Embed Size (px)
Citation preview

Modeling and Complexity Reduction for
Interconnected Systems
Carolyn Beck
University of Illinois at Urbana-Champaign
August 2, 2001

Overview
• Local information• Distributed computing and
decision making• Dynamical behavior
• Communication constraints• Robustness
– Uncertainty– Reconfiguration & recovery
Hierarchical and Distributed Systems
Dominant Issues:
August 2, 20011/5

Recent and Ongoing Results• Heterogeneous distributed systems
– C. Beck, Approximation Methods for Heterogeneous Distributed Systems, in preparation
• Spatially invariant distributed systems– C. Beck and R. D’Andrea, Simplification of Spatially Distributed
Systems, CDC 1999 (and in preparation)
• Linear time-varying systems– C. Beck and S. Lall, Model Reduction Error Bounds for Linear Time-
varying Systems, MTNS 1998– S. Lall and C. Beck, Guaranteed Error Bounds for Model Reduction of
Linear Time-varying Systems, Trans. on Automatic Control, in review
• Systems with uncertainty– C. Beck, J. Doyle and K. Glover, Model Reduction of Multi-
Dimensional and Uncertain Systems, Trans. on Automatic Control, 1996– L. Andersson, A. Rantzer and C. Beck, Model Comparison and
Simplification, Int. Journal of Robust and Nonlinear Control, 1999
August 2, 20012/5

Overview
• Maintain system structure• Systematic approach to reduced model• Handle latency and uncertainty• Model varying levels of granularity
Objectives:Reduce model complexity for analysis, design, simulation
August 2, 20013/5

Overview
Utilize ideas from
Methods:
Focus on:
• Controls and Dynamical Systems• Optimization• Communications
• Unifying mathematical framework• Computational tractability• Communications
August 2, 20014/5

Overview
• Multi-Dimensional Systems• Principal Component Analysis• Semi-Definite Programming• Communications
– Protocols
– Aggregation
– Fluids models
Tools:
August 2, 20015/5

Spatially Distributed Systems
Local dynamic interactions between neighboring subsystems lead to overall complex system behavior
automobiles, formation flight, power networks, smart materials, temperature distribution
August 2, 20011/4
0G1G2G 1G 2G

Spatially Distributed Systems
• Individual vehicles maintain local control
• Aircraft interact physically via the fluid dynamics
• Communication between individual controllers to maintain formation and performance
Formation Flight
August 2, 20012/4

Spatially Distributed Systems
• Large scale: approximately 15,000 generators in U.S. with 750,000 MW capacity
• Generators, lines, loads are dynamic• Hierarchical control necessary • Control must be fault-tolerant• Control must be distributed
– generators independently controlled
– may be independently owned
Power Networks
August 2, 20013/4
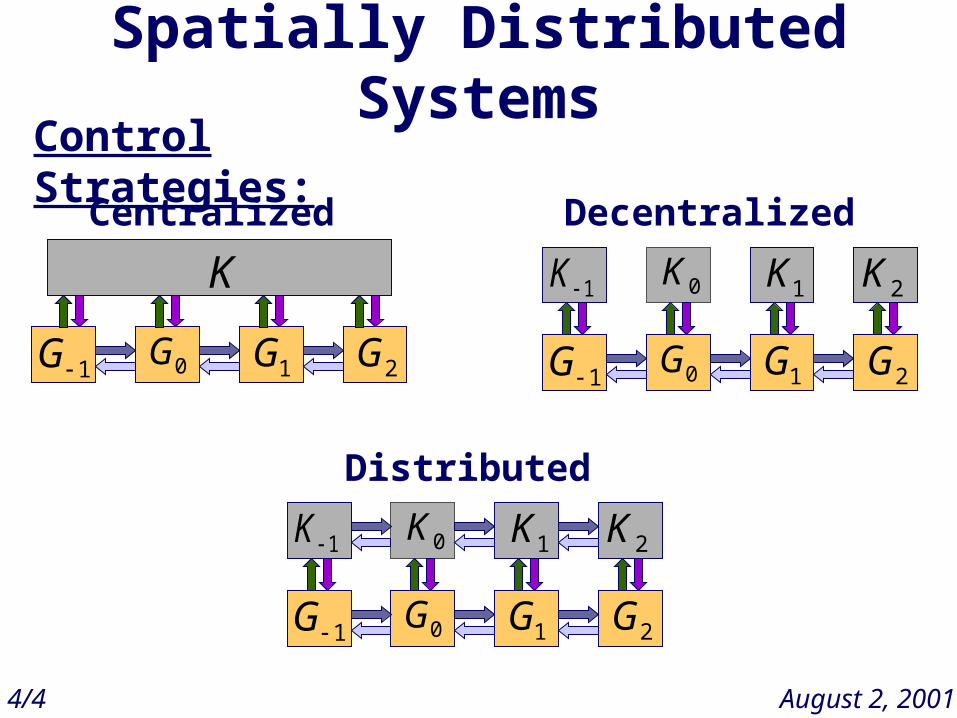
Spatially Distributed SystemsControl Strategies:
Centralized Decentralized
Distributed
August 2, 20014/4
2G0G
2G
2G
0G
0G1G1G
1G
1G
1G
1G
0K
0K
1K
1K
1K
1K
2K
2K
K

