Embed Size (px)
Citation preview

WIRTES 2007, Pisa
Open Research Issues in Real-Time Networks
Lucia Lo Bello
Dipartimento di Ingegneria Informatica e delle Telecomunicazioni
Università di Catania
RETISNET LAB
ResponsabileResponsabile :: Prof. Lucia Lo Bello
Progetti recenti e in corso:Progetti recenti e in corso:
�ARTIST2 Network of Excellence on “Embedded Systems Design” (IST FP6 Project)Cluster: Flexible Scheduling Technologies
� Instaurazione di una infrastruttura comune per sistemi real-timeadattativi
� Schedulazione stocastica nel sistemi real-time� Sistemi real-time distribuiti.

RETISNET LAB
Progetti Recenti e in corso:Progetti Recenti e in corso:
�Progetti in collaborazione con STMicroelectronics, Catania
Tecnologie wireless per specifiche applicazioni ind ustriali, domestiche e di home automation
�Progetto MIUR PRIN 04
“Studio e sviluppo di un sistema per il controllo e il monitoraggio in tempo reale del territorio per la prevenzione degli incendi”
Collaborazioni internazionali con:Collaborazioni internazionali con:
� Seoul National University (Corea del Sud)� Università di Oviedo (Spagna)� Università di Malardalen (Svezia)
Ricerca sulle reti real-time - Aree di interesse
Industrial communication
Supporto al traffico Real-time su reti wired e wirele ss:
� Shared, Switched Ethernet� IEEE 802.11x� Bluetooth� 802.15.4 (Zigbee)
in presenza di altri tipi di traffico
Wireless Sensor Networks
Ricerca di approcci per garantire un trade-off tra l atenza del traffico RT e consumo energetico dei nodi in WSN usa te per il monitoraggio di grandi aree
SupportoSupporto al al trafficotraffico RT RT susu retireti 802.11e802.11e
Ricerca sulle reti real-time
Supporto al traffico Real-Time su reti IEEE 802.11e
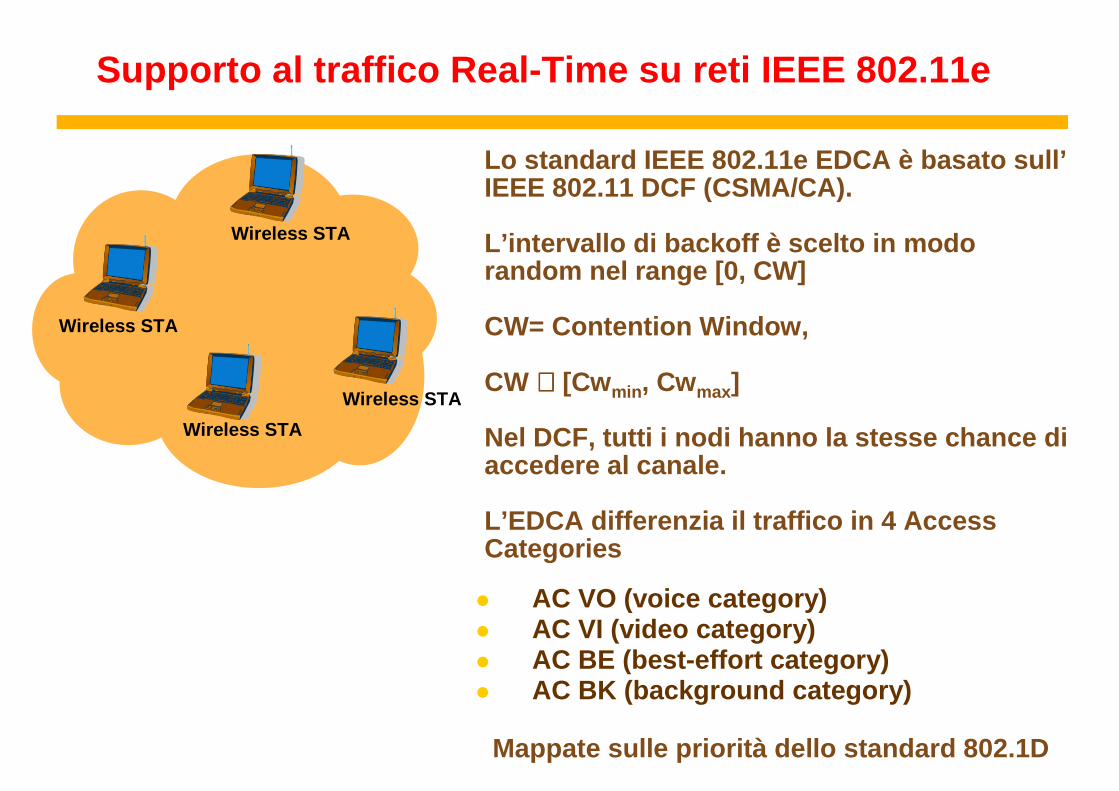
Lo standard IEEE 802.11e EDCA è basato sull’IEEE 802.11 DCF (CSMA/CA).
L’intervallo di backoff è scelto in modorandom nel range [0, CW]
CW= Contention Window,
CW ∈∈∈∈ [Cw min , Cwmax]
Nel DCF, tutti i nodi hanno la stesse chance diaccedere al canale.
