Embed Size (px)
Citation preview

Master : SDI/SAR
Mention : Sciences De l’IngénieurSpécialité : « Systèmes Avancés et Robotique »
Faïz Ben Amar
[email protected]@isir.upmc.fr
http://www.master.sdi.upmc.fr/fr/mecanique/sar.html

Positionnement de la spécialité
� Objectifs : Ce master vise à former des spécialistes dans le domaine général des machines et des systèmes mécatroniques intelligents.
�Connaissances de base en SDI
�Systèmes mécatroniques�Systèmes mécatroniques�Robotique manufacturière
�Système de production
�Transport (terrestre, aérien)
�Machines intelligentes�Robotique de service
�Domotique
�Technologie pour la santé
�Méthodologie�Outils d’analyse XAO
�Outils d’optimisation
�Techniques de commande

Exemples de systèmes
Débouchés
- Bureaux d’études d’entreprisesindustrielles
- Bureaux de méthodes (production)
- Service innovation
- Sociétés de service en CAO et design
- Sociétés de service en conception et commande de systèmes
- Sociétés de hautes technologies

Compétences visées
• Spécialiste en matière de modélisation, analyse et conception de systèmes mécaniques actifs.
• Savoir définir les fonctions et performances recherchées
Proposer des solutions “systèmes”• Proposer des solutions “systèmes”
• Développer des modèles d’analyse
• Utiliser des systèmes de CAO et de simulation pour qualifier les propositions
• Analyser les performances d’ensemble
• Etudier les problèmes d’industrualisation
• Définir les capteurs et actionneurs
• Définir et mettre au point les moyens de commande
• Proposer des méthodes de contrôle des performances,
etc ....
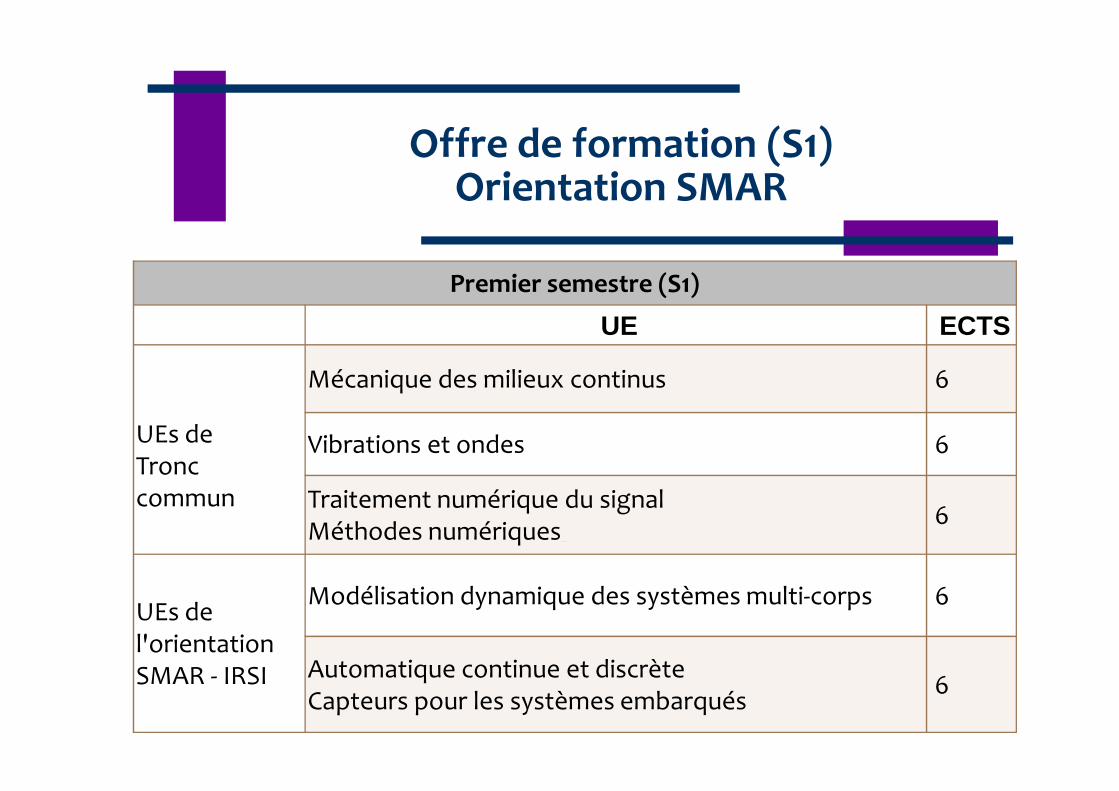
Offre de formation (S1)Orientation SMAR
Premier semestre (S1)
UE ECTS
Mécanique des milieux continus 6
UEs deTronccommun
Vibrations et ondes 6
Traitement numérique du signal Méthodes numériques
6
UEs del'orientationSMAR - IRSI
Modélisation dynamique des systèmes multi-corps 6
Automatique continue et discrèteCapteurs pour les systèmes embarqués
6
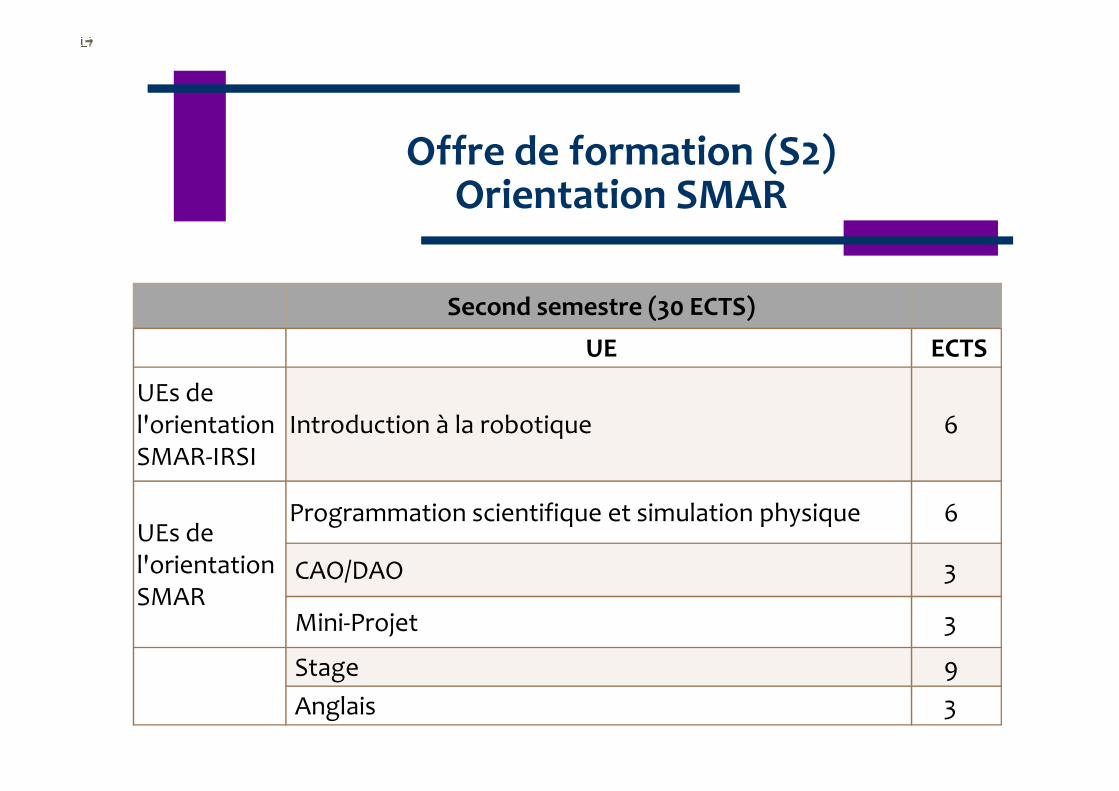
Offre de formation (S2)Orientation SMAR
Second semestre (30 ECTS)
