Embed Size (px)
Citation preview

Research ArticleModeling and Control of a Shear-Valve Mode MR Damper forSemiactive Vehicle Suspension
FanxuMeng and Jin Zhou
College of Mechanical and Electrical Engineering Nanjing University of Aeronautics and Astronautics Nanjing 210016 China
Correspondence should be addressed to Jin Zhou zhjnuaaeducn
Received 9 February 2019 Accepted 13 May 2019 Published 30 May 2019
Academic Editor Nicola Caterino
Copyright copy 2019 Fanxu Meng and Jin Zhou This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
Aiming at demonstrating the feasibility and capability of applying magnetorheological (MR) dampers to the vehicle vibrationcontrol the hyperbolic tangent model is established to characterize the performance of a shear-valve mode MR damper that wasdeveloped for a vehicle suspension system in this study An experimentally derived differential evolution (DE) algorithm is used tofind the optimal parameters of the model To demonstrate the effectiveness of the MR damper for semiactive suspension systems amodel was constructed of a quarter-car suspension system with the damper A fuzzy control algorithm with a correction factor wasadopted to control the output force of the damper and obtain better overall control of the performance of the suspension systemSimulation results indicate that the improved fuzzy control algorithm provides a better ride comfort than normal fuzzy controland passive control Furthermore the semiactive suspension system displayed effectively vibration suppression thanks to the MRdamper combined with corresponding control algorithms
1 Introduction
The suppression of vibration in vehicle suspension systemshas recently become an important issue in vehicle dynam-ics Passive suspension systems in vehicles do not meetthe requirements of ride comfort and driving safety As aresult more and more attention has been paid to semiactivesuspension systems because of their simple structure and lowpower consumption while still approximating to the controlperformance of active suspension Magnetorheological (MR)dampers are a kind of smart damper where the workingmediumusesMRfluidUnlike traditional hydraulic dampersthe damping characteristics of MR dampers can be quicklyand effectively controlled by regulating the current of amagnet coil inside the damper This makes them well-suitedto semiactive suspension control [1ndash4]
Establishing an accurate mechanical model of MRdampers is an important prerequisite for their applicationin suspension vibration control However the constitutiverelation of MR fluids under an external magnetic field israther complicated making work in this area especially
challenging Recently several MR damper models have beenreported including theBinghammodel [5] Bouc-Wenmodel[6] Improved Dahl model [7] LuGre friction model [8]and ANFIS model [9] Apart from the ANFIS model allof these are parametric models The Bingham model usesonly three parameters so it lends itself well to numericalprocessing However it is too simple to accurately describethe damping force-velocity delay of the MR damper Theother three models offer better accuracy but they all containintense nonlinear differential equations which inevitablyresults in difficulties in parameter identification Recentlya mechanical model has been developed that is based on ahyperbolic tangent function which is employed to describethe hysteretic behavior of MR devices The use of the explicitmathematical expression was found to improve the accuracyof the model and this has been verified in the literatures [10ndash12] As this approach bypasses the need for highly nonlinearequations it is better at identifying parameters and moresuitable for control applicationsWe therefore draw upon thisapproach to capture the dynamic characteristics of the MRdamper presented in this study In the case of nonparametric
HindawiMathematical Problems in EngineeringVolume 2019 Article ID 2568185 8 pageshttpsdoiorg10115520192568185
2 Mathematical Problems in Engineering
models such as the ANFIS model the identification processis still complicated due to their reliance on special modelingplatforms and the long train time
A semiactive control algorithm is required to preciselycontrol the current or voltage of MR dampers This makesthe application of an advanced control methodology a keyaspect of semiactive suspension systems Numerous controlalgorithms have been studied in this regard with the sky-hook control strategy being the most typical as originallyproposed by Karnopp et al [13] The essence of this strategyis to provide a simple means of achieving on off controlwith the current (or voltage) of the MR damper jumpingbetween zero and its maximum value However this canlead to self-excited vibration phenomena Fergani developedan observer-based LPVHinfin controller for MR suspensionsystems [14] Simulation results for this controller indicatethat it can more effectively reduce the absolute displacementof the sprung mass than would be the case passive suspen-sion Zhang et al provided an active disturbance rejectioncontrol (ADRC) method to solve the problem of vibrationin semiactive suspension systems [15] However this kindof control algorithm is relatively complicated and needs thecontrolled objectrsquos model to be extremely accurate Rashid etal by contrast proposed a fuzzy controller for semiactivecar suspension systems [16] This does not rely on a precisemathematical model of the system and interference fromexternal factors or changes in the system parameters havelittle impact on the control effect It also exhibits good levels ofrobustness Therefore it is well-suited to use in automobileswith complicated nonlinear time-variant systems [17ndash19]
In this paper a shear-valvemodeMR damper is proposedas a way of realizing semiactive control of vehicle suspensionsystems In the next section a description of the damperprototype and an experimental device are presented andthe nonlinear characteristics of the damper are investigatedexperimentally The hyperbolic tangent model of the MRdamper is established in Section 3 In Section 4 an improvedfuzzy control algorithm is applied and the performance of asemiactive suspension systemwith anMR damper is assessedunder random road excitation Finally the conclusions arepresented in Section 5
2 Experimental Testing of the MR Damper
The MR damper employs the magnetic field generated bycoil current to change flow behaviors of magnetic packingmedium at the gap between the piston and cylinder so as tocarry out the effective control of damping force Accordingto the operation principle of MR damper a prototype shear-valve mode MR damper with a double rod structure isfirst of all manufactured Figure 1 shows the structure ofprototype The inner cylinder of the device which was filledwith commercial MR fluid MRF-140 (LORD Co USA)was completely divided into an upper and lower workingchamber by the piston The piston did reciprocating motionin the cylinder When it moved the volume of the upperchamber was always equal to volume of the lower chamberAs a result there is no need for air chamber compensationthus avoiding the influence of rigid nonlinear compensation
on the damperrsquos properties The proposed damper wastested using a computer-controlled MTS machine (PA-100Shenyang China) which was equipped with force anddisplacement transducers as shown in Figure 2 The MTSmachinewas driven by a hydraulic actuator that could imposean axial load on the specimens In addition theMTSmachinecomprised a powerful signal data acquisition system whichoffered complete on-line data acquisition for the dampingforce and displacement caused by theMRdamper During theexperiments aDCpower supplywas used to generate currentin the EMcoil of theMRdamperThe excitation signal chosenfor the test was a sinusoidal wave with an amplitude of 4mm The excitation frequency was set at 2 Hz The currentapplied to the magnetic coil was stepped between 0 A and015A at 005 A intervals Additional currents of 025A and03A were applied Hysteretic curves for the measured force-displacement (Figure 3(a)) and force-velocity (Figure 3(b))were obtained using a 20 Hz sine wave signal with a constantamplitude of 4 mm at the different input currentsThe resultsindicate that the hysteretic characteristics of an MR damperstrongly depended on the input current
3 Dynamic Modeling of the MR Damper
31 Hyperbolic Tangent Model The numerical stability of thehyperbolic tangent model during severe nonlinear damperbehavior made it an appropriate choice for characterizingthe dynamic response characteristics of MR dampers Theconceptual configuration of the mechanical model is shownin Figure 4 In this model a hysteretic component is used todescribe hysteresis characteristics and a set of spring-dashpotelements is used to describe the viscous damping and stiffnesscharacteristics
The expression of this model is given as [12]
119865 (119905) = 1198880 + 1198960119909 + 120572119911 + 1198910 (1)
119911 = tanh (120573 ( + V sgn (119909))) (2)
where 1198880 and 1198960 are viscous damping and the stiffnesscoefficients 120572 is a scale factor 1198910 is an offset of the outputdamping force 119911 acts as the hysteretic variable 120573 and Vare the shape parameters controlling the slope and width ofthe hysteresis loops respectively and sgn(sdot) is the signumfunction
Combining these two formulas yields
119865 (119905) = 1198880 + 1198960119909 + 120572 tanh (120573 ( + V sgn (119909))) + 1198910 (3)
A set of six constant parameters that relate the character-istic shape parameters to the excitation current was identifiedand this set of parameters was represented as follows
Θ = [1198880 1198960 120572 120573 V 1198910] (4)
32 Estimation Using Sensitivity Analysis Sensitivity analysisuses a sensitivity coefficient to show the impact of inputvariables on the output value of a model [20] The larger thesensitivity coefficient the greater the influence of the variableon the output of the model [21ndash23]The sensitivity coefficient
Mathematical Problems in Engineering 3
Piston Rod
EM Coil
Seal
Piston
Cylinder
(a) (b)
Figure 1 Experimental MR damper (a) schematic (b) prototype
The MR damper
Test platform
Hydraulic actuator
DC power supply
The data collection and processing system
Figure 2 Experimental setup
can be considered as a quantitative expression of parametersensitivity Firstly one model parameter is specified andthe output response of hyperbolic tangent model will besolved under the condition that the value of the parameteris gradually changed Then the result will be compared withthe model output response obtained from the reference valueof this parameter to evaluate the influence of the modelparameter on the model output The formula for calculatingthe sensitivity coefficient is as follows
119864 = 1119873 [119873sum119894=1
119865119894 minus 1198651015840119894 ]12
(5)
where 119865119894 is the damping force obtained by substituting thereference values of the parameters into the MR dampermodel 1198651015840119894 refers to the variable parameters substituted intothe corresponding damping force obtained by the model Nis the number of sampling points
In this study correlation between the various parametersin the model was not considered This meant that theother parameters could be fixed while the sensitivity of asingle parameter was examined The reference values of theparameters in the hyperbolic tangent model were defined as
follows 120572 = 1100233 120573 = 00774 V = 74899 1198880 = 16751 1198960= -11821 1198910 = 13044 This set of values is obtained by fittingmeasured responses of the MR damper in which the currentis chosen as 0A and the excitation frequency and amplitudeare 2 Hz and 4 mm respectively The possible variation rangeof a single parameter in thismodel wasplusmn50 of the referencevalues
Figure 5 depicts the sensitivity of each parameter inthe hyperbolic model As can be seen the sensitivity ofparameters 120572 and 1198880 is the greatest with it increasing as therange of variation ranges increases When 120573 decreases orincreases by the same magnitude the effect of the incrementin the value of 120573 upon the model is larger than that ofa decrease in the value 120573 The sensitivity values for theother parameters are less than 01 which means they are notsensitive to the output force of the model
33 Parameter Identification andValidation Once amechan-ical model is utilized to describe the dynamic characteristicsof anMR damper properly themodelrsquos parameters have to beestimatedThedifferential evolution (DE) algorithm is a novelparallel stochastic optimization method that has attractedlots of attention in recent years [24 25] In comparison toother evolutionary algorithms the DE algorithm has certaindisadvantages in terms of optimization and search speed Ituses real number encoding with a difference-based simplemutation operation and a survival strategy of one-to-onecompetition thus reducing the complexity of the geneticmanipulation The optimization process of DE algorithminvolves three basic operations mutation crossover andselection Initially a group of the random initialized popu-lation can be generated in the feasible solution space of anoptimization problem Furthermore through mutation andcrossover operations new individuals would be generated toform new generations Finally the selection operation canbe performed on the individuals among the two populationsto retain the best individuals for the next population Theentire implementation process of the algorithm is performedas described in [26] In this work the control parameters usedin the DE algorithm are given by the maximum number of
4 Mathematical Problems in Engineering
000A
005A010A
015A
025A
030A
minus1500
minus1000
minus500
0
500
1000
1500Fo
rce (
N)
minus3 minus15 0 15 3 45minus45Displacement (mm)
(a)
000A005A010A
015A
025A030A
minus40 minus20 0 20 40 60minus60Velocity (mms)
minus1500
minus1000
minus500
0
500
1000
1500
Forc
e (N
)
(b)
Figure 3 Measured hysteretic curves of the MR damper under different currents (a) force vs displacement and (b) force vs velocity
Hysteresis
Spring
Dashpot
Damping force
Displacement
Figure 4 Schematic of hyperbolic tangent model
evolutionary generations 119873119875 = 400 the crossover factor CR= 08 and the mutation scale factor F=05
Figure 6 depicts a comparison between the measuredresponses (denoted by the solid line) and estimated responses(denoted by the dotted line) for the experimentalMR damperaccording to different currents The excitation frequencyand amplitude for these tests were 2 Hz and 4 mm Theparameters of the hyperbolic tangent model are representedas a polynomial function relationship of input current 119894 andare as follows [6 27 28]
1198880 = 11988801198861198942 + 1198880119887119894 + 1198880119888 (6)
1198960 = 11989601198861198942 + 1198960119887119894 + 1198960119888 (7)
120572 = 120572a1198942 + 120572119887119894 + 120572119888 (8)
V = V1198861198942 + V119887119894 + V119888 (9)
0 50minus50 minus25 25Variation range of model parameters ()
0
05
1
15
2
25
3
E
]
C0k0f0
Figure 5 Influence of each parameter on the response of hyperbolictangent model
The values for the identification parameters of the hyperbolictangent model at various current levels are listed in Table 1
4 Controller Formulation
41 Quarter-Car Suspension Model with MR Damper Priorto executing the semiactive control algorithm a typicalquarter-car model with an MR damper was established (seeFigure 7) This model is known to be able to reflect theessential characteristics of a real vehicle suspension system
Mathematical Problems in Engineering 5
000A
005A010A
015A
025A
030A
minus3 minus15 0 15 3 45minus45Displacement (mm)
minus1500
minus1000
minus500
0
500
1000
1500Fo
rce (
kN)
(a)
000A005A010A
015A
025A030A
minus1500
minus1000
minus500
0
500
1000
1500
minus40 minus20 0 20 40 60minus60
(b)
Figure 6 Comparison between the estimated andmeasured responses of theMR damper (a) force vs displacement and (b) force vs velocity
ms
mt
Zs
Fdks
kt
Zu
Zr
Figure 7 Semiactive suspension model
Table 1 Identification results for hyperbolic tangent model usingthe DE algorithm
Parameter Value Parameter Value1198880119886 17 Ns mmminus1 120572119887 179 N1198880119887 72 Ns mmminus1 120572119888 994 N1198880119888 51 Ns mmminus1 120573 0291198960119886 67 N mmminus1 V119886 31mm sminus11198960119887 ndash854 Ns mmminus1 V119887 56 mm sminus11198960119888 ndash017 Ns mmminus1 V119888 096 mm sminus1120572119886 18 N 1198910 ndash0127 N
By applyingNewtonrsquos second law the equations governing thequarter-car model can be expressed as follows
119898119904119904 + 119896119904 (119911119904 minus 119911119906) + 119865119889 = 0 (10)
119898119904119906 + 119896119905 (119911119906 minus 119911119903) minus 119896119904 (119911119904 minus 119911119906) minus 119865119889 = 0 (11)
where 119898119904 is the sprung mass which represents the carbody 119898119906 is the unsprung mass which represents the wheelassembly 119896119904 stands for the stiffness of the suspension systemk119905 is the primary stiffness 119911119904 is the displacement of thesprung mass 119911119906 is the displacement of the sprung mass 119911119903represents the road excitation 119865119889 stands for the controllableforce produced by the MR damper The parameter values forthe quarter-car model are determined 119898119904=391 kg 119898119906=507kg 119896119904= 60000 Nm and 119896119905= 181000 Nm
