Embed Size (px)
Citation preview
Método de Painel para o Cálculo do Escoamento Potencial em
Torno de Vários Perfis Sustentadores
Diogo de Arriaga e Cunha Matos Chaves
Dissertação para obtenção do Grau de Mestre em
Engenharia Mecânica
Júri
Presidente: Professor Doutor Mário Manuel Gonçalves da Costa
Orientador: Professor Doutor Luís Rego da Cunha Eça
Vogal: Professor Doutor João Manuel de Melo e Sousa
Outubro de 2012

ii
iii
Agradecimentos
Ao professor Luís Eça por toda a disponibilidade, orientação e apoio dado durante a
elaboração da dissertação.

iv

v
Resumo
Neste trabalho efetuou-se uma implementação em ambiente MATLAB de um método de painel 2D para
aplicações a hiper-sustentadores e perfis sob efeito solo. O código teve como base um código original
apenas para perfis simples implementado na linguagem de programação FORTRAN utilizando um
método de 1ª ordem com fontes e vórtices de intensidade constante e painéis rectos. A descrição
detalhada do método utilizado é incluída, assim como a metodologia seguida na criação do código.
Efetuou-se uma extensa verificação do código, primeiro para perfis simples e depois para multi-
componentes, a fim de se quantificar ordem de convergência do erro numérico do código e a incerteza
dos resultados. Mostram-se também vários exemplos de possíveis aplicações do programa, onde se
compararam resultados obtidos com o código desenvolvido com alguns resultados experimentais e
outros provenientes de cálculos de CFD disponíveis na literatura específica da área. No que diz respeito
ao efeito solo, constatou-se que os resultados do coeficiente de sustentação e da distribuição de
pressão seguem em geral as mesmas tendências que os casos sujeitos a análise, concluindo-se que o
código é ideal para análises qualitativas, sendo também ideal para ser utilizado em optimizações de
geometrias e orientações relativas entre corpos sustentadores.
Palavras-Chave: Método de Painel, Multi-Componente, Efeito solo, Hiper-Sustentadores.

vi
Abstract
An implementation in MATLAB of a 2D panel method was performed for use in applications with airfoils
in ground effect and multi-element configurations. The code was based on an earlier code developed in
the FORTRAN language, using a 1st
order panel method that followed an implementation with constant
source and vortex strengths and flat panels. The description of the method used is included, as is the
methodology used in the development of the code. An extensive verification procedure to quantify the
uncertainty and the error convergence was performed both for single airfoils and for multi-element
configurations. Also, several examples of possible applications of the program were analyzed, where the
results obtained with the developed code were compared with some experimental and CFD results
available in relevant papers. Regarding profiles in ground effect, it is demonstrated that the trends of
the lift coefficient and pressure distribution results follow those of the experimental or CFD results,
making this code an ideal tool for qualitative analyses and optimization of geometries and relative
orientations between airfoils.
Keywords: Panel Method, Multi-Element, Ground Effect, High-Lift Devices
vii
Índice
Agradecimentos ........................................................................................................................... iii
Resumo .......................................................................................................................................... v
Abstract .........................................................................................................................................vi
Índice de Figuras ........................................................................................................................... ix
Índice de Tabelas ........................................................................................................................... xi
Lista de Abreviaturas .................................................................................................................... xii
1. Introdução ............................................................................................................................. 1
2. Formulação Matemática ....................................................................................................... 5
2.1. Formulação Básica ......................................................................................................... 5
2.2. Método de Hess & Smith ............................................................................................. 10
2.2.1. Equações da velocidade em cada painel .......................................................... 15
2.2.2. Cálculo dos coeficientes de influência .............................................................. 16
2.2.3. Equações de velocidade normal nula na superfície do corpo ........................ 20
2.2.4. Equação da condição de Kutta .......................................................................... 21
2.2.5. Resolução do sistema de equações para as incógnitas e . ........................ 23
2.2.6. Cálculo das velocidades tangenciais em cada ponto de controlo .................. 23
2.2.7. Cálculo dos coeficientes de pressão em cada ponto de controlo. .................. 24
2.2.8. Cálculo dos coeficientes adimensionais ........................................................... 24
2.3. Introdução da circulação no ASA 2D ........................................................................... 26
2.4. Extensão do método para múltiplos componentes .................................................... 29
2.4.1. Cálculo das velocidades tangenciais e do coeficiente de pressão ...................... 30
2.4.2. Cálculo dos coeficientes adimensionais .............................................................. 31
3. Organização do Método de Cálculo .................................................................................... 33
3.1. Pré-processador .......................................................................................................... 33
3.1.1. Malha de pontos gerados externamente ............................................................ 33
3.1.2. Geração de um perfil NACA da série de 4 dígitos ............................................... 33
3.1.3. Geração de um perfil de Kármán-Trefftz e de Joukowski ................................... 35
3.1.4. Sistema de eixos local e sistema de eixos global ................................................ 37
3.2. Processador ................................................................................................................. 40
3.2.1. Cálculo com Efeito solo ....................................................................................... 40
3.2.2. Cálculo sem Efeito solo ....................................................................................... 41
3.3. Pós-processador .......................................................................................................... 41
viii
3.3.1. Cálculo das velocidades em pontos de uma malha ............................................ 42
3.3.2. Visualização das linhas de corrente do escoamento .......................................... 43
3.3.3. Visualização da distribuição de velocidade em torno dos perfis ........................ 43
3.3.4. Visualização da distribuição dos coeficientes de pressão em torno do perfis .... 44
3.3.5. Visualização dos vetores de velocidade do escoamento .................................... 44
3.3.6. Visualização das distribuições de pressão de cada perfil .................................... 45
3.3.7. Escrita dos resultados obtidos num ficheiro ....................................................... 45
4. Verificação do código .......................................................................................................... 47
4.1. Verificação para Perfis Simples ................................................................................... 47
4.1.1. Procedimento de verificação .............................................................................. 47
4.1.2. Casos teste .......................................................................................................... 48
4.1.3. Parâmetros Seleccionados .................................................................................. 48
4.1.4. Resultados ........................................................................................................... 51
4.2. Verificação para Multi-Componente ........................................................................... 61
4.2.1. Procedimento de verificação .............................................................................. 61
4.2.2. Casos Teste .......................................................................................................... 61
4.2.3. Resultados ........................................................................................................... 62
5. Aplicações Práticas .............................................................................................................. 65
5.1. Perfis sujeitos a Efeito solo ......................................................................................... 65
5.1.1. Perfil NACA 0015 ................................................................................................. 66
5.1.2. Perfil NACA 4412 ................................................................................................. 67
5.1.3. Perfil NACA 0012 ................................................................................................. 71
5.1.4. Perfil Tyrrell026 invertido ................................................................................... 72
5.2. Turbina de Eixo Vertical com Rotor Duplo .................................................................. 74
6. Conclusões........................................................................................................................... 79
Bibliografia .................................................................................................................................. 80
ix
Índice de Figuras
Figura 1 - Fronteira S e volume V ................................................................................................................ 5
Figura 2 - Região de integração .................................................................................................................... 6
Figura 3 - Definição da circunferência em torno do ponto P ....................................................................... 8
Figura 4 - Escoamento não circulatório ...................................................................................................... 11
Figura 5 - Escoamento de um vórtice puro ................................................................................................ 11
Figura 6 - Escoamento que satisfaz a condição de Kutta ........................................................................... 12
Figura 7 - Discretização dos painéis ............................................................................................................ 13
Figura 8 - Nomenclatura utilizada nos painéis ........................................................................................... 13
Figura 9 - Definição de um ponto de controlo ........................................................................................... 14
Figura 10 - Bordo de Fuga do perfil ............................................................................................................ 15
Figura 11 - Sistema de coordenadas local e global ..................................................................................... 16
Figura 12 - Nomenclatura utilizada na construção das matrizes de influência .......................................... 18
Figura 13 - Forças actuantes no perfil em função do ângulo de ataque .................................................... 25
Figura 14 - Comparação entre resultados com métodos diferentes .......................................................... 27
Figura 15 – Vista em pormenor da distribuição de pressão no bordo de fuga .......................................... 27
Figura 16 - Discretização da linha média do perfil ..................................................................................... 28
Figura 17 - Perfil NACA 4412 com 80 painéis ............................................................................................. 35
Figura 18 - Círculo gerador da transformação conforme ........................................................................... 36
Figura 19 - Círculo Gerador 61 pontos ....................................................................................................... 37
Figura 20 - Perfil Plano transformado 61 pontos ....................................................................................... 37
Figura 21 - Sistema de Eixos Global para Perfil Simples ............................................................................. 37
Figura 22 - Sistema de Eixos Global e Local ................................................................................................ 38
Figura 23 - Exemplo de Transformação de Coordenadas de dois perfis .................................................... 39
Figura 26 - Exemplo de criação de uma imagem de um perfil simples ...................................................... 40
Figura 27 - Exemplo de criação de uma imagem de um perfil simples com rotação ................................. 41
Figura 28 - Criação de uma malha de pontos em torno do corpo. ............................................................. 42
Figura 29 - Linhas de corrente em torno de um perfil invertido com hiper-sustentador em efeito solo .. 43
Figura 30 - Mapa de cores da velocidade no escoamento. ........................................................................ 44
Figura 31 - Mapa de cores dos coeficientes de pressão ............................................................................. 44
Figura 32 - Vista em pormenor dos vetores de velocidade numa região do escoamento ......................... 45
Figura 33 - Distribuição de pressão do perfil principal ............................................................................... 45
Figura 34 - Distribuição de pressão do hiper-sustentador ......................................................................... 45
Figura 33 - Ilustração do método para se encontrar o ponto mais próximo do ponto de controlo .......... 49
Figura 34 - Nomenclatura utilizada ............................................................................................................ 50
Figura 35 - Resultados obtidos para o perfil Kármán-Trefftz simétrico. ..................................................... 52
Figura 36 - Resultados obtidos para o perfil Kármán-Trefftz com flecha. .................................................. 53
x
Figura 37 - Resultados obtidos para o perfil Joukowski com flecha. .......................................................... 54
Figura 38 - Resultados da norma L1 para o perfil Joukowski com flecha ................................................... 55
Figura 39 - Comparação das distribuições de pressão analitica e numérica .............................................. 56
Figura 40 - Pormenor do pico de sucção .................................................................................................... 56
Figura 41 - Resultados obtidos para o perfil Joukowski simétrico ............................................................. 57
Figura 42 - Tendência de evolução do erro numérico do perfil de Joukowski simétrico ........................... 58
Figura 43 - Resultados obtidos para o perfil NACA 5412 ............................................................................ 59
Figura 49 - Coeficiente de Sustentação em função de h/c para =2 ........................................................ 62
Figura 46 - Incerteza de CL para NACA 0015 com h/c=0.2 e =0 ............................................................. 63
Figura 47 - Incerteza de CL para NACA 4412 com h/c=0.1 e α=2° .............................................................. 64
Figura 48 - Incerteza de CL para NACA 4412 com h/c=0.5 e α=6° .............................................................. 64
Figura 48 – Definições da distância ao solo ................................................................................................ 66
Figura 49 - Resultados para o NACA 0015, =0 ........................................................................................ 66
Figura 50 - Resultados para o NACA 4412 .................................................................................................. 67
Figura 51- Fig. 13 da referência [26]. Efeito de h/c no coeficiente de sustentação de um perfil NACA 4412
.................................................................................................................................................................... 68
Figura 52 - Efeito de h/c no coeficiente de sustentação de um perfil NACA 4412..................................... 69
Figura 53 - Distribuição de pressão do NACA 4412 .................................................................................... 70
Figura 54 - Resultados para o perfil NACA 0012 ......................................................................................... 71
Figura 55 - Geometria do perfil Tyrrell026 ................................................................................................. 72
Figura 56 - Resultados para o perfil Tyrrell026 a =3.6 ............................................................................ 73
Figura 57 - 5 Configurações dos Perfis objeto de análise ........................................................................... 74
Figura 58 - CL vs para as várias configurações possíveis ......................................................................... 75
Figura 59 - CP vs para as várias configurações possíveis ........................................................................ 75
Figura 60 - CP vs CL para as várias configurações possíveis ....................................................................... 76
Figura 61 - Distribuições de pressão para o 1º e 2º perfil respectivamente .............................................. 77
Figura 62 - Linhas de corrente e mapa de velocidades para configuração 1, =8 ................................... 77
xi
Índice de Tabelas
Tabela 1 – Resultados de CL calculados pelos dois métodos alternativos ................................................. 27
Tabela 2 - Casos teste para verificação do código para perfil simples ....................................................... 48
Tabela 3 – Casos teste utilizados na verificação para multi-componente ................................................. 62
Tabela 4 - Resultados incerteza para os perfis analisados ......................................................................... 63
Tabela 5 - Coordenadas das Várias Configurações em Análise .................................................................. 74
xii
Lista de Abreviaturas
– Coeficiente de sustentação obtido pela circulação
– Coeficiente de sustentação obtido pela integração
– Coeficiente de resistência obtido pela integração
– Coeficiente de pressão
– Coeficiente de momento em torno do centro do perfil
– Ângulo de ataque
– Comprimento da corda do perfil
– Comprimento da corda do perfil principal
2D – Bidimensional
3D – Tridimensional
CFD – Mecânica dos fluidos computacional
– Velocidade do escoamento uniforme
– Componentes da velocidade nas direcções e
– Influência do painel no painel devido a uma fonte
– Influência do painel no painel devido a um vórtice
– Potencial do escoamento uniforme
– Ângulo do painel em relação ao eixo
– Número de painéis de um perfil
– Intensidade da fonte no painel
– Intensidade do vórtice
– Comprimento do painel da linha média
– Intensidade do vórtice corrigida
– Vetor relacionado com o escoamento uniforme
– Matriz dos coeficientes de influência na direcção normal
– Matriz dos coeficientes de influência na direcção tangencial
– Matriz que contém as matrizes individuais
– Vetor que contém as singularidades de cada corpo
– Vector que contém os vetores individuais
– Matriz que contém as matrizes individuais
– Vetor das velocidades tangenciais devido às singularidades
– Comprimento do painel de superfície
– Coordenada do ponto de fronteira
– Coordenada do ponto de fronteira
– Integração da pressão na direcção
– Integração da pressão na direcção
xiii
– Componente do momento na direcção
– Componente do momento na direcção
– Distribuição de espessura para um perfil NACA da série de 4 dígitos
– Distribuição de curvatura para um perfil NACA da série de 4 dígitos
BA – Bordo de ataque
BF – Bordo de fuga
, – Coeficientes de influência no ponto devido a uma singularidade na direcção and
– Declive de um determinado painel
– Declive da normal de um determinado painel
( ) – Função que procura o ponto analítico mais próximo do perfil discretizado
– Norma do erro numérico do coeficiente de pressão
⁄ – Distância à parede adimensionalizada pela corda do perfil
– Erro numérico para a malha zero
– Parâmetro de refinamento da malha
– Ordem de convergência observada
– Constante
– Erro numérico de

xiv
1
1. Introdução
Uma das primeiras implementações de mecânica dos fluidos computacional tornada possível pelo
aparecimento dos computadores foram os chamados métodos de painel. Estes métodos, que
apareceram por volta da década de sessenta do século passado, tornaram possível o cálculo de
escoamentos em torno de geometrias arbitrárias complexas através da discretização da superfície do
corpo em segmentos de recta, posterior distribuição de singularidades pela superfície do corpo e
resolução da equação de Laplace [1] como um somatório das contribuições das singularidades em cada
painel. Estes métodos podem ser aplicados a uma grande gama de geometrias – incluindo vários corpos
inseridos no mesmo problema – e têm a possibilidade de se uma boa precisão numérica com um
reduzido número de painéis. Além disso, efectuando cálculos com corpos sustentadores a pequenos
ângulos de ataque, obtém-se uma concordância muito boa com o escoamento real, mesmo sem se
considerar a camada limite.
Quando surgiram os primeiros computadores com capacidade para efetuar cálculos de escoamento
potencial, os cálculos bidimensionais invíscidos foram os que primeiro foram alvo de estudo, tendo-se
desenvolvido vários programas comerciais com base em vários métodos, entre eles, o método dos
painéis desenvolvido por Hess, J. e Smith, A. [2]. Mais tarde, com a evolução das capacidades de cálculo
dos computadores, houve uma clara tendência para se concentrarem esforços no desenvolvimento de
programas de cálculo para geometrias tridimensionais e, paralelamente, no desenvolvimento de códigos
de cálculo viscoso pelas maiores capacidades de previsão das características dos escoamentos reais que
quer um tipo quer outro consegue fornecer. Os cálculos invíscidos a duas dimensões foram então
perdendo importância em detrimento dos a três dimensões e dos de cálculo viscoso, quer numa
questão de esforços de desenvolvimento de métodos de cálculo distintos, quer também em termos de
utilização dos códigos já anteriormente desenvolvidos. Contudo, embora os resultados de métodos de
cálculo mais evoluídos se aproximem mais das condições de um escoamento real, são poucas as
aplicações destes programas que não beneficiem de um cálculo prévio com um método de painel a duas
dimensões [3], não só pela grande precisão numérica e facilidade de uso deste método
comparativamente a qualquer outro método mais complexo, mas também pela grande correlação que
se consegue alcançar entre os resultados obtidos por este método e os resultados obtidos por outros
métodos mais pesados, fornecendo uma boa estimativa preliminar da solução a uma fracção muito
reduzida do elevado tempo de cálculo que outros métodos mais complexos inevitavelmente consomem.
Deste modo, apesar de hoje em dia existirem programas de CFD já muito avançados que contemplam
escoamentos turbulentos e ocorrências de separação, métodos tão simples como o método de painel
bidimensional ainda são utilizados em situações em que não interessa tanto saber o valor exacto do
coeficiente de sustentação ou obter a distribuição de pressão exacta em torno de perfis, mas sim saber
2
estimativas e tendências de variação daqueles parâmetros consoante as condições do cálculo. Tomando
como exemplo situações de efeito solo, saber como varia o parâmetro
pode ser suficiente
para alguns estudos preliminares no design de certas geometrias, algo que, como se verá
posteriormente, este método consegue captar facilmente. Embora no final do século passado tenham
sido efectuados diversos estudos com métodos de painel aplicados a asas dianteiras duplas de carros de
Fórmula 1 por Katz, J. [4] [5] [6] [7] e Knowles et al [8] (ver tab. 1 em [9]), hoje em dia estudos mais
aprofundados sobre o efeito solo são efectuados com códigos CFD mais complexos. No entanto, uma
vez que os métodos de painel são extremamente rápidos quando comparados com outros métodos
mais complexos, podem ser por exemplo utilizados em algoritmos genéticos para optimizações de
design de corpos sustentadores em diversas situações. Como exemplo, Sun, S. et al [10] utilizou um
método de painel invíscido de 2ª ordem juntamente com um algoritmo genético para optimizar uma asa
dianteira sob efeito solo de um carro de Fórmula 1. No mesmo artigo [10], é citado que as razões pela
qual se utilizou um método de painel invíscido devem-se à sua versatilidade no cálculo de diversas
geometrias e pelo seu reduzido tempo de cálculo, condição essencial para se efectuar este tipo de
optimização num tempo aceitável. Outro procedimento de optimização da geometria de perfis em que
se utilizou um método de painel de 1ª ordem acoplado a um algoritmo genético é descrito por
Wickramasinghe, U. et al em [11].
Assim, dada a importância dos códigos de cálculo bidimensionais ainda nos dias de hoje, o
desenvolvimento deste trabalho consistiu na generalização de um programa de cálculo baseado num
método de painel bidimensional invíscido para permitir a sua utilização com multi-componentes, ou
seja, com vários corpos inseridos no mesmo escoamento. O objectivo principal foi o de fornecer um
programa fácil de utilizar, rápido e que representasse fielmente o escoamento real em torno de vários
perfis para situações em não ocorra separação do escoamento. A extensão do programa apresenta
várias vantagens em relação ao programa original, pois não só o programa pode ser aplicado ao cálculo
de um perfil isolado, mas possibilita também a aplicação a várias situações em que se tem mais do que
um perfil, tal como são os casos dos hiper-sustentadores e nos estudos do efeito solo, abrindo portas a
que este código seja utilizado em rotinas de optimização de geometrias e orientações relativas entre
corpos sustentadores, tal como referido nos exemplos do parágrafo anterior.
O programa original, chamado ASA 2D [12], utiliza fontes e vórtices de intensidade constante com base
no método desenvolvido por Hess & Smith [2] e originalmente estava escrito na linguagem de
programação FORTRAN. A parte inicial do trabalho desenvolvido foi a de reescrever o programa na
linguagem de programação MATLAB e de estudar a convergência do erro numérico para perfis simples,
comparando soluções exatas dadas pela transformação conforme com os resultados obtidos pelo
programa. A segunda parte do trabalho consistiu na extensão do código para o cálculo com múltiplos
componentes, tendo-se novamente efetuado uma extensa verificação do código, onde se mostra que
numa situação de efeito solo a solução tende para a do perfil isolado à medida que a distância à parede

3
aumenta e onde também se quantifica qual a incerteza associada ao cálculo para um determinado
número de painéis. A terceira e última parte consistiu na aplicação do programa a várias situações de
cálculos com mais de um perfil. O objectivo foi o de demonstrar a boa concordância dos resultados que
se obtêm com o código com resultados disponíveis na literatura, ao mesmo tempo que se dão a
conhecer possíveis aplicações deste programa. Efectuaram-se vários cálculos de corpos sustentadores
sob efeito solo, onde se demonstra que os resultados do parâmetro
para várias distâncias
ao solo é o mesmo que se obtém através de códigos CFD e com resultados experimentais. Efectuou-se
também um estudo de um rotor duplo de uma turbina de eixo vertical, onde, com o objectivo de reduzir
o pico de sucção máximo, mostrou-se que o programa pode ser utilizado para a optimização da
configuração ideal dos corpos sustentadores que compõem o rotor.

4
5
2. Formulação Matemática
2.1. Formulação Básica
Tal como referido na introdução, este trabalho baseou-se num método de painel, pelo que nesta secção
se fará primeiro uma exposição do modelo matemático por detrás destes métodos, baseada nas
descrições de Katz & Plotkin [1], Moran [13] e Mason [14].
O método dos painéis é uma técnica de solução aplicável à teoria de escoamento potencial, pelo que a
equação que rege a formulação matemática do método é a equação de Laplace, dada pela seguinte
expressão:
(2 - 1)
A equação acima é válida para um escoamento estacionário, incompressível e irrotacional, condições
que se verificam num escoamento de fluido perfeito. Embora haja várias formas de resolver esta
equação, o método utilizado neste caso é através de singularidades, funções algébricas que satisfazem a
equação de Laplace. As singularidades mais comuns são as fontes (e poços), os dipolos e os vórtices.
Uma vez que a equação é linear, é possível utilizar uma sobreposição de singularidades para se obter a
solução de um determinado escoamento.
Na teoria potencial clássica, algumas superfícies podem ser criadas a partir de singularidades localizadas
dentro dos corpos (exemplo do cilindro criado por um dipolo com origem no centro do círculo). No
entanto, para se criar uma forma arbitrária, tal não é possível. É necessária então uma abordagem mais
sofisticada para se determinar o escoamento potencial em torno de corpos de forma arbitrária.
Defina-se então um volume que contém um corpo cuja superfície é , visível na Figura 1.
Figura 1 - Fronteira S e volume V

6
Para resolver o problema, primeiramente é necessário definir as duas condições de fronteira. A primeira
dita que a componente normal da velocidade em qualquer superfície sólida tem de ser nula. A segunda
impõe que a velocidade do escoamento tenda para a velocidade do escoamento não perturbado à
medida que nos afastamos do corpo. As expressões seguintes descrevem respectivamente estas
condições:
(2 - 2)
(2 - 3)
Definidas as condições de fronteira, é necessário agora obter a equação do potencial que seja passível
de ser utilizada nos cálculos do método dos painéis. Para tal, aplica-se o teorema da divergência de
Gauss, que relaciona um integral de volume com um integral de superfície:
∭ ∯
(2 - 4)
O integral da equação (2 - 4) é aplicado ao problema interior, ou seja, ao interior de uma fronteira
arbitrária .
Figura 2 - Região de integração
Para começar a derivação, introduz-se o vector função de dois escalares, dado por:
(2 - 5)
Substituindo a equação (2 - 5) no teorema da divergência de Gauss (Eq. (2 - 4)) obtém-se:
7
∭ ( ) ∯( )
(2 - 6)
Utilizando agora a identidade vectorial para simplificar o lado esquerdo da
equação (2 - 6), e recordando que , obtém-se:
( ) ( ) ( )
(2 - 7)
Substituindo então na equação (2 - 6), obtém-se:
∭( ) ∯( )
(2 - 8)
Ou igualmente, recordando que
,
∭( ) ∯(
)
(2 - 9)
Chega-se assim a uma expressão conhecida por Teorema de Green de segunda ordem. A partir deste
ponto seria possível continuar o desenvolvimento da equação acima para uma situação a duas ou a três
dimensões. Uma vez que a implementação desenvolvida neste trabalho foi a duas dimensões, omitir-se-
á o desenvolvimento para o caso tridimensional.
Pode-se então agora substituir e por quantidades de interesse para se chegar a uma expressão para
o potencial que descreva o escoamento bidimensional. Assim, define-se e , onde é
uma função harmónica que satisfaz a equação de Laplace. O termo é uma singularidade do tipo
fonte – a duas dimensões –, onde é a distância a um determinado ponto . Substituindo agora e
pelas suas respectivas definições na equação principal e trocando os termos, obtém-se:
∮[ ( )]
∬[ ( )]
(2 - 10)
Onde é a região compreendida na superfície . Pela equação (2 - 1), é igual a zero, pelo que a
equação (2 - 10) reduz-se a:

8
∮[ ( )]
∬ ( )
(2 - 11)
Se um ponto for exterior a , então a expressão ( ) será nula em todo espaço, uma vez que
é uma fonte e satisfaz a equação de Laplace ( ). Assim, a expressão acima fica:
∯[ ( )]
(2 - 12)
No entanto, definiu-se a origem dentro da região , pelo que se estiver dentro de , então
( ) em . Para excluir o ponto da região de integração, define-se uma circunferência
de raio que engloba a origem, tal como na Figura 3.
Figura 3 - Definição da circunferência em torno do ponto P
Então, aplicando o integral à região entre e , obtém-se:
∮[ ( )]
⏟
∮[
]
⏟
(2 - 13)
Ou, passando o 2º termo para o membro direito
∮[
]
∮[ ]
(2 - 14)
Considerando o integral do membro esquerdo, fazendo e assumindo que a função é bem
comportada, será aproximadamente constante e logo
. Assim, é apenas necessário avaliar o
integral dado por:

9
∮
(2 - 15)
O qual será calculado ao longo da linha da circunferência onde . Para um círculo, o elemento de
linha é dado pela expressão:
(2 - 16)
Substituindo a expressão de no integral acima, obtém-se:
∮
∮
∮
(2 - 17)
Integrando de até , obtém-se:
∫
(2 - 18)
Obtendo-se finalmente o resultado final dado por:
∮[
]
(2 - 19)
Substituindo este resultado na expressão (2 - 14), obtém-se:
( )
∮[ ]
(2 - 20)
Com a expressão acima, o valor de em qualquer ponto dentro da região pode ser obtido
sabendo-se o valor de e de
na fronteira do corpo.
Até agora utilizou-se a região interior do corpo sólido para que se pudesse escrever a origem no ponto
. No entanto, esta equação pode ser estendida para a região exterior a . Aplicando a solução
encontrada entre a superfície do corpo e uma superfície arbitrária Σ que envolva e deixando esta
última tender para o infinito, os integrais sobre Σ tenderão para , ou seja, para o escoamento não
perturbado pelo corpo, tal como a 2ª condição de fronteira impõe. Assim, chega-se à expressão final do
potencial a duas dimensões para qualquer ponto do escoamento na região exterior ao corpo:

10
( )
∮[ ]
(2 - 21)
Na equação acima é a normal unitária que aponta no sentido exterior à superfície. Utilizando a regra
do produto interno da normal com o gradiente, obtém-se a expressão:
( )
∮ [
( )]
(2 - 22)
A equação acima está agora numa forma em que é possível interpretar o integral como uma função de
uma distribuição de singularidades. O primeiro termo do integral pode ser interpretado como o
potencial de uma fonte de intensidade
, enquanto o 2º termo pode ser interpretado como o potencial
de um dipolo de intensidade . A expressão final fica então:
( )
∮ [
]
(2 - 23)
O problema pode agora ser resolvido encontrando as intensidades das fontes e dos dipolos para uma
determinada geometria e determinadas condições do escoamento não perturbado, .
A principal conclusão da equação (2 - 23) é que é possível representar uma qualquer geometria
arbitrária a partir da sobreposição de fontes e dipolos distribuídos por painéis – segmentos de recta no
caso a duas dimensões – ao longo da sua superfície. No entanto, é preponderante que se certifique que
a superfície do corpo é totalmente fechada e que a normal à superfície aponta sempre para fora. Para
implementar este método, há várias formas de abordar o problema, sendo possível variar as
singularidades utilizadas, variar a intensidade das singularidades ao longo de cada painel e utilizar
diferentes geometrias dos painéis.
Embora haja várias abordagens possíveis aplicando a teoria acima exposta, o método utilizado no
desenvolvimento do código foi o já conhecido método de Hess & Smith [2], o qual será abordado em
detalhe na próxima secção.
2.2. Método de Hess & Smith
O método de Hess & Smith [2] foi a primeira forma do método dos painéis a ser implementada e foi
concretizada pelo matemático John Hess e pelo aerodinamicista A.M.O. Smith. A exposição do método
que se apresenta de seguida foi baseada nos textos de Hess [2], Moran [13] e Mason [14].
11
Neste método apenas se utilizam fontes e poços para se definir a forma de um corpo arbitrário, pelo
que a equação (2 - 23), referente ao potencial de um ponto exterior ao corpo, reduz-se neste caso à
seguinte expressão:
∫
(2 - 24)
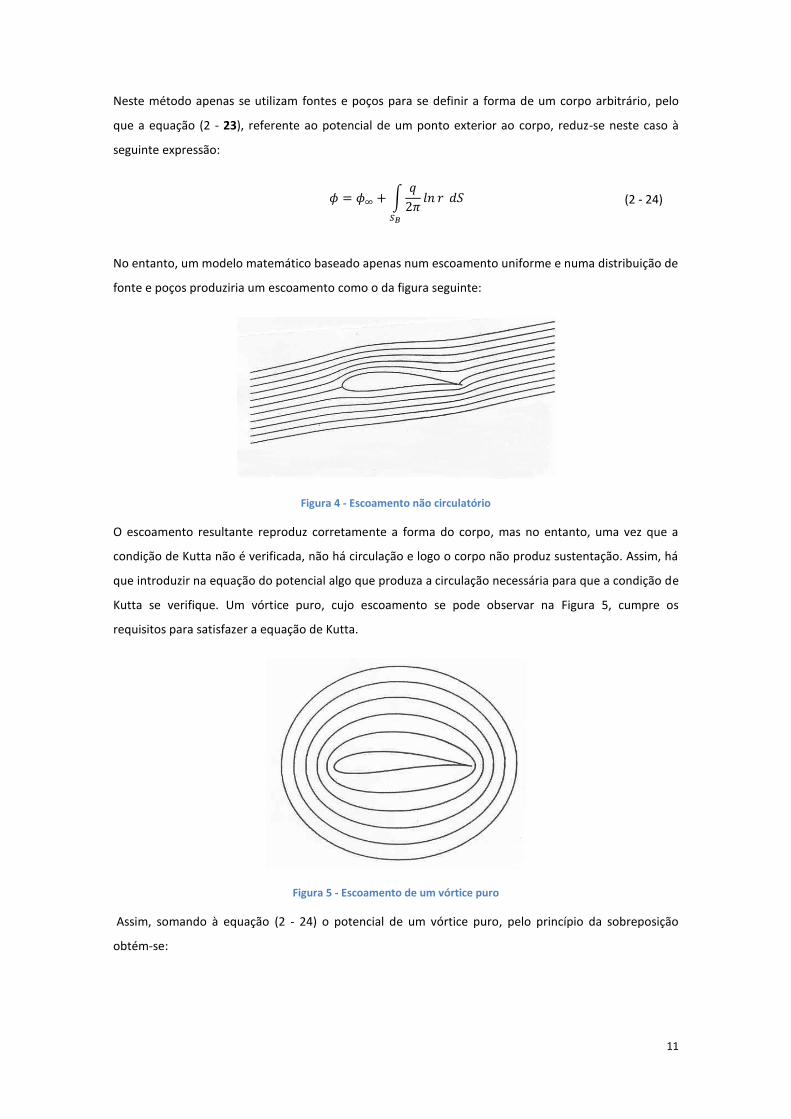
No entanto, um modelo matemático baseado apenas num escoamento uniforme e numa distribuição de
fonte e poços produziria um escoamento como o da figura seguinte:
Figura 4 - Escoamento não circulatório
O escoamento resultante reproduz corretamente a forma do corpo, mas no entanto, uma vez que a
condição de Kutta não é verificada, não há circulação e logo o corpo não produz sustentação. Assim, há
que introduzir na equação do potencial algo que produza a circulação necessária para que a condição de
Kutta se verifique. Um vórtice puro, cujo escoamento se pode observar na Figura 5, cumpre os
requisitos para satisfazer a equação de Kutta.
Figura 5 - Escoamento de um vórtice puro
Assim, somando à equação (2 - 24) o potencial de um vórtice puro, pelo princípio da sobreposição
obtém-se:
12
(2 - 25)
∫
∫
(2 - 26)
⏟
∫
[
( )
⏟
⏟
]
(2 - 27)
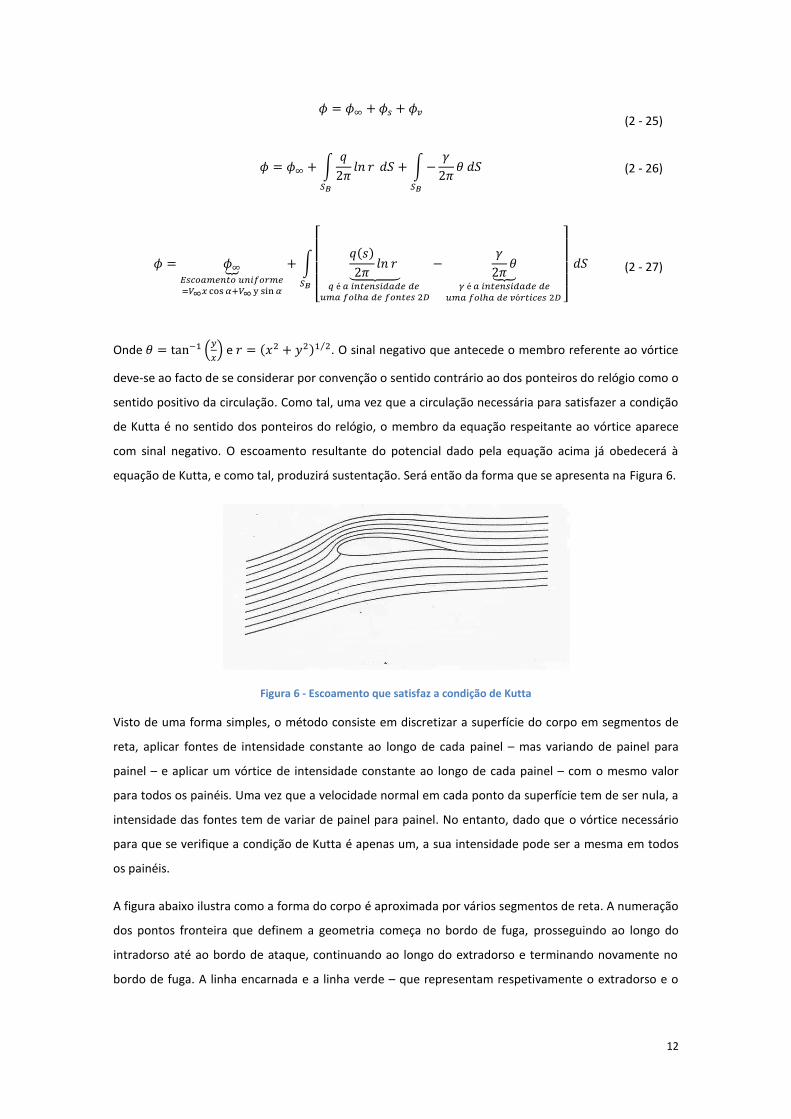
Onde (
) e ( ) ⁄ . O sinal negativo que antecede o membro referente ao vórtice
deve-se ao facto de se considerar por convenção o sentido contrário ao dos ponteiros do relógio como o
sentido positivo da circulação. Como tal, uma vez que a circulação necessária para satisfazer a condição
de Kutta é no sentido dos ponteiros do relógio, o membro da equação respeitante ao vórtice aparece
com sinal negativo. O escoamento resultante do potencial dado pela equação acima já obedecerá à
equação de Kutta, e como tal, produzirá sustentação. Será então da forma que se apresenta na Figura 6.
Figura 6 - Escoamento que satisfaz a condição de Kutta
Visto de uma forma simples, o método consiste em discretizar a superfície do corpo em segmentos de
reta, aplicar fontes de intensidade constante ao longo de cada painel – mas variando de painel para
painel – e aplicar um vórtice de intensidade constante ao longo de cada painel – com o mesmo valor
para todos os painéis. Uma vez que a velocidade normal em cada ponto da superfície tem de ser nula, a
intensidade das fontes tem de variar de painel para painel. No entanto, dado que o vórtice necessário
para que se verifique a condição de Kutta é apenas um, a sua intensidade pode ser a mesma em todos
os painéis.
A figura abaixo ilustra como a forma do corpo é aproximada por vários segmentos de reta. A numeração
dos pontos fronteira que definem a geometria começa no bordo de fuga, prosseguindo ao longo do
intradorso até ao bordo de ataque, continuando ao longo do extradorso e terminando novamente no
bordo de fuga. A linha encarnada e a linha verde – que representam respetivamente o extradorso e o
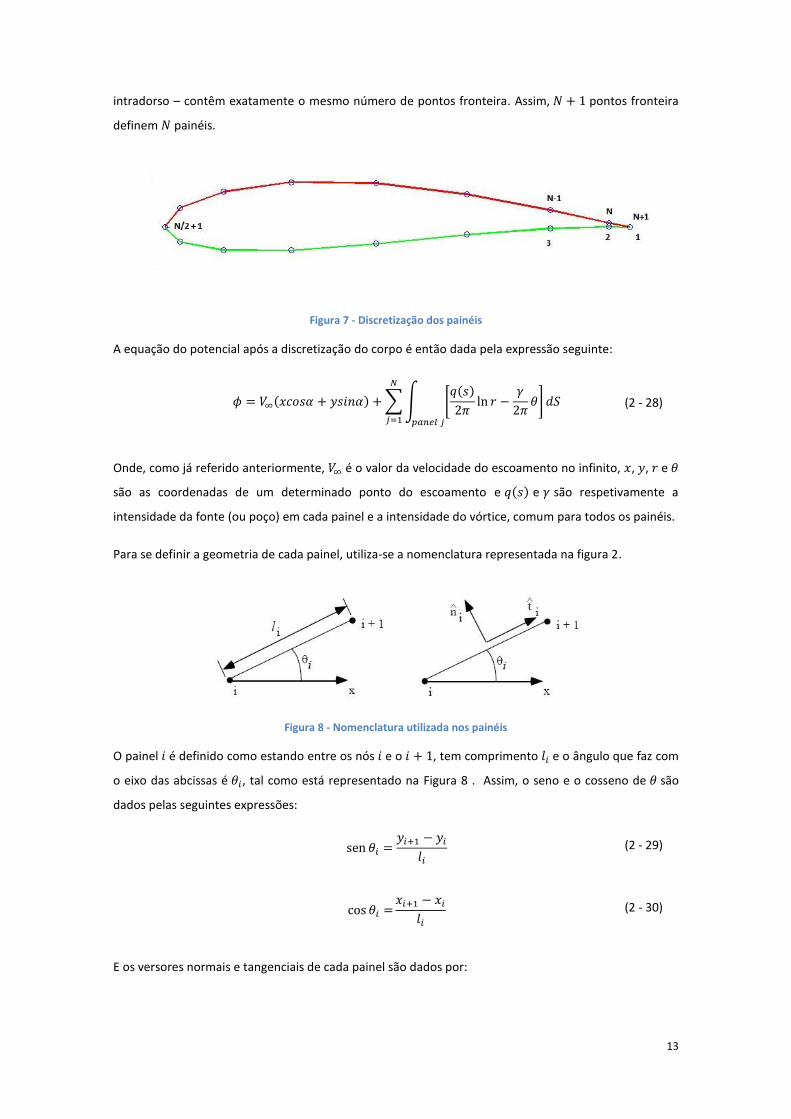
13
intradorso – contêm exatamente o mesmo número de pontos fronteira. Assim, pontos fronteira
definem painéis.
Figura 7 - Discretização dos painéis
A equação do potencial após a discretização do corpo é então dada pela expressão seguinte:
( ) ∑∫ [
( )
]
(2 - 28)
Onde, como já referido anteriormente, é o valor da velocidade do escoamento no infinito, , , e
são as coordenadas de um determinado ponto do escoamento e ( ) e são respetivamente a
intensidade da fonte (ou poço) em cada painel e a intensidade do vórtice, comum para todos os painéis.
Para se definir a geometria de cada painel, utiliza-se a nomenclatura representada na figura 2.
Figura 8 - Nomenclatura utilizada nos painéis
O painel é definido como estando entre os nós e o , tem comprimento e o ângulo que faz com
o eixo das abcissas é , tal como está representado na Figura 8 . Assim, o seno e o cosseno de são
dados pelas seguintes expressões:
(2 - 29)
(2 - 30)
E os versores normais e tangenciais de cada painel são dados por:
14
(2 - 31)
(2 - 32)
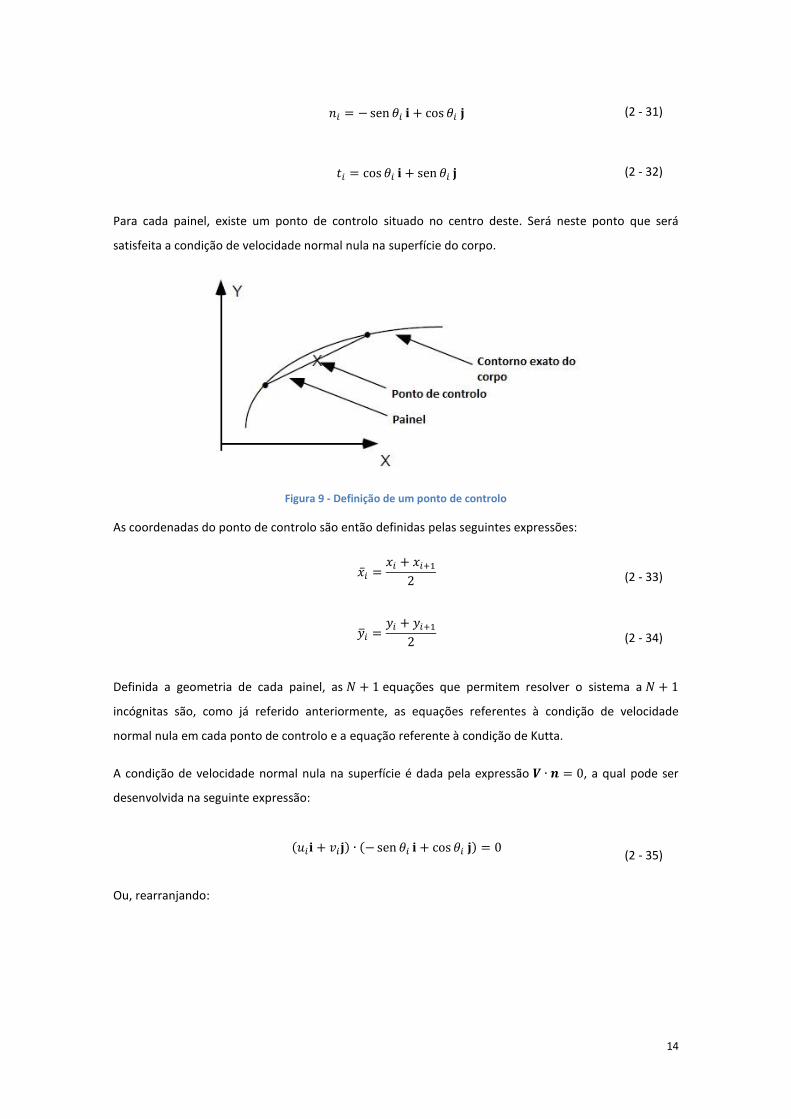
Para cada painel, existe um ponto de controlo situado no centro deste. Será neste ponto que será
satisfeita a condição de velocidade normal nula na superfície do corpo.
Figura 9 - Definição de um ponto de controlo
As coordenadas do ponto de controlo são então definidas pelas seguintes expressões:
(2 - 33)
(2 - 34)
Definida a geometria de cada painel, as equações que permitem resolver o sistema a
incógnitas são, como já referido anteriormente, as equações referentes à condição de velocidade
normal nula em cada ponto de controlo e a equação referente à condição de Kutta.
A condição de velocidade normal nula na superfície é dada pela expressão , a qual pode ser
desenvolvida na seguinte expressão:
( ) ( )
(2 - 35)
Ou, rearranjando:
15
(2 - 36)
Para cada . Embora neste caso apenas nos interesse que a velocidade normal num
determinado ponto de controlo seja nula, tal não é necessariamente obrigatório. É possível definir uma
velocidade de transpiração na parede [12], podendo-se desta forma por exemplo simular o efeito da
camada limite numa determinada superfície através do desvio das linha de corrente da superfície
originado por uma velocidade normal a apontar para o exterior da superfície.
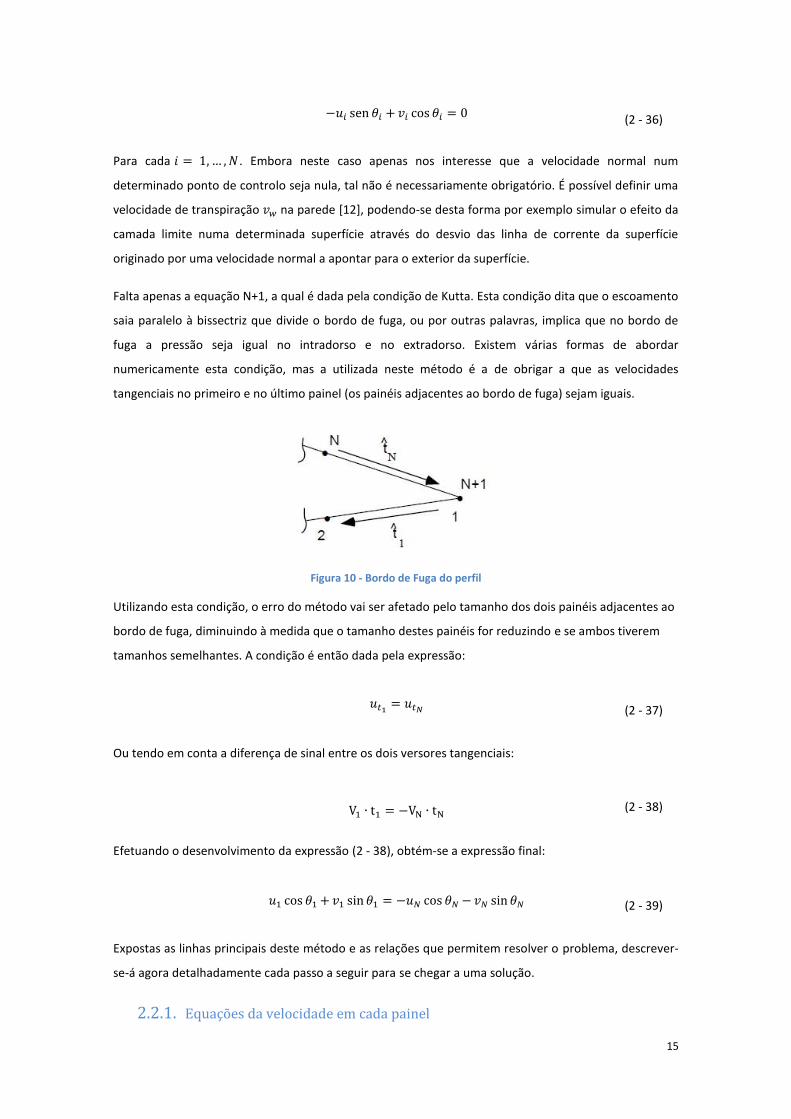
Falta apenas a equação N+1, a qual é dada pela condição de Kutta. Esta condição dita que o escoamento
saia paralelo à bissectriz que divide o bordo de fuga, ou por outras palavras, implica que no bordo de
fuga a pressão seja igual no intradorso e no extradorso. Existem várias formas de abordar
numericamente esta condição, mas a utilizada neste método é a de obrigar a que as velocidades
tangenciais no primeiro e no último painel (os painéis adjacentes ao bordo de fuga) sejam iguais.
Figura 10 - Bordo de Fuga do perfil
Utilizando esta condição, o erro do método vai ser afetado pelo tamanho dos dois painéis adjacentes ao
bordo de fuga, diminuindo à medida que o tamanho destes painéis for reduzindo e se ambos tiverem
tamanhos semelhantes. A condição é então dada pela expressão:
(2 - 37)
Ou tendo em conta a diferença de sinal entre os dois versores tangenciais:
(2 - 38)
Efetuando o desenvolvimento da expressão (2 - 38), obtém-se a expressão final:
(2 - 39)
Expostas as linhas principais deste método e as relações que permitem resolver o problema, descrever-
se-á agora detalhadamente cada passo a seguir para se chegar a uma solução.
2.2.1. Equações da velocidade em cada painel

16
As componentes da velocidade em cada painel i são dadas pela soma das contribuições do escoamento
não perturbado e das velocidades induzidas pela distribuição de fontes e de vórtices em cada painel.
Assim:
∑ ∑
(2 - 40)
∑ ∑
(2 - 41)
Onde , , e são os coeficientes de influência. Como exemplo, o coeficiente de influência
é a componente x da velocidade induzida em devido a uma fonte unitária sobre o painel j.
2.2.2. Cálculo dos coeficientes de influência
Para se determinar os coeficientes de influência , , e , utiliza-se o sistema de
coordenadas local e , que está ligado ao sistema de coordenadas global e através do angulo
, tal como ilustrado na figura abaixo.
Figura 11 - Sistema de coordenadas local e global
Deste modo, a integração da distribuição das fontes e dos vórtices ao longo do painel fica uma tarefa
fácil, procedendo-se à passagem para o sistema de coordenadas global através de uma transformação
de coordenadas simples. As expressões que executam a rotação de eixos são as seguintes:

17
(2 - 42)
(2 - 43)
Estabelecido o sistema de eixos, o próximo passo é descobrir as velocidades induzidas pelas
singularidades. No caso da fonte, a velocidade induzida por uma fonte nas suas coordenadas cilíndricas
naturais é:
(2 - 44)
Passando a expressão acima para coordenadas cartesianas, tem-se que:
( )
( )
(2 - 45)
(2 - 46)
Onde a origem da fonte é em e .
Colocando as fontes ao longo da coordenada de cada painel num ponto e integrando num
comprimento , as velocidades induzidas pelas distribuições de fontes são obtidas pelas expressões:
∫ ( )
( )
(2 - 47)
∫ ( )
( )
(2 - 48)
Para se obter os coeficientes de influência, escrevem-se as equações acima no referencial e com
( ) .
∫
( )
(2 - 49)
∫
( )
(2 - 50)
Resolvendo os integrais das expressões acima com recurso a tabelas, obtém-se o seguinte resultado:
18
[(
) ]
|
(2 - 51)
(
)|
(2 - 52)
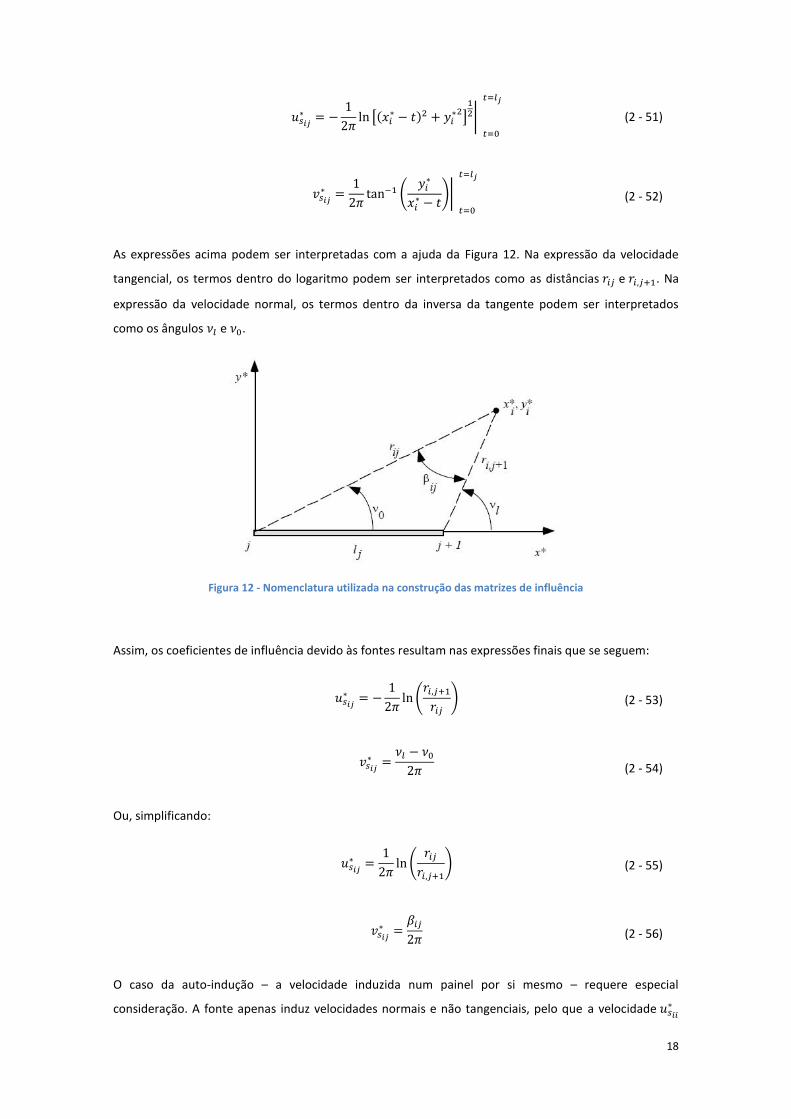
As expressões acima podem ser interpretadas com a ajuda da Figura 12. Na expressão da velocidade
tangencial, os termos dentro do logaritmo podem ser interpretados como as distâncias e . Na
expressão da velocidade normal, os termos dentro da inversa da tangente podem ser interpretados
como os ângulos e .
Figura 12 - Nomenclatura utilizada na construção das matrizes de influência
Assim, os coeficientes de influência devido às fontes resultam nas expressões finais que se seguem:
(
)
(2 - 53)
(2 - 54)
Ou, simplificando:
(
)
(2 - 55)
(2 - 56)
O caso da auto-indução – a velocidade induzida num painel por si mesmo – requere especial
consideração. A fonte apenas induz velocidades normais e não tangenciais, pelo que a velocidade

19
será nula e depende do lado pelo qual se faz a aproximação. Neste caso, trata-se de uma
aproximação pelo lado exterior, pelo que então será igual a , e logo:
Considerando agora a influência dos vórtices, as expressões para as velocidades induzidas são
semelhantes ao caso das fontes devido à semelhança das expressões gerais da velocidade em
coordenadas cilíndricas.
(2 - 57)
Tal como no caso da fonte, passando a expressão (2 - 57) para coordenadas cartesianas, obtêm-se as
seguintes expressões:
( )
( )
(2 - 58)
(2 - 59)
Onde a origem do vórtice é em e e é a intensidade do vórtice.
Realizando o mesmo exercício feito para as fontes, também é possível chegar às expressões para os
coeficientes de influência devido a um vórtice. Integrando num comprimento no referencial do painel
e substituindo ( ) , obtêm-se as seguintes expressões para os coeficientes de influência devido a
um vórtice no referencial e :
∫
( )
(2 - 60)
∫
( )
(2 - 61)
Resolvendo as equações (notando que os integrais são os mesmos que se tinham para o caso das fontes,
embora trocados), obtêm-se as expressões finais dos coeficientes de influência devido a um vórtice.

