )1cos(.....cos.....1cos0cos Nrrrjrrdsscds INrIjIIMsrIL (2.15)
De la même façon pour qs
)1(10 )1sin(.....sin.....1sin0sin Nrrrjrrqsscqs INrIjIIMsrIL (2.16)
Après dérivation des équations (2.52) et (2.53), on aboutit à:
)1(
0
)1cos(cos0cos
Nrr
rj
r
dssc
ds
I
I
I
dt
dNrjMsr
dt
dIL
dt
d
(2.17)
Et:
)1(
0
)1sin(sin0sin
Nrr
rj
r
qssc
qs
I
I
I
dt
dNrjMsr
dt
dIL
dt
d
(2.18)
On remplace les expressions des flux (2.15), (2.16), (2.17) et (2.18) dans les équations (2.12)
et (2.13).
Nous obtenons :

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
34
))1cos(.....cos.....1cos0(cos
))1sin(.....sin.....1sin0(sin
)1(10
)1(10
dt
dINr
dt
dIj
dt
dI
dt
dIMsr
dt
dIL
INrIjIIMsrILWIRsV
Nrrrjrrdssc
Nrrrjrrqsscdsds
(2.19)
Et:
))1sin(.....sin.....1sin0(sin
))1cos(.....cos.....1cos0(cos
)1(10
)1(10
dt
dINr
dt
dIj
dt
dI
dt
dIMsr
dt
dIL
INrIjIIMsrILWIRsV
Nrrrjrrqssc
Nrrrjrrdsscqsqs
(2.20)
En écrivant les équations (2.19) et (2.20) sous la forme:
IRVIdt
dL (2.21)
On obtient :
))1sin(.....sin.....0(sin
))1cos(.....cos.....0(cos
)1(0
)1(0
Nrrrjrqssc
dsdsNrrrjrds
sc
INrIjIMsrWILW
IRsVdt
dINr
dt
dIj
dt
dIMsr
dt
dIL
(2.22)
Et:
))1cos(.....cos.....0(cos
))1sin(.....sin.....0(sin
)1(0
)1(0
Nrrrjrdssc
qsqsNrrrjrqs
sc
INrIjIMsrWILW
IRsVdt
dINr
dt
dIj
dt
dIMsr
dt
dIL
(2.23)
b. rotor
Le rotor à cage est représenté par la figure (2.4)
Où:
rkI Représente le courant de maille K , bkI le courant de la barre K .
Pour le nœud n° 1 :
)1( krrkbk III (2.24)
Pour le nœud n° 2 :
rkkrkb III )1()1( (2.25)
Figure.2.4 Représentation d’une maille rotorique
Iek
2 1
43
IrkIr(k+1)Ir(k-1)
Irk
Rbk
Ibk Ib(k-1)
Rb(k-1)
Re/Nr
Re/Nr

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
35
L’équation électrique relative à la maille K peut être écrite sous la forme:
dt
dIIRII
NrIIRI
Nr
rkkrrkbkerkrkkrkbrk
)1()1()1(
ReRe0 (2.26)
En remplaçant les formules (2.24) et (2.25) dans l’équation (2.26); l’équation électrique
relative à la maille K devient
dt
dIRII
NrIRI
Nr
rkbkbkerkkbkbrk
ReRe0 )1()1( (2.27)
Le flux induit dans la maille rotorique est donné par:
)()()sincos(2
3)1(
1
0
bkkbbekrke
qsdssr
Nr
kjj
rjrrrkrprk IILIINr
LKIKIMIMIL
(2.28)
Le terme en rpL représente le flux principal, celui en rrM représente le flux mutuel avec
les autres mailles rotoriques, puis viennent les termes de couplage avec le stator. On peut
relever le facteur 23 par rapport à l’équation statorique à cause de la transformation de Clark.
Les termes en bL et eL représentent les fuites rotoriques [20].
Pour pouvoir écrire l’équation (2.28) uniquement en fonction des courants de maille, on
utilise les formules (2.24), (2.25) ainsi que l’équation :
ekerk III (2.29)
Où: eI représente le courant de l’annaux de court circuit
Donc:
)1()1(
1
0
)sincos(2
3
krrkrkkrb
eke
rke
qsdssr
Nr
kjj
rjrrrkrprk
IIIIL
INr
LI
Nr
LKIKIMIMIL
(2.30)
)1()1(
1
0
2
)()sincos(2
3
krrkkrb
erke
rke
qsdssr
Nr
kjj
rjrrrkrprk
IIIL
IINr
LI
Nr
LKIKIMIMIL
(2.31)
rkbkrkrb
ee
rke
qsdssr
Nr
kjj
rjrrrkrprk
ILIIL
INr
LI
Nr
LKIKIMIMIL
2
2)sincos(
2
3
)1()1(
1
0
(2.32)
Finalement, on aboutit à:

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
36
ee
qsdssrkrkrb
Nr
kjj
rjrrrkbe
rprk
INr
L
KIKIMIILIMILNr
LL
sincos
2
32
2)1()1(
1
0 (2.33)
- On obtientdt
d rk
dtdI
Nr
L
kdt
dIk
dt
dIM
dt
dI
dt
dIL
dt
dIM
dt
dIL
Nr
LL
dt
d
ee
qsdssr
krkrb
Nr
kjj
rjrr
rkb
erp
rk
)sincos(
2
3)()2
2(
)1()1(1
0
(2.34)
En remplaçantdt
d rk dans l'équation (2.27)
dt
dI
Nr
Lk
dt
dIk
dt
dIM
dt
dI
dt
dIL
dt
dIM
dt
dIL
Nr
LLIIRI
NrI
NrIIRI
Nr
eeqsdssr
krkrb
Nr
kjj
rjrr
rkb
erpkrrkbkrkerkkrkbrk
)sincos(2
3)(
22RRR
0
)1()1(1
0
)1(ee
1)1(e
(2.35)
En écrivant l’équation (2.35) sous la forme :-
L dt
Id = IRV
On obtient :
ekrbkkrkbrkkbbkee
qsdssr
krkrb
Nr
kjj
rjrr
rkb
erp
INr
IRIRIRRNrdt
dINr
L
kdt
dIk
dt
dIM
dt
dI
dt
dIL
dt
dIM
dt
dIL
Nr
LL
e)1()1()1()1(
e
)1()1(1
0
RR2
)sincos(2
3)()2
2(
(2.36)
Si on considère que notre modèle à 16 barres (Nr = 16) on peut déduire :
Pour k = 0:
erbNrrNrbrNrbbee
qsdssr
rNrrb
j
rjrr
rb
erp
INr
IRIRIRRNrdt
dINr
L
dt
dI
dt
dIM
dt
dI
dt
dIL
dt
dIM
dt
dIL
Nr
LL
e10)1()1(0)1(0
e
1)1(15
1
0
RR2
)0sin0cos(2
3)()2
2(
(2.37)

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
37
Pour k=1:
erbrbrbbee
qsdssr
rrb
jj
rjrr
rb
erp
INr
IRIRIRRNrdt
dINr
L
dt
dI
dt
dIM
dt
dI
dt
dIL
dt
dIM
dt
dIL
Nr
LL
e2100101
e
2015
10
1
RR2
)1sin1cos(2
3)()2
2(
(2.38)
et de la même façon pour les autres barres:
Pour l'anneau de court circuit
1
0
1
0
ee
RR
Nr
k
Nr
k
rkerkee
e INr
Idt
dI
Nr
L
dt
dIL (2.39)
Le système complet L dt
Id = IRV devient:
e
Nrr
rj
r
eee
eb
erpbrrrrrrbrr
srsr
rrrrbrrbe
rpbrr
ebrrrrrrbrrb
erp
srsc
srsc
I
I
I
I
IqsIds
LNr
L
Nr
L
Nr
LL
Nr
LLLMMMLM
kMkM
MMLMLNr
LLLM
Nr
LLMMMLML
Nr
LL
jMLjML
)1(
0
00
22
sin2
3cos
2
3
22
22
0sin00cos0
0
0
0
0
0
0
Vqs
Vds
eee
e)1()2(
e)2()1(
)1(e
)1(
e)1(0)1(0
e
RRR
00
RR20000
00
0R
2000
00
R00
R200
0cos
0sin
NrNr
NrRR
NrRR
RRRNr
R
NrRRRR
Nr
jWMRWL
jWMWLR
NrbNrbNrbNrb
bkkbbkkb
NrbbNrbb
srssc
srscs
e
Nrr
rj
r
I
I
I
I
Iqs
Ids
)1(
0
(2.40)

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
38
q
Ir1
Ir12
Ir13
Ir(Nr-6)
θ
Ir8
I1
Ir(Nr-2)
β
2 / α
Ir6
Le couple électromagnétique est obtenu par dérivation de co-énergie:
)cos(
)cos(
2
3
kMsr
kMsrIsdqPCe t
rkI (2.41)
1
0
1
0
cossin2
3 Nr
k
rk
Nr
k
qsrkdssr kIIkIIPMCe (2.42)
On y ajoute les équations mécaniques afin d'obtenir la valeur de la vitesse =P
W
dt
d)(
1W
P
fCrCeP
J (2.43)
Et Wdt
d
Le système ci-dessus (2.40) est très compliqué et difficile à programmer. En plus,
l’exécution de sa simulation est très lente [20, 54], c’est pour cela qu’on a optés pour un autre
modèle, c-à-d le modèle dq . Pour ce faire, nous avons appliqué une transformation
généralisée ( Nr ) qui permet de passer des Nr grandeurs équilibrées vers deux grandeurs dq .
La simulation de ce modèle est plus rapide [20].
4. La transformation de Nr grandeurs équilibrées vers deux grandeurs dq
Figure.2.5 Projection du modèle multi enroulements sur le modèle dq
dIr0

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
39
La projection de 1I sur les axes rkI (voir figure.2.5) donne:
)16
30cos(1
)16
4cos(1
)16
2cos(1
cos1
15
2
1
0
II
II
II
II
r
r
r
r
(2.44)
Tandis que la projection de 1I sur les axes d et q donne:
(2.45)
D’où:
)
16
30cos()
16
30cos()
16
2cos()
16
2cos(coscos
16
2cos
(2.46)
Et:
)
16
30cos()
16
30sin()
16
2cos()
16
2sin(cossin
16
2sin
(2.47)
A partir de l'équation (2.44) on trouve:
cos1
0rII ;
)16
2cos(
11
rII ;
)16
4cos(
12
rII ;. . . . . . ;
)16
30cos(
115
rII
En remplaçant les équations (2.46) et (2.47) dans l'équation (2.45) on trouve:
)
16
30cos()
16
4cos()
16
2cos(cos
16
215210
rrrr IIIIId (2.48)
)
16
30sin()
16
4sin()
16
2sin(sin
16
215210
rrrr IIIIIq (2.49)
)sin(1
)cos(1
IIq
IId

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
40
Ensuite on peut déduire sous forme matricielle on trouve:
15
2
1
0
)16
30sin()
16
4sin()
16
2sin(sin
)16
30cos()
16
4cos()
16
2cos(cos
16
2
r
r
r
r
I
I
I
I
Iq
Id
(2.50)
Iq
Id= A
15
2
1
0
r
r
r
r
I
I
I
I
En posant 0 , l’équation (2.50) devient:
A =
)16
30sin()
16
4sin()
16
2sin(0sin
)16
30cos()
16
4cos()
16
2cos(0cos
16
2
(2.51)
Et:
1A =
)16
30sin()
16
30cos(
)16
4sin()
16
4cos(
)16
2sin()
16
2cos(
0sin0cos
(2.52)
4.1. la matrice de résistance du modèle dq équivalent
R eq = 1ARA aa (2.53)

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
41
(2.54)
Passage du modèle polyphasé au modèle biphasé
A fin de simplifier le calcul de la matrice ci-dessus, on la subdivise en neufs résistances
équivalentes, cette subdivision nous permet de mieux comprendre, le passage du modèle de
Nr grandeurs vers deux grandeurs dq .
1) pour 1R
11 RR eq
ssc
scseq
RWL
WLRR1 (2.55)
2) pour 2R
ARR eq 22 -1 (2.56)
eqR2 =
jWM
jWM
sr
sr
cos
sin
)16
30sin()
16
30cos(
)16
4sin()
16
4cos(
)16
2sin()
16
2cos(
0sin0cos
(2.57)
987
654
321
00
20000
00
02000
00
00200
0cos
0sin
)1()2()2()1(
)()1()1(
)1(0)1(0
RRR
RRR
RRR
RNr
R
Nr
R
Nr
RRbRb
Nr
RRbRb
RbRbRbNr
RRb
Nr
RRbRbRbRb
Nr
R
jWMRWL
jWMWLR
eee
e
NrNre
NrNr
kkke
k
eNrNr
e
srssc
srscs

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
42
eqR2 =
15
0
15
0
2
15
0
215
0
))(sincos(cos
sin))(cossin(
j
j
sr
j
j
sr
j
j
sr
j
j
sr
jjWMjWM
jWMjjWM
(2.58)
Avec:
15
0
))(cos(sinj
j
jj =0 (2.59)
15
0
2sinj
j
j =2
Nr (2.60)
15
0
2cosj
j
j =2
Nr (2.61)
15
0
))(sin(cosj
j
jj = 0 (2.62)
En remplaçant les formules (2.59), (2.60), (2.61) et (2.62) dans la matrice (2.58) on aboutit à:
eqR2 =
02
20
sr
sr
MWNr
MWNr
(2.63)
3) pour 3R
eqR3 = 3R
(2.64)
4) pour 4R
eqR4 = AR4 (2.65)
eqR4 =
00
00
)16
2sin()
16
2sin()
16
2sin(0sin
)16
2cos()
16
4cos()
16
2cos(0cos
16
2
(2.66)
eqR4 =
00
00 (2.67)
5) pour 5R
eqR5 = ARA 5 -1 (2.68)
0
03 eqR

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
43
On multiplie les trois matrices suivantes :
eqR5 = *)
16
30sin()
16
4sin()
16
2sin(0sin
)16
30cos()
16
4cos()
16
2cos(0cos
16
2
*
Re200
0Re
20
00Re
2
)1()2()2()1(
)1()1(
)1(0)1(0
NrbNrbNrbNrb
bkkbbkkb
NrbbNrbb
RRNr
RR
RRRNr
R
RRRRNr
(2.69)
Donc on trouve:
eqR5
43
21
AA
AA (2.70)
On calcule les différentes sous matrices )4,3,2,1( AetAAA ;
A1=
15cos
Re21cos
Re20cos
Re2
16
2 21514
201
2150 bbbbbb RR
NrRR
NrRR
Nr
- 0cos15cos2cos1cos1cos0cos16
41510 bbb RRR (2.71)
A2=
15sin15cos
Re21sin1cos
Re20sin0cos
Re2
16
2151401150 bbbbbb RR
NrRR
NrRR
Nr
+ 0cos15sin2cos1sin1cos0sin16
21510 bbb RRR
+ 0sin15cos2sin1cos1sin0cos16
21510 bbb RRR (2.72)
)16
30sin()
16
30cos(
)16
4sin()
16
4cos(
)16
2sin()
16
2cos(
0sin0cos

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
44
A3=
15sin15cos
Re21sin1cos
Re20sin0cos
Re2
16
2151401150 bbbbbb RR
NrRR
NrRR
Nr
+ 0cos15sin2cos1sin1cos0sin16
21510 bbb RRR
+ 0sin15cos2sin1cos1sin0cos16
21510 bbb RRR (2.73)
A4=
15cos
Re21cos
Re20cos
Re2
16
2 21514
201
2150 bbbbbb RR
NrRR
NrRR
Nr
- 0cos15cos2cos1cos1cos0cos16
41510 bbb RRR (2.74)
Si on considère que toutes les barres sont saines ( 1510 bbb RRR ) les sous matrices
4,3,2,1 AetAAA peuvent être écrites sous la forme:
1A 4A cos12Re
2 bRNr
032 AA
En posant:
cos12Re
2 bRNr
Rr
6) pour 6R
eqR6 = 6RA (2.75)
r
e
r
e
eq
N
L
N
L
j
j
NrR
...sin...
...cos...26
(2.76)
Nr
j
Nr
jeq
jNr
Le
jNr
Le
NrR
0
0
sin
cos2
6
(2.77)
Avec:
0cos15
0
j
j (2.78)

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
45
0sin15
0
j
j (2.79)
En remplaçant les formules (2.115) et (2.116) Dans la formule (2.114) on peut écrire :
0
06 eqR (2.80)
7) pour 7R
eqRR 77
007 eqR (2.81)
8) pour 8R
ARR eq 88 -1 (2.82)
jjNrNr
R eq sincosRe
......Re
8 (2.83)
1
0
1
0
sinRe
cosRe
8Nr
j
Nr
j
eq jNr
jNr
R (2.84)
En remplaçant la formule (2.78) et (2.79) Dans la formule (2.84 ) on obtient:
008 eqR (2.85)
9) pour 9R
99 RR eq
Re9 eqR
Finalement:
La nouvelle matrice de résistance du modèle dq équivalent, en considérant que toutes les
barres sont saines pourra être présentée sous la forme [20]:
Re0000
0000
0000
002
02
0
Re
Rr
Rr
WMNr
RsWL
WMNr
WLRs
srsc
srsc
q (2.86)

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
46
Avec:
cos12Re
2 bRNr
Rr
4.2. La matrice d’inductance du modèle dq équivalent [20]
ALAL aaeq -1 (2.87)
eee
eb
erpbrrrrrrbrr
srsr
rrrrbrrbe
rpbrr
ebrrrrrrbrrb
erp
srsc
srsc
LNr
L
Nr
L
Nr
LL
Nr
LLLMMMLM
kMkM
MMLMLNr
LLLM
Nr
LLMMMLML
Nr
LL
jMLjML
00
22
sin2
3cos
2
3
22
22
0sin00cos0
987
654
321
LLL
LLL
LLL
(2.88)
Passage du modèle polyphasé au modèle biphasé:
De la même manière que pour (2.53) la matrice R il résulte:
sc
sceq
L
LL
0
01 (2. 89)
sr
sr
eq
MNr
MNr
L
20
022 (2.90)
0
03 eqL (2.91)
sr
sr
eq
M
ML
2
30
02
3
4 (2.92)

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
47
rc
rceq
L
LL
0
05 (2.93)
0
06 eqL (2.94)
007 eqL (2.95)
008 eqL (2.96)
eeq LL 9 (2.97)
Finalement ; La nouvelle matrice d’inductance du modèle dq équivalent, en considérant que
toutes les barres sont saines pourra être présentée sous la forme [6]:
e
rcsr
rcsr
srsc
srsc
sq
L
LM
LM
MNr
L
MNr
L
L
0000
002
30
0002
3
02
00
002
0
(2.98)
Avec:
cos122 be
rrrprc LNr
LMLL
Donc en considérant que toutes les barres sont saines on pourra écrire le modèle global sous la
forme:
e
rcsr
rcsr
srsc
srsc
L
LM
LM
MNr
L
MNr
L
0000
002
30
0002
3
02
00
002
0
Ie
Iqr
Idr
Iqs
Ids
dt
d
0
0
0
Vqs
Vds
Re0000
0000
0000
002
02
0
Rr
Rr
WMNr
RsWL
WMNr
WLRs
srsc
srsc
Ie
Iqr
Idr
Iqs
Ids
(2.99)

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
48
t(s)
Ce(
N.m
)
t(s)
t(s)
5. Simulation du modèle dq
Pour simuler le modèle ci-dessus, on utilise les paramètres de la machine présentée en
annexe [20] (voir Annexe.1). Sur les figures qui suivent sont présentés les résultats obtenus
par simulation du modèle dq . Les figures (2.6), (2.7), (2.8), et (2.9) montrent l’évolution de la
vitesse, du couple, du courant statorique, ainsi que les courants des quatre premières barres
rotoriques. Le démarrage de cette machine s’effectue à vide. Nous constatons que le temps
d’établissement de ces variables est rapide (0.23 s).
Le couple atteint une valeur maximale de 18.5 N.m, avant de se stabiliser à une valeur nulle
en régime permanent.
A l’instant t = 0.4s on applique un couple résistant nominal de 3.5 N.m, qui nous permet de
constater que le couple électromagnétique rejoint sa valeur pour compenser cette sollicitation
avec une réponse quasiment instantanée. Une décroissance de la vitesse qui se traduit par un
glissement.
W(r
ad/s
)
Figure.2.6 Evolution de la vitesse (cas d’un moteur sain)
Figure.2.7. Evolution du couple (cas d’un moteur sain)

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
49
t(s)
Ias(
A )I b
r(i)(A
)
t(s)
Figure.2.9 Evolution des courants rotoriques (cas d’un moteur sain)
Figure.2.8. Evolution de du courant statorique (cas d’un moteur sain)

Chapitre 2- Modélisation de la machine asynchrone en vue d’étudier son comportement dans le régime normal et anormal de fonctionnement
50
6. Conclusion du deuxième chapitre
Le deuxième chapitre a été consacré à l’élaboration du modèle mathématique de la
machine asynchrone triphasée (à partir des équations de la machine généralisée) et à sa
simulation numérique (en utilisant le logiciel " MATLAB"), chose qui nous a permis
d’obtenir les différentes caractéristiques de la machine asynchrone alimentée par une source
de tension triphasée.
Pour ce faire, nous avons considéré, en premier lieu, la cage en qualité d’une seule masse,
ensuite, elle a été considérée comme étant constituée de barres adjacentes interconnectées
entre elles. En effet, pour pouvoir étudier le comportement de la machine dans le cas de
défauts rotoriques ; nous avons modélisé la machine asynchrone, en considérant que le rotor
est constitué de Nr mailles. Il est à signaler que le modèle élaboré (en régime sain) a donné
des résultats identiques à ceux obtenus avec le modèle classique de Park.
Par ailleurs, en vue d’étudier les défauts rotoriques, la machine asynchrone a été traitée en
terme de circuits, et on a considéré que le rotor est constitué de plusieurs éléments. En effet,
chaque élément de la cage a été décrit par un circuit électrique équivalent de Nr grandeurs.
Ensuite, en vue de faciliter l’étude, nous avons procédé à la transformation de Nr grandeurs
vers deux grandeurs.
Le modèle obtenu sera utilisé dans le chapitre suivant pour étudier le comportement de la
machine asynchrone en cas de défauts rotoriques et statoriques.