UE ECTS
UEs deUEs del'orientationSMAR-IRSI
Introduction à la robotique 6
UEs del'orientationSMAR
Programmation scientifique et simulation physique 6
CAO/DAO 3
Mini-Projet 3
Stage 9
Anglais 3
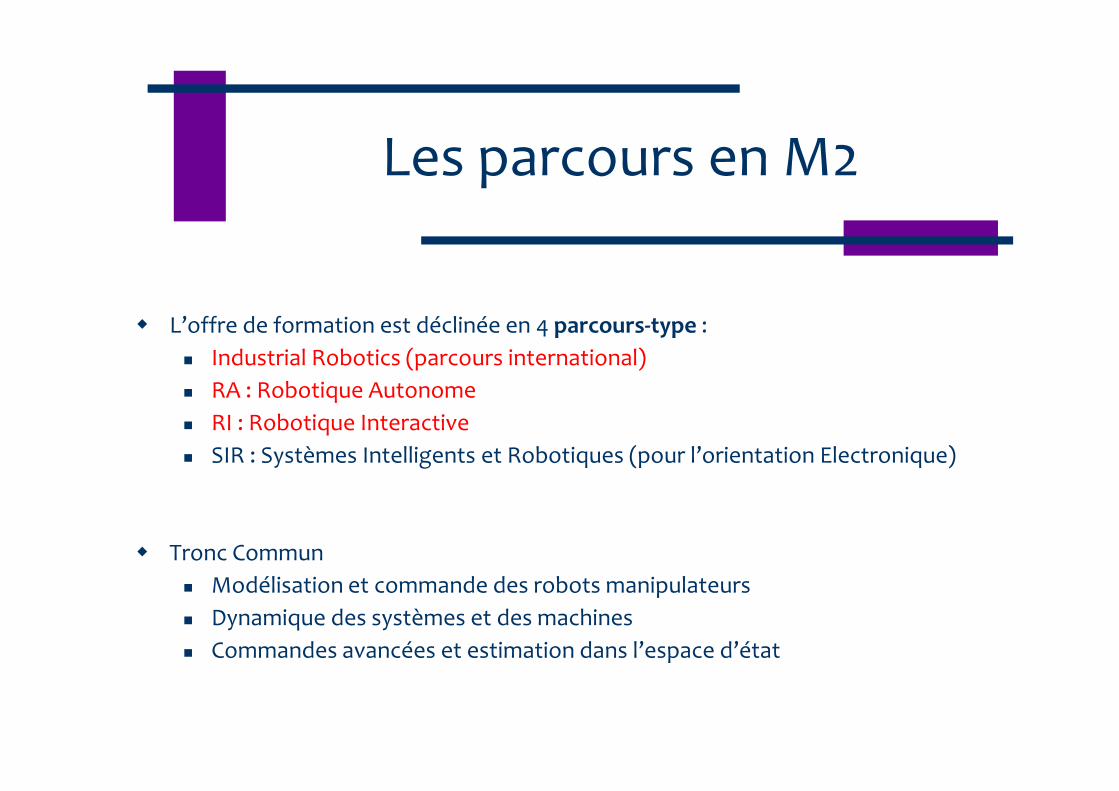
Les parcours en M2
� L’offre de formation est déclinée en 4 parcours-type :
� Industrial Robotics (parcours international)
� RA : Robotique Autonome� RA : Robotique Autonome
� RI : Robotique Interactive
� SIR : Systèmes Intelligents et Robotiques (pour l’orientation Electronique)
� Tronc Commun
� Modélisation et commande des robots manipulateurs
� Dynamique des systèmes et des machines
� Commandes avancées et estimation dans l’espace d’état

Parcours international M2 :
Industrial Robotics (IR)
� Industrial Robotics (IR) : Robotique manufacturière, centre
d’usinage à GV, analyse vibratoire, contrôle des vibrations,identification en ligne des paramètres, commande et planification,modélisation et simulation des cellules flexibles, ...modélisation et simulation des cellules flexibles, ...
