-
z=f(x,y)
x
z
y
MATH 234THIRD SEMESTER
CALCULUS
Fall 2013
1
-
2
Math 234 – 3rd Semester CalculusLecture notes version 0.9(Fall
2013)
is is a self contained set of lecture notes for Math 234. e
notes were wrien bySigurd Angenent, some problems were taken from
Guichard’s open calculus text whichis available at
http://www.whitman.edu/mathematics/multivariable/src/
e LATEX files, as well as the P and I files that were used to
pro-duce the notes before you can be obtained from the following
web site:
http://www.math.wisc.edu/~angenent/Free-Lecture-Notesey are
meant to be freely available for non-commercial use, in the sense
that “freesoware” is free. More precisely:
Copyright (c) 2009 Sigurd B. Angenent. Permission is granted to
copy, distribute and/or modify thisdocument under the terms of the
GNU Free Documentation License, Version 1.2 or any laterversion
published by the Free Soware Foundation; with no Invariant
Sections, no Front-CoverTexts, and no Back-Cover Texts. A copy of
the license is included in the section entitled ”GNU
FreeDocumentation License”.
http://www.whitman.edu/mathematics/multivariable/src/http://www.math.wisc.edu/~angenent/Free-Lecture-Notes
-
Contents
Chapter 1. Vector Geometry in Three dimensional space 51. Three
dimensional space 52. Geometric description of vectors 53.
Arithmetic of vectors 64. Vector algebra 75. Component
representation of vectors 86. The dot product 97. The cross product
108. The triple product 129. Determinants 1310. Determinants, the
triple product, and the cross product 1311. Defining equations for
lines and planes 1412. Problems 16
Chapter 2. Parametric curves and vector functions 191. Vector
functions 192. Using vector functions to describe motion 193. Lines
204. Circular motion 205. The cycloid 216. The helix 217. The
derivative of a vector function 228. The derivative as velocity
vector 239. Acceleration 2410. The differentiation rules 2511.
Vector functions of constant length 2612. Two examples 2713. Arc
length 2814. Arc length derivative 2915. Unit Tangent and Curvature
3016. Osculating plane 3117. Problems 31
Chapter 3. Functions of more than one variable 351. Functions of
two variables and their graphs 352. Linear functions 383. adratic
forms 394. Functions in polar coordinates r, θ 425. Methods of
visualizing the graph of a function 44Problems 46
Chapter 4. Derivatives 491. Interior points and continuous
functions 492. Partial Derivatives 503. Problems 514. The linear
approximation to a function 525. The tangent plane to a graph
55
3
-
4 CONTENTS
6. The Two Variable Chain Rule 587. Problems 618. Gradients 629.
The chain rule and the gradient of a function of three variables
6610. Implicit Functions 69Problems 7211. The Chain Rule with more
Independent Variables;
Coordinate Transformations 7312. Problems 7513. Higher Partials
and Clairaut’s Theorem 7814. Finding a function from its
derivatives 7915. Problems 81
Chapter 5. Maxima and Minima 831. Local and Global extrema 832.
Continuous functions on closed and bounded sets 833. Problems 854.
Critical points 865. When there are more than two variables 896.
Problems 917. A Minimization Problem: Linear Regression 928.
Problems 939. The Second Derivative Test 9410. Problems 9911.
Second derivative test for more than two variables 10012.
Optimization with constraints and the method of Lagrange
multipliers 10113. Problems 104
Chapter 6. Integrals 1051. Ways of Integrating 1052. Double
Integrals 1063. Problems 1184. Triple integrals 1195. Why compute a
Triple Integral? 1226. Integration in special coordinate systems
1277. Problems 130
Chapter 7. Vector Calculus 1351. Vector Fields 1352. Examples of
vector fields 1353. Line integrals 1384. Problems 1405. Line
integrals of vector fields 1406. Another Fundamental Theorem of
Calculus 1467. Conservative vector fields 1488. Problems 1499. Flux
integrals 14910. Green’s Theorem 15311. Conservative vector fields
and Clairaut’s theorem 15512. Problems 15713. Surfaces and Surface
integrals 15814. Examples 16315. The divergence theorem and Stokes’
theorem 16516.
#‰∇ – differentiating vector fields 16617. Problems 169
Math 234 – Answers and Hints 173
-
CHAPTER 1
Vector Geometry in ree dimensional space
1. ree dimensional space
e world according to our first and second semester calculus
courses is flat: exceptfor a brief digression about surfaces of
revolution, everything that we discussed in Math221 and 222 took
place in the (x, y)-plane. All curves were curves in the plane and
allfunctions had graphs that were curves in the plane. is semester
we leave two dimen-sions behind and enter the three dimensional
world. In order to understand the objectswe will be dealing with,
such as curves that are free to loop around in space, or
functionswhose graphs are themselves two dimensional curved
surfaces, we will first review somethree dimensional geometry. In
particular, we will review the use of vectors in threedimensional
geometry.
2. Geometric description of vectors
2.1. Points and their coordinates. We are used to describing the
location of anypoint in the plane by choosing two perpendicular
“coordinate axes” (the x and y axes),and specifying the
corresponding (x, y)-coordinates of any given point. In the same
waywe can describe where points are in three dimensional space by
choosing three mutuallyperpendicular axes, which we call the x, y,
and z axes. To say where some given point Pis, we travel from the
origin to P , first along the x axis, then parallel to the y-axis,
andfinally parallel to the z-axis. e distances we had to go in the
x, y, and z directions arethe x, y, and z coordinates of our point
P .
y-axis
z-axis
x-axis
Figure 1. To determine the location of points in three
dimensional space (such as the center of theblue sphere in this
drawing), we should choose three coordinate axes, and specify three
numbers:the x, y, and z coordinates of the point.
5
-
6 1. VECTOR GEOMETRY IN THREE DIMENSIONAL SPACE
2.2. Vectors. While points and their coordinates are used to
described locations inspace, vectors are used to describe
displacements, i.e. how to go from one point to an-other. Such a
displacement has a size (how far we have to go), and a direction
(which waydo we go). Vectors also get used in non-geometric
situations to describe objects that havesize and direction, e.g.
velocities and forces in physics are typical examples of
vector-likeobjects.
Informal definition of “vectors”. Wewill think of a vector as an
arrow connecting twopoints. If the points areA andB then we call
the vector
# ‰
AB. If we translate a vector# ‰
AB
without turning it then we say that the resulting vector# ‰
CD is the same vector as theoriginal vector
# ‰
AB. A more precise way of saying that we should be able to move#
‰
AB“without turning,” is to insist that the line segments AB and
CD should be parallel, andhave the same length and orientation.
A
B
C
D
Figure 2. This figure contains four points (A,B,C ,D), two line
segments (AB andCD), but onlyone vector since
# ‰AB and
# ‰CD represent the same vector:
# ‰AB =
# ‰CD.
We say that the arrows# ‰
AB and# ‰
PQ both represent the same vector. Since both# ‰AB and
# ‰PQ are the same vector we will oen want to use a notation for
vectors that
does not emphasize any particular choice of initial- and
endpoint. e notation we willuse in this course is
#‰a =# ‰
AB =# ‰
PQ,
i.e., a single leer with an arrow on top will always stand for a
vector in this course.
to addtwo vectors…
…move one vectoruntil its initial point…
…is the end point ofthe other…
…and combine them.
BP
Q
BP
Q
C
B
C
B
C
A A A A
#‰a #‰a #‰a #‰a
#‰
b#‰
b#‰
b#‰
b#‰a +
#‰
b
Figure 3. Adding vectors
3. Arithmetic of vectors
To add two vectors# ‰
AB and# ‰
PQ we first translate the vector# ‰
PQ so that its initialpoint becomes B; let the result of this
translation be the vector
# ‰
BC . en, by definition,
-
4. VECTOR ALGEBRA 7
the sum of# ‰
AB and# ‰
PQ is# ‰
AC : in a formula,# ‰
AB +# ‰
PQ =# ‰
AB +# ‰
BC =# ‰
AC.
An equivalent way of adding two vectors# ‰
AB and# ‰
PQ is to move the vectors around untilthey have the same initial
point. Two vectors with a common initial point form two sidesof a
parallelogram (see Figure 4) and the sum of the two vectors is the
diagonal of thatparallelogram.
A
B
CC
D
A
B
CC
D
A
B
CC
D
A
BD
# ‰
AB +# ‰
AD =?
Figure 4. Using a parallelogram to add vectors. To find#
‰AB+
# ‰AD we move the vector
# ‰AD so
that its initial point is at B, i.e. the endpoint of# ‰AB. This
gives us a parallelogram ABCD, where
# ‰AD =
# ‰BC . Therefore
# ‰AB +
# ‰AD =
# ‰AB +
# ‰BC =
# ‰AC
One can also multiply vectors with numbers. To multiply a vector
#‰a with a positivereal number t > 0, we multiply the length of
the vector by a factor t, without changingthe direction of the
vector.
#‰a
2 #‰a
− #‰a
#‰a
#‰
b
− #‰a
− #‰b
#‰a − #‰b
#‰
b − #‰a
Figure 5. Multiplying and subtracting vectors
4. Vector algebra
e addition and multiplication of vectors and numbers satisfy a
number of alge-braic properties that should look familiar, as they
are very similar to the usual algebraicproperties for adding and
multiplying numbers. Here they are:
#‰a +#‰
b =#‰
b + #‰a commutative law
( #‰a +#‰
b ) + #‰c = #‰a + (#‰
b + #‰c ) t · (s · #‰a) = (ts) · #‰a associative laws
t · ( #‰a + #‰b ) = t #‰a + t #‰b (t+ s) #‰a = t #‰a + s #‰a
distributive laws
-
8 1. VECTOR GEOMETRY IN THREE DIMENSIONAL SPACE
5. Component representation of vectors
5.1. Components of a vector in two dimensional space. ere is a
way to representa vector by specifying a list of numbers instead of
by giving a geometric description of thevector. To do this for
vectors in the plane, we must choose two perpendicular
coordinateaxes (the “x” and “y” axes). We define
#‰e1 = vector with length 1, in the direction of the x axis#‰e2
= vector with length 1, in the direction of the y axis
en any other vector can be wrien as the sum of a multiple of
#‰e1 and another multipleof #‰e2:
(1) #‰a = a1 #‰e1 + a2 #‰e2.
See Figure 6. e numbers a1 and a2 are called the components of
the vector #‰a . If weknow the components a1 and a2 of a vector,
and if we know the two vectors #‰e1 and #‰e2,then we can
reconstruct the vector #‰a by using the formula (1).
#‰e1
#‰e2
#‰a #‰a #‰a
a1#‰e1
a2#‰e2
Figure 6. Describing a vector in terms of its components.