L’EDCA differenzia il traffico in 4 Access Categories
Wireless STA
Wireless STA
Wireless STA
Wireless STA
� AC VO (voice category)� AC VI (video category)� AC BE (best-effort category)� AC BK (background category)
Mappate sulle priorità dello standard 802.1D
Limiti di EDCA e motivazione del CWA
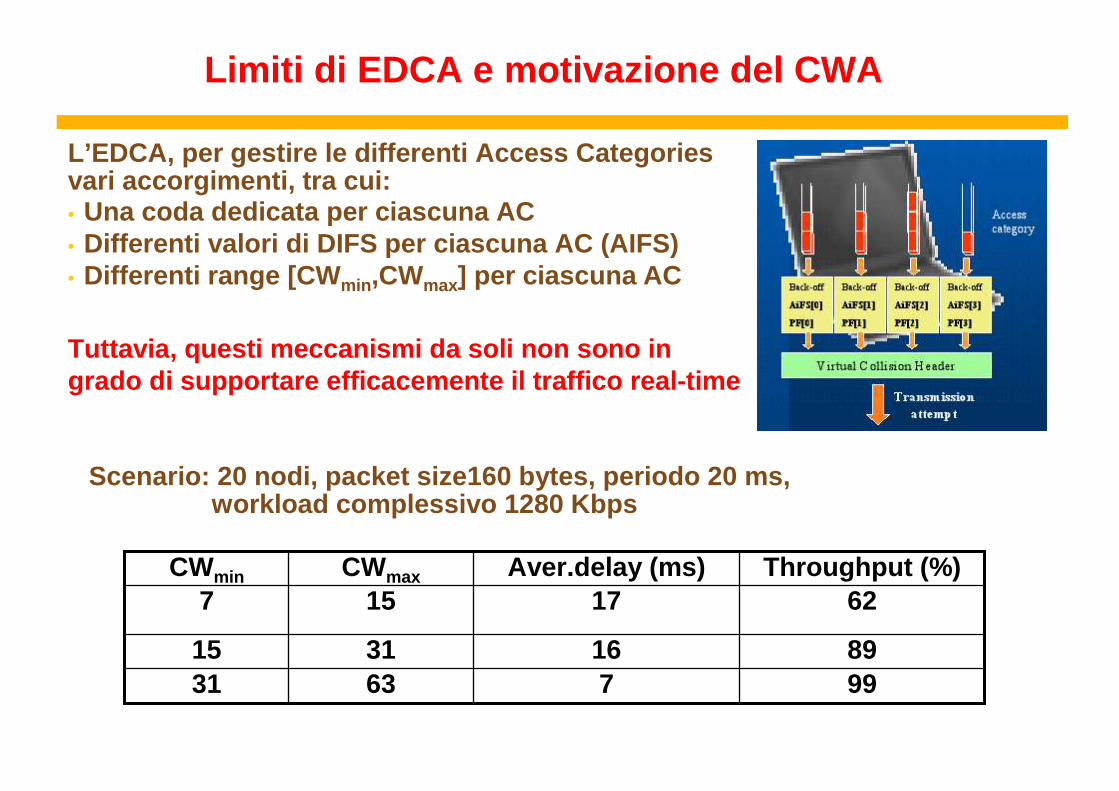
L’EDCA, per gestire le differenti Access Categories vari accorgimenti, tra cui:• Una coda dedicata per ciascuna AC• Differenti valori di DIFS per ciascuna AC (AIFS)• Differenti range [CW min ,CWmax] per ciascuna AC
Tuttavia, questi meccanismi da soli non sono in grado di supportare efficacemente il traffico real-time
997633189163115
6217157Throughput (%)Aver.delay (ms)CWmaxCWmin
Scenario: 20 nodi, packet size160 bytes, periodo 20 ms , workload complessivo 1280 Kbps
Limiti di EDCA e motivazione del CWA
Problema: Le performance RT dell’EDCA degradano rapidamente e in modosignificativo al variare del workload, anche in presenza d i solo traffico della classe a più alta priorità (AC_VO).
Causa: L’elevato numero di collisioni, poiché i valori CW min e CWmaxprevisti dallo standard forniscono un range molto limitato d ipossibili valori di backoff per i pacchetti nella classe AC_ VO
Soluzione: Consentire uno spettro più ampio di valori di backoffcosì da ridurre il numero di collisioni nella classe AC_VO.
CWA: Contention Window Adapter
CWA : adatta i valori di CWmin e CWmax per la classe AC_VO al carico di retecosì da ridurre il numero di collisioni all’interno di tale class e
Lo stato di carico di rete è stabilito attraverso il parametro rati o rc
indice del livello di congestione di rete visto dalla class e AC_VO.
Il CWA in funzione dei valori del parametro rc adatta il range [CWmin, CWmax] dellevarie classi
Per mantenere la differente QoS tra le varie AC, ad un incremento per CWmin e CWmaxnella classe AC_VO deve corrispondere un aumento a casca ta nei valori di CWmin e CWmax delle altre ACs.

Algoritmo CWA
Scelte euristicamente delle soglie valori α, β e γ,
If rc is in the [0, α] interval, CWmin and CWmax values are reduced;
If rc is in the ]α, β] interval CWmin and CWmax values are not changed;
If rc is in the ]β, γ] interval CWmin and CWmax values are increased;
If rc is greater than γCWmin and CWmax values are increased two times.
Aumento in cascata di Cwmin e Cwmax per mantenere le diffe renti QoS dellevarie AC
If {CWmin[AC_VO]=7, CWmax[AC_VO]=15} {CWmin[AC_VO]=15, CWmax[AC_VO]=31}
then{CWmin[AC_VI]=15, CWmax[AC_VI]=31} {CWmin[AC_VI]=31, CWmax[AC_VI]=63}
…
In caso di decremento si adotta un approccio simile.
