Embed Size (px)
Citation preview

Mixed Criticality in Safety-Critical Systems
Prof. Dr. Jian-Jia Chen
LS 12, TU Dortmund
18, July, 2016
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 25

Motivation
• today’s embeddedsystems use complexnetworks
• hundreds offunctions
• thousands of tasks• 50+ ECUs
(electronic controlunits)
• networked control• many suppliers• heterogeneous
• networks are anefficient platform forsystems integration
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 2 / 25

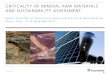
Example: Mercedes-Benz E-Class
source: T. Bone, Daimler
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 3 / 25

Safety Challenge
• Embedded systems are increasingly used to• implement advanced system features• improve safety
• In such cases, the embedded system inherits the safety anddependability requirements of the system function
• safety related embedded systems
• Such functions are no longer simple• They are often distributed
• Example: automotive electronics• brake system• camera-based object recognition and tracking
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 4 / 25

Safety Standards
• The design of safety-related systems is driven by safetystandards
• Safety standards contain• rules and regulations for all design system• recommended guidelines for the development process
• Safety standards cover all stages of the development process• specification• design• implementation• test• maintenance
• Objective of safety related design• avoid unacceptable risk• assure functional safety
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 5 / 25

Functional Safety
• Safety: Freedom from unacceptable risk of physical injury orof damage to the health of people
• Functional safety: refers to the safety of system functions• A safe system can handle faults without causing severe
functional failures
• Risk:• frequency of hazardous events• severity of hazardous events
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 6 / 25

Embedded Systems Functional Failures
• Embedded system (ES) functional failures are not necessarilycatastrophic
• Effect depends on the importance of the failing function forthe overall system
• function criticality
• Criticality depends on the overall system functionality• fail safe (ES is not critical but important for quality):
if the ES function fails there is a safe function backup or a safesystem state that avoids severe consequences (mechanicalsteering, hydraulic brake, emergency stop)
• fail operational (ES function is critical, but possibly only needsa specific function):the function continues based on system redundancy or turns toan error mode with reduced functionality (gracefuldegradation)
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 7 / 25

Safety and Time Criticality
Many safety critical systems have hard deadlines
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 8 / 25

Embedded System Functional Failures and Timing
• ES functions have different criticality• depending on the overall system
• where timing is specified, it becomes part of the functioncriticality
• ES timing failures are ES functional failures
• switching to error modes is time critical• switching needs hard deadlines to guarantee overall system
function
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 9 / 25

IEC 61508 - Overview
• Functional Safety of Electrical/Electronic/ProgrammableElectronic Safety-related Systems
• basic functional safety standard applicable to industry• generic standard for safety-related systems
• Metric: “Safety Integrity Level” - SIL• defines four degrees of safety: from 1 (lowest) to 4 (highest)• specification of maximum failure rates for each level
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 10 / 25

Merging Functions with Different Criticality Levels
• Integration on one platform leads to systems with applicationsof different safety requirements
• strict separation too expensive• mixed (safety) criticality systems
• Mutual dependency via platform and sensors/actuatorsrequires safety concept and qualification/certification for allfunctions
• Safety is highly relevant aspect in embedded systemsintegration
• Sharing resources is hard to avoide in cost efficient systems• shared (open) network• shared on-chip network, shared memories, etc.
• Is it possible to integrate several subsystems and avoidinterference?
• This would be important for mixed criticality systems:non-critical parts are less verified and not designed for worstcase
• It would reduce verification/certification/integration cost
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 11 / 25

Mixed Criticality Task Scheduling
Given a task τi , with
• criticality level Li (Let’s assume that the higher number is morecritical)
• Defense avionics: 2 (3) criticalities, says safety-critical;mission-critical; non-critical
• Civilian aviation (DO-178B): 5 criticalities, says catastrophic;hazardous; major; minor; no effect
• Automotive systems (ISO 26262): 4 criticalities
• Worst-case execution time function Ci (1),Ci (2), . . .
• A high criticality task may be subject to pessimistic staticanalysis
• A medium criticality task may be subject to worst-casemeasurement, plus a safety margin
• A low criticality task may be assessed by simple limitedmeasurement (worst seen in a small number of runs)
• We can assume that Ci (j) ≥ Ci (j + 1)
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 12 / 25

Mixed Criticality Task Scheduling (cont.)
Let’s consider how to verify the schedulability by using theknowledge we learned in the course.
• Consider a set T of periodic tasks with implicit deadlines
• Consider two criticality levels:• HI: high criticality (Ci (2) will be considered)• LO: low criticality (Ci (1) will be considered)
• A task τi is either specified as a HI task (Li = 2) or a LO task(Li = 1)
• Let HI be the set of HI tasks• Let LO be the set of LO tasks
• When the system is in HI, all the HI tasks should be feasiblyscheduled by considering that Ci (2) is the WCET.
• When the system is in LO, all the tasks should be feasiblyscheduled by considering that Ci (1) is the WCET.
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 13 / 25

Criticality Monotonic
• All HI tasks have priorities higher than all LO tasks• Rate monotonic within each class
• All HI tasks τi ∈ HI use Ci (2)
• All LO tasks τi ∈ LO use Ci (1)
What’s the schedulability condition for such a mixed-criticalityscheduling?
∃t ≤ Ti Ci (Li ) +∑
τj∈hp(τi )
⌈t
Tj
⌉Cj(Lj) ≤ t ∀τi
where hp(τi ) is the set of tasks with higher priority than τi .
Quiz: Is Criticality Monotonic the best strategy?
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 14 / 25