Instead of using the notation (1), one very oen writes
(2) #‰a =(a1a2
), or #‰a =
[a1a2
], or #‰a = ⟨a1, a2⟩.
is notation says that #‰a is the vector whose components are a1
and a2. Since the twovectors #‰e1 and #‰e2 depend on our choice of
coordinate axes, we can only use the compo-nent notation if it is
clear to everyone how we chose the coordinate axes.
e first way of writing the vector, in which the components a1
and a2 are listed in acolumn enclosed in either parentheses or
square brackets, is the standard way of writing“column vectors,”
and is used in linear algebra courses (math 320, 340, 341, etc.),
as wellas by most computational soware (MatlabTM, Octave, etc.). e
other way of writing thecomponents, i.e. as ⟨a1, a2⟩, also gets
used, especially when one has to type the equationsrather than
write them by hand.
5.2. Components of a vector in three dimensional space. e
preceding also ap-plies to vectors in three dimensional space:
instead of choosing two coordinate axes wechoose three axes, and
call them the x, y, and z axes (or, the x1, x2, and x3 axes). enwe
define #‰ı , #‰ȷ , and
#‰
k (or #‰e1, #‰e2, and #‰e3) to be vectors of length one in the
direction of
-
6. THE DOT PRODUCT 9
the three coordinate axes. A vector #‰a in space can then be
wrien as a combination ofthe three vectors #‰ı , #‰ȷ , and
#‰
k , namely,
#‰a = a1#‰ı + a2
#‰ȷ + a3#‰
k , or #‰a =
a1a2a3
.e #‰e1, #‰e2, #‰e3 notation is more systematic, but the #‰ı ,
#‰ȷ ,
#‰
k notation, which was intro-
a2#‰e2a1
#‰e1
a3#‰e3
#‰e2
#‰e3
#‰e1
The vector #‰a =
a1a2a3
is#‰a = a1
#‰e1 + a2#‰e2 + a3
#‰e3
a1a2a3
Figure 7. Components of a vector in three dimensional space
Josiah Willard Gibbs1839–1903
https://en.wikipedia.org/wiki/Josiah_Willard_Gibbs
duced into vector geometry and vector calculus by J.W.Gibbs, is
also very common.
5.3. Length of a vector whose components are given. We will
write
∥ #‰a∥
for the length of a vector #‰a . If the vector is given in
components,
#‰a = a1#‰e1 + a2
#‰e2, or #‰a = a1 #‰e1 + a2 #‰e2 + a3 #‰e3,
then the length of the vector is determined by Pythagoras’ law
(see Figures 6 and 7):
(3) ∥ #‰a∥ =√a21 + a
22, or ∥ #‰a∥ =
√a21 + a
22 + a
23.
6. e dot product
ere are two different descriptions of the dot product of two
vectors: one geometric,and the other in terms of the components of
the vectors.
6.1. Geometric description of the dot product. If #‰a and#‰
b are two given vectors,then, by definition,
θ #‰a
#‰b
The dot product betweentwo vectors.
(4) #‰a •#‰
b = ∥ #‰a∥ ∥ #‰b ∥ cos θ,
where θ is the angle between the two vectors #‰a and#‰
b .
https://en.wikipedia.org/wiki/Josiah_Willard_Gibbshttps://en.wikipedia.org/wiki/Josiah_Willard_Gibbs
-
10 1. VECTOR GEOMETRY IN THREE DIMENSIONAL SPACE
6.2. e dot product in terms of vector components. If we choose
an orthonormalset of vectors #‰e1, #‰e2, #‰e3, and write
#‰a = a1#‰e1 + a2
#‰e2 + a3#‰e3 =
a1a2a3
, #‰b = b1 #‰e1 + b2 #‰e2 + b3 #‰e3 =b1b2b3
,then
(5) #‰a •#‰
b = a1b1 + a2b2 + a3b3.
e fact that (4) and (5) always give the same result is not
obvious (the formulas look verydifferent), and requires a proof. A
very common proof relies on the law of cosines (it wasgiven in math
222 – see also Problem 12.10)
6.3. Algebraic properties of the dot product. e dot product has
the followingalgebraic properties, which we will use very oen
throughout this course:
#‰a •#‰
b =#‰
b • #‰a commutative
s( #‰a •#‰
b ) = (s #‰a) •#‰
b associative
( #‰a +#‰
b ) • #‰c = #‰a • #‰c +#‰
b • #‰c . distributive
We will not prove these properties here. Proofs can be given if
one starts either fromthe algebraic description of the dot-product
(5), or from the geometric description (4) (al-though the
distributive property is more difficult to prove from the geometric
descriptionthan from the algebraic description.)
e sign of the dot product tells us if the angle between two
vectors is acute, obtuse,or if the vectors are perpendicular:
#‰a ⊥ #‰b ⇐⇒ #‰a • #‰b = 0(6a)#‰a •
#‰
b > 0 ⇐⇒ θ < π2
(6b)
#‰a •#‰
b < 0 ⇐⇒ θ > π2.(6c)
7. e cross product
As with the dot product, the cross product of two vectors also
has a geometric de-scription, and a description in terms of
components.
7.1. Geometric description of the cross product. Let #‰a
and#‰
b be two vectors inthree dimensional space, then their cross
product is the vector #‰a× #‰b that satisfies
• #‰a× #‰b is perpendicular to #‰a , and also to #‰b• the length
of #‰a× #‰b is given by
∥ #‰a× #‰b ∥ = ∥ #‰a∥ ∥ #‰b ∥ sin θ,
where θ is the angle between the vectors #‰a and#‰
b ,• the three vectors #‰a , #‰b , #‰a× #‰b satisfy the right
hand rule: if on your right hand
#‰a is the index finger and#‰
b is the middle finger, then your thumb points in thedirection
of #‰a× #‰b . See Figure 8.
-
7. THE CROSS PRODUCT 11
#‰a
#‰
b
#‰a× #‰b
#‰a
#‰
b
#‰a× #‰b
Figure 8. The cross product: #‰a× #‰b is perpendicular to both
#‰a and #‰b ; its direction follows fromthe right-hand rule.
e length of the cross product of two vectors has a geometric
interpretation. Namely,the quantity ∥ #‰a∥ ∥ #‰b ∥ sin θ is exactly
the are of the parallelogram spanned by the vectors#‰a and
#‰
b .
height = ∥ #‰a∥ sin θ
base = ∥ #‰b ∥
#‰a
θ
Area=height×base
#‰
b
7.2. Algebraic description of the cross product. If #‰a
and#‰
b are given by (4), i.e. by
#‰a = a1#‰e1 + a2
#‰e2 + a3#‰e3 =
(a1a2a3
),
#‰
b = b1#‰e1 + b2
#‰e2 + b3#‰e3 =
(b1b2b3
),
then
#‰a× #‰b =
a2b3 − a3b2a3b1 − a1b3a1b2 − a2b3
.7.3. Algebraic properties of the cross product. e cross product
has the distribu-
tive property, namely,
(7) ( #‰a +#‰
b )× #‰c = #‰a× #‰c + #‰b× #‰c ,
holds true for any three vectors #‰a ,#‰
b , #‰c .
e cross product is not commutative: #‰a× #‰b and #‰b× #‰a are
not the same thing.Instead, we have :
(8) #‰a× #‰b = − #‰b× #‰a .
Because of this property the cross product is said to be
“anti-commutative.”
-
12 1. VECTOR GEOMETRY IN THREE DIMENSIONAL SPACE
e associative property fails completely for the cross product:
for most vectors #‰a ,#‰
b , #‰c one has
(9)
( #‰a× #‰b )× #‰c ̸= #‰a×( #‰b× #‰c )
If you need a vector that is perpendicular to two given vectors,
take their cross prod-uct.
e length of the cross product #‰a× #‰b is the area of the
parallelogram spanned bythose vectors.
8. e triple product
Just as two vectors in the plane form a parallelogram, three
vectors in space willform a shape called a parallelepiped. By
definition, a parallelepiped is a solid body eachof whose faces is
a parallelogram.
θ
#‰a
#‰c
#‰
b
#‰
b× #‰c
height
θ
#‰a#‰
b#‰c
#‰
b× #‰c
height
Figure 9. A parallelepiped spanned by three vectors #‰a ,#‰
b , #‰c . Since the base of the paral-lelepiped is a
parallelogram with edges
#‰
b and #‰c , we haveArea of base = ∥ #‰b× #‰c ∥.
The height of the parallelepiped is ∥ #‰a∥ cos θ, and therefore
the volume is given byVolume = height · area of base = ∥ #‰a∥ ∥
#‰b× #‰c ∥ cos θ = #‰a •
( #‰b× #‰c
).
This derivation applies to the situation on the le, where the
vector #‰a and the cross product#‰
b× #‰cpoint in the same direction. If these vectors form an
obtuse angle, as is the case on the right, thencos θ < 0, and
the height is −∥ #‰a∥ cos θ. In that case one has
Volume = height · area of base = −∥ #‰a∥ ∥ #‰b× #‰c ∥ cos θ = −
#‰a •( #‰b× #‰c
).
If we are given three vectors #‰a ,#‰
b , and #‰c , then the volume of the parallelepiped
theydetermine is given by the formula
“Volume equals Area of base times height”
In terms of the three vectors this is
(10) V =∣∣∣ #‰a • ( #‰b× #‰c )∣∣∣ .
A derivation is sketched in Figure 9. e quantity #‰a • (#‰
b× #‰c ) (without the absolutevalues) is called the triple
product of the three vectors #‰a ,
#‰
b , and #‰c . Apart from its usein computing the volume of a
parallelepiped, the triple product appears in many other
-
10. DETERMINANTS, THE TRIPLE PRODUCT, AND THE CROSS PRODUCT
13
contexts. At first sight the expression #‰a • (#‰
b× #‰c ) suggests that the order in which thevectors appear is
important, but this turns out not to be true. One has
#‰a •( #‰b× #‰c
)=
#‰
b •(
#‰c× #‰a)= #‰c •
(#‰a× #‰b
)for any #‰a ,
#‰
b , #‰c .
9. Determinants
For any four numbers a, b, c, d, one defines the 2× 2
determinant to be
(11)
∣∣∣∣ a bc d∣∣∣∣ = ad− bc .
One can also define 3 × 3 determinants. Namely, for any nine
numbers a1, . . . , c3 onedefines
(12)
∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ = a1b2c3 − a1b3c2 − a2b1c3 + a2b3c1 + a3b1c2 − a3b2c1 .is
can be wrien as∣∣∣∣∣∣
a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ = a1(b2c3 − b3c2)− a2(b1c3 − b3c1)+ a3(b1c2 − b2c1)(13)=
a1
∣∣∣∣ b2 c2b3 c3∣∣∣∣− a2 ∣∣∣∣ b1 c1b3 c3
∣∣∣∣+ a3 ∣∣∣∣ b1 b1b2 b2∣∣∣∣
where each coefficient in the first row is multiplied with the
2×2 determined that remainsaer one deletes the row and column
containing the coefficient.