42 Improved Fuzzy Control By using a fuzzy controlalgorithm with a correction factor a fuzzy controller canachieve real-time control by changing the correction factorand adjusting the control rules The principle of the fuzzycontrol algorithm with a self-set correction factor is shownin Figure 8 The improved algorithm has two key partsFirst it defines a two-dimensional fuzzy system that cantake the relative velocity (119904 minus 119906) of the suspension andthe vertical acceleration (119904) of the car body as its inputvariables with the current I of the MR damper servingas its output variable The discourse domain of the inputvariables is set as [minus1 1] The corresponding fuzzy languagecollection is NB NS ZE PS PB where each elementrepresents negative big (NB) negative small (NS) zero (ZE)positive small (PS) and positive big (PB) respectively Thediscourse domain of the output variables is set as [minus1 1]The corresponding fuzzy language collection to be taken intoaccount is S M H A trigonometricmembership functionis used for the controllerrsquos fuzzy inferenceThe fuzzy rule tableis formed as illustrated in Table 2 A detailed analysis anddescription of normal fuzzy control algorithms can found in[29 30]
The other part is the correction factor The correctionfactor 119870119888 is determined by established fuzzy rules as seen inTable 3 The bodyrsquos vertical acceleration 119904 and the relativevelocity of the suspension 119904 minus 119906 are taken as the input
6 Mathematical Problems in Engineering
Clarification
Quarter MRsuspension
Normal fuzzyrules and fuzzy
inference
Clarification
Quantizationfactor I
Quantizationfactor II
Quantizationfactor II
Quantizationfactor III
Current Izs
zs minus zu
zs minus zu
zs
Fuzzy rules andfuzzy inference forcorrection factor
Kc
Kc
Kf ScalingFactorKi
Figure 8 Block diagram for fuzzy control algorithm with a correction factor
Table 2 Fuzzy control rules
119868 119904 minus 119906NB NS ZE PS PB
119904NB S S H H HNS S S M M MZE M S S S SPS M M S S SPB H H H S L
Table 3 Fuzzy rules for correction factor
119870119888 119904 minus 119906NB NS ZE PS PB
119904NB PB PM PS ZR ZRNS PM PS ZR ZR ZRZE PS ZR ZR ZR PSPS ZE ZR ZR PS PMPB ZE ZR PS PM PB
Table 4 RMS value of the system responses
Evaluation index Passive Fuzzy Improved fuzzyBody accelerationmsdotsminus2 10837 05458 04044Suspension deflectionm 00100 00041 00036Tyre displacementm 00042 00026 00020
language variables The correction factor is multiplied bythe scale factor of the fuzzy controller mentioned above Bychanging the value of the correction factor 119870119888 according tothe adjustment of the scale factor the output force of the MRdamper will be changed to enhance the adaptability of thesemiactive suspension system to road excitation
43 Numerical Simulations In this section we report on thenumerical simulations of theMRcontrollable suspension sys-tem as described in Section 41 The simulations are carriedout usingMatlabSimulinkTheMRdampermodel describedin Section 3 is also employed in the simulation Actual time-domain road displacement input is simulated using the power
minus4
minus2
0
2
4
Body
acce
lera
tion
(mM
2)
42 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 9 Body acceleration response under random road input
spectrum density of road roughness according to [31] whichis defined as
119903 (119905) = minus2120587119891119885119903 (119905) + 2120587radic119866119902 (1198990) 120592120596 (119905) (12)
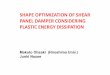
where 119885119903(119905) is random road excitation input 119891 is the cut-off frequency in space domain 119866119902(1198990) is the coefficient ofroad roughness and set as 256times10minus6 m3 in the C-level roadcondition and 120592 is the vehicle speed and set as 50 msAnalyses of the body acceleration suspension deflection andtire displacement under random road input are presentedin Figures 9ndash11 and summarized in Table 4 It is clearlyobserved that the controlled MR suspension with both thefuzzy controller and the improved fuzzy controller produce asuperior damping performance to the passive suspension Forthe body acceleration and tire displacement the improvedfuzzy controller generates better results than the ordinaryfuzzy controller It also performed slightly better for thesuspension deflection
Mathematical Problems in Engineering 7
minus0024
minus0016
minus0008
0
0008
0016
0024
Susp
ensio
n de
flect
ion
(m)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 10 Suspension deflection under random road input
minus0012
minus0008
minus0004
0
0004
0008
0012
Tyre
disp
lace
men
t (m
)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 11 Tyre displacement under random road input
Body acceleration is the primary indicator for evaluatingthe ride comfort of a vehicle [32] According to the vibrationstandard ISO 2631 ride comfort can be evaluated by using theroot mean square of the weighed acceleration of a vehiclersquosbody The RMS value is also calculated for the suspensiondeflection and tire displacement As depicted inTable 4 whencompared to passive suspension adoption of fuzzy controlwith the correction factor and traditional fuzzy controllead to 627 and 496 reduction in body acceleration a640 and 590 reduction in suspension deflection and a542 and 381 reduction in tire displacement respectivelyAdditionally when compared to traditional fuzzy controlsemiactive suspension using fuzzy control with a correctionfactor produces a better damping effect indicating that useof the correction factor enhances the adaptability of thecontroller
5 Conclusions
In this study a shear-valve mode magnetorheological (MR)damper is developed to improve the vibration suppression invehicle suspension systems The hyperbolic tangent model isestablished to describe the performance of the MR damperbased on experimental data generated when the damper wassubjected to sinusoidal excitation Moreover a sensitivityanalysis for each parameter is performed and the influenceof the various parameters on the model output is evaluatedThemodel parameters are identified by the DE algorithm andconfirmed as polynomial functions of the current Finally afuzzy control algorithm with a correction factor is applied insimulation to assess the performance of the semiactive sus-pension system with an MR damper The simulation resultsshow that the improved fuzzy controller leads to enhancethe riding comfort when compared to passive suspensionand greater adaptability under random road excitation Infurther work a bench test will be carried out to validate thesimulation results for the vibration reduction performance ofthe proposed MR damper and semiactive control strategy
Data Availability
No additional unpublished data are available
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by the Program of National NaturalScience Foundation of China (no 51675261) and by Fundingof Jiangsu Innovation Program for Graduate Education (noKYLX16 0324)
References
[1] G Z Yao F F Yap G Chen W H Li and S H Yeo ldquoMRdamper and its application for semi-active control of vehiclesuspension systemrdquo Mechatronics vol 12 no 7 pp 963ndash9732002
[2] Q-H Nguyen and S-B Choi ldquoOptimal design of MR shockabsorber and application to vehicle suspensionrdquo Smart Mate-rials and Structures vol 18 no 3 Article ID 035012 2009
[3] R S Prabakar C Sujatha and S Narayanan ldquoResponse of aquarter car model with optimal magnetorheological damperparametersrdquo Journal of Sound and Vibration vol 332 no 9 pp2191ndash2206 2013
[4] S S Sun D H Ning J Yang H Du S W Zhang andW H LildquoA seat suspensionwith a rotarymagnetorheological damper forheavy duty vehiclesrdquo SmartMaterials and Structures vol 25 no10 Article ID 105032 2016
[5] R Stanway J L Sproston and N G Stevens ldquoNon-linearmodeling of an electro-heological vibration damperrdquo Journal ofElectrostatics vol 20 no 2 pp 167ndash184 1987
[6] B F Spencer Jr S J Dyke M K Sain and J D CarlsonldquoPhenomenological model for magnetorheological dampersrdquo
8 Mathematical Problems in Engineering
Journal of Engineering Mechanics vol 123 no 3 pp 230ndash2381997
[7] N Aguirre F Ikhouane J Rodellar and R ChristensonldquoParametric identification of the Dahl model for large scale MRdamperrdquo Structural Control and Health Monitoring vol 19 no3 pp 332ndash347 2012
[8] F Yang R Sedaghati and E Esmailzadeh ldquoDevelopment ofLuGre friction model for large-scale magneto-rheological fluiddampersrdquo Journal of Intelligent Material Systems and Structuresvol 20 no 15 pp 923ndash937 2009
[9] K C Schurter and P N Roschke ldquoFuzzy modeling of amagnetorheological damper using ANFISrdquo in Proceedings of the9th IEEE International Conference on Fuzzy Systems (FUZZ-IEEE rsquo00) vol 1 pp 122ndash127 IEEE San Antonio Tex USA2000
[10] S Guo S Yang and C Pan ldquoDynamic modeling of magne-torheological damper behaviorsrdquo Journal of Intelligent MaterialSystems and Structures vol 17 no 1 pp 3ndash14 2006
[11] Z Jiang andR Christenson ldquoA comparison of 200 kNmagneto-rheological damper models for use in real-time hybrid simula-tion pretestingrdquo Smart Materials and Structures vol 20 no 62011
[12] NMKwokQ PHa THNguyen J Li and B Samali ldquoA novelhysteretic model for magnetorheological fluid damper andparameter identification using particle swarm optimizationrdquoSensors and Actuators A Physical vol 132 no 2 pp 441ndash4512006
[13] D Karnopp M J Crosby and R A Harwood ldquoVibrationcontrol using semi-active force generatorsrdquo ASME Journal ofEngineering for Industry vol 96 no 2 pp 619ndash626 1974
[14] S Fergani L Menhour O Sename L Dugard and B DrsquoAndreaNovel ldquoA new LPVHinfin semi-active suspension control strat-egy with performance adaptation to roll behavior based on nonlinear algebraic road profile estimationrdquo in Proceedings of the52nd IEEE Conference on Decision and Control CDC rsquo13 pp3511ndash3516 Florence Italy 2013
[15] Z Zhang H R Karimi H Huang and K G RobbersmyrldquoVibration control of a semiactive vehicle suspension systembased on extended state observer techniquesrdquo Journal of AppliedMathematics vol 2014 Article ID 248297 10 pages 2014
[16] M Rashid M Hussain and N Rahim ldquoSemi-active carsuspension controller design using fuzzy-logic techniquerdquo inProceedings of the Conference on Research and DevelopmentStudent Conference on Research and Development SCOReD rsquo02pp 149ndash152 Shah Alam Malaysia 2002
[17] MM Rashid N A RahimM A Hussain andM A RahmanldquoAnalysis and experimental study of magnetorheological-baseddamper for semiactive suspension system using fuzzy hybridsrdquoIEEE Transactions on Industry Applications vol 47 no 2 pp1051ndash1059 2011
[18] A Shojaei H Metered S Shojaei and S O Oyadiji ldquoTheo-retical and experimental investigation of magneto-rheologicaldamper based semiactive suspension systemsrdquo InternationalJournal of Vehicle Structures and Systems vol 5 no 3-4 pp 109ndash120 2013
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control - Part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57 pp 288ndash301 2015
[20] R A Sharifan A Roshan M Aflatoni Ajahedi and M Zol-ghadr ldquoUncertainty and sensitivity analysis of SWMMmodel in
computation of manhole water depth and subcatchment peakfloodrdquo in Proceedings of the 6th International Conference onSensitivity Analysis of Model Output SAMO rsquo10 pp 7739-7740Italy July 2010
[21] MDMorris ldquoFactorial sampling plans for preliminary compu-tational experimentsrdquo Technometrics vol 33 no 2 pp 161ndash1741991
[22] I N Moghaddam Z Salami and L Easter ldquoSensitivity analysisof an excitation system in order to simplify and validatedynamic model utilizing plant test datardquo IEEE Transactions onIndustry Applications vol 51 no 4 pp 3435ndash3441 2015
[23] DHChoKHChu andE YKim ldquoA critical assessment of theuse of a surface reaction rate equation to correlate biosorptionkineticsrdquo International Journal of Environmental Science andTechnology vol 12 no 6 pp 1ndash10 2015
[24] R Storn and K Price ldquoDifferential evolution a simple and effi-cient heuristic scheme for global optimization over continuosspacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[25] F Neri and V Tirronen ldquoRecent advances in differential evolu-tion a survey and experimental analysisrdquo Artificial IntelligenceReview vol 33 no 1-2 pp 61ndash106 2010
[26] KWang XWang JWang et al ldquoSolving parameter identifica-tion problem of nonlinear systems using differential evolutionalgorithmrdquo in Proceedings of the 2nd International Symposiumon Intelligent Information Technology Application IITA rsquo08 pp687ndash691 China 2008
[27] S J Dyke B F Spencer Jr M K Sain and J D CarlsonldquoModeling and control of magnetorheological dampers forseismic response reductionrdquo Smart Materials and Structuresvol 5 no 5 pp 565ndash575 1996
[28] Y Yu Y Li J Li and X Gu ldquoA hysteresis model for dynamicbehaviour of magnetorheological elastomer base isolatorrdquoSmartMaterials and Structures vol 25 no 5 Article ID 0550292016
[29] E H Mamdani ldquoApplication of fuzzy algorithms for control ofsimple dynamic plantsrdquo Proceedings of the IEEE vol 121 no 12pp 1585ndash1588 1974
[30] M Laoufi and A Eskandarian ldquoFuzzy logic control for activesuspension of a non-linear full-vehicle modelrdquo in Proceedingsof the IEEE Intelligent Vehicles Symposium pp 677ndash684 XirsquoanChina 2009
[31] Z Yonglin and Z Jiafan ldquoNumerical simulation of stochasticroad process using white noise filtrationrdquo Mechanical Systemsand Signal Processing vol 20 no 2 pp 363ndash372 2006
[32] I Karen N Kaya F Ozturk I Korkmaz M Yildizhan andA Yurttac ldquoA design tool to evaluate the vehicle ride comfortcharacteristics modeling physical testing and analysisrdquo TheInternational Journal of Advanced Manufacturing Technologyvol 60 no 5-8 pp 755ndash763 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

2 Mathematical Problems in Engineering
models such as the ANFIS model the identification processis still complicated due to their reliance on special modelingplatforms and the long train time
A semiactive control algorithm is required to preciselycontrol the current or voltage of MR dampers This makesthe application of an advanced control methodology a keyaspect of semiactive suspension systems Numerous controlalgorithms have been studied in this regard with the sky-hook control strategy being the most typical as originallyproposed by Karnopp et al [13] The essence of this strategyis to provide a simple means of achieving on off controlwith the current (or voltage) of the MR damper jumpingbetween zero and its maximum value However this canlead to self-excited vibration phenomena Fergani developedan observer-based LPVHinfin controller for MR suspensionsystems [14] Simulation results for this controller indicatethat it can more effectively reduce the absolute displacementof the sprung mass than would be the case passive suspen-sion Zhang et al provided an active disturbance rejectioncontrol (ADRC) method to solve the problem of vibrationin semiactive suspension systems [15] However this kindof control algorithm is relatively complicated and needs thecontrolled objectrsquos model to be extremely accurate Rashid etal by contrast proposed a fuzzy controller for semiactivecar suspension systems [16] This does not rely on a precisemathematical model of the system and interference fromexternal factors or changes in the system parameters havelittle impact on the control effect It also exhibits good levels ofrobustness Therefore it is well-suited to use in automobileswith complicated nonlinear time-variant systems [17ndash19]
In this paper a shear-valvemodeMR damper is proposedas a way of realizing semiactive control of vehicle suspensionsystems In the next section a description of the damperprototype and an experimental device are presented andthe nonlinear characteristics of the damper are investigatedexperimentally The hyperbolic tangent model of the MRdamper is established in Section 3 In Section 4 an improvedfuzzy control algorithm is applied and the performance of asemiactive suspension systemwith anMR damper is assessedunder random road excitation Finally the conclusions arepresented in Section 5
2 Experimental Testing of the MR Damper
The MR damper employs the magnetic field generated bycoil current to change flow behaviors of magnetic packingmedium at the gap between the piston and cylinder so as tocarry out the effective control of damping force Accordingto the operation principle of MR damper a prototype shear-valve mode MR damper with a double rod structure isfirst of all manufactured Figure 1 shows the structure ofprototype The inner cylinder of the device which was filledwith commercial MR fluid MRF-140 (LORD Co USA)was completely divided into an upper and lower workingchamber by the piston The piston did reciprocating motionin the cylinder When it moved the volume of the upperchamber was always equal to volume of the lower chamberAs a result there is no need for air chamber compensationthus avoiding the influence of rigid nonlinear compensation
on the damperrsquos properties The proposed damper wastested using a computer-controlled MTS machine (PA-100Shenyang China) which was equipped with force anddisplacement transducers as shown in Figure 2 The MTSmachinewas driven by a hydraulic actuator that could imposean axial load on the specimens In addition theMTSmachinecomprised a powerful signal data acquisition system whichoffered complete on-line data acquisition for the dampingforce and displacement caused by theMRdamper During theexperiments aDCpower supplywas used to generate currentin the EMcoil of theMRdamperThe excitation signal chosenfor the test was a sinusoidal wave with an amplitude of 4mm The excitation frequency was set at 2 Hz The currentapplied to the magnetic coil was stepped between 0 A and015A at 005 A intervals Additional currents of 025A and03A were applied Hysteretic curves for the measured force-displacement (Figure 3(a)) and force-velocity (Figure 3(b))were obtained using a 20 Hz sine wave signal with a constantamplitude of 4 mm at the different input currentsThe resultsindicate that the hysteretic characteristics of an MR damperstrongly depended on the input current