20
(2 - 62)
(
)
(2 - 63)
Onde a nomenclatura é a mesma utilizada no caso das fontes, patente na Figura 12. No caso da auto-
indução, como agora neste caso o vórtice apenas induz velocidade tangencial, será nula, e, tal como
no caso das fontes e uma vez que a aproximação é feita pelo lado exterior, e logo:
2.2.3. Equações de velocidade normal nula na superfície do corpo
Para se encontrarem os valores das intensidades das singularidades, é necessário primeiro obter uma
matriz de dimensão ( ) que contenha os coeficientes de influência das fontes e vórtices e
uma matriz que contenha as componentes respeitantes ao escoamento uniforme. Assim, com base
nas equações da velocidade normal nula (eq. (2 - 36)), o objetivo nesta primeira parte é o de se obter
um sistema de equações da forma:
∑
(2 - 64)
Assim, recordando a equação (2 - 36):
(2 - 36)
Onde as velocidades são dadas por:
∑ ∑
(2 - 65)
∑ ∑
(2 - 66)
Substituindo as equações (2 - 65) e (2 - 66) na equação (2 - 36), fica-se com:
21
( ∑ ∑
)
( ∑ ∑
)
(2 - 67)
Reagrupando, a expressão (2 - 67) dá origem à expressão:
( )⏟
∑( )
⏟
( ∑
∑
)
⏟
(2 - 68)
A expressão (2 - 68) pode ser aplicada para todos os pontos de controlo.
2.2.4. Equação da condição de Kutta
A equação necessária para completar o sistema a ser resolvido vem da expressão da condição de
Kutta, tal como já referido anteriormente. Esta equação dita que a velocidade – e consequentemente a
pressão – no bordo de fuga seja igual no intradorso e no extradorso. Como tal, é necessário garantir que
a velocidade tangencial nos pontos de controlo dos painéis adjacentes ao bordo de fuga é igual.
Recordando a expressão (2 - 39):
(2 - 69)
O sinal negativo no lado direito da equação advém do facto de o sentido positivo da direção tangencial
ser no sentido dos ponteiros do relógio, e como tal, em sentido contrário nos dois painéis referidos.
Com base na equação (2 - 39), o objetivo neste caso é o de se obter a linha da matriz , que
será da forma:
∑
(2 - 70)
As expressões para as velocidades nos painéis adjacentes ao bordo de fuga são:
22
∑ ∑
(2 - 71)
∑ ∑
(2 - 72)
∑ ∑
(2 - 73)
∑ ∑
(2 - 74)
As quais, substituindo na equação (2 - 39), fica-se com:
( ∑ ∑
)
( ∑ ∑
)
( ∑ ∑
)
( ∑ ∑
)
(2 - 75)
O desenvolvimento e reagrupamento da equação (2 - 75) origina:
23
∑( )⏟
[∑( )
]
⏟
( )⏟
(2 - 76)
Os coeficientes de influência , , e , , são calculados no referencial
local do painel j e transformados para o sistema de eixos global através das expressões (2 - 42) e (2 - 43):
2.2.5. Resolução do sistema de equações para as incógnitas e .
Expostas as equações necessárias e juntando as equações (2 - 64) e (2 - 70), neste momento é
possível resolver o sistema de equações global para se encontrarem os valores das singularidades em
cada painel.
O sistema final é o seguinte:
[ ]
[ ]
[ ]
(2 - 77)
O qual é facilmente resolvido pelo método de eliminação de Gauss-Jordan [15] com recurso a uma
rotina do MATLAB.
2.2.6. Cálculo das velocidades tangenciais em cada ponto de controlo
Calculados os valores das singularidades, é agora possível saber-se a velocidade tangencial ao longo da
superfície do corpo. Desenvolvendo a expressão da equação da velocidade tangencial para cada ponto
de controlo, tem-se:
( ∑ ∑
)
( ∑ ∑
)
(2 - 78)
Onde , , , são novamente os coeficientes de influência calculados anteriormente.

24
Tal como para o caso das velocidades normais em que se introduziu a matriz , a expressão acima
também pode ser simplificada introduzindo a matriz . Assim, analogamente à matriz , a matriz
irá conter as componentes tangenciais dos coeficientes de influência induzidos pelas fontes e pelos
vórtices em cada painel. A equação para o cálculo das velocidades tangenciais poderá então ser
simplificada para:
( ) ∑( )
⏟
( ∑
∑
)
⏟
( )
(2 - 79)
2.2.7. Cálculo dos coeficientes de pressão em cada ponto de controlo.
Sabendo a velocidade tangencial em cada ponto de controlo, é possível agora calcular o coeficiente de
pressão ao longo da superfície do perfil através da definição de e da equação de Bernoulli, dadas
respectivamente pelas seguintes expressões:
(2 - 80)
(2 - 81)
Onde é a velocidade tangencial calculada por (2 - 79) num determinado ponto do escoamento.
Através de uma manipulação algébrica simples é possível chegar à forma mais conveniente para a
expressão de de modo a se poder calcular a pressão em qualquer ponto sabendo apenas a
velocidade local. Assim, a expressão final para o coeficiente de pressão é dada por:
( )
(2 - 82)
Com a expressão (2 - 82) é assim possível calcular o em cada ponto de controlo do perfil.
2.2.8. Cálculo dos coeficientes adimensionais
O coeficiente de sustentação pode ser calculado através de duas formas. A primeira é através da
equação de Kutta-Joukowski [16]. Para tal é necessário primeiro calcular a circulação total através da
expressão:

25
∫
∑
(2 - 83)
Onde é a intensidade do vórtice constante em todos os painéis vindo da solução do sistema de
equações e é o comprimento do respetivo painel i. Sabendo a circulação total, pela equação de
Kutta tem-se que:
(2 - 84)
Onde é a velocidade do escoamento não perturbado e é a corda do perfil.
Também é possível calcular o coeficiente de sustentação através da integração da pressão ao longo do
perfil, assim como também é possível calcular o coeficiente de resistência e o coeficiente momento em
torno do centro do perfil.
Figura 13 - Forças actuantes no perfil em função do ângulo de ataque
O coeficiente de sustentação e o coeficiente de resistência são dados respectivamente pelas seguintes
expressões:
(2 - 85)
(2 - 86)
Onde e são dados pela regra de integração do ponto médio [17]:

26
∮ (
) ∑ (
)
(2 - 87)
∮ (
) ∑ (
)
(2 - 88)
Também é possível calcular o coeficiente de momento em torno do centro do perfil através da
expressão:
(2 - 89)
Onde e são dados pelas integrações da pressão multiplicadas pelo braço em relação ao centro
do perfil:
∑ (
)
(2 - 90)
∑ (
)
( )
(2 - 91)
Para um perfil em fluido perfeito, o coeficiente de resistência ( ) deverá aproximar-se o mais possível
de zero, uma vez que não existem forças viscossas. Será um um parâmetro útil na verificação do código
uma vez que quanto mais se aproximar de zero, maior será a precisão numérica.
2.3. Introdução da circulação no ASA 2D
No programa ASA 2D a circulação é introduzida de forma diferente daquela descrita pelo método de
Hess & Smith original. Embora o método original seja numericamente simples, os resultados da
distribuição de pressão não são satisfatórios para bordos de fuga muito pronunciados, tal como
demonstrado por Hess, J. [18]. Na Figura 14 e Figura 15 utilizou-se um perfil de Joukowski com
espessura de 15% e flecha relativa de 5% a um ângulo de ataque de 2 para demonstrar este efeito.
27
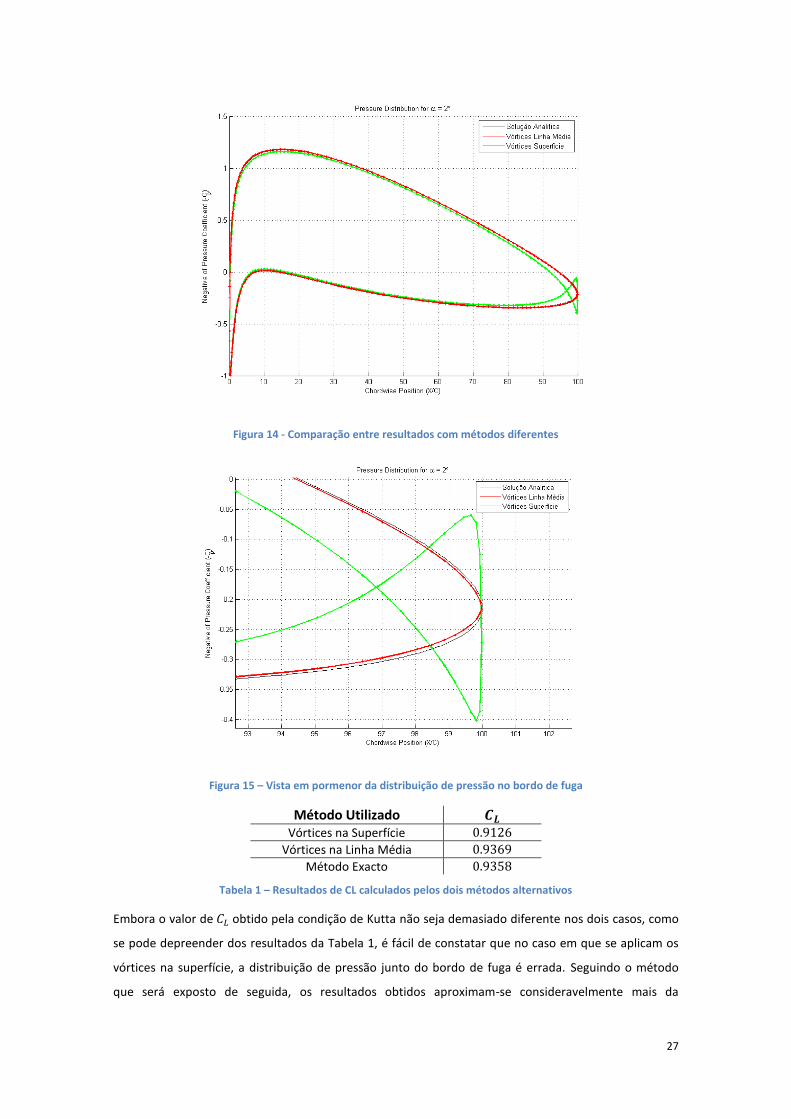
Figura 14 - Comparação entre resultados com métodos diferentes
Figura 15 – Vista em pormenor da distribuição de pressão no bordo de fuga
Método Utilizado
Vórtices na Superfície
Vórtices na Linha Média
Método Exacto
Tabela 1 – Resultados de CL calculados pelos dois métodos alternativos
Embora o valor de obtido pela condição de Kutta não seja demasiado diferente nos dois casos, como
se pode depreender dos resultados da Tabela 1, é fácil de constatar que no caso em que se aplicam os
vórtices na superfície, a distribuição de pressão junto do bordo de fuga é errada. Seguindo o método
que será exposto de seguida, os resultados obtidos aproximam-se consideravelmente mais da
28
distribuição de pressão exata para o perfil de Joukowski definido acima, a qual é dada pela
transformação conforme.
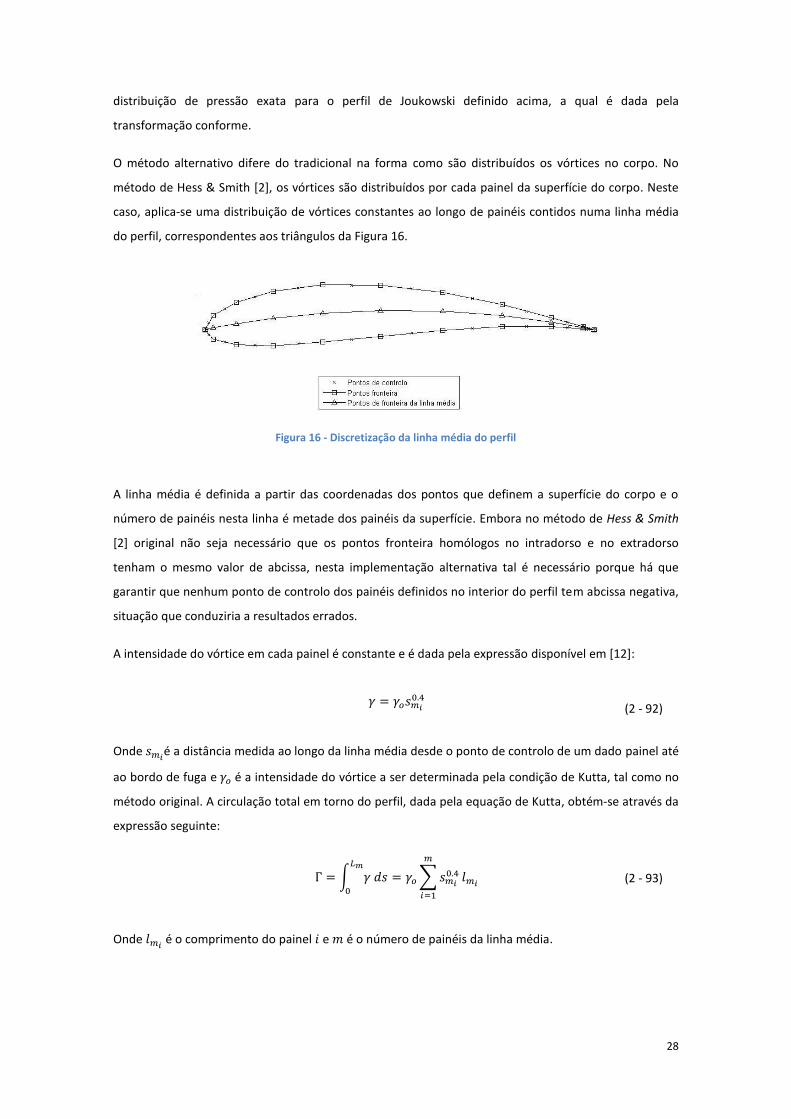
O método alternativo difere do tradicional na forma como são distribuídos os vórtices no corpo. No
método de Hess & Smith [2], os vórtices são distribuídos por cada painel da superfície do corpo. Neste
caso, aplica-se uma distribuição de vórtices constantes ao longo de painéis contidos numa linha média
do perfil, correspondentes aos triângulos da Figura 16.
Figura 16 - Discretização da linha média do perfil
A linha média é definida a partir das coordenadas dos pontos que definem a superfície do corpo e o
número de painéis nesta linha é metade dos painéis da superfície. Embora no método de Hess & Smith
[2] original não seja necessário que os pontos fronteira homólogos no intradorso e no extradorso
tenham o mesmo valor de abcissa, nesta implementação alternativa tal é necessário porque há que
garantir que nenhum ponto de controlo dos painéis definidos no interior do perfil tem abcissa negativa,
situação que conduziria a resultados errados.
A intensidade do vórtice em cada painel é constante e é dada pela expressão disponível em [12]:
(2 - 92)
Onde é a distância medida ao longo da linha média desde o ponto de controlo de um dado painel até
ao bordo de fuga e é a intensidade do vórtice a ser determinada pela condição de Kutta, tal como no
método original. A circulação total em torno do perfil, dada pela equação de Kutta, obtém-se através da
expressão seguinte:
∫
∑
(2 - 93)
Onde é o comprimento do painel e é o número de painéis da linha média.
29
2.4. Extensão do método para múltiplos componentes
Na descrição do método de Hess & Smith chegou-se ao sistema de equações final para calcular as
singularidades que definem o escoamento em torno de um perfil (2 - 77), o qual, recordando, era da
forma:
[ ]
[ ]
[ ]
(2 - 77)
Tinha-se então um sistema com equações para incógnitas, onde é o número de painéis
do perfil. Estas equações são as equações correspondentes à condição de fronteira que dita que a
componente normal da velocidade seja nula na superfície do corpo e mais uma equação
correspondente à condição de Kutta. Assim, para se estender este método dos painéis para um número
de corpos arbitrário serão necessárias ( ) equações, onde é o número de componentes
definido e é o número de painéis de cada perfil . Estas equações correspondem igualmente às
condições de fronteira descritas anteriormente para cada perfil, mas agora terão de ser satisfeitas para
todos os perfis. O sistema de equações geral será então da forma que se apresenta de seguida:
[
]
[
]
[
]
(2 - 94)
No sistema acima, cada posição na matriz corresponde a uma matriz , tal como se tinha no caso
para apenas um perfil. As posições da diagonal principal correspondem aos coeficientes de influência
dos painéis de um perfil sobre si mesmo. As restantes posições correspondem aos coeficientes de
influência de um determinado perfil sobre os restantes outros perfis. Assim, por exemplo, e por ordem,
a primeira linha da matriz contém a matriz de influência do primeiro perfil sobre si mesmo, a matriz
de influência do segundo perfil sobre o primeiro perfil, a matriz de influência do terceiro perfil sobre o
primeiro perfil, etc. até se chegar ao último perfil , seguindo-se a mesma lógica para as restantes linhas
da matriz.
Por sua vez, o vetor contém por ordem as intensidades das fontes e dos vórtices associados aos
painéis de cada perfil, que no sistema não resolvido ainda são incógnitas. O vetor (o qual não deve
ser confundido com o vetor definido anteriormente) corresponde à junção dos vetores individuais
de cada perfil, tal como se havia definido antes na equação (2 - 77).
30
O sistema de equações estendido para perfis é assim em grande medida semelhante ao sistema de
equações para o cálculo de apenas um perfil. Cada posição das matrizes do sistema é calculada
individualmente exatamente pelo mesmo método que seria calculada para apenas um perfil, tornando o
cálculo sistemático.
2.4.1. Cálculo das velocidades tangenciais e do coeficiente de pressão
Para o cálculo das velocidades tangenciais em cada painel, agora é necessário contar com todas as
contribuições de todas as distribuições de singularidades nos perfis. Tal como a matriz se
transformou na matriz, a matriz será agora a junção de várias sub-matrizes, agrupadas na matriz
:
[
]
(2 - 95)
Uma vez mais, as posições da diagonal principal serão os coeficientes de influência na direcção
tangencial de um determinado perfil sobre si mesmo. As restantes posições serão as componentes
tangenciais dos coeficientes de influência de um determinado perfil sobre outro, consoante a posição na
matriz. A posição será por exemplo a matriz das componentes tangenciais do perfil número 2 sobre
o perfil número 1.
Multiplicando a matriz pelo vector das singularidades , obtém-se um vetor – aqui designado por
– que conterá para cada painel a soma de todas as contribuições dos outros restantes painéis.
[
]
[
]
(2 - 96)
A velocidade tangencial em cada painel para cada perfil será então a soma da resultante do escoamento
de aproximação com a respectiva posição no vector :
( )
(2 - 97)
Finalmente, o cálculo do coeficiente de pressão é feito utilizando a mesma equação que é utilizada para
o caso de se ter apenas um perfil, dada por:
31
( )
(2 - 82)
2.4.2. Cálculo dos coeficientes adimensionais
Tal como no caso em que se tinha apenas um perfil, através da condição de Kutta é possível calcular o
coeficiente de sustentação através da circulação. No entanto, uma vez que a equação de Kutta-
Joukowski [16] apenas é válida para a circulação total do sistema, quando se tem mais de um corpo não
é possível calcular os coeficientes de sustentação individuais de cada perfil. Assim, a circulação de cada
perfil é novamente calculada através da seguinte expressão:
∫
∑
(2 - 98)
Onde é a intensidade do vórtice calculado para o perfil e é o comprimento de cada painel do
respetivo perfil. A circulação total será dada por:
∑
(2 - 99)
Sabendo a circulação total, pela equação de Kutta-Jowkowski [16] tem-se que:
(2 - 100)
Onde é a velocidade do escoamento não perturbado. Por uma questão de uniformização dos
resultados, escolheu-se definir os coeficientes de sustentação de todos os perfis em função da corda do
perfil principal, o qual, como se verá adiante, será por regra o primeiro perfil a ser definido. Assim,
corresponde à corda do perfil principal.
Da integração da pressão ao longo da superfície de cada perfil, é possível também calcular os
coeficientes de sustentação, de resistência e de momento em torno do perfil através das mesmas
equações utilizadas para o caso em que se tinha apenas um perfil (equações (2 - 81), (2 - 82) e (2 - 84)),
com a ressalva de agora a corda utilizada para a adimensionalização ser a do perfil principal.

32
33
3. Organização do Método de Cálculo
A parte inicial deste trabalho consistiu na passagem do programa ASA 2D, desenvolvido em linguagem
FORTRAN, para o ambiente MATLAB. A principal razão para esta escolha deveu-se ao facto de o
software Matlab permitir uma melhor manipulação dos resultados, possibilitando a criação de gráficos e
figuras que facilitam a posterior análise de resultados.
Optou-se por desenvolver o programa em três blocos, um bloco pré-processador onde se podem definir
as geometrias dos perfis e a sua orientação relativa, um processador onde se efetua o cálculo pelo
método dos painéis propriamente dito e um pós-processador onde se podem visualizar os gráficos dos
resultados e onde se podem gerar ficheiros de saída.
3.1. Pré-processador
No pré-processador é possível escolher entre quatro opções para se gerar a geometria dos perfis. Essas
opções são:
- Malha de pontos gerados externamente.
- Geração de um perfil NACA da série de 4 dígitos.
- Geração de um perfil de Kármán-Trefftz.
- Geração de um perfil de Joukowski.
Apresenta-se de seguida uma descrição detalhada de cada opção de construção dos perfis.
3.1.1. Malha de pontos gerados externamente
Nesta opção é possível introduzir-se o nome de um ficheiro no qual estão contidas as coordenadas dos
pontos de definem um perfil. Também fica a possibilidade de se introduzir uma rotina que interpole os
pontos e que gere um perfil consoante o número de painéis que se queira.
3.1.2. Geração de um perfil NACA da série de 4 dígitos
Os perfis NACA da série de 4 dígitos são construídos com base em equações analíticas [16], sendo
necessários três parâmetros para definir um determinado perfil: a espessura, a flecha máxima e a
abcissa relativa onde esta ocorre. O sistema de numeração dos perfis NACA segue uma lógica que tem
por base estes parâmetros. A nomenclatura é definida como:

34
Onde:
F é a flecha máxima no perfil, em percentagem da corda.
M é a abcissa em percentagem da corda onde ocorre a flecha máxima
TT é a espessura máxima em percentagem da corda.
As equações que definem o intradorso e o extradorso do perfil são dadas por:
( )
( ) ( )
(3 - 1)
e
( )
( ) ( )
(3 - 2)
Onde ( ) e ( ) representam respetivamente a distribuição de espessura e a distribuição de
curvatura, definidas mais adiante, e onde , o declive da função de curvatura, é dado por:
( )
(3 - 3)
Embora estas funções possam ser contínuas, de modo a que estes perfis possam ser aplicados no
método dos painéis há que criar uma distribuição discreta de pontos. Como tal, utilizou-se a chamada
função de espaçamento do cosseno. A sua expressão é dada por:
[ {
( )
( )}]
(3 - 4)
Onde é o número de painéis pretendido. Esta função tem como objetivo o de criar mais pontos – e
consequentemente mais painéis – junto do bordo de ataque e do bordo de fuga. A necessidade de haver
mais painéis junto do bordo de ataque tem a ver com o facto de nesta zona haver uma rápida variação
da geometria, enquanto que no bordo de fuga a precisão numérica melhora quanto mais pequenos
forem os painéis.
A função de distribuição de espessura e distribuição de curvatura do perfil, assim como as respetivas
derivadas, são dadas respetivamente pelas expressões:
35
( ) [ √ ]
(3 - 5)
( )
[ ]
( )
( ) [ ]
(3 - 6)
( )
[ ]
( )
( ) [ ]
(3 - 7)
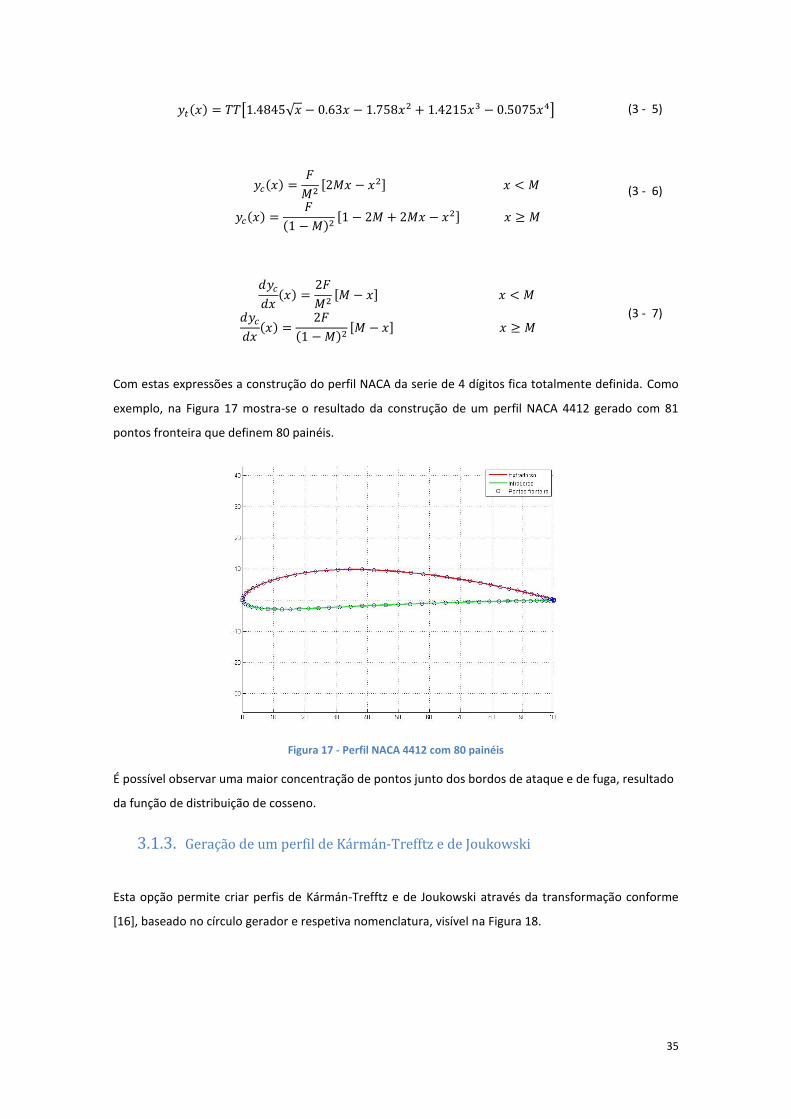
Com estas expressões a construção do perfil NACA da serie de 4 dígitos fica totalmente definida. Como
exemplo, na Figura 17 mostra-se o resultado da construção de um perfil NACA 4412 gerado com 81
pontos fronteira que definem 80 painéis.
Figura 17 - Perfil NACA 4412 com 80 painéis
É possível observar uma maior concentração de pontos junto dos bordos de ataque e de fuga, resultado
da função de distribuição de cosseno.
3.1.3. Geração de um perfil de Kármán-Trefftz e de Joukowski
Esta opção permite criar perfis de Kármán-Trefftz e de Joukowski através da transformação conforme
[16], baseado no círculo gerador e respetiva nomenclatura, visível na Figura 18.

36
Figura 18 - Círculo gerador da transformação conforme
Introduzindo as coordenadas do centro do círculo gerador no sistema de eixos e , através da
transformação Kármán-Trefftz e de Joukowski é possível criar perfis no plano transformado. A
transformação de Kármán-Trefftz é dada pela seguinte expressão:
( ) ( )
( ) ( )
(3 - 8)
Onde são as coordenadas complexas de um determinado ponto no plano do círculo gerador, é a
abcissa em que o círculo corta o eixo positivo das abcissas e é um valor que varia entre 2 e 1 e está
relacionado com o ângulo do bordo de fuga do perfil , sendo dado pela seguinte expressão:
(3 - 9)
A transformação de Joukowski é um caso particular da transformação de Kármán-Trefftz, e dá-se
quando , ou seja, quando o ângulo do bordo de fuga é nulo. Fica-se então numa situação em que a
expressão (3 - 8) se reduz a:
(3 - 10)
Mais uma vez, embora estas funções sejam contínuas, para estes perfis poderem ser aplicados ao
método dos painéis é necessário discretizá-las por pontos. Criando pontos no círculo gerador com
espaçamento igual, irão haver mais pontos junto do bordo de ataque e de fuga do perfil no plano
transformado, tal como está demonstrado nas Figura 19 e Figura 20.

