Embed Size (px)
Citation preview

Kretanje vozila u ravniAnaliza vibracija vozila
MEHANIKA VO�NJE
Odsek za puteve, ºeleznice i aerodrome
Prof dr Stanko Br£i¢Doc dr Stanko �ori¢Doc dr Anina Glumac
Gra�evinski fakultetUniverzitet u Beogradu
�k. god. 2018/19
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Sadrºaj
1 Kretanje vozila u ravniDiferencijalne jedna£ine kretanjaVremenski odgovor
2 Analiza vibracija vozilaVe²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Sadrºaj
1 Kretanje vozila u ravniDiferencijalne jedna£ine kretanjaVremenski odgovor
2 Analiza vibracija vozilaVe²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Generalisane koordinate i sile (pokretni sistem)
10
Vehicle Planar DynamicsIn this chapter we develop a dynamic model for a rigid vehicle in a planarmotion. When the forward, lateral and yaw velocities are important and areenough to examine the behavior of a vehicle, the planar model is applicable.
10.1 Vehicle Coordinate Frame
The equations of motion in vehicle dynamics are usually expressed in a setof vehicle coordinate frame B(Cxyz), attached to the vehicle at the masscenter C, as shown in Figure 10.1. The x-axis is a longitudinal axis passingthrough C and directed forward. The y-axis goes laterally to the left fromthe driver’s viewpoint. The z-axis makes the coordinate system a right-hand triad. When the car is parked on a flat horizontal road, the z-axis isperpendicular to the ground, opposite to the gravitational acceleration g.
xz
y
FxFz
Fy
Mz
My
Mx
ϕθ
ψ
C
pq
r
FIGURE 10.1. Vehicle body coordinate frame B(Cxyz).
To show the vehicle orientation, we use three angles: roll angle ϕ aboutthe x-axis, pitch angle θ about the y-axis, and yaw angle ψ about the z-axis. Because the rate of the orientation angles are important in vehicle
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Sile koje deluju na vozilo - reakcije podloge
9
Applied DynamicsDynamics of a rigid vehicle may be considered as the motion of a rigidbody with respect to a fixed global coordinate frame. The principles ofNewton and Euler equations of motion that describe the translational androtational motion of the rigid body are reviewed in this chapter.
9.1 Force and Moment
In Newtonian dynamics, the forces acting on a system of connected rigidbodied can be divided into internal and external forces. Internal forcesare acting between connected bodies, and external forces are acting fromoutside of the system. An external force can be a contact force, such as thetraction force at the tireprint of a driving wheel, or a body force, such asthe gravitational force on the vehicle’s body.
xz
y
Fy2Mz2
My2
Mx2
C
Fz2
Fx2
Fy3
Fz3
Fx3
My3
Mz3Mx3
FIGURE 9.1. The force system of a vehicle is the applied forces and moments atthe tireprints.
External forces and moments are called load, and a set of forces andmoments acting on a rigid body, such as forces and moments on the vehicleshown in Figure 9.1, is called a force system. The resultant or total force Fis the sum of all the external forces acting on a body, and the resultant or
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Diferencijalne jedna£ine kretanja vozila u ravni590 10. Vehicle Planar Dynamics
X
Y
C
xy FxFy
v
βvx
vy
d
ψ
BG
FIGURE 10.6. A rigid vehicle in a planar motion.
The velocity vector of the vehicle, expressed in the body frame, is
BvC =
⎡⎣ vxvy0
⎤⎦ (10.29)
where vx is the forward component and vy is the lateral component of v.The rigid body equations of motion in the body coordinate frame are:
BF = BRGGF
= BRG
¡m GaB
¢= m B
GaB
= m BvB +m BGωB × BvB. (10.30)
BM =Gd
dtBL
= BGLB
= BL+ BGωB × BL
= BI BGωB +
BGωB ×
¡BI B
GωB
¢. (10.31)
The force, moment, and kinematic vectors for the rigid vehicle are:
BFC =
⎡⎣ FxFy0
⎤⎦ (10.32)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Kretanje vozila u ravni
Diferencijalne jedna£ine kretanja vozila u ravni
Zakon o kretanju centra mase i promene momenta koli£inekretanja:
m~v = ~FR Jzωz =Mz
Dobija se (u sistemu pokretnih koordinata vozila):
mvx −mωz vy = Fx
mvy +mωz vx = Fy
J ωz =Mz
(1)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Prostorni i materijalni sistem (kretanje u ravni)586 10. Vehicle Planar Dynamics
X
Y
C
x
y
v
β
d
ψ
BG1
2
3
4r2
r1
r3
r4
Yaw angleSideslipβ
ψCruise angleψ + β
FIGURE 10.3. Top view of a moving vehicle to show the yaw angle ψ betweenthe x and X axes, the sideslip angle β between the velocity vector v and thex-axis, and the crouse angle β + ψ between with the velocity vector v and theX-axis.
and then moving forward on the left side, the only unnumbered wheel is thewheel number 6.If the global position vector of the car’s mass center is given by
Gd =
∙XC
YC
¸(10.7)
and the body position vectors of the wheels are
Br1 =
∙a1w/2
¸(10.8)
Br2 =
∙a1−w/2
¸(10.9)
Br3 =
∙−a2−w/2
¸(10.10)
Br4 =
∙−a3−w/2
¸(10.11)
Br5 =
∙−a3w/2
¸(10.12)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Kretanje vozila u ravni
Sile koje deluju na vozilo (za ravno kretanje)
Sile na kontaktu svakog to£ka sa podlogom (u ravni podloge):
- vu£na sila ili sila ko£enja Rx = µxRz
- sila otpora kotrljanju Rr = −µr Rz- bo£na reakcija puta (proporcionalna sa uglom bo£nog klizanja)
Ry = −Cα α
- spreg poravnanja (momenat skretanja) Mz = Ry axα
Ne posmatraju se (direktno) gravitacione sile - kretanje uhorizontalnoj ravni
Obi£no se zanemaruje visinska razlika izme�u podloge (otiskagume), centra to£ka i centra mase vozila (sile u ravni)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Sile na kontaktu to£ka sa podlogom600 10. Vehicle Planar Dynamics
xw
v
α
xβ
δ
xw v xβ
δ
y
yw
y
yw
α
(a) (b)
FIGURE 10.9. Angular orientation of a moving tire along the velocity vector vat a sideslip angle α and a steer angle δ.