3 Dynamic Modeling of the MR Damper
31 Hyperbolic Tangent Model The numerical stability of thehyperbolic tangent model during severe nonlinear damperbehavior made it an appropriate choice for characterizingthe dynamic response characteristics of MR dampers Theconceptual configuration of the mechanical model is shownin Figure 4 In this model a hysteretic component is used todescribe hysteresis characteristics and a set of spring-dashpotelements is used to describe the viscous damping and stiffnesscharacteristics
The expression of this model is given as [12]
119865 (119905) = 1198880 + 1198960119909 + 120572119911 + 1198910 (1)
119911 = tanh (120573 ( + V sgn (119909))) (2)
where 1198880 and 1198960 are viscous damping and the stiffnesscoefficients 120572 is a scale factor 1198910 is an offset of the outputdamping force 119911 acts as the hysteretic variable 120573 and Vare the shape parameters controlling the slope and width ofthe hysteresis loops respectively and sgn(sdot) is the signumfunction
Combining these two formulas yields
119865 (119905) = 1198880 + 1198960119909 + 120572 tanh (120573 ( + V sgn (119909))) + 1198910 (3)
A set of six constant parameters that relate the character-istic shape parameters to the excitation current was identifiedand this set of parameters was represented as follows
Θ = [1198880 1198960 120572 120573 V 1198910] (4)
32 Estimation Using Sensitivity Analysis Sensitivity analysisuses a sensitivity coefficient to show the impact of inputvariables on the output value of a model [20] The larger thesensitivity coefficient the greater the influence of the variableon the output of the model [21ndash23]The sensitivity coefficient
Mathematical Problems in Engineering 3
Piston Rod
EM Coil
Seal
Piston
Cylinder
(a) (b)
Figure 1 Experimental MR damper (a) schematic (b) prototype
The MR damper
Test platform
Hydraulic actuator
DC power supply
The data collection and processing system
Figure 2 Experimental setup
can be considered as a quantitative expression of parametersensitivity Firstly one model parameter is specified andthe output response of hyperbolic tangent model will besolved under the condition that the value of the parameteris gradually changed Then the result will be compared withthe model output response obtained from the reference valueof this parameter to evaluate the influence of the modelparameter on the model output The formula for calculatingthe sensitivity coefficient is as follows
119864 = 1119873 [119873sum119894=1
119865119894 minus 1198651015840119894 ]12
(5)
where 119865119894 is the damping force obtained by substituting thereference values of the parameters into the MR dampermodel 1198651015840119894 refers to the variable parameters substituted intothe corresponding damping force obtained by the model Nis the number of sampling points
In this study correlation between the various parametersin the model was not considered This meant that theother parameters could be fixed while the sensitivity of asingle parameter was examined The reference values of theparameters in the hyperbolic tangent model were defined as
follows 120572 = 1100233 120573 = 00774 V = 74899 1198880 = 16751 1198960= -11821 1198910 = 13044 This set of values is obtained by fittingmeasured responses of the MR damper in which the currentis chosen as 0A and the excitation frequency and amplitudeare 2 Hz and 4 mm respectively The possible variation rangeof a single parameter in thismodel wasplusmn50 of the referencevalues
Figure 5 depicts the sensitivity of each parameter inthe hyperbolic model As can be seen the sensitivity ofparameters 120572 and 1198880 is the greatest with it increasing as therange of variation ranges increases When 120573 decreases orincreases by the same magnitude the effect of the incrementin the value of 120573 upon the model is larger than that ofa decrease in the value 120573 The sensitivity values for theother parameters are less than 01 which means they are notsensitive to the output force of the model
33 Parameter Identification andValidation Once amechan-ical model is utilized to describe the dynamic characteristicsof anMR damper properly themodelrsquos parameters have to beestimatedThedifferential evolution (DE) algorithm is a novelparallel stochastic optimization method that has attractedlots of attention in recent years [24 25] In comparison toother evolutionary algorithms the DE algorithm has certaindisadvantages in terms of optimization and search speed Ituses real number encoding with a difference-based simplemutation operation and a survival strategy of one-to-onecompetition thus reducing the complexity of the geneticmanipulation The optimization process of DE algorithminvolves three basic operations mutation crossover andselection Initially a group of the random initialized popu-lation can be generated in the feasible solution space of anoptimization problem Furthermore through mutation andcrossover operations new individuals would be generated toform new generations Finally the selection operation canbe performed on the individuals among the two populationsto retain the best individuals for the next population Theentire implementation process of the algorithm is performedas described in [26] In this work the control parameters usedin the DE algorithm are given by the maximum number of
4 Mathematical Problems in Engineering
000A
005A010A
015A
025A
030A
minus1500
minus1000
minus500
0
500
1000
1500Fo
rce (
N)
minus3 minus15 0 15 3 45minus45Displacement (mm)
(a)
000A005A010A
015A
025A030A
minus40 minus20 0 20 40 60minus60Velocity (mms)
minus1500
minus1000
minus500
0
500
1000
1500
Forc
e (N
)
(b)
Figure 3 Measured hysteretic curves of the MR damper under different currents (a) force vs displacement and (b) force vs velocity
Hysteresis
Spring
Dashpot
Damping force
Displacement
Figure 4 Schematic of hyperbolic tangent model
evolutionary generations 119873119875 = 400 the crossover factor CR= 08 and the mutation scale factor F=05
Figure 6 depicts a comparison between the measuredresponses (denoted by the solid line) and estimated responses(denoted by the dotted line) for the experimentalMR damperaccording to different currents The excitation frequencyand amplitude for these tests were 2 Hz and 4 mm Theparameters of the hyperbolic tangent model are representedas a polynomial function relationship of input current 119894 andare as follows [6 27 28]
1198880 = 11988801198861198942 + 1198880119887119894 + 1198880119888 (6)
1198960 = 11989601198861198942 + 1198960119887119894 + 1198960119888 (7)
120572 = 120572a1198942 + 120572119887119894 + 120572119888 (8)
V = V1198861198942 + V119887119894 + V119888 (9)
0 50minus50 minus25 25Variation range of model parameters ()
0
05
1
15
2
25
3
E
]
C0k0f0
Figure 5 Influence of each parameter on the response of hyperbolictangent model
The values for the identification parameters of the hyperbolictangent model at various current levels are listed in Table 1
4 Controller Formulation
41 Quarter-Car Suspension Model with MR Damper Priorto executing the semiactive control algorithm a typicalquarter-car model with an MR damper was established (seeFigure 7) This model is known to be able to reflect theessential characteristics of a real vehicle suspension system
Mathematical Problems in Engineering 5
000A
005A010A
015A
025A
030A
minus3 minus15 0 15 3 45minus45Displacement (mm)
minus1500
minus1000
minus500
0
500
1000
1500Fo
rce (
kN)
(a)
000A005A010A
015A
025A030A
minus1500
minus1000
minus500
0
500
1000
1500
minus40 minus20 0 20 40 60minus60
(b)
Figure 6 Comparison between the estimated andmeasured responses of theMR damper (a) force vs displacement and (b) force vs velocity
ms
mt
Zs
Fdks
kt
Zu
Zr
Figure 7 Semiactive suspension model
Table 1 Identification results for hyperbolic tangent model usingthe DE algorithm
Parameter Value Parameter Value1198880119886 17 Ns mmminus1 120572119887 179 N1198880119887 72 Ns mmminus1 120572119888 994 N1198880119888 51 Ns mmminus1 120573 0291198960119886 67 N mmminus1 V119886 31mm sminus11198960119887 ndash854 Ns mmminus1 V119887 56 mm sminus11198960119888 ndash017 Ns mmminus1 V119888 096 mm sminus1120572119886 18 N 1198910 ndash0127 N
By applyingNewtonrsquos second law the equations governing thequarter-car model can be expressed as follows
119898119904119904 + 119896119904 (119911119904 minus 119911119906) + 119865119889 = 0 (10)
119898119904119906 + 119896119905 (119911119906 minus 119911119903) minus 119896119904 (119911119904 minus 119911119906) minus 119865119889 = 0 (11)
where 119898119904 is the sprung mass which represents the carbody 119898119906 is the unsprung mass which represents the wheelassembly 119896119904 stands for the stiffness of the suspension systemk119905 is the primary stiffness 119911119904 is the displacement of thesprung mass 119911119906 is the displacement of the sprung mass 119911119903represents the road excitation 119865119889 stands for the controllableforce produced by the MR damper The parameter values forthe quarter-car model are determined 119898119904=391 kg 119898119906=507kg 119896119904= 60000 Nm and 119896119905= 181000 Nm
42 Improved Fuzzy Control By using a fuzzy controlalgorithm with a correction factor a fuzzy controller canachieve real-time control by changing the correction factorand adjusting the control rules The principle of the fuzzycontrol algorithm with a self-set correction factor is shownin Figure 8 The improved algorithm has two key partsFirst it defines a two-dimensional fuzzy system that cantake the relative velocity (119904 minus 119906) of the suspension andthe vertical acceleration (119904) of the car body as its inputvariables with the current I of the MR damper servingas its output variable The discourse domain of the inputvariables is set as [minus1 1] The corresponding fuzzy languagecollection is NB NS ZE PS PB where each elementrepresents negative big (NB) negative small (NS) zero (ZE)positive small (PS) and positive big (PB) respectively Thediscourse domain of the output variables is set as [minus1 1]The corresponding fuzzy language collection to be taken intoaccount is S M H A trigonometricmembership functionis used for the controllerrsquos fuzzy inferenceThe fuzzy rule tableis formed as illustrated in Table 2 A detailed analysis anddescription of normal fuzzy control algorithms can found in[29 30]
The other part is the correction factor The correctionfactor 119870119888 is determined by established fuzzy rules as seen inTable 3 The bodyrsquos vertical acceleration 119904 and the relativevelocity of the suspension 119904 minus 119906 are taken as the input
6 Mathematical Problems in Engineering
Clarification
Quarter MRsuspension
Normal fuzzyrules and fuzzy
inference
Clarification
Quantizationfactor I
Quantizationfactor II
Quantizationfactor II
Quantizationfactor III
Current Izs
zs minus zu
zs minus zu
zs
Fuzzy rules andfuzzy inference forcorrection factor
Kc
Kc
Kf ScalingFactorKi
Figure 8 Block diagram for fuzzy control algorithm with a correction factor
Table 2 Fuzzy control rules
119868 119904 minus 119906NB NS ZE PS PB
119904NB S S H H HNS S S M M MZE M S S S SPS M M S S SPB H H H S L
Table 3 Fuzzy rules for correction factor
119870119888 119904 minus 119906NB NS ZE PS PB
119904NB PB PM PS ZR ZRNS PM PS ZR ZR ZRZE PS ZR ZR ZR PSPS ZE ZR ZR PS PMPB ZE ZR PS PM PB
Table 4 RMS value of the system responses
Evaluation index Passive Fuzzy Improved fuzzyBody accelerationmsdotsminus2 10837 05458 04044Suspension deflectionm 00100 00041 00036Tyre displacementm 00042 00026 00020
language variables The correction factor is multiplied bythe scale factor of the fuzzy controller mentioned above Bychanging the value of the correction factor 119870119888 according tothe adjustment of the scale factor the output force of the MRdamper will be changed to enhance the adaptability of thesemiactive suspension system to road excitation
43 Numerical Simulations In this section we report on thenumerical simulations of theMRcontrollable suspension sys-tem as described in Section 41 The simulations are carriedout usingMatlabSimulinkTheMRdampermodel describedin Section 3 is also employed in the simulation Actual time-domain road displacement input is simulated using the power
minus4
minus2
0
2
4
Body
acce
lera
tion
(mM
2)
42 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 9 Body acceleration response under random road input
spectrum density of road roughness according to [31] whichis defined as
119903 (119905) = minus2120587119891119885119903 (119905) + 2120587radic119866119902 (1198990) 120592120596 (119905) (12)
where 119885119903(119905) is random road excitation input 119891 is the cut-off frequency in space domain 119866119902(1198990) is the coefficient ofroad roughness and set as 256times10minus6 m3 in the C-level roadcondition and 120592 is the vehicle speed and set as 50 msAnalyses of the body acceleration suspension deflection andtire displacement under random road input are presentedin Figures 9ndash11 and summarized in Table 4 It is clearlyobserved that the controlled MR suspension with both thefuzzy controller and the improved fuzzy controller produce asuperior damping performance to the passive suspension Forthe body acceleration and tire displacement the improvedfuzzy controller generates better results than the ordinaryfuzzy controller It also performed slightly better for thesuspension deflection
Mathematical Problems in Engineering 7
minus0024
minus0016
minus0008
0
0008
0016
0024
Susp
ensio
n de
flect
ion
(m)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 10 Suspension deflection under random road input
minus0012
minus0008
minus0004
0
0004
0008
0012
Tyre
disp
lace
men
t (m
)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 11 Tyre displacement under random road input
Body acceleration is the primary indicator for evaluatingthe ride comfort of a vehicle [32] According to the vibrationstandard ISO 2631 ride comfort can be evaluated by using theroot mean square of the weighed acceleration of a vehiclersquosbody The RMS value is also calculated for the suspensiondeflection and tire displacement As depicted inTable 4 whencompared to passive suspension adoption of fuzzy controlwith the correction factor and traditional fuzzy controllead to 627 and 496 reduction in body acceleration a640 and 590 reduction in suspension deflection and a542 and 381 reduction in tire displacement respectivelyAdditionally when compared to traditional fuzzy controlsemiactive suspension using fuzzy control with a correctionfactor produces a better damping effect indicating that useof the correction factor enhances the adaptability of thecontroller
5 Conclusions
In this study a shear-valve mode magnetorheological (MR)damper is developed to improve the vibration suppression invehicle suspension systems The hyperbolic tangent model isestablished to describe the performance of the MR damperbased on experimental data generated when the damper wassubjected to sinusoidal excitation Moreover a sensitivityanalysis for each parameter is performed and the influenceof the various parameters on the model output is evaluatedThemodel parameters are identified by the DE algorithm andconfirmed as polynomial functions of the current Finally afuzzy control algorithm with a correction factor is applied insimulation to assess the performance of the semiactive sus-pension system with an MR damper The simulation resultsshow that the improved fuzzy controller leads to enhancethe riding comfort when compared to passive suspensionand greater adaptability under random road excitation Infurther work a bench test will be carried out to validate thesimulation results for the vibration reduction performance ofthe proposed MR damper and semiactive control strategy
Data Availability
No additional unpublished data are available
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by the Program of National NaturalScience Foundation of China (no 51675261) and by Fundingof Jiangsu Innovation Program for Graduate Education (noKYLX16 0324)
References
[1] G Z Yao F F Yap G Chen W H Li and S H Yeo ldquoMRdamper and its application for semi-active control of vehiclesuspension systemrdquo Mechatronics vol 12 no 7 pp 963ndash9732002
[2] Q-H Nguyen and S-B Choi ldquoOptimal design of MR shockabsorber and application to vehicle suspensionrdquo Smart Mate-rials and Structures vol 18 no 3 Article ID 035012 2009
[3] R S Prabakar C Sujatha and S Narayanan ldquoResponse of aquarter car model with optimal magnetorheological damperparametersrdquo Journal of Sound and Vibration vol 332 no 9 pp2191ndash2206 2013
[4] S S Sun D H Ning J Yang H Du S W Zhang andW H LildquoA seat suspensionwith a rotarymagnetorheological damper forheavy duty vehiclesrdquo SmartMaterials and Structures vol 25 no10 Article ID 105032 2016
[5] R Stanway J L Sproston and N G Stevens ldquoNon-linearmodeling of an electro-heological vibration damperrdquo Journal ofElectrostatics vol 20 no 2 pp 167ndash184 1987
[6] B F Spencer Jr S J Dyke M K Sain and J D CarlsonldquoPhenomenological model for magnetorheological dampersrdquo
8 Mathematical Problems in Engineering
Journal of Engineering Mechanics vol 123 no 3 pp 230ndash2381997
[7] N Aguirre F Ikhouane J Rodellar and R ChristensonldquoParametric identification of the Dahl model for large scale MRdamperrdquo Structural Control and Health Monitoring vol 19 no3 pp 332ndash347 2012
[8] F Yang R Sedaghati and E Esmailzadeh ldquoDevelopment ofLuGre friction model for large-scale magneto-rheological fluiddampersrdquo Journal of Intelligent Material Systems and Structuresvol 20 no 15 pp 923ndash937 2009
[9] K C Schurter and P N Roschke ldquoFuzzy modeling of amagnetorheological damper using ANFISrdquo in Proceedings of the9th IEEE International Conference on Fuzzy Systems (FUZZ-IEEE rsquo00) vol 1 pp 122ndash127 IEEE San Antonio Tex USA2000