Instead of expanding along the first row one can also expand
along the first column:
(14)
∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ = a1∣∣∣∣ b2 c2b3 c3
∣∣∣∣− b1 ∣∣∣∣ a2 c2a3 c3∣∣∣∣+ c1 ∣∣∣∣ a2 b2a3 b3
∣∣∣∣Many other mnemonic devices exist to remember how to compute
a 3 × 3 determinant.A popular trick is “Sarrus’ rule” (see Figure
10.)
One can also define larger determinants, i.e. 4 × 4, 5 × 5, etc,
and generally n × ndeterminants. e theory, which is beyond the
scope of this course, is treated in linearalgebra courses such as
Math 320, 340, or 341.
10. Determinants, the triple product, and the cross product
If the numbers a1, . . . , c3 in a determinant happen to be the
components of threevectors #‰a ,
#‰
b , #‰c , i.e. if
#‰a =
a1a2a3
, #‰b =b1b2b3
, #‰c =c1c2c3
,then the corresponding determinant is exactly the triple
product:
(15)
∣∣∣∣∣∣a1 b1 c1a2 b2 c2a3 b3 c3
∣∣∣∣∣∣ = #‰a • ( #‰b× #‰c ).
-
14 1. VECTOR GEOMETRY IN THREE DIMENSIONAL SPACE
a1 a2 a3 a1 a2
+ + +---
b1 b2 b3 b1 b2
c1 c2 c3 c1 c2
a1b2c3 a2b3c1 a3b1c2a3b2c1 a1b3c2 a2b1c3
Figure 10. Computing 3 × 3 determinants. There are several
shortcuts to remember howto compute a 3 × 3 determinant. Pictured
here is “Sarrus’ rule,” which tells us to copy the firsttwo columns
of the determinant to the right of the determinant, and read off
the six terms in thedeterminant by following the diagonals.
Related to this is the following practical trick for computing
the cross product of twocolumn vectors. Given two column
vectors
#‰
b and #‰c one can write their cross product asb1b2b3
×c1c2c3
=∣∣∣∣∣∣
#‰e1 b1 c1#‰e2 b2 c2#‰e3 b3 c3
∣∣∣∣∣∣=
∣∣∣∣ b2 c2b3 c3∣∣∣∣ #‰e1 − ∣∣∣∣ b1 c1b3 c3
∣∣∣∣ #‰e2 + ∣∣∣∣ b1 b1b2 b2∣∣∣∣ #‰e3.
e 3 × 3 determinant in this equation is unusual in that some of
its entries are vectorsinstead of numbers. e intention of this
notation is that one expand the determinantalong the first column,
as in (13) and then interpret the result as a vector.
11. Defining equations for lines and planes
11.1. Lines. Let ℓ be a line in the plane, and suppose we know
one point A on theline, and that we also have a vector #‰n that is
perpendicular to the line (and we exclude#‰n =
#‰0 .) Such a vector is called a normal vector to the line.
Given any other pointX in
the plane we can form the vector# ‰
AX and consider its dot-product with the normal. Wehave
#‰n •# ‰
AX = ∥ #‰n∥ ∥ # ‰AX∥ cos θ,
where θ is the angle between the normal vector #‰n and# ‰
AX .
e combination ∥ # ‰AX∥ cos θ is, up to its sign, the distance
from the line ℓ to thepoint X : If X lies on the side of ℓ at which
the normal vector points then #‰n •
# ‰
AX > 0; ifX lies on the other side then #‰n •
# ‰
AX < 0. We therefore have the following formula forthe
distance between a point X and the line ℓ:
(16) d =#‰n •
# ‰
AX
∥ #‰n∥When we use this equation to compute the distance from X
to ℓ, it is good to recall thatif #‰x = ( x1x2 ) and
#‰a = ( a1a2 ) are the position vectors of the points X and A,
then
# ‰
AX = #‰x − #‰a =(x1 − a1x2 − a2
).
-
11. DEFINING EQUATIONS FOR LINES AND PLANES 15
X
A
ℓ
d
θ#‰n
XA
ℓ
d
θ#‰n
π − θ
#‰n •# ‰
AX < 0d = ∥ # ‰AX∥ cos(π − θ)
= −∥ # ‰AX∥ cos θ#‰n •# ‰AX > 0 d = ∥ # ‰AX∥ cos θ
Moreover, the length of the normal vector is ∥ #‰n∥ =√
n21 + n22, so we can rewrite (16) as
d =n1(x1 − a1) + n2(x2 − a2)√
n21 + n22
.
is last formula is more impressive than (16), but it is beer to
remember (16).
e equation for the distance from any point X to a given line ℓ
is also importantbecause it gives us the defining equation for the
line ℓ. e defining equation is anequation that tells us for any
given pointX in the plane if that point is on the line or not.Since
X is on ℓ exactly when the distance from ℓ to X vanishes, it
follows from (16) thatX is on ℓ if and only if
(17) #‰n •# ‰
AX = 0.
We can again rewrite this equation in a few different ways. If
we want to write it in termsof the position vectors of A and X ,
then we get
#‰n •(
#‰x − #‰a)= 0, i.e.: #‰n • #‰x = #‰n • #‰a .
Wrien without vectors, but in terms of the coordinates of the
points A, X , and thecomponents of the normal vector #‰n, we can
write this last version of our equation as
n1x1 + n2x2 = n1a1 + n2a2.
11.2. Planes. We can repeat the derivation of the distance from
a point to a line inthe plane and derive a formula for the distance
from a point in three dimensional spaceto a given plane. e drawings
are harder to make (at first only, practice makes perfect!),but the
resulting formulas are the same.
e distance from a point X to a plane P is given by equation
(16), where #‰n is anormal vector to the plane (a vector that is
perpendicular to the plane), and A is somepoint on the plane that
we happen to know.
-
16 1. VECTOR GEOMETRY IN THREE DIMENSIONAL SPACE
A
X
#‰n
θd
d = ∥ # ‰AX∥ cos θ#‰n •
# ‰
AX = ∥ #‰n∥ ∥ # ‰AX∥ cos θ
12. Problems
1. Explain how you can use the dot prod-uct to find the angle
between the vectors#‰a = 2 #‰ı − 3 #‰ȷ , and #‰b = #‰ȷ + #‰k .
2. For which value(s) of the number s arethe vectors
#‰a =
(s
1− s
)and
#‰
b =
(23
)perpendicular? For which values of s do theymake an acute
angle? •
3. Figure 11 shows a cube whose sides havelength 1.
Choose A to be the origin, and let the x,y, and z axes be along
the sides AB, AD,and AE, respectively.
(a) Draw the vectors #‰e1, #‰e2, and #‰e3 in thefigure.
(b) Find a normal vector to the planethrough the points B, D,
and E.
(c) Draw the plane through ACH (or atleast the portion of that
plane that lies in-side the cube). Find a normal to the planeACH
.
(d) Find the angle between the two planesBDE and ACH . (The
angle between twoplanes is the same as the angle between
theirnormal vectors, i.e. to find the angle betweentwo planes find
a normal vector for each of
the planes and compute the angle betweenthese two vectors.)
(e) Find the angle between the two planesBDE and HFC .
4. (a) Draw two vectors #‰a and#‰
b for which#‰a has length 3,
#‰
b has length 5, and forwhich #‰a •
#‰
b = −12. How many solutionsare there? •(b)Can there be two
vectors #‰a and
#‰
b whoselengths are ∥ #‰a∥ = 3 and ∥ #‰b ∥ = 5, andwhose inner
product is #‰a •
#‰
b = 25? •
5. Compute#‰a = ( #‰ı× #‰ȷ )× #‰ȷ and #‰b = #‰ı×( #‰ȷ× #‰ȷ
).What does your answer say about the asso-ciative property for the
cross product? (See§ 7.3.)
What about#‰c = ( #‰ı× #‰ȷ )× #‰k and #‰d = #‰ı×( #‰ȷ× #‰k
)?
6. Which of the following vector equationsare true for any pair
of vectors #‰a and
#‰
b ? Ei-ther give a proof (using the algebraic prop-erties or the
algebraic or geometric descrip-tions).
(a) ( #‰a +#‰
b ) • ( #‰a − #‰b ) = ∥ #‰a∥2 −∥ #‰b ∥2 ? •(b) If #‰a ⊥ #‰b
then
∥ #‰a + #‰b ∥2 = ∥ #‰a∥2 + ∥ #‰b ∥2 ? •(c) If #‰a ⊥ #‰b then
∥ #‰a − #‰b ∥2 = ∥ #‰a∥2 − ∥ #‰b ∥2 ? •
-
12. PROBLEMS 17
A
B
C
D
E FGH
Figure 11. Figure for problem 12.3
7. True or False:(a) If #‰a ⊥ #‰b and also #‰b ⊥ #‰c then #‰a ⊥
#‰c?
(b) If #‰a ⊥ #‰b and also #‰a ⊥ #‰c then #‰a ⊥(
#‰
b + #‰c ) ?
(c) If #‰a ⊥ #‰b and also #‰b ⊥ #‰c then #‰b ⊥( #‰a − #‰c ) ?(d)
If #‰a ⊥ #‰b + #‰c and also #‰a ⊥ #‰b − #‰c then#‰a ⊥ #‰b ?
8. Simplify the following expressions
(a) ( #‰a +#‰
b )×( #‰a + #‰b ) •(b) ( #‰a +
#‰
b + #‰c )×( #‰a + #‰b + #‰c ) •(c) ( #‰a +
#‰
b + #‰c )×( #‰a + #‰b + #‰c ) •(d) ( #‰a +
#‰
b − #‰c )×( #‰a − #‰b + #‰c )(e) ( #‰a +
#‰
b − #‰c ) • ( #‰a − #‰b + #‰c )
9. This problem is about “cross division,”i.e. can you solve
#‰a× #‰b = #‰c for #‰b if youknow #‰a and #‰c ?
(a) Let#‰a = #‰e1 − #‰e3, #‰c = #‰e1 + 3 #‰e2 + 2 #‰e3.
Find a vector#‰
b for which #‰a× #‰b = #‰c , ifthere is such a thing. (Hint: if
#‰c = #‰a× #‰b ,then what do you know about #‰a • #‰c ?) •
(b) Let #‰a = 2 #‰e1− #‰e3, and #‰c = #‰e1+3 #‰e2+2 #‰e3. Find a
vector
#‰
b for which #‰a× #‰b = #‰c ,if such a thing exists. •
10. The law of cosines says that in a triangle△ABC for which you
know the sides ABandAC , as well as the angle ∠A, the lengthof the
opposing side BC is given by
(BC)2 = (AB)2 + (AC)2
− 2(AB)(AC) cos∠A.