CWA - Performance evaluation
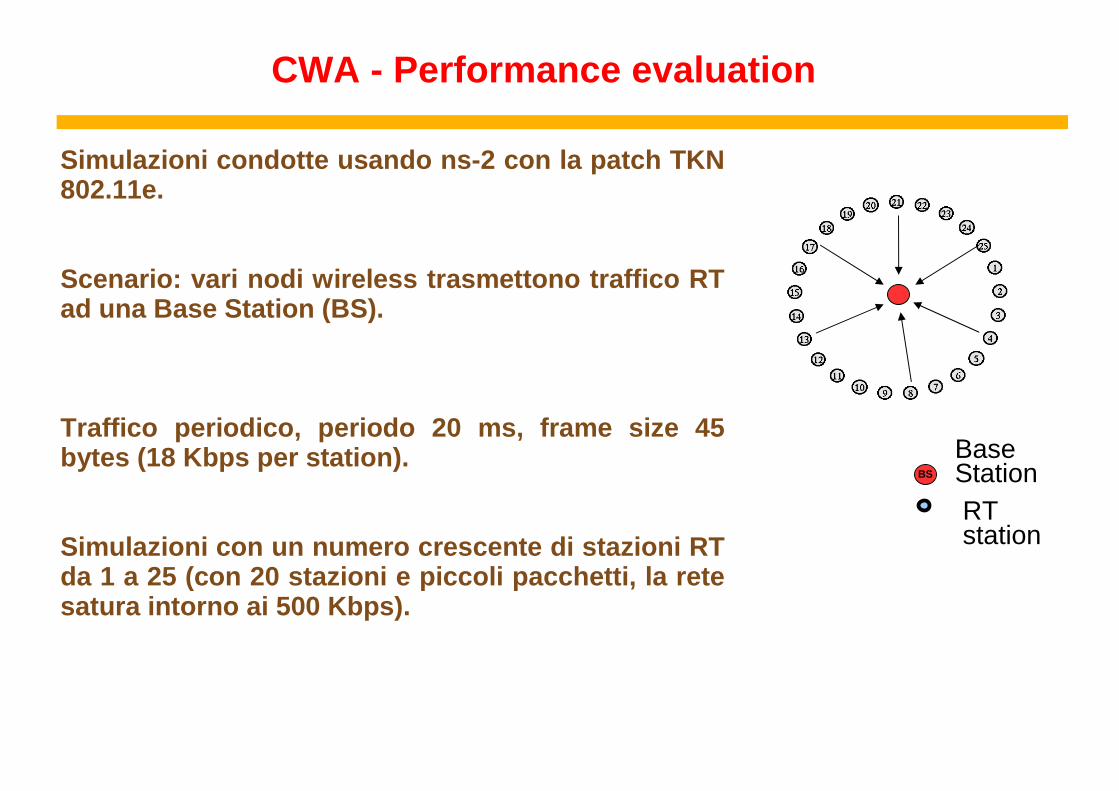
Simulazioni condotte usando ns-2 con la patch TKN 802.11e.
Scenario: vari nodi wireless trasmettono traffico RT ad una Base Station (BS).
Traffico periodico, periodo 20 ms, frame size 45 bytes (18 Kbps per station).
Simulazioni con un numero crescente di stazioni RT da 1 a 25 (con 20 stazioni e piccoli pacchetti, la retesatura intorno ai 500 Kbps).
BS
Base StationRT station
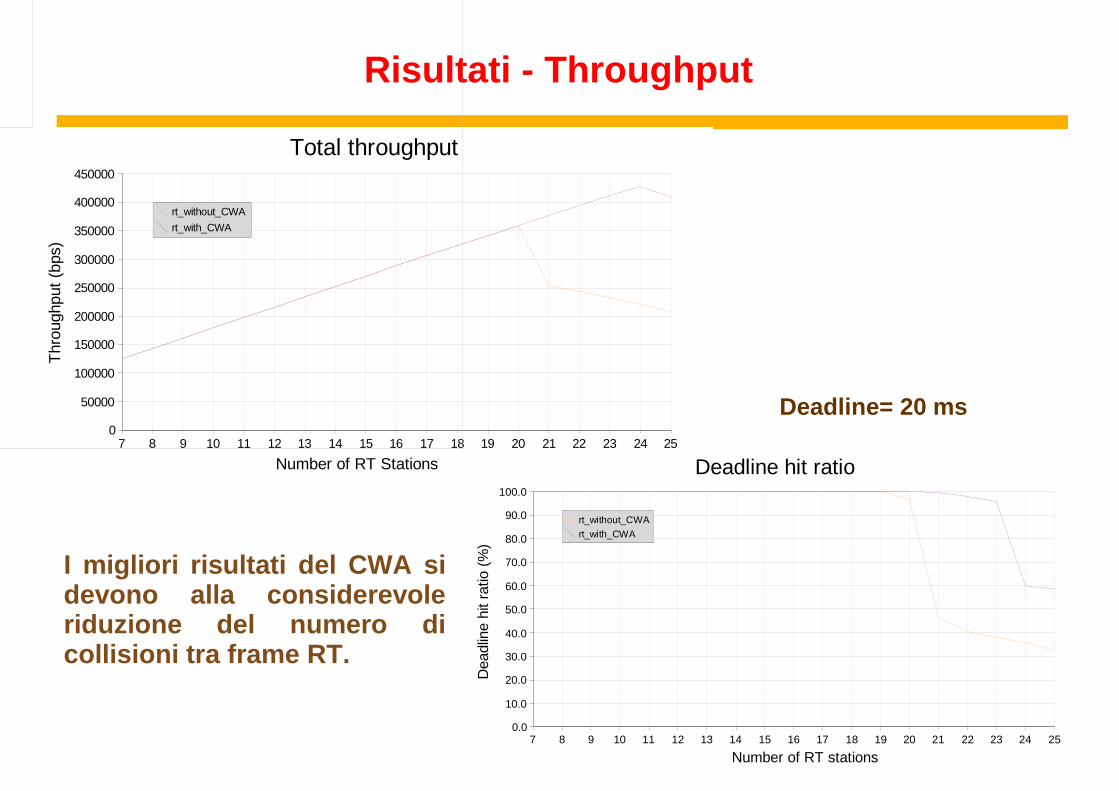
Risultati - Throughput
I migliori risultati del CWA sidevono alla considerevoleriduzione del numero dicollisioni tra frame RT.