Chapitre3 Etude du comportement de la machine
asynchrone en présence de défauts

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
51
Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
1. Introduction
Dans ce chapitre nous allons présenter la modélisation de la machine asynchrone, en
prenant en considération les défauts d’alimentation, les défauts statoriques et rotoriques de la
machine. Le modèle élaboré précédemment dans le deuxième chapitre sera utilisé pour la
modélisation des défauts considérés.
A cet effet, pour la modélisation des défauts d’alimentation, on effectuera des
modifications au niveau des tensions Vds et Vqs, chose qui permet de révéler les différents
types de défauts d’alimentation (coupures et déséquilibres de tension). Afin de pouvoir
modéliser les défauts statoriques tels que les courts-circuits entre spires de la même phase, il
suffit d’introduire des coefficients dans les matrices des résistances et inductances statoriques
et ainsi que les inductances mutuelles stator-rotor. Ces coefficients tiennent compte de
différence entre le nombre de spires en court-circuit et le nombre total des spires de la même
phase; de cette manière on obtient le nombre de spires utiles. Enfin, pour modéliser les
défauts rotoriques (coupure d’une ou de plusieurs phases) il faut modifier les valeurs des
coefficients A1, A2, A3, et A4 (dans le premier chapitre ils ont été calculé à l’état sain de la
machine).
Par ailleurs, tous les défauts considérés, seront utilisés pour la constitution de la base
de données qui servira à l’élaboration du système automatique de diagnostic des défaillances
de la machine asynchrone.

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
52
2. Etude du comportement de la machine asynchrone en cas de défaut de la tension
d’alimentation (partie statorique)
Dans ce qui suit, on va étudier le comportement électrique et mécanique du moteur
lorsque ce dernier est soumis à des déséquilibres statoriques. Chose qui a lieu dans le cas de
défauts de tension d'alimentation pendant une période de fonctionnement stationnaire (régime
établi).
2.1. Défaut monophasé de la tension [17, 25, 59]
On désigne par kVas, kVbs et kVcs les tensions de la machine réelle triphasée. Dans le
cas d’un défaut monophasé ; K est un facteur réel pris dans l'intervalle [0 , 1]. Après
application de la transformation de PARK, nous obtenons les tensions biphasées équivalentes
dont les valeurs réduites sont:
Vds = ((2 a k + 2 b) /3)cos (w.t) (3.1)
Vqs = sin (w.t) (3.2)
Ou: a et b sont des valeurs réelles introduites pour définir les différents types de
déséquilibres de la tension d'alimentation.
Avec: a= 1, b= 0.5 pour le défaut monophasé de la tension.
Pour le régime permanent (a=1.5 ; b= 0 ; k=1).
Les résultats de simulation de la coupure de phase (k=0) et pour un manque de tension
d'alimentation (k=0.5) sont représentés sur les figures.3.1, 3.2 qui illustrent les perturbations
engendrées par les défauts monophasés de tension.

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
53
Cou
rant
Ias
(A
)
t(s)
Cou
ple
Ce
(N.m
) V
ites
se W
(ra
d/s)
t(s)
Figure.3.1 Résultats de simulation dans le cas d'une coupure monophasée
de la tension d'alimentation (phase b)
t(s)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
54
2.2. Défaut biphasé de tension [17, 25, 59]
Nous considérons kVas , kVbs , kVcs de la machine réelle subissant un défaut biphasé de
la tension d’alimentation. Après application de la transformation de PARK nous obtenons la
tension biphasée équivalente dont les valeurs réduites sont:
Figure.3.2 Résultats de simulation dans le cas d'un déséquilibre monophasé de la tension
d'alimentation
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
t(s)
t(s)
t(s)
Cou
ple
Ce
(N.m
)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
55
Vds =((2 a k + 2 b /3)cos (w.t) (3.3)
Vqs =k sin (w.t) (3.4)
L'étude est effectuée dans le cas d'une coupure de tension biphasée (k=0) et d'un déséquilibre
biphasé (k=0.5 ), Avec a= 0.5 et b= 1.
Sur les figures.3.3, 3.4 sont illustrées les perturbations engendrées par les défauts biphasés de
la tension.
Figure.3.3 Résultats de simulation dans le cas d'une coupure biphasée de la
tension d'alimentation
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
t(s)
t(s)
t(s)
Cou
ple
Ce
(N.m
)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
56
2.3. Défaut triphasé de tension [17, 25, 59]
Nous considérons kVas, kVbs, kVcs de la machine réelle dans le cas d’un défaut triphasé
du circuit d’alimentation. Après application de la transformation de PARK nous obtenons la
tension biphasée équivalente dont les valeurs réduites sont:
Figure.3.4 Résultats de simulation dans le cas d'un déséquilibre biphasé de la
tension d'alimentation
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
Cou
ple
Ce
(N.m
)
t(s)
t(s)
t(s)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
57
Vds =((2 a k + 2 b /3)cos (w.t) (3.5)
Vqs =k sin (w.t) (3.6)
Où: a =1.5 et b= 0
L’étude est effectuée dans le cas d'une coupure de tension biphasée (k=0) et d'un déséquilibre
triphasé (k=0.5). Sur les figures.3.5, 3.6 sont illustrées les perturbations engendrées par les
défauts triphasés de la tension.
Figure.3.5 Résultats de simulation dans le cas d'une coupure triphasée de la
tension d'alimentation
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
Cou
ple
Ce
(N.m
)
t(s)
t(s)
t(s)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
58
Figure.3.6 Résultats de simulation dans le cas d'un déséquilibre triphasé
de la tension d'alimentation
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
Cou
ple
Ce
(N.m
)
t(s)
t(s)
t(s)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
59
2.4. Interprétation des résultats de simulation (défauts d’alimentation)
A l'aide du logiciel de simulation MATLAB (simulink), ont été obtenues les courbes
représentant les différents régimes anormaux de fonctionnement (défauts) du moteur
asynchrone triphasé.
Les résultats de simulation sont présentées sur les figures (3.1,….,3.6). Ces dernières
représentent les courbes d'évolution des différents paramètres : courant, flux (statorique et
rotorique), vitesse et couple.
Le caractère des graphes montre qu'en phase de démarrage le moteur subit un
allongement du régime transitoire. A titre d'exemple considérons le couple électromagnétique
figures (3.1,…,3.6). L’évolution de ce dernier est caractérisée, au début, par une série
d'oscillations d'amplitude élevée s'amortissant au fur et à mesure de l'accélération du moteur.
Ensuite sa valeur diminue à la fin du régime de démarrage (0.25 secondes), le couple atteint
sa valeur maximale, en s'approchant de la valeur de la charge (couple résistant), et la vitesse
du moteur atteint sa valeur permanente (régime établi). A l'instant t=0.4 secondes le couple
prend une nouvelle valeur (augmentation) qui est due à l'augmentation du couple résistant; la
vitesse à son tour subit une légère diminution.
Dans les régimes anormaux, les grandeurs électriques sont caractérisées (par rapport au
régime normal) par une variation brusque au moment d'apparition du défaut. Dans notre cas,
le défaut est crée lorsque le moteur est en régime établi à l'instant t=0.8 secondes, puis il est
éliminé à l’instant t=1 seconde.
Par ailleurs, il est à signaler que les défauts (coupure, déséquilibre) de la tension
d'alimentation influent aussi sur les comportements mécaniques du moteur, cette influence est
caractérisée par une chute de la valeur de la vitesse selon le type de défaut, ainsi que la
variation (oscillation) du couple électromagnétique. En plus, en analysant les régimes à
défauts pour les différentes grandeurs, nous remarquons que l'évolution du courant statorique
dans les différents cas de défauts est caractérisée par des variations par rapport à l'état normal,
autrement dit, les grandeurs suscités reflètent l’existence de défauts (grandeurs indicatrices).

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
60
3. Etude du comportement de la machine asynchrone en cas de défauts statoriques
Pour modéliser les défauts de court-circuit entre spires, nous allons présenter une autre
méthode de modélisation de la machine asynchrone, en tenant compte des paramètres
évolutifs telles que les résistances et les inductances (c'est-à-dire les matrices des résistances
et des inductances statoriques sont variables) [15, 19, 54, 60, 73]. La modélisation sucitée
nécessite une étude précise et rigoureuse des signatures des défauts de la machine asynchrone.
Par ailleurs, La modélisation classique d'une machine asynchrone triphasé au stator et
au rotor bobiné (si la machine est à cage, on peut considérer le bobinage triphasé équivalent),
repose sur les hypothèses classiques mentionnées dans le deuxième chapitre (paragraphe 2).
A la lumière des dits hypothèses ; la machine peut être modélisée par les équations suivantes :
s s s sU R I P (3.7)
RRR PIR 0 (3.8)
RSRsSfssS IMILM (3.9)
SRRfRRRSR ILMM (3.10)
Où
- P désigne l'opérateur différentiel
- les variables , ,sa sa sa
s sb s sb s sb
sc sc sc
u i
U u I i
u i
représentent les tensions, les
courants, et les flux au stator.
- Les variables ,ra ra
R rb R rb
rc rc
i
I i
i
représentent les courants et les flux au rotor.
Soit Ns le nombre de spires en régime sain de la machine asynchrone. Un court–circuit
statorique conduira à une diminution dans le nombre de spires de chaque phase statorique.
On définit les coefficients de court – circuit suivants :
Coefficient de court – circuit relatif à la 1 ère phase statorique : 1ccsa
s
Nk
N
Coefficient de court – circuit relatif à la 2 ème phase statorique : 2ccsb
s
Nk
N

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
61
Coefficient de court – circuit relatif à la 3 ème phase statorique : 3ccsc
s
Nk
N
Le nombre de spires en court – circuit : ccN
Le nombre de spires utiles pour les trois phases statoriques, est alors donné par :
1 1 (1 )s cc sa s sa SN N N k N f N
2 2 (1 )s cc sb s sb sN N N k N f N
3 3 (1 )s cc sc s sc sN N N k N f N
Les matrices , , ,s sf SS SR RSR L M M et M dépendent des trois coefficients , ,sa sb scf f f
et les inductances sont données par les expressions suivantes :
2
2
2
0 0
0 0
0 0
sa sf
Sf sb sf
sc sf
f L
L f L
f L
2
2
2
/ 2 / 2
/ 2 / 2
/ 2 / 2
sa sa sb sa sc
SS s sa sb sb sc sb
sa sc sc sb sc
f f f f f
M M f f f f f
f f f f f
2 2cos cos cos
3 3
2 2cos cos cos
3 3
2 2cos cos cos
3 3
sa sa sa
SR sb sb sb
sc sc sc
f f f
M M f f f
f f f
Avec TSR RSM M
La résistance de chaque phase statorique est proportionnelle au nombre de spires utiles. Par
conséquent :
La matrice des résistances statoriques [Rs] peut être présentée sous la forme :

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
62
0 0
0 0
0 0
sa
S s sb
sc
f
R R f
f
Remarques
1- Dans le cas où les enroulements du stator sont tous identiques la machine est
équilibrée les trois coefficients sont égaux, on trouve alors le modèle triphasé équivalent
classique.
2- Lorsque le moteur tourne, les coefficients des matrices SR RSM et M ne sont pas
constants, ils varient en fonction de l'angle , position angulaire entre le rotor et le stator.
Ceci rend le modèle triphasé équivalent difficilement utilisable tant en commande qu'en
surveillance, dans l'approche qui suit une transformation mathématique est appliquée sur
les équations du modèle précédent afin de rendre l'ensemble calculable en ligne [19].
3.1 Définition de la matrice de transformation
Le champ magnétique créé par le courant circulant au niveau du rotor a la même
pulsation que celui créé par le courant circulant au stator. Ainsi, le champ magnétique
créé par un courant statorique fictif. La relation entre ce courant fictif et le courant
rotorique est donnée par une transformation mathématique. En utilisant cette
transformation, l'ensemble des variables du rotor (flux et courants) peuvent être
transformées en de nouvelles variables ayant la même pulsation que les variables du
stator. Ainsi, tous les paramètres du modèle seront indépendants de la position angulaire
, la transformation est donné par la matrice suivante[19].
1 2 1 2 1cos cos cos
2 3 2 3 2
2 1 1 2 1cos cos cos
3 2 2 3 2
2 1 2 1 1cos cos cos
3 2 3 2 2
T
(3.11)
On montre facilement que cette matrice est orthogonale i, e.
1 TT T
(3.12)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
63
3.2 Transformation des équations du modèle triphasé
Considérant l'équation (3.9) en introduisant la matrice T comme suit:
1 =
S s s SR R
s s SR R
M I M I
M I M T T I
(3.13)
Ce qui permet d’écrire :
S SS s s SR RM I M I (3.14)
Où :
1=
=
SSR SR
SR R
M M T
I T I
(3.15)
Avec
- / 2 / 2
/ 2 / 2
/ 2 / 2
sa sa scSSR sb sb sc
sc sc sc
f M f M f M
M f M f M f M
f M f M f M
(3.16)
En multipliant à gauche par T l'équation (3.10) on obtient :
1
R RS s R RT M I T M T T I (3.17)
L’équation ci-dessus peut être représentée sous la forme :
S S S SR RS s R RM I M I (3.18)
Où :
1
SRS RS
SR R
SR R
SR R
M T M
M T M T
T
I T I
(3.19)
On peut écrire :
TSSR
SRS MM (3.20)
RSR MM (3.21)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
64
Considérant maintenant l'équation (3.8) RRR PIR 0
De manière équivalente, on a:
1 10 R R RR T T I P T T (3.22)
En multipliant à gauche par T on obtient
110 R R RT R T T I T P T T (3.23)
Où :
10 S S S
R R R RR I T P T P (3.24)
Cette équation peut être écrite sous la forme :
SR
SR
SPRSr
SRR PKwIR 0 (3.25)
Où
0 3 / 3 3 / 3
3 / 3 0 3 / 3
3 / 3 3 / 3 0
SPRSK
(3.26)
Les équations (3.7), (3.8), (3.9), (3.10) représentent un nouveau modèle triphasé dans
lequel tous les paramètres peuvent être calculés.
SSSS PIRU
SR
SR
SPRSr
SRR PKwIR 0
SR
SSRSSS IMIM
SR
SRS
SRS
SR IMIM
Puisque SRM est une matrice de rang plein, elle est inversible. A partir de (3.18) nous
obtenons
1S S S SR R R RS sI M M I
(3.27)
En substituant cette expression dans l'équation (3.25), on obtient :
SR
SR
SPRSrS
SRS
SR
SRR PKwIMMR
10 (3.28)
Où d’une autre manière :
SRS
SRS
SRR
SR
SPRSr
SRR PIMMRKwMR
110 (3.29)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
65
En substituant l'expression de l'équation (3.27) dans l'équation (3.14), on obtient
1S S S SS s s SR R R RS sM I M M M I
(3.30)
qui est équivalent à
1 1+ S S S S S S
S s SR R RS s SR R RM M M M I M M
(3.31)
En utilisant (3.31) et (3.7) on peut déduire :
1 1S S S S S Ss s s s SR R RS s SR R RU R I P M M M M I P M M
(3.32)
Ce qui donne :
1 1S S S S S Ss s s s SR R RS s SR R RU R I M M M M P I M M P
(3.33)
A partir de (3.29) on obtient:
SR
SPRSr
SRRS
SRS
SRR
SR KwMRIMMRP
11 (3.34)
Ensuite en utilisant (3.34) et (3.33) on obtient l’expression :
S
RSPRSr
SRR
SR
SSR
SSRS
SRSR
SR
SSRS
SRS
SRSSSSS
KwMRMM
IMMRMMIPMMMIRU
11
111
(3.35)
Après transformation on peut écrire :
S
RSPRSr
SRR
SR
SSR
SSRS
SRR
SR
SSRSSS
KwMRMM
IMMRMMRUIP
11
11
(3.36)
Avec
1S S Ss SR R RSM M M M
(3.37)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
66
Finalement; nous obtenons l’équation suivante :
S
RSPRSr
SRR
SR
SSR
SSRS
SRR
SR
SSR
SSRSSS
KwMRMM
IMMRMMMRUIP
111
111
(3.38)
Les équations (3.34) et (3.38) représentent le modèle de la machine asynchrone en présence
de défaillances au stator. Le modèle global en considérant tous les coefficients des défauts
entre spires est présenté dans l’annexe n°3.
3.3 Interprétation des résultats de simulation des défauts statoriques (court-circuit entre
spires)
En ce qui concerne les défauts de court-circuit entre spires, nous avons considéré deux
cas de défaillances; à savoir : Ncci = 20 et Ncci = 40 spires en court-circuit par conséquent on
aura respectivement Ni = 140 et Ni = 120 spires qui seront utiles par phase. Les figures.3.7 et
3.8 représentent l’évolution des paramètres (courant, vitesse et couple) en considérant ces
défauts. Chaque défaut a été appliqué en marche à vide de la machine (à l’instant t = 0.8
secondes). On remarque que le courant après l’apparition du défaut, augmente
considérablement par rapport au courant du régime établi (le cas sain de la machine).
L’amplitude de l’augmentation est dépend de nombres de spires en court-circuit. Chose qui
peut être expliqué par la diminution simultané de la résistance et de la réactance de la phase
statorique. Nous remarquons aussi une légère perturbation de la vitesse et du couple, puis ces
derniers seront rétablis après un court laps de temps.