Show how you can use the dot product to(re)prove this law.
Hint: consider the vector equation# ‰BC =
# ‰AC − # ‰AB. You will need both the
geometric description (4) of the dot product,and the algebraic
properties from § 6.3.
-
CHAPTER 2
Parametric curves and vector functions
1. Vector functions
So far in calculus we have only considered functions y = f(x)
where both the inde-pendent variable x and the dependent variable y
are real numbers.
A vector function is a function of one variable whose values are
vectors instead ofnumbers. One way to specify a vector function is
to say what its components are:
#‰x(t) =
x(t)y(t)z(t)
= x(t) #‰e1 + y(t) #‰e2 + z(t) #‰e3.2. Using vector functions to
describe motion
One way to visualize a vector function #‰x(t) is to think of the
vector #‰x(t) for anygiven value of t as the position vector of
some point in space (or the plane, if #‰x(t) is a two-dimensional
vector). In other words, we represent the vector #‰x(t) as an arrow
startingat the origin, and ending at some point X(t) whose
coordinates are (x(t), y(t), z(t)):
#‰x(t) =# ‰
OX(t).
As t varies, the point X(t) moves around and traces out a curve.
Such a curve is called aparametrized curve, or a parametric curve.
e quantity t is called the parameter.
We will now take a look at some examples of parametric
curves.
#‰x(t)
O
X(t)
Figure 1. A parametric curve: as the parameter t changes, the
vector #‰x(t)will also move. Keep-ing the initial point of the
vector #‰x(t) at the origin O, the endpoint X(t) traces out a space
curve.
19
-
20 2. PARAMETRIC CURVES AND VECTOR FUNCTIONS
3. Lines
Consider the parametric curve given by
(18) #‰x(t) = #‰a + t #‰v
where #‰a and #‰v are given constant vectors. As before we let
X(t) be the point with#‰x(t) =
# ‰
OX(t), i.e. #‰x(t) is the position vector of the point X(t), and
as t changes, X(t)traces out the parametric curve.
To see what the parametric curve looks like, we let A be the
point with# ‰
OA = #‰a ,then, since
# ‰
OX(t) =# ‰
OA+# ‰
AX(t),
it follows from (18) that# ‰
AX(t) = t #‰v . Now consider going from the origin O to thepoint
X(t) in two steps: first move from O to the point A, then go from A
to X(t). edisplacement in the second step is
# ‰
AX(t) = t #‰v . Changing t will then make the pointX(t) slide
along the line through the point A in the direction of #‰v .
#‰a#‰v
#‰x(t) = #‰a + t #‰v
X(t)
Origin
A
t #‰v
Figure 2. Vector form of linear motion given by #‰x(t) = #‰a + t
#‰v .
We say that #‰x(t) given by (18) describes motion with constant
velocity, whose ve-locity vector is #‰v .
4. Circular motion
For given constants R > 0 and ω we consider the vector
function
(19) #‰x(t) = R cosωt #‰e1 +R sinωt #‰e2 =(R cosωtR sinωt
).
e corresponding point is X(t) =(R cosωt,R sinωt
). It lies on the circle of radius R
with center at the origin, and the angle subtended by OX(t) and
the positive x-axis isexactly ωt.
If ω > 0 then as t increases, the angle ωt increases and the
point X(t) goes aroundthe circle in counter-clockwise direction.
Ifω < 0 thenX(t) goes around in the clockwisedirection.
e number ω is the rate of increase of the angle ωt, and is
called the angular ve-locity of the motion.
-
6. THE HELIX 21
#‰x(t)ωt
X(t)
O
Figure 3. Circular motion with angular velocity ω.
5. e cycloid
e cycloid is the curve we get if we put a (bicycle) wheel on the
ground, markthe point on the tire that touches the ground, and
follow this point as we roll the wheelforward. If we call the point
X , then it depends on the angle θ that the wheel has turnedsinceX
was on the ground. Figure 4 provides a derivation of the vector
function #‰x(θ) =# ‰
OX(θ) that describes the cycloid. e result is
(20) #‰x(θ) =(Rθ −R sin θR−R cos θ
).
X
C
B
AO
θθ
θ
O AA
CC
X
X
Figure 4. The cycloid. A wheel of radius R rolls over the
x-axis. Initially the wheel touches thex-axis at the origin O. The
cycloid is the curve traced out by a point X on the wheel.
Derivation of the cycloid motion. The arc AX and the line
segment OA have the samelength. Since AX has length Rθ, the x
coordinates of the points A, B, and C are Rθ. The righttriangle CXB
has hypotenuse R, so the lengths of XB and CB are R sin θ, and R
cos θ, respec-tively. Therefore the coordinates of the point X are
x = Rθ −R sin θ, and y = R−R cos θ.
6. e helix
When we walk up a spiral staircase we are tracing out a helix:
we are going aroundin circles, and moving upward at the same time.
e parametric curve that does this (and
-
22 2. PARAMETRIC CURVES AND VECTOR FUNCTIONS
that has the z-axis as its central axis) is given by
(21) #‰x(θ) =
R cos θR sin θaθ
or: #‰x(θ) = R cos θ #‰e1 +R sin θ #‰e2 + aθ #‰e3.Here R > 0
is the radius of the helix, i.e. the radius of the circle on the
ground abovewhich the helix lies; the number a represents the rate
at which the helix goes up.
x y
z
θ
aθ
X
O
YA
Figure 5. The Helix. The point X traces out a helix: it sits at
a height aθ above the point Y ,while Y runs around on a circle of
radius R; here θ = ∠AOY
7. e derivative of a vector function
For a function y = f(x) of one variable we had twoways of
describing the derivative:on one hand we had a geometric
description of f ′(x) as “the slope of the tangent to thegraph,”
and on the other we could describe f ′(x) in terms of a difference
quotient, i.e.
f ′(x) = lim∆x→0
f(x+∆x)− f(x)∆x
.
For vector functions we can imitate both descriptions. We begin
with the formal def-inition in terms of limits and then proceed to
the geometric description, in which weinterpret the derivative as
the “instantaneous velocity vector.”
Definition. If #‰x(t) is a vector function, then we set
(22) #‰x ′(t) def= lim∆t→0
#‰x(t+∆t)− #‰x(t)∆t
.
For (22) to make sense we would have to define what the limit of
a vector function is.is can be done, but we will not go into the
precise definitions in this course. More
-
8. THE DERIVATIVE AS VELOCITY VECTOR 23
important for our use is that if the components of a vector
function #‰x(t) are given, thenthe derivative can be computed by
just differentiating those components:
(23) #‰x ′(t) =
x′(t)y′(t)z′(t)
, or #‰x ′(t) = x′(t) #‰e1 + y′(t) #‰e2 + z′(t) #‰e3.As with
ordinary functions of one variable we will use Leibniz’ notation
for the derivativewhenever it seems convenient. us the following
are equivalent ways of expressing thesame derivative:
#‰a ′(t) =d #‰a(t)
dt=
d
dt#‰a(t).
Example. For instance,
#‰x(θ) =
cos θ0θ
= cos θ #‰e1 + θ #‰e3defines a vector function. Here we have
called the independent variable θ instead of t.e derivative of this
vector function is
d #‰x
dθ=
d
dθ
cos θ0θ
=− sin θ0
1
= − sin θ #‰e1 + #‰e3.8. e derivative as velocity vector
Suppose the motion of some point X(t) in space is described by
its position vectorfunction #‰x(t). Let us try to define the
instantaneous velocity of the point. is velocityshould have
magnitude (“how fast the point is moving”) and also direction
(“which way
Δx
v = dx/dt
x(t)x(t+
Δt)
X(t)
O
Figure 6. The vector function #‰x(t) traces out a curve in
space. The vector #‰x(t) is the positionvector of a point X(t) on
this curve. As we increase time from t to t+∆t, the point X(t)
moves.The displacement of the point X(t) is given by ∆ #‰x = #‰x(t
+ ∆t) − #‰x(t). The average velocityvector during this displacement
is “displacement/time”, i.e. ∆ #‰x/∆t.
If we let ∆t → 0, then the average velocity becomes the
instantaneous velocity at time t:#‰v = lim∆t→0 ∆ #‰x/∆t = #‰v ′(t).
This vector is tangent to the curve traced out by the
vectorfunction #‰x(t). We call it a tangent vector.
-
24 2. PARAMETRIC CURVES AND VECTOR FUNCTIONS
is the point going?”). e velocity should therefore be a vector.
To see which vector, wego back to the notion that “velocity” is
always “displacement divided by time.”
We consider two instances in time, say, time t and time t+∆t. en
the position vec-tors of the pointX at these two different times
are #‰x(t) and #‰x(t+∆t). e displacementof the point X between
these two times is then
∆ #‰x = #‰x(t+∆t)− #‰x(t)
(see Figure 6.) We say that the average velocity over the time
interval from t to t+∆t is“the displacement divided by ∆t,”
i.e.
#‰v average =#‰x(t+∆t)− #‰x(t)
∆t.
Note that the average velocity is a vector. If we write it out
in components, we get a muchlarger formula:
#‰v average =
x(t+∆t)− x(t)∆t
y(t+∆t)− y(t)∆t
z(t+∆t)− z(t)∆t
.One big advantage of using vector notation is that many
formulas simplify considerablywhen wrien in terms of vectors.
To get the instantaneous velocity, we do the same thing as in
one variable calculus:we take the limit as∆t → 0 of the average
velocity over the time interval from t to t+∆t.us we get
(24) #‰v (t) = lim∆t→0
#‰x(t+∆t)− #‰x(t)∆t
def=
d #‰x
dt.
In terms of components this derivative is
#‰x ′(t) =d #‰x
dt=
x′(t)y′(t)z′(t)
.us the velocity vector of any given vector function #‰x(t) is
the same as the derivativeof this vector function.
9. Acceleration
Having found the velocity vector of a point X(t) whose position
vector is a givenvector function
# ‰
OX(t) = #‰x(t), we can also define the acceleration vector of
themovingpoint. By definition, the acceleration vector is the
derivative of the velocity vector, i.e.
(25) #‰a(t) =d #‰v
dt=
d2 #‰x
dt2=
x′′(t)y′′(t)z′′(t)
.is definition is entirely analogous to the definition of
acceleration (“a = dvdt ”) from firstsemester calculus. e only
difference is that, here, the position, velocity, and
accelerationall have directions in addition to magnitudes: they are
vectors.
-
10. THE DIFFERENTIATION RULES 25
Newton’s famous law relating forces and acceleration continues
to hold. If a pointX(t) moves according to some vector function
#‰x(t), then some force must be actingon this point. is force is a
vector (it has magnitude and direction), and, according toNewton,
it is given by
(26)#‰
F = m #‰a = md #‰v
dt= m
d2 #‰x
dt2,
where m is the mass of the object at the point X(t) whose motion
we are considering. Itis always assumed to be a positive
number.
