-
Modeling Considerations for the Long-Term Generation
andTransmission Expansion Power System Planning Problem
Elliott J. Mitchell-Colgan
Dissertation submitted to the Faculty of the
Virginia Polytechnic Institute and State University
in partial fulfillment of the requirements for the degree of
Master of Science
in
Electrical Engineering
Virgilio A. Centeno, Chair
Jaime De La Ree Lopez
James S. Thorp
December 4th, 2015
Blacksburg, Virginia
Keywords: Power System Planning, Optimization, Load
Uncertainty
-
Modeling Considerations for the Long Term Generation and
TransmissionExpansion Power System Planning Problem
Elliott J. Mitchell-Colgan
(ABSTRACT)
Judicious Power System Planning ensures the adequacy of
infrastructure to support continu-
ous reliability and economy of power system operations. Planning
processes have a long and
rather successful history in the United States, but the recent
influx of unpredictable, non-
dispatchable generation such as Wind Energy Conversion Systems
(WECS) necessitates the
re-evaluation of the merit of planning methodologies in the
changing power system context.
Traditionally, planning has followed a logical progression
through generation, transmission,
reactive power, and finally auxiliary system planning using
expertise and ranking schemes.
However, it is challenging to incorporate all of the inherent
dependencies between expansion
candidates’ system impacts using these schemes. Simulation based
optimization provides a
systematic way to explore acceptable expansion plans and choose
one or several ”best” plans
while considering those complex dependencies.
Using optimization to solve the minimum-cost,
reliability-constrained Generation and Trans-
mission Expansion Problem (GTEP) is not a new concept, but the
technology is not mature.
This work inspects: load uncertainty modeling; sequential (GEP
then TEP) versus unified
(GTEP) models; and analyzes the impact on the methodologies
achieved near-optimal plan.
A sensitivity simulation on the original system and final,
upgraded system is performed.
-
Acknowledgments
The presented work benefited from the work of the Chetan Mishra,
who programmed in
MATLAB the BPSO solver used in the outer optimization, the
National Renewable Energy
Labs (NREL) who made publicly available the Eastern
Interconnection Wind Dataset; the
wonderful OPF solvers of MATPOWER of Power Systems Engineering
Research Center
(PSERC); the North American Electric Reliability Corporation and
Transmission Owners
who made publicly available the Transmission Availablility Data
System; and the IEEE and
members who made publicly available the IEEE 14 bus and Roy
Billington Reliability Test
Systems and data.
I would also like to thank Dr. Virgilio Centeno, Dr. James
Thorp, Dr. Jaime De La Ree,
Dr. Douglas Bish, and other professors of Virginia Tech with
whom I’ve had the pleasure of
chatting. It is interesting and often even inspiring to hear
their questions and comments in
meetings.
If I have seen further, it is by standing on the shoulders of
giants.
iii
-
Contents
Chapter 1: Introduction 1
1.1 Introduction to Power System Planning . . . . . . . . . . .
. . . . . . . . . . 1
1.2 Introduction to Wind Energy . . . . . . . . . . . . . . . .
. . . . . . . . . . 4
1.3 Motivation and Objective . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 7
1.4 Organization of this Thesis . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 7
Chapter 2: Background 9
2.0.1 Optimization and Power Systems . . . . . . . . . . . . . .
. . . . . . 9
2.1 Power System Planning . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 15
2.1.1 Load Forecasting and Uncertainty . . . . . . . . . . . . .
. . . . . . . 16
2.1.2 Generation Expansion Planning . . . . . . . . . . . . . .
. . . . . . . 17
2.1.3 Transmission Expansion Planning . . . . . . . . . . . . .
. . . . . . 20
2.2 Evaluating Reliability in Power Systems . . . . . . . . . .
. . . . . . . . . . 22
2.3 Evaluating System Cost in Power Systems . . . . . . . . . .
. . . . . . . . . 26
2.4 Operational Challenges with Wind Power . . . . . . . . . . .
. . . . . . . . 27
2.5 State of the Art GTEP . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 28
iv
-
Chapter 3: Methodology 30
3.1 Optimization Framework . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 30
3.1.1 Outer Optimization: Search for Candidate Upgrades . . . .
. . . . . 31
3.1.2 Inner Optimization Layer: Evaluating Cost and Reliability
. . . . . . 32
3.1.3 Capturing Load Uncertainty in the Optimization . . . . . .
. . . . . 36
3.2 System Reliability Constraint . . . . . . . . . . . . . . .
. . . . . . . . . . . 38
3.2.1 Reliability Models for Key Power System Components . . . .
. . . . 39
3.3 Input Data . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 44
3.3.1 Cost Modeling . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 45
3.3.2 Cost and Impedance of Transmission Upgrades . . . . . . .
. . . . . 46
3.3.3 System Load and Uncertainty . . . . . . . . . . . . . . .
. . . . . . . 47
3.3.4 Pre-selection of Candidate Upgrades . . . . . . . . . . .
. . . . . . . 50
3.4 Simulations . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . 50
3.4.1 Near-Optimal Expansion Plan . . . . . . . . . . . . . . .
. . . . . . . 50
3.4.2 Comparison of Unified GTEP and Sequential GEP and TEP . .
. . . 51
3.4.3 Sensitivity Simulation . . . . . . . . . . . . . . . . . .
. . . . . . . . 52
3.4.4 Load Uncertainty Simulation . . . . . . . . . . . . . . .
. . . . . . . 53
Chapter 4: Results 55
4.1 Benchmarking Results . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 55
4.2 Near-Optimal Expansion Plan Results . . . . . . . . . . . .
. . . . . . . . . 57
4.3 Sequential GEP and TEP Results . . . . . . . . . . . . . . .
. . . . . . . . . 60
v
-
4.4 Sensitivity Simulation Results . . . . . . . . . . . . . . .
. . . . . . . . . . . 63
4.4.1 Sensitivity About the Original System . . . . . . . . . .
. . . . . . . 63
4.4.2 Sensitivity about the Upgraded System . . . . . . . . . .
. . . . . . . 71
4.5 Load Uncertainty Simulation Results . . . . . . . . . . . .
. . . . . . . . . . 75
4.6 Concluding Remarks . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 80
Bibliography 82
Appendix A: Input Data 91
5.1 Wind Farm Data . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 91
5.2 Transmission Data . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 92
Appendix B: Results 95
vi
-
List of Figures
1.1 A simplified, typical power system. Image from All Time
Electrical [1] . . . 2
1.2 Levelized cost of energy by fuel in the United States in
2013. Image from
AWEA [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 5
1.3 Installed wind capacity and cost over time in the United
States. Image from
AWEA [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 6
2.4 A single variable nonlinear feasible region whose
optimization presents a chal-
lenge . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 11
2.5 Purely Demonstrative algorithm for solving the DCOPF . . . .
. . . . . . . 13
2.6 Capacity Outage Table for adequacy index calculation [3] . .
. . . . . . . . . 24
2.7 Basic two-state model for Frequency and Duration Method
reliability analysis.
[4]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 24
2.8 Capacity and load history for the state duration method.
Energy Not Served
is highlighted in black [4]. . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 25
2.9 The hierarchical levels of power system planning. . . . . .
. . . . . . . . . . 26
3.10 An overview of the presented algorithm showing the outer
and inner opti-
mization . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 37
3.11 All Possible Generating States according to IEEE Std
762™-2006. . . . . . . 40
vii
-
3.12 Two-State base load reliability model. . . . . . . . . . .
. . . . . . . . . . . . 41
3.13 The PJM load zones, 14 of which were used to generate the
load uncertainty
set. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 49
4.14 Convergence of the Monte Carlo reliability simulation using
the random data.
The convergence criterion were met at t = 2,000,000 hours. LOLE
values are
discarded. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 56
4.15 The IEEE 14 bus system upgraded with the results of the
GTEP. Arrows
depict reconductored lines. Green line depict new lines. No wind
farms were
selected. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 58
4.16 The selected candidate lines’ adjacent buses and binary
number representing
whether the transmission corridor is new (1) or reconductored
(0). PSO with
50 iterations and 10 particles was run. . . . . . . . . . . . .
. . . . . . . . . 59
4.17 The IEEE 14 bus system upgraded with the results of the
GTEP during the
sequential vs. unified GTEP experiment. Arrows depict
reconductored lines.
Green line depict new lines. Wind farms are shown as green
generators with
numbers depicting the number of turbines installed. . . . . . .