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
67
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
Cou
ple
Ce
(N.m
)
t(s)
Figures.3.7 Résultats de simulation lors de l’apparition d’un défaut de court-
circuit entre spires (12.5%)
t(s)
t(s)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
68
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
Cou
ple
Ce
(N.m
)
t(s)
t(s)
t(s)
Figure.3.8 Résultats de simulation lors de l’apparition le cas d’un défaut court-
circuit entre spires (25%)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
69
3.4. Défaut coupure d’une phase statorique [17, 25, 59]
Ce défaut peut être modélisé en éliminant une phase statorique. En effet, à l’instant t =
0.8 secondes nous avons mis phase a à zéro.
Sur la figure.3.9 sont illustrées les perturbations engendrées par le défaut de court-circuit
entre phases.
Figure.3.9 Résultats de simulation lors de l’apparition d’un court-
circuit entre phases
Vit
esse
W (
rd/s
)
C
oupl
e C
e (N
.m)
t(s)
t(s)
t(s)
Cou
rant
Ias
(A
)

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
70
4. Etude du comportement de la machine asynchrone en cas de défaut dans la partie
rotorique
La méthode adoptée pour la simulation des défauts rotoriques consiste à remplacer la
valeur initiale de la résistance des barres cassées par une valeur finie. Cette méthode est
appelée méthode des résistances finies. En effet, dans [35] on estime qu’une augmentation de
la résistance de la barre de 11 fois permet d’aboutir à des résultats en concordance avec ceux
obtenus expérimentalement.
Par conséquent nous avons considéré des augmentations de 11 fois supérieures à la valeur de
la résistance initiale de la barre.
Par ailleurs, il est à signaler que pour un pas de 310 s, une augmentation de plus de 11 fois
conduit à une instabilité numérique (dans notre modèle).
La méthode d’intégration est celle de Runge Kutta d’ordre 4 [20].
4.1. Modélisation des défauts dans le cas d’une cassure d’une barre ou de deux barres
Le modèle élaboré dans le deuxième chapitre (voir modèle ci-dessous) permet de simuler la
rupture de barres du rotor. En effet :
e
rcsr
rcsr
srsc
srsc
L
LM
LM
MNr
L
MNr
L
0000
002
30
0002
3
02
00
002
0
Ie
Iqr
Idr
Iqs
Ids
dt
d
0
0
0
Vqs
Vds
Re0000
04300
02100
002
02
0
AA
AA
WMNr
RsWL
WMNr
WLRs
srsc
srsc
Ie
Iqr
Idr
Iqs
Ids
(3.39)
Avec:
A1=
15cos
Re21cos
Re20cos
Re2
16
2 21514
201
2150 bbbbbb RR
NrRR
NrRR
Nr

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
71
- 0cos15cos2cos1cos1cos0cos16
41510 bbb RRR (3.40)
A2=
15sin15cos
Re21sin1cos
Re20sin0cos
Re2
16
2151401150 bbbbbb RR
NrRR
NrRR
Nr
+ 0cos15sin2cos1sin1cos0sin16
21510 bbb RRR
+ 0sin15cos2sin1cos1sin0cos16
21510 bbb RRR (3.41)
A3=
15sin15cos
Re21sin1cos
Re20sin0cos
Re2
16
2151401150 bbbbbb RR
NrRR
NrRR
Nr
+ 0cos15sin2cos1sin1cos0sin16
21510 bbb RRR
+ 0sin15cos2sin1cos1sin0cos16
21510 bbb RRR (3.42)
A4=
15cos
Re21cos
Re20cos
Re2
16
2 21514
201
2150 bbbbbb RR
NrRR
NrRR
Nr
- 0cos15cos2cos1cos1cos0cos16
41510 bbb RRR (3.43)
Par ailleurs, dans le cas où on veut simuler la rupture d’une barre ou de deux barres les seules
valeurs qui vont changer sont : A1, A2, A3 et A4 (voire annexe.2).
4.2 Simulation des défauts rotoriques en présence d’une charge sur l’arbre du moteur
La cassure des barres est l’un des défauts les plus fréquents du rotor. La simulation
numérique nous permettra d’identifier les signatures de ce défaut, à partir du modèle de
comportement du moteur.
Pour illustrer la cassure totale de barres dans le modèle de la machine, la valeur de la
résistance de la barre cassée sera considérée égale à onze (11) fois la valeur de la résistance
initiale [35].
Par ailleurs, les figures 3.10 jusqu’à 3.13 présentent les résultats obtenus par simulation du
modèle correspondant à (3.22) :

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
72
Figure.3.10 Evolution de la courbe des paramètres : au
démarrage, en charge et lors de la rupture d’une barre
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
Cou
ple
Ce
(N.m
)
t(s)
t(s) t(s)
Cou
rant
s I b
r(A
)
t(s)
Barre 1

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
73
Figure.3.11. Evolution de la courbe des paramètres : au démarrage, en
charge et lors de la rupture de deux barres
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
Cou
ple
Ce
(N.m
)
t(s)
t(s) t(s) C
oura
nts
I br (
A)
t(s)
Barre 2

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
74
Figure.3.12 Evolution de la courbe des paramètres : au démarrage, en
charge et lors de la rupture de trois barres
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
Cou
ple
Ce
(N.m
)
t(s)
t(s) t(s)
t(s)
Cou
rant
sI b
r (A
)
Barre 3

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
75
Figure.3.13 Evolution de la courbe des paramètres : au démarrage, en
charge et lors de la rupture de trois barres
Cou
rant
Ias
(A
)
V
ites
seW
(rd
/s)
Cou
ple
Ce
(N.m
)
t(s)
t(s) t(s) C
oura
nts
I br (
A)
t(s)
Barre 4

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
76
- Les figures.3.10, 3.11, 3.12, 3.13 montrent l’évolution de la vitesse, de courant
statorique et du couple électromagnétique lors des essais de cassure d’une barre, de
deux, de trois ou de quatre barres);
- Le démarrage s’effectue à vide;
- A partir de l’instant t=0.4 s le couple résistant nominal de 3.5 N.m est appliqué;
- La vitesse chute à 303.6 rad/sec, et le couple électromagnétique vient équilibrer le
couple résistant ;
- A t = 1s, le défaut de rupture de barres est provoqué, nous constatons :
- La détérioration de la barre réduit la valeur moyenne du couple électromagnétique et
fait apparaître des oscillations sur le couple et la vitesse de rotation.
- Les courants des phases statoriques sont toujours déphasés de 120°. Cependant une
ondulation de l’amplitude des courants apparaît avec la cassure de la barre ;
- Le rotor crée en plus du champ rotorique direct qui tourne à g*Ws par rapport au
rotor, un champ inverse qui lui tourne à –g*Ws dans le repère rotorique. L’interaction de
ces deux champs avec celui issu du bobinage statorique donne naissance à un couple
électromagnétique (somme d’une composante directe constante et d’une composante
inverse sinusoïdale), de pulsation 2g s . Elle sera à l’origine d’oscillations sur la vitesse
[12, 20].
- Il est à remarquer que l’augmentation du nombre de barres cassées provoque
l’augmentation de l’amplitude des oscillations de la vitesse (w) et du couple
électromagnétique (Ce), ce qui a pour effet la détérioration des enroulements de la
machine.
- L’amplitude des courants des phases statoriques est proportionnelle au nombre de barres
cassées.
- Dans le cas de défauts rotoriques, les courants dans les barres cassées chutent
pratiquement à zéro, tandis que les courants dans les barres voisines deviennent
déséquilibrés. Les courants qui traversaient les barres cassées se répartissent alors dans
les barres voisines [20, 41, 51].

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
77
4.3. Analyse spectrale de la signature du courant en présence des défauts rotoriques [12,
18, 20, 28, 51, 74, 75, 76, 77, 78]
Lors de la rupture de barres, il est difficile d'analyser directement le courant statorique. Ce
dernier ne présente, en effet, qu'une petite modulation.
L'analyse par FFT permet de mettre en évidence les raies présentes dans le spectre du signal.
Sur les figures 3.14 à 3.18 sont présentés les résultats de simulation relatifs à l'analyse par
FFT du courant ' Ias ' en régime permanent à charge nominale pour un glissement de 4%.
.
Figure.3.14 Spectre du courant statorique dans le cas d’un moteur
sain en marche à vide
Fréquence (Hz)
Am
litu
de (
dB)
Figure.3.15 Spectre du courant statorique dans le cas
d’un rotor avec une barre cassée
Fréquence (Hz)
Am
litu
de (
dB)
(1+2g) fs(1+2g) fs

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
78
Figure. 3.16 Spectre du courant statorique dans le cas d’un rotor
avec deux barres cassées
Fréquence (Hz)
Figure.3.17 Spectre du courant statorique dans le cas d’un rotor avec
trois barres cassées
Fréquence (Hz)
Figure.3.18 Spectre du courant statorique dans le cas d’un rotor avec
quatre barres cassées
Fréquence (Hz)
Am
litu
de (
dB)
Am
litu
de (
dB)
Am
litu
de (
dB)
(1-2g) fs
(1-4g) fs(1+2g) fs
(1+2g) fs
(1-2g) fs
(1-4g) fs
(1+2g) fs
(1+2g) fs
(1+2g) fs(1+2g) fs

Chapitre3 - Etude du comportement de la machine asynchrone en présence de défauts
79
Sur la figure.3.14 est présenté le spectre de fréquence du courant autour de 50Hz. A cet effet,
il est à remarquer que lors de la simulation du moteur sain, nous n'observons aucune raie
latérale.
Par contre, lorsqu'une barre est rompue, on remarque l'apparition des raies latérales à 46 Hz et
54 Hz au voisinage du fondamental fs = 50Hz, (voir figure.3.15).
Par ailleurs, avec l’augmentation du nombre de barres casées, on obtient des valeurs de plus
en plus importantes de l’amplitude des raies (voir figure 3.16, 3.17, 3.18).
On peut conclure que l’analyse spectrale du courant statorique fait apparaître les
composantes latérales par rapport à la fondamentale (à 46 Hz et 54 Hz -fréquences
correspondantes à la fréquence de Deleroi (1 2.g)fs [35, 36]).
Ce résultat très important constitue une signature fiable du défaut.
5. Conclusion du troisième chapitre
Dans ce chapitre la simulation de la machine asynchrone a été effectuée, d’une part,
en présence des défauts de la tension d’alimentation, affectant le stator (court-circuit entre
spires et coupure d’une phase) et, d’autre part, des défauts rotoriques (cassure de barres). A
cet effet, nous avons constaté que les paramètres de la machine (courant, vitesse et couple)
changent d’une façon considérable en présence des défauts. En effet, la cassure de barres, par
exemple fait apparaître des oscillations sur le courant, le couple et la vitesse. En plus,
l’analyse harmonique des courants statoriques permet de constater une corrélation entre le
défaut et les amplitudes des composantes à la fréquence )..21( gfs
D’autre part, il est à signaler qu’en vue de faciliter l’étude et de faire révéler les
défauts statoriques, nous avons procédé à la transformation du modèle multi-spires en un
modèle triphasé.
Les résultats obtenus (signatures des défauts) seront utilisés dans le cinquième chapitre
pour élaborer le module d’interprétation de l’information (système d’aide à la décision) des
défaillances de la machine asynchrone.
Par ailleurs, en vue de permettre la réalisation d’un système de diagnostic pour toutes
les machines à induction (à rotor en court-circuit et rotor bobiné), le quatrième chapitre est
consacré à l’étude expérimentale du comportement de la machine asynchrone à rotor bobiné
en présence des défaillances.

Chapitre4 Etude Expérimentale des défaillances
de la machine asynchrone

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
80
Chapitre4 - Etude Expérimentale des défaillances de la machine asynchrone
1. Introduction
Les défauts de fonctionnement de la machine asynchrone peuvent être modélisés
mathématiquement son modèle global pouvant être obtenu avec des hypothèses
simlificatrices. toutefois, quand cette machine est associée à un convertisseur élelctronique
avec sa commande, le modèle global est valide uniquement autour d’un point de
fonctionnement[1, 2].
L’étude expérimentale du comportement de l’association moteur-convertisseur nous
donnera les valeurs exactes des paramètres, chose qui permettra de fournir des valeurs
indicatrices exactes.
A cet effet, dans ce chapitre nous avons effectué l’étude expérimentale des défauts de la
machine asynchrone associé à un convertisseur électronique type SIMOVERT-SIEMENS. Ce
dernier est muni d’un système de contrôle qui permet de commander la machine avec
plusieurs types de commandes et d’effectuer son diagnostic en cas de présence de défauts ou
dans le cas où une mauvaise paramétrisation est introduite [79]. Ensuite, après étude de
l’architecture interne de ce convertisseur, nous avons proposé une architecture d’un système
de diagnostic des défauts de cette association munie d’un système d’interprétation en utilisant
les réseaux de neurones artificiels.

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
81
2. Description de l’architecture globale du système d’entraînement SIMOVERT-
Siemens
2.1 Schéma global du convertisseur et de ses interfaces
Le convertisseur SIMOVERT-Siemens permet de réaliser la commande vectorielle de la
machine asynchrone en effectuant le traitement des informations en temps réel à travers les
interfaces afin d’assurer le contrôle et le diagnostic de cet ensemble (voir figure.4.1). Ce
dernier est constitué d’un ensemble de modules et d’interfaces dont chacun a une tâche bien
définie.
Figure.4.1 Architecture globale du convertisseur SIMOVERT-Siemens et de ses interfaces
P01 2 3 4 5
6 7 8 9
Unité de stockage
24V
= =
Contrôle SIMATIC
Moteur
M
3
Unité de Commande
Redresser Réactance de ligne Filtre
Port série X300
PMU
Onduleur

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
82
1) le contacteur de ligne Q1
Tout l'installation est relié à la ligne par l'intermédiaire du contacteur de ligne, qui est
employé pour rompre l’alimentation s'il y a lieu ou en cas d'un défaut. La taille du contacteur
de ligne dépend de l'estimation de puissance du convertisseur ou du redresseur relié. Si le
contacteur de ligne est commandé à partir du convertisseur, le contacteur principal (checkback
P600) devrait être temporisé au moins à la 120 ms.
2) les fusibles / commutateurs ligne
Selon leurs caractéristiques de réponse et pour satisfaire aux exigences, les fusibles de ligne
protègent les câbles reliés et également le redresseur d'entrée de l'unité.
3) réactance de ligne
La réactance de commutation de la ligne limite les courants transitoires et réduit les
harmoniques. En plus, elle est nécessaire pour éliminer les perturbations du système dans les
limites établies par le système (VDE 0160) [79].
4) Les alimentations
Les alimentations externes de 24V sont employées pour maintenir la communication et le
diagnostic des unités reliées- vers le haut même lorsque la tension du secteur est branchée
vers le bas. Les critères suivants définissent les seuils considérés: un courant de 1 A doit être
fournie pour l'unité du redresseur et un courant de 2 A pour chaque inverseur relié.
Quand les alimentations de 24 V sont mises sous tension, un courant accru d'irruption sera
produit qui doit être maîtrisé par la source d'alimentation.
L’unité d'alimentation en énergie non commandée doit être employée : la tension doit être
située entre 20 V et 30 V.
5) "MARCHE/ARRÊT
Dans les cas d'une commande simple et d'une commande multiaxes sans l’unité du redresseur,
un commutateur est utilisé pour activer ou désactiver le contacteur de ligne. Quand elles sont
coupées, les commandes ne sont pas actionnées par un arrêt commandé, mais sont freinées
seulement par la charge. Dans le cas d'une commande multiaxes avec une unité de redresseur,
un bouton-poussoir est utilisé pour activer le contacteur de ligne. Le contacteur de ligne est
maintenu activé au moyen d'un contact de verrouillage, qui est relié au relais signalant le
défaut de l'unité de redresseur. Le contacteur reste aussi longtemps tant qu'aucun défaut n'est
détecté au niveau de l'unité du redresseur.

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
83
6) commutateur d’arrêt
le fonctionnement du commutateur d’arrêt provoque l’ouverture immédiate du contacteur de
ligne. Les commandes ne sont pas apportées à un arrêt commandé, mais sont freinées
seulement par la charge.
7) le relais signalant les défauts
Si un défaut se produit au niveau de l'unité du redresseur, un signal de défaut est produit par
l'intermédiaire des contacts de connexion du relais de signalisation. Quant les alimentations
de 24 V sont branchées, le relais reste fermé tant que les défauts sont absents. Dans le cas
d’apparition d’un défaut, la serrure du contacteur de ligne s’ouvre, le contacteur lâche et les
armatures de commande sont lâchées.
8) l'autobus interne USS
L'autobus USS est utilisé pour la communication interne entre les unités et il doit être branché
seulement si c’est nécessaire.
9) X101
Les entrées et les sorties numériques et l'entrée analogique et le rendement doivent être
assignés selon les conditions des commandes.
ATTENTION: la borne X101.1 ne peut être reliée à l’alimentation externe 24V.
10) l’interface X320 de l’unité du redresseur
L'interface X320 de l'unité du redresseur sert seulement à relier de manière permanente le
tableau de commande de l'opérateur OP1S au raccordement des inverseurs en ligne. Il y a
lieu de se référer aux consignes d'utilisation appropriées pour les mesures et les notes
applicables pour l'exploitation correcte.
11) l'interface série X103
L'interface série est employée pour relier le tableau de commande de l'opérateur (facile à
utiliser avec OP1S ou un PC). Il peut être actionné selon le RS232 ou le protocole RS485.
N.B. Se référer aux consignes d'utilisation appropriées pour les mesures et les notes
applicables pour une manœuvre correcte.

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
84
12) la charge préalable du module du condensateur
Quand un module de condensateur est utilisé, les bornes de chargement préalable des
condensateurs doivent être branchées.
13) le contacteur de sortie
L'utilisation d'un contacteur de rendement est utile si un moteur doit être électriquement isolé
dans un onduleur/redresseur avec le lien du courant continu.
14) filtre de ligne
L'utilisation d’un filtre de secteur est nécessaire si les tensions d'interférence par radio
produites par les convertisseurs ou les unités du redresseur doivent être réduites.
15) la canalisation d'alimentation du moteur
Les câbles de Siemens décrits dans le catalogue devraient être employés, pour relier le
convertisseur et le moteur.
16) l'Arrêt sûr (option)
L'option "d'arrêt sûr" permet d’interrompre l'alimentation d'énergie par la transmission des
impulsions dans la section de puissance par un relais de sûreté. Ceci garantie que l'unité n’a
pas un champ tournant lorsque le moteur est branché.
17) le contacteur auxiliaire
Le contacteur auxiliaire est employé pour interrompre séparément la machine. Le contacteur
principal est maintenu fermé en cas d'un signal de défaut. Il doit fonctionner si la tension de
commande pour le contacteur Q1 de ligne est de 230 V C.A.
3. Concept des zones du Convertisseur SIMOVERT-Siemens
La conception de zones est expliquée en utilisant l’exemple ci-dessous en utilisant un
diagramme qui simplifie la présentation du système d’entraînement.