Note that according to this law, the absence of forces,
i.e.#‰
F =#‰0 , is the same as
d #‰vdt =
#‰0 , i.e. no force acts on the point if and only if its
velocity vector is constant. Here
“constant” means constant magnitude and constant direction.
10. e differentiation rules
Just as with ordinary derivatives, the derivatives of vector
functions satisfy certainrules, such as the product rule. e purpose
of these rules is not the same as in one variablecalculus. ere we
used sum, product, quotient and chain rules to compute
derivativesof given functions without having to fall back on the
definition of a derivative all thetime. For vector functions we do
not need such rules, because we can differentiate themby simply
differentiating each of their components (see the above example).
Instead, thedifferentiation rules for vector functions are mostly
used to gain insight and establishgeneral facts about vector
functions, a number of which we will see shortly.
10.1. e sum rule. e analog of the sum rule (“derivative of the
sum is the sum ofthe derivatives”) looks exactly like the ordinary
sum rule. It says that for any two vectorfunctions #‰a(t) and
#‰
b (t) one has
d
dt
(#‰a(t)± #‰b (t)
)=
d #‰a(t)
dt± d
#‰
b (t)
dt.
10.2. emany product rules. ere is no quotient rule for vector
functions, simplybecause we have no way of dividing vectors. On the
other hand we have two ways ofmultiplying vectors, and we can also
multiply vectors and numbers, so there are threedifferent product
rules. Fortunately they all look like the product rule from first
semestercalculus.
If #‰a(t) and#‰
b (t) are vector functions, and if f(t) is a function, then
d #‰a(t) •#‰
b (t)
dt=
d #‰a(t)
dt•
#‰
b (t) + #‰a(t) •d
#‰
b (t)
dt
d #‰a(t)× #‰b (t)dt
=d #‰a(t)
dt× #‰b (t) + #‰a(t)×d
#‰
b (t)
dt
d f(t) #‰a(t)
dt=
df(t)
dt#‰a(t) + f(t)
d #‰a(t)
dt
In spite of the fact that these rules “look right,” they could
still be wrong, so to be surewe would have to prove them. e proofs
are very straightforward. Here is a short proof
-
26 2. PARAMETRIC CURVES AND VECTOR FUNCTIONS
for the product rule involving the dot product. To shorten the
formulas we omit the “(t)”from all functions:
d #‰a •#‰
b
dt=
d
dt
(a1b1 + a2b2
)=
da1b1dt
+da2b2dt
=da1dt
b1 + a1db1dt
+da2dt
b2 + a2db2dt
ordinary product rule
=da1dt
b1 +da2dt
b2 + a1db1dt
+ a2db2dt
switch terms around
=d #‰a
dt•
#‰
b + #‰a •d
#‰
b
dt. recognize the dot-products
11. Vector functions of constant length
As an immediate application of the product rule for the
dot-product we prove thefollowing fact about vector functions whose
length does not change, i.e. vector functions#‰a(t) that change
their direction, but not their length.
#‰a(t)
∆ #‰a#‰a(t+∆t)
If a vector function #‰a(t) hasconstant length, then, when
theparameter t undergoes a smallchange ∆t, the correspondingsmall
change ∆ #‰a in the vectorfunction will be almost perpendic-ular to
#‰a(t) itself.
eorem. Let #‰a(t) be a vector function. en a necessary and
sufficient condition forthe length ∥ #‰a(t)∥ to be constant is that
#‰a(t) and #‰a ′(t) be perpendicular for all t.
P. Differentiating both sides of the equation
∥ #‰a(t)∥2 = #‰a(t) • #‰a(t)
we get
(27)d
dt∥ #‰a(t)∥2 = #‰a ′(t) • #‰a(t) + #‰a(t) • #‰a ′(t) = 2 #‰a(t)
• #‰a ′(t).
If #‰a(t) has constant length, then ∥ #‰a(t)∥2 is also constant,
and thus ddt∥#‰a(t)∥2 = 0.
erefore, for a vector function #‰a(t)whose length is constant,
#‰a(t) • #‰a ′(t) = 0, i.e. #‰a(t) ⊥#‰a ′(t).
Conversely, if #‰a(t) is a vector function for which #‰a(t) ⊥
#‰a ′(t) holds for all t, then#‰a(t) • #‰a ′(t) = 0, and (27)
implies that ddt∥
#‰a(t)∥2 = 0, i.e. that ∥ #‰a(t)∥2 and hence ∥ #‰a(t)∥are
constant.
□
-
12. TWO EXAMPLES 27
12. Two examples
12.1. Motion on a straight line. We return to the motion given
by (18), i.e.
(28) #‰x(t) = #‰a + t #‰v .
e velocity and acceleration are easy to compute:
d #‰x(t)
dt= #‰v ,
d2 #‰x(t)
dt=
d #‰v
dt=
#‰0 ,
since #‰v is a constant vector in this case.
We see that if a point X(t) moves according to the
parametrization (18), then itsvelocity is constant, and its
acceleration is zero. According to Newton’s law, no force isexerted
on an object undergoing this motion.
12.2. Circular motion. For the point X(t) moving on a circle of
radius R with an-gular velocity ω we have (19), i.e.
#‰x(t) = R cosωt #‰e1 +R sinωt #‰e2
so that the velocity and acceleration are easy to compute:
#‰v (t) = #‰x ′(t) = −ωR sinωt #‰e1+ ωR cosωt #‰e2,#‰a(t) = #‰v
′(t) = −ω2R cosωt #‰e1− ω2R sinωt #‰e2.
Note that the velocity vector #‰v (t) is perpendicular to the
position vector #‰x(t), aspredicted in § 11. Our expression for the
velocity vector #‰v (t) contains the familiar re-lation between
angular velocity and velocity: the velocity v = ∥ #‰v (t)∥ with
which thepoint X(t) is moving is
v(t) = ∥−ωR sinωt #‰e1 + ωR cosωt #‰e2∥(29)
=√ω2R2 sin2 ωt+ ω2R2 cos2 ωt
= ωR.
Hence the angular velocity of an object undergoing circular
motion is
(30) ω =v
R.
#‰
F#‰v (t) ωt R
X
Figure 7. If an objectmoves along a circle with constant angular
velocity, then the force#‰F required
to make the object follow that motion is#‰F = −ω2 #‰x . In
particular it is parallel to the position
vector #‰x but in the opposite direction.
-
28 2. PARAMETRIC CURVES AND VECTOR FUNCTIONS
We also note that the acceleration is a multiple of the position
vector:#‰a(t) = −ω2 #‰x(t).
According to Newton the force acting on the object atX(t)
is#‰
F = m #‰a = −mω2 #‰x , andits magnitude is
(31) F = ∥ #‰F ∥ = ∥mω2 #‰x(t)∥ = mω2R,because ∥ #‰x(t)∥ = R at
all times.
Using (30) we can replace the angular velocity ω by the actual
velocity, which leadsto the classical formula for the centrifugal
force
(32) F =mv2
R.
13. Arc length
For any given vector function there is a simple formula for the
length of the curveit traces out. e formula is essentially the same
as the formula for the length of a para-metric curve (or, to a
lesser extent, of the graph of a function) that was described in
Math221. Here we repeat the intuitive derivation of the formula,
wrien in terms of vectorsthis time.
Let #‰x(t) (a ≤ t ≤ b) be a vector function. To determine the
length of the arc tracedout by X(t) as t varies from t = a to b, we
divide the interval a ≤ t ≤ b into manyvery short subintervals. e
corresponding points X(t) on the curve split the curve intomany
short segments, each of which will be “close to a line segment.” We
approximatethe length of the curve by adding the lengths of all
these short segments. Finally we takethe limit in which the number
of partition points becomes infinite and our sum of lengthsof short
segments becomes an integral. To see which integral we get, we need
to find anexpression for the length of a short segment between two
adjacent partition points onthe curve.
Suppose we have two points on the curve, with parameter values t
and t + ∆t, re-spectively. e points are X(t) and X(t + ∆t), and the
distance between them is thelength of the vector ∆ #‰x from one
point to the next. is vector is
Δx start(t=a)
end(t=b)
partition piece
X(t)
X(t+Δt)
∆x = #‰x(t+∆t)− #‰x(t) =#‰x(t+∆t)− #‰x(t)
∆t∆t ≈ #‰x ′(t)∆t,
so that its length is ≈ ∥ #‰x ′(t)∥∆t. Adding the lengths of the
short segments together,we find that the length is
approximately
∑∥ #‰x ′(t)∥∆t (where the summation is over all
short pieces of the curve). Taking the limit we arrive at this
formula for the length of thecurve traced out by #‰x(t), a ≤ t ≤
b:
(33) Length =∫ bt=a
∥ #‰x ′(t)∥ dt.
is integral looks simple, but that appearance turns out to be
deceptive as we findout when we write it in terms of the components
of the vector function #‰x(t). Suppose#‰x(t) = x(t) #‰e1 + y(t)
#‰e2 + z(t)#‰e3. en
#‰x ′(t) = x′(t) #‰e1 + y′(t) #‰e2 + z
′(t) #‰e3,
so that∥ #‰x ′(t)∥ =
√x′(t)2 + y′(t)2 + z′(t)2.
-
14. ARC LENGTH DERIVATIVE 29
erefore the length formula (33) of the curve is equivalent
to
(34) Length =∫ bt=a
√x′(t)2 + y′(t)2 + z′(t)2 dt.
e square root makes this formula a reliable source of very
difficult integrals. In fact thelist of curves whose length one can
actually compute by doing the integral is rather short(see Problem
…).
14. Arc length derivative
Let #‰x(t) be some vector function that describes the motion
through space of somepoint X(t), and let f(t) be some other
function. In what follows it will help to think ofthe parameter t
as “time.” Typical examples of functions f that wemight want to
considerare f(t) = ∥ #‰x(t)∥ (the distance to the origin of the
point X(t)) or f(t) = ∥ #‰x ′(t)∥ (thespeed at which the point is
moving.)
To describe the rate with which f(t) is changing we could
compute its derivative,
df
dt
which tells us what the ratio between the change ∆f of f , and
the change ∆t in theparameter t is (at least approximately, if ∆t
is small). If we interpret t as “time” thenthis derivative tells us
how fast f(t) changes per second. But sometimes it is more usefulto
know how much f changes aer we have travelled a small distance
along the curve,rather than aer a short amount of time has passed.