Modeling One-dimensional Systems
1/4
State-space form: nkx R
kkkkk
kkkkk
uDxCy
uBxAx
1
Shift operator:22: Z
Operator:
),,,,0(),,,( 210210 xxxxxxZ
22: G
G
ku
ky
DuCxy
BuZAxZx
August 2, 2001
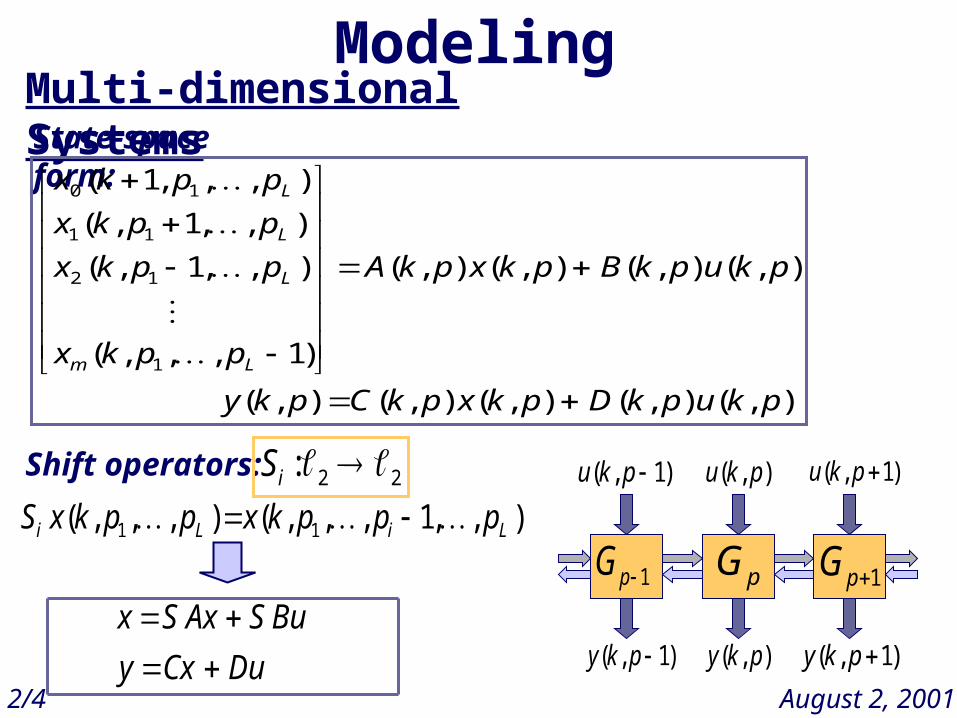
ModelingMulti-dimensional SystemsState-space form:
Shift operators:
),,1,,,(),,,( 11 LiLi pppkxppkxS
DuCxy
BuSAxSx
22: iS
pG1pG 1pG
),( pku
),( pky )1,( pky
)1,( pku)1,( pku
)1,( pky
),(),(),(),(),(
),(),(),(),(