[10] S Guo S Yang and C Pan ldquoDynamic modeling of magne-torheological damper behaviorsrdquo Journal of Intelligent MaterialSystems and Structures vol 17 no 1 pp 3ndash14 2006
[11] Z Jiang andR Christenson ldquoA comparison of 200 kNmagneto-rheological damper models for use in real-time hybrid simula-tion pretestingrdquo Smart Materials and Structures vol 20 no 62011
[12] NMKwokQ PHa THNguyen J Li and B Samali ldquoA novelhysteretic model for magnetorheological fluid damper andparameter identification using particle swarm optimizationrdquoSensors and Actuators A Physical vol 132 no 2 pp 441ndash4512006
[13] D Karnopp M J Crosby and R A Harwood ldquoVibrationcontrol using semi-active force generatorsrdquo ASME Journal ofEngineering for Industry vol 96 no 2 pp 619ndash626 1974
[14] S Fergani L Menhour O Sename L Dugard and B DrsquoAndreaNovel ldquoA new LPVHinfin semi-active suspension control strat-egy with performance adaptation to roll behavior based on nonlinear algebraic road profile estimationrdquo in Proceedings of the52nd IEEE Conference on Decision and Control CDC rsquo13 pp3511ndash3516 Florence Italy 2013
[15] Z Zhang H R Karimi H Huang and K G RobbersmyrldquoVibration control of a semiactive vehicle suspension systembased on extended state observer techniquesrdquo Journal of AppliedMathematics vol 2014 Article ID 248297 10 pages 2014
[16] M Rashid M Hussain and N Rahim ldquoSemi-active carsuspension controller design using fuzzy-logic techniquerdquo inProceedings of the Conference on Research and DevelopmentStudent Conference on Research and Development SCOReD rsquo02pp 149ndash152 Shah Alam Malaysia 2002
[17] MM Rashid N A RahimM A Hussain andM A RahmanldquoAnalysis and experimental study of magnetorheological-baseddamper for semiactive suspension system using fuzzy hybridsrdquoIEEE Transactions on Industry Applications vol 47 no 2 pp1051ndash1059 2011
[18] A Shojaei H Metered S Shojaei and S O Oyadiji ldquoTheo-retical and experimental investigation of magneto-rheologicaldamper based semiactive suspension systemsrdquo InternationalJournal of Vehicle Structures and Systems vol 5 no 3-4 pp 109ndash120 2013
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control - Part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57 pp 288ndash301 2015
[20] R A Sharifan A Roshan M Aflatoni Ajahedi and M Zol-ghadr ldquoUncertainty and sensitivity analysis of SWMMmodel in
computation of manhole water depth and subcatchment peakfloodrdquo in Proceedings of the 6th International Conference onSensitivity Analysis of Model Output SAMO rsquo10 pp 7739-7740Italy July 2010
[21] MDMorris ldquoFactorial sampling plans for preliminary compu-tational experimentsrdquo Technometrics vol 33 no 2 pp 161ndash1741991
[22] I N Moghaddam Z Salami and L Easter ldquoSensitivity analysisof an excitation system in order to simplify and validatedynamic model utilizing plant test datardquo IEEE Transactions onIndustry Applications vol 51 no 4 pp 3435ndash3441 2015
[23] DHChoKHChu andE YKim ldquoA critical assessment of theuse of a surface reaction rate equation to correlate biosorptionkineticsrdquo International Journal of Environmental Science andTechnology vol 12 no 6 pp 1ndash10 2015
[24] R Storn and K Price ldquoDifferential evolution a simple and effi-cient heuristic scheme for global optimization over continuosspacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[25] F Neri and V Tirronen ldquoRecent advances in differential evolu-tion a survey and experimental analysisrdquo Artificial IntelligenceReview vol 33 no 1-2 pp 61ndash106 2010
[26] KWang XWang JWang et al ldquoSolving parameter identifica-tion problem of nonlinear systems using differential evolutionalgorithmrdquo in Proceedings of the 2nd International Symposiumon Intelligent Information Technology Application IITA rsquo08 pp687ndash691 China 2008
[27] S J Dyke B F Spencer Jr M K Sain and J D CarlsonldquoModeling and control of magnetorheological dampers forseismic response reductionrdquo Smart Materials and Structuresvol 5 no 5 pp 565ndash575 1996
[28] Y Yu Y Li J Li and X Gu ldquoA hysteresis model for dynamicbehaviour of magnetorheological elastomer base isolatorrdquoSmartMaterials and Structures vol 25 no 5 Article ID 0550292016
[29] E H Mamdani ldquoApplication of fuzzy algorithms for control ofsimple dynamic plantsrdquo Proceedings of the IEEE vol 121 no 12pp 1585ndash1588 1974
[30] M Laoufi and A Eskandarian ldquoFuzzy logic control for activesuspension of a non-linear full-vehicle modelrdquo in Proceedingsof the IEEE Intelligent Vehicles Symposium pp 677ndash684 XirsquoanChina 2009
[31] Z Yonglin and Z Jiafan ldquoNumerical simulation of stochasticroad process using white noise filtrationrdquo Mechanical Systemsand Signal Processing vol 20 no 2 pp 363ndash372 2006
[32] I Karen N Kaya F Ozturk I Korkmaz M Yildizhan andA Yurttac ldquoA design tool to evaluate the vehicle ride comfortcharacteristics modeling physical testing and analysisrdquo TheInternational Journal of Advanced Manufacturing Technologyvol 60 no 5-8 pp 755ndash763 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 3
Piston Rod
EM Coil
Seal
Piston
Cylinder
(a) (b)
Figure 1 Experimental MR damper (a) schematic (b) prototype
The MR damper
Test platform
Hydraulic actuator
DC power supply
The data collection and processing system
Figure 2 Experimental setup
can be considered as a quantitative expression of parametersensitivity Firstly one model parameter is specified andthe output response of hyperbolic tangent model will besolved under the condition that the value of the parameteris gradually changed Then the result will be compared withthe model output response obtained from the reference valueof this parameter to evaluate the influence of the modelparameter on the model output The formula for calculatingthe sensitivity coefficient is as follows
119864 = 1119873 [119873sum119894=1
119865119894 minus 1198651015840119894 ]12
(5)
where 119865119894 is the damping force obtained by substituting thereference values of the parameters into the MR dampermodel 1198651015840119894 refers to the variable parameters substituted intothe corresponding damping force obtained by the model Nis the number of sampling points
In this study correlation between the various parametersin the model was not considered This meant that theother parameters could be fixed while the sensitivity of asingle parameter was examined The reference values of theparameters in the hyperbolic tangent model were defined as
follows 120572 = 1100233 120573 = 00774 V = 74899 1198880 = 16751 1198960= -11821 1198910 = 13044 This set of values is obtained by fittingmeasured responses of the MR damper in which the currentis chosen as 0A and the excitation frequency and amplitudeare 2 Hz and 4 mm respectively The possible variation rangeof a single parameter in thismodel wasplusmn50 of the referencevalues
Figure 5 depicts the sensitivity of each parameter inthe hyperbolic model As can be seen the sensitivity ofparameters 120572 and 1198880 is the greatest with it increasing as therange of variation ranges increases When 120573 decreases orincreases by the same magnitude the effect of the incrementin the value of 120573 upon the model is larger than that ofa decrease in the value 120573 The sensitivity values for theother parameters are less than 01 which means they are notsensitive to the output force of the model
33 Parameter Identification andValidation Once amechan-ical model is utilized to describe the dynamic characteristicsof anMR damper properly themodelrsquos parameters have to beestimatedThedifferential evolution (DE) algorithm is a novelparallel stochastic optimization method that has attractedlots of attention in recent years [24 25] In comparison toother evolutionary algorithms the DE algorithm has certaindisadvantages in terms of optimization and search speed Ituses real number encoding with a difference-based simplemutation operation and a survival strategy of one-to-onecompetition thus reducing the complexity of the geneticmanipulation The optimization process of DE algorithminvolves three basic operations mutation crossover andselection Initially a group of the random initialized popu-lation can be generated in the feasible solution space of anoptimization problem Furthermore through mutation andcrossover operations new individuals would be generated toform new generations Finally the selection operation canbe performed on the individuals among the two populationsto retain the best individuals for the next population Theentire implementation process of the algorithm is performedas described in [26] In this work the control parameters usedin the DE algorithm are given by the maximum number of
4 Mathematical Problems in Engineering
000A
005A010A
015A
025A
030A
minus1500
minus1000
minus500
0
500
1000
1500Fo
rce (
N)
minus3 minus15 0 15 3 45minus45Displacement (mm)
(a)
000A005A010A
015A
025A030A
minus40 minus20 0 20 40 60minus60Velocity (mms)
minus1500
minus1000
minus500
0
500
1000
1500
Forc
e (N
)
(b)
Figure 3 Measured hysteretic curves of the MR damper under different currents (a) force vs displacement and (b) force vs velocity
Hysteresis
Spring
Dashpot
Damping force
Displacement
Figure 4 Schematic of hyperbolic tangent model
evolutionary generations 119873119875 = 400 the crossover factor CR= 08 and the mutation scale factor F=05
Figure 6 depicts a comparison between the measuredresponses (denoted by the solid line) and estimated responses(denoted by the dotted line) for the experimentalMR damperaccording to different currents The excitation frequencyand amplitude for these tests were 2 Hz and 4 mm Theparameters of the hyperbolic tangent model are representedas a polynomial function relationship of input current 119894 andare as follows [6 27 28]
1198880 = 11988801198861198942 + 1198880119887119894 + 1198880119888 (6)
1198960 = 11989601198861198942 + 1198960119887119894 + 1198960119888 (7)
120572 = 120572a1198942 + 120572119887119894 + 120572119888 (8)
V = V1198861198942 + V119887119894 + V119888 (9)
0 50minus50 minus25 25Variation range of model parameters ()
0
05
1
15
2
25
3
E
]
C0k0f0
Figure 5 Influence of each parameter on the response of hyperbolictangent model
The values for the identification parameters of the hyperbolictangent model at various current levels are listed in Table 1
4 Controller Formulation
41 Quarter-Car Suspension Model with MR Damper Priorto executing the semiactive control algorithm a typicalquarter-car model with an MR damper was established (seeFigure 7) This model is known to be able to reflect theessential characteristics of a real vehicle suspension system
Mathematical Problems in Engineering 5
000A
005A010A
015A
025A
030A
minus3 minus15 0 15 3 45minus45Displacement (mm)
minus1500
minus1000
minus500
0
500
1000
1500Fo
rce (
kN)
(a)
000A005A010A
015A
025A030A
minus1500
minus1000
minus500
0
500
1000
1500
minus40 minus20 0 20 40 60minus60
(b)
Figure 6 Comparison between the estimated andmeasured responses of theMR damper (a) force vs displacement and (b) force vs velocity
ms
mt
Zs
Fdks
kt
Zu
Zr
Figure 7 Semiactive suspension model
Table 1 Identification results for hyperbolic tangent model usingthe DE algorithm
Parameter Value Parameter Value1198880119886 17 Ns mmminus1 120572119887 179 N1198880119887 72 Ns mmminus1 120572119888 994 N1198880119888 51 Ns mmminus1 120573 0291198960119886 67 N mmminus1 V119886 31mm sminus11198960119887 ndash854 Ns mmminus1 V119887 56 mm sminus11198960119888 ndash017 Ns mmminus1 V119888 096 mm sminus1120572119886 18 N 1198910 ndash0127 N
By applyingNewtonrsquos second law the equations governing thequarter-car model can be expressed as follows
119898119904119904 + 119896119904 (119911119904 minus 119911119906) + 119865119889 = 0 (10)
119898119904119906 + 119896119905 (119911119906 minus 119911119903) minus 119896119904 (119911119904 minus 119911119906) minus 119865119889 = 0 (11)
where 119898119904 is the sprung mass which represents the carbody 119898119906 is the unsprung mass which represents the wheelassembly 119896119904 stands for the stiffness of the suspension systemk119905 is the primary stiffness 119911119904 is the displacement of thesprung mass 119911119906 is the displacement of the sprung mass 119911119903represents the road excitation 119865119889 stands for the controllableforce produced by the MR damper The parameter values forthe quarter-car model are determined 119898119904=391 kg 119898119906=507kg 119896119904= 60000 Nm and 119896119905= 181000 Nm
42 Improved Fuzzy Control By using a fuzzy controlalgorithm with a correction factor a fuzzy controller canachieve real-time control by changing the correction factorand adjusting the control rules The principle of the fuzzycontrol algorithm with a self-set correction factor is shownin Figure 8 The improved algorithm has two key partsFirst it defines a two-dimensional fuzzy system that cantake the relative velocity (119904 minus 119906) of the suspension andthe vertical acceleration (119904) of the car body as its inputvariables with the current I of the MR damper servingas its output variable The discourse domain of the inputvariables is set as [minus1 1] The corresponding fuzzy languagecollection is NB NS ZE PS PB where each elementrepresents negative big (NB) negative small (NS) zero (ZE)positive small (PS) and positive big (PB) respectively Thediscourse domain of the output variables is set as [minus1 1]The corresponding fuzzy language collection to be taken intoaccount is S M H A trigonometricmembership functionis used for the controllerrsquos fuzzy inferenceThe fuzzy rule tableis formed as illustrated in Table 2 A detailed analysis anddescription of normal fuzzy control algorithms can found in[29 30]
The other part is the correction factor The correctionfactor 119870119888 is determined by established fuzzy rules as seen inTable 3 The bodyrsquos vertical acceleration 119904 and the relativevelocity of the suspension 119904 minus 119906 are taken as the input
6 Mathematical Problems in Engineering
Clarification
Quarter MRsuspension
Normal fuzzyrules and fuzzy
inference
Clarification
Quantizationfactor I
Quantizationfactor II
Quantizationfactor II
Quantizationfactor III
Current Izs
zs minus zu
zs minus zu
zs
Fuzzy rules andfuzzy inference forcorrection factor
Kc
Kc
Kf ScalingFactorKi
Figure 8 Block diagram for fuzzy control algorithm with a correction factor
Table 2 Fuzzy control rules
119868 119904 minus 119906NB NS ZE PS PB
119904NB S S H H HNS S S M M MZE M S S S SPS M M S S SPB H H H S L
Table 3 Fuzzy rules for correction factor
119870119888 119904 minus 119906NB NS ZE PS PB
119904NB PB PM PS ZR ZRNS PM PS ZR ZR ZRZE PS ZR ZR ZR PSPS ZE ZR ZR PS PMPB ZE ZR PS PM PB
Table 4 RMS value of the system responses
Evaluation index Passive Fuzzy Improved fuzzyBody accelerationmsdotsminus2 10837 05458 04044Suspension deflectionm 00100 00041 00036Tyre displacementm 00042 00026 00020
language variables The correction factor is multiplied bythe scale factor of the fuzzy controller mentioned above Bychanging the value of the correction factor 119870119888 according tothe adjustment of the scale factor the output force of the MRdamper will be changed to enhance the adaptability of thesemiactive suspension system to road excitation
43 Numerical Simulations In this section we report on thenumerical simulations of theMRcontrollable suspension sys-tem as described in Section 41 The simulations are carriedout usingMatlabSimulinkTheMRdampermodel describedin Section 3 is also employed in the simulation Actual time-domain road displacement input is simulated using the power
minus4
minus2
0
2
4
Body
acce
lera
tion
(mM
2)
42 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 9 Body acceleration response under random road input
spectrum density of road roughness according to [31] whichis defined as
119903 (119905) = minus2120587119891119885119903 (119905) + 2120587radic119866119902 (1198990) 120592120596 (119905) (12)
where 119885119903(119905) is random road excitation input 119891 is the cut-off frequency in space domain 119866119902(1198990) is the coefficient ofroad roughness and set as 256times10minus6 m3 in the C-level roadcondition and 120592 is the vehicle speed and set as 50 msAnalyses of the body acceleration suspension deflection andtire displacement under random road input are presentedin Figures 9ndash11 and summarized in Table 4 It is clearlyobserved that the controlled MR suspension with both thefuzzy controller and the improved fuzzy controller produce asuperior damping performance to the passive suspension Forthe body acceleration and tire displacement the improvedfuzzy controller generates better results than the ordinaryfuzzy controller It also performed slightly better for thesuspension deflection
Mathematical Problems in Engineering 7
minus0024
minus0016
minus0008
0
0008
0016
0024
Susp
ensio
n de
flect
ion
(m)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 10 Suspension deflection under random road input
minus0012
minus0008
minus0004
0
0004
0008
0012
Tyre
disp
lace
men
t (m
)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 11 Tyre displacement under random road input
Body acceleration is the primary indicator for evaluatingthe ride comfort of a vehicle [32] According to the vibrationstandard ISO 2631 ride comfort can be evaluated by using theroot mean square of the weighed acceleration of a vehiclersquosbody The RMS value is also calculated for the suspensiondeflection and tire displacement As depicted inTable 4 whencompared to passive suspension adoption of fuzzy controlwith the correction factor and traditional fuzzy controllead to 627 and 496 reduction in body acceleration a640 and 590 reduction in suspension deflection and a542 and 381 reduction in tire displacement respectivelyAdditionally when compared to traditional fuzzy controlsemiactive suspension using fuzzy control with a correctionfactor produces a better damping effect indicating that useof the correction factor enhances the adaptability of thecontroller
