Embed Size (px)
Citation preview

Electrical Power and Energy Systems 45 (2013) 293–302
Contents lists available at SciVerse ScienceDirect
Electrical Power and Energy Systems
journal homepage: www.elsevier .com/locate / i jepes
Making use of BDF-GMRES methods for solving short and long-term dynamicsin power systems
José E.O. Pessanha a,⇑, Alex A. Paz b, Ricardo Prada b, Carlos P. Poma c
a Power Quality Laboratory, Federal University of Maranhao, Avenida dos Portugueses s/n, Campus dos Bacanga, 65085-581 São Luís, MA, Brazilb Catholic University of Rio de Janeiro, PUC-Rio, Department of Electrical Engineering, Rua Marquês de São Vicente, 225, Gávea, 22453-900 Rio de Janeiro, RJ, Brazilc Federal University of Mato Grosso, Department of Electrical Engineering, Av. Fernando Corrêa da Costa, no. 2367, Bairro Boa Esperança, 78060-900 Cuiabá, MT, Brazil
a r t i c l e i n f o
Article history:Received 28 July 2010Received in revised form 21 August 2012Accepted 29 August 2012Available online 7 November 2012
Keywords:Short-term dynamicsLong-term dynamicsBDFGMRESPreconditionerNumerical integration
0142-0615/$ - see front matter � 2012 Elsevier Ltd. Ahttp://dx.doi.org/10.1016/j.ijepes.2012.08.065
⇑ Corresponding author. Tel.: +55 98 3301 9204; faE-mail addresses: [email protected] (J.E.O. Pe
(A.A. Paz), [email protected] (R. Prada), portugal.ce
a b s t r a c t
This paper applies the BDF-GMRES methods for solving the Differential Algebraic Equations (DAEs) asso-ciated to the simulation of short and long-term dynamics in power systems. The investigations are con-centrated on the construction of a fine ILU-GMRES preconditioner for solving efficiently not only the well-conditioned coefficient matrices but specially the ill-ones. It is shown that, if the image matrix (precon-ditioner origin) is firstly preprocessed (scaled, normalized and reordered), a high quality ILU precondi-tioner is achieved. Numerical experiments considering different test-systems and different operationconditions illustrate how tricky can be the simulation of power system dynamics if the Jacobian matrix(coefficient matrix) is ill-conditioned, normally associated to an adverse operation condition. It is shownthat a traditional implicit integration method may fail in this case, whereas the combination BDF-GMRESpresents an outstanding performance.
� 2012 Elsevier Ltd. All rights reserved.
1. Introduction
The solution of large sparse linear systems of type Ax = b is cen-tral to many power systems simulations for both steady state andtime domain analyses and it is frequently the most time-consum-ing part of the computation. Normally, these linear systems aresolved by a direct method, such as Gaussian elimination or LU fac-torization, with some sparsity strategy and despite their robust-ness, they tend to have need of a predictable amount ofresources in terms of computational time and storage, or even failfor an ill-conditioned and/or a very large coefficient matrix [1,2].However, in the last two decades, the power system industry hasdevoted attention to Krylov subspace preconditioned iterativemethods for solving such linear systems.
A literature review on iterative methods and power systemsproblems revealed a majority of steady-state studies [3–15]. De-spite time domain simulation be an important tool for dynamicassessment of power systems [16–18], the application of iterativemethods have been focused only on the solution of short-termphenomena (transient stability) through implicit integration meth-ods with fixed step sizes, taking advantage of parallel or distrib-uted computing [3,4,13,14]. Besides, the reasons for the lower
ll rights reserved.
x: +55 98 3301 8243.ssanha), [email protected]@gmail.com (C.P. Poma).
number of references related to time-domain analyses may beassociated to the high computational cost when solving complexDifferential Algebraic Equations (DAEs) due to the slow ornon-convergence presented by earlier unpreconditioned iterativemethods, or even by the use of low quality preconditioners.
Based on the above, one can identify two major problemsassociated to the solution in time-domain of large and/or very ill-conditioned linear systems using iterative methods. Firstly, solvingDAEs by implicit integration methods with fixed step sizes issuitable only to short-term phenomena. Secondly, a low qualitypreconditioner reduces the iterative method convergence rate,increases the computational cost, and may even cause the methodto fail, so that a solution cannot be found. In order to overcome thefirst problem, this paper is considering the use of a variable stepsize and variable order Backward Differentiation Formula (BDF)[19] to capture both short- and long-term phenomena. For thesecond problem, it is being proposed a high quality preconditionerconstructed from the original power system Jacobian matrix(image matrix). It is shown that the quality of the preconditioneris improved if the image matrix is preprocessed through scaling,normalizing and reordering. The preconditioned GeneralizedMinimum Residual (GMRES) method [20] is applied for thesolution of the linear systems and the choice is based on itsadequacy for the problem since the power system Jacobian matrix(coefficient matrix) including dynamic devices is block-diagonal,highly sparse, non-symmetric and indefinite [9].