. . . . . . . . 61
4.18 The selected wind farms for the GEP and unified GTEP. . . .
. . . . . . . . 61
4.19 The selected candidate lines’ adjacent buses and binary
number represent-
ing whether the transmission corridor is new (1) or
reconductored (0) when
turbine cost was reduced. Selections for both the TEP and GTEP
shown. . . 62
4.20 The sensitivity of system cost to perturbations in decision
variables about
zero, plus no and all upgrade cases. Cost in USD is shown for
the minimum
and maximum aggregate load in the uncertainty set and the
forecasted load. 64
viii
-
4.21 The sensitivity of system HL2 LOLE to perturbations in
decision variables
about zero, plus no and all upgrade cases. LOLE in hours per
year is shown
for the minimum and maximum aggregate load in the uncertainty
set and the
forecasted load. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . 65
4.22 The IEEE 14 bus system bus loads used in the sensitivity
analysis, each in
MW and as a percent of the aggregate load. The minimum and
maximum
loads are those in the 1000 load uncertainty set. The mean is
the forecast load. 67
4.23 Case in which the system operating cost increases after
transmission upgrade.
The green square indicates the upgraded line, and the red oval
indicates the
congested line constraining operating cost. . . . . . . . . . .
. . . . . . . . 68
4.24 Case in which upgrading transmission line 1-5 (green
square) increases HL2
LOLE. Outages are shown with red x’s, congested lines shown with
red ovals.
Bus load outage shown with blue triangle. . . . . . . . . . . .
. . . . . . . . 70
4.25 Shown again: the IEEE 14 bus system upgraded with the
results of the GTEP
during the sequential vs. unified GTEP experiment. Arrows depict
recon-
ductored lines. Green line depict new lines. Wind farms are
shown as green
generators with numbers depicting the number of turbines
installed. . . . . . 72
4.26 The sensitivity of system cost to perturbations in decision
variables about
zero, plus no and all upgrade cases. Cost in USD is shown for
the minimum
and maximum aggregate load in the uncertainty set and the
forecasted load.
”Remove” means the line was selected in the plan, so it will be
taken out in
the sensitivity. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 73
ix
-
4.27 The sensitivity of system HL2 LOLE to perturbations in
decision variables
about zero, plus no and all upgrade cases. LOLE in hours per
year is shown
for the minimum and maximum aggregate load in the uncertainty
set and the
forecasted load. ”Remove” means the line was selected in the
plan, so it will
be taken out in the sensitivity. . . . . . . . . . . . . . . . .
. . . . . . . . . . 74
4.28 The impact of uncertainty set on system cost for the
original system. The
expected system cost did not change after 400 samples. . . . . .
. . . . . . 77
4.29 The impact of the uncertainty set on expected HL2 LOLE for
the original sys-
tem. The expected LOLE over the uncertainty set and for the mean
forecast
load are shown. . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . 78
4.30 The impact of the uncertainty set on expected operating
cost for the upgraded
system. The straight line is cost to meet the mean forecast
load. . . . . . . 79
4.31 The impact of the uncertainty set on expected HL2 LOLE for
the upgraded
system. The straight line is the LOLE for the mean forecast
load. . . . . . . 80
5.32 Data for wind farms. Weibull parameters, wind speed
parameters in m/s,
and the per-turbine MW rating. . . . . . . . . . . . . . . . . .
. . . . . . . . 91
5.33 Cost data for wind farms in USD per turbine. Turbine and
land costs are in
the first column, followed by transmission intertie costs. . . .
. . . . . . . . . 92
5.34 Reliability data for wind turbines in hours, including
capacity in MW. . . . 92
5.35 Data for Candidate lines. Impedances in per unit. MTTF and
MTTR in
hours. Capacity in MW. Cost in U.S. dollars. . . . . . . . . . .
. . . . . . . 93
5.36 Data for pre-existing lines. Impedances in per unit. MTTF
and MTTR in
hours. Capacity in MW. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . 93
5.37 Lengths for existing (estimated), and candidate lines in
miles. . . . . . . . . 94
x
-
6.38 The optimal value after each iteration of PSO. 50
iterations with 10 particles
are run, and cost converged well before the optimization
terminated. . . . . 95
6.39 An example of PSO convergence. There is one row per
particle, where each
particle is the best particle for that iteration. The first
three candidates are
wind farms, the final 22 are candidate lines. Wind farm
variables are in the
order of the bus numbers at which they are installed starting
with the lowest.
Candidate lines are in the same order and the candidate line
information. 50
iterations with 10 particles are run, and results converged long
before the last
iteration. . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . 96
xi
-
Chapter 1: Introduction
This chapter introduces and motivates the proposed work. Power
system planning and the
continued rise of wind power systems are discussed, and the
organization of this document
is described.
1.1 Introduction to Power System Planning
Electricity has become a necessity. Society relies on
electricity for: lighting; cooking; air
conditioning; the production of materials like steel; and more
recently, powering of computers
and the infrastructure of the Internet. The electric power
system, which is composed of any
infrastructure necessary to produce and deliver electricity to
consumers, has therefore become
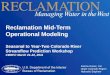
a backbone of developed nations. Figure 1.1 shows a simplified
example of an electric power
system.
Because of the importance of the service it provides, the
primary goal of the electric power
system is to provide reliable service. Because the benefits of
electric power should be available
to all people, a secondary goal is to provide economic service.
These are conflicting goals
because redundancy increases reliability, but power system
infrastructure is costly. Judicious
planning is required to ensure that appropriate infrastructure
exists to meet reliability goals
in a cost effective manner.
Electric power system reliability goals are always framed in
terms of consistency in supplying
1
-
Elliott J. Mitchell-Colgan Chapter 1. Introduction 2
Figure 1.1: A simplified, typical power system. Image from All
Time Electrical [1]
the demand. Load-driving factors including population growth,
weather, and the advent of
new, electrically-powered technologies cause demand to fluctuate
unpredictably on many
timescales from hour to hour to decade to decade. Thus, every
planning process begins with
forecasting the demand over the planning horizon. In general,
the longer the forecast, the
more uncertain the demand. Thus, the appropriate future
infrastructure itself is, to a degree,
uncertain.
Postponing the investment decision to reduce future uncertainty
is not always an acceptable
option. Economies of scale encourage the construction of large
power plants with accordingly
long lead times (on the order of several years) [5] and large
capital costs [6]. The installation
of a new transmission line can also take nearly a decade
depending on the acquisition of
right-of-way and the physical length of the transmission line
[7, 8]. For these reasons and
others (like uncertainty in availability and price of fuel
commodities), utilities are required
to provide a long-term (5-15 year) plan to help ensure the
continued reliable and economic
operation of the electrical grid [9]. Thus, long term power
system planning is important to
power system operation and by extension society as a whole.
-
Elliott J. Mitchell-Colgan Chapter 1. Introduction 3
Current trends in the United States of population growth,
decommissioning of coal plants
and aging equipment, as well as uncertainty inherent in load
forecasting, and more recently,
operational challenges with the integration of non-dispatchable
renewable energy conversion
systems suggest that additional generation and transmission
facilities need to be installed
to maintain U.S. electric system reliability at acceptable
levels. Thus generation, transmis-
sion, and reactive power expansion plans are developed and
executed [10]. These studies
involve: the selection of technologies under consideration;
selection of geographical locations
for development; assessment of additional capacity required;
evaluation of system operational
impacts; mitigation of risk due to inherent economic and
technical uncertainties associated
with the load; the provision of evidence of meeting future
regulations (especially emissions
and green energy goals); and the final selection of an expansion
plan [10, 9]. Key to evalua-
tion and comparison of infrastructure expansion options are the
power system reliability and
economic analyses. Generation Expansion Plans, Regional
Transmission Expansion Plans,
and Integrated Resource Plans (among others) detailing these and
other analyses are de-
veloped and submitted to entities overseeing electric power
systems and their adherence to
policy [11, 12, 13, 14, 10].
Considering all possibilities in large-scale power system
planning is impractical. Thus, rank-
ing schemes and optimization theory provide mathematical tools
to facilitate the expansion
plan selection process by enabling the formal and systematic
comparison of potential strate-
gies. Though an optimization framework that simultaneously
considers generation, trans-
mission, reactive power, and auxiliary device expansion planning
would theoretically give a
better investment strategy, this problem lacks tractability with
the computing power and
algorithms currently available. In addition, information
exchange between generation and
transmission entities is restricted in deregulated power system
environments. Historically,
these problems are solved sequentially in a logical
progression.
However, as coal plants retire and the number of renewable
energy conversion system inter-
connections increase, the planning practices of the past may not
be sufficient for the future.
Changes to reserve planning and generation capacity credit
evaluation practices have already
-
Elliott J. Mitchell-Colgan Chapter 1. Introduction 4
changed in some ISOs in the United States [15]. Furthermore, in
the literature, unified gen-
eration and transmission expansion planning is becoming more
prevalent [7, 16, 17, 18, 19].
Policy and improvements in technology drive the integration of
non-dispatchable systems
like utility-scale solar and Wind Energy Conversion Systems
(WECS). These systems are
inherently different than conventional fossil-fuel plants, and
require different considerations
during power system planning [20].