In other words, for two nearby pointsX(t) and X(t+∆t) on the curve
we would like to know the ratio
(35)change in f
distance travelled=
f(t+∆t)− f(t)distance from X(t) to X(t+∆t)
We can work this out by observing that the distance fromX(t)
toX(t+∆t) is the lengthof the vector from X(t) to X(t+∆t), i.e.
distance from X(t) to X(t+∆t) = ∥ #‰x(t+∆t)− #‰x(t)∥ .Assuming
∆t is small, we have
∥ #‰x(t+∆t)− #‰x(t)∥ =∥∥∥∥ #‰x(t+∆t)− #‰x(t)∆t
∥∥∥∥ ∆t ≈ ∥∥ #‰x ′(t)∥∥ ∆t.We substitute this in (35), and
get
change in fdistance travelled
≈ f(t+∆t)− f(t)∥ #‰x ′(t)∥∆t
.
Now let ∆t → 0: the quantity on the le becomes what is called
the arc length deriv-ative of the function f along the curve vx(t),
and which is commonly denoted by dfds Inthe quantity on the right
we recognize the derivative of f with respect to t (time),
whichleads to
(36)df
ds=
1
∥ #‰x ′(t)∥df
dt.
Here dfdt = f′(t) is the usual derivative of f with respect to
t.
If we want to emphasize the distinction between these two
derivatives, then we cancall dfdt the “time derivative of f .”
-
30 2. PARAMETRIC CURVES AND VECTOR FUNCTIONS
15. Unit Tangent and Curvature
15.1. Unit tangent. We have seen that we can find a tangent
vector to the curvetraced out by some vector function #‰x(t),
simply by differentiating the vector function:#‰x ′(t) always
provides a tangent vector (if #‰x ′(t) ̸= #‰0 ). In fact any
multiple λ #‰x ′(t) of
A vector with length 1 iscalled a unit vector this vector will
also be a tangent vector (provided λ ̸= 0.) We can single out one
special
tangent vector, by choosing λ > 0 so that λ #‰x ′(t) has
length 1. Since for λ > 0 we have∥λ #‰x ′(t)∥ = λ∥ #‰x ′(t)∥ the
value ofλ thatwill makeλ #‰x ′(t) a unit vector isλ = 1/∥ #‰x
′(t)∥.
For this reason the vector
(37)#‰
T (t) =d #‰x
ds=
#‰x ′(t)
∥ #‰x ′(t)∥
is called the unit tangent vector to the curve corresponding to
the vector function #‰x(t).
15.2. Example. For our constant velocity parametrization (18) of
a straight line from§ 3 we have
#‰x(t) = #‰a + t #‰v ,
so that #‰x ′(t) = #‰v and hence
#‰
T =#‰v
∥ #‰v ∥.
We see that the unit tangent vector is constant.
15.3. Curvature and normal. If the curve described by a vector
function #‰x(t) is nota straight line, then the tangent to the
curve will turn as one moves along the curve. ecurvature vector #‰κ
measures how much the curve is curved. It is defined to be the
rateof change of the unit tangent, but with respect to arc length
instead of with respect to thegiven parameter t. us
(38) #‰κ def=d
#‰
T
ds.
According to our definition of “derivative with respect to arc
length” the right hand sidestands for
(39)d
#‰
T
ds=
1
∥ #‰x ′(t)∥d
#‰
T
dt.
To write this completely in terms of the original vector
function #‰x(t) we use (37)
(40) #‰κ =1
∥ #‰x ′(t)∥d
dt
{ 1∥ #‰x ′(t)∥
d #‰x
dt
}is formula is not as short as the original definition (38), but
it does show that the curva-ture vector comes about by
differentiating the vector function #‰x(t) twice (and dividingby ∥
#‰x ′(t)∥ at the right moments.)
-
17. PROBLEMS 31
eorem. e curvature vector #‰κ is perpendicular to the tangent,
i.e. #‰κ ⊥ #‰T .
P. We have to show that #‰κ •#‰
T = 0. From the second form (39) of the definitionof #‰κ we
see
#‰κ •#‰
T = #‰κ •( 1∥ #‰x ′(t)∥
d#‰
T
dt
)=
1
∥ #‰x ′(t)∥#‰κ •
d#‰
T
dt.
Remember that#‰
T (t) is always a unit vector, i.e.#‰
T (t) has constant length: by § 11 thisimplies that d
#‰Tdt ⊥
#‰
T (t) and we are done. □
ere are two concepts that are derived from the curvature vector:
the curvature κis by definition the length of the curvature vector
#‰κ ,
(41) κ = ∥ #‰κ∥ =
∥∥∥∥∥d#‰
T
ds
∥∥∥∥∥ ,and the normal vector to the curve is
(42)# ‰
N =#‰κ
∥ #‰κ∥=
d#‰Tds∥∥∥d #‰Tds ∥∥∥ .
e normal vector is undefined when #‰κ =#‰0 , because it would
require division by zero.
Since #‰κ is perpendicular to#‰
T , the normal vector# ‰
N is also perpendicular to#‰
T (henceits name).
(43)d
#‰
T
ds= κ
# ‰
N
16. Osculating plane
At any pointX(t) on a space curve given by #‰x(t) one defines
the osculating planeto be the plane that contains the point X(t)
and that is parallel to both the tangent
#‰
T (t)
and normal# ‰
N(t) of the curve.
If we want to write a defining equation for the osculating plane
as in § 11.2 thenwe need a vector perpendicular to the osculating
plane. Since this plane is defined to beparallel to both
#‰
T and# ‰
N , we can find a normal vector to the osculating plane by
takingthe cross product of
#‰
T and# ‰
N . is vector is called the binormal to the curve. In aformula,
it is defined to be
(44)#‰
B =#‰
T× # ‰N .
17. Problems
1. What sign does ω have in Figure 7 ? Howwould the figure
change if we change thesign of ω? Does the force
#‰F on the object
change if we change the sign of ω?
2. While reading the definition of the cur-vature vector and
especially aer seeing thenot-so-nice formula (40) for the
curvature
vector it is natural to think “isn’t there a sim-pler way to
define curvature?” Here is oneaempt. The questions invite you to
judgethis alternative definition of “curvature” onits merits.
For any parametric curve a tangent vec-tor is given by #‰x ′(t).
To see if the curve de-viates from being a straight line we
simply
-
32 2. PARAMETRIC CURVES AND VECTOR FUNCTIONS
check if #‰x ′(t) changes, and we can do thisby computing the
derivative of #‰x ′(t). So letus define
# ‰K(t) = #‰x ′′(t),
and let us see if this measures howmuch thecurve is curved. (As
mathematicians we candefine whatever we want, and this definitionis
a lot simpler than (40).)
(a) True or False: if# ‰K(t) =
#‰0 for all t then
the curve is a straight line …?
(b) Compute# ‰K(t) for #‰x(t) =
(t2
t2
), and
draw the curve traced out by this particularvector function.
(c) True or False: if #‰x(t) traces out a straightline then
# ‰K =
#‰0 …?
(d) Conclusion: To what extent does thestatement “
# ‰K =
#‰0 ” have anything to
do with the statement “ #‰x(t) traces out astraight line”?
3. Suppose a point P is rotating around aline ℓ, keeping its
distance to the line fixedat r, and moving in a plane perpendicular
tothe line. Suppose the point has angular ve-locity ω: this means
that during a time in-terval of length t the angle swept out by
theline segment connecting P to ℓ is exactly ωt.
In a previous math or physics class it wasshown that the
velocity of the point P is ωr,where r is the distance from P to the
line ℓ.
The angular velocity vector is defined tobe the vector #‰ω whose
length is ω, and thatis parallel to the line ℓ. There are two
suchvectors (± #‰ω). By definition #‰ω points in thedirection in
which a screw would move if it
were turning in the same direction as thepoint P .
(a) Assuming the line ℓ passes through theorigin show from the
drawing that the ve-locity vector of the point P is #‰v = #‰ω× #‰x
.(There are two things to worry about: does#‰ω× #‰x have the same
direction as #‰v ? anddoes #‰ω× #‰x have the same length as #‰v
?)(b) Show that the acceleration vector isgiven by #‰a = #‰ω×( #‰ω×
#‰x). (hint: don’t usethe drawing, but combine the definitions
of#‰v and #‰a , in (24) and (25) and also the prod-uct rule;
finally, keep in mind that you havejust found that #‰v = #‰ω× #‰x
.)(c) If someone told you they had computedthe acceleration vector
and found
#‰a = ( #‰ω× #‰ω)× #‰x ,
could they be right? Explain! What if theytold you they got #‰a
= #‰ω× #‰ω× #‰x?(d) True or False (explain your answers):
(a) #‰v ⊥ #‰x? (b) #‰a ⊥ #‰v ? (c) #‰aand #‰x are parallel?
(e) Include the acceleration vector #‰a in theabove drawing.
4. Consider the “twisted cubic,” i.e. the curvegiven by #‰x(t) =
t #‰e1 + t2 #‰e2 + t3 #‰e3.
(a) For any given t find the tangent line tothe curve at the
point X(t), and find wherethis curve intersects the xy-plane.
(b) If you call that intersection point P (t),then which curve
is traced out by the pointP (t) as t varies?
5. Compute the length of one full turn of thehelix by taking the
parametrization given in
Origin
∆s = r∆θ = rω∆t
#‰ω
#‰x
#‰v = #‰ω× #‰xℓ
r rP P
-
17. PROBLEMS 33
(21) and computing the length of the seg-ment with 0 ≤ θ ≤
2π.
Aer computing the length, considerthis: let P be the perimeter
of the circle un-derneath the helix, and let H be the
heightachieved by one full turn of the helix. Showthat the length L
of the helix satisfies L2 =P 2 +H2.
6. There is a multistory parking ramp wherethe way out is a path
in the shape of a he-lix that is wound around the outside of
thebuilding. As a car drives down this pathat night its headlights
shine a spot on theground. Which curve is traced out by thislight
spot as the car drives all the way down?
Make a good drawing. Assume for sim-plicity that the center of
the Parking ramp isthe z-axis.
7. Compute the tangent, curvature, normaland binormal for the
following curves
(a) The parabola: #‰x(t) =(t2
t
). At which
point on the curve is the curvature thelargest?
(b) Neil’s parabola: #‰x(t) =(
t2
t3
). At
which point on the curve is the curvature thelargest?
(c) The helix: #‰x(θ) =(
R cos θR sin θaθ
)(see § 6 for
an explanation of the constantsR and a). Atwhich point on the
curve is the curvature thelargest?
(d) The graph of y = ex by using theparametrization #‰x(t) =
(tet
). Where on
the graph is the curvature the largest? •
-
CHAPTER 3
Functions of more than one variable
1. Functions of two variables and their graphs
1.1. Definition. A function of two variables has two
ingredients: a domain and arule. e domain of the function is a
collection of points in the xy-plane. For each point(x, y) from the
domain of the function, the rule should tell us how to find the
functionvalue f(x, y).