37
Figura 19 - Círculo Gerador 61 pontos
Figura 20 - Perfil Plano transformado 61 pontos
Com um espaçamento igual dos pontos no círculo gerador, o perfil no plano transformado terá mais
pontos junto do bordo de ataque e de fuga, tal como pretendido devido às razões já anteriormente
expostas.
3.1.4. Sistema de eixos local e sistema de eixos global
Cada perfil tem associado a si um sistema de eixos local, tendo a origem no bordo de ataque e o eixo
das abcissas alinhado com a corda do perfil, tal como visível na Figura 21.
Figura 21 - Sistema de Eixos Global para Perfil Simples
No entanto, uma vez que o programa suporta cálculos com vários componentes, torna-se necessário
definir um sistema de eixos global e independente do sistema de eixos de cada perfil. Assim, é
necessário definir as coordenadas dos bordos de ataque e de fuga de cada perfil em relação a uma
origem arbitrária. Como cada perfil continua individualmente a ser definido em relação ao seu
38
referencial local, a partir deste momento há que proceder a uma rotação de eixos e a uma translação
consoante a respetiva posição de cada perfil no referencial global.
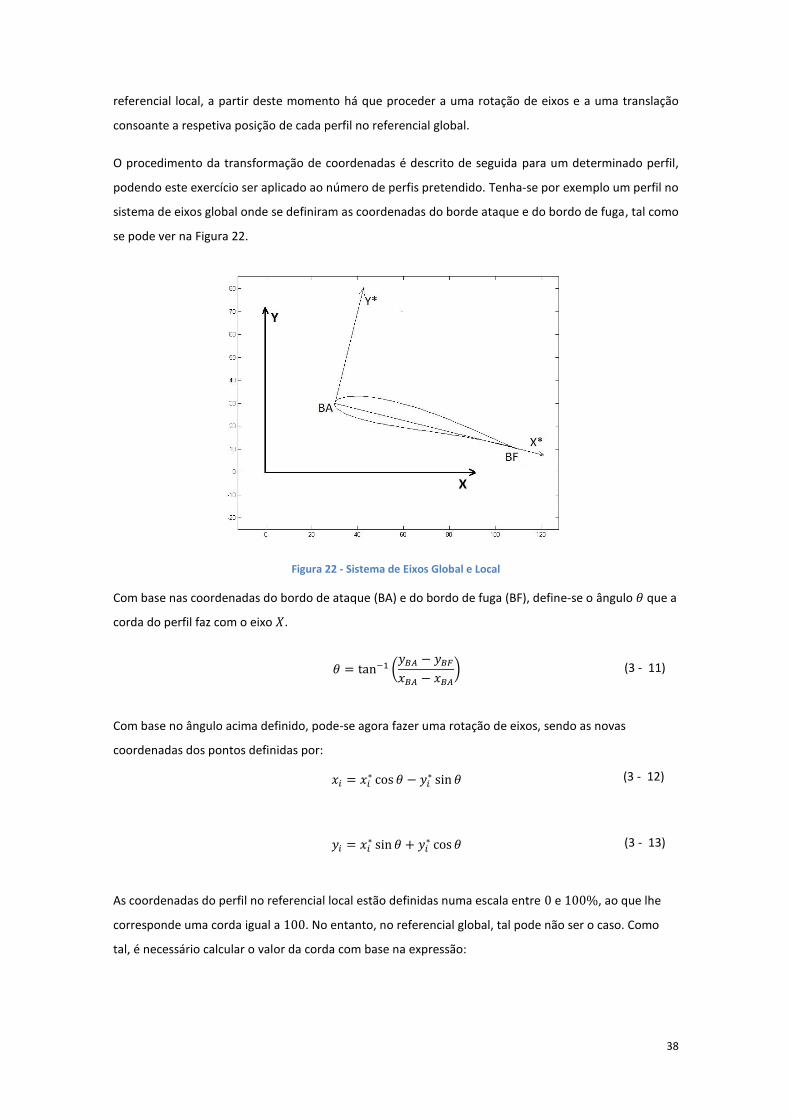
O procedimento da transformação de coordenadas é descrito de seguida para um determinado perfil,
podendo este exercício ser aplicado ao número de perfis pretendido. Tenha-se por exemplo um perfil no
sistema de eixos global onde se definiram as coordenadas do borde ataque e do bordo de fuga, tal como
se pode ver na Figura 22.
Figura 22 - Sistema de Eixos Global e Local
Com base nas coordenadas do bordo de ataque (BA) e do bordo de fuga (BF), define-se o ângulo que a
corda do perfil faz com o eixo .
(
)
(3 - 11)
Com base no ângulo acima definido, pode-se agora fazer uma rotação de eixos, sendo as novas
coordenadas dos pontos definidas por:
(3 - 12)
(3 - 13)
As coordenadas do perfil no referencial local estão definidas numa escala entre e , ao que lhe
corresponde uma corda igual a . No entanto, no referencial global, tal pode não ser o caso. Como
tal, é necessário calcular o valor da corda com base na expressão:
39
√( ) ( )
(3 - 14)
As coordenadas do perfil têm de ser adimensionalizadas pela nova corda com recurso à expressão:
(
)
(3 - 15)
(
)
(3 - 16)
Onde o valor corresponde ao valor da corda original do perfil definida em coordenadas locais. Por
fim, é necessário efetuar uma translação das coordenadas para posicionar o perfil na sua posição do
referencial global. Tal é conseguido com base nas expressões:
(3 - 17)
(3 - 18)
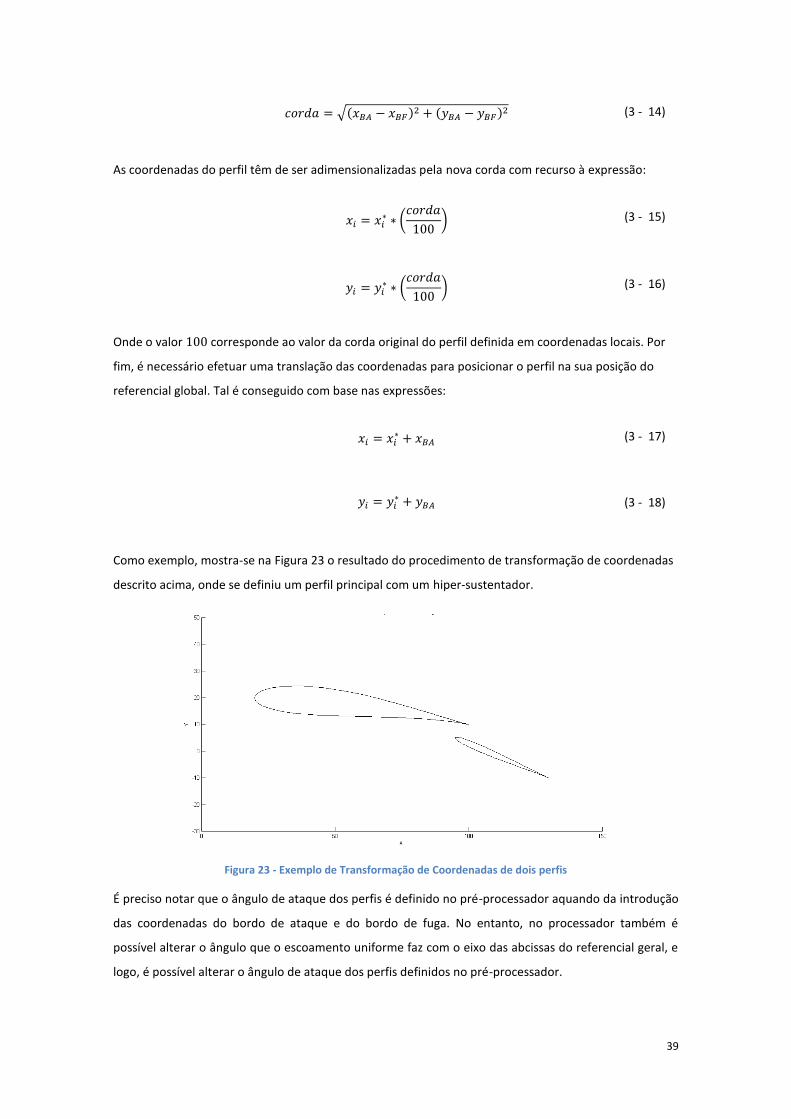
Como exemplo, mostra-se na Figura 23 o resultado do procedimento de transformação de coordenadas
descrito acima, onde se definiu um perfil principal com um hiper-sustentador.
Figura 23 - Exemplo de Transformação de Coordenadas de dois perfis
É preciso notar que o ângulo de ataque dos perfis é definido no pré-processador aquando da introdução
das coordenadas do bordo de ataque e do bordo de fuga. No entanto, no processador também é
possível alterar o ângulo que o escoamento uniforme faz com o eixo das abcissas do referencial geral, e
logo, é possível alterar o ângulo de ataque dos perfis definidos no pré-processador.
40
3.2. Processador
Definidas as geometrias dos perfis, é possível efetuar o cálculo propriamente dito através do método
dos painéis. Tal é concretizado no Processador. Primeiro, é necessário definir o ângulo que o
escoamento uniforme faz com a horizontal (que pode ser nulo se não se desejar alterar o ângulo de
ataque dos perfis já definidos), e de seguida existe a opção de efetuar o cálculo com ou sem efeito solo.
Uma vez que o cálculo difere substancialmente entre uma opção ou outra, de seguida descrever-se-á
cada uma destas opções.
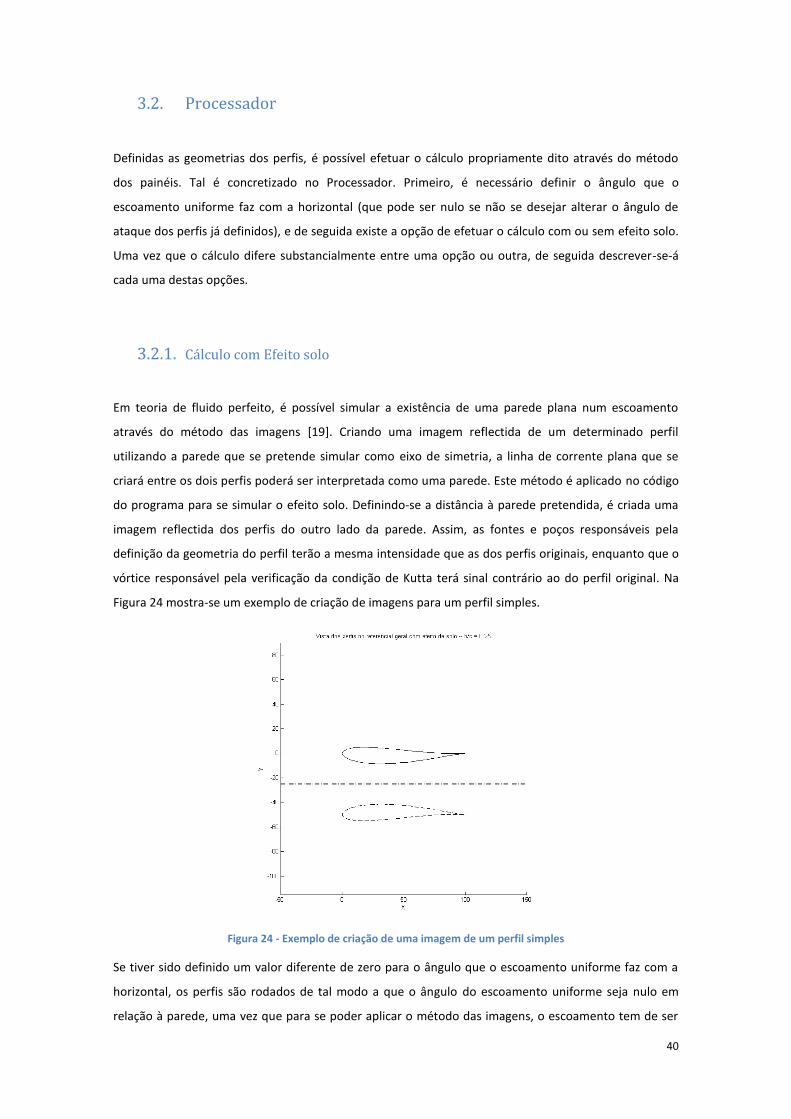
3.2.1. Cálculo com Efeito solo
Em teoria de fluido perfeito, é possível simular a existência de uma parede plana num escoamento
através do método das imagens [19]. Criando uma imagem reflectida de um determinado perfil
utilizando a parede que se pretende simular como eixo de simetria, a linha de corrente plana que se
criará entre os dois perfis poderá ser interpretada como uma parede. Este método é aplicado no código
do programa para se simular o efeito solo. Definindo-se a distância à parede pretendida, é criada uma
imagem reflectida dos perfis do outro lado da parede. Assim, as fontes e poços responsáveis pela
definição da geometria do perfil terão a mesma intensidade que as dos perfis originais, enquanto que o
vórtice responsável pela verificação da condição de Kutta terá sinal contrário ao do perfil original. Na
Figura 24 mostra-se um exemplo de criação de imagens para um perfil simples.
Figura 24 - Exemplo de criação de uma imagem de um perfil simples
Se tiver sido definido um valor diferente de zero para o ângulo que o escoamento uniforme faz com a
horizontal, os perfis são rodados de tal modo a que o ângulo do escoamento uniforme seja nulo em
relação à parede, uma vez que para se poder aplicar o método das imagens, o escoamento tem de ser
41
paralelo à parede. O ponto sobre o qual os perfis rodam é definido como estando sobre a parede e a
metade da corda do perfil principal. Este processo é exemplificado na Figura 25, onde se definiu um
ângulo com a horizontal de 10 :
Figura 25 - Exemplo de criação de uma imagem de um perfil simples com rotação
Após os procedimentos de criação de imagens e rotação de coordenadas, o cálculo prossegue aplicando
o método de cálculo exposto na secção 2.2.
3.2.2. Cálculo sem Efeito solo
Escolhendo efetuar o cálculo sem efeito solo, após definido o ângulo que o escoamento uniforme faz
com o eixo das abcissas, o programa aplica o método de cálculo em 2.2.
3.3. Pós-processador
Após terminado o cálculo no processador, é possível proceder à visualização dos resultados. De seguida
enumeram-se as possibilidades à disposição:
I. Visualização das linhas de corrente do escoamento.
II. Visualização da distribuição de velocidade em torno dos perfis.
III. Visualização da distribuição dos coeficientes de pressão em torno do perfis.
IV. Visualização dos vetores de velocidade do escoamento.
V. Visualização das distribuições de pressão de cada perfil.
VI. Escrita dos resultados obtidos num ficheiro.
O primeiro passo para se poder visualizar as quatro primeiras opções é o de calcular as velocidades
induzidas pelas singularidades dos perfis em pontos do escoamento, procedimento que é descrito de

42
seguida (secção 3.3.1). Nos restantes itens expõe-se as possibilidades de visualização dos resultados
utilizando um exemplo em que se tem um perfil NACA 3312 com um hiper-sustentador NACA 3312
sujeitos a efeito solo.
3.3.1. Cálculo das velocidades em pontos de uma malha
De modo a se poderem calcular as velocidades (e os coeficientes de pressão) numa região do
escoamento em torno do corpo, o primeiro passo é criar uma malha de pontos resultante da
discretização dessa mesma região, tal como é visível na Figura 26.
Figura 26 - Criação de uma malha de pontos em torno do corpo.
Criada a malha de pontos, é possível agora calcular as velocidades induzidas em cada ponto. Primeiro é
necessário calcular as matrizes de influência das singularidades do corpo em cada ponto da malha nas
direções tangencial e normal, respetivamente e . Estas matrizes são calculadas tal como está
descrito na secção 2.2, embora agora não seja necessário passar do referencial local de cada painel para
o referencial global, uma vez que o referencial de cada ponto já é referencial global. Assim, a velocidade
induzida nas direções tangencial e normal em cada ponto é dada pelas seguintes expressões:
(3 - 19)
(3 - 20)
Onde o subscrito representa o número total de pontos na malha e representa o número de painéis
do corpo. As expressões acima são idênticas às utilizadas para calcular a velocidade tangencial nos
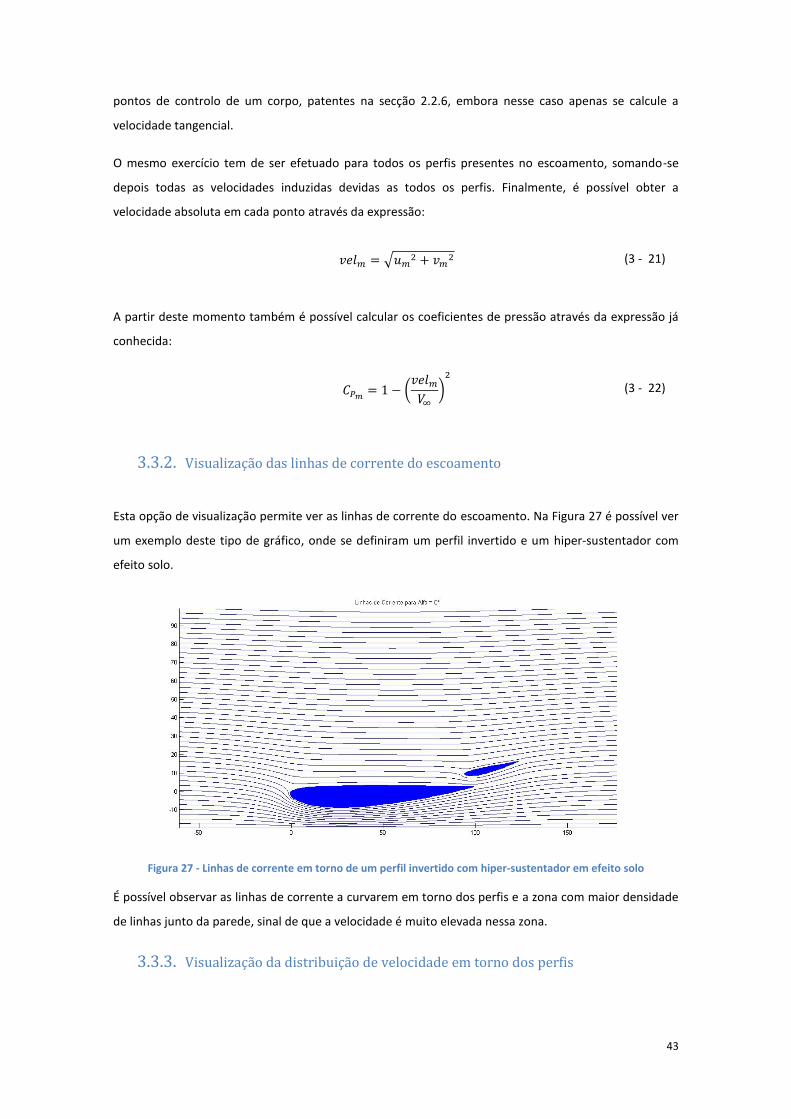
43
pontos de controlo de um corpo, patentes na secção 2.2.6, embora nesse caso apenas se calcule a
velocidade tangencial.
O mesmo exercício tem de ser efetuado para todos os perfis presentes no escoamento, somando-se
depois todas as velocidades induzidas devidas as todos os perfis. Finalmente, é possível obter a
velocidade absoluta em cada ponto através da expressão:
√
(3 - 21)
A partir deste momento também é possível calcular os coeficientes de pressão através da expressão já
conhecida:
(
)
(3 - 22)
3.3.2. Visualização das linhas de corrente do escoamento
Esta opção de visualização permite ver as linhas de corrente do escoamento. Na Figura 27 é possível ver
um exemplo deste tipo de gráfico, onde se definiram um perfil invertido e um hiper-sustentador com
efeito solo.
Figura 27 - Linhas de corrente em torno de um perfil invertido com hiper-sustentador em efeito solo
É possível observar as linhas de corrente a curvarem em torno dos perfis e a zona com maior densidade
de linhas junto da parede, sinal de que a velocidade é muito elevada nessa zona.
3.3.3. Visualização da distribuição de velocidade em torno dos perfis

44
Esta opção permite visualizar a velocidade absoluta em todo o escoamento através de curvas de nível de
velocidade, facilitando a análise do escoamento. Na Figura 28 pode-se observar um exemplo deste tipo
de gráfico, onde o limite inferior da figura representa uma vez mais a parede.
Figura 28 – Distribuição de velocidade em torno dos perfis.
3.3.4. Visualização da distribuição dos coeficientes de pressão em torno do perfis
Utilizando a expressão (3 - 22), também é possível visualizar os coeficientes de pressão no escoamento
em torno do corpo. Naturalmente, este gráfico é equivalente ao da Figura 28. Na Figura 29 apresenta-se
um exemplo deste tipo de figura.
Figura 29 - Distribuição dos coeficientes de pressão em torno dos perfis
3.3.5. Visualização dos vetores de velocidade do escoamento
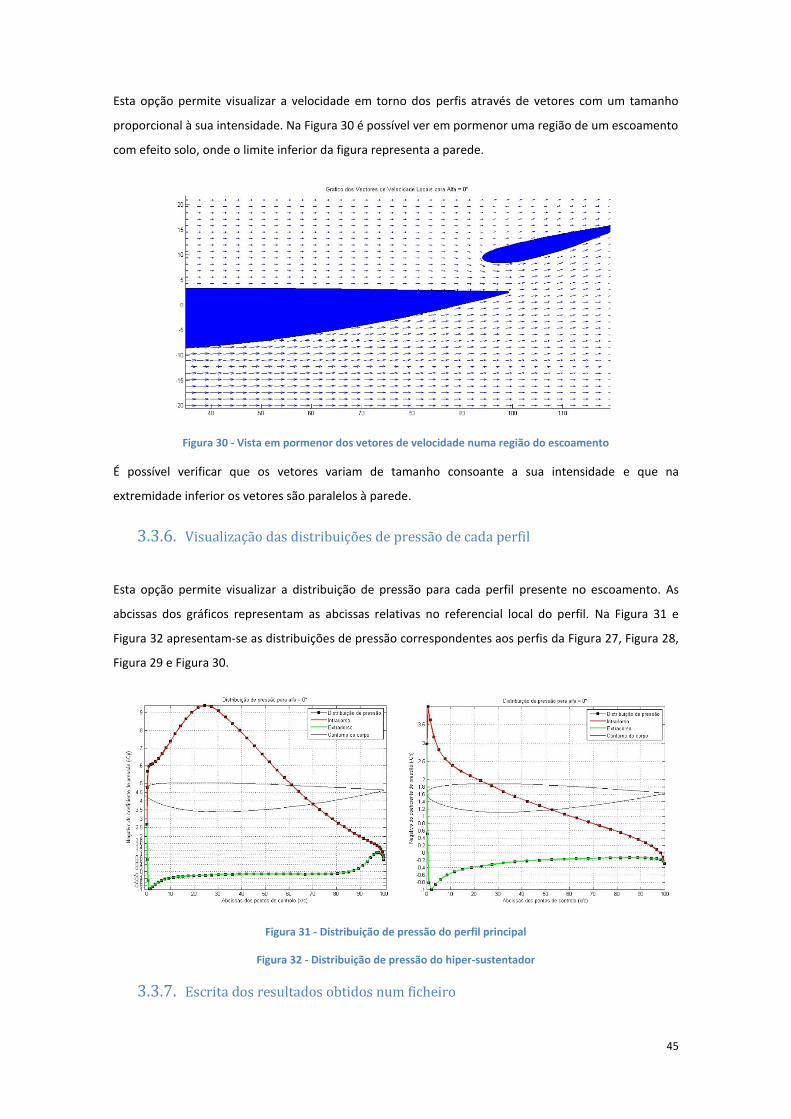
45
Esta opção permite visualizar a velocidade em torno dos perfis através de vetores com um tamanho
proporcional à sua intensidade. Na Figura 30 é possível ver em pormenor uma região de um escoamento
com efeito solo, onde o limite inferior da figura representa a parede.
Figura 30 - Vista em pormenor dos vetores de velocidade numa região do escoamento
É possível verificar que os vetores variam de tamanho consoante a sua intensidade e que na
extremidade inferior os vetores são paralelos à parede.
3.3.6. Visualização das distribuições de pressão de cada perfil
Esta opção permite visualizar a distribuição de pressão para cada perfil presente no escoamento. As
abcissas dos gráficos representam as abcissas relativas no referencial local do perfil. Na Figura 31 e
Figura 32 apresentam-se as distribuições de pressão correspondentes aos perfis da Figura 27, Figura 28,
Figura 29 e Figura 30.
Figura 31 - Distribuição de pressão do perfil principal
Figura 32 - Distribuição de pressão do hiper-sustentador
3.3.7. Escrita dos resultados obtidos num ficheiro

46
Esta última opção possibilita a escrita dos resultados obtidos para cada perfil num determinado ficheiro.
Guarda características do escoamento, tal como o ângulo de ataque e o coeficiente de sustentação,
assim como também guarda as coordenadas de cada ponto de controlo, as suas respetivas velocidades e
respetivos coeficientes de pressão.