294 J.E.O. Pessanha et al. / Electrical Power and Energy Systems 45 (2013) 293–302
Sets of numerical experiments performed in a Notebook Intelcore 2 – 2.00 GHz; 1 GB – RAM using different power system mod-els and operation conditions as well show that a high quality pre-conditioner is the key for a robust and efficient iterativeperformance. The implicit trapezoidal integration with directmethod (LU factorization with sparse systems of symmetricalmatrices) was considered for comparison purposes.
2. DAE solution in dynamic problems: a brief historical
Variable step size integration methods were firstly presented by[21], but comments in power systems applications only quite a fewyears after [22]. Since then, these classes of methods have beenimplemented in many computer programs, although in differentmanners [23]. This former reference also provides interesting andimportant insights about earlier numerical algorithms imple-mented in different computer programs used by power systemutilities around the world, such as a variable step size trapezoidalintegration method based on an estimated local error computed onthe rotor angle of all generators [24]; or the application of BDF asan integration method for the differential variables and the Adamsmethod if the variable is non-stiff [25]. It is also proposed in [23]the mixed Adams-BDF variable step size and variable order methodfor short and long-term dynamics. The Adams method is applied tothe differential state variables and the BDF to the algebraic statevariables.
Another computer code uses a variable step size and variableorder integration algorithm and the simultaneous solution of alge-braic and differential equations [26–28]. These algorithms are suit-able for efficient simulation of short and long-term dynamics,using a combination of Linear Multistep integration methods ofAdams–Bashforth–Moulton and BDF formulae. The methods areimplemented with variable step and variable order (1 or 2). Usuallythe time step varies from 0.001 to 40 s.
Part of the above algorithms applies, in general, a direct methodwith some sparsity technique for solving the resulting linear sys-tem. The present work comes out with a new proposal, which isthe application of BDF-GMRES for solving the differential algebraicequations associated to short and long-term phenomena.
3. Problem’s formulation
As state above, BDF methods have been originally introduced tothe scientific community by [21] and have been considered in dif-ferent computing applications since then. Because of the effortwhen computing and accepting the new step size and method or-der is normally large, and/or to increase stability robustness, differ-ent versions have emerged [23,27,29]. The present paper does notchange the main BDF characteristics, except that the version variesthe step size and the order of the method through a fixed leadingcoefficient strategy and the resulting linear system arising at eachtime step is solved iteratively (GMRES). In this section, the mainsteps associated to the mathematical problem’s formulation aredescribed.
3.1. The BDF method
The equipment models and control devices considered in time-domain analysis can be represented by a set of algebraic differen-tial equations given by:
Fðt; y; y0Þ ¼ 0 yðt0Þ ¼ y0 y0ðt0Þ ¼ y00 ð1Þ
where F, y, and y0 are n-dimensional vectors, y representing thestate variables associated to the synchronous machines, controlsand other dynamic devices; stator and network algebraic variables.
Vector y0 represents the derivatives and t the independent variable.The derivative of (1) is approximated by differences using backwarddifferentiation formulae with a variable step size and variable orderthrough a fixed leading coefficient strategy at every k-iteration andthe resulting system (2) is solved by a Newton method at each timeinterval according to (3) [30].
F tn; yn;yn � yn�1
hn
� �¼ 0; hn ¼ tn � tn�1 ð2Þ
ykþ1n ¼ yk
n �1hn
@F@y0þ @F@y
� ��1
|fflfflfflfflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflfflfflfflffl}A
� F tn; ykn;
ykn � yn�1
hn
� �ð3Þ
The changing of step size and order is based on the truncationand polynomial interpolation errors, with the most previous inter-vals step size and method order kept fixed until reach convergencein order to initiate another selection [19]. Refs. [23–27] restrict theorder of the method up to 2 due to numerical stability issues. In thepresent work the order is free to vary up to 5 because no instabilityproblems have been detected.
If the simulation includes a large port power system with hun-dreds of generators and dynamic devices, the cost to compute andfactorize matrix A (3) dominates the integration process. In thepresent paper, this sublinear problem represented in (4)–(6) issolved at each Newton iteration using the GMRES method, whereA is the n � n system Jacobian matrix; x and b n-dimensional vec-tors. The a parameter is associated to the integration step or to theorder of the method, and b is a vector which depends on the solu-tion of previous intervals.
Ax ¼ b ð4Þx ¼ ykþ1 � yk ð5Þb ¼ �Fðt; yk;ayk þ bÞ ð6Þ
3.2. The Generalized Minimal Residual Method – GMRES
The Generalized Minimum Residual method, or simply GMRES,was firstly introduced by [20] for solving nonsymmetric linear sys-tems. The GMRES is a generalization of the MINRES method,approximating the exact solution of Ax = b by the vector xn 2 Kn
(nth Krylov subspace) that minimizes the Euclidean norm of theresidual Axn � b. The goal is to find a vector xn (good approximationto the exact solution) after a suitable number of iterations.
