Embed Size (px)
Citation preview

JITENDRA K. TUGNAITDept. of Electrical & Computer EngineeringAuburn UniversityAuburn, AL 36849E-mail: ([email protected])
REFERENCES
[1] Bar-Shalom, Y., and Tse, E. (1975)Tracking in a cluttered environment with probabilisticdata association.Automatica, 11 (Sept. 1975), 451—460.
[2] Bar-Shalom, Y., and Fortmann, T. E. (1988)Tracking and Data Association.New York: Academic Press, 1988.
[3] Bar-Shalom, Y., Chang, K. C., and Blom, H. A. P. (1992)Tracking splitting targets in clutter using an interactingmultiple model joint probabilistic data association filter.In Y. Bar-Shalom (Ed.), Multitarget Multisensor Tracking:Applications and Advances.Reading, MA: Artech House, 1992, vol. II, 93—110.
[4] Bar-Shalom, Y., and Li, X. R. (1993)Estimation and Tracking: Principles, Techniques andSoftware.Norwood, MA: Artech House, 1993.
[5] Bar-Shalom, Y., and Li, X. R. (1995)Multitarget-Multisensor Tracking: Principles andTechniques.Storrs, CT: YBS Publishing, 1995.
[6] Blackman, S. S. (1986)Multiple Target Tracking with Radar Applications.Norwood, MA: Artech House, 1986.
[7] Blom, H. A. P., and Bar-Shalom, Y. (1988)The interacting multiple model algorithm for systemswith Markovian switching coefficients.IEEE Transactions on Automatic Control, AC-33 (Aug.1988), 780—783.
[8] Blom, H. A. P., and Bloem, E. A. (2000)Probabilistic data association avoiding track coalescence.IEEE Transactions on Automatic Control, AC-45 (Feb.2000), 247—259.
[9] Blom, H. A. P., and Bloem, E. A. (2002)Combining IMM and JPDA for tracking multiplemaneuvering targets in clutter.In Proceedings of the 5th International Conference onInformation Fusion, Vol. 1, Annapolis, MD, July 8—11,2002, 705—712.
[10] Chen, B., and Tugnait, J. K. (2001)Tracking of multiple maneuvering targets in clutter usingIMM/JPDA filtering and fixed-lag smoothing.Automatica, 37 (Feb. 2001), 239—249.
[11] De Feo, M., Graziano, A., Miglioli, R., and Farina, A.(1997)IMMJPDA versus MHT and Kalman filter with NNcorrelation: performance comparison.IEE Proceedings–Radar, Sonar, Navigation, 144 (Apr.1997), 49—56.
[12] Fortmann, T., Bar-Shalom, Y., and Scheffe, M. (1983)Sonar tracking of multiple targets using joint probabilisticdata association.IEEE Journal of Oceanic Engineering, OE-8 (July 1983),173—183.
[13] Houles, A., and Bar-Shalom, Y. (1989)Multisensor tracking of a maneuvering target in clutter.IEEE Transactions on Aerospace and Electronic Systems,25 (Mar. 1989), 176—188.
[14] Li, X. R., and Bar-Shalom, Y. (1993)Design of an interacting model multiple algorithm for airtraffic control tracking.IEEE Transactions on Control Systems Technology, 1 (Sept.1993), 186—194.
[15] Okello, N. N., and Pulford, G. W. (1996)Simultaneous registration and tracking for multiple radarswith cluttered measurements.In Proceedings of the 8th IEEE Workshop Stat. SignalArray Proc., Corfu, June 1996, 60—63.
[16] Pulford, G. W., and Evans, R. J. (1996)Probabilistic data association for systems with multiplesimultaneous measurements.Automatica, 32 (Sept. 1996), 1311—1316.
[17] Pulford, G. W., and Evans, R. J. (1998)A multipath data association tracker for over-the-horizonradar.IEEE Transactions on Aerospace and Electronic Systems,34 (Oct. 1998), 1165—1183.
Maneuver Detection Using the Radar Range RateMeasurement
Tracking maneuvering targets with radar is complicated
because radar cannot directly measure target accelerations.