This work intends to enhance the existing literature by
developing expansion optimization
models to assess the importance of various model considerations
for the expansion of Wind
Energy Conversion Systems (WECS) and transmission. For a deeper
understanding of the
phenomena motivating the change to planning practice to come,
the next section elaborates
on the recent rise of wind power.
1.2 Introduction to Wind Energy
Harnessing the energy in wind to provide services to humans is
not a new concept. Even
before electric power systems, windmills were used to grind
grains or pump water. For many
decades, wind systems have provided some electric power to
off-grid consumers and the grid.
However, wind penetration has increased drastically in the last
several decades in many coun-
tries around the world including the U.S. As an energy-dense
resource with ever-decreasing
capital costs, wind receives much attention as a replacement for
a portion of our conven-
tional fossil-fuel needs and as a means to meet green energy
goals. The decrease in wind
energy costs can be understood from the following statistics:
turbine costs account for 70%
of the costs of wind farm installations, the costs decreased
almost $300/kW installed capacity
from 2009 to 2012 when prices were roughly $1940/kW. Wind Power
Purchase Agreements
decreased from between $44/MWh and $99/MWh to $31/MWh and
$84/MWh (with an
average levelized cost of $40/MWh) over the same time period
[2]. Indeed, wind is becoming
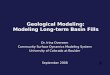
an inexpensive option overall. See Figure 1.2.
-
Elliott J. Mitchell-Colgan Chapter 1. Introduction 5
Figure 1.2: Levelized cost of energy by fuel in the United
States in 2013. Image from AWEA
[2]
Figure 1.3 below shows installed wind capacity in the United
States over the last few decades.
While expansion of WECS offers many benefits, wind is a
meteorological phenomenon largely
uncontrolled by humans. This fact in combination with electrical
energy storage’s minor role
in current power system operations [6] means that wind
integration introduces additional
uncertainty to the system energy balance. Uncertainty in the
operation of power system was
traditionally dominated by consumer-controlled changes in demand
and disturbances, now
wind-related uncertainties are becoming prominent in some grids.
The related operational
challenges with capacity reserves, voltage fluctuations,
protection systems, and markets faced
in Northern Europe, the Midwestern United States, and Texas make
it clear that wind energy
requires additional operational considerations [21, 20, 22, 23].
Because of these challenges,
solar and wind energy systems have been hot-topics in power
systems recently.
At low installed capacities relative to the load and
dispatchable generation, wind systems
can be ignored in operations and planning. Thus, power system
planning does not tradi-
-
Elliott J. Mitchell-Colgan Chapter 1. Introduction 6
Figure 1.3: Installed wind capacity and cost over time in the
United States. Image from
AWEA [2]
tionally feature as much attention to wind energy’s operational
impacts as is required in
today’s planning analyses [3]. However, today’s operational
challenges with wind will only
be exacerbated in the future when there will likely be even
higher wind power penetration
[2]. Though the industry is still learning practices to reliably
integrate a high penetration of
WECS, there are excellent works demonstrating the impacts of
WECS on system behavior
as well as possible techniques to mitigate negative impacts.
Notably, the NREL Western
Wind and Solar Integration Study completed during 2010-2014 was
so thorough and suc-
cessful that it warranted a similar study in the Eastern
Interconnection with a scheduled
completion date of Winter 2015 [21, 20].
Though the analyses necessary in systems with wind energy are
developing steadily, there
is much opportunity for research introducing these analyses into
expansion optimization
frameworks. For example, interesting would be a study which
analyzes the optimization
model considerations by impact on the optimal solution that
offers best-practices for future
expansion planning frameworks.
-
Elliott J. Mitchell-Colgan Chapter 1. Introduction 7
1.3 Motivation and Objective
The goal of this work is to demonstrate the importance of two
important modeling features
for the expansion of WECS via optimization. The use of load
uncertainty modeled as an
uncertainty set will be compared with the use of a single
forecast load. A sensitivity analysis
is performed around the initial system (future load with no
expansions) and the final load
(future load with near-optimal solution). Finally, the
sequential GEP and TEP will be
compared to the GTEP. The optimization itself results in an
selection on the total-system-
cost-optimal number and location of candidate wind farms and
transmission lines. Substation
expansion (aside from the new wind farm substations) is not
considered. Transmission
systems are simultaneously expanded in order to maintain the
hierarchical level two LOLE
at acceptable levels.
1.4 Organization of this Thesis
This thesis is organized as follows:
Chapter 1: Introduction
This chapter provides an overview of power systems, power system
planning, the rise of Wind
Energy Conversion Systems, and the motivation and goal of the
proposed methodology.
Chapter 2: Historical and State-of-the-Art Power System
Planning
This chapter describes historical approaches to power system
planning, the state of the art in
generation and transmission expansion optimization, and provides
more detailed motivation
of the proposed methodology.
-
Elliott J. Mitchell-Colgan Chapter 1. Introduction 8
Chapter 3: Proposed Methodology
This chapter provides the details of the wind, load, economic,
OPF, and adequacy models.
It includes the motivation behind, description of, and
shortcomings of use of each model.
Chapter 4: Results
This chapter contains descriptions of the experiments run and
data attained, as well as a
detailed discussion about their meaning and the utility of the
proposed methodology.
Chapter 5: Conclusions and Future Work
This chapter summarizes the lessons learned from the creation of
the proposed planning tool
and experimentation with it. The implications of the results for
electric power utilities are
discussed, and improvements that can be made are suggested.
-
Chapter 2: Background
In the previous chapter, a power system’s purpose and impact on
society was briefly de-
scribed, and long term expansion planning to incorporate wind
energy conversion systems
was motivated. This chapter delves into some background
necessary to refine the goals and
understand the methodology of this work. To that end, a brief
overview of optimization is
provided first. Then, long term generation and transmission
expansion planning (GTEP) is
discussed in the context of optimization. Reliability and cost
evaluation of power systems
is then discussed, and remarks are made about the impact of
increasing wind power pene-
tration on the GTEP processes. The background is concluded with
the state of the art in
GTEP and a note about the contribution of this work.
2.0.1 Optimization and Power Systems
Optimization is an important branch of mathematics with
widespread applications. Not
only do humans seek optimal resource allocations, paths that
minimize distances between
locations, and so forth, many natural systems function in a
manner that optimizes something.
For example, Water follows the path of least resistance
(locally). Power flows on transmission
lines to minimize power losses (heat waste).
Formal optimization dates back hundreds of years to calculus
methods called calculus of
variation. The Brachistochrone problem was posed in 1694 [24].
Iterative methods that can
be used to optimize functions were proposed by Euler, Newton,
and others in the late 1600’s
9
-
Elliott J. Mitchell-Colgan Chapter 2. Background 10
and 1700’s. However, the linear and non-linear programming
methods that are typically used
in GEP and TEP problems today were developed in the mid and late
1900’s. Building on
theory established by Kantorovich in 1939, Danzig created the
Simplex Method in 1947 [25]
that optimizes linear cost functions over linear constraints
using successive transformations
of variables. The Simplex Method, though conceived long ago, is
still very competitive for
solving general linear programming problems. Karush-Kuhn-Tucker
optimality conditions
(used to identify if a given solution is optimal or not) were an
important development in-
troduced into the literature in 1951, though their first
conception was over a decade earlier
[26]. Interior point methods, methods that search for the
optimal while always satisfy-
ing the constraints, were developed in the 1980’s [27]. Convex
relaxations (simplifications)
of non-convex feasible regions motivate iterative algorithms to
solve challenging problems.
Optimization is still a growing field, and robust optimization,
stochastic optimization, and
optimization with multiple objectives have been introduced to
the theory recently [24].
As for current capabilities of mathematical programming, linear
programming is well devel-
oped. Using a commercial Simplex-based solver, one can solve any
linear program with the
exception of very large-scale problems. For linear programming
problems, both optimality
of a solution and infeasibility can be proven [25].
In contrast, available nonlinear programming technology cannot
reliably and efficiently solve
general optimization problems. However, non-linear programming
can be broken down into
many different classes of problems, some of which can be
reliably and efficiently solved for
small and medium scale problems. Convex conic programming is an
example [28]. In convex
cases, the optimality of a solution can be proven. Many
algorithms exist in the literature
for each type of currently recognized nonlinear programming
problem. However, the algo-
rithms typically include relaxations and/or computations of
derivatives, though derivative
free methods do exist [27, 28, 25, 29].
As an example, consider Figure 2.4 which depicts a highly
nonlinear, cost function of one
variable to be maximized. The function does not appear
continuously differentiable which
-
Elliott J. Mitchell-Colgan Chapter 2. Background 11
Figure 2.4: A single variable nonlinear feasible region whose
optimization presents a challenge
poses challenges for derivative-based methods; and because of
all the local optima, it is likely
that an optimization technique will fail to find the global
optimal. We can solve this problem
visually, but constrained problems of high dimensionality are
challenging to solve visually.