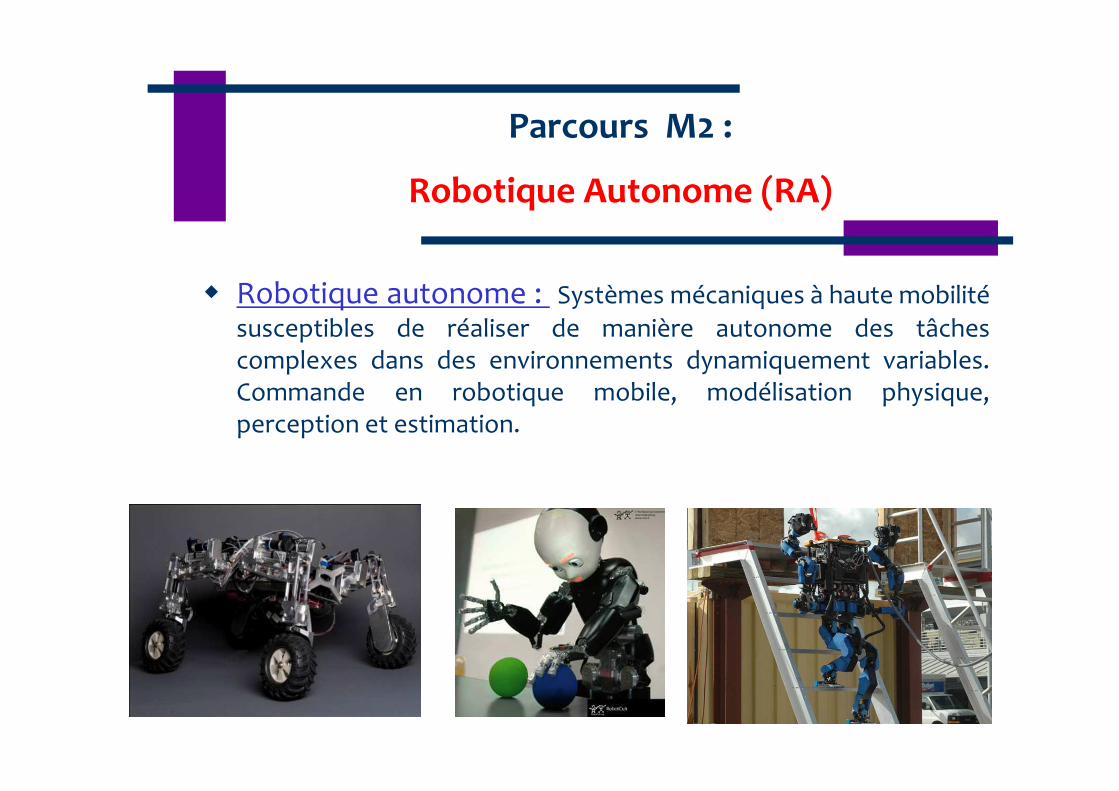
Parcours M2 :
Robotique Autonome (RA)
� Robotique autonome : Systèmes mécaniques à haute mobilité
susceptibles de réaliser de manière autonome des tâchescomplexes dans des environnements dynamiquement variables.Commande en robotique mobile, modélisation physique,Commande en robotique mobile, modélisation physique,perception et estimation.
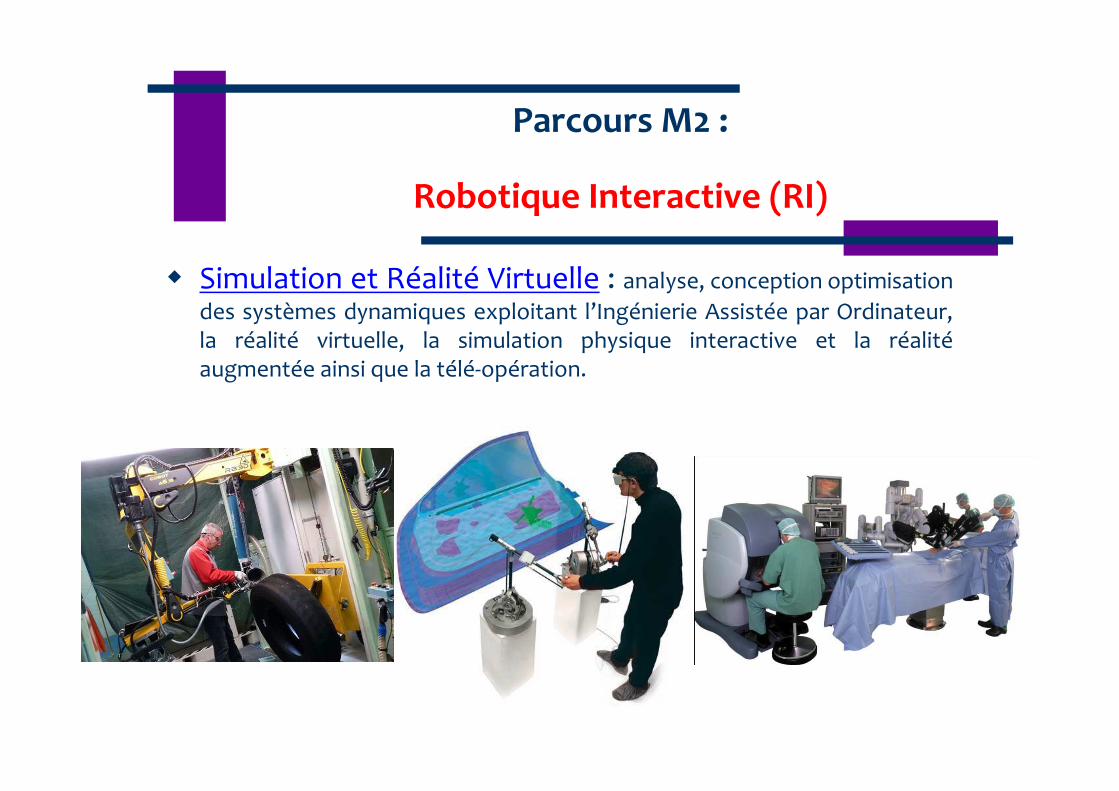
Parcours M2 :
Robotique Interactive (RI)
� Simulation et Réalité Virtuelle : analyse, conception optimisation
des systèmes dynamiques exploitant l’Ingénierie Assistée par Ordinateur,la réalité virtuelle, la simulation physique interactive et la réalitéaugmentée ainsi que la télé-opération.
Laboratoires d’adossement .
� Laboratoires de recherche principaux partenaires de la spécialité : � Institut des Systèmes Intelligents et de Robotique (ISIR) :
http://www.upmc.isir.fr/
Process and Engineering in Mechanics and Materials (PIMM) de l'ENSAM�Process and Engineering in Mechanics and Materials (PIMM) de l'ENSAM
http://pimm.paris.ensam.fr/
�Centre de Robotique (CAOR) – Ecole des Mines de Paris
http://www.mines-paristech.fr/Centre-de-robotique-CAOR/
�Robotics and computer vision – ENSTA
http://cogrob.ensta-paristech.fr/
