Embed Size (px)
Citation preview

Modeling and Simulating SoC Field Bus Communication with SystemC-AMS
Mohamad Alassir, Julien Denoulet, Olivier Romain, Patrick Garda
Université Pierre et Marie Curie – Paris 6 – EA2385
3 Rue Galilée – B.C. 252 – 94200 Ivry sur Seine, France
Email: [email protected], [email protected], [email protected], [email protected]
ABSTRACT
This paper focuses on field bus communication modeling
based on SystemC-AMS. Nowadays, the design of
embedded systems is a key issue for the electronics
industry. Many ongoing research projects address this issue
by increasing the design abstraction level from the circuit
to the system level. However, most embedded systems
gather analog and digital electronics with embedded
processor cores running large amounts of embedded
software. Therefore, neither VHDL-AMS nor SystemC are
well-suited to model the architecture of these systems.
Most embedded systems are built out of a set of nodes
connected through field busses such as I²C or CAN. These
nodes are typically mixed analog and digital SOC,
including one or several processor cores and an array of
peripheral interfaces. In its most usual form, the node is
simply a micro-controller, connected to various sensors or
actuators. Automotive electronics provide a number of such
embedded systems.
In this paper, we show how to model the field bus
communications between the nodes of an embedded system
through the example of an I²C bus. Still, our approach is
meant to be generic and could be applied for other
protocols, for instance CAN.
After briefly summarizing the key features of the I²C
protocol, we will describe the SystemC-AMS model of an
I²C bus controller IP introduced in [1]. This model is made
of two blocks: a digital block, modeled in SystemC and
interfaced with a master microprocessor, manages the
protocol, timing and control of specific sequences while an
analog block, written in SystemC-AMS ensures the access
to the external bus and models its behavior. Then we will
show how this IP can be included into two kinds of
embedded systems nodes: on the one hand interfaced with
a 8051 micro-controller SystemC model, on the other hand
a SOC using a modeling platform.
Interfacing the controller with a 8051 micro-controller
allows us to build a basic mixed simulation platform to
execute a C compiled code and observe the resulting
commands on the analog lines of the I²C bus. To design a
SOC node model, we used the SoCLib prototyping
platform [2] to create a SoC that includes a MIPS
microprocessor, RAM memory, and a VCI interconnect
bus where we plugged our controller IP to communicate
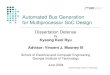
with the master. To completely validate the I²C protocol
(including multi-master arbitration), we finally connected
the MIPS to the 8051 through the I²C bus so they can
exchange data on an I²C external memory (Fig.1).
VCI
Target
MIPS RAM TTY
µC 8051
I²C RAM I²C RAM
Analog Block Analog Block Analog BlockAnalog Block
VCI BUS
I²C BUS
R
SCL
SDA
Vcc
VCI Initiator VCI Target VCI Target
I²C
Controller
I²C
Controller
I²C
MasterI²C
Master
I²CSlave
I²CSlave
SOC
IRQ
IRQ
Fig.1 – Simulation platform with SOC node & 8051 node
We’ll also present simulation speed results to evaluate
the overhead of SystemC-AMS in the global simulation.
In the Fig.1 platform (SOC + 8051), AMS simulation of
the I²C bus is performed only 10% slower than a digital-
only simulation.
REFERENCES
[1] M.Alassir, J.Denoulet, O.Romain, P.Garda :
Modelling and Simulation of an I2C Bus Controller in
SystemC-AMS, in proceedings of FDL'2006, pp.121-127,
Darmstadt, Allemagne, 19-22 Septmbre 2006
[2] SoCLIB. A modelisation & simulation plat-form
for system on chip, http://www.soclib.fr/Home.html

C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07
Modeling & Simulating SoC Field Bus Communications
with SystemC-AMS
M.Alassir, J.Denoulet, O.Romain, P.Garda
Universite P. & M. Curie, Paris, France