We use the range rate measurement to calculate a new statistic
that is a surrogate measurement of target acceleration under a
constant rate turn model. Its distribution is found via simulation.
A threshold test of the statistic turns out to be a reliable detector
of a maneuver. A tracker that uses a threshold test of the new
statistic of accelerations to detect maneuvers and set the process
noise in a Kalman filter tracker is developed and compared
with other, common maneuvering track filters. The new method
compares favorably to a two mode interacting multiple model
(IMM) and a tracker that switches process noise levels based on
the position measurement innovations.
I. INTRODUCTION
Radar target tracking involves observation,measurement, association and state estimation.Radar measures a target’s range, one or two angles,and its range rate. Range rate, also called theDoppler or radial velocity, is the velocity along aline extending from the radar to the target. Tracksare data structures containing estimates of relevanttarget characteristics including position and velocity.
Manuscript received January 2, 2003; revised May 23, 2003;released for publication October 28, 2003.
IEEE Log No. T-AES/40/1/823272.
Refereeing of this contribution was handled by P. K. Willett.
0018-9251/04/$17.00 c° 2004 IEEE
330 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 40, NO. 1 JANUARY 2004

Association algorithms link radar measurements withexisting tracks by comparing the measurements to thetrack state estimate. The tracker filters the associatedmeasurements to update the track state estimates overtime. The Kalman filter, and related filters like the ®¯filter, are common track filters.Tracking maneuvering targets is an important
problem complicated by the fact that radar cannotdirectly measure target accelerations [3]. A variety oftechniques have been developed to detect maneuversand adjust the track filter to compensate for them.Mode switching and interacting multiple models(IMMs) are two common techniques for trackingmaneuvering targets. Their common feature is thatthey use the position measurement twice; first todetect or estimate the probability of a maneuver,then again to update the track state estimate. Thistype of data use is mathematically legitimate butsometimes can have undesirable effects. When themeasurement noise is high, the tracker’s gain isincreased, the noisy report is weighted more than itshould be, and the track jumps far from the actualtarget position.Mode switching trackers [2] detect maneuvers by
testing position measurement innovations for trends orinstantaneous changes in the target’s trajectory. If thetests indicate that a maneuver has occurred then thegain or process noise variance increases to improvetracking during the maneuver. Otherwise, the gain isset low to dampen the measurement noise.IMM trackers hypothesize two or more maneuver
modes and assume that the mode changes are modeledby a hidden Markov process. The measurementsare filtered through each mode to produce a setof state estimates conditioned on the hypothesizedmaneuver mode. The outputs are then combined asa weighted sum where the weights are proportionalto mode likelihoods [4]. The most basic IMM[5] has one low acceleration mode and one highacceleration mode and assumes that the Markov chaintransition probabilities are stationary and known. Morecomplicated IMMs can have nonstationary transitionprobabilities, autocorrelated maneuvers, and adaptivemode sets [4]. They perform well when the modesaccurately represent the true accelerations and arerelatively robust to small modeling errors. Theircomputational complexity increases linearly with thenumber of maneuver modes.Although the range rate measurement is used to
associate measurements to tracks [1], it is not alwaysused to filter the state estimate. The reason is simple:it is highly nonlinear with respect to a Cartesianstate space. Extending a Kalman filter tracker toaccount for the nonlinearities is reported to workwell sometimes [1], but fails to provide satisfactoryresults for all target trajectories [2]. Those trackersthat ignore range rate when filtering the state estimateare not using all of the radar information.
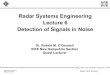
Fig. 1. Problem space: Cartesian frame with radar fixed at theorigin and moving target.
This paper develops a new statistic of accelerationsbased on the range rate measurement. The statisticturns out to be a reliable indicator of a maneuverand a good estimator of the acceleration. In SectionII, the statistic is derived from a constant rate turnmaneuver model. In Section III, its distributionfunction is evaluated via simulation. In Section IV,a mode switching tracker using the new statistic iscompared with a mode switching tracker using theposition measurement innovations and a two modeIMM. Section V summarizes significant results.