5 Conclusions
In this study a shear-valve mode magnetorheological (MR)damper is developed to improve the vibration suppression invehicle suspension systems The hyperbolic tangent model isestablished to describe the performance of the MR damperbased on experimental data generated when the damper wassubjected to sinusoidal excitation Moreover a sensitivityanalysis for each parameter is performed and the influenceof the various parameters on the model output is evaluatedThemodel parameters are identified by the DE algorithm andconfirmed as polynomial functions of the current Finally afuzzy control algorithm with a correction factor is applied insimulation to assess the performance of the semiactive sus-pension system with an MR damper The simulation resultsshow that the improved fuzzy controller leads to enhancethe riding comfort when compared to passive suspensionand greater adaptability under random road excitation Infurther work a bench test will be carried out to validate thesimulation results for the vibration reduction performance ofthe proposed MR damper and semiactive control strategy
Data Availability
No additional unpublished data are available
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by the Program of National NaturalScience Foundation of China (no 51675261) and by Fundingof Jiangsu Innovation Program for Graduate Education (noKYLX16 0324)
References
[1] G Z Yao F F Yap G Chen W H Li and S H Yeo ldquoMRdamper and its application for semi-active control of vehiclesuspension systemrdquo Mechatronics vol 12 no 7 pp 963ndash9732002
[2] Q-H Nguyen and S-B Choi ldquoOptimal design of MR shockabsorber and application to vehicle suspensionrdquo Smart Mate-rials and Structures vol 18 no 3 Article ID 035012 2009
[3] R S Prabakar C Sujatha and S Narayanan ldquoResponse of aquarter car model with optimal magnetorheological damperparametersrdquo Journal of Sound and Vibration vol 332 no 9 pp2191ndash2206 2013
[4] S S Sun D H Ning J Yang H Du S W Zhang andW H LildquoA seat suspensionwith a rotarymagnetorheological damper forheavy duty vehiclesrdquo SmartMaterials and Structures vol 25 no10 Article ID 105032 2016
[5] R Stanway J L Sproston and N G Stevens ldquoNon-linearmodeling of an electro-heological vibration damperrdquo Journal ofElectrostatics vol 20 no 2 pp 167ndash184 1987
[6] B F Spencer Jr S J Dyke M K Sain and J D CarlsonldquoPhenomenological model for magnetorheological dampersrdquo
8 Mathematical Problems in Engineering
Journal of Engineering Mechanics vol 123 no 3 pp 230ndash2381997
[7] N Aguirre F Ikhouane J Rodellar and R ChristensonldquoParametric identification of the Dahl model for large scale MRdamperrdquo Structural Control and Health Monitoring vol 19 no3 pp 332ndash347 2012
[8] F Yang R Sedaghati and E Esmailzadeh ldquoDevelopment ofLuGre friction model for large-scale magneto-rheological fluiddampersrdquo Journal of Intelligent Material Systems and Structuresvol 20 no 15 pp 923ndash937 2009
[9] K C Schurter and P N Roschke ldquoFuzzy modeling of amagnetorheological damper using ANFISrdquo in Proceedings of the9th IEEE International Conference on Fuzzy Systems (FUZZ-IEEE rsquo00) vol 1 pp 122ndash127 IEEE San Antonio Tex USA2000
[10] S Guo S Yang and C Pan ldquoDynamic modeling of magne-torheological damper behaviorsrdquo Journal of Intelligent MaterialSystems and Structures vol 17 no 1 pp 3ndash14 2006
[11] Z Jiang andR Christenson ldquoA comparison of 200 kNmagneto-rheological damper models for use in real-time hybrid simula-tion pretestingrdquo Smart Materials and Structures vol 20 no 62011
[12] NMKwokQ PHa THNguyen J Li and B Samali ldquoA novelhysteretic model for magnetorheological fluid damper andparameter identification using particle swarm optimizationrdquoSensors and Actuators A Physical vol 132 no 2 pp 441ndash4512006
[13] D Karnopp M J Crosby and R A Harwood ldquoVibrationcontrol using semi-active force generatorsrdquo ASME Journal ofEngineering for Industry vol 96 no 2 pp 619ndash626 1974
[14] S Fergani L Menhour O Sename L Dugard and B DrsquoAndreaNovel ldquoA new LPVHinfin semi-active suspension control strat-egy with performance adaptation to roll behavior based on nonlinear algebraic road profile estimationrdquo in Proceedings of the52nd IEEE Conference on Decision and Control CDC rsquo13 pp3511ndash3516 Florence Italy 2013
[15] Z Zhang H R Karimi H Huang and K G RobbersmyrldquoVibration control of a semiactive vehicle suspension systembased on extended state observer techniquesrdquo Journal of AppliedMathematics vol 2014 Article ID 248297 10 pages 2014
[16] M Rashid M Hussain and N Rahim ldquoSemi-active carsuspension controller design using fuzzy-logic techniquerdquo inProceedings of the Conference on Research and DevelopmentStudent Conference on Research and Development SCOReD rsquo02pp 149ndash152 Shah Alam Malaysia 2002
[17] MM Rashid N A RahimM A Hussain andM A RahmanldquoAnalysis and experimental study of magnetorheological-baseddamper for semiactive suspension system using fuzzy hybridsrdquoIEEE Transactions on Industry Applications vol 47 no 2 pp1051ndash1059 2011
[18] A Shojaei H Metered S Shojaei and S O Oyadiji ldquoTheo-retical and experimental investigation of magneto-rheologicaldamper based semiactive suspension systemsrdquo InternationalJournal of Vehicle Structures and Systems vol 5 no 3-4 pp 109ndash120 2013
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control - Part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57 pp 288ndash301 2015
[20] R A Sharifan A Roshan M Aflatoni Ajahedi and M Zol-ghadr ldquoUncertainty and sensitivity analysis of SWMMmodel in
computation of manhole water depth and subcatchment peakfloodrdquo in Proceedings of the 6th International Conference onSensitivity Analysis of Model Output SAMO rsquo10 pp 7739-7740Italy July 2010
[21] MDMorris ldquoFactorial sampling plans for preliminary compu-tational experimentsrdquo Technometrics vol 33 no 2 pp 161ndash1741991
[22] I N Moghaddam Z Salami and L Easter ldquoSensitivity analysisof an excitation system in order to simplify and validatedynamic model utilizing plant test datardquo IEEE Transactions onIndustry Applications vol 51 no 4 pp 3435ndash3441 2015
[23] DHChoKHChu andE YKim ldquoA critical assessment of theuse of a surface reaction rate equation to correlate biosorptionkineticsrdquo International Journal of Environmental Science andTechnology vol 12 no 6 pp 1ndash10 2015
[24] R Storn and K Price ldquoDifferential evolution a simple and effi-cient heuristic scheme for global optimization over continuosspacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[25] F Neri and V Tirronen ldquoRecent advances in differential evolu-tion a survey and experimental analysisrdquo Artificial IntelligenceReview vol 33 no 1-2 pp 61ndash106 2010
[26] KWang XWang JWang et al ldquoSolving parameter identifica-tion problem of nonlinear systems using differential evolutionalgorithmrdquo in Proceedings of the 2nd International Symposiumon Intelligent Information Technology Application IITA rsquo08 pp687ndash691 China 2008
[27] S J Dyke B F Spencer Jr M K Sain and J D CarlsonldquoModeling and control of magnetorheological dampers forseismic response reductionrdquo Smart Materials and Structuresvol 5 no 5 pp 565ndash575 1996
[28] Y Yu Y Li J Li and X Gu ldquoA hysteresis model for dynamicbehaviour of magnetorheological elastomer base isolatorrdquoSmartMaterials and Structures vol 25 no 5 Article ID 0550292016
[29] E H Mamdani ldquoApplication of fuzzy algorithms for control ofsimple dynamic plantsrdquo Proceedings of the IEEE vol 121 no 12pp 1585ndash1588 1974
[30] M Laoufi and A Eskandarian ldquoFuzzy logic control for activesuspension of a non-linear full-vehicle modelrdquo in Proceedingsof the IEEE Intelligent Vehicles Symposium pp 677ndash684 XirsquoanChina 2009
[31] Z Yonglin and Z Jiafan ldquoNumerical simulation of stochasticroad process using white noise filtrationrdquo Mechanical Systemsand Signal Processing vol 20 no 2 pp 363ndash372 2006
[32] I Karen N Kaya F Ozturk I Korkmaz M Yildizhan andA Yurttac ldquoA design tool to evaluate the vehicle ride comfortcharacteristics modeling physical testing and analysisrdquo TheInternational Journal of Advanced Manufacturing Technologyvol 60 no 5-8 pp 755ndash763 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

4 Mathematical Problems in Engineering
000A
005A010A
015A
025A
030A
minus1500
minus1000
minus500
0
500
1000
1500Fo
rce (
N)
minus3 minus15 0 15 3 45minus45Displacement (mm)
(a)
000A005A010A
015A
025A030A
minus40 minus20 0 20 40 60minus60Velocity (mms)
minus1500
minus1000
minus500
0
500
1000
1500
Forc
e (N
)
(b)
Figure 3 Measured hysteretic curves of the MR damper under different currents (a) force vs displacement and (b) force vs velocity
Hysteresis
Spring
Dashpot
Damping force
Displacement
Figure 4 Schematic of hyperbolic tangent model
evolutionary generations 119873119875 = 400 the crossover factor CR= 08 and the mutation scale factor F=05
Figure 6 depicts a comparison between the measuredresponses (denoted by the solid line) and estimated responses(denoted by the dotted line) for the experimentalMR damperaccording to different currents The excitation frequencyand amplitude for these tests were 2 Hz and 4 mm Theparameters of the hyperbolic tangent model are representedas a polynomial function relationship of input current 119894 andare as follows [6 27 28]
1198880 = 11988801198861198942 + 1198880119887119894 + 1198880119888 (6)
1198960 = 11989601198861198942 + 1198960119887119894 + 1198960119888 (7)
120572 = 120572a1198942 + 120572119887119894 + 120572119888 (8)
V = V1198861198942 + V119887119894 + V119888 (9)
0 50minus50 minus25 25Variation range of model parameters ()
0
05
1
15
2
25
3
E
]
C0k0f0
Figure 5 Influence of each parameter on the response of hyperbolictangent model
The values for the identification parameters of the hyperbolictangent model at various current levels are listed in Table 1
4 Controller Formulation
41 Quarter-Car Suspension Model with MR Damper Priorto executing the semiactive control algorithm a typicalquarter-car model with an MR damper was established (seeFigure 7) This model is known to be able to reflect theessential characteristics of a real vehicle suspension system
Mathematical Problems in Engineering 5
000A
005A010A
015A
025A
030A
minus3 minus15 0 15 3 45minus45Displacement (mm)
minus1500
minus1000
minus500
0
500
1000
1500Fo
rce (
kN)
(a)
000A005A010A
015A
025A030A
minus1500
minus1000
minus500
0
500
1000
1500
minus40 minus20 0 20 40 60minus60
(b)
Figure 6 Comparison between the estimated andmeasured responses of theMR damper (a) force vs displacement and (b) force vs velocity
ms
mt
Zs
Fdks
kt
Zu
Zr
Figure 7 Semiactive suspension model
Table 1 Identification results for hyperbolic tangent model usingthe DE algorithm
Parameter Value Parameter Value1198880119886 17 Ns mmminus1 120572119887 179 N1198880119887 72 Ns mmminus1 120572119888 994 N1198880119888 51 Ns mmminus1 120573 0291198960119886 67 N mmminus1 V119886 31mm sminus11198960119887 ndash854 Ns mmminus1 V119887 56 mm sminus11198960119888 ndash017 Ns mmminus1 V119888 096 mm sminus1120572119886 18 N 1198910 ndash0127 N
By applyingNewtonrsquos second law the equations governing thequarter-car model can be expressed as follows
119898119904119904 + 119896119904 (119911119904 minus 119911119906) + 119865119889 = 0 (10)
119898119904119906 + 119896119905 (119911119906 minus 119911119903) minus 119896119904 (119911119904 minus 119911119906) minus 119865119889 = 0 (11)
where 119898119904 is the sprung mass which represents the carbody 119898119906 is the unsprung mass which represents the wheelassembly 119896119904 stands for the stiffness of the suspension systemk119905 is the primary stiffness 119911119904 is the displacement of thesprung mass 119911119906 is the displacement of the sprung mass 119911119903represents the road excitation 119865119889 stands for the controllableforce produced by the MR damper The parameter values forthe quarter-car model are determined 119898119904=391 kg 119898119906=507kg 119896119904= 60000 Nm and 119896119905= 181000 Nm
42 Improved Fuzzy Control By using a fuzzy controlalgorithm with a correction factor a fuzzy controller canachieve real-time control by changing the correction factorand adjusting the control rules The principle of the fuzzycontrol algorithm with a self-set correction factor is shownin Figure 8 The improved algorithm has two key partsFirst it defines a two-dimensional fuzzy system that cantake the relative velocity (119904 minus 119906) of the suspension andthe vertical acceleration (119904) of the car body as its inputvariables with the current I of the MR damper servingas its output variable The discourse domain of the inputvariables is set as [minus1 1] The corresponding fuzzy languagecollection is NB NS ZE PS PB where each elementrepresents negative big (NB) negative small (NS) zero (ZE)positive small (PS) and positive big (PB) respectively Thediscourse domain of the output variables is set as [minus1 1]The corresponding fuzzy language collection to be taken intoaccount is S M H A trigonometricmembership functionis used for the controllerrsquos fuzzy inferenceThe fuzzy rule tableis formed as illustrated in Table 2 A detailed analysis anddescription of normal fuzzy control algorithms can found in[29 30]
The other part is the correction factor The correctionfactor 119870119888 is determined by established fuzzy rules as seen inTable 3 The bodyrsquos vertical acceleration 119904 and the relativevelocity of the suspension 119904 minus 119906 are taken as the input
6 Mathematical Problems in Engineering
Clarification
Quarter MRsuspension
Normal fuzzyrules and fuzzy
inference
Clarification
Quantizationfactor I
Quantizationfactor II
Quantizationfactor II
Quantizationfactor III
Current Izs
zs minus zu
zs minus zu
zs
Fuzzy rules andfuzzy inference forcorrection factor
Kc
Kc
Kf ScalingFactorKi
Figure 8 Block diagram for fuzzy control algorithm with a correction factor
Table 2 Fuzzy control rules
119868 119904 minus 119906NB NS ZE PS PB
119904NB S S H H HNS S S M M MZE M S S S SPS M M S S SPB H H H S L
Table 3 Fuzzy rules for correction factor
119870119888 119904 minus 119906NB NS ZE PS PB
119904NB PB PM PS ZR ZRNS PM PS ZR ZR ZRZE PS ZR ZR ZR PSPS ZE ZR ZR PS PMPB ZE ZR PS PM PB
Table 4 RMS value of the system responses
Evaluation index Passive Fuzzy Improved fuzzyBody accelerationmsdotsminus2 10837 05458 04044Suspension deflectionm 00100 00041 00036Tyre displacementm 00042 00026 00020
language variables The correction factor is multiplied bythe scale factor of the fuzzy controller mentioned above Bychanging the value of the correction factor 119870119888 according tothe adjustment of the scale factor the output force of the MRdamper will be changed to enhance the adaptability of thesemiactive suspension system to road excitation
43 Numerical Simulations In this section we report on thenumerical simulations of theMRcontrollable suspension sys-tem as described in Section 41 The simulations are carriedout usingMatlabSimulinkTheMRdampermodel describedin Section 3 is also employed in the simulation Actual time-domain road displacement input is simulated using the power
minus4
minus2
0
2
4
Body
acce
lera
tion
(mM
2)
42 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 9 Body acceleration response under random road input
spectrum density of road roughness according to [31] whichis defined as
119903 (119905) = minus2120587119891119885119903 (119905) + 2120587radic119866119902 (1198990) 120592120596 (119905) (12)
where 119885119903(119905) is random road excitation input 119891 is the cut-off frequency in space domain 119866119902(1198990) is the coefficient ofroad roughness and set as 256times10minus6 m3 in the C-level roadcondition and 120592 is the vehicle speed and set as 50 msAnalyses of the body acceleration suspension deflection andtire displacement under random road input are presentedin Figures 9ndash11 and summarized in Table 4 It is clearlyobserved that the controlled MR suspension with both thefuzzy controller and the improved fuzzy controller produce asuperior damping performance to the passive suspension Forthe body acceleration and tire displacement the improvedfuzzy controller generates better results than the ordinaryfuzzy controller It also performed slightly better for thesuspension deflection
Mathematical Problems in Engineering 7
minus0024
minus0016
minus0008
0
0008
0016
0024
Susp
ensio
n de
flect
ion
(m)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 10 Suspension deflection under random road input
minus0012
minus0008
minus0004
0
0004
0008
0012
Tyre
disp
lace
men
t (m
)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 11 Tyre displacement under random road input
Body acceleration is the primary indicator for evaluatingthe ride comfort of a vehicle [32] According to the vibrationstandard ISO 2631 ride comfort can be evaluated by using theroot mean square of the weighed acceleration of a vehiclersquosbody The RMS value is also calculated for the suspensiondeflection and tire displacement As depicted inTable 4 whencompared to passive suspension adoption of fuzzy controlwith the correction factor and traditional fuzzy controllead to 627 and 496 reduction in body acceleration a640 and 590 reduction in suspension deflection and a542 and 381 reduction in tire displacement respectivelyAdditionally when compared to traditional fuzzy controlsemiactive suspension using fuzzy control with a correctionfactor produces a better damping effect indicating that useof the correction factor enhances the adaptability of thecontroller