Context
Design of embedded systems is a key issue for the electronics industry
Most of these systems include
Analog electronics
Digital electronics
Embedded software.
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Automotive Application ExampleSet of nodes connected through a field bus
Nodes are mixed A/D SOCs, including:
Processor cores (µc, µp)
Peripheral interfaces (sensors, actuators).
MasterµP
Field Bus
Periph1
PeriphN
I/O Ctrl
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Model & Simulation
System complexity requires system-level models of platform
Simulation of A/D Hardware and Software with a single environment
SYSTEMC + SYSTEMC-AMS
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Mixed Simulation Platform
So
C
MIPS RAM TTY
Embedded
Code
VCI BUS
VCI Initiator VCI Target VCI Target
VCI Target
I²C I²C I²CController MemoryMemory
Analog Block Analog Block Analog Block
I²C BUS
Vcc
R
I²CMaster
I²CSlave
I²CSlave
Automotive Context
Generic platform
I²C Example
I²CController
8051µC
Embedded
Code
Analog Block
I²CMaster
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Outline
I²C Controller IP
Modeling Platform
Microcontroller Node
SoC Node + Microcontroller Node
Simulation Performances
Conclusion
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

I²C Protocol
Serial Transmission
2 Bidirectionnal Lines
SCL: Clock
SDA: Data
Data Frame
Address (7) R/W Data (nx8) AckS Ack Data (8) Ack P
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

I²C Controller IPMixed IP
Digital Block:
Protocol, Timing Management, Microprocessor Interface
Analog Block
External Bus Access I²C CONTROLLER
Controller
DigitalBlock
Interface
AnalogBlock
To Bus…To µP…
SYSTEMC SYSTEMC-AMS
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Digital Block Architecture
Generic Structure
3 BlocksµP Interface
FSM
Bus Interface
Modelled in
SystemC 2.1
µP Interface State-Machine Bus Interface
ADRDATA
CTRL
DATA
ADR
CTRLCTRL
FIFO
Micro
Pro
cessor
Rea
dy
Em
pty
Logic
SCL Generator
DataShift In/Out
Register
ACKManager
Start/StopManager
Free
Start
TxAdrDevice
W-ACK
Stop
G-ACK
RxDataCell
TxData
Cell
TxAdr
Cell
SDA
Request N
Request 2
Request 1
IRQ SignalIRQ
SCL
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Analog Block
I²C Specifications
Open-Drain Output
Wired-AND Function
Pull-up Resistor
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Analog BlockAnalog Interface
Output
“Transistor” model
Switch+Resistor
Capacitor
Rising/Falling Time
Input
Threshold Detection
SDF Module Modelled in SystemCAMS 0.15
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Modelling Platform – Case 1
SystemC-Model of 8051 µC
Embedded Code in Internal RAM
Interfaced with I²C Controller
I²C I²CControllerMemory
8051µC
Analog Block Analog Block
I²C BUS
Vcc
R
I²CMaster
I²CSlave
Embedded
Code
SystemC-AMS
SystemC
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Platform Simulation (1/3)Embedded code sends requests to I/O controller
Example: Byte Writing Operation
main: MOV R0, #A0
MOV A, #B4
MOVX @RO, A
MOV R0, #A0
MOV A, #4E
MOVX @RO, A
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Platform Simulation (1/3)Embedded code sends requests to I/O controller
Example: Byte Writing Operation
main: MOV R0, #A0
MOV A, #B4
MOVX @RO, A
MOV R0, #A0
MOV A, #4E
MOVX @RO, A
Slave Adress + Write Command
Cell Adress
Data Byte
Request Transmission
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Platform Simulation (2/3)Requests are processed by I/O Controller
main: MOV R0, #A0
MOV A, #B4
MOVX @RO, A
MOV R0, #A0
MOV A, #4E
MOVX @RO, A
8051 I/Os
I²C Controller I/Os
Request transmission
on 8051 output port
Data stored in
IP internal register
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Platform Simulation (3/3)Analog Behaviour of the bus lines
main: MOV R0, #A0
MOV A, #B4
MOVX @RO, A
MOV R0, #A0
MOV A, #4E
MOVX @RO, A
STA SLAVE ADRESS R/W ACK
BYTE ADRESS ACK
DATA BYTE STOPACK
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Modelling Platform – Case 2
I²C Bus
RAM1
SystemC-AMS
SOC
I²C Ctrl
Protocol Validation
Platfom features 4 nodes
2 Masters
8051 Microcontroller
MIPS-Based SOC
2 Slaves
I²C RAM
SystemC
8051µc
RAM2
I²C Ctrl
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