The Arnoldi iteration is used to find orthonormal vectors(q1,q2, . . . ,qn) which form a basis for Kn. The vector xn 2 Kn can bewritten as xn = Qnyn with yn 2 Rn, where Qn is the mn matrix formedby q1, . . ., ,qn. The Arnoldi process forms an (n + 1)n upperHessenberg matrix ðeHnÞ and since Qn is orthogonal, the norm ofthe residual can be given by Eq. (7), where e1 = (1,0,0, . . . ,0) isthe first vector in the standard basis of Rn+1, and b = kb � Ax0k.The initial guess (x0) is normally zero, and xn is found byminimizing the Euclidean norm of the residual (8), resulting in alinear least squares problem of size n.
kAxn � bk ¼ kfHn yn � be1k ð7Þ
rn ¼ fHn yn � be1 ð8Þ
The major disadvantage associated to GMRES is that the amountof work and storage required per iteration grows linearly with theiteration count and the cost will become excessive rapidly. Theusual way to overcome this problem is by restarting the iteration.After select a number of iterations m, the accumulated data arecleared and the intermediate results are used as the initial datafor the next m iterations. This procedure is repeated untilconvergence is obtained. However, choosing an appropriate value

−400 −300 −200 −100 0 100−600
−400
−200
0
200
400
600
REAL
IMA
G
−400 −300 −200 −100 0 100−600
−400
−200
0
200
400
600
REAL
IMA
G
−1.5 −1 −0.5 0 0.5−4
−2
0
2
4
−400 −300 −200 −100 0 100−600
−400
−200
0
200
400
600
REAL
IMA
G
−2 −1 0 1−2
0
2
Fig. 1. Jacobian matrix eigenvalues spectral distribution (Experiment II).
−300 −200 −100 0 100 200 300−1500
−1000
−500
0
500
1000
1500
REAL
IMA
G
−300 −200 −100 0 100 200 300−1500
−1000
−500
0
500
1000
1500
REAL
IMA
G
−2 0 2 4−10
0
10
−300 −200 −100 0 100 200 300−1500
−1000
−500
0
500
1000
1500
REAL
IMA
G
−2 0 2−2
−1
0
1
2
Fig. 2. Jacobian matrix eigenvalues spectral distribution (Experiment III).
J.E.O. Pessanha et al. / Electrical Power and Energy Systems 45 (2013) 293–302 295
for m is not a straightforward task because if m is very small, theiterative process associated to GMRES-m may be slow to converge,or fail to converge completely. On the other hand if m is larger thannecessary, too much memory storage will be required. There are nospecific rules to select m, therefore choosing the appropriate timeto restart is a matter of practice. Therefore, the key for successfulapplication of GMRES-m falls over the decision of when to restart.If restarts strategies are not considered, GMRES will converge in nomore than n steps and this is unpractical for a large n; furthermore,the storage and computational requirements in the absence of re-starts are excessive. Cases are found for which the method declinesand convergence takes place only at the nth step. For these casesany choice of m less than n fails to converge [31].
3.2.1. Experiment IThe performance of the unpreconditioned GMRES-m is firstly
evaluated using the IEEE 118-bus test system comprising 54 gener-ators with voltage regulators and power system stabilizers as well.
One made partial use of the solver DASPK2.0 (public domain) in allexperiments [32]. It is presented in Appendix A the group of differ-ential equations implemented in the solver representing the syn-chronous machines models and respective control devices, andthe algebraic equations representing the network. It is assumedthat the stator/network electromagnetic transients have beeneliminated, leading to algebraic equations that accompany themultimachine dynamic model. Besides, the stator/network electro-magnetic transients are very fast in comparison with the dynamicphenomena under investigation.
The simulation reproduced a sequence of events considering themost severe under voltage sag point of view – opening of fivetransmission lines at 0.005 s, 60 s, 200 s, 300 s and 370 s. TheCPU time increased largely and the simulation was interrupted be-fore the second line opening, at 60 s, even for different values of m(10–100). On the other hand, the trapezoidal method with LU fac-torization solved the problem with a CPU time of 1 min and 27 s.
The non-convergence occurred due to a phenomenon related tothe GMRES-m iterative process known as stagnation, normally

296 J.E.O. Pessanha et al. / Electrical Power and Energy Systems 45 (2013) 293–302
when the matrix is not positive definite. This problem can be over-come modifying the original linear system through a transforma-tion, or preconditioner matrix M, as seen in (9) [30,31,33].
ðM�1AÞ|fflfflfflffl{zfflfflfflffl}A
x ¼ M�1b|fflffl{zfflffl}�b
ð9Þ
4. Preconditioning
Iterative methods have gained attention with the advances inpreconditioning techniques, since the speed of convergence raisessubstantially, even in serial computing. The preconditioner consid-ered is based on incomplete triangular factors (ILU) taking thepower system Jacobian matrix calculated in the first Newton iter-ation as its image. The nonzero elements are dropped accordingto a relative tolerance si obtained by multiplying a threshold sby the original norm of the ith row. This preconditioner was devel-oped by [34] and it is known as ILUT (q,s), where T stands forthreshold, with an additional rule for keeping only the q largestelements in L and U parts of the row. According to [35], this pre-conditioner is quite powerful. If it fails on a problem for a givenchoice of the parameters s and q, it will often succeed by takinga smaller value of s and/or a larger value of s. A disadvantage ofthis preconditioner is that it is difficult to choose a good value ofthe drop tolerance: usually, this is done by trial-and-error for afew sample matrices from a given application, until a satisfactoryvalue of is found. In many cases, good results are obtained for val-ues of s in the range 10E-04-10E-02, but the optimal value isstrongly problem dependent [35].