47
4. Verificação do código
4.1. Verificação para Perfis Simples
4.1.1. Procedimento de verificação
O objectivo desta secção é o de demonstrar que o código está correcto para perfis simples. Tratando-se
de um único perfil, é possível testar perfis com solução analítica, e como tal, verificar se o erro numérico
associado à discretização dos perfis tende para zero quando o número de painéis utilizado tende para
infinito. Para esse efeito, utilizaram-se malhas que variaram entre 40 e 1280 painéis. O parâmetro de
refinamento de malha é definido como:
Em que e varia entre 40 e 1280. Assim,
variará entre 1 e 32. Com base neste parâmetro
pode-se definir a fórmula utilizada para se estudar o erro numérico [20] [21]:
( )
(4 - 1)
Na equação (4 - 1) representa a solução do parâmetro para o qual se está a estudar o erro, é uma
constante a determinar, é erro que numérico que se obteria se se utilizasse um número de painéis
infinito e é a ordem de convergência assimptótica do parâmetro. Na subsequente análise a perfis com
solução exacta, o objectivo é o de estimar caso se tenha atingido a região assimptótica e mostrar que
é desprezável, ou seja, que é da ordem de erro de arredondamento da máquina. foi determinado
pelo método dos mínimos quadrados com base nas últimas 5 malhas [22], embora se tenham utilizado
mais malhas de modo a verificar se é constante. Se for desprezável, a equação (4 - 1) pode ser
escrita na forma logarítmica, a qual irá ajudar à análise:
( )
(4 - 2)
Se estiver na região assimptótica, a equação (4 - 2) corresponderá a uma recta em escala logarítmica
com declive .
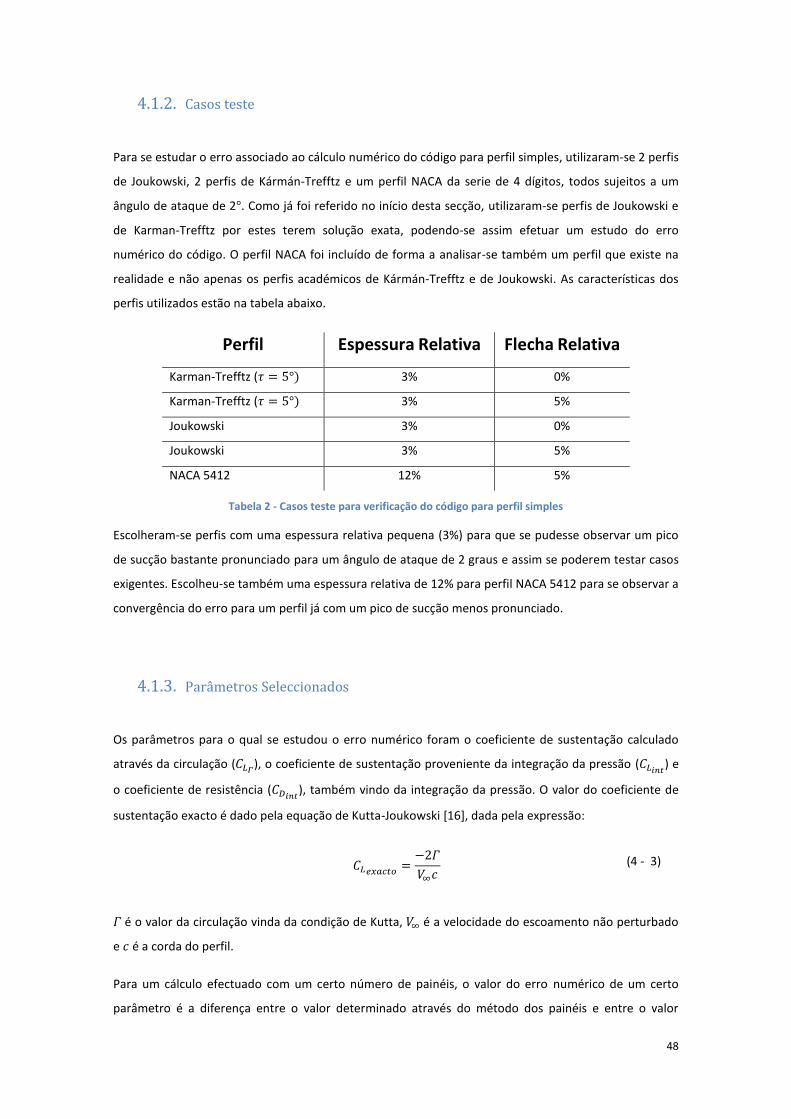
48
4.1.2. Casos teste
Para se estudar o erro associado ao cálculo numérico do código para perfil simples, utilizaram-se 2 perfis
de Joukowski, 2 perfis de Kármán-Trefftz e um perfil NACA da serie de 4 dígitos, todos sujeitos a um
ângulo de ataque de 2 . Como já foi referido no início desta secção, utilizaram-se perfis de Joukowski e
de Karman-Trefftz por estes terem solução exata, podendo-se assim efetuar um estudo do erro
numérico do código. O perfil NACA foi incluído de forma a analisar-se também um perfil que existe na
realidade e não apenas os perfis académicos de Kármán-Trefftz e de Joukowski. As características dos
perfis utilizados estão na tabela abaixo.
Perfil Espessura Relativa Flecha Relativa
Karman-Trefftz ( ) 3% 0%
Karman-Trefftz ( ) 3% 5%
Joukowski 3% 0%
Joukowski 3% 5%
NACA 5412 12% 5%
Tabela 2 - Casos teste para verificação do código para perfil simples
Escolheram-se perfis com uma espessura relativa pequena (3%) para que se pudesse observar um pico
de sucção bastante pronunciado para um ângulo de ataque de 2 graus e assim se poderem testar casos
exigentes. Escolheu-se também uma espessura relativa de 12% para perfil NACA 5412 para se observar a
convergência do erro para um perfil já com um pico de sucção menos pronunciado.
4.1.3. Parâmetros Seleccionados
Os parâmetros para o qual se estudou o erro numérico foram o coeficiente de sustentação calculado
através da circulação ( ), o coeficiente de sustentação proveniente da integração da pressão ( ) e
o coeficiente de resistência ( ), também vindo da integração da pressão. O valor do coeficiente de
sustentação exacto é dado pela equação de Kutta-Joukowski [16], dada pela expressão:
(4 - 3)
é o valor da circulação vinda da condição de Kutta, é a velocidade do escoamento não perturbado
e é a corda do perfil.
Para um cálculo efectuado com um certo número de painéis, o valor do erro numérico de um certo
parâmetro é a diferença entre o valor determinado através do método dos painéis e entre o valor
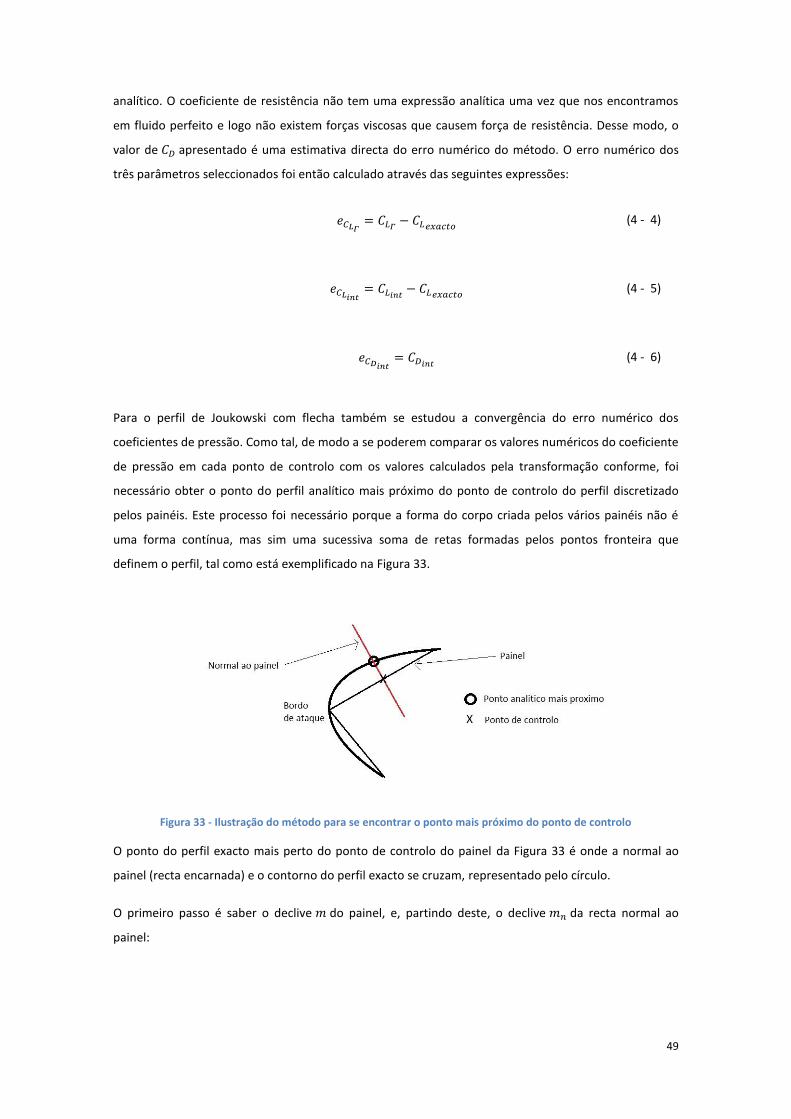
49
analítico. O coeficiente de resistência não tem uma expressão analítica uma vez que nos encontramos
em fluido perfeito e logo não existem forças viscosas que causem força de resistência. Desse modo, o
valor de apresentado é uma estimativa directa do erro numérico do método. O erro numérico dos
três parâmetros seleccionados foi então calculado através das seguintes expressões:
(4 - 4)
(4 - 5)
(4 - 6)
Para o perfil de Joukowski com flecha também se estudou a convergência do erro numérico dos
coeficientes de pressão. Como tal, de modo a se poderem comparar os valores numéricos do coeficiente
de pressão em cada ponto de controlo com os valores calculados pela transformação conforme, foi
necessário obter o ponto do perfil analítico mais próximo do ponto de controlo do perfil discretizado
pelos painéis. Este processo foi necessário porque a forma do corpo criada pelos vários painéis não é
uma forma contínua, mas sim uma sucessiva soma de retas formadas pelos pontos fronteira que
definem o perfil, tal como está exemplificado na Figura 33.
Figura 33 - Ilustração do método para se encontrar o ponto mais próximo do ponto de controlo
O ponto do perfil exacto mais perto do ponto de controlo do painel da Figura 33 é onde a normal ao
painel (recta encarnada) e o contorno do perfil exacto se cruzam, representado pelo círculo.
O primeiro passo é saber o declive do painel, e, partindo deste, o declive da recta normal ao
painel:

50
(4 - 7)
(4 - 8)
Com base nos declives, para se determinar o ponto recorreu-se a uma função ( ) que corresponde à
diferença entre o declive de uma recta formada entre o ponto de controlo e o ponto a determinar, e
entre o declive da recta normal ao painel. Assim, quando a função ( ) for zero, as duas rectas serão
iguais e estarão encontradas as coordenadas do ponto mais próximo. A função ( ) é dada então pela
expressão:
( ) ( ) ( )
(4 - 9)
Onde ( ) e ( ) são as coordenadas do ponto transformado do contorno exacto e e são as
coordenadas do ponto de controlo de um dado painel. Na Figura 34 é possível compreender melhor a
nomenclatura utilizada.
Figura 34 - Nomenclatura utilizada
Efectuando este procedimento para todos os painéis, sempre que a função ( ) tender para zero
(utilizou-se uma tolerância de ) para um determinado painel, sabe-se o valor do angulo para o
qual a transformação conforme originou o ponto ( ), ( ), sendo depois possível com esse valor
calcular a solução analítica do coeficiente de pressão para esse respectivo ponto. Seguindo este
procedimento para todos os painéis do perfil, obtém-se a estimativa do erro numérico médio do
coeficiente de pressão utilizando a norma , dada pela seguinte expressão:
∑ | |
(4 - 10)
51
4.1.4. Resultados
Nesta secção serão apresentados os resultados obtidos para os vários perfis analisados. Os resultados
são apresentados em forma de gráfico, onde se mostram as respetivas ordens de convergência para as
quantidades analisadas, que são, como já referido, o coeficiente de sustentação vindo da circulação e o
coeficiente de sustentação e de resistência vindos da integração. Graficamente mostra-se o erro em
função do parâmetro de refinamento de malha
, que tal como referido no início desta secção,
relaciona o número de painéis utilizado para um determinado cálculo com o número de painéis
, que representa o número máximo de painéis utilizado nesta verificação. O número mínimo
de painéis utilizado neste procedimento foi 40, pelo que o valor de
máximo será 32. É preciso notar
que o valor de p encontrado para cada um dos parâmetros é uma interpolação dos últimos 5 resultados,
obtidos com a matriz mais fina (região à esquerda no gráfico) .
Na Figura 35 apresentam-se os gráficos com os resultados obtidos para o perfil de Kármán-Trefftz
simétrico.
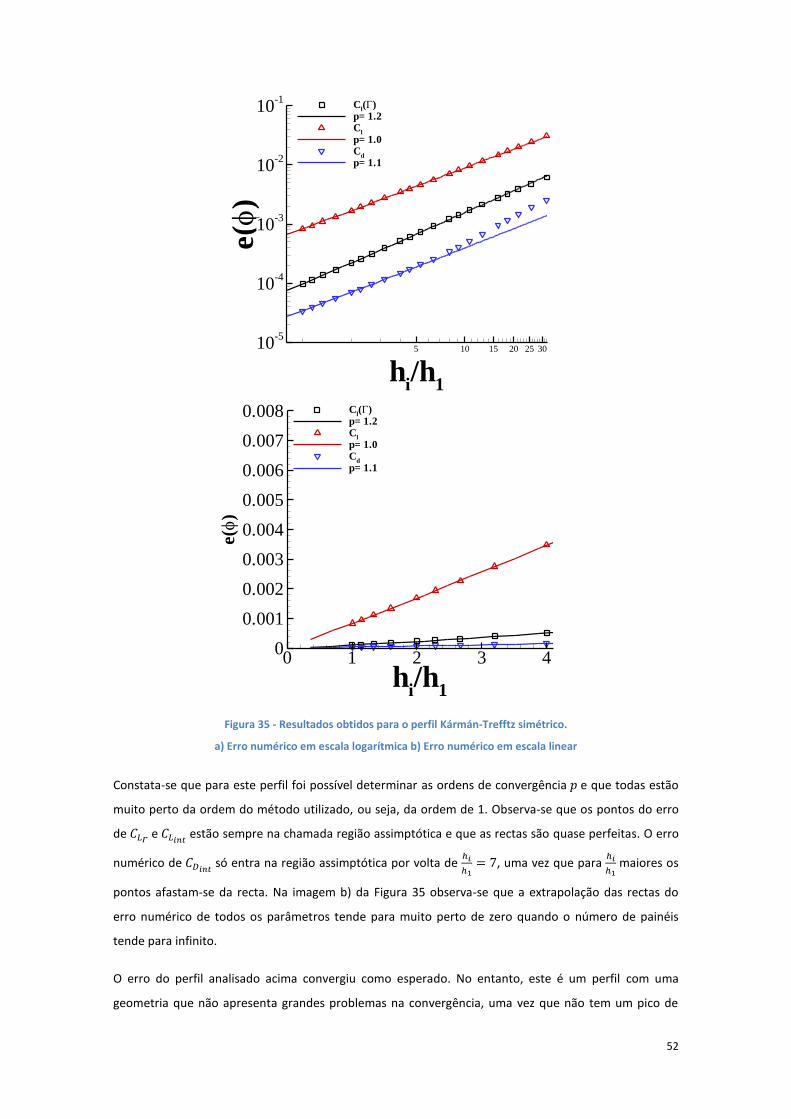
52
Figura 35 - Resultados obtidos para o perfil Kármán-Trefftz simétrico.
a) Erro numérico em escala logarítmica b) Erro numérico em escala linear
Constata-se que para este perfil foi possível determinar as ordens de convergência e que todas estão
muito perto da ordem do método utilizado, ou seja, da ordem de 1. Observa-se que os pontos do erro
de e estão sempre na chamada região assimptótica e que as rectas são quase perfeitas. O erro
numérico de só entra na região assimptótica por volta de
, uma vez que para
maiores os
pontos afastam-se da recta. Na imagem b) da Figura 35 observa-se que a extrapolação das rectas do
erro numérico de todos os parâmetros tende para muito perto de zero quando o número de painéis
tende para infinito.
O erro do perfil analisado acima convergiu como esperado. No entanto, este é um perfil com uma
geometria que não apresenta grandes problemas na convergência, uma vez que não tem um pico de
hi/h
1
e(
)
5 10 15 20 25 3010-5
10-4
10-3
10-2
10-1
Cl()
p= 1.2C
l
p= 1.0C
d
p= 1.1
hi/h
1
e(
)
0 1 2 3 40
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008 Cl()
p= 1.2C
l
p= 1.0C
d
p= 1.1
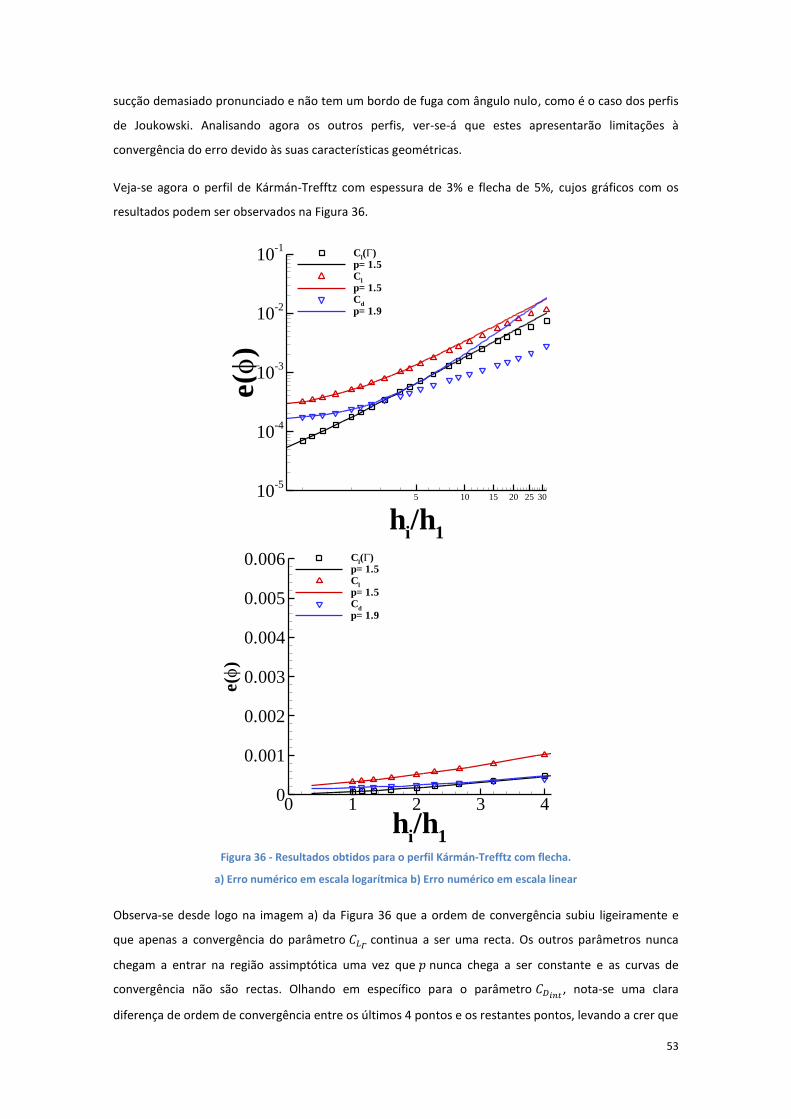
53
sucção demasiado pronunciado e não tem um bordo de fuga com ângulo nulo, como é o caso dos perfis
de Joukowski. Analisando agora os outros perfis, ver-se-á que estes apresentarão limitações à
convergência do erro devido às suas características geométricas.
Veja-se agora o perfil de Kármán-Trefftz com espessura de 3% e flecha de 5%, cujos gráficos com os
resultados podem ser observados na Figura 36.
Figura 36 - Resultados obtidos para o perfil Kármán-Trefftz com flecha.
a) Erro numérico em escala logarítmica b) Erro numérico em escala linear
Observa-se desde logo na imagem a) da Figura 36 que a ordem de convergência subiu ligeiramente e
que apenas a convergência do parâmetro continua a ser uma recta. Os outros parâmetros nunca
chegam a entrar na região assimptótica uma vez que nunca chega a ser constante e as curvas de
convergência não são rectas. Olhando em específico para o parâmetro , nota-se uma clara
diferença de ordem de convergência entre os últimos 4 pontos e os restantes pontos, levando a crer que
hi/h
1
e(
)
5 10 15 20 25 3010-5
10-4
10-3
10-2
10-1
Cl()
p= 1.5C
l
p= 1.5C
d
p= 1.9
hi/h
1
e(
)
0 1 2 3 40
0.001
0.002
0.003
0.004
0.005
0.006 Cl()
p= 1.5C
l
p= 1.5C
d
p= 1.9
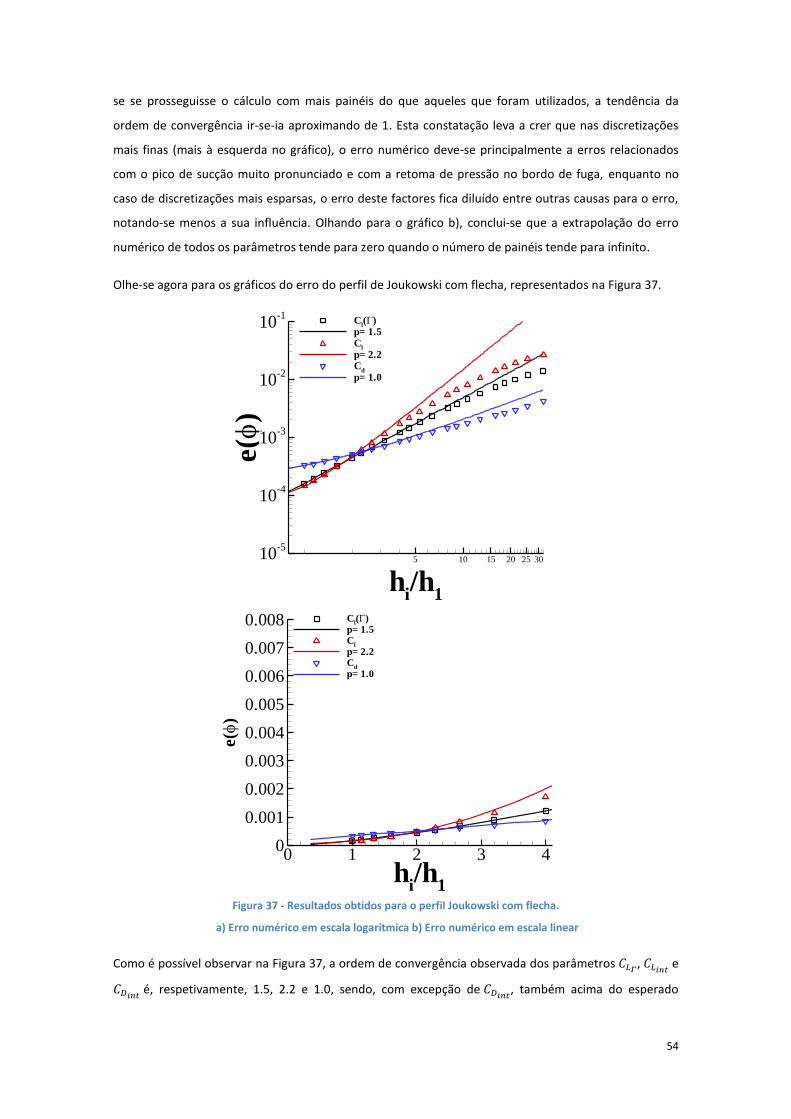
54
se se prosseguisse o cálculo com mais painéis do que aqueles que foram utilizados, a tendência da
ordem de convergência ir-se-ia aproximando de 1. Esta constatação leva a crer que nas discretizações
mais finas (mais à esquerda no gráfico), o erro numérico deve-se principalmente a erros relacionados
com o pico de sucção muito pronunciado e com a retoma de pressão no bordo de fuga, enquanto no
caso de discretizações mais esparsas, o erro deste factores fica diluído entre outras causas para o erro,
notando-se menos a sua influência. Olhando para o gráfico b), conclui-se que a extrapolação do erro
numérico de todos os parâmetros tende para zero quando o número de painéis tende para infinito.
Olhe-se agora para os gráficos do erro do perfil de Joukowski com flecha, representados na Figura 37.
Figura 37 - Resultados obtidos para o perfil Joukowski com flecha.
a) Erro numérico em escala logarítmica b) Erro numérico em escala linear
Como é possível observar na Figura 37, a ordem de convergência observada dos parâmetros , e
é, respetivamente, 1.5, 2.2 e 1.0, sendo, com excepção de , também acima do esperado
hi/h
1
e(
)
5 10 15 20 25 3010-5
10-4
10-3
10-2
10-1
Cl()
p= 1.5C
l
p= 2.2C
d
p= 1.0
hi/h
1
e(
)
0 1 2 3 40
0.001
0.002
0.003
0.004
0.005
0.006
0.007
0.008 Cl()
p= 1.5C
l
p= 2.2C
d
p= 1.0