This exaggerated single-variable example unconstrained
optimization problem demonstrates
the possible challenges associated with solving a problem with
hundreds or thousands of
decision variables and constraints. In power systems, the AC
Optimal Power Flow (ACOPF)
is still a field of research, though good solvers for simple
ACOPF formulations exist [30].
Stochastic programming is programming involving randomness,
either in the objective func-
tion, constraints, or solution method. Classical examples
include portfolio optimization with
uncertain returns on investment and newspaper salesmen problems
with uncertain future
demand. General stochastic programs are difficult to solve even
if they contain few vari-
ables and constraints, but if the problem has structural
properties like finitely many random
variable samples, separable, alpha-concave probabilistic
constraint functions, and linear cost
and other deterministic constraints, the programming problem is
convex and solutions can
be generated using mathematical programming techniques
relatively easily [31].
In addition to mathematical programming techniques, there are
heuristic techniques like
Particle Swarm Optimization, Genetic Algorithm, and Tabu Search
for solving non-linear
optimization problems. These techniques only require the
objective function and constraints
-
Elliott J. Mitchell-Colgan Chapter 2. Background 12
to be evaluable [25, 29], but sacrifice the nice convergence or
optimality properties as many
mathematical programming techniques. This is because such
techniques do not take ad-
vantage of the structure of the problem. Thus, they are
applicable to problems with a
wide variety of feasible region structures and cost functions,
but they present other sorts of
challenges. For example, they may be slower than other solvers
for simple problems. Fur-
thermore, many such techniques may require modification
(relaxation) of the optimization
problem of interest [32], and equality constraints may pose
challenges to generating feasible
solutions [29]. However, in practice, meta-heuristic techniques
are often powerful when it
comes to finding competitive solutions and incorporating complex
(black-box) analyses into
the optimization problems [10].
In the context of solving industry problems, robust, efficient
algorithms with convergence
properties are preferred with an understanding that relaxation
of the problem may be nec-
essary [30]. That being said, heuristic techniques are gaining
popularity in the literature
[33, 10].
Applications in Power System
In power systems research and industry today, many important
decision-making processes
use optimization. Examples include: economic dispatch, unit
commitment, optimal power
flow, minimum load curtailment, expansion plan selection,
reactive power optimization, and
network reconfiguration [33]. Because of their importance in the
proposed methodology,
optimal power flow (OPF) and minimum curtailment will be
described.
The general OPF problem essentially meets the demand while
optimizing all equipment
settings such as generator real power dispatch, voltage
set-point, transformer tap settings,
switched capacitor settings, and so on. Constrained are load bus
voltages, transmission line
flows, generator real and reactive powers, tap settings,
capacity reserves, system security,
and so on. The optimal solution usually represents a lowest cost
operation strategy for an
instance in time. Because the ISOs seeks to optimize cost [30],
the OPF is a popular way to
-
Elliott J. Mitchell-Colgan Chapter 2. Background 13
1. Import system bus data, branch data, generator cost curves,
line limit data, etc.
2. Select a set of generator real power settings
3. Solve the DC power flow, check for transmission constraint
violations.
4. If the solution is feasible, compute the cost of
operation
5. Select another set of generator real power settings
6. Repeat step 3 until stopping criteria met.
Figure 2.5: Purely Demonstrative algorithm for solving the
DCOPF
evaluate the operating cost of a system in the literature
[34].
Unfortunately, the OPF considering both real and reactive power
currently faces solution
challenges in large systems [30], Thus, ACOPF has seen limited
utility in practice [10,
33]. However, the linearized DCOPF model shows no convergence
issues. The DCOPF
is commonly used in the literature today, and is the method used
to evaluate the operation
costs in the proposed methodology.
Though the DC power flow is not iterative itself, the DCOPF is
because multiple feasible
solutions must be compared. A purely educational algorithm is
shown in Figure 2.5.
The system operating costs are assumed to be comprised of
generator fuel costs, or in a
market environment, the cost of paying for generators. In either
case, the calculation of the
operating costs is the computation of the cost to produce the
set-point power.
Traditionally, a generator cost curve is either a piece-wise
function or a second order poly-
nomial. Market bids may be a quadratic, piece-wise linear or
step function. For computa-
tional ease, wind energy systems are often assumed to have zero
operations cost, though the
author’s previous work shows an example implementation of
penalizing mis-estimation of
available wind power adapted from [35]. It should be noted that
if the generator cost curve
-
Elliott J. Mitchell-Colgan Chapter 2. Background 14
is linear (or piecewise linear), the DCOPF can be modeled as
linear (and therefore convex).
If the generator cost curve is quadratic, the DCOPF can be
modeled as a convex quadratic
program [27].
The minimum curtailment formulation considers many of the same
modeling features as the
DCOPF. The goal of minimum curtailment is to find the best plan
to shed load in order to
maintain system integrity, i.e. to preventing islanding and/or
widespread blackout.
Load may be curtailed due to real power or reactive power
deficiencies. Load curtailment to
alleviate real power deficiencies is called under-frequency load
shedding. Load curtailment
to alleviate reactive power deficiencies is called under-voltage
load shedding [36].
Minimum load curtailment optimization involves modeling
generation, the electrical network,
and demand, system stability, and ideally includes the impacts
of control actions which may
stabilize the power system. Generator capability curves and
transmission thermal and/or
stability limits are modeled. As with the OPF, an AC power flow
model would be more
realistic, and would enable under-frequency load shedding
considerations, but degrades so-
lution reliability and time. Thus, the network is often
linearized in the literature. Loads are
modeled with levels of criticality and have associated weights
or functions in the objective
function. The loads could be shed in discrete steps, or a
relaxed problem could be solved in
which load can be shed continuously [33].
A simple formulation is identical to the DCOPF except featuring
curtailment as a controllable
real power injection and the objective function as the sum of
the curtailment variables. Such
a formulation is linear (and therefore convex) [25].
Particle Swarm Optimization
One popular heuristic algorithm applied in power systems is the
Particle Swarm Optimization
(PSO) [37]. This algorithm borrows from swarm behavior (such as
the flocking of birds) as
a means to home-in on the optimal solution to a problem. The
units of the swarm, particles,
-
Elliott J. Mitchell-Colgan Chapter 2. Background 15
each have a trajectory through the solution space.
In PSO, the trajectory of the particle is decided by three
terms: an inertial term, a local
memory term, and a global memory term. The local memory term
causes particles to
explore the solution space close to that particle’s best
solution so far. The global memory
term causes particles to explore the solution space close to the
best solution of all of the
particles so far. Random number factors applied to each term
ensure that the particles can
explore the solution space adequately. The governing equation of
PSO is given below [37].
Vx = V′x + 2 ∗ rand ∗ (pbestx − presentx) + 2 ∗ rand ∗ (gbestx −
presentx)
Where Vx is the velocity of the particle, V ′x is the previous
velocity of the particle, pbest and
gbest are the best of that particle so far and the global best
solution, and rand is a random
number. The 2s are weights that could in principle be any
number, but the creator of the
method recommends a weight of 2 based on empirical tests [37]. A
single iteration of PSO
ends when the position is updated. The new position of a
particle in the solution space is
the old position plus the velocity.
Meta-heuristic techniques like PSO are popular because they are
simple to implement and
ability to explore highly non-linear feasible regions. Because
of the success of PSO in solving
other power systems problems, it was selected for a solution
method in this methodology.
2.1 Power System Planning
Power system planning predates both computers and optimization.
Thus, methodologies
have evolved from easily-performed, deterministic analyses with
large safety factors into
complex, probabilistic, and simulation-based approaches both
within and without an opti-
mization framework [3, 10].
Traditionally, long-term power system planning is performed in a
logical sequence starting
with load forecasting, moving to generation expansion,
transmission expansion, and finally
-
Elliott J. Mitchell-Colgan Chapter 2. Background 16
expansion of other supporting equipment. The load forecasting,
generation, and expansion
stages are performed to meet real power goals. Reactive power
concerns are accounted for
afterward [10, 38]. The load forecasting, generation and
transmission expansion stages will
be explained in more detail.
As a power system’s primary goal is to meet the electrical load,
load forecasting is essential
to understanding the requirements of the future power system. At
each expansion stage, the
essential questions are which technology, where, when, and how
much capacity to install to
facilitate the supplying of the electrical demand. As computing
power has increased over
the last several decades, more complex analyses have enriched
each of the planning stages,
but in practice, the sequence has generally remained unchanged
[10]. Planning according to
this logical sequence is effective with the United States’
excellent electrical power reliability
standing as testimony, but changing regulatory landscape and
generation mix in the United
States, and ever-increasing computing power suggest there is
room for improvement to the
traditional practices [10, 39, 40].