SoC Node
SoCLib: SoC Prototyping PlatformStarted in 2007 - 17 partners (11 academic, 6 industrial)
Based on SystemC IP Library
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

SoC Node
SoCLib: SoC Prototyping PlatformIntegration of our Controller to the IP library
Development of a VCI wrapper
MIPS Processor
RAM with embedded code
So
C
MIPS RAM TTY
Embedded
Code
VCI BUS
VCI Initiator VCI Target VCI Target
VCI Target
I²CController
Analog Block
Vcc
R
I²CMaster
I²C BUS
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Modelling Platform – Case 2
So
C
MIPS RAM TTY
Embedded
Code
VCI BUS
VCI Initiator VCI Target VCI Target
VCI Target
I²C I²C I²C I²CController ControllerMemoryMemory
8051µC
Analog Block Analog Block Analog Block Analog Block
I²C BUS
Vcc
R
I²CMaster
I²CMaster
I²CSlave
I²CSlave
Embedded
Code
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Platform Simulation (1/3)
main: MOV R0, #A0
MOV A, #B4
MOVX @RO, A
MOV R0, #A0
MOV A, #4E
MOVX @RO, A
Embedded code in MIPS & 8051
int main(void)
{
write_byte(0x50,0x57,0x69);
read_byte(0x51, 0xf1);
while (1);
return 0;
}
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07

Platform Simulation (2/3)Communication between MIPS & 8051
main: MOV R0, #A0
MOV A, #B4
MOVX @RO, A
MOV R0, #A0
MOV A, #4E
MOVX @RO, A
int main(void)
{
write_byte(0x50,0x57,0x69);
read_byte(0x51, 0xf1);
while (1);
return 0;
}
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07
Read request by MIPS
Write request by 8051
in the I²C RAM
Value stored in MIPS
IRQ signal to MIPS
Write operation on I²C busRead operation on I²C bus

Platform Simulation (3/3)Analog behaviour of the bus lines
main: MOV R0, #A0
MOV A, #B4
MOVX @RO, A
MOV R0, #A0
MOV A, #4E
MOVX @RO, A
int main(void)
{
write_byte(0x50,0x57,0x69);
read_byte(0x51, 0xf1);
while (1);
return 0;
}
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07
Read Address for MIPS
Address and data written
by 8051 in the I²C RAM
Value read in I²C bus
IRQ signal to MIPS
Write operation on I²C busRead operation on I²C bus
STA SLAVE ADRESS R/W ACK
BYTE ADRESS ACK
DATA BYTE STOPACK

Multi Master ArbitrationWired-AND function
The node at 0 takes control over the node at 1
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07
I²C bus Lines
MIPS SDACommands
8051 SDACommands
Same values sent by the two masters Arbitration won by MIPS, 8051 stops transfer
Arb
itratio
n

Conclusion
SystemC-AMS modeling platform
HW(A/D)-SW mixed simulation
Generic architecture
Appliable for other bus protocols (CAN)
Analog interface refinement
M.Alassir, J.Denoulet, O.Romain, P.Garda - C/C++-Based Modelling of Embedded Mixed-Signal Systems – Dresden – 6/25-26/07