One must note that if the coefficient matrix is extremelyunstructured, nonsymmetric (structurally and/or numerically),
Fig. 3. Generator’s (pe
and indefinite – eigenvalues that have both positive and negativereal parts, incomplete factorization preconditioners habitually fail[35]. Furthermore, even taken pivots from the diagonal and drop-ping the nonzero element according to a criterion rule turningthe resulting factors more economical to store, to compute, andto solve, incomplete factorization preconditioners can behavepoorly since very small pivots can lead to very large incompletefactors entries (or even fail if zero), resulting in unstable and inac-curate factorization. An inaccurate factorization can also occur inthe absence of small pivots, when many (especially large) fill-insare dropped from the incomplete factors and also due to severeill-conditioning of the triangular factors. This is also a common sit-uation when the coefficient matrix is far from diagonally dominantbut fortunately instabilities and inaccuracies in the preconditionerconstruction and application can frequently be avoided by fullypreprocessing the coefficient matrix aimed at improving the condi-tioning, diagonal dominance, and structure of the coefficient ma-trix [35–38].
Since the ILU preconditioner considered here uses the powersystem Jacobian matrix as image, one must work over its condi-tioning to improve the resulting preconditioner quality, and thisis done by preprocessing the Jacobian matrix through scaling,Euclidian normalization and reordering prior to the preconditionerconstruction. To avoid an unacceptable computational cost, thepreconditioner is kept fixed as long as possible, and a new one isconstructed only if the truncation error associated to the integra-tion step-size exceeds a threshold.
5. Improving the preconditioner quality
The previous section introduced some undesirable coefficientmatrix properties which may lead to unstable and inaccurate
rturbed) voltages.

10−5 100 105 1010−3
−2
−1
0
1
2
3 x 104
REAL
IMA
G
10−5 100 105 1010−1500
−1000
−500
0
500
1000
1500
REAL
IMA
G
10−5
100
105
1010
−1500
−1000
−500
0
500
1000
1500
REAL
IMA
G
−2 0 2−2
0
2
Fig. 4. Jacobian matrix eigenvalues spectral distribution (Experiment IV).
J.E.O. Pessanha et al. / Electrical Power and Energy Systems 45 (2013) 293–302 297
incomplete triangular preconditioners and also numerical strate-gies to attenuate these unwanted effects. Since a power systemJacobian matrix (10) is not free of some of these properties, caremust be taken concerning to the characteristics of the original Jaco-bian matrix since in our case it is the preconditioner’s image. Thematrix elements may vary greatly in magnitude, and in this casethe DAE problem requires the inclusion scale factors, so that allthe vectors norms become weighted norms in the problem vari-ables. The scale factors are based on errors tolerance (absoluteand relative) to be imposed to the computed solution [30]. In(10), y1 is the vector of state variables; y2 is the vector of algebraicvariables and h the integration step size.
JSD ¼1h ½I� þ
@F1@y1
@F1@y2
@F2@y1
@F2@y2
" #ð10Þ
Even scaled iterative methods appear to be competitive onlyfor a quite narrow class of problems, namely ordinary differentialequations characterized mainly by tight clustering in thespectrum of the Jacobian matrix. Thus, for robustness, it is essen-tial to enhance the methods further [30]. Therefore, two otherstrategies are considered in the preprocessing stage; Euclidiannormalization and reordering. The first one reduces even furtherthe eigenvalues magnitudes, but for some cases it may not benecessary. Here, the Reverse Cuthill–Mckee reordering scheme[39] is used to reduce fill-in, to improve the stability of theincomplete factorization and the rate of convergence of theGMRES [35].
5.1. Experiment II
The previous experiment is repeated but now considering theILUT (0.05,100) and starting with GMRES-10. The choice of m(GMRES restart), s and q are based on several load-flowsimulations considering a specific operation condition (heavyload). The CPU time was taken as a criterion for decision (the lowerthe better), but a simple programming loop made this searchinexpensive.
Fig. 1a shows the natural ordering Jacobian matrix eigenvaluesspectral distribution attesting its ill-conditioning (scattered eigen-values), justifying the non convergence of the previous experiment.As the matrix is preprocessed, the eigenvalues spectral distributionbecomes tightly clustered as shown in Fig. 1b and c, improving thepreconditioner quality and the iterative process as well. The prob-lem was solved with a CPU time of 56 s. However, one can note theslight effect resulting from normalization since not much could bedone concerning to the eigenvalues magnitudes.
Another interesting situation is concerned to the value of msince it was observed in [40] that a finest value for m to achieveoptimal performance, or even to ensure convergence, is not di-rectly related to the size of the system. For a small 233-bus system,it recommended m to be greater than 50 to ensure convergence. Onthe other hand, for a 685-bus system, the condition m P 10 is rea-sonable. The present experiment does not confirm that, sincem = 10 ensured convergence for a 118-bus system and the short-comings associated to a bad choice for m were not observed. ThisGMRES performance was achieved due to the high quality of thepreconditioner.