2.1.1 Load Forecasting and Uncertainty
Long-term load forecasting is the first step of long term power
system planning. Point-
estimates and confidence intervals are developed with the
purpose of defining the require-
ments of the future power system infrastructure.
The demand for geographical regions called load zones are
predicted using past load, weather,
population, and other data. Point-estimate forecasts for the
peak load of each area and for
the area loads during the total system peak (non-coincident and
coincident peak loads) are
computed [41]. However, the future load is uncertain. Thus, the
infrastructure necessary to
carry out the mission of the power system for the future load is
also uncertain. This inherent
limitation impacts the power system planner’s methodologies.
In order to account for uncertainties in the future load,
confidence intervals on the peak
-
Elliott J. Mitchell-Colgan Chapter 2. Background 17
load are constructed and used to perform adequacy studies [42,
41]. Confidence interval
construction is a useful, traditional statistical method to
attain a better understanding of
the merit of statistical estimates. Confidence intervals enable
the quantification of bounds
within which a random variable (a future load) will lie up to a
certain probability. They
are constructed using the definite integral of the random
variable’s underlying probability
distribution [43].
Parametric and non-parametric methods exist to compute
confidence intervals. In general,
parametric methods provide more information, but require the
assumption of the under-
lying probability model for the random variable. Unfortunately,
the mechanisms driving
long-term load uncertainty are complex, involving uncertainty in
population growth, tech-
nological advancements, and to some extent even weather [42].
Perhaps it is even unlikely
that the distribution of the forecast error is time invariant.
For example, the advent of the
consumer electronics caused load to increase much faster than
planners of the antecedent
decade predicted, and today there exists a threat of shifting
weather patterns. Thus, it is
difficult to generate confidence intervals in which we can have
complete faith.
However, it’s arguable that a flawed confidence interval is
better than a point estimate. Thus
confidence intervals are constructed with assumptions. For lack
of a better assumption and
for the sake of simplicity, it is popular in the literature to
approximate the error in the
load forecast as a Gaussian distributed random variable. This
involves estimating sample
standard deviation using previous load forecast and actual load
data. Another approach
used by PJM involves non-parametric confidence interval
construction using Monte Carlo
load forecast simulation via samples of load-driving data [41].
Using either method, the final
output is a set of system loads to use as inputs to expansion
planning process.
2.1.2 Generation Expansion Planning
Generation Expansion Planning (GEP) focuses on the selection of:
fuel; plant type and
capacity; construction site; and the date of first
interconnection with the grid. Traditional
-
Elliott J. Mitchell-Colgan Chapter 2. Background 18
methodologies determine the required capacity via reliability
analysis. The generation re-
quired to meet a reliability index such as the Loss of Load
Expectation (to be discussed later
in this chapter) is found. This analysis results in the capacity
required during each planning
period. Then, production simulation and investment analyses are
performed to select from
a number of different generation technologies in order to
fulfill the needed capacity expan-
sion. The reliability and production simulation studies may or
may not include transmission
network models [38].
The location of generation must also be chosen. As the number of
possible plans grows
exponentially with the number of potential sites, exhaustive
comparison of all possibilities
is nearly impossible in large systems. Thus, pre-selections are
made by systematically eval-
uating possibilities with engineering judgment. It is important
to note that not all locations
in the transmission network are appropriate for installation of
an new generating facility.
For example, a new facility can not practically be installed in
the middle of Washington DC
even though there exist several high voltage transmission
substations. For computational
and practicality reasons, pre-selection of sites in an important
step in the solution of the
GEP problem. This is good, because the problem without
pre-selection of locations has
NB solutions, where N is the number of possible upgrade
decisions per bus and B is the
number of buses. Decisions can be made using optimization or
ranking sites by cost, or
reliability [10, 38, 14]. Of the two options, optimization’s
formal, automatic search proce-
dure is perhaps better suited to comparing the merit of GEP
solutions including complex
system interdependencies of associated with installation of
multiple generators. Thus, an
optimization method is used in this work.
Any optimization problem is comprised of an objective function
to be minimized (or max-
imized), and constraints. The GEP problem often minimizes total
system costs including
investment, operations and maintenance, fuel costs, and the cost
of energy not served [10].
The constraints include reliability, reserve, emissions, fuel
availability, pollution constraints,
and constraints on the power available from each plant. An
example formulation is shown
below in Equation 2.1 (modified from [10]).
-
Elliott J. Mitchell-Colgan Chapter 2. Background 19
minimize Ctotal = Cinv + CO&M + Cfuel + CENS
subject to Cinv =T∑t=1
Ng∑i=1
aitPGiXit
Cfuel =T∑t=1
(bet +
Ng∑i=1
bitENERGYitXit
)
CO&M =T∑t=1
Ng∑i=1
citPGiXit
CENS =T∑t=1
dtENSt
(1 +Rest/100) ∗ PLt =Ng∑i=1
PGciXit + PGt ∀t = 1, . . . , T
LOLPt ≤ LOLPMAX ∀t = 1, . . . , T
FUELejt +
Ng∑i=1
FUELitENERGYitXij ∀t = 1, . . . , T
∀j ∈ Nf
POLejt +
Ng∑i=1
POLijENERGYitXit ∀t = 1, . . . , T
∀j ∈ Np
CinvXit ≤ CMAXt ∀t = 1, . . . , T
∀i ∈ GenTypes
ENERGYij ≤Ng∑i=1
HrsPerY earCAPijXijt ∀t = 1, . . . , T
∀i ∈ GenTypes
(2.1)
Where Cinv, CO&M , Cfuel, CENS are the costs for investment,
operation and maintenance,
fuel, and the energy not served, a,b,c,d are the respective
linear cost coefficients, Rest is the
-
Elliott J. Mitchell-Colgan Chapter 2. Background 20
reserve at time t, PGci is the capacity of the candidate
generator at location i, PGt and PLtare the generation and load
during period t, Xit is the investment binary decision variable
for
location i during time t, LOLP is the loss of load probability,
FUELejt and FUELjt are the
fuel of type j consumed by existing generators and the fuel type
j consumed by plant type i,
POLejt is similar, except the pollution produced. The final two
constraints ensure that the
money spent does not exceed the available investment capital and
that the generators stay
within their operating limits.
After a formulation is selected, commercial solvers can be used
to find optimal or near-
optimal solutions to the problem, i.e. produce good choices for
where, when, and what type
of generators to install.
The formulation shown above is a Mixed-Integer Non-Linear
Program MINLP. This is be-
cause it has both integer (Xij) and continuous (ENERGYit)
decision variables, and non-
linear because the integer decision variables are multiplied by
the continuous ones. It is a
combinatorial optimization problem with multiple time stages
corresponding to dispatching
periods per year. Even though the implementation shown is fairly
simple as it contains no
network constraints, only linear generator cost curves, no
security constraints, unit com-
mitment, and so on, MINLPs such as this are among the hardest
optimization problems
to solve. Fortunately, operations research has techniques to
lessen the computational bur-
den for certain structures of problems. For example, dynamic
programming can be used to
split up the problem into smaller subproblems, and branch and
bound can help us eliminate
combinations of generations that cannot produce the optimal
solution.
2.1.3 Transmission Expansion Planning
The basic question that the TEP problem attempts to answer is
where, what type, and what
capacity of transmission conductors should be installed in order
to enable the energy trans-
action between generators and load at the point of the
transition from the bulk transmission
network to the distribution systems.
-
Elliott J. Mitchell-Colgan Chapter 2. Background 21
Traditional transmission expansion planning is composed of
several screening processes with
increasing model complexity in order to narrow down candidate
upgrades. Analysis pro-
gresses from power flow linearizations of a large transmission
system model to identify cor-
ridors which have potential future flow violations to transient
analyses on key corridors and
relay coordination. Along the way, AC power flow calculations
and transmission adequacy
studies under different load scenarios are conducted in order to
identify system weaknesses
[38].
The combinations of technologies, periods of investment, and
locations make this optimiza-
tion problem very large. The pre-selection of appropriate sites
is as important in the TEP
as in the GEP problem. Fortunately, it is usually unreasonable
to build a transmission line
longer than a few hundred miles. For that reason alone, most
combinations of buses are
impractical and end-points for a single transmission line.
Without this practical limitation,
the TEP problem that would otherwise be greater than (B − 1)!T
in complexity, where B is
the number of buses and T is the number of conductor
technologies to choose from.
The transmission expansion problem can be formulated as shown
below in Equation 2.2,
taken from [10]. Unfortunately, the DC power flow precludes the
ability to set voltage
constraints.