II. STATISTIC OF ACCELERATIONS
A. Problem Formulation
The problem is formulated in a two-dimensionalCartesian frame where the x and y axes are in the eastand north directions, respectively, as in Fig. 1. Thetarget is allowed to move anywhere in the plane. Itmaintains a constant velocity in the interval (0, tk¡1].At tk¡1 it begins a constant rate turn that lasts at leastuntil tk. Position is described by the coordinate pair(x,y). Velocity can be described by either speed andheading (s,®) or the component velocities in thedirections of the axes ( _x, _y). In a Cartesian system,the component representation is the most natural andeasiest to implement so we describe the target stateat time tk by the vector ©k = [x y _x _y]Tk . The statisticof accelerations is calculated using (s,®) which arerelated to ( _x, _y) by
s=p_x2 + _y2 (1)
®= arctanµ_x_y
¶: (2)
The radar is stationary, fixed at the origin, androtates at a constant angular velocity. It measures thetarget’s bearing µ, range r,and range rate _r. Range and
CORRESPONDENCE 331

bearing are converted to x and y in the usual manner.The pseudomeasurement
zk =
264xmym_rm
375k
=
264xy_r
375k
+uk (3)
is the input to the association and filtering algorithms,where subscript k denotes the kth measurement whichis taken at time tk, subscript m denotes a measuredvalue, and uk is the measurement error. Measurementerrors are assumed to be uncorrelated, white Gaussiannoises with known variances ¾2r , ¾
2µ , and ¾
2_r .
Range rate is the component of target velocity inthe direction of a line extending from the radar to thetarget. In Fig. 1, ° denotes the difference between theinverse bearing and target heading,
° = ®¡ (µ+180±): (4)
It is clear that the range rate equals the negativeproduct of speed and cosine of °
_r =¡scos(°): (5)
In terms of the track state vector
_r =x _x+ y _ypx2 + y2
: (6)
Given the target state the range rate is uniquelydetermined. However, it is clear from (6) that giventhe range rate the target state can have infinitely manyvalues. Next, we propose a maneuver model, placesome reasonable restrictions on acceleration, and finda finite number of solutions to (6). The solutionsrepresent accelerations that could have acted on thetarget.The target starts at time 0 and moves with fixed
speed and heading until tk¡1, the time of the (k¡1)thmeasurement. At tk¡1 it either continues at the samespeed and heading or makes a constant rate turn thatlasts at least until tk. Thus, in the interval (tk¡1, tk]the target is acted upon by either no acceleration ora constant centripetal acceleration.A constant centripetal acceleration acting on
a moving body induces constant speed circularmotion. If the target turns, its speed is constant and itstrajectory is a circular arc whose radius of curvaturedepends on both target speed and the strength of theacceleration. The arc’s length equals the distance thetarget traveled, sk¡1(tk ¡ tk¡1), and its angular widthequals the ratio of its length to its radius of curvature.Speed is constant so the arc is swept at a constantangular rate. Target heading is always tangential tothe path. Therefore, heading also changes at a constantangular rate and the total change in heading equals theangular arc width.