5 Conclusions
In this study a shear-valve mode magnetorheological (MR)damper is developed to improve the vibration suppression invehicle suspension systems The hyperbolic tangent model isestablished to describe the performance of the MR damperbased on experimental data generated when the damper wassubjected to sinusoidal excitation Moreover a sensitivityanalysis for each parameter is performed and the influenceof the various parameters on the model output is evaluatedThemodel parameters are identified by the DE algorithm andconfirmed as polynomial functions of the current Finally afuzzy control algorithm with a correction factor is applied insimulation to assess the performance of the semiactive sus-pension system with an MR damper The simulation resultsshow that the improved fuzzy controller leads to enhancethe riding comfort when compared to passive suspensionand greater adaptability under random road excitation Infurther work a bench test will be carried out to validate thesimulation results for the vibration reduction performance ofthe proposed MR damper and semiactive control strategy
Data Availability
No additional unpublished data are available
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by the Program of National NaturalScience Foundation of China (no 51675261) and by Fundingof Jiangsu Innovation Program for Graduate Education (noKYLX16 0324)
References
[1] G Z Yao F F Yap G Chen W H Li and S H Yeo ldquoMRdamper and its application for semi-active control of vehiclesuspension systemrdquo Mechatronics vol 12 no 7 pp 963ndash9732002
[2] Q-H Nguyen and S-B Choi ldquoOptimal design of MR shockabsorber and application to vehicle suspensionrdquo Smart Mate-rials and Structures vol 18 no 3 Article ID 035012 2009
[3] R S Prabakar C Sujatha and S Narayanan ldquoResponse of aquarter car model with optimal magnetorheological damperparametersrdquo Journal of Sound and Vibration vol 332 no 9 pp2191ndash2206 2013
[4] S S Sun D H Ning J Yang H Du S W Zhang andW H LildquoA seat suspensionwith a rotarymagnetorheological damper forheavy duty vehiclesrdquo SmartMaterials and Structures vol 25 no10 Article ID 105032 2016
[5] R Stanway J L Sproston and N G Stevens ldquoNon-linearmodeling of an electro-heological vibration damperrdquo Journal ofElectrostatics vol 20 no 2 pp 167ndash184 1987
[6] B F Spencer Jr S J Dyke M K Sain and J D CarlsonldquoPhenomenological model for magnetorheological dampersrdquo
8 Mathematical Problems in Engineering
Journal of Engineering Mechanics vol 123 no 3 pp 230ndash2381997
[7] N Aguirre F Ikhouane J Rodellar and R ChristensonldquoParametric identification of the Dahl model for large scale MRdamperrdquo Structural Control and Health Monitoring vol 19 no3 pp 332ndash347 2012
[8] F Yang R Sedaghati and E Esmailzadeh ldquoDevelopment ofLuGre friction model for large-scale magneto-rheological fluiddampersrdquo Journal of Intelligent Material Systems and Structuresvol 20 no 15 pp 923ndash937 2009
[9] K C Schurter and P N Roschke ldquoFuzzy modeling of amagnetorheological damper using ANFISrdquo in Proceedings of the9th IEEE International Conference on Fuzzy Systems (FUZZ-IEEE rsquo00) vol 1 pp 122ndash127 IEEE San Antonio Tex USA2000
[10] S Guo S Yang and C Pan ldquoDynamic modeling of magne-torheological damper behaviorsrdquo Journal of Intelligent MaterialSystems and Structures vol 17 no 1 pp 3ndash14 2006
[11] Z Jiang andR Christenson ldquoA comparison of 200 kNmagneto-rheological damper models for use in real-time hybrid simula-tion pretestingrdquo Smart Materials and Structures vol 20 no 62011
[12] NMKwokQ PHa THNguyen J Li and B Samali ldquoA novelhysteretic model for magnetorheological fluid damper andparameter identification using particle swarm optimizationrdquoSensors and Actuators A Physical vol 132 no 2 pp 441ndash4512006
[13] D Karnopp M J Crosby and R A Harwood ldquoVibrationcontrol using semi-active force generatorsrdquo ASME Journal ofEngineering for Industry vol 96 no 2 pp 619ndash626 1974
[14] S Fergani L Menhour O Sename L Dugard and B DrsquoAndreaNovel ldquoA new LPVHinfin semi-active suspension control strat-egy with performance adaptation to roll behavior based on nonlinear algebraic road profile estimationrdquo in Proceedings of the52nd IEEE Conference on Decision and Control CDC rsquo13 pp3511ndash3516 Florence Italy 2013
[15] Z Zhang H R Karimi H Huang and K G RobbersmyrldquoVibration control of a semiactive vehicle suspension systembased on extended state observer techniquesrdquo Journal of AppliedMathematics vol 2014 Article ID 248297 10 pages 2014
[16] M Rashid M Hussain and N Rahim ldquoSemi-active carsuspension controller design using fuzzy-logic techniquerdquo inProceedings of the Conference on Research and DevelopmentStudent Conference on Research and Development SCOReD rsquo02pp 149ndash152 Shah Alam Malaysia 2002
[17] MM Rashid N A RahimM A Hussain andM A RahmanldquoAnalysis and experimental study of magnetorheological-baseddamper for semiactive suspension system using fuzzy hybridsrdquoIEEE Transactions on Industry Applications vol 47 no 2 pp1051ndash1059 2011
[18] A Shojaei H Metered S Shojaei and S O Oyadiji ldquoTheo-retical and experimental investigation of magneto-rheologicaldamper based semiactive suspension systemsrdquo InternationalJournal of Vehicle Structures and Systems vol 5 no 3-4 pp 109ndash120 2013
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control - Part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57 pp 288ndash301 2015
[20] R A Sharifan A Roshan M Aflatoni Ajahedi and M Zol-ghadr ldquoUncertainty and sensitivity analysis of SWMMmodel in
computation of manhole water depth and subcatchment peakfloodrdquo in Proceedings of the 6th International Conference onSensitivity Analysis of Model Output SAMO rsquo10 pp 7739-7740Italy July 2010
[21] MDMorris ldquoFactorial sampling plans for preliminary compu-tational experimentsrdquo Technometrics vol 33 no 2 pp 161ndash1741991
[22] I N Moghaddam Z Salami and L Easter ldquoSensitivity analysisof an excitation system in order to simplify and validatedynamic model utilizing plant test datardquo IEEE Transactions onIndustry Applications vol 51 no 4 pp 3435ndash3441 2015
[23] DHChoKHChu andE YKim ldquoA critical assessment of theuse of a surface reaction rate equation to correlate biosorptionkineticsrdquo International Journal of Environmental Science andTechnology vol 12 no 6 pp 1ndash10 2015
[24] R Storn and K Price ldquoDifferential evolution a simple and effi-cient heuristic scheme for global optimization over continuosspacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[25] F Neri and V Tirronen ldquoRecent advances in differential evolu-tion a survey and experimental analysisrdquo Artificial IntelligenceReview vol 33 no 1-2 pp 61ndash106 2010
[26] KWang XWang JWang et al ldquoSolving parameter identifica-tion problem of nonlinear systems using differential evolutionalgorithmrdquo in Proceedings of the 2nd International Symposiumon Intelligent Information Technology Application IITA rsquo08 pp687ndash691 China 2008
[27] S J Dyke B F Spencer Jr M K Sain and J D CarlsonldquoModeling and control of magnetorheological dampers forseismic response reductionrdquo Smart Materials and Structuresvol 5 no 5 pp 565ndash575 1996
[28] Y Yu Y Li J Li and X Gu ldquoA hysteresis model for dynamicbehaviour of magnetorheological elastomer base isolatorrdquoSmartMaterials and Structures vol 25 no 5 Article ID 0550292016
[29] E H Mamdani ldquoApplication of fuzzy algorithms for control ofsimple dynamic plantsrdquo Proceedings of the IEEE vol 121 no 12pp 1585ndash1588 1974
[30] M Laoufi and A Eskandarian ldquoFuzzy logic control for activesuspension of a non-linear full-vehicle modelrdquo in Proceedingsof the IEEE Intelligent Vehicles Symposium pp 677ndash684 XirsquoanChina 2009
[31] Z Yonglin and Z Jiafan ldquoNumerical simulation of stochasticroad process using white noise filtrationrdquo Mechanical Systemsand Signal Processing vol 20 no 2 pp 363ndash372 2006
[32] I Karen N Kaya F Ozturk I Korkmaz M Yildizhan andA Yurttac ldquoA design tool to evaluate the vehicle ride comfortcharacteristics modeling physical testing and analysisrdquo TheInternational Journal of Advanced Manufacturing Technologyvol 60 no 5-8 pp 755ndash763 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 5
000A
005A010A
015A
025A
030A
minus3 minus15 0 15 3 45minus45Displacement (mm)
minus1500
minus1000
minus500
0
500
1000
1500Fo
rce (
kN)
(a)
000A005A010A
015A
025A030A
minus1500
minus1000
minus500
0
500
1000
1500
minus40 minus20 0 20 40 60minus60
(b)
Figure 6 Comparison between the estimated andmeasured responses of theMR damper (a) force vs displacement and (b) force vs velocity
ms
mt
Zs
Fdks
kt
Zu
Zr
Figure 7 Semiactive suspension model
Table 1 Identification results for hyperbolic tangent model usingthe DE algorithm
Parameter Value Parameter Value1198880119886 17 Ns mmminus1 120572119887 179 N1198880119887 72 Ns mmminus1 120572119888 994 N1198880119888 51 Ns mmminus1 120573 0291198960119886 67 N mmminus1 V119886 31mm sminus11198960119887 ndash854 Ns mmminus1 V119887 56 mm sminus11198960119888 ndash017 Ns mmminus1 V119888 096 mm sminus1120572119886 18 N 1198910 ndash0127 N
By applyingNewtonrsquos second law the equations governing thequarter-car model can be expressed as follows
119898119904119904 + 119896119904 (119911119904 minus 119911119906) + 119865119889 = 0 (10)
119898119904119906 + 119896119905 (119911119906 minus 119911119903) minus 119896119904 (119911119904 minus 119911119906) minus 119865119889 = 0 (11)
where 119898119904 is the sprung mass which represents the carbody 119898119906 is the unsprung mass which represents the wheelassembly 119896119904 stands for the stiffness of the suspension systemk119905 is the primary stiffness 119911119904 is the displacement of thesprung mass 119911119906 is the displacement of the sprung mass 119911119903represents the road excitation 119865119889 stands for the controllableforce produced by the MR damper The parameter values forthe quarter-car model are determined 119898119904=391 kg 119898119906=507kg 119896119904= 60000 Nm and 119896119905= 181000 Nm
42 Improved Fuzzy Control By using a fuzzy controlalgorithm with a correction factor a fuzzy controller canachieve real-time control by changing the correction factorand adjusting the control rules The principle of the fuzzycontrol algorithm with a self-set correction factor is shownin Figure 8 The improved algorithm has two key partsFirst it defines a two-dimensional fuzzy system that cantake the relative velocity (119904 minus 119906) of the suspension andthe vertical acceleration (119904) of the car body as its inputvariables with the current I of the MR damper servingas its output variable The discourse domain of the inputvariables is set as [minus1 1] The corresponding fuzzy languagecollection is NB NS ZE PS PB where each elementrepresents negative big (NB) negative small (NS) zero (ZE)positive small (PS) and positive big (PB) respectively Thediscourse domain of the output variables is set as [minus1 1]The corresponding fuzzy language collection to be taken intoaccount is S M H A trigonometricmembership functionis used for the controllerrsquos fuzzy inferenceThe fuzzy rule tableis formed as illustrated in Table 2 A detailed analysis anddescription of normal fuzzy control algorithms can found in[29 30]
The other part is the correction factor The correctionfactor 119870119888 is determined by established fuzzy rules as seen inTable 3 The bodyrsquos vertical acceleration 119904 and the relativevelocity of the suspension 119904 minus 119906 are taken as the input
6 Mathematical Problems in Engineering
Clarification
Quarter MRsuspension
Normal fuzzyrules and fuzzy
inference
Clarification
Quantizationfactor I
Quantizationfactor II
Quantizationfactor II
Quantizationfactor III
Current Izs
zs minus zu
zs minus zu
zs
Fuzzy rules andfuzzy inference forcorrection factor
Kc
Kc
Kf ScalingFactorKi
Figure 8 Block diagram for fuzzy control algorithm with a correction factor
Table 2 Fuzzy control rules
119868 119904 minus 119906NB NS ZE PS PB
119904NB S S H H HNS S S M M MZE M S S S SPS M M S S SPB H H H S L
Table 3 Fuzzy rules for correction factor
119870119888 119904 minus 119906NB NS ZE PS PB
119904NB PB PM PS ZR ZRNS PM PS ZR ZR ZRZE PS ZR ZR ZR PSPS ZE ZR ZR PS PMPB ZE ZR PS PM PB
Table 4 RMS value of the system responses
Evaluation index Passive Fuzzy Improved fuzzyBody accelerationmsdotsminus2 10837 05458 04044Suspension deflectionm 00100 00041 00036Tyre displacementm 00042 00026 00020
language variables The correction factor is multiplied bythe scale factor of the fuzzy controller mentioned above Bychanging the value of the correction factor 119870119888 according tothe adjustment of the scale factor the output force of the MRdamper will be changed to enhance the adaptability of thesemiactive suspension system to road excitation
43 Numerical Simulations In this section we report on thenumerical simulations of theMRcontrollable suspension sys-tem as described in Section 41 The simulations are carriedout usingMatlabSimulinkTheMRdampermodel describedin Section 3 is also employed in the simulation Actual time-domain road displacement input is simulated using the power
minus4
minus2
0
2
4
Body
acce
lera
tion
(mM
2)
42 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 9 Body acceleration response under random road input
spectrum density of road roughness according to [31] whichis defined as
119903 (119905) = minus2120587119891119885119903 (119905) + 2120587radic119866119902 (1198990) 120592120596 (119905) (12)
where 119885119903(119905) is random road excitation input 119891 is the cut-off frequency in space domain 119866119902(1198990) is the coefficient ofroad roughness and set as 256times10minus6 m3 in the C-level roadcondition and 120592 is the vehicle speed and set as 50 msAnalyses of the body acceleration suspension deflection andtire displacement under random road input are presentedin Figures 9ndash11 and summarized in Table 4 It is clearlyobserved that the controlled MR suspension with both thefuzzy controller and the improved fuzzy controller produce asuperior damping performance to the passive suspension Forthe body acceleration and tire displacement the improvedfuzzy controller generates better results than the ordinaryfuzzy controller It also performed slightly better for thesuspension deflection
Mathematical Problems in Engineering 7
minus0024
minus0016
minus0008
0
0008
0016
0024
Susp
ensio
n de
flect
ion
(m)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 10 Suspension deflection under random road input
minus0012
minus0008
minus0004
0
0004
0008
0012
Tyre
disp
lace
men
t (m
)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 11 Tyre displacement under random road input
Body acceleration is the primary indicator for evaluatingthe ride comfort of a vehicle [32] According to the vibrationstandard ISO 2631 ride comfort can be evaluated by using theroot mean square of the weighed acceleration of a vehiclersquosbody The RMS value is also calculated for the suspensiondeflection and tire displacement As depicted inTable 4 whencompared to passive suspension adoption of fuzzy controlwith the correction factor and traditional fuzzy controllead to 627 and 496 reduction in body acceleration a640 and 590 reduction in suspension deflection and a542 and 381 reduction in tire displacement respectivelyAdditionally when compared to traditional fuzzy controlsemiactive suspension using fuzzy control with a correctionfactor produces a better damping effect indicating that useof the correction factor enhances the adaptability of thecontroller
5 Conclusions
In this study a shear-valve mode magnetorheological (MR)damper is developed to improve the vibration suppression invehicle suspension systems The hyperbolic tangent model isestablished to describe the performance of the MR damperbased on experimental data generated when the damper wassubjected to sinusoidal excitation Moreover a sensitivityanalysis for each parameter is performed and the influenceof the various parameters on the model output is evaluatedThemodel parameters are identified by the DE algorithm andconfirmed as polynomial functions of the current Finally afuzzy control algorithm with a correction factor is applied insimulation to assess the performance of the semiactive sus-pension system with an MR damper The simulation resultsshow that the improved fuzzy controller leads to enhancethe riding comfort when compared to passive suspensionand greater adaptability under random road excitation Infurther work a bench test will be carried out to validate thesimulation results for the vibration reduction performance ofthe proposed MR damper and semiactive control strategy
Data Availability
No additional unpublished data are available
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by the Program of National NaturalScience Foundation of China (no 51675261) and by Fundingof Jiangsu Innovation Program for Graduate Education (noKYLX16 0324)
References
[1] G Z Yao F F Yap G Chen W H Li and S H Yeo ldquoMRdamper and its application for semi-active control of vehiclesuspension systemrdquo Mechatronics vol 12 no 7 pp 963ndash9732002
[2] Q-H Nguyen and S-B Choi ldquoOptimal design of MR shockabsorber and application to vehicle suspensionrdquo Smart Mate-rials and Structures vol 18 no 3 Article ID 035012 2009
[3] R S Prabakar C Sujatha and S Narayanan ldquoResponse of aquarter car model with optimal magnetorheological damperparametersrdquo Journal of Sound and Vibration vol 332 no 9 pp2191ndash2206 2013