7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 250
50000
100000
150000
200000
250000
300000
350000
400000
450000
Total throughput
rt_without_CWA
rt_with_CWA
Number of RT Stations
Thr
ough
put
(bps
)
7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 250.0
10.0
20.0
30.0
40.0
50.0
60.0
70.0
80.0
90.0
100.0
Deadline hit ratio
rt_without_CWA
rt_with_CWA
Number of RT stations
Dea
dlin
e hi
t rat
io (
%)
Deadline= 20 ms

Risultati - Collisioni
7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 250
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
Number of collisions
rt_without_CWA
rt_with_CWA
Number of RT stations
Num
ber
of C
ollis
ions
Con CWA si ha un significativo decremento del numero dicollisioni nella classe AC_VO .
Questo decremento, dovuto al CWA, determina il migliora menetodel thoughput e la riduzione del delay nella classe AC_ VO.

SupportoSupporto al al trafficotraffico RT RT susu retireti BluetoothBluetooth
Ricerca sulle reti real-time

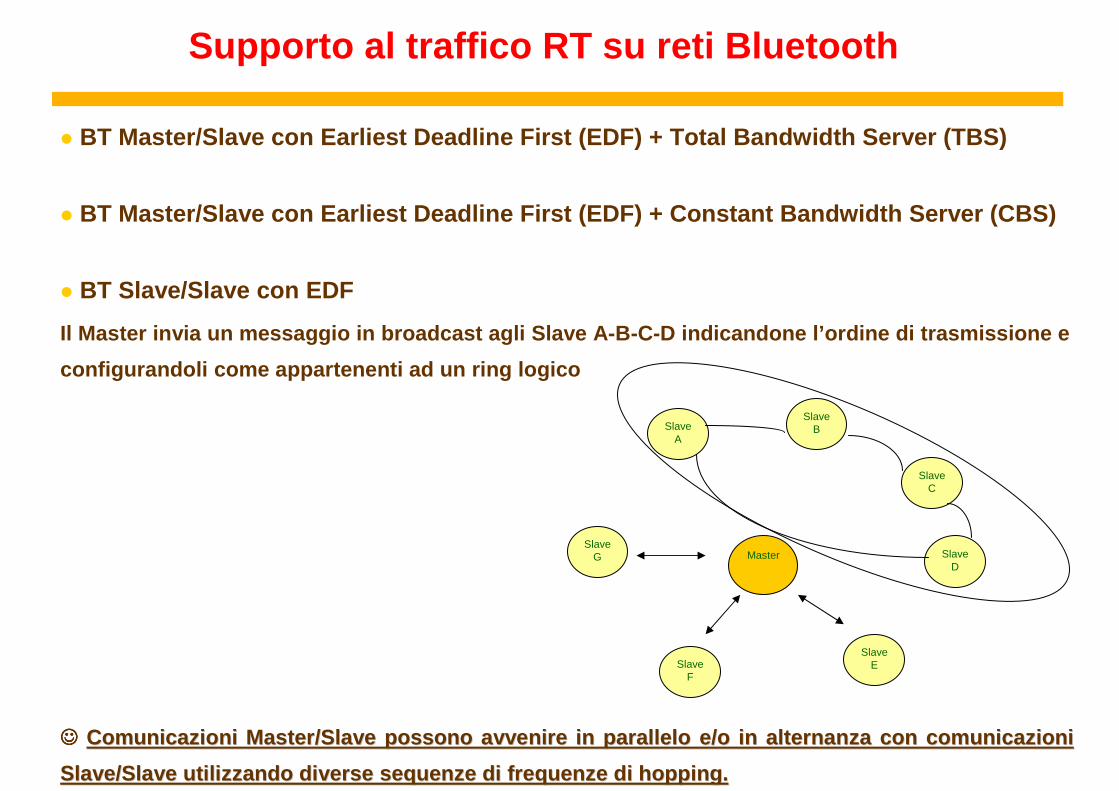
Supporto al traffico RT su reti Bluetooth
Standard Bluetooth : Master/Slave, con slot di polling del Master
�
Limitazioni
Schedulazione basata sul Round- Robin, quindi non in gra do di supportaretraffico real-time
Per soddisfare i vincoli real-time occorre introdurre una schedulazione che tenga esplicitamente conto delle deadline (deadline- aware).
M
S1
S7
S6 S5
S3
S4
S2
Piconet
Supporto al traffico RT su reti Bluetooth
� BT Master/Slave con Earliest Deadline First (EDF) + T otal Bandwidth Server (TBS)
� BT Master/Slave con Earliest Deadline First (EDF) + Co nstant Bandwidth Server (CBS)
� BT Slave/Slave con EDF
Il Master invia un messaggio in broadcast agli Slave A -B-C-D indicandone l’ordine di trasmissione e
configurandoli come appartenenti ad un ring logico
☺☺☺☺ ComunicazioniComunicazioni Master/Slave Master/Slave possonopossono avvenireavvenire in in paralleloparallelo e/oe/o in in alternanzaalternanza con con comunicazionicomunicazioni
Slave/Slave Slave/Slave utilizzandoutilizzando diverse diverse sequenzesequenze didi frequenzefrequenze didi hopping.hopping.