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
85
1- La zone A est le bloc de connexion à la ligne d’alimentation contenant un filtre. Les
parasites émis doivent être éliminées avec des valeurs spécifiques limitées.
2- la zone B contient la ligne réactive (sert à la protection), le convertisseur de fréquence
ainsi que le contacteur d’arrêt de toute l’unité.
-La zone C c’est une zone de transfert qui sert à transformer, recevoir et transmettre les
données entre le système de contrôle et le bloc des capteurs.
4- La zone D forme une interface entre les câbles des signaux et les câbles de contrôle.
5- La zone E contient les trois phases d’alimentation et les trois phases du moteur.
Toutes les zones doivent être alimentées séparément pour assurer le découplage
électromagnétique.
Filtre
Convertisseur de
Fréquence
Unité de
freinContrôle : Simatic
Capteurs
Charge mécanique
Alimentation principale 1
4
2
3
Réactance de ligne
M 3
Machine
Zone B
Zone C
Zone A
Zone D
Zone E
Figure.4.2 Schéma synoptique simplifié du système d’entraînement

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
86
4. Commande vectorielle de la machine asynchrone :
4.1 Principe de la commande vectorielle
La commande de la vitesse de la machine asynchrone peut s’effectuer par:
la variation de la tension en maintenant la fréquence constante (par action sur l’angle
d’amorçage du gradateur alimentant le stator) [70];
la dissipation de l’énergie rotorique au moyen de résistances insérées dans le circuit
rotorique (on agit ainsi sur la fréquence de glissement);
le fonctionnement selon la loi (Va/fs) constante ou à flux constant (commande scalaire)
[65, 67], pour les charges constantes.
Toutefois, ces méthodes ne peuvent donner des performances dynamiques appréciables.
La difficulté réside dans le fait qu’il existe un couplage complexe entre les variables d’entrée,
les variables de sortie et les variables internes de la machine tels que : le flux, le couple, les
courants, la vitesse et la position [65, 67].
En 1971, Blaschke a proposé une nouvelle théorie de commande par flux orienté, qui
permet d’assimiler la machine asynchrone à une machine à courant continu à excitation
indépendante où il y a un découplage naturel entre la grandeur commandant le flux, à savoir:
le courant d’excitation et celle liée au couple (c’est à dire le courant d’induit).
Le convertisseur de fréquence SIMOVERT_MQSTERDRIVES fonctionne avec une source
de tension continue filtrée (voltage source DC link). Dans le but de garder les pertes les plus
faibles possibles, le filtre (DC_link) doit être branché.
Le convertisseur sert à entraîner le moteur électrique en boucle ouverte et en boucle fermée
avec différents modes de réglage ; à savoir:
- commande scalaire sans et avec capteur de vitesse;
- commande vectorielle sans et avec capteur de vitesse;
Filtre Redresseur OnduleurAlimentation
Principale
Convertisseur de FréquenceMoteur
M
3
Figure.4.3. Ensemble Convertisseur-Moteur et Commande

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
87
- commande directe du couple.
Le moteur utilisé est un moteur à rotor bobiné qui entraîne une charge linéaire (génératrice à
courant continu).
Dans cette étude (étude expérimentale des défauts de la machine asynchrone), nous
avons choisi la commande à flux rotorique orienté sans capteur de vitesse. A cet effet, lors de
l’introduction des paramètres de la machine asynchrone dans la phase de paramétrisation,
nous avons introduit le paramètre qui correspond à ce type de commande (fig.4.4).
Figure.4.4 Présentation des résultats expérimentaux : utilisation du logiciel MASTERDRIVE du Convertisseur SIMOVERET pour la commande de la machine asynchrone

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
88
Vit
esse
(pu)
Cou
ple
(pu)
Pui
ssan
ce (
pu)
Is R
MS
(pu)
Is(p
u)
Figure.4.5 Evolution des paramètres de la machine fonctionnant avec la commande vectorielle, en cas d’un fonctionnement normal
t(sec) t(sec)
t(sec) t(sec)
t(sec)

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
89
4.2. Evolution des paramètres de l’ensemble commande-convertisseur-moteur
Le logiciel Masterdrive de Simovert nous a permis de montrer le comportement de la
machine pour valider la commande appliquée (commande vectorielle par orientation du flux
rotorique sans capteur de vitesse) sur l’ensemble convertisseur-moteur (voire figure.4.4).
A cet effet, nous avons examiné un démarrage (de 0 à 1 pu), une initiation du flux puis la
réponse à une perturbation de charge de (N.m) exercée de 13 à 16 (sec). Nous remarquons
que l’application de l’échelon de charge engendre une influence sur la vitesse (voir
figure.4.5).. Cette dernière chute légèrement et elle se rétablit après un court laps de temps (un
temps qui est égal à celui du démarrage de la machine).
4. Etude expérimentale du comportement de la machine asynchrone en présence de
défauts :
Les défauts étudiés dans cette partie, sont les défauts de tension tels que : la coupure et le
déséquilibre des phases ainsi que les défauts rotoriques; à savoir: coupure d’une ou de deux
phases rotoriques. Les défauts considérés sont classés comme suit :
1- Coupure monophasée de la tension d’alimentation;
2- Coupure biphasée de la tension d’alimentation ;
3- Coupure d’une phase rotorique à vide;
4- Coupure d’une phase rotorique en charge;
5- Coupure de deux phases rotoriques à vide;
6- Coupure de phases rotoriques en charge.
En fait, toutes les caractéristiques de ces défauts (voir : figure.4.6 jusqu’à figure.4.11) ont été
prélevés de la manière suivante: chaque défaut a été appliqué après l’écoulement du régime
transitoire (après le démarrage) puis il sera éliminé après un temps suffisant pour son
apparition. La durée de chaque prélèvement est de 15 secondes. Par ailleurs, les courbes
caractéristiques de ces défauts peuvent être stockées sous formes numériques pour qu’on
puisse les utiliser en tant que signatures de références pour élaborer le système de diagnostic
de la machine asynchrone.

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
90
1 2 3 4 5 6
[%]
200
150
100
50
0
-50
-100
-150
-200
[ms]0 2455.20 4910.40 7365.60 9820.80 12276 14731.20 17186.40 19641.60 22096.80
1 Phase1Amps
2 Phase3Amps
3 Speedsmooth
4 OutputPow er
5 MotorTorque
6 OutputAmps
7 FixConn0%
8 FixConn0%
Figure.4.6. Défaut dans la partie statorique dans le cas d’une coupure monophasée de la tension à la sortie de l’onduleur
Is1
(pu
)
Is3
(pu)
Vit
esse
(pu
)
Cou
ple
(pu)
Vds
(pu
)
Vqs
(pu
)
t(sec) t(sec)
t(sec) t(sec)
t(sec) t(sec)

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
91
Figure.4.7. Défaut dans la partie statorique dans le cas d’une coupure biphasée de la tension à la sortie de l’onduleur
Is1
(pu)
V
ites
se (
pu)
Cou
ple
(pu
)
Is3
(pu)
Vds
(pu
)
Vqs
(pu
)
t(sec) t(sec)
t(sec) t(sec)
t(sec) t(sec)

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
92
Figure.4.8. Défaut dans la partie rotorique dans le cas de coupure d’une phase rotorique à vide
Is1
(pu
)
Is3
(pu
)
Vit
esse
(pu
)
Cou
ple
(pu)
Vds
(pu
)
Vqs
(pu
)
t(sec) t(sec)
t(sec) t(sec)
t(sec) t(sec)

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
93
Figure.4.9. Défaut dans la partie rotorique dans le cas de coupure d’une phase rotorique en charge
Is1
(pu)
Is3
(pu)
Vit
esse
(pu
)
Cou
ple
(pu)
Vds
(pu
)
Vqs
(pu
)
t(sec) t(sec)
t(sec) t(sec)
t(sec) t(sec)

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
94
Figure.4.10. Défaut dans la partie rotorique dans le cas de coupure de deux phases rotoriques à vide
Is1
(pu
)
Is3
(pu)
Vit
esse
(pu
)
Cou
ple
(pu
)
Vds
(pu
)
Vqs
(pu
)
t(sec) t(sec)
t(sec) t(sec)
t(sec) t(sec)

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
95
Figure.4.11. défaut dans la partie rotorique, coupure de deux phases rotoriques en charge
Is1
(pu)
Is3
(pu
)
Vit
esse
(pu
)
Cou
ple
(pu
)
Vds
(pu
)
Vqs
(pu
)
t(sec) t(sec)
t(sec) t(sec)
t(sec) t(sec)

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
96
6. Interprétation des résultats de simulation (régime normal et anormal):
A l'aide du logiciel MasterDrive de Simovert, on a pu étudier le comportement du
moteur asynchrone triphasé à rotor bobiné dans les régimes normaux et anormaux. A cet effet,
les courbes d’évolution des différents paramètres représentant les différents régimes sus cités
ont été obtenues.
Les résultats sont présentées sur les figures (voir : figure.4.6 jusqu’à figure.4.11). Ils
représentent les courbes d'évolution des différentes grandeurs: le courant statorique et sa
valeur efficace, la vitesse, la puissance développée et le couple.
Le caractère des graphes montre qu'en phase de démarrage le moteur subit un
allongement du régime transitoire. A titre d'exemple, considérons le couple
électromagnétique: l’évolution de ce dernier est caractérisé au début par une série
d'oscillations d'amplitude élevée s'amortissant au fur et à mesure que le moteur accélère. A
la fin du régime de démarrage, le couple atteint sa valeur maximale, en s'approchant de la
valeur de la charge (couple résistant), et la vitesse du moteur atteint sa valeur permanente
(régime établi).
Dans les régimes anormaux, les grandeurs électriques sont caractérisées par rapport au
régime normal par une variation brusque au moment d'apparition du défaut. Dans notre cas, le
défaut est créé lorsque le moteur est en régime établi.
Par ailleurs, il est à signaler que les défauts (coupure, déséquilibre) de la tension
d'alimentation influent également sur les comportements mécaniques du moteur, cette
influence est caractérisée par une chute de la valeur de la vitesse selon le type de défaut, ainsi
que la variation (oscillation) du couple électromagnétique.
En analysant les régimes à défauts pour les différentes grandeurs, nous remarquons que
l'évolution du courant statorique dans les différents cas de défauts est caractérisée par une
variation observable par rapport à l'état normal, autrement dit, cette grandeur reflète
l’existence d’un défaut (valeur indicatrice).
Dans le cas des défauts provoqués par la coupure d’une ou de deux phases rotoriques
le changement des paramètres n’est pas important (sauf dans le cas où la charge est appliquée
sur l’arbre du moteur). Cependant on observe une variation brusque du courant et une
diminution de la vitesse (voir : figure.4.9 et figure.4.11).

Chapitre 4 - Etude Expérimentale des défaillances de la machine asynchrone
97
7. Conclusion du quatrième chapitre
Dans ce chapitre, l’étude expérimentale des défauts de la machine asynchrone à rotor
bobiné a été effectuée. A l’aide du logiciel MasterDrive de Simovert nous avons pu obtenir
les courbes des différents paramètres de la machine durant le fonctionnement normal et en cas
de présence des défauts. Ces derniers seront utilisés en qualité de signaux de référence
permettant l’identification ultérieure des différents types des défauts. A cet effet, le
comportement de la machine asynchrone à rotor bobiné a été étudié en présence des défauts
suivants : - Coupure d’une phase statorique;
- Coupure de deux phases statoriques;
- Coupure d’une phase rotorique;
- Coupure de deux phases rotoriques.
Les résultats obtenus dans ce chapitre seront utilisés dans le chapitre n°5 en vue
d’élaborer un sous système du module de traitement et d’interprétation des informations du
système automatique de diagnostic en temps réel des défaillances des machines à induction.

Chapitre5Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines
asynchrones à rotor en court-circuit et de celles à rotor bobiné

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
98
Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines
asynchrones à rotor en court-circuit et de celles à rotor bobiné
1. Introduction
Automatiser la détection des défaillances des systèmes électromécaniques permet de
s’affranchir des faiblesses des opérateurs humains sujets, entre autres, à la fatigue, à l’oubli et
à la pression d’un environnement parfois hostile.
C’est typiquement un problème de reconnaissance des formes qui se divise en deux grandes
phases [80] :
Premièrement une phase de traitement de signal durant laquelle il faut prétraiter le signal
reçu, puis en extraire les informations nécessaires afin d’obtenir un signal directement
représentatif du comportement du système électromécanique pour tous les cas étudiés
(voir dans les chapitres précédents: les caractéristiques obtenues dans les cas des régimes
de fonctionnements normaux et anormaux : pour la machine asynchrone à rotor en court-
circuit (chapitres 2 et 3) et pour la machine asynchrone à rotor bobiné (chapitre 4)) ;
Deuxièmement, une phase de classification des données obtenues dans la phase
précédente en vue d’identifier le type et la cause de la défaillance (détection).
Pour ce faire, ce chapitre est consacré à l'élaboration du système automatique du
diagnostic des défaillances de la machine asynchrone; en construisant le bloc de RNA (la
partie principale du sous-système d'interprétation de l'information) et le système d’aide à la
décision (qui testera les sorties du bloc précédent). Le système d’interprétation de
l’information va délivrer un protocole de maintenance sur lequel on trouvera le type et les
causes du défaut, le lieu de son apparition (localisation) et les remèdes possibles pour
l'éliminer (ou l'isoler), etc.
2. Description de l’architecture du système automatique de diagnostic des défaillances
L'architecture du système automatique de diagnostic des défaillances, se compose de
deux sous systèmes (voir figure.5.1) :
- Un sous-système d'acquisition, de conversion et de traitement de l'information (SACI);

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
99
- Un sous-système d'interprétation de l'information [17, 80].
2.1. Sous-système d'acquisition, de conversion et de traitement de l'information (SACI-
MTI)
Le sous-système SACI comporte une chaîne de mesure des capteurs C 1 , C 2 ,
C 3 ,…C n des conditionneurs de signaux k1 , k 2 ,…k n , un multiplexeur, un filtre anti-
repliement (FAR), un convertisseur analogique (CAN) et un module de traitement de
l'information réalisé à base d'un logiciel d’analyse spectrale.
Le contrôle de l'état technique des machines asynchrones est effectué par les capteurs de
de grandeurs électriques (tension, courant, etc.) et mécaniques (vitesse).
Les signaux U1 (t),U 2 (t),..U n (t) des sorties des capteurs à travers les conditionneurs
parviennent à l'entrée du filtre anti-repliement à travers le multiplexeur temporel [17, 80].
IInntteerrffaaccee
SSoouuss--ssyyssttèèmmee dd’’iinntteerrpprrééttaattiioonn ddeessiinnffoorrmmaattiioonnss
SSoouuss--ssyyssttèèmmee dd''aaccqquuiissiittiioonn eett ddee ttrraaiitteemmeennttddeess iinnffoorrmmaattiioonnss
A N
Convertisseur
C1
C2
Cn
K1
K2
Kn
Multiplexeur
Filtre anti-repliement
Conditionneurscapteurs
Expert UtilisateurProtocole de maintenance
RNA Faits Nouveaux
Moteur d'Inférence
Dictionnaire Base des Règles
Base des Connaissances
MA
CH
INE
AS
YN
CH
RO
NE
Figure.5.1. Architecture du système automatique de diagnostic des défaillances

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
100
Le filtre FAR permet de limiter la bande passante des signaux avant l'échantillonnage
par le convertisseur Analogique-Numérique (CAN) à 8 bits pour éviter le repliement à partir
des signaux digitaux U1 (t), U 2 (t),..U n (t), du CAN .
L'analyse spectrale du signal est réalisée à l'aide du module de traitement d'information
(MTI) pour diminuer l'erreur de troncature causée par la limitation de la bande passante et la
non périodicité des signaux U1 (t), U 2 (t),..U n (t) [17, 81].
a. Les capteurs
Le contrôle de l'état technique des machines asynchrones est effectué par les capteurs et
pour cela, on mesure les grandeurs électriques (tension, courant, etc.) et les grandeurs
mécaniques (vitesse, couple, etc.). Ces grandeurs sont représentées sous la forme des signaux
d'informations (grandeurs indicatrices) [10, 54, 82].
b. la conversion et le multiplexage
L’agencement d'un système de mesure autour d'un ordinateur dépend largement des
interfaces dont celui-ci est doté au départ.
L'utilisation d'un ordinateur, machine logique par excellence, requiert toujours, une
conversion préalable de tous les signaux analogiques à traiter en signaux digitaux (conversion
A/N) [17, 81, 82]. Réciproquement, les résultats fournis sont souvent reconvertis en signaux
analogiques (conversion N/A), lorsqu'il s'agit par exemple de contrôler un processus. D'autre
part, l'ordinateur ne traitant en principe qu'un signal à la fois, il est nécessaire de lui accorder
successivement, selon une séquence définie et généralement en haute vitesse tous les canaux
de mesure. C'est la fonction multiplexeur du (MUX), de même tous les résultats obtenus
séquentiellement par l'ordinateur sur le même canal de sortie doivent être dirigés vers les
utilisateurs respectifs par un démultiplexeur (DEMUX).
Les performances générales des systèmes de mesure dépendent très largement des
caractéristiques des convertisseurs A/N et D/A ainsi que des multiplexeurs [82].
c. Le filtre anti-repliement
Aucun signal physique ne possède une limite en fréquence. On s'en approche autant que
possible en limitant l'amplitude des composants indésirables de fréquences supérieures à f/2
en plaçant, en amont du convertisseur analogique-numérique, un filtre passe bas, appelé dans
ce cas filtre anti-repliement, la fonction de transfert G (f) de ce filtre détermine la fréquence
d'échantillonnage minimum à utiliser pour une erreur admise donnée [82].

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
101
d. le convertisseur Analogique numérique
Avant d'être traité par un ordinateur, les grandeurs analogiques (en principe des
tensions) doivent être transformées en nombres, c'est le rôle principal du convertisseur (A/N)
[82].
2.2. Sous-système d'interprétation de l'information
Le sous-système d'interprétation de l'information est composé de :
- Un modèle de traitement qui sert à la détection du défaut qui est défini par le système
de réseau de neurones ;
- Un système d'aide à la décision.
2.2.1. Système d'aide à la décision
Les principaux éléments du système d'aide à la décision sont les suivants :
a. La base de connaissances (BC)
La base de connaissances, peut être imaginée comme étant pour le système expert,
ce que constitue la base de données pour le système de gestion des bases de données (SGBD).
Cependant, une grande différence peut être remarquée: alors qu'une base de données ne
contient que des données passives, la base de connaissances, quant à elle, contient à la fois
des données passives (les faits ) et des données actives (les règles). Ces dernières établissent
des relations parmi les faits et déterminent comment les manipuler. L'ensemble des faits et
des règles constituent la connaissance dont on dispose sur un sujet donné [80, 81].
En général, les faits sont sous formes de simples énoncés tels que "l'action est un actif"
alors que les règles sont de types :(Si "condition(s)" alors "conclusion(s)"). Les faits sont en
réalité des règles dégénérées, c'est à dire qu'ils ne sont soumis à aucune condition. L'ensemble
des conditions d'une règle s'appelle la prémisse d'une règle. Lorsque la prémisse d'une règle
est vérifiée, on dit que la règle est applicable ou encore activable [84].
b. La base de faits (BF)
La base de faits contient à tout moment, à travers le RNA, ce que le réseau a appris sur
le problème étudié.
c. Le moteur d'inférence
Le moteur d'inférence est un programme qui exploite la connaissance (pour ce faire, la
définition d'une stratégie de contrôle s’impose). Il scrute à travers la base de connaissance et
détermine comment les faits et règles doivent être gérés. Il comprend des mécanismes de

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
102
raisonnement et résout les problèmes en exploitant la base de connaissances en fonction de la
situation courante fournie par la base de faits [84].
d. L'interface
Outre ces composants de base, on retrouve différents éléments essentiels (interfaces)
dont le rôle est d'échanger les informations, d'une part, entre le sous-système d’acquisition des
données et le sous-système d’interprétation des informations et, d'autre part, entre le RNA et
l'utilisateur en vue de lire (afficher) les informations délivrées par le RNA et d'introduire des
données dans la base de connaissance.
2.3. Les fonctions du sous-système d'interprétation de l'information
Le système expert doit accomplir les fonctions essentielles suivantes :
- Le suivi du fonctionnement du mécanisme en temps réel ;
- L'identification des dysfonctionnements et des pannes ;
- L'établissement d'un diagnostic approfondi ;
- L'élaboration des rapports d'intervention.
3. Elaboration du module d’interprétation des informations
En réalité avant l'implémentation du bloc de RNA dans le sous-système d'interprétation
des informations, on est passé par l'étude de trois réseaux de neurones artificiels qui utilisent
différentes signatures de référence ; à savoir :
- Les valeurs échantillonnées des variables indicatrices ;
- Les valeurs efficaces des signaux sinusoïdaux des variables indicatrices.
Dans ce cas deux études ont été effectué: la première utilise les signaux de référence obtenus
par modélisation de la machine asynchrone à rotor en court-circuit. Tandis que, la deuxième,
utilise les signaux de référence de la machine asynchrone à rotor bobiné (obtenus
expérimentalement).
En effet, plusieurs études paramétriques ont été effectuées pour deux réseaux de
neurones différents, en vue de choisir le réseau celui qui est le plus adéquat et le plus
performant pour la mise en œuvre du système de diagnostic des défaillances ; il y avait au
total quatre études principales :
- choix des variables d'entrées ;
- Acquisition des données (base d’apprentissage) ;
- Construction du bloc RNA ;
- Apprentissage des RNA sélectionnés ;