)1,,,(
),,1,(
),,1,(
),,,1(
1
12
11
10
pkupkDpkxpkCpky
pkupkBpkxpkA
ppkx
ppkx
ppkx
ppkx
Lm
L
L
L
2/4 August 2, 2001
Modeling
August 2, 2001
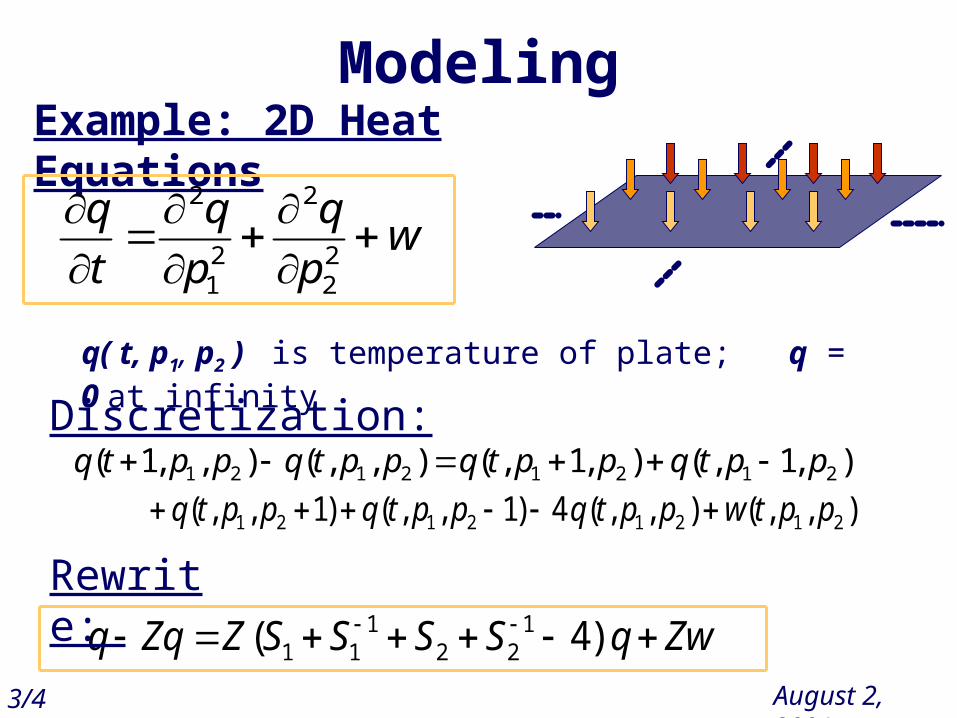
Example: 2D Heat Equations
3/4
wp
q
p
q
t
q
22
2
21
2
q( t, p1, p2 ) is temperature of plate; q = 0 at infinity
Discretization:),1,(),1,(),,(),,1( 21212121 pptqpptqpptqpptq
ZwqSSSSZZqq )4( 122
111
Rewrite:
),,(),,(4)1,,()1,,( 21212121 pptwpptqpptqpptq