Master
Slave B
Slave D
Slave A
Slave C
Slave G
Slave ESlave
F

Master/Slave vs Slave/Slave
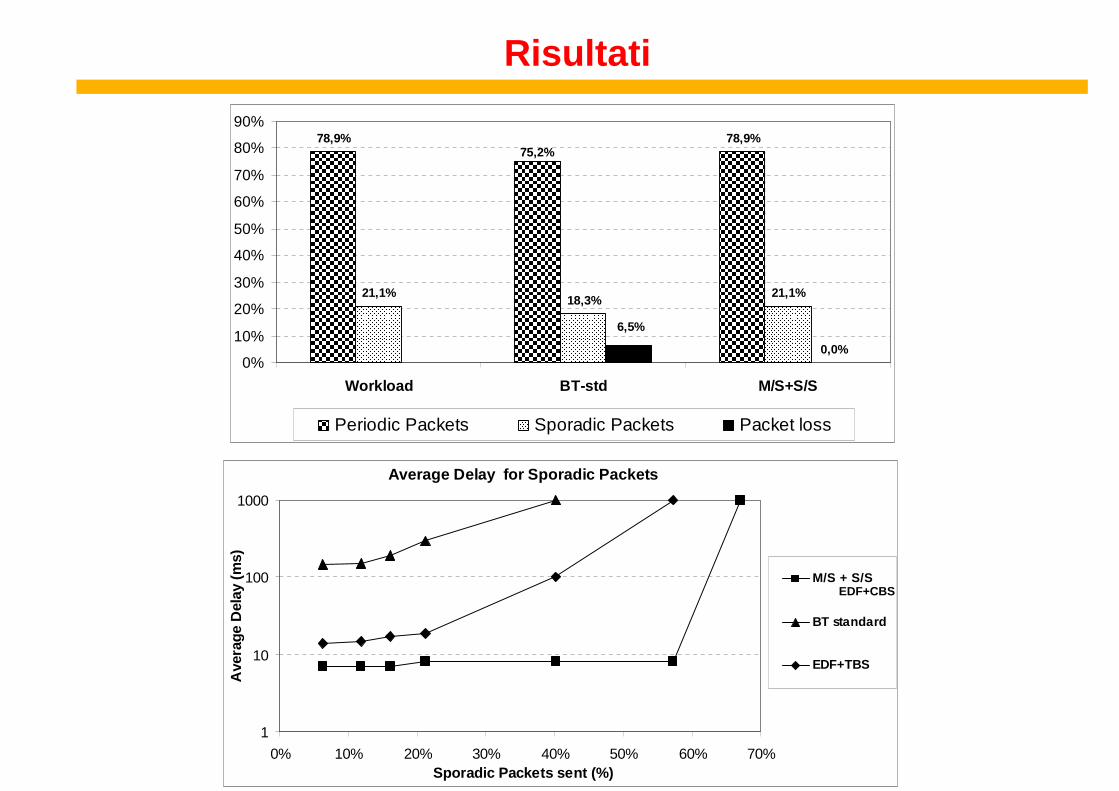
Risultati
78,9% 78,9%
21,1%18,3%
21,1%
0,0%
75,2%
6,5%
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
Workload BT-std M/S+S/S
Periodic Packets Sporadic Packets Packet loss
Average Delay for Sporadic Packets
1
10
100
1000
0% 10% 20% 30% 40% 50% 60% 70%Sporadic Packets sent (%)
Ave
rage
Del
ay (
ms)
M/S + S/S
BT standard
EDF+TBS
EDF+CBS
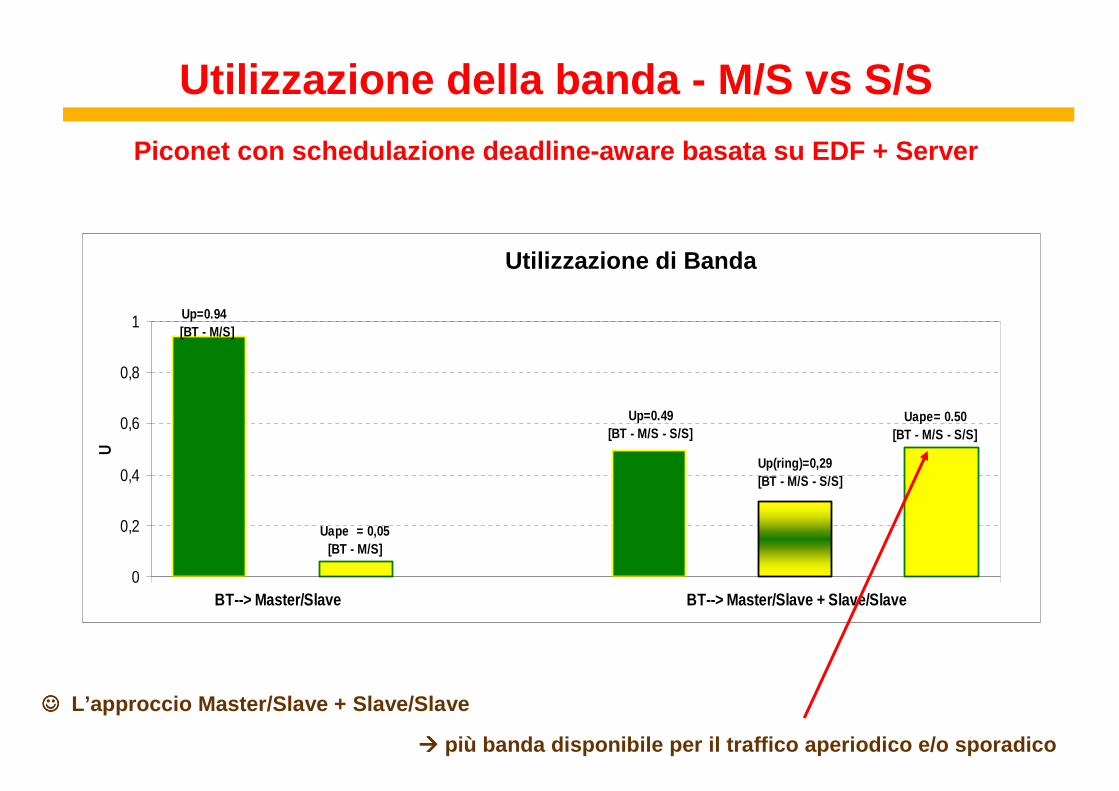
Utilizzazione della banda - M/S vs S/S
Piconet con schedulazione deadline-aware basata su ED F + Server
☺☺☺☺ L’approccio Master/Slave + Slave/Slave
���� più banda disponibile per il traffico aperiodico e/o spora dico
(U) -->Utilization band
Up=0.94 [BT - M/S]
Uape = 0,05[BT - M/S]
Up=0.49 [BT - M/S - S/S]
Up(ring)=0,29 [BT - M/S - S/S]
Uape= 0.50 [BT - M/S - S/S]
0
0,2
0,4
0,6
0,8
1
U
BT--> Master/Slave BT--> Master/Slave + Slave/Slave
Utilizzazione di Banda
SupportoSupporto al al trafficotraffico RT con RT con bassibassi consumiconsumi susu WSNWSN
Ricerca sulle reti real-time
Real-Time Power Aware Framework (RTPAW )
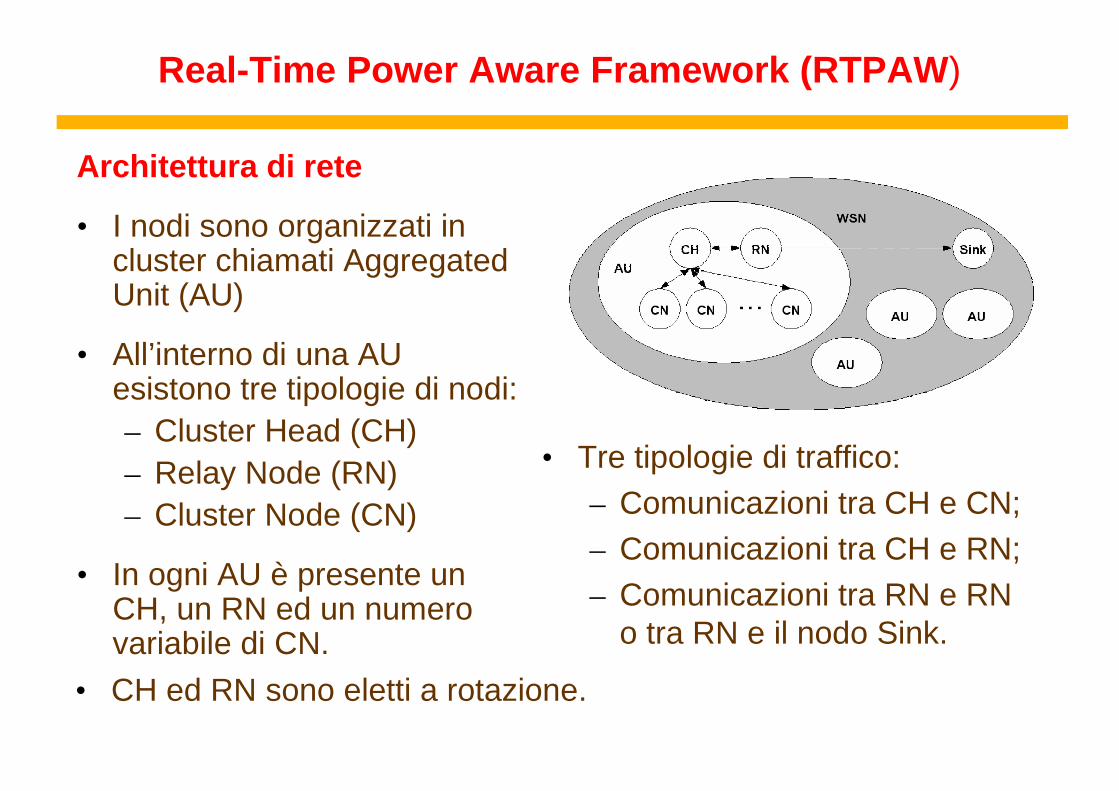