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
103
- Test des réseaux sélectionnés sur de nouveaux exemples.
Les étapes sus citées sont confirmées par plusieurs auteurs [17, 30, 32, 80, 84, 85, 86, 87,
88].
3.1. Choix des variables d'entrées de RNA (les paramètres représentatifs des défauts)
Dans le premier RNA nous avons utilisé les valeurs échantillonnées des variables
mesurables (le courant statorique, la vitesse de rotation) parce qu’elles sont les plus
représentatives des défauts (leurs allures varient considérablement en cas de défaut) et, d'autre
part, leurs mesures sont accessibles par des capteurs qui fournissent leurs grandeurs
physiques.
Pour le deuxième et le troisième RNA, nous utilisons les valeurs efficaces des variables
(Ia, Ib, Ic, Va, Vb, Vc et w). A cet effet, après la phase de test et la comparaison entre les
deux réseaux, on peut choisir parmi eux celui qui est le plus convenable et le plus performant
pour accomplir la tâche de diagnostic [80, 89].
3.2 Acquisition des données (base d’apprentissage)
Avant la construction du système du bloc RNA pour la détection des défaillances des
systèmes électromécaniques (cas des machines à induction) pour l’identification des signaux
acquis à partir du SACI). On doit tout d'abord accéder à la phase d'acquisition des données
(base d'apprentissage) à partir de laquelle le RNA pourra apprendre. Celle-ci peut toujours se
mettre sous forme de fichier ou de tableau (matrice). Ce dernier est constitué de classes de
signatures (vecteurs), dont chacune représente un type de fonctionnement. En outre, chaque
signature (vecteur) est représentée par des valeurs échantillonnées dans le premier RNA [17,
80], et des valeurs efficaces dans le deuxième [80, 89, 90, 91].
Pour construire un modèle non paramétrique (RNA) décrivant le comportement du
système électromécanique (fonctionnements normaux et anormaux) on doit construire une
base de données aussi riche que possible, qui contient beaucoup d'informations sur les défauts
et les régimes de fonctionnement et sous différentes formes (l'information sur un défaut doit
être extraite d'une façon redondante) [18, 13, 64, 90]. Pour réaliser cette dernière on a procédé
comme suit :
- chacun des défauts a été simulé en régime normal (à vide) ;

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
104
- En régime en charge avec différentes perturbations (25%, 50%, 75%, et 100% de la charge
nominale) pour les deux défauts coupure et déséquilibre de tension d'alimentation [13, 18,
28];
- Dans la deuxième base des données nous avons considéré les valeurs efficaces à l'instant
(2.5 sec) (en cas de défaut) ;
- Le prétraitement effectué sur le signal acquis, permet de donner la suite des valeurs fournies
par l'échantillonnage de ce signal. Ces valeurs représentent un défaut ou un type de
fonctionnement, elles peuvent aussi être appelées modalités ou vecteurs [16, 17]. En outre, la
base de données de chacune des variables considérées est constituée de modalités et chaque
modalité est présentée par un échantillon d'apprentissage X={x1,x2,…………,xp}ou un
ensemble d'observations [17, 83, 90, 91, 93].
En général l'échantillonnage de l'une des observations est effectué à pas constant, et
celles-ci sont ordonnées dans le temps. Donc l'échantillon d'apprentissage qu'on a considéré
devient X={ t 0 , t 0 + ,……. t 0 +(p-1) }ou t 0 et représentent respectivement le premier
instant d'échantillonnage et le pas d'échantillonnage. Ce dernier dans notre cas est égal à
0.002s. Par ailleurs, on doit extraire pour chaque type de défaut 20 valeurs échantillonnées à
partir de l'instant à laquelle le défaut à été appliqué, ou (p) est égal à 0.02/ .
3.3. Construction de la base d'apprentissage
La base d'apprentissage du 1er RNA est mise sous forme de fichier ou de tableau
(matrice). Ce dernier est représenté par des classes de vecteurs, ou chaque classe représente
un type de fonctionnement, et chaque vecteur est représenté par les valeurs échantillonnées.
Dans notre cas il y a plusieurs vecteurs qui représentent 10 types de fonctionnements et ces
derniers représentent 5 vecteurs pour les différentes perturbations (0%, 25%, 50%, 75% et
100% de la charge nominale) [64, 92]. Les deux vecteurs sont représentés par 20 valeurs
échantillonnées (10 pour le courant statorique et 10 pour la vitesse de rotation), en prenant ces
valeurs dans un intervalle de temps égal a 0.02s (c'est-à-dire une période) [17].
Pour le deuxième RNA, les mêmes étapes, que pour le premier RNA, ont été
considérées, mais avec des valeurs efficaces. Dans ce cas chaque vecteur est constitué des 7
paramètres cités ci-dessus (Ia, Ib, Ic, Va, Vb, Vc et w). Ces derniers représentent la couche
d'entrée du deuxième RNA. En fait, pour passer à l'étape de classification nous disposons
pour chacun des paramètres de 11 types de fonctionnement y compris le fonctionnement
normal (voir le tableau 5.1) [80].

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
105
Tableau 5.1 Classification des types des défauts de la machine asynchrone à rotor en court-circuit
CODECATEGORIE
TYPE DE DEFAUT
SYMBOLE
S4 S3 S2 S1
1 Etat sain ES 0 0 0 0
2 Coupure monophasée CM 0 0 0 1
3 Coupure biphasée CB 0 0 1 0
4 Coupure triphasée CT 0 0 1 1
5 Déséquilibre monophasé DM 0 1 0 0
6 Déséquilibre biphasé DB 0 1 0 1
7 Déséquilibre triphasé DT 0 1 1 0
8 Coupure d’une phase statorique CPH 0 1 1 1
9 Court-circuit entre spires 20 CCSP1 1 0 0 0
10 Court-circuit entre spires 40 CCSP2 1 0 0 1
Ensuite, le troisième RNA utilise les mêmes entrées que le deuxième RNA ; les valeurs
efficaces des paramètres mesurés (Ia, Ib, Ic, Va, Vb, Vc et w) de la machine asynchrone à
rotor bobiné. Pour passer à l'étape de classification nous disposons pour chacun des
paramètres de 5 types de fonctionnements y compris le fonctionnement normal (voir le
tableau 5.2) [80].
Tableau 5.2 Classification des types des défauts de la machine asynchrone à rotor bobiné
CODECATEGORIE
TYPE DE DEFAUT
SYMBOLE
S3 S2 S1
1 Sans Défaut NF 0 0 0
2 Coupure d’une phase statorique CMS 0 0 1
3 Coupure de deux phases statoriques CBS 0 1 0
4 Coupure d’une phase rotorique CMR 0 1 1
5 Coupure de deux phases rotoriques CBR 1 0 0

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
106
3.4 Construction du bloc de RNA
Les réseaux de neurones que nous avons testés sont tous des réseaux multicouches qui
utilisent l'algorithme de rétropropagation pour leurs apprentissages.
Pour l'implémentation du bloc RNA dans le système automatique de diagnostic, on
propose d'étudier deux réseaux, chose qui permettra après la phase de test et de comparaison
entre les deux réseaux, de pouvoir choisir parmi eux celui qui est le plus convenable et le plus
performant pour accomplir la tâche de diagnostic.
Les étapes de construction et de validation des réseaux de neurones sont réparties en
trois phases:
a. Choix des entrées des réseaux :
Pour le premier réseau: Les variables sélectionnées (le courant statorique (Ids) et la
vitesse (w)) vont permettre d'identifier les entrées de ce réseau; ce dernier possède 20 entrées
sur la couche d'entrée qui sont les valeurs échantillonnées du courant statorique et de la
vitesse (voir la figure.5.2).
Pour le deuxième réseau: ses entrées sont les valeurs efficaces (Ia, Ib, Ic, Va, Vb, Vc et w ),
ce qui signifie que le nombre d'entrées de ce réseau est égal à 7 (voir la figure 5.3 ) .
Figure.5.2. Structure du premier réseau à étudier (les valeurs indicatrices sont les
valeurs échantillonnées). Cas de la machine asynchrone à rotor en court-circuit
Valeurs échantillonnées du courent statorique
I1 …
…I
p
Valeurs échantillonnées
dela vitesse
w1 …
…w
p
Génération des valeurs échantillonnées des valeurs indicatrices m
esurées
Vers le Système d’aide à la
décisionM
AC
HIN
ES
AS
YN
CH
RO
NE
S
RNA1
Système d’acquisition
et de traitement de l’information
S4 S3 S2 S1
I1 I
2 I10
w1 w
2 w10

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
107
Par ailleurs, une normalisation sera effectuée pour ramener toutes les valeurs des entrées
dans l’intervalle [0,1] ; cette opération est effectuée pour adapter les valeurs échantillonnées
ou les valeurs efficaces aux neurones d’entrée. En effet, chaque valeur échantillonnée ou
chaque valeur efficace est reliée à un neurone d’entrée du réseau qui n’accepte que des
valeurs comprises entre zéro et un [4, 28, 30, 31, 64, 92].
Figure.5.3. Structure du deuxième réseau à étudier (les valeurs indicatrices sont
les valeurs efficaces). Cas de la machine asynchrone à rotor en court-circuit
Vers leSystème d’aide à la
décision
MA
CH
INE
S A
SY
NC
HR
ON
ES
RNA2
Système d’acquisition et de traitement de l’information
S4 S3 S2 S1
Calcul de la valeur efficace des courants et
des tensions
Les entrées du R
NA
2:
(Ia , Ib , Ic , Ua , U
b , Uc w
)
Ia , Ib , Ic , Ua , U
b , Uc w
Sourced’énergie
Vers le Système d’aide à la décision
Système de
traitement de l’information
S3 S2 S1
Calcul de la valeur efficace des
courants et des tensions
Les entrées du R
NA
:(Ia , Ib , Ic , U
a , Ub , U
c w)
Ia , Ib , Ic , Ua , U
b , Uc w
Sorties du RNA
Figure.5.4 Architecture de système automatique de diagnostic des défauts. Cas de la
machine asynchrone à rotor bobiné

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
108
b. Choix des sorties des réseaux
Nous avons décidé d'associer chaque défaut à un code, c'est-à-dire chaque défaut est
représenté par les quatre neurones de sortie. Chaque défaut est représenté sous différentes
formes (vecteurs). Ces vecteurs représentent une classe ; d'une façon plus claire nous avons
associé à chaque classe un code (voir figure.5.5).
Lors de la détection d'un défaut, le réseau doit indiquer un nombre binaire quelconque
(par exemple 0110) à sa sortie, qui correspond à ce type de défaut (défaut de coupure
monophasée). C'est-à-dire chaque sortie du réseau présente un seul chiffre soit 1 ou 0.
Les défauts sont représentés sur les tableaux 1 et 2 ; avec leurs symboles et leurs codes
associés.
Le nombre de sorties pour les deux premiers réseaux est égal à 4 (cas de la machine
asynchrone à rotor en court-circuit). Tandis que le troisième réseau possède trois sorties, car
les défauts considérés dans ce cas ne sont pas nombreux (cas d’une machine asynchrone à
rotor bobiné).
c. Choix de l'architecture générale des deux réseaux étudiés
Pour le choix de l'architecture générale des réseaux de neurones étudiés; on considère un
pas d'échantillonnage égal à 0.002 lors de la phase de l'acquisition des données pour le
premier réseau, et on prend les mêmes valeurs efficaces mais normalisées pour le deuxième et
le troisième réseau.
Figure.5.5 Principe de classification des signaux des défaillances
0 0 0 0
0 0 0 1
1 1 1 1
Défaut 1
Défaut 2
Défaut n

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
109
4. Apprentissage des réseaux de neurones sélectionnés
Les réseaux utilisés sont des réseaux multi couches, comportant une couche d’entrée
qui correspond à la rétine, une couche de sortie qui correspond à la décision, et un certain
nombre de couches dites cachées. Ces couches cachées constituent les variables de
représentation interne des problèmes [4, 30, 31, 14, 64].
Les réseaux sélectionnés sont entraînés par l’algorithme de rétro propagation. La
rétropropagation est le paradigme des RNA le plus utilisé. Le terme désigne un algorithme
permettant d’ajuster les poids de connections en un RNA multi couches, ce paradigme a été
appliqué avec succès dans différents domaines tels que : militaire, médical, synthèse de la
parole, traitement de signal, etc. [4, 30, 31, 95, 96, 97, 98, 99, 100, 101, 102, 103, 104, 105].
La rétropropagation est basée sur des principes mathématiques (voir annexe 5). Cette
méthode a donnés de bons résultats dans de nombreuses d’applications. Pour l’appliquer il
suffit d’avoir des données d’entrée et des données de sortie.
5. Tests des RNA sur les nouveaux exemples
On peut décrire cette étape pour les trois réseaux de la manière suivante : on a effectué
un apprentissage automatique à l'aide du logiciel MATLAB jusqu'à l’obtention de l’erreur
quadratique la plus petite. Pour le premier réseau on a obtenu l’erreur quadratique moyenne la
plus petite après 86 itérations, pour le deuxième après 64 itérations, et le troisième après 56
itérations. A la fin de cette étape on fixe le nombre des neurones de chaque couche pour les
trois réseaux (voir tableau 5.3).
Tableau.5.3 Différents essais d'apprentissage des RNA
NOMBRES
DE
NEURONES
COUCHE
D'ENTREE
COUCHES
CACHEES
COUCHE DE
SORTIE
ERREUR
QUADRATIQUE
MOYENNE
RNA n° 1 20 4-8 4 2.6375 e-017
RNA n° 2 7 8-5 4 2.39973 e-015
RNA n° 3 7 6-7 3 3.24221 e-015
Une fois que les deux réseaux de neurones sont construits et que leur apprentissage a
atteint des performances satisfaisantes, on passe à l'étape de comparaison entre des exemples

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
110
à l'entrée du réseau. En fait, ces exemples appartiennent à deux bases de données, la première
étant la base d'apprentissage et la deuxième étant la base de tests sur laquelle on procède aux
tests de la capacité du réseau à reconnaître des exemples normaux (non appris).
Cette dernière opération permet d'estimer la capacité de généralisation du réseau.
Il est évident que les tests des deux réseaux de neurones sur les exemples appris ou qui
appartenaient à la base d'apprentissage du réseau ont donné de meilleurs résultats, car tous les
types de fonctionnement (les anomalies et le fonctionnement normal) ont été identifiés
exactement par les deux réseaux ; cela peut être expliqué par les résultats obtenus dans la
phase d'apprentissage des deux réseaux (dont les valeurs des erreurs quadratiques moyennes
sont proches de zéro).
En ce qui concerne le test des deux réseaux sur les exemples qui n'ont pas été appris
dans la phase d'apprentissage (nouveaux exemples), leurs résultats sont présentés dans les
tableaux ci-dessous.
Tableau.5.4 Résultats de test du premier RNA (Déséquilibre biphasé pour différentes charges). Cas d’une machine asynchrone à rotor en court-circuit
CHARGE NOMINALE EN %SORTIEDU
RNA90% 80% 60% 40% 20% 10%
S1 3.0304e-11 1.2017e-11 1.0624e-11 2.8525e-9 4.5219e-12 3.4735e-9
S2 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000
S3 4.5699e-9 1.7221e-11 1.7974e-11 6.6221e-9 2.1536e-7 2.4453e-8
S4 1.8067e-10 2.1553e-12 1.4524e-12 1.8798e-12 1.8067e-10 9.9938e-11
Tableau.5.5 Résultats de test du deuxième RNA (Déséquilibre biphasé pour différentes charges). Cas d’une machine asynchrone à rotor en court-circuit
A partir des résultats obtenus dans la phase du test, on constate que les sorties des deux
réseaux évoluent conformément aux sorties désirées préétablies auparavant.
D'un autre côté, on peut présenter les sorties du RNA n°2 d'une autre manière :
CHARGE NOMINALE EN %SORTIEDU
RNA90% 80% 60% 40% 20% 10%
S1 4.7282e-8 4.6832e-8 4.7150e-8 4.8756e-8 1.2570e-8 2.8630e-8
S2 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000
S3 4.5456e-8 4.6577e-8 4.2623e-8 3.8775e-8 4.8509e-8 4.9080e-8
S4 2.5088e-9 2.4980e-9 2.5072e-9 2.5671e-9 2.2968e-9 2.2487e-9

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
111
On présente les sorties du RNA graphiquement en temps réel (voir dans l'annexe.4 le schéma
des neurones artificiels réalisé par le logiciel MATLAB (SIMULINK).
Les résultats des sorties du deuxième RNA n°2 sont présentés sur les Figure.5.6 et
Figure.5.7.
5.1 Interprétation des résultats
A partir de la présentation en ligne des sorties de RNA n°2, on constate un changement
sur les graphes à l'instant de l'application du défaut. Dans notre cas, le défaut est introduit à
l'instant t=1s.
A cet instant, par exemple, les sorties: S4, S3, S2, S1, indiquent respectivement les
valeurs: 0, 0, 1, 0, donc le défaut correspondant est: déséquilibre monophasé.
Les autres défauts appliqués, ont donnés les mêmes valeurs que les valeurs désirées
(codes des défauts: déséquilibres biphasé de la tension et coupure triphasée).
Les exemples testés représentent l'un des défauts sélectionnés auparavant, mais cette
fois-ci ce dernier est simulé pour d'autres régimes de fonctionnement (c'est-à-dire d'autres
niveaux de perturbation qui sont différents de ceux qui ont été considérés dans la base
d'apprentissage).
Sur les tableaux 5.3 et 5.4 sont présentés les sorties des deux réseaux (de la machine
asynchrone à rotor en court-circuit) pour différents régimes de fonctionnement; d'après les
résultats, on constate que les sorties des deux réseaux suivent parfaitement les sorties désirées
préalablement et qui sont présentées dans le tableau 5.1.
A partir de la présentation en ligne des sorties du troisième RNA, on constate que les
graphes changent leurs caractéristiques à l'instant de l'application du défaut. Dans notre cas le
défaut est crée à l'instant t=13s. A cet instant, par exemple, les sorties : S3, S2, S1, indiquent
respectivement les valeurs : 0, 0, 1, donc le défaut correspondant est : coupure d’une phase
statorique (Voir figure.5.8).
L’autre défaut appliqué, a donné les mêmes valeurs que les valeurs désirées où le code
du défaut (la coupure de deux phases rotoriques est S3, S2, S1) correspond à 1, 0, 0 (voir
Figure.5.9).