10.3.2 Tire Lateral Force
Figure 10.9(a) illustrates a tire, moving along the velocity vector v at asideslip angle α. The tire is steered by the steer angle δ. If the angle betweenthe velocity vector v and the vehicle x-axis is shown by β, then
α = β − δ. (10.104)
The lateral force, generated by a tire, is dependent on sideslip angle α thatis proportional to the sideslip for small α.
Fy = −Cα α
= −Cα (β − δ) (10.105)
Proof. A tire coordinate frame Bw(xw, yw) is attached to the tire at thecenter of tireprint as shown in Figure 10.9(a). The orientation of the tireframe is measured with respect to another coordinate frame, parallel tothe vehicle frame B(x, y). The angle between the x and xw axes is the tiresteer angle δ, measured about the z-axis. The tire is moving along the tirevelocity vector v. The angle between the xw-axis and v is the sideslip angle
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Kretanje vozila u ravni
Sile koje deluju na vozilo (za ravno kretanje)
Projektovanjem sila na ose koordinatnog sistema to£kaxwywzw se dobija:
Fxw = Rx −Rr cosαFyw = Ry −Rr sinαMzw = Ry axα
(2)
gde je Rx = µxRz, Rr = −µr Rz, Ry = −Cα α
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Bo£na sila na kontaktu to£ka sa podlogom600 10. Vehicle Planar Dynamics
xw
v
α
xβ
δ
xw v xβ
δ
y
yw
y
yw
α
(a) (b)
FIGURE 10.9. Angular orientation of a moving tire along the velocity vector vat a sideslip angle α and a steer angle δ.
10.3.2 Tire Lateral Force
Figure 10.9(a) illustrates a tire, moving along the velocity vector v at asideslip angle α. The tire is steered by the steer angle δ. If the angle betweenthe velocity vector v and the vehicle x-axis is shown by β, then
α = β − δ. (10.104)
The lateral force, generated by a tire, is dependent on sideslip angle α thatis proportional to the sideslip for small α.
Fy = −Cα α
= −Cα (β − δ) (10.105)
Proof. A tire coordinate frame Bw(xw, yw) is attached to the tire at thecenter of tireprint as shown in Figure 10.9(a). The orientation of the tireframe is measured with respect to another coordinate frame, parallel tothe vehicle frame B(x, y). The angle between the x and xw axes is the tiresteer angle δ, measured about the z-axis. The tire is moving along the tirevelocity vector v. The angle between the xw-axis and v is the sideslip angle
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Kretanje vozila u ravni
Bo£na sila na kontaktu to£ka sa podlogom
Ravan to£ka zaklapa ugao δ sa osom x vozila - to je ugaookretanja to£ka: δ = ∠(x, xw)
Vektor brzine to£ka zaklapa ugao bo£nog klizanja α sa osomxw to£ka: α = ∠(xw, ~v)
Ugao izme�u ose x vozila i vektora brzine to£ka β je globalniugao bo£nog klizanja: β = ∠(x,~v)
Na slici (a) su prikazani pozitivni uglovi i vaºi relacijaα = β − δBo£na reakcija podloge je proporcionalna sa uglom bo£nogklizanja
Ry = −Cy α = −Cy(β − δ)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Kretanje vozila u ravni
Bo£na sila na kontaktu to£ka sa podlogom
U realnom okretanju to£kova vektor brzine je izme�u osa x ixw, kao ²to je dato na slici (b)
Zbog �eksibilnosti gume, vektor brzine zaklapa manji ugao odugla okretanja to£ka
Prema tome, β < δ , odn. pozitivan ugao okretanja to£kageneri²e negativan ugao bo£nog klizanja
Kako je, videti sl. (b), −α+ β = δ, opet vaºi relacija
α = β − δ
Nastajanje ugla bo£nog klizanja generi²e bo£nu reakcijupodloge Ry = −Cα α
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Sile na kontaktu sa podlogom to£ka br. 1598 10. Vehicle Planar Dynamics
C
x
y
1
Fx1
Fy1
1δ
xw
yw
Mz1
Fxw
Fyw
BBw
B1
FIGURE 10.8. The force system at the tireprint of tire number 1.