B. Calculating the Statistic of Accelerations
Given the target’s initial position and componentvelocities, and the strength and duration of theacceleration, the target’s final state is uniquelydetermined. When the state is known the range rate,relative to a radar at the origin, is uniquely determinedby (6). However, infinitely many states have thesame range rate. Even if the initial state ©k¡1 andturn duration (tk ¡ tk¡1) are known with certainty,many accelerations result in the same range rate.Thus the mapping from acceleration to range rate _rkis many-to-one. If the accelerations are allowed to bearbitrarily large the mapping is infinitely-many-to-one.Conversely, it is true that conditional on initial state©k¡1 the model provides a one-to-many mappingfrom the final range rate rk to the accelerations thatmight have been acting on the target. We limit thenumber of possible accelerations by requiring that thetarget changes heading by no more than 360± betweenmeasurements.The statistic of accelerations was first introduced
in [6]. It is calculated by conditioning on the previousstate estimate ©k¡1 and finding the accelerations thatwould have resulted in states with range rates equalto the measured range rate _rm,k. First, range rate ismapped to a set of target headings. These are mappedto a set of possible heading changes. Heading changeequals the target trajectory’s angular arc width, soeach heading change corresponds to exactly one arc.The radii of curvature of these arcs can be determined.Finally, the radii are mapped to accelerations.Given the previous state estimate ©k¡1, the current
range rate measurement _rm,k, and assuming thatthe maneuvers are constant rate turns, a vector ofaccelerations c is calculated as follows. The target’sestimated speed is
sk = sk¡1 =
r_x2
k¡1 + _y2
k¡1 (7)
where “ˆ” denotes an estimated state value. Theangular difference between the inverse bearing andheading is determined by solving (5) for °
°k = arccosµ¡_rm,ksk
¶: (8)
Cosine is symmetric so conditional on the bearing µkthere are two possible headings that solve (4),
®k = (µk +180±)§ °k: (9)
If the target is far from the radar, its speed is nottoo large, and the radar scans sufficiently fast thenthe bearing does not change much. It approximatelyequals
µk ¼ arctanµxk¡1yk¡1
¶: (10)
332 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 40, NO. 1 JANUARY 2004

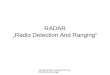
Fig. 2. Four possible turns, two to left and two to right, suchthat actual and measured range rates are equal.
Bearing error dominates position measurement errorso (10) is likely a better estimate of the true bearingthan the latest measurement.Fig. 2 shows four turns that take the target
from its initial heading to ®k. Either heading canbe attained by a turn to the left or to the right.More maneuvers are possible if the target can makemore than one complete revolution between radarmeasurements. By restricting the analysis to turnsof less than one revolution, there are only fourpossible maneuvers. Denoting the heading changesfor these maneuvers by ¿ , so that ¿left = (®k¡1¡®k)¢mod(360±) and ¿right = (®k ¡®k¡1)mod(360±), andsorting appropriately, yields a four-vector of possibleturns
¿k =
26664¿max left
¿min left
¿min right
¿max right
37775T
k
: (11)
Recall that the trajectories are circular arcs whoseangular widths equal heading change. Therefore, ¿kcan be interpreted as one-to-four mapping from rangerate to heading change. Radius of curvature equalsthe ratio of the arc length to the angular arc width.Denoting the radii ½,
½k =sk(tk ¡ tk¡1)
¿k(12)
where the division is understood to be on an elementby element basis. Centripetal acceleration equals theratio of speed squared to the radius of curvature.There are four accelerations that cause turns resultingin the measured range rate,
ck =s2k½k: (13)
The elements of ck are the magnitudes of theaccelerations that could have acted upon thetarget
ck =
26664cmax left
cmin left
cmin right
cmax right
37775T
k
: (14)
ck is then scaled to gs, where 1g = 9:8 m/s2. As
shown in Sections III and IV, the minimum of thesevalues
cmin,k =min(ck) (15)
is a statistic that turns out to be a reliable indicator ofa maneuver over a wide range of accelerations.
C. Remarks
Consider the four maneuvers shown in Fig. 2. Theacceleration of the smallest turn to the left is muchless than that of the others. No matter which turnthe target actually makes, cmin will approximatelyequal the acceleration causing the smallest turn. If thetarget maneuvers are not too strong, cmin is expectedto be a good estimate of the actual accelerationand its distribution should have a mode near theactual acceleration. If the maneuvers are large thencmin is expected to underestimate the acceleration.Its distribution may have a mode near the actualacceleration and it could have multiple modes atlower accelerations. This behavior is demonstrated viasimulation in Section III.The maneuver model assumes that target speed is
constant between measurements. If speed increasesor the range rate measurement is very noisy thenthe measured range rate might exceed the target’sestimated speed. In that case (8) has no solution. Anyfilter that uses cmin should check for this conditionby comparing estimated speed with measured rangerate.