ModelingExample: 2D Heat Equations
August 2, 20014/4
Define: state vector
shift operator ),,,,(diag 122
111
SSSSZS
Discretized Heat Equation is:
)( BwAxSx
where are memoryless
operators
0
0
0
0
1
),(,
00001
00001
00001
00001
11113
),( pkBpkA
TqSqSqSqSqx 122
111

Model Complexity ReductionSpatially Distributed Systems:
August 2, 20011/3
• Use multi-D realization matrices to form operator inequalities:
• P and Q inherit structure from multi-D system:
0
0***
****
CCQSAQSA
SSBBPSAPSA
1P
2P
mP
P )),((dim)(dim where pkxP ii
Model Complexity Reduction
August 2, 2001
Spatially Distributed Systems:
2/3
• Employ multi-D transform theory; operator inertia and congruence arguments; multi-D KYP lemma; LFT synthesis methods
• Constraints on P and Q:
• Apply multi-D principal component analysis
rnonsingula Spatial
definite positive Temporal
i
i
P
P

Model Complexity Reduction
• distributed system structure is maintained
• error bound, , determined before reducing
August 2, 2001
A Priori Error Bounds:
Given a distributed system G, find a lower dimension model Gr such that:
3/3
1G 0G 1G 2G2G
rGG
Spatially Distributed Systems
• Homogeneity/Symmetry– individual subsystems identical
– infinite extent –or- periodic boundary conditions
• Apply– standard Fourier methods
– linear algebra
– semi-definite programming (SDP)
Issues:
August 2, 20011/2

Spatially Distributed Systems
• Heterogeneity/Asymmetry– individual subsystems may vary
– finite chains of subsystems where leading and trailing subsystems behave differently
• Apply– system functions
– operator theory and analysis
– convex programming
Issues:
August 2, 20012/2

Ongoing Research
• Modeling multiple levels of granularity in interconnected systems– partitioned application of multi-D reduction methods
• Robustness analysis– stability analysis of model-reduced subsystem
interconnections
• Networks– stability robustness analysis and scalability issues
August 2, 20011/1

Multi-Level Granularity
August 2, 20011/1
Subsystem S1 Subsystem S2
• Analysis, design, simulation focus on S1• Reduce S2
dimensions reduce;then, stateSet 22
1
2
1S
S
S
S
S xP
PP
x
xx

Robustness Analysis
August 2, 20011/1
S1 S2
Model Reduction in Interconnected Systems
QRHQ 21inf SS
Reduce: rSS 2
then
rSS 1
If rSS1
interconnection stable
21 SS interconnection
stable

Next
August 2, 20011/1
• Delays wide ranging and
nonstationary
• Networked Systems limited bandwidth,
topological issues
0G1G2G 1G 2G

Future Considerations
• System Identification/Data-Based Models for Large Scale Systems– Subspace Identification (Principal Component Analysis)
– Subsystem Identification (Multi-Level Granularity)
• Real-time System Identification/Reduction: Reconfiguration and Recovery
August 2, 20011/1

Additional Research Projects• Hybrid Systems Control
– J. Chudoung and C. Beck, An Optimal Control Theory for Nonlinear Impulsive Systems, in preparation
– J. Chudoung and C. Beck, The Minimum Principle for Deterministic Impulsive Control Systems, to appear CDC 2001
• Multi-Dimensional Realization Theory– C. Beck and J. Doyle, A Necessary and Sufficient Minimality Condition for Uncertain
Systems, Trans. on Automatic Control, 1999– C. Beck, On Formal Power Series Representations for Uncertain Systems, Trans. on
Automatic Control, 2001– C. Beck and R. D’Andrea, Minimality, Reachability and Observability for a Class of
Multi-Dimensional Systems, Int. Journal of Robust and Nonlinear Control, in review
• Power Systems– P. Bendotti and C. Beck, On the Role of LFT Model Reduction Methods in Robust
Controller Synthesis for a Pressurized Water Reactor, Trans. on Control Systems Technology, 1999
• Human Dynamics Modeling– C. Beck, R. Smith, H. Lin and M. Bloom, On the Application of System Identification and
Model Validation Methods for Constructing Multivariable Anesthesia Response Models, CCA, 2000
– A. Mahboobin and C. Beck, Human Postural Control Modeling and System Analysis, in preparation
August 2, 20011/1




