[4] S S Sun D H Ning J Yang H Du S W Zhang andW H LildquoA seat suspensionwith a rotarymagnetorheological damper forheavy duty vehiclesrdquo SmartMaterials and Structures vol 25 no10 Article ID 105032 2016
[5] R Stanway J L Sproston and N G Stevens ldquoNon-linearmodeling of an electro-heological vibration damperrdquo Journal ofElectrostatics vol 20 no 2 pp 167ndash184 1987
[6] B F Spencer Jr S J Dyke M K Sain and J D CarlsonldquoPhenomenological model for magnetorheological dampersrdquo
8 Mathematical Problems in Engineering
Journal of Engineering Mechanics vol 123 no 3 pp 230ndash2381997
[7] N Aguirre F Ikhouane J Rodellar and R ChristensonldquoParametric identification of the Dahl model for large scale MRdamperrdquo Structural Control and Health Monitoring vol 19 no3 pp 332ndash347 2012
[8] F Yang R Sedaghati and E Esmailzadeh ldquoDevelopment ofLuGre friction model for large-scale magneto-rheological fluiddampersrdquo Journal of Intelligent Material Systems and Structuresvol 20 no 15 pp 923ndash937 2009
[9] K C Schurter and P N Roschke ldquoFuzzy modeling of amagnetorheological damper using ANFISrdquo in Proceedings of the9th IEEE International Conference on Fuzzy Systems (FUZZ-IEEE rsquo00) vol 1 pp 122ndash127 IEEE San Antonio Tex USA2000
[10] S Guo S Yang and C Pan ldquoDynamic modeling of magne-torheological damper behaviorsrdquo Journal of Intelligent MaterialSystems and Structures vol 17 no 1 pp 3ndash14 2006
[11] Z Jiang andR Christenson ldquoA comparison of 200 kNmagneto-rheological damper models for use in real-time hybrid simula-tion pretestingrdquo Smart Materials and Structures vol 20 no 62011
[12] NMKwokQ PHa THNguyen J Li and B Samali ldquoA novelhysteretic model for magnetorheological fluid damper andparameter identification using particle swarm optimizationrdquoSensors and Actuators A Physical vol 132 no 2 pp 441ndash4512006
[13] D Karnopp M J Crosby and R A Harwood ldquoVibrationcontrol using semi-active force generatorsrdquo ASME Journal ofEngineering for Industry vol 96 no 2 pp 619ndash626 1974
[14] S Fergani L Menhour O Sename L Dugard and B DrsquoAndreaNovel ldquoA new LPVHinfin semi-active suspension control strat-egy with performance adaptation to roll behavior based on nonlinear algebraic road profile estimationrdquo in Proceedings of the52nd IEEE Conference on Decision and Control CDC rsquo13 pp3511ndash3516 Florence Italy 2013
[15] Z Zhang H R Karimi H Huang and K G RobbersmyrldquoVibration control of a semiactive vehicle suspension systembased on extended state observer techniquesrdquo Journal of AppliedMathematics vol 2014 Article ID 248297 10 pages 2014
[16] M Rashid M Hussain and N Rahim ldquoSemi-active carsuspension controller design using fuzzy-logic techniquerdquo inProceedings of the Conference on Research and DevelopmentStudent Conference on Research and Development SCOReD rsquo02pp 149ndash152 Shah Alam Malaysia 2002
[17] MM Rashid N A RahimM A Hussain andM A RahmanldquoAnalysis and experimental study of magnetorheological-baseddamper for semiactive suspension system using fuzzy hybridsrdquoIEEE Transactions on Industry Applications vol 47 no 2 pp1051ndash1059 2011
[18] A Shojaei H Metered S Shojaei and S O Oyadiji ldquoTheo-retical and experimental investigation of magneto-rheologicaldamper based semiactive suspension systemsrdquo InternationalJournal of Vehicle Structures and Systems vol 5 no 3-4 pp 109ndash120 2013
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control - Part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57 pp 288ndash301 2015
[20] R A Sharifan A Roshan M Aflatoni Ajahedi and M Zol-ghadr ldquoUncertainty and sensitivity analysis of SWMMmodel in
computation of manhole water depth and subcatchment peakfloodrdquo in Proceedings of the 6th International Conference onSensitivity Analysis of Model Output SAMO rsquo10 pp 7739-7740Italy July 2010
[21] MDMorris ldquoFactorial sampling plans for preliminary compu-tational experimentsrdquo Technometrics vol 33 no 2 pp 161ndash1741991
[22] I N Moghaddam Z Salami and L Easter ldquoSensitivity analysisof an excitation system in order to simplify and validatedynamic model utilizing plant test datardquo IEEE Transactions onIndustry Applications vol 51 no 4 pp 3435ndash3441 2015
[23] DHChoKHChu andE YKim ldquoA critical assessment of theuse of a surface reaction rate equation to correlate biosorptionkineticsrdquo International Journal of Environmental Science andTechnology vol 12 no 6 pp 1ndash10 2015
[24] R Storn and K Price ldquoDifferential evolution a simple and effi-cient heuristic scheme for global optimization over continuosspacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[25] F Neri and V Tirronen ldquoRecent advances in differential evolu-tion a survey and experimental analysisrdquo Artificial IntelligenceReview vol 33 no 1-2 pp 61ndash106 2010
[26] KWang XWang JWang et al ldquoSolving parameter identifica-tion problem of nonlinear systems using differential evolutionalgorithmrdquo in Proceedings of the 2nd International Symposiumon Intelligent Information Technology Application IITA rsquo08 pp687ndash691 China 2008
[27] S J Dyke B F Spencer Jr M K Sain and J D CarlsonldquoModeling and control of magnetorheological dampers forseismic response reductionrdquo Smart Materials and Structuresvol 5 no 5 pp 565ndash575 1996
[28] Y Yu Y Li J Li and X Gu ldquoA hysteresis model for dynamicbehaviour of magnetorheological elastomer base isolatorrdquoSmartMaterials and Structures vol 25 no 5 Article ID 0550292016
[29] E H Mamdani ldquoApplication of fuzzy algorithms for control ofsimple dynamic plantsrdquo Proceedings of the IEEE vol 121 no 12pp 1585ndash1588 1974
[30] M Laoufi and A Eskandarian ldquoFuzzy logic control for activesuspension of a non-linear full-vehicle modelrdquo in Proceedingsof the IEEE Intelligent Vehicles Symposium pp 677ndash684 XirsquoanChina 2009
[31] Z Yonglin and Z Jiafan ldquoNumerical simulation of stochasticroad process using white noise filtrationrdquo Mechanical Systemsand Signal Processing vol 20 no 2 pp 363ndash372 2006
[32] I Karen N Kaya F Ozturk I Korkmaz M Yildizhan andA Yurttac ldquoA design tool to evaluate the vehicle ride comfortcharacteristics modeling physical testing and analysisrdquo TheInternational Journal of Advanced Manufacturing Technologyvol 60 no 5-8 pp 755ndash763 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

6 Mathematical Problems in Engineering
Clarification
Quarter MRsuspension
Normal fuzzyrules and fuzzy
inference
Clarification
Quantizationfactor I
Quantizationfactor II
Quantizationfactor II
Quantizationfactor III
Current Izs
zs minus zu
zs minus zu
zs
Fuzzy rules andfuzzy inference forcorrection factor
Kc
Kc
Kf ScalingFactorKi
Figure 8 Block diagram for fuzzy control algorithm with a correction factor
Table 2 Fuzzy control rules
119868 119904 minus 119906NB NS ZE PS PB
119904NB S S H H HNS S S M M MZE M S S S SPS M M S S SPB H H H S L
Table 3 Fuzzy rules for correction factor
119870119888 119904 minus 119906NB NS ZE PS PB
119904NB PB PM PS ZR ZRNS PM PS ZR ZR ZRZE PS ZR ZR ZR PSPS ZE ZR ZR PS PMPB ZE ZR PS PM PB
Table 4 RMS value of the system responses
Evaluation index Passive Fuzzy Improved fuzzyBody accelerationmsdotsminus2 10837 05458 04044Suspension deflectionm 00100 00041 00036Tyre displacementm 00042 00026 00020
language variables The correction factor is multiplied bythe scale factor of the fuzzy controller mentioned above Bychanging the value of the correction factor 119870119888 according tothe adjustment of the scale factor the output force of the MRdamper will be changed to enhance the adaptability of thesemiactive suspension system to road excitation
43 Numerical Simulations In this section we report on thenumerical simulations of theMRcontrollable suspension sys-tem as described in Section 41 The simulations are carriedout usingMatlabSimulinkTheMRdampermodel describedin Section 3 is also employed in the simulation Actual time-domain road displacement input is simulated using the power
minus4
minus2
0
2
4
Body
acce
lera
tion
(mM
2)
42 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 9 Body acceleration response under random road input
spectrum density of road roughness according to [31] whichis defined as
119903 (119905) = minus2120587119891119885119903 (119905) + 2120587radic119866119902 (1198990) 120592120596 (119905) (12)
where 119885119903(119905) is random road excitation input 119891 is the cut-off frequency in space domain 119866119902(1198990) is the coefficient ofroad roughness and set as 256times10minus6 m3 in the C-level roadcondition and 120592 is the vehicle speed and set as 50 msAnalyses of the body acceleration suspension deflection andtire displacement under random road input are presentedin Figures 9ndash11 and summarized in Table 4 It is clearlyobserved that the controlled MR suspension with both thefuzzy controller and the improved fuzzy controller produce asuperior damping performance to the passive suspension Forthe body acceleration and tire displacement the improvedfuzzy controller generates better results than the ordinaryfuzzy controller It also performed slightly better for thesuspension deflection
Mathematical Problems in Engineering 7
minus0024
minus0016
minus0008
0
0008
0016
0024
Susp
ensio
n de
flect
ion
(m)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 10 Suspension deflection under random road input
minus0012
minus0008
minus0004
0
0004
0008
0012
Tyre
disp
lace
men
t (m
)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 11 Tyre displacement under random road input
Body acceleration is the primary indicator for evaluatingthe ride comfort of a vehicle [32] According to the vibrationstandard ISO 2631 ride comfort can be evaluated by using theroot mean square of the weighed acceleration of a vehiclersquosbody The RMS value is also calculated for the suspensiondeflection and tire displacement As depicted inTable 4 whencompared to passive suspension adoption of fuzzy controlwith the correction factor and traditional fuzzy controllead to 627 and 496 reduction in body acceleration a640 and 590 reduction in suspension deflection and a542 and 381 reduction in tire displacement respectivelyAdditionally when compared to traditional fuzzy controlsemiactive suspension using fuzzy control with a correctionfactor produces a better damping effect indicating that useof the correction factor enhances the adaptability of thecontroller
5 Conclusions
In this study a shear-valve mode magnetorheological (MR)damper is developed to improve the vibration suppression invehicle suspension systems The hyperbolic tangent model isestablished to describe the performance of the MR damperbased on experimental data generated when the damper wassubjected to sinusoidal excitation Moreover a sensitivityanalysis for each parameter is performed and the influenceof the various parameters on the model output is evaluatedThemodel parameters are identified by the DE algorithm andconfirmed as polynomial functions of the current Finally afuzzy control algorithm with a correction factor is applied insimulation to assess the performance of the semiactive sus-pension system with an MR damper The simulation resultsshow that the improved fuzzy controller leads to enhancethe riding comfort when compared to passive suspensionand greater adaptability under random road excitation Infurther work a bench test will be carried out to validate thesimulation results for the vibration reduction performance ofthe proposed MR damper and semiactive control strategy
Data Availability
No additional unpublished data are available
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by the Program of National NaturalScience Foundation of China (no 51675261) and by Fundingof Jiangsu Innovation Program for Graduate Education (noKYLX16 0324)
References
[1] G Z Yao F F Yap G Chen W H Li and S H Yeo ldquoMRdamper and its application for semi-active control of vehiclesuspension systemrdquo Mechatronics vol 12 no 7 pp 963ndash9732002
[2] Q-H Nguyen and S-B Choi ldquoOptimal design of MR shockabsorber and application to vehicle suspensionrdquo Smart Mate-rials and Structures vol 18 no 3 Article ID 035012 2009
[3] R S Prabakar C Sujatha and S Narayanan ldquoResponse of aquarter car model with optimal magnetorheological damperparametersrdquo Journal of Sound and Vibration vol 332 no 9 pp2191ndash2206 2013
[4] S S Sun D H Ning J Yang H Du S W Zhang andW H LildquoA seat suspensionwith a rotarymagnetorheological damper forheavy duty vehiclesrdquo SmartMaterials and Structures vol 25 no10 Article ID 105032 2016
[5] R Stanway J L Sproston and N G Stevens ldquoNon-linearmodeling of an electro-heological vibration damperrdquo Journal ofElectrostatics vol 20 no 2 pp 167ndash184 1987
[6] B F Spencer Jr S J Dyke M K Sain and J D CarlsonldquoPhenomenological model for magnetorheological dampersrdquo
8 Mathematical Problems in Engineering
Journal of Engineering Mechanics vol 123 no 3 pp 230ndash2381997
[7] N Aguirre F Ikhouane J Rodellar and R ChristensonldquoParametric identification of the Dahl model for large scale MRdamperrdquo Structural Control and Health Monitoring vol 19 no3 pp 332ndash347 2012
[8] F Yang R Sedaghati and E Esmailzadeh ldquoDevelopment ofLuGre friction model for large-scale magneto-rheological fluiddampersrdquo Journal of Intelligent Material Systems and Structuresvol 20 no 15 pp 923ndash937 2009
[9] K C Schurter and P N Roschke ldquoFuzzy modeling of amagnetorheological damper using ANFISrdquo in Proceedings of the9th IEEE International Conference on Fuzzy Systems (FUZZ-IEEE rsquo00) vol 1 pp 122ndash127 IEEE San Antonio Tex USA2000
[10] S Guo S Yang and C Pan ldquoDynamic modeling of magne-torheological damper behaviorsrdquo Journal of Intelligent MaterialSystems and Structures vol 17 no 1 pp 3ndash14 2006
[11] Z Jiang andR Christenson ldquoA comparison of 200 kNmagneto-rheological damper models for use in real-time hybrid simula-tion pretestingrdquo Smart Materials and Structures vol 20 no 62011
[12] NMKwokQ PHa THNguyen J Li and B Samali ldquoA novelhysteretic model for magnetorheological fluid damper andparameter identification using particle swarm optimizationrdquoSensors and Actuators A Physical vol 132 no 2 pp 441ndash4512006
[13] D Karnopp M J Crosby and R A Harwood ldquoVibrationcontrol using semi-active force generatorsrdquo ASME Journal ofEngineering for Industry vol 96 no 2 pp 619ndash626 1974
[14] S Fergani L Menhour O Sename L Dugard and B DrsquoAndreaNovel ldquoA new LPVHinfin semi-active suspension control strat-egy with performance adaptation to roll behavior based on nonlinear algebraic road profile estimationrdquo in Proceedings of the52nd IEEE Conference on Decision and Control CDC rsquo13 pp3511ndash3516 Florence Italy 2013
[15] Z Zhang H R Karimi H Huang and K G RobbersmyrldquoVibration control of a semiactive vehicle suspension systembased on extended state observer techniquesrdquo Journal of AppliedMathematics vol 2014 Article ID 248297 10 pages 2014
[16] M Rashid M Hussain and N Rahim ldquoSemi-active carsuspension controller design using fuzzy-logic techniquerdquo inProceedings of the Conference on Research and DevelopmentStudent Conference on Research and Development SCOReD rsquo02pp 149ndash152 Shah Alam Malaysia 2002
[17] MM Rashid N A RahimM A Hussain andM A RahmanldquoAnalysis and experimental study of magnetorheological-baseddamper for semiactive suspension system using fuzzy hybridsrdquoIEEE Transactions on Industry Applications vol 47 no 2 pp1051ndash1059 2011
[18] A Shojaei H Metered S Shojaei and S O Oyadiji ldquoTheo-retical and experimental investigation of magneto-rheologicaldamper based semiactive suspension systemsrdquo InternationalJournal of Vehicle Structures and Systems vol 5 no 3-4 pp 109ndash120 2013
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control - Part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57 pp 288ndash301 2015
[20] R A Sharifan A Roshan M Aflatoni Ajahedi and M Zol-ghadr ldquoUncertainty and sensitivity analysis of SWMMmodel in
computation of manhole water depth and subcatchment peakfloodrdquo in Proceedings of the 6th International Conference onSensitivity Analysis of Model Output SAMO rsquo10 pp 7739-7740Italy July 2010
[21] MDMorris ldquoFactorial sampling plans for preliminary compu-tational experimentsrdquo Technometrics vol 33 no 2 pp 161ndash1741991
[22] I N Moghaddam Z Salami and L Easter ldquoSensitivity analysisof an excitation system in order to simplify and validatedynamic model utilizing plant test datardquo IEEE Transactions onIndustry Applications vol 51 no 4 pp 3435ndash3441 2015
[23] DHChoKHChu andE YKim ldquoA critical assessment of theuse of a surface reaction rate equation to correlate biosorptionkineticsrdquo International Journal of Environmental Science andTechnology vol 12 no 6 pp 1ndash10 2015
[24] R Storn and K Price ldquoDifferential evolution a simple and effi-cient heuristic scheme for global optimization over continuosspacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[25] F Neri and V Tirronen ldquoRecent advances in differential evolu-tion a survey and experimental analysisrdquo Artificial IntelligenceReview vol 33 no 1-2 pp 61ndash106 2010
[26] KWang XWang JWang et al ldquoSolving parameter identifica-tion problem of nonlinear systems using differential evolutionalgorithmrdquo in Proceedings of the 2nd International Symposiumon Intelligent Information Technology Application IITA rsquo08 pp687ndash691 China 2008
[27] S J Dyke B F Spencer Jr M K Sain and J D CarlsonldquoModeling and control of magnetorheological dampers forseismic response reductionrdquo Smart Materials and Structuresvol 5 no 5 pp 565ndash575 1996
[28] Y Yu Y Li J Li and X Gu ldquoA hysteresis model for dynamicbehaviour of magnetorheological elastomer base isolatorrdquoSmartMaterials and Structures vol 25 no 5 Article ID 0550292016