55
teoricamente. Uma vez mais a ordem de convergência de um dos parâmetros, neste caso , é
afectada pelo facto de haver uma diferença grande entre os 4 últimos pontos e os restantes. A diferença
da ordem de convergência entre e é de 0.7, mas no entanto os últimos 4 pontos estão quase
sobrepostos. A ordem de convergência destes parâmetros só chegaria perto de 1 com mais painéis
utilizados. No entanto, como se pode ver no gráfico b) da Figura 37, a ordem de grandeza do erro
numérico quando as curvas são extrapoladas para discretizações mais finas é muito pequena.
Para este perfil também se analisou o comportamento da norma (eq. (4 - 10)). O gráfico
correspondente está demonstrado na Figura 38.
Figura 38 - Resultados da norma L1 para o perfil Joukowski com flecha
É possível verificar que a ordem de convergência é 1.3, embora à direita no gráfico os pontos nunca
cheguem a entrar na região assimptótica. A relativa inconstância do erro para as discretizações mais
esparsas (à direita no gráfico) deve-se ao facto de haver um pico de sucção bastante pronunciado, cuja
localização é mais variável quanto menos painéis houver a discretizar a zona da sua localização. À
medida que se aumenta o número de painéis, os resultados vão cada vez mais tendendo para uma reta,
tal como previsto. Seriam necessárias discretizações mais finas para se chegar a uma ordem de
convergência assimptótica recta e de valor 1.
Para efeitos ilustrativos, na Figura 39 e Figura 40 está representada a distribuição de pressão
correspondente à solução numérica (encarnado) e a distribuição de pressão correspondente à solução
analítica encontrada nos pontos do perfil analítico mais próximo do perfil discretizado (azul),
correspondente ao procedimento explicitado na secção 4.1.2.
hi/h
1
e(
)
5 10 1510-3
10-2
10-1
L1 Cpp= 1.3
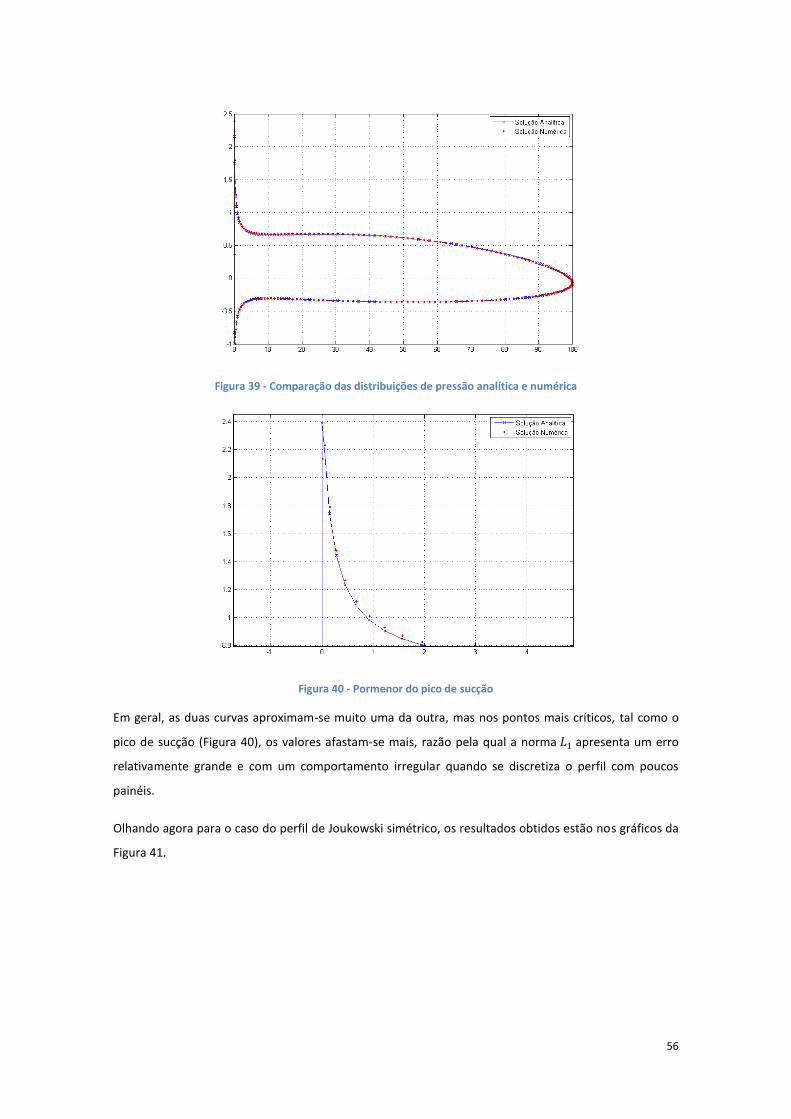
56
Figura 39 - Comparação das distribuições de pressão analítica e numérica
Figura 40 - Pormenor do pico de sucção
Em geral, as duas curvas aproximam-se muito uma da outra, mas nos pontos mais críticos, tal como o
pico de sucção (Figura 40), os valores afastam-se mais, razão pela qual a norma apresenta um erro
relativamente grande e com um comportamento irregular quando se discretiza o perfil com poucos
painéis.
Olhando agora para o caso do perfil de Joukowski simétrico, os resultados obtidos estão nos gráficos da
Figura 41.
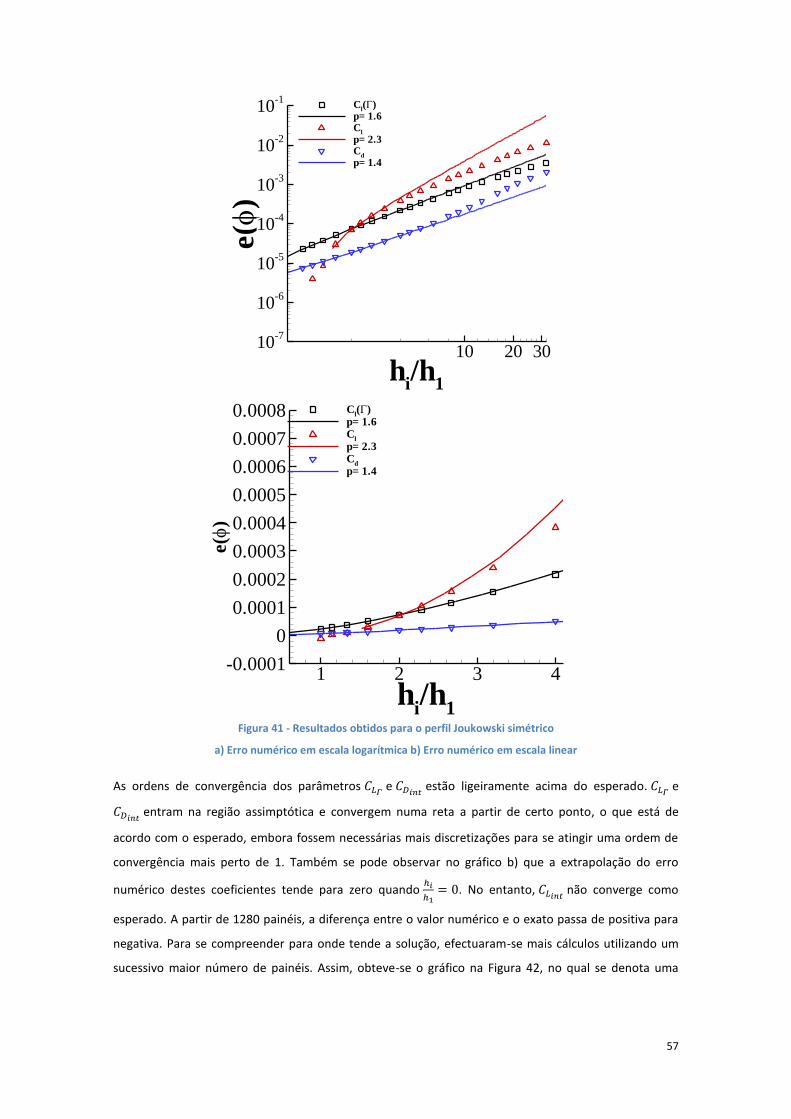
57
Figura 41 - Resultados obtidos para o perfil Joukowski simétrico
a) Erro numérico em escala logarítmica b) Erro numérico em escala linear
As ordens de convergência dos parâmetros e estão ligeiramente acima do esperado. e
entram na região assimptótica e convergem numa reta a partir de certo ponto, o que está de
acordo com o esperado, embora fossem necessárias mais discretizações para se atingir uma ordem de
convergência mais perto de 1. Também se pode observar no gráfico b) que a extrapolação do erro
numérico destes coeficientes tende para zero quando
. No entanto, não converge como
esperado. A partir de 1280 painéis, a diferença entre o valor numérico e o exato passa de positiva para
negativa. Para se compreender para onde tende a solução, efectuaram-se mais cálculos utilizando um
sucessivo maior número de painéis. Assim, obteve-se o gráfico na Figura 42, no qual se denota uma
hi/h
1
e(
)
10 20 3010
-7
10-6
10-5
10-4
10-3
10-2
10-1
Cl()
p= 1.6C
l
p= 2.3C
d
p= 1.4
hi/h
1
e(
)
1 2 3 4-0.0001
0
0.0001
0.0002
0.0003
0.0004
0.0005
0.0006
0.0007
0.0008 Cl()
p= 1.6C
l
p= 2.3C
d
p= 1.4
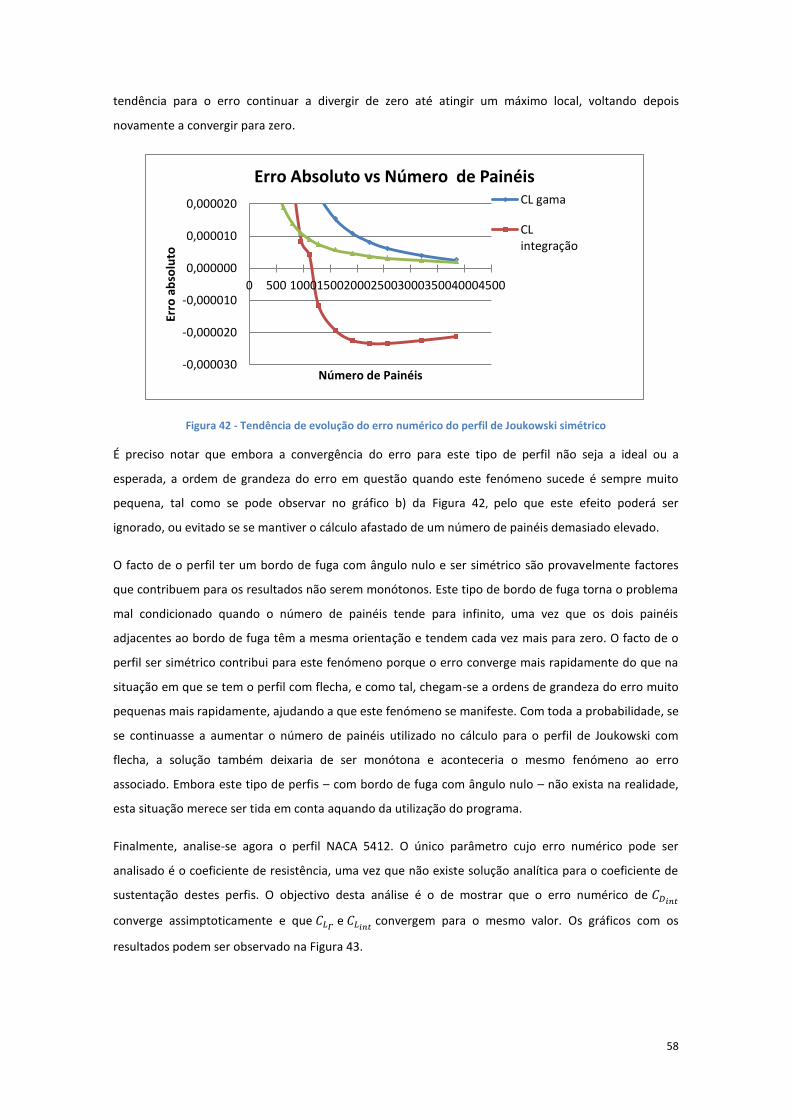
58
tendência para o erro continuar a divergir de zero até atingir um máximo local, voltando depois
novamente a convergir para zero.
Figura 42 - Tendência de evolução do erro numérico do perfil de Joukowski simétrico
É preciso notar que embora a convergência do erro para este tipo de perfil não seja a ideal ou a
esperada, a ordem de grandeza do erro em questão quando este fenómeno sucede é sempre muito
pequena, tal como se pode observar no gráfico b) da Figura 42, pelo que este efeito poderá ser
ignorado, ou evitado se se mantiver o cálculo afastado de um número de painéis demasiado elevado.
O facto de o perfil ter um bordo de fuga com ângulo nulo e ser simétrico são provavelmente factores
que contribuem para os resultados não serem monótonos. Este tipo de bordo de fuga torna o problema
mal condicionado quando o número de painéis tende para infinito, uma vez que os dois painéis
adjacentes ao bordo de fuga têm a mesma orientação e tendem cada vez mais para zero. O facto de o
perfil ser simétrico contribui para este fenómeno porque o erro converge mais rapidamente do que na
situação em que se tem o perfil com flecha, e como tal, chegam-se a ordens de grandeza do erro muito
pequenas mais rapidamente, ajudando a que este fenómeno se manifeste. Com toda a probabilidade, se
se continuasse a aumentar o número de painéis utilizado no cálculo para o perfil de Joukowski com
flecha, a solução também deixaria de ser monótona e aconteceria o mesmo fenómeno ao erro
associado. Embora este tipo de perfis – com bordo de fuga com ângulo nulo – não exista na realidade,
esta situação merece ser tida em conta aquando da utilização do programa.
Finalmente, analise-se agora o perfil NACA 5412. O único parâmetro cujo erro numérico pode ser
analisado é o coeficiente de resistência, uma vez que não existe solução analítica para o coeficiente de
sustentação destes perfis. O objectivo desta análise é o de mostrar que o erro numérico de
converge assimptoticamente e que e convergem para o mesmo valor. Os gráficos com os
resultados podem ser observado na Figura 43.
-0,000030
-0,000020
-0,000010
0,000000
0,000010
0,000020
0 500 10001500200025003000350040004500
Erro
ab
solu
to
Número de Painéis
Erro Absoluto vs Número de Painéis CL gama
CLintegração
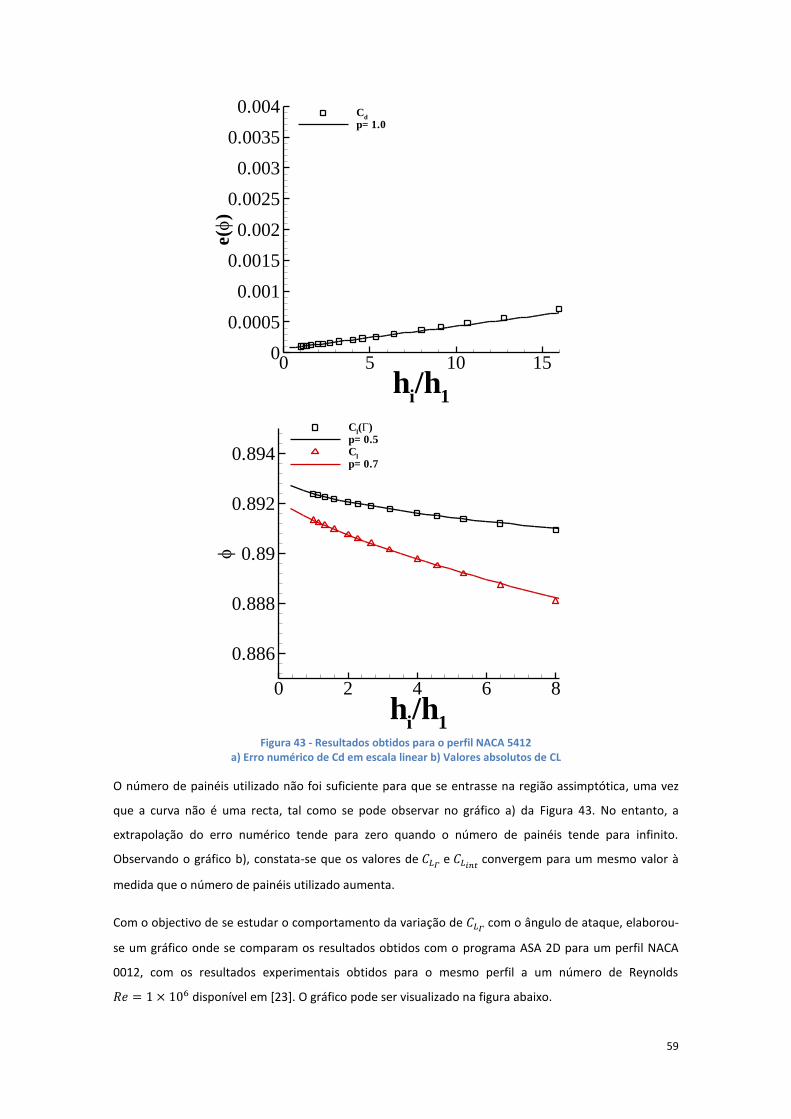
59
Figura 43 - Resultados obtidos para o perfil NACA 5412
a) Erro numérico de Cd em escala linear b) Valores absolutos de CL
O número de painéis utilizado não foi suficiente para que se entrasse na região assimptótica, uma vez
que a curva não é uma recta, tal como se pode observar no gráfico a) da Figura 43. No entanto, a
extrapolação do erro numérico tende para zero quando o número de painéis tende para infinito.
Observando o gráfico b), constata-se que os valores de e convergem para um mesmo valor à
medida que o número de painéis utilizado aumenta.
Com o objectivo de se estudar o comportamento da variação de com o ângulo de ataque, elaborou-
se um gráfico onde se comparam os resultados obtidos com o programa ASA 2D para um perfil NACA
0012, com os resultados experimentais obtidos para o mesmo perfil a um número de Reynolds
disponível em [23]. O gráfico pode ser visualizado na figura abaixo.
hi/h
1
e(
)
0 5 10 150
0.0005
0.001
0.0015
0.002
0.0025
0.003
0.0035
0.004 Cd
p= 1.0
hi/h
1
0 2 4 6 8
0.886
0.888
0.89
0.892
0.894
Cl()
p= 0.5C
l
p= 0.7
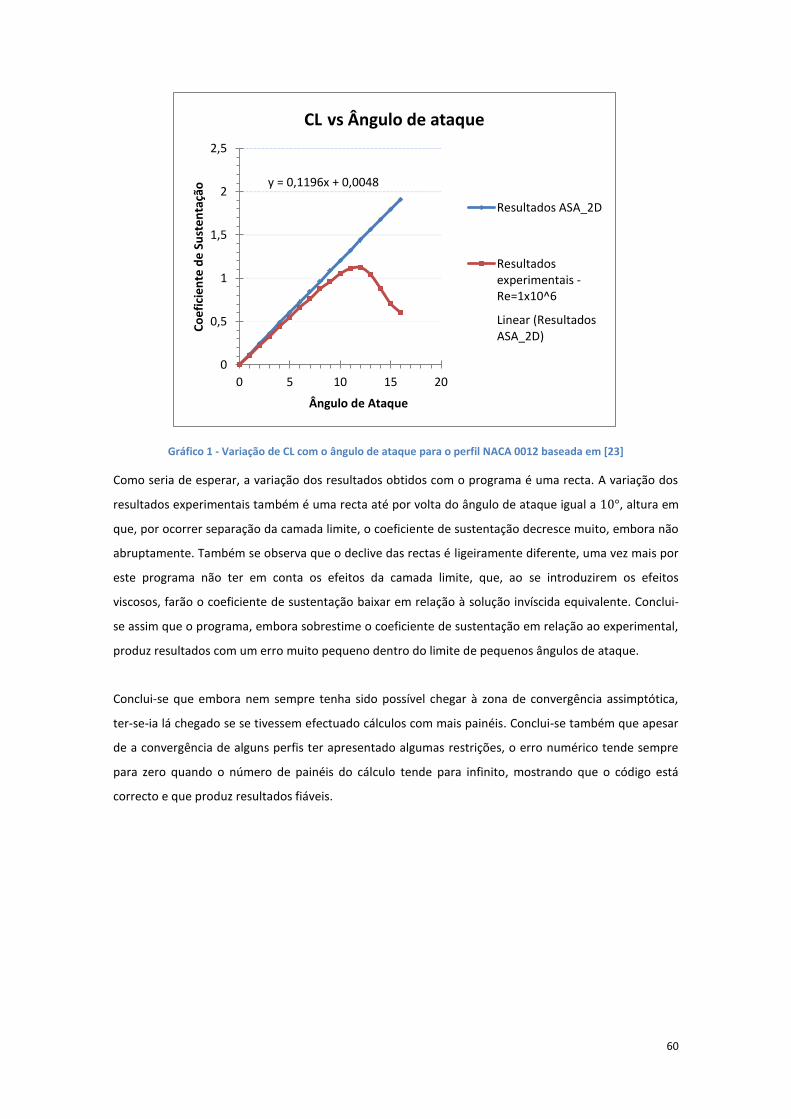
60
Gráfico 1 - Variação de CL com o ângulo de ataque para o perfil NACA 0012 baseada em [23]
Como seria de esperar, a variação dos resultados obtidos com o programa é uma recta. A variação dos
resultados experimentais também é uma recta até por volta do ângulo de ataque igual a , altura em
que, por ocorrer separação da camada limite, o coeficiente de sustentação decresce muito, embora não
abruptamente. Também se observa que o declive das rectas é ligeiramente diferente, uma vez mais por
este programa não ter em conta os efeitos da camada limite, que, ao se introduzirem os efeitos
viscosos, farão o coeficiente de sustentação baixar em relação à solução invíscida equivalente. Conclui-
se assim que o programa, embora sobrestime o coeficiente de sustentação em relação ao experimental,
produz resultados com um erro muito pequeno dentro do limite de pequenos ângulos de ataque.
Conclui-se que embora nem sempre tenha sido possível chegar à zona de convergência assimptótica,
ter-se-ia lá chegado se se tivessem efectuado cálculos com mais painéis. Conclui-se também que apesar
de a convergência de alguns perfis ter apresentado algumas restrições, o erro numérico tende sempre
para zero quando o número de painéis do cálculo tende para infinito, mostrando que o código está
correcto e que produz resultados fiáveis.
y = 0,1196x + 0,0048
0
0,5
1
1,5
2
2,5
0 5 10 15 20
Co
efi
cie
nte
de
Su
ste
nta
ção
Ângulo de Ataque
CL vs Ângulo de ataque
Resultados ASA_2D
Resultadosexperimentais -Re=1x10^6
Linear (ResultadosASA_2D)
61
4.2. Verificação para Multi-Componente
4.2.1. Procedimento de verificação
No procedimento de verificação para perfis simples descrito anteriormente (pág. 47), efetuou-se um
estudo da convergência do erro para três parâmetros diferentes, nomeadamente o coeficiente de
sustentação calculado através da circulação ( ) e os coeficientes de sustentação ( ) e de
resistência ( ) calculados pela integração da pressão. No entanto, uma vez que não se sabe de
antemão a solução exacta de cálculos com vários corpos sustentadores (ao contrário do caso da
verificação para perfil simples), neste caso efetuou-se antes um estudo da incerteza associada aos
parâmetros calculados. Para além disso, também ao invés do que foi feito para os perfis simples, nesta
verificação para multi-componente apenas se estudou a incerteza associada ao parâmetro . Não se
efetuou este estudo para o por escolha, pois tendo já este coeficiente sido analisado aquando da
verificação para o perfil simples, não houve necessidade de o analisar aqui por o parâmetro de maior
interesse nesta implementação ser o coeficiente de sustentação. Também não se estudou a incerteza
associada ao pelo facto de numa situação em que se tenha mais de um perfil não ser possível utilizar
a equação (2 - 84), tal como exposto na secção 2.4.2. Tendo em conta que numa situação em que se
tenha mais de um perfil – o caso desta verificação – o escoamento em torno de qualquer destes perfis
não é uniforme devido à influência dos outros perfis, esta equação não pode ser aplicada nestes casos.
Como tal, os valores calculados para o para um perfil individual numa situação em que se tenha
mais do que um componente, não têm validade, razão pela qual se ignorou esse parâmetro nesta
verificação.
Para as três situações expostas na Tabela 3, efetuaram-se cálculos entre os 80 e os 320 painéis com 9
pontos neste intervalo. Tomou-se como garantia de precisão suficiente um número de painéis que
garantisse uma variação inferior a 1%, que, tal como se verá adiante, foi obtida no intervalo do número
de painéis escolhido.
4.2.2. Casos Teste
No procedimento de verificação da validade do programa para vários componentes, efetuou-se primeiro
um estudo do comportamento do coeficiente de sustentação à medida que a distância à parede tende
para infinito, de modo a comprovar que a solução tende para aquela do perfil isolado. Assim, para o
perfil 4412 com um ângulo de ataque a 2 apresenta-se um gráfico que demonstra esta tendência.
Escolheram-se também 3 casos para análise, todos sob a influência do efeito solo, de modo a estimar-
se a incerteza associada ao cálculo. Estes casos estão expostos na Tabela 3:
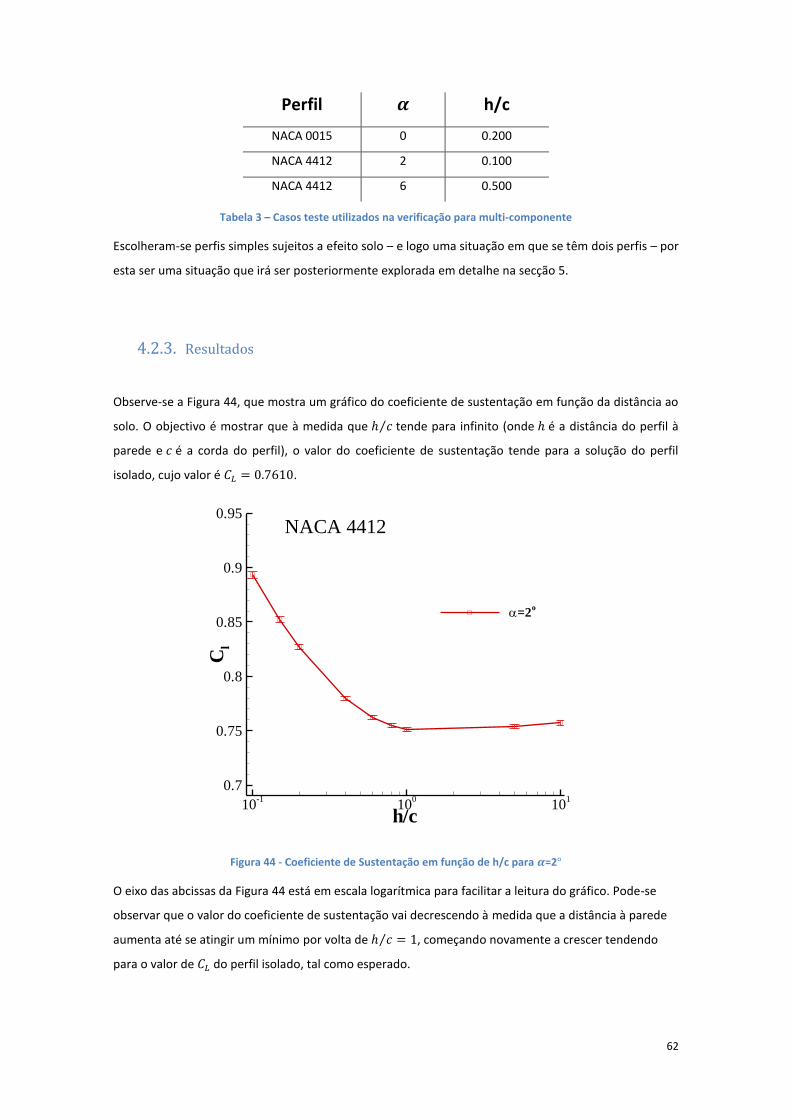
62
Perfil h/c
NACA 0015 0 0.200
NACA 4412 2 0.100
NACA 4412 6 0.500
Tabela 3 – Casos teste utilizados na verificação para multi-componente
Escolheram-se perfis simples sujeitos a efeito solo – e logo uma situação em que se têm dois perfis – por
esta ser uma situação que irá ser posteriormente explorada em detalhe na secção 5.
4.2.3. Resultados
Observe-se a Figura 44, que mostra um gráfico do coeficiente de sustentação em função da distância ao
solo. O objectivo é mostrar que à medida que ⁄ tende para infinito (onde é a distância do perfil à
parede e é a corda do perfil), o valor do coeficiente de sustentação tende para a solução do perfil
isolado, cujo valor é .
Figura 44 - Coeficiente de Sustentação em função de h/c para =2
O eixo das abcissas da Figura 44 está em escala logarítmica para facilitar a leitura do gráfico. Pode-se
observar que o valor do coeficiente de sustentação vai decrescendo à medida que a distância à parede
aumenta até se atingir um mínimo por volta de ⁄ , começando novamente a crescer tendendo
para o valor de do perfil isolado, tal como esperado.
h/c
Cl
10-1
100
101
0.7
0.75
0.8
0.85
0.9
0.95
=2o
NACA 4412
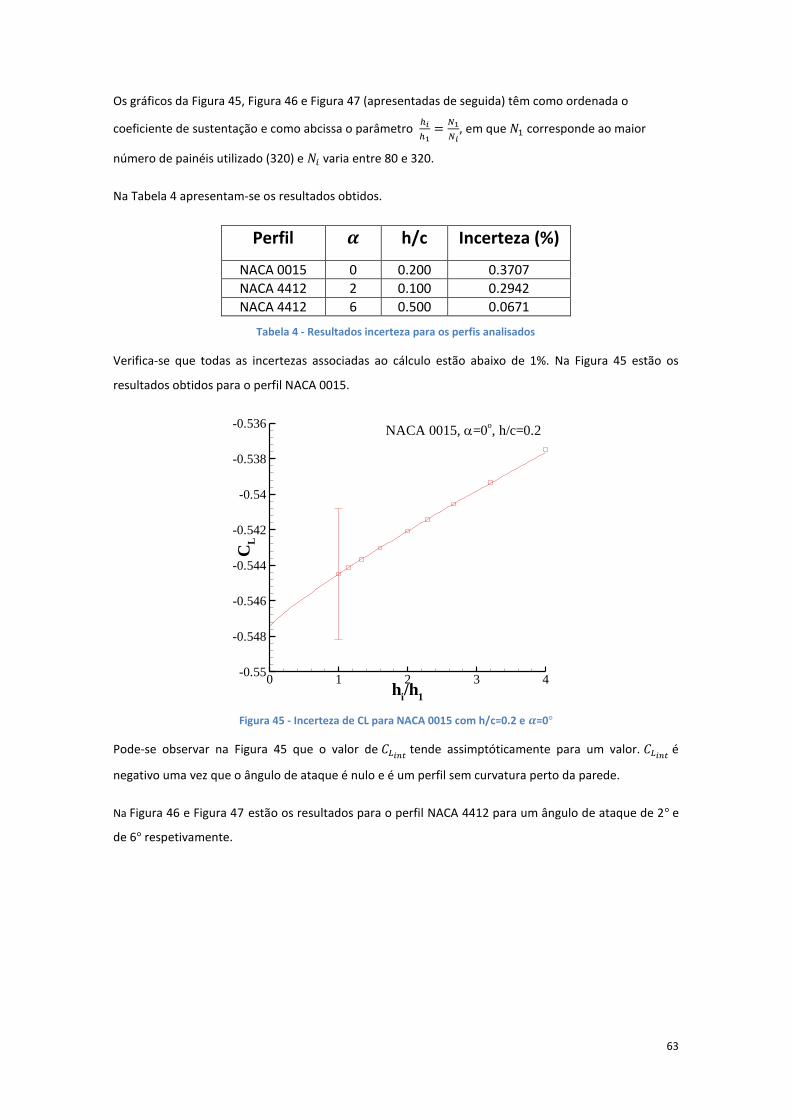
63
Os gráficos da Figura 45, Figura 46 e Figura 47 (apresentadas de seguida) têm como ordenada o
coeficiente de sustentação e como abcissa o parâmetro
, em que corresponde ao maior
número de painéis utilizado (320) e varia entre 80 e 320.
Na Tabela 4 apresentam-se os resultados obtidos.
Perfil h/c Incerteza (%)
NACA 0015 0 0.200 0.3707
NACA 4412 2 0.100 0.2942
NACA 4412 6 0.500 0.0671
Tabela 4 - Resultados incerteza para os perfis analisados
Verifica-se que todas as incertezas associadas ao cálculo estão abaixo de 1%. Na Figura 45 estão os
resultados obtidos para o perfil NACA 0015.
Figura 45 - Incerteza de CL para NACA 0015 com h/c=0.2 e =0
Pode-se observar na Figura 45 que o valor de tende assimptóticamente para um valor. é
negativo uma vez que o ângulo de ataque é nulo e é um perfil sem curvatura perto da parede.
Na Figura 46 e Figura 47 estão os resultados para o perfil NACA 4412 para um ângulo de ataque de 2 e
de 6 respetivamente.
hi/h
1
CL
0 1 2 3 4-0.55
-0.548
-0.546
-0.544
-0.542
-0.54
-0.538
-0.536NACA 0015, =0
o, h/c=0.2
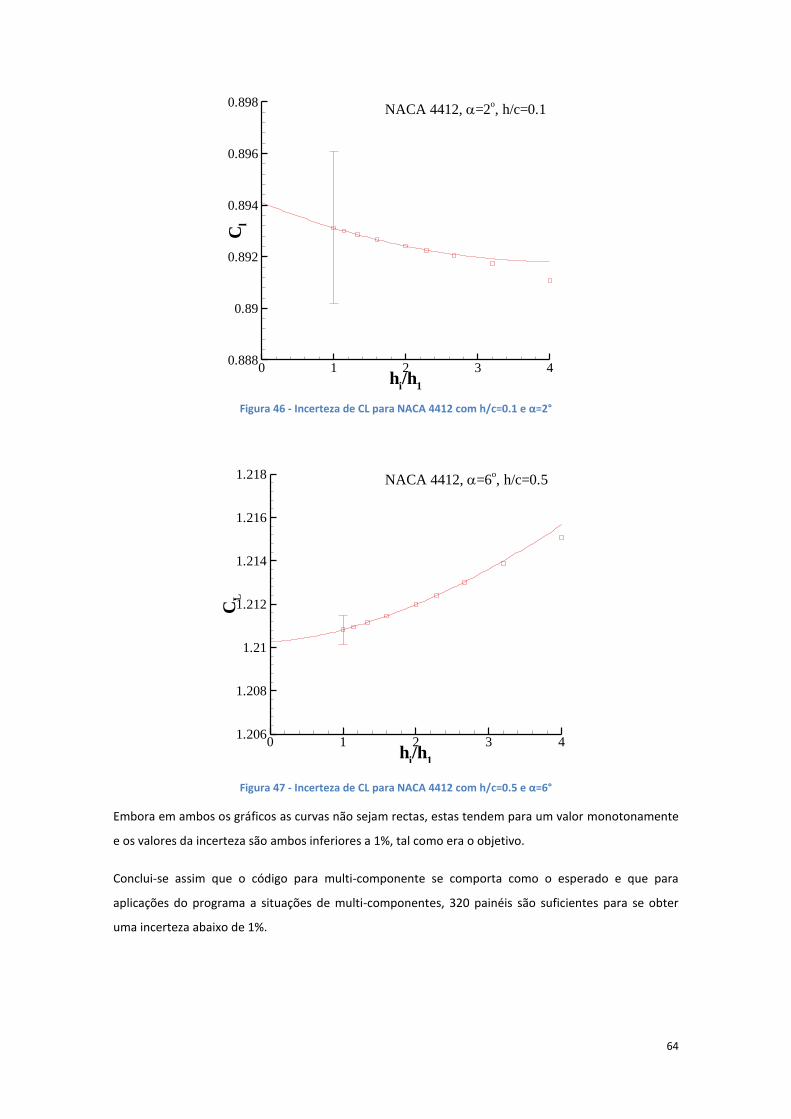
64
Figura 46 - Incerteza de CL para NACA 4412 com h/c=0.1 e α=2°
Figura 47 - Incerteza de CL para NACA 4412 com h/c=0.5 e α=6°
Embora em ambos os gráficos as curvas não sejam rectas, estas tendem para um valor monotonamente
e os valores da incerteza são ambos inferiores a 1%, tal como era o objetivo.
Conclui-se assim que o código para multi-componente se comporta como o esperado e que para
aplicações do programa a situações de multi-componentes, 320 painéis são suficientes para se obter
uma incerteza abaixo de 1%.
hi/h
1
Cl
0 1 2 3 40.888
0.89
0.892
0.894
0.896
0.898NACA 4412, =2
o, h/c=0.1
hi/h
1
CL
0 1 2 3 41.206
1.208
1.21
1.212
1.214
1.216
1.218 NACA 4412, =6o, h/c=0.5
65
5. Aplicações Práticas
Nesta secção pretendem-se ilustrar possíveis aplicações do código, demonstrando a qualidade dos
resultados quando comparados com a literatura. Não se abordarão os exemplos numa perspectiva de
análise quantitativa dos resultados, mas sim numa perspectiva de mostrar que os resultados obtidos
seguem as mesmas tendências de variação em relação a resultados experimentais ou de CFD, assim
como também se aproveita para dar a conhecer os potenciais usos que se poderão dar ao código. Numa
primeira parte aplicar-se-á o programa a situações de efeito solo, quer para perfis normais, quer para
perfis invertidos. Numa segunda parte estudar-se-á a variação do coeficiente de sustentação e do pico
de sucção de um rotor duplo de uma turbina eólica de eixo vertical. Em todos os resultados
apresentados inclui-se uma barra de incerteza associada a cada ponto calculado, de modo a demonstrar
que a incerteza dos cálculos é muito inferior às variações dos resultados devido à alteração dos
parâmetros do cálculo.
5.1. Perfis sujeitos a Efeito solo
Uma aplicação direta deste programa é o efeito solo. Uma vez que é fácil simular este efeito através do
método das imagens, esta é uma ferramenta rápida e fiável de se obter uma estimativa do coeficiente
de sustentação e da distribuição de pressão em situações de efeito solo. De um modo geral, a eficiência
aerodinâmica de um determinado perfil aumenta quando este se encontra perto do solo [24]. Este
efeito deve-se a dois factores, um devido à diminuição do coeficiente de resistência induzido, e outro
devido ao aumento do coeficiente de sustentação. Nas aplicações seguintes apenas se irá explorar o
efeito do aumento do , uma vez que por se tratar de um modelo bidimensional o induzido não é
contabilizado, e como tal, não é possível detetar uma redução deste coeficiente.
Assim, de seguida apresentar-se-ão diversos resultados experimentais e de CFD em que se tenha
analisado o efeito solo, sendo estes depois comparados com os resultados obtidos pelo código
desenvolvido. O objectivo desta análise é o de captar as mesmas tendências de variação do coeficiente
de sustentação para várias distâncias ao solo quando comparado com casos disponíveis na literatura,
pois os valores absolutos serão sempre algo diferentes uma vez que os resultados produzidos pelo
código tratam-se de soluções invíscidas. Tentou-se explorar resultados provenientes de várias fontes e
sob diversas condições, de modo a abranger situações típicas de efeito solo.
As possíveis definições de ⁄ são apresentadas na Figura 48. A primeira hipótese é a de ser a
distãncia do ponto mais inferior do perfil à parede. A segunda possibilidade é a de ser a distância do
bordo de fuga à parede.
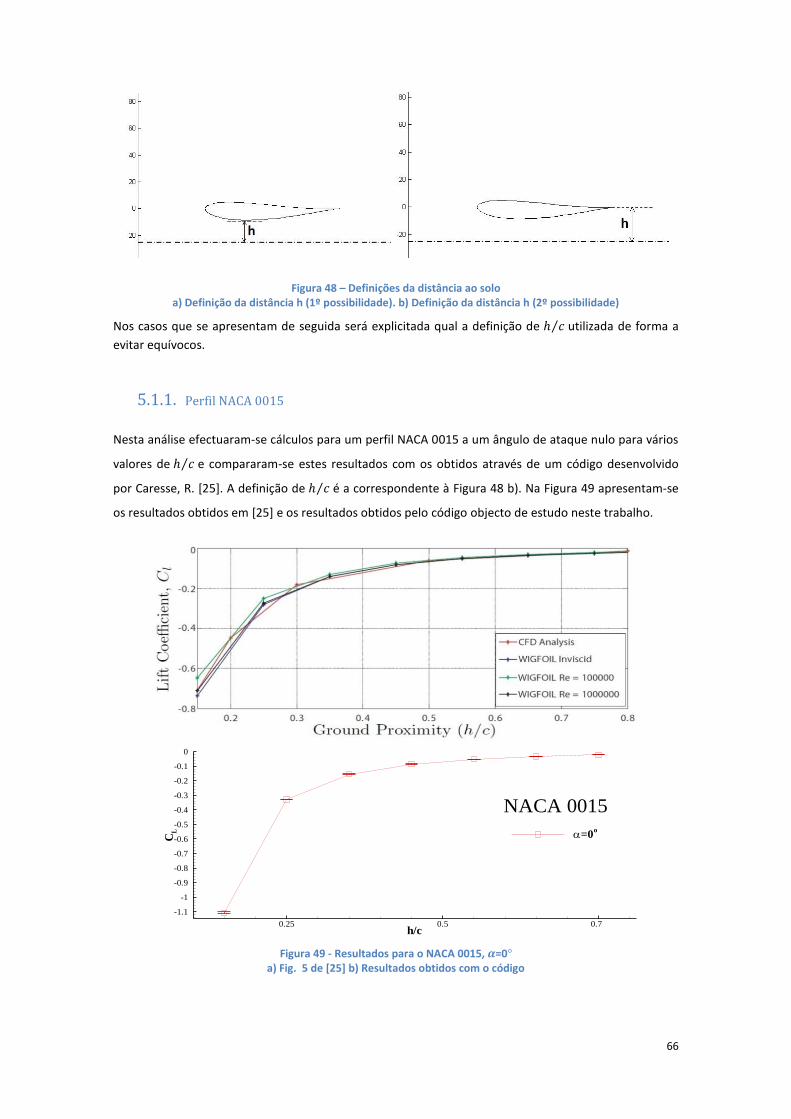
66
Figura 48 – Definições da distância ao solo a) Definição da distância h (1º possibilidade). b) Definição da distância h (2º possibilidade)
Nos casos que se apresentam de seguida será explicitada qual a definição de ⁄ utilizada de forma a
evitar equívocos.
5.1.1. Perfil NACA 0015
Nesta análise efectuaram-se cálculos para um perfil NACA 0015 a um ângulo de ataque nulo para vários
valores de ⁄ e compararam-se estes resultados com os obtidos através de um código desenvolvido
por Caresse, R. [25]. A definição de ⁄ é a correspondente à Figura 48 b). Na Figura 49 apresentam-se
os resultados obtidos em [25] e os resultados obtidos pelo código objecto de estudo neste trabalho.
Figura 49 - Resultados para o NACA 0015, =0 a) Fig. 5 de [25] b) Resultados obtidos com o código
h/c
CL
0.25 0.5 0.7
-1.1
-1
-0.9
-0.8
-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
=0o
NACA 0015