5.2. Experiment III
The power system operation condition considered above hasbeen stressed and corresponds to a maximum loading obtainedfrom a continuing power flow. The disturbance consisted in onegenerator voltage regulator set point step down of 1% at t = 30 s.Fig. 2a shows the Jacobian matrix eigenvalues spectral distribution
where one can see, as expected, that its conditioning is even worsethan the previous one. This means that the iterative solution of thelinear system is even more difficult. However, the Jacobian matrixproperties are improved substantially if preprocessed, as seen inFig. 2b and c. Here, the normalization effect is more evident thanthat of the previous experiment.
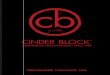
The curves illustrated in Fig. 3 are related to the generator’s ter-minal and field voltages responses, where the black solid line be-longs to trapezoidal solution and the gray to the BDF-GMRES.Even before the perturbation, the trapezoidal response is oscilla-tory and the simulation is interrupted not reaching 30 s, whenthe voltage set point reduction is applied. Different step sizes wereconsidered, but all failed and the reasons for that may not be re-lated to the direct method. This statement is based on the fact thatthe problem was solved replacing the GMRES method by LU factor-ization with minimum degree reordering [41,42]. The combinationBDF-GMRES solved the problem in a smaller CPU time than BDF-LU, 12.75 s and 34.75 s, respectively.

Table 1Jacobian matrix conditioning number and CPU time.
Experiment Original Scaled Normalized BDF-GMRES
Trapezoidal-LU
I 8.64E+06 – – Fail 1 min 27 sII 8.64E+06 2.15E+06 8.37E+03 56.0 s 1 min 27 sIII 1.27E+07 2.94E+06 2.41E+04 12.7 s FailIV 2.00E+16 1.85E+14 3.61E+07 28.6 s 38.4 s
298 J.E.O. Pessanha et al. / Electrical Power and Energy Systems 45 (2013) 293–302
5.3. Experiment IV
The previous experiments used a hypothetical power systemmodel. Now, it is real and corresponds to the North/Northeast sub-systems of the Brazilian Interconnected bulk power system operat-ing under heavy load condition, comprising 564 buses, 831 linesand 56 generators, including power system stabilizers, automaticvoltage regulators and overexcitation limiters. The DAEs represent-ing this power system are also based on those presented in Appen-dix A. The ILUT (10�6,150)-GMRES-10 is considered and theparameters were found based on the same strategy presented be-fore. The simulation consisted of several synchronous machinesoutages (11 generators + 1 synchronous compensator) and respec-tive control devices of the main power plants. Therefore, short andlong-term dynamics are taking into account not only as function ofthe outages, but also due to the responses of the remaining controldevices. Note that the ill conditioning of the original Jacobian ma-trix is characterized by its eigenvalues scattering, as shown in
0 50 100 150 2000
10
20
30
40
50
t (s)
CPU
(s)
BDF k 5BDF k 2
0 50 100 150 2000
10
20
30
40
50
60
70
t (s)
GM
RES
− Li
near
Iter
atio
ns
0 50 100 150 2000
1
2
3
t (s)
h (s
)
Fig. 5. Mathematical variables.
Fig. 4a. Despite scaling and reordering, there are still high eigen-values as can be seen in Fig. 4b, but now, Euclidian normalizationreduced them even further, as shown in Fig. 4c.
Fig. 5a illustrates the CPU time spent for different BDF orders;k = 2 (48.52 s) and k = 5 (28.63 s). As can be seen, limiting the orderup to 5 resulted in a much smaller CPU time and no numerical sta-bility issues have been observed. This outstanding behavior waspartially obtained thanks to the fixed leading coefficient strategy,which is a compromise between the fixed and variable coefficientapproaches [19]. Fig. 5b gives the GMRES total iteration number ateach time interval and Fig. 5c the step size behavior along the sim-ulation. At each generator outage (0.05 s, 20 s, 30 s, and 60 s), thestep size is drastically reduced while the iteration number in-creases. A very small step size modifies the most upper left blockof (10) degrading the eigenvalues clustering, justifying the con-struction of a new preconditioner and the large number (total) oflinear iterations. One can observe an unexpected disturbance att � 124 s caused by a specific overexcitation limiter reaching itslimit. The problem was solved by the BDF-GMRES with a 28.63 sCPU time and 38.4 s by the trapezoidal method.
5.4. Jacobian matrix conditioning number
Table 1 presents the Jacobian matrix condition number associ-ated to each numerical experiment and the respective CPU time.The reordering is not shown because this strategy does not modifythe magnitude of the matrix elements. A high condition number, asseen for each original Jacobian matrix and especially for that asso-ciated to Experiment IV, generally indicates that the matrix is al-most singular. In this case, the quality of the resulting ILUpreconditioner is low, affecting the robustness (ability in solvingill-conditioned linear systems) and efficiency (suitable computa-tional cost) of the iterative process negatively. Besides, investiga-tions performed by the authors (summarized in Appendix B)taking into account different power systems and different operationconditions as well, have shown that the original Jacobian matriceswere ill-conditioned even for light/normal loading. Therefore, it isappropriate to consider preprocessing strategies over the imagematrix when using ILU preconditioning for solving any type of lin-ear systems by GMRES in power systems time domain analysis.