III. EMPIRICAL DISTRIBUTION OF cmin
The mapping from range rate to cmin ismany-to-one and nonlinear. The distributional formof the range rate measurement error is not preservedunder transformation. The empirical distributionof cmin is evaluated via simulation. It depends ontarget speed, heading and range, turn strength anddirection, and radar scan rate and error distribution. Itdoes not depend on the bearing to the target becausethe tracking problem is invariant under rotation. Asimulation that varies the relevant parameters to create2,240 different trajectories, as shown in Table I, isused to find the empirical distribution. The simulatedradar is fixed at the origin and has a scan period of10 s. Its measurement errors are white, Gaussian
CORRESPONDENCE 333

TABLE IManeuvering Target Trajectory Parameters and Levels
Trajectory Parameter Levels
Range at start of maneuver 50,100, : : : ,250 nautical miles (nm)Initial heading 0,45, : : : ,315 degrees
Speed 100,200, : : : ,700 knots (kts)Centripetal Acceleration 0,1, : : : ,3g
Turn Direction left, right
noises with standard deviations ¾r = 100 ft, ¾µ = 1±,
and ¾_r = 2 knots.A single-mode uniform motion Kalman filter
(UMKF) tracks the target. Its process noises are white,Gaussian accelerations in the x and y directions withstandard deviations equal to 0:03g. Its measurementnoises match the radar measurement noises. The targettravels for 300 s at a constant velocity before it turns.Detection is perfect so the radar observes the target 30times before the maneuver starts. The 31st detection isthe first detection after the maneuver starts.The simulation runs 100 times for each
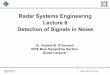
combination of factors in Table I and collectsthe sequences of cmin. The histograms in Fig. 3are constructed on the values of cmin at the firstdetection after the maneuver starts. They areempirical probability densities of cmin conditional onaccelerations from 0g to 3g. They exhibit the expectedcharacteristics described at the end of Section II:range rate measurement error distribution is notpreserved under transformation; densities of cmin areasymmetric and multimodal with modes near andbelow the actual acceleration; for accelerations 1g andabove, cmin has modes and expectations less than theactual acceleration.
IV. EXAMPLE
A UMKF tracker that sets process noise levelsbased on a threshold test of cmin is compared with twoother trackers. The cmin tracker models process noisesas random, white, Gaussian accelerations in the x andy directions. If cmin is less than 1g then process noisestandard deviations are ¾low = 0:03g. Otherwise, theyare ¾high = 0:6g. These noise levels are taken from thetwo mode IMM described in [5, ch. 1].The first tracker to which the cmin tracker is
compared is a mode switching UMKF that setsprocess noise levels based on threshold test of afading memory average (FMA) of the positionmeasurement innovations, as described in [2] and [7].The test statistic is calculated recursively by
FMAk = 0:25ek +0:75FMAk¡1 (16)
where ek =q(x¡ xm)2k +(y¡ ym)2k and FMA0 =
10 nm. If FMAk is less than 3 nm then the process
Fig. 3. Histograms of cmin for 0 to 3g turns with varying targetrange, speed, heading, and turn direction. 56,000 samples per
histogram.
noises standard deviations equal ¾low. Otherwise, theyequal ¾high. The second tracker is the two-mode IMMdescribed in [5, ch. 1]. Its process noise standarddeviations are ¾low and ¾high for the nonmaneuveringand maneuvering modes, respectively. Modetransitions are assumed to follow a Markov chain withtransition probability matrix
P =·0:9 0:1
0:33 0:67
¸: (17)
The simulated radar is the same as in the previoussection: it is fixed at the origin, has a 10 s scanperiod, and white Gaussian measurement noiseswith standard deviations ¾r = 100 ft, ¾µ = 1
±, and¾_r = 2 kts. There is no clutter and detection is perfect.Each tracker’s measurement noise distribution matchesthe radar noise distribution.All three trackers are run against the same sets of
simulated radar data and start the same way. The firsttwo detections start the track. For the next seventeendetections the track state is estimated with a Kalmantracker whose process noises have standard deviations¾low. This ensures a fair comparison by letting theinitial errors stabilize and guaranteeing that all trackershave the same mean and covariance estimates at theend of the startup period. Starting with the twentiethmeasurement the trackers perform as described aboveand can produce different estimates.Fig. 4 shows the simulated target trajectory. The
target starts about 125 nm from the radar and movesat 500 kts on a heading of 240±. When it is due northof the radar it starts a 3g constant rate turn to theright that lasts 20 s. After the turn the target travelsapproximately north for another 170 s.The simulation was run 500 times. Mean position
and speed errors are shown in Figs. 5 and 6. The cmintracker errors are always less than or equal to thoseof the FMA tracker, and approximately equal those ofthe IMM tracker.