• Tre tipologie di traffico:– Comunicazioni tra CH e CN; – Comunicazioni tra CH e RN;– Comunicazioni tra RN e RN
o tra RN e il nodo Sink.
Architettura di rete
• I nodi sono organizzati in cluster chiamati AggregatedUnit (AU)
• All’interno di una AU esistono tre tipologie di nodi:– Cluster Head (CH) – Relay Node (RN)– Cluster Node (CN)
• In ogni AU è presente un CH, un RN ed un numero variabile di CN.
• CH ed RN sono eletti a rotazione.

RTPAW: Protocol Stack
MAC Layer
Aggregation Layer
Routing Layer
Physical Layer
Application Layer
Aggregation Layer
MAC Layer
Aggregation Layer
Routing Layer
Physical Layer
Application Layer
Aggregation Layer
Un nuovo livello è stato inserito nello stackprotocollare tra i livelli di MAC e di Routing
Aggregation Layer:– Fornisce al Routing
Layer una vista unitaria dell’insieme di nodi sensore che costituiscono la AU
– L’unità di indirizzamento per il Routing Layer non è il singolo nodo sensore, ma la singola AU.
PHY e MAC layer: IEEE 802.15.4:� Bassi costi e bassi consumi energetici;� Elevata diffusione dello standard.
Modalità non-beacon enabled� Non è il MAC layer ma l’Aggregation Layer a
gestire la schedulazione dei periodi di sleep.