BFy =Xi
Fyi
=Xi
Fyw cos δi +Xi
Fxw sin δi (10.88)
BMz =Xi
Mzi +Xi
xiFyi −Xi
yiFxi . (10.89)
Proof. The coordinate frame of the wheel is a local coordinate called thewheel frame shown by T (xw, yw, zw) or Bw. For simplicity, we ignore thedifference between the tire frame at the center of tireprint and wheel frameat the wheel center. The force system generated at the tireprint in thewheel frame is
BwFw = Fxw ı1 + Fyw j1 (10.90)BwMw = Mzw k1 (10.91)
where
Fxw = Fxw1 − Fr1 cosα (10.92)
Fyw = Fyw1 − Fr1 sinα (10.93)
Mzw = Mzw1(10.94)
The wheel force in the xw-direction, Fxw , is a combination of the longitu-dinal force Fxw1 , defined by (3.96) or (4.59), and the tire roll resistance Fr1defined in (3.64). The wheel force in the yw-direction, Fyw , is a combina-tion of the lateral force Fyw1 defined by (3.130) and (3.153), and the tireroll resistance Fr1 defined in (3.64). The wheel moment in the zw-direction,
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Kretanje vozila u ravni
Sile koje deluju na vozilo (za ravno kretanje)
Koordinatni sistem gume xtytzt je u sredi²tu otiska gume (napodlozi)
Koordinatni sistem to£ka xwywzw je u sredi²tu mase to£ka
Koordinatni sistemi gume i to£ka su me�usobno paralelni, alije po£etak sistema to£ka izdignut za zt = rd od podloge
Koordinatni sistem vozila Cxyz je u centru mase vozila
Usvaja se da su svi ovi sistemi u istoj ravni - u ravni puta XY
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Kretanje vozila u ravni
Sile koje deluju na vozilo (za ravno kretanje)
Sile na kontaktu svakog to£ka sa podlogom se izraze ukoordinatnom sistemu to£ka (gume) xwywzw, pa se projektujuna sistem koji je u centru to£ka, ali je paralelan sakoordinatnim sistemom vozila Cxyz
Zatim se redukuju sile sa to£ka na centar mase vozila C
Dobija se, za to£ak broj i (i=1,. . . ,4):
Fx,i = Fxw,i cos δi − Fyw,i sin δiFy,i = Fxw,i sin δi + Fyw,i cos δi
Mz,i =Mzw,i + xiFy,i − yiFx,i(3)
gde je δi = ∠(x, xw,i)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Sile na kontaktu to£kova sa podlogom602 10. Vehicle Planar Dynamics
C
x
y
1 2
34
Fx1 Fx2
Fx3Fx4
Fy1 Fy2
Fy3Fy4
1δ 2δ
Mz1 Mz2
Mz4Mz3
FIGURE 10.10. A front-wheel-steering four-wheel vehicle and the forces in thexy-plane acting at the trireprints.
The vehicle lateral force Fy and momentMz depend on only the front andrear wheels’ lateral forces Fyf and Fyr , which are functions of the wheelssideslip angles αf and αr. They can be approximated by the followingequations:
Fy =
µ−a1vx
Cαf +a2vx
Cαr
¶r − (Cαf + Cαr)β + Cαfδ (10.114)
Mz =
µ−a
21
vxCαf −
a22vx
Cαr
¶r − (a1Cαf − a2Cαr)β + a1Cαfδ (10.115)
where Cαf = CαfL+CαfR and Cαr = CαrL+CαrR are equal to the sideslipcoefficients of the left and right wheels in front and rear, respectively.
Cαf = CαfL + CαfR (10.116)
Cαr = CαrL + CαrR (10.117)
Proof. For the two-wheel vehicle, we use the cot-average (7.3) of the outerand inner steer angles as the only steer angle δ.
cot δ =cot δo + cot δi
2(10.118)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Kretanje vozila u ravni
Sile koje deluju na vozilo (za ravno kretanje)
Za sve to£kove se dobija torzor sistema sila za centar masevozila (sistem Cxyz):
Fx =∑i
Fxw,i cos δi −∑i
Fyw,i sin δi
Fy =∑i
Fxw,i sin δi +∑i
Fyw,i cos δi
Mz =∑i
Mzw,i +∑i
xiFy,i −∑i
yiFx,i
(4)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Kretanje vozila u ravni
Diferencijalne jedna£ine kretanja vozila u ravni
Prema tome, unose¢i sile (4) u jedna£ine (1), dobija se (usistemu pokretnih koordinata vozila) sistem diferencijalnihjedna£ina ravnog kretanja vozila:
mvx −mωz vy = Fx
mvy +mωz vx = Fy
J ωz =Mz
(5)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Pretpostavke modela vozila sa dva to£ka
Zanemaruje se rotacija vozila oko poduºne ose x
Ravan vozila xy je uvek paralelna sa ravni puta XY
Vozilo se aproksimira kao model sa dva to£ka ("model bicikla")
Dva to£ka na jednoj osovini se prikazuju kao jedan zajedni£ki
Telo vozila se prikazuje kao jedan ekvivalentan ²tap
Ista masa, poloºaj teºi²ta i osovina kao i posmatrano vozilo
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka10. Vehicle Planar Dynamics 603
O
δ
lR
R1
C
a2
r
a1
vr
Center of rotation
fβfα
vβ
rα
vf
δ
FIGURE 10.11. A two-wheel model for a vehicle moving with no roll.
Furthermore, we define a single sideslip coefficient Cαf and Cαr as (10.116)and (10.117) for the front and rear wheels. The coefficient Cαf and Cαr areequal to the sum of the left and right wheels’ sideslip coefficients.Employing Equations (10.87)-(10.89) and ignoring the aligning moments
Mzi , the applied forces on the two-wheel vehicle are:
Fx = Fx1 cos δ1 + Fx2 cos δ2 − Fy1 sin δ1 − Fy2 sin δ2
= Fxf cos δ + Fxr − Fyf sin δ (10.119)
Fy = Fy1 cos δ1 + Fy2 cos δ2 + Fx1 sin δ1 + Fx2 sin δ2
= Fyf cos δ + Fyr + Fxf sin δ (10.120)
Mz = a1Fyf − a2Fyr (10.121)
The force equations can be approximated by the following equations, if weassume δ small.