6. Conclusion
As power systems grow not only in terms of dimension andcomplexity, but also in terms of transmission lines loading, thesolution of the resulting mathematical systems through traditionalnumerical methods is now facing difficulties not seen before, justi-fying the need for more robust and efficient alternatives. This is themain issue of the present paper focusing on the solution of DAEssystems for time domain analysis, with special interest in ill-condi-tioned Jacobian matrices. Despite the existing algorithms (some ofthem mentioned in the text), one can note the innovative aspect ofthe present paper which is the application of GMRES for solvinglinear equations associated to the BDF method. To reproduce shortand long-term power systems dynamics, including operation con-ditions close to instability, we took advantages of special charac-teristics of each method, as the ability of BDF with fixed leading

Table A.2Synchronous machines and control devices.
d – Machine angle d–q – Direct and quadrature axisx – Angular speed T 0d0, T 00d0 – Transient and subtransient open
circuit direct-axis time constantH – Inertia constant Efd, Ifd – Field voltage and field currentPM – Input mechanical power K – GainE0 , E00 – Transient and
subtransient internalvoltage
VT – Terminal voltage
V, I – Voltage and current T – Time constantD – Damping factor Vref – Reference (setpoint) voltageL – Inductance Sat – Saturation
Table A.3Electrical network.
Vi, Vk – Voltage at bus i and at bus kPLi and QLi – Active and reactive load at bus i and khi, hk – Angle at bus i and at bus kaik – Impedance angle between buses i and kYik – Line admittance between buses i and k
J.E.O. Pessanha et al. / Electrical Power and Energy Systems 45 (2013) 293–302 299
coefficient to vary the step size and order of the method, as wellthe ability of preconditioned GMRES in solving a linear systemwith an ill-conditioned coefficient matrix.
Despite the numerical experiments have corroborated theBDF-GMRES robustness and efficiency; much more can be done
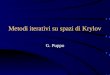
Fig. B.6. Typical structures of Jacobian matrices
to improve it, mainly in the GMRES iterative process once theBDF is well known in similar applications. A high quality precon-ditioner can, for instance, avoid the GMRES restarting. Inthis case, the search for an optimal m, which is costly, iseliminated.
Appendix A
A.1. Differential and algebraic equations
� mth synchronous machine internal equations
for hypo
ddidt ¼ xi �xs
dxidt ¼ 1
2Hi
� �� PMi � E00di � Idi � E00qi � Iqi � Di � Dxi
� �dE00didt ¼ 1
T 00q0i
� �� Iqi � L1i � E00di
� �dE00qi
dt ¼ L4i � E0qi þ 1T 00d0i
� �� E0qi � L2i � Idi � E00qi
� �_E0qi ¼ 1
T 0d0i
� �� ðEfdi � ALÞ
AL ¼ L6i � L5i � E00qi þ L3i � Idi � E00qi
� �þ Sati
� �i ¼ 1; . . . ;m
ðA:1Þ
� mth synchronous machine stator algebraic equation
thetical and real electrical systems.

Fig. 6. (continued)
300 J.E.O. Pessanha et al. / Electrical Power and Energy Systems 45 (2013) 293–302
0 ¼ Viejhi þ Rsi þ jX 0di
� �ðIdi þ jIqiÞejðdi�p=2Þ
� E0di þ X0qi � X 0di
� �Iqi þ jE0qi
h iejðdi�p=2Þ
i ¼ 1; . . . ;m
ðA:2Þ
� mth synchronous machine inductances
L1i ¼ Lqi � L00qi; L2i ¼ Ldi � L00di
L3i ¼ L00di � LLi; L4i ¼ L00di � LLi� �
= L0di � LLi� �
L5i ¼ ðLdi � LLiÞ= Ldi � L0di
� �; L6i ¼ Ldi � L0di
� �= L0di � LLi� �
i ¼ 1; . . . ;m
ðA:3Þ
� mth synchronous machine Automatic Voltage Regulator output(AVR-Efd)
Table B.4Electrical network.