Minimize∑i∈L
CL(xi, Len(i))
subject to∑j=1
Bij(θi − θj) = PGi − PDi ∀i ∈ n
∑j=1
bmij (θmi − θmj ) = PmGi − PDi ∀i ⊂ n ∩m ⊂ C
bij(θi − θj) ≤ PkMAX ∀(i, j) ∈ (LC ∪ LE)
bmij (θmi − θmj ) ≤ PkMAX ∀(i, j) ∈ (LC ∪ LE) ⊂ m ∈ C
(2.2)
-
Elliott J. Mitchell-Colgan Chapter 2. Background 22
Where CL is the cost of transmission investment as a function of
the location and line length,
bij is the susceptance of transmission line k, θi is the voltage
angle at bus i, PGi and PDi are
the real power generation and demand at each bus, PkMAX is the
maximum capacity of the
transmission line, LC and LE are the sets of candidate and
existing transmission lines, C is
the set of contingencies, and the superscript m indicates the
quantity after contingency m
occurs.
It should be noted that the above two formulations (2.1) and
(2.2) are each stand-alone. In
other words, the joint generation and transmission expansion
problem has a different formu-
lation than either of the ones above. The motivation for a joint
generation and transmission
expansion plan can be simply explained. Historically, the GEP is
performed, and then used
as an input to the TEP. However, the transmission infrastructure
could be the main factor
constraining the system cost and or reliability. Performing both
analyses simultaneously
more systematically balances the marginal increase in
reliability gained from investment in
the two classes of infrastructure.
Joined Generation and Transmission Expansion Planning has also
been introduced to the
literature [16, 17, 18, 19]. Yet, most of the formulations in
the literature focus on one facet of
planning, Perhaps because the size of the problems separately
can pose practical challenges
finding optimal solutions in life-sized networks.
2.2 Evaluating Reliability in Power Systems
Power system planners attempt to ensure the electrical system
meets federal, state, and
local regulations for both reliability and economy.
Traditionally, deterministic methods have
been used in order to evaluate the reliability of generation and
transmission systems. Thus
can power system planners attempt to ensure that the future
system will be capable of
meeting the load even during credible contingencies. However,
deterministic approaches,
whether analytical or simulation-based, cannot appropriately
evaluate risk because they
-
Elliott J. Mitchell-Colgan Chapter 2. Background 23
ignore the probabilistic and stochastic nature of power systems.
Expansion plans produced
using deterministic reliability approaches may be more expensive
than necessary. Today,
power system planners use probabilistic indices like Loss of
Load Expectation (LOLE) to
evaluate reliability [4].
Power system reliability can be of divided into two concepts:
adequacy and security. A
power system is said to be adequate if there exists the
necessary infrastructure to meet the
demand. That is, there is sufficient generation to meet the
demand, and there is sufficient
transmission and distribution facilities to deliver the power to
the loads without violating
any system constraints (voltage, frequency, etc.). A power
system is said to be secure if it
will be able to sustain a disturbance and attain a new
steady-state operating point within
the limits of operation, potentially through control actions
[3]. In general, adequacy metrics
are easier to compute than security indices because adequacy can
be evaluated using static
system models.
Reliability of the power system is evaluated using one or
several adequacy and security
metrics such as Loss of Load Expectation or Expected Frequency
of Load Curtailment, and
the N-1 security criterion. These metrics indicate the ability
of an existing power system to
meet the load considering the possibility of failure in the
components of the power system.
FERC mandates adequacy by stipulating an LOLE of 1 day in 10
years [44] or lower, and
security by stipulating that systems are continuously N-1 secure
[45] [46].
There are a few basic ways to compute the LOLE metric. The most
common way is the
state enumeration method using Forced Outage Rates of each
components in the model. A
capacity outage table (see Figure 2.6) is computed for each of
the system outage states with
a significant probability. Then, the capacity outage is
convolved with an array probabilities
that each load occurs to enumerate all of the significant states
of load and generation . The
probabilities of each state are computed, as well as the power
not served during each of those
states. This method is straightforward and fast, but does not
consider the temporal aspects
of forced outages [3].
-
Elliott J. Mitchell-Colgan Chapter 2. Background 24
Figure 2.6: Capacity Outage Table for adequacy index calculation
[3]
The LOLE can also be calculated using the Frequency and Duration
method. Using this
approach, generator state transition models like the one shown
in Figure 2.7 are used. State
transition times are then sampled in order to construct a
history of available generator
capacities (see Figure 2.8). With a load history, the excess
capacity history can be generated,
and the duration and severity of outages can be computed. This
method requires data that is
perhaps harder to collect, and also may be more computationally
burdensome, but facilitates
the time series modeling of power system components like WECS
[4].
Figure 2.7: Basic two-state model for Frequency and Duration
Method reliability analysis.
[4].
The process of computing the LOLE using the Frequency and
Duration method above is
essentially a Monte Carlo simulation. Random variables are
sampled, and for each set of
samples, the metric of interest is computed. As the output of a
Monte Carlo is a sample
expectation, a natural question is, ”how many samples are
necessary to achieve a certain
accuracy?”. This is often a challenging question to answer
because Monte Carlo simulation
is usually found in applications in which direct analytical
evaluation is hard or impossible.
In practice, however, stopping criteria can be used to terminate
simulations in a reasonable
-
Elliott J. Mitchell-Colgan Chapter 2. Background 25
Figure 2.8: Capacity and load history for the state duration
method. Energy Not Served is
highlighted in black [4].
fashion. An example stopping criterion applied to LOLE
calculation is a threshold on the
coefficient of variation of the estimated criterion [4]. A good
stopping criterion will terminate
the simulation when the estimated value is acceptably close to
the true value.
Power system reliability can also be broken down into several
hierarchical levels to clarify
the model boundaries of the studies. Figure 2.9 shows the
hierarchies. Hierarchical level
one involves planning using a system model comprised only of
generation and the load. The
generation and load are connected at the same bus, and
real-power adequacy metrics like
Loss of Load Expectation (LOLE) and Loss of Energy Expectation
(LOEE) are computed.
Hierarchical level two includes the transmission system as well
as the generation and load.
Reliability indices are computed for the composite system.
Hierarchical level three includes
the distribution system as well as the generation and
transmission system. Traditionally,
the distribution system is considered separately for
computational ease, and total system
reliability is computed using load-point indices [4].
The GEP problem typically focuses on the hierarchical level 1
model. The TEP problem
-
Elliott J. Mitchell-Colgan Chapter 2. Background 26
Figure 2.9: The hierarchical levels of power system
planning.
focuses on the hierarchical level 2 model, assuming that the
generation is fixed [10, 3].
Therefore, the unified problem is computed on the hierarchical
level 2 model. Though in the
literature system reliability is not always computed, realistic
GTEP formulations must ensure
that system reliability is maintained within reasonable limits
to reflect the legal obligations
to reliability industry members have.
2.3 Evaluating System Cost in Power Systems
An attempt is made to optimize power system operation. This
involves the minimization of
the total production cost with the intent to give rate-payers a
fair electrical price.
Electricity is considered to be a necessity. Thus, to make power
affordable the production
cost, the cost to produce the real and/or reactive power
required to meet the demand,
is minimized. In market-based operation under ISOs in the united
states, this involves
generator bids and market clearing by an independent entity. In
a regulated environment,
this involves more centralized decision-making. Whatever the
case, comparing the cost-based
merit of two power systems involves minimizing the cost of the
system over the lifetime of
-
Elliott J. Mitchell-Colgan Chapter 2. Background 27
the power system infrastructure [34].
In the literature, the total system cost is usually evaluated
using a production cost model
or, for the network-constrained case, an ACOPF or DCOPF with
either piece-wise linear
or parabolic generator cost curves. Though an ACOPF would be
preferable, robust, fast
solvers are still a topic of research [30]. However, the DCOPF
approximation is both fast
and reliable, making it popular in the literature [34, 47]. The
DCOPF’s objective function
is the total cost of real power generation, and one DCOPF is run
per load scenario in a
representative set of load scenarios. The sum of all of the
production costs is considered to
be the total system operating cost over the period that the load
represents. When introducing
investment capital costs as in the GEP and TEP problems, the
operating cost as described
above may be multiplied by a factor to compute the system
operating cost over the service
life of the investments.
Calculating a realistic absolute system cost may be rather
difficult (as is the case with
absolute system reliability). Fortunately, for the purposes of
the GEP and TEP, power
system costs must only be compared. It is generally assumed that
errors in calculating each
system cost are in some sense canceled during the comparison
[3].
2.4 Operational Challenges with Wind Power
Wind is not controllable by humans unlike the fossil fuel inputs
of conventional generators.