Fx ≈ Fxf + Fxr (10.122)
Fy ≈ Fyr + Fyr (10.123)
Mz ≈ a1Fyf − a2Fyr (10.124)
Assume the wheel number i of a rigid vehicle is located at (xi, yi) in the
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Rezultuju¢e sile kod modela sa dva to£ka
Upravlja se samo sa prednjim to£kom (okre¢e se za ugao δ)
Rezultuju¢e sile, odn. torzor za centar mase vozila, (4), sudate sa:
Fx = Fx,f cos δ + Fx,r − Fy,f sin δFy = Fx,f sin δ + Fy,f cos δ + Fy,r
Mz = a1Fy,f − a2Fy,r(6)
gde su (Fx,f , Fx,r), kao i (Fy,f , Fy,r) sile u pravcu ose xw i ywprednjeg i zadnjeg to£ka (f, r)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Rezultuju¢e sile kod modela sa dva to£ka
Ako je ugao upravljanja δ relativno mali, onda je cos δ ≈ 1,kao i sin δ ≈ 0
Rezultuju¢e sile, odn. torzor za centar mase vozila, (6), sudate sa:
Fx ≈ Fx,f + Fx,r
Fy ≈ Fy,f + Fy,r
Mz = a1Fy,f − a2Fy,r(7)
Ukupna bo£na sila vozila Fy, kao i momenat Mz, zavise samood bo£nih sila to£kova Fy,f i Fy,r
Bo£ne sile to£kova su funkcije uglova bo£nog klizanja αf i αr
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Rezultuju¢e sile kod modela sa dva to£ka
Bo£na sila vozila Fy, kao i momenat Mz mogu da seaproksimiraju na slede¢i na£in:
Fy = (−a1vxCα,f +
a2vxCα,r) r − (Cα,f + Cα,r)β
+ Cα,fδ
Mz = (−a21
vxCα,f −
a22vxCα,r) r − (a1Cα,f − a2Cα,r)β
+ a1Cα,fδ
(8)
gde su Cα,f i Cα,r jednaki zbirovima koe�cijenata bo£nogklizanja to£kova levo i desno na prednjoj i zadnjoj osovini:
Cα,f = C lα,f + Cdα,f kao i Cα,r = C lα,r + Cdα,rS.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Rezultuju¢e sile kod modela sa dva to£ka
Relacije (8) se komplikovano izvode
Parametri Cα,f i Cα,r su koe�cijenti bo£nog klizanja prednjih izadnjih to£kova
Parametar δ je ugao okretanja prednjeg to£ka modela sa dvato£ka:
cot δ =cot δo + cot δi
2
Parametar β je globalni ugao klizanja vozila: β = ∠(x,~v). Zamali ugao δ je
β =vyvx
Parametar r je izvod po vremenu ugla skretanja ψ (ugaonabrzina vozila): r = ψ gde je ψ = ∠(X, x)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Rezultuju¢e sile kod modela sa dva to£ka
Relacije (8) zavise od tri parametra r, β i δ i mogu da seprikaºu kao linearne funkcije parametara r, β i δ:
Fy = Fy(r, β, δ) = Cr r + Cββ + Cδδ
Mz =Mz(r, β, δ) = Dr r +Dββ +Dδδ(9)
Koe�cijenti bo£ne sile i momenta skretanja su nagibi (izvodi)krivih linija kojima se prikazuje Fy i Mz u funkciji r, β, δ
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Rezultuju¢e sile kod modela sa dva to£ka
Koe�cijenti bo£ne sile Fy:
Cr = −a1vxCα,f +
a2vxCα,r
Cβ = −(Cα,f + Cα,r)
Cδ = Cα,f
(10)
Koe�cijenti momenta skretanja Mz:
Dr = −a21vxCα,f −
a22vxCα,r
Dβ = −(a1Cα,f − a2Cα,r)Dδ = a1Cα,f
(11)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Diferencijalne jedna£ine kretanja
Diferencijalne jedna£ine kretanja (5), gde su sile date sa (7),za relativno mali ugao okretanja to£ka, mogu da se prikaºu uobliku:
vx =1
mFx + rvy =
1
m(Fx,f + Fx,r) + rvy (12)
{vyr
}=
[Cβmvx
Crm − vx
DβJzvx
DrJz
]{vyr
}+
{CδmDδIz
}δ (13)
Za vozilo koje se kre¢e sa konstantnom brzinom unapred jevx = 0
Jedna£ina (12) postaje nezavisna, a bo£na brzina vy i ugaonebrzina r su dati sistemom jedna£ina (13)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Diferencijalne jedna£ine kretanja
Ako se posmatra da je ugao okretanja δ ulazna komanda, a dasu bo£na brzina vy i ugaona brzina r odgovor sistema, ondasistem jedna£ina (13) predstavlja linearan kontrolni sistem:
q = Aq + u (14)
Vektor kontrolnih promenljivih i ulazni vektor su dati sa:
q =
{vyr
}u =
{CδmDδIz
}δ (15)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Diferencijalne jedna£ine kretanja
Matrica koe�cijenat kontrolnog sistema je data sa:
A =
[Cβmvx
Crm − vx
DβJzvx
DrJz
](16)
odnosno, u razvijenom obliku, sa
A =
[−Cα,f+Cα,r
mvx
−a1Cα,f+a2Cα,rmvx
− vx−a1 Cα,f−a2 Cα,r
Jzvx−a21Cα,f+a
22Cα,r
Jzvx
](17)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Diferencijalne jedna£ine kretanja za stacionarno kretanje
Posmatra se model vozila sa dva to£ka i sa upravljanjem naprednjim to£kovima
Posmatra se okretanje pri stacionarnim uslovima (izvodi povremenu su jednaki nuli)
U diferencijalne jedna£ine kretanja
mvx −mωz vy = Fx
mvy +mωz vx = Fy
J ωz =Mz
se unosi: vx = 0, vy = 0, ωz = r = 0
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Diferencijalne jedna£ine kretanja za stacionarno kretanje
Diferencijalne jedna£ine kretanja postaju
Fx = −mrvyFy = mrvx
Mz = 0
Unose se izrazi (9) za bo£nu silu i momenat skretanja
Fy = Cr r + Cββ + Cδδ
Mz = Dr r +Dββ +Dδδ
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Diferencijalne jedna£ine kretanja za stacionarno kretanje
Diferencijalne jedna£ine kretanja postaju:
Fx = −mrvyCrr + Cββ + Cδδ = mrvx
Drr +Dββ +Dδδ = 0
(18)
Kod ustaljenog okretanja vozilo se okre¢e po krugu saradijusom R sa brzinom vx i sa ugaonom brzinom ωz = r,tako da je