System Smallest real part Largest real part
IEEE 30-bus 0.00798 95.70 26.42iIEEE 118-bus 0.00983 360.60 164.28iIEEE 145-bus 0.00519 5.621E+03 202.72iIEEE 162-bus 0.01871 2.122E+03 209.50iIEEE 300-bus �1.45015 4.164E+03 673.07iN-NE 274-bus �1.873E+03 20.703E+03
dEfdidt ¼ 1
T4i
� �� ðy1i þ T3i � _y1i � EfdiÞ
dy1idt ¼ 1
T2i
� �� ðKai � ðVref þ VPSSi � VOXLi � y2iÞ
þKai � T1i � ð _VPSSi � _VOXLi � _y2iÞ � y1iÞdy2idt ¼ 1
TMi
� �� ðy3i � y2iÞ
dy3idt ¼ 1
TMi
� �� ðVTi � y3iÞ
i ¼ 1; . . . ;m
ðA:4Þ
SIN 2256-bus �6.036E+03 12.4i 42.28E+03 11.2iSIN 3513-bus �6.286E+03 33.3i 304.36E+03 30.6i
� mth synchronous machine Power System Stabilizer output(PSS-Vout)
dVoutidt ¼ 1
T4i
� �� ðy4i þ T3i � _y4i � VoutiÞ
dy4idt ¼ 1
T2i
� �� ðy5i þ T1i � _y5i � y4iÞ
dy5idt ¼ 1
T1i
� �� ðk1i � D _xi � y5iÞ
i ¼ 1; . . . ;m
ðA:5Þ
� mth synchronous machine overexcitation limiter output (VOXL)
dVOXLidt ¼ difi � Bi
difi ¼ Ifdi � ð%� IfdÞi ¼ 1; . . . ;m
ðA:6Þ
� Network algebraic equations (mth generation bus and nth loadbus)

J.E.O. Pessanha et al. / Electrical Power and Energy Systems 45 (2013) 293–302 301
IdiVi sinðdi � hiÞ þ IqiV i cosðdi � hiÞ þ PLiðViÞ
�Xn
k¼1
ViVkYik cosðhi � hk � aikÞ ¼ 0
IdiVi cosðdi � hiÞ þ IqiV i sinðdi � hiÞ þ QLiðViÞ
�Xn
k¼1
ViVkYik sinðhi � hk � aikÞ ¼ 0
i ¼ 1; . . . ;m
ðA:7Þ
PLiðViÞ �Xn
k¼1
ViVkYik cosðhi � hk � aikÞ ¼ 0
Q LiðViÞ �Xn
k¼1
ViVkYik sinðhi � hk � aikÞ ¼ 0
i ¼ mþ 1; . . . ;n
ðA:8Þ
Tables A.2 and A.3 describe the symbols.
Taking into account the above differential and algebraic equa-tions, the corresponding DAE system representing the electricalpower system and its components is formed by [43]:
(a) Five differential equations for each synchronous machine;
_x ¼ f0ðx; Id�q;V ;uÞ ðA:9Þ
(b) Two stator algebraic equations of the form (A.7) in the polarform;
Id�q ¼ hðx;VÞ ðA:10Þ
(c) The network Eqs. A.7 and A.8 in the power balance form;
0 ¼ g0ðx; Id�q;VÞ ðA:11Þ
(d) Substituting Eq. (A.10) in Eqs. (A.9) and (A.11) results in:
_x ¼ f1ðx;V ;uÞ ðA:12Þ0 ¼ g1ðx;VÞ ðA:13Þ
Appendix B
B.1. Characteristics of power systems Jacobian matrices
Fig. B.6 shows typical structures of Jacobian matrices fordifferent power systems. It can be seen that the matrices are verysparse and structurally symmetrical, although numericallyasymmetrical. The National Interconnected System (the Braziliannational power grid, known by the acronym SIN) and North/Northeast systems (known by the acronym N/NE) correspond totwo configurations of the national interconnected system and asubsystem of this, respectively. Table B.4 shows the eigenvaluesfor different operating conditions. It can be seen that the magni-tude of the eigenvalue, particularly the real part, increases as thesize of the electrical system increases. In the IEEE 300-bus, N/NE274-bus and SIN power systems, the eigenvalues have negativereal parts, indicating that the matrices are indefinite. In suchcases the iterative method may suffer from convergence problemsand even fail.
References
[1] Duff IS, Erisman AM, Reid JK. Direct methods for sparsematrices. Oxford: Claredon; 1991.
[2] George A, Liu JW. Computer solution of large sparse positive definitesystems. Englewood Cliffs, NJ: Prentice-Hall; 1981.
[3] La Scala M, Bose A, Tylavsky DJ, Chai JS. A highly parallel method for transientstability analysis. Power Ind Comput Appl Conf 1989:380–6.
[4] Decker IC, Falco DM, Kaszkurewics E. Parallel implementation of a powersystem dynamic simulation methodology using the conjugate gradientmethod. IEEE Trans Power Syst 1992;7:458–65.
[5] Galiana FD, Javidi H, McFee S. On the application of a preconditioned conjugategradient algorithm to power network analysis. In: Proc. PICA conference; 1993.p. 404–10.
[6] Pai MA, Sauer PW, Kulkarni AY. A preconditioned iterative solver for dynamicsimulation of power systems. IEEE Int Symp Circ Syst 1995;2:1278–82.
[7] Semlyen A. Fundamental concepts of Krylov subspace power flowmethodology. IEEE Trans Power Syst 1996;11:1528–37.
[8] Flueck AJ, Chinag Hsiao-Dong. Solving the nonlinear power flow equationswith a Newton process and GMRES. IEEE Int Symp Circ Syst 1996;1:657–60.
[9] Pai MA, Dag H. Iterative solver techniques in large scale power systemcomputation. In: 36th IEEE conference on decision and control, vol. 4; 1997. p.3861–6.
[10] Chianotis D, Pai MA. A new preconditioning technique for the GMRESalgorithm in power flow and P–V curve calculation. Electr Power Energy Syst2002;25:239–45.
[11] Chen Ying, Shen Chen. A Jacobian-free Newton-GMRES(m) method withadaptive preconditioner and its application for power flow calculations. IEEETrans Power Syst 2006;21(3):1096–103.