Thus, wind turbines are not dispatchable. Furthermore, wind
power output is variable on
many time-scales and unpredictable, as is the wind itself. These
fundamental differences have
caused many operating challenges that must be considered in
power system planning. Large
changes in the power output of a wind farm over short periods of
time (wind power ramps)
have caused or nearly caused blackouts in Texas [22] and Germany
[23, 48]. Forecasting
these ramps to prepare the system against stress is also a
challenge [49, 50, 51]. These
ramps can also require different calibrating of frequency
controls [52, 53]. NREL has shown
-
Elliott J. Mitchell-Colgan Chapter 2. Background 28
that wind also may increase the ancillary servics prices,
volatility of energy prices, and place
require changes to market operations [54, 55]. The variable and
unpredictable nature of wind
may cause a need for an increase in reserve requirements or
dynamic reserve requirements
[56, 57, 58]. Wind power fluctuation can also cause rapid
changes in voltage (flicker) in the
distribution system [59].
Models of wind power vary based on the phenomenon under study.
For incorporation into
power flow (static) models like the OPF and load curtailment,
wind speed is often drawn
as a sample from a Weibull random variable and then converted
into wind turbine or wind
farm power output using key results from Bernoulli’s Equation
from the study of fluid flows
[34]. Computation of power system adequacy metrics like LOLE can
be performed using this
method [3]. Dynamic models require a more accurate wind speed
time-series model such as
a sample of real wind data or simulated data from an ARMA
process. Such models may
include turbine, generator mechanics, and power electronic
controller models [60].
As regulatory incentives and economic viability of installing
wind energy conversion systems
increase, a natural question is where should the wind farms be
installed. In addition to local
considerations like merit of wind portfolio, system
considerations like transmission infras-
tructure and accuracy of aggregate wind power forecasts also
impact the merit of wind farm
sites. Thus, finding the optimal wind farm expansion may benefit
from inclusion into the
expansion plan optimization formulations. From the author’s
previous work shown in [34],
generation expansion to meet the future load in a network
constrained optimization con-
text may produce unrealistic results without considering
appropriate transmission upgrades.
Thus, wind farm expansion lends itself to modeling via GTEP
optimization.
2.5 State of the Art GTEP
The previous literature shows several models that can be used to
solve expansion planning
problems. NREL’s ReEDS [16] is perhaps the most comprehensive,
considering conventional,
-
Elliott J. Mitchell-Colgan Chapter 2. Background 29
renewable resources, storage, and transmission planning with
linear programming, but does
not perform AC power flow. Reserve requirements are computed for
each time period based
on technology and reserve type. Reliability metrics are not
computed internally, and the
planning period is set to two year periods. In [61],
transmission security constraints and
unit commitment are included in a formulation that meets a
desired wind energy penetra-
tion while minimizing investment. That optimization also selects
from among two WECS
technologies. In [62], only the GEP problem is solved, but the
AC power flow is used and
maintenance is scheduled, but reliability is not considered. In
[63], renewable energy, stor-
age, and transmission are expanded, but with a focus on cost of
electricity and emissions.
Roh et. al in [17] propose an optimization framework that
considers the deregulated market
dynamics of generation companies and transmission companies. For
additional review and
a list of available commercial optimizers, [7] is an excellent
resource.
Though several interesting works exist demonstrating the
influence of co-optimizing gener-
ation and transmission expansion, no optimization calculates the
composite generation and
transmission system LOLE including wind generation. Furthermore,
no study benchmarks
the impacts of including load uncertainty in the study, nor in
the comparison of unified
GTEP and sequential GEP and TEP.
-
Chapter 3: Methodology
In the previous chapter, a brief background of load forecasting
and uncertainty, expansion
planning, cost and reliability calculation, and wind modeling
was discussed. In this chapter,
these concepts will be combined to depict the methodology
through which this work attempts
to describe the importance of load uncertainty, impact of
unification of the GEP and TEP,
and demonstrate a sensitivity analysis. Modeling decisions are
justified and alternatives are
briefly discusses.
The chapter is organized as follows. First comes the description
of the general idea of the
optimization framework and solution algorithms which is used to
attain the results. Then,
specifics of the cost and reliability constraint are detailed.
Finally, the procurement of load
and other input data are discussed.
3.1 Optimization Framework
The platform of this work is the optimization framework. It
systematically searches for
a lowest cost (investment and operating cost) expansion plan
that chooses location and
capacity of wind farms and location of transmission upgrades.
Acceptable expansion plans
meet the load of the system within thermal and network
constraints assuming no components
on outage, as well as a constraint on LOLE considering component
outages.
The proposed algorithm contains two inter-related yet distinct
optimization layers. The
30
-
Elliott J. Mitchell-Colgan Chapter 3. Methodology 31
outer optimization layer searches through the investment
decisions. The inner optimization
evaluates the cost merit and reliability feasibility of each of
the candidate solutions generated
by the outer optimization. Such a structure exists because the
operating cost of a given
power system topology is controlled via an optimal power flow in
industry, but the system
topology is precisely the object of desire in this work. An
analogous situation applies for the
system reliability calculation using a minimum curtailment
formulation. The specifics of the
optimization process are discussed below.
3.1.1 Outer Optimization: Search for Candidate Upgrades
The outer optimization systematically selects candidate
expansion plans. That is, candidate
wind farms and transmission lines are selected. Excluding the
sub-optimization problems,
it is a mixed integer linear program (MILP). The constraints are
simple: there is an upper
limit to the number of turbines chosen for each site, and only
pre-selected locations of both
wind farms and transmission lines are acceptable. However, the
objective function must be
calculated by solving an optimization problem, and feasibility
depends on the Monte Carlo
reliability simulation. Because of the complexities of the
formulation, a heuristic optimiza-
tion technique is selected. More specifically, heuristic
optimization techniques do not require
the computation of derivatives of the optimal values of the
optimization subproblems with
respect to the candidate upgrade binary decision variables [29].
Particle Swarm Optimiza-
tion is used in this work because it has become particularly
popular in the power systems
literature, though PSO is by no means the only choice. The outer
optimization problem can
be formulated as is shown in Equation 3.3.
-
Elliott J. Mitchell-Colgan Chapter 3. Methodology 32
minimize Ctotal = CT−Lines + CWindFarms +Q(y, w, ζ)
subject to
0 ≤ yi ≤ ymaxi , ∀i ∈ WF
yi ∈ Z*, ∀i ∈ WF
wi ∈ {0, 1}, ∀i ∈ TL
(3.3)
Where CT−lines is the capital cost of transmission upgrades,
CWindFarms is the capital cost
of wind farms, y and w are the integer variables associated with
the decision to install wind
farms or upgrade transmission.
All of the system data including random variable data is
generated before the algorithm
begins. Generating random data beforehand ensures that all
systems are compared on even
grounds. Benchmarking studies are performed to ensure that the
load, wind speed, and
generator outage datasets are large enough to estimate expected
cost and reliability values.
3.1.2 Inner Optimization Layer: Evaluating Cost and
Reliability
The inner optimization layer evaluates the expected cost and
expected LOLE of the candidate
solution generated by the outer optimization. The cost and
reliability evaluations will be
considered in the next sections.
Computation of the System Cost Function
The cost of a candidate system is computed using the DCOPF over
a predetermined set
of load scenarios. The DCOPF formulation is a convex quadratic
program. It has linear
constraints and the non-negative sum of traditional parabolic
(convex) generator cost curves
[27]. Because load and wind are modeled as random variables, the
cost is computed over
several load scenarios over several wind scenarios to achieve an
expected value. There are no
component outages considered in the cost calculation. MATPOWER’s
DCOPF solver using
-
Elliott J. Mitchell-Colgan Chapter 3. Methodology 33
the default algorithm is used to compute the optimal system cost
[47] for each sample wind
speed and load value. A formulation of the optimization is shown
in Equation 3.4.
minimize Q(y, w, ζ) =∑i∈CG
aiP2i + biPi + ci
subject to
P = B−1θ(∑i∈G
Pi
)−
(∑i∈D
di
)= 0(∑
i∈B
Pi + ci − di
)−∑
k∈TLi
Pik = 0, ∀i ∈ B
Pmini ≤ Pi ≤ Pmaxi , ∀i ∈ CG
ywPminw ≤ Pw ≤ ywPmaxw , ∀w ∈ WF
− Pminij ≤ Pij ≤ Pmaxij , ∀i ∈ TL
− wkPmaxk ≤ Pk ≤ wkPmaxk , ∀k ∈ CTL
(3.4)
where the cost is a minimization of the thermal generators fuel
costs (wind operation costs
are assumed negligible), the first constraint is the DC Power
Flow equation, the second
constraint ensures the demand is equal to the load, the third
constraint is Kirchoff’s Current
Law, the next four constraints bound the thermal and wind farm
generation and transmission
line flows, and the final constraint places a lower bound on the
reliability as explained below.
CG is the set of conventional generators, WF is the set of wind
farms, TL is the set of
existing transmission lines, and CTL is the set of candidate
transmission lines. It should
be noted that pre-processing performed by the author’s code
ensures that the MATPOWER
case has the correct formulation including selected candidate
transmission lines, and thus
no modification is required to the standard DCOPF as described
in [47]. The wind farms
are modeled as PV buses with output determined by transformation
of wind speeds samples
from Weibull random variables. A wind farm may reasonably be
modeled as a PV bus
because wind farms can and do control voltage in the real system
[64].