�Autres laboratoires partenaires :� CEA-LIST (Service de Robotique et Systèmes Interactifs)
� UPMC Paris 6 :
Faiz Ben Amar ([email protected])
� Ecole des Mines de Paris :
Responsables pédagogiques
Brigitte D’andrea-Novel ([email protected]
� ENSAM :
Nazih Mechbal ([email protected])
� ENSTA :
David Filliat ([email protected])
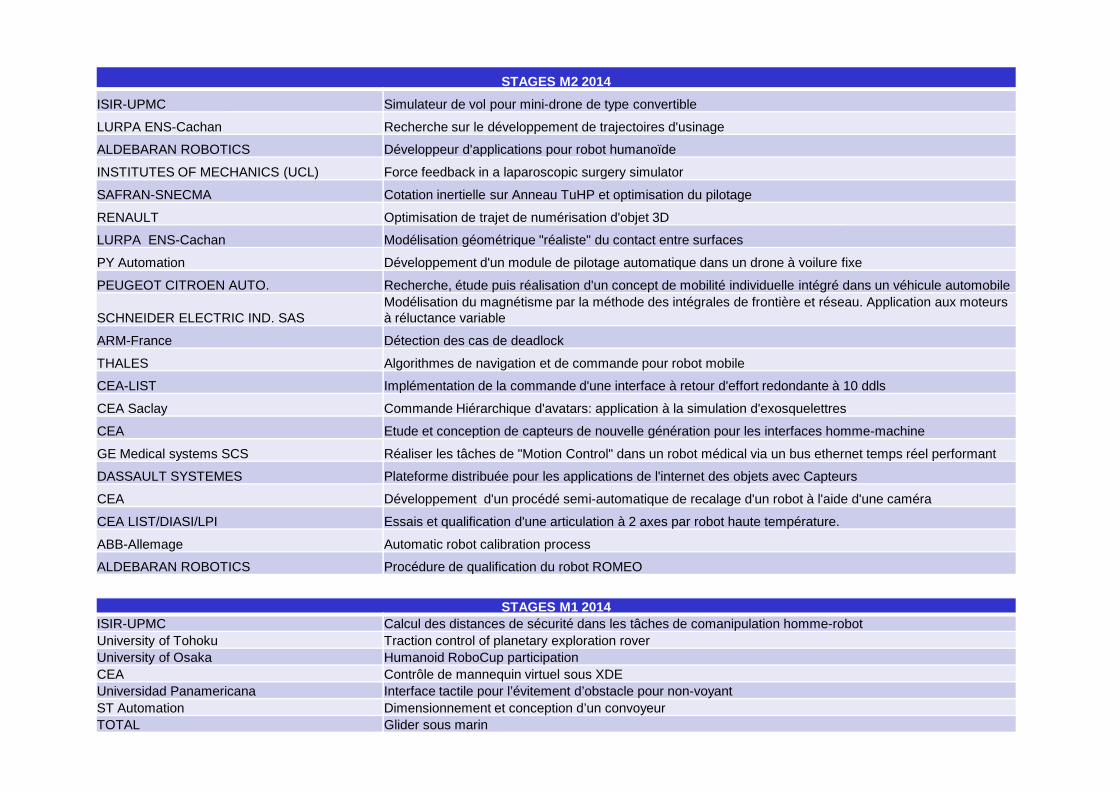
STAGES M2 2014
ISIR-UPMC Simulateur de vol pour mini-drone de type convertible
LURPA ENS-Cachan Recherche sur le développement de trajectoires d'usinage
ALDEBARAN ROBOTICS Développeur d'applications pour robot humanoïde
INSTITUTES OF MECHANICS (UCL) Force feedback in a laparoscopic surgery simulator
SAFRAN-SNECMA Cotation inertielle sur Anneau TuHP et optimisation du pilotage
RENAULT Optimisation de trajet de numérisation d'objet 3D
LURPA ENS-Cachan Modélisation géométrique "réaliste" du contact entre surfaces
PY Automation Développement d'un module de pilotage automatique dans un drone à voilure fixe
PEUGEOT CITROEN AUTO. Recherche, étude puis réalisation d'un concept de mobilité individuelle intégré dans un véhicule automobile
SCHNEIDER ELECTRIC IND. SASModélisation du magnétisme par la méthode des intégrales de frontière et réseau. Application aux moteurs à réluctance variable
ARM-France Détection des cas de deadlock