vx = Rr (19)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Diferencijalne jedna£ine kretanja za stacionarno kretanje
Unose¢i (19) u jedna£ine (18), dobija se:
Fx = −mRvxvy
Cββ − (Crvx −mv2x)1
R= mrvx
Dββ +Drvx1
R= −Dδδ
(20)
Prva od jedna£ina odre�uje potrebnu vu£nu silu tako da brzinavx bude konstantna
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Diferencijalne jedna£ine kretanja za stacionarno kretanje
Druga i tre¢a od jedn. (20) odre�uju ustaljene vrednosti zaizlazne promenljive: za globalni ugao bo£nog klizanja β, kao iza krivinu putanje:
κ =1
R=
r
vx(21)
za konstantan ugao okretanja to£kova δ (ulazni parametar) priokretanju vozila sa konstantnom brzinom vx
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Diferencijalne jedna£ine kretanja za stacionarno kretanje
Druga i tre¢a od jedn. (20) mogu da se napi²u u matri£nomobliku, unose¢i de�niciju krivine (21):[
Cβ Crvx −mv2xDβ Drvx
]{βκ
}=
{−Cδ−Dδ
}δ (22)
Iz jedna£ina (22) mogu da se odrede β i κ u funkciji δ, pri£emu je vx dato sa (21)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Stacionarno kretanje vozila u krivini
Iz jedna£ina (20) mogu da se odre�uju razli£iti izlazniparametri u zavisnosti od ugla okretanja to£kova δ kaoulaznog podatka
Zavisnost krivina - okretanje ("curvature response"):
Sκ =κ
δ=
1
Rδ=
CδDβ − CβDδ
vx(DrCβ − CrDβ +mvxDβ(23)
Zavisnost ugao bo£nog klizanja - okretanje ("sideslipresponse")
Sβ =β
δ=
Dδ(Cr −mvx)−DrCδDrCβ − CrDβ +mvxDβ
(24)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Stacionarno kretanje vozila u krivini
Zavisnost ugaona brzina - okretanje ("yaw rate response"):
Sr =r
δ=κ
δvx = Sκ vx =
CδDβ − CβDδ
(DrCβ − CrDβ +mvxDβ(25)
Zavisnost bo£no ubrzanje - okretanje ("lateral accelerationresponse")
Sa =v2x/R
δ=κ
δv2x = Sκ v
2x =
(CδDβ − CβDδ)vxDrCβ − CrDβ +mvxDβ
(26)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Stacionarno kretanje vozila u krivini
Zavisnost krivina - okretanje ukazuje kako se menja radijuskrivine sa promenom ugla upravljanja (okretanja) to£ka
Zavisnost Sκ data sa (23) moºe da se prikaºe kao:
Sκ =κ
δ=
1/R
δ=
1
`
1
1 +Kv2x(27)
gde je
K =m
`2(a2Cα,f
− a1Cα,r
) (28)
i zove se faktor stabilnosti
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Stacionarno kretanje vozila u krivini - faktor stabilnosti
Znak faktora stabilnosti K odre�uje promenu zavisnosti Sκ sabrzinom vx - da li se Sκ pove¢ava ili smanjuje sa vx
Za K > 0a2Cα,f
>a1Cα,r
parametar Sκ je opadaju¢a funkcija sa vx
Krivina putanje κ = 1R se smanjuje za konstantan ugao
okretanja to£ka δ
Smanjenje krivine κ zna£i da se radijus putanje R priustaljenom okretanju pove¢ava sa pove¢anjem brzine vx
Pozitivan faktor stabilnosti K je poºeljan i vozilo sa K > 0 jestabilno. To je podupravljivost ("understeer")
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Stacionarno kretanje vozila u krivini - faktor stabilnosti
Za K < 0a2Cα,f
<a1Cα,r
parametar Sκ je rastu¢a funkcija sa vx
Krivina putanje κ = 1R se pove¢ava za konstantan ugao
okretanja to£ka δ
Pove¢anje krivine κ zna£i da se radijus putanje R priustaljenom okretanju smanjuje sa pove¢anjem brzine vx
Negativan faktor stabilnosti K je nepoºeljan i vozilo sa K < 0je nestabilno. To je nadupravljivost ("oversteer")
Treba da se smanji ugao okretanja to£ka δ ako se pove¢avabrzina vx da bi zadrºali isti radijus krivine
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Stacionarno kretanje vozila u krivini - faktor stabilnosti
Za K = 0a2Cα,f
=a1Cα,r
parametar Sκ ne zavisi od vx
Krivina putanje κ = 1R ostaje konstantna za konstantan ugao
okretanja to£ka δ
Konstantna krivina κ zna£i da se radijus putanje R priustaljenom okretanju ne menja sa promenom(pove¢anjem/smanjenjem) brzine vx
Nulti faktor stabilnosti K zna£i da je vozilo sa K = 0 nagranici stabilnosti. To je neutralna upravljivost ("neutralsteer")
Kada se vozi sa K = 0 ne mora da se menja ugao okretanjavozila ako se pove¢ava ili smanjuje brzina kretanja u krivini
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Stacionarno kretanje vozila u krivini - upravljivost vozila
Upravljivost vozila je mera podudarnosti stvarnog pravcakretanja vozila sa pravcem de�nisanim uglom upravlja£kihto£kova za ugao bo£nog klizanja α = 0, u slu£aju stacionarnogobrtanja (konstantna brzina, ugaona brzina i radijus kivine)
U odnosu na ugao okretanja upravlja£kih to£kova δ, vozilo seu odnosu na slu£aj α = 0 kre¢e:
po krivini odgovaraju¢eg polupre£nika (neutralna upravljivost,K=0)po krivini ve¢eg polupre£nika, odn. po "blaºoj krivini"(podupravljivost, K<0)po krivini manjeg polupre£nika, odn. po "o²trijoj krivini"(nadupravljivost, K>0)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
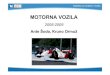
Faktor stabilnosti K - promena sa brzinom vx10. Vehicle Planar Dynamics 629
[ ]/xv m s
Sκ
K 0>
K 0<
K 0=
FIGURE 10.19. Comarison of the curvature response Sκ for a car withK = 1.602× 10−3, K = −2.21× 10−4, and K = 0.