67
Observa-se que há uma grande concordância dos resultados, embora haja uma diferença marginal entre
os (neste caso negativo), devendo-se tal às diferenças de método de cálculo utilizado. No entanto, as
curvas seguem a mesma tendência, cumprindo-se assim o objectivo desta análise.
5.1.2. Perfil NACA 4412
Outro dos perfis sujeito a análise foi o NACA 4412, tendo sido analisado a vários ângulos de ataque e a
diferentes distâncias ao solo de modo a se descobrirem as tendências de aumento ou diminuição do
coeficiente de sustentação, tendo-se depois comparado estes resultados com os obtidos por Rong W.
[24], obtidos através de um código de escoamento viscoso RANS. Assim, na Figura 50 apresentam-se
ambos os gráficos, primeiro os obtidos em [24] e de seguida os obtidos com o código desenvolvido. A
definição de ⁄ é a correspondente à Figura 48 a).
Figura 50 - Resultados para o NACA 4412 a) Fig. 6 de [24] b) Resultados obtidos com o programa
h/c
CL
0 0.25 0.5 0.75 10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
=0o
=2o
=4o
=6o
=8o
NACA 4412
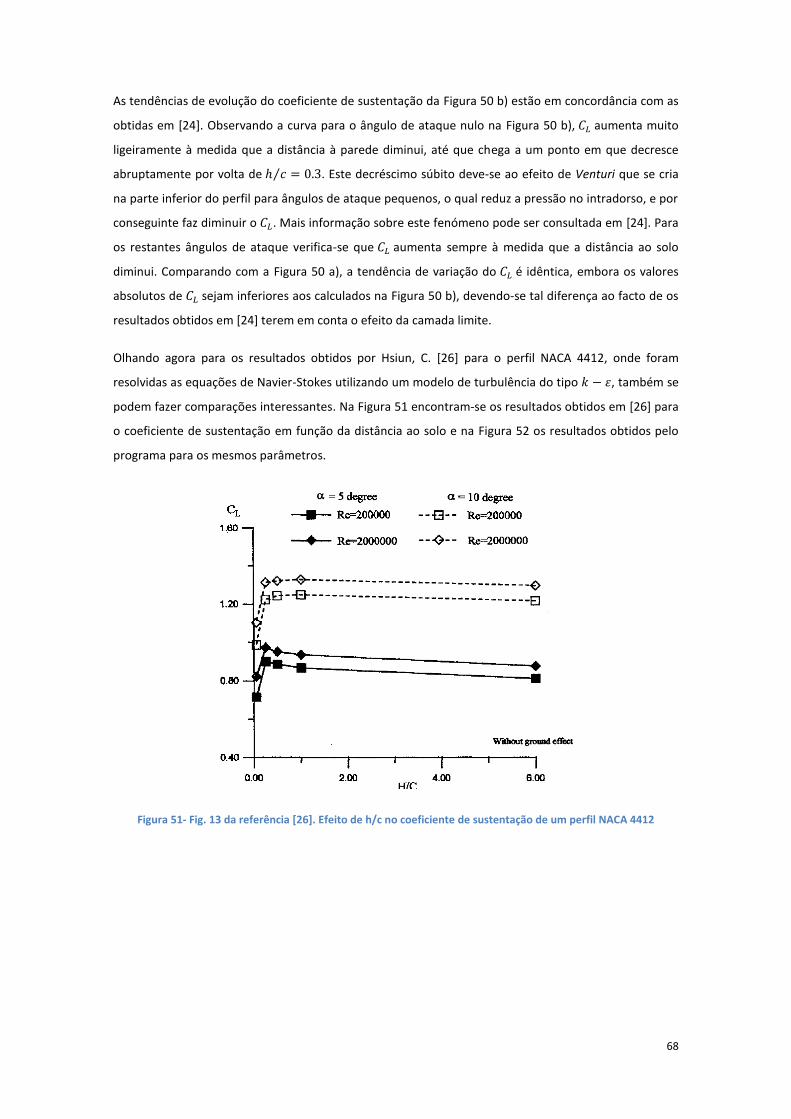
68
As tendências de evolução do coeficiente de sustentação da Figura 50 b) estão em concordância com as
obtidas em [24]. Observando a curva para o ângulo de ataque nulo na Figura 50 b), aumenta muito
ligeiramente à medida que a distância à parede diminui, até que chega a um ponto em que decresce
abruptamente por volta de ⁄ . Este decréscimo súbito deve-se ao efeito de Venturi que se cria
na parte inferior do perfil para ângulos de ataque pequenos, o qual reduz a pressão no intradorso, e por
conseguinte faz diminuir o . Mais informação sobre este fenómeno pode ser consultada em [24]. Para
os restantes ângulos de ataque verifica-se que aumenta sempre à medida que a distância ao solo
diminui. Comparando com a Figura 50 a), a tendência de variação do é idêntica, embora os valores
absolutos de sejam inferiores aos calculados na Figura 50 b), devendo-se tal diferença ao facto de os
resultados obtidos em [24] terem em conta o efeito da camada limite.
Olhando agora para os resultados obtidos por Hsiun, C. [26] para o perfil NACA 4412, onde foram
resolvidas as equações de Navier-Stokes utilizando um modelo de turbulência do tipo , também se
podem fazer comparações interessantes. Na Figura 51 encontram-se os resultados obtidos em [26] para
o coeficiente de sustentação em função da distância ao solo e na Figura 52 os resultados obtidos pelo
programa para os mesmos parâmetros.
Figura 51- Fig. 13 da referência [26]. Efeito de h/c no coeficiente de sustentação de um perfil NACA 4412
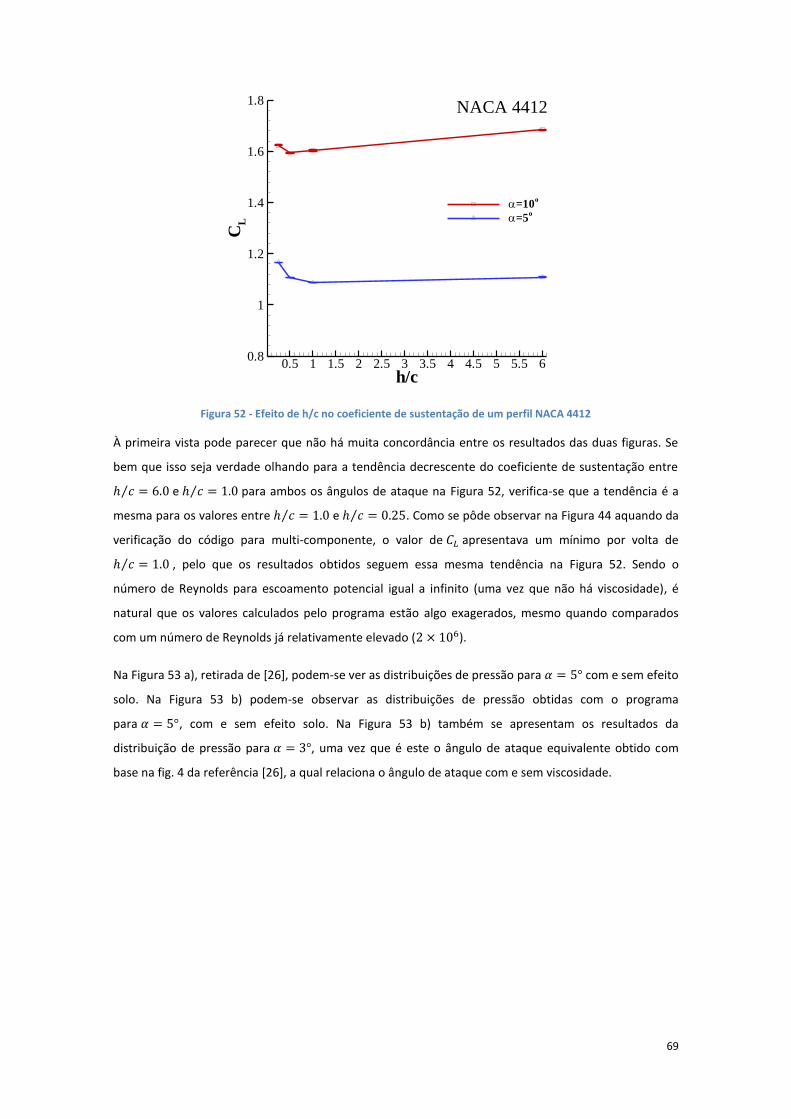
69
Figura 52 - Efeito de h/c no coeficiente de sustentação de um perfil NACA 4412
À primeira vista pode parecer que não há muita concordância entre os resultados das duas figuras. Se
bem que isso seja verdade olhando para a tendência decrescente do coeficiente de sustentação entre
⁄ e ⁄ para ambos os ângulos de ataque na Figura 52, verifica-se que a tendência é a
mesma para os valores entre ⁄ e ⁄ . Como se pôde observar na Figura 44 aquando da
verificação do código para multi-componente, o valor de apresentava um mínimo por volta de
⁄ , pelo que os resultados obtidos seguem essa mesma tendência na Figura 52. Sendo o
número de Reynolds para escoamento potencial igual a infinito (uma vez que não há viscosidade), é
natural que os valores calculados pelo programa estão algo exagerados, mesmo quando comparados
com um número de Reynolds já relativamente elevado ( ).
Na Figura 53 a), retirada de [26], podem-se ver as distribuições de pressão para com e sem efeito
solo. Na Figura 53 b) podem-se observar as distribuições de pressão obtidas com o programa
para , com e sem efeito solo. Na Figura 53 b) também se apresentam os resultados da
distribuição de pressão para , uma vez que é este o ângulo de ataque equivalente obtido com
base na fig. 4 da referência [26], a qual relaciona o ângulo de ataque com e sem viscosidade.
h/c
CL
0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 5.5 60.8
1
1.2
1.4
1.6
1.8
=10o
=5o
NACA 4412
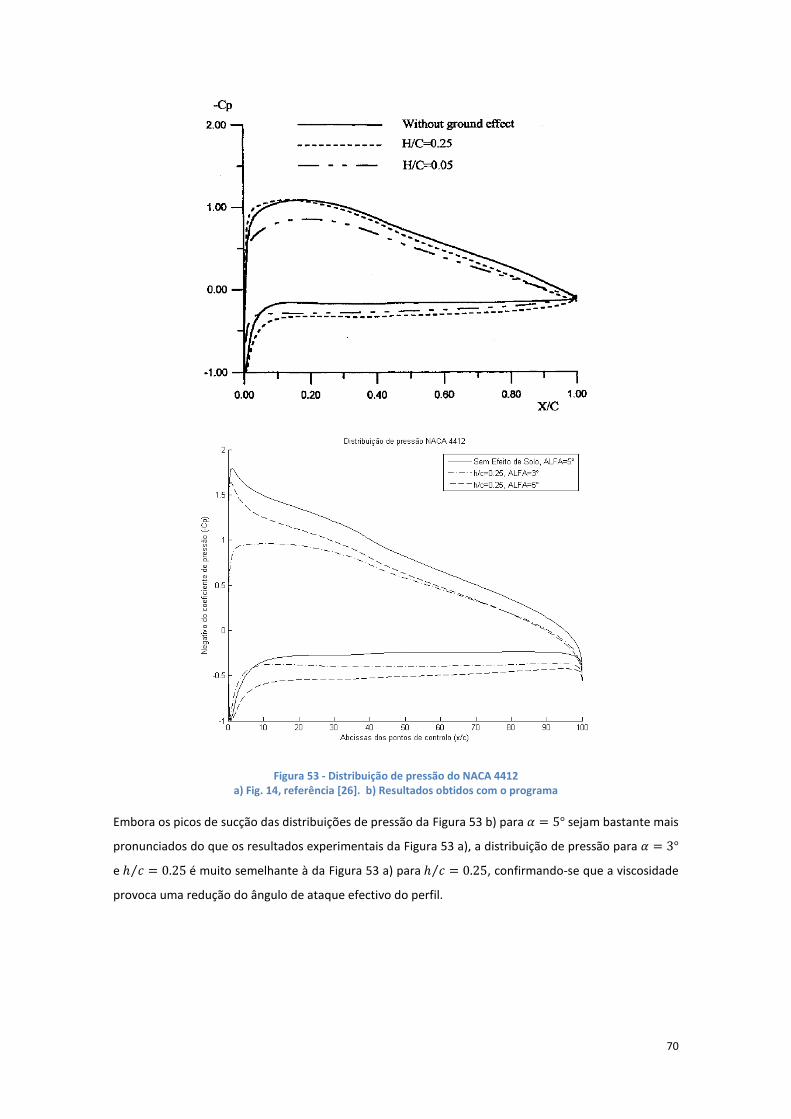
70
Figura 53 - Distribuição de pressão do NACA 4412 a) Fig. 14, referência [26]. b) Resultados obtidos com o programa
Embora os picos de sucção das distribuições de pressão da Figura 53 b) para sejam bastante mais
pronunciados do que os resultados experimentais da Figura 53 a), a distribuição de pressão para
e ⁄ é muito semelhante à da Figura 53 a) para ⁄ , confirmando-se que a viscosidade
provoca uma redução do ângulo de ataque efectivo do perfil.
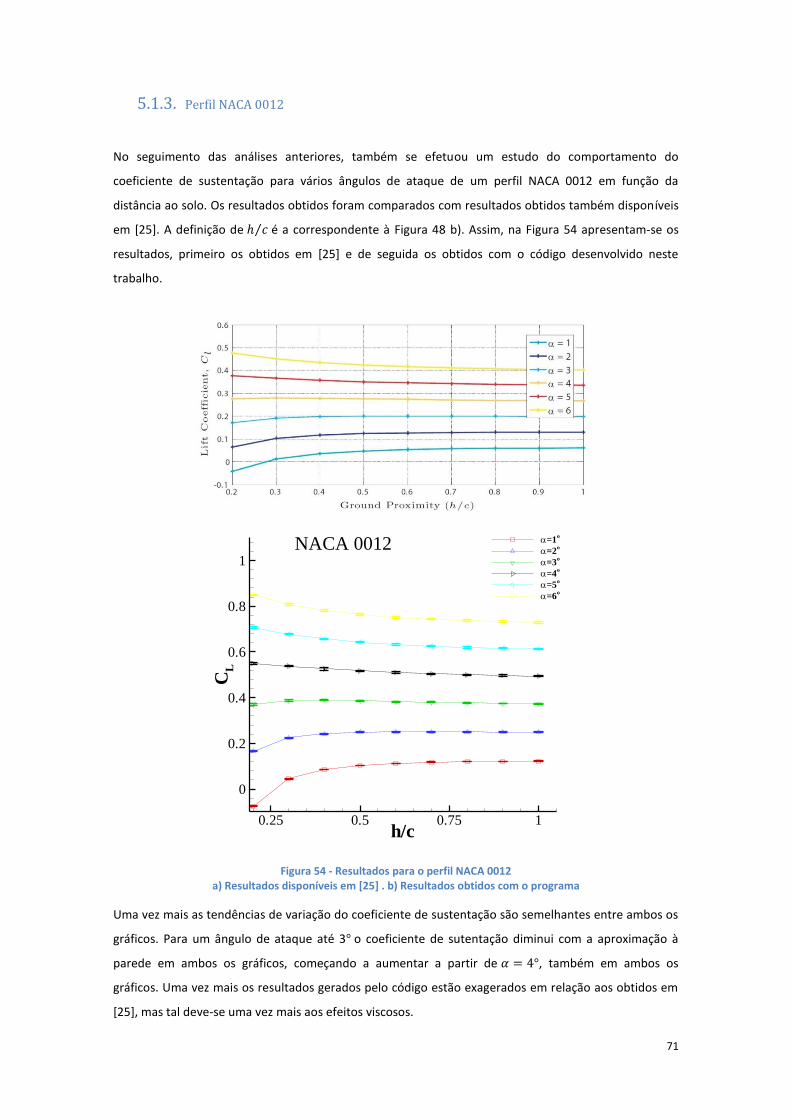
71
5.1.3. Perfil NACA 0012
No seguimento das análises anteriores, também se efetuou um estudo do comportamento do
coeficiente de sustentação para vários ângulos de ataque de um perfil NACA 0012 em função da
distância ao solo. Os resultados obtidos foram comparados com resultados obtidos também disponíveis
em [25]. A definição de ⁄ é a correspondente à Figura 48 b). Assim, na Figura 54 apresentam-se os
resultados, primeiro os obtidos em [25] e de seguida os obtidos com o código desenvolvido neste
trabalho.
Figura 54 - Resultados para o perfil NACA 0012 a) Resultados disponíveis em [25] . b) Resultados obtidos com o programa
Uma vez mais as tendências de variação do coeficiente de sustentação são semelhantes entre ambos os
gráficos. Para um ângulo de ataque até 3 o coeficiente de sutentação diminui com a aproximação à
parede em ambos os gráficos, começando a aumentar a partir de , também em ambos os
gráficos. Uma vez mais os resultados gerados pelo código estão exagerados em relação aos obtidos em
[25], mas tal deve-se uma vez mais aos efeitos viscosos.
h/c
CL
0.25 0.5 0.75 1
0
0.2
0.4
0.6
0.8
1
=1o
=2o
=3o
=4o
=5o
=6o
NACA 0012
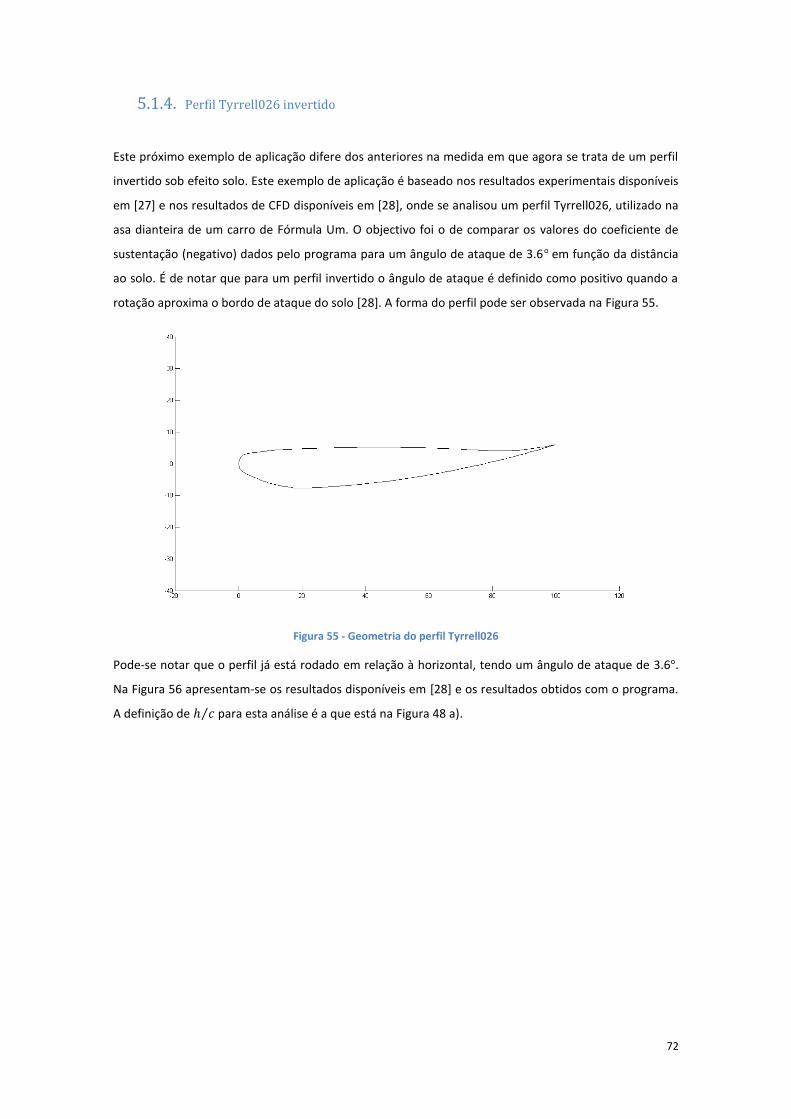
72
5.1.4. Perfil Tyrrell026 invertido
Este próximo exemplo de aplicação difere dos anteriores na medida em que agora se trata de um perfil
invertido sob efeito solo. Este exemplo de aplicação é baseado nos resultados experimentais disponíveis
em [27] e nos resultados de CFD disponíveis em [28], onde se analisou um perfil Tyrrell026, utilizado na
asa dianteira de um carro de Fórmula Um. O objectivo foi o de comparar os valores do coeficiente de
sustentação (negativo) dados pelo programa para um ângulo de ataque de 3.6 em função da distância
ao solo. É de notar que para um perfil invertido o ângulo de ataque é definido como positivo quando a
rotação aproxima o bordo de ataque do solo [28]. A forma do perfil pode ser observada na Figura 55.
Figura 55 - Geometria do perfil Tyrrell026
Pode-se notar que o perfil já está rodado em relação à horizontal, tendo um ângulo de ataque de 3.6 .
Na Figura 56 apresentam-se os resultados disponíveis em [28] e os resultados obtidos com o programa.
A definição de ⁄ para esta análise é a que está na Figura 48 a).
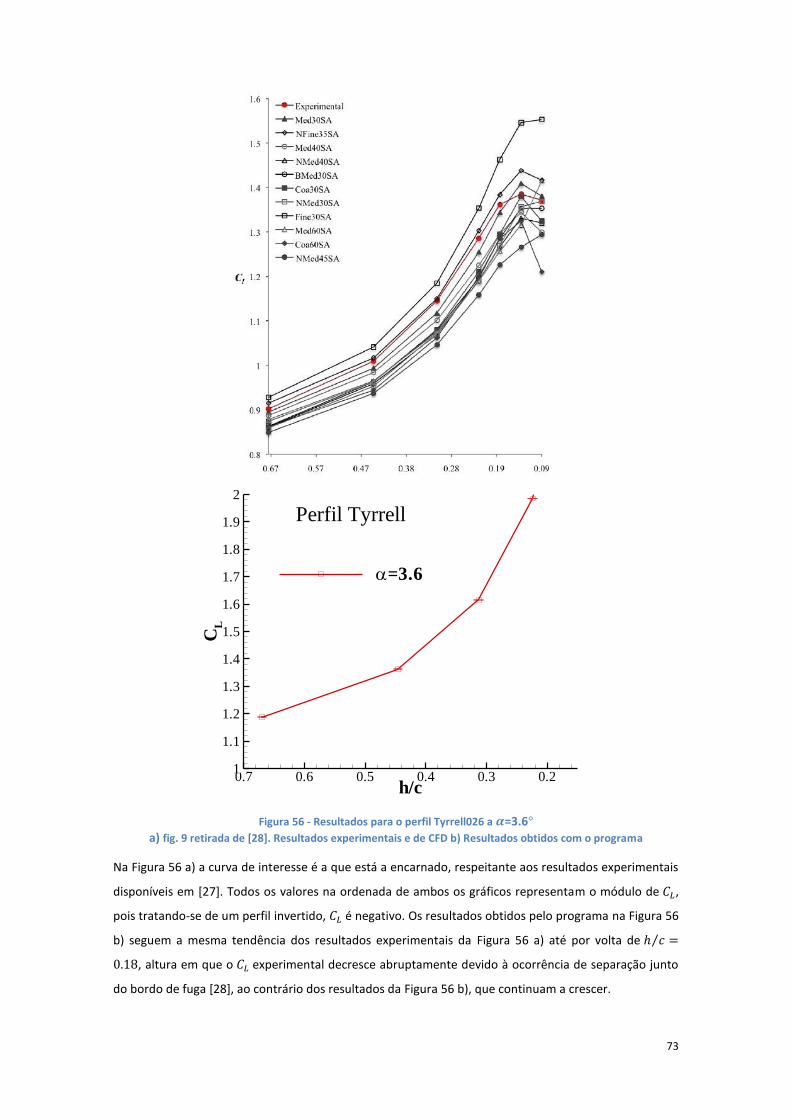
73
Figura 56 - Resultados para o perfil Tyrrell026 a =3.6 a) fig. 9 retirada de [28]. Resultados experimentais e de CFD b) Resultados obtidos com o programa
Na Figura 56 a) a curva de interesse é a que está a encarnado, respeitante aos resultados experimentais
disponíveis em [27]. Todos os valores na ordenada de ambos os gráficos representam o módulo de ,
pois tratando-se de um perfil invertido, é negativo. Os resultados obtidos pelo programa na Figura 56
b) seguem a mesma tendência dos resultados experimentais da Figura 56 a) até por volta de ⁄
, altura em que o experimental decresce abruptamente devido à ocorrência de separação junto
do bordo de fuga [28], ao contrário dos resultados da Figura 56 b), que continuam a crescer.
h/c
CL
0.20.30.40.50.60.71
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
=3.6
Perfil Tyrrell
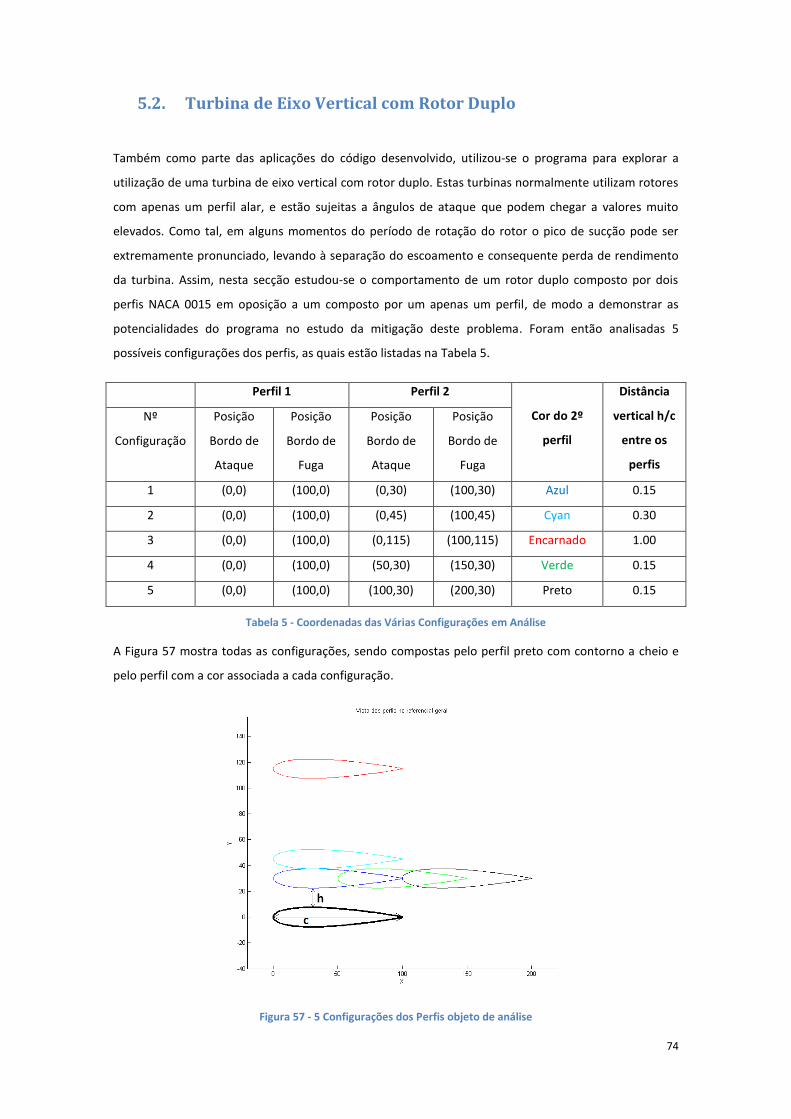
74
5.2. Turbina de Eixo Vertical com Rotor Duplo
Também como parte das aplicações do código desenvolvido, utilizou-se o programa para explorar a
utilização de uma turbina de eixo vertical com rotor duplo. Estas turbinas normalmente utilizam rotores
com apenas um perfil alar, e estão sujeitas a ângulos de ataque que podem chegar a valores muito
elevados. Como tal, em alguns momentos do período de rotação do rotor o pico de sucção pode ser
extremamente pronunciado, levando à separação do escoamento e consequente perda de rendimento
da turbina. Assim, nesta secção estudou-se o comportamento de um rotor duplo composto por dois
perfis NACA 0015 em oposição a um composto por um apenas um perfil, de modo a demonstrar as
potencialidades do programa no estudo da mitigação deste problema. Foram então analisadas 5
possíveis configurações dos perfis, as quais estão listadas na Tabela 5.
Perfil 1 Perfil 2
Cor do 2º
perfil
Distância
vertical h/c
entre os
perfis
Nº
Configuração
Posição
Bordo de
Ataque
Posição
Bordo de
Fuga
Posição
Bordo de
Ataque
Posição
Bordo de
Fuga
1 (0,0) (100,0) (0,30) (100,30) Azul 0.15
2 (0,0) (100,0) (0,45) (100,45) Cyan 0.30
3 (0,0) (100,0) (0,115) (100,115) Encarnado 1.00
4 (0,0) (100,0) (50,30) (150,30) Verde 0.15
5 (0,0) (100,0) (100,30) (200,30) Preto 0.15
Tabela 5 - Coordenadas das Várias Configurações em Análise
A Figura 57 mostra todas as configurações, sendo compostas pelo perfil preto com contorno a cheio e
pelo perfil com a cor associada a cada configuração.
Figura 57 - 5 Configurações dos Perfis objeto de análise
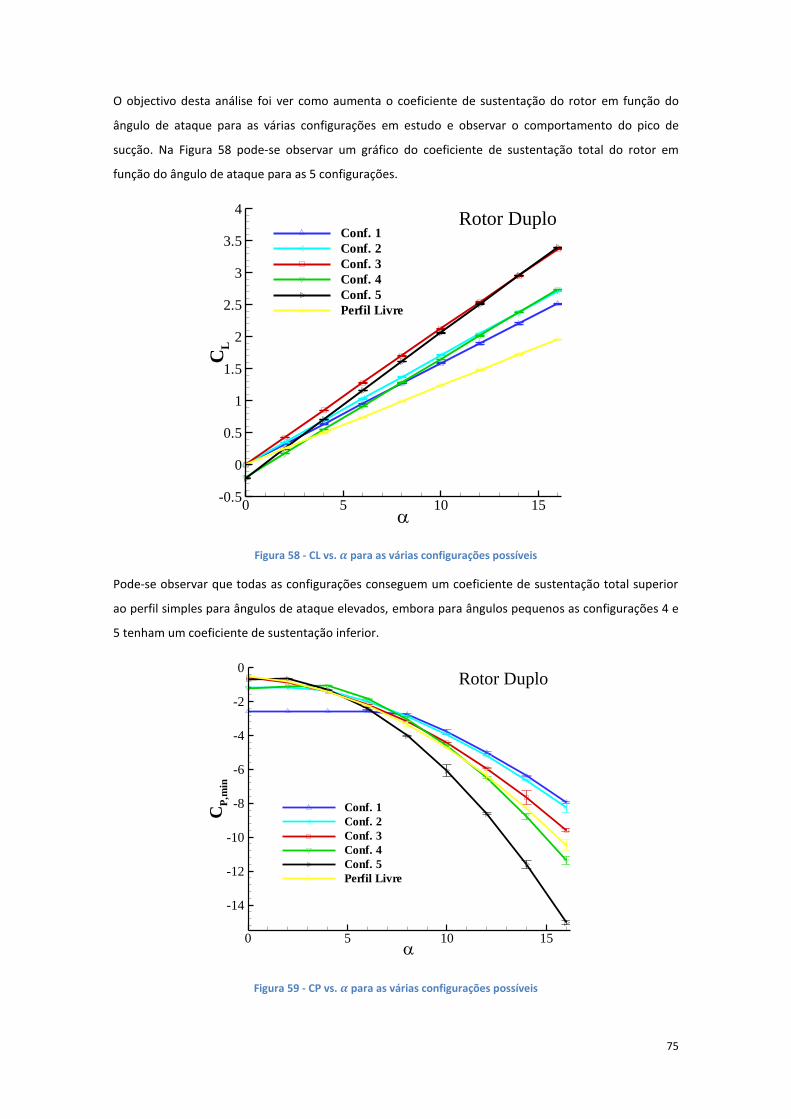
75
O objectivo desta análise foi ver como aumenta o coeficiente de sustentação do rotor em função do
ângulo de ataque para as várias configurações em estudo e observar o comportamento do pico de
sucção. Na Figura 58 pode-se observar um gráfico do coeficiente de sustentação total do rotor em
função do ângulo de ataque para as 5 configurações.
Figura 58 - CL vs. para as várias configurações possíveis
Pode-se observar que todas as configurações conseguem um coeficiente de sustentação total superior
ao perfil simples para ângulos de ataque elevados, embora para ângulos pequenos as configurações 4 e
5 tenham um coeficiente de sustentação inferior.
Figura 59 - CP vs. para as várias configurações possíveis
CL
0 5 10 15-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Conf. 1
Conf. 2
Conf. 3
Conf. 4
Conf. 5
Perfil Livre
Rotor Duplo
CP
,min
0 5 10 15
-14
-12
-10
-8
-6
-4
-2
0
Conf. 1
Conf. 2
Conf. 3
Conf. 4
Conf. 5
Perfil Livre
Rotor Duplo
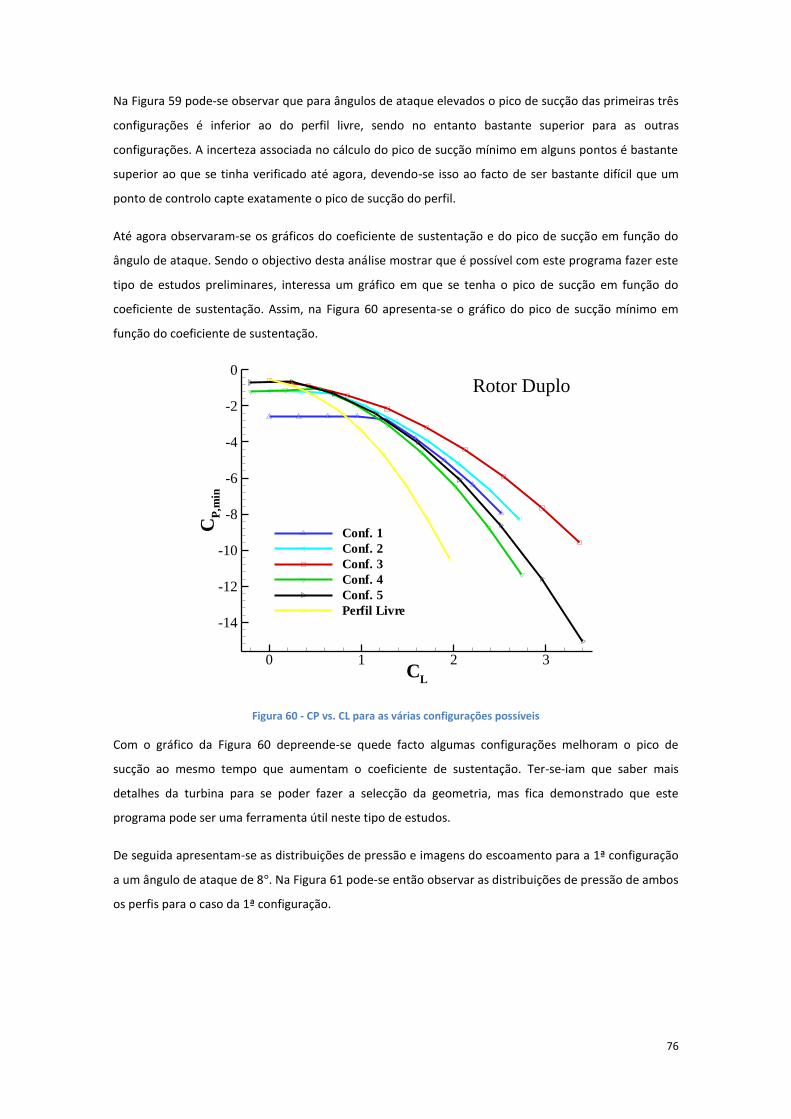
76
Na Figura 59 pode-se observar que para ângulos de ataque elevados o pico de sucção das primeiras três
configurações é inferior ao do perfil livre, sendo no entanto bastante superior para as outras
configurações. A incerteza associada no cálculo do pico de sucção mínimo em alguns pontos é bastante
superior ao que se tinha verificado até agora, devendo-se isso ao facto de ser bastante difícil que um
ponto de controlo capte exatamente o pico de sucção do perfil.
Até agora observaram-se os gráficos do coeficiente de sustentação e do pico de sucção em função do
ângulo de ataque. Sendo o objectivo desta análise mostrar que é possível com este programa fazer este
tipo de estudos preliminares, interessa um gráfico em que se tenha o pico de sucção em função do
coeficiente de sustentação. Assim, na Figura 60 apresenta-se o gráfico do pico de sucção mínimo em
função do coeficiente de sustentação.
Figura 60 - CP vs. CL para as várias configurações possíveis
Com o gráfico da Figura 60 depreende-se quede facto algumas configurações melhoram o pico de
sucção ao mesmo tempo que aumentam o coeficiente de sustentação. Ter-se-iam que saber mais
detalhes da turbina para se poder fazer a selecção da geometria, mas fica demonstrado que este
programa pode ser uma ferramenta útil neste tipo de estudos.
De seguida apresentam-se as distribuições de pressão e imagens do escoamento para a 1ª configuração
a um ângulo de ataque de 8 . Na Figura 61 pode-se então observar as distribuições de pressão de ambos
os perfis para o caso da 1ª configuração.
CL
CP
,min
0 1 2 3
-14
-12
-10
-8
-6
-4
-2
0
Conf. 1
Conf. 2
Conf. 3
Conf. 4
Conf. 5
Perfil Livre
Rotor Duplo
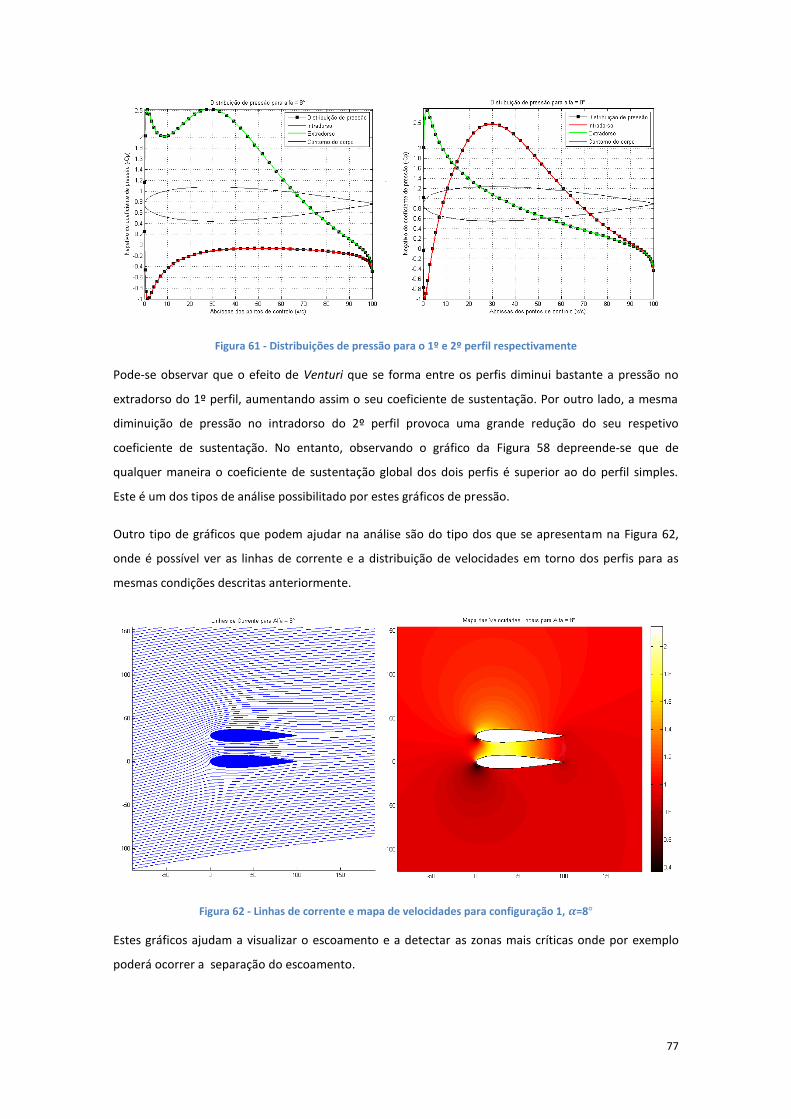
77
Figura 61 - Distribuições de pressão para o 1º e 2º perfil respectivamente
Pode-se observar que o efeito de Venturi que se forma entre os perfis diminui bastante a pressão no
extradorso do 1º perfil, aumentando assim o seu coeficiente de sustentação. Por outro lado, a mesma
diminuição de pressão no intradorso do 2º perfil provoca uma grande redução do seu respetivo
coeficiente de sustentação. No entanto, observando o gráfico da Figura 58 depreende-se que de
qualquer maneira o coeficiente de sustentação global dos dois perfis é superior ao do perfil simples.
Este é um dos tipos de análise possibilitado por estes gráficos de pressão.
Outro tipo de gráficos que podem ajudar na análise são do tipo dos que se apresentam na Figura 62,
onde é possível ver as linhas de corrente e a distribuição de velocidades em torno dos perfis para as
mesmas condições descritas anteriormente.
Figura 62 - Linhas de corrente e mapa de velocidades para configuração 1, =8
Estes gráficos ajudam a visualizar o escoamento e a detectar as zonas mais críticas onde por exemplo
poderá ocorrer a separação do escoamento.