Intermingled Priorities
Priorities of HI and LO are intermingled
• When analysing HI tasks, HI tasks use Ci (2), but LO tasksuse Ci (1)
• At run-time, tasks τi in LO must be prevented from executingfor more than Ci (1)
• When analysing LO tasks, all tasks use Ci (LO).
• Disadvantage: execution times must be monitored
Let’s first assume hp(τi ) is given. What’s the schedulabilitycondition for such a mixed-criticality scheduling?
∃t ≤ Ti Ci (Li ) +∑
τj∈hp(τi )
⌈t
Tj
⌉Cj(min{Lj , Li}) ≤ t ∀τi
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 15 / 25

Deciding Priority Levels
Use Audsley’s algorithm (assume N tasks)
• Let LO have ` tasks and HI have h tasks
• Order all HI tasks by rate monotonic (1,h)
• Order all LO tasks by rate monotonic (1,`)
• Start at lowest priority (N)• Is LO(`) (lowest priority task in LO) schedulable at priority
level N? yes: ` := `− 1, and τ` is removed from LO• If no, is HI(h) (lowest priority task in HI) schedulable at
priority level N? yes h := h − 1, and τh is removed from HI• If no, → system unschedulable
• Repeat for N-1 etc.• Max 2N − 1 tests
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 16 / 25

Further Readings for References
• Alexandre Esper, Geoffrey Nelissen, Vincent Nelis, Eduardo Tovar: Howrealistic is the mixed-criticality real-time system model? RTNS 2015:139-148
• Sanjoy K. Baruah, Vincenzo Bonifaci, Gianlorenzo D’Angelo, Haohan Li,Alberto Marchetti-Spaccamela, Suzanne van der Ster, Leen Stougie:Preemptive Uniprocessor Scheduling of Mixed-Criticality Sporadic TaskSystems. J. ACM 62(2): 14 (2015)
• Georg von der Brggen, Kuan-Hsun Chen, Wen-Hung Huang and Jian-JiaChen: Systems with Dynamic Real-Time Guarantees in Uncertain andFaulty Execution Environments, in RTSS 2016
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 17 / 25

Uncertain and Faulty Execution Environments
• Uncertain / faulty behaviour imposed by physical environment
• Execution time of task instance enlarged, e.g. recoveryprocess after fault detection
• Abnormal mode: CAi > CN
i
• Assumption: faults happen rarely
• ⇒ Using CAi for scheduling analysis may be a huge over
estimation
• But: only possibility if all tasks are safety critical
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 18 / 25

Aborting Tasks
• Reality: not all tasks are safety critical ⇒ Deadline Miss(DM)) not that critical
• In theory and practical systems : abortion ”not so important”tasks Tsoft in abnormal mode
• ⇒ guarantees response time of more important tasks Thard
• Results of τi ∈ Tsoft may still be useful, even if they are a bitlate ⇒ aborting may not be such a good idea
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 19 / 25

Problems
• τi ∈ Thard must always meet the deadline
• We do not know when faults occur ⇒ only one priorityordering
• Aborting only works if all tasks in Tsoft have lower prioritythen the tasks in Thard
• τi ∈ Tsoft should still have good response time in normalmode ⇒ τi ∈ Tsoft should still meet there hard deadlines
• τi ∈ Tsoft should have bounded tardiness in abnormal mode
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 20 / 25

Sufficient Test
• TDA for all tasks in normal mode (TDA)
• TDA for all τi ∈ Thard in abnormal mode (TDA)• τi ∈ Tsoft with higher priority then the current task have to
be considered
• Bounded tardiness τi ∈ Tsoft ⇒ UAsum ≤ 1
Observation: as CAi > CN
i the schedulability test for τi ∈ Thard
only has to be checked in abnormal mode
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 21 / 25

RM is Not Optimal
• Rate Monotonic: Order according to the period
Normal mode:τ1 ∈ Tsoft = (2, 2 + ε, 6, 6)
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
τ2 ∈ Thard = (6, 8, 14, 14)
Abnormal mode:τ1 ∈ Tsoft = (2, 2 + ε, 6, 6)
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
τ2 ∈ Thard = (6, 8, 14, 14)
DM
Exchanging priority of τ1 and τ2:
• τ2 will meet its deadline• UA = 8
14 + 2+ε6 ≈ 0.58 + 0.34 = 0.92 < 1
⇒ bounded tardiness for τ1
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 22 / 25

SLPO is Not Optimal
• Service Level Priority Ordering: Order according to priority inabnormal mode
Normal mode:τ1 ∈ Thard = (6, 6 + ε, 12, 12)
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
τ2 ∈ Tsoft = (2, 2 + ε, 6, 6)
DM
Switching priority:τ2 ∈ Tsoft = (2, 2 + ε, 6, 6)
τ1 ∈ Thard = (6, 6 + ε, 12, 12)
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Abnormal mode:τ2 ∈ Tsoft = (2, 2 + ε, 6, 6)
τ1 ∈ Thard = (6, 6 + ε, 12, 12)
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 23 / 25

τi ∈ Thard can be Ordered in DM Order
τ1 ∈ Thard
τ2 ∈ Tsoft
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
τ3 ∈ Thard
τ1 ∈ Thard
τ2 ∈ Tsoft
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
τ3 ∈ Thard
τ1 ∈ Thard
-1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
τ2 ∈ Tsoft
τ3 ∈ Thard
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 24 / 25

Acknowledgment
The above slides are based on the slides provided from Prof. RolfErnst, Prof. Sanjoy Baruah, and Prof. Alan Burns.
Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 25 / 25