334 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 40, NO. 1 JANUARY 2004

Fig. 4. Target trajectory: 500 knot target making a 3g turn.
Fig. 5. Mean position errors of the cmin, IMM, and FMAtrackers.
Fig. 6. Mean speed errors of the cmin, IMM, and FMA trackers.
After the warmup period ends the only differencebetween the two mode switching trackers is thestatistical test used to set process noise levels. Theyproduce identical solutions until one, but not both,declares a maneuver. After that their solutions differ.The cmin tracker is better than the FMA trackerbefore the maneuver because it declares fewer falsemaneuvers. In 500 runs, the threshold test of cminnever declares a false maneuvers on the detectionjust before the maneuver starts, while the FMAtest declared them at a rate of 0.18. When a modeswitching tracker declares a false maneuver its gains
are set too high. The track position estimate jumps along way and the speed estimate increases to accountfor the large position change. Position error at thenext measurement equals current position error plusintegrated speed error. If the current position erroror time between measurements is large enough thenthe probability of a false alarm based on the FMAtest of the next measurement is higher. Every falsealarm increases the probability of future false alarms,increases the position errors, and causes the tracker tooverestimate target speed.Two factors account for the cmin tracker’s
dominance of the FMA tracker during the maneuver.First, it is more accurate just before the maneuverstarts. Second, the cmin test detects maneuversmore quickly. It detects the maneuver immediately500 times in 500 simulation runs. The FMA testtends to lag the maneuver. It detects the maneuveronly 122 times on the first measurement after itstarts; it is not until the second measurement thatthe FMA test detects the maneuver more than halfthe time. Thus, the FMA tracker is undersensitiveto the innovation during the maneuver, and overoversensitive afterwards.The cmin and IMM trackers perform similarly.
Before the maneuver the cmin test correctly indicatesthat the target is not maneuvering at a rate of 0.996,so it is almost always in the correct mode. The IMMsolution is a weighted sum of two solutions: oneconditional on the correct hypothesis of no maneuverand one conditional on the incorrect hypothesis ofa maneuver. The IMM’s maneuvering mode mixingweights are small but non-zero; therefore, its average,effective gain is slightly larger than the cmin tracker’s.The position errors of the two trackers are practicallyidentical, but the cmin tracker appears to have slightlylower speed errors. Once the maneuver starts, theIMM adapts to the size of the innovation and itsposition estimates attain a small, but perceptible,advantage.For this simulation, the cmin tracker detects
maneuvers so reliably that it is more accuratethan a mode switching tracker testing the positionmeasurement innovations, and about as accurate asa two mode IMM. By interpreting range rate as asurrogate measure of acceleration, we have extractedenough useful information to improve a maneuveringtarget tracker.
V. CONCLUSIONS
Range rate is nonlinear in Cartesian space so somemaneuvering target trackers ignore it when estimatingtrack state. We interpret it as a surrogate measure ofcentripetal acceleration and derive an algorithm thatmaps it into a statistic of accelerations. The statistic,called cmin, can be interpreted as the minimumacceleration that could have acted on the target to
CORRESPONDENCE 335

yield the measured range rate, given the previous stateestimate. The mapping is nonlinear and many-to-one,so the distributional form of the measurement errorsare not preserved under transformation and the newstatistic’s distribution function of the new statisticmust be determined via simulation.The new statistic of accelerations reliably indicates
maneuvers. Simulation results show that a trackerswitching process noise levels based on a thresholdtest of cmin can perform better than a tracker switchingnoise levels based on a test of position measurementinnovations, and can perform similarly to a two-modeIMM tracker. Range rate measurements containenough information about the target’s maneuver statethat proper use of the new statistic can improve amaneuvering target tracker.