the speed vx is equal to the following critical value
vc =
r− 1K
(10.309)
thenSκ →∞ (10.310)
and any decrease in steering angle cannot keep the path. When vx = vc, thecurvature κ is not a function of steering angle δ, and any radius of rotationis possible for a constant δ. The critical speed makes the system unstable.Controlling an oversteer vehicle gets harder by vx → vc and becomes un-controllable when vx = vc.The critical speed of an oversteer car with the characteristics
Cαf = 57296N/ rad (10.311)
Cαr = 52712N/ rad (10.312)
m = 1400 kg ≈ 95.9 slug (10.313)
a1 = 125 cm ≈ 4.1 ft (10.314)
a2 = 130 cm ≈ 4.26 ft (10.315)
is
vc =
r− 1K= 67.33m/ s (10.316)
because
K =m
l2
µa2Cαf
− a1Cαr
¶= −2.2059× 10−4. (10.317)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Negativan faktor stabilnosti K<0 - "Understeer"
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Pozitivan faktor stabilnosti K>0 - "Oversteer"
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Stacionarno kretanje vozila u krivini - kriti£na brzina
Ako je K < 0, kako je
Sκ =1
`
1
1 +Kv2x
onda se Sκ pove¢ava sa pove¢anjem brzine vx
Ugao okretanja to£ka treba da se smanji da bi sa zadrºalaputanja sa konstantnim radijusom
Kada je 1 +Kv2x = 0 , odn. kada je
vx = vcr =
√− 1
K
onda Sκ →∞ i u pitanju je kriti£na brzinaS.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Stacionarno kretanje vozila u krivini - kriti£na brzina
Kada je vx = vcr nikakvo smanjenje ugla okretanja to£ka nemoºe da zadrºi vozilo na putanji
Krivina tada nije funkcija ugla okretanja to£ka i bilo kojiradijus R je mogu¢ za konstantan ugao okretanja δ
Kriti£na brzina zna£i da je sistem nestabilan
Kontrola vozila sa K < 0 ("oversteer") postaje teºa zavx → vcr, a za vx = vcr vozilo postaje nekontrolabilno
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - ustaljeno okretanje
Stacionarno kretanje vozila u krivini - kriti£na brzina
Primer numeri£kih podataka:
Cα,f = 57.3 [kN/rad]
Cα,r = 52.7 [kN/rad]
m = 1400 [kg]
a1 = 1.25 [m] a2 = 1.30 [m]
Dobija se K = −2.2059× 10−4, pa je kriti£na brzina
vcr =
√− 1
K= 67.3 [m/s] = 242.4 [km/h]
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Sadrºaj
1 Kretanje vozila u ravniDiferencijalne jedna£ine kretanjaVremenski odgovor
2 Analiza vibracija vozilaVe²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Diferencijalne jedna£ine kretanja
Da bi se analiziralo pona²anje vozila tokom vremena i kako ¢eda se reaguje u zavisnosti od promene upravljanja δ = δ(t),mora da se re²i spregnut sistem jedna£ina kretanja:
vx =1
mFx + rvy (29)
{vyr
}=
[Cβmvx
Crm − vx
DβJzvx
DrJz
]{vyr
}+
{CδmDδIz
}δ(t) (30)
Re²avanjem jedna£ina se dolazi do vremenskog odgovora vozila
vx = vx(t) vy = vy(t) r = r(t)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Diferencijalne jedna£ine kretanjaVremenski odgovor
Model vozila sa dva to£ka - "Model bicikla"
Diferencijalne jedna£ine kretanja
Ako se pretpostavi voºnja sa konstantnom brzinom vx, onda jejedna£ina (29) jednostavnija:
Fx = −mr vy (31)
Jedna£ine (30) su nezavisne od jedna£ine (31) i mogu da sepi²u u obliku
q = Aq + u (32)
gde je:
q =
{vyr
}u =
{CδmDδIz
}δ(t) (33)
dok je matrica A data sa (17)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Sadrºaj
1 Kretanje vozila u ravniDiferencijalne jedna£ine kretanjaVremenski odgovor
2 Analiza vibracija vozilaVe²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Ve²anje drumskih vozila
Osnovni ciljevi ve²anja vozila
Preno²enje gravitacionog optere¢enja
Obezbe�ivanje korektnog poloºaja to£kova
Kontrola pravca kretanja vozila
Obezbe�ivanje kontakta to£kova sa drumom
Smanjenje efekta udarnih sila tokom voºnje
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Ve²anje drumskih vozila
Osnovni elementi sistema ve²anja vozila
Elementi za vo�enje
- poluge- vezni ²tapovi- lisnate opruge
Elementi koji proizvode sile
- spiralne opruge i druge opruge (vazdu²ne, lisnate)- viskozni prigu²iva£i- "anti-roll" osovine (stabilizatori protiv okretanja)
Gume
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Sistemi ve²anja kod vozila
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Sistemi ve²anja kod vozila
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Razne opruge kao sistemi ve²anja
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Elasti£ne opruge i sile veze
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Ve²anje drumskih vozila
Sila u elasti£noj opruzi
Osnovne karakteristike elasti£ne opruge:
- duºina opruge u nenapregnutom stanju- koe�cijent krutosti opruge k(sila koja izaziva jedini£no pomeranje opruge u odnosu nanenapregnuto stanje)
Sila u linearno elasti£noj opruzi
Fop = k · x
gde je x pomeranje u odnosu na nenapregnuto stanje
Sila u opruzi je restituciona sila: teºi da vrati oprugu unenapregnuto stanje
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Ve²anje drumskih vozila
Sila u elasti£noj opruzi
Ako je opruga nelinearno elasti£na onda je
Fop = f(x)
gde je f(x) neka funkcija pomeranja x
Po prestanku delovanja aktivne sile, opruga se vra¢a unenapregnuto stanje (elasti£na opruga)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Viskozni prigu²iva£ (sa jednom cevi)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Ve²anje drumskih vozila
Sila u viskoznom prigu²iva£u
Viskozni prigu²iva£ proizvodi silu otpora zavisnu od brzine
Fd = Fd(v)
gde je v brzina prigu²iva£a
Osnovna karakteristika viskoznog prigu²iva£a je funkcija Fd(v)
Smer sile viskoznog prigu²iva£a je suprotan od brzine
Obi£no se posmatra linearan prigu²iva£:
Fd = c v
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Elasti£na opruga i viskozni prigu²iva£
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Sadrºaj
1 Kretanje vozila u ravniDiferencijalne jedna£ine kretanjaVremenski odgovor
2 Analiza vibracija vozilaVe²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
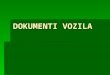
Model bicikla u analizi vibracija 13. Vehicle Vibrations 853
a1a2
x
C
m
y2 y1
θ
m1m2
FIGURE 13.9. A bicycle vibrating model of a vehicle.