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
112
0 0.5 1 1.5 2 2.5 30
0.5
1
0 0.5 1 1.5 2 2.5 30
0.5
1
0 0.5 1 1.5 2 2.5 30
0.5
1
0 0.5 1 1.5 2 2.5 30
0.5
1x 10
-7
S2
S
3
S4
t(s)
t(s)
t(s)
t(s)
S1
Figure.5.6 Test des sorties du deuxième RNA dans le cas d’une coupure biphasée de tension
t(s)
ias(
A)

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
113
0 0.5 1 1.5 2 2.5 30
0.5
1
0 0.5 1 1.5 2 2.5 30
0.5
1
0 0.5 1 1.5 2 2.5 30
0.5
1
0 0.5 1 1.5 2 2.5 30
1
2x 10
-8
S1
S
2
S3
S
4
t(s)
Figure.5.7 Test des sorties du RNA dans le cas d’une déséquilibre biphasé de tension
t(s)
ids(
A)
t(s)
t(s)
t(s)

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
114
Is1(
pu)
Is3
(pu)
Figure.5.9 Test des performances du RNA coupure de deux phases rotorique en charge d’une MASRB
S1
Figure.5.8 Test des performances du RNA coupure d’une phase statorique à vide d’une MASRB
Is1
(pu)
Is3
(pu)
vsd
(pu
)
v
sq (
pu)
vsd(
pu)
vsq
(pu)
S1
S2
S2
S3
S3

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
115
6. Localisation des défaillances
Lorsque le système de détection (RNA) détecte un défaut, vient l'étape de la localisation
de l’endroit d’apparition de ce défaut. Par la suite il faut donner, si possible, les remèdes pour
l'éliminer (le système d'aide à la décision qui interprète les codes donnés par la sortie du
réseau de neurones).
Avant que les codes sus cités ne soient interprétés, on doit tout d'abord arrondir les sorties du
RNA aux valeurs zéro et un pour faciliter la tâche d'interprétation pour le système d'aide à la
décision. Par conséquent, la méthodologie retenue dans cette phase est la suivante: lorsque le
système de diagnostic reçoit à son entrée un exemple (valeurs échantillonnées des deux
variables), le réseau de neurones classifie cet exemple, en donnant sa sortie correspondante,
puis cette dernière est interprétée comme une donnée représentant un fonctionnement normal,
si toutes les sorties du réseau sont plus petites que 0.5 (c'est-à-dire plus proches de zéro ) ; et
un défaut est assimilé à 1 si l'une des sortie est plus grande que 0.5. Cette phase est appelée
déduction des codes [17, 18, 64, 80, 91, 100]. Les étapes de déduction et de localisation sont
illustrées par les organigrammes suivants :
6.1. Détection d’une défaillance d’une machine à induction et détermination de son code
Début
Lecture des signaux
en provenance du SACI-MTI
Lecture des poids synaptiques et
baies du RNA
Calcul des sorties du RNA
Déduction des codes
Affectation des codes vers le SDA
A
Figure.5.10. Détection d’une défaillance d’une machine à induction et détermination de son code

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
116
6.2. Localisation de l’endroit d’apparition des défaillances par le systéme d'aide à la décision Une fois, que le système d'aide à la décision a pu interpréter le code délivré par le bloc
RNA, le type de défaut, son endroit d'apparition, ses causes possibles, et les remèdes
correspondant, doivent être générés (afficher sur un écran) pour que l'opérateur puisse
intervenir le plus rapidement que possible, afin d’éliminer le défaut, en utilisant les remèdes
proposés par ce système. En effet, nous présentons dans la figure ci-dessous un exemple de
sortie d'un système d'aide à la décision qui affiche sur l'écran toutes les informations (type,
lieu, cause, etc.). Dans ce cas, les résultats d’un type de défaut qui vient d'être détecté par le
réseau de neurones sont subit à une analyse par le système d'aide à la décision, consignés dans
un protocole de maintenance (fig. 5.11).
7. Synthèse de l’architecture de système automatique de diagnostic des défauts des
machines asynchrones à rotor bobiné et à rotor en court-circuit en vue d’élaborer
une installation expérimentale
D’après l’étude effectuée du système de diagnostic des défaillances des machines à
inductions il a été constaté que:
- les modules d’interprétation des informations étudiés ont montré de bonnes
A
Interprétation des codes desdéfaillances
Affichage de type de défaillance
Affichage du lieu et des causesPossible de défaillance
Affichage du protocole deMaintenance (remèdes possibles)
Figure.5.11 Localisation de l’endroit d’apparition des défaillances d’une machine à induction par le systéme d'aide à la décision

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
117
performances lors de la phase de test;
- Les réseaux sélectionnés ont montré une capacité appréciable de généralisation;
- L’élaboration préalable des différents blocs du système permet la réalisation pratique
du système automatique de diagnostic en temps réel des défaillances des machines à induction
(à rotor en court-circuit et à rotor bobiné).
En effet, une architecture d’un système de diagnostic automatique a été proposée, pour la
détection en temps réel des défaillances des machines à induction. L’architecture interne du
système automatique de diagnostic des défaillances, se compose de deux sous-systèmes [59,
81, 100]. Le premier effectue la procédure d’acquisition et de traitement de l’information
(segmentation, paramétrisation et représentation), tandis que le deuxième sous-système (bloc
RNA lié à un système d’aide à la décision) a pour rôle de détecter les défaillances, qui
peuvent surgir sur le système électromécanique et de délivrer un protocole de maintenance,
comportant : un prédiagnostic, un diagnostic et un listing des travaux à réaliser. Par ailleurs,
les informations qui proviennent des capteurs seront transmis au système d’aide à la décision
à travers le contrôleur de l’unité de commande du convertisseur [79] en vue de détecter les
défauts des machines asynchrones par les réseaux de neurones artificiels : le module RNA
(voir figure.5.12).
Par ailleurs, cette architecture sera utilisée, pour la détection et la localisation des
défaillances (à base des résultats expérimentaux, chapitre 4 et des résultats obtenus par
simulation, chapitre 3) des machines asynchrones à rotor bobiné et à rotor en court-circuit.
Dans cette partie une nouvelle stratégie est proposée pour l’élaboration du module de
détection et de traitement de l’information et ainsi que l’acquisition des données à partir du
contrôleur Simatic du convertisseur SIMOVERT.

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
118
8. Exemple d’un protocole de maintenance affiché par le système d'aide à la décision
Les résultats de travail du diagnostic automatique de diagnostic en temps réel des
défaillances, sont présentés à l’utilisateur sous la forme d’un protocole de maintenance. Par
exemple :
Filtre
Convertisseur de
Fréquence
Unité de
freinContrôle : Simatic
Capteurs
Charge mécanique
Alimentation principale
Réactance de ligne
M 3
Machine à induction
Figure.5.12 Synthèse de l’architecture de système automatique de diagnostic des défauts d’unemachine à induction
IInntteerrffaaccee
Expert UtilisateurProtocole de maintenance
RNA Faits Nouveaux
Moteur d'Inférence
DictionnaireBase des Règles
Base des Connaissances
Modules de traitement et d’interprétation de l’information
Figure.5.13 Présentation du type de défaut qui vient d'être détecté

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
119
Figure.5.14 Affichage des causes possibles qui ont provoqué l’apparition du défaut
Figure.5.15 Affichage des remèdes qu'il faut appliquer (entreprendre) pour éliminer le défaut

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
120
9. Conclusion du cinquième chapitre
Le diagnostic précoce d’une défaillance, s’opère en deux étapes: dans la première
phase, on réalise la détection d’une situation d’anomalie, puis l’on identifie la cause de la
défaillance et on localise son endroit d’apparition.
Dans ce chapitre, après la présentation du système automatique de diagnostic, en vue
d’élaborer le module d’interprétation des informations, nous avons étudié trois réseaux de
neurones qui possèdent des sorties et des entrées différentes (des valeurs indicatrices
différentes (tensions, courants et vitesse) et deux types de signatures (valeurs échantillonnées
et valeurs efficaces) respectivement pour les machines asynchrones à rotor en court-circuit et
celle à rotor bobiné. Les entrées du premier réseau sont les valeurs échantillonnées du courant
statorique et de la vitesse de rotation. Pour les deux cas le nombre d’entrées des trois réseaux
a été choisi selon deux critères: le premier c’est le pas d’échantillonnage (qui ne doit pas être
très petit car ceci implique que le nombre d’entrées du réseau sera plus grand, chose qui
augmente par conséquent le temps de calcul du RNA) et le second, est relatif à la conformité
au théorème de Shannon (le pas d’échantillonnage doit être choisi en se basant sur le
théorème de Shannon pour que les signaux échantillonnés ne perdent pas leurs
caractéristiques).
Le deuxième et le troisième réseau utilisent des entrées facilement accessibles telles
que les valeurs efficaces des trois courants statoriques et celles de la tension d’alimentation
ainsi que la valeur instantanée de la vitesse.
Par ailleurs, pour la mise en œuvre du sous-système d’interprétation de l’information,
plusieurs études paramétriques ont été effectuées (choix du type de réseau, choix des entrées,
choix des sorties, etc.). Ces études ont été précédées par l’opération d’acquisition des données
(par simulation pour la machine asynchrone à rotor en court-circuit et expérimentalement
pour la machine asynchrone à rotor bobiné), chose qui a pour but d’établir la base
d’apprentissage de chaque réseau afin de définir pendant la phase d’apprentissage le nombre
de couches cachées et le nombre de neurones par couche cachée (dimensionnement de
l’architecture finale des réseaux).
Enfin, les résultats obtenus dans la phase de test des deux réseaux nous ont permis de
sélectionner le deuxième réseau pour le mettre en œuvre dans le système automatique du
diagnostic des machines à induction. Le choix de ce dernier est justifié par sa simplicité, car
les entrées des réseaux de neurones proviennent directement des capteurs des courants, de
tensions et de la vitesse de rotation (c’est à dire, les valeurs efficaces des courants et des
tensions et de la valeur directement mesurée de la vitesse de rotation).

Chapitre 5 - Développement du système automatique de diagnostic des défaillances et son application dans les cas des machines asynchrones à rotor en court-circuit et de celles à rotor bobiné
121
Par la suite, nous avons proposé le schéma de synthèse de l’installation expérimentale du
système automatique de diagnostic en temps réel des défaillances des machines à induction (à
rotor en court-circuit et celle à rotor bobiné). L’architecture interne du système automatique
de diagnostic des défaillances, se compose de deux sous-systèmes. Le premier effectue la
procédure d’acquisition et de traitement de l’information (segmentation, paramétrisation et
représentation), tandis que le deuxième sous-système (bloc RNA lié à un système d’aide à la
décision) a pour rôle de détecter les défaillances, qui peuvent surgir sur le système
électromécanique et de délivrer un protocole de maintenance, comportant : un prédiagnostic,
un diagnostic et un listing des travaux à réaliser. Par ailleurs, les informations qui proviennent
des capteurs seront transmis au système d’aide à la décision à travers le contrôleur de l’unité
de commande Simatic du convertisseur SIMOVERT en vue de détecter les défauts des
machines asynchrones par les réseaux de neurones artificiels.

Conclusion générale et Perspectives

Conclusion générale
122
Conclusion Générale et Perspective
L'objectif principal de ce travail est le développement d’un système automatique de diagnostic des
machines à induction, qui a pour rôle principal de détecter et de localiser les défaillances qui peuvent
surgir sur les machines asynchrones en plein fonctionnement, c'est-à-dire le diagnostic en ligne (on-line).
Le second rôle est de générer une fiche technique correspondante à chaque type de défaut (après sa
détection). C’est à dire, le protocole de maintenance qui contient toutes les informations concernant le
défaut détecté, à savoir : le type du défaut, ses causes possibles, l’endroit de son apparition, les remèdes
nécessaires, etc.
A partir des résultats obtenus, nous pouvons faire les conclusions suivantes:
Après une recherche bibliographique effectuée (état de l’art) sur le diagnostic des défaillances des
machines électriques, il a été constaté qu’il existe plusieurs approches utilisées dans le monde
industriel. A cet effet, les plus commodes pour le diagnostic des systèmes électromécaniques sont
celles basées sur la connaissance des variations des comportements des machines à induction en
fonction des différents types de défauts. Pour ce faire, on doit élaborer un modèle mathématique de
comportement : sain et en présence de défaillances et/ou prélever expérimentalement la variation des
paramètres. Par la suite, il est nécessaire de sélectionner les variables indicatrices des défaillances
du système à étudier. A cet effet, nous avons constaté que pour le diagnostic des machines
électriques, les variables indicatrices des défaillances sont: la vitesse de rotation, le couple, le flux
électromagnétique, la tension d’alimentation et, en particulier, le courant statorique. D’autre part,
pour surveiller un système il faut choisir également les paramètres du diagnostic; à savoir: les
signatures obtenues après le traitement du signal des grandeurs indicatrices pour mieux caractériser
les défaillances. Nous donnons à titre d’exemple l’analyse spectrale du courant statorique et celle du
couple pour effectuer le diagnostic en ligne (on-line) des défauts rotoriques des machines
asynchrones à cage d’écureuil.
L’analyse des avantages et des inconvénients des différentes méthodes de diagnostic internes (du
modèle, de redondance, etc.) et externes (réseaux de neurones, système expert et logique floue)
permet de conclure que la méthode basée sur les réseaux de neurones artificiels est la plus
rationnelle pour la classification des signaux caractéristiques des défaillances des systèmes
électromécaniques en raison de ces avantages (capacité : de classification des signatures, de
mémorisation et de généralisation) est celle des réseaux de neurones artificiels. Par ailleurs, les
réseaux utilisés sont des réseaux multi couches entraînés par l’algorithme de rétro propagation. Le

Conclusion générale
123
choix de ce type de réseau est justifié par le fait que notre objectif est de détecter les défaillances des
machines asynchrones (à rotor en court-circuit et celle à rotor bobiné) par la classification des
signatures des variables indicatrices. En plus, ces réseaux de neurones ont prouvé leur efficacité
dans les travaux existant utilisant la classification des signatures (diagnostic des processus
industriels, traitement des paroles et de l’image, reconnaissances des formes, etc.)
Par la suite, nous nous sommes particulièrement intéressés aux défaillances des moteurs asynchrones
à cage d’écureuil vu, d'une part, la difficulté de son diagnostic (armature tournante) et, d'autre part, la
place qu'occupe cette machine à tous les niveaux de puissance. Pour ce faire, nous avons opté pour
une approche globale (modèle de Kirchhoff) basée sur la signature de grandeurs externes (couple,
courant, etc.) et qui utilise un schéma multi enroulement équivalent bien adapté à la simulation des
défauts rotoriques en question. Par la suite, en vue de faciliter l’étude, la transformation du modèle
multi enroulement en un modèle biphasé (modèle réduit) a été effectuée. Toutes les équations ont été
écrites dans un référentiel lié au rotor, car il y a des défauts situés justement à son niveau. Le modèle
obtenu a permis de simuler pratiquement les défauts au niveau du rotor (cassure de barres). D'autre
part, il permet de suivre les grandeurs externes (couple, courant, etc.). Cette analyse a permis de
connaître le comportement du moteur et de déduire les signatures caractéristiques des défauts, car il
est difficile d'analyser directement la valeur instantanée du courant statorique. En outre, lors de la
rupture de barres, nous avons effectué l'analyse spectrale pour le courant statorique, qui nous a révélé
les défauts des cassures des barres par des harmoniques adjacentes à la fréquence principale. En plus,
le modèle préétabli peut être développé pour identifier d’autres défauts qui peuvent surgir sur le
moteur, d’une part, dans sa partie rotorique (excentricité de l’arbre du moteur, déformation de
l’entrefer, etc.) et, d’autre part, dans la partie statorique (court-circuit entre spires des bobines, etc.)
ainsi que les défauts externes tels que les défauts d’alimentation. A cet effet, nous avons élaboré un
modèle triphasé équivalent au modèle multi-spires. Par ailleurs il est possible d’utiliser les
différentes méthodes du diagnostic pour la détection et la localisation des défauts de la machine
asynchrone (sur la base des signatures des grandeurs électriques et mécaniques obtenues à partir du
modèle étudié, à savoir: les valeurs échantillonnées du courant statorique et celles de la vitesse de
rotation ainsi que les valeurs efficaces des courants statoriques, des tensions d’alimentation et de la
valeur de la vitesse de rotation).
Par ailleurs, en vue de permettre la réalisation d’un système de diagnostic pour toutes les machines
asynchrones, nous avons effectué une étude expérimentale des défaillances de la machine
asynchrone à rotor bobiné associée à un convertisseur de fréquence SIMOVERT de marque
Siemens. Ce dernier est doté d’un logiciel qui permet de stocker les signatures des paramètres

Conclusion générale
124
mesurés en ligne (en temps réel) sous forme de données numériques. A partir des fonctions
existantes dans ces logiciels, on peut présenter ces paramètres sous plusieurs formes; à savoir: les
valeurs instantanées (valeurs échantillonnées, décimales, octales, logiques, etc.) et les valeurs
efficaces des grandeurs sinusoïdales, chose qui permet d’utiliser ces valeurs en qualité de signatures,
qui seront présentées par la suite à l’entrée du module de détection des défaillances à travers des
interfaces (ces dernières peuvent être entre matériel et logiciel ou entre deux logiciels par exemple
on pourrait transférer les données, qui proviennent du système d’acquisition, vers le logiciel
MATLAB).
Les variables indicatrices choisies (courants, statoriques, tensions et vitesse) sont présentées sous
plusieurs formes en qualité de signatures de référence qui seront par la suite utilisées comme entrées
des réseaux de neurones. A cet effet, nous avons proposé de comparer deux types de signatures:
celles des valeurs échantillonnées et celles des valeurs efficaces des paramètres, afin de choisir le
réseau le plus fiable et qui donne le degré de confiance le plus élevé pour la prise de décision. Les
réseaux étudiés utilisent comme couche de décision (couche de sortie) quatre sorties. Ces dernières
sont des valeurs numériques pouvant prendre des valeurs zéro ou un, sous forme des codes logiques
(0000 ; 0001 ; 0010, ……..,1111) où chaque code peut présenter une classe ou type de défaut. En ce
qui concerne leurs entrées sont utilisées, pour le premier RNA, les valeurs échantillonnées du
courant statorique et de le la vitesse de rotation. Tandis que nous avons utilisé les valeurs efficaces
des courants, des tensions, et la valeur de la vitesse de rotation comme entrées des deuxième et
troisième RNA. D'après l'étude effectuée, nous avons établi que l'augmentation du degré de
confiance pour la prise de décision dépend de l'utilisation de plusieurs variables indicatrices, ceci est
confirmé par les issues obtenus dans la phase de test des deux réseaux étudiés. En effet le réseau qui
a utilisé comme accès des valeurs efficaces des grandeurs (courant, tension, et vitesse) citées ci-
dessus, offre une aptitude de généralisation plus élevée de détection des défauts par rapport à celui
qui utilise des valeurs échantillonnées des deux grandeurs (courant et vitesse). En outre, les résultats
obtenus à l’issue de ce travail nous ont donné un aperçu convaincant sur les capacités de
généralisation et d’apprentissage que possèdent les réseaux de neurones.
Il a été procédé à la synthèse des différents éléments du système de diagnostic automatique des
défaillances des machines à induction. L’application du système de diagnostic automatique pour
l’identification des types de défauts les plus représentatifs a donné des résultats satisfaisants. A cet
effet, les résultats obtenus montrent clairement que le système de diagnostic automatique élaboré
permet, d’une part, de définir pour chaque type de défaut une fiche technique de diagnostic, et
d’autre part de procéder à la comparaison instantanée des données de références « donnée-défauts »
afin d’identifier le type et la nature du défaut et éventuellement son endroit d’apparition.

Conclusion générale
125
Perspectives
Ce travail représente la continuité des travaux menés depuis plusieurs années au niveau du
Laboratoire de Recherche sur l’Electrification des Entreprises Industriels (F.H.C, Université de
Boumerdès). Ces études ont pour objectif d’améliorer les performances des systèmes électromécaniques.
Pour atteindre ce but il a été indispensable de s’orienter, entre autres, vers le domaine du diagnostic. A
cet effet, nous avons comme perspectives, la réalisation expérimentale et le développement du système
intégral de diagnostic automatique (par l’association des modules d’acquisition, de traitement et
d’interprétation de l’information) d’un entraînement électrique à vitesse variable. Pour ce faire il faut
tout d’abord étudier tous les types de défauts (défauts statoriques, défauts rotoriques, défauts
mécaniques, défauts externes). En plus, il faut étudier des possibilités d’exploitation d’autres variables
indicatrices, telles que: le déphasage entre les courants ou entre la tension et le courant, le flux
électromagnétique, la puissance instantanée et le couple électromagnétique. Par ailleurs, en plus des
moteurs asynchrones, il est possible, également de s’intéresser à d’autres types de machines, à savoir; les
moteurs asynchrones à double stator et les moteurs synchrones à aimant permanent, etc.
Pour développer le système automatique de diagnostic, nous nous intéressons également à
l’utilisation d’autres logiciels tels que : LABVIEW. En effet, ce dernier possède des avantages comme
les fonctions de calcul, le système des blocs et d’interfaçage, qui nous permet de mieux exploiter les
avantages des réseaux de neurones artificiels ainsi que le traitement du signal des variables indicatrices.