Just as with functions of one variable, the “rule” that gives us
the function value isoen specified by some formula, e.g. f(x, y) =
x + y. e domain of a function is theset of points at which we
define the function. is can in principle be any set of pointsin the
plane. Typically the domain will be a rectangle, or a disc, or it
could be the entirexy-plane, possibly with some points and lines
removed.
z
height:z=f(x,y)
Domain o
f f
x
y
Figure 1. The graph of some function, and its domain (a
rectangle in this example).
1.2. Graphs. By definition, the graph of a function z = f(x, y)
is the collection ofall points (x, y, z) in three dimensional space
that satisfy the equation z = f(x, y).
e graph is usually a surface that floats above (or below) the
domain of the function(see Figure 2).
35
-
36 3. FUNCTIONS OF MORE THAN ONE VARIABLE
1.3. Level sets. e graph of a function of two variables is a
surface siing in threedimensional space, which can be difficult to
draw or visualize. Instead of looking at thegraph we can also
consider its level sets. If c is any real number, then, by
definition, thelevel set at level c of the function is the set of
all points (x, y) in the plane that satisfyf(x, y) = c.
z
c
x
y
level set at level c
level set at level c
x
y
Figure 2. The graph of some function (top), and a construction
of one of its level sets (boom).Note that by definition the level
set (“at level c”) is the curve in the xy-plane under the graph:
itis obtained by intersecting the graph of the function with a
horizontal plane at height c, and thenprojecting this curve of
intersection onto the xy-plane.
Since the level set is the set of all solutions to the equation
f(x, y) = c, one oen usesthe notation f−1(c) (“f -inverse of c”)
for the level set. We can summarize the definitionin an
equation:
f−1(c) ={(x, y) : f(x, y) = c
}.
Note that the definition says that f−1(c) is not a number, but a
set of points!
-
1. FUNCTIONS OF TWO VARIABLES AND THEIR GRAPHS 37
Level sets tend to be curves in the xy-plane, although in
general level sets can haveany shape (see Problem 5.13 for an
example.) ey are usually easier to draw than thegraphs of the
corresponding functions.
1.4. An example from the “real” world. Here is a function of
local interest. edomain of the function is the water surface of
Lake Mendota (let’s pretend this is a planedomain), and the
function, which we will call d instead of f , is given by d(x, y) =
thedepth of the lake at location (x, y). ere is no formula for this
function, but the Wiscon-sin Department of Natural Resources has
measured the depth and presented the resultsin terms of the level
sets of the function d.
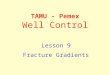
Figure 3. The level curves of a function z = d(x, y). The domain
of this function is the lakesurface, and d(x, y) is the depth in
meters of Lake Mendota at (x, y). To see the graph of thefunction
we could try to drain the lake.
See
http://limnology.wisc.edu/lake_information/mendota/mendota.html
1.5. A comment about language and set-theoretic notation. Wewill
oen say “con-sider a function z = f(x, y)…”, but there is a sense
in which this is incorrect. It is conve-nient to say “consider a
function z = f(x, y)…” since it not only names the function, butit
also gives the independent variables x, y, and the dependent
variable z a name. Nev-ertheless, the symbol in the equation z =
f(x, y) that actually represents the function is“f”. e correct way
of introducing the function¹ would be to say “consider a functionf
.”
In fact, in the notation that is used inmodernmathematics
onewouldwrite “Considerthe function f : D → R…” Here f is the name
of the function we are introducing, D is
¹Saying “consider the function z = f(x, y)…” to introduce the
function f is like saying “Please meet mybrother Joe, Bill, and
Sue” when you want to introduce your brother Joe, who happens to be
standing next toBill and Sue. To introduce your brother, you would
of course say “Please meet my brother Joe.” and to introducethe
function you should really say “Consider the function f .”
http://limnology.wisc.edu/lake_information/mendota/mendota.html
-
38 3. FUNCTIONS OF MORE THAN ONE VARIABLE
the domain of that function (so D is a set of points in the
plane), and R stands for the setof real numbers, indicating that
computing f always results in a real number.
1.6. Vector notation. If #‰x is the position vector of the point
(x, y) in the plane, i.e.if #‰x = ( xy ), then one sometimes
writes
f(x, y) = f( #‰x).
Physicists have a preference for #‰r instead of #‰x (because
they call the position vector the“radius vector”), and will write
f(x, y) = f( #‰r ).
2. Linear functions
e simplest function of one variable are those of the form f(x) =
ax + b. eirgraphs are lines, and we called them linear
functions.
A linear function of two variables is a function f of the
form
(45) z = f(x, y) = ax+ by + c,
where a, b, c are constants.
x
y
z
Figure 4. The graph of a linear function z = ax+ by + c.
e graph of a linear function is always a plane. Indeed, the
graph consists of allpoints (x, y, z) that satisfy the equation
−ax− by + z = c,
which we can write as#‰n • #‰x = #‰n • #‰p ,
where
#‰n =
−a−b1
, and #‰p =00c
.
-
3. QUADRATIC FORMS 39
3. adratic forms
Aer learning about linear functions in pre-calculus one usually
goes on to quadraticfunctions. We will do the same for functions of
two variables and study adratic Forms.Just as in the one variable
case where quadratic functions can have a maximum or min-imum,
quadratic forms provide examples of functions of two variables that
can have amaximum or a minimum, or, it turns out, a third kind of
“min-max” or “saddle shape.”ey provide the basic profile of what we
will run into when we look for local minimaand maxima of functions
of two variables. In particular, the technique of classifying
qua-dratic forms by completing the square, which we will see in
this section, is the key to thesecond derivative test for functions
of more than one variable.
3.1. Definition. e general quadratic form in two variables
is
(46) f(x, y) = Ax2 +Bxy + Cy2,
whereA, B, and C are constants. Depending on the values of these
constants the graphsof the functions can have a number of different
shapes.
In addition to these quadratic forms one can also consider the
more general class ofquadratic functions,
f(x, y) = Ax2 +Bxy + Cy2 +Dx+ Ey + F,
which also have terms of degree 1 and 0. We will restrict
ourselves to quadratic forms(for now).
e prototypical examples. ere are four important special cases
that are represen-tative of what the graphs of quadratic forms can
look like. ese special cases are
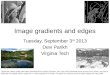
f(x, y) = x2 + y2, and g(x, y) = −x2 − y2,(47a)
h(x, y) = x2, and h̃(x, y) = −x2,(47b)k(x, y) = xy(47c)
eir graphs are discussed in Figure 5.
3.2. Classifying quadratic forms – the general procedure. All
quadratic forms havegraphs that look like one of the examples shown
above – but how can we tell which itis? In other words, if Q(x, y)
is a given quadratic form how can we tell if it is
definite,indefinite, or semidefinite? How do we know for which (x,
y) the formQ(x, y) is positiveor negative? It turns out that we can
always find out by using the trick of “completingthe square.”
e general procedure for a given quadratic formQ(x, y) =
Ax2+Bxy+Cy2 is asfollows:
(1) If A = 0, then we really have Q = Bxy + Cy2 and we can
factor Q as
Q(x, y) = (Bx+ Cy)y.
-
40 3. FUNCTIONS OF MORE THAN ONE VARIABLE
(2) Assume A ̸= 0. We factor out A, and complete the square for
the first twoterms:
Q(x, y) = A{x2 +
B
Axy +
C
Ay2}
= A{(
x+B
2Ay)2 − ( B
2Ay)2
+C
Ay2}
= A{(
x+B
2Ay)2︸ ︷︷ ︸
u2
+4AC −B2
4A2y2︸ ︷︷ ︸
±v2
}.
(3) If 4AC −B2 > 0, then the expression in braces is
positive, and we can write
Q(x, y) = A(u2 + v2), where u = x+B
2Ay, and v =
√4AC −B2
2Ay.
Depending on the sign of A our function is always positive or
always negative,and we say the form is positive definite or
negative definite.
The two forms f and g from (47a)are called definite, since they
cannotchange sign:
f(x, y) = x2 + y2
is the sum of two squares, and there-fore is always positive,
unless both xand y vanish. Similarly, g(x, y) =−f(x, y) is always
negative, exceptat (x, y) = (0, 0).
The form h(x, y) = x2 is called semi-definite because it too
cannot changeits sign. Clearly, h(x, y) = x2 isnever negative, but
for h(x, y) to bepositive, we need x ̸= 0. So, the func-tion h(x,
y) is positive, except on theline x = 0 (the y axis). The graph
ofthe function h̃(x, y) = −y2 is simi-lar, but upside down.
The form k(x, y) = xy is called in-definite, because it can be
both posi-tive and negative: if x and y have thesame sign, then xy
> 0, but if theyhave opposite signs, then xy < 0.Thus the
graph of z = xy lies abovethe xy-plane in the first and
thirdquadrants, and below the xy-plane inthe second and fourth
quadrants.
xy > 0
xy > 0
xy < 0
xy < 0x
y
Figure 5. Graphs of some representative quadratic forms.
-
3. QUADRATIC FORMS 41
(4) If 4AC −B2 < 0, then we have
Q(x, y) = A(u2 − v2), where u = x+ B2A
y, and v =
√B2 − 4AC
2Ay.
When this happens we can factor the quadratic form, i.e. we
have
Q(x, y) = A(u+ v)(u− v).
e form is indefinite.(5) in the only remaining case we have 4AC
−B2 = 0, so that
Q(x, y) = A(x+
B
2Ay)2
.
In this case the form is a perfect square (times A). e form is
semi-definite.
To understand this procedure it is perhaps best to look at how
it works in some examples.
3.3. Classifying quadratic forms – two examples.
3.3.1. An indefinite quadratic form. Consider the formQ(x, y) =
−3x2+9xy+6y2.We rewrite this as follows:
Q = −3x2 + 6xy + 9y2
= −3(x2 − 2xy − 3y2
)= −3
[x2 − 2xy + y2︸ ︷︷ ︸−4y2] complete the square
= −3[(x− y)2 − 4y2
] in this case we get the difference of twosquares, so use a2 −
b2 = (a− b)(a+ b)
= −3(x− y − 2y)(x− y + 2y)= −3(x− 3y)(x+ y).
is shows thatQ(x, y) > 0 when y > 13x or y < −x,
andQ(x, y) < 0 when−x < y <13x.
y
x
Q(x,y)
-
42 3. FUNCTIONS OF MORE THAN ONE VARIABLE
3.3.2. A positive definite quadratic form. To see a different
example, consider the qua-dratic form Q(x, y) = 2x2 − 4xy + 6y2. By
completing the square we can write it as
Q(x, y) = 2{x2 − 2xy + 3y2
}= 2
{x2 − 2xy + y2 + 2y2
}the square is complete
= 2{(x− y)2 + 2y2
}= 2(x− y)2 + 4y2.
We see that this particular quadratic form is positive
definite.
4. Functions in polar coordinates r, θ
Recall that instead of using Cartesian coordinates (x, y) to
specify the location pointsin the plane, we can also use polar
coordinates. In many cases it is much easier to describea function
using polar coordinates than in Cartesian coordinates.