Searching for the first-unit expression of u1 and u2 provides the followingmode shapes.
u1 =
∙1
−3.1729× 10−3¸
(13.200)
u2 =
∙1
0.157 58
¸(13.201)
Therefore, the free vibrations of the quarter car is
x =nXi=1
ui (Ai sinωit+Bi cosωit) i = 1, 2 (13.202)∙xsxu
¸=
∙1
−3.1729× 10−3¸(A1 sin 8.8671t+B1 cos 8.8671t)
+
∙1
0.157 58
¸(A2 sin 55.269t+B2 cos 55.269t) (13.203)
13.4 Bicycle Car and Body Pitch Mode
Quarter car model is excellent to examine and optimize the body bouncemode of vibrations. However, we may expand the vibrating model of avehicle to include pitch and other modes of vibrations as well. Figure 13.9illustrates a bicycle vibrating model of a vehicle. This model includes thebody bounce x, body pitch θ, wheels hop x1 and x2 and independent roadexcitations y1 and y2.The equations of motion for the bicycle vibrating model of a vehicle are
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model bicikla u analizi vibracija 13. Vehicle Vibrations 855
a1a2
x
y2 y1
m1m2
Cm, θIy
kt2 kt1
k2 k1 c1c2 x1x2
FIGURE 13.10. Bicycle model for a vehicle vibrations.
the Lagrange method. The kinetic and potential energies of the system are
K =1
2mx2 +
1
2m1x
21 +
1
2m2x
22 +
1
2Iz θ
2(13.208)
V =1
2kt1 (x1 − y1)
2+1
2kt2 (x2 − y2)
2
+1
2k1 (x− x1 − a1θ)
2 +1
2k2 (x− x2 + a2θ) (13.209)
and the dissipation function is
D =1
2c1
³x− x1 − a1θ
´2+1
2c2
³x− x2 + a2θ
´. (13.210)
Applying Lagrange method
d
dt
µ∂K
∂qr
¶− ∂K
∂qr+
∂D
∂qr+
∂V
∂qr= fr r = 1, 2, · · · 4 (13.211)
provides the following equations of motion (13.204)-(13.207). These set ofequations may be rearranged in a matrix form
[m] x+ [c] x+ [k]x = F (13.212)
where,
x =
⎡⎢⎢⎣xθx1x2
⎤⎥⎥⎦ (13.213)
[m] =
⎡⎢⎢⎣m 0 0 00 Iz 0 00 0 m1 00 0 0 m2
⎤⎥⎥⎦ (13.214)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
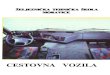
Model polovine vozila u analizi vibracija13. Vehicle Vibrations 859
y2m2 y1
m1
Cm, Ix
b1b2
x
ϕ
FIGURE 13.11. A half car vibrating model of a vehicle.
This model includes the body bounce x, body roll ϕ, wheels hop x1 and x2and independent road excitations y1 and y2.The equations of motion for the half car vibrating model of a vehicle are
as follow.
mx+ c (x− x1 + b1ϕ) + c (x− x2 − b2ϕ)
+k (x− x1 + b1ϕ) + k (x− x2 − b2ϕ) = 0 (13.234)
Ixϕ+ b1c (x− x1 + b1ϕ)− b2c (x− x2 − b2ϕ)
+b1k (x− x1 + b1ϕ)− b2k (x− x2 − b2ϕ) + kRϕ = 0 (13.235)
m1x1 − c (x− x1 + b1ϕ) + kt (x1 − y1)
−k (x− x1 + b1ϕ) = 0 (13.236)
m2x2 − c (x− x2 − b2ϕ) + kt (x2 − y2)
−k (x− x2 − b2ϕ) = 0 (13.237)
The half car model may be different for the front half and rear half due todifferent suspensions and mass distribution. Furthermore, different antirollbars with different torsional stiffness may be used in the front and rearhalves.Proof. Figure 13.12 shows a better vibrating model of the system. Thebody of the vehicle is assumed to be a rigid bar. This bar has a mass m,which is the front or rear half of the total body mass, and a longitudinalmass moment of inertia Ix, which is half of the total body mass momentof inertia. The left and right wheels have a mass m1 and m2 respectively,although they are usually equal. The tires stiffness are indicated by kt.Damping of tires are much smaller than the damping of shock absorbersso, we may ignore the tire damping for simpler calculation. The suspensionof the car has stiffness k and damping c for the left and right wheels. It
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model polovine vozila u analizi vibracija860 13. Vehicle Vibrations
y2
m2
y1
m1
b1b2
x
m, Ix
x2
ϕC
kt
k c
kt
kc x1kR
FIGURE 13.12. Half car model for a vehicle vibrations.
is common to make the suspension of the left and right wheels mirror.So, their stiffness and damping are equal. However, the half car model hasdifferent k, c, and kt for front or rear.The vehicle may also have an antiroll bar with a torsional stiffness kR in
front and or rear. Using a simple model, the antiroll bar provides a torqueMR proportional to the roll angle ϕ.