Bibliographies
Bibliographies
[1] G.Rostaing, « Diagnostic de défauts dans les entraînements électriques», Thèse de Doctorat, laboratoire d’électrotechnique de Grenoble, 1997/ sous la Direction de J.C.Trigeassou.
[2] H. Razik, «Contenu spectral du courant absorbé par la machine asynchrone en cas de défaillance, un état de l’art», La Revue 3EI n°29, pp.48-52.
[3] G. Grellet ; «Les essais et la surveillance des machines tournantes », Revue générale d’électricité, n° 8, 1994,pp 22-28.
[4] G.Zwinngelsten, « Diagnostic des défaillances: théorie et pratique pour les systèmes industriels », Ed. Hermès Paris. 1995.
[5] S.Amrane, «Diagnostic de défauts des moteurs d’induction», Mémoire de magistère, Université A.Mira de Bejaia 2000.
[6] J.N. Chatain ; « Diagnostic par système expert », Ed, Hermès, Paris 1993.
[7] B.Dubuisson ; « Détection et diagnostic des pannes sur processus », Technique de l’ingénieur. R7597,1992.
[8] J.Morel ; « Vibrations des machines et diagnostic de leur état mécanique », Ed. Eyrolles, 1996.
[9] J.Richalet, « Modélisation et identification des processus », Technique de l’ingénieur R7140, Avril 1987.
[10] R.Casimir, «Diagnostic des défauts des machines asynchrones par reconnaissance des formes», Thèse de doctorat, l’école doctorale d’électronique, d’électrotechnique et d’automatique de Lyon, Décembre 2003.
[11] B.Dubuisson, « Détection et Diagnostic des pannes sur processus », Technique de l’Ingénieur. R7597, 1992.
[12] F.Felippitti, G.francescini,C.Tassoni, S.zond, P.vas ; «AI Techniques in induction machines diagnosis including the speed ripple Effect », IEEE Transaction on industries applications, vol.34, n°1,junnuary /February 1998.PP.98-108.
[13] S.Nandi, H.A.Tolyat, « Condition monitoring and fault diagnosis of electrical machines : A review », Industry applications conference, thirty-fourth IAS annual meeting conference record of the 1999 IEEE,vol.1 ,PP.197-202.
[14] Y.Shimakura, J.Inagaki, S.Fukui, S.Hori ; « An artificial neural network and knowlege based method for reasonning causes of power network faults», Ed. Technologie Update series.IEEE, 1996, PP.250-254.

Bibliographies
[15] E.Schaeffer, «Diagnostic des machines asynchrones : modèle et outils paramétriques dédiés à la simulation et à la détection des défauts», Thèse de Doctorat, Décembre 1999, Ecole générale de Nantes, France/sous la direction de E. Le Carpentier.
[16] D.Pomorski, P.B.Perche ; «Diagnostic et arbre de décision : Application à la surveillance partielle d’un moteur asynchrone" », Journal Européen des Systèmes automatisés ‘JESA’,2000, vol34-n°4, PP.441-477.
[17] B.Chetate, DJ.Khodja, « Diagnostic en temps réel des défaillances d’un ensemble Moteur asynchrone-convertisseur électronique en utilisant les réseaux de neurones artificiels», Journal Electrotekhnika, Moscou 12/2003, pp : 16-20.
[18] F.Filippetti, G.Franceschini, C.Tassoni, P.Vas ; « A fuzzy logic approach to on-line induction motor diagnosis based on stator current monitoring », IEEE-KTH, Stockholm, Sweden, June, 1995. pp.156-161.
[19] X.Chang, V.Conquenmpot, C.Christophe, «Modélisation de la machine asynchrone en présence de pannes du stator», http://www.univ-lille1.fr/lail 2002.
[20] L.Baghli ; « Contribution à la commande de la machine asynchrone, utilisation de la logique floue, des réseaux de neurones et des algorithme génétiques » ; Thèse de Doctorat.1999, Nancy. France /sous la direction de rsM J.Faucher.
[21] D.G.Dorrel, «The influence of rotor eccentricity on the out put torque of cage inductor motors», ICEM 94, France, pp. 35-40.
[22] M.J.Debortele, S.J.Salon, D.W.Burow and C.J.Slavik, «Effects of rotor eccentricity and parallel windings on induction machine behavior:a study using finite element analysis», IEEE Trans. On magnetics, vol.29, n°2, March 1993, pp. 1676-1682.
[23] M.F.Cabanas, M.G.Meluo, J.G.A.leixandre and J.Solares, «Shaft misalignement diagnosis of induction motors using current spectral analysis: A theorical approach», ICEM 96, Spain, pp. 384-389.
[24] R.K.Rayandu, S .Samarasinghe, D.Kulasivi, « A comparison of model-based reasoning and learning approaches to power transmission fault diagnosis », Artificial neural network and expert system, proceedings, second New Zealand international tow-stream conference on published. IEEE 1995. Pages 218-222.
[25] R.Bigret, J.L.Feron ; « Diagnostic, maintenance et disponibilité des machines tournantes », Ed, Masson, Paris 1994.
[26] C.Faure, L.Miclet ; « Intelligence artificielle et reconnaissance des formes », Technique de l’ingénieur H1900, Juin 1990.
[27] J.Hato ; « Intelligence artificielle et reconnaissance des formes, Introduction »,Technique de l’ingénieur , H1900, juin 1990.

Bibliographies
[28] F.Filippetti, G.Franceschini, C.Tassoni ; « Neural Networks approach to electric machine on-line diagnostics”. EPE BRIGHTON 93, pp.213-218.
[29] H.Bûller ; « Réglage par logique floue », Presse Polytechnique Romandes, 1994, Lausanne.
[30] E. Davalo, P. Naim ; « Des réseaux de neurones », éd. Eyrolles, Paris, 1993.
[31] M.Gondran, C.Miller. « Réseaux de neurones et apprentissage », Revue REE no 3, mars 1997,pp.6-9.
[32] M.R.Zemouri, «Contribution à la surveillance des systèmes de production à l’aide desréseaux de neurones dynamiques: Application à la e-maintenance», Thèse de Doctorat, Nov 2003, l’URF des sciences et techniques, U.Franche-Comté, France/sous la direction du Pr N.Zerhoni.
[33] D.Gaetan et R.Hubert, «Sur la détection d’un défaut au rotor des moteurs asynchrones», Article, GREEN-UHP faculté des sciences, décembre 2001.
[34] M.Jufer et A. Abdelaziz, «Influence d’une rupture de barre ou anneau sur les caractéristiques externes d’un moteur asynchrone à cage», Bull.SEV/VS69, 5 Sept.78, pp. 921-925.
[35] E. Ritchie, X. Deng and T. Jokinen, «Dynamic model of three-phase squirrel cage induction motors with rotor faults» , ICEM 94. B6(2), pp. 694 – 698.
[36] S.Williamson and A. C Smith, « Steady-state analysis of 3-phases cage motors with rotor bar and end-ring faults», IEE Proc, vol.129, Pt B, n°3, May 82, pp. 93-100.
[37] W. Deleroi, « Broken bar in squirel-cage rotor of an induction motor, part 1: Description by super imposed faults currents», Archiv für electrotechnik 67; 84. pp.91-99.
[38] H. Yahoui, « Contribution à la surveillance et au diagnostic des machines électriques», Thèse de Doctorat, Juillet 95, Lyon 1, France.
[39] P.Vas , F.Filippetti, G.Franceschini and C.Tassoni, « Transient modelling oriented to diagnostics of induction machines with rotor asymmetries», ICEM 94, C3(1), pp. 62-67.
[40] M.Bouharkat, « Etude de l’Evolution des courants rotoriques d’une machine asynchrone à cage en régime dynamique», Thèse de doctorat 15 Février 2006, Université de Batna/ sous la Direction de Mr N.E.Bouguechal.
[41] T.Boumegoura, «Recherche de signature électromagnétique des défauts dans une machine asynchrone, et synthèse d’observateurs en vue du diagnostic», thèse de doctorat, l’école doctorale électronique, électrotechnique, automatique de Lyon, Mars 2001.

Bibliographies
[42] M.S.Naït Saïd, M.H.Benbouzide, A.Benchaib, “Detection of broken bars in induction motors using an extended Kalman filter for rotor resistance sensorless estimation”, IEEE transaction on energy conversion, vol. 15. no. 1. March 2000, PP 66-70.
[43] G.H. Muller and C.F Landy, «Finite element analysis of distribution of squirel cage induction motor having broken bars and interbar currents», ICEM 94, Paris 5-8 Sept94, pp. 577-581.
[44] R.F. Walliser, C.F Landy, «The influence of interbar currents of the detection of broken rotor bar», ICEM 91, Paris, Sept91, pp. 1246-1250.
[45] N.M. Elkasabgy, A.R. Easthan and G.E. Dawson, «Detection of broken bars in the cage rotor on an induction machine», IEEE Trans. On industry application, vol.28, n°1, junuary/February 1992, pp. 165-171.
[46] D.G.Dorrell, N,C.Paterson, J.F.Watson, «The causes and quantification of sideband currents for us in rotor fault systems for cage induction motors», ICEM 96, Spain, pp. 414-419.
[47] H. Yahoui, G.Grellet, «Analysis of harmonic compoenets of the ellectromagnetic torque of an asynchronous motor with an end-ring fault», ICEM 96, Spain, pp. 396-399.
[48] H.Jaco Aimé, «Modélisation des moteurs asynchrones triphasée en régime transitoire avec saturation et harmoniques d’espace», Thèse de Doctorat, 1997, Lyon 1, France.
[49] M.Drif, N.Benousa and J.A.Dente, «Rotor cage faults detection in 3-phases induction motors using instantanous power spectrum», CMGE 99, Constantine, pp. 479-485.
[50] N.Benousa, M.Drif, A.J.Marques, Cardos et J.A.Dente, «Détection des défauts de barres dans les moteurs asynchrones à cage par l’approche des vecteurs de Park»,SNGE 99, Biskra, pp. 224-227.
[51] A.Bentounsi and A.Nicolas, «On-line diagnosis of defaults on sauirel cage motors using FEM», IEEE Trans. On magnetics, vol.34, n°5, Sept 1998, pp. 3511-3514.
[52] C.Doncarli, E.Schaeffer, T.Gouraud and M.E.Zaim, «Simulation and Detection of faults in induction machines under varying speed», IEEE Proc. 1997. International symposum on diagnostics for electrical machines , Power electronics and drivers, pp.3-8.
[53] A.G.Innes and R.A.Langman, «The detection of broken bars in variable speed induction motor drives», ICEM 94, France, pp. 294-298.
[54] G.Didier, «Modélisation et diagnostic de la machine asynchrone en présence de défaillances», Thèse de Doctorat, Oct 2004, U.Nancy, France/ sous la direction de A.H.Razik
[55] R.Scattolini and N.cattane « Detection of sensor faults in a large flexible structure», IEEE proc.control.theory.Appl, vol.146,n°5, September 1999,pp.383-388.

Bibliographies
[56] B.Chetate, A.Lebaroud, “Development of an automated system of forecasting and diagnosis of the anomalies”, Proceedings of the second Maghreb Convention in Electrical Engineering (CMGE'95), Volume II, September 1995 School of Instructors’Training, Tunis, (Tunisia) pp. GLI 17-GLI 2016-17.
[57] B.Chetate, A.Lebaroud, "Approch for the elaboration of a diagnosis automated system of electric machine breakdowns”, Cements Concretes Plasters Lime Journal (Revue Ciments Betons Platres Chaux), N°823-6/96, pp.428-431, ISSN 0397 - 006X, France.
[58] B.Chetate, “Automatic diagnosis of electromechanical system anomalies”, Proceedings of International Annual Conference of the University of Batna (IEEA'97), pp.289-293 December 07-09, 1997, University of Batna (Algeria ).
[59] A.Lebaroud, «Le diagnostic automatique des défaillances des systèmes électromécaniques», Mémoire de Magistère, INHC, 1997/ sous la Direction de Mr B.Chetate.
[60] B.Smaïl, «Contribution au diagnostic de la machine asynchrone par estimation paramétrique», Thèse de Doctorat, Ecole supérieure d’ingénieur de Poitiers, France, Décembre, 2002/ sous la Direction de Mr J.C.Trigessou.
[61] B.Chetate, “Elaboration of an expert system allowingthe rational choice of asynchronous motors”, Proceedings of Conference on Modelling and Simulation in Electrical Systems (CMSES'95), University of Guelma, (Algeria), 07-08 November,1995, pp. Pp.163-169.
[62] B.Chetate, A.Lebaroud, “ Interpretation module elaboration of information and its application for the recognition of asynchronous motor faults”, Proceedings of International Annual Conference of the University of Batna (IEEA'97), pp.94-97, University of Batna (Algeria ) December, 07-09, 1997.
[63] B.Chetate, A.Lebaroud, “About real-time intelligent failure diagnosis of electromechanical systems”, Proceedings of the third Maghreb Days on Mechanics, (Algeria), University of Guelma Hammam Debagh - Guelma (Algeria), 29-30 April 1997, Volume I, pp.404-409.
[64] T.Sorsa, HN.Koivo, « Neural networks in process fault diagnosis », IEEE transaction on systems , vol. 21,n° 4, july-august 1991.pp.815-825.
[65] J.P.Caron, J.P.Hautier ; « Modélisation et commande de la machine asynchrone », édition Technip,1995.
[66] J.Chatelain ; « Machines électriques », édition Dunod-Suisse, 1983.
[67] G.Grellet, G.Clerc ; «Actionneurs électriques », Edition Eyrolles 1997.
[68] M.O Mahmoudi ; « Sur la commande de la Machine Asynchrone Alimentée en tension », Thèse de Doctorat, ENP,Alger, 1999/ sous la Direction de Mr F.Boudjema.

Bibliographies
[69] P.Vas, « Vector control of AC machine », Clarendon press oxford,1990, USA.
[70] W.Leonard, «Control of electrical drive », Edition Prentice Hill, 1986.
[71] S.Rehahla ; «Etude de la commande d’une machine asynchrone triphasée par la technique du flux orienté », Thèse de magister. 1996 ENP, Alger /Sous la Direction de Mr B.Hemissi.
[72] A.R.Munoz, T.A. Lipo, «Complex vector model of the squirrel – cage induction machine including instantaneous rotor bar currents », IEEE Tranactions on Industry Applications, VOL. 35, NO. 6, Nov – Dec 1999.
[73] H. Hénao, H. Razik, G.-A. Capolino, «Analytical approach of the stator current frequency harmonics computation for detection of induction machine rotor faults», IEEE-SDEMPED 2003, August 24-26, 2003, Atlanta, USA.
[74] H. Razik, A. Abed, G. Didier, F. Weinachter,A. Rezzoug, «Analysis of the current spectral of an induction motor for diagnostic purposes», 26 - 28 August 2002, Bruges, Belgium. ICEM'2002.
[75] G. Didier and H. Razik, «Sur la détection d'un défaut au rotor des moteurs asynchrones», revue 3EI no27, December 2001, pp. 53-62. ISSN :1252-770X.
[76] O.Touhami, L.Noureddine, R.Ibtiouen, M.Fadel, « Diagnostic of Induction Rotor Defects from an Approach of Magnetically Coupled Multiple Circuits», Proceedings of the 38th Southeastern Symposium on System Theory, Tennessee Technological University, Cookeville, TN, USA, PP. 492-496, March 5-7, 2006.
[77] Vinnod V.Thomas, K.Vasudevan, V.J.Kumar, « Online Cage Rotor Fault Using Air-Gap Torque Spectra», IEEE, Transaction on Energy Conversion, Vol 18, N° 2, PP. 265-270, June 2003.
[78] M.H.Benbouzid, G.B.Kliman, « What Stator Processing-Based Technique to Une for Induction Motor Rotor Faults Diagnosis?», IEEE, Transaction on Energy Conversion, Vol 18, N° 2, PP. 238-244, June 2003.
[79] Siemens ‘Manuel’, «Vector Control ‘conpodium» , Simovert- Masterdrive 1998. Edition AF order no : 6SE7D87-6QX60.
[80] DJ.Khodja, B.Chetate, «Development of Neural Network module for fault identification in Asynchronous machine using various types of reference signals», 2nd International Conference PHYSICS and CONTROL, August,24-26, Physcon 2006, St Ptersburg, Russia. pp : 537-542.
[81] DJ.Khodja, B.Chetate, «ANN system for identification and localisation of faillures of anatomawed electric asynchronous drive», 2nd International Sy,posium on Electrical,

Bibliographies
Electronic and Computer engineering en Exhibition, March, 11-13, NEU-CEE 2004, NICOSIA, TRNC pp : 156-161.
[82] DJ.Khodja, B.Chetate, «Diagnostic en temps réel des défaillances d’un ensemble Moteur asynchrone-convertisseur électronique par la comparaison de trois réseaux de neurones artificiels», Revue des énergies renouvelable, ISSN 1112-2242, Proceedings of the first international conference on Energy Efficiency, May 2003.
[83] A.M.J.Desort, F.Wawak, D.Jolly ; «Conception d’un système d’aide à la décision utilisant les théories floues et possibiliste » APII-JESA, Vol 33,n°3/1999.PP 337-357.
[84] J.M.Karkan, G.Tjoen ; «Systèmes experts, un nouvel outil pour l’aide à la décision », Ed. MASSON,1993.
[85] A.Revna, Y.Tülay, “An artificial neural network approach to diagnosis of erythmato-squamous disease», 2nd international symposium on electrical, electronic and computer engineering, ISBN: 975-8359-32-0, Near East University (Nicosia), March 11-13 2004 pp.230-233.
[86] A.hashman, B.Sekeroglu, «Banknote identification using neural networks and image proceeding», 2nd international symposium on electrical, electronic and computer engineering, ISBN: 975-8359-32-0, Near East University (Nicosia), March 11-13 2004 pp.272-275.
[87] J.F.AbouHasna, F.Mamedov, «Signal denoising using integration of wavelet and neural network», 2nd international symposium on electrical, electronic and computer engineering, ISBN: 975-8359-32-0, Near East University (Nicosia), March 11-13 2004 pp.276-281.
[88] S.Chauhan, M.P.Dave, «ANN for transmission system static security assessment», Electrical power and energy systems, vol 24, 2002. PP. 867-873.
[89] B.Chetate, M.T.Belassel, T.Benslimane, DJ.Khodja, M.Omrani, «Reliability Improvement of Induction Motor Electric Drive», INISTA 2005, International symposium on innovation in intelligent systems and applications, ©Yildiz University, pp : 44-48.
[90] M.E.Hawary ; « Detection and lacalization of shorted turns in the DC field winding of turbine-generator rotors using novelty detection and fuzzified neural networks », Electronic Power Applications of Fuzzy Systems, Ed IEEE press, 1998, PP.85-111.
[91] N.Kandil, V.K.Sood, K.Khorasani, RV.Patel ; « Fault identification in AN AC-DC transmission using neural networks », IEEE .Transaction on power systems, May 1992, Vol.7 ,n°2, 1992, PP.812-819.
[92] M.J.Boeck ; «Experiments in the application of Neural Networks to Rotating machine fault diagnosis», IEEE Intern. Juin conf on neural network, vol.1, 1992, pp.769-774.