Architettura radio di tipo cellulare
Aggregation Layer
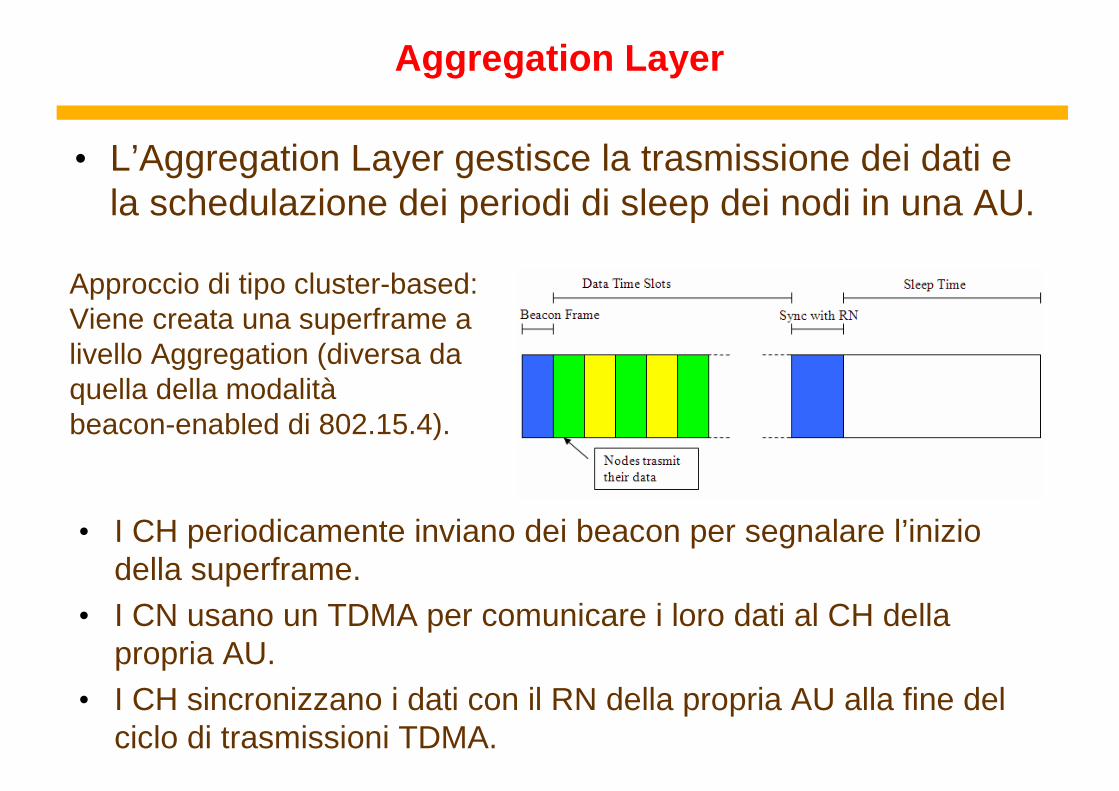
• L’Aggregation Layer gestisce la trasmissione dei dati e la schedulazione dei periodi di sleep dei nodi in una AU.
Approccio di tipo cluster-based:Viene creata una superframe a livello Aggregation (diversa da quella della modalitàbeacon-enabled di 802.15.4).
• I CH periodicamente inviano dei beacon per segnalare l’inizio della superframe.
• I CN usano un TDMA per comunicare i loro dati al CH della propria AU.
• I CH sincronizzano i dati con il RN della propria AU alla fine del ciclo di trasmissioni TDMA.
Routing Layer
Effettua il forwarding dei pacchetti dalla AU sorgente verso la loro destinazione ultima (il nodo Sink).
− In esecuzione esclusivamente sui RN.
Il protocollo di routing utilizzato attualmente si basa su SPEED, ma a differenza di questo:
− Il forwarding non coinvolge i singoli nodi ma le sin gole AU (tramite gli RN).
− Non vengono usate le coordinate reali del nodo, ma le coordinate nella griglia virtuale delle AU.
− Le trasmissioni hop-to-hop richiedono l’Ack
− Il delay per il singolo hop viene calcolato mediante la formula:
Delay=W q+(Tack-Ts)/2
− Dal momento che gli RN cambiano periodicamente, son o stati presi degli accorgimenti per mantenere la rete a regime anche d opo l’elezione di un nuovo RN.
Tool di simulazione:
− NS-2, v. 2.30
Scenario:
− Area da monitorare 100m x 100m
− 1500 nodi sensore organizzati in 100 AU
− Trasmissioni dati periodiche: periodo da 15s a 1s
− Network injection rate complessivo: da 100 packet/s a 1500 packet/s