[29] E H Mamdani ldquoApplication of fuzzy algorithms for control ofsimple dynamic plantsrdquo Proceedings of the IEEE vol 121 no 12pp 1585ndash1588 1974
[30] M Laoufi and A Eskandarian ldquoFuzzy logic control for activesuspension of a non-linear full-vehicle modelrdquo in Proceedingsof the IEEE Intelligent Vehicles Symposium pp 677ndash684 XirsquoanChina 2009
[31] Z Yonglin and Z Jiafan ldquoNumerical simulation of stochasticroad process using white noise filtrationrdquo Mechanical Systemsand Signal Processing vol 20 no 2 pp 363ndash372 2006
[32] I Karen N Kaya F Ozturk I Korkmaz M Yildizhan andA Yurttac ldquoA design tool to evaluate the vehicle ride comfortcharacteristics modeling physical testing and analysisrdquo TheInternational Journal of Advanced Manufacturing Technologyvol 60 no 5-8 pp 755ndash763 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Mathematical Problems in Engineering 7
minus0024
minus0016
minus0008
0
0008
0016
0024
Susp
ensio
n de
flect
ion
(m)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 10 Suspension deflection under random road input
minus0012
minus0008
minus0004
0
0004
0008
0012
Tyre
disp
lace
men
t (m
)
2 4 6 8 100Time (s)
Improved FuzzyFuzzyPassive
Figure 11 Tyre displacement under random road input
Body acceleration is the primary indicator for evaluatingthe ride comfort of a vehicle [32] According to the vibrationstandard ISO 2631 ride comfort can be evaluated by using theroot mean square of the weighed acceleration of a vehiclersquosbody The RMS value is also calculated for the suspensiondeflection and tire displacement As depicted inTable 4 whencompared to passive suspension adoption of fuzzy controlwith the correction factor and traditional fuzzy controllead to 627 and 496 reduction in body acceleration a640 and 590 reduction in suspension deflection and a542 and 381 reduction in tire displacement respectivelyAdditionally when compared to traditional fuzzy controlsemiactive suspension using fuzzy control with a correctionfactor produces a better damping effect indicating that useof the correction factor enhances the adaptability of thecontroller
5 Conclusions
In this study a shear-valve mode magnetorheological (MR)damper is developed to improve the vibration suppression invehicle suspension systems The hyperbolic tangent model isestablished to describe the performance of the MR damperbased on experimental data generated when the damper wassubjected to sinusoidal excitation Moreover a sensitivityanalysis for each parameter is performed and the influenceof the various parameters on the model output is evaluatedThemodel parameters are identified by the DE algorithm andconfirmed as polynomial functions of the current Finally afuzzy control algorithm with a correction factor is applied insimulation to assess the performance of the semiactive sus-pension system with an MR damper The simulation resultsshow that the improved fuzzy controller leads to enhancethe riding comfort when compared to passive suspensionand greater adaptability under random road excitation Infurther work a bench test will be carried out to validate thesimulation results for the vibration reduction performance ofthe proposed MR damper and semiactive control strategy
Data Availability
No additional unpublished data are available
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is supported by the Program of National NaturalScience Foundation of China (no 51675261) and by Fundingof Jiangsu Innovation Program for Graduate Education (noKYLX16 0324)
References
[1] G Z Yao F F Yap G Chen W H Li and S H Yeo ldquoMRdamper and its application for semi-active control of vehiclesuspension systemrdquo Mechatronics vol 12 no 7 pp 963ndash9732002
[2] Q-H Nguyen and S-B Choi ldquoOptimal design of MR shockabsorber and application to vehicle suspensionrdquo Smart Mate-rials and Structures vol 18 no 3 Article ID 035012 2009
[3] R S Prabakar C Sujatha and S Narayanan ldquoResponse of aquarter car model with optimal magnetorheological damperparametersrdquo Journal of Sound and Vibration vol 332 no 9 pp2191ndash2206 2013
[4] S S Sun D H Ning J Yang H Du S W Zhang andW H LildquoA seat suspensionwith a rotarymagnetorheological damper forheavy duty vehiclesrdquo SmartMaterials and Structures vol 25 no10 Article ID 105032 2016
[5] R Stanway J L Sproston and N G Stevens ldquoNon-linearmodeling of an electro-heological vibration damperrdquo Journal ofElectrostatics vol 20 no 2 pp 167ndash184 1987
[6] B F Spencer Jr S J Dyke M K Sain and J D CarlsonldquoPhenomenological model for magnetorheological dampersrdquo
8 Mathematical Problems in Engineering
Journal of Engineering Mechanics vol 123 no 3 pp 230ndash2381997
[7] N Aguirre F Ikhouane J Rodellar and R ChristensonldquoParametric identification of the Dahl model for large scale MRdamperrdquo Structural Control and Health Monitoring vol 19 no3 pp 332ndash347 2012
[8] F Yang R Sedaghati and E Esmailzadeh ldquoDevelopment ofLuGre friction model for large-scale magneto-rheological fluiddampersrdquo Journal of Intelligent Material Systems and Structuresvol 20 no 15 pp 923ndash937 2009
[9] K C Schurter and P N Roschke ldquoFuzzy modeling of amagnetorheological damper using ANFISrdquo in Proceedings of the9th IEEE International Conference on Fuzzy Systems (FUZZ-IEEE rsquo00) vol 1 pp 122ndash127 IEEE San Antonio Tex USA2000
[10] S Guo S Yang and C Pan ldquoDynamic modeling of magne-torheological damper behaviorsrdquo Journal of Intelligent MaterialSystems and Structures vol 17 no 1 pp 3ndash14 2006
[11] Z Jiang andR Christenson ldquoA comparison of 200 kNmagneto-rheological damper models for use in real-time hybrid simula-tion pretestingrdquo Smart Materials and Structures vol 20 no 62011
[12] NMKwokQ PHa THNguyen J Li and B Samali ldquoA novelhysteretic model for magnetorheological fluid damper andparameter identification using particle swarm optimizationrdquoSensors and Actuators A Physical vol 132 no 2 pp 441ndash4512006
[13] D Karnopp M J Crosby and R A Harwood ldquoVibrationcontrol using semi-active force generatorsrdquo ASME Journal ofEngineering for Industry vol 96 no 2 pp 619ndash626 1974
[14] S Fergani L Menhour O Sename L Dugard and B DrsquoAndreaNovel ldquoA new LPVHinfin semi-active suspension control strat-egy with performance adaptation to roll behavior based on nonlinear algebraic road profile estimationrdquo in Proceedings of the52nd IEEE Conference on Decision and Control CDC rsquo13 pp3511ndash3516 Florence Italy 2013
[15] Z Zhang H R Karimi H Huang and K G RobbersmyrldquoVibration control of a semiactive vehicle suspension systembased on extended state observer techniquesrdquo Journal of AppliedMathematics vol 2014 Article ID 248297 10 pages 2014
[16] M Rashid M Hussain and N Rahim ldquoSemi-active carsuspension controller design using fuzzy-logic techniquerdquo inProceedings of the Conference on Research and DevelopmentStudent Conference on Research and Development SCOReD rsquo02pp 149ndash152 Shah Alam Malaysia 2002
[17] MM Rashid N A RahimM A Hussain andM A RahmanldquoAnalysis and experimental study of magnetorheological-baseddamper for semiactive suspension system using fuzzy hybridsrdquoIEEE Transactions on Industry Applications vol 47 no 2 pp1051ndash1059 2011
[18] A Shojaei H Metered S Shojaei and S O Oyadiji ldquoTheo-retical and experimental investigation of magneto-rheologicaldamper based semiactive suspension systemsrdquo InternationalJournal of Vehicle Structures and Systems vol 5 no 3-4 pp 109ndash120 2013
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control - Part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57 pp 288ndash301 2015
[20] R A Sharifan A Roshan M Aflatoni Ajahedi and M Zol-ghadr ldquoUncertainty and sensitivity analysis of SWMMmodel in
computation of manhole water depth and subcatchment peakfloodrdquo in Proceedings of the 6th International Conference onSensitivity Analysis of Model Output SAMO rsquo10 pp 7739-7740Italy July 2010
[21] MDMorris ldquoFactorial sampling plans for preliminary compu-tational experimentsrdquo Technometrics vol 33 no 2 pp 161ndash1741991
[22] I N Moghaddam Z Salami and L Easter ldquoSensitivity analysisof an excitation system in order to simplify and validatedynamic model utilizing plant test datardquo IEEE Transactions onIndustry Applications vol 51 no 4 pp 3435ndash3441 2015
[23] DHChoKHChu andE YKim ldquoA critical assessment of theuse of a surface reaction rate equation to correlate biosorptionkineticsrdquo International Journal of Environmental Science andTechnology vol 12 no 6 pp 1ndash10 2015
[24] R Storn and K Price ldquoDifferential evolution a simple and effi-cient heuristic scheme for global optimization over continuosspacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[25] F Neri and V Tirronen ldquoRecent advances in differential evolu-tion a survey and experimental analysisrdquo Artificial IntelligenceReview vol 33 no 1-2 pp 61ndash106 2010
[26] KWang XWang JWang et al ldquoSolving parameter identifica-tion problem of nonlinear systems using differential evolutionalgorithmrdquo in Proceedings of the 2nd International Symposiumon Intelligent Information Technology Application IITA rsquo08 pp687ndash691 China 2008
[27] S J Dyke B F Spencer Jr M K Sain and J D CarlsonldquoModeling and control of magnetorheological dampers forseismic response reductionrdquo Smart Materials and Structuresvol 5 no 5 pp 565ndash575 1996
[28] Y Yu Y Li J Li and X Gu ldquoA hysteresis model for dynamicbehaviour of magnetorheological elastomer base isolatorrdquoSmartMaterials and Structures vol 25 no 5 Article ID 0550292016
[29] E H Mamdani ldquoApplication of fuzzy algorithms for control ofsimple dynamic plantsrdquo Proceedings of the IEEE vol 121 no 12pp 1585ndash1588 1974
[30] M Laoufi and A Eskandarian ldquoFuzzy logic control for activesuspension of a non-linear full-vehicle modelrdquo in Proceedingsof the IEEE Intelligent Vehicles Symposium pp 677ndash684 XirsquoanChina 2009
[31] Z Yonglin and Z Jiafan ldquoNumerical simulation of stochasticroad process using white noise filtrationrdquo Mechanical Systemsand Signal Processing vol 20 no 2 pp 363ndash372 2006
[32] I Karen N Kaya F Ozturk I Korkmaz M Yildizhan andA Yurttac ldquoA design tool to evaluate the vehicle ride comfortcharacteristics modeling physical testing and analysisrdquo TheInternational Journal of Advanced Manufacturing Technologyvol 60 no 5-8 pp 755ndash763 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

8 Mathematical Problems in Engineering
Journal of Engineering Mechanics vol 123 no 3 pp 230ndash2381997
[7] N Aguirre F Ikhouane J Rodellar and R ChristensonldquoParametric identification of the Dahl model for large scale MRdamperrdquo Structural Control and Health Monitoring vol 19 no3 pp 332ndash347 2012
[8] F Yang R Sedaghati and E Esmailzadeh ldquoDevelopment ofLuGre friction model for large-scale magneto-rheological fluiddampersrdquo Journal of Intelligent Material Systems and Structuresvol 20 no 15 pp 923ndash937 2009
[9] K C Schurter and P N Roschke ldquoFuzzy modeling of amagnetorheological damper using ANFISrdquo in Proceedings of the9th IEEE International Conference on Fuzzy Systems (FUZZ-IEEE rsquo00) vol 1 pp 122ndash127 IEEE San Antonio Tex USA2000
[10] S Guo S Yang and C Pan ldquoDynamic modeling of magne-torheological damper behaviorsrdquo Journal of Intelligent MaterialSystems and Structures vol 17 no 1 pp 3ndash14 2006
[11] Z Jiang andR Christenson ldquoA comparison of 200 kNmagneto-rheological damper models for use in real-time hybrid simula-tion pretestingrdquo Smart Materials and Structures vol 20 no 62011
[12] NMKwokQ PHa THNguyen J Li and B Samali ldquoA novelhysteretic model for magnetorheological fluid damper andparameter identification using particle swarm optimizationrdquoSensors and Actuators A Physical vol 132 no 2 pp 441ndash4512006
[13] D Karnopp M J Crosby and R A Harwood ldquoVibrationcontrol using semi-active force generatorsrdquo ASME Journal ofEngineering for Industry vol 96 no 2 pp 619ndash626 1974
[14] S Fergani L Menhour O Sename L Dugard and B DrsquoAndreaNovel ldquoA new LPVHinfin semi-active suspension control strat-egy with performance adaptation to roll behavior based on nonlinear algebraic road profile estimationrdquo in Proceedings of the52nd IEEE Conference on Decision and Control CDC rsquo13 pp3511ndash3516 Florence Italy 2013
[15] Z Zhang H R Karimi H Huang and K G RobbersmyrldquoVibration control of a semiactive vehicle suspension systembased on extended state observer techniquesrdquo Journal of AppliedMathematics vol 2014 Article ID 248297 10 pages 2014
[16] M Rashid M Hussain and N Rahim ldquoSemi-active carsuspension controller design using fuzzy-logic techniquerdquo inProceedings of the Conference on Research and DevelopmentStudent Conference on Research and Development SCOReD rsquo02pp 149ndash152 Shah Alam Malaysia 2002
[17] MM Rashid N A RahimM A Hussain andM A RahmanldquoAnalysis and experimental study of magnetorheological-baseddamper for semiactive suspension system using fuzzy hybridsrdquoIEEE Transactions on Industry Applications vol 47 no 2 pp1051ndash1059 2011
[18] A Shojaei H Metered S Shojaei and S O Oyadiji ldquoTheo-retical and experimental investigation of magneto-rheologicaldamper based semiactive suspension systemsrdquo InternationalJournal of Vehicle Structures and Systems vol 5 no 3-4 pp 109ndash120 2013
[19] S D Nguyen Q H Nguyen and S-B Choi ldquoA hybridclustering based fuzzy structure for vibration control - Part 2an application to semi-active vehicle seat-suspension systemrdquoMechanical Systems and Signal Processing vol 56-57 pp 288ndash301 2015
[20] R A Sharifan A Roshan M Aflatoni Ajahedi and M Zol-ghadr ldquoUncertainty and sensitivity analysis of SWMMmodel in
computation of manhole water depth and subcatchment peakfloodrdquo in Proceedings of the 6th International Conference onSensitivity Analysis of Model Output SAMO rsquo10 pp 7739-7740Italy July 2010
[21] MDMorris ldquoFactorial sampling plans for preliminary compu-tational experimentsrdquo Technometrics vol 33 no 2 pp 161ndash1741991
[22] I N Moghaddam Z Salami and L Easter ldquoSensitivity analysisof an excitation system in order to simplify and validatedynamic model utilizing plant test datardquo IEEE Transactions onIndustry Applications vol 51 no 4 pp 3435ndash3441 2015
[23] DHChoKHChu andE YKim ldquoA critical assessment of theuse of a surface reaction rate equation to correlate biosorptionkineticsrdquo International Journal of Environmental Science andTechnology vol 12 no 6 pp 1ndash10 2015
[24] R Storn and K Price ldquoDifferential evolution a simple and effi-cient heuristic scheme for global optimization over continuosspacesrdquo Journal of Global Optimization vol 11 no 4 pp 341ndash359 1997
[25] F Neri and V Tirronen ldquoRecent advances in differential evolu-tion a survey and experimental analysisrdquo Artificial IntelligenceReview vol 33 no 1-2 pp 61ndash106 2010
[26] KWang XWang JWang et al ldquoSolving parameter identifica-tion problem of nonlinear systems using differential evolutionalgorithmrdquo in Proceedings of the 2nd International Symposiumon Intelligent Information Technology Application IITA rsquo08 pp687ndash691 China 2008
[27] S J Dyke B F Spencer Jr M K Sain and J D CarlsonldquoModeling and control of magnetorheological dampers forseismic response reductionrdquo Smart Materials and Structuresvol 5 no 5 pp 565ndash575 1996
[28] Y Yu Y Li J Li and X Gu ldquoA hysteresis model for dynamicbehaviour of magnetorheological elastomer base isolatorrdquoSmartMaterials and Structures vol 25 no 5 Article ID 0550292016
[29] E H Mamdani ldquoApplication of fuzzy algorithms for control ofsimple dynamic plantsrdquo Proceedings of the IEEE vol 121 no 12pp 1585ndash1588 1974
[30] M Laoufi and A Eskandarian ldquoFuzzy logic control for activesuspension of a non-linear full-vehicle modelrdquo in Proceedingsof the IEEE Intelligent Vehicles Symposium pp 677ndash684 XirsquoanChina 2009
[31] Z Yonglin and Z Jiafan ldquoNumerical simulation of stochasticroad process using white noise filtrationrdquo Mechanical Systemsand Signal Processing vol 20 no 2 pp 363ndash372 2006
[32] I Karen N Kaya F Ozturk I Korkmaz M Yildizhan andA Yurttac ldquoA design tool to evaluate the vehicle ride comfortcharacteristics modeling physical testing and analysisrdquo TheInternational Journal of Advanced Manufacturing Technologyvol 60 no 5-8 pp 755ndash763 2012
Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom

Hindawiwwwhindawicom Volume 2018
MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Mathematical Problems in Engineering
Applied MathematicsJournal of
Hindawiwwwhindawicom Volume 2018
Probability and StatisticsHindawiwwwhindawicom Volume 2018
Journal of
Hindawiwwwhindawicom Volume 2018
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawiwwwhindawicom Volume 2018
OptimizationJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Engineering Mathematics
International Journal of
Hindawiwwwhindawicom Volume 2018
Operations ResearchAdvances in
Journal of
Hindawiwwwhindawicom Volume 2018
Function SpacesAbstract and Applied AnalysisHindawiwwwhindawicom Volume 2018
International Journal of Mathematics and Mathematical Sciences
Hindawiwwwhindawicom Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Hindawiwwwhindawicom Volume 2018Volume 2018
Numerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisNumerical AnalysisAdvances inAdvances in Discrete Dynamics in
Nature and SocietyHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Dierential EquationsInternational Journal of
Volume 2018
Hindawiwwwhindawicom Volume 2018
Decision SciencesAdvances in
Hindawiwwwhindawicom Volume 2018
AnalysisInternational Journal of
Hindawiwwwhindawicom Volume 2018
Stochastic AnalysisInternational Journal of
Submit your manuscripts atwwwhindawicom