78
Embora se possam efectuar cálculos com códigos que incluam mais detalhes do escoamento, fica
demonstrado que este código é muito útil para se estudar este tipo de situações, podendo inclusive ser
incorporado num algoritmo genético de optimização que permitiria explorar inúmeras configurações a
vários ângulos de ataque.

79
6. Conclusões
Neste trabalho implementou-se um método de painel 2D em MATLAB para resolver escoamentos
potenciais em redor de vários corpos sustentadores. Efectuou-se uma verificação do código para perfis
simples, tendo-se concluído que o erro numérico converge sempre para zero para um número de
painéis grande, embora em alguns dos casos testados se tivessem de efectuar mais cálculos utilizando
mais painéis para que se chegasse à zona de convergência assimptótica. De igual modo, também se
efectuou uma verificação para perfis sob efeito solo, tendo-se estimado a incerteza associada ao cálculo
e demonstrado que o resultado do coeficiente de sustentação tende para a solução do perfil simples à
medida que a distância à parede aumenta, comportando-se assim tal como o esperado. Por comparação
dos resultados obtidos com o código desenvolvido com resultados de perfis sob efeito solo disponíveis
na literatura concluiu-se que o código desenvolvido produz as mesmas tendências de variação do
coeficiente de sustentação e da distribuição de pressão, ainda que os valores absolutos estivessem por
vezes algo sobrestimados. Ao se ter incluindo em todos os cálculos uma barra da incerteza estimada,
concluiu-se também que esta era sempre várias ordens de grandeza inferior às variações dos resultados
advindas da variação dos parâmetros de cálculo.
Conclui-se assim que o código desenvolvido pode ser uma ferramenta extremamente útil para estudos
preliminares qualitativos de várias situações em que se tenha mais de um perfil e para aplicações de
optimização de geometrias e orientações relativas entre perfis, uma vez que é extremamente rápido
quando comparado com outros códigos de CFD, é fiável pois produz resultados qualitativos correctos e
é versátil porque pode efectuar o cálculo para qualquer número de corpos sustendadores.
80
Bibliografia
[1] Katz, J. e Plotkin, A. Low-Speed Aerodynamics. Singapore. McGraw Hill, 1991. ISBN 0-07-050446-6.
[2] Hess, J.L. e Smith, A.M.O. Calculation of Potential Flow About Arbitrary Bodies. New York, Pegamon
Presser, 1966.
[3] Hess, J.L. Review of the Source Panel Technique for Flow Computation. Atlanta, Georgia, Douglas
Paper, 1986.
[4] Katz, J. Aerodynamic Model for Wing-Generated Down Force on Open-Wheel-Racing-Car
Configurations. SAE Publication 860218, 1986.
[5] Katz, J. Calculation of the Aerodynamic Forces on Automotive Lifting Surfaces. ASME J. Fluids Eng.,
107, pp. 438–443, 1985.
[6] Katz, J. Considerations Pertinent to Race-Car Wing Design. Loughborough University Conference on
Vehicle Aerodynamics, pp. 23.1–23.7, 1994.
[7] Katz, J. High-Lift Wing Design for Race-Car Applications. SAE Publication 951976, 1995.
[8] Knowles, K., Donahue, D. T. e V., Finnis M. A Study of Wings in Ground Effect. Loughborough
University Conference on Vehicle Aerodynamics, Vol. 22, pp. 1–13, 1994.
[9] Zhang, X., Toet, W. e Zerihan, J. Ground Effect Aerodynamics. Applied Mechanics Reviews, January
2006, Vol. 59 / 49.
[10] Sun, S., Thannipat, P. e Winarto, H. Airfoil Shape Optimization for a Formula One Car Front Wing
Using Multi-Objective Genetic Algorithm. American Institute of Aeronautics and Astronautics.
[11] Wickramasinghe, U., Carrese, R e Li, Xiaodong. Designing Airfoils using a Reference Point based
Evolutionary Many-objective Particle Swarm Optimization Algorithm. Barcelona, Spain, World Congress
on Computational Intelligence, July, 18-23, 2010.
[12] Eça, L. e Falcão de Campos, J. Analysis of Two-Dimensional Foils Using a Viscous-Inviscid Interaction
Method. Int. Shipbuilding Progress, Vol. 40, no. 422, pp.137-163, 1993. ISSN 0020-868X.
[13] Moran, J. An Introduction to Theoretical and Computational Aerodynamics. Mineola, New York :
Dover Publications, 1984. ISBN 0-486-42879.
[14] Mason, B. Applied Computational Aerodynamics.
http://www.dept.aoe.vt.edu/~mason/Mason_f/CAtxtTop.html.
[15] Anton, H. e Rorres, C. Elementary Linear Algebra With Applications. Wiley & Sons, 2005.
[16] Brederode, Vasco de. Fundamentos de Aerodinâmica Incompressível. Lisboa, Edição de Autor, 1997.
[17] Pina, Heitor. Textos de Matemática Computacional. Faculdade de Engenharia da Universidade do
Porto, 2008.
[18] Hess, J.L. The Use of Higher-Order Surface Singularity Distributions to Obtain Improved Potential
Flow Solutions for Two-Dimensional Lifting Airfoils. Comp. Meth. Appl. Mech. Engng., Vol. 5, pp. 11-35,
1975.
81
[19] Falcão, António. Mecânica dos Fluidos II: Escoamento de Fluidos Perfeitos. AEIST, 2005.
[20] Eça, L., Vaz, G. e Falcão de Campos, J. Verification Study of Low and Higher-Order Potential Based
Panel Methods for 2D Foils. American Institute of Aeronautics and Astronautics, no. 2002-3112, 2002.
[21] Eça, L., Vaz, G. e Falcão de Campos, J.A.C. Verification of Calculations of the Potential Flow Around
Two-Dimensional Foils. American Institute of Aeronautics and Astronautics, Vol. 42, No. 12, 2004.
[22] Eça, L. Verificação de Códigos e de Cálculos em Mecância dos Fluidos Computacional. Conferência
Nacional de Métodos Numéricos em Mecânica dos Fluidos e Termodinâmica, 2006.
[23] Sheldahl, R. E. e Klimas, P. C. Aerodynamic Characteristics of Seven Airfoil Sections Through 180
Degrees Angle of Attack for Use in Aerodynamic Analysis of Vertical Axis Wind Turbines. Sandia National
Laboratories, Albuquerque, New Mexico, SAND80-2114, 1981.
[24] Rong, W., Feng, Liang e L., Wenxiang. Computational Analysis on Aerodynamics of The Airfoil in
Ground Effect. Xiamen, China : International Conference on Computer Science and Electronics
Engineering, 2012.
[25] Carrese, R. e Winarto, H. Parametric Study of Airfoil Proximity to the ground. Bundoora, Australia,
American Institute of Aeronautics and Astronautics.
http://www.academia.edu/1149892/Parametric_Study_of_Airfoil_Proximity_to_the_Ground
[26] Hsiun, C. e Chen, C. Aerodynamic Characteristics of a Two-Dimensional Airfoil with Ground Effect.
Journal of Aircraft, Vol. 3, No. 2, 1996.
[27] Zerihan, J. e Zhang, X. Aerodynamics of a Single-Element in Ground Effect. Journal of Aircraft, Vol.
37, Nº 6,2000, pp. 1058-1064.
[28] Genua, E. A CFD Investigation into Ground Effect Aerodynamics. Master Thesis, Delft University of
Technology, 2009.





