DAVID F. BIZUPDONALD E. BROWNSystems and Information EngineeringUniversity of VirginiaCharlottsville, VA 22904E-mail: ([email protected])
REFERENCES
[1] Kameda, H., Tsujimichi, S., and Kosuge, Y. (2002)Target tracking using range rate measurement under denseenvironments.Electronics and Communications in Japan, Pt. I,Communications, 85 (2002), 19—29.
[2] Schutz, R., McAllister, R., and Engleberg, B. (1997)Combined Kalman filter and JVC algorithms for AEWtarget tracking applications.In SPIE Conference on Signal and Data Processing ofSmall Targets, Vol. 3163, July 1997, 164—175.
[3] McIntyre, G. A., and Hintz, K. J. (1998)Comparison of several maneuver tracking models.In SPIE Conference on Signal Processing, Sensory Fusion,and Target Recognition VII, Vol. 3374, Apr. 1998, 48—63.
[4] Mazor, E., Averbuch, A., Bar-Shalom, Y., and Dayan, J.(1998)
Interacting multiple model methods in target tracking:A survey.IEEE Transactions on Aerospace and Electronic Systems,34, 1 (Jan. 1998), 103—123.
[5] Bar-Shalom, Y., and Li, X. (1995)Multitarget-Multisensor Tracking: Principles andTechniques.Storrs, CT: YBS Press, 1995.
[6] Bizup, D. (2002)A centripetal acceleration statistic for trackingmaneuvering targets with radar.In Proceedings of the 7th International Command andControl Research and Technology Symposium, 2002.
[7] Schutz, R., McAllister, R., and Engleberg, B. (1999)Maneuver tracking algorithms for AEW target trackingapplications.SPIE Conference on Signal and Data Processing of SmallTargets, Vol. 3809, July 1999, 308—319.
Detect-Track-Confirm Filter with MinimalConstraints
We describe the theory of a detect-track-confirm filter
whose role is moving target detection and clutter suppression
in surveillance data. The filter has broad generality due to the
minimal assumptions made in developing the theory. Track
confirmation is decided on the basis of a probability measure
that is fully computable from clutter properties measured from
surveillance data, without needing to assume target properties
such as trajectory or detectability. Experimental results on real
surveillance datasets are presented.
I. INTRODUCTION
The detection of moving targets in surveillancedatasets dominated by false detections from clutterand noise may be addressed by tracking methods,but conventional target tracking algorithms arenot necessarily good target detection algorithms.Since neither the accurate state estimation nor thecomprehensive data association that are features ofgood multiple target trackers are essential for targetdetectors, conventional trackers are encumbered byunimportant capability, complexity and constraintsfrom a target detection perspective. Many conventionaltracking methods cannot accommodate clutter,or missed true detections (i.e., gaps in tracks), ormultiple true detections in individual tracks in singlescans, or severe and abrupt maneuvers, all of whichmust be tolerated by robust target detectors. Manytarget trackers, most notably those derived from theprobabilistic data association [1] algorithm, onlyoutput the target motion state estimate and uncertainty,without explicitly distinguishing between true andfalse detections. Hence there are compelling reasonsfor devising tracking filters for target detection andclutter suppression, rather than target tracking per se.This correspondence presents the theory for such afilter, followed by a demonstration of the filter on realsurveillance data. The term “filter” is used here for analgorithm that filters out false detections, rather thanthe common tracking interpretation of an algorithmthan filters out measurement noise.
Manuscript received June 7, 2001; revised January 28 andNovember 5, 2003; released for publication November 5, 2003.
IEEE Log No. T-AES/40/1/826482.
Refereeing of this contribution was handled by P. K. Willett.
0018-9251/04/$10.00 c°Australian Crown Copyright
336 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 40, NO. 1 JANUARY 2004