-
Elliott J. Mitchell-Colgan Chapter 3. Methodology 34
The cost of operation computed as above can be augmented and
added to the investment
cost of the candidate solution to achieve the expected total
system investment plus operating
costs. Because the operating cost is computed over a subset of
hourly loads, it must be
weighted in order to be comparable to the investment cost [65].
The weight is computed
by dividing the expected operating life of the equipment in
hours by the number of hourly
load cases. This is an approximation because the load drives the
system operating costs in a
non-linear fashion, load grows year to year, and only one
planning year was selected for this
methodology. A more thorough and much more computationally
expensive approach would
be to model loads throughout the entire expected life of the
selected candidate equipment.
The service life of the candidate equipment was selected to be
30 years according to recent
energy agreements of wind farms [66], though transmission lines
can have significantly longer
service lives [67].
Computation for the System Reliability Constraint
The system reliability is featured in a constraint in the
inner-optimization. As with any
reliability calculation one must know: 1) the state of the
system components; and 2) how
to calculate the system outage given the system state [43].
Based on the optimization
algorithm, the topology of the system with no components on
outage is fixed and known
in the inner-optimization. The outage histories of each of the
components in the system
are generated through sampling of times to failure (TTF) and
times to repair (TTR) as
in [4]. Equations 3.5 and 3.6 show the sampling equations where
U1 and U2 are uniformly
distributed random number on the interval [0,1] (generated by
MATLAB’s rand() function).
Though other distributions could be used to sample the TTF and
TTR, because we desire
mean behaviour in this work, such extra effort is not necessary
[4]. The reliability models of
the system components are described in Section 3.2.1.
TTF = MTTF ln(U1) (3.5)
-
Elliott J. Mitchell-Colgan Chapter 3. Methodology 35
TTR = MTTR ln(U2) (3.6)
Using the component outage histories generated, the state
duration method is used to com-
pute the system LOLE. The load curtailment is computed for each
system state (accounting
for islands). As shown in Equation 3.8, the estimated system
LOLE is the sum of the
durations of the states for which there is any load on
outage.
The computation of the system outage for a single system state
is performed via load-
curtailment minimization. In this optimization, all committed
generating units are scheduled
to meet the thermal and network constraints with the minimum
curtailment of loads [33].
The LP load-shedding formulation implemented is shown in
equation 3.7.
minimize∑i∈D
ci
subject to
P = B−1θ(∑i∈G
Pi
)−
(∑i∈D
di
)= 0(∑
i∈B
Pi + ci − di
)−∑
k∈TLi
Pik = 0, ∀i ∈ B
Pmini ≤ Pi ≤ Pmaxi , ∀i ∈ CG
ywPminw ≤ Pw ≤ ywPmaxw , ∀w ∈ WF
− Pminij ≤ Pij ≤ Pmaxij , ∀i ∈ TL
− wkPmaxk ≤ Pk ≤ wkPmaxk , ∀k ∈ CTL
(3.7)
where the formulation is almost exactly that of the DCOPF except
that the cost objective
function is the minimization of load curtailment variables. It
should be noted that the
formulation does not include the estimation and bounds on
minimum frequency. This is
done for simplicity, and the interpretation is that this
formulation finds the minimum load
-
Elliott J. Mitchell-Colgan Chapter 3. Methodology 36
to shed such that there exists a steady state solution to the
linearized network. It is also
assumed that the IEEE 14 bus system has no demand resources.
While there are many system outage states, LPs in general are
solved quickly and reliably by
commercial solvers [25]. Because load-shedding is a decision
variable greater than or equal
to zero, a correctly modeled load-shedding minimization does not
suffer from infeasibility
or unbounded-ness. Furthermore, system states can be
intelligently pruned to eliminate
unnecessary computation as in [68], though such pruning is not
performed in this work.
After the system outage for all system states for all islands
has been computed, the estimate
of the total system LOLE can be computed via the Equation 3.8,
taken from [4].
1
NS
∑i∈S
ti (3.8)
where S is the set of states, NS is the number of states, ti is
the duration of state i.
Once the total system reliability has been computed, it can be
compared with the bound
attained by base-lining the original system with the original
load.
The flow diagram in Figure 3.10 depicts the overview of the
algorithm.
3.1.3 Capturing Load Uncertainty in the Optimization
The uncertainty in the future load impacts our investment
decisions. In order to formally
include this uncertainty in the optimization framework, we use
ideas from Stochastic Pro-
gramming. Generally speaking, this type of optimization searches
for optimal decisions (i.e
expansion plans) that must be made before key information (i.e.
future load) is known. The
uncertain information is modeled as a random variable of which
samples can be taken [31].
The sampling of the random variable influences how risky our
decisions are. For example,
samples with low system loads could be rejected resulting in a
bias in the expansion plans
toward expansion plans that minimize cost and meet reliability
for extreme future loads. In
-
Elliott J. Mitchell-Colgan Chapter 3. Methodology 37
Figure 3.10: An overview of the presented algorithm showing the
outer and inner optimiza-
tion
-
Elliott J. Mitchell-Colgan Chapter 3. Methodology 38
this methodology, expectations are computed without bias toward
over or under estimation
of the future load.
In the proposed methodology, the set of future load scenarios to
consider in the inner opti-
mization’s DCOPF and minimum curtailment is uncertain. We
capture the uncertainty by
taking samples from a multivariate Gaussian that considers the
forecast error, thus building
a finite uncertainty set of data for which the DCOPF can be
solved. It is stressed that this
uncertainty set is distinct from a set of loads built by
selecting system loads at different times
during the year. Specifics are given in the load uncertainty
section of the methodology.
3.2 System Reliability Constraint
The Bound on System Reliability
NERC established a ”One day in ten years” criterion for the LOLE
of a system [69] using
estimated forced outage rates for critical system components
[3]. However, adding the NERC
criterion as a constraint to the IEEE 14 Bus System may be
somewhat unhelpful. For
example, it could be the case that the 14 Bus System is
over-built and the ”One day in
ten years” criterion will never be violated even after the load
is scaled according to a load
forecast. Thus, the notion of base-lining applied elsewhere in
the industry is implemented to
attempt to find a bound on the system reliability that will
appropriately limit the feasible
region such that this optimization problem is reasonable and
solutions are interesting.
As the term base-lining implies, the original system is modeled
and used to compute a
reliability value against which system models for the future can
be compared. Thus, the
methodology for evaluating the system reliability mentioned
below is used to compute the
bound for the system without load scaling or candidate upgrade
implementation. The inter-
pretation of a bound (constraint) achieved by base-lining is
that the system LOLE should
not degrade in the planning year of interest.
-
Elliott J. Mitchell-Colgan Chapter 3. Methodology 39
This notion of base-lining also has value in terms of specifying
the length of the Monte Carlo
reliability simulation. The system LOLE can be estimated for the
14 Bus System for a range
of Monte Carlo simulation hours. When the system reliability is
insensitive to an increase
in the simulation hours, it can be assumed that the number of
simulation hours is adequate
to estimate the LOLE. Because the convergence time generally
increases with the number
of random variables (i.e. the number of candidate upgrades
selected), the convergence base-
lining is performed for the system with all candidates selected.
The stopping criterion was
selected to be the smallest time that the coefficient of
variance of the estimated LOLE falls
below 5%. In mathematical terms [4]:
1
E(LOLE)
√√√√ 1N(N − 1)
N∑i=1
(LOLEi − E(LOLE))2 ≤ .05
It was found that slightly under two million simulated hours
were necessary to reach con-
vergence according to the criterion above with outage and wind
datasets and all system
upgrades selected. Thus, two million hours was selected as the
duration of Monte Carlo
reliability simulations in this work.
3.2.1 Reliability Models for Key Power System Components
In order to generate the outage histories necessary for the
stage duration LOLE calcula-
tion in this methodology, a model of generation and transmission
components are required.
These Markov Chain reliability models enable the sampling of
times to failure and times to
repair in order to construct a time series of components maximum
capacities that is repre-
sentative of real world behaviour on average. Both generators
and the transmission system
are modeled with the classical two-state model. No bus failures
are considered in this study.
Typical values for generator state transition rates are taken
from the IEEE Reliability Test
System [70]. Typical values for transmission line state
transition rates are taken from the
Transmission Availability Data System [71].
-
Elliott J. Mitchell-Colgan Chapter 3. Methodology 40
Generator Reliability Modeling
According to the IEEE Standard Definitions for Use in Reporting
Electrical Generating Unit
Reliability, Availability, and Productivity [72], there are many
states in which a generating
unit may reside. A diagram depicting the states is shown in
Figure 3.11. This model’s
complexity is beyond the scope of this work, and col