MR = −kRϕ (13.238)
However, a better model of the antiroll bar effect is
MR = −kRµϕ− x1 − x2
w
¶. (13.239)
To find the equations of motion for the half car vibrating model, we usethe Lagrange method. The kinetic and potential energies of the system are
K =1
2mx2 +
1
2m1x
21 +
1
2m2x
22 +
1
2Ixϕ
2 (13.240)
V =1
2kt (x1 − y1)
2 +1
2kt (x2 − y2)
2 +1
2kRϕ
2
+1
2k (x− x1 + b1ϕ)
2+1
2k (x− x2 − b2ϕ) (13.241)
and the dissipation function is
D =1
2c (x− x1 + b1ϕ)
2+1
2c (x− x2 − b2ϕ) . (13.242)
Applying the Lagrange method
d
dt
µ∂K
∂qr
¶− ∂K
∂qr+
∂D
∂qr+
∂V
∂qr= fr r = 1, 2, · · · 4 (13.243)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model kompletnog vozila u analizi vibracija
13
Vehicle VibrationsVehicles are multiple-DOF systems as the one that is shown in Figure 13.1.The vibration behavior of a vehicle, which is called ride or ride comfort, ishighly dependent on the natural frequencies and mode shapes of the vehicle.In this chapter, we review and examine the applied methods of determiningthe equations of motion, natural frequencies, and mode shapes of differentmodels of vehicles.
x
ϕθ
FIGURE 13.1. A full car vibrating model of a vehicle.
13.1 Lagrange Method and Dissipation Function
Lagrange equation,
d
dt
µ∂K
∂qr
¶− ∂K
∂qr= Fr r = 1, 2, · · ·n (13.1)
or,d
dt
µ∂L∂qr
¶− ∂L
∂qr= Qr r = 1, 2, · · ·n (13.2)
as introduced in Equations (9.243) and (9.298), can both be applied tofind the equations of motion for a vibrating system. However, for smalland linear vibrations, we may use a simpler and more practical Lagrange
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model kompletnog vozila u analizi vibracija
13. Vehicle Vibrations 867
θ
ϕ
x
y2m4ktf
kf
y1
x1 y3
cr
y4
x4
m, Ix, Iy
m2
ktfktr
ktr
kfkr
cf
cf
kRf
m1
x2 kRr
a1
b2a2b1
FIGURE 13.14. Full car model for a vehicle vibrations.
However, a better model of the antiroll bar reaction is
MR = −kRfµϕ− x1 − x2
wf
¶− kRf
µϕ− x4 − x3
wr
¶. (13.280)
Most cars only have an antiroll bar in front. For these cars, the moment ofthe antiroll bar simplifies to
MR = −kRµϕ− x1 − x2
w
¶(13.281)
if we use
wf ≡ w = b1 + b2 (13.282)
kRf ≡ kR. (13.283)
To find the equations of motion for the full car vibrating model, we usethe Lagrange method. The kinetic and potential energies of the system are
K =1
2mx2 +
1
2Ixϕ
2 +1
2Iy θ
2
+1
2mf
¡x21 + x22
¢+1
2mr
¡x23 + x24
¢(13.284)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Sadrºaj
1 Kretanje vozila u ravniDiferencijalne jedna£ine kretanjaVremenski odgovor
2 Analiza vibracija vozilaVe²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model £etvrtine vozila u analizi vibracija
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model £etvrtine vozila u analizi vibracija
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model £etvrtine vozila u analizi vibracija
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model £etvrtine vozila u analizi vibracija - zadatak
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model £etvrtine vozila u analizi vibracija - zadatak
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model £etvrtine vozila u analizi vibracija - zadatak
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model £etvrtine vozila u analizi vibracija - zadatak
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Sadrºaj
1 Kretanje vozila u ravniDiferencijalne jedna£ine kretanjaVremenski odgovor
2 Analiza vibracija vozilaVe²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model bicikla u analizi vibracija - zadatak13. Vehicle Vibrations 855
a1a2
x
y2 y1
m1m2
Cm, θIy
kt2 kt1
k2 k1 c1c2 x1x2
FIGURE 13.10. Bicycle model for a vehicle vibrations.
the Lagrange method. The kinetic and potential energies of the system are
K =1
2mx2 +
1
2m1x
21 +
1
2m2x
22 +
1
2Iz θ
2(13.208)
V =1
2kt1 (x1 − y1)
2+1
2kt2 (x2 − y2)
2
+1
2k1 (x− x1 − a1θ)
2 +1
2k2 (x− x2 + a2θ) (13.209)
and the dissipation function is
D =1
2c1
³x− x1 − a1θ
´2+1
2c2
³x− x2 + a2θ
´. (13.210)
Applying Lagrange method
d
dt
µ∂K
∂qr
¶− ∂K
∂qr+
∂D
∂qr+
∂V
∂qr= fr r = 1, 2, · · · 4 (13.211)
provides the following equations of motion (13.204)-(13.207). These set ofequations may be rearranged in a matrix form
[m] x+ [c] x+ [k]x = F (13.212)
where,
x =
⎡⎢⎢⎣xθx1x2
⎤⎥⎥⎦ (13.213)
[m] =
⎡⎢⎢⎣m 0 0 00 Iz 0 00 0 m1 00 0 0 m2
⎤⎥⎥⎦ (13.214)
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model £etvrtine vozila u analizi vibracija - zadatak
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model polovine vozila u analizi vibracija
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model polovine vozila - podaci o masi
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Prikazivanje puta u analizi kretanja vozila
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model puta sa paralelnim trakama
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Model deterministi£kih prepreka na putu
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Merenje vibracija pri voºnji preko prepreka
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Statisti£ki model pro�la puta
S.�ori¢ Mehanika voºnje

Kretanje vozila u ravniAnaliza vibracija vozila
Ve²anje drumskih vozilaRa£unski modeli u analizi vibracijaRa£unski model £etvrtine vozilaRa£unski model polovine vozila
Detaljno merenje pro�la puta
S.�ori¢ Mehanika voºnje