To go back and forth between Cartesian and Polar Coordinates we
can use the fol-lowing relations
x = r cos θ(48a)
y = r sin θ(48b)
r =√
x2 + y2(48c)
θ = arctany
x
(48d)
e equation for θ is only valid for x > 0, where −π2 < θ
<π2 . In other regions of the
plane there are other expressions relating θ to (x, y). See
problem 5.8.
θ
r
x
y
P
θ0
θ=θ0r=r0
Figure 7. Polar coordinates are defined in the picture on the
right (see also equations (48)). Onthe le: the set of points at
which θ has one given value θ0 form a half line emanating from
theorigin that makes an angle θ0 with the positive x-axis. The set
of points at which r has a givenvalue r0 form a circle centered at
the origin, with radius r0.
e simplest kinds of functions one can consider in polar
coordinates are those thatonly depend on one of those coordinates,
i.e. functions that only depend on the radius r,and functions that
only depend on the polar angle θ. Let’s look at some examples of
suchfunctions.
-
4. FUNCTIONS IN POLAR COORDINATES r, θ 43
xy
z
z = r =√
x2 + y2
r
z
z=Φ(r) =
r
Figure 8. Radially symmetric functions. The graph of z = r.
4.1. Radially symmetric functions. e functions
f(x, y) = x2 + y2, g(x, y) =√x2 + y2, h(x, y) = ln
(x2 + y2
),
all can be expressed in terms of the radius r only. Namely,
using r2 = x2 + y2, we have
f(x, y) = r2, g(x, y) = r, h(x, y) = ln r2(= 2 ln r).
In general, a function z = f(x, y) that can be wrien in terms of
the radius r only, i.e. afunction for which there is some function
Φ of one variable with
f(x, y) = Φ(r), i.e. f(x, y) = Φ(√
x2 + y2),
is called a radially symmetric function.Since a radially
symmetric function only depends on the radius r, its level sets
consist
of circles centered at the origin (one exception: the origin, r
= 0 can also be a level set,and this is obviously not a circle but
a point.)
As an example, we consider the function g(x, y) =√x2 + y2 = r in
more detail.
e function Φ of one variable here is Φ(r) = r. We can try to
visualize the graph of gby first looking at the positive x-axis
only. ere we have f(x, 0) =
√x2 = x. We get
the graph of g by revolving the graph of z = x around the
z-axis. See Figure 8.
4.2. Functions of θ only. Here are two functions that happen to
depend on the polarangle θ only:
f(x, y) = sin θ, h(x, y) = θ.
We can rewrite these functions in terms of x and y by using the
relations between Carte-sian and Polar coordinates (48). We get
f(x, y) = sin θ =y
r=
y√x2 + y2
for f , and
h(x, y) = θ = arctany
xfor h, at least in the right half plane where x > 0.
A function that only depends on θ is constant on rays emanating
from the originbecause the polar angle θ is constant on such rays.
e level sets of such a functiontherefore consist of half-lines
(“rays”) starting at the origin. Its graph consists of
“spokes”aached to the z-axis. Each spoke lies above a ray in the
xy-plane with some polar angleθ, and is aached to the z-axis at a
height given by the function value. As we vary θ, the
-
44 3. FUNCTIONS OF MORE THAN ONE VARIABLE
spoke rotates around the vertical axis and moves up or down, as
dictated by the function.Figure 9 shows what happens for f(x, y) =
sin θ.
θx y
z=f(θ)
“ray”
“spoke”
The graph of a function of θ onlyconsists of horizontal
spokes
aached to the z-axis.The graph of z = sin θ
(the x-axis is coming right at us.)
Figure 9
e function z = θ has a simpler formula in polar coordinates but
actually has amore complicated graph. Let us try to visualize its
graph: the spokes that make up thegraph are horizontal, aached to
the z-axis, and are at height θ. If we increase the angleθ the
spokes go up at a steady rate in a way that should remind us of a
helix (see § 6and Figure 5). Based on this description its graph
should look like the surface drawn inFigure 10. e surface is called
the helicoid, and it is not the graph of a function (it failsthe
“vertical line test.”) We could have known this from the beginning
, because when wedescribed our function as f(x, y) = θ, we should
have immediately asked which θ? epolar angle θ of any given point
is only determined up to a multiple of 2π. e “graph”that we have
drawn of the “function” z = θ reflects this. To make h(x, y) = θ
into anhonest function we have to say which of the many possible
angles θ we choose when weare given a point. One possible choice is
to always require the polar angle θ to lie between0 and 2π
(radians). More precisely, we can insist on
0 ≤ θ < 2π.
If we do this then there is a unique angle θ for each point (x,
y) in the plane. e graphof this function is shown on the right in
Figure 10.
5. Methods of visualizing the graph of a function
5.1. Freezing a variable. If a function is not familiar, then a
good strategy for draw-ing its graph is to “freeze a variable.” In
other words, to analyze a function z = f(x, y)we pretend y is a
constant: then x is the only independent variable, and we can try
todraw the graph of the function z = f(x, y), now thinking of this
as a function of onlyone variable. is graph is a curve in the xz
plane. We get one such curve for each choiceof y. Piecing these
graphs together then gives us the graph of the two-variable
functionz = f(x, y).
We could apply the same procedure with the roles of x and y
switched: i.e. for eachfixed x you try to graph z = f(x, y) as a
function of the variable y only, aer which wetry to fit all the
graphs we get for different values of x together.
x
y
z
-
5. METHODS OF VISUALIZING THE GRAPH OF A FUNCTION 45
x
y
x
y
Figure 10. The graph of z = θ is the helicoid. It is not the
graph of a function, but one can extracta function by choosing a
“branch” of the function. One possible choice, drawn here on the
right,is to restrict the polar angle θ to the interval 0 ≤ θ <
2π. There are many other possible choices.
5.2. Moving graphs. ere is another way of visualizing a function
z = f(x, y) oftwo variables in which we think of one of the
independent variables (e.g. y) as “time.” efinal picture is not one
static image of a three dimensional surface, but rather a movie ofa
graph that is moving around in the xz plane.
If we have a function z = f(x, y), then let us think of y as
time, and let us relabelit as t, so that we are looking at the
function z = f(x, t). Now at each moment in timet we can think of z
= f(x, t) as a function of one variable x whose graph we can try
todraw, regarding it as a still-image. en, as we let time t vary,
puing the still images ina sequence, you get a movie of a graph of
a changing function of one variable.
For instance, if the function is (once again) the saddle surface
function z = xy, thenwe would be considering the function z = xt.
At each moment t the graph of z = xt is
t=1
z
x x x x x
z z z z
t=−1 t=−1/2 t=0 t=1/2
Figure 11. The saddle movie. It’s about a line segment whose
slope changes, even though it isotherwise stuck to the origin.
-
46 3. FUNCTIONS OF MORE THAN ONE VARIABLE
a line with slope t. Puing these graphs together gives a movie
which begins with a lineof rather negative slope; during the movie
the slope increases, and in the middle of themovie our line has
achieved horizontality; finally, the closing shot presents us with
a linewith a very positive slope. Figure 11 shows some stills from
the movie.
is interpretation is not very different from the procedure of
“freezing the y vari-able.” e only real difference lies in what we
do with all the separate graphs we get aerwe freeze a variable. In
one case we try to piece them together to make a bigger draw-ing of
a three-dimensional object, in the other we put them together to
make a motionpicture.
Problems
In the problems in this stage of the course, you will be asked
to “sketch the graph of a function.”From math 221 you remember that
this meant you had to find minima, maxima, inflection points,and
other features of the graph. In 234 you will learn to do the same
for functions of two (andmore) variables, but for now you should
try to use the method of “freezing a variable” or othersimilar
tricks to get an idea of what the graph of f looks like.
You can use a graphing program (such as Grapher.app on the Mac,
GraphCalc on Windows,or one of the many websites such as
http://www.graphycalc.com/) to check your answer.
Note: very oen students try to fittheir drawings into a region
the sizeof a post-it. In this course, wheneveryou make a drawing,
especially if it’sa three-dimensional drawing, make itlarge! Use
half a page for a drawing.Make sure you have enough paper, tryto
find lots of cheap scrap paper.
1. If we were to drain LakeMendota, as sug-gested in § 1.4,
would the lake boom give usthe graph of d(x, y) or of −d(x, y)?
(whered is the depth of the lake)? •
2. What are the signs of the coefficients a,b, and c for the
linear function whose graphis drawn in Figure 4? •
3. About planes and their intersections withthe coordinate
axes.
(a) Where does the plane z = 3x − y + 6intersect the three
coordinate axes? •
(b) Find the equation for the plane that in-tersects the x-axis
at x = 4, the y-axis aty = 2, and the z-axis at z = 3. •
(c) Find the equation for the plane that in-tersects the x-axis
at x = a, the y-axis aty = b, and the z-axis at z = c. (Write
theequation as nice as possible.) •
4. Find a formula for the distance to the ori-gin of the graph
of (45). •
5. Classify the following quadratic forms asdefinite,
indefinite, or other, by completingthe square. Determine the zero
set for eachof these quadratic forms.
(a) f(x, y) = x2 + 2y2 •
(b) Q(x, y) = x2 − y2 •
(c) g(x, y) = x2 − 4xy + 3y2 •
(d) Q(s, t) = 9s2 − 36st+ 81t2 •
(e)M(α, β) = 12α2 − αβ + β2. •
(f) Q(x, y) = xy + y2 •
(g) Q(x, y) = x2 + 2xy •
6. For which values of the constant k is thequadratic form
Q(x, y) = x2 + 2kxy + y2
positive definite? •
7. Which functions of two variables z =f(x, y) are defined by
the following formu-lae?
http://www.graphycalc.com/
-
PROBLEMS 47
▷ Find draw the domain of each function(the largest domain on
which the definitionwould make sense).
▷ Try to sketch their graphs.
▷ Draw the level sets for each function.
(a) z = xy •
(b) z − x2 = 0 •
(c) z2 − x = 0 •
(d) z − x2 − y2 = 0 •
(e) z2 − x2 − y2 = 0 •
(f) xyz = 1 •
(g) xy/z2 = 1 •
(h) x+ y + z2 = 0
(i) x+ y + z2 = 1
8. The following expressions are all equal tothe polar angle θ
in some region of the xy-plane. Explain why the expression gives
θ,and identify in which region this holds.
(a) θ = arctany
x•
(b) θ = π + arctany
x•
(c) θ = 2π + arctany
x•
(d) θ =π
2− arctan x
y•
(e) θ = arcsin y√x2+y2
. •
9. “The level set is always a curve…” — not!If d(x, y) is the
depth function of Lake Men-dota (see §1.4), then what are the level
setsd−1(c) for c = 0, c = +24 and for c = −24