[12] Mori H, Izuka F. An ILU(p)-preconditoner bi-CGStab method for power flowcalculation. In: Power systems, power engineering, conference on largeengineering systems; 2007. p. 1474–9.
[13] Chen Ying, Shen Chen, Wang Jian. Distributed transient stability simulation ofpower systems based on a Jacobian-Free Newton-GMRES method. IEEE TransPower Syst 2009;24(1):146–56.
[14] Siddhartha KK, McCalley JD. A class of new preconditioners for linear solversused in power system time-domain simulation. IEEE Trans Power Syst2010;24(4):1835–44.
[15] Pessanha JEO, PRADA R, Portugal C, PAZ ARA. Critical investigation ofpreconditioned GMRES via incomplete LU factorization applied to powerflow simulation. Int J Electr Power Energy Syst 2011;33:1695–701.
[16] Khani D, Yazdankhah b AS, Kojabadi HM. Impacts of distributed generations onpower system transient and voltage stability. Electr Power Energy Syst2012;43:488–500.
[17] Talaq J. Optimal power system stabilizers for multi machine systems. ElectrPower Energy Syst 2012;43:793–803.
[18] Ghosh S, Senroy N. The localness of electromechanical oscillations in powersystems. Electr Power Energy Syst 2012;42:306–13.
[19] Brenan K, Campbell S, Petzold L. Numerical solution of initial-value problemsin differential-algebraic equations. 2nd ed. SIAM -Classic Series, Philadelphia;1996.
[20] Saad Y, Schultz MH. GMRES: a generalized minimal residual algorithm forsolving nonsymmetric linear systems’. SIAM J Sci Stat Comput 1986;7:856–69.
[21] Gear CW. Numerical initial value problems in ordinary differential equations.1st ed. New Jersey: Prentice-Hall; 1971.
[22] Stott B. Power systems step-by-step calculations. In: IEEE 10th internationalsymposium on circuits and systems proceedings; 1977.
[23] Astic JY, Bihain A, Jerosolimski M. The mixed Adams-BDF variable step sizealgorithm to simulate transient and long term phenomena in power systems.IEEE Trans Power Syst 1994;9(2):929–35.
[24] EPRI EL 4610: extended transient midterm stability program; 1987.[25] Fankhauser HR, Aneros K, Edris A, Torseng S. Advanced simulation techniques
for the analysis of power system dynamics. IEEE Comput Appl Power1990;3(4):31–6.
[26] Jardim JLA. Manual of ORGANON – user guide, vol. 1. Version 1.2; 2006..[27] Jardim JLA. Manual of ORGANON – dynamic models reference, vol. 2. Version
1.2; 2006.[28] Jardim JLA. Manual of ORGANON – introduction methodology, vol. 3. Version
1.1; 2005.[29] Cash JR. Modified extended backward differentiation formulae for the
numerical solution of stiff initial value problems in EDOs and DAEs. ComputMath 2000;125:117–30.
[30] Brown PN, Hindmarsh AC, Petzold LR. Krylov methods in the solution oflarge-scale differential-algebraic systems. SIAM J Sci Comput 1994;15(6):1467–88.
[31] Saad Y. Iterative methods for sparse linear system. 2nd ed. SIAM, Society forIndustrial and Applied Mathematics, Philadelphia; 2003.
[32] DASPK. <http://www.cs.ucsb.edu/cse/software.html>.[33] Barrett R, Berry M, Chan TF, Demmel J, Donato J, Dongarra J, et al. Templates for
the solution of linear system building blocks for iterative methods. Electronicversion; 2006.
[34] Saad Y. ILUT: a dual threshold incomplete LU factorization. Numer LinearAlgebra Appl 1994;1(4):387–402.
[35] Benzi M. Preconditioning techniques for large linear systems: a survey. J CompPhys 2002;182:418–77.
[36] Meyer DC. Matrix analysis and applied linear algebra. SIAM society forindustrial and applied mathematics. Electronic version; 2000.
[37] Duff IS, Koster J. The design and use of algorithms for permuting large entriesto the diagonal of sparse matrices. SIAM J Matrix Anal Appl1999;20(4):889–901.
[38] Duff IS, Koster J. On algorithms for permuting large entries to the diagonal of asparse matrix. SIAM J Matrix Anal Appl 2002;22(4):973–96.

302 J.E.O. Pessanha et al. / Electrical Power and Energy Systems 45 (2013) 293–302
[39] Cuthill E. Several strategies for reducing the bandwidth of matrices. In: Sparsematrices and their applications. New York; 1972.
[40] Bacher R, Bullinger E. Application of non-stationary iterative methods to anexact Newton–Raphson solution process for power flow equations. In: Powersystems computation conference; 1996. p. 453–459.
[41] Gill PE, P.E., Murray W, Saunders MA. SNOPT: an SQP algorithm for large-scaleconstrained optimization. SIAM Rev 2005;47(1):99–131.
[42] Oldenburg CM, Borglin SE, S.E., Moridis GJ. Numerical simulation of ferrofluidflow for subsurface environmental engineering applications. Kluwer AcademicPublishers; 2000. pp. 319–344.
[43] Sauer PW, Pai MA. Power system dynamics and stability. Prentice Hall; 1998.