− Setpoint speed: 1Km/s
Pametri prestazionali:
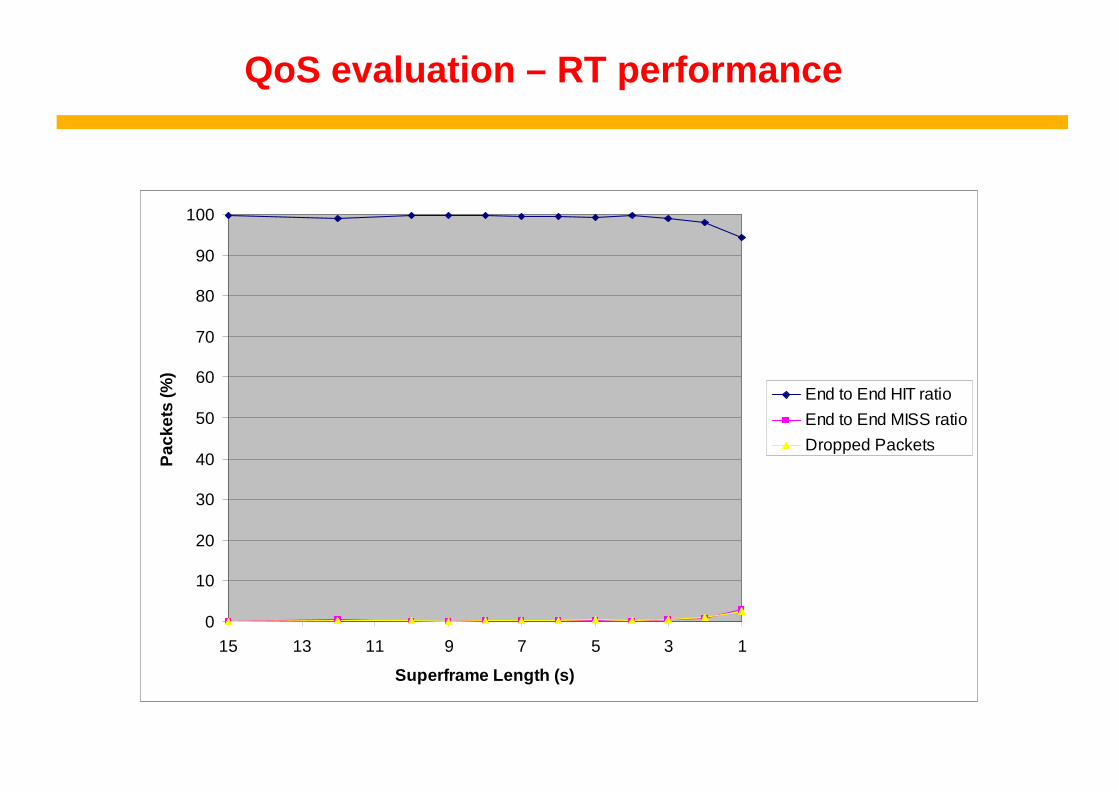
� Valutazione della QoS:
− Speed Hit ratio
� Valutazione dei consumi energetici:
− Consumo medio dei nodi all’interno di una AU
Simulation Results
0
10
20
30
40
50
60
70
80
90
100
13579111315
Superframe Length (s)
Pac
kets
(%)
End to End HIT ratio
End to End MISS ratio
Dropped Packets
QoS evaluation – RT performance
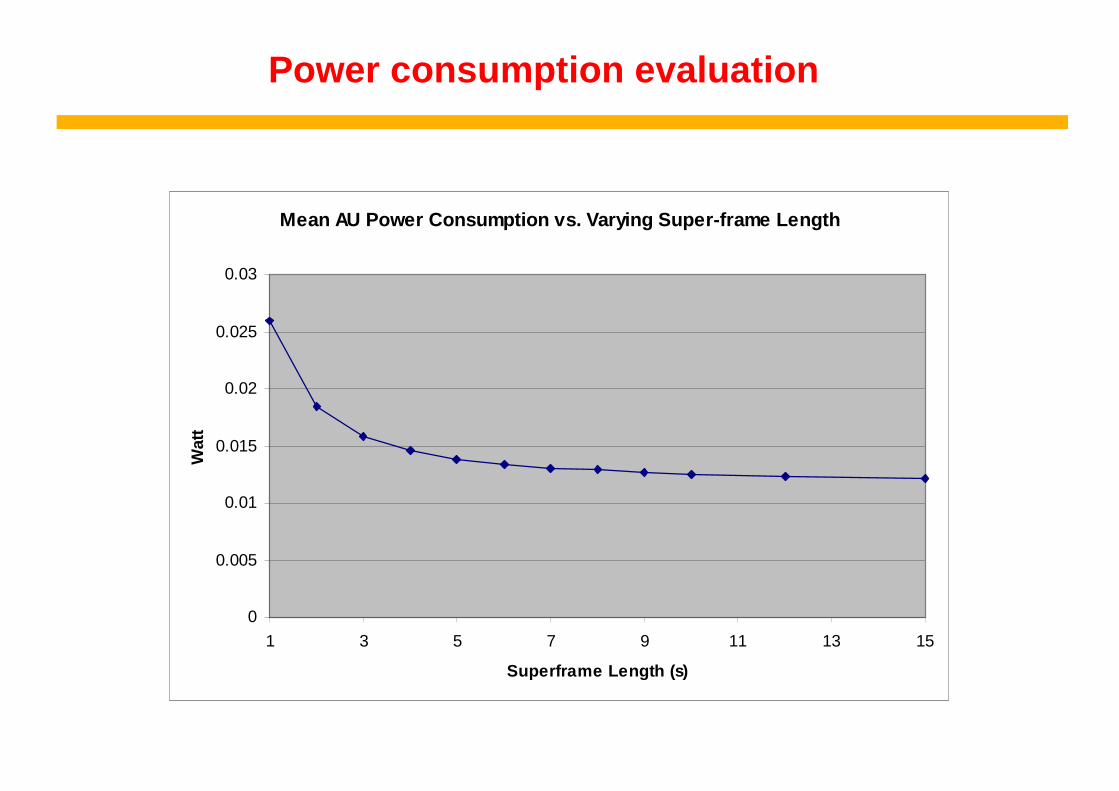
Power consumption evaluation
Mean AU Power Consumption vs. Varying Super-frame L ength
0
0.005
0.01
0.015
0.02
0.025
0.03
1 3 5 7 9 11 13 15
Superframe Length (s)
Wat
t

0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
Watt
Mean Power Consumption per AU
Consumo medio di un nododella WSN:
• Con RTPAW – Con una super-frame di 10s:
circa 12mW.
• Senza RTPAW– Con tempi di trasmissione e
ricezione rispettivamente del 10% e del 90% della vita del nodo: circa 163mW.
Power consumption evaluation
Attività in corso sulle reti real-time
� Implementazione del CWA su schede di rete COTS
� Supporto al traffico real-time su reti 802.15.4 attrave rsoschedulazione deadline aware
� Implementazione di RTPAW su moduli 802.15.4 COTS
� Valutazione della QoS offerta al traffico real-time su r eti802.16 (Wi-MAX)
� Architetture di reti two-tiered per applicazioni di tele controllo, telesorveglianza in cui Wi-MAX (livello 2) serve da infrastruttura per l’interconnessione di reti di li vello 1 (BT o 802.15.4).
Contatto: [email protected]
Grazie per Grazie per ll ’’attenzioneattenzione





