THALES Algorithmes de navigation et de commande pour robot mobile
CEA-LIST Implémentation de la commande d'une interface à retour d'effort redondante à 10 ddls
CEA Saclay Commande Hiérarchique d'avatars: application à la simulation d'exosquelettres
CEA Etude et conception de capteurs de nouvelle génération pour les interfaces homme-machine
GE Medical systems SCS Réaliser les tâches de "Motion Control" dans un robot médical via un bus ethernet temps réel performant
DASSAULT SYSTEMES Plateforme distribuée pour les applications de l'internet des objets avec Capteurs
CEA Développement d'un procédé semi-automatique de recalage d'un robot à l'aide d'une caméra
CEA LIST/DIASI/LPI Essais et qualification d'une articulation à 2 axes par robot haute température.
ABB-Allemage Automatic robot calibration process
ALDEBARAN ROBOTICS Procédure de qualification du robot ROMEO
STAGES M1 2014ISIR-UPMC Calcul des distances de sécurité dans les tâches de comanipulation homme-robot University of Tohoku Traction control of planetary exploration roverUniversity of Osaka Humanoid RoboCup participationCEA Contrôle de mannequin virtuel sous XDEUniversidad Panamericana Interface tactile pour l’évitement d’obstacle pour non-voyantST Automation Dimensionnement et conception d’un convoyeur TOTAL Glider sous marin