Bibliographies
[93] MR.Napolitano, V.Cadorph, C.Neppach, S.Naylor, M.Innocenti and G Silvestri ; « On learning neural architectures and cross-correlation analysis for actuator detection and identification»,INJ.J control,1996,vol. g3, n°3 , PP 433-455.
[94] F.Ponci, «Virtual system faults for training fault identifiers”, 2003 VBT Users and Developers Conference, 17-18 Sept 2003, Cananda.
[95] J. Hérault, C.Jutten ; « Réseaux neuronaux et traitement du signal », Ed. Hermès, Paris, 1994.
[96] Patrick, K.Simpson ; « Fondations of neural network », Technologie Update series, IEEE 1996.PP.1-20.
[97] T.Fukuda,, T.Shbata ; « Theory and application of neural networks for industrial systems » , IEEE Transaction on industrial electronics, vol 39, oN 6, December 1992. pp,472-489.
[98] J.A.Freman, D.M.Skapura ; « Neural networks : algorithm, applications and programming techniques », CNS, Computation and neural systems series, 1992.
[99] G.Dreyfus, J.M.Martinez, « Réseaux de neurones, Méthodologie et application », Paris Eddition Eyrolles, 2002.
[100] Dj.Khodja, «Diagnostic automatique des défaillances du système électromécanique par application des réseaux de neurones artificiels», Mémoire de Magister, Faculté des Hydrocarbures et de la Chimie, U.Boumerdès, Juin 2001/ Sous la Direction de Mr B.Chetate.
[101] B.Li, Y.C.Mo, T.Yodyium, J.C.Hung, « Neural Network Based Motor Rolling Bearing Fault Diagnosis», IEEE, Transaction on Industial Electronic, Vol 47, N°5, PP. 1060-1069, Oct 2000.
[102] A.Murry, J.Penman, «Extracting usefull higher order features for condition monitoring using artificial neural network», IEEE transaction on signal processing, Vol, 45, N°11, November 1997, PP. 2821-2828.
[103] A.R.Sadeghian, Z.Ye, B.Wu, «Induction motor mechanical fault on-line Diagnostic with the application of neural networks», IEEE Proceeding 2001, PP. 1015-1020.
[104] V.I.Komachinski, D.A.Omirnov, «Réseaux de Neurones et leurs utilisations dans les systèmes de commande et de connexion», Ed, Ligne Chaude, telecom, Moscou, 2002.
[105] V.A.Tolovka. « Réseaux de neurones : Apprentissage, Organisation et Utilisation », Ed, Entreprise de rédaction de journal ‘Radiotekhnika’ Moscou, 2001.

Annexes

Annexe1- Contenu spectral des paramètres de la machine asynchrone en présence des défauts
Tab.1. : Synthèse des signatures des défauts
Type de défaut Signaux et signatures Variation desparamètres
Observations
Courants Couple Vibrations Flux AM : avec modèleSM : sans modèle
Rupture de barres
ou de portions d'anneaux
Flux axial :
Excentricité:- statique
- dynamique- globale
Annexes s

Type de défaut Signaux et signatures VariationDes
paramètres
Observations
Courants Couple Vibrations Flux AM : avec modèleSM : sans modèle
Défaillance de paliers bagues externes :
Désalignement On parle de désalignement : Parallèle et/ou angulaire Des paliers
De l'arbre (torsion)
Court-circuit entre spires au stator
DETECTION
k = 1,3,5…
Annexes s


Annexes
Annexe 2-Paramètres des machines étudiées dans les chapitres 2 et 4
Machine n°1 [20]:
Plaque signalétique : Constructeur : ABB
U:220/380 V
In: 4.5/2.6A
n : 2850 tr/min
Pn=1.1 kW
Les paramètres utilisés:
Rs = 7.828
Rr = 6.3
J = 0.006093 Kg m2
f = 0.000725 Nm s /rd
Rayon = 0.03575 m
Longueur = 0.065 m
Entrefer = 0.00025 m
Ns = 160
Nr = 16
Lsl = 0.018 H
Rbsain = 150 10-6
R=11* Rbsain = 0.00165
Re(sain) = 72 10-6 (totale)
Lb = 10-7
Le = 10-7 H
Ts = 0.0752
Tr = 0.145
= 0.0487

Annexes
Machine n°2:
Paramètres de la machine utilisée en expérimentation
Puissance nominale : 1.4 kW
Rendement nominal : 0.615
Tension nominale : 380/220 V
Vitesse nominale : 885 tr/mn
Fréquence : 50 Hz
Courant nominal : 3.10/5.3 A
Résistance d’une phase statorique : 5.78
Résistance d’une phase rotorique : 0.77
Réactance d’Inductance d’une phase statorique : 3.6
Réactance d’Inductance d’une phase rotorique : 0.566
Nombre de paires de pôles : 3
Moment d’inertie : 0.021 Kg.m2
Masse : 51 kg
Paramètres de la charge (machine à courant continu)
Puissance nominale: 1.9 kW
Rendement nominal: 0.8
Tension nominale: 110 V
Courant nominal d’induit: 21 A
Courant maximal d’induit: 81 A
Vitesse nominale: 1000 tr/mn
Courant nominal d’excitation: 0.75A
Courant nominal d’induit: 21 A
Résistance d’induit: 0.245
Moment d’inertie: 0.057 kg.m2
Masse: 118 kg

Annexes
Calcul des coefficients A1, A2, A3 et A4 dans le cas d’une cassure d’une barre
Pour simuler la rupture de la première barre (k=0) donc Rb cassé = 11*Rb sain
Les valeurs de A1, A2, A3 et A4 deviennent:-
A1= 3.29213*10-5
A2= 5.45625*10-6
A3= 5.45625*10-6
A4= 3.29213*10-5
Calcul des coefficients A1, A2, A3 et A4 dans le cas d’une cassure d’une barre
de deux barres
On simule la rupture de deux barres adjacentes (K=0, K=1)
Les valeurs de A1, A2, A3 et A4 deviennent:-
A1= 4.11738*10-5
A2= 1.86375*10-5
A3= 1.86375*10-5
A4= 4.11738*10-5

3 3
2 2 3 3ra sb sc r r r
sa sa sb sc ra rb rc
d f f R A R B R Bf i i i wr wr
dt C C C
3 3
2 2 3 3rb sa sc r r r
sa sb sb sc ra rb rc
d f f R B R A R Bi f i i wr wr
dt C C C
3 3
2 2 3 3rc sa sb r r r
sa sb sc sc ra rb rc
d f f R B R B R Ai i f i wr wr
dt C C C
sadi
dt 2 2
1 sb sc sad f f u 22 sa sb sc sbd f f f u 2
2 sa sb sc scd f f f u 2 2 2 2 21 2 1
3
2 sa sb sc s sa sb sc sad d Tf f f R d f f f i
3 2 2 21 22
33
2 2 sa sb sc s sa sb sc sb
d dTf f f R d f f f i
2 3 2 21 22
33
2 2 sa sb sc s sa sb sc sc
d dTf f f R d f f f i
2 2 3 3
2 2 2 2sa sb sc ra rb rc
G GKf f f G wr wr
sbdi
dt 2
2 sa sb sc sad f f f u 2 21 sa sc sbd f f u 2
2 sa sb sc scd f f f u 3 2 2 21 22
33
2 2 sa sb sc s sa sb sc sa
d dTf f f R d f f f i
2 2 2 2 21 2 1
3
2 sa sb sc s sa sb sc sbd d Tf f f R d f f f i
2 3 2 21 22
33
2 2 sa sb sc s sa sb sc sc
d dTf f f R d f f f i
2 2 3 3
2 2 2 2sa sb sc ra rb rc
G GKf f f wr G wr
scdi
dt 2
2 sa sb sc sad f f f u 22 sa sb sc sbd f f f u 2 2
1 sa sb scd f f u 3 2 2 21 22
33
2 2 sa sb sc s sa sb sc sa
d dTf f f R d f f f i
2 3 2 21 22
33
2 2 sa sb sc s sa sb sc sb
d dTf f f R d f f f i
2 2 2 2 21 2 1
3
2 sa sb sc s sa sb sc scd d Tf f f R d f f f i
2 2 3 3
2 2 2 2sa sb sc ra rb rc
G GKf f f wr wr G
Annexe3- Modèle global de la machine asynchrone en présence des défauts statoriques
Annexes s
Equations des flux :
Equations des courants statoriques :

A= 2
2
4r
rf r
Ml M ;
B=23
2 4r rf rM l M
;
C= 3 2 293
4rf rf r r rfl l M M l
sr rM R A B
C
;
;
23
2sr
sr
M A Bz M
C
;
rfz l ;2
2
2 4
z zH
;
2 32 2 2 3 3
4 4sa sb sc
z zf f f
2
2
1 4sf
zd z l ;
2
2 2 4sfz z l z
d
;
srM H A BK
C
;
rR A BG
C
.
22
2sr rM R A B
TC
Annexes
Les coefficients utilisés :

Annexes
Annexe 4
1. Présentation en ligne des sorties de RNA2 en présence du défaut
Figure.1. Le modèle de la machine asynchrone associé
au réseau de neurones artificiels.

Annexes
2. Présentation de l'architecture interne du RNA (SIMULINK)
couches cachées
Figure 2.a. Architecture de la première couche cachée
1
Out2
w
pz
dotprod8
w
pz
dotprod7
w
pz
dotprod6
w
pz
dotprod5
w
pz
dotprod4
w
pz
dotprod3
w
pz
dotprod2
w
pz
dotprod1
Mux
Mux
weights
IW{1,1}(8,:)'
weights
IW{1,1}(7,:)'
weights
IW{1,1}(6,:)'
weights
IW{1,1}(5,:)'
weights
IW{1,1}(4,:)'
weights
IW{1,1}(3,:)'
weights
IW{1,1}(2,:)'
weights
IW{1,1}(1,:)'
1
In2

Annexes
Figure.2.b. Architecture de la deuxième couche cachée
Couche de sortie
Figure.3. Architecture de la couche de sortie
1
Out2
w
pz
dotprod5
w
pz
dotprod4
w
pz
dotprod3
w
pz
dotprod2
w
pz
dotprod1
Mux
Mux
weights
IW{2,1}(5,:)'
weights
IW{2,1}(4,:)'
weights
IW{2,1}(3,:)'
weights
IW{2,1}(2,:)'
weights
IW{2,1}(1,:)'
1
In2
1
Out2
w
pz
dotprod4
w
pz
dotprod3
w
pz
dotprod2
w
pz
dotprod1
Mux
Mux
weights
IW{3,2}(4,:)'
weights
IW{3,2}(3,:)'
weights
IW{3,2}(2,:)'
weights
IW{3,2}(1,:)'
1
In2

Annexes
Annexe 5 - Présentation de l’algorithme de rétropropagation
Toute information que possède un réseau de neurones est représentée par les poids
d’interconnections, cette information est acquise durant la phase d’apprentissage.
Cette propriété d’apprendre a permis l’application de tels réseaux dans plusieurs
domaines: contrôle, identification, diagnostic, etc. [4].
Par ailleurs, cet algorithme que l’on désigne couramment par «Back propagation »
est une généralisation de la règle de « WIDROW HOFF » pour un réseau multi
couches.
Il a été mis au point simultanément par deux équipes indépendantes en
France «FEGLAMM SAULIE, GALLINARI, LECUN » et aux Etats-Unis
«RUMELHART, HITON, WILLIAMS ».
L’idée simple qui est à la base de cet algorithme et qui permet de lever la
difficulté du « crédit assignent problème » est l’utilisation d’une fonction dérivable
(fonction sigmoïde) en remplacement de la fonction de seuil utilisée dans le neurone
linéaire à seuil [4, 30, 31].
Mathématiquement, cet algorithme utilise simplement les règles de dérivation
composée et ne présente aucune difficulté particulière.
Le principe de cet algorithme est que, de même que l’on est capable de propager
un signal provenant de cellules d’entrée vers la couche de sortie, on peut, en suivant
le chemin inverse, rétro propager l’erreur commise en sortie vers les couches
internes.
L’apprentissage supervisé consiste à ajuster les coefficients synaptiques pour
que les sorties du réseau soient les plus proches possibles des sorties de l’ensemble
d’entraînement. Donc il faut spécifier une règle d’apprentissage pour l’adaptation de
ces paramètres.
Pour remédier à ce problème, on utilise la méthode de rétro propagation de
l’erreur pour l’apprentissage des réseaux statiques multi couches (voir la figure.1)
[30].

Annexes
1. Modèle et équation du réseau :
Le réseau utilisé est un réseau multi couches, comportant une couche
d’entrée qui correspond à la rétine, une couche de sortie qui correspond à la décision
et un certain nombre de couches dites cachées. Ces couches cachées constituent la
véritable représentation du problème [4, 30, 31, 92, 93, 94, 95, 96, 97].
Le neurone utilisé dans le réseau est fondamentalement de même nature que le
neurone linéaire à seuil du perceptron, il applique une fonction à la somme pondérée
de ses entrées, cette fonction est une version lissée de la fonction à seuil, on utilise en
général la fonction sigmoïde qui s’écrit:
ƒ(S)=1/(1+e-s) (1)
Les états des différents neurones dans un réseau ayant « L» couches (couches
cachées et couches de sortie) données ayant « N» entrées et « M» sorties, sont
données par les équations suivantes:
Opi=ƒ(Spi) (2)
Avec:
Op1Wj1
Op2
OpjWj2
Wjn Opn
Couches cachées
Couche de sortieCouche d’entrée
Signal flow
Opk tpk
Rétro propagation de l’erreur (algorithme d’apprentissage)
0;1;0……....
0;0;1……
0.21;0.50;-0.25……......
0.22;0.42;-0.75……..
Entrées Sorties
calculées Sorties désirées
Figure.1 Mécanisme d’apprentissage des RNA multi-couches par l’algorithme de rétropropagation

Annexes
Spi=∑Wij.Opi (3)
Où:
Opi : La sortie de neurone i pour l’exemple (entrée, sortie désirée) p;
Spi : Le potentiel somatique du neurone i pour l’exemple (entrée, sortie
désirée) p;
Wij : Coefficient synaptique (poids) de la jeme entrée du neurone i.
2. Principe de rétro propagation:
La rétro propagation est basée sur l’adaptation des coefficients synaptiques
dites encore des coefficients de pondération dans le but de minimiser une fonction
de coût (performance) donnée par:
p E(W)=∑Ep(W) (4) P=1 n
Ep(W)=½∑(tpi–Opi)2 (5)
i=1
Où: tpi et Opi Représentant respectivement la sortie désirée (Target) et la sortie
(output) du réseau;
P: Le nombre d’exemple ou de la longueur de l’ensemble d’entraînement.
La minimisation de l’erreur se fait par l’approximation d’une descente de
gradient comme dans la règle de Widrow Hoff (règle delta). Toute la difficulté pour
effectuer cette descente dans un réseau multi couches était de pouvoir calculer la
dérivée de l’erreur quadratique par rapport à un poids donné.
3. Adaptation des poids
L’adaptation (ajustement, mise en forme) des coefficients synaptiques, se fait
par la méthode du gradient basée sur la formule itérative suivante:
Wij(n+1)=Wij(n)+∆Wij(époque) (6)
∆pWij=- . Ep/Wij (7)

Annexes
Où: n: Représente le numéro d’itération;
: Représente le pas d’apprentissage. Ce facteur influe sur la vitesse de
convergence du réseau.
La dérivée partielle de E (W) par rapport à chaque poids du réseau, pour cela
et en utilisant la règle delta généralisée. Nous devons charger notre poids lié à:
∆pWij= . pi.Opj (8)
Avec:
Opj: Sortie du neurone j pour un exemple p;
pi : L’erreur commise à la sortie du neurone i pour l’exemple p, posant
maintenant:
pi=-Ep/ Spi=(tpi–Opi) (9)
L’astuce est de calculer pi pour chaque neurone dans le réseau. Le résultat
intéressant que nous avons obtenu maintenant, est qu’il y a un simple calcul récursif
des qui peuvent être implémentés par la rétropropagation du signal d’erreur à
travers le réseau.
Pour calculer:
pi = -Ep / Spi
En applicant la décomposition en chaîne pour exprimer la dérivation partielle,
nous obtenons:
pi = -Ep / Spi = -Ep /Opi . Opi / Spi
Calculons le deuxième facteur de l’équation (9) nous constatons que:
Opi / Spi = ƒ’(Spi).
Où: ƒ’ (Spi) : Est la dérivée de la fonction d’activation du neurone ‘i’ évaluée à Spi.
Pour calculer le premier facteur nous considérons deux cas:

Annexes
Supposant que le neurone Ui est un neurone de sortie du réseau, dans se cas, il parait
de la définition de Ep que:
Ep /Opi = - (tpi – Opi).
Substitutions les deux facteurs dans l’équation (9) nous obtenons:
pi=(tpi–Opi)F’i(Spi) (10)
Pour tout neurone de sortie Ui.
Si Ui n’est pas un neurone de sortie, nous utilisons la décomposition en chaîne pour
écrire:
∑ Ep / Spk * Spk / Opi= ∑ Ep / Spk* / Opi ∑ Wki Opi =
= ∑ Ep / Spk Wki = ∑ pk Wki.
Dans ce cas, en substituant les deux facteurs dans l’équation (9) nous
obtenons:
pi=ƒ’(Spi)∑ pk*Wki (11)
Où: Ui est un neurone appartenant aux couches cachées.
Les équations (10) et (11) donnent une procédure récursive pour calculer les
pour tout neurone dans le réseau lié à l’équation (7), cette procédure constitue «la
règle delta généralisée» pour un réseau statique et aussi pour le neurone non linéaire.
Pour minimiser l’erreur totale sur l’ensemble des entraînements, les poids du
réseau peuvent être ajustés par la présentation de l’ensemble d’apprentissage en
entier.
La variation des poids ∆pWij (n) peut alors s’écrire ainsi:
∆pWij(n)= Ep(W)/Wij(n) (12)

Annexes
4. Les ’étapes de l’algorithme de rétro propagation:
L’algorithme de rétro propagation est représenté comme suit [4, 30, 31,92, 93,
94, 95, 96, 98]:
Etape 01 : Initialiser les poids Wij et les seuils internes des neurones à de petites
valeurs aléatoires.
Etape 02 : Présenter l’ensemble des couches (entrée, sortie désirée).
Etape 03 : Présenter le première couché (entrée, sortie désirée) de l’ensemble.
Etape 04 : Calculer:
1- La somme des entrées des neurones de la couche cachée par l’équation (3);
2- Les sorties des neurones de la couche cachée par l’équation (2);
3- La somme des entrées de la couche de sortie par l’équation (4);
4- Les sorties de réseau par l’équation (2).
Etape 05 : Calculer:
1- Les termes de l’erreur pour les neurones de la couche de sortie par l’équation
(10) ;
2- Les termes de l’erreur pou les neurones de la couche cachée par l’équation
(11).
Etape 06 : Calculer la variation des poids par l’équation (8).
Etape 07 : Calculer l’erreur Ep par l’équation (5).
Etape 08 : Présenter un autre couple (entrée, sortie désirée) et aller à l’étape quatre.
Etape 09 : Si tout l’ensemble des couple est présenté, calculer la variation total des
poids par époque, en utilisant l’expression :
p ∆ Wij (époque) =∑ ∆p Wij. P=1
Etape 10 : Ajuster les poids par l’équation (6).
Etape 11 : Calculer l’erreur totale par l’équation (4).
Etape 12 : Comparer l’erreur totale avec une erreur prédéterminée (EPR).
[E – EPR < ].
Si la condition est vérifiée aller à l’étape 13.
Si non aller à l’étape 03.
Etape 13 : Fin

Annexes
5. Algorithme de rétro propagation
P∆ Wij
(époque) =∑ ∆p Wij. P=1
Wij (n+1) = Wij (n) + ∆ Wij(époque)
p E (W) = ∑ Ep (W) P=1
| E – E PR | < ε
FIN
Oui
Non
Début
Initialiser les poids Wij et les seuils internes des neurones à de petites valeurs aléatoires.tpi : la sortie désirée (Target), Opi : la sortie (output) du réseau, F’i (Opi) :la dérivée de la fonction d’activation du
neurone i évaluée à Opi ,
Présenter l’ensemble des couples (entrée, sortie désirée)
Présenter le premier couple (entrée, sortie désirée) de l’ensemble.
ƒ(S) = 1/(1+e-s)
Opi =ƒ (Spi)Spi =∑ Wij. Opi
pi = ƒ’(Spi) ∑ pk * Wki δ pi = (tpi – Opi) ƒ’ (Spi)
∆p Wij = . pi. Opj
nEp (W) = ½ ∑ (tpi – Opi)
2
i=1
Tout l’ensemble des couples est présenté
Présenter un autre couple (entrée